Embed Size (px)
DESCRIPTION
Válvulas Proporcionales y Servoválvulas
Citation preview
VÁLVULAS PROPORCIONALESY SERVOVÁLVULAS
VÁLVULAS PROPORCIONALES Y SERVOVÁLVULAS
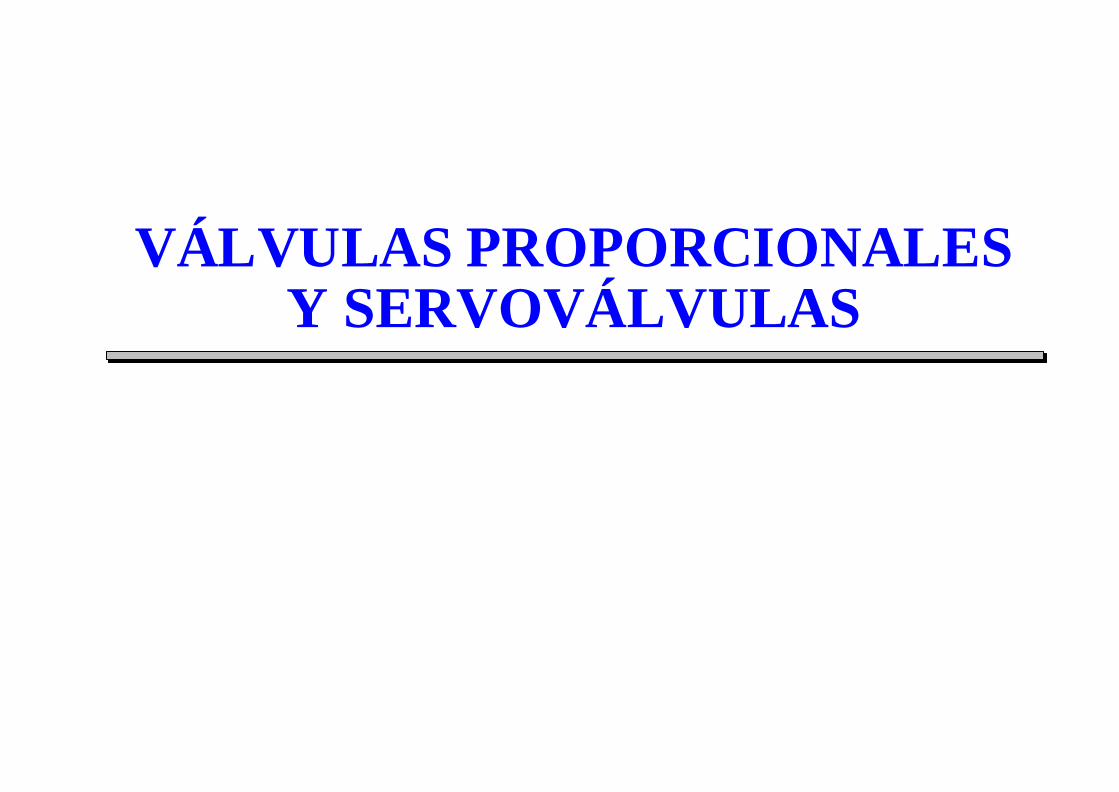
CONTROL Y ACCIONAMIENTO
SERVOVÁLVULA (Lazo Cerrado)
• Realimentación de la señal de posición dela carga. Posicionamiento muy preciso
• Accionamiento mediante par motor
OBJETIVOS
Control aceleraciones -deceleracionesRegulación presiones / caudalesIncorporación en cadena de control
MAGNITUDES DE INTERÉS
Fuerza ºº PresiónVelocidad ºº CaudalPosición ºº Volumen
VÁLVULA PROPORCIONAL (Bucle Abierto)
