Embed Size (px)
Citation preview
UR-6-85-5-A
Brugermanual
Version 1.4, Maj 2011

2 UR-6-85-5-A

Indhold
1 Kom godt i gang 71.1 Introduktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
1.1.1 Robotten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.1.2 Programmer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81.1.3 Sikkerhedsvurdering . . . . . . . . . . . . . . . . . . . . . . . . . 9
1.2 Tænd og sluk . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.1 Tænde controllerskabet . . . . . . . . . . . . . . . . . . . . . . . 91.2.2 Tænde robotten . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.3 Initialisere robotten . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.4 Slukke robotten . . . . . . . . . . . . . . . . . . . . . . . . . . . . 91.2.5 Slukke controllerskabet . . . . . . . . . . . . . . . . . . . . . . . 10
1.3 Quick start, trin for trin . . . . . . . . . . . . . . . . . . . . . . . . . . . . 101.4 Monteringsvejledning . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
1.4.1 Robottens arbejdsradius . . . . . . . . . . . . . . . . . . . . . . . 121.4.2 Motering af robotten . . . . . . . . . . . . . . . . . . . . . . . . 121.4.3 Montering af værktøj . . . . . . . . . . . . . . . . . . . . . . . . 121.4.4 Montering af controllerskabet . . . . . . . . . . . . . . . . . . . 121.4.5 Montering af touchskærmen . . . . . . . . . . . . . . . . . . . . 151.4.6 Tilslutning af robotkabel . . . . . . . . . . . . . . . . . . . . . . . 151.4.7 Tilslutning af lysnetkabel . . . . . . . . . . . . . . . . . . . . . . . 15
2 Elektrisk interface 172.1 Introduktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.2 Vigtige meddelelser . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 172.3 Sikkerhedsinterfacet . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 18
2.3.1 Nødstop Interfacet . . . . . . . . . . . . . . . . . . . . . . . . . . 182.3.2 Beskyttelsesinterfacet . . . . . . . . . . . . . . . . . . . . . . . . 202.3.3 Automatisk fortsættelse efter beskyttelsesstop . . . . . . . . . 21
2.4 Controller I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 222.4.1 Digitale udgange . . . . . . . . . . . . . . . . . . . . . . . . . . . 232.4.2 Digitale indgange . . . . . . . . . . . . . . . . . . . . . . . . . . 242.4.3 Analoge udgange . . . . . . . . . . . . . . . . . . . . . . . . . . 252.4.4 Analoge inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 26
2.5 Værktøj I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 272.5.1 Digitale udgange . . . . . . . . . . . . . . . . . . . . . . . . . . . 282.5.2 Digitale indgange . . . . . . . . . . . . . . . . . . . . . . . . . . 292.5.3 Analoge inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3 PolyScope Software 313.1 Indledning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 32
3.1.1 Velkomstskærm . . . . . . . . . . . . . . . . . . . . . . . . . . . . 333.1.2 Initialiseringsskærm . . . . . . . . . . . . . . . . . . . . . . . . . . 34
3
Indhold
3.2 Skærmredigering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 353.2.1 Taltastatur pa skærm . . . . . . . . . . . . . . . . . . . . . . . . 353.2.2 Tastatur pa skærm . . . . . . . . . . . . . . . . . . . . . . . . . . 353.2.3 On-screen udtryksredigering . . . . . . . . . . . . . . . . . . . . 36
3.3 Robotstyring . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.3.1 Bevæg-faneblad . . . . . . . . . . . . . . . . . . . . . . . . . . . 363.3.2 I/O Faneblad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.3.3 Modbus I/O . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 383.3.4 AutoMove Faneblad . . . . . . . . . . . . . . . . . . . . . . . . . 403.3.5 Installation→ Hent / Gem . . . . . . . . . . . . . . . . . . . . . . 413.3.6 Installation→ TCP Position . . . . . . . . . . . . . . . . . . . . . . 413.3.7 Installation→ Montering . . . . . . . . . . . . . . . . . . . . . . 423.3.8 Installation→ I/O Opsætning . . . . . . . . . . . . . . . . . . . 433.3.9 Installation→ Standardprogram . . . . . . . . . . . . . . . . . . 443.3.10 Modbus I/O Setup . . . . . . . . . . . . . . . . . . . . . . . . . . 443.3.11 Log-faneblad . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.3.12 Load Skærm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 473.3.13 Kørsel-faneblad . . . . . . . . . . . . . . . . . . . . . . . . . . . . 49
3.4 Programmering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 493.4.1 Program→ Nyt program . . . . . . . . . . . . . . . . . . . . . . 503.4.2 Program-faneblad . . . . . . . . . . . . . . . . . . . . . . . . . . 503.4.3 Program→ Kommando-faneblad, <Tom> . . . . . . . . . . . 513.4.4 Program→ Kommando-faneblad, Bevæg . . . . . . . . . . . 523.4.5 Program→ Kommando-faneblad, Fast Viapunkt . . . . . . . . 533.4.6 Program→ Kommando-faneblad, Relativt viapunkt . . . . . . 543.4.7 Program→ Kommando-faneblad, Variabelt viapunkt . . . . . 553.4.8 Program→ Kommando-faneblad, Vent . . . . . . . . . . . . . 553.4.9 Program→ Kommando-faneblad, Handling . . . . . . . . . . 563.4.10 Program→ Kommando-faneblad, Popup . . . . . . . . . . . . 563.4.11 Program→ Kommando-faneblad, Stop . . . . . . . . . . . . . 573.4.12 Program→ Kommando-faneblad, Kommentar . . . . . . . . . 573.4.13 Program→ Kommando-faneblad, Mappe . . . . . . . . . . . 583.4.14 Program→ Kommando-faneblad, Gentag . . . . . . . . . . . 583.4.15 Program→ Kommando-faneblad, Underprogram . . . . . . . 593.4.16 Program→ Kommando-faneblad, Kald Underprogram . . . . 593.4.17 Program→ Kommando-faneblad, Tildeling . . . . . . . . . . . 603.4.18 Program→ Kommando-faneblad, Hvis . . . . . . . . . . . . . . 603.4.19 Program→ Kommando-faneblad, Script . . . . . . . . . . . . . 613.4.20 Program→ Kommando-faneblad, Hændelse . . . . . . . . . 623.4.21 Program→ Kommando-faneblad, Trad . . . . . . . . . . . . . 623.4.22 Program→ Kommando-faneblad, Mønster . . . . . . . . . . . 633.4.23 Program→ Kommando-faneblad, Palletering . . . . . . . . . 643.4.24 Program→ Kommando-faneblad, Stabling . . . . . . . . . . . 653.4.25 Program→ Kommando-faneblad, Suppress . . . . . . . . . . . 683.4.26 Program→ Grafik Faneblad . . . . . . . . . . . . . . . . . . . . 693.4.27 Program→ Struktur-faneblad . . . . . . . . . . . . . . . . . . . . 703.4.28 Program→ Variable-faneblad . . . . . . . . . . . . . . . . . . . 713.4.29 Program→ Kommando-faneblad, Initialisering af variable . . 71
3.5 Setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 723.5.1 Setup Skærm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 723.5.2 Setup Skærm→ Initialisering . . . . . . . . . . . . . . . . . . . . 733.5.3 Setup Skærm→ Valg af sprog . . . . . . . . . . . . . . . . . . . 733.5.4 Setup Skærm→ Opdatering . . . . . . . . . . . . . . . . . . . . 73
4 UR-6-85-5-A

Indhold
3.5.5 Setup Skærm→ Password . . . . . . . . . . . . . . . . . . . . . 743.5.6 Setup Skærm→ Kalibrer trykskærm . . . . . . . . . . . . . . . . 743.5.7 Setup Skærm→ Netværk . . . . . . . . . . . . . . . . . . . . . . 75
4 Sikkerhed 774.1 Introduktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 774.2 Lovpligtig dokumentation . . . . . . . . . . . . . . . . . . . . . . . . . . 774.3 Risikovurdering . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 77
5 Garantier 795.1 Garanti . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
5.1.1 Produktgaranti . . . . . . . . . . . . . . . . . . . . . . . . . . . . 795.1.2 Disclaimer . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 79
6 Inkorporeringserklæring 816.1 Indledning . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 81
6.1.1 Produktfabrikant . . . . . . . . . . . . . . . . . . . . . . . . . . . 816.1.2 Person bemyndiget til at udarbejde den relevante tekniske
dokumentation . . . . . . . . . . . . . . . . . . . . . . . . . . . . 816.1.3 Beskrivelse og identifikation af produktet . . . . . . . . . . . . . 816.1.4 Væsentlige krav . . . . . . . . . . . . . . . . . . . . . . . . . . . 826.1.5 Nationale myndigheders kontaktinformation . . . . . . . . . . 846.1.6 Vigtig information . . . . . . . . . . . . . . . . . . . . . . . . . . . 846.1.7 Sted og dato for erklæring . . . . . . . . . . . . . . . . . . . . . 846.1.8 Den bemyndigede persons identitet og underskrift . . . . . . 84
A Euromap67 Interfacet 85A.1 Introduktion . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 85
A.1.1 Euromap67 standard . . . . . . . . . . . . . . . . . . . . . . . . 86A.1.2 CE . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 86
A.2 Robot og IMM integration . . . . . . . . . . . . . . . . . . . . . . . . . . 86A.2.1 Nødstop og sikkerhedsstop . . . . . . . . . . . . . . . . . . . . . 86A.2.2 Tilslutning af et MAF lysværn . . . . . . . . . . . . . . . . . . . . 86A.2.3 Montering af robot og værktøj . . . . . . . . . . . . . . . . . . . 87A.2.4 Brug af robotten uden IMM . . . . . . . . . . . . . . . . . . . . . 87A.2.5 Euromap12 til euromap67 konvertering . . . . . . . . . . . . . 87
A.3 GUI . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 88A.3.1 Euromap67 programskabelon . . . . . . . . . . . . . . . . . . . 88A.3.2 I/O overblik og fejlfinding . . . . . . . . . . . . . . . . . . . . . . 89A.3.3 Funktionalitet i programstrukturen . . . . . . . . . . . . . . . . . 91A.3.4 I/O handling og vent . . . . . . . . . . . . . . . . . . . . . . . . 95
A.4 Installation og afinstallation af interfacet . . . . . . . . . . . . . . . . . 95A.4.1 Installation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96A.4.2 Afinstallation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 96
A.5 Elektriske karakteristica . . . . . . . . . . . . . . . . . . . . . . . . . . . 97A.5.1 MAF lysværn interface . . . . . . . . . . . . . . . . . . . . . . . . 97A.5.2 Nødstop, sikkerhedsudstyr og MAF signaler . . . . . . . . . . . 97A.5.3 Digitale Inputs . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 98A.5.4 Digitale Outputs . . . . . . . . . . . . . . . . . . . . . . . . . . . 98
5 UR-6-85-5-A

Indhold
6 UR-6-85-5-A

Kapitel 1
Kom godt i gang
1.1 Introduktion
Tillykke med købet af din nye Universal Robot, UR-6-85-5-A.
Robotten er en maskine der kan programmeres til at bevæge et værktøj, ogkommunikere med andre maskiner ved hjælp af elektriske signaler. Med vorespatenterede programmeringsinterface, PolyScope, er det nemt at programme-re robotten til at bevæge værktøjet langs en ønsket bane. PolyScope er beskre-vet i afsnit 3.1.
Læseren af denne manual forventes at være teknisk minded, at være for-trolig med de almene grundlæggende begreber for programmering, at værei stand til at forbinde en ledning til en skrueterminal, og være i stand til at borehul i en metalplade. Ingen særlig viden om robotter, hverken i almindelighedeller til Universal Robots er pakrævet.
Resten af dette kapitel er en appetitvækker til at komme i gang med robot-ten.
7
1.1. Introduktion
1.1.1 Robotten
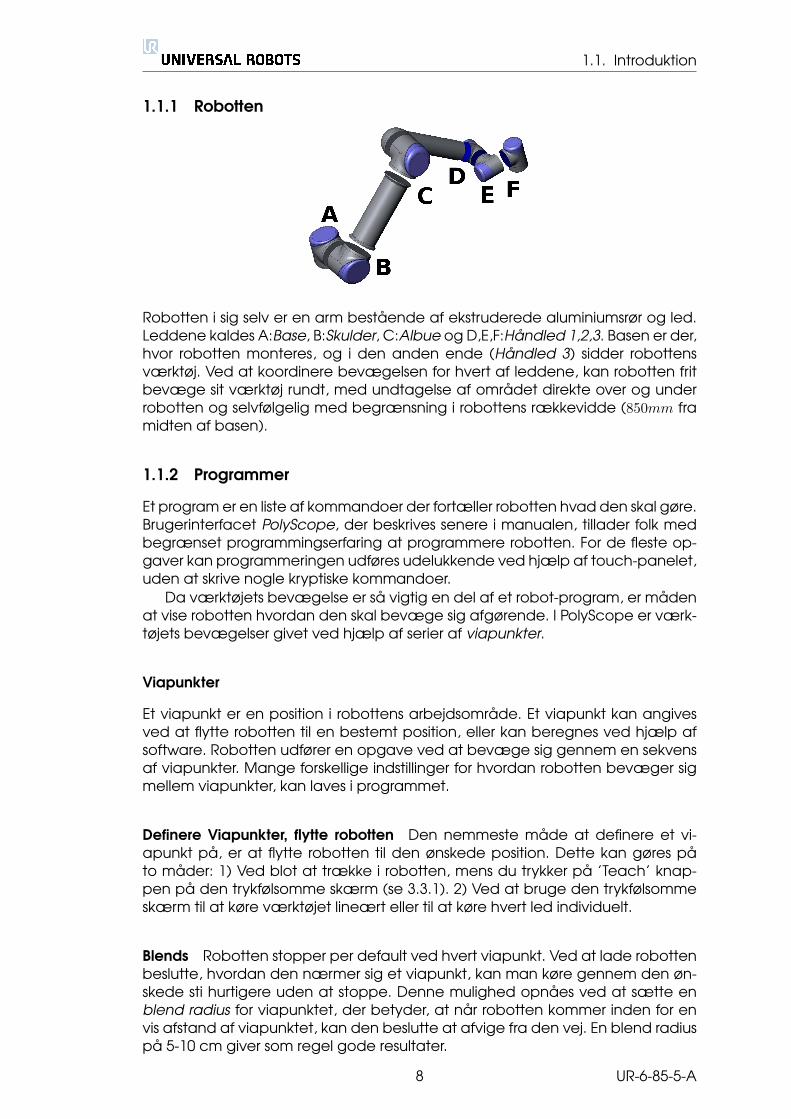
Robotten i sig selv er en arm bestaende af ekstruderede aluminiumsrør og led.Leddene kaldes A:Base, B:Skulder, C:Albue og D,E,F:Handled 1,2,3. Basen er der,hvor robotten monteres, og i den anden ende (Handled 3) sidder robottensværktøj. Ved at koordinere bevægelsen for hvert af leddene, kan robotten fritbevæge sit værktøj rundt, med undtagelse af omradet direkte over og underrobotten og selvfølgelig med begrænsning i robottens rækkevidde (850mm framidten af basen).
1.1.2 Programmer
Et program er en liste af kommandoer der fortæller robotten hvad den skal gøre.Brugerinterfacet PolyScope, der beskrives senere i manualen, tillader folk medbegrænset programmingserfaring at programmere robotten. For de fleste op-gaver kan programmeringen udføres udelukkende ved hjælp af touch-panelet,uden at skrive nogle kryptiske kommandoer.
Da værktøjets bevægelse er sa vigtig en del af et robot-program, er madenat vise robotten hvordan den skal bevæge sig afgørende. I PolyScope er værk-tøjets bevægelser givet ved hjælp af serier af viapunkter.
Viapunkter
Et viapunkt er en position i robottens arbejdsomrade. Et viapunkt kan angivesved at flytte robotten til en bestemt position, eller kan beregnes ved hjælp afsoftware. Robotten udfører en opgave ved at bevæge sig gennem en sekvensaf viapunkter. Mange forskellige indstillinger for hvordan robotten bevæger sigmellem viapunkter, kan laves i programmet.
Definere Viapunkter, flytte robotten Den nemmeste made at definere et vi-apunkt pa, er at flytte robotten til den ønskede position. Dette kan gøres pato mader: 1) Ved blot at trække i robotten, mens du trykker pa ’Teach’ knap-pen pa den trykfølsomme skærm (se 3.3.1). 2) Ved at bruge den trykfølsommeskærm til at køre værktøjet lineært eller til at køre hvert led individuelt.
Blends Robotten stopper per default ved hvert viapunkt. Ved at lade robottenbeslutte, hvordan den nærmer sig et viapunkt, kan man køre gennem den øn-skede sti hurtigere uden at stoppe. Denne mulighed opnaes ved at sætte enblend radius for viapunktet, der betyder, at nar robotten kommer inden for envis afstand af viapunktet, kan den beslutte at afvige fra den vej. En blend radiuspa 5-10 cm giver som regel gode resultater.
8 UR-6-85-5-A

1.2. Tænd og sluk
Funktioner
Ud over at bevæge sig gennem viapunkter, kan programmet sende I / O-signalertil andre maskiner pa visse punkter i robottens bane, og udføre kommandoersom hvis..sa og loop, baseret pa variable og I/O signaler.
1.1.3 Sikkerhedsvurdering
Robotten er en maskine og som sadan er en sikkerhedsvurdering pakrævet forenhver installation af robotten. Kapitel 4.1 beskriver hvordan man udfører ensikkerhedsvurdering.
1.2 Tænd og sluk
Hvordan man tænder og slukker de forskellige dele af robotsystemet, beskrivesi de følgende underafsnit.
1.2.1 Tænde controllerskabet
Controllerskabet tændes ved at trykke pa knappen ’On’, forrest pa controller-skabet. Nar controllerskabet er tændt, vises en masse tekst pa skærmen. Efterca. 30 sekunder, kommer Universal Robots logo til syne, med teksten ’Loading’.Efter godt 40 sekunder vises nogle fa knapper pa skærmen og en popup viltvinge brugeren til at ga til initialiseringsskærmen.
1.2.2 Tænde robotten
Robotten kan tændes hvis controllerskabet er tændt, og ingen nødstopknapperer aktiveret. Robotten tændes fra initialiseringsskærmen, ved at trykke pa knap-pen ’ON’ pa skærmen og derefter pa ’Start’. Nar den tændes, høres en lyd,idet bremserne laser op. Nar robotten er tændt, skal den initialiseres, før denkan begynde at udføre arbejdet.
1.2.3 Initialisere robotten
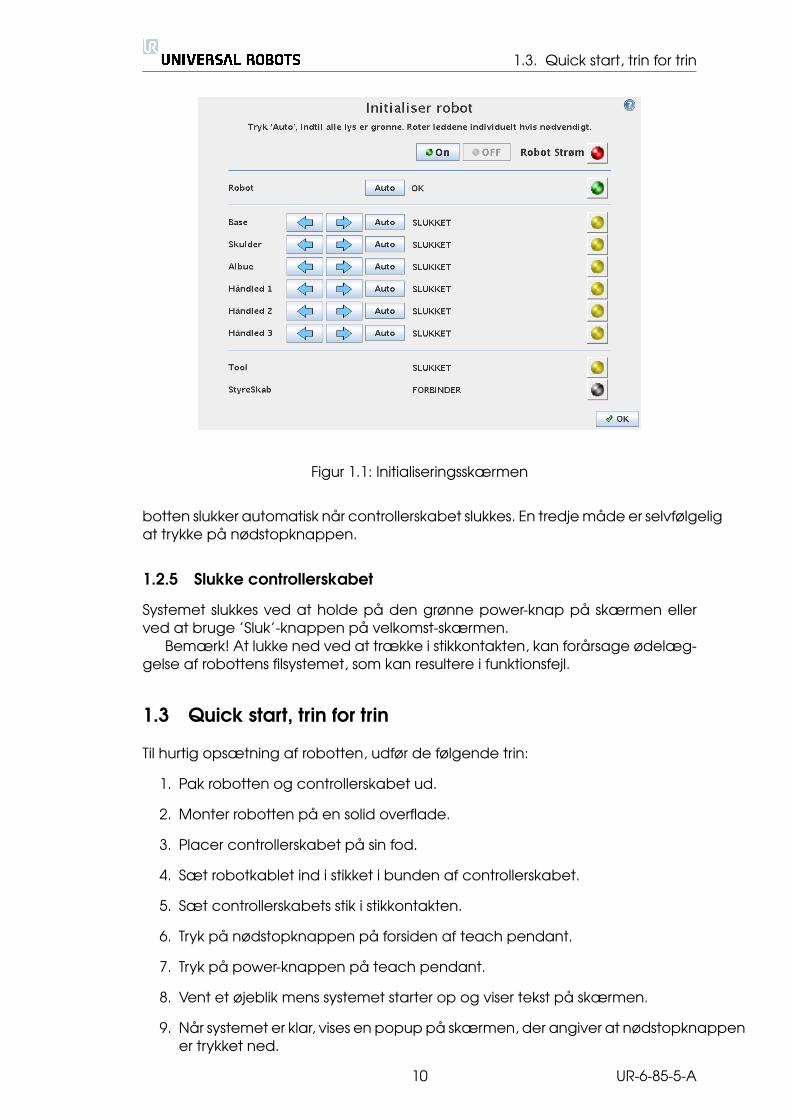
Nar der er strøm pa robotten, skal hvert af robottens led finde sin nøjagtige posi-tion, ved at flytte til en udgangsposition. Hvert stort led har omkring 20 udgangs-positioner, jævnt fordelt over et leds omdrejning. De sma led har omkring 10. I-nitialiseringsskærmen vist i figur 1.1, giver adgang til manuel og semi-automatiskkørsel af robottens led, for at flytte dem til en udgangsposition. Robotten kanikke automatisk undga kollision med sig selv eller omgivelserne under denneproces. Derfor bør man udvise forsigtighed.
Knappen Auto næsten øverst pa skærmen kører alle led indtil de er klar. Narden slippes og trykkes igen, ændrer alle led kørselsretning. Knappen Manueltillader manuel kørsel af hvert led.
En mere detaljeret beskrivelse af initialiseringsskærmen findes i afsnit 3.1.2.
1.2.4 Slukke robotten
Strømmen til robotten kan slukkes ved at trykke pa ’OFF’ knappen pa initialise-ringsskærmen. De fleste brugere behøver ikke at bruge denne funktion, da ro-
9 UR-6-85-5-A
1.3. Quick start, trin for trin
Figur 1.1: Initialiseringsskærmen
botten slukker automatisk nar controllerskabet slukkes. En tredje made er selvfølgeligat trykke pa nødstopknappen.
1.2.5 Slukke controllerskabet
Systemet slukkes ved at holde pa den grønne power-knap pa skærmen ellerved at bruge ’Sluk’-knappen pa velkomst-skærmen.
Bemærk! At lukke ned ved at trække i stikkontakten, kan forarsage ødelæg-gelse af robottens filsystemet, som kan resultere i funktionsfejl.
1.3 Quick start, trin for trin
Til hurtig opsætning af robotten, udfør de følgende trin:
1. Pak robotten og controllerskabet ud.
2. Monter robotten pa en solid overflade.
3. Placer controllerskabet pa sin fod.
4. Sæt robotkablet ind i stikket i bunden af controllerskabet.
5. Sæt controllerskabets stik i stikkontakten.
6. Tryk pa nødstopknappen pa forsiden af teach pendant.
7. Tryk pa power-knappen pa teach pendant.
8. Vent et øjeblik mens systemet starter op og viser tekst pa skærmen.
9. Nar systemet er klar, vises en popup pa skærmen, der angiver at nødstopknappener trykket ned.
10 UR-6-85-5-A
1.3. Quick start, trin for trin
10. Tryk pa Til initialiseringsskærmen knappen i popup’en.
11. Las nødstopknappen op. Robottens status ændres fra ’Nødstoppet’ til ’Ro-bot Power Off’.
12. Tryk pa On knappen pa skærmen. Vent et par sekunder.
13. Tryk pa Start knappen pa skærmen. Robotten laver en lyd og bevægersig lidt mens bremserne lases op.
14. Tryk pa de bla pile og flyt leddene rundt indtil hvert ”LEDlys”i højre side afskærmen bliver grønt. Vær omhyggelig med ikke at køre robotten ind i sigselv eller i noget andet.
15. Alle led er nu OK. Et tryk pa exit-knappen, frembringer Velkomst skærmen.
16. Tryk pa PROGRAM Robot knappen og vælg Tomt program.
17. Tryk pa Next knappen (nederst til højre) sa <empty> linjen vælges i træ-strukturen pa venstre side af skærmen.
18. Ga til Struktur fanebladet.
19. Tryk pa Bevæg knappen.
20. Ga til Kommando fanebladet.
21. Tryk pa Næste knappen, for at ga til Viapunkt indstillinger.
22. Tryk pa Sæt dette viapunkt knappen ved siden af "?" billedet.
23. Pa Bevæg skærmen, kan du flytte robotten ved at trykke pa de forskelligebla pile eller ved at holde Teach knappen nede mens du trækker robotar-men rundt.
24. Tryk paOK.
25. Tryk pa Tilføj viapunkt før.
26. Tryk paSæt dette viapunkt knappen ved siden af "?" billedet.
27. Pa Bevæg skærmen kan du flytte robotten ved at trykke pa de forskelligebla pile eller ved at holde Teach knappen nede mens du trækker robotar-men rundt.
28. Tryk pa OK.
29. Dit program er klar. Robotten vil bevæge sig mellem de to punkter nardu trykker pa ’Afspil’ symbolet. Udvis agtpagivenhed, være evt. klar til attrykke pa nødstop-knappen og tryk pa ’Afspil’.
30. Til lykke! Du har nu produceret dit første robotprogram, der flytter robot-ten mellem to givne positioner. Husk, at du skal foretage en risikovurderingog evt. forbedre den samlede sikkerhedstilstand, før robotten virkelig skal iarbejde.
11 UR-6-85-5-A
1.4. Monteringsvejledning
Fra siden pa skra
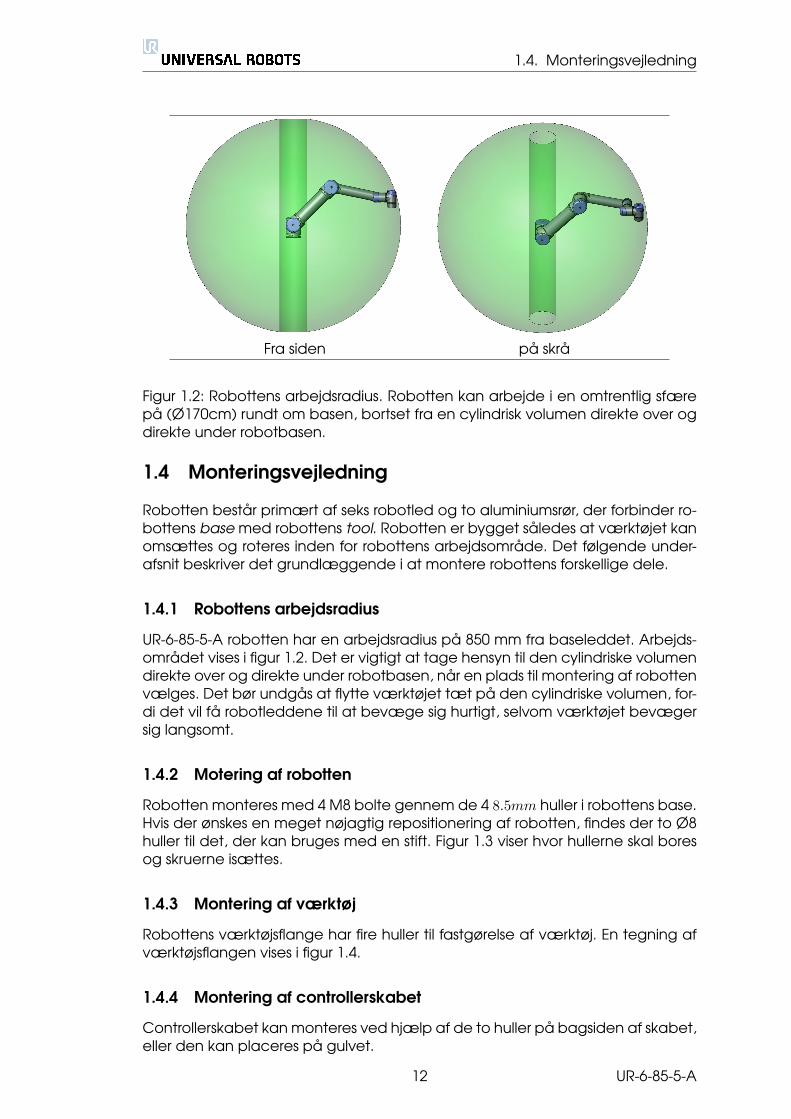
Figur 1.2: Robottens arbejdsradius. Robotten kan arbejde i en omtrentlig sfærepa (Ø170cm) rundt om basen, bortset fra en cylindrisk volumen direkte over ogdirekte under robotbasen.
1.4 Monteringsvejledning
Robotten bestar primært af seks robotled og to aluminiumsrør, der forbinder ro-bottens base med robottens tool. Robotten er bygget saledes at værktøjet kanomsættes og roteres inden for robottens arbejdsomrade. Det følgende under-afsnit beskriver det grundlæggende i at montere robottens forskellige dele.
1.4.1 Robottens arbejdsradius
UR-6-85-5-A robotten har en arbejdsradius pa 850 mm fra baseleddet. Arbejds-omradet vises i figur 1.2. Det er vigtigt at tage hensyn til den cylindriske volumendirekte over og direkte under robotbasen, nar en plads til montering af robottenvælges. Det bør undgas at flytte værktøjet tæt pa den cylindriske volumen, for-di det vil fa robotleddene til at bevæge sig hurtigt, selvom værktøjet bevægersig langsomt.
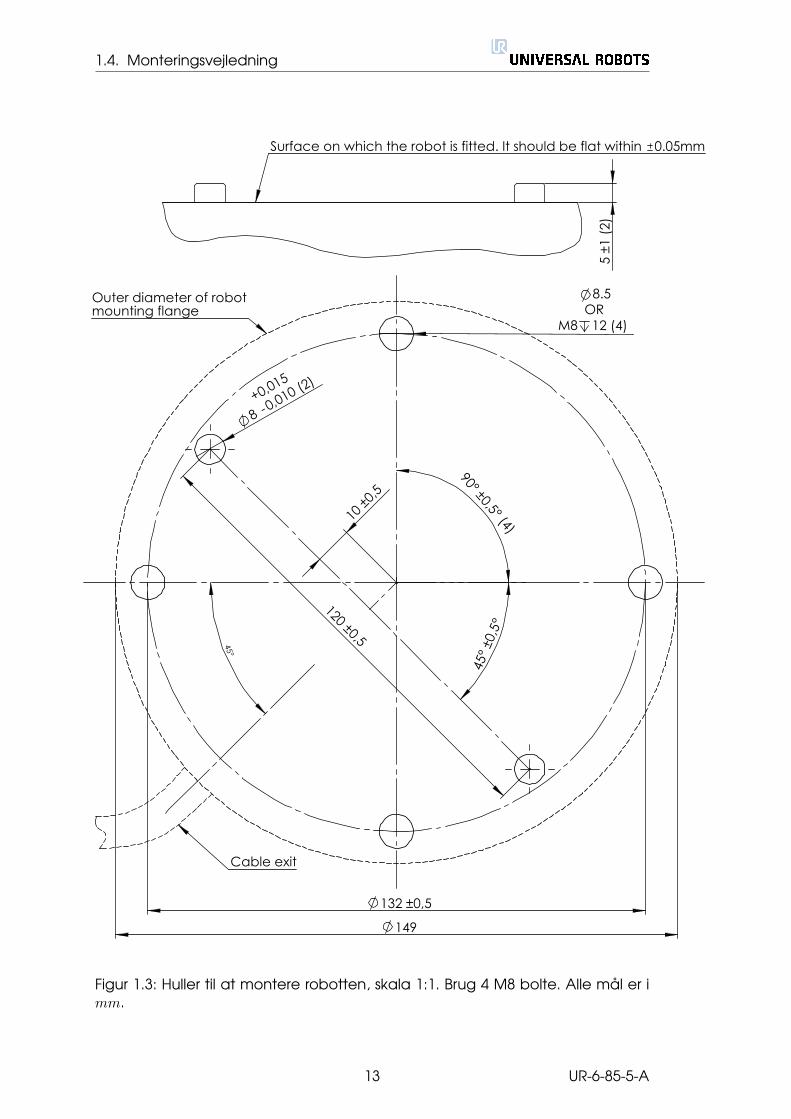
1.4.2 Motering af robotten
Robotten monteres med 4 M8 bolte gennem de 4 8.5mm huller i robottens base.Hvis der ønskes en meget nøjagtig repositionering af robotten, findes der to Ø8huller til det, der kan bruges med en stift. Figur 1.3 viser hvor hullerne skal boresog skruerne isættes.
1.4.3 Montering af værktøj
Robottens værktøjsflange har fire huller til fastgørelse af værktøj. En tegning afværktøjsflangen vises i figur 1.4.
1.4.4 Montering af controllerskabet
Controllerskabet kan monteres ved hjælp af de to huller pa bagsiden af skabet,eller den kan placeres pa gulvet.
12 UR-6-85-5-A
1.4. Monteringsvejledning
90°±0,5°
45°
120 (2)
±0,5°
45°
±0,5
10 (4)
±0,5
5±1
132 ±0,5
Outer diameter of robot
0.05mm
mounting flange
Surface on which the robot is fitted. It should be flat within
Cable exit
(2)
0,010
-8
+0,015
149
M8 12 (4)
8.5OR
Figur 1.3: Huller til at montere robotten, skala 1:1. Brug 4 M8 bolte. Alle mal er imm.
13 UR-6-85-5-A

