Embed Size (px)
DESCRIPTION
ALGORITMOS GENÉTICOS
Citation preview

UNIVERSIDADE ANHANGUERA/UNIDERP
Curso de Administração
WESLEY OSVALDO PRADELLA RODRIGUES
UTILIZAÇÃO DOS ALGORITMOS GENÉTICOS COMO
FERRAMENTA DE OTIMIZAÇÃO EM PROBLEMAS DE
ROTEIRIZAÇÃO
Campo Grande – MS
Novembro, 2010

WESLEY OSVALDO PRADELLA RODRIGUES
UTILIZAÇÃO DOS ALGORITMOS GENÉTICOS COMO
FERRAMENTA DE OTIMIZAÇÃO EM PROBLEMAS DE
ROTEIRIZAÇÃO
Trabalho final de graduação apresentado como
requisito para colação de grau no Curso de
Graduação em Administração da Universidade
Anhaguera/Uniderp, turma N81, sob a orientação
do Prof˚ Mestre Roberti Andre da Silva Filho e co-
orientação do Prof˚ Doutor Celso Correia de
Souza.
Campo Grande – MS
Novembro, 2010

O trabalho final de graduação intitulado “Utilização dos Algoritmos Genéticos como
Ferramenta de Otimização em Problemas de Roteirização” apresentada por Wesley Osvaldo
Pradella Rodrigues como requisito para colação de grau no curso de Graduação em
Administração à Banca Examinadora da Anhanguera – Uniderp, obteve conceito ________
para aprovação.
BANCA EXAMINADORA
___________________________________________________
Prof˚ Mestre Roberti Andre da Silva Filho
___________________________________________________
Prof˚ Doutor Celso Correia de Souza.
___________________________________________________
Campo Grande – MS, ____ de ___________________ de 2010

Dedico aos pais, assim como para
minha namorada pelo incentivo
constante e amor a mim concedido.

AGRADECIMENTO
Agradeço, primeiramente e acima de tudo a Deus, o ser que por mim tudo executa, que
me guiou e protegeu para eu chegar até aqui.
A meus pais queridos Osvaldo e Teresinha, por terem dados força, incentivo e
constante amor em todos os momentos da minha vida. Sempre me motivando , orientando e
conforme suas possibilidades investindo em minha educação. Desejo honrá-los e agradecê-los
por tudo.
A minha namorada, pelo companheirismo, carinho, amizade e compreensão, sempre
acreditando e me incentivando para a conclusão deste trabalho.
Aos meus amigos por me apoiarem e me ajudarem ao longo do curso, especialmente
aos meus colegas de Iniciação Científica e aos professores do NEPES.
A todos os professores que contribuíram para minha formação acadêmica, em especial
ao Professor Roberti Andre da Silva Filho, meu orientador, ao professor Celso Correia de
Souza, meu co-orientador, e ao Professor Jose Francisco dos Reis Neto, por me dirigirem aos
caminhos da pesquisa e por me guiarem para a realização deste trabalho.

We are continually faced by great opportunities
brilliantly disguised as insoluble problems.
Lee Iacoc

RESUMO
O sucesso de qualquer operação Logística depende fundamentalmente do planejamento
econômico, rigoroso e bem estruturado, para facilitar as tomadas de decisões. No caso da
Roteirização de veículos ou Programação de entregas o seu sucesso depende
fundamentalmente da agilidade na entrega de produtos ou serviços, na redução de distâncias e
na minimização dos custos operacionais em um roteiro de entrega, o planejamento é o
principal instrumento no qual o gestor de se basear para tomar as suas decisões. Os modelos
matemáticos são os grandes aliados do gestor para a minimização de custos operacionais,
simulando situações idealizadas através de modelos matemáticos, que não poderiam ser
facilmente testadas no decorrer das operações de distribuição, mas que são fundamentais nas
tomadas de decisões. A técnica dos Algoritmos Genéticos, modelo matemático pertencente às
meta-heurísticas, é eficiente na busca de soluções otimizadas, ou aproximadamente ótimas,
numa grande variedade de problemas, dado que não possuem as diversas das limitações
encontradas nos métodos tradicionais de busca. Nesse trabalho de pesquisa utilizou-se a
técnica dos Algoritmos Genéticos na otimização de um roteiro de distribuição de bebidas de
uma empresa fictícia situada na cidade de Campo Grande – MS, visando obter a melhor rota
de distribuição com o menor custo/distância entre o centro de distribuição e os clientes. Os
resultados foram considerados muito bons visto que foi possível otimizar a rota de
distribuição de bebidas, obtendo o menor custo/distância possível para a ótima execução do
processo, evidenciando a eficiência dos Algoritmos Genéticos como ferramenta de otimização
no auxilio da tomada de decisão.
Palavras-chave: Algoritmos genéticos, Roteirização de veículos, otimização, tomada de
decisão.

LISTA DE FIGURAS
Figura 1 – Distância reduzida através da melhoria de roteiro. ................................................ 22
Figura 2 – Fluxograma da solução de problemas de otimização com Algoritmos Genéticos. 27
Figura 3 – Representação do processo de seleção via roleta. .................................................. 32
Figura 4 – Representação de cruzamento de um ponto de corte. ............................................ 35
Figura 5 – Representação de cruzamento de dois pontos de corte. ......................................... 35
Figura 6 – Exemplo de dois pais de cromossomos.................................................................. 36
Figura 7 – Escolha do ponto de corte no cruzamento PMX. ................................................... 36
Figura 8 – Preenchimento do cromossomo filho no cruzamento PMX. ................................. 37
Figura 9 – Completando o cromossomo filho no cruzamento PMX. ...................................... 37
Figura 10 – Exemplo de dois pais de cromossomos................................................................ 39
Figura 11 – Escolha do ponto de corte no cruzamento OX. .................................................... 39
Figura 12 – Completando o cromossomo filho no cruzamento PMX. .................................... 40
Figura 13 – Operação com operador de mutação EM ............................................................. 41
Figura 14 – Operação com operação de mutação SIM............................................................ 42
Figura 15 – Operação com operador de mutação SM ............................................................. 42
Figura 16 – Localização dos clientes no plano cartesiano. ..................................................... 47
Figura 17 – Trecho da população inicial gerada no software Matlab. .................................... 47
Figura 18 – Representação da 1º rota possível no plano cartesiano. ....................................... 48

Figura 19 – Trecho da população inicial, contendo o cálculo das distâncias, gerada no
software Matlab. ....................................................................................................................... 49
Figura 20 – Trecho da operação de elitismo no software Matlab. .......................................... 50
Figura 21 – Trecho da operação de cruzamento PMX no software Matlab. ........................... 51
Figura 22 – Trecho da operação de mutação EM no software Matlab. ................................... 52
Figura 23 – Trecho população final gerada no software Matlab. ............................................ 54
Figura 24 – Representação da rota com menor custo no plano cartesiano. ............................. 55
Figura 25 – Representação de uma possível rota encontra pelo Algoritmo Genético. ........... 57
Figura 26 – Representação de uma possivel rota encontra pelo Algoritimo Genético. .......... 58
Figura 27 – Representação de uma possivel rota encontra pelo Algoritimo Genético. .......... 58
Figura 28 – Melhor rota encontrada pelo Algoritimo Genético. ............................................. 59

LISTA DE TABELAS
Tabela 1 – Terminologia dos Algoritmos Genéticos ............................................................... 29
Tabela 2 – Dimensão do espaço de busca em função do número de cidades no problema do
caixeiro viajante. ....................................................................................................................... 31
Tabela 3 – Tabela das distâncias calculadas ............................................................................ 46

LISTA DE GRÁFICOS
Gráfico 1 – Relação Custos x Interação na resolução na resolução do problema ................... 56

i
SUMÁRIO
RESUMO .................................................................................................................................. iii
LISTA DE FIGURAS .............................................................................................................. iv
LISTA DE TABELAS ............................................................................................................. vi
LISTA DE GRÁFICOS ......................................................................................................... vii
1 INTRODUÇÃO ..................................................................................................................... 1
1.1 OBJETIVO GERAL ............................................................................................................. 2
1.2 OBJETIVO ESPECÍFICO .................................................................................................... 2
2 FUNDAMENTAÇÃO TEÓRICA ........................................................................................ 3
2.1 LOGÍSTICA EMPRESARIAL ............................................................................................ 3
2.1.1 Definição de logística ................................................................................................. 3
2.1.2 Origem do termo logística .......................................................................................... 5
2.1.3 Atividades da logística ............................................................................................... 5
2.2 TRANSPORTE .................................................................................................................... 8
2.2.1 Escolha dos modais .................................................................................................. 12
2.2.2 Tipos de modais ....................................................................................................... 13
2.3 ROTEIRIZAÇÃO DE VEÍCULOS ................................................................................... 17
2.3.1 Princípios básicos de roteirização e programação de veículos ................................ 18
2.3.2 Roteirização sem restrições ...................................................................................... 19
2.3.3 Roteirização com restrições ..................................................................................... 20

ii
2.3.4 Métodos de Melhoria de Roteiros ............................................................................ 25
2.4 ALGORITMOS GENÉTICOS NA RESOLUÇÃO DE PROBLEMAS DE
ROTEIRIZAÇÃO ..................................................................................................................... 25
2.4.1 Representação de soluções possiveis (cromossomos) .............................................. 27
2.4.2 Terminologia ............................................................................................................ 29
2.4.3 Função de avaliação ................................................................................................. 30
2.4.4 Escolha da população inicial .................................................................................... 30
2.4.5 Seleção ..................................................................................................................... 31
2.4.6 Elitismo .................................................................................................................... 33
2.4.7 Operadores genéticos ............................................................................................... 33
2.4.8 Crossover .................................................................................................................. 34
2.4.9 Mutação .................................................................................................................... 41
3 METODOLOGIA ................................................................................................................ 43
3.1 CARACTERISTICA DA PESQUISA ............................................................................... 44
3.2 INSTRUMENTOS DE COLETA DE DADOS ................................................................. 44
3.3 INSTRUMENTOS PARA TRATAMENTO E ANÁLISE DE DADOS .......................... 44
4. O CASO EM ESTUDO ...................................................................................................... 45
4.1 INICIAR ............................................................................................................................. 45
4.2 GERAR A POPULAÇÃO INICIAL .................................................................................. 47
4.3 FUNÇÃO DOS CUSTOS/DISTÂNCIA ............................................................................ 48
4.4 SELEÇÃO .......................................................................................................................... 49
4.5 ELITISMO ......................................................................................................................... 49
4.6 CRUZAMENTO ................................................................................................................ 50
4.7 MUTAÇÃO ........................................................................................................................ 51
5 APRESENTAÇÃO DOS DADOS ...................................................................................... 53
5.1 MELHOR ROTA ............................................................................................................... 53

iii
6 ANALISE DOS DADOS ..................................................................................................... 56
7 CONCLUSÃO ...................................................................................................................... 60
REFERÊNCIAS ..................................................................................................................... 61

