Embed Size (px)
Citation preview

Mobile and Vehicular Network Lab
Vehicular Networks車輛網路
Prof. Michael Tsai 蔡欣穆2016/5/27

Mobile and Vehicular Network Lab
Future cars
• GM EN-V video
2

Mobile and Vehicular Network Lab
Vehicle Talks.
• Safety related– Warn you about an accident
ahead (emergency brake)– Tell you a component in your car is
about to fail
• Energy related– Provide routing to avoid a traffic
jam– Smart traffic light
(or, “no traffic light”)
• Information and entertainment (“Infotainment”)– Advertisement– Electronic toll collection– Social networking for passengers– Internet connection
3

Mobile and Vehicular Network Lab
How do they talk?
• “Blackbox” (On-Board Unit, OBU) with wireless radios
• Direct Vehicle-to-Vehicle (V2V) Communications– IEEE 802.11p: designed for wireless access in
vehicular environments (WAVE)
– IEEE 1609: Higher layer protocols and operations
– Dedicated Short Range Communications (DSRC): U.S. standard for vehicular communications
• Via Pre-deployed Infrastructure (V2I)– Cellular Networks, e.g.,
Long Term Evolution (LTE)
– Road-side Unit (RSU) with V2V radio
4

Mobile and Vehicular Network Lab
Vehicular Networks
5

Mobile and Vehicular Network Lab
DSRC/WAVE/802.11p
• PHY layer almost identical to IEEE 802.11a • OFDM using BPSK/QPSK/16 QAM/64 QAM • Reduced inter symbol interference (multipath effects and
Doppler shift)– Doubled timing parameters (double the time durations)– Channel bandwidth (10 MHz instead of 20 MHz)
• Reduced throughput (3 ... 27 Mbit/s instead of 6 ... 54 Mbit/s) • Communication range of up to 1000 m • Vehicles’ velocity up to 200 km/h
– MAC layer with extensions to IEEE 802.11a – Randomized MAC address – QoS (Priorities, see IEEE 802.11e, ...)
• Support for multi-channel and multi-radio • New ad hoc mode
6

Mobile and Vehicular Network Lab
DSRC/WAVE/802.11p
7
(a) WAVE protocol stack
(b) DSRC channel allocation

Mobile and Vehicular Network Lab
Change the world (on the road)
• What we will talk about today:
0. Google driver-less car (autonomous vehicle)
1. Increase highway capacity (efficient)
2. Avoid scooter accidents (safe)
3. Business perspective (whether it will happen)
8

Mobile and Vehicular Network Lab
Blinds can drive
• Google car video
9

Mobile and Vehicular Network Lab
What is in Google Car
Cost: • Estimated total:
NT$ 9 M• 3D LIDAR (laser
scanner): over NT$2 M
• Video cameras: a few hundred NT$
• Radar sensors: a few thousands NT$
• Processor & others
10

Mobile and Vehicular Network Lab
Some Statistics
• As of 2015:
– 1,000,000 autonomous-driving miles (1,600,000 km) accident-free.
– 75 years of typical U.S. adult driving
– 14 minor collisions for 23 cars as of
• February 14, 2016, a Google car struck a bus.
• 4 U.S. States, Nevada, Florida, Michigan and California, plus Washington D.C., have passed laws that permit driverless cars on the road.
• Available to the public in 2020.
11

Mobile and Vehicular Network Lab
But Google Driverless Cars do not talk (to other cars).
12

Mobile and Vehicular Network Lab
Change the world (on the road)
• What we will talk about today:
0. Google driver-less car (autonomous vehicle)
1. Increase highway capacity (efficient)
2. Avoid scooter accidents (safe)
3. Business perspective (whether it will happen)
13

