Embed Size (px)
Citation preview
UTILIZAÇÃO DA LÓGICA FUZZY NO POSICIONAMENTO
DINÂMICO DE UM VEÍCULO ROBÓTICO SUBMARINO
Marcelo Costa Tanaka, [email protected]
Josiane Maria de Macedo Fernandes, [email protected]
Wallace Moreira Bessa, [email protected] Universidade Federal do Rio Grande do Norte, Centro de Tecnologia, Departamento de Engenharia
Mecânica, Campus Universitário Lagoa Nova, CEP 59072-970, Natal, RN.
Resumo. Devido ao grande avanço tecnológico atingido nas últimas décadas, tornou-se possível a
utilização de veículos robóticos para exploração submarina. Estes veículos têm substituído os
mergulhadores na realização de tarefas que ofereçam risco à vida humana. Este trabalho descreve o
desenvolvimento de um sistema de posicionamento dinâmico para um veículo robótico submarino. A
estratégia de controle é baseada na técnica de controle não linear de linearização por realimentação com
compensação por lógica fuzzy. Resultados numéricos são apresentados com intuito de comprovar a
performance do sistema de controle. Palavras-chave: Controle Não Linear, Posicionamento Dinâmico, Veículo Robótico
Submarino, Linearização por Realimentação, Lógica Fuzzy.
1. INTRODUÇÃO
Veículos robóticos submarinos, também conhecidos como ROVs (Remotely Operated
underwater Vehicles), são muito utilizados em missões militares, pesquisas oceanográficas,
estudos da biologia e da arqueologia marinha, bem como na montagem, inspeção e reparo de
estruturas offshore. Durante a execução de uma determinada tarefa com o veículo submarino o
operador precisa monitorar e controlar uma série de parâmetros. Se alguns destes parâmetros,
como por exemplo a posição e a orientação do veículo, forem assistidos automaticamente por
um sistema de controle, a teleoperação do ROV pode ser incrivelmente facilitada. No entanto, o
comportamento dinâmico fortemente não linear desta classe de veículos torna desapropriada a
aplicação de metodologias clássicas de controle linear. O problema de desenvolvimento de sistemas de posicionamento preciso para veículos
robóticos submarinos tem atraído o interesse de muitos engenheiros e pesquisadores. O
crescente número de trabalhos nos últimos anos, dedicados ao posicionamento e orientação
destes veículos, confirmam a necessidade de se desenvolver um sistema eficiente e confiável,
capaz de lidar com as não linearidades da dinâmica do veículo e com incertezas típicas do
ambiente subaquático. Já foi demonstrado (Yuh, 1994; Goheen & Jeffreys, 1990) que, no caso
de veículos submarinos, as metodologias de controle tradicionais não são as mais adequadas e
também não garantem a performance do rastreamento da trajetória requerida. Linearização por realimentação (feedback linearization) é uma técnica de controle
utilizada em sistemas não lineares e que tem sido largamente empregada no meio acadêmico e
no ambiente industrial, principalmente na área de manipuladores robóticos, devido à
simplicidade na qual ela se apresenta. A ideia por trás desse método de controle consiste na
transformação algébrica do sistema dinâmico não linear, mediante uma lei de controle adequada,
em um sistema linear em malha fechada. Esta técnica também pode ser entendida como a
escolha de uma estratégia de controle que permita a transformação do sistema dinâmico original
em um sistema dinâmico equivalente, porém mais simples (Slotine & Li, 1991). Contudo, para
se ter bom desempenho é necessário ter um conhecimento preciso do sistema já que incertezas
comprometem a eficácia do controlador. Com base nisso, diversos esforços têm sido feito para combinar essa técnica com
algoritmos de inteligência artificial afim de melhorar seu desempenho diante incertezas e
imprecisões de modelagem. As estratégias mais comuns são baseados em lógica fuzzy
(Boukezzoula, et. al., 2007; Kang, et. al., 1998) e em redes neurais (Lu, et. al., 2006; Yesildirek

Utilização da lógica fuzzy no posicionamento dinâmico de um veículo robótico submarino 1100
& Lewis, 1995). Neste trabalho, será apresentado um controlador não linear para um veículo robótico
submarino com incertezas paramétricas. A estratégia de controle é baseada na metodologia de
controle não linear de linearização por realimentação aprimorada por um sistema de inferência
fuzzy com o objetivo de compensar efeitos indesejáveis provenientes da presença de parâmetros
incertos.
2. LINEARIZAÇÃO POR REALIMENTAÇÃO
Considere o sistema dinâmico não linear abaixo:
( ) ( ) ( ) ( ) (1)
onde [ ( )] é o vetor com as variáveis de estado, x(n)
é a n-ésima derivada da
variável de estado x, d representa as perturbações externas e imprecisões dinâmicas do modelo e
u a variável de entrada do sistema. As funções são não lineares e variantes no
tempo.