1
1 INTRODUÇÃO
A utilização de ferramentas computacionais na distribuição física já bastante
conhecida, devido a necessidade de obter produtividade e rentabilidade. A necessidade de
implementação de novas técnicas, equipamentos e recursos que beneficiem o planejamento e
o processo decisório ocorrem em razão do aumento da competitividade no setor.
A roteirização de veículos tem como finalidade resolver problemas que estão
relacionados com a distribuição física de produtos e serviços, através de problemas de
otimização, que envolvem maximização e minimização, normalmente ligados a área de
Pesquisa Operacional, já os problemas de Programação Matemática, que são uma classe
particular de problemas de otimização, são muito aplicados nos campos da organização e do
gerenciamento logístico, em que o objetivo e as restrições são dadas como funções
matemáticos e relações funcionais.
O conceito de modelo matemático é essencial no estudo de Algoritmos Genéticos. Os
modelos matemáticos constituem uma abstração simplificada da realidade, representada por
um conjunto de equações e relações. A partir dessa idealização simplificada, o modelo
emprega símbolos matemáticos para representar as variáveis de decisão do sistema real.
A qualidade do modelo matemático está associada à exatidão com que ele representa a
realidade e ao grau em que captura aspectos essenciais da realidade. É importante saber
selecionar o que é relevante para a composição do modelo. Assim, é conveniente dividir o
problema em problemas menores, se possível; identificar as variáveis de decisão (nível de
produção); identificar possíveis relações entre as variáveis de decisão; identificar o objetivo
(maximizar produção, minimizar custo) e construir a função objetivo; identificar os fatores
restritivos (disponibilidade de recursos) e construir as restrições do modelo; finalmente,
construir o modelo matemático, como um problema de programação linear.
Algoritmos Genéticos são algoritmos de busca estocásticos que têm desenvolvimento
e funcionamento vinculados à genética, em que todas as novas espécies são produzidas por
meio de uma seleção natural em que o mais apto sobrevive gerando descendentes. O
Algoritmo Genético básico é o que realiza as seguintes funções: inicializa a população de
cromossomos; avalia cada cromossomo da população; cria novos cromossomos a partir da

2
população atual (realiza cruzamento e mutação); e termina, se o critério de fim for alcançado,
se não, reinicializa (VIANA, 1998).
No capítulo 1 tem-se o problema da pesquisa, no qual descreve o objetivo geral e os
objetivos específicos deste trabalho. No capítulo 2 apresenta-se a fundamentação teórica, com
os conceitos de Logística e Algoritmos Genéticos, e os seus principais operadores utilizados
na resolução de problemas de roteirização. No capítulo 3, detalham-se os métodos e técnicas
utilizadas para a realização deste trabalho. No capítulo 4, descrevem-se o problema em estudo
e as suas características e limitações. No capítulo 5, apresentam-se os resultados alcançados
neste trabalho por meio da utilização dos Algoritmos Genéticos. Por fim no capítulo 6
apresentem-se a análise do resultado obtido.
1.1 OBJETIVO GERAL
Otimizar uma rota de distribuição de bebidas de uma empresa fictícia situada na
cidade de Campo Grande – MS no programa matemático MATLAB® utilizando os
Algoritmos Genéticos como ferramenta de otimização.
1.2 OBJETIVO ESPECÍFICO
a) Estudar a teoria de Roteirização de veículos na Logística Aplicada;
b) Analisar modelos de roteirização eficientes no processo de distribuição de
bebidas;
c) Estudar os Algoritmos Genéticos como ferramenta de otimização;
d) Estudar o manuseio do programa de modelagem matemático MATLAB 7.0.

3
2 FUNDAMENTAÇÃO TEÓRICA
Este capítulo ressalta a importância da logística no cotidiano de cada empresa; o
conceito de roteirização e os seus principais métodos de resolução de problemas de
roteirização; e o conceito de Algoritmos Genéticos, com os seus principais operadores
genéticos.
2.1 LOGÍSTICA EMPRESARIAL
2.1.1 Definição de logística
O conceito de logística é mais abrangente e complexo do que simplesmente restringi-
lo apenas as atividades de transporte e entrega de produtos. Existem, na realidades , diversas
atividades, essenciais para as empresas, envolvidas no processo logístico.
Nogueira (2006, apud BALLOU, 1993, p. 16) definiu:
A logística empresarial trata de todas as atividades de movimentação e
armazenagem, que facilitam o fluxo de produtos desde o ponto de aquisição
da matéria prima até o ponto de consumo final, assim como dos fluxos de
informação que colocam os produtos em movimento, com o propósito de
providenciar níveis de serviço adequados aos clientes a um custo razoável.
Outra melhor definição de logística pode ser dada pelo Conselho de Administração
Logística (CLM – Council of Logistics Management) uma organização profissional de
gestores de logística, professores e práticos, formada em 1962 com o propósito de oferecer
educação continuada e fomentar o intercâmbio de idéias (apud BALLOU, 2001, p. 21):
Logística é o processo de planejamento, implementação e controle do fluxo
eficiente e economicamente eficaz de matérias primas, estoque em processo,
produtos acabados e informações relativas desde o ponto de origem até o
ponto de consumo, com o propósito de atender as exigências dos clientes.

4
Kobayazhi (2000, p. 17), apresenta outras definições mais detalhadas de logística
como sendo:
“A logística é a técnica e, ao mesmo tempo, uma ciência que suporta a
realização dos objetivos empresariais, a programação dos mesmos e a consecução; serve para
o management, o engineering e as atividades técnicas nos temas solicitados, o projeto, o
fornecimento e a preservação dos recursos”1.
“É o processo com o qual se dirige de maneira estratégica a transferência e
armazenagem de materiais, componentes e produtos acabados, começando dos fornecedores,
passando através das empresas, até chegar aos consumidores”2
Bowersox (2007,p. 19) afirma que “o objetivo da logística é tornar disponíveis
produtos e serviços no local onde são necessários, no momento em que são desejados”.
Visto as definições mais usuais de logística, Ballou (2001, p. 21) define “a missão do
profissional de logística é fornecer mercadorias e serviços a clientes de acordo com as suas
necessidades exigências de maneira mais eficiente possível”.
Conforme define a SOLE – Society of Logistics Enginners (apud KOBAYAZHI,
2000, p. 18), os objetivos da logística podem ser compreendidas nos “8R”, apresentados a
seguir:
Right Material (materiais justos)
Right Quantity (na quantidade justa)
Right Quality (de justa qualidade)
Right Place ( no lugar justo)
Right Time (no tempo justo)
Right Method (com o método justo)
Right Cost (segundo o custo justo)
Right Impression (com uma boa impressão)
1 SOLE – Society of Logistic Engineers
2 Martin Christopher

5
2.1.2 Origem do termo logística
De acordo com o Dicionário Aurélio, o termo logística vem do francês Logistique e
tem como uma de suas definições “a parte da arte da guerra que trata do planejamento e da
realização de: projeto e desenvolvimento, obtenção, armazenamento, transporte, distribuição,
reparação, manutenção e evacuação de material para fins operativos ou administrativos”.
Na sua origem, a logística estava relacionada às operações dos militares, quando
decidiam estratégias de avançar ou recuar suas tropas, eles tinham sob suas ordens uma
equipe de apoio que providenciasse o deslocamento, na hora certa, de munição, de
mantimentos e equipes de socorro medico para o campo de batalha (NOVAES, 2007).
Após mais de sessenta anos de logística e seus benefícios, pode-se perceber a evolução
e a sua importância nos dias atuais, sendo hoje considerada um dos elementos-chave na
estratégia competitiva das empresas. A sua idéia não é mais apenas “transporte e
armazenagem de produtos; hoje é o ponto nevrálgico da cadeia produtiva integrada”, afirma
Novaes (2001, p. 31). As equipes de logística não são mais percebidas como apenas
responsáveis pela função de entregar produtos ou serviços, mas sim por agregarem valor de
lugar, de tempo, de qualidade, de informação à cadeia produtiva; mas também eliminar do
processo tudo aquilo que não tenha valor ao consumidor final.
2.1.3 Atividades da logística
As atividades a serem gerenciadas que compõe a logística empresarial varia da
organização para organização, dependendo da estrutura da organização e as sua estratégias
particulares de cada organização.

6
Segundo o CLM3 (apud BALLOU, 2001, p. 22):
Os componentes de uma sistema logístico típico são: serviços ao cliente,
previsão de vendas, comunicação de distribuição, controle de estoque,
manuseio de materiais, processamento de pedidos, peças de reposição e
serviços de suporte, seleção do local da planta e armazenagem (análise de
localização), compras, embalagem, manuseio de mercadorias devolvidas,
recuperação e descarte de sucata, trafego e transporte, e armazenagem e
estocagem.
De acordo com Ballou (2001), as atividades logísticas são divididas em atividades-
chave ou atividades principais e atividades de suporte ou atividades secundárias, com algumas
das decisões associadas a cada atividade, sendo:
ATIVIDADES-CHAVE
1. Padrões de serviço ao cliente
Cooperar com o marketing para:
a. Determinar as necessidades e os desejos de clientes para serviços logísticos;
b. Determinar a reação dos clientes aos serviços; e
c. Estabelecer o nível de serviços a clientes.
d. Transportes
e. Seleção do modal e do serviço de transportes;
f. Consolidação de fretes;
g. Roteiro do transporte;
h. Programação de veículos;
i. Seleção de equipamentos;
j. Processamento de reclamações; e
k. Auditoria de tarifas.
2. Administração de estoques
a. Políticas de estocagem de matérias primas e produtos acabados;
b. Previsão de vendas a curto prazo;
c. Combinação de produtos em pontos de estocagem;
d. Numero, tamanho e local dos pontos de estocagem; e
e. Estratégias de Just-in-time, de empurrar e de puxar.
3 Council of Logistics Management

7
3. Fluxo de informação e processamento de pedidos
a. Processamentos de interface dos estoques com pedidos de vendas;
b. Métodos de transmissão de informações de pedidos; e
c. Regras de pedidos.
ATIVIDADES DE SUPORTE
1. Armazenagem
a. Determinação do espaço;
b. Disposição do estoque e desempenho das docas;
c. Configuração do armazém;
d. Localização do estoque.
2. Manuseio de materiais
a. Seleção de equipamentos;
b. Políticas de reposição de equipamentos;
c. Procedimentos de coleta de pedidos;
d. Alocação e recuperação de materiais.
3. Compras
a. Seleção de fontes de suprimentos;
b. O montante da compra;
c. Quantidades de compra.
4. Embalagem protetora
a. Manuseio;
b. Estocagem.
c. Proteção contra perdas e danos;
5. Cooperar com a produção/operações para
a. Especificar quantidades agregadas;
b. Seqüência e tempo do volume de produção.
6. Manutenção
a. Coleta, arquivamento e manipulação de informação;
b. Análise de dados;
c. Procedimentos de controle.
As atividades-chave e as de suporte são separadas por que, certas atividades, ocorrem
ao longo da cadeia logística, as atividades-chave estão num circuito critico, contribuindo

8
majoritariamente para o custo e são essenciais para conclusão eficaz das tarefas logísticas. As
atividades de suporte são consideradas como contribuintes para a realização da missão
logística, podendo nem existir em algumas empresas (BALLOU, 2001).
2.2 TRANSPORTE
O transporte é geralmente o principal elemento dos sistemas logísticos das empresas,
sua importância pode ser medida através de pelo menos três indicadores financeiros: custo,
faturamento e lucro. O transporte representa, cerca de 64% dos custos logísticos de uma
empresa, 4,3% do faturamento e, em alguns para maioria das empresas mais que o dobro do
lucro (FIGUEREDO, 2006 e BALLOU, 2001).
Bowersox e Closs (2001) afirma que três fatores são fundamentais para o desempenho
do transporte:
Custos – é o pagamento pela movimentação entre dois pontos geográficos e as
despesas relacionadas com o gerenciamento e a manutenção de estoque em trânsito. Os
sistemas de logística devem ser projetados para utilizar o tipo de transporte que minimizarem
o custo total do sistema.
Velocidade – é o tempo necessário para completar uma movimentação
especifica. A velocidade e os custos de transporte estão relacionados de duas maneiras: a
primeira relação, quanto mais rápido o serviço de entrega mais altas são as taxas de
transporte, a segunda relação , não menos importante, refere-se quanto mais rápido o serviço
de transporte, mais curto será o intervalo de tempo durante o qual o estoque ficará em trânsito.
Consistência – abrange as variações do tempo necessário para executar uma
movimentação especifica, considerando diversos carregamentos, a consistência é um reflexo
da confiabilidade do transporte. A consistência afeta o risco de falta de produto,
comprometendo o nível de estoque, tanto do vendedor como do comprador. A combinação
entre velocidade e consistência forma a percepção sobre a qualidade do transporte por parte
do usuário.