• La posición de la corredera no guarda ningunarelación con la posición de la carga
• Accionamiento por electroimán proporcional
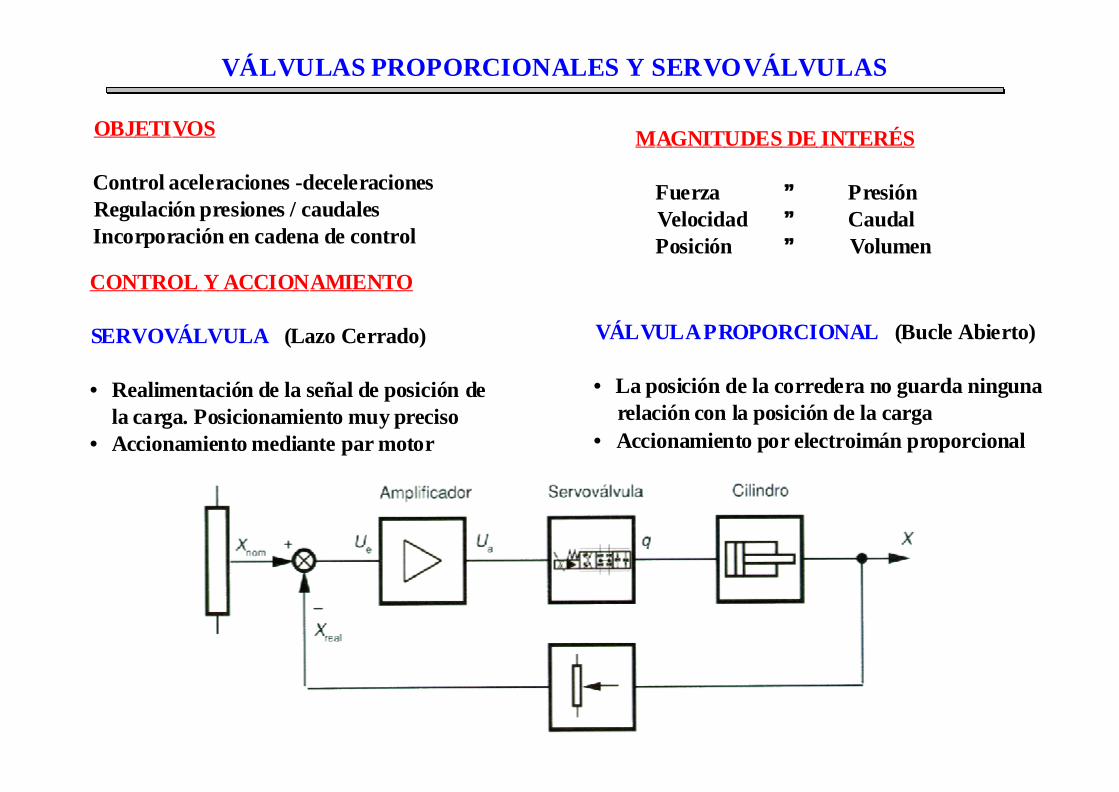
VÁLVULA PROPORCIONAL DIRECCIONAL PILOTADA
Válvula Piloto
Válvula Principal
MuelleTensor Corredera principal
Accionamientos
Cámarasde mando
Alimentación / descargade aceite piloto externas
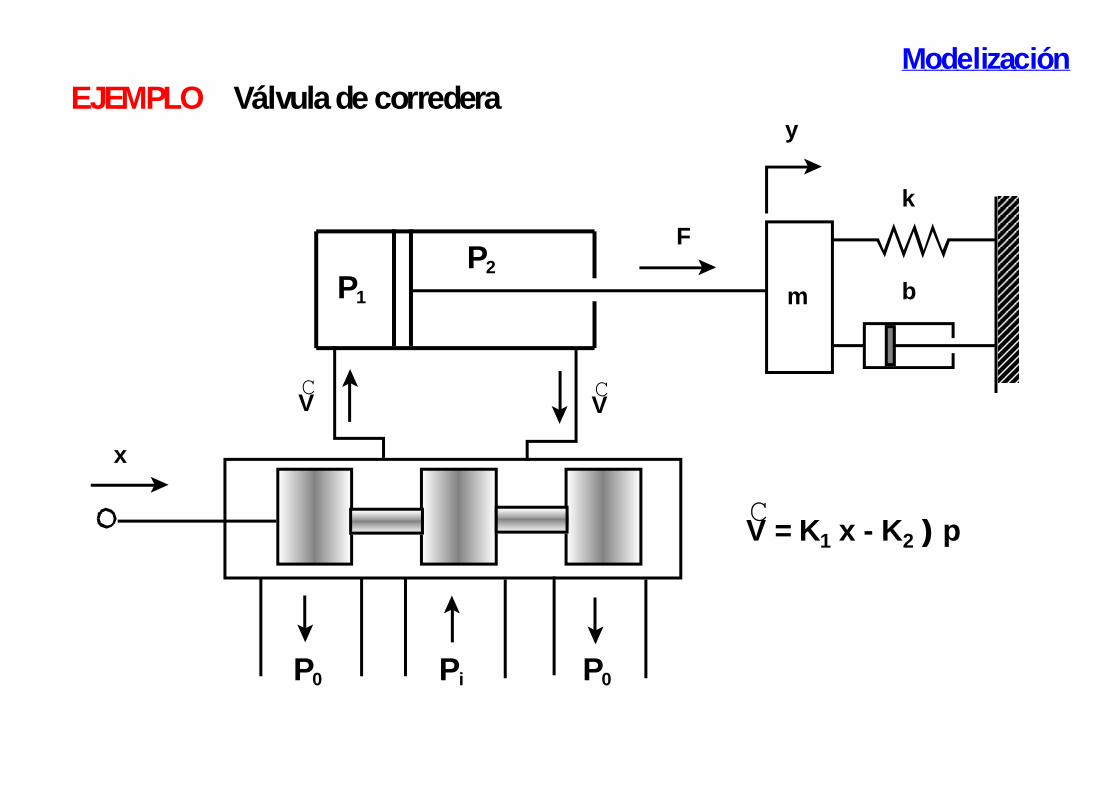
ModelizaciónEJEMPLO Válvula de corredera
P0 P0Pi
m
k
b
F
y
P1
P2
VC
VC
x
V = K1 x - K2 ))pC
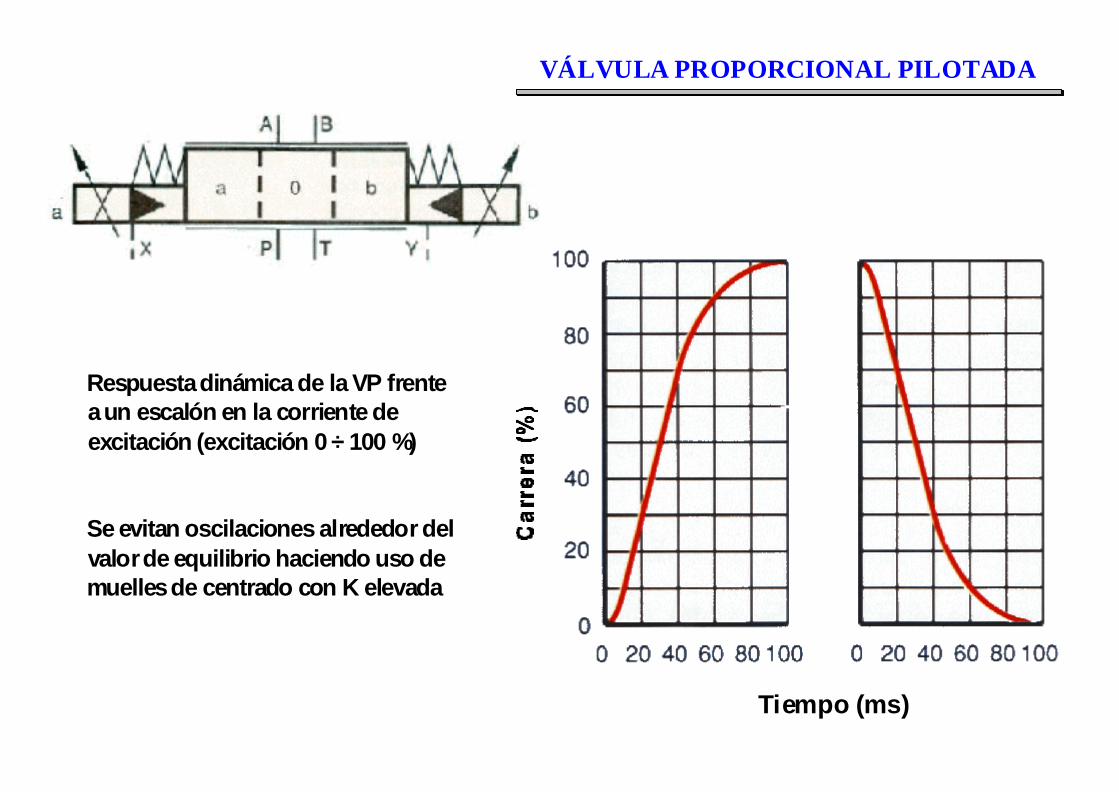
VÁLVULA PROPORCIONAL PILOTADA
Tiempo (ms)
Respuesta dinámica de la VP frentea un escalón en la corriente deexcitación (excitación 0 ÷ 100 %)