Considere agora o problema de rastreamento da trajetória 0 ( )
1, onde
o objetivo do controlador é fazer com que à medida que , ou seja, que para
, sendo [ ( )] definido como o erro de rastreamento. Com isso,
tendo o vetor de estados x disponível para ser medido, as funções f e b perfeitamente conhecidas,
e sendo b(x, t) diferente de zero, a lei de controle pode ser escrita como:
. ( )
( )/ (2)
onde a garantia de que para é adquirida desde que os coeficientes ki (i = 0, 1, …, n – 1) façam do polinômio
um polinômio de Hurwitz. Substituindo a lei de controle (2) no sistema dinâmico não linear (1) obtemos um sistema
em malha fechada cuja dinâmica é escrita da seguinte forma:
( ) ( ) (3)
onde é possível observar que, se o polinômio característico associado for um polinômio de
Hurwitz, o sistema dinâmico torna-se estável e garante a convergência exponencial a zero. No entanto, se d for diferente de zero, ou seja, as perturbações externas e possíveis
imprecisões de modelagem forem significativas, a lei de controle (2) não é suficiente para que o
erro de trajetória tenha sua convergência exponencial a zero. Com base neste problema, este
trabalho propõe uma estratégia de controle que alia a técnica de linearização por realimentação
com a lógica fuzzy formando uma espécie de compensação.
3. MODELO DINÂMICO DO VEÍCULO
O desenvolvimento de um modelo matemático que descreva com exatidão o movimento
de um veículo robótico submarino compreende tanto a dinâmica de corpo rígido referente ao
veículo em si, quanto a representação da dinâmica do fluido, um sistema tipicamente contínuo,
no qual o veículo está imerso. Enquanto a dinâmica de corpo rígido do veículo pode ser
representada por equações diferencias ordinárias (EDO), o meio fluido deve ser representado
por um sistema de equações diferenciais parciais (EDP). Para solução analítica ou numérica de um modelo com esse grau de complexidade, na
maioria dos artigos (Bessa et al., 2010, 2008; Antonelli, 2007; Hoang & Kreuzer, 2007;
Smallwood & Whitcomb, 2004; Hsu et al., 2000; Kiriazov et al., 1997; Yoerger & Slotine, 1985)
os modelos são baseados em parâmetros concentrados para representar de forma aproximada o
1101 Marcelo Costa Tanaka,Josiane Maria de Macedo Fernandes, Wallace Moreira Bessa
comportamento dinâmico do veículo. As equações de movimento do veículo robótico submarino podem ser representadas em
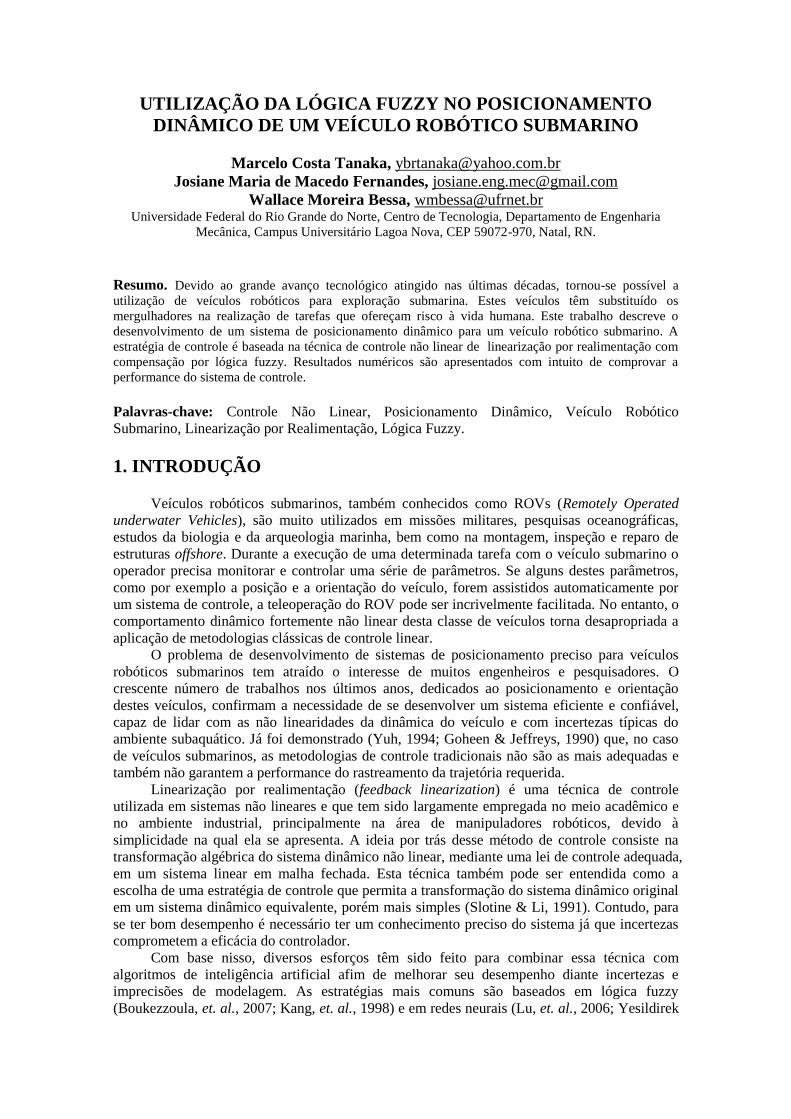
relação a um sistema de referência inercial ou a um sistema fixo ao corpo do veículo, Figura 1.