9
Conforme Manfroi (2008, apud CAIXETA FILHO E MARTINS, 2001, p. 37) “… os
estudos na área de transportes são de fundamental importância para a logística, na qual o
transporte é normalmente seu principal componente”.
A logística de transporte esta muito além da melhor forma de transferir uma
mercadoria do seu ponto de origem ao seu destino final com preço, qualidade e tempo
compatíveis com as necessidades e desejos dos consumidores (MANFROI, 2008 apud
GUIMARÃES E PACHECO, 2005, p. 37).
Para Enomoto (2005) compartilhando das idéias de Caixeta-Filho e Martins (2001)
ressalta que primeiramente o transporte tem uma função econômica de promover a integração
entre sociedades produtoras de bens em geral. Outra função econômica atribuída ao sistema
de transporte é a possibilidade de expandir mercados.
Em relação a funcionalidade do transporte, Bowersox e Closs (2001) diz que o
transporte possui duas funções principais:
Movimentação de Produtos – movimentação de produtos de um determinado
local de origem até o seu destino. O transporte é responsável pela movimentação de produtos,
materiais e/ou serviços. Assim, assegura o fluxo físico dos produtos entre as empresas. De
modo geral, a movimentação é necessária para transportar o produto até a fase seguinte do
processo ou para perto do cliente final, ou seja, essa movimentação pode acontecer a
montante ou a jusante na cadeia de agregação de valor e os produtos podem estar das mais
variadas formas. A movimentação para ser desempenhada necessita de recursos temporais,
recursos financeiros; recursos ambientais.
Estocagem de produtos – mesmo que temporária, não deixa de ser uma função
do transporte. Apesar de possuírem um custo muito elevado de estocagem, os veículos podem
se tornar uma opção viável na análise dos custos de carga/descarga, restrições de capacidade
ou a possibilidade do aumento dos tempos de viagem ou espera.
Para Enomoto (2005, apud LAMBERT, 2008, p. 20) as atividades de transporte
incluem:
A escolha do meio de transporte (modo de transporte). O transporte pode ser
realizado de várias formas e com diferentes veículos, podendo ainda ser de frota própria ou
contratada, dependendo de vários aspectos;
A rota a ser seguida;
Manutenção da frota;

10
O cumprimento das regulamentações de transporte em nível municipal,
estadual e federal;
Conhecimento das exigências do transporte nacional e internacional.
De acordo com Manfroi (apud KEEDI, 2001, p. 38), os transportes representam
“como fazer uma mercadoria sair do seu ponto de origem (...) para aquele que a está
remetendo, e ser entregue no seu destino (...) de forma mais conveniente, ao menor tempo,
custo adequado, e com o menor ou nenhum tipo de problema, utilizando-se dos mais
adequados meios à disposição para este fim”.
O transporte não se limita apenas ao translado de mercadorias, deve ser considerado
sua execução de forma otimizada, em que os fatores tempo, custo e eficiência são
indispensáveis para cada empresa. Transporte implica fazer uma reflexão sobre todos os
aspectos da operação de movimentação na distribuição física. A função de transporte por
muito tempo já foi considerada a própria logística, onde os profissional da área visualizavam
que transporte significava movimentar os materiais desejados de um ponto a outro da cadeia
de suprimento (FIGUEREDO, 2006; MANFROI, 2008; ENOMOTO, 2005 e BALLOU,
2001).
Para auxiliar na resolução desses problemas, as empresas, utilizam muitas vezes
técnicas matemáticas e software comerciais, com o objetivo de auxiliar o gestor em logística
na tomada de decisão.
Segundo Bowersox e Closs (2001), os principais norteadores das operações e
gerenciamento do transporte são dois:
A economia de escala é obtida através da redução dos custos de transporte por
unidade de peso com cargas maiores e/ou consolidadas. Isso acontece porque as despesas
fixas de transporte são diluídas quando há uma maior quantidade transportada, isto é, quanto
maior a carga, menor será o custo por unidade de peso;
A economia de distância caracteriza-se pela redução dos custos de transporte
por unidade de distância, à medida que ela aumenta, ou seja, distâncias mais longas permitem
que o custo fixo seja distribuído por mais quilômetros, provocando taxas menores por
quilômetros.
Segundo Ballou (2001) um sistema de transporte eficiente e barato contribui para:

11
Aumentar a concorrência no mercado – o transporte de alta qualidade e barato
encoraja a competição, disponibilizando mercadorias para um mercado que não poderia
suportar aos altos custos de transporte, aumentando as vendas através da penetração de
produtos que não eram disponíveis em certas regiões.
Escala de produção – o transporte barato possibilita a descentralização de
mercados e de locais de produção, de forma que a produção pode ser instalada onde há
vantagem geográfica.
Reduzir os preços de mercadorias – o transporte é um componente de custo, o
transporte barato e eficiente contribui para redução dos preços dos produtos.
Segundo Enomoto (2005, apud LAMBERT, 1998, p. 21) as características do produto
influenciam o custo do transporte. Os produtos podem ser classificados nas seguintes formas:
Densidade – que se refere ao índice de peso/volume;
Facilidade de armazenagem – é o grau em que o produto preenche um espaço
no veículo de transporte;
Facilidade ou dificuldade de manutenção – está relacionada com a facilidade
de armazenagem.
Para Figueiredo (2006, p. 247) “administrar transporte significa tomar decisão sobre
um amplo conjunto de aspectos” e podem ser classificadas em dois grandes grupos:
Decisões estratégicas – são as decisões que se caracterizam pelos impactos de
longo prazo e se referem basicamente a aspectos estruturais. Basicamente as decisões
estratégicas no transporte são: escolha dos modais, decisões sobre propriedades da frota,
seleção e negociação com transportadores, e políticas de consolidação de cargas;
Decisões operacionais – são geralmente as decisões de curto prazo e se
referem às tarefa as do dia-a-dia dos responsáveis pelo transporte. As principais decisões de
curto prazo são: planejamentos de embarques, programação de veículos, roteirização,
auditoria de fretes, e gerenciamento de avarias.
Saber gerenciar as interferências do meio, de modo que não haja prejuízos para a
empresa contratante, faz com que todos os envolvidos obtenham vantagens competitivas no
mercado que atuam (ENOMOTO, 2005).

12
2.2.1 Escolha dos modais
Basicamente são cinco os modais de transporte de cargas: rodoviário, ferroviário,
aquaviário, dutoviário e aéreo. Sendo que cada um possui um custo particular, que os torna
adequados para certos tipos de operações e produtos.
Os critérios para escolha de modais devem sempre levar em consideração dois
aspectos básicos, os aspectos de preço/custo e os aspectos de características de serviços.
Levando em consideração que quanto maior o desempenho do serviço maior o custo do
mesmo (BALLOU, 2001 e FIGUEIREDO, 2006).
2.2.1.1 Aspectos de preço/custo
O preço ou custo do serviço de transporte, no caso do embarcador, é apenas a
somatória da taxa de transporte mais as cobranças por serviços adicionais fornecidos ou
custos relevantes. Os custos relevantes são itens como: combustível, mão-de-obra,
manutenção, depreciação do equipamento e custos administrativos. No caso de serviços
contratados, é cobrada a taxa de movimentação da mercadoria mais algum a taxa adicional, tal
como coleta na origem, entrega no destino, seguro entre outros (BALLOU, 2001).
2.2.1.2 Aspectos de características de serviços
Esta dimensão pode ser considerada na escolha do modal, sendo cinco as
características mais importantes, no que diz respeito aos serviços oferecidos, são:
Velocidade – o tempo médio que um carregamento leva para se deslocar do seu
ponto de origem até o ponto de destino;
Consistência – que representa a capacidade de cumprir os tempos previstos;

13
Perdas e danos – representa a capacidade de movimentar mercadorias sem
nenhuma perda ou dano, se caso ocorra, o mínimo possível durante a movimentação;
Capacitação – representa a capacitação de um determinado modal trabalhar
com diferentes volumes e variedades de produtos;
Disponibilidade – refere-se ao numero de localidades onde o modal se encontra
presente;
Freqüência – refere-se ao número de vezes em que um determinado modal
pode ser utilizado em dado espaço de tempo (BALLOU, 2001 e FIGUEIREDO, 2006).
2.2.2 Tipos de modais
2.2.2.1 Modo rodoviário
“O modo rodoviário é o mais expressivo no transporte de cargas no Brasil, e atinge
praticamente todos os pontos do território nacional” (ALVARENGA e NOVAES, 2000, p.
82).
São usadas na América do Norte as siglas FTL (full truck load) para indicar um
carregamento completo, ou seja, o veículo é carregado totalmente com um lote de despacho. E
a sigla LTL (less than truck load) para indicar que a capacidades do veículo é compartilhada
com a carga de dois ou mais embarcadores. No Brasil, é costumamos chamar de lotação
completa o primeiro caso, e de carga fracionada o segundo (NOVAES, 2007; BALLOU,
2001 e BOWERSOX e CLOSS, 2001).
Segundo Novaes (2007), no caso da carga fracionada, as operações mais comuns são
formadas pelos seguintes processos:
Apanhar o lote a ser transportado no depósito do cliente;
Transportar o lote até o centro de distribuição local da transportadora;
Descarregar, verificar, rotular e triagem da mercadoria segundo os diversos
destinos;
Transferir as mercadorias até a cidade de destino;
Descarregamento, verificação e triagem da mercadoria ao cliente final.

14
A locação completa é a escolha principal na transferência de grandes quantidades,
como entre fabrica e um centro de distribuição, ou atacadista e varejista. A sua grande
vantagem é que as quantidades transportadas são maiores, favorecendo a escolha de em
veículo maior que irá totalmente lotado. Essa vantagem possibilita o ganho em três grandes
custos principais:
O veículo é em geral maior, com custo mais baixo por unidade transportada;
Por ser homogênea, a carga é melhor arrumada no caminhão, com maior
aproveito do espaço, assim reduzindo o custo unitário;
Eliminam-se inúmeras operações intermediarias como descarga e recarga dos
produtos em veículos menores, reduzindo assim os custos com movimentação da carga
(NOVAES, 2007, BALLOU, 2001 e BOWERSOX e CLOSS, 2001).
O modal rodo apresenta as seguintes vantagens:
Alcançar qualquer ponto de entrega;
Maior disponibilidade de vias de acesso;
Possibilidades de serviços porta a porta; embarques e partidas mais rápidas;
Possibilidade de embarque de pequenos lotes;
Facilidade de substituição do veiculo em casos de acidentes;
Maior rapidez de entrega; e
Segurança, em função do menor manuseio da carga.
Como desvantagens desçam-se:
Maior custo operacional e menor capacidade de carga;
Possibilidade de congestionamento e atrasos;
Desgaste da malha rodoviária por excesso de peso e/ ou rodagem;
Altos custos de depreciação dos veículos, devido aos maus estados da malha
rodoviária (ENOMOTO, 2005, NOVAES, 2007, BALLOU, 2001 e BOWERSOX e CLOSS,
2001).
Apesar dessas desvantagens o transporte rodoviário continua sendo o mais utilizado e
o mais importante das operações logísticas.

15
2.2.2.2 Modo ferroviário
“A ferrovia é basicamente um transportador de longo curso e um movimentador lento
de matéria prima… e de produtos manufaturados de baixo valor… e prefere mover embarques
de carregamento completo” (BALLOU, 2001, p. 123).
O modo ferroviário apresenta as seguintes vantagens:
É basicamente mais eficiente em termos de consumo de combustível e outros
custos operacionais indiretos, por se operar em unidades (os trens) de maior capacidade de
carga;
Manuseio de cargas e volume maior a serem transportados, como produtos a
granel (grãos, minérios, fertilizantes, combustíveis e etc.) entre outros;
Serviço expresso para garantir a chegada da mercadoria dentro de certo espaço
de tempo;
Privilégios de varias parados, que permitem carregamento e descarregamento
parcial entre o ponto de origem e o ponto de destino;
Coleta e entrega; e
Diversificação e redespacho, que permitem circuito de roteirização e mudanças
no destino final de um embarque enquanto o percurso.
E apresenta as seguintes desvantagens:
Velocidade no transporte relativamente lenta;
Existência de vagões com finalidades especificas que não podem ser utilizados
no transporte de outros produtos; e
Altos custos fixos da ferrovia, como conservação da via permanente, operação
das estações, operação dos terminais de carga e descarga, entre outros (NOVAES, 2007,
BALLOU, 2001 e BOWERSOX e CLOSS, 2001).
Uma forma de utilização eficiente no transporte de cargas é o piggy-back, isto é, são
fixados contêineres ou carretas sobre vagões-plataforma, permitindo a combinação ferrovia-
rodovia, associando a agilidade d o transporte rodoviário com o menor custo unitário do trem
(NOVAES, 2007).