Se evitan oscilaciones alrededor delvalor de equilibrio haciendo uso demuelles de centrado con K elevada
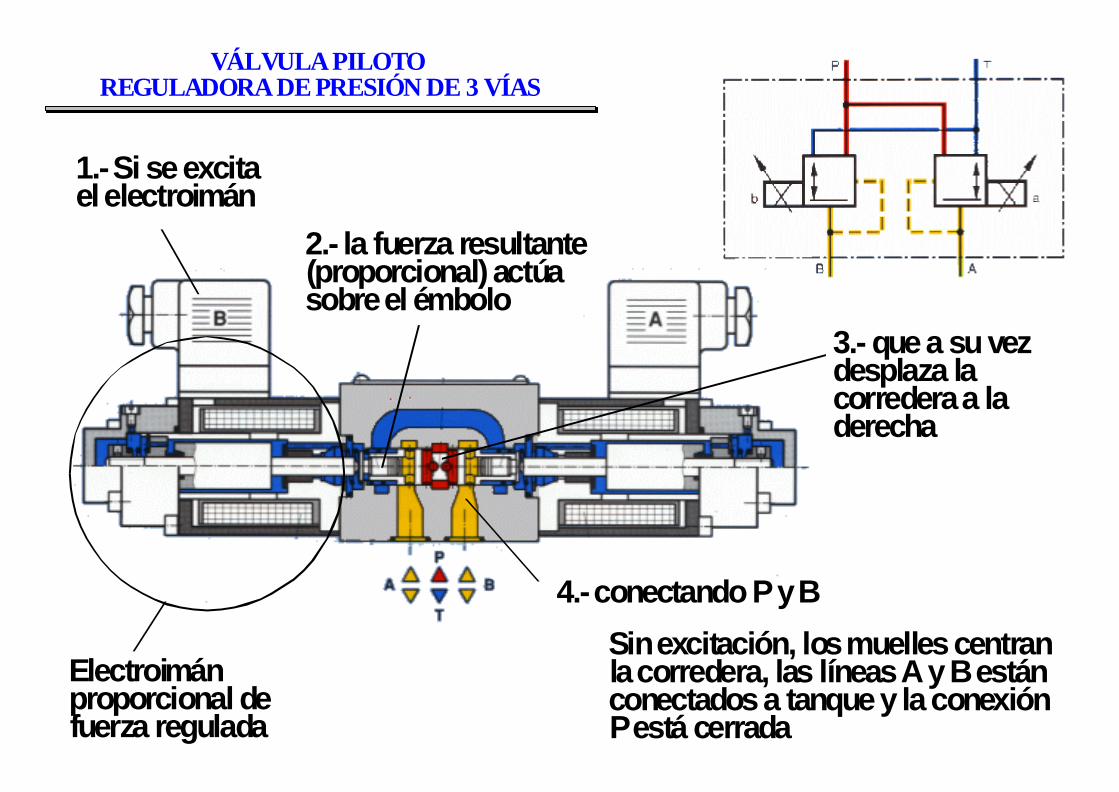
VÁLVULA PILOTO REGULADORA DE PRESIÓN DE 3 VÍAS
Electroimánproporcional defuerza regulada
1.- Si se excitael electroimán
Sin excitación, los muelles centranla corredera, las líneas A y B estánconectados a tanque y la conexiónP está cerrada
2.- la fuerza resultante(proporcional) actúasobre el émbolo
3.- que a su vezdesplaza lacorredera a laderecha
4.- conectando P y B
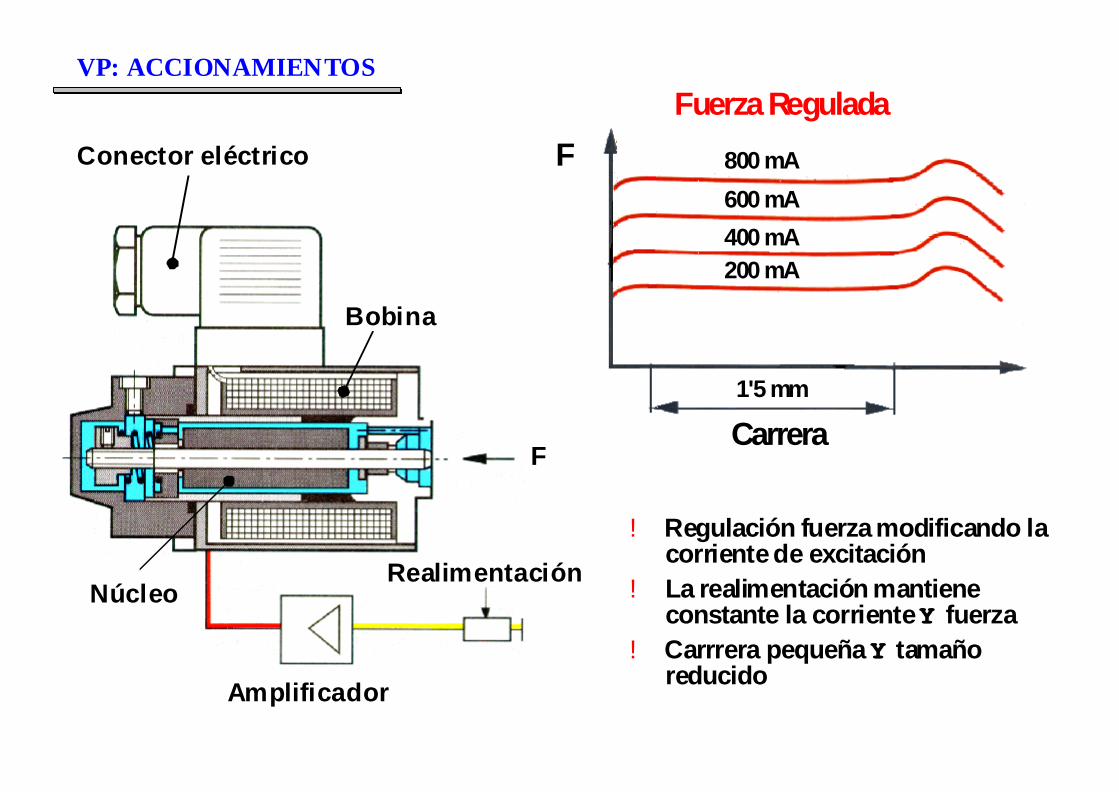
VP: ACCIONAMIENTOS
F
Conector eléctrico
Bobina
Amplificador
RealimentaciónNúcleo
! Regulación fuerza modificando lacorriente de excitación
! La realimentación mantieneconstante la corriente YY fuerza
! Carrrera pequeña YY tamañoreducido
Fuerza Regulada
800 mA
600 mA
400 mA200 mA
1'5 mm
F
Carrera
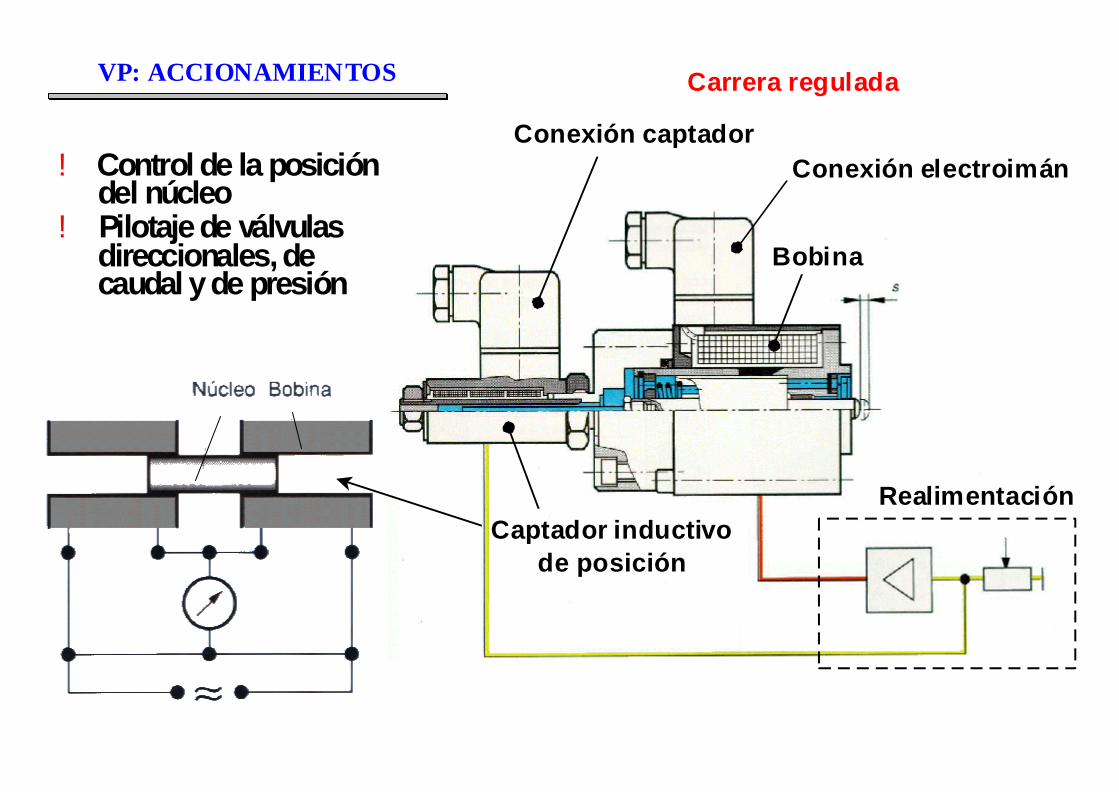
VP: ACCIONAMIENTOS Carrera regulada
! Control de la posicióndel núcleo
! Pilotaje de válvulasdireccionales, decaudal y de presión
Captador inductivode posición
Conexión captadorConexión electroimán
Bobina
Realimentación
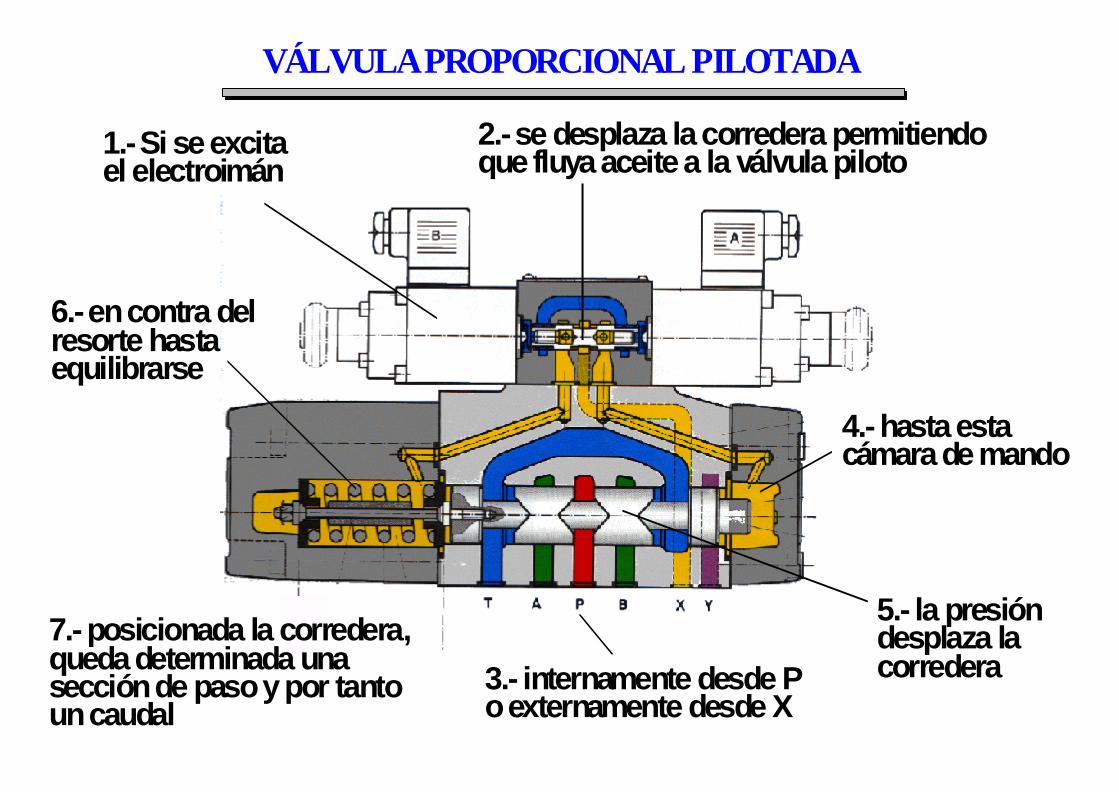
VÁLVULA PROPORCIONAL PILOTADA
1.- Si se excitael electroimán
2.- se desplaza la corredera permitiendoque fluya aceite a la válvula piloto
3.- internamente desde P o externamente desde X
4.- hasta estacámara de mando
5.- la presióndesplaza lacorredera
6.- en contra delresorte hastaequilibrarse
7.- posicionada la corredera,queda determinada unasección de paso y por tantoun caudal
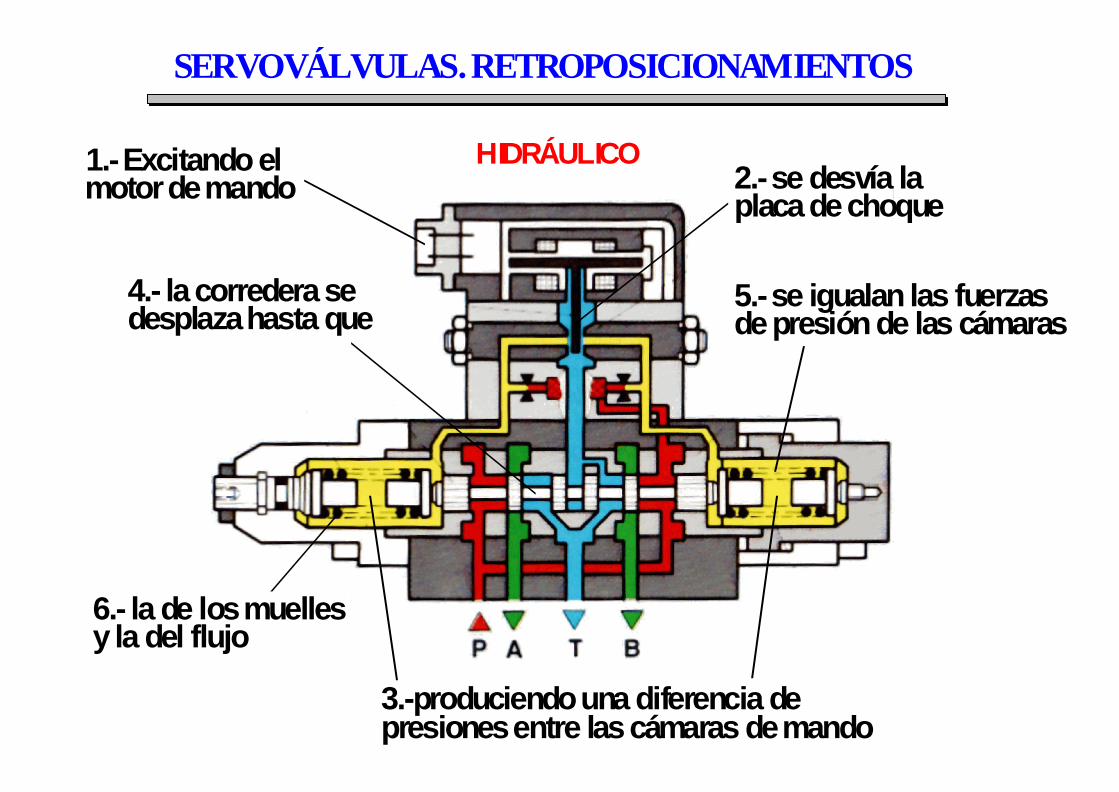
SERVOVÁLVULAS. RETROPOSICIONAMIENTOS
HIDRÁULICO1.- Excitando elmotor de mando 2.- se desvía la
placa de choque
3.-produciendo una diferencia depresiones entre las cámaras de mando
4.- la corredera sedesplaza hasta que
5.- se igualan las fuerzasde presión de las cámaras
6.- la de los muellesy la del flujo
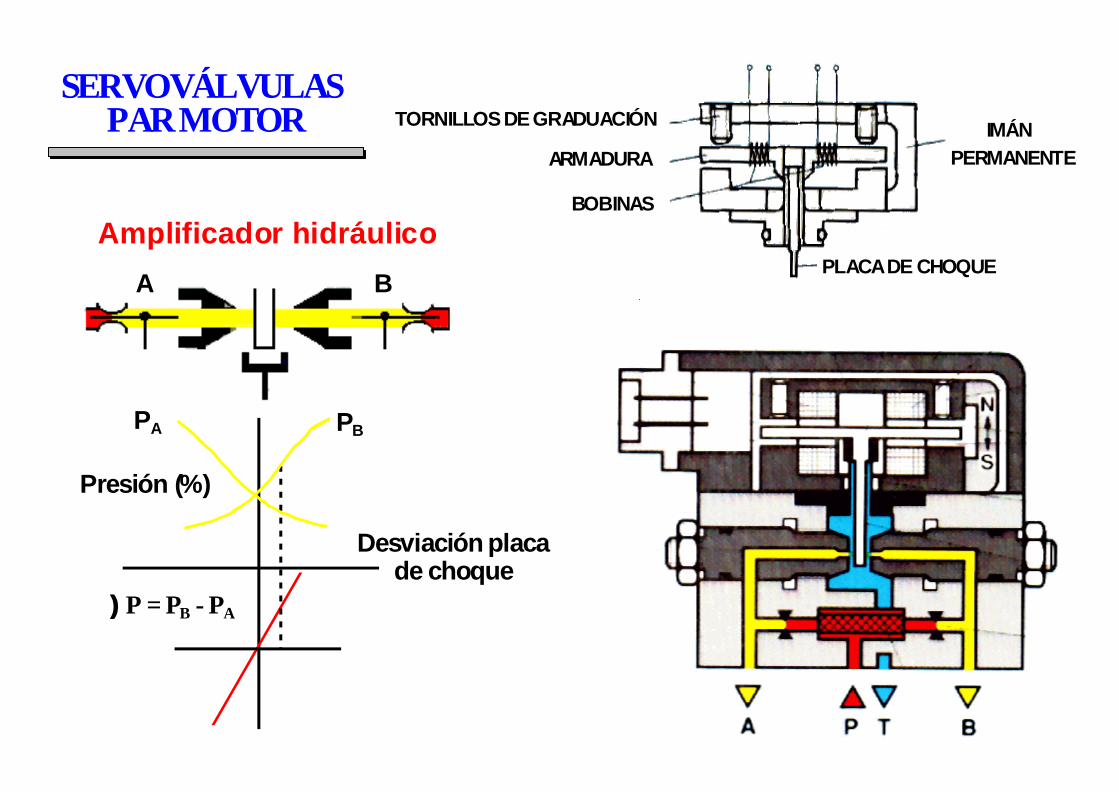
SERVOVÁLVULAS PAR MOTOR
A B
Presión (%)
Desviación placade choque
))P = PB - PA
PBPA
IMÁN
BOBINAS
PLACA DE CHOQUE
TORNILLOS DE GRADUACIÓN
ARMADURA PERMANENTE
Amplificador hidráulico
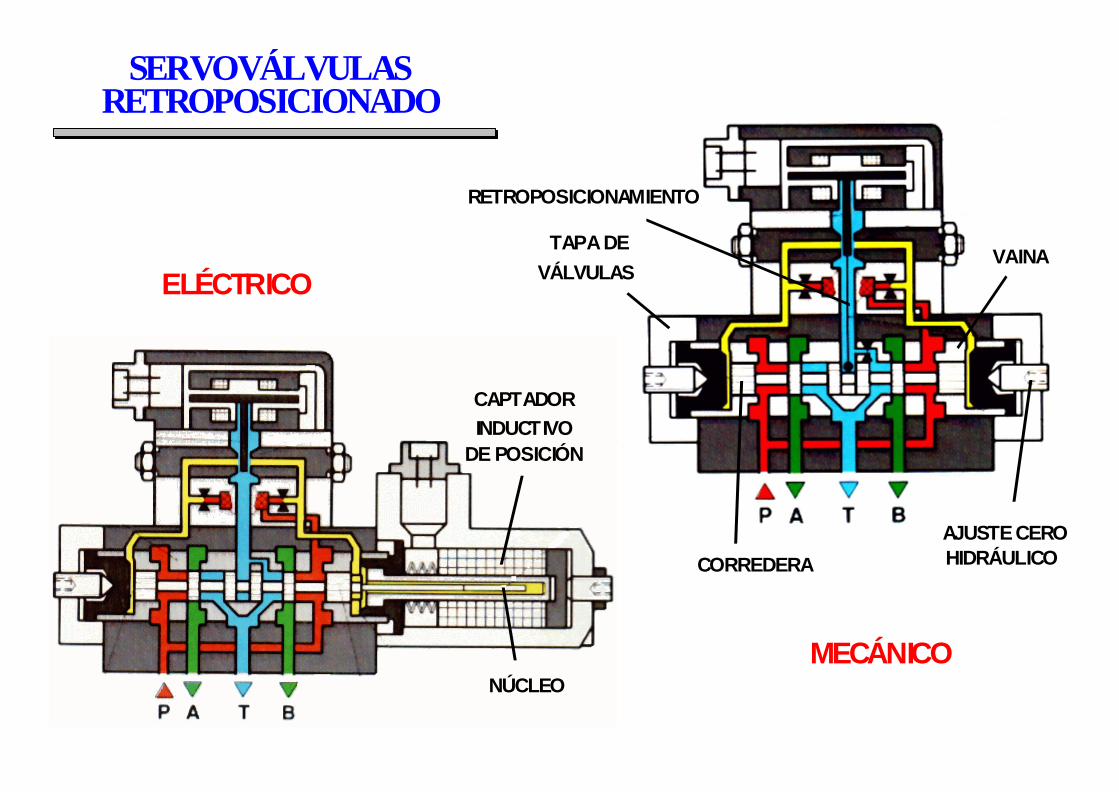
SERVOVÁLVULASRETROPOSICIONADO
CAPTADOR
INDUCTIVODE POSICIÓN
NÚCLEO
ELÉCTRICO
TAPA DE
VÁLVULAS
MECÁNICO
VAINA
CORREDERA
AJUSTE CEROHIDRÁULICO
RETROPOSICIONAMIENTO
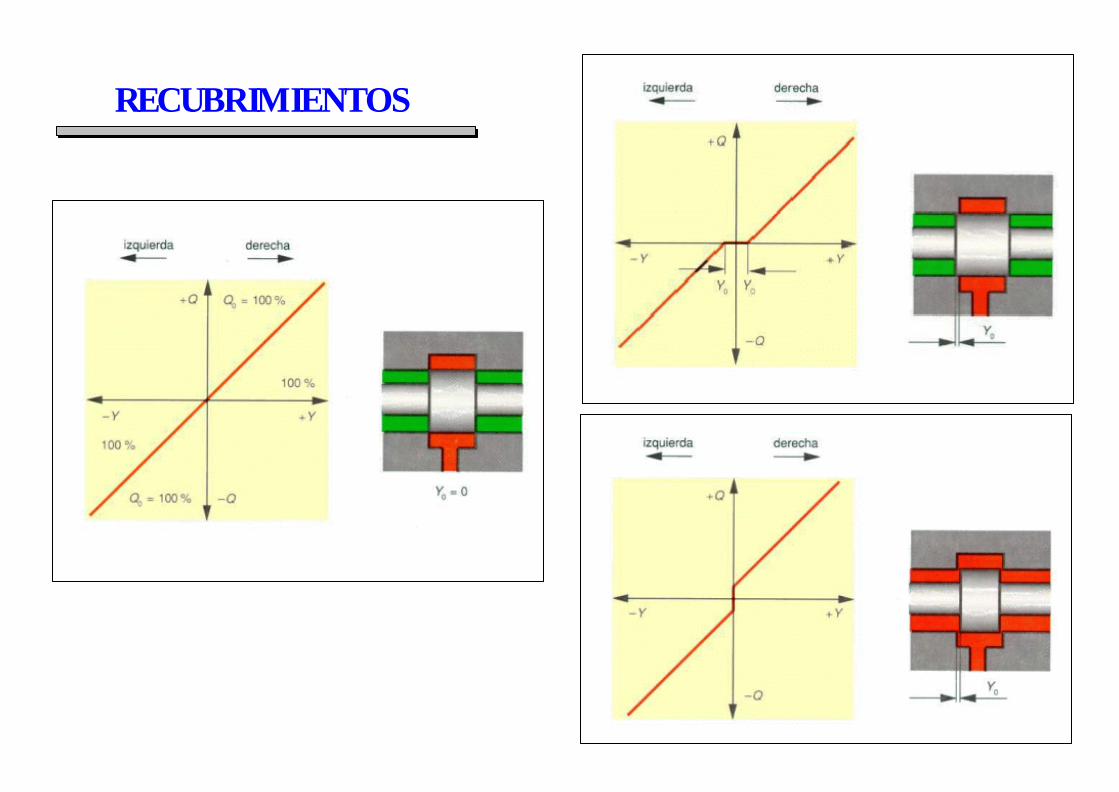
RECUBRIMIENTOS
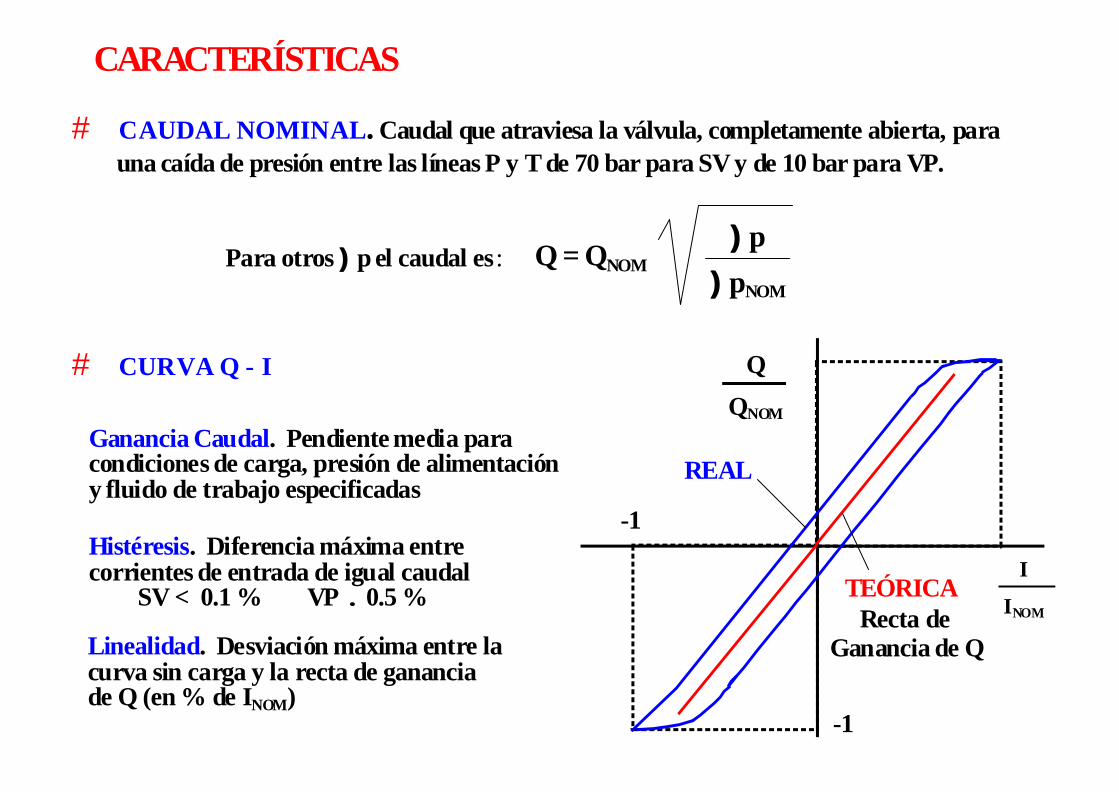
CARACTERÍSTICAS
# CAUDAL NOMINAL. Caudal que atraviesa la válvula, completamente abierta, parauna caída de presión entre las líneas P y T de 70 bar para SV y de 10 bar para VP.
# CURVA Q - I
Q = QNOM))pNOM
))pPara otros ))p el caudal es:
Ganancia Caudal. Pendiente media paracondiciones de carga, presión de alimentacióny fluido de trabajo especificadas
Histéresis. Diferencia máxima entrecorrientes de entrada de igual caudal
SV < 0.1 % VP .. 0.5 %
Linealidad. Desviación máxima entre lacurva sin carga y la recta de gananciade Q (en % de INOM)
INOM
I
QNOM
Q
-1
-1
REAL
TEÓRICARecta de
Ganancia de Q
0 20 40 60 80 100
0
20
40
60
80
100
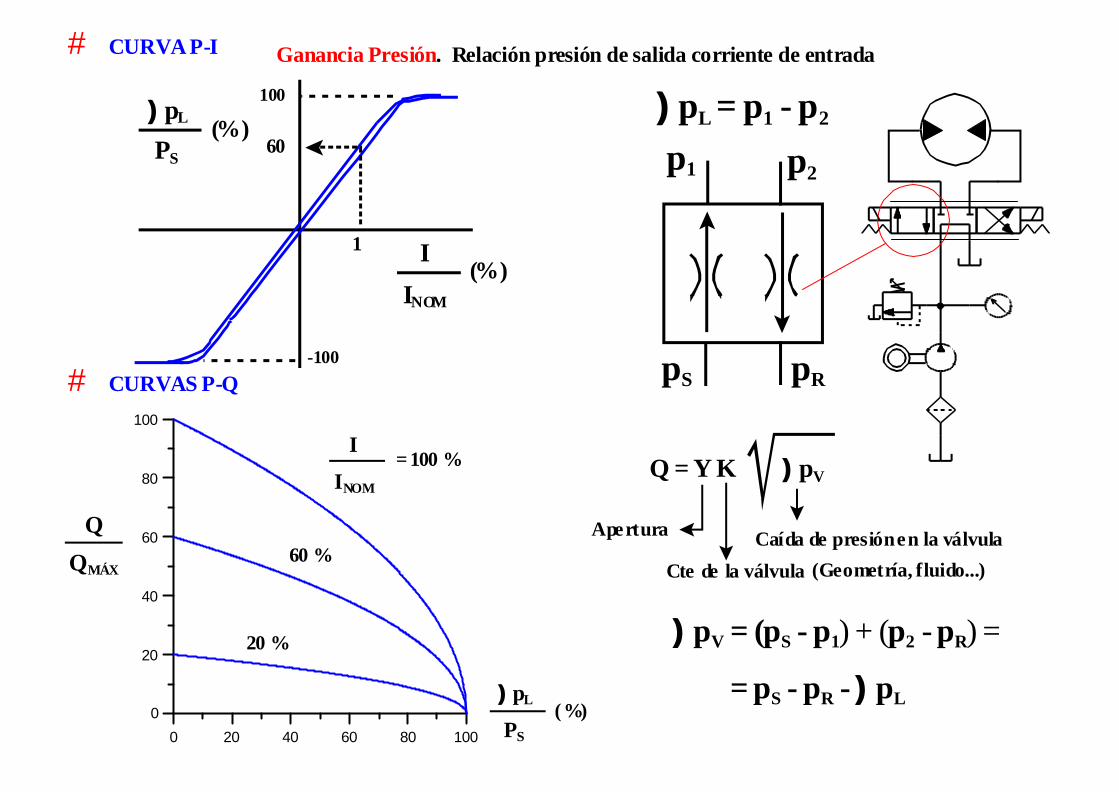
# CURVA P-I
# CURVAS P-Q
Ganancia Presión. Relación presión de salida corriente de entrada
))pL = p1 - p2
p1 p2
pS pR
Q = Y K ))pV
Apertura
Cte de la válvula (Geometría, fluido...)
Caída de presión en la válvula
))pV = (pS - p1) + (p2 - pR) =
= pS - pR - ))pL
INOM
I
PS
))pL(%)
-100
100
(%)
PS
))pL(%)
QMÁX
Q
1
60
= 100 %INOM
I
60 %
20 %
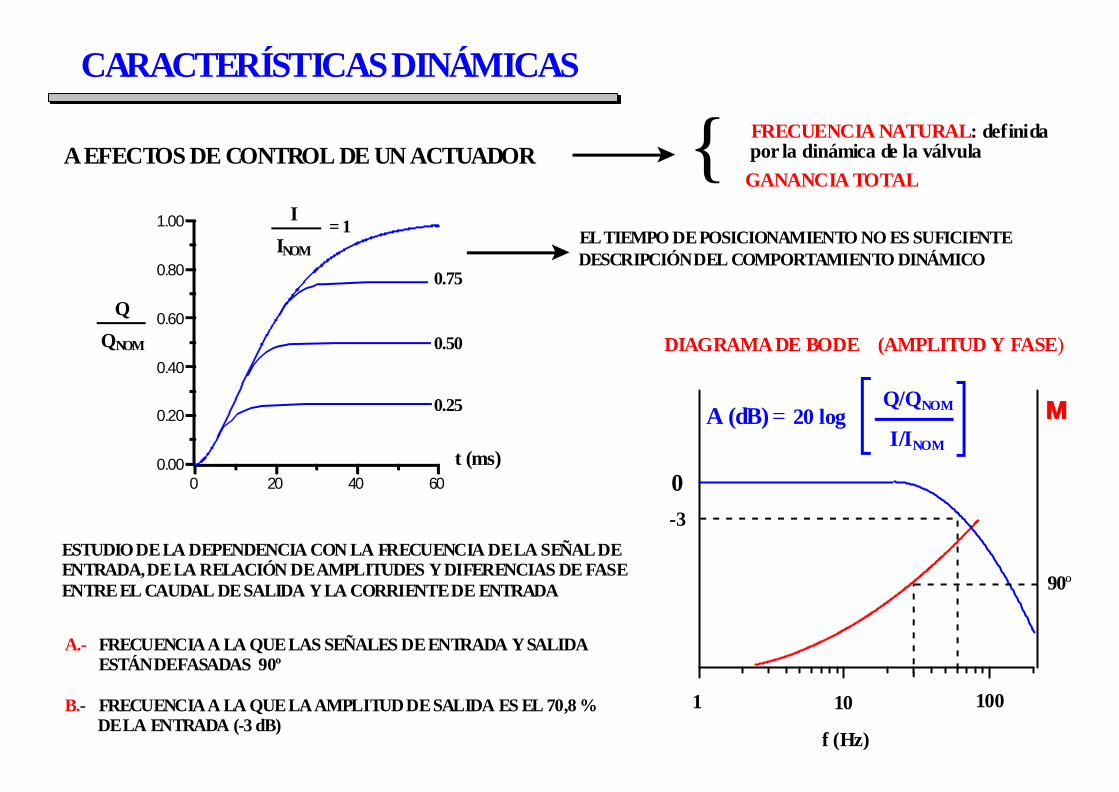
CARACTERÍSTICAS DINÁMICAS
A (dB) =Q/QNOM
I/INOM
20 log MM
f (Hz)
101 100
-3
90º
ESTUDIO DE LA DEPENDENCIA CON LA FRECUENCIA DE LA SEÑAL DEENTRADA, DE LA RELACIÓN DE AMPLITUDES Y DIFERENCIAS DE FASEENTRE EL CAUDAL DE SALIDA Y LA CORRIENTE DE ENTRADA
FRECUENCIA NATURAL: definidapor la dinámica de la válvula
GANANCIA TOTAL
EL TIEMPO DE POSICIONAMIENTO NO ES SUFICIENTEDESCRIPCIÓN DEL COMPORTAMIENTO DINÁMICO
{
DIAGRAMA DE BODE (AMPLITUD Y FASE)
A.- FRECUENCIA A LA QUE LAS SEÑALES DE ENTRADA Y SALIDAESTÁN DEFASADAS 90º
B.- FRECUENCIA A LA QUE LA AMPLITUD DE SALIDA ES EL 70,8 %DE LA ENTRADA (-3 dB)
0 20 40 600.00
0.20
0.40
0.60
0.80
1.00 = 1INOM
I
0.75
0.50
0.25
QNOM
Q
t (ms)0
A EFECTOS DE CONTROL DE UN ACTUADOR
0.00 0.01 0.02 0.03 0.04
-1.00
-0.50
0.00
0.50
1.00
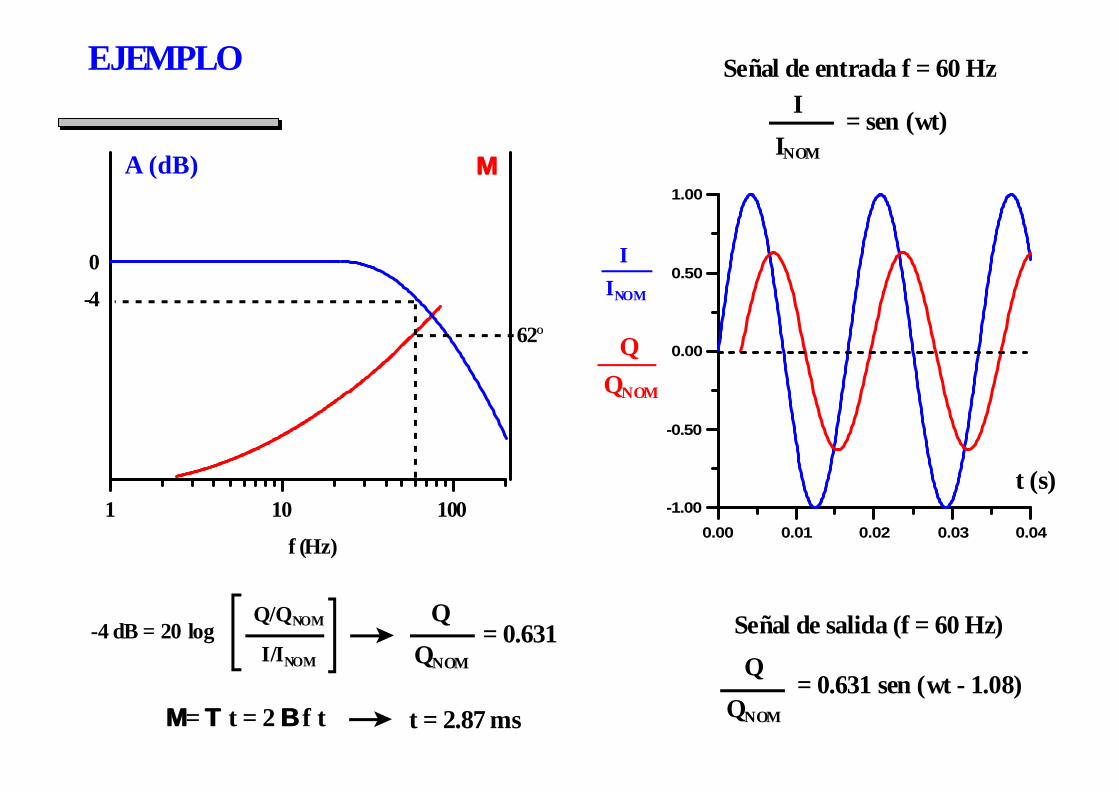
EJEMPLO Señal de entrada f = 60 Hz
= sen (wt)INOM
I
INOM
I
QNOM
Q
t (s)
Señal de salida (f = 60 Hz)
= 0.631 sen (wt - 1.08)QNOM
Q
A (dB) MM
f (Hz)
101 100
-4
0
62º
QNOM
Q= 0.631
MM= TT t = 2 BB f t t = 2.87 ms
Q/QNOM
I/INOM
-4 dB = 20 log