Com base nisso, as equações de movimento do veículo podem ser expressas, em relação ao
corpo rígido, da seguinte forma vetorial:
( ) ( ) ( ) (4)
onde [ ] é o vetor de velocidades linear e angular em relação ao sistema
fixo do corpo do veículo, , - representa a posição e orientação em relação ao
sistema inercial, M é a matriz de massa total (inércia do corpo rígido e massa adicional
hidrodinâmica), ( ) representa as forças de Coriolis e centrífugas, ( ) são as forças
decorrentes do amortecimento quadrático hidrodinâmico, ( ) é o vetor com as forças de
restauração (gravidade e flutuação), d representa eventuais perturbações provocadas pelas
correntes marinhas e é o vetor de forcas de controle gerada pelo sistema de propulsão.
Figura 1: Veículo submarino com sistemas de coordenadas inercial e de corpo rígido. É necessário ressaltar que no caso dos ROVs, o centro de gravidade é suficientemente
grande para a auto estabilização do ângulo de jogo (roll) e o ângulo de arfagem (pitch).
Este aspecto construtivo particular também permiti que o modelo dinâmico seja reduzido para 4
graus de liberdade , -, e o movimento vertical seja dissociado para o movimento no
plano horizontal. Esta simplificação pode ser encontrada na maioria dos trabalhos na literatura
especializada (Hoang & Kreuzer, 2007; Zanoli & Conte, 2003; Guo et al., 2003; Hsu et al.,
2000; Kiriazov et al., 1997; Pinto, 1996; Da Cunha et al., 1995; Yoerger & Slotine, 1985). Logo,
o sistema de posicionamento pode ser dividido em duas partes: controle de profundidade
(relacionado à variável z) e controle no plano XY (variáveis x, y e ). Outra consideração importante no caso dos ROVs é a perturbação causada pelo umbilical,
responsável pela comunicação do veículo com o computador na superfície. O elemento contínuo
umbilical pode ser discretizado por um método de elementos finitos ou modelado como um
sistema multi-corpo (Belivacqua et al., 1991; Pinto, 1996). No entanto, a adoção de algumas
destas aproximações requerem um grande esforço computacional o que seria inviável em uma
estimação instantânea (on-line) para gerar uma ação de controle. Um procedimento comum para
contornar essa limitação é considerar as forças de momento causadas pelas correntes ou pelas
correntes randômicas, e incorporá-las no vetor de perturbações d.
3.1 Efeitos hidrodinâmicos
Utilização da lógica fuzzy no posicionamento dinâmico de um veículo robótico submarino 1102
Considerando que as velocidades de operação dos veículos submarinos de operação
remota raramente excedem 2 m/s, os efeitos hidrodinâmicos (Fh) podem ser representados
usando a forma aproximada pela equação de Morison (Newman, 1986).
| | (5)
onde e são, respectivamente, a velocidade relativa e a aceleração relativa entre o corpo
rígido e o fluido, é a aceleração da corrente marinha, A representa a superfície de referência,
é a densidade do fluido, é o volume de água deslocado pelo veículo e CD e CM são
coeficientes a serem obtidos experimentalmente. O ultimo termo da Eq. (5) é conhecido como força de Froude-Krylov e não será levado
em consideração neste trabalho devido ao fato que nas profundidades normais de operação dos
veículos submarinos, a aceleração da correnteza pode ser desprezada. Desta forma, o coeficiente
do segundo termo pode então ser chamado de massa adicional hidrodinâmica. P primeiro
termo da equação representa a parcela relativa ao amortecimento quadrático hidrodinâmico.
Avaliações experimentais (Kleczka et al., 1992) mostram que a equação de Morison descreve
com boa precisão os efeitos hidrodinâmicos pelo movimento relativo de um corpo rígido em
relação a água.
3.1.1 Amortecimento quadrático O efeito hidrodinâmico ( ) sobre o veículo, devido não somente aos movimentos de
translação como também aos de rotação, pode ser expresso no sistema de coordenadas fixo ao
corpo por:
( )
[ | | | | | | | |] (6)
onde , , e dependem da geometria do veículo e devem ser obtidos
experimentalmente a partir de testes realizados em túnel de vento (Pinto, 1996), ou estimados
on line em um tanque de água através de algoritmos adaptativos (Smallwood & Whitcomb,
2003).
3.1.2 Massa adicional Devido à baixa velocidade de operação dos ROVs, a matriz de massa adicional
hidrodinâmica é fortemente dominada pelos termos da sua diagonal principal, podendo
então ser representada de forma aproximada por:
{ } (7)
Assim como no cálculo do amortecimento dinâmico, os coeficientes , , e
podem ser obtidos experimentalmente. A matriz pode ser adicionada à matriz de
inércia de corpo rígido, de modo a compor a matriz M da Eq. (4).
4. SISTEMA DE POSICIONAMENTO DINÂMICO
O controle de posição e orientação de veículos robóticos submarinos representa em sua
essência um problema de controle multivariável. No entanto, conforme já demonstrado (Slotine,
1983), a metodologia de controle a estrutura variável permite que controladores sejam
projetados isoladamente para cada grau de liberdade. Nas últimas décadas, estratégias
descentralizadas de controle têm sido aplicadas com sucesso no posicionamento dinâmico de
1103 Marcelo Costa Tanaka,Josiane Maria de Macedo Fernandes, Wallace Moreira Bessa
veículos submarinos (Sebastián & Soleto, 2007; Chatchanayuenyong & Parnichkun, 2007;
Smallwood & Whitcomb, 2004; Kiriazov et. al., 1997; Da Cunha et. al., 1995; Yoerger &
Slotine, 1985). Considerando que a lei de controle para cada grau de liberdade pode ser escrita em
relação ao referencial inercial, a Eq. (4) deve ser reescrita neste sistema de coordenadas. Lembrando que,
( ) (8)
onde J(x) é a matriz Jacobiana de transformação, que implica diretamente em,
( ) (9)
e,
˙ (10)
Portanto, as equações de movimento de um veículo submarino robótico, apresentadas
anteriormente no referencial fixo ao corpo, Eq. (4), podem então ser reescritas no referêncial
inercial:
(11)
onde , , , e .
Para o projeto de uma lei de controle descentralizada aproximada, a Eq. (11) pode ser
reescrita da seguinte forma:
¨ ( ) (12)
onde , , , e são as componentes , - de , , e respectivamente, representa os termos da diagonal principal de e os demais termos desta matriz são
incorporados ao vetor . Para simplificar a notação, o índice i será suprido da Eq. (12) e, desta forma, a equação de
movimento para cada grau de liberdade é dada por:
( ) (13)
Com base nisso, de acordo com a Eq. (2) lei de controle para a equação de movimento
para cada grau de liberdade pode ser definida por:
( ) (14)
5. ESTRATÉGIA DE COMPENSAÇÃO FUZZY
A compensação, baseada na teoria da lógica fuzzy, tem como objetivo contornar as
limitações da técnica de controle não linear adotada. Através do espaço de fase associado ao
erro obtido pela técnica de linearização por realimentação perante imprecisões do sistema, são
definidos os conjuntos difusos de entrada que, mediante uma calibração dos parâmetros de saída,
corrigem as imperfeições do sistema controlado. Os sistemas de inferência agregados a defuzzyficação são facilmente encontrados em
literatura especializada (Bojadziev, 1995; Jang et al., 1997; Passino & Yurkovich, 1998). Neste
trabalho o sistema de inferência difuso adotado para a compensação fuzzy foi o TSK ( Takagi –

Utilização da lógica fuzzy no posicionamento dinâmico de um veículo robótico submarino 1104
Sugeno – Kang) de ordem zero, com a regra rn determinada da seguinte forma:
Se é , é , … e ( ) é ( )
então ;
onde , e ( ) são conjuntos difusos, cujas funções de pertinência podem ser escolhidas da
melhor forma apropriada, e é o valor de saída para cada uma das regras fuzzy.
Considerando que cada regra define um valor numérico como saída , o valor final de
saída pode ser calculado por uma média ponderada:
( ) ∑
∑
(15)
ou similarmente,
( ) ( ) (16)
onde [ ] é o vetor que contém os valores de cada regra r, ( )
[ ] é um vetor cujas componentes ( ) ∑ ⁄ e é o valor de ativação
da premissa de cada regra que pode ser calculado a partir dos valores de pertinência com
qualquer interseção fuzzy (T-norma). Logo, a lei de controle com a compensação fuzzy pode ser declarada da seguinte forma:
. ( )
( )/ ( ) (17)
Desta forma, esta estratégia será aplicada ao veículo robótico submarino afim de
contornar os problemas causados pelas não linearidades do modelo, bem como presença de
parâmetros incertos.
6. RESULTADOS OBTIDOS
Para avaliar a performance da lei de controle proposta, foram realizados duas simulações
numéricas para a regulagem de profundidade de um veículo robótico submarino. No primeiro
caso, a lei de controle empregada utiliza somente a técnica de linearização por realimentação
sem a compensação fuzzy na presença de parâmetros incertos.
| | (
) (18)
A simulação para avaliar a desempenho do controlador foi realizada através da
implementação computacional numérica em linguagem C, com uma taxa de amostragem de 1
kHz para o simulador e 500 Hz para o controlador. Na solução numérica a equação diferencial
de 2ª ordem do modelo do ROV, Eq. (13), foi convertida em um sistema de duas equações de 1ª
ordem, de modo que pudessem ser simultaneamente resolvidas pelo método de Runge-Kutta de
4ª ordem. Os parâmetros adotados para o sistema do ROV foram , m²,
kg/m³, kg. No entanto, foi imposta uma variação de 25% nos parâmetros M e
CD, sendo os mesmos definidos por kg e , onde , (| | )-. O
parâmetro do controlador foi definido como e o estado inicial do sistema considerado
foi , - . As Figuras 2 e 3 mostram o rastreamento da trajetória desejada , ( )-m obtida com as Equações (13) e (14) destacando os efeitos da presença
de parâmetros incertos.
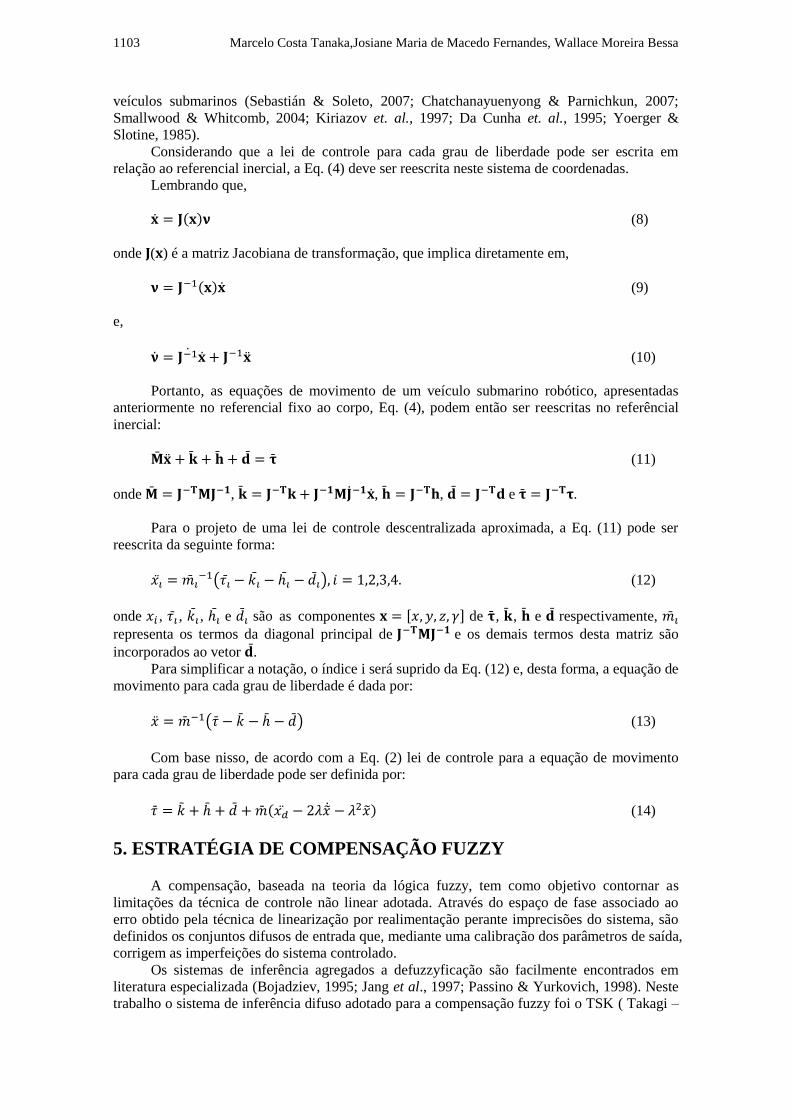
1105 Marcelo Costa Tanaka,Josiane Maria de Macedo Fernandes, Wallace Moreira Bessa
(a) Variável de estado x. (b) Variável manipulada .
Figura 2: Rastreamento da trajetória pelo método de linearização por realimentação na presença
de parâmetros incertos.
Como pode ser observado pela Figura 2 (a), o método de linearização por realimentação
não apresenta o rastreamento da trajetória de forma satisfatória na presença de parâmetros
incertos. Para enfatizar essa baixa performance do controlador a Figura 3 apresenta o
comportamento do erro da trajetória.
(a) Espaço de fase do erro. (b) Evolução do erro.
Figura 3: Comportamento do erro a trajetória na presença de parâmetros incertos.
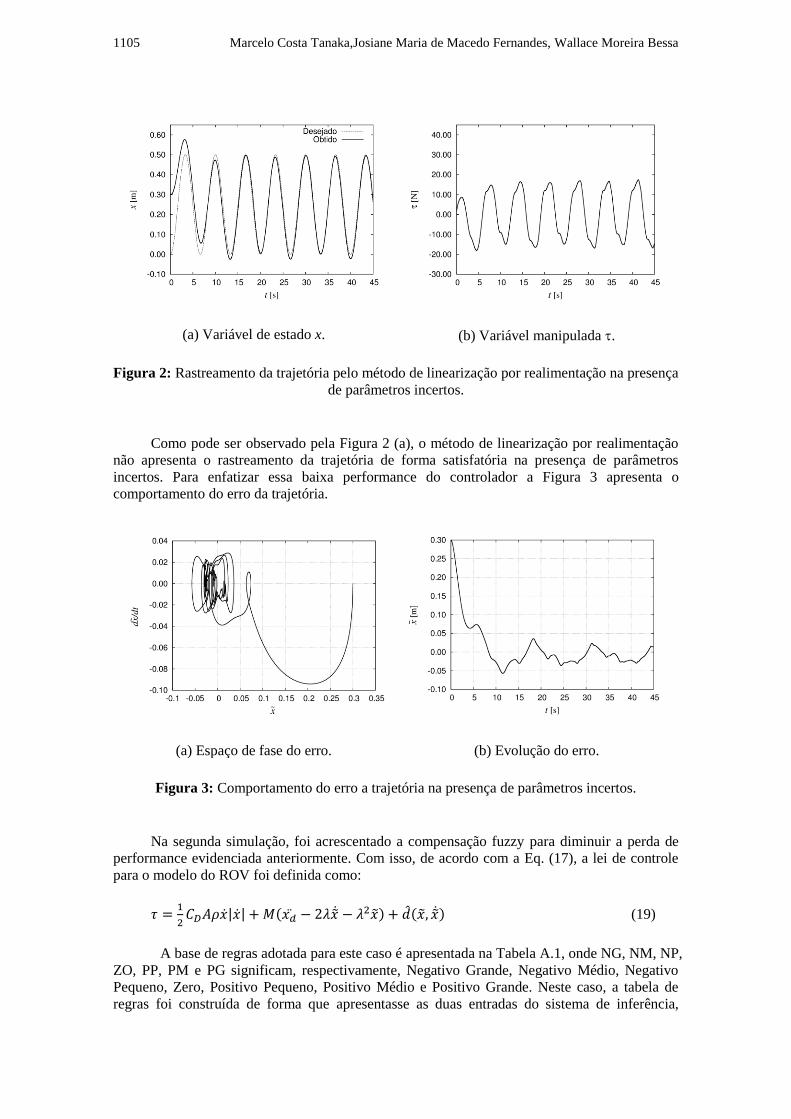
Na segunda simulação, foi acrescentado a compensação fuzzy para diminuir a perda de
performance evidenciada anteriormente. Com isso, de acordo com a Eq. (17), a lei de controle
para o modelo do ROV foi definida como:
| | (
) ( ) (19)