1.4. Monteringsvejledning
31,5
0+0,0
25(H
7)
50
63-0
,05
0 (h
8)
75
60+0
,015
(H7)
90° (x4)45
°
A
A
Lum
berg
RKM
V 8
-354
con
nect
or
M6
6,0
(x4)
33
46,6
19,5
6,5 5 6,5
6
SEC
TION
A-A
Figur 1.4: Værktøjsoutputflangen, ISO 9409-1-50-4-M6. Det er her værktøjet mon-teres pa robotten. Alle mal er i mm.
14 UR-6-85-5-A
1.4. Monteringsvejledning
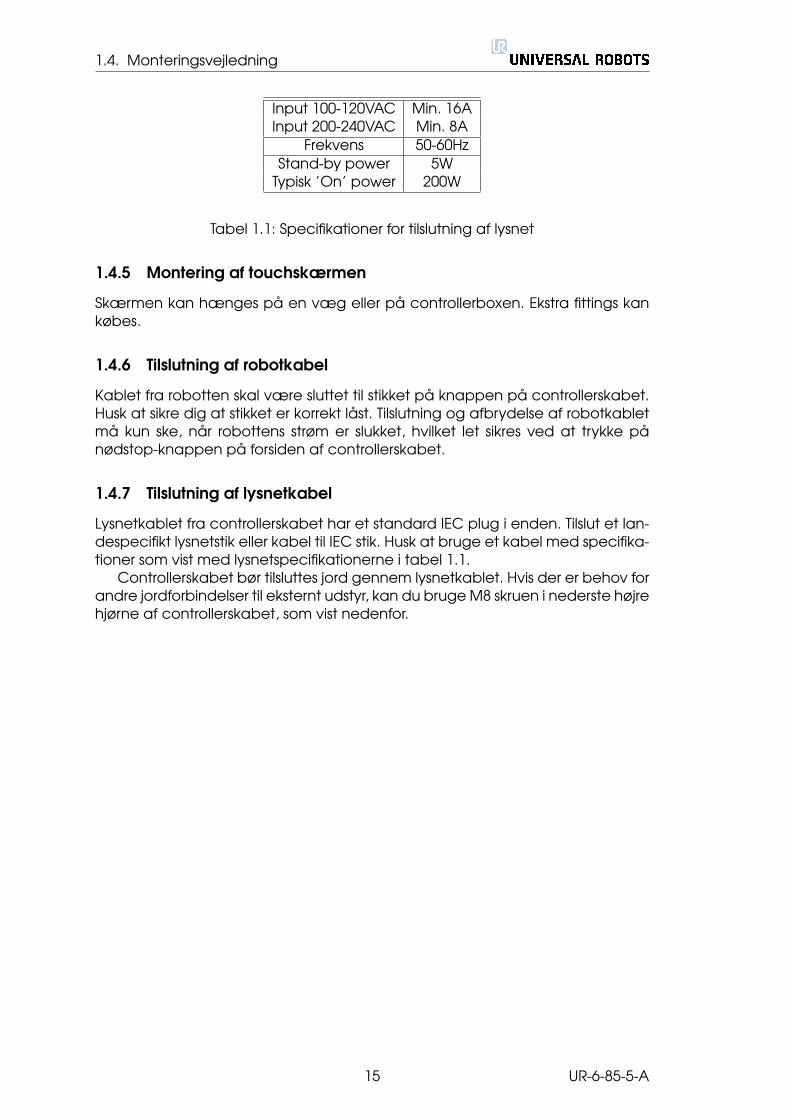
Input 100-120VAC Min. 16AInput 200-240VAC Min. 8A
Frekvens 50-60HzStand-by power 5W
Typisk ’On’ power 200W
Tabel 1.1: Specifikationer for tilslutning af lysnet
1.4.5 Montering af touchskærmen
Skærmen kan hænges pa en væg eller pa controllerboxen. Ekstra fittings kankøbes.
1.4.6 Tilslutning af robotkabel
Kablet fra robotten skal være sluttet til stikket pa knappen pa controllerskabet.Husk at sikre dig at stikket er korrekt last. Tilslutning og afbrydelse af robotkabletma kun ske, nar robottens strøm er slukket, hvilket let sikres ved at trykke panødstop-knappen pa forsiden af controllerskabet.
1.4.7 Tilslutning af lysnetkabel
Lysnetkablet fra controllerskabet har et standard IEC plug i enden. Tilslut et lan-despecifikt lysnetstik eller kabel til IEC stik. Husk at bruge et kabel med specifika-tioner som vist med lysnetspecifikationerne i tabel 1.1.
Controllerskabet bør tilsluttes jord gennem lysnetkablet. Hvis der er behov forandre jordforbindelser til eksternt udstyr, kan du bruge M8 skruen i nederste højrehjørne af controllerskabet, som vist nedenfor.
15 UR-6-85-5-A

1.4. Monteringsvejledning
16 UR-6-85-5-A

Kapitel 2
Elektrisk interface
2.1 Introduktion
Robotten er en maskine, der kan programmeres til at flytte et værktøj rundt i ro-bottens arbejdsomrade. Ofte er det ønsket at koordinere robottens bevægelsermed maskiner i nærheden eller med udstyr pa værktøjet. Den enkleste madeat opna dette er ofte ved hjælp af det elektriske interface.
Der findes elektriske indgange/udgange (I/O) inde i controllerskabet og parobottens værktøjsflange. Dette kapitel forklarer hvordan udstyr forbindes til dis-se I/O. Nogle I/O i controllerskabet er dedikeret til robottens nødstop-funktion,og andre I/O til generelle formal, kan forbindes til andre maskiner og andet ud-styr. I/O til generelle formal kan styrs direkte via I/O fanebladet pa den grafiskebrugergrænseflade, som forklaret i afsnit 3.3.2, eller via robotprogrammerne.
For yderligere I / O, kan Modbus enheder tilføjes via det ekstra Ethernet-stik icontrollerskabet.
2.2 Vigtige meddelelser
Bemærk at ifølge IEC 61000 og EN 61000 standarderne ma kabler fra control-lerskabet til andet maskinel og virksomhedsudstyr ikke være længere end 30m,medmindre der udføres udvidede tests.
Bemærk at der refereres til alle minus-forbindelser som GND og at de forbindes tilrobottens skjold og controllerskabet. Alle nævnte GDN-forbindelser er dog kuntil strøm og signalering. Ved PE (Protective Earth), brug en af de to M6 størrelseskrueforbindelser inde i controllerskabet. Hvis FE (Functional Earth) er nødvendig,brug en af M3 skruerne tæt pa skrueterminalerne.
Bemærk, at i dette kapitel er alle uspecificerede spændings- og strømdata iDC.Det er generelt vigtigt at holde sikkerhedsinterfacets signaler adskilt fra de ge-nerelle I/O-interface signaler. Desuden bør sikkerhedsinterface aldrig tilsluttes enPLC, der ikke er en sikkerheds-PLC med det korrekte sikkerhedsniveau. Hvis den-ne regel ikke følges, er det ikke muligt at opna et højt sikkerhedsniveau, da enfejl i en generel I/O kan forhindre et sikkerhedsstopsignal i at resultere i et stop.
17

2.3. Sikkerhedsinterfacet
2.3 Sikkerhedsinterfacet
Inde i controllerskabet sidder et panel med skrueterminaler. Den yderste ven-stre del, vist med sort ovenfor, udgør sikkerhedsinterfacet.Sikkerhedsinterfacetkan bruges til at forbinde robotten til andre maskiner eller beskyttelsesudstyr, forat sikre at robotten stopper i bestemte situationer.
Sikkerhedsinterfacet bestar af to dele; nødstopinterfacet og beskyttelsesstopinterfacet, nærmere beskrevet i de følgende afsnit. Nedenstaende tabel op-summerer deres forskelle:
Nødstop BeskyttelsesstopArsager Manuel Manuel eller automatikProgramafvikling Stop PauserBremser Aktive Ikke aktiveMotor power Off BegrænsetNulstil Manuel Automatisk eller manuelUse frequency Infrequent Every cycle to infrequentKræver ny initialisering Frigiv kun bremser NejRobot stopper bevægelse Ja JaPræstationsniveau ISO 13849-1 PLd ISO 13849-1 PLd
2.3.1 Nødstop Interfacet
[TA] Test udgang A[TB] Test udgang B[EO1] Nødstop udgang tilslutning 1[EO2] Nødstop udgang tilslutning 2[EO3] Nødstop udgang tilslutning 3[EO4] Nødstop udgang tilslutning 4[EA] Robot nødstop indgang A (Positiv)[EB] Robot nødstop indgang B (Negativ)[EEA] Ekstern nødstop indgang A (Positiv)[EEB] Ekstern nødstop B (Negativ)[24V] +24V forsyning til sikkerhedsudstyr[GND] 0V forsyning til sikkerhedsudstyr
Nødstopinterfacet har to indgange, robot nødstopindgangen og den eksternenødstopindgang. Hver indgang er redundant for at overholde sikkerheds perfor-mance niveau d.
Robot nødstop interfacet stopper robotten, og sætter nødstopudgangen,beregnet til brug af sikkerhedsudstyr i nærheden af robotten. Det eksterne nødstopvil ogsa stoppe robotten, men pavirker ikke nødstoppets udgang og er aleneberegnet for tilslutning til andre maskiner.
18 UR-6-85-5-A
2.3. Sikkerhedsinterfacet
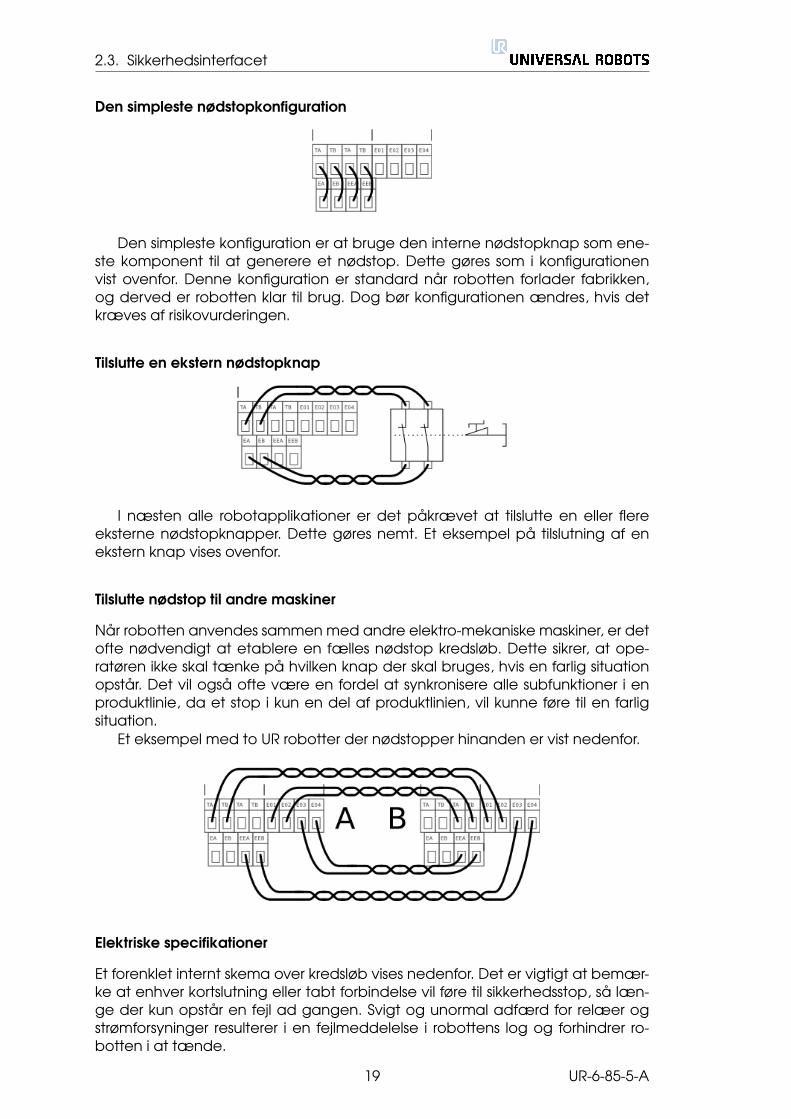
Den simpleste nødstopkonfiguration
Den simpleste konfiguration er at bruge den interne nødstopknap som ene-ste komponent til at generere et nødstop. Dette gøres som i konfigurationenvist ovenfor. Denne konfiguration er standard nar robotten forlader fabrikken,og derved er robotten klar til brug. Dog bør konfigurationen ændres, hvis detkræves af risikovurderingen.
Tilslutte en ekstern nødstopknap
I næsten alle robotapplikationer er det pakrævet at tilslutte en eller flereeksterne nødstopknapper. Dette gøres nemt. Et eksempel pa tilslutning af enekstern knap vises ovenfor.
Tilslutte nødstop til andre maskiner
Nar robotten anvendes sammen med andre elektro-mekaniske maskiner, er detofte nødvendigt at etablere en fælles nødstop kredsløb. Dette sikrer, at ope-ratøren ikke skal tænke pa hvilken knap der skal bruges, hvis en farlig situationopstar. Det vil ogsa ofte være en fordel at synkronisere alle subfunktioner i enproduktlinie, da et stop i kun en del af produktlinien, vil kunne føre til en farligsituation.
Et eksempel med to UR robotter der nødstopper hinanden er vist nedenfor.
Elektriske specifikationer
Et forenklet internt skema over kredsløb vises nedenfor. Det er vigtigt at bemær-ke at enhver kortslutning eller tabt forbindelse vil føre til sikkerhedsstop, sa læn-ge der kun opstar en fejl ad gangen. Svigt og unormal adfærd for relæer ogstrømforsyninger resulterer i en fejlmeddelelse i robottens log og forhindrer ro-botten i at tænde.
19 UR-6-85-5-A
2.3. Sikkerhedsinterfacet
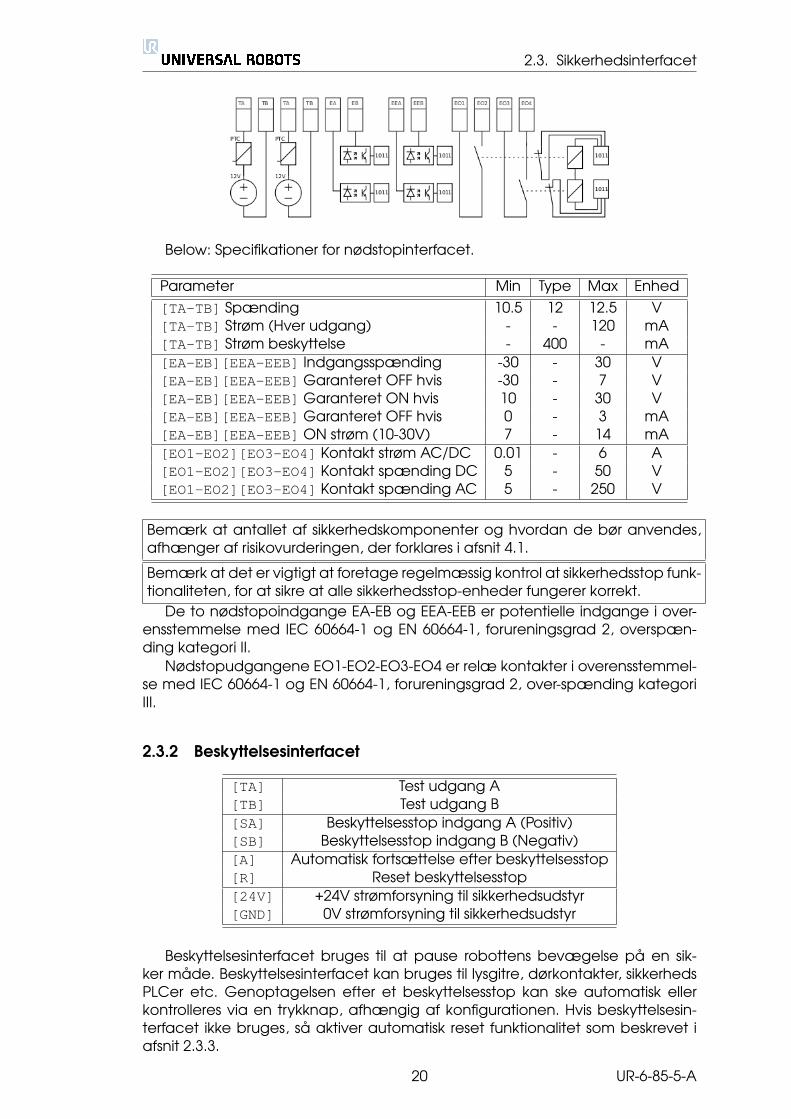
Below: Specifikationer for nødstopinterfacet.
Parameter Min Type Max Enhed[TA-TB] Spænding 10.5 12 12.5 V[TA-TB] Strøm (Hver udgang) - - 120 mA[TA-TB] Strøm beskyttelse - 400 - mA[EA-EB][EEA-EEB] Indgangsspænding -30 - 30 V[EA-EB][EEA-EEB] Garanteret OFF hvis -30 - 7 V[EA-EB][EEA-EEB] Garanteret ON hvis 10 - 30 V[EA-EB][EEA-EEB] Garanteret OFF hvis 0 - 3 mA[EA-EB][EEA-EEB] ON strøm (10-30V) 7 - 14 mA[EO1-EO2][EO3-EO4] Kontakt strøm AC/DC 0.01 - 6 A[EO1-EO2][EO3-EO4] Kontakt spænding DC 5 - 50 V[EO1-EO2][EO3-EO4] Kontakt spænding AC 5 - 250 V
Bemærk at antallet af sikkerhedskomponenter og hvordan de bør anvendes,afhænger af risikovurderingen, der forklares i afsnit 4.1.
Bemærk at det er vigtigt at foretage regelmæssig kontrol at sikkerhedsstop funk-tionaliteten, for at sikre at alle sikkerhedsstop-enheder fungerer korrekt.
De to nødstopoindgange EA-EB og EEA-EEB er potentielle indgange i over-ensstemmelse med IEC 60664-1 og EN 60664-1, forureningsgrad 2, overspæn-ding kategori II.
Nødstopudgangene EO1-EO2-EO3-EO4 er relæ kontakter i overensstemmel-se med IEC 60664-1 og EN 60664-1, forureningsgrad 2, over-spænding kategoriIII.
2.3.2 Beskyttelsesinterfacet
[TA] Test udgang A[TB] Test udgang B[SA] Beskyttelsesstop indgang A (Positiv)[SB] Beskyttelsesstop indgang B (Negativ)[A] Automatisk fortsættelse efter beskyttelsesstop[R] Reset beskyttelsesstop[24V] +24V strømforsyning til sikkerhedsudstyr[GND] 0V strømforsyning til sikkerhedsudstyr
Beskyttelsesinterfacet bruges til at pause robottens bevægelse pa en sik-ker made. Beskyttelsesinterfacet kan bruges til lysgitre, dørkontakter, sikkerhedsPLCer etc. Genoptagelsen efter et beskyttelsesstop kan ske automatisk ellerkontrolleres via en trykknap, afhængig af konfigurationen. Hvis beskyttelsesin-terfacet ikke bruges, sa aktiver automatisk reset funktionalitet som beskrevet iafsnit 2.3.3.
20 UR-6-85-5-A

2.3. Sikkerhedsinterfacet
Tilslutning af dørkontakt
Tilslutning af dørkontakt eller lignende gøres som vist ovenfor. Husk at brugeen reset knap konfiguration, hvis robotten ikke skal starte automatisk nar dørenlukkes igen.
Tilslutning af lysgitter
Ovenfor vises hvordan et lysgitter tilsluttes. Det er ogsa muligt at anvende etkategori 1 (ISO 13849-1 og EN 954-1) lysgitter hvis risikovurderingen tillader det.Nar du tilslutter et kategori 1 lysgitter, sa brug TA og SA og forbind derefter TB ogSB med en ledning. Husk at bruge en reset knap konfiguration, sa beskyttelses-stoppet lases.
Tilslutning af reset knap
Ovenfor vises hvordan en reset knap tilsluttes. Reset knappen ma ikke væretrykket ned permanent. Hvis reset knappen sidder fast, genereres et beskyttel-sesstop og en fejlmeddelelse vises pa log-skærmen.
2.3.3 Automatisk fortsættelse efter beskyttelsesstop
Beskyttelsesinterfacet kan nulstille sig selv nar en beskyttelsesstop situation erslut. Hvordan man aktiverer automatisk reset funktionaliteten vises ovenfor. Den-ne konfiguration anbefales ogsa, hvis beskyttelsesinterfacet ikke anvendes. Det
21 UR-6-85-5-A

2.4. Controller I/O
anbefales dog ikke at bruge automatisk reset, hvis en reset-knap-konfigurationer mulig. Automatisk reset er beregnet til specielle installationer og installationermed andre maskiner.
Elektriske specifikationer
Til forstaelse af beskyttelsesfunktionaliteten, vises et forenklet internt skema afkredsløbet nedenfor. Enhver fejl i sikkerhedssystemet vil føre til et sikkerhedsstopaf robotten og en fejlmeddelelse vises pa log-skærmen.
Parameter Min Type Max Enhed24V spænding tolerance -15% - +20% -Strøm tilgængelig fra 24V forsyning - - 1.2∗ AOverbelastningsbeskyttelse - 1.4 - A[TA-TB][A↑][R↑] Spænding 10.5 12 12.5 V[TA-TB][A↑][R↑] Strøm - - 120 mA[TA-TB][A↑][R↑] Strømbeskyttelse - 400 - mA[SA-SB] Indgangsspænding -30 - 30 V[SA-SB] Garanteret OFF hvis -30 - 7 V[SA-SB] Garanteret ON hvis 10 - 30 V[SA-SB] Garanteret OFF hvis 0 - 3 mA[SA-SB] ON strøm (10-30V) 7 - 14 mA[A↓][R↓] Indgang spænding -30 - 30 V[A↓][R↓] Indgang garanteret OFF hvis -30 - 7 V[A↓][R↓] Indgang garanteret ON hvis 10 - 30 V[A↓][R↓] Garanteret OFF hvis 0 - 5 mA[A↓][R↓] ON strøm (10-30V) 6 - 10 mA
Beskyttelsesstop indgangen SA-SB er en potentiel indgang i overensstemmel-se med IEC 60664-1 og EN 60664-1, forureningsgrad 2, over-spænding kategoriII.Bemærk at de gule 24V forbindelser far strøm fra den samme interne 24Vstrømforsyning som 24V forbindelserne for de normale I/O, og at maksimum pa1.2 A er for begge strømkilder tilsammen.
2.4 Controller I/O
Inde i controllerskabet er der et panel af skrueterminaler med forskellige I/O,som vist ovenfor. Længst til højre i panelet sidder de generelle I/O..
22 UR-6-85-5-A

2.4. Controller I/O
[24V] +24V strømtilslutning[GND] 0V strømtilslutning[DOx] Digital udgang nummer x[DIx] Digital indgang nummer x[AOx] Analog udgang nummer x plus[AG] Analog udgang GND[Ax+] Analog indgang nummer x plus[Ax-] Analog indgang nummer x minus
I/O panelet i controllerskabet har 8 digitale og 2 analoge indgange, 8 digi-tale og 2 analoge udgange, og en indbygget 24V strømforsyning. Digitale ind-gange og udgange er pnp teknologi og konstrueret i overensstemmelse medIEC 61131-2 og EN 61131-2. 24V og GND kan bruges som indgang for I/O mo-dulet eller udgang som en 24V strømforsyning. Nar controllerskabet starter op,kontrollerer det om spændingen er anvendt pa 24V forbindelsen fra en eksternstrømforsyning, og hvis ikke, slutter det automatisk til den interne 24V strøm-forsyning.
Elektriske specifikationer for den interne strømforsyning
Parameter Min Type Max EnhedIntern 24V spænding tolerance -15% - +20% -
Strøm fra intern 24V forsyning - - 1.2∗ AOverbelastningsbeskyttelse - 1.4 - A
Ekstern strømforsyningsspænding 10 - 30 V
Bemærk at 24V forbindelserne for beskyttelse (gul) far strøm fra den sammeinterne 24V strømforsyning som 24V forbindelserne for de normale I/O, og atmaksimum pa 1.2 A er for begge strømkilder tilsammen.
Hvis 24V strømforsyningen overbelastes, udskrives en fejlbesked pa log-skærmen.Strømforsyningen vil automatisk forsøge at gendanne sig efter et par sekunder.
2.4.1 Digitale udgange
Parameter Min Type Max EnhedStrømkilde per udgang 0 - 2 A
Strømkilde for alle udgange tilsammen 0 - 4 ASpændingsfald ved ON 0 - 0.2 V
Lækstrøm nar OFF 0 0 - 0.1 mA
Udgangene kan bruges til at styre udstyr direkte, f.eks. pneumatiske relæereller til kommunikation med andre PLC systemer. Udgangene er konstrueret ioverensstemmelse med alle tre typer digitale indgange defineret i IEC 61131-2og EN 61131-2, og med alle krav til digitale udgange fra de samme standarder.
Alle digital udgange kan deaktiveres automatisk nar et program er stoppet,ved at bruge afkrydsningsfeltet “Altid lav ved program stop” pa I/O skærmbille-det (se afsnit 3.3.8). I denne tilstand er udgangen altid lav nar et program ikkekører.
De digitale udgange er ikke strømbegrænsede og overskridelse af specifi-serede data kan forarsage permanent skade. Det er dog ikke muligt at beska-dige udgangene hvis den interne 24V strømforsyning er brugt pa grund af sinstrømbeskyttelse.
23 UR-6-85-5-A
2.4. Controller I/O
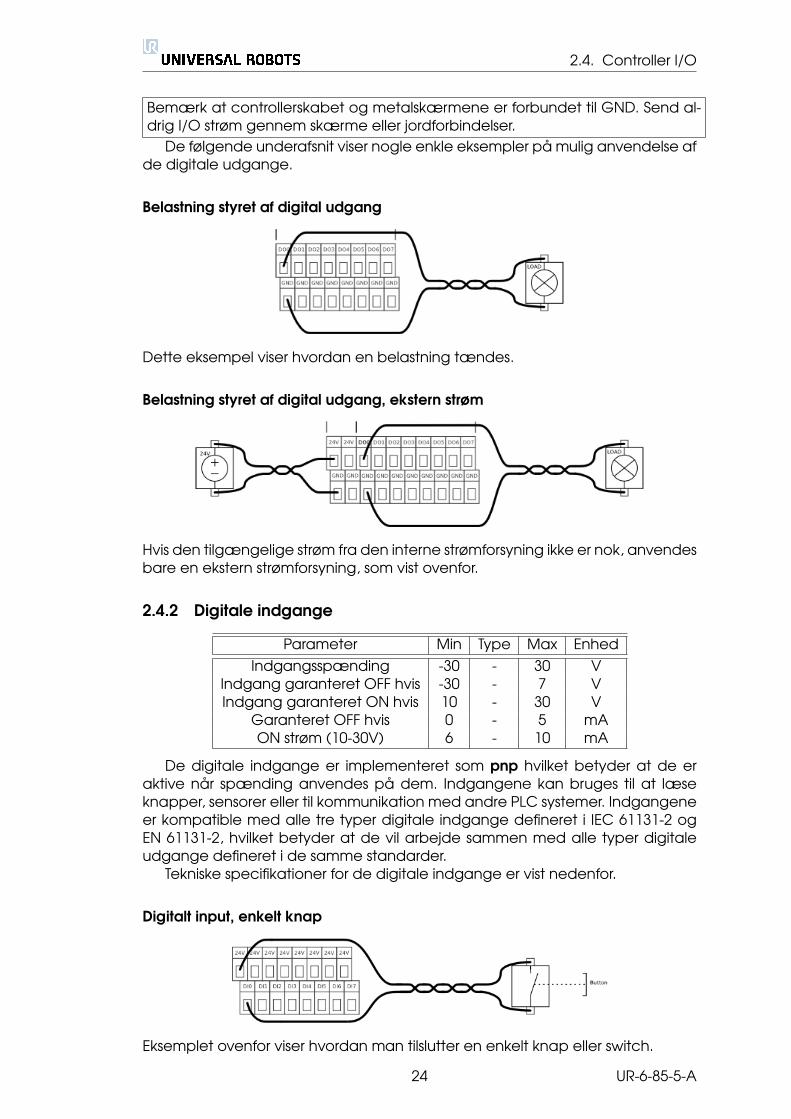
Bemærk at controllerskabet og metalskærmene er forbundet til GND. Send al-drig I/O strøm gennem skærme eller jordforbindelser.
De følgende underafsnit viser nogle enkle eksempler pa mulig anvendelse afde digitale udgange.
Belastning styret af digital udgang
Dette eksempel viser hvordan en belastning tændes.
Belastning styret af digital udgang, ekstern strøm
Hvis den tilgængelige strøm fra den interne strømforsyning ikke er nok, anvendesbare en ekstern strømforsyning, som vist ovenfor.
2.4.2 Digitale indgange
Parameter Min Type Max EnhedIndgangsspænding -30 - 30 V
Indgang garanteret OFF hvis -30 - 7 VIndgang garanteret ON hvis 10 - 30 V
Garanteret OFF hvis 0 - 5 mAON strøm (10-30V) 6 - 10 mA
De digitale indgange er implementeret som pnp hvilket betyder at de eraktive nar spænding anvendes pa dem. Indgangene kan bruges til at læseknapper, sensorer eller til kommunikation med andre PLC systemer. Indgangeneer kompatible med alle tre typer digitale indgange defineret i IEC 61131-2 ogEN 61131-2, hvilket betyder at de vil arbejde sammen med alle typer digitaleudgange defineret i de samme standarder.
Tekniske specifikationer for de digitale indgange er vist nedenfor.
Digitalt input, enkelt knap
Eksemplet ovenfor viser hvordan man tilslutter en enkelt knap eller switch.
24 UR-6-85-5-A
2.4. Controller I/O
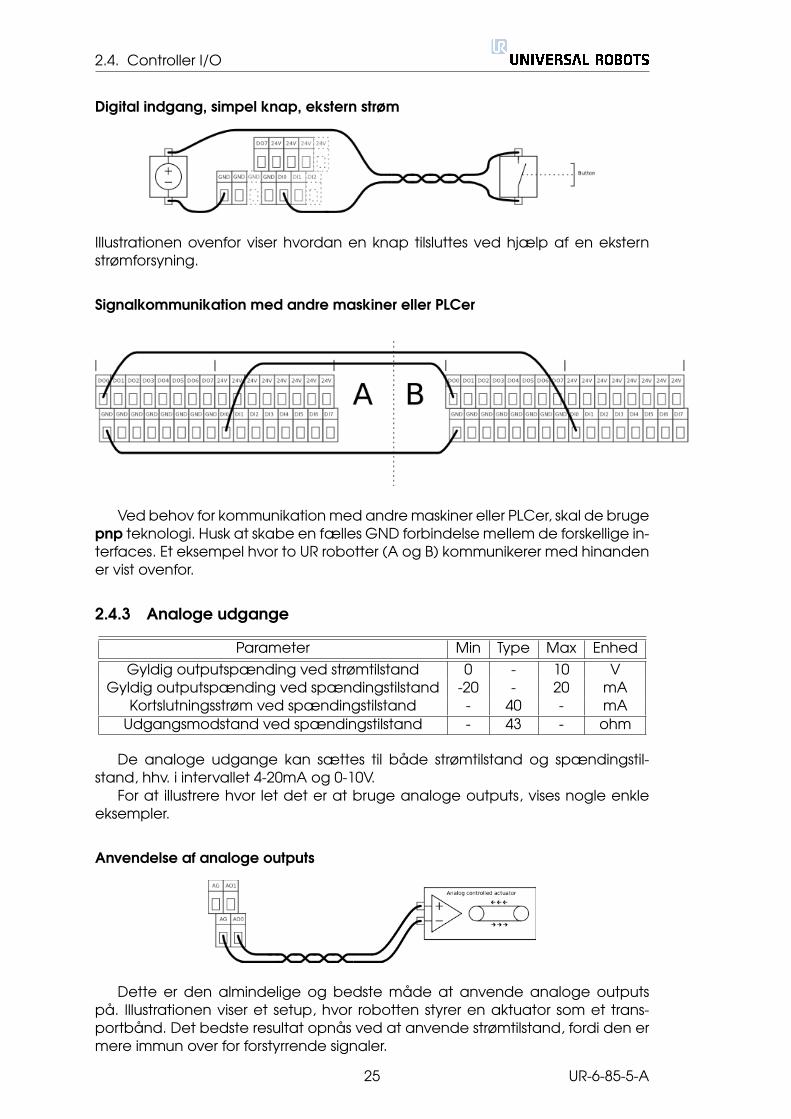
Digital indgang, simpel knap, ekstern strøm
Illustrationen ovenfor viser hvordan en knap tilsluttes ved hjælp af en eksternstrømforsyning.
Signalkommunikation med andre maskiner eller PLCer
Ved behov for kommunikation med andre maskiner eller PLCer, skal de brugepnp teknologi. Husk at skabe en fælles GND forbindelse mellem de forskellige in-terfaces. Et eksempel hvor to UR robotter (A og B) kommunikerer med hinandener vist ovenfor.
2.4.3 Analoge udgange
Parameter Min Type Max EnhedGyldig outputspænding ved strømtilstand 0 - 10 V
Gyldig outputspænding ved spændingstilstand -20 - 20 mAKortslutningsstrøm ved spændingstilstand - 40 - mA
Udgangsmodstand ved spændingstilstand - 43 - ohm
De analoge udgange kan sættes til bade strømtilstand og spændingstil-stand, hhv. i intervallet 4-20mA og 0-10V.
For at illustrere hvor let det er at bruge analoge outputs, vises nogle enkleeksempler.
Anvendelse af analoge outputs
Dette er den almindelige og bedste made at anvende analoge outputspa. Illustrationen viser et setup, hvor robotten styrer en aktuator som et trans-portband. Det bedste resultat opnas ved at anvende strømtilstand, fordi den ermere immun over for forstyrrende signaler.
25 UR-6-85-5-A