Mobile and Vehicular Network Lab
http://virginiaits.blogspot.com/
http://2howto.com/how-to-cope-with-ever-rising-traffic-congestion-in-india/
http://www.csee.umbc.edu/courses/undergraduate/FYS102D/streetsmart.pdf
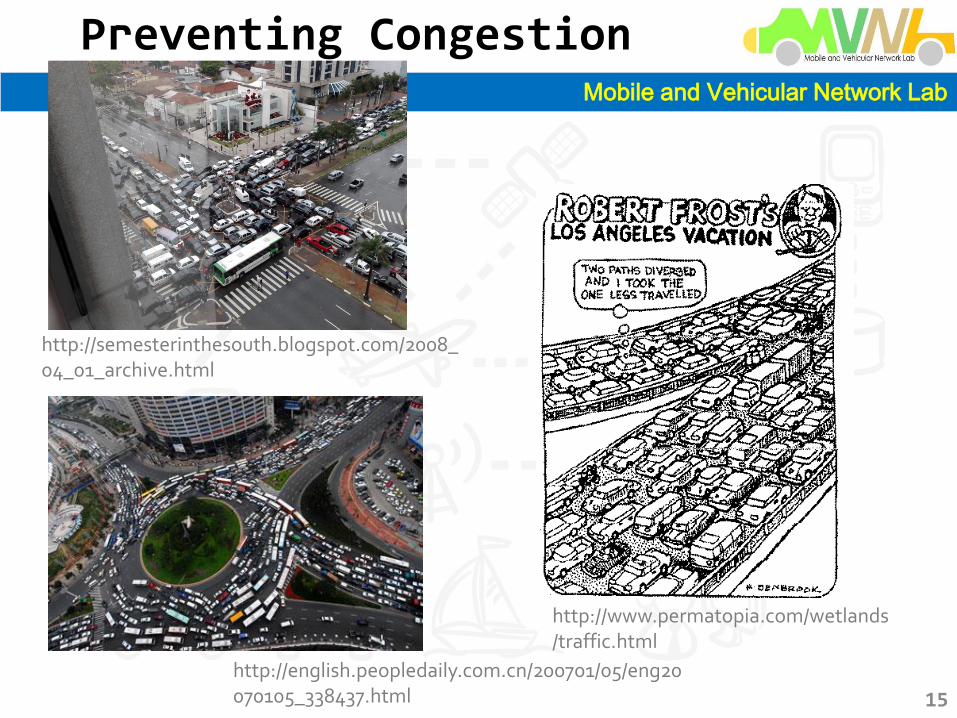
Preventing Congestion
14
Mobile and Vehicular Network Lab
http://www.permatopia.com/wetlands/traffic.html
http://semesterinthesouth.blogspot.com/2008_04_01_archive.html
http://english.peopledaily.com.cn/200701/05/eng20070105_338437.html
Preventing Congestion
15

Mobile and Vehicular Network Lab
雪隧挑戰賽
• The Hsuehshan Tunnel is the main artery between Taipei & Yilan, but it can be severely clogged. Build new apps to help drivers avoid congestion and improve traffic flow in the tunnel.
• http://hsuehshantunnel.devpost.com
• Winner: E-Pass 宜pass
• Video: https://youtu.be/mukfjyyim3U
16

Mobile and Vehicular Network Lab
Building Roads: No Moore’s Law Here
Wugu-Yangmei Overpass (completed in 2013)
(for Freeway No. 1 in Taiwan)
– Cost: 3B USD for 40 km of elevated road
- The most expensive (per unit length) in the history
– Divert approximately 25% of traffic from the original
highway
– Improve rush hour average speed:
- 40-50 kmph 80-90 kmph
http://twimg.edgesuite.net//images/twapple/640pix/20121217/LN06/LN06_004.jpg
17Hsin-Mu Tsai (c) 2010-2015 All rights reserved.

Mobile and Vehicular Network Lab
Increase Road Efficiency
• Maximum highway capacity per lane = 2,200 vehicle/hr
• At 100 kmph, the road surface utilization = 5%
• Automatic steering reduce lane width
• Longitudinal control (adaptive cruise control) reduce the gap
• Drivers’ response delays cause stop and go disturbances
• Only possible through cooperation with communications
45.5 m
5 m
3.5
m
1.8
m

Mobile and Vehicular Network Lab
Reduce Energy Consumption
• At highway speeds, HALF of energy is used to overcome aerodynamic drag– Close-formation automated platoons can save 10% to
20% of total energy use
• Acceleration/deceleration cycles waste energy (and produce excess emissions)– Automation can eliminate stop-and-go disturbances
• Again, only possible through cooperation
Mobile and Vehicular Network Lab
Platooning
• Small gap between cars in a platoon
– Gentle impacts between vehicles in faulty cases
• Large gap between platoons
– Prevent severe impacts in faulty cases
• Platoons enable lane capacity to be doubled or tripled, while maintaining safety
– 6000 – 8000 cars/hour in 10-car platoons
– 1500 heavy trucks/hour in 3-truck platoons
20

Mobile and Vehicular Network Lab
Platooning
21
Volvo SARTRE project demonstration

Mobile and Vehicular Network Lab
D[ !
; (=%$)X ' 0' !PGG0&$1<!Green Light Optimal Speed Advisory
GLOSA
http://www.sigmobile.org/mobisys/2011/slides/signalguru.pdf
Real-time optimal speed advisoryon smartphone screen
15km

Mobile and Vehicular Network Lab
Traffic Light Talks to Your Car / Phone
“To Pass or Not to Pass”東元Green Tech 2015競賽佳作
沈雯萱, 傅蕎, 鄭嘉文, 王維楨, 陳艾苓, 蔡欣穆

Mobile and Vehicular Network Lab
Back to “what’s wrong with Google Car”
• Cooperation Can Augment Sensing– Autonomous vehicles are “deaf-mute”
– Cooperative vehicles can “talk” and “listen” as well as “seeing”
• Communicate performance and condition data directly rather than sensing it indirectly– Reduce uncertainties
– Reduce filtering lags
– More sources of information available, including beyond line of sight
• Expand performance envelope – capacity and ride quality
24

Mobile and Vehicular Network Lab
Change the world (on the road)
• What we will talk about today:
0. Google driver-less car (autonomous vehicle)
1. Increase highway capacity (efficient)
2. Avoid scooter accidents (safe)
3. Business perspective (whether it will happen)
25

Mobile and Vehicular Network Lab
What is available in today’s car?
26

Mobile and Vehicular Network Lab
1. Crash – post crash2. Crash is unavoidable3. Crash may occur4. Risk has appeared
5. Risk has not yet appeared
Risk
12
34
5
Larger
Shield is
SAFER!
For :• Blind Spot Information System
(BLIS)• Adaptive Cruise Control (ACC)• Forward collision warning• Pedestrian detection• Lane departure warning
We are here.
What can we do here?
The “Safety Shield”
5
4
3
2
1
4
27

Mobile and Vehicular Network Lab
Overcome Visual Obstacles
Conventional Approach:Video camera and/or radar only
Cooperative approach:Sensors + Communications
Scooter A
12
3
4
1
24
3
Detects only risks with a LOS path Detects also risks via comm. / nLOS path
3
4
Line-Of-Sight blocked by a bus
Line-Of-Sight blocked by the road corner
2
1
I’m merging into the middle lane!
I’m turning right!
Be careful to the car on my left!
28

Mobile and Vehicular Network Lab
Reduce Uncertainty
• Measurements of location/velocity always have a level of uncertainty
• Self-information is the most accurate.
• Observation from nearby vehicles is more accurate than that from distant vehicles.
13
2
1
2
3
Location Uncertainty:Possible Location
(e.g., vision-based localization)29

Mobile and Vehicular Network Lab
Reduce Uncertainty: How?
30
Localization Using Images Taken from Multiple Cameras
Mobile and Vehicular Network Lab
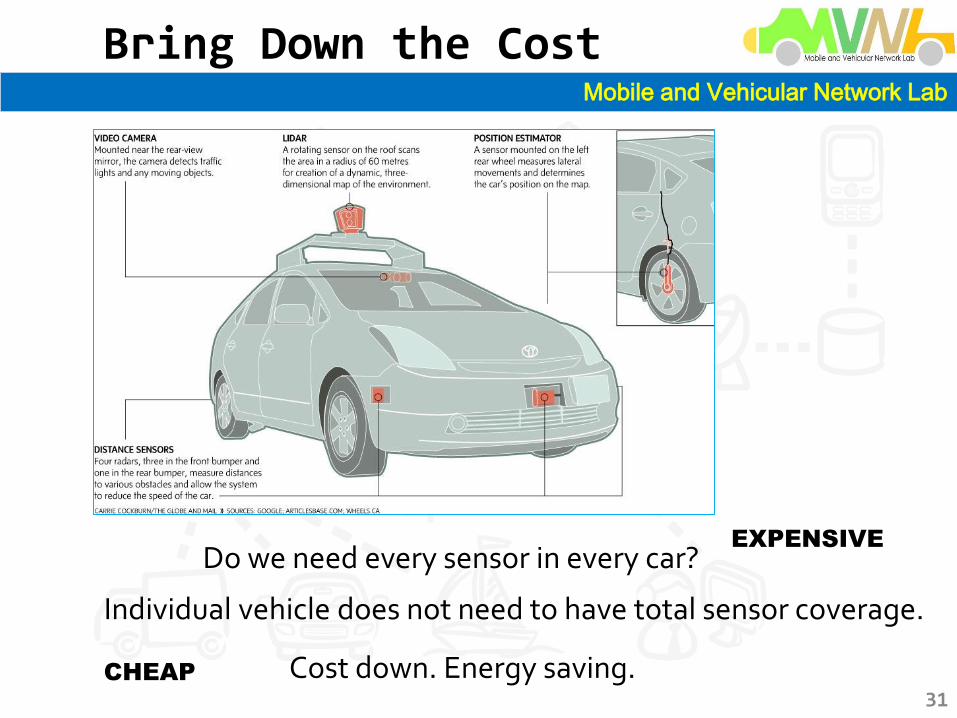
Bring Down the Cost
Individual vehicle does not need to have total sensor coverage.
EXPENSIVE
Do we need every sensor in every car?
Cost down. Energy saving. CHEAP
31
Mobile and Vehicular Network Lab
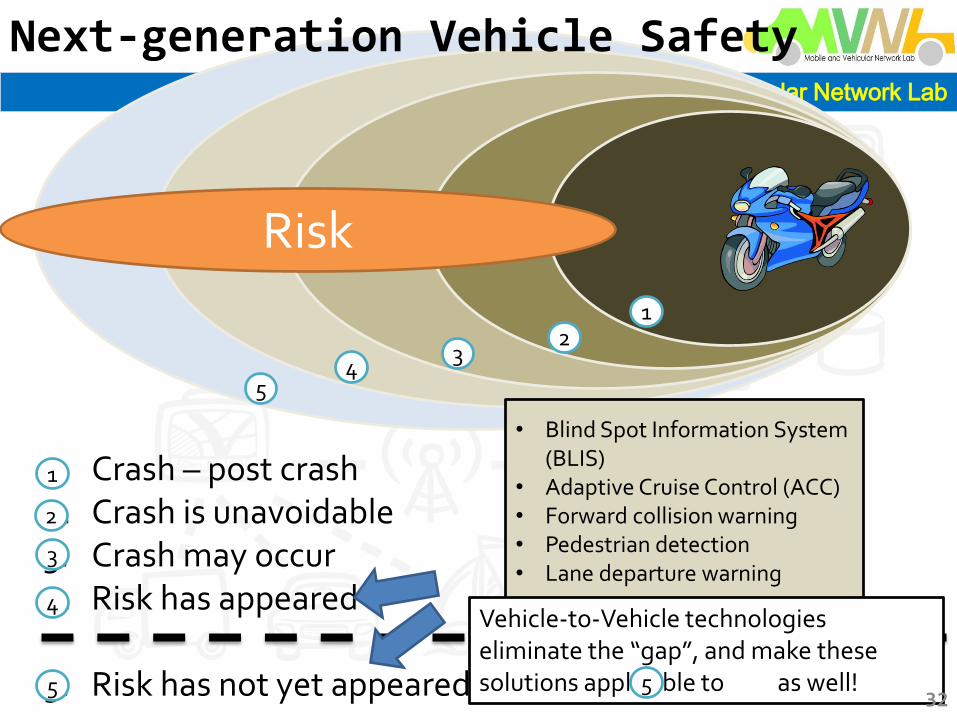
1. Crash – post crash2. Crash is unavoidable3. Crash may occur4. Risk has appeared
5. Risk has not yet appeared
Risk
12
34
5
• Blind Spot Information System (BLIS)
• Adaptive Cruise Control (ACC)• Forward collision warning• Pedestrian detection• Lane departure warning
Next-generation Vehicle Safety
Vehicle-to-Vehicle technologies eliminate the “gap”, and make these solutions applicable to as well!5
4
3
2
1
532

Mobile and Vehicular Network Lab
Scooters in Taiwan
33*http://www.epochtw.com http://upload.wikimedia.org
• In Taiwan, 68.35% of registered vehicles are scooters or motorcycles.
• Every 1.56 persons own a scooter.

Mobile and Vehicular Network Lab
Scooters Around the World
34
CountryNumber of Motorcycle/Scooter Number of Population per Scooter
Taiwan 14,844,932 1.56
Malaysia 9,443,922 2.95
Vietnam 25,414,689 3.38
Thailand 17,229,814 3.88
Indonesia 52,433,132 4.47
Italy 9,425,098 6.39
Spain 4,958,879 9.26
Switzerland 806,577 9.60
Japan 12,477,417 10.22
Czech 903,346 11.61
Austria 712,092 11.75
China 100,004,714 13.35
Netherlands 1,228,058 13.46
Brazil 13,088,074 14.63
USA 7,929,724 38.72 United Kingdom 1,433,124 43.13

Mobile and Vehicular Network Lab
Scooter Accidents in Taiwan
35
• Scooter passengers account for most deaths/injuries
• The percentages and the actual numbers are both rising!
Hsin-Mu Tsai (c) 2010-2015 All rights reserved.

Mobile and Vehicular Network Lab
Safety Features inOff-the-Shelf Vehicle Product
Car Scooter
Active Safety Feature 1. Anti-lock Breaking System(ABS)
2. Electronic Brake-Force Distribution (EBD)
3. Electronic Stability Control (ESC) / Traction Control System (TCS)
1. Anti-lock Breaking System (ABS)
2. Traction Control System (TCS)
3. Power mode map
Passive Safety Feature 1. Seat belts2. Body frame3. Head restraints4. Front air bags (driver
passenger)5. Side curtain air bags
1. Full-face helmet2. Leather suit (jacket,
gloves, pants)3. Boots
Not common!
Open-face helmet only
Not much development! 36

Mobile and Vehicular Network Lab
Advantages of Using a Smartphone
Useful Components
Multi-touch Screen
Powerful CPU
Useful Sensors:
GPS
Accelerometer
High initial market penetration rate
Gyro
• Lower effect cost for users
• 2012 smartphone market share:
• Existing Supporting Infrastructure
42% 44%
Good user experience
• Know about the user behaviors in other context as well
• Already familiar with the smartphone’s HCI
37
CameraWiFi Cellular
and DSRC (Qualcomm)

Mobile and Vehicular Network Lab
Classification of Causes of Fatal Accidents
• Of the 3,209 deaths in accidents in 2010, top 4 causes of accidents are:
• Drive Under Influence (drunk driver) – 17.82% (572)
• Did not yield to others – 16.45% (528)
• Lost of attention to the road – 15.39% (494)
• Violation of traffic signals – 7.35% (236)
38
What can be done to avoid these accidents? (and save over 1,000 lives per year!)

Submission
doc.: IEEE 802.11-13/0541r1
Safety Applications – V2V
Forward Collision Avoidance FCA
Emergency Electronic Brake Lights EEBL
Blind Spot Warning BSW
Lane Change Assist LCA
Do Not Pass Warning DNPW
Intersection Collision Warning ICA
Wrong Way Driver Warning WWDW
Cooperative Adaptive Cruise Control CACC
Examples Follow:
Slide 39 John Kenney, Toyota Info Technology Center
May 2013

Submission
doc.: IEEE 802.11-13/0541r1
V2V Safety Use Case
If driver of approaching car does not stop, or slow
appropriately, warning issued within car.
Slide 40 John Kenney, Toyota Info Technology Center
May 2013
DSRC communication
Stopped
CarApproaching
Car
Forward Collision Warning (FCW)

Submission
doc.: IEEE 802.11-13/0541r1
V2V Safety Use Case
High deceleration by car approaching jam. Trailing
car Informed via DSRC within 100 msec.
Slide 41 John Kenney, Toyota Info Technology Center
May 2013
Emergency Electronic Brake Lights (EEBL)
Traffic
Jam

Submission
doc.: IEEE 802.11-13/0541r1
V2V Safety Use Case
Slide 42 John Kenney, Toyota Info Technology Center
May 2013
Normal driving –
advisory indicator
of car in blind spot
Driver receives warning
when showing intent
to change lanes
Blind Spot Warning (BSW)
Note: Specific timing, format, or decision logic for advisories
and warnings will likely vary for each car manufacturer

Submission
doc.: IEEE 802.11-13/0541r1
V2V Safety Use Case
When showing intent to move to oncoming lane,
driver receives warning if not safe to pass.
Slide 43 John Kenney, Toyota Info Technology Center
May 2013
Do Not Pass Warning (DNPW)
Oncoming
traffic

Submission
doc.: IEEE 802.11-13/0541r1
V2V Safety Use Case
If intersecting trajectories are indicated,
driver is warned.
Slide 44 John Kenney, Toyota Info Technology Center
May 2013
Building: Leads to
Non-Line Of
Sight (NLOS)
communication
Intersection Collision Warning (ICA)

Submission
doc.: IEEE 802.11-13/0541r1
Safety Applications – V2I Applications enabled by SPaT:
Red Light Running RLR
Left Turn Assist LTA
Right Turn Assist RTA
Pedestrian Signal Assist PED-SIG
Applications enabled by Signal Request Message
(bi-directional communication):
Emergency Vehicle Preempt PREEMPT
Transit Signal Priority TSP
Freight Signal Priority FSP
Rail Crossing RCA
Examples follow:
Slide 45 John Kenney, Toyota Info Technology Center
May 2013

Submission
doc.: IEEE 802.11-13/0541r1
Safety Use Case: Work Zone Warning
Slide 47
Grass Divider
up to 1100 ft range
Work Zone Warning Com. Zone
Work Zone
Traffic Cones
RSU
In-Vehicle Display
and AnnunciationZONE
AHEAD
WORK
May 2013
John Kenney, Toyota Info Technology Center

Submission
doc.: IEEE 802.11-13/0541r1
V2I Safety Use Case: Road Hazard Warning
Slide 48 John Kenney, Toyota Info Technology Center
May 2013
Median
Dynamic Message Sign
and Multi-App RSU
Road Condition Warning Com. Zone
Road Sensor Station
Bridge
ICE
Up to 650 ft
forward of the
Hazard
90 m (300 ft)
range
Variations include:
Road Condition (ice), Curve Speed
Low Bridge Roll-over
Roadway Weather (RWIS) In Vehicle Signage
Accident Ahead Rock slide, etc.

Submission
doc.: IEEE 802.11-13/0541r1
V2I Safety Use Case: (PREEMPT)(also used for Transit/Freight Priority)
Slide 49
Emergency
Vehicle
RSE
up to 1000 m
(3281 ft)
Preempt Transaction1. DSRC OBE-to-RSE: Vehicle Host Preemption Request
2. DSRC RSE-to-OBE: ACK
3. Emergency Vehicle Host Displays Preempt-ACK within vehicle
DSRC Transaction occurs on Ch. 184 at high power.
OBE
May 2013
John Kenney, Toyota Info Technology Center

Submission
doc.: IEEE 802.11-13/0541r1
V2I Safety Use Case: Standardized Tolls
Slide 50
Open Road Example
Capture Zone
RSE-Equipped
Gantry
30 m
(98 ft)
May 2013
John Kenney, Toyota Info Technology Center

Submission
doc.: IEEE 802.11-13/0541r1
V2I Safety Use Case: RR Grade Crossing
May 2013
John Kenney, Toyota Info Technology Center Slide 51
Train 20-40 sec.
distant
Conventional
RR Grade Crossing
Equipped with RSE
RSE warning range
increased compared to
conventional equipment
Can also be used at non-
signalized crossingsRange up
to 1100 ft
RR Warning Sign
Train 20-40 sec.
distant

Mobile and Vehicular Network Lab
Red-light Running:Infrastructure-based Solution
52
A LIDAR or a camera to detectRed-Light Runners
Broadcast to warn near-by vehicles

Mobile and Vehicular Network Lab
Red-light Running:Smartphone-based Solution
53
Rider’s smartphone detects possible red-light running
Broadcast to warn near-by vehicles

Mobile and Vehicular Network Lab
RedEye: System Design
54
Data collection for D-SVM model training
WiFi range extender

Mobile and Vehicular Network Lab
RedEye: Prediction Results
55
Prediction at 25 m from the intersection
Percentage of avoided accidents

Mobile and Vehicular Network Lab
Challenge 1: Density and Speed
• Range reaction time
• 200 km/h relative speed
100 m = 1.8 s @ 200 km/h
• A 100-m road segment
can have:
– More than 600 scooters
– More than 120 cars
• Heavy interference
• The need for
reliable communications59Hsin-Mu Tsai (c) 2010-2015 All rights reserved.

Mobile and Vehicular Network Lab
Challenge 1: Density and Speed
Unreliable transmission in high-density traffic!
60Hsin-Mu Tsai (c) 2010-2015 All rights reserved.
D. Jiang, V. Taliwal, A. Meier, W. Holfelder, and R. Herrtwich, “Design of 5.9 GHz DSRC-based vehicular safety communication,” IEEE Wireless Communications, vol. 13, no. 5, pp. 36–43, October 2006.

Mobile and Vehicular Network Lab
Challenge 1: Density and Speed
Very unstable wireless channel!
Large possible range ofreceived power
61Hsin-Mu Tsai (c) 2010-2015 All rights reserved.
D. Jiang, V. Taliwal, A. Meier, W. Holfelder, and R. Herrtwich, “Design of 5.9 GHz DSