Embed Size (px)
Citation preview

Évaluation de l’adhérence mobilisable et de la résistance au roulement d’un PL
(modèles et simulations numériques)
Auteur : Mohamed Bouteldja/Cerema-CE/[email protected]
AIPCR 2016« Route du futur et évolutions des pneumatiques »
Michelin, Clermont-Ferrand 15 Dec. 2006

Pourquoi s’intéresser au contact pneu/sol
� Adhérence
� Constat :
- Phénomène physique qui s'oppose au roulement(mouvement), il s'apparente aux frottements, mais estde nature différente dû à la déformation élastique despneumatiques.
- Liée à la déformation du pneumatique,- En lien directe avec la dissipation d’énergie,…
� Résistance au roulement
� Indépendances (méthodes et paramètres mesurés, politiques de mesure, …).
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR
…..Elle est le seul lien entre le véhicule et la rou te.
Bien que la surface de contact est petite ….
- Capacité à mobiliser les forces de contact pneu-chaussée sous l’effet des sollicitation engendrées parla conduite du véhicule.
- Liée à la déformation de la surface de contact,- En lien directe avec le risque d’accident,…

Facteurs d’influence
� Facteurs principaux qui influencent : adhérence & r ésistance au roulement
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR

II faut donc maximiser l’adhérence et minimiser la résistance au roulement
� Compromis optimal afin de concilier ces deux performances
• SECURITÉ– tenue de route (meilleure adhérence quelque soit les
conditions de conduite),– stabilité du véhicule (notamment en courbe),– distance de freinage,– visibilité (nuit, pluie, ...).
• CONFORT– surface « roulante »,– peu bruyante,– faible résistance au roulement (consommation de carburant).
Enjeux et attentes de l’usager
Risques
Economie d’énergie
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR

• 1er étape
� modélisation fine du contact pneumatique/chaussée;� développement d’un estimateur de l’adhérence mobilisable et de la force de résistance au roulement,� validation par simulation numérique.
• 2ème étape
� validation expérimentale de l’approche développée;� développement d’un système prédictif d’aide à la conduite embarqué de « sécurité et d’économie d’énergie»
� Compromis « Sécurité/Consommation » � fonction de la situation de conduite
Actions engagées
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR

� Modèle du véhicule
( ) ( ) ( )],,,,,,[
,
sttfsttt yyxq
qGqqqCqqM
ββψψ=Γ=++ &&&&
� Les actions des couples appliqués : braquage des roues
� Forces externes : pneumatiques.
� Forces internes : suspensions, frottements.
: Vecteur des forces (internes et appliquées)Γ
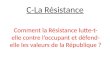
� Véhicule de type Tracteur semi-remorque
� Formalisme de Lagrange : calcul des équations dynamiques.
� Langage de calcul symbolique (Maple).
� M : matrice d’inertie, C : matrice de coriolis et centrifugeet G : la matrice de gravitation.
Modélisation du véhicule
xu
ψf
lt
ψ
l
Fxt
Fyt
Ffx
δ
Fry
Frx
Fyar
β1
β2
ay-t
ay-st
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR

* Travail réalisé en collaboration avec Prof. R. Merzouki (LAGIS)
Modélisation multi-physique du contact pneumatique/chaussée
� Modèle du pneumatique
� Approche bond graph : calcul des équations dynamiques.
� Langage de calcul : logiciel Symbols@/Matlab.Environment
0.:
s
h
η
Road
way
Lin
ear velocity
xF
Wave front
C: k
0
1g
T
S&
TF
RS
1
0
IF
sFCF
RSF
sx&
Tire gum (longitudinal)
Tire tube
Wheel
Angular velocity
I: M
1
1
C: ke R: Re
: -r
Sf: ω
Sf
L:x&
Roadway
1x& R:RN
10
1
C:KN
FN
I: M
2-x&Sf:
0
1
R: R1
C
T
S&
Two ports element
TF
( )32
..
. 13
lπ −
Se: T0
0 0S T&
GYhF
MSf:
Tire gum
(vertical)
sx&
Environment
0.:
s
h
η
Road
way
Lin
ear velocity
xF
Wave front
C: k
0
1g
T
S&
TF
RS
1
0
IF
sFCF
RSF
sx&
Tire gum (longitudinal)
Tire tube
Wheel
Angular velocity
I: M
1
1
C: ke R: Re
: -r
Sf: ω
Sf
L:x&
Roadway
1x& R:RN
10
1
C:KN
FN
I: M
2-x&Sf:
0
1
R: R1
C
T
S&
Two ports element
TF
( )32
..
. 13
lπ −
Se: T0
0 0S T&
GYhF
MSf:
Tire gum
(vertical)
sx&
xF
ZF
Actionhydrolique
Actions pneumatique et
thermique
Action mécanique
Action mécanique
Action mécanique
Action environnement
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR

� Adhérence mobilisable pour l’ensemble tracteur semi-remorque
� Résistance au roulement pour l’ensemble tracteur semi-remorque
ΣΣ
=
ΣΣ=
)cos(,
,
fz
yymob
z
xxmob
F
F
F
F
ψµ
µ v
• Estimation de la dynamique du véhicule,• Estimation des forces de contact
pneumatique/chaussée.
zrrRR FCF ⋅=
Force de résistance au
roulement
Coefficient de résistance au
roulement
Force de verticale
Évaluation de l’adhérence et de la résistance au roulement
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR

nombre d’états mesurés par des capteurs < nombre d’états d’un système
Définition :Un observateur est un capteur informatique ou logiciel permettant desuivre l’évolution de l’état d’un système (Reconstituer le vecteur d’état) àpartir de la connaissance :
Solution � Utilisation d’observateurs
Pour des raisons de coût et de faisabilité technique
�
� des sorties capteurs (mesures).
� d’un modèle du système.
Principe d’estimation de l’adhérence et de la résistance au roulement
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR

Modèles
État dynamiqueVariablesmesurées
VariableNon mesurées
ObservateursEstimateurs
Connaissance de l’état global et des forces de
contact pneumatique/chaussée
Capteurs logiciels basés sur la théorie de la dynamique des systèmes
• Modèle du système
• Observateur
termes correcteurs
Structure de l’observateur/estimateur
Principe d’estimation de l’adhérence et de la résistance au roulement
Obs.3
Obs.1
Obs.2
Obs.4
Cal.3
ya
xa
xvfψψ ,
ya
iww ,
fψψ ,
iΓ
iyF,
ˆ
iyF,
ˆ
ixF ,ˆ
ixF ,ˆ
izF ,ˆ
xa
xv
fψ̂mobµ
RRF
iiyv β̂,ˆ ,
fψ̂
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR

Résultats de Simulation
Observateurs d’état & forces
Résultats d’observation & d’estimation
Estimateurs
0 100 200 300 400 500 600-50
-40
-30
-20
-10
0
10
Position du CdG/XE en [m]
Pos
ition
du
CdG
/YE
en [m
]
Position du CdG du tracteur
Position du CdG de la semi-remorque
0 100 200 300 400 500 600-50
-40
-30
-20
-10
0
10
Position du CdG/XE en [m]
Pos
ition
du
CdG
/YE
en [m
]
Position du CdG du tracteur
Position du CdG de la semi-remorque
0 5 10 15 20 25 30 35 40 45-6
-4
-2
0
2
4
6
Temps en [s]
Ang
le d
e br
aqua
ge d
es r
oues
en
[°]
Roue avant gauche du tracteur
Roue avant droite du tracteur
0 5 10 15 20 25 30 35 40 45-6
-4
-2
0
2
4
6
Temps en [s]
Ang
le d
e br
aqua
ge d
es r
oues
en
[°]
Roue avant gauche du tracteur
Roue avant droite du tracteurC
omm
ande
con
duct
eur
Paramètres d’observateur
� Conditions de simulation : vitesse constante et chaussée sec.
L1= 1.02 e1= 2.64
L2= 1.04 e2= 2.61
L3= 1.11 e3= 4.13
L4= 1.08 e3= 0.27
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR

0 5 10 15 20 25 30 35 40 4548.5
49
49.5
50
50.5
Temps en [s]
Vite
sse
de C
dGen
[m/s
]
0 5 10 15 20 25 30 35 40 45-1
-0.5
0
0.5
1
Temps en [s]
Vite
sse
de la
cet d
u tr
acte
ur e
n [°
/s]
0 5 10 15 20 25 30 35 40 45-6
-4
-2
0
2
4
Temps en [s]
Vite
sse
de la
cet r
elat
if en
[°/s
]
Estimée/observateur
Simulée/Prosper
Estimée/observateur
Simulée/Prosper
Estimée/observateur
Simulée/Prosper
(a)
(b)
(c)
Résultats de Simulation
0 5 10 15 20 25 30 35 40 45-4
-2
0
2x 10
4
Temps en [s]
Fy,
av e
n [N
]
0 5 10 15 20 25 30 35 40 45-4
-2
0
2x 10
4
Temps en [s]
Fy,
ar e
n [N
]
0 5 10 15 20 25 30 35 40 45-1
-0.5
0
0.5
1x 10
4
Temps en [s]
Fy,
t en
[N]
Estimée/observateur
Simulée/Prosper
Estimée/observateur
Simulée/Prosper
Estimée/observateur
Simulée/Prosper
(d)
� Reconstruction de l’état dynamique du PL ainsi que les forces latérales.
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR

max, µµ ≤=z
yymob F
F
� Reconstruction de l’adhérence mobilisée.
Note : Adhérence maximale disponible sur la route est mesurée par l’appareil SCRIM.
Résultats de Simulation
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR
0 5 10 15 20 25 30 35 40 450
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
Temps [s]
Adh
éren
ce m
obili
sabl
e
Roue Av du tracteur
Roue Ar du tracteurRoue de la semi-remorque

15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR
Résultats de Simulation
� Reconstruction de la résistance au roulement.
0 5 10 15 20 25 30 35 40 45-700
-600
-500
-400
-300
-200
-100
Temps [s]
For
ce d
e ré
sist
ance
au
roul
emen
t [N
]
Roue Av du tracteur
Roue Ar du tracteur
Roue de la semi-remorque
0 5 10 15 20 25 30 35 40 45-1560
-1540
-1520
-1500
-1480
-1460
Frr
tot
ale
du t
ract
eur
[N]
Résistance au roulemet total du tracteur
0 5 10 15 20 25 30 35 40 45-1750
-1700
-1650
-1600
-1550
Temps [s]
Frr
tot
ale
de la
sei
m-r
emor
que
[N] Résistance au roulemet total de la semi-remorque

15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR
Résultats de Simulation
� Reconstruction du coefficient de résistance au roulement et distribution de l’erreur d’estimation.

Conclusions et perspectives
• Validation expérimentale,
• Élargir le problème d’estimation au modèle du véhicule global.
• Développement d’un système « sécuritaire et économique » embarqué.
�Perspectives
�Conclusions
• Modélisation nominale d’un véhicule articulé (tracteur semi-remorque),
• Modélisation du contact pneumatique/chaussée pas l’approche bond graph,
• Définition d’un observateur (reconstruction de l’état dynamique et des forces
pneumatique/chaussée),
• Reconstruction d’adhérence mobilisée et de la résistance au roulement,
• Validation pas simulation numérique.
15/12/2016 – Mohamed Bouteldja Séminaire 2016 AIPCR

Merci de votre attention
Mohamed BOUTELDJA
Département Laboratoire de Lyon25, avenue François Mitterrand, 69674 Bron cedex
Tel : 04.72.14.33.27 [email protected]
Contact