16
2.2.2.3 Modo aquaviário
“O transporte aquaviário, como sua denominação indica, envolve todos os tipos de
transporte efetuado sobre a água. Incluindo o transporte fluvial e lacustre (aquaviário interior)
e o transporte marítimo (NOVAES, 2007, p. 247).
A principal vantagem do transporte aquaviário esta na capacidade transportar grandes
volumes/tonelagem a um custo variável baixo. As principais desvantagens são a rapidez e o
alcance de operação limitada. Os principais produtos transportados são os produtos de
mineração, os produtos de commodities básicas a granel e alguns tipos de produtos agrícolas
(NOVAES, 2007, BALLOU, 2001 e BOWERSOX e CLOSS, 2001).
2.2.2.4 Modo dutoviário
A natureza de uma dutovia é singular, pois apresentam características, vantagens e
desvantagens próprias. A principal vantagem e característica da dutovia é o seu tempo
constante de operação, operando 24 horas por dia, sete dias da semana, com restrição de
funcionamento apenas durante a mudança do produto transportado e manutenção. Além de
apresentar o menos custo variável, se comparado com os outros modais, pois não necessita de
muita mão-de-obra. Outra característica são as pequenas perdas e danos do produto ao longo
do transporte. As principais desvantagens são os altos custos fixos, resultante do direito de
acesso, da construção e das capacidades de controle das estações, além da capacidade de
bombeamento. Outra desvantagem é que os dutos não flexíveis e são limitados quanto aos
produtos que podem ser transportados – transportam produtos somente nas formas de gás,
liquido ou de mistura semifluida (NOVAES, 2007, BALLOU, 2001 e BOWERSOX e
CLOSS, 2001).
Segundo Bowersox e Closs (2001) os produtos economicamente mais viáveis para
serem movimentados por dutos são o petróleo cru, os produtos de petróleo refinado e o gás
natural.

17
2.2.2.5 Modo aéreo
Para Novaes (2007, p. 251) “a importância do transporte aéreo na Logística aumentou
muito com a globalização, pois agora as cadeias produtivas estenderam suas ramificações pelo
mundo todo”.
O mais novo tido de transporte, porém menos utilizado, é o transporte aéreo. A grande
vantagem deste modal está na sua rapidez de entrega de cargas, e a grande desvantagem está
nos altos custos de transporte que esse modal exige. Os principais produtos transportados são:
cartas e envelopes, jóias, flores, produtos perecíveis, entre outros, devido a sua vantagem de
ser um modal segura e com poucas perdas e danos aos produtos (NOVAES, 2007, BALLOU,
2001 e BOWERSOX e CLOSS, 2001).
2.3 ROTEIRIZAÇÃO DE VEÍCULOS
Após a fase de planejamento logístico, na qual são analisados e dimensionados os
locais ou regiões e a frota de veículos necessários para realizar um determinado tipo de
serviço de distribuição ou prestação de serviços, se encontra um problema especifico de
enfoque operacional, no caso da distribuição física, pois já se conhece as localizações dos
clientes e suas demandas, um problema muito freqüente é o problema da roteirização de
veículos.
Segundo Noveas (2007 apud PARTYKA e HALL, 2000, p.303) “um problema real de
roteirização é definido por três fatores fundamentais: decisões, objetivos e restrições.”
As decisões consistem em agrupar os clientes que devem ser visitados,
programando e seqüenciando-as, a um conjunto de veículos.
O objetivo principal do processo de roteirização visa propiciar um serviço de
alta eficiência aos clientes e ao mesmo tempo minimizar os custos operacionais da
distribuição.

18
As restrições, dizem respeito às limitações impostas por normas ou leis, nos
casos, por exemplo, respeitar o limite de tempo impostos pela jornada de trabalho dos
motoristas e ajudantes, respeitar as restrições de trânsito, referindo-se aos limites de
velocidades, tamanho máximo do veiculo, entre outras, e as limitações operacionais, no caso,
por exemplo, respeitar os limites de dimensões e capacidade de peso suportado pelo veiculo.
Problemas de roteirização ocorrem com bastante freqüência na distribuição de
produtos e serviços. Alguns exemplos são listados a seguir (NOVAES, 2007, p.304):
entrega, em domicílio, de produtos comprados nas lojas de varejo ou pela
internet;
distribuição de produtos dos centros de distribuição (CDs) para lojas de varejo;
distribuição de bebidas em bares e restaurantes;
distribuição de dinheiro para caixas eletrônicos de bancos;
distribuição de combustíveis para postos de gasolina;
distribuição de artigos de toalete (toalhas, roupa de cama, etc) para hotéis,
restaurantes e hospitais;
coleta de lixo urbano;
entrega domiciliar de correspondência, etc;
2.3.1 Princípios básicos de roteirização e programação de veículos
Antes de começarmos a estudar os tipos de roteirização e alguns dos mais freqüentes
problemas de roteirização, precisamos tomar como diretrizes oito princípios básicos, que
podem nos auxiliar ao longo do processo de desenvolvimento de boas rotas.
Para Ballou (2001) esses princípios são:
1. Carregar os caminhões com volumes de paradas que estão próximas entre si;
2. As paradas em dias diferentes devem ser combinadas para produzir
agrupamentos densos;

19
3. A construção de rotas começando com a parada mais distante do deposito;
4. A seqüência das paradas em uma rota rodoviária deve formar um padrão de
gota d’água;
5. As rotas mais eficientes são constituídas usando os maiores veículos
disponíveis;
6. As coletas devem ser combinadas com as rotas de entrega em vez de serem
deixadas para o final das rotas;
7. Uma parada que é removível de um agrupamento de rota é uma boa candidata
para um meio alternativo de entrega;
8. As limitações das janelas de tempo estreitas devem ser evitadas;
Esses princípios usados em projetos de formação de rotas podem oferecer melhorias
substanciais sobre outros métodos de roteirização que serão mencionados ao longo deste
trabalho.
2.3.2 Roteirização sem restrições
Para Novaes (2007) a roteirização sem restrições não leva em conta as questões de
tempo e nem capacidade de carga e carregamento, como o nome já diz ela não se preocupa
em respeitar ou atender um dos fatores fundamentais da roteirização que é a questão das
restrições.
A roteirização sem restrições ocorre quando o numero de locais ou clientes a serem
visitados são relativamente poucos ou podem ser facilmente resolvido por meio de inspeção,
permitindo a ocorrência de problemas relacionados à otimização do percurso, minimizando a
distância a ser percorrida, ou relacionado com a otimização da seqüência de visitas,
encontrando a seqüência que torne mínimo o percurso dentro da rota (BALLOU, 2001 e
NOVAES 2007).

20
2.3.3 Roteirização com restrições
A roteirização com restrições ocorrem quando as resoluções dos problemas de
roteirização estão relacionados ou condicionados aos limites de tempo, de capacidade dos
veículos, a barreiras de viajem (lagos, contornos, montanhas) e muitas vezes devem ser
resolvidas em paralelo com o processo de divisão das áreas de entrega (BALLOU, 2001 e
NOVAES 2007).
2.3.3.1 Problemas de roteirização
De acordo com Farkuh Neto (2005 apud BODIN, 1983, p.2),
os problemas de roteirização podem ser classificados em três grupos
principais: problemas de roteirização pura de veículos (PRV), problemas de
programação de veículos e tripulações (PRVT); e problemas combinados de
roteirização e programação de veículos.
Segundo Farkuh Neto (2005) quando ocorrem aplicações com restrições de janelas de
tempo e de precedência de tarefas, o problema pode ser visto como um problema combinado
de roteirização e programação de veículos. O problema de roteirização e programação de
veículos com janelas de tempo, PRRPVJT, (Vehicle Routing Problem with Time Windows –
VRPTW), é considerado uma NP-Completo. Este tipo de problema surge freqüentemente na
pratica e pode ser considerado um problema comum de roteirização logística, no qual precisa
associar os clientes a serem atendidos a determinados veículos e numa seqüência ótima, que
minimize o custo total e respeite as janelas de atendimento (FARKUH NETO, 2005,
BELFIORI, 2006).
Na literatura encontramos diversos métodos para resolver esses tipos problemas,
alguns envolvendo modelos matemáticos complexos e outros relativamente simples, neste
trabalho escolhemos alguns métodos bastante utilizados e eficazes. São eles:
Método de varredura;

21
Método de Clarke e Wright;
Método de melhoria do roteiro;
Método de Atribuição Paralela.
2.3.3.2 Método de varredura
Novaes (2007 apud BALLOU, 1999, p.310) afirma que “o método de varredura
apresenta precisão de 10%, tomando como referência a solução ótima absoluta”. Segundo
Ballou (2001) por se tratar de um método fácil de usar e de requerer uma computação rápida,
esse nível de precisão pode ser aceita em situações que ocorrem muito rapidamente a
mudança das características do problema.
Para Ballou (2001) e Novaes (2007) o método de varredura pode ser descrito pelos
seguintes passos:
1º Passo: tornar o centro de distribuição (CD) como centro do mapa e definir um eixo
passando por ele.
2º Passo: girar o eixo em torno do CD, independente do sentido, até que a linha
encontre um cliente;
3º Passo: verificar se o cliente em potencial pode ser incluído no roteiro, analisando se:
(a) o tempo de atendimento não exceda a jornada de trabalho permitida; (b) a quantidade
solicitada pelo cliente não exceda as restrições de peso e quantidade do veiculo de entrega. Se
o novo cliente não exceder as condições analisadas este será incorporado ao roteiro;
4º Passo: o processo de formação de um roteiro termina quando se esgotam todas as
possibilidades de inclusão de um novo cliente, em seguida deve ser iniciado um novo
processo de formação de roteiro, até que todos os clientes sejam atendidos;
5º Passo: aplicar os métodos de melhoria do roteiro (estes serão apresentados no
decorrer do trabalho);

22
2.3.3.3 Método das economias de Clarke e Wright
Conforme Ballou (2001, p. 170) “o objetivo do método das economias é minimizar a
distância total percorrida por todos os veículos necessários para servir a todas as paradas”.
Novaes (2007, p. 315) “… o método de Clarke e Wright tem como objetivo gerar
roteiros que respeitem as restrições de tempo e de capacidade, mas visando, ao mesmo tempo,
minimizar a distância total percorrida pela frota.” Este método parte do conceito de ganho,
encontrando quais destinos a ser percorrido oferece um ganho maior (BALLOU, 2001 e
NOVAES, 2007).
Segundo Ballou (2001) o método de Clarke e Wright produz um erro médio de 2% em
relação ao ótimo absoluto, e se encontra com facilidade em muitos programas de roteirização,
por permitir incorporar diversos tipos de restrições, e utilizar formas engenhosas de
construção de roteiros.
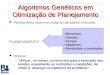
A lógica do método é começar com um veículo-modelo que serve a cada parada e que
retorne ao depósito, como mostra a Figura 1(a), e a possibilidade de melhoria seria juntar as
duas paradas num só roteiro, como mostra a Figura 1(b), resultando na economia na distância
a percorrer (BALLOU, 2001 e NOVAES 2007).
Figura 1 – Distância reduzida através da melhoria de roteiro.
Fonte: Adaptado de Novaes (2007, p. 316)
O método de Clarke e Wright consta com os seguintes passos:

23
1º Passo: combinar todos os pontos dois a dois e calcular o ganho para cada
combinação através formula a seguir:
Na qual g corresponde ao ganho, i e j representam os clientes, dD,i e dD,j representa as
distâncias entre o CD e os clientes.
2º Passo: classificar todas as combinações i, j, de forma decrescente segundo os
valores dos ganhos gi,j.
3º Passo: combinar dois a dois os nós, respeitando a classificação decrescente de
acordo com o ganho.
4º Passo: analisar e verificar se o par de clientes (i, j) candidato atente as seguintes
condições:
a) Se i e j não foram incluídos em nenhum outro roteiro já iniciado, criar então
um novo roteiro com esses dois pontos;
b) Se o ponto i já pertencer a um roteiro iniciado, verificar se esse ponto é
primeiro ou ultimo desse roteiro. Em caso positivo, acrescentar o par do ponto (i, j) na
extremidade do ponto i. Fazer a mesma analise para o ponto j. Se nenhum dos dois pontos
atenderem essas condições separadamente, passar para o próximo item;
c) Se ambos os pontos i e j fazem parte, cada um deles, de roteiros iniciados, mas
diferentes, verificar se ambos são extremos dos respectivos roteiros. Em caso positivo,
devem-se unir os pontos i e j, a fim de formar um único roteiro. Caso contrario, passar para o
5˚ Passo.
d) Se ambos os pontos i e j pertencem a um mesmo roteiro, passar para o 5˚
Passo.
5º Passo: após acrescentar ou unir um ou mais pontos no roteiro, verificar se a nova
configuração atende e satisfaz as restrições de tempo e capacidade.
6º Passo: o processo termina quando todos os clientes tiverem sido incluídos nos
roteiros (BALLOU, 2001 e NOVAES 2007).