2.4. Controller I/O
Anvendelse af de analoge outputs, ikke-differentielt signal
Hvis det kontrollerede udstyr ikke tager et differentielt input, kan en alternativløsning laves som vist ovenfor. Denne løsning er ikke særlig god i forhold til støj,og kan nemt hente forstyrrende signaler fra andre maskiner. Vær omhyggeligmed ledningstilslutningen, og husk pa at forstyrrende signaler induceret ind ianaloge outputs ogsa kan være til stede pa andre analoge I/O.
2.4.4 Analoge inputs
Parameter Min Type Max EnhedCommon mode indgangsspænding -33 - 33 V
Differential mode indgangsspænding* -33 - 33 VDifferential indgangsmodstand - 220 - kohm
Common mode indgangsmodstand - 55 - kohmCommon mode rejection 75 - - dB
De analoge inputs kan indstilles til fire forskellige spændingsomrader, som erimplementeret pa forskellige mader, og derfor kan have forskellige offsets oggenerere fejl. Den angivne differential mode indgangsspænding er kun gyldigmed en common mode spænding pa 0V. For at gøre det klart, hvor let det erat bruge analoge udgange, er nogle enkle eksempler vist.
Anvendelse af analoge indgange, differentielt spændingsinput
Den enkleste made at anvende analoge indgange. Det viste udstyr, somkunne være en sensor, har et differentiel spændingsoutput.
Anvendelse af analoge indgange, ikke-differentielt spændingsinput
Hvis det ikke er muligt at opna et differentieret signal fra det anvendte udstyr,kunne en løsning ligne opsætningen ovenfor. I modsætning til eksemplet medden ikke-differentielle analoge udgang i afsnit 2.4.3, vil denne løsning være næ-sten lige sa god som de differentielle løsninger.
26 UR-6-85-5-A

2.5. Værktøj I/O
Anvendelse af analoge indgange, differentielt strøminput
Nar længere kabler benyttes, eller hvis det er et meget støjende miljø, erstrømbaserede signaler at foretrække. Desuden leveres noget udstyr kun medstrømudgang. For at bruge strøm som indgang, er en ekstern modstand nødvendigsom vist ovenfor. Værdien af modstanden vil normalt være omkring 200 ohm,og det bedste resultat opnas, nar modstanden er tæt pa skrueterminalerne pacontrolleren.Bemærk, at tolerancen for modstand og ohm, der ændres pa grund af tempe-raturen, skal lægges til fejlspecifikationerne for de analoge inputs.
Anvendelse af analoge indgange, ikke-differentiel strømindgang
Hvis udstyrets udgang er et ikke-diffentielt strømsignal, skal en modstand bru-ges som vist ovenfor. Modstanden skal være omkring 200 ohm og forholdet mel-lem spændingen pa controllerens indgang og sensorens udgang gives ved:
Spænding = Strøm x Modstand
Bemærk, at tolerancen for modstand og ohm, der ændres pa grund af tempe-raturen, skal lægges til fejlspecifikationerne for de analoge indgange.
2.5 Værktøj I/O
Pa robottens værktøj er der et lille stik med otte tilslutninger.
27 UR-6-85-5-A

2.5. Værktøj I/O
Farve signalRød 0V (GND)Gra 0V/12V/24V (POWER)Bla digital udgang 8 (DO8)Pink digital udgang 9 (DO9)Gul digital indgang 8 (DI8)
Grøn digital indgang 9 (DI9)Hvid analog indgang 2 (AI2)Brun analog indgang 3 (AI3)
Dette stik giver strøm og kontrolsignaler til gribere og sensorer, tilknyttet robo-tværktøjet. Stikket kan bruges til at reducere ledningsføringen mellem værktøjetog controllerskabet. Stikket er et standard Lumberg RSMEDG8, som passer medet kabel af typen RKMV 8-354.Bemærk at værktøjsflangen er forbundet til GND (det samme som den rødeledning).
Specifikationer for den interne strømforsyning
Parameter Min Type Max EnhedForsyningsspænding i 24V tilstand TBD 24 TBD VForsyningsspænding i 12V tilstand TBD 12 TBD V
Forsyningsstrøm ved begge tilstande - - 600 mAKortslutningsbeskyttelse - 650 - mA
Kapasitiv load - - TBD uFInduktiv load - - TBD uH
Den tilgængelige strømforsyning kan indstilles til enten 0V, 12V eller 24V pa I/O-fanebladet i den grafiske brugergrænseflade (se afsnit 3.3.2). Vær forsigtig, nardu bruger 12V, da eventuelle fejl kan forarsage skift af spænding til 24V, som kanbeskadige udstyret og endda forarsage brand.
Det interne kontrolsystem vil generere en fejl til robotten log, hvis strømmenoverskrider sin grænse. Værktøjets forskellige I/O beskrives i de følgende tre un-derafsnit.
2.5.1 Digitale udgange
Parameter Min Type Max EnhedSpænding nar aben -0.5 - 26 VSpænding nar lav 1A - 0.05 0.20 V
Strøm nar lav 0 - 1 AStrøm gennem GND - - 1 A
Switch tid - 1000 - usKapasitiv load - - TBD uFInduktiv load - - TBD uH
De digitale udgange er implementeret sa de kun kan trække ned til GND(OV) og ikke levere strøm. Nar en digital udgang er aktiveret, sa trækkes denkorresponderende forbindelse lav, og nar den er deaktiveret, sa er den korre-sponderende forbindelse aben (open-collector/open-drain). Den primære for-skel mellem digitale udgange i controllerskabet og i værktøjet, er reduceretstrøm p.g.a. den lille værktøjskonnektor.
28 UR-6-85-5-A
2.5. Værktøj I/O
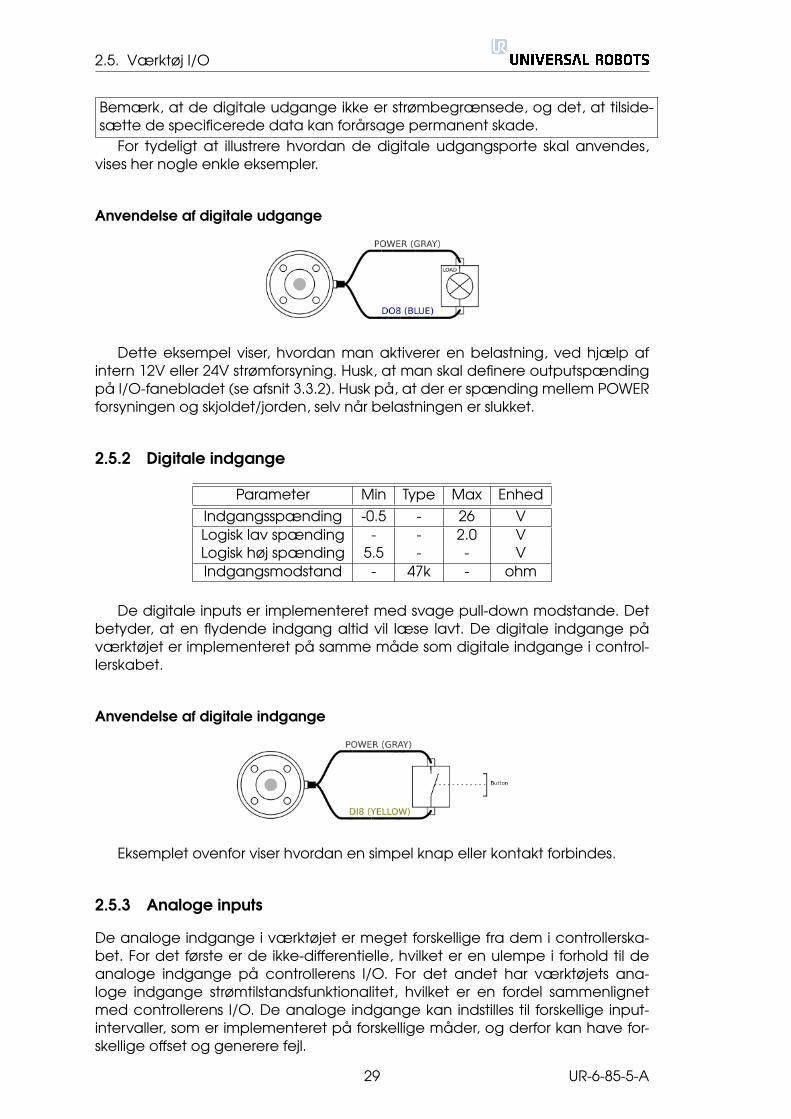
Bemærk, at de digitale udgange ikke er strømbegrænsede, og det, at tilside-sætte de specificerede data kan forarsage permanent skade.
For tydeligt at illustrere hvordan de digitale udgangsporte skal anvendes,vises her nogle enkle eksempler.
Anvendelse af digitale udgange
Dette eksempel viser, hvordan man aktiverer en belastning, ved hjælp afintern 12V eller 24V strømforsyning. Husk, at man skal definere outputspændingpa I/O-fanebladet (se afsnit 3.3.2). Husk pa, at der er spænding mellem POWERforsyningen og skjoldet/jorden, selv nar belastningen er slukket.
2.5.2 Digitale indgange
Parameter Min Type Max EnhedIndgangsspænding -0.5 - 26 VLogisk lav spænding - - 2.0 VLogisk høj spænding 5.5 - - VIndgangsmodstand - 47k - ohm
De digitale inputs er implementeret med svage pull-down modstande. Detbetyder, at en flydende indgang altid vil læse lavt. De digitale indgange paværktøjet er implementeret pa samme made som digitale indgange i control-lerskabet.
Anvendelse af digitale indgange
Eksemplet ovenfor viser hvordan en simpel knap eller kontakt forbindes.
2.5.3 Analoge inputs
De analoge indgange i værktøjet er meget forskellige fra dem i controllerska-bet. For det første er de ikke-differentielle, hvilket er en ulempe i forhold til deanaloge indgange pa controllerens I/O. For det andet har værktøjets ana-loge indgange strømtilstandsfunktionalitet, hvilket er en fordel sammenlignetmed controllerens I/O. De analoge indgange kan indstilles til forskellige input-intervaller, som er implementeret pa forskellige mader, og derfor kan have for-skellige offset og generere fejl.
29 UR-6-85-5-A
2.5. Værktøj I/O
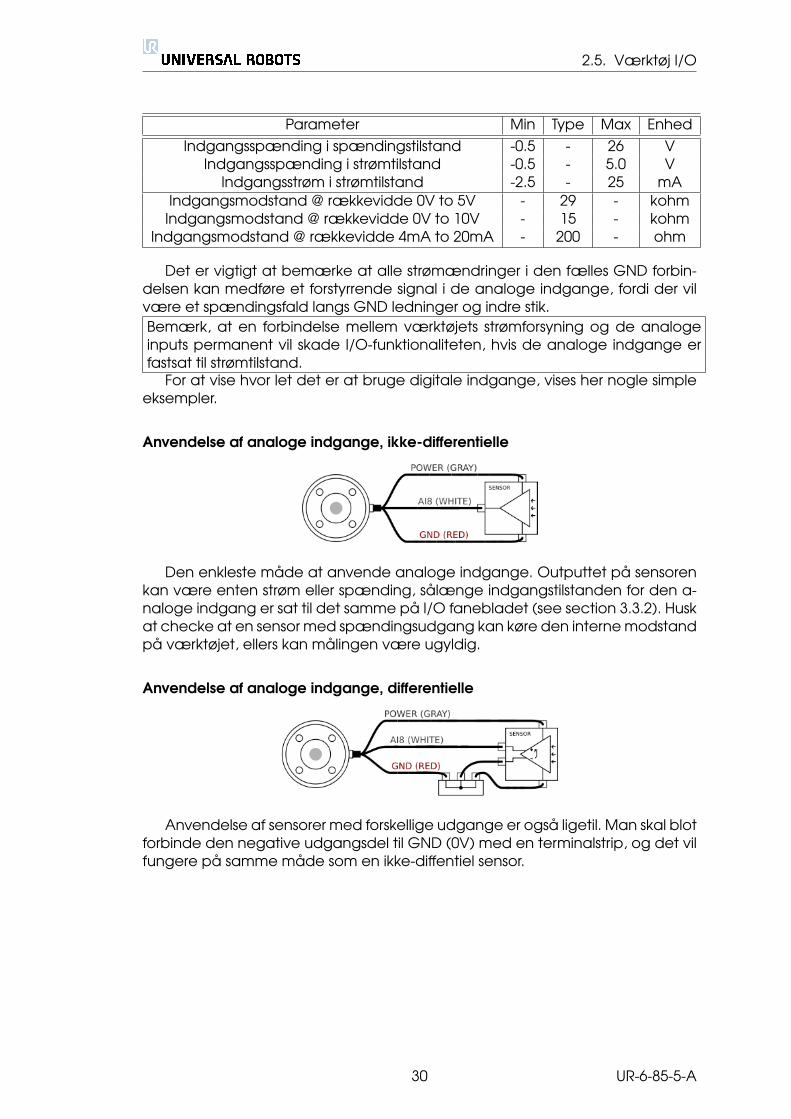
Parameter Min Type Max EnhedIndgangsspænding i spændingstilstand -0.5 - 26 V
Indgangsspænding i strømtilstand -0.5 - 5.0 VIndgangsstrøm i strømtilstand -2.5 - 25 mA
Indgangsmodstand @ rækkevidde 0V to 5V - 29 - kohmIndgangsmodstand @ rækkevidde 0V to 10V - 15 - kohm
Indgangsmodstand @ rækkevidde 4mA to 20mA - 200 - ohm
Det er vigtigt at bemærke at alle strømændringer i den fælles GND forbin-delsen kan medføre et forstyrrende signal i de analoge indgange, fordi der vilvære et spændingsfald langs GND ledninger og indre stik.Bemærk, at en forbindelse mellem værktøjets strømforsyning og de analogeinputs permanent vil skade I/O-funktionaliteten, hvis de analoge indgange erfastsat til strømtilstand.
For at vise hvor let det er at bruge digitale indgange, vises her nogle simpleeksempler.
Anvendelse af analoge indgange, ikke-differentielle
Den enkleste made at anvende analoge indgange. Outputtet pa sensorenkan være enten strøm eller spænding, salænge indgangstilstanden for den a-naloge indgang er sat til det samme pa I/O fanebladet (see section 3.3.2). Huskat checke at en sensor med spændingsudgang kan køre den interne modstandpa værktøjet, ellers kan malingen være ugyldig.
Anvendelse af analoge indgange, differentielle
Anvendelse af sensorer med forskellige udgange er ogsa ligetil. Man skal blotforbinde den negative udgangsdel til GND (0V) med en terminalstrip, og det vilfungere pa samme made som en ikke-diffentiel sensor.
30 UR-6-85-5-A
Kapitel 3
PolyScope Software
31

3.1. Indledning
3.1 Indledning
PolyScope er den grafiske brugergrænseflade (GUI) som du kan betjene robot-ten med, køre eksisterende robotprogrammer eller nemt lave nye programmermed. PolyScope kører pa den trykfølsomme skærm, der er forbundet med con-trollerskabet. Hvordan du kalibrerer skærmen, kan du læse i afsnit 3.5.6.
Billedet ovenfor viser velkomstskærmen. De blalige omrader pa skærmener knapper du kan trykke pa med en finger eller med bagenden af en pen.PolyScope har en hierakisk skærmstruktur. I programomradet, er skærmene ar-rangeret i faneblade, for nem adgang pa skærmbillederne.
I dette eksempel, er Program fanen pa øverste niveau valgt, og herunder erStruktur fanebladet valgt. Program fanebladet indeholder information relate-ret til det aktuelt indlæste program. Hvis Move fanebladet vælges, skifter skær-men til ’Move’ skærmen, hvorfra robotten kan flyttes. Pa samme made kan du,ved at vælge I/O fanebladet, se og ændre tilstanden for elektriske I/O.
Det er muligt at forbinde en mus og et keyboard til controllerskabet, men deter ikke nødvendigt. Hver gang der er brug for tekst eller tal, kommer et tastaturtil syne pa skærmen.
Tastaturet og udtryksredigeringen kan findes ved hjælp af knapperne vist oven-for.
PolyScope forskellige skærmbilleder vises i de følgende afsnit.
32 UR-6-85-5-A

3.1. Indledning
3.1.1 Velkomstskærm
Nar controller-PCen startes, vises velkomstskærmen. Skærmen giver følgendemuligheder:
• Kør program: Vælg et program der skal køre. Dette er den enkleste madeat betjene robotten, men kræver et passende program, der allerede erlavet.
• Programmer Robot: Skift program, eller lav et nyt program.
• Setup: Opret passwords, opgrader software via Internettet, anmod om sup-port, kalibrer trykskærmen, etc.
• Luk robotten ned: Lukker controller-PCen og slukker for robotten.
33 UR-6-85-5-A

3.1. Indledning
3.1.2 Initialiseringsskærm
Pa denne skærm kontrollerer du robottens initialisering. Nar den er tændt,skal robotten finde positionerne for hvert led. For at finde ledpositionerne, skalrobotten bevæge hvert led.
Status LED-lys
Status for LED-lys viser driftsstatus af leddene.
• Rød lysende LED indikerer at robotten i øjeblikket er stoppet, hvilket kanhave flere arsager.
• Gul lysende LED indikerer at leddet kører, men ikke kender sin nuværendeposition, og behøver et mal.
• Og grøn lysende LED indikerer at leddet kører korrekt og er klar til at udføre.
Alle LED skal være grønne for at robotten kan fungere normalt.subsubsectionManuel bevægelse (handstyret) Nar leddene er klar og “Fri-
giv” knappen bag pa skærmen holdes inde, ændres leddenes modus til Backdrive.I denne modus, vil leddene frigive bremserne, nar der registreres bevægelse. Padenne made kan robotten flyttes rundt manuelt, før den startes. Bremserne re-aktiveres, sa snart knappen slippes.
Auto bevægelse (Auto knapper)
I regelen er det altid tilradeligt at bruge auto-knapperne til at flytte de enkelteled, indtil de nar en kendt tilstand. For at kunne betjene knappen , skal du trykkepa Auto-knappen og holde den nede.
Auto-knapperne kan bruges individuelt for hvert led, eller for hele robot-ten. Man bør udvise stor forsigtighed hvis robotten rører ved en forhindring, dapakørsel pa en hindring kan forarsage skade pa en led-gearkasse.
34 UR-6-85-5-A
3.2. Skærmredigering
Direkte bevægelse (Move knapper)
I tilfælde hvor der er stor risiko for at en ukontrolleret bevægelse af et led vil kun-ne forarsage skade pa robotten eller dens omgivelser, kan operatøren vælgeat styre robotten til udgangspositionen, manuelt for hvert led. section ??.
3.2 Skærmredigering
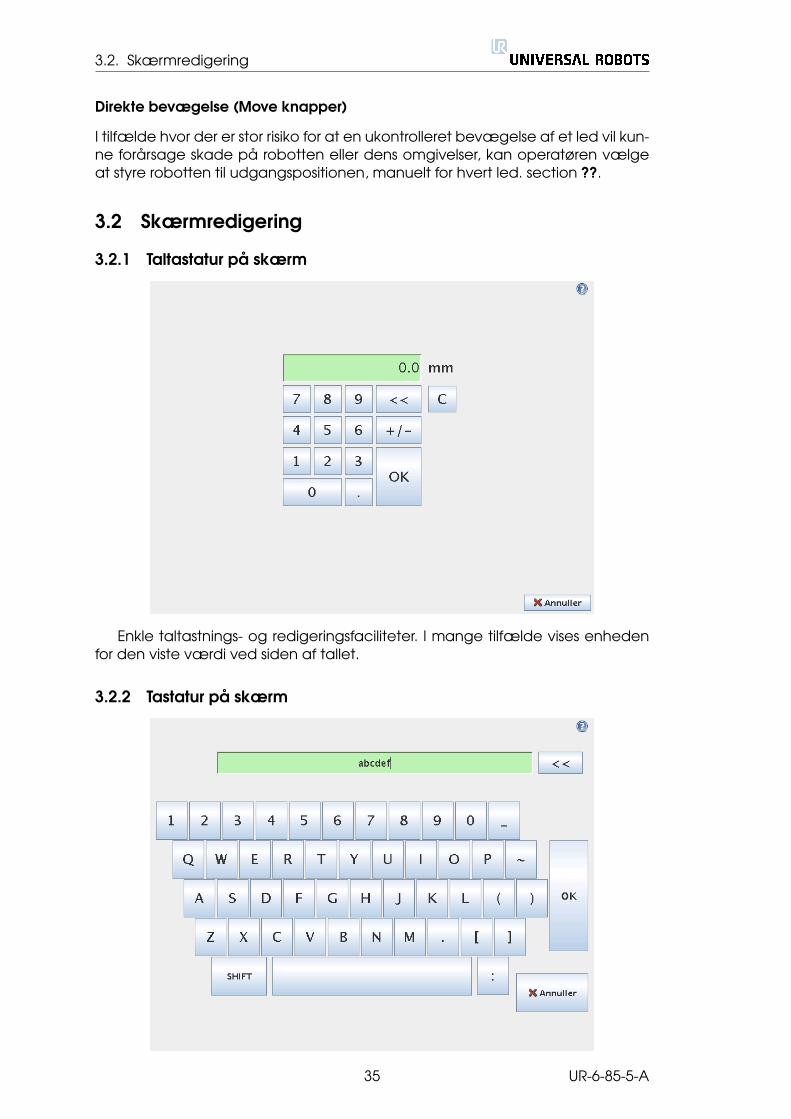
3.2.1 Taltastatur pa skærm
Enkle taltastnings- og redigeringsfaciliteter. I mange tilfælde vises enhedenfor den viste værdi ved siden af tallet.
3.2.2 Tastatur pa skærm
35 UR-6-85-5-A
3.3. Robotstyring
Enkle tekstskrivnings- og redigeringsfaciliteter. Skift tasten kan bruges til atfa nogle ekstra specialtegn.
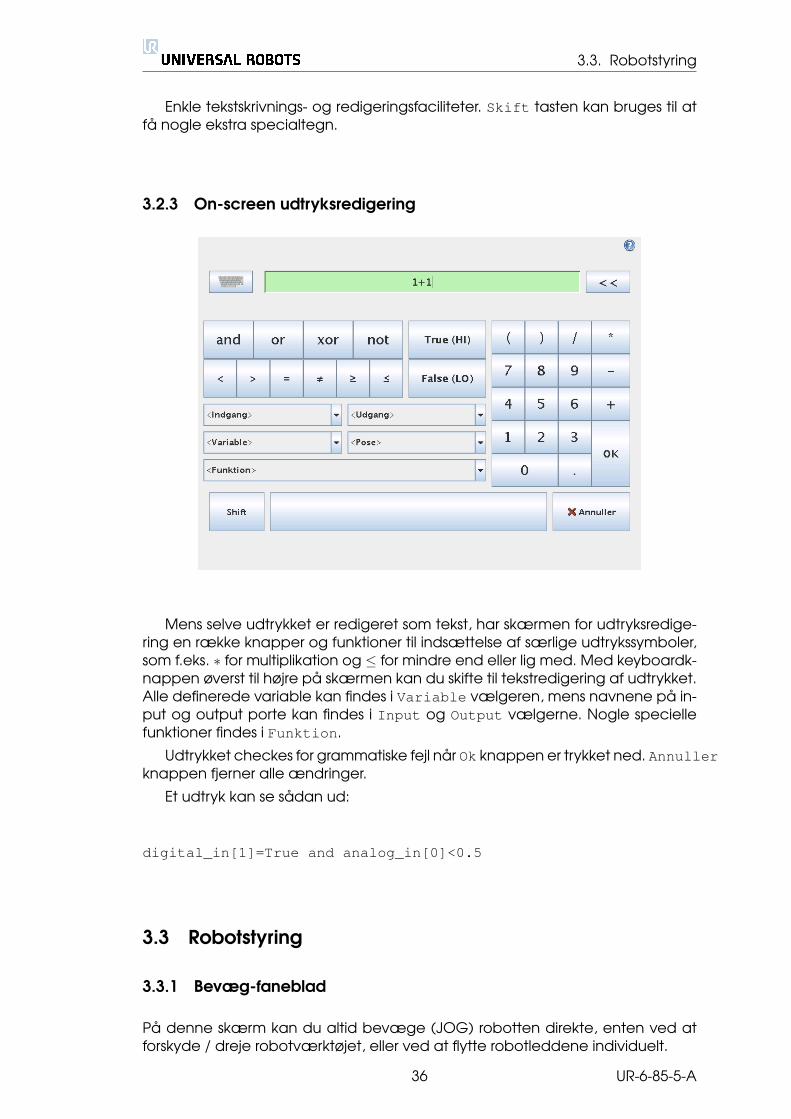
3.2.3 On-screen udtryksredigering
Mens selve udtrykket er redigeret som tekst, har skærmen for udtryksredige-ring en række knapper og funktioner til indsættelse af særlige udtrykssymboler,som f.eks. ∗ for multiplikation og ≤ for mindre end eller lig med. Med keyboardk-nappen øverst til højre pa skærmen kan du skifte til tekstredigering af udtrykket.Alle definerede variable kan findes i Variable vælgeren, mens navnene pa in-put og output porte kan findes i Input og Output vælgerne. Nogle speciellefunktioner findes i Funktion.
Udtrykket checkes for grammatiske fejl nar Ok knappen er trykket ned. Annullerknappen fjerner alle ændringer.
Et udtryk kan se sadan ud:
digital_in[1]=True and analog_in[0]<0.5
3.3 Robotstyring
3.3.1 Bevæg-faneblad
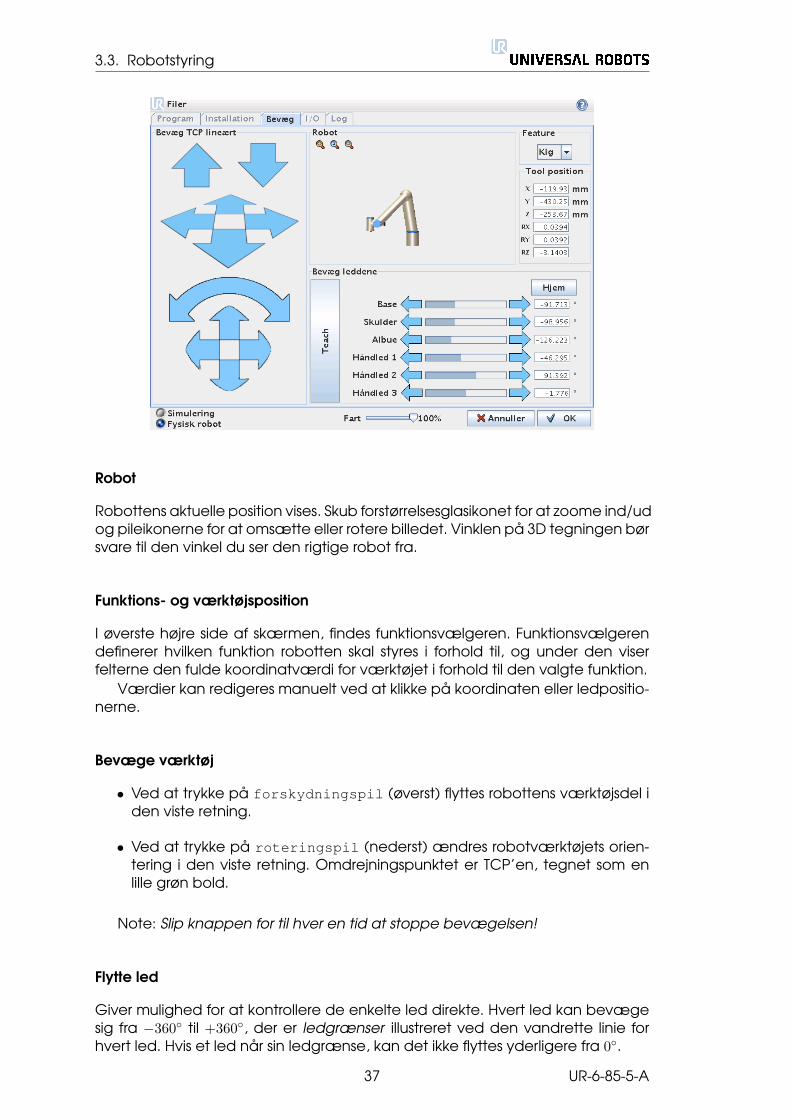
Pa denne skærm kan du altid bevæge (JOG) robotten direkte, enten ved atforskyde / dreje robotværktøjet, eller ved at flytte robotleddene individuelt.
36 UR-6-85-5-A
3.3. Robotstyring
Robot
Robottens aktuelle position vises. Skub forstørrelsesglasikonet for at zoome ind/udog pileikonerne for at omsætte eller rotere billedet. Vinklen pa 3D tegningen børsvare til den vinkel du ser den rigtige robot fra.
Funktions- og værktøjsposition
I øverste højre side af skærmen, findes funktionsvælgeren. Funktionsvælgerendefinerer hvilken funktion robotten skal styres i forhold til, og under den viserfelterne den fulde koordinatværdi for værktøjet i forhold til den valgte funktion.
Værdier kan redigeres manuelt ved at klikke pa koordinaten eller ledpositio-nerne.
Bevæge værktøj
• Ved at trykke pa forskydningspil (øverst) flyttes robottens værktøjsdel iden viste retning.
• Ved at trykke pa roteringspil (nederst) ændres robotværktøjets orien-tering i den viste retning. Omdrejningspunktet er TCP’en, tegnet som enlille grøn bold.
Note: Slip knappen for til hver en tid at stoppe bevægelsen!
Flytte led
Giver mulighed for at kontrollere de enkelte led direkte. Hvert led kan bevægesig fra −360◦ til +360◦, der er ledgrænser illustreret ved den vandrette linie forhvert led. Hvis et led nar sin ledgrænse, kan det ikke flyttes yderligere fra 0◦.
37 UR-6-85-5-A

3.3. Robotstyring
Teach
Nar ’Teach’ knappen holdes nede, er det muligt fysisk at tage fat i robottenog trække den derhen hvor man vil have den. Hvis tyngdekraftindstillingerne(see 3.3.7) i Setup fanebladet er forkert eller robotten bærer en tung belast-ning, kan robotten begynde at bevæge sig(faldende) nar ’Teach’ knappen ertrykket ned. Hvis det er tilfældet, sa bare slip ’Teach’ knappen igen.
3.3.2 I/O Faneblad
Pa denne skærm kan du altid se og indstille I/O signalerne fra/til robotten.Skærmen viser den aktuelle tilstand for I/O, og I/O under programafviklingen.Hvis noget ændres under programafviklingen, stopper programmet. Ved pro-gramstop, vil alle outputsignaler bevare deres tilstand. Skærmen er kun opda-teret til 10Hz, sa et meget hurtigt signal vil muligvis ikke kunne vises ordentligt.
Signalernes electriske detaljer er beskrevet i afsnit 2.
Indstilling af analogt omrade Det analoge output kan indstilles til enten detnuværende [4-20mA] eller til [0-10V] spændingsoutput. De analoge inputinter-valler kan tilpasses fra [-10-10V] til [0-5V]. Indstillingerne huskes for en eventuelsenere genstart af robotcontrolleren, nar et program gemmes.
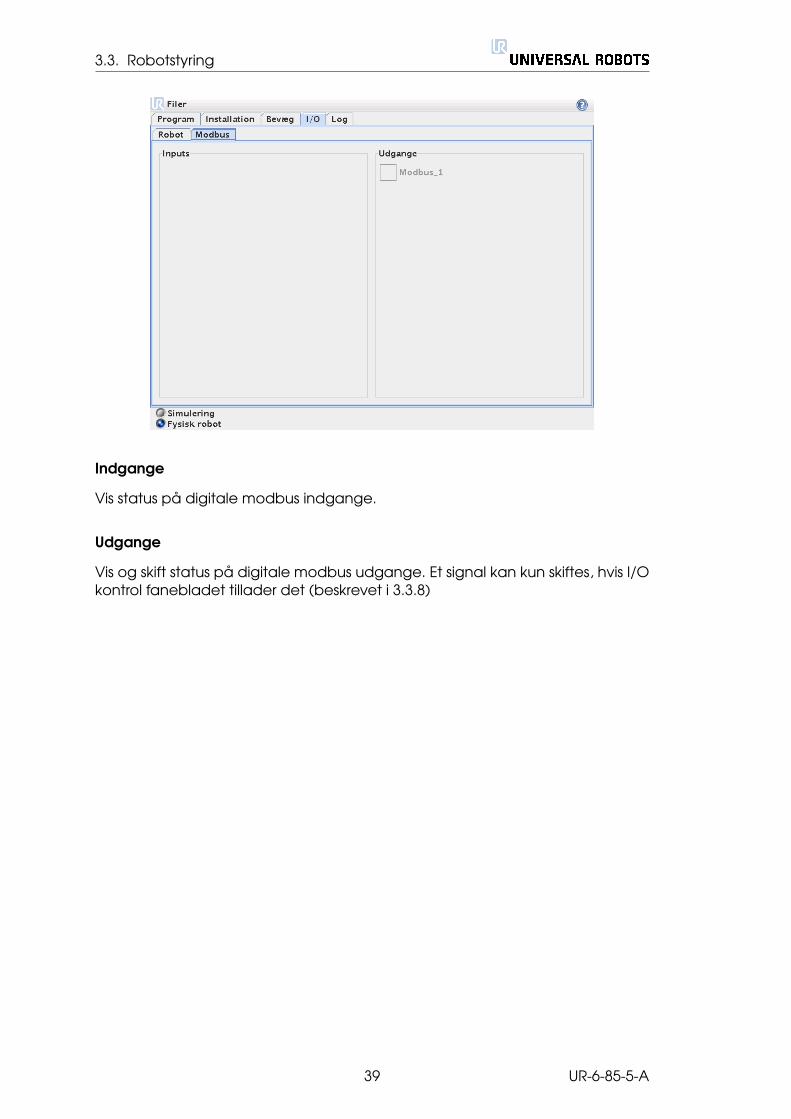
3.3.3 Modbus I/O
Her vises de digitale Modbus I / O signaler, som er oprettet i installationen. Hvissignalforbindelsen er tabt, er det tilsvarende punkt pa denne skærm deaktive-ret.
38 UR-6-85-5-A
3.3. Robotstyring
Indgange
Vis status pa digitale modbus indgange.
Udgange
Vis og skift status pa digitale modbus udgange. Et signal kan kun skiftes, hvis I/Okontrol fanebladet tillader det (beskrevet i 3.3.8)
39 UR-6-85-5-A
3.3. Robotstyring
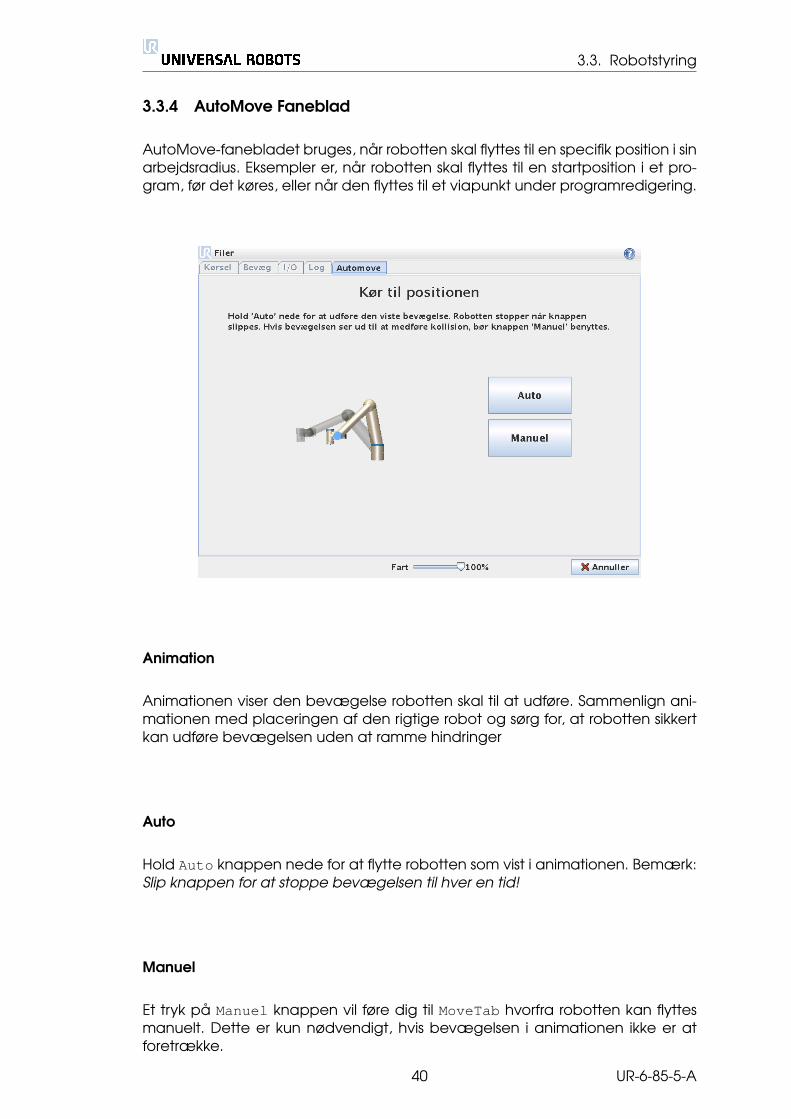
3.3.4 AutoMove Faneblad
AutoMove-fanebladet bruges, nar robotten skal flyttes til en specifik position i sinarbejdsradius. Eksempler er, nar robotten skal flyttes til en startposition i et pro-gram, før det køres, eller nar den flyttes til et viapunkt under programredigering.
Animation
Animationen viser den bevægelse robotten skal til at udføre. Sammenlign ani-mationen med placeringen af den rigtige robot og sørg for, at robotten sikkertkan udføre bevægelsen uden at ramme hindringer
Auto
Hold Auto knappen nede for at flytte robotten som vist i animationen. Bemærk:Slip knappen for at stoppe bevægelsen til hver en tid!
Manuel
Et tryk pa Manuel knappen vil føre dig til MoveTab hvorfra robotten kan flyttesmanuelt. Dette er kun nødvendigt, hvis bevægelsen i animationen ikke er atforetrække.
40 UR-6-85-5-A
3.3. Robotstyring
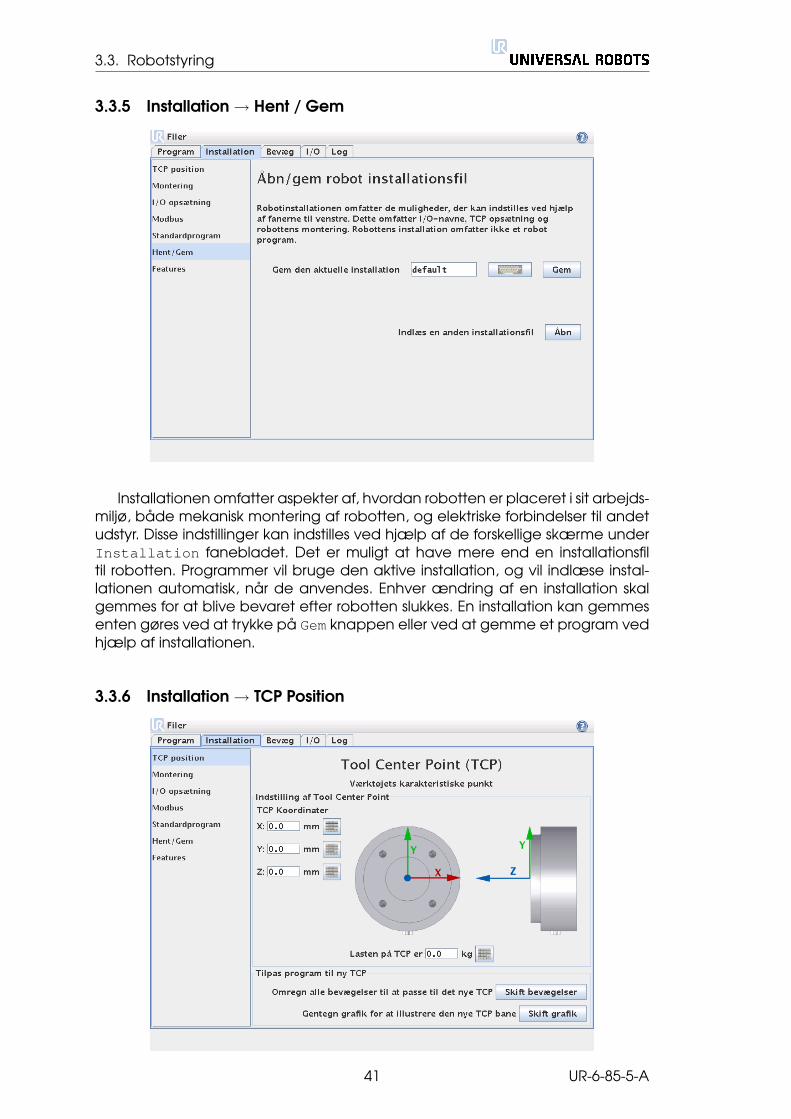
3.3.5 Installation→ Hent / Gem
Installationen omfatter aspekter af, hvordan robotten er placeret i sit arbejds-miljø, bade mekanisk montering af robotten, og elektriske forbindelser til andetudstyr. Disse indstillinger kan indstilles ved hjælp af de forskellige skærme underInstallation fanebladet. Det er muligt at have mere end en installationsfiltil robotten. Programmer vil bruge den aktive installation, og vil indlæse instal-lationen automatisk, nar de anvendes. Enhver ændring af en installation skalgemmes for at blive bevaret efter robotten slukkes. En installation kan gemmesenten gøres ved at trykke pa Gem knappen eller ved at gemme et program vedhjælp af installationen.
3.3.6 Installation→ TCP Position
41 UR-6-85-5-A
3.3. Robotstyring
Tool Center Point (TCP) er robotværktøjets karakteristiske punkt. Nar robottenbevæger sig lineært, er det dette punkt, der bevæger sig i en lige linje. Det erogsa TCPens bevægelse, der vises under fanen Grafik. TCPen er givet i forholdtil centrum for værktøjsoutputflangen, som angivet pa skærmens grafik.
De to knapper i bunden af skærmen er relevante, nar TCP ændres.
• Skift bevægelser genberegner alle positioner i robotprogrammet, sa depasser til ny TCP. Dette er relevant nar formen eller størrelsen pa værktøjerneer blevet ændret.
• Skift grafik gentegner programmets grafik, sa det passer til ny TCP. Dette errelevant nar TCP er ændret, uden nogen fysisk ændring af værktøjet.
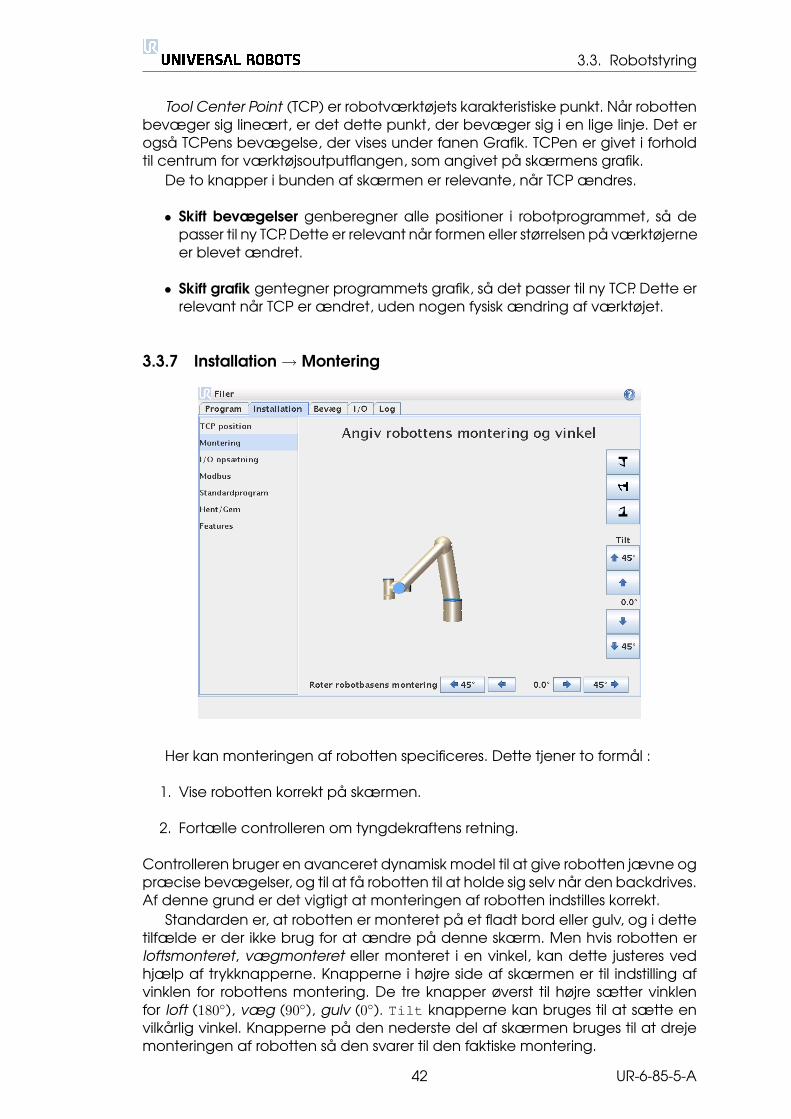
3.3.7 Installation→ Montering
Her kan monteringen af robotten specificeres. Dette tjener to formal :
1. Vise robotten korrekt pa skærmen.
2. Fortælle controlleren om tyngdekraftens retning.
Controlleren bruger en avanceret dynamisk model til at give robotten jævne ogpræcise bevægelser, og til at fa robotten til at holde sig selv nar den backdrives.Af denne grund er det vigtigt at monteringen af robotten indstilles korrekt.
Standarden er, at robotten er monteret pa et fladt bord eller gulv, og i dettetilfælde er der ikke brug for at ændre pa denne skærm. Men hvis robotten erloftsmonteret, vægmonteret eller monteret i en vinkel, kan dette justeres vedhjælp af trykknapperne. Knapperne i højre side af skærmen er til indstilling afvinklen for robottens montering. De tre knapper øverst til højre sætter vinklenfor loft (180◦), væg (90◦), gulv (0◦). Tilt knapperne kan bruges til at sætte envilkarlig vinkel. Knapperne pa den nederste del af skærmen bruges til at drejemonteringen af robotten sa den svarer til den faktiske montering.
42 UR-6-85-5-A

3.3. Robotstyring
3.3.8 Installation→ I/O Opsætning
Input og output signaler kan navngives. Det kan gøre det lettere at huskehvad signalet gør, nar man arbejder med robotten. Vælg et I/O ved at klikkepa det, og angiv navnet ved hjælp af tastaturet pa skærmen. Du kan sættenavnet tilbage med kun blanke tegn.
Nar et digitalt output er valgt, er afkrydsningsfeltet i bunden af skærmen ak-tiveret. Dette felt styrer om udgangssignalet skal bevares ved programstop,ellerom det skal sættes til lavt ved programstop. Dette kan være nyttigt, for at for-tælle maskiner der fodrer robotten, at programmet er stoppet.
Nar et output er valgt, aktiveres et par muligheder. Ved hjælp af afkryds-ningsfeltet, kan standardværdien for udgangen sættes til enten lav eller høj.Det betyder at udgangen sættes til denne værdi nar et program ikke kører. H-vis der ikke markeres i feltet, bevarer udgangen sin nuværende status efter at etprogram slutter. Det er ogsa muligt at angive om en udgang skal kunne styres fraI/O fanebladet (af entem programmør, eller bade af opratør og programmør)eller om det kun er robotprogrammmer der ma ændre i udgangsværdien.
43 UR-6-85-5-A
3.3. Robotstyring
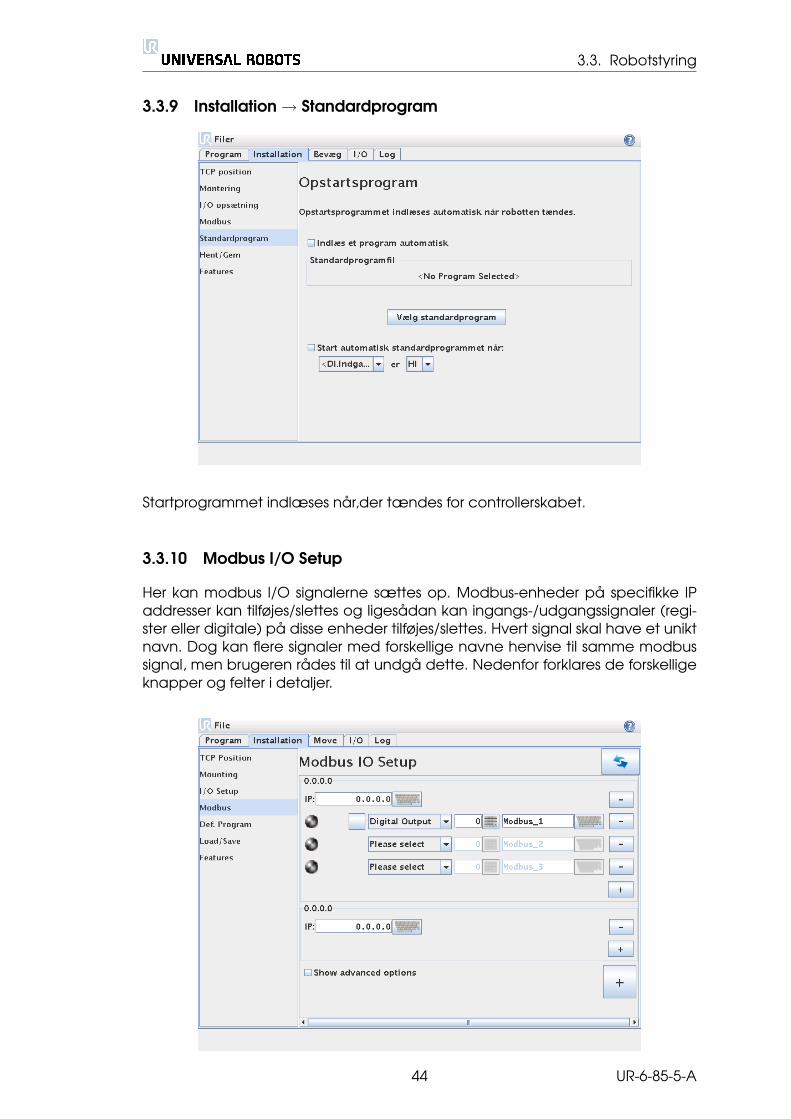
3.3.9 Installation→ Standardprogram
Startprogrammet indlæses nar,der tændes for controllerskabet.
3.3.10 Modbus I/O Setup
Her kan modbus I/O signalerne sættes op. Modbus-enheder pa specifikke IPaddresser kan tilføjes/slettes og ligesadan kan ingangs-/udgangssignaler (regi-ster eller digitale) pa disse enheder tilføjes/slettes. Hvert signal skal have et uniktnavn. Dog kan flere signaler med forskellige navne henvise til samme modbussignal, men brugeren rades til at undga dette. Nedenfor forklares de forskelligeknapper og felter i detaljer.
44 UR-6-85-5-A

3.3. Robotstyring
Opdater
Tryk pa denne knap for at opdatere forbindelsesstatus for alle modbus signaler iden aktuelle installation.
Tilføj enhed
Tryk pa denne knap for at tilføje en ny modbus enhed til denne robot installation.
Slet enhed
Tryk pa denne knap for at slette modbus enheden og alle signaler føjet til denneenhed.
Sæt IP enhed
Her vises IP adressen for modbus enheden. Tryk pa knappen for at ændre den.
Tilføj signal
Tryk pa denne knap for at tilføje et signal til robot installationen som findes patilsvarende modbus enhed.
Slet signal
Tryk pa denne knap for at slette modbus signalet fra installationen.
Sæt signal type
Brug denne drop down menu til at vælge signal typen. Tilgængelige typer er:
• Digital indgang: En digital indgang er en one-bit mængde, som læses framodbus enheden pa spolen angivet i signalets adressefelt.
• Digital udgang:En digital udgang er en one-bit mængde, der kan indstillestil enten høj eller lav i henhold til konfigurationen af den tilsvarende Modbusterminal. Indtil værdien af denne udgang er blevet sat af brugeren, læsesværdien fra enheden.
• Register indgang: En register indgang er en 16-bit mængde, der læses fraadressen i adressefeltet.
• Register udgang: En register udgang er en 16-bit mængde, der kan indstil-les af brugeren. Indtil værdien af registret er blevet indstillet, læses værdienaf det simpelthen.
45 UR-6-85-5-A
3.3. Robotstyring
Sæt signal adresse
Dette felt viser signaladressen. Brug tastaturet pa skærmen for at vælge enanden adresse. Gyldige adresser afhænger af producent og konfiguration afModbus enheden. Det er nødvendigt at have en god forstaelse af den inter-ne hukommelsekort for Modbus controlleren for at sikre at signaladressen faktisksvarer til, hvad der er hensigten med signalet. Især kan det være værd at kon-trollere betydningen af en signaladresse, nar forskellige funktionskoder anven-des. Se 3.3.10 for en beskrivelse af funktionskoderne forbundet med de forskelli-ge signaltyper.
Sæt signal navn
Med tastaturet pa skærmen, kan brugeren give et signal et meningsfuldt navn,som vil give en mere intuitiv programmering af robotten ved hjælp af signalet.Signal navne er unikke, hvilket betyder, at to signaler ikke kan tildeles det sammenavn. Signal navne er begrænset til besta af højst 10 tegn.
Signal værdi
Her vises den aktuelle værdi af signalet. For register signaler, udtrykkes værdi-en som en usigneret heltal. Til udgangssignaler, kan den ønskede signalværdiindstilles ved hjælp af knappen. Igen, for en register udgang, skal værdien, derskrives til enheden, være et usigneret heltal.
Signalforbindelsestatus
Denne ikon viser om signalet kan læses/skrives korrekt (grøn) eller om enhedenreagerer uventet eller ikke er tilgængelig (gra).
Vis Avancerede Muligheder
Dette afkrydsningsfelt viser/skjuler de avancerede muligheder for hvert signal.
Avancerede Muligheder
• Opdateringsfrekvens: Denne menu kan anvendes til at ændre opdate-ringsfrekvensen pa signalet. Det vil sige frekvensen hvormed forespørgslersendes til Modbus controlleren for enten at læse eller skrive signalværdien.
• Slave Address: Dette tekstfelt kan bruges til at angive en specifik slaveadresse til froespørgsler svarende til et specifikt signal. Værdien skal væ-re i intervallet 0-255 begge inklusive, og standard er 255. Hvis man ændrerdenne værdi, anbefales det at konsultere manualen for Modbus-enhedernefor at kontrollere deresfunktionalitet med en ændret slave adresse.
46 UR-6-85-5-A
3.3. Robotstyring
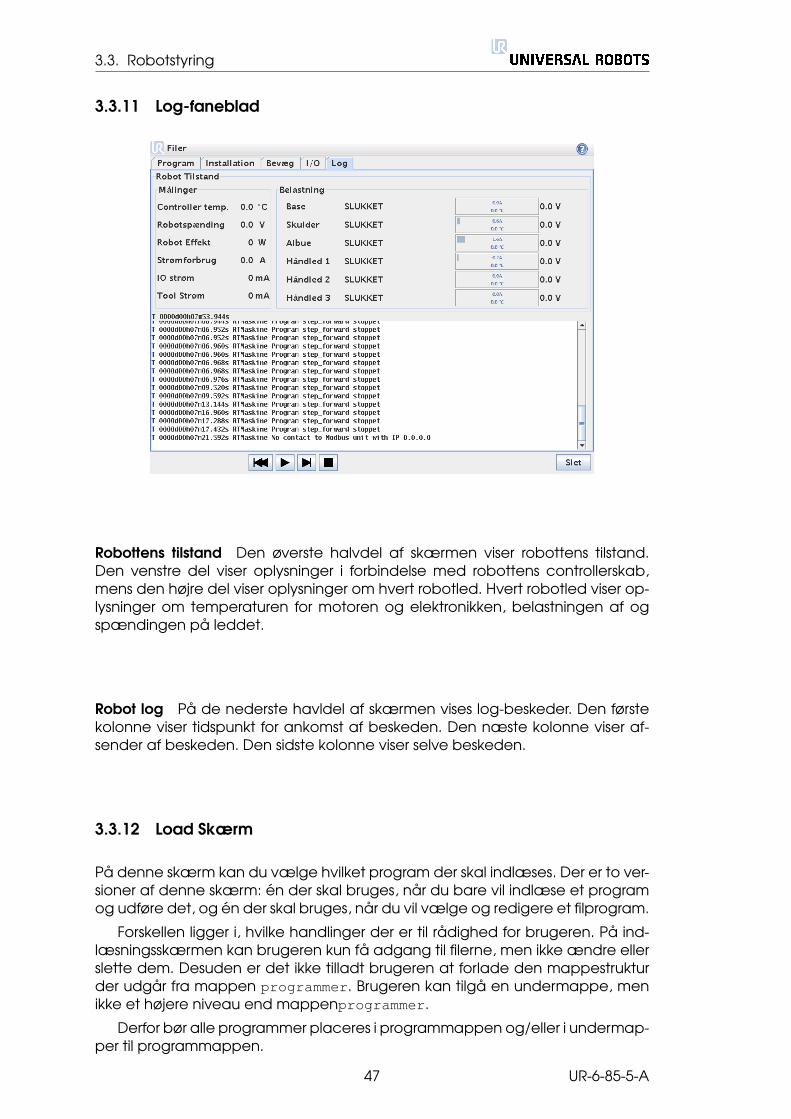
3.3.11 Log-faneblad
Robottens tilstand Den øverste halvdel af skærmen viser robottens tilstand.Den venstre del viser oplysninger i forbindelse med robottens controllerskab,mens den højre del viser oplysninger om hvert robotled. Hvert robotled viser op-lysninger om temperaturen for motoren og elektronikken, belastningen af ogspændingen pa leddet.
Robot log Pa de nederste havldel af skærmen vises log-beskeder. Den førstekolonne viser tidspunkt for ankomst af beskeden. Den næste kolonne viser af-sender af beskeden. Den sidste kolonne viser selve beskeden.
3.3.12 Load Skærm
Pa denne skærm kan du vælge hvilket program der skal indlæses. Der er to ver-sioner af denne skærm: en der skal bruges, nar du bare vil indlæse et programog udføre det, og en der skal bruges, nar du vil vælge og redigere et filprogram.
Forskellen ligger i, hvilke handlinger der er til radighed for brugeren. Pa ind-læsningsskærmen kan brugeren kun fa adgang til filerne, men ikke ændre ellerslette dem. Desuden er det ikke tilladt brugeren at forlade den mappestrukturder udgar fra mappen programmer. Brugeren kan tilga en undermappe, menikke et højere niveau end mappenprogrammer.
Derfor bør alle programmer placeres i programmappen og/eller i undermap-per til programmappen.
47 UR-6-85-5-A
3.3. Robotstyring
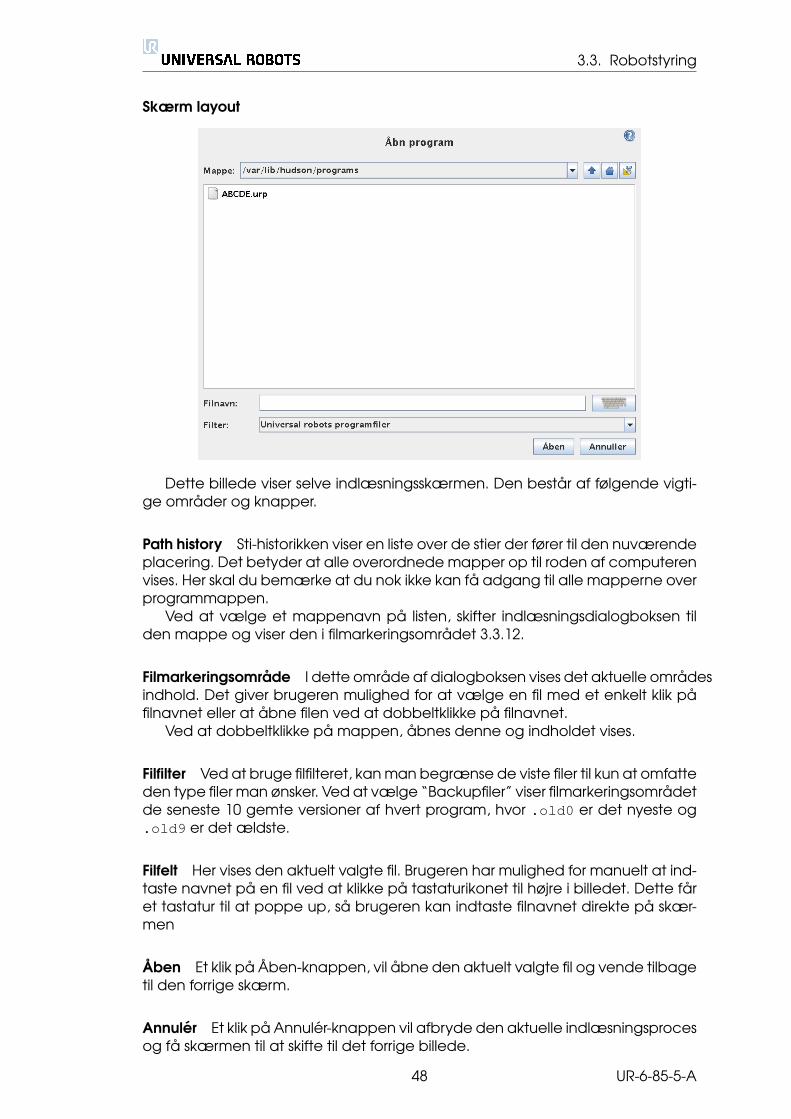
Skærm layout
Dette billede viser selve indlæsningsskærmen. Den bestar af følgende vigti-ge omrader og knapper.
Path history Sti-historikken viser en liste over de stier der fører til den nuværendeplacering. Det betyder at alle overordnede mapper op til roden af computerenvises. Her skal du bemærke at du nok ikke kan fa adgang til alle mapperne overprogrammappen.
Ved at vælge et mappenavn pa listen, skifter indlæsningsdialogboksen tilden mappe og viser den i filmarkeringsomradet 3.3.12.
Filmarkeringsomrade I dette omrade af dialogboksen vises det aktuelle omradesindhold. Det giver brugeren mulighed for at vælge en fil med et enkelt klik pafilnavnet eller at abne filen ved at dobbeltklikke pa filnavnet.
Ved at dobbeltklikke pa mappen, abnes denne og indholdet vises.
Filfilter Ved at bruge filfilteret, kan man begrænse de viste filer til kun at omfatteden type filer man ønsker. Ved at vælge “Backupfiler” viser filmarkeringsomradetde seneste 10 gemte versioner af hvert program, hvor .old0 er det nyeste og.old9 er det ældste.
Filfelt Her vises den aktuelt valgte fil. Brugeren har mulighed for manuelt at ind-taste navnet pa en fil ved at klikke pa tastaturikonet til højre i billedet. Dette faret tastatur til at poppe up, sa brugeren kan indtaste filnavnet direkte pa skær-men
Aben Et klik pa Aben-knappen, vil abne den aktuelt valgte fil og vende tilbagetil den forrige skærm.
Annuler Et klik pa Annuler-knappen vil afbryde den aktuelle indlæsningsprocesog fa skærmen til at skifte til det forrige billede.
48 UR-6-85-5-A

3.4. Programmering
Udfør-knapper En række knapper giver brugeren mulighed for at udføre nogleaf de handlinger, der normalt ville være tilgængelig ved at højreklikke pa etfilnavn. Hertil kommer muligheden for at ga opad i mappestrukturen og direktetil programmappen.
• Pil op: Ga opad i mappestrukturen. Knappen vil ikke blive aktiveret i totilfælde: nar den aktuelle mappe er den øverste eller hvis skærmen er ibegrænset tilstand og den aktuelle mappe er programmappen.
• Ga til programfolder: Ga til hjem
• Aktioner: Aktioner sasom at oprette mapper, slette filer osv.
3.3.13 Kørsel-faneblad
Dette faneblad giver mulighed for en meget enkel made at betjene robot-ten pa, med sa fa knapper og indstillinger som muligt. Dette kan være nyttigtkombineret med passwordbeskyttelse af programmeringsdelen af PolyScope(se afsnit 3.5.5), for at gøre robotten til et værktøj der udelukkende kan køreforprogrammerede programmer.
3.4 Programmering
49 UR-6-85-5-A
3.4. Programmering
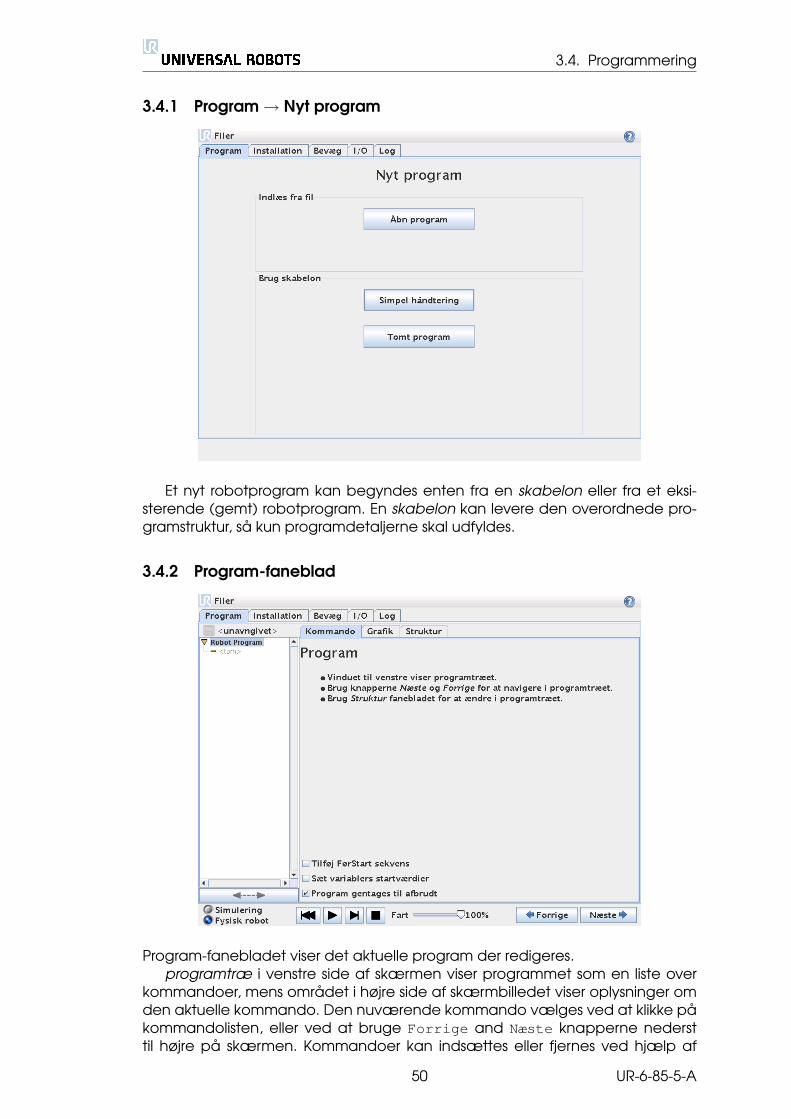
3.4.1 Program→ Nyt program
Et nyt robotprogram kan begyndes enten fra en skabelon eller fra et eksi-sterende (gemt) robotprogram. En skabelon kan levere den overordnede pro-gramstruktur, sa kun programdetaljerne skal udfyldes.
3.4.2 Program-faneblad
Program-fanebladet viser det aktuelle program der redigeres.programtræ i venstre side af skærmen viser programmet som en liste over
kommandoer, mens omradet i højre side af skærmbilledet viser oplysninger omden aktuelle kommando. Den nuværende kommando vælges ved at klikke pakommandolisten, eller ved at bruge Forrige and Næste knapperne nedersttil højre pa skærmen. Kommandoer kan indsættes eller fjernes ved hjælp af
50 UR-6-85-5-A
3.4. Programmering
Struktur fanebladet, der er beskrevet i afsnit 3.4.27. Programnavnet vises di-rekte over kommandolisten, med et lille disk-ikon, der kan klikkes pa for hurtigt atgemme programmet.
Den nederste del af skærmen er et Instrumentbræt. Instrumentbræt inde-holder et sæt knapper svarende til en gammeldags bandoptager, hvorfra pro-grammer kan startes og stoppes, single-intensiveres og genstartes. speed slidergiver dig mulighed for, til hver en tid, at justere programhastigheden, som di-rekte pavirker den hastighed robotten bevæger sig med. Til venstre for Instru-mentbræt kan du skifte mellem at køre programmet i en simulering, eller køredet pa den virkelige robot med Simulation og Real Robot knapperne. Nardu kører en simulering, er robotten ikke i bevægelse og kan dermed ikke skadesig selv eller kollidere med andet udstyr i nærheden. Brug simulation til at testeprogrammer, hvis der er usikkerhed om, hvordan robotten vil gøre.
Mens programmet skrives, illustreres robottens resulterende bevægelse vedhjælp af en 3D-tegning pa Grafik fanebladet, der er beskrevet i afsnit 3.4.26.
Ud for hver programkommando er et lille ikon, som er enten rødt, gult ellergrønt. Et rødt ikon betyder, at der er en fejl i denne kommando, gult betyder, atkommandoen ikke er færdig, og grønt betyder, at alt er OK. Et program kan kunkøres nar alle kommandoer er grønne.
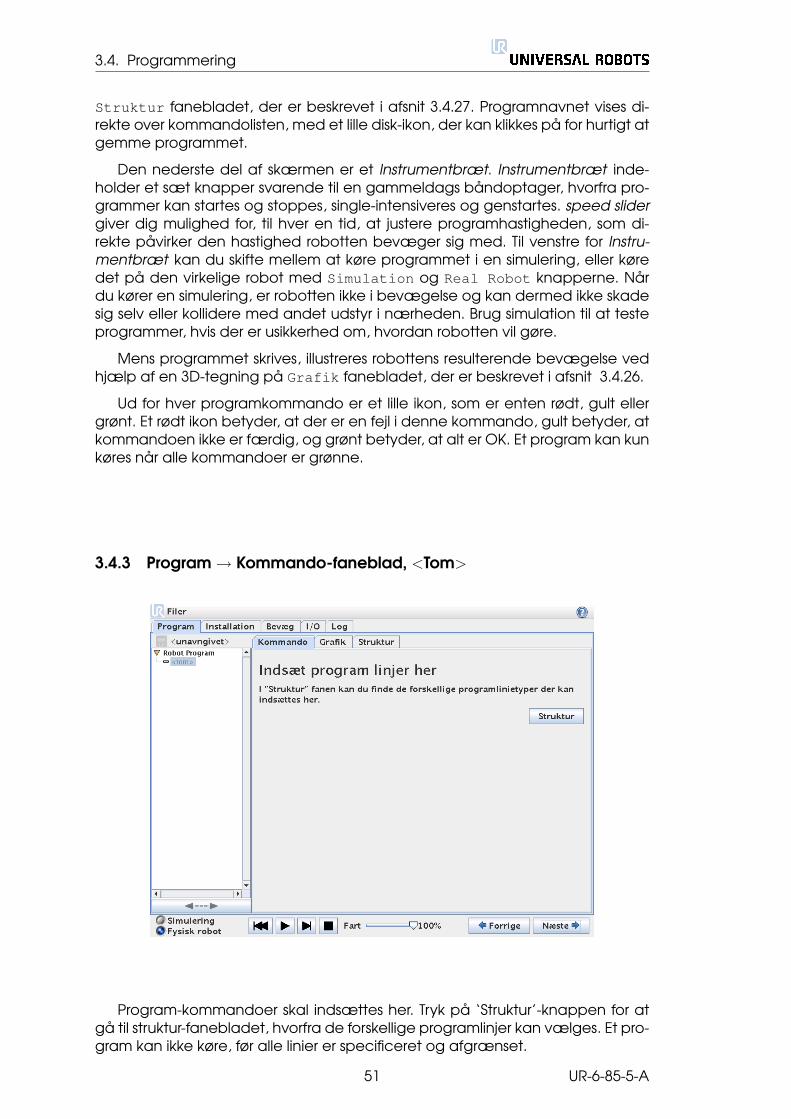
3.4.3 Program→ Kommando-faneblad, <Tom>
Program-kommandoer skal indsættes her. Tryk pa ‘Struktur’-knappen for atga til struktur-fanebladet, hvorfra de forskellige programlinjer kan vælges. Et pro-gram kan ikke køre, før alle linier er specificeret og afgrænset.
51 UR-6-85-5-A
3.4. Programmering
Time
Speed
Acceleration
Cruise
Deceleration
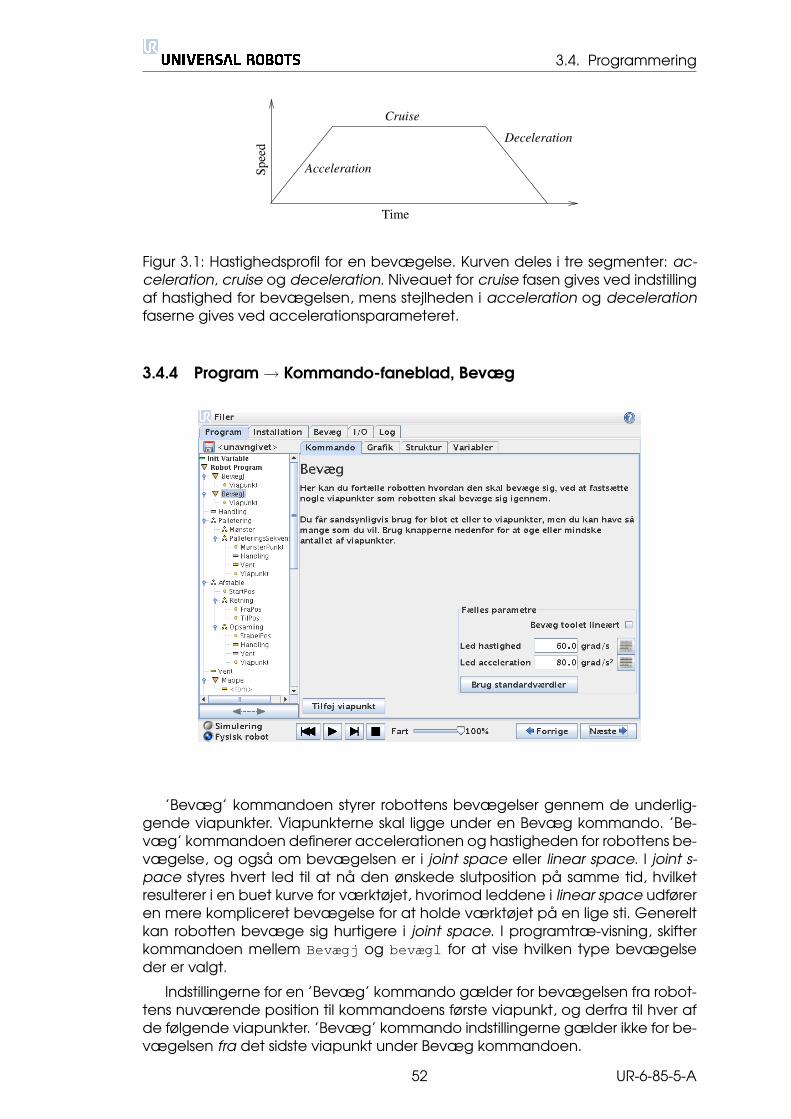
Figur 3.1: Hastighedsprofil for en bevægelse. Kurven deles i tre segmenter: ac-celeration, cruise og deceleration. Niveauet for cruise fasen gives ved indstillingaf hastighed for bevægelsen, mens stejlheden i acceleration og decelerationfaserne gives ved accelerationsparameteret.
3.4.4 Program→ Kommando-faneblad, Bevæg
’Bevæg’ kommandoen styrer robottens bevægelser gennem de underlig-gende viapunkter. Viapunkterne skal ligge under en Bevæg kommando. ’Be-væg’ kommandoen definerer accelerationen og hastigheden for robottens be-vægelse, og ogsa om bevægelsen er i joint space eller linear space. I joint s-pace styres hvert led til at na den ønskede slutposition pa samme tid, hvilketresulterer i en buet kurve for værktøjet, hvorimod leddene i linear space udføreren mere kompliceret bevægelse for at holde værktøjet pa en lige sti. Genereltkan robotten bevæge sig hurtigere i joint space. I programtræ-visning, skifterkommandoen mellem Bevægj og bevægl for at vise hvilken type bevægelseder er valgt.
Indstillingerne for en ’Bevæg’ kommando gælder for bevægelsen fra robot-tens nuværende position til kommandoens første viapunkt, og derfra til hver afde følgende viapunkter. ’Bevæg’ kommando indstillingerne gælder ikke for be-vægelsen fra det sidste viapunkt under Bevæg kommandoen.
52 UR-6-85-5-A
3.4. Programmering
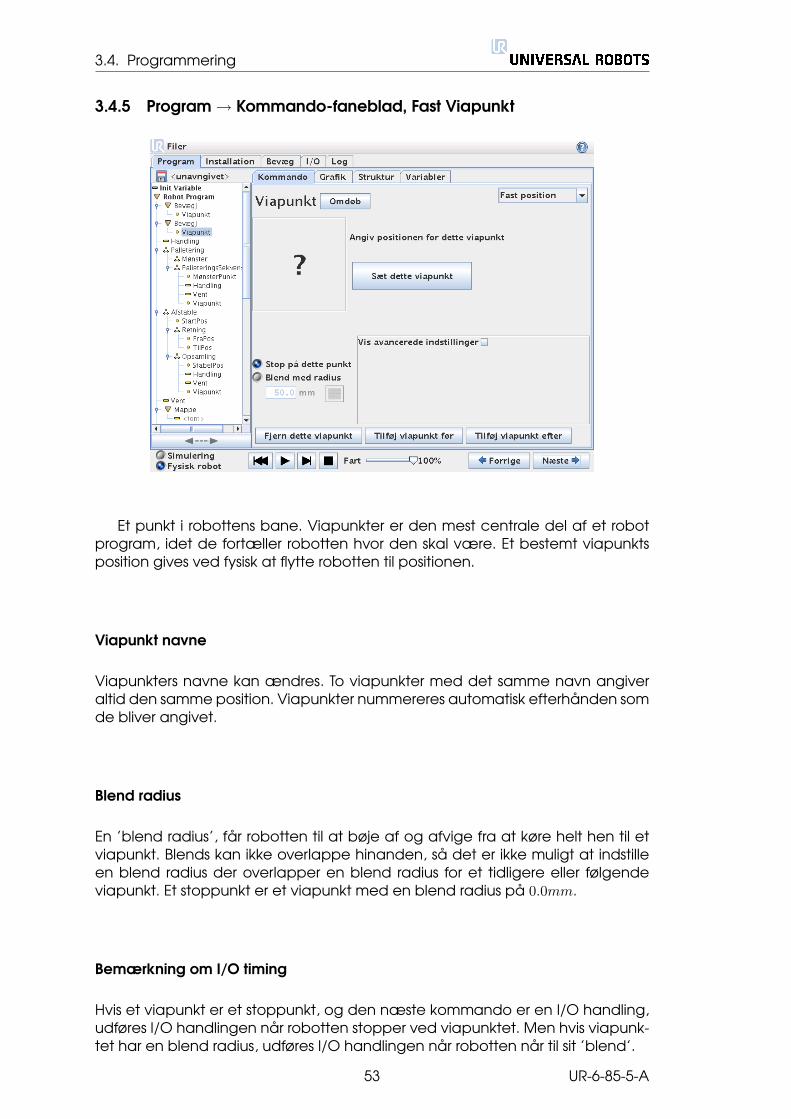
3.4.5 Program→ Kommando-faneblad, Fast Viapunkt
Et punkt i robottens bane. Viapunkter er den mest centrale del af et robotprogram, idet de fortæller robotten hvor den skal være. Et bestemt viapunktsposition gives ved fysisk at flytte robotten til positionen.
Viapunkt navne
Viapunkters navne kan ændres. To viapunkter med det samme navn angiveraltid den samme position. Viapunkter nummereres automatisk efterhanden somde bliver angivet.
Blend radius
En ’blend radius’, far robotten til at bøje af og afvige fra at køre helt hen til etviapunkt. Blends kan ikke overlappe hinanden, sa det er ikke muligt at indstilleen blend radius der overlapper en blend radius for et tidligere eller følgendeviapunkt. Et stoppunkt er et viapunkt med en blend radius pa 0.0mm.
Bemærkning om I/O timing
Hvis et viapunkt er et stoppunkt, og den næste kommando er en I/O handling,udføres I/O handlingen nar robotten stopper ved viapunktet. Men hvis viapunk-tet har en blend radius, udføres I/O handlingen nar robotten nar til sit ’blend’.
53 UR-6-85-5-A

3.4. Programmering
Eksempel
Waypoint2
WaypointStartmovel
Waypoint1
if (digital_input[1]) then
else
endif
WaypointEnd1
WaypointEnd2
Program
Ending point 1
Starting point
Straight line segment
5 cm blendWaypoint 1
Waypoint 210 cm blend
Ending point 2
Straight line segment
This is where the inputport is read!
Et lille eksempel, hvor et robotprogram flytter værktøjet fra en udgangsposi-tion til en af to slutpositioner, afhængig af tilstanden for digital input[1].Bemærk, at værktøjets bane (tyk sort linje) bevæger sig i lige linier uden for’blend’ omraderne (stiplede cirkler), mens værktøjets bane afviger fra de ligelinjer inde i ’blend’ omraderne. Bemærk ogsa at digital input[1] sensorenstilstand læses ligesom robotten skal til at ga ind i ’blend’ omradet ved Waypoint2, selvom hvis...sa kommandoen kommer efter Waypoint 2 i programræk-kefølgen. DEtte er lidt ulogisk, men det er nødvendigt for at fa robotten til atvælge den rette ’blend’ sti.
3.4.6 Program→ Kommando-faneblad, Relativt viapunkt
Et viapunkt med positionen givet i forhold til robottens tidligere position, sasom“to centimeter til venstre”. Den relative position defineres som forskellen mellemde to givne positioner (venstre til højre). Bemærk, at gentagne relative positio-ner kan flytte robotten ud af sit arbejdsomrade.
54 UR-6-85-5-A
3.4. Programmering
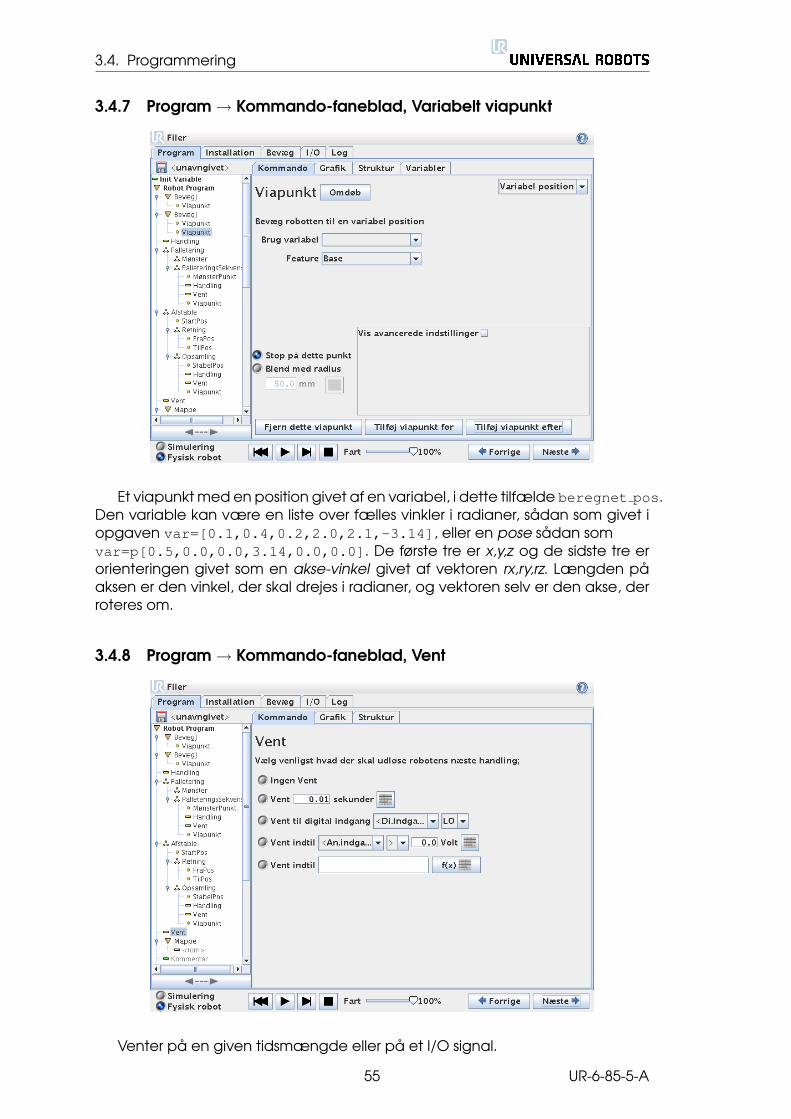
3.4.7 Program→ Kommando-faneblad, Variabelt viapunkt
Et viapunkt med en position givet af en variabel, i dette tilfælde beregnet pos.Den variable kan være en liste over fælles vinkler i radianer, sadan som givet iopgaven var=[0.1,0.4,0.2,2.0,2.1,-3.14], eller en pose sadan somvar=p[0.5,0.0,0.0,3.14,0.0,0.0]. De første tre er x,y,z og de sidste tre erorienteringen givet som en akse-vinkel givet af vektoren rx,ry,rz. Længden paaksen er den vinkel, der skal drejes i radianer, og vektoren selv er den akse, derroteres om.
3.4.8 Program→ Kommando-faneblad, Vent
Venter pa en given tidsmængde eller pa et I/O signal.
55 UR-6-85-5-A
3.4. Programmering
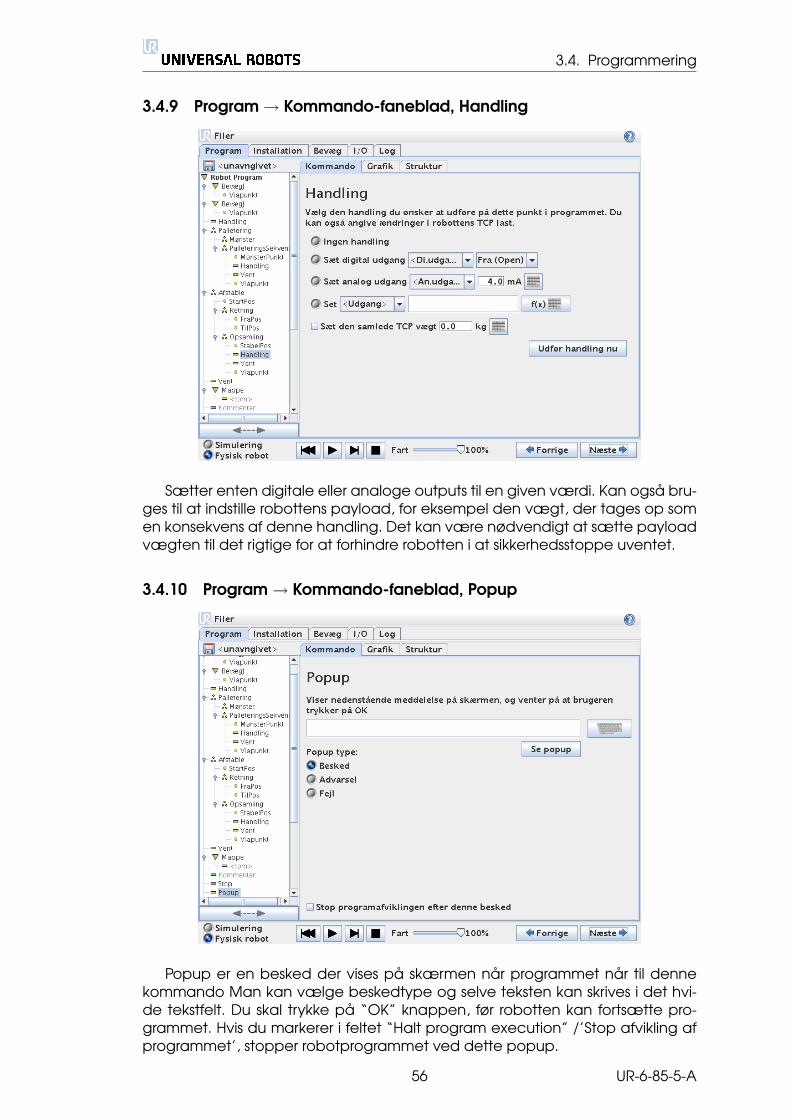
3.4.9 Program→ Kommando-faneblad, Handling
Sætter enten digitale eller analoge outputs til en given værdi. Kan ogsa bru-ges til at indstille robottens payload, for eksempel den vægt, der tages op somen konsekvens af denne handling. Det kan være nødvendigt at sætte payloadvægten til det rigtige for at forhindre robotten i at sikkerhedsstoppe uventet.
3.4.10 Program→ Kommando-faneblad, Popup
Popup er en besked der vises pa skærmen nar programmet nar til dennekommando Man kan vælge beskedtype og selve teksten kan skrives i det hvi-de tekstfelt. Du skal trykke pa “OK” knappen, før robotten kan fortsætte pro-grammet. Hvis du markerer i feltet “Halt program execution” /’Stop afvikling afprogrammet’, stopper robotprogrammet ved dette popup.
56 UR-6-85-5-A
3.4. Programmering
3.4.11 Program→ Kommando-faneblad, Stop
Programafviklingen stopper her.
3.4.12 Program→ Kommando-faneblad, Kommentar
Giver programmøren mulighed for at tilføje en tekstlinje til programmet. Den-ne tekstlinje har ingen betydning for programudførelsen.
57 UR-6-85-5-A

3.4. Programmering
3.4.13 Program→ Kommando-faneblad, Mappe
En mappe bruges til at organisere og mærke specifikke dele af et program,at rydde op i programtræet, og at gøre programmet lettere at læse og navi-gere i.
En mappe i sig selv gør ingenting.
3.4.14 Program→ Kommando-faneblad, Gentag
Far de underliggende programkommandoer til at køre i løkke. Afhængig afvalget, køres de underliggende programkommandoer uendeligt i en løkke, en-ten et vist antal gange eller sa længe en given betingelse er sand. Nar der erkørt i løkke et vist antal gange, skabes en dedikeret loop variabel (kaldet loop 1
58 UR-6-85-5-A

3.4. Programmering
i skærmbilledet ovenfor), som kan bruges til udtryk inden for løkken. Loop vari-ablen tæller fra 0 til N − 1.
Nar du kører i løkke med et udtryk som slutbetingelse, muliggør PolyScopeen løbende evaluering af udtrykket, saledes at “loopet” kan afbrydes nar somhelst under udførelsen, og ikke kun efter hver iteration.
3.4.15 Program→ Kommando-faneblad, Underprogram
Et underprogram kan indeholde dele, der er behov for flere steder. Et un-derprogram kan være en separat fil pa en disk, og kan ogsa være skjult for atbeskytte mod utilsigtede ændringer i underprogrammet.
3.4.16 Program→ Kommando-faneblad, Kald Underprogram
59 UR-6-85-5-A

3.4. Programmering
Et kald til et underprogram vil køre programlinierne i underprogrammet ogderefter vende tilbage til linien efter kaldet.
3.4.17 Program→ Kommando-faneblad, Tildeling
Tildeler værdier til variable. Den beregnede værdi af den højre side sættesind i variablen pa venstre side. Dette kan være nyttigt i komplekse programmer.
3.4.18 Program→ Kommando-faneblad, Hvis
En “hvis..sa..ellers” opbygning kan fa robotten til at ændre sine bevægelserbaseret pa sensorindgange eller variable værdier. Brug ’udtrykseditor’ til at be-skrive betingelserne for, at robotten skal ga til sub-kommandoer i denne Hvis.Hvis betingelsen vurderes til Sand, udføres linierne inden for Hvis.
60 UR-6-85-5-A
3.4. Programmering
Hver Hvis kan have flere EllersHvis og en Ellers kommando. Disse kantilføjes ved at bruge knapperne pa skærmen. En EllersHvis kommando kanfjernes fra skærmen for denne kommando.
Den abne Check udtryk løbende tillader at betingelserne for udsagnene iHvis og EllersHvis evalueres, mens de indeholdte linier udføres. Hvis et udtrykvurderes til Falsk i Hvis-delen, opnas det følgende EllersHvis eller Ellersudsagn.
3.4.19 Program→ Kommando-faneblad, Script
Denne kommando giver adgang til det underliggende realtids script sprog,som afvikles i controlleren. Bør kun tilgas af avancerede brugere.
Valg af “Fil” i øverste venstre hjørne, giver mulighed for at danne og editerescript programfiler. Pa denne made kan lange og komplekse script-programmeranvendes sammen med den operatørvenlige programmering i PolyScope.
61 UR-6-85-5-A

3.4. Programmering
3.4.20 Program→ Kommando-faneblad, Hændelse
En hændelse kan bruges til at overvage et indgangssignal, og udføre enhandling eller sætte en variabel, nar indgangssignalet gar højt. For eksempel,i tilfælde af robotten skal sende et signal til en maskine, hvor signalet skal gahøjt i 100ms og derefter lavt igen. Dette realiseres nemmest ved hjælp af enhændelse.
3.4.21 Program→ Kommando-faneblad, Trad
En trad er en parrallel proces til robotprogrammet. En trad kan anvendes til atstyre en ekstern maskine uafhængig af robotarmen. En trad kan kommunikeremed robotprogrammet med variable og output-signaler.
62 UR-6-85-5-A

3.4. Programmering
3.4.22 Program→ Kommando-faneblad, Mønster
Pattern (mønster) kommandoen kan bruges til at skifte imellem positionerne irobotprogrammet. Pattern kommandoen svarer til en position pa hver udførelse.
Der er 4 typer mønster. De første tre, “Linie”, “Firkant” eller “Kasse” kan an-vendes til positioner i et regelmæssigt mønster. Regelmæssige mønstre defineresved et antal karakteristiske punkter, hvor punkterne definerer mønstrets hjørner.Ved “Linie” er det de to slutpunkter, ved “Firkant” er det tre af fire hjørnepunkter,mens ved “Kasse” er det fire af otte hjørnepunkter. Antallet af positioner for hverthjørne i mønstret indtastes. Herefter beregner controlleren de enkelte mønsterpositionerved proportionalt at lægger hjørnevektorerne sammen.
Hvis positionerne ikke skal bevæge sig i et regelmæssigt mønster, kan manvælge “Liste”, hvor man kan indtaste de forskellige positioner. Pa denne madekan alle mulige positioner opnas.
Definer mønster
Nar “Kasse” mønsteret vælges, ændres skærmen som vist nedenfor.
63 UR-6-85-5-A
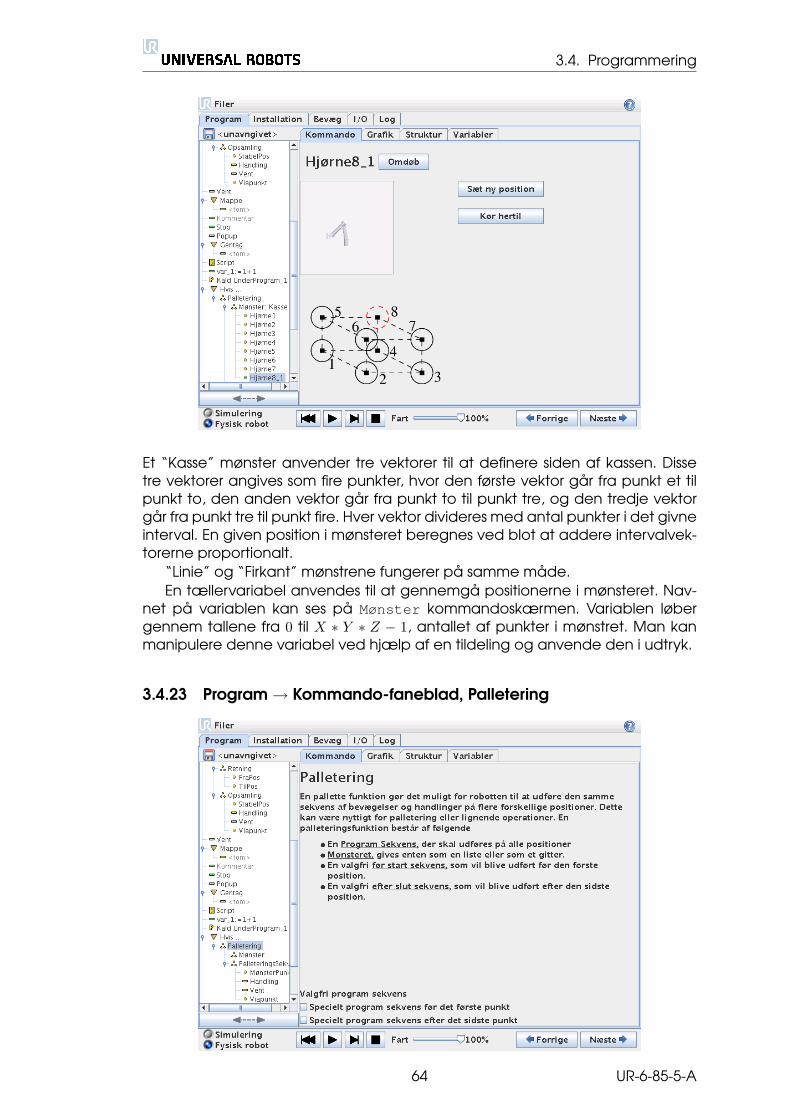
3.4. Programmering
Et “Kasse” mønster anvender tre vektorer til at definere siden af kassen. Dissetre vektorer angives som fire punkter, hvor den første vektor gar fra punkt et tilpunkt to, den anden vektor gar fra punkt to til punkt tre, og den tredje vektorgar fra punkt tre til punkt fire. Hver vektor divideres med antal punkter i det givneinterval. En given position i mønsteret beregnes ved blot at addere intervalvek-torerne proportionalt.
“Linie” og “Firkant” mønstrene fungerer pa samme made.En tællervariabel anvendes til at gennemga positionerne i mønsteret. Nav-
net pa variablen kan ses pa Mønster kommandoskærmen. Variablen løbergennem tallene fra 0 til X ∗ Y ∗ Z − 1, antallet af punkter i mønstret. Man kanmanipulere denne variabel ved hjælp af en tildeling og anvende den i udtryk.
3.4.23 Program→ Kommando-faneblad, Palletering
64 UR-6-85-5-A

3.4. Programmering
En palleteringsfunktion kan udføre en sekvens af bevægelser til en række ste-der, angivet som et mønster, som beskrevet i afsnit 3.4.22. Pa hver af positioner-ne i mønstret, vil rækkefølgen af bevægelser blive kørt i relation til mønsterpositionerne.
Programmere et palleteringsforløb
Følgende trin skal følges;
1. Definer mønsteret.
2. Lav en “PalletSequence” til picking up/placing pa hvert enkelt punkt. Se-kvensen beskriver hvad der skal gøres pa hver mønsterposition.
3. Brug vælgeren pa sekvens-kommandoskærmen til at definere hvilke waypo-ints i sekvensen der skal korrespondere med mønsterpositionerne.
Palleteringssekvens/Ankersekvens
Pa en palleteringssekvens-linie er robottens bevægelser relative i forhold til pal-leteringspositionen. En sekvens forholder sig sadan, at robotten vil tage udgangs-punkt i den af mønsteret definerede position, i anker positionen/mønsterpunktet.De resterende positioner flyttes alle, sa de passer hertil.
Anvend ikke Move kommandoen inde i en sekvens, da den ikke kan værereativ i forhold til ankerpositionen.
“FørStart”
Den valgbare BeforeStart sekvens kører umiddelbart inden forløbet starter.Den kan bruges til at afvente klarsignaler.
“EfterSlut”
Den valgbare AfterEnd sekvens kører nar forløbet er slut. Den kan bruges til atsignalisere til transportøren om at forberede den næste palletering.
3.4.24 Program→ Kommando-faneblad, Stabling
Stable-funktionen svarer til palletering med et ’linie’ mønster. Men, stable-funktionenbruger en sensor til at bestemme, hvornar den korrekte position, for at gribe ellertabe et element, er naet. Sensoren kan være en trykknapkontakt, en tryksensoreller en kapacitiv sensor.
Stabling Afstabling
65 UR-6-85-5-A
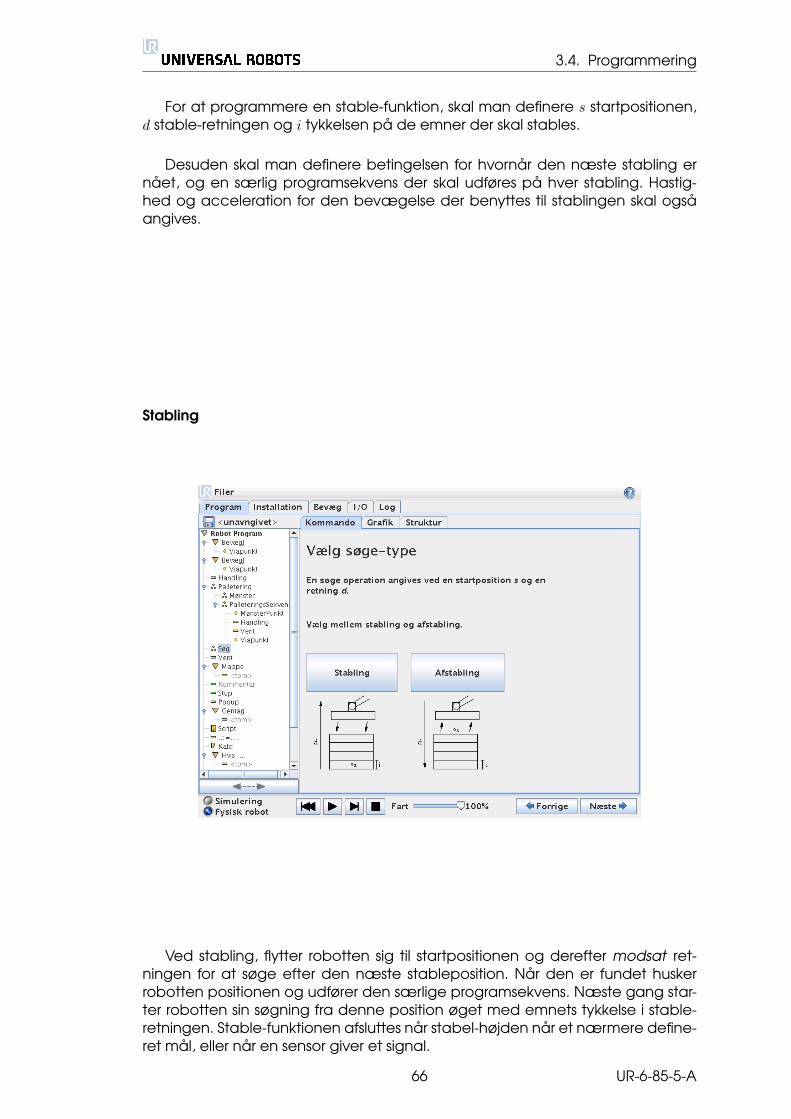
3.4. Programmering
For at programmere en stable-funktion, skal man definere s startpositionen,d stable-retningen og i tykkelsen pa de emner der skal stables.
Desuden skal man definere betingelsen for hvornar den næste stabling ernaet, og en særlig programsekvens der skal udføres pa hver stabling. Hastig-hed og acceleration for den bevægelse der benyttes til stablingen skal ogsaangives.
Stabling
Ved stabling, flytter robotten sig til startpositionen og derefter modsat ret-ningen for at søge efter den næste stableposition. Nar den er fundet huskerrobotten positionen og udfører den særlige programsekvens. Næste gang star-ter robotten sin søgning fra denne position øget med emnets tykkelse i stable-retningen. Stable-funktionen afsluttes nar stabel-højden nar et nærmere define-ret mal, eller nar en sensor giver et signal.
66 UR-6-85-5-A
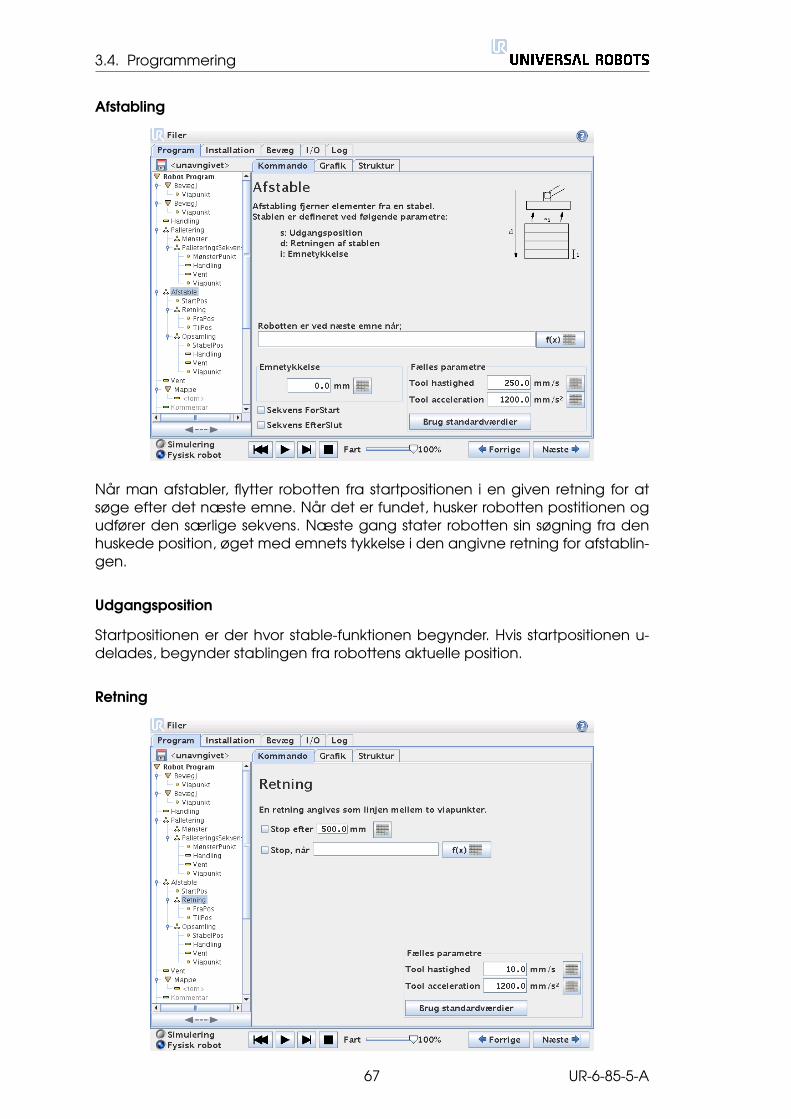
3.4. Programmering
Afstabling
Nar man afstabler, flytter robotten fra startpositionen i en given retning for atsøge efter det næste emne. Nar det er fundet, husker robotten postitionen ogudfører den særlige sekvens. Næste gang stater robotten sin søgning fra denhuskede position, øget med emnets tykkelse i den angivne retning for afstablin-gen.
Udgangsposition
Startpositionen er der hvor stable-funktionen begynder. Hvis startpositionen u-delades, begynder stablingen fra robottens aktuelle position.
Retning
67 UR-6-85-5-A
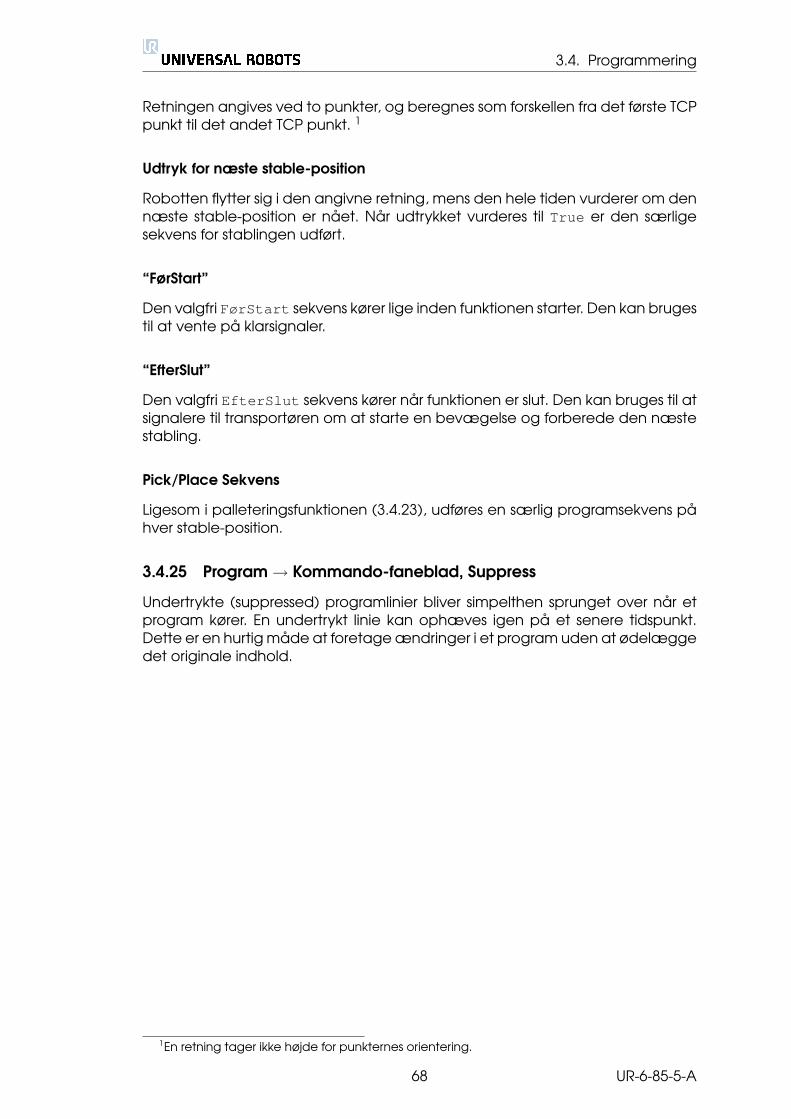
3.4. Programmering
Retningen angives ved to punkter, og beregnes som forskellen fra det første TCPpunkt til det andet TCP punkt. 1
Udtryk for næste stable-position
Robotten flytter sig i den angivne retning, mens den hele tiden vurderer om dennæste stable-position er naet. Nar udtrykket vurderes til True er den særligesekvens for stablingen udført.
“FørStart”
Den valgfri FørStart sekvens kører lige inden funktionen starter. Den kan brugestil at vente pa klarsignaler.
“EfterSlut”
Den valgfri EfterSlut sekvens kører nar funktionen er slut. Den kan bruges til atsignalere til transportøren om at starte en bevægelse og forberede den næstestabling.
Pick/Place Sekvens
Ligesom i palleteringsfunktionen (3.4.23), udføres en særlig programsekvens pahver stable-position.
3.4.25 Program→ Kommando-faneblad, Suppress
Undertrykte (suppressed) programlinier bliver simpelthen sprunget over nar etprogram kører. En undertrykt linie kan ophæves igen pa et senere tidspunkt.Dette er en hurtig made at foretage ændringer i et program uden at ødelæggedet originale indhold.
1En retning tager ikke højde for punkternes orientering.
68 UR-6-85-5-A
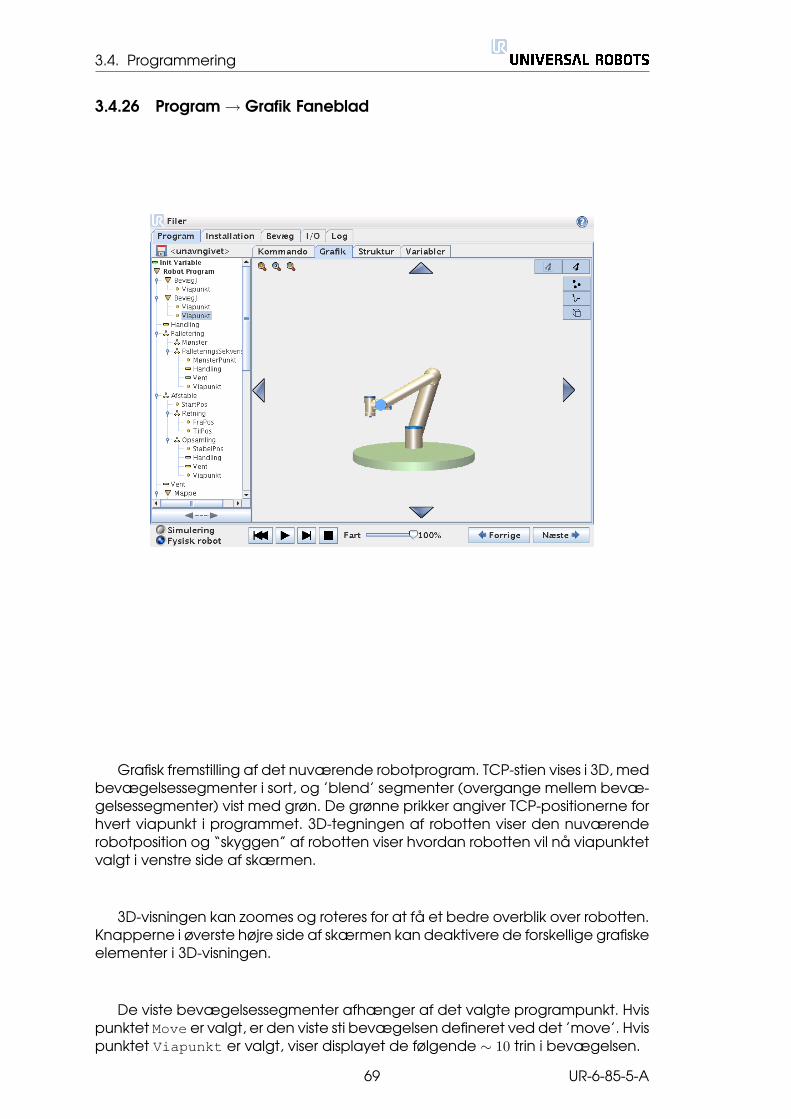
3.4. Programmering
3.4.26 Program→ Grafik Faneblad
Grafisk fremstilling af det nuværende robotprogram. TCP-stien vises i 3D, medbevægelsessegmenter i sort, og ’blend’ segmenter (overgange mellem bevæ-gelsessegmenter) vist med grøn. De grønne prikker angiver TCP-positionerne forhvert viapunkt i programmet. 3D-tegningen af robotten viser den nuværenderobotposition og “skyggen” af robotten viser hvordan robotten vil na viapunktetvalgt i venstre side af skærmen.
3D-visningen kan zoomes og roteres for at fa et bedre overblik over robotten.Knapperne i øverste højre side af skærmen kan deaktivere de forskellige grafiskeelementer i 3D-visningen.
De viste bevægelsessegmenter afhænger af det valgte programpunkt. Hvispunktet Move er valgt, er den viste sti bevægelsen defineret ved det ’move’. Hvispunktet Viapunkt er valgt, viser displayet de følgende ∼ 10 trin i bevægelsen.
69 UR-6-85-5-A

3.4. Programmering
3.4.27 Program→ Struktur-faneblad
Struktur-fanebladet giver mulighed for at indsætte, flytte, kopiere og fjernede forskellige kommandotyper. For at indsætte nye kommandoer, skal du udførefølgende trin:
1) Vælg en eksisterende programkommando.
2) Vælg om den nye kommando skal indsættes over eller under den valgtekommando.
3) Tryk pa knappen for den kommandotype du ønsker at indsætte. For attilpasse detaljerne for den nye kommando, ga til Kommando fanebladet.
Kommandoer kan flyttes / klones / fjernes ved at bruge knapperne i redige-ringsbilledet. Hvis en kommando har sub-kommandoer (en trekant ud for kom-mandoen), flyttes / klones / slettes alle sub-kommandoer ogsa .
Ikke alle kommandoer passer alle steder i et program. Viapunkter skal væ-re under en Move kommando (ikke nødvendigvis direkte under). EllersHvisog Ellers kommandoer skal være efter en Hvis. Generelt kan det være be-sværligt at flytte EllersHvis kommandoer rundt. Variable skal tildeles værdierinden de kan bruges.
70 UR-6-85-5-A
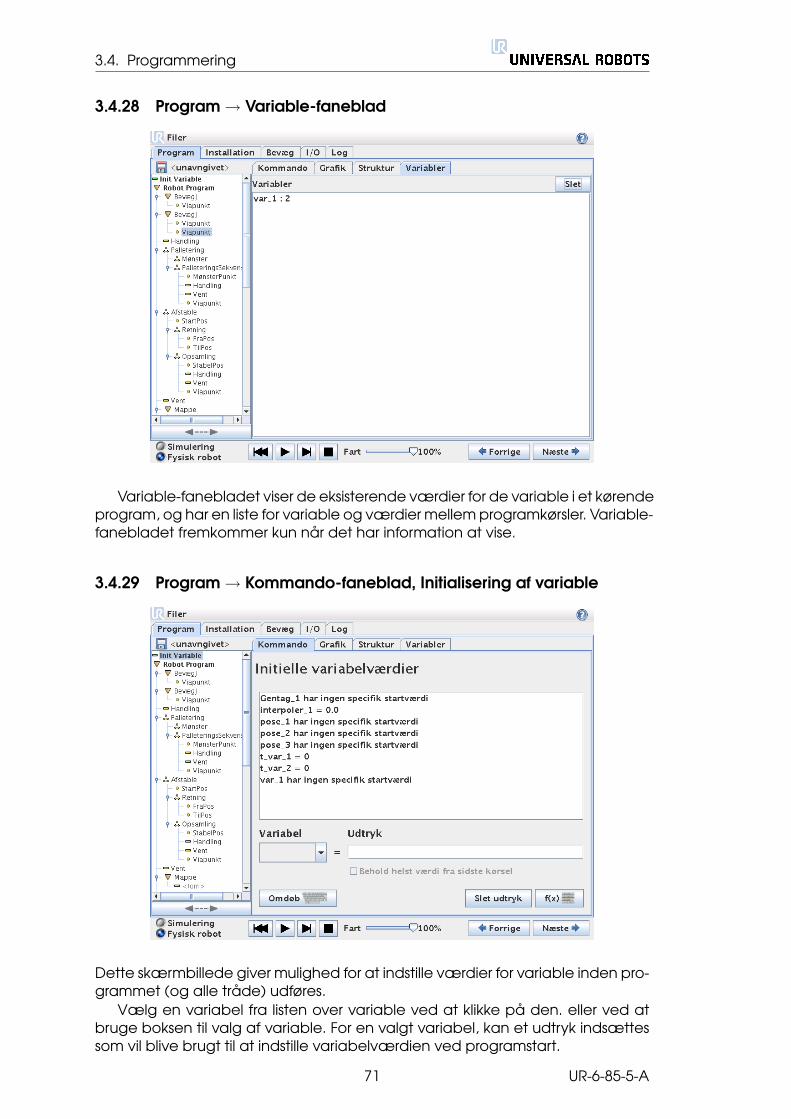
3.4. Programmering
3.4.28 Program→ Variable-faneblad
Variable-fanebladet viser de eksisterende værdier for de variable i et kørendeprogram, og har en liste for variable og værdier mellem programkørsler. Variable-fanebladet fremkommer kun nar det har information at vise.
3.4.29 Program→ Kommando-faneblad, Initialisering af variable
Dette skærmbillede giver mulighed for at indstille værdier for variable inden pro-grammet (og alle trade) udføres.
Vælg en variabel fra listen over variable ved at klikke pa den. eller ved atbruge boksen til valg af variable. For en valgt variabel, kan et udtryk indsættessom vil blive brugt til at indstille variabelværdien ved programstart.
71 UR-6-85-5-A

3.5. Setup
Hvis ’Foretrækker at bevare værdi fra sidste kørsel’ checkboxen er valgt, vilden variable initialiseres til den værdi, der findes pa Variable fanebladet, derer beskrevet i afsnit 3.4.28. Sadan kan variable bevare deres værdier mellemprogramudførelser. Variablen far sin værdi fra udtrykket, hvis programmet køresfor første gang, eller hvis indholdet pa værdifanebladet er blevet slettet.
En variabel kan slettes fra programmet ved at ændre dens navn til <blank>.
3.5 Setup
3.5.1 Setup Skærm
• Initialiser Robot Gar til initialiseringsskærmen, se afsnit 3.5.2.
• Opdater Opgraderer robotsoftwaren til en nyere version via Internettet, seafsnit 3.5.4.
• Opret password Giver mulighed for at lase programmeringsdelen af robot-ten for folk uden password, se afsnit 3.5.5.
• Kalibreringsskærm Kalibrerer “tryk” pa trykskærmen, se afsnit 3.5.6.
• Netværk Setup Abner interfacet til oprettelse af et Ethernet-netværk til ro-botten, se afsnit 3.5.7.
• Tilbage Vender tilbage til velkomstskærmen.
72 UR-6-85-5-A
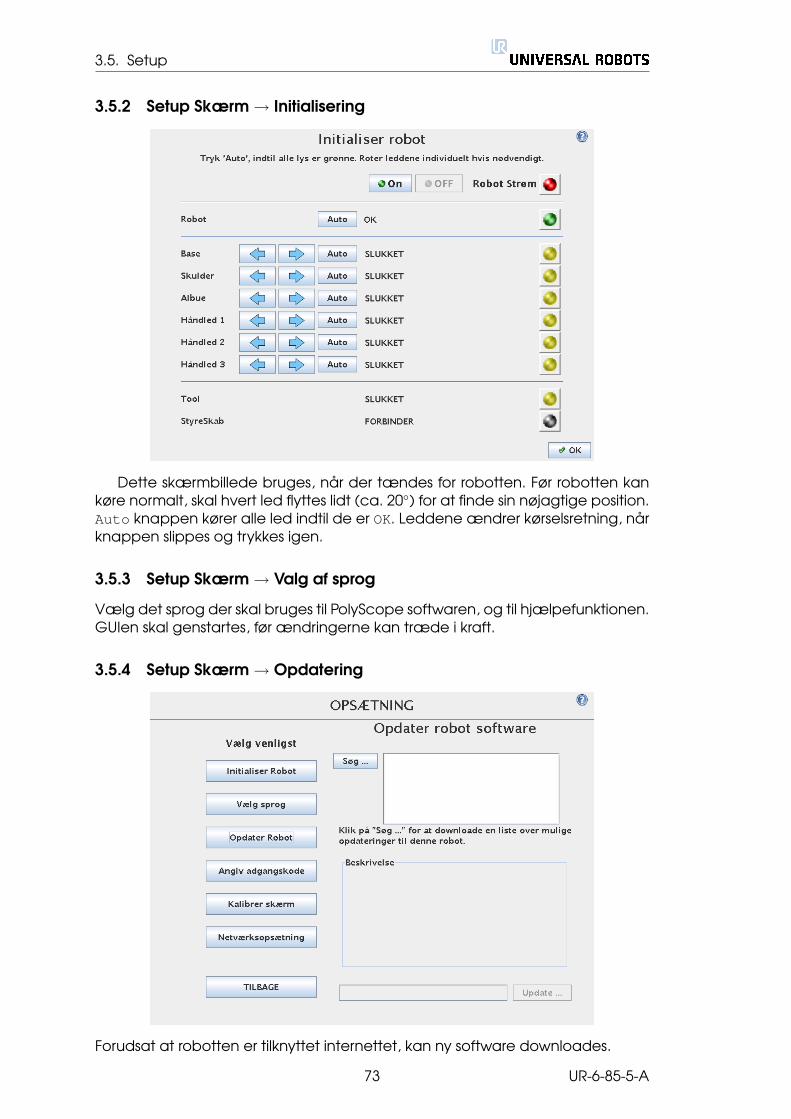
3.5. Setup
3.5.2 Setup Skærm→ Initialisering
Dette skærmbillede bruges, nar der tændes for robotten. Før robotten kankøre normalt, skal hvert led flyttes lidt (ca. 20◦) for at finde sin nøjagtige position.Auto knappen kører alle led indtil de er OK. Leddene ændrer kørselsretning, narknappen slippes og trykkes igen.
3.5.3 Setup Skærm→ Valg af sprog
Vælg det sprog der skal bruges til PolyScope softwaren, og til hjælpefunktionen.GUIen skal genstartes, før ændringerne kan træde i kraft.
3.5.4 Setup Skærm→ Opdatering
Forudsat at robotten er tilknyttet internettet, kan ny software downloades.
73 UR-6-85-5-A
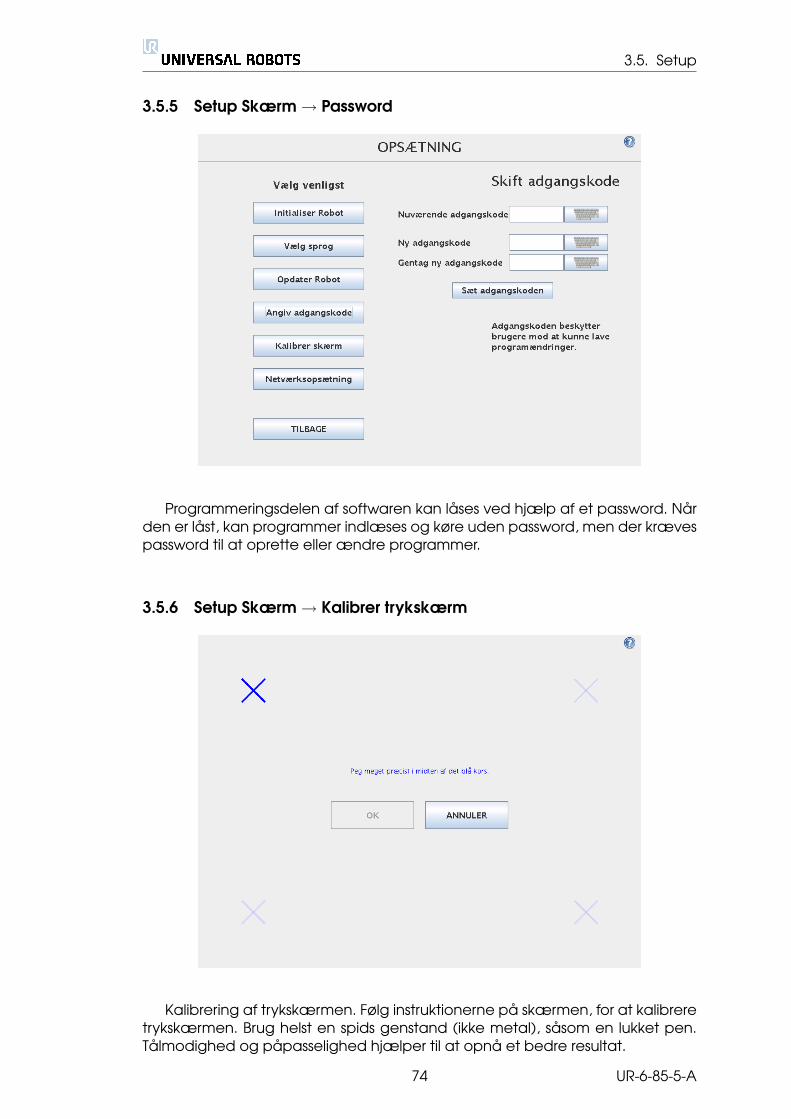
3.5. Setup
3.5.5 Setup Skærm→ Password
Programmeringsdelen af softwaren kan lases ved hjælp af et password. Narden er last, kan programmer indlæses og køre uden password, men der krævespassword til at oprette eller ændre programmer.
3.5.6 Setup Skærm→ Kalibrer trykskærm
Kalibrering af trykskærmen. Følg instruktionerne pa skærmen, for at kalibreretrykskærmen. Brug helst en spids genstand (ikke metal), sasom en lukket pen.Talmodighed og papasselighed hjælper til at opna et bedre resultat.
74 UR-6-85-5-A
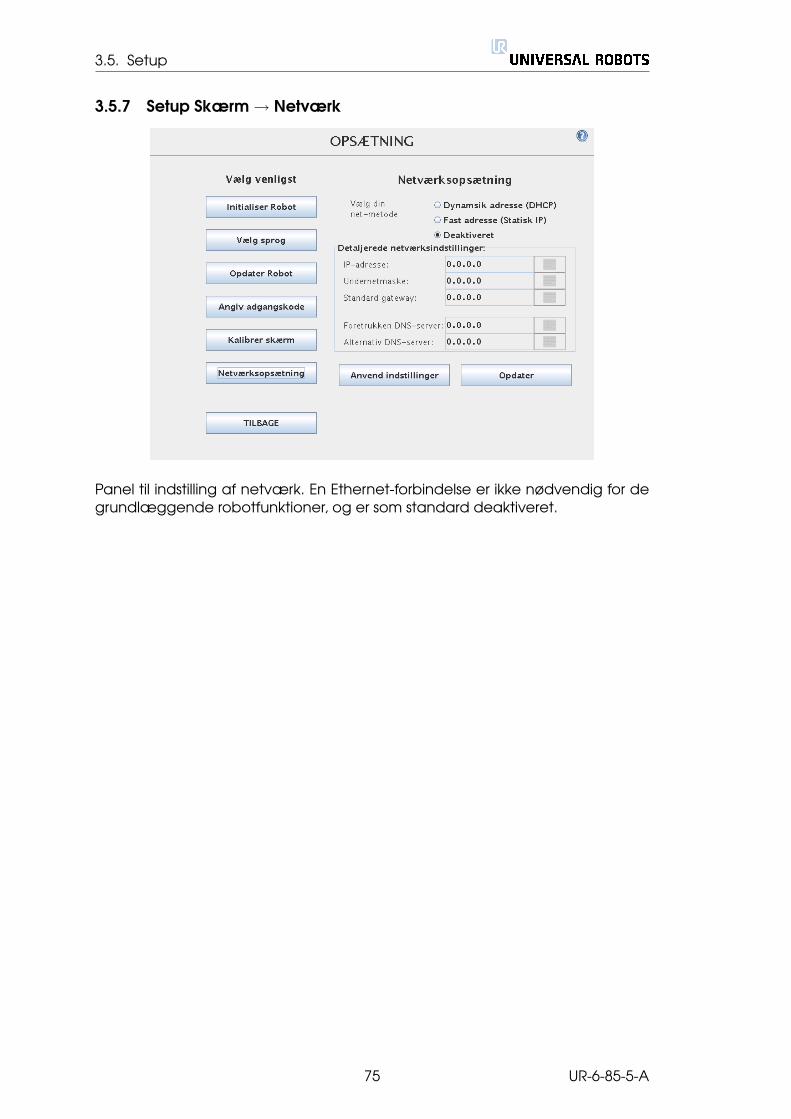
3.5. Setup
3.5.7 Setup Skærm→ Netværk
Panel til indstilling af netværk. En Ethernet-forbindelse er ikke nødvendig for degrundlæggende robotfunktioner, og er som standard deaktiveret.
75 UR-6-85-5-A

3.5. Setup
76 UR-6-85-5-A

Kapitel 4
Sikkerhed
4.1 Introduktion
Dette kapitel giver en introduktion til den lovpligtige dokumentation, efterfulgtaf vigtig information om risikovurderingen. Mht. sikkerhed i generel forstand skalmonteringsvejledning fra 1.4 og 2 følges.
4.2 Lovpligtig dokumentation
En robotinstallation i EU skal overholde maskindirektivet for at garantere denssikkerhed. Dette inkluderer følgende punkter.
1. Tjek at produktet overholder alle essentielle krav.
2. Lav en risikovurdering.
3. Lav instruktioner til operatøren.
4. Lav en overensstemmelseserklæring.
5. Saml al dokumentation til et teknisk dossier.
6. Sæt et CE mærke pa robotinstallationen.
Ved en given robotinstallation er det integratoren, der er ansvarlig for at dener i overensstemmelse med relevante direktiver. Universal robots er ansvarlig for,at selve robotten er i overensstemmelse med relevante direktiver.
Universal Robots har lavet en sikkerhedsguide, som kan hentes pahttp://www.universal-robots.com, og som er tiltænkt integratorer, som har lidteller slet ingen erfaring med at lave den nødvendige dokumentation.
4.3 Risikovurdering
En af de vigtigste opgaver for en integrator er risikovurderingen. Universal Robotshar identificeret nogle potentielt betydelige farer, som en integrator skal tagestilling til, se nedenfor. Bemærk at andre betydelige farer kan være tilstede i enkonkret robotinstallation.
1. Fastklemning af fingre mellem robottens fod og base (led 0).
2. Fastklemning af fingre mellem arm og handled (led 4).
77

4.3. Risikovurdering
3. Penetrering af hud mellem skarpe kanter og spidse punkter pa tool ogtoolstik.
4. Penetrering af hud fra skarpe kanter og spidse punkter nær ved robottensbane.
5. Bla mærker pa grund af slag fra robotten.
6. Forstuvning eller knoglebrud pa grund af slag mellem en tung nyttelast ogen hard overflade.
7. Konsekvenser som følge af løse bolte, der holder robotarm eller tool.
8. Elektrisk stød eller brand pa grund af strømforsyningsfejl, hvis lysnetstilslut-ningen ikke er beskyttet af et HFI eller HPFI relæ.
9. Elektrisk stød pa grund af strømforsyningsfejl, hvis controllerskabet ikke erforbundet til jord via lysnettet.
Pa trods af dette er UR-6-85-5-A dog en meget sikker robot pga. følgende.
1. Høj-niveau software genererer et beskyttelsesstop, hvis robotten rammernoget. Kraftgrænsen er lavere end 150N .
2. Lav-niveau software genererer et beskyttelsesstop, hvis et leds momentoverstiger 42Nm eller 10Nm for hhv. store og sma led. Disse niveauer ernominelle og relative i forhold til momenter, som beregnes rumtime fra enteoretisk model af robotten.
3. Softwaren forhindrer eksekvering af programmer, hvis robotten er montereti vinkler, som er betydeligt anderledes end specificeret.
4. Robottens kontrolsystem er redundant saledes at en systemfejl stopper ellerslukker robotten.
5. Robottens vægt er under 18kg.
6. Robottens udformning er blød, saledes at tryk (N/m2) per kraft (N) er redu-ceret.
7. Leddene i en slukket robot kan drejes af en enkelt person. Denne featureer dog kun til nødstilfælde, da det kan reducere robottens levetid.
Det faktum, at robotten er meget sikker, abner muligheden for enten at spa-re sikkerhedsgitre væk eller bruge billige sikkerhedsgitre med lav performancelevel. Som hjælp til at overbevise kunder og arbejdstilsyn er robotten UR-6-85-5-A blevet testet af Teknologisk Institut, som er Notified Body for maskindirektiet iDanmark. Denne test konkluderer at robotten er i overensstemmelse med arti-kel 5.10.5 i EN ISO 10218-1:2006. Denne standard er harmoniseret under maskin-direktivet, og fastslar, at en robot kan fungere sammen med mennesker (altsauden sikkerheds gitter mellem robot og operatør), hvis den er i overensstem-melse med artikel 5.10.5. Risikovurderingen skal selvfølgelig stadig konkludere,at den overordnede robotinstallation er sikker nok. En kopi af denne testrapportkan rekvireres fra Universal Robots.
78 UR-6-85-5-A
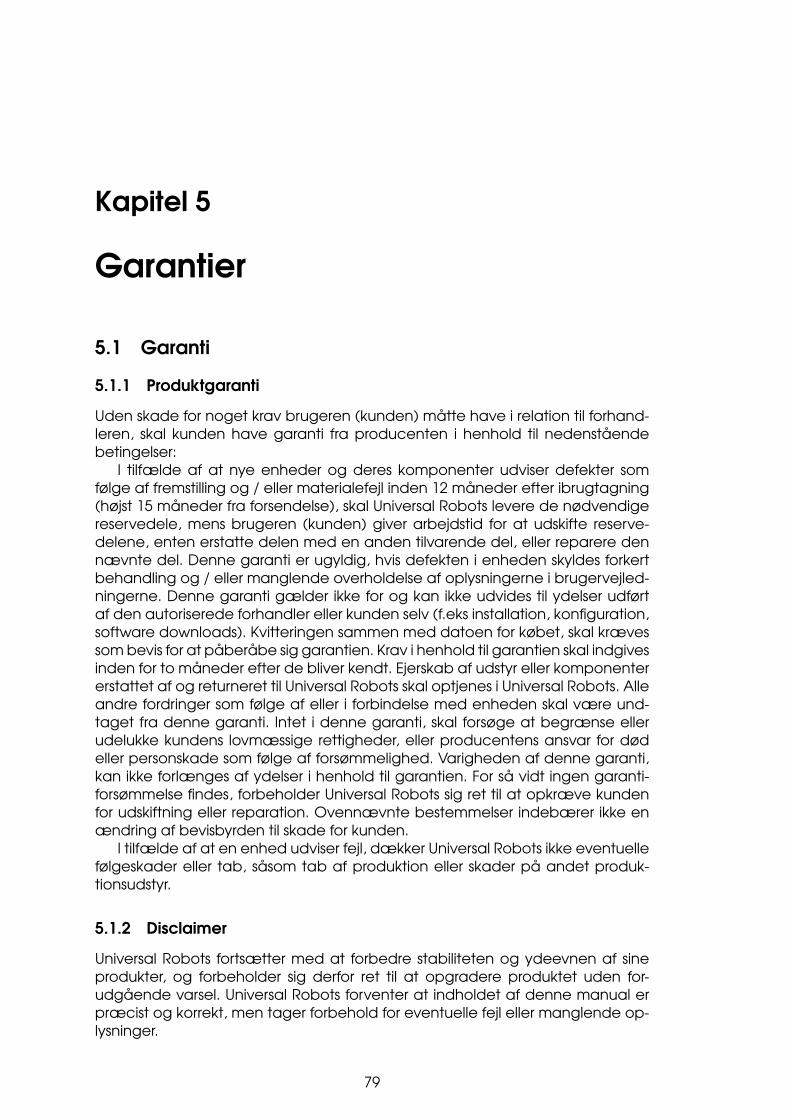
Kapitel 5
Garantier
5.1 Garanti
5.1.1 Produktgaranti
Uden skade for noget krav brugeren (kunden) matte have i relation til forhand-leren, skal kunden have garanti fra producenten i henhold til nedenstaendebetingelser:
I tilfælde af at nye enheder og deres komponenter udviser defekter somfølge af fremstilling og / eller materialefejl inden 12 maneder efter ibrugtagning(højst 15 maneder fra forsendelse), skal Universal Robots levere de nødvendigereservedele, mens brugeren (kunden) giver arbejdstid for at udskifte reserve-delene, enten erstatte delen med en anden tilvarende del, eller reparere dennævnte del. Denne garanti er ugyldig, hvis defekten i enheden skyldes forkertbehandling og / eller manglende overholdelse af oplysningerne i brugervejled-ningerne. Denne garanti gælder ikke for og kan ikke udvides til ydelser udførtaf den autoriserede forhandler eller kunden selv (f.eks installation, konfiguration,software downloads). Kvitteringen sammen med datoen for købet, skal krævessom bevis for at paberabe sig garantien. Krav i henhold til garantien skal indgivesinden for to maneder efter de bliver kendt. Ejerskab af udstyr eller komponentererstattet af og returneret til Universal Robots skal optjenes i Universal Robots. Alleandre fordringer som følge af eller i forbindelse med enheden skal være und-taget fra denne garanti. Intet i denne garanti, skal forsøge at begrænse ellerudelukke kundens lovmæssige rettigheder, eller producentens ansvar for dødeller personskade som følge af forsømmelighed. Varigheden af denne garanti,kan ikke forlænges af ydelser i henhold til garantien. For sa vidt ingen garanti-forsømmelse findes, forbeholder Universal Robots sig ret til at opkræve kundenfor udskiftning eller reparation. Ovennævnte bestemmelser indebærer ikke enændring af bevisbyrden til skade for kunden.
I tilfælde af at en enhed udviser fejl, dækker Universal Robots ikke eventuellefølgeskader eller tab, sasom tab af produktion eller skader pa andet produk-tionsudstyr.
5.1.2 Disclaimer
Universal Robots fortsætter med at forbedre stabiliteten og ydeevnen af sineprodukter, og forbeholder sig derfor ret til at opgradere produktet uden for-udgaende varsel. Universal Robots forventer at indholdet af denne manual erpræcist og korrekt, men tager forbehold for eventuelle fejl eller manglende op-lysninger.
79

5.1. Garanti
80 UR-6-85-5-A
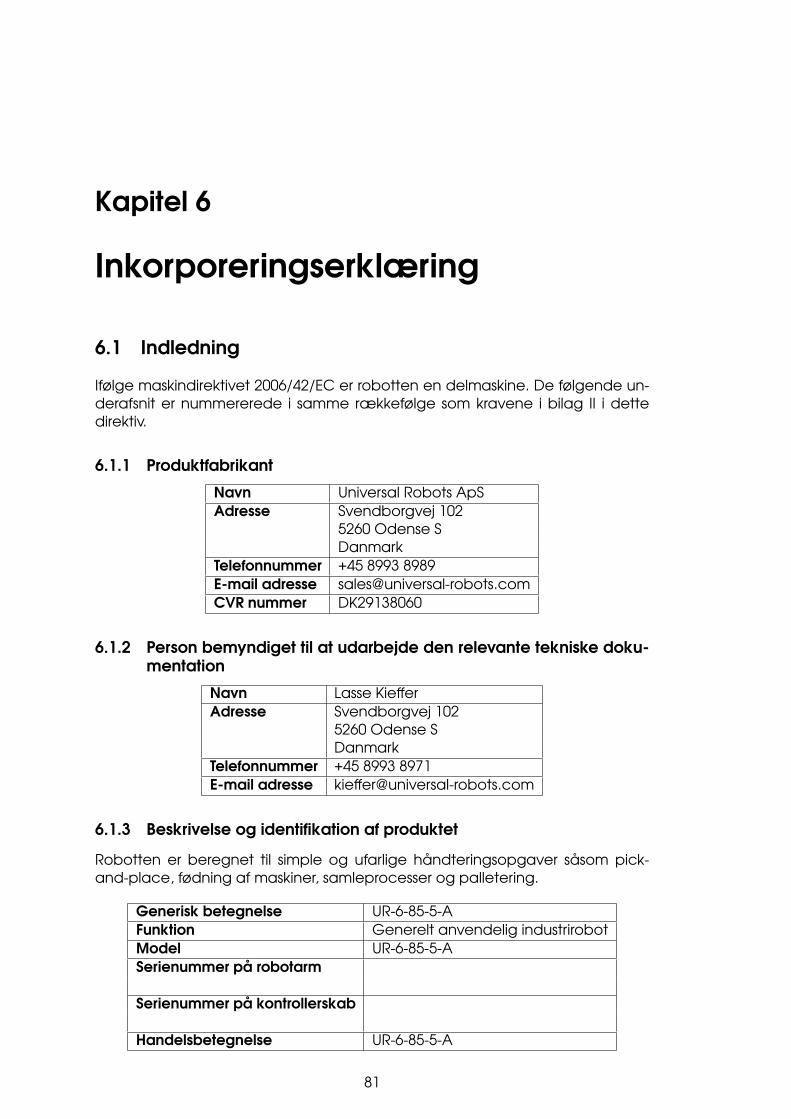
Kapitel 6
Inkorporeringserklæring
6.1 Indledning
Ifølge maskindirektivet 2006/42/EC er robotten en delmaskine. De følgende un-derafsnit er nummererede i samme rækkefølge som kravene i bilag II i dettedirektiv.
6.1.1 Produktfabrikant
Navn Universal Robots ApSAdresse Svendborgvej 102
5260 Odense SDanmark
Telefonnummer +45 8993 8989E-mail adresse [email protected] nummer DK29138060
6.1.2 Person bemyndiget til at udarbejde den relevante tekniske doku-mentation
Navn Lasse KiefferAdresse Svendborgvej 102
5260 Odense SDanmark
Telefonnummer +45 8993 8971E-mail adresse [email protected]
6.1.3 Beskrivelse og identifikation af produktet
Robotten er beregnet til simple og ufarlige handteringsopgaver sasom pick-and-place, fødning af maskiner, samleprocesser og palletering.
Generisk betegnelse UR-6-85-5-AFunktion Generelt anvendelig industrirobotModel UR-6-85-5-ASerienummer pa robotarm
Serienummer pa kontrollerskab
Handelsbetegnelse UR-6-85-5-A
81

6.1. Indledning
6.1.4 Væsentlige krav
Individuelle robotinstallationer har forskellige sikkerhedskrav, og det er derfor in-tegratoren, der er ansvarlig for alle risici, der ikke omfatter det generelle robot-design. Det generelle robotdesign, inklusive interfaces, lever op til alle væsentli-ge krav, som er listet i bilag I i 2006/42/EC.
Den tekniske dokumentation er i overensstemmelse med bilag VII del B i2006/42/EC.
82 UR-6-85-5-A
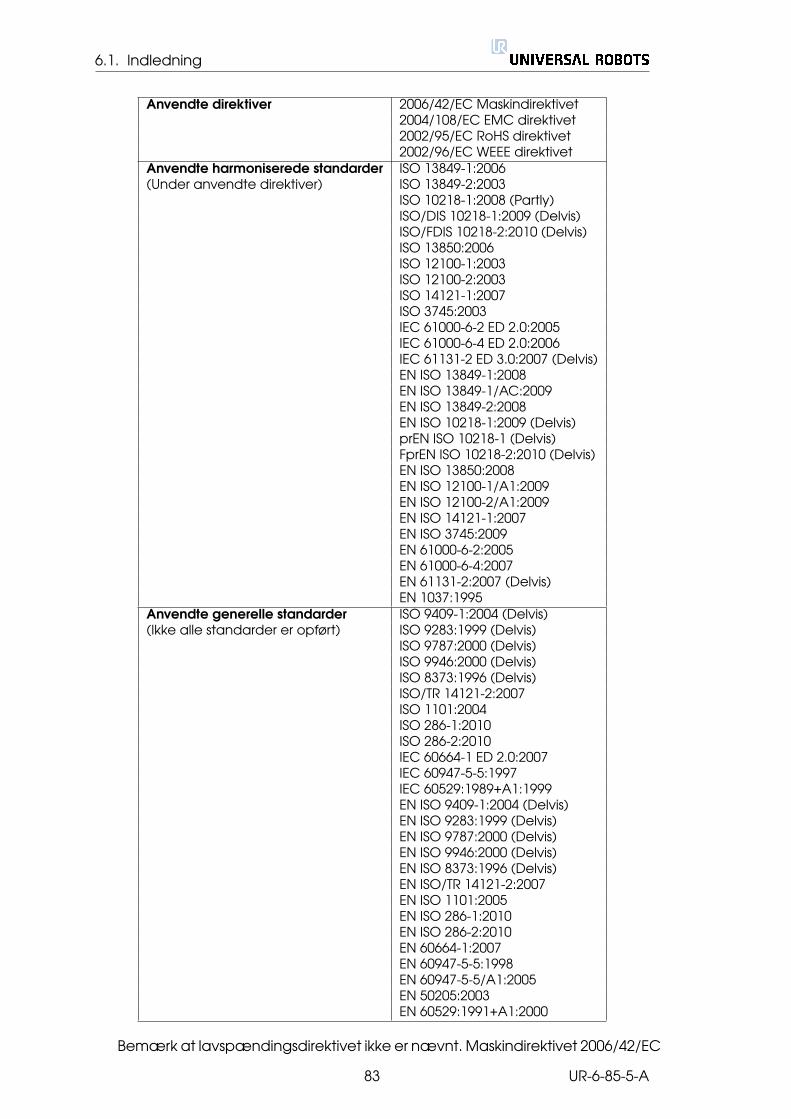
6.1. Indledning
Anvendte direktiver 2006/42/EC Maskindirektivet2004/108/EC EMC direktivet2002/95/EC RoHS direktivet2002/96/EC WEEE direktivet
Anvendte harmoniserede standarder ISO 13849-1:2006(Under anvendte direktiver) ISO 13849-2:2003
ISO 10218-1:2008 (Partly)ISO/DIS 10218-1:2009 (Delvis)ISO/FDIS 10218-2:2010 (Delvis)ISO 13850:2006ISO 12100-1:2003ISO 12100-2:2003ISO 14121-1:2007ISO 3745:2003IEC 61000-6-2 ED 2.0:2005IEC 61000-6-4 ED 2.0:2006IEC 61131-2 ED 3.0:2007 (Delvis)EN ISO 13849-1:2008EN ISO 13849-1/AC:2009EN ISO 13849-2:2008EN ISO 10218-1:2009 (Delvis)prEN ISO 10218-1 (Delvis)FprEN ISO 10218-2:2010 (Delvis)EN ISO 13850:2008EN ISO 12100-1/A1:2009EN ISO 12100-2/A1:2009EN ISO 14121-1:2007EN ISO 3745:2009EN 61000-6-2:2005EN 61000-6-4:2007EN 61131-2:2007 (Delvis)EN 1037:1995
Anvendte generelle standarder ISO 9409-1:2004 (Delvis)(Ikke alle standarder er opført) ISO 9283:1999 (Delvis)
ISO 9787:2000 (Delvis)ISO 9946:2000 (Delvis)ISO 8373:1996 (Delvis)ISO/TR 14121-2:2007ISO 1101:2004ISO 286-1:2010ISO 286-2:2010IEC 60664-1 ED 2.0:2007IEC 60947-5-5:1997IEC 60529:1989+A1:1999EN ISO 9409-1:2004 (Delvis)EN ISO 9283:1999 (Delvis)EN ISO 9787:2000 (Delvis)EN ISO 9946:2000 (Delvis)EN ISO 8373:1996 (Delvis)EN ISO/TR 14121-2:2007EN ISO 1101:2005EN ISO 286-1:2010EN ISO 286-2:2010EN 60664-1:2007EN 60947-5-5:1998EN 60947-5-5/A1:2005EN 50205:2003EN 60529:1991+A1:2000
Bemærk at lavspændingsdirektivet ikke er nævnt. Maskindirektivet 2006/42/EC
83 UR-6-85-5-A
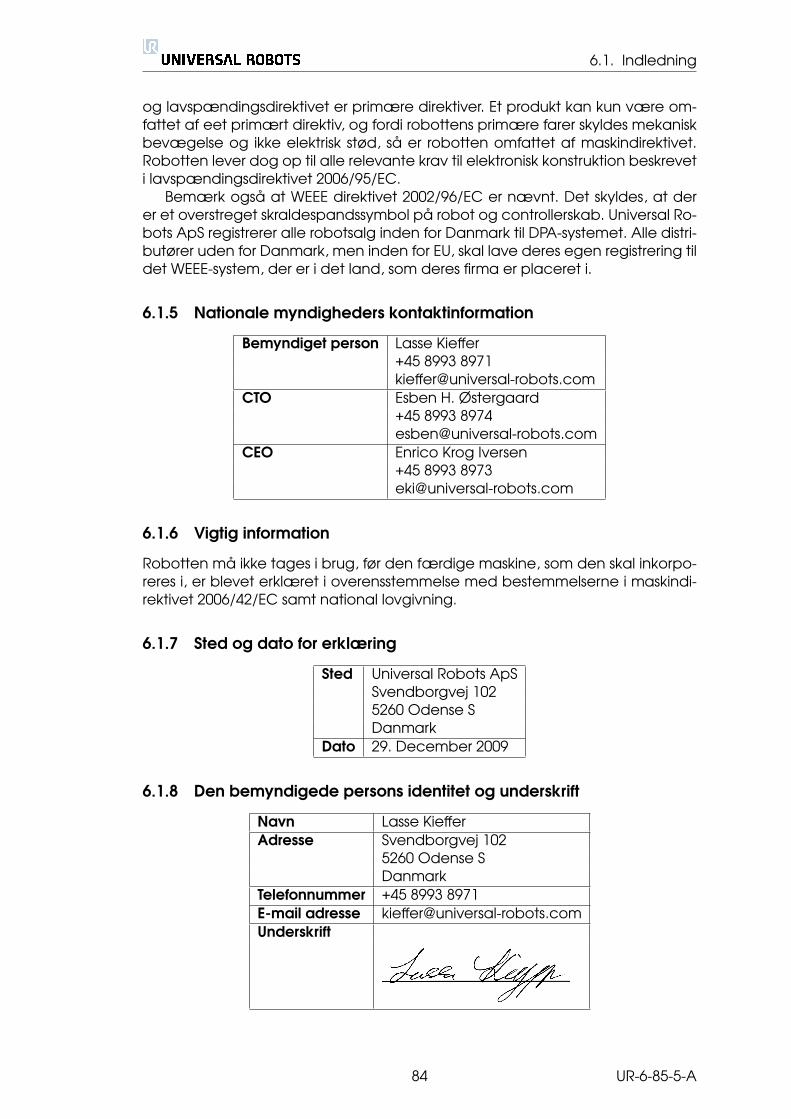
6.1. Indledning
og lavspændingsdirektivet er primære direktiver. Et produkt kan kun være om-fattet af eet primært direktiv, og fordi robottens primære farer skyldes mekaniskbevægelse og ikke elektrisk stød, sa er robotten omfattet af maskindirektivet.Robotten lever dog op til alle relevante krav til elektronisk konstruktion beskreveti lavspændingsdirektivet 2006/95/EC.
Bemærk ogsa at WEEE direktivet 2002/96/EC er nævnt. Det skyldes, at derer et overstreget skraldespandssymbol pa robot og controllerskab. Universal Ro-bots ApS registrerer alle robotsalg inden for Danmark til DPA-systemet. Alle distri-butører uden for Danmark, men inden for EU, skal lave deres egen registrering tildet WEEE-system, der er i det land, som deres firma er placeret i.
6.1.5 Nationale myndigheders kontaktinformation
Bemyndiget person Lasse Kieffer+45 8993 [email protected]
CTO Esben H. Østergaard+45 8993 [email protected]
CEO Enrico Krog Iversen+45 8993 [email protected]
6.1.6 Vigtig information
Robotten ma ikke tages i brug, før den færdige maskine, som den skal inkorpo-reres i, er blevet erklæret i overensstemmelse med bestemmelserne i maskindi-rektivet 2006/42/EC samt national lovgivning.
6.1.7 Sted og dato for erklæring
Sted Universal Robots ApSSvendborgvej 1025260 Odense SDanmark
Dato 29. December 2009
6.1.8 Den bemyndigede persons identitet og underskrift
Navn Lasse KiefferAdresse Svendborgvej 102
5260 Odense SDanmark
Telefonnummer +45 8993 8971E-mail adresse [email protected]
84 UR-6-85-5-A

Bilag A
Euromap67 Interfacet
A.1 Introduktion
Denne manual er beregnet til integrator. Det indeholder vigtige oplysninger omintegration, programmering, forstaelse og debugging
Forkortelser anvendt i denne manual er forklaret nedenfor..
Forkortelse BetydningUR Universal RobotsCB Controller Box
IMM Injection Moulding MachineMAF Moulding Area Free
A, B, C, ZA, ZB og ZC Signaler inden i euromap67 kablet
ADVARSEL: En IMM kan anvende op til 250V pa nogle af dets signaler. Forbindikke en IMM til euromap67 interfacet hvis det ikke er korrekt installeret i CB; her-under alle obligatoriske jordforbindelser.
BEMÆRK: Euromap67 understøttes kun pa CB produceret efter medio marts2011.
85
A.2. Robot og IMM integration
A.1.1 Euromap67 standard
Euromap67 standarden er gratis og kan downloades fra www.euromap.org. UReuromap67 modulet opfylder alle krav i denne standard, nar det tændes. Nardet er slukket, specificerer euromap67 standarden, at alle sikkerhedsrelateredesignaler skal være operative. Dette kan medføre farlige situationer og modsigersikkerhedsspecifikationerne i ISO 13849-1 og EN ISO 13849-1. Derfor abner UReuromap67 modulet nødstopsignalerne, MAFsignalerne og alle I/O signaler narcontrollerskabet slukkes.
Alle, afhængig af fabrikat, valgbare og reserverede I/O signaler understøttes.Interface i henhold til euromap67.1 er ogsa muligt.
A.1.2 CE
URs euromap67 interface er en del af det interne kredsløb i UR controllerska-bet, og det kan kun købes sammen med et UR controllerskab. UR euromap67interfacet hører derfor ind under inkorporeringserklæringen, som findes i dennebrugervejledning.
Interfacet er konstrueret med de samme komponenter og efter de sammeprincipper og testkrav, som controllerskabet. Derfor er der ingen ændringer tilinkorporeringserklæringen for robotten.
Sikkerhedsfunktionerne er PLd, kategori 3, i overensstemmelse med ISO 13849-1 og EN ISO 13849-1.
A.2 Robot og IMM integration
De følgende underafsnit indeholder vigtig information til integrator.
A.2.1 Nødstop og sikkerhedsstop
Nødstopsignalerne deles af robot og IMM. Dette betyder at et nødstop pa ro-botten ogsa stopper IMM og omvendt.
Sikkerhedsstopsignalerne (Sikkerhedsanordninger [ZA3-ZC3][ZA4-ZC4]) sik-rer at robotten sikkerhedsstoppes nar en dør pa IMM er aben. Bemærk at detikke er en del af euromap67 standarden at stoppe IMM hvis robotten sikkerheds-stoppes. Det betyder at hvis en operatør gar ind i robottens arbjedsradius, sa vilhan ikke have mulighed for at række ind i IMM uden at forarsage en situationmed sikkerhedsstop.
Hvis en sikkerhedsanordning skal sikkerhedsstoppe bade robotten og IMM,sa forbind den til IMM.BEMÆRK: Det specielle ”eksterne nødstop”input [EEA-EEB] kan anvendes tilat forbinde robotten med en tredje maskine. I det tlfælde vil kun robottennødstoppe hvis en nødstopknap aktiveres pa den tredje maskine, ikke IMM!
BEMÆRK: Kontroller altid funktionaliteten af de sikkerhedsrelaterede funktioner.
A.2.2 Tilslutning af et MAF lysværn
MAF signalet [A3-C3] i euromap67 kablet sikrer støbemaskinens kraftige bevæ-gelser. Pas pa at støbemaskinen ikke kan lukke nar robotten er inde i maskinen.
Euromap67 interfacet leveres uden et MAF lysværn. Det betyder, at en fejli robot-program vil kunne forarsage at IMM lukker om og knuser robotten. Mendet er muligt at tilslutte en lys vagt som vist nedenfor for at forhindre disse ulykker.
86 UR-6-85-5-A
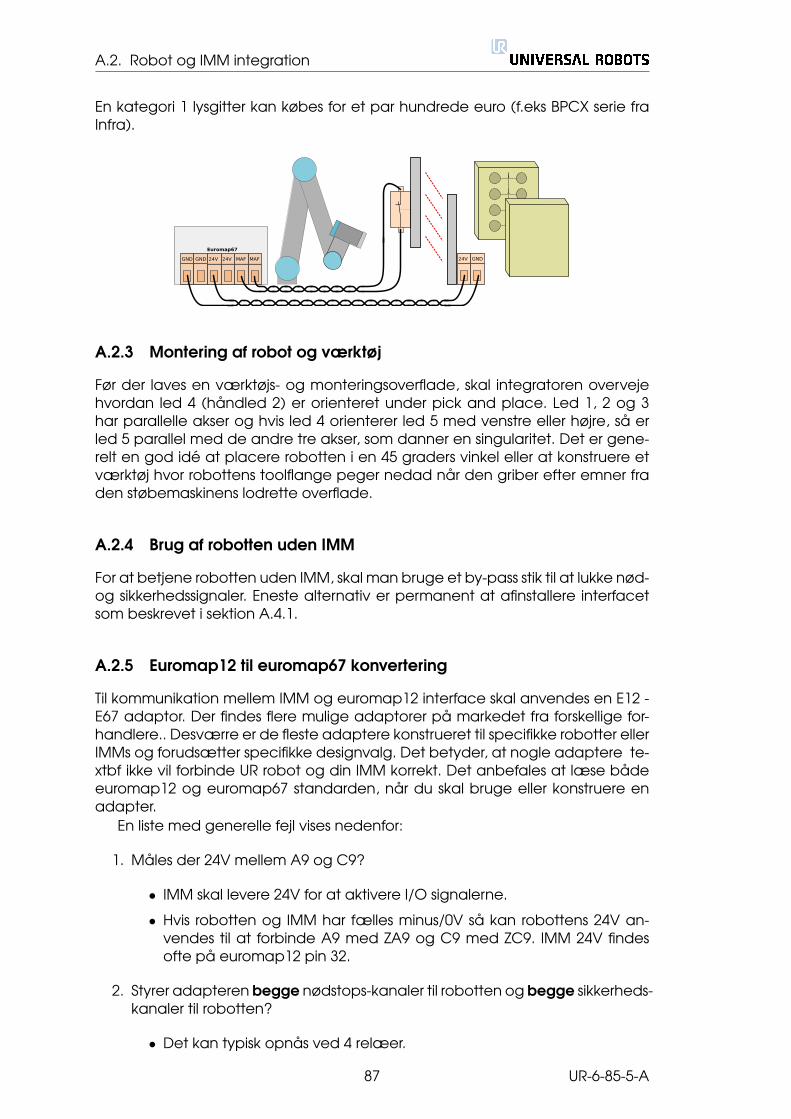
A.2. Robot og IMM integration
En kategori 1 lysgitter kan købes for et par hundrede euro (f.eks BPCX serie fraInfra).
24V GNDGND GND 24V 24V MAF MAF
Euromap67
A.2.3 Montering af robot og værktøj
Før der laves en værktøjs- og monteringsoverflade, skal integratoren overvejehvordan led 4 (handled 2) er orienteret under pick and place. Led 1, 2 og 3har parallelle akser og hvis led 4 orienterer led 5 med venstre eller højre, sa erled 5 parallel med de andre tre akser, som danner en singularitet. Det er gene-relt en god ide at placere robotten i en 45 graders vinkel eller at konstruere etværktøj hvor robottens toolflange peger nedad nar den griber efter emner fraden støbemaskinens lodrette overflade.
A.2.4 Brug af robotten uden IMM
For at betjene robotten uden IMM, skal man bruge et by-pass stik til at lukke nød-og sikkerhedssignaler. Eneste alternativ er permanent at afinstallere interfacetsom beskrevet i sektion A.4.1.
A.2.5 Euromap12 til euromap67 konvertering
Til kommunikation mellem IMM og euromap12 interface skal anvendes en E12 -E67 adaptor. Der findes flere mulige adaptorer pa markedet fra forskellige for-handlere.. Desværre er de fleste adaptere konstrueret til specifikke robotter ellerIMMs og forudsætter specifikke designvalg. Det betyder, at nogle adaptere te-xtbf ikke vil forbinde UR robot og din IMM korrekt. Det anbefales at læse badeeuromap12 og euromap67 standarden, nar du skal bruge eller konstruere enadapter.
En liste med generelle fejl vises nedenfor:
1. Males der 24V mellem A9 og C9?
• IMM skal levere 24V for at aktivere I/O signalerne.
• Hvis robotten og IMM har fælles minus/0V sa kan robottens 24V an-vendes til at forbinde A9 med ZA9 og C9 med ZC9. IMM 24V findesofte pa euromap12 pin 32.
2. Styrer adapteren begge nødstops-kanaler til robotten og begge sikkerheds-kanaler til robotten?
• Det kan typisk opnas ved 4 relæer.
87 UR-6-85-5-A
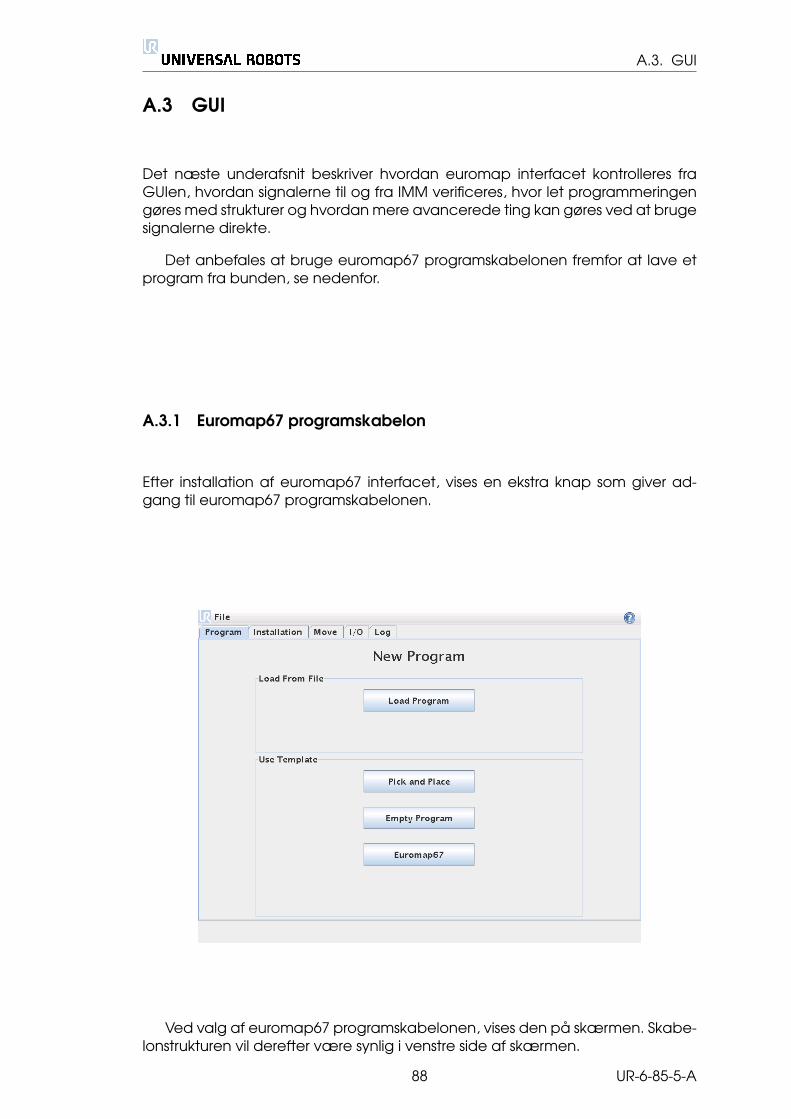
A.3. GUI
A.3 GUI
Det næste underafsnit beskriver hvordan euromap interfacet kontrolleres fraGUIen, hvordan signalerne til og fra IMM verificeres, hvor let programmeringengøres med strukturer og hvordan mere avancerede ting kan gøres ved at brugesignalerne direkte.
Det anbefales at bruge euromap67 programskabelonen fremfor at lave etprogram fra bunden, se nedenfor.
A.3.1 Euromap67 programskabelon
Efter installation af euromap67 interfacet, vises en ekstra knap som giver ad-gang til euromap67 programskabelonen.
Ved valg af euromap67 programskabelonen, vises den pa skærmen. Skabe-lonstrukturen vil derefter være synlig i venstre side af skærmen.
88 UR-6-85-5-A
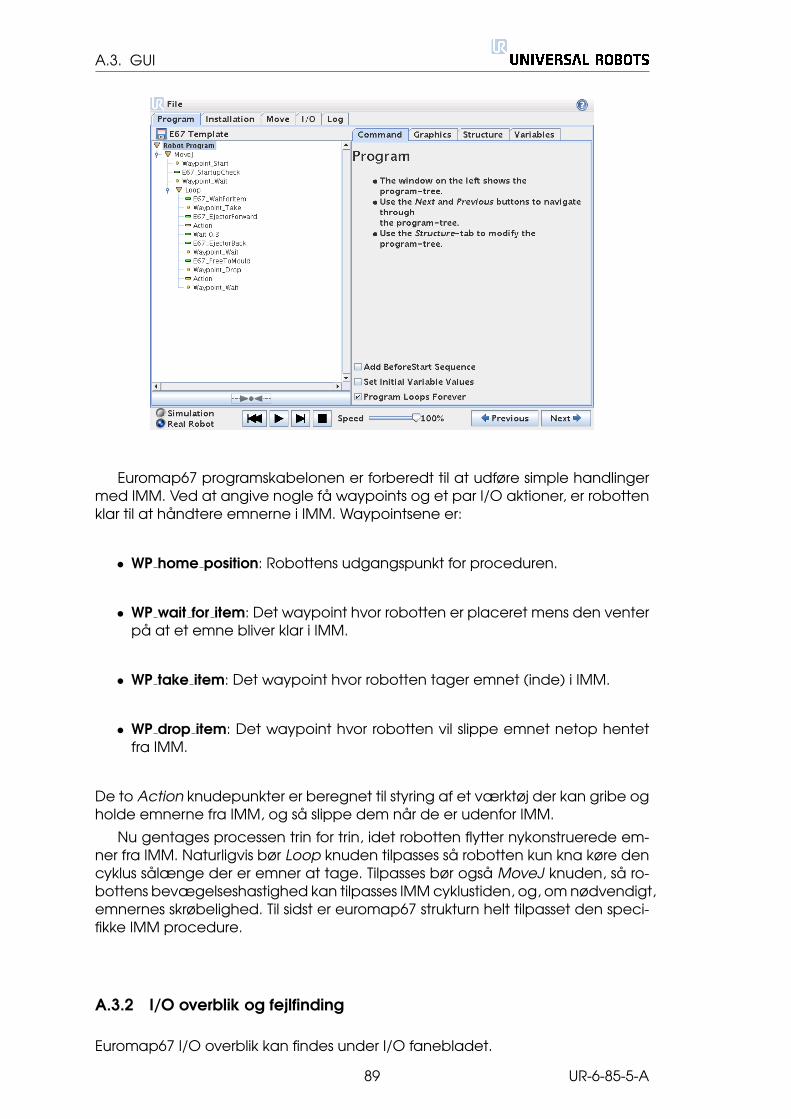
A.3. GUI
Euromap67 programskabelonen er forberedt til at udføre simple handlingermed IMM. Ved at angive nogle fa waypoints og et par I/O aktioner, er robottenklar til at handtere emnerne i IMM. Waypointsene er:
• WP home position: Robottens udgangspunkt for proceduren.
• WP wait for item: Det waypoint hvor robotten er placeret mens den venterpa at et emne bliver klar i IMM.
• WP take item: Det waypoint hvor robotten tager emnet (inde) i IMM.
• WP drop item: Det waypoint hvor robotten vil slippe emnet netop hentetfra IMM.
De to Action knudepunkter er beregnet til styring af et værktøj der kan gribe ogholde emnerne fra IMM, og sa slippe dem nar de er udenfor IMM.
Nu gentages processen trin for trin, idet robotten flytter nykonstruerede em-ner fra IMM. Naturligvis bør Loop knuden tilpasses sa robotten kun kna køre dencyklus salænge der er emner at tage. Tilpasses bør ogsa MoveJ knuden, sa ro-bottens bevægelseshastighed kan tilpasses IMM cyklustiden, og, om nødvendigt,emnernes skrøbelighed. Til sidst er euromap67 strukturn helt tilpasset den speci-fikke IMM procedure.
A.3.2 I/O overblik og fejlfinding
Euromap67 I/O overblik kan findes under I/O fanebladet.
89 UR-6-85-5-A
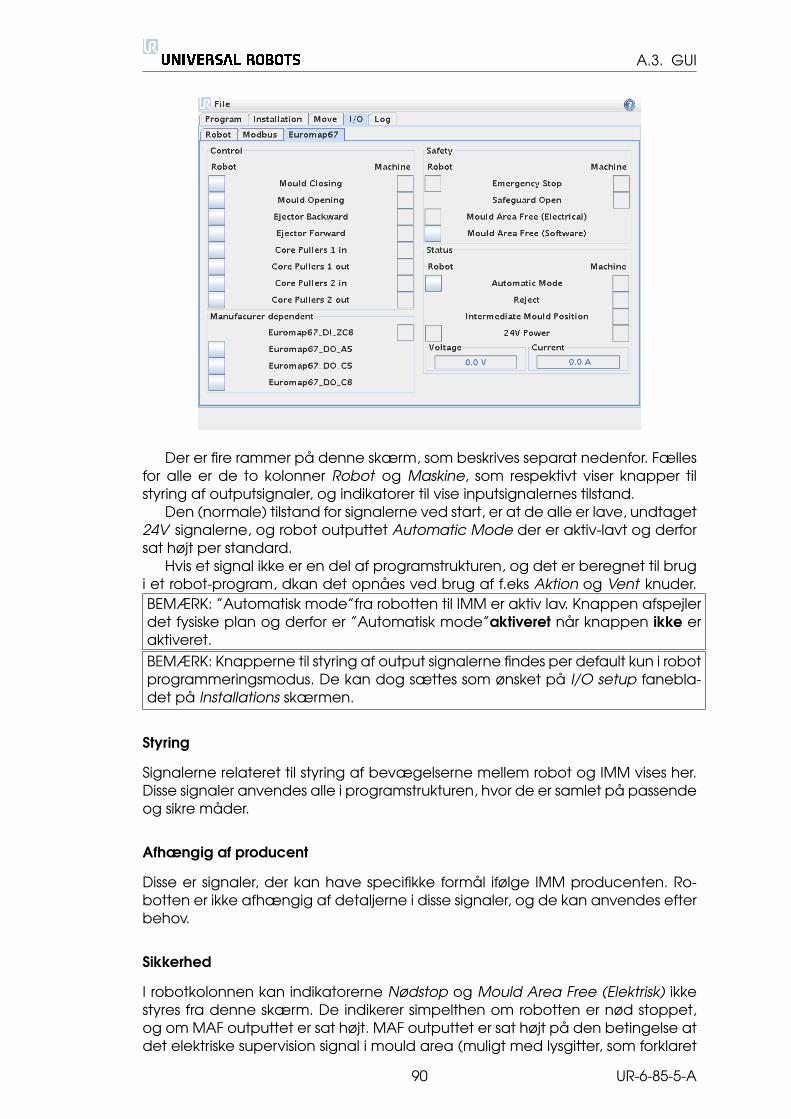
A.3. GUI
Der er fire rammer pa denne skærm, som beskrives separat nedenfor. Fællesfor alle er de to kolonner Robot og Maskine, som respektivt viser knapper tilstyring af outputsignaler, og indikatorer til vise inputsignalernes tilstand.
Den (normale) tilstand for signalerne ved start, er at de alle er lave, undtaget24V signalerne, og robot outputtet Automatic Mode der er aktiv-lavt og derforsat højt per standard.
Hvis et signal ikke er en del af programstrukturen, og det er beregnet til brugi et robot-program, dkan det opnaes ved brug af f.eks Aktion og Vent knuder.BEMÆRK: ”Automatisk mode”fra robotten til IMM er aktiv lav. Knappen afspejlerdet fysiske plan og derfor er ”Automatisk mode”aktiveret nar knappen ikke eraktiveret.BEMÆRK: Knapperne til styring af output signalerne findes per default kun i robotprogrammeringsmodus. De kan dog sættes som ønsket pa I/O setup fanebla-det pa Installations skærmen.
Styring
Signalerne relateret til styring af bevægelserne mellem robot og IMM vises her.Disse signaler anvendes alle i programstrukturen, hvor de er samlet pa passendeog sikre mader.
Afhængig af producent
Disse er signaler, der kan have specifikke formal ifølge IMM producenten. Ro-botten er ikke afhængig af detaljerne i disse signaler, og de kan anvendes efterbehov.
Sikkerhed
I robotkolonnen kan indikatorerne Nødstop og Mould Area Free (Elektrisk) ikkestyres fra denne skærm. De indikerer simpelthen om robotten er nød stoppet,og om MAF outputtet er sat højt. MAF outputtet er sat højt pa den betingelse atdet elektriske supervision signal i mould area (muligt med lysgitter, som forklaret
90 UR-6-85-5-A