A base de regras adotada para este caso é apresentada na Tabela A.1, onde NG, NM, NP,
ZO, PP, PM e PG significam, respectivamente, Negativo Grande, Negativo Médio, Negativo
Pequeno, Zero, Positivo Pequeno, Positivo Médio e Positivo Grande. Neste caso, a tabela de
regras foi construída de forma que apresentasse as duas entradas do sistema de inferência,
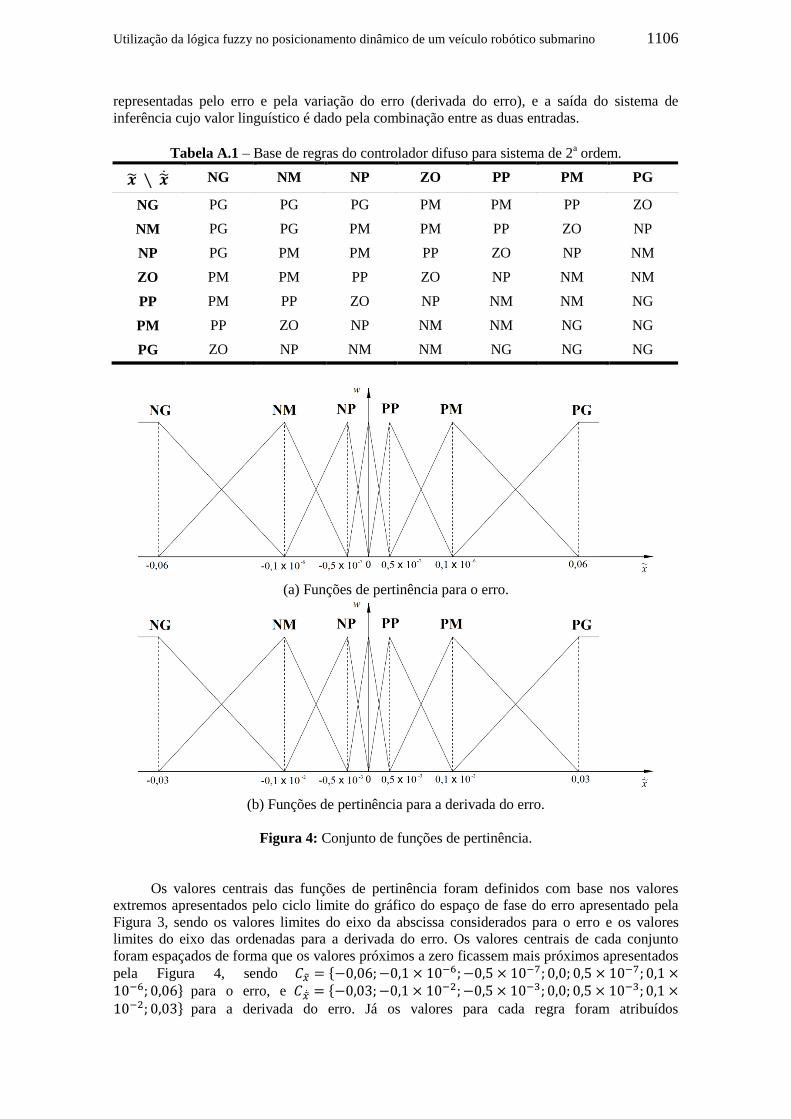
Utilização da lógica fuzzy no posicionamento dinâmico de um veículo robótico submarino 1106
representadas pelo erro e pela variação do erro (derivada do erro), e a saída do sistema de
inferência cujo valor linguístico é dado pela combinação entre as duas entradas.
Tabela A.1 – Base de regras do controlador difuso para sistema de 2a ordem.
NG NM NP ZO PP PM PG
NG PG PG PG PM PM PP ZO
NM PG PG PM PM PP ZO NP
NP PG PM PM PP ZO NP NM
ZO PM PM PP ZO NP NM NM
PP PM PP ZO NP NM NM NG
PM PP ZO NP NM NM NG NG
PG ZO NP NM NM NG NG NG
(a) Funções de pertinência para o erro.
(b) Funções de pertinência para a derivada do erro.
Figura 4: Conjunto de funções de pertinência.