24
2.3.3.4 Método de Atribuição Paralela
O método de atribuição paralela é assim chamado por calcular a prioridade para
cliente considerando todos os depósitos ao mesmo tempo. Esse método compara o custo de
atribuir um cliente a seu deposito mais próximo com o custo de atribuir o cliente a outro
deposito. (SILVA JUNIOR, 2008)
Segundo com Silva Junior (2008) o método possui o seguinte funcionamento: cada
cliente pertence a somente um dos seguintes conjuntos: A, se um cliente foi atribuído para um
deposito, NA, se o cliente ainda não foi atribuído para um depósito. Cada depósito pertence a
somente um dos seguintes conjuntos: DS, se a demanda do depósito já ter sido satisfeita e
DNS, se a demanda do deposito ainda não ter sido satisfeita.
Silva Junior (2008) ainda menciona que uma atribuição de um cliente para um
deposito é possível apenas se: a) o deposito pertence ao conjunto DNS; b) o cliente pertence
ao conjunto NA. O método de Atribuição Paralela conta com os seguintes passos:
1º Passo: calcular a urgência u de cada cliente através da formula a seguir:
c corresponde ao cliente ou cidade;
D corresponde a distância e;
d corresponde ao depósito.
2º Passo: criar uma lista de clientes NA ordenada em ordem decrescente pelo valor da
urgência u;
3º Passo: iniciar a atribuição a partir do cliente com maior urgência u.
4º Passo: atribuir o cliente ao deposito mais próximo e que esteja no conjunto DNS;
remover o cliente de NA e adicionar em A; atualizar a demanda atendida pelo deposito, se a
demanda for igual à sua capacidade, então remove o deposito de DNS e o adicione em DS;
5º Passo: o processo termina quando todos os clientes forem atendidos.

25
2.3.4 Métodos de Melhoria de Roteiros
De acordo com Novaes (2007, p. 308) “os métodos de melhoria têm como objetivo
aperfeiçoar o resultado obtido por outros métodos, usando uma sistemática predefinida. Os
métodos mais utilizados são o 2-opt e o 3-opt, desenvolvidos por Lin e Kernighan”.
Segundo Novaes (2005), o método 2-opt, mais simples, tem a seguinte evolução
computacional:
Etapa 1: Começamos com um roteiro qualquer, de preferência um roteiro gerado com
o auxilio de um método de construção.
Etapa 2: Removemos dois arcos do roteiro e tentativamente reconectamos os nós que
formam esses dois arcos, alterando as ligações. Se essa nova ligação produzir um resultado
melhor, isto é, gerando um roteiro de extensão menor do que o anterior, substituímos o roteiro
e repetimos a etapa 2. Caso contrario, continuamos com o roteiro anterior e tentamos outros
dois arcos, repetindo a etapa 2, e assim sucessivamente.
Etapa 3: O processo termina quando não se conseguir nenhuma melhoria, ao se
fazerem todas as trocas de ligações possíveis.
De acordo com Novaes (2004, p. 309) “o método 3-opt conceitualmente é um
procedimento de melhoria de roteiro similar ao 2-opt com a diferença é que são removidos
três arcos distintos em cada integração de tentativa de melhoria do roteiro.”
No próximo capitulo falaremos sobre os Algoritmos Genéticos como uma ferramenta
de otimização utilizada na resolução de problemas de roteirização de veículos.
2.4 ALGORITMOS GENÉTICOS NA RESOLUÇÃO DE PROBLEMAS DE
ROTEIRIZAÇÃO
Começaremos esse capitulo com uma breve introdução sobre os Algoritmos Genéticos
(AGs).

26
Para Rodrigues (2009 apud LINDEN, 2008; GUERVÓS, 2009, p.3):
“Os Algoritmos Genéticos são algoritmos de busca, criados por John
Holland em 1975, baseado nos processos observados na evolução natural das
espécies. O conceito básico consiste em que, de forma similar à teoria
biológica dos sistemas naturais, os “melhores” indivíduos sobrevivem e
geram descendentes com suas características hereditárias, no qual esses
novos elementos tendem a ter a mesma aparência, ou fenótipo, que seus
antecessores.”
Souza (2010) afirma que:
“... a implementação dos Algoritmos Genéticos parte de uma população
indivíduos gerados aleatoriamente (configurações iniciais de um problema),
realiza-se a avaliação de cada um (em relação a função objetiva), seleciona
os mais aptos e promove os manipuladores ou operadores genéticos como
cruzamento e mutação, originando novas gerações de indivíduos. Cada
individuo na população representa uma possível solução para um dado
problema ...”
Conforme Rodrigues (2009, p. 3) “o que o AGs faz é buscar aquela solução que seja
muito boa ou a melhor do problema analisado através da criação de população de indivíduos
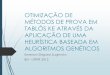
cada vez mais aptos levando à otimização da função objetiva”. Na FIGURA 2 podem-se
resumir os Algoritmos Genéticos através do fluxograma.

27
Figura 2 – Fluxograma da solução de problemas de otimização com Algoritmos
Genéticos.
Fonte: Adaptado de Rodrigues (2009, p. 3)
Os AGs permitem uma simplificação na formulação e solução de problemas de
otimização, pois imcorporam uma solução possivel para o problema utilizado numa estrutura
semelhante à estrutura de um cromossomo, aplicam operadores de seleção e cruzamento a
essas estruturas de forma a preservar informações importantes para a solução de problema
(LINDEN, 2008).
2.4.1 Representação de soluções possiveis (cromossomos)
Segundo os estudos de Silva (2006), para resolução de problemas de roteirização,
foram propostas varias formas de representação do espaço de busca, entre as principais estão:
a ordinal, por caminho (ou inteiros) e por adjacência.

28
2.4.1.1 Representação ordinal
De acordo com Araújo (2008) “Nesta forma de codificação, cada solução é
representada como uma lista de n cidades, onde o i-ésimo elemento da lista é um número entre
1 e n – i +1. Existe uma lista ordenada de cidades que serve como referencia para construir a
representação. A lista ordenada l, varia de 1 a n cidades”, ou seja, o cromossomo é um vetor
de posicionamento da cidade na lista. Por exemplo, seja o cromossomo p = (1, 1, 2, 3, 1, 1) e
a lista l = (1, 2, 3, 4, 5, 6).
A representação ordinal é construída seguindo as seguintes etapas: o primeiro
elemento do cromossomo p é 1. Ele corresponde ao primeiro elemento da lista l que é o 1
(Rota: 1). O próximo elemento do cromossomo p é 1. Ele corresponde ao primeiro elemento
da lista l atualizada (após remoção do 1) que é o 2 (Rota: 1 2). O próximo número do
cromossomo p é 2. Tal número corresponde ao segundo elemento da lista l atualizada (sem o
1 e o 2) que é o 4 (Rota: 1 2 4). O próximo elemento do cromossomo é 3, correspondendo ao
6 na lista l atualizada (Rota: 1 2 4 6). Seguindo este raciocínio, chega-se à rota final: 1 2 4 6 3
5. Essa é a solução representada por este cromossomo (SILVA, 2006 e ARAÚJO, 2008).
2.4.1.2 Representação por caminho
Nesta representação o cromossomo é formado pela seqüência dos nós na solução. Por
exemplo, o cromossomo p = (1,2,3,5,4,7,6) representa a solução 1→2→3→5→4→7→6.
2.4.1.3 Representação por adjacência
De acordo com Silva (2006) “Cada cromossomo é representado como uma lista de n
cidades, a cidade j da rota é listada na posição i se, e somente se, a rota vai da cidade i a
cidade j.”

29
Por exemplo, um cromossomo p = (1,2,3,5,4,7,6) apresenta os seguintes arcos em uma
rota associada a p: 1→2; 2→6; 6→7; 7→3; 3→5; 5→4; 4→1. Assim o cromossomo
representa a seguinte configuração: 1→2→6→7→3→5→4.
2.4.2 Terminologia
Antes de nos aprofundarmos nos AGs, é importante no familiarizarmos com a sua
terminologia adotada, visto que esses algoritmos possuem uma linguagem única, por serem
inspirados na genética humana, há uma analogia entre os termos biológicos e os termos
usados no campo dos AGs. De acordo com a literatura existente, na tabela abaixa está
algumas das terminologias que serão mencionadas com freqüência neste trabalho.
Tabela 1 – Terminologia dos Algoritmos Genéticos
Linguagem natural AGs
Cromossomo Individuo
Gen Característica
Alelo Valor
locus Posição
Genótipo Estrutura
Fenótipo Conjunto de parâmetros
Fonte: O autor.

30
2.4.3 Função de avaliação
Segundo Linden (2008) a função de avaliação, também chamada de função de custo,
calcula então o valor numérico que reflete quão bons os parâmetros representados no
cromossomo resolvem o problema.
Em virtude dos parâmetros do problema serem conflitantes, a função de aptidão é
construída para encontrar o ponto ótimo, em problemas de otimização ela pode representar a
função objetiva do problema.
A função de avaliação deve portanto ser escolhida com grande cuidado. Ela deve
embutir todo o conhecimento que se possui sobre o problema a ser resolvido, tanto suas
restrições quanto seus de qualidade (LINDEN, 2008).
2.4.4 Escolha da população inicial
A inicialização da população é feita da forma mais simples possível, fazendo-se uma
escolha aleatória independente para cada individuo da população inicial ou por processo
heurístico, isto é, simplesmente escolher n indivíduos dentro do espaço de busca. Essa técnica
permite gerar uma boa distribuição, cobrindo um espaço maior no espaço de busca, sem
interessar se são boas soluções ou não, assim como na natureza para haver evolução é
necessário diversidade (LINDEN, 2008; VIANA, 1998 e SOUZA, 2010).
Segundo Malaquias (2006) nos casos de problemas de roteirização, a escolha da
população inicial é feita através de possíveis rotas para n clientes, calculada pela formula a
seguir:
A TABELA 2 mostra o numero de rotas possíveis em função do numero de clientes,
tomando, por exemplo, uma rota de 14 clientes e serem atendidos.

31
Tabela 2 – Dimensão do espaço de busca em função do número de cidades no problema
do caixeiro viajante.
número de cidades (n) número de rotas
3 1
4 3
5 12
6 60
7 360
8 2.520
9 20.160
10 181.440
11 1.814.400
12 19.958.400
13 239.500.800
14 3.113.510.400
15 43.589.145.600
16 653.837.184.000
Fonte: Adaptado de Malaquias (2006, p. 54)
2.4.5 Seleção
A seleção dos indivíduos da população deve simular o mecanismo de seleção natural,
“sobrevivência dos mais fortes”, em que os pais mais aptos geram mais filhos. O algoritmo
permite, também, que alguns indivíduos menos aptos gerem filhos, garantindo a diversidade
entre os indivíduos melhores e os piores. Se apenas os melhores indivíduos se reproduzirem a
população tenderá a ser cada vez mais semelhante, não ocorrendo a evolução (LINDEN, 2008
e VIANA, 1998).
Há diversas formas de seleção dos indivíduos reprodutores, entre elas as mais usadas
são os métodos de seleção por Torneio e o método da Roleta Viciada (VIANA, 1988).
Neste trabalho optemos por apresentar apenas o método de seleção da Roleta Viciada,
por se tratar de um método bastante abrangente, pois considera todos os indivíduos da
população; e por ser considerado um método pratico e de tempo computacional insignificante.

32
2.4.5.1 Seleção Via Método da Roleta
Essa etapa emprega o principio da probabilidade de sobrevivência do mais apto, ou
seja, que possui a melhor função objetiva associada. Com base nos valores de )( ii xf , onde ix
é o indivíduo i avaliado de n indivíduos amostrados. Os indivíduos mais aptos são
selecionados e duplicados em substituição aos menos aptos. Nessa etapa é quantificada a
probabilidade pi de i-ésimo indivíduo da população vir a ser selecionado é proporcional à
sua probabilidade de seleção.
Assim, os indivíduos com alta aptidão recebem uma proporção maior na roleta e os
indivíduos com baixa aptidão uma porção relativamente menor na roleta. O ato de rodar a
roleta deve ser completamente aleatório, podendo ser simulado escolhendo-se um número
aleatório “r” no intervalo [0, 1] e comparar seu valor com a probabilidade acumulada iq ,
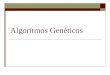
considerando 00 q . Assim, se ii qrq 1 deve-se selecionar o individuo ix . Na FIGURA
3 estão dispostos cinco pais, A, B, C, D e E com as suas respectivas aptidões (áreas dos
setores circulares), para serem selecionados através da roleta e gerarem uma nova população.
Observa-se que o indivíduo A tem maiores chances de ser escolhido ao rodar a roleta.
Figura 3 – Representação do processo de seleção via roleta. Fonte: Adaptado de Souza (2010)

33
O ato de rodar a roleta deve ser completamente aleatório, podendo ser simulado
escolhendo-se um número aleatório “r” no intervalo [0, 1] e comparar seu valor com a
probabilidade acumulada iq , considerando 00 q , expressão (05). Assim, se ii qrq 1
deve-se selecionar o individuo ix .
Essa etapa tem a desvantagem de possuir uma alta variabilidade, podendo levar a um
grande número de cópias de um bom cromossomo, diminuindo a diversidade da população,
podendo também causar uma convergência prematura do algoritmo para uma solução não
almejada. Quando a evolução esta avançada, onde as aptidões não diferenciam entre si, pode
causar uma estagnação do algoritmo, isto é, pouca modificação na seleção dos indivíduos.
2.4.6 Elitismo
O elitismo visa preservar os melhores cromossomos de uma geração para outra sem
alterações, garantindo sempre melhor solução encontrada em qualquer uma das gerações será
mantida até o final do processo. Geralmente usa-se nos Algoritmos Genéticos uma taxa de
elitismo de 30% do total de indivíduos gerados (LINDEN, 2008 e VIANA, 1998).
A principal vantagem deste método é que a convergência é garantida, isto é, se o
máximo global for descoberto, o Algoritmo Genético converge para esse máximo, entretanto,
da mesma forma existe o risco da estagnação em um máximo local.
2.4.7 Operadores genéticos
A função dos operadores genéticos é definir regras para a renovação eficaz de uma
população, com a finalidade de melhorar a qualidade genética de cada individuo. Existem
basicamente dois tipos de operadores genéticos:

34
operadores do tipo crossover (cruzamento), e
operadores do tipo mutação.
2.4.8 Crossover
O cruzamento ou crossover é em processo de recombinação de partes das seqüências
de caracteres entre pares de cromossomos, com o objetivo de gerar nova descendência. Esta
troca de material genético garante a recombinação da população, possibilitando, assim, uma
probabilidade maior de produzir indivíduos mais evoluídos que seus pais.
O operador crossover escolhe aleatoriamente dois pais e troca parte de seu padrão
genético. A escolha do ponto de corte do cromossomo é feita aleatoriamente; após esses
passos são gerados dois filhos em substituição aos pais. No cruzamento é usual atribuir um
percentual PX (indivíduos para cruzamentos), na faixa de 25% a 75% da população,
recomenda-se preservar os primeiros e últimos gens do cromossomo (LINDEN, 2008;
VIANA, 1998; RODRIGUES, 2009 e SOUZA, 2010).
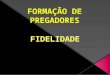
2.4.8.1 Um ponto de corte
Esta é a forma mais simples de cruzamento, onde dois indivíduos da população, após a
seleção, são submetidos ao processo de cruzamento, no qual um ponto de corte é gerado
aleatoriamente, os gens ou bits que precedem o ponto de corte são preservados, e os bits
posteriores são trocados entre o par participante do processo, como demonstra a figura a
seguir.

35
Figura 4 – Representação de cruzamento de um ponto de corte.
Fonte: O autor.
2.4.8.2 Dois pontos de corte
Segue a mesma idéia do cruzamento de um ponto, só que agora são gerados dois
pontos de corte, e somente os bits que estiverem nas extremidades dos cromossomos serão
trocados entre o par de cromossomos selecionados, os bits que ficarem entre os dois pontos
serão preservados, como demonstra a figura a seguir:
Figura 5 – Representação de cruzamento de dois pontos de corte.
Fonte: O autor
2.4.8.3 Pontos de Corte Uniforme
Neste cruzamento é gerada para cada par uma mascara de bits aleatórios que guiará a
troca do material genético. Se o primeiro bit da mascara possuir o valor 1, então o primeiro bit
do pai 2 é copiado para o primeiro bit do filho1. Caso contrário, o primeiro bit do pai2 é
copiado para o primeiro bit do filho1.

36
2.4.8.4 Cruzamento de mapeamento parcial (PMX)
O operador PMX consiste em passar as informações de ordem e de posição das rotas
dos pais para as rotas dos filhos, uma parte da seqüência dos pais são mapeadas e preservadas
no filho, a informação restante é trocada entre os pais, segue como exemplo P1 e P2, conforme
a figura abaixo.
Figura 6 – Exemplo de dois pais de cromossomos. Fonte: O autor.
Segundo os estudos de Malaquias (2006) o operador PMX consiste nos seguintes
passos:
1º passo: selecionar aleatoriamente dois pontos de corte nas seqüências que
representam as rotas dos pais;
2º passo: copiar a seqüência mapeada do P1 e inserir no f2, e copiar a seqüência
mapeada do P2 e inserir no f1;
Figura 7 – Escolha do ponto de corte no cruzamento PMX.
Fonte: O autor.
3º passo: preencher o f1 com copias dos elementos do P1,o mesmo ocorre com f2 e P2;

37
Figura 8 – Preenchimento do cromossomo filho no cruzamento PMX.
Fonte: O autor.
4º passo: caso um cliente já esteja presente no filho, ele é substituído por outro, na ordem da
esquerda para a direita, de acordo com os mapeamentos, como mostra a figura abaixo.
Figura 9 – Completando o cromossomo filho no cruzamento PMX. Fonte: O autor.
2.4.8.5 Operador de Cruzamento Edge Recombination (ERX)
Este operador foi desenvolvido especialmente para o problema do caixeiro viajante e
prioriza o fator adjacência. Segundo os estudos de Malaquias (2006) sua característica
principal é a de que um cromossomo filho deve ser construído sempre que possível a partir
das arestas de ambos os pais. De acordo com Malaquias (2006) em media 95 por cento das
arestas dos pais são transferidas para os filhos neste operador reduzindo consideravelmente o
percentual de arestas selecionadas aleatoriamente.

38
De acordo com Malaquias (2006, p 61)
“No ERX o significativo numérico de arestas transferidas de cromossomos
pais para cromossomos filhos é uma conseqüência do seguinte
procedimento: Criar uma lista de arestas de ambos os pais. A lista de arestas
para cada cidade, todas as outras cidades a ela conectadas em pelo menos um
dos cromossomos pais.”
Considerando o exemplo a baixo, supondo que (i j) = (j i).
P1 = (1 2 3 5 4 7 6)
P2 = (6 5 7 1 3 2 4)
A lista de arestas será:
cidade 1 (1, 2), (3, 1), (7, 1)
cidade 2 (1, 2), (2, 3), (2, 4)
cidade 3 (2, 3), (3, 5), (1, 3), (3, 2)
cidade 4 (5, 4), (4, 7), (2, 4)
cidade 5 (3, 5), (5, 4), (6, 5), (5, 7)
cidade 6 (7, 6), (6, 5)
cidade 7 (4, 7), (7, 6), (5, 7), (7, 1).
Segundo os textos de Malaquias (2006), neste operador pode-se a partir de dois
cromossomos pais gerarem um ou dois filhos. Para gerar um filho segue-se o seguinte
processo: seleciona-se a cidade inicial de um dos pais (cidade 1 e cidade 6, no exemplo
acima), relaciona-se a cidade inicial com o menor numero de arestas ( no nosso caso escolheu
a cidade 6). A cidade 6 esta diretamente ligada às cidades 5 e 7, a próxima cidade no
cromossomo filho será uma dessas cidades, aquela que possuir o menor numero de arestas, no
exemplo escolheu-se a cidade 7. O próximo gene do cromossomo filho será uma das cidades
conectadas diretamente a cidade 7 que possuir numero menor de arestas. Caso não existir
candidatos, a próxima aresta será escolhida aleatoriamente dentre as não pertencentes ao
cromossomo filho. O cromossomo filho será:
f1= (6 7 1 2 4 5 3)

39
2.4.8.6 Order Crossover OX
O operador order crossover explora a propriedade de representação do caminho, este
operador gera filhos a partir da escolha de uma seqüência parcial de cidades de um dos pais e
preserva a ordem relativa das cidades do outro pai, se importando com a ordem dos pais ao
invés de suas posições, segue como exemplo P1 e P2, conforme a figura abaixo.
Figura 10 – Exemplo de dois pais de cromossomos.
Fonte: O autor.
Segundo os estudos de Araújo (2008), o operador OX, segue os seguintes passos:
1º Passo: escolhem-se dois pontos de corte i e j, no nosso caso i = 3 e j = 7;
2º Passo: passar os genes entre i e j do cromossomo P1 no cromossomo f1;
Figura 11 – Escolha do ponto de corte no cruzamento OX. Fonte: O autor.
3º Passo: o cromossomo f1 é completado com os genes de P2 a partir do ponto j,
tomando cuidado de não inserir duas vezes o mesmo gene;
4º Passo: o mesmo ocorre com P2 e f2. De acordo com o exemplo abaixo:

40
Figura 12 – Completando o cromossomo filho no cruzamento PMX. Fonte: O autor.
2.4.8.7 Operador HX
Segundo Silva (2006) este operador utiliza informações heurísticas, como a distancia,
isto é, o tamanho dos arcos.
Segundo Silva (2006) o operador HX pode ser descrito da seguinte forma:
a) Escolhe-se uma cidade inicial aleatoriamente de um dos pais:
b) Comparam-se os arcos deixando a atual cidade em ambos os pais e selecione o
menor;
c) Se o menor arco escolhido formar um ciclo na rota parcial, então escolha um
arco aleatório que não introduza um ciclo;
d) Repita os passos “b” e “c” ate que todas as cidades sejam incluídas na rota.
2.4.8.8 Recombinação de Arestas
Podemos dizer que essa é uma das mais interessantes maneiras de se fazer o crossover
baseado em ordem. Também conhecida como edge recombination, ou ER.
Segundo LINDEN (2008) este método é baseado no conceito de que a informação
importante em um cromossomo não é a ordem dos nós, mas sim as arestas entre eles. Assim,
os filhos gerados pelo crossover devem ser baseados nas arestas entre os nós, e não na
ordenação relativa entre eles.