A.3. GUI
ovenfor), og MAF signalet fra softwaren begge er høje. MAF signalet fra softwa-ren kan styres med den respektive knap. Nødstop signalet fra maskinen indikererom IMM er nødstoppet. Safeguard aben inputtet viser status pa signaler for ”Sik-kerhedsanordningerne”,specificeret i euromap67 standarden.
Status
Betjeningsmodus for robotten og IMM kan styres/ses (disse signaler anvendesogsa i programstrukturen). Felterne der viser spænding og strømforbrug repræ-senterer værdien der leveres til IMM og sandsynligvis et lysværn ved euromap67modulet.
A.3.3 Funktionalitet i programstrukturen
Der er syv programstrukturer, der kan vælges fra Struktur fanebladet pa pro-gramskærmen. Disse strukturer vil være til radighed nar eurompa67 interfaceter installeret korrekt (som forklaret i afsnit A.4). Et eksempel pa deres anvendelsekan ses i euromap67 programskabelonen.
Strukturerne er alle lavet for at opna ordentligt og sikkert samspil med IMM,og derfor indeholder de alle tests, der sikrer at signalerne er sat korrekt. DEsudenkan de sætte mere end et output, for at aktivere en handling.
Nar en programstruktur sættes ind i et robotprogram, kan det tilpasses vedat vælge strukturen i programmet og derefter klikke pa Kommando fanebladet.Alle programstrukturer bestar af et antal trin. De fleste trin er aktivere per default,og nogle kan ikke deaktiveres fordi de er essentielle for selve strukturen. Test tri-nene far programmet til at stoppe hvis testbetingelsen ikke opfyldes. Bade statusfor inputs og outputs kan testes. Sæt output trinene sætter et specifikt output tilenten høj eller lav. Vent til trinene bruges typisk til at vent til en bevægelse erfærdig før der fortsættes med yderligere trin og følgende programknuder.
91 UR-6-85-5-A
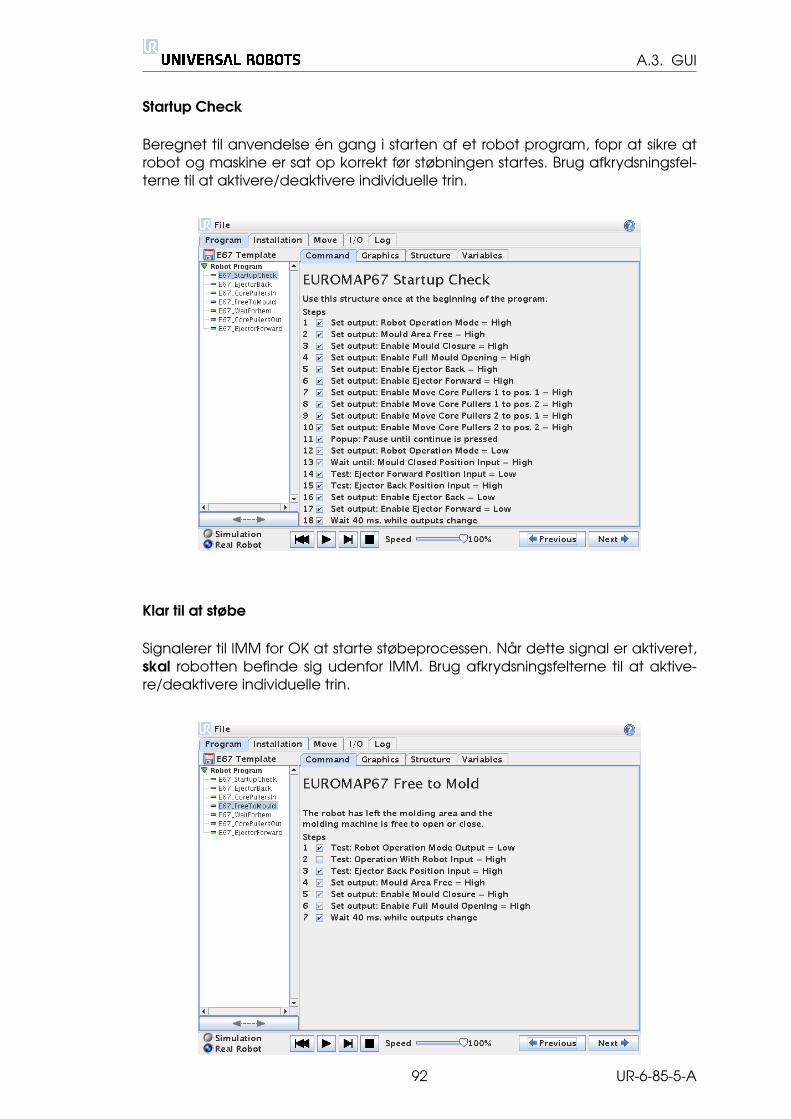
A.3. GUI
Startup Check
Beregnet til anvendelse en gang i starten af et robot program, fopr at sikre atrobot og maskine er sat op korrekt før støbningen startes. Brug afkrydsningsfel-terne til at aktivere/deaktivere individuelle trin.
Klar til at støbe
Signalerer til IMM for OK at starte støbeprocessen. Nar dette signal er aktiveret,skal robotten befinde sig udenfor IMM. Brug afkrydsningsfelterne til at aktive-re/deaktivere individuelle trin.
92 UR-6-85-5-A
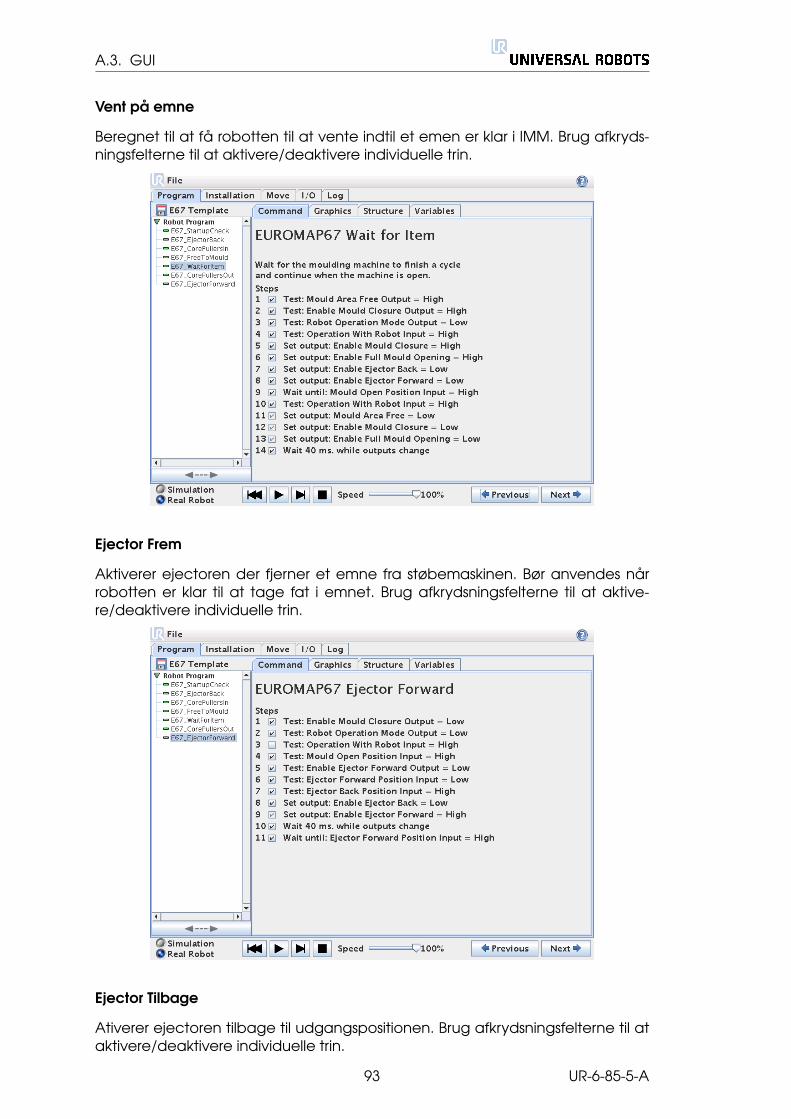
A.3. GUI
Vent pa emne
Beregnet til at fa robotten til at vente indtil et emen er klar i IMM. Brug afkryds-ningsfelterne til at aktivere/deaktivere individuelle trin.
Ejector Frem
Aktiverer ejectoren der fjerner et emne fra støbemaskinen. Bør anvendes narrobotten er klar til at tage fat i emnet. Brug afkrydsningsfelterne til at aktive-re/deaktivere individuelle trin.
Ejector Tilbage
Ativerer ejectoren tilbage til udgangspositionen. Brug afkrydsningsfelterne til ataktivere/deaktivere individuelle trin.
93 UR-6-85-5-A

A.3. GUI
Kærnetræk ind
Muliggør flytning af kærnetræk til position 1. De kærnetræk der skal anvendesvælges fra dropdown menuen. Brug afkrydsningsfelterne til at aktivere/deaktivereindividuelle trin.
Kærnetræk ud
Muliggør flytning af kærnetræk til position 2. De kærnetræk der skal anvendesvælges ra dropdown menuen. Brug afkrydsningsfelterne til at aktivere/deaktivereindividuelle trin.
94 UR-6-85-5-A

A.4. Installation og afinstallation af interfacet
A.3.4 I/O handling og vent
Ligesom robottens digitale outputs kan sættes til Handling -sknude, kan ogsaeuromap67 output signalerne. Nar euromap67 interfacet er installeret, vises sig-nalerne i menuerne hvor de kan vælges. Ligesadan kan euromap67 input signa-lerne, som robottens digitale inputs, anvendes til at styre programmets adfærdved at indsætte en Vent knude, der far programmet itl at vente indtil et input erenten højt eller lavt.
For avancerede brugere, kan et output sættes til en værdi for et specifiktudtryk. Sadanne udtryk kan indeholde bade inputs, outputs, variable, etc., ogkan anvendes til at opna kompleks programfunktionalitet. Ligeledes kan en Ventknude sættes til vent indtil værdien af et udtryk er sandt. Generelt vil euromap67signalerne alle være tilgængelige pa udtryksskærmen, hvilket betyder at dekan anvendes i alle sammenhænge hvor et udtryk kan vælges.
Signaler, der ikke er en del af euromap67 programstrukturen, skal enten sæt-tes eller læses ”manuelt”fra et program, ved at indsætte ekstra Handling, Vent,etc. knuder. Dette gælder f.eks. for forhandlerafhængige og reserverede sig-naler, der alle kan anvendes men ikke er vist pa euromap67 I/O fanebladet.Det betyder ogsa, at for at kunne bruge inputsene Afvis og Intermediate MouldOpening Position, skal skabelonprogrammet tilpasses og udvides.
Det anbefales IKKE at sætte Mould Area Free signalet manuelt, da det kanforarsage farlige situationer.
A.4 Installation og afinstallation af interfacet
For at opna redundans pa sikkerhedsfunktionaliteten, ved controllerskabet omdet skal forvente et euromap67 interface at være til stede eller ej. Derfor skalprocedurerne for installation og afinstallation følges præcist.
Bemærk venligst fladkablets orientering nedenfor.
95 UR-6-85-5-A
A.4. Installation og afinstallation af interfacet
BEMÆRK: Afbryd ikke fladkablet mens der er spænding pa controllerskabet!
A.4.1 Installation
Interfacet kan placeres i bunden eller i venstre side af controllerskabet, se bil-leder nedenfor og følg proceduren. Det er ikke tilladt at installere interfacet paanden made.
1. Sluk for controllerskabet.
• Det grønne lys i powerknappen pa teach pendant skal være slukket.
2. Monter interfacet.
• Brug 1 M6 møtrik til at skrue pa jordstikket.
• Brug 4 M4 x 8mm skruer til at skrue pa interfacet.
• Brug 4 M4 x 8mm skruer til at dække de tomme huller.
• Vend fladkablet korrekt nar du klikker det pa.
• Brug nogle fixing pads til at fastgøre fladkablet.
3. Tænd for controllerskabet.
• Interface registreres automatisk.
• Sikkerhedsfunktionaliteten er automatisk aktiveret.
• Sikkerhedssystemet genstarter
A.4.2 Afinstallation
Følg proceduren nedenfor.
1. Sluk for controllerskabet.
• Det grønne lys i powerknappen pa teach pendant skal være slukket.
2. Afmonter interfacet.
• Fjern fladkablet.
• Fjern M6 møtrikken fra jordstikket.
• Fjern alle M4 skruer fra den ydre side af controllerskabet.
3. Tænd for controllerskabet.
• Controllerskabet forbliver i opstartstilstand.
• Nogle advarsler kan forekomme.
4. Deaktiver sikkerhedsfunktionaliteten.
• Ga til Installation skærmen, vælg derefter fanebladet Indstillinger.
96 UR-6-85-5-A
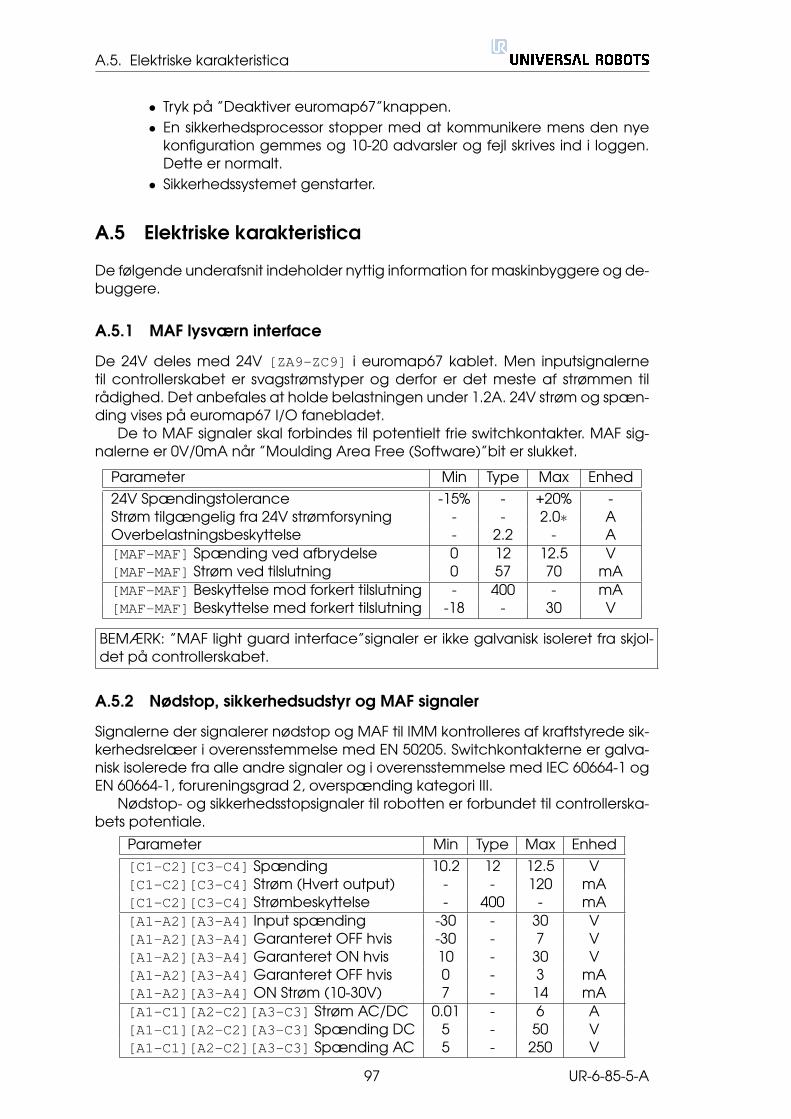
A.5. Elektriske karakteristica
• Tryk pa ”Deaktiver euromap67”knappen.• En sikkerhedsprocessor stopper med at kommunikere mens den nye
konfiguration gemmes og 10-20 advarsler og fejl skrives ind i loggen.Dette er normalt.
• Sikkerhedssystemet genstarter.
A.5 Elektriske karakteristica
De følgende underafsnit indeholder nyttig information for maskinbyggere og de-buggere.
A.5.1 MAF lysværn interface
De 24V deles med 24V [ZA9-ZC9] i euromap67 kablet. Men inputsignalernetil controllerskabet er svagstrømstyper og derfor er det meste af strømmen tilradighed. Det anbefales at holde belastningen under 1.2A. 24V strøm og spæn-ding vises pa euromap67 I/O fanebladet.
De to MAF signaler skal forbindes til potentielt frie switchkontakter. MAF sig-nalerne er 0V/0mA nar ”Moulding Area Free (Software)”bit er slukket.
Parameter Min Type Max Enhed24V Spændingstolerance -15% - +20% -Strøm tilgængelig fra 24V strømforsyning - - 2.0∗ AOverbelastningsbeskyttelse - 2.2 - A[MAF-MAF] Spænding ved afbrydelse 0 12 12.5 V[MAF-MAF] Strøm ved tilslutning 0 57 70 mA[MAF-MAF] Beskyttelse mod forkert tilslutning - 400 - mA[MAF-MAF] Beskyttelse med forkert tilslutning -18 - 30 V
BEMÆRK: ”MAF light guard interface”signaler er ikke galvanisk isoleret fra skjol-det pa controllerskabet.
A.5.2 Nødstop, sikkerhedsudstyr og MAF signaler
Signalerne der signalerer nødstop og MAF til IMM kontrolleres af kraftstyrede sik-kerhedsrelæer i overensstemmelse med EN 50205. Switchkontakterne er galva-nisk isolerede fra alle andre signaler og i overensstemmelse med IEC 60664-1 ogEN 60664-1, forureningsgrad 2, overspænding kategori III.
Nødstop- og sikkerhedsstopsignaler til robotten er forbundet til controllerska-bets potentiale.
Parameter Min Type Max Enhed[C1-C2][C3-C4] Spænding 10.2 12 12.5 V[C1-C2][C3-C4] Strøm (Hvert output) - - 120 mA[C1-C2][C3-C4] Strømbeskyttelse - 400 - mA[A1-A2][A3-A4] Input spænding -30 - 30 V[A1-A2][A3-A4] Garanteret OFF hvis -30 - 7 V[A1-A2][A3-A4] Garanteret ON hvis 10 - 30 V[A1-A2][A3-A4] Garanteret OFF hvis 0 - 3 mA[A1-A2][A3-A4] ON Strøm (10-30V) 7 - 14 mA[A1-C1][A2-C2][A3-C3] Strøm AC/DC 0.01 - 6 A[A1-C1][A2-C2][A3-C3] Spænding DC 5 - 50 V[A1-C1][A2-C2][A3-C3] Spænding AC 5 - 250 V
97 UR-6-85-5-A
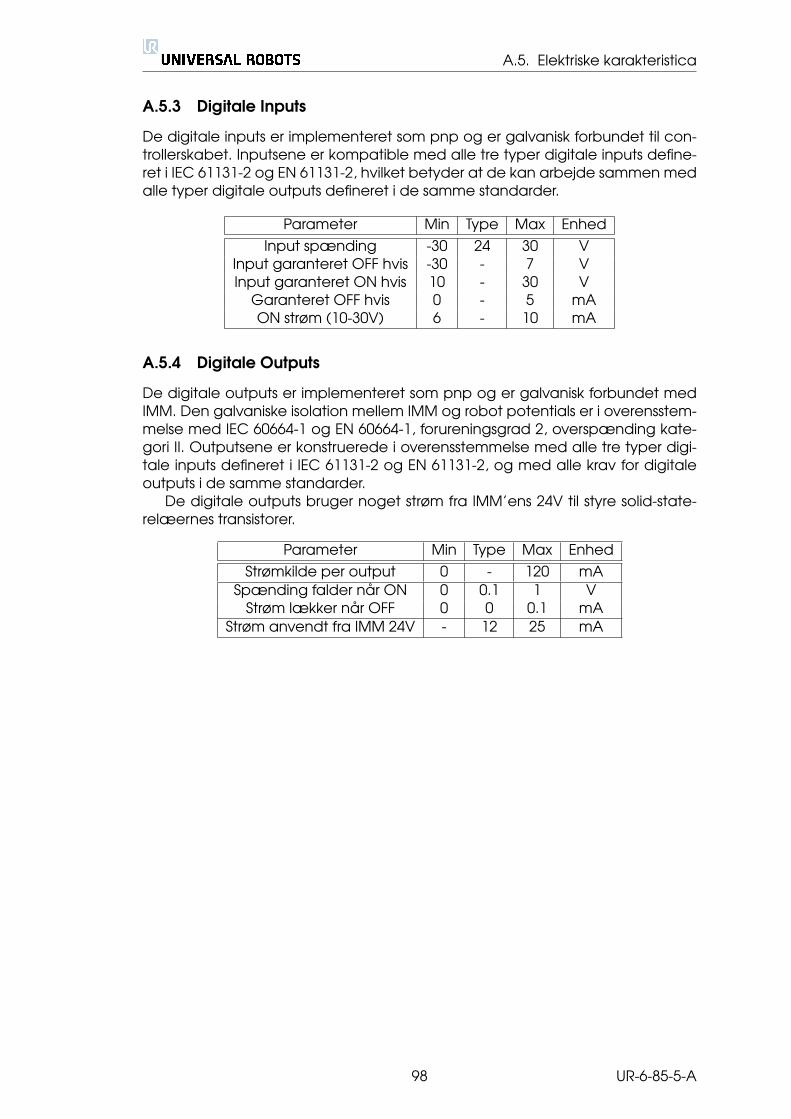
A.5. Elektriske karakteristica
A.5.3 Digitale Inputs
De digitale inputs er implementeret som pnp og er galvanisk forbundet til con-trollerskabet. Inputsene er kompatible med alle tre typer digitale inputs define-ret i IEC 61131-2 og EN 61131-2, hvilket betyder at de kan arbejde sammen medalle typer digitale outputs defineret i de samme standarder.
Parameter Min Type Max EnhedInput spænding -30 24 30 V
Input garanteret OFF hvis -30 - 7 VInput garanteret ON hvis 10 - 30 V
Garanteret OFF hvis 0 - 5 mAON strøm (10-30V) 6 - 10 mA
A.5.4 Digitale Outputs
De digitale outputs er implementeret som pnp og er galvanisk forbundet medIMM. Den galvaniske isolation mellem IMM og robot potentials er i overensstem-melse med IEC 60664-1 og EN 60664-1, forureningsgrad 2, overspænding kate-gori II. Outputsene er konstruerede i overensstemmelse med alle tre typer digi-tale inputs defineret i IEC 61131-2 og EN 61131-2, og med alle krav for digitaleoutputs i de samme standarder.
De digitale outputs bruger noget strøm fra IMM’ens 24V til styre solid-state-relæernes transistorer.
Parameter Min Type Max EnhedStrømkilde per output 0 - 120 mA
Spænding falder nar ON 0 0.1 1 VStrøm lækker nar OFF 0 0 0.1 mA
Strøm anvendt fra IMM 24V - 12 25 mA
98 UR-6-85-5-A





