Os valores centrais das funções de pertinência foram definidos com base nos valores
extremos apresentados pelo ciclo limite do gráfico do espaço de fase do erro apresentado pela
Figura 3, sendo os valores limites do eixo da abscissa considerados para o erro e os valores
limites do eixo das ordenadas para a derivada do erro. Os valores centrais de cada conjunto
foram espaçados de forma que os valores próximos a zero ficassem mais próximos apresentados
pela Figura 4, sendo *
+ para o erro, e *
+ para a derivada do erro. Já os valores para cada regra foram atribuídos
1107 Marcelo Costa Tanaka,Josiane Maria de Macedo Fernandes, Wallace Moreira Bessa
heuristicamente, onde os valores adotados de NG à PG foram
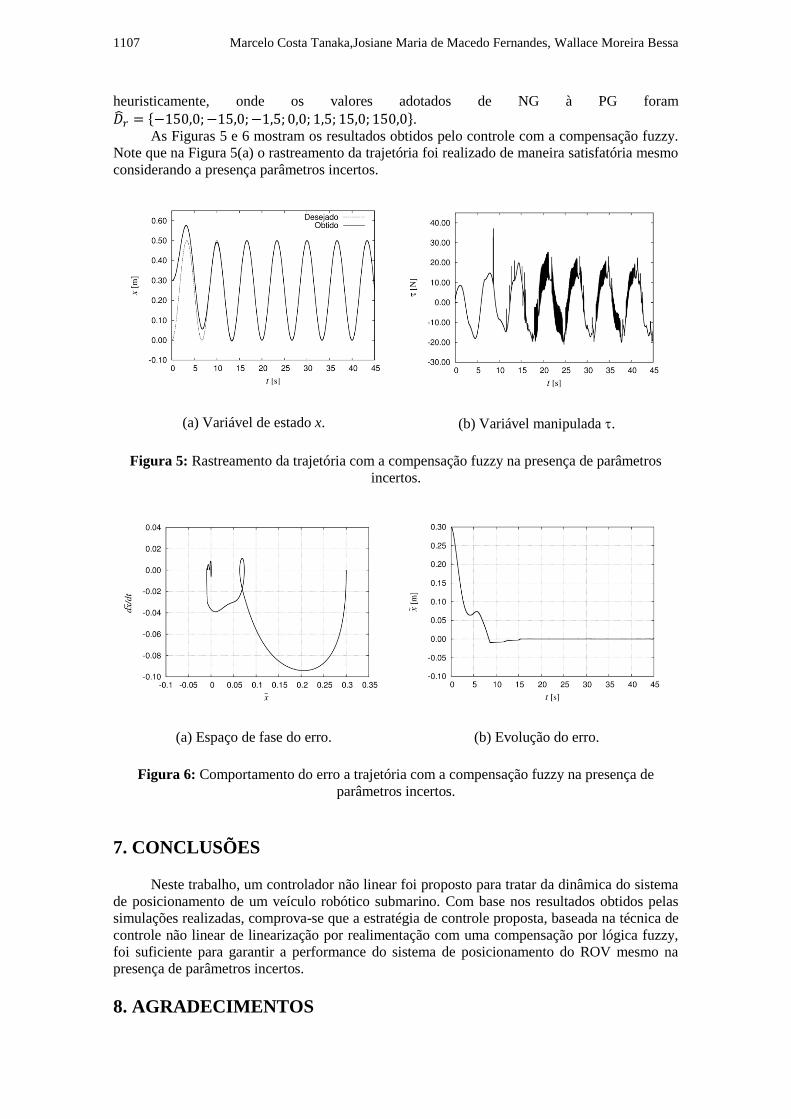
* +. As Figuras 5 e 6 mostram os resultados obtidos pelo controle com a compensação fuzzy.
Note que na Figura 5(a) o rastreamento da trajetória foi realizado de maneira satisfatória mesmo
considerando a presença parâmetros incertos.
(a) Variável de estado x. (b) Variável manipulada .
Figura 5: Rastreamento da trajetória com a compensação fuzzy na presença de parâmetros
incertos.
(a) Espaço de fase do erro. (b) Evolução do erro.
Figura 6: Comportamento do erro a trajetória com a compensação fuzzy na presença de
parâmetros incertos.
7. CONCLUSÕES
Neste trabalho, um controlador não linear foi proposto para tratar da dinâmica do sistema
de posicionamento de um veículo robótico submarino. Com base nos resultados obtidos pelas
simulações realizadas, comprova-se que a estratégia de controle proposta, baseada na técnica de
controle não linear de linearização por realimentação com uma compensação por lógica fuzzy,
foi suficiente para garantir a performance do sistema de posicionamento do ROV mesmo na
presença de parâmetros incertos.
8. AGRADECIMENTOS
Utilização da lógica fuzzy no posicionamento dinâmico de um veículo robótico submarino 1108
Os autores deste trabalho agradecem o apoio concedido pelo Conselho Nacional de
Desenvolvimento Científico e Tecnológico (CNPq), pela Coordenação de Aperfeiçoamento de
Pessoal de Nível Superior (CAPES), pelo Serviço Alemão de Intercâmbio Acadêmico (DAAD)
e pela Agência Nacional de Petróleo, Gás Natural e Biocombustível (ANP/PRH-14).
Referências
Antonelli, G., 2007. “On the use of adaptive/integral actions for six-degrees-of-freedom control
of autonomous underwater vehicles”. IEEE Journal of Oceanic Engineering, Vol. 32, No.
2, pp. 300-312. Bessa, W.M., Dutra, M.S. and Kreuzer, E., 2008. “Depth control of remotely operated
underwater vehicles using an adaptive fuzzy sliding mode controller”. Robotics and
Autonomous Systems, Vol. 56, No. 8, pp. 670-677. Bessa, W.M., Dutra, M.S. and Kreuzer, E., 2010. “An adaptive fuzzy sliding mode controller
for remotely operated underwater vehicles”. Robotics and Autonomous Systems, Vol. 58,
No. 1, pp. 16-26. Bevilacqua, L., Kleczca, W. and Kreuzer, E., 1991. “On the mathematical modeling of ROVs”.
In I. Troch, K. Desoyer and P. Kopacek, eds., Proceedings of the Symposium on Robot
Control. Vienna, Austria, pp. 595-598. Bojadziev, George and Bojadziev, Maria, 1995. “Fuzzy Sets, Fuzzy Logic, Aplications”.
Advances in fuzzy systems, Vol. 5, World Scientific, Singapore. Boukezzoula, R., Galichet, S., and Foulloy, L., 2007. “Fuzzy feedback linearizing controller and
its equivalence with the fuzzy nonlinear internal model control structure”. International
Journal of Applied Mathematics and Computer Science, 17(2):233-248. Chatchanayuenyong, T. and Parnichkun, M., 2007. “Neural network based-time optimal sliding
mode control for an autonomous underwater robot”. Mechatronics, Vol. 16, pp. 471-478. Da Cunha, J.P.V.S., Costa, R.R. and Hsu, L., 1995. “Design of a high performance variable
structure control of ROVs”. IEEE Journal of Oceanic Engineering, Vol. 20, No. 1, pp.
42-55. Guo, J., Chiu, F.C. and Huang, C.C., 2003. “Design of a sliding mode fuzzy controller for the
guidance and control of an autonomous underwater vehicle”. Ocean Engineering, Vol. 30,
pp. 2137-2155. Hoang, N.Q. and Kreuzer, E., 2007. “Adaptive PD-controller for positioning of a remotely
operated vehicle close to an underwater structure: theory and experiments”. Control
Engineering Practice, Vol. 15, pp. 411-419. Hsu, L., Costa, R.R., Lizarralde, F. and Da Cunha, J.P.V.S., 2000. “Dynamic positioning of
remotely operated underwater vehicles”. IEEE Robotics and Automation Magazine, Vol.
7, No. 3, pp. 21-31. Kiriazov, P., Kreuzer, E. and Pinto, F.C., 1997. “Robust feedback stabilization of underwater
robotic vehicles”. Robotics and Autonomous Systems, Vol. 21, pp. 415-423.
1109 Marcelo Costa Tanaka,Josiane Maria de Macedo Fernandes, Wallace Moreira Bessa
Jang, J. S. R.; Sun, C. T.; Mizutani, E., 1997. “Neuro Fuzzy and Soft Computing: A
Computational Approach to Learning and Machine Intelligence”. New Jersey: Prentice
Hall, 1997. Kang, H.-J., Kwon, C., Lee, H., and Park, M., 1998. “Robust stability analysis and design
method for the fuzzy feedback linearization regulator”. IEEE Transactions on Fuzzy
Systems, 6(4):464- 472. Kleczka, W., Kreuzer, E. and Pinto, F.C., 1992. “Analytic-numeric study of a submerged double
pendulum”. In M.P. Paido ussis and M.K. Au-Yang, eds., Internetional Symposium on
Flow-Induced Vibration and Noise. Anaheim, USA. Lu, Z., Shieh, L.-S., Chen, G., and Coleman, N. P., 2006. “Adaptive feedback linearization
control of chaotic systems via recurrent high-order neural networks”. Information
Sciences, 176:2337 – 2354. Newman, J.N., 1986. Marine Hydrodynamics. MIT Press, Massachusetts, 5th edition. Passino, Kevin M. and Yurkovich, Stephen, 1998. “Fuzzy Control”, Addison Wesley Longman,
Inc., USA. Pinto, F.C., 1996. Theoretische und experimentelle Untersuchung zur Sensorik und Regelung
von Unterwasserfahrzeugen. VDI Verlag, Düsseldorf. Sebastian, E. and Sotelo, M.A., 2007. “Adaptive fuzzy sliding mode controller for the kinematic
variables of an underwater vehicle”. Journal of Intelligent and Robotic Systems, Vol. 49,
pp. 189-215. Slotine, J.J.E. And Li, W., 1991. Applied Nonlinear Control. Prentice Hall, New Jersey. Smallwood, D.A. and Whitcomb, L.L., 2004. “Model-based dynamic positioning of underwater
robotic vehicles: Theory and experiment”. IEEE Journal of Oceanic Engineering, Vol. 29,
No. 1, pp. 169-186. Yoerger, D.R. and Slotine, J.J.E., 1985. “Robust trajectory control of underwater vehicles”.
IEEE Journal of Oceanic Engineering, Vol. 10, No. 4, pp. 462-470. Yuh, J., 1994. “Learning control for underwater robotic vehicles”. IEEE Control Systems
Magazine, Vol. 14, No. 2, pp. 39-46. Zanoli, S.M. and Conte, G., 2003. “Remotely operated vehicle depth control”. Control
Engineering Practice, Vol. 11, pp. 453-459.