41
Segundo LINDEN (2008) apud Michalewicz (2002) cita experimentos que indicam
que a taxa de falha, em que não temos nenhuma aresta para escolher, é muito baixa (cerca de
1%). Ademais, o operador ER é interessante pois preserva características estruturais do grafo
subjacente à nossa representação, ao preservar as arestas entre os nós que o formam.
2.4.9 Mutação
Este operador é responsável pela introdução e manutenção da diversidade genética na
população. O operador de mutação inverte os valores de bits, ou seja, muda o valor de dado
bit de 1 para 0 ou de 0 para 1, com o objetivo de tentar regenerar algum individuo que possa
ter sido eliminado de forma inesperada. Para que uma determinada população não sofra
muitas alterações, esta operação é processada para um pequeno percentual PM de seus
elementos, em torno de 1% de todos os genes.
2.4.9.1 Mutação por troca (EM)
Para Malaquias (2006) “O operador de mutação por troca (Exchange mutation – EM)
aleatoriamente seleciona duas cidades na rota e troca suas posições”. A abaixo ilustra o
operador EM.
Figura 13 – Operação com operador de mutação EM
Fonte: O autor.

42
2.4.9.2 Mutação por inversão simples (SIM)
O operador SIM (simple inversion operator) seleciona aleatoriamente dois pontos de
corte na seqüência, e reverte a subseqüência entre os dois pontos de corte. A FIGURA 9
ilustra o operador SIM.
Figura 14 – Operação com operação de mutação SIM. Fonte: O autor.
2.4.9.3 Scramble Mutation (SM)
Este operador de mutação escolhe aleatoriamente uma sub-rota e mistura as cidades
dentre dela, conforme a figura abaixo:
Figura 15 – Operação com operador de mutação SM Fonte: O autor.

43
3 METODOLOGIA
“... não há ciência sem o emprego de métodos científicos.” (LAKATOS, 2001, p. 83).
Uma vez apresentados o objeto de estudo, a problemática, as questões de pesquisa, os
objetivos e a abrangência do trabalho, espera-se ter construído a base referência para o
desenvolvimento de uma ferramenta confiável e precisa que auxilie na roteirização de
veículos utilizando Algoritmos Genéticos como ferramenta de otimização, identificando,
quantificando e colocando em pratica oportunidades de melhoria com o objetivo de geral um
desempenho superior do sistema utilizado pela empresa.
Sendo o objetivo deste trabalho elaborar um programa de otimização de rotas de
distribuição no programa de simulação matemática MATLAB® utilizando os Algoritmos
Genéticos como ferramenta de otimização, foram definidas etapas para atingi-lo.
Primeiramente, identificou-se a necessidade de evidenciar a metodologia utilizada para
a execução do estudo de caso e a bibliografia necessária para dar o suporte conceitual para a
utilização da ferramenta de otimização.
Uma vez elaborado o modelo e revisados os estudos que, direta e indiretamente,
abordam o objeto de estudo, visando ilustrar a sua utilização, será realizada uma atividade de
coleta de dados e, posteriormente, simulações de roteiros, para a validação do estudo.
Por fim, serão apresentadas as conclusões e considerações finais do presente trabalho.
A seguir estão descritos os aspectos metodológicos considerados para a consecução
dos objetivos propostos do presente trabalho. Refere-se à metodologia utilizada para o
delineamento da pesquisa e no desenvolvimento do modelo conceitual para a utilização da
ferramenta em análise.
Lakatos (2001, p. 83) “o método é o conjunto das atividades sistêmicas e racionais
que, com maior segurança e economia, permite alcançar o objetivo – conhecimentos validos e
verdadeiros -, …, detectando erros e auxiliando as decisões do cientista.”

44
3.1 CARACTERISTICA DA PESQUISA
A pesquisa é do tipo exploratória, de acordo com Gil (1999, p. 43) “ as pesquisas
exploratórias têm como principal finalidade desenvolver, esclarecer e modificar conceitos e
idéias, tendo em vista formulação de problemas mais precisos ou hipóteses pesquisáveis para
estudos posteriores”.
A pesquisa é quanti-qualitativa, pois em alguns momentos apresenta característica de
pesquisa quantitativas, procurando mensurar os resultados, e em outros, apresenta
características qualitativas, sendo possível descrever situações.
A pesquisa será fundamentada por meio de Fontes Bibliográficas, partindo de
referências teóricas já publicadas em documentos e coleta de dados.
3.2 INSTRUMENTOS DE COLETA DE DADOS
As técnicas selecionadas para obtenção de dados e informações foram: Entrevistas
com os responsáveis pelo setor logístico da empresa; realização de observação simples e
realização de pesquisas bibliográficas.
3.3 INSTRUMENTOS PARA TRATAMENTO E ANÁLISE DE DADOS
Para o tratamento dos dados coletados será utilizado o programa matemático
MATLAB® para a simulação de roteiros e para a programação de um roteiro otimizado.

45
4. O CASO EM ESTUDO
Queremos resolver um problema de roteirização na entrega de bebidas de uma
empresa fictícia de distribuição de bebidas situada na cidade de Campo Grande – MS. O
problema se trata em otimizar uma rota de distribuição de bebidas no programa de simulação
matemática MATLAB® utilizando os Algoritmos Genéticos como ferramenta de otimização,
a fim de encontrar a menor distância possível a ser percorrida entre o centro de distribuição e
os clientes dentro de um roteiro de entrega.
Existe um centro de distribuição denominado de Cliente 1 (C1) e nove pontos de
entregas que variam a denominação de Cliente 2 (C2) a Cliente 10 (C10). No protótipo
implementado para resolver esse problema eles são representados pelas coordenadas
cartesianas em um mapa. Estas coordenadas permitem o calculo da distância linear entre dois
pontos quaisquer. A distância entre os pontos serão utilizadas para o cálculo da distância total
percorrida na rota a ser otimizada.
Para a resolução deste problema foi utilizado algumas simulações no software
matemático Matlab, com o objetivo de modelar e validar o programa.
O problema a ser resolvido possui as seguintes características descritas ao longo deste
capitulo, e seguiu o fluxograma desenhado na FIGURA 2 (página 29).
4.1 INICIAR
Esta etapa consiste em iniciar o programa, ou seja, inserir as características e
configurações necessárias para a realização do programa.
Na elaboração do programa no software Matlab, inserimos algumas entradas que
representam as características e restrições do problema proposto, tais como:
N=10;
n=100

46
P= 10-3
;
TE= 20%;
TC= 80% e
TM= 2 %
Onde N representa os números de clientes do roteiro; n representa o tamanho da
população a ser gerada, P representa a precisão ou “eficiência” do roteiro proposto; TE
representa a taxa de elitismo, TC representa a taxa de cruzamento e TM representando a taxa
de mutação.
Após a introdução dos dados foi elaborado uma matriz, que contém as localizações
dos clientes e o Centro de Distribuição (CD) em coordenadas geográficas ou cartesianas. As
distâncias calculadas entre um cliente e os demais e as distâncias calculadas entre os clientes e
o CD. A tabela abaixo mostra as distâncias calculadas entre as cidades.
Tabela 3 – Tabela das distâncias calculadas
Fonte: O autor.
No qual o CD é representado pelo Cliente 1, isto para facilitar o entendimento e a
visualização do problema, lembrando que as distâncias estão valoradas em unidades de
quilômetros. A FIGURA 16 representa as localizações dos clientes.

47
Figura 16 – Localização dos clientes no plano cartesiano. Fonte: O autor.
4.2 GERAR A POPULAÇÃO INICIAL
Após a introdução dos dados, é gerada a primeira população, ou população inicial.
Esta etapa consiste na escolha aleatória de n roteiros possíveis a serem utilizados, respeitando
todas as limitações e características do problema.
Neste trabalho utilizamos a representação ordinal, onde cada cliente é representado por
um algoritmo. A figura abaixo mostra as 10 primeiras rotas possíveis a ser utilizadas,
observando que o CD (representado por 1) deve aparecer como ponto de partida e como ponto
de chegada da rota.
Figura 17 – Trecho da população inicial gerada no software Matlab.
Fonte: O autor.

48
Figura 18 – Representação da 1º rota possível no plano cartesiano. Fonte: O autor.
4.3 FUNÇÃO DOS CUSTOS/DISTÂNCIA
Após a escolha das possíveis rotas a serem utilizadas, são calculados os custas dessas
rotas.
Cada possível solução é avaliada por uma função custo, indicando a qualidade da
solução. Por meio deste valor calculado pela função custo para cada solução disponível, é
possível comparar as diversas soluções disponíveis e escolher a(s) melhore(s).
Podemos dizer que a função custo é utilizada para medir a aptidão de cada
cromossomo, que representa uma solução para o problema.
Para este problema a função custo utilizada calcula a distância total de todos os
roteiros incluídos no cromossomo, o custo de uma solução é a soma das distâncias percorridas
dentro do roteiro.
Por ser um problema de minimização os custos são representados pelo inverso dos
custos de cada rota, para que possa ser usado o algoritmo de maximização, obtendo a 12º
coluna da FIGURA 19.

49
Figura 19 – Trecho da população inicial, contendo o cálculo das distâncias, gerada no
software Matlab. Fonte: O autor.
4.4 SELEÇÃO
Na resolução deste problema foi utilizado o método da roleta viciada, que consiste em
selecionar as melhores rotas, duplicando-as e substituindo no lugar das rotas menos viáveis a
ser percorridas.
Para a realização da roleta viciada, inicialmente calculou-se a probabilidade de uma
rota ser escolhida conforme a sua distância em relação às outras possíveis rotas, a rota que
apresenta a menor distância a ser percorrida recebe uma probabilidade maior de ser escolhida
dentre as demais.
O ato de se rodar a roleta consiste em gerar n números aleatoriamente dentro de um
intervalo [0, 1] e comparar seu valor com a probabilidade acumulada, escolhendo assim a rota
que melhor satisfaça, em relação a probabilidade acumulada, o numero resultante da roleta.
4.5 ELITISMO
Neste problema foi utilizada um taxa de elitismo com valor de 20%, isto é, após o
processo de seleção descrito acima, escolhemos e separamos 20% da população para a
próxima geração. A figura abaixo mostra o trecho do programa utilizado no software Matlab.

50
Figura 20 – Trecho da operação de elitismo no software Matlab. Fonte: O autor.
4.6 CRUZAMENTO
Utilizamos o Cruzamento de Mapeamento Parcial (PMX), para a realização deste
problema, por apresentar a vantagem de manter uma parte seqüência preservada. A figura
abaixo mostra o trecho do programa utilizado no software Matlab.

51
Figura 21 – Trecho da operação de cruzamento PMX no software Matlab.
Fonte: O autor.
4.7 MUTAÇÃO
Utilizamos a Mutação por Troca (EM), na qual são selecionados aleatoriamente dois
clientes dentro da rota e trocadas de posição. Neste processo utilizamos uma taxa mutação
(TM) igual a 2% da população. . A figura a baixo mostra o trecho do programa utilizado no
software Matlab.

52
Figura 22 – Trecho da operação de mutação EM no software Matlab.
Fonte: O autor.
O capitulo a seguir apresentará o resultado e a analise dos dados sobre esse problema
de roteirização.

53
5 APRESENTAÇÃO DOS DADOS
Neste capitulo é apresentado os resultados obtidos com os Algoritmos Genéticos como
ferramenta de otimização de um roteiro de distribuição de bebidas, continuando a seguir o
fluxograma desenhado na FIGURA 2 (página 29).
5.1 MELHOR ROTA
Este é a ultimo etapa do processo, no qual é escolhida a melhor rota, nesse problema
utilizamos um numero máximo de interações na igualdade de 500 interações a ser realizadas
pelos Algoritmos Genéticos.
A melhor rota encontrada atingiu essas 500 interações em torno de 1 minuto
computacional. A figura a seguir mostra a melhor rota para a resolução do problema na forma
de programação.

54
Figura 23 – Trecho população final gerada no software Matlab. Fonte: O autor.
Na FIGURA 24 esta desenhada a melhor rota determinada através dos Algoritmos
Genéticos, com uma quilometragem total percorrida equivalente ao calculo do inverso do
valor ótimo obtido na FIGURA 23.
A figura a baixo representa a melhor solução obtida para a resolução do problema na
forma de representação em plano cartesiano.

55
Figura 24 – Representação da rota com menor custo no plano cartesiano. Fonte: O autor.
A melhor rota obtida teve um valor máximo de 1/0.0130, isto é, esta rota obteve um
custo/distância aproximado de 76,9 km. Assim a melhor rota envolve o seguinte percurso entre
os clientes: C1, C8, C7, C6, C10, C5, C3, C4, C9, C2 e C1.
O capítulo a seguir apresentará a análise dos dados obtidos.

56
6 ANALISE DOS DADOS
Comparando a primeira com a ultima interação, podemos ver uma melhora
significativa tanto em relação a diminuição da distância como em relação a visualização do
roteiro.
O gráfico a seguir apresenta a relação entre o custo e o número de interações no
processo de otimização do roteiro.
Gráfico 1 – Relação Custos x Interação na resolução na resolução do problema
Fonte: O autor
Como podemos analisar no gráfico acima, houve uma melhora de cerca de 43,8% na
redução do custo/distância na melhor rota em relação com primeira possível rota proposta na
primeira interação, ou seja, houve uma redução de aproximadamente de 100 km na melhor
rota proposta pelo Algoritmo Genético.
As figuras apresentados a seguir, mostram de forma visual, as possíveis rotas criadas
no processo de otimização do roteiro de distribuição.
175,439
102,041
76,923
0,000
20,000
40,000
60,000
80,000
100,000
120,000
140,000
160,000
180,000
1˚
25˚
50˚
75˚
100˚
125˚
150˚
175˚
200˚
225˚
250˚
275˚
300˚
325˚
350˚
375˚
400˚
425˚
450˚
475˚
500˚
Cu
sto/d
istâ
nci
a
Interação
Relação Custo x Interação

57
A figura abaixo se refere a uma possível rota, na qual o custo/distância é igual a
129,87 km para percorrer todo o roteiro.
Figura 25 – Representação de uma possível rota encontra pelo Algoritmo Genético.
Fonte: O autor
A figura abaixo apresenta uma possível rota, na qual o custo/distância é igual a 104,16
km para percorrer todo o roteiro.

58
Figura 26 – Representação de uma possivel rota encontra pelo Algoritimo Genético.
Fonte: O autor
A figura abaixo apresenta uma possível rota, na qual o custo/distância é igual a 90,1
km para percorrer todo o roteiro.
Figura 27 – Representação de uma possivel rota encontra pelo Algoritimo Genético. Fonte: O autor

59
A figura abaixo apresenta a melhor rota, na qual o custo/distância é igual a 76,92 km
para percorrer todo o roteiro
Figura 28 – Melhor rota encontrada pelo Algoritimo Genético. Fonte: O autor

60
7 CONCLUSÃO
Os resultados podem ser considerados bons, visto que o objetivo do trabalho, que era
otimizar uma rota de distribuição de bebidas, utilizando os Algoritmos Genéticos como
ferramenta de otimização, foi alcançado.
Os Algoritmos Genéticos se mostraram uma ferramenta eficiente na otimização de
problemas complexos, como no caso de problemas relacionados à roteirização, alem de não
necessitar nenhuma propriedade especial sobre a função objetiva, como derivabilidade, por
exemplo.
Os Algoritmos Genéticos possuem a desvantagem de demandarem um grande tempo
computacional no momento de seu desenvolvimento ou primeira programação, se comparados
com outros algoritmos clássicos. Os Algoritmos Genéticos possuem a vantagem de, após
gerada a população inicial, realizar melhorias sobre a mesma no espaço de busca, visando a
otimização da função, não necessitando uma nova programação a cada vez que se for criada
um novo roteiro de distribuição ou otimizar um roteiro de distribuição.
O uso do software Matlab foi de extrema importância na execução deste trabalho, pois
o mesmo possui uma ferramenta especial dedicada aos Algoritmos Genéticos, facilitando
sobre maneira o seu uso em aplicações práticas.
Sendo assim, os Algoritmos Genéticos se comprovam como uma importante
ferramenta de otimização no auxilio da tomada de decisão, especialmente na Gestão Logística
– roteirização de veículos – como sendo um dos objetivos deste trabalho.

61
REFERÊNCIAS
ALVARENGA, Antonio Carlo e NOVAES, Antonio Galvão N.. Logística aplicada:
suprimento e distribuição física. 3 ed. 1 reimpr. São Paulo: Edgard Blücher, 2002.
ARAÚJO, Carlos Eduardo di Giacomo. Algoritmos Genéticos Híbridos sem delimitadores de
rotas para problemas de roteirização de veículos. São Paulo, 2008. Dissertação (Mestrado em
Engenharia) – Escola Politécnica da Universidade de São Paulo.
BALLOU, Ronald H. Gerenciamento da cadeia de suprimentos: planejamento,
organização e logística empresarial. 4 ed. Porto Alegre: Bookman, 2001.
BELFIORE, Patrícia Prado; FÁVERO, Luiz Paulo Lopes. Problema de roteirização de
veículos com janelas de tempo: revisão da literatura. In SIMPÓSIO DE ENGENHARIA DE
PRODUÇÃO, XIII. 2006, Bauru. Anais. Bauru: SIMPEP, 2006.
BOWERSOX, Donald J. e CLOSS, David J. Logística empresarial: o processo de integração
da cadeia de suprimento. 1 ed. 1 reimpr. São Paulo: Atlas, 2007.
BREGALDA, P. F.; OLIVEIRA, A. F. de e BORNSTEIN, C. T. Introdução à Programação
Linear. Rio de Janeiro: Campus, 1988.
ENOMOTO, Leandro Minoru. Análise da distribuição física e roteirização em um
atacadista da sul de Minas Gerais. Itajubá, 2005. Dissertação (Mestrado em Ciências em
Engenharia de Produção) – Programa de Pós-Graduação em Engenharia de Produção da
Universidade Federal de Itajubá.
FARKUH NETO, Alberto; LIMA, Renato da Silva. Roteirização de veículos de uma rede
atacadista com o auxílio de Sistemas de Informações Geográficas (SIG). In ENCONTRO
NACIONAL DE ENGENHARIA DE PRODUÇÃO, XXV. 2005, Porto Alegre. Anais. Porto
Alegre: ENEGEP, 2005.
FIGUEIREDO, Kleber Fossati; FLEURY, Paulo Fernando e WANKE, Peter (Org). logística
e gerenciamento da cadeia de suprimentos: planejamento do fluxo de prodetos e dos
recursos. 1 ed. 3 reimpr. São Paulo: Atlas, 2006.
GIL, Antônio Carlos. Métodos e técnicas de pesquisa social. 5 ed. São Paulo: Atlas, 1999.

62
GOLDBARG, M. C. e PACCA, H. L. L. Otimização Combinatória e Programação
Linear: Modelos e Algoritmos. Rio de Janeiro: Campus, 2000.
GUERVÓS, J. J. M. Informática Evolutiva: Algoritmos Genéticos. Disponível em:
http://geneura.urg.es/~jmerelo/ie/ags.htm. Acesso em: 05 jun. 2009.
KOBAYASHI, Shun’ichi. Renovação da logística: como definir as estratégias de
distribuição física global. 1 ed. São Paulo: Atlas, 2000.
LAKATOS, Eva Maria, MARCONI, Marina de Andrade. Fundamentos da metodologia
científica. 4 ed. São Paulo: Atlas, 2001.
LINDEN, R. Algoritmos Genéticos: uma importante ferramenta da inteligência
computacional. 2 ed. Rio de Janeiro: BRASPORT, 2008.
LOESCH, Claudio; HEIN, Nelson. Pesquisa Operacional: fundamentos e modelos. 1 ed.
Blumenau: FURB, 1999.
MALAQUIAS, Neli Gomes Lisboa. Uso dos Algoritmos Genéticos para a otimização de
rotas de distribuição. Uberlândia, 2006. Dissertação (Mestrado em Ciências) – Programa de
Pós-Graduação em Engenharia Elétrica da Universidade Federal de Uberlândia.
MANFROI, Armando Staudt. A logística de transporte e as cadeias agropecuárias avícola
e suinícola, impacto social e econômico no desenvolvimento local do município de Toledo
– PR. Santa Maria, 2008. Dissertação (Mestrado em Engenharia de Produção) – Programa de
Pós-Graduação em Engenharia de Produção, Área de Concentração em Qualidade e
Produtividade da Universidade Federal de Santa Maria.
MATSUMOTO, Élia Yathie. Matlab®7: fundamentos. 1 ed. São Paulo: Érica, 2004.
MAURI, Geraldo Regis. Uma nova abordagem para o problema de roteirização e
programação de veículos. São José dos Campos, 2006. Monografia ( Doutorado em
Computação Aplicada) – exame de qualificação do Curso de Computação Aplicada do
Instituto Nacional de Pesquisas Espaciais.
MIRANDA, M. N. de. Algoritmos Genéticos: Fundamentos e Aplicações. Disponível em:
http://www.gta.ufrj.br/~marcio/genetic.html. Acesso em: 05 jun. 2009.
NOGUEIRA, Karina Pessoa. Abordagem logística da distribuição física: uma revisão da
literatura. Revista da FARN. Natal, v. 5, nº 1/2, p. 13-25, jan./dez. 2006.

63
NOVAES, Antonio Galvão. Logística e gerenciamento da cadeia de distribuição. 1 ed. Rio de
Janeiro: Elsevier, 2007.
RODRIGUES, Wesley Osvaldo Pradella; SOUZA, Celso Correia de; REIS NETO, José
Francisco dos. Uma ferramenta para suporte à decisão no planejamento de produção de uma
indústria utilizando Algoritmos Genéticos. In: ADMPG, II. 2009, Ponta Grossa: ADMPG,
2009.
SILVA JUNIOR, O. S.; LOPES, Luiz Antônio Silveira; BERGMANN, U.. Roteirização de
veículos com múltiplos depósitos em Sistema de Informação Geográfico Livre. In:
ASSOCIAÇÃO NACIONAL DE PESQUISA E ENSINO EM TRANSPORTE, XXIII. 2009,
Vitória. Anais. Vitória: ANPET – Congresso de Pesquisa e Ensino em Transporte, 2009.
SILVA, Anderson Freitas; OLIVEIRA, Antonio Costa de. Algoritmos Genéticos: alguns
experimentos com os operadores de cruzamento (“Crossover”) para o problema do caixeiro
viajante assimétrico. In: ASSOCIAÇÃO BRSILEIRA DE ENGENHARIA DE PRODUÇÃO,
XXVI. 2006, Fortaleza. Anais. Fortaleza: ABEPRO – Encontro Nacional de Engenharia de
Produção (ENEGEP), 2006.
SOUZA, Celso Correia de, et. Al. Uso de Algoritmos Genéticos como ferramenta auxiliar
no processo decisório em atividades de gestão empresarial. [S. I]: [s. n.], 2010. 14 p.
SOUZA, Darlon Orlamünder de. Algoritmos Genéticos aplicados ao planejamento do
transporte principal de madeira. Curitiba, 2004. Dissertação (Mestrado em Ciências
Florestais) – Programa de Pós-Graduação em Engenharia Florestal, Setor de Ciências
Agrárias da Universidade Federal do Paraná.
VIANA, G. V. R. Meta-heuristicas e programação paralela em otimização combinatória.
1 ed. Fortaleza: EUFC, 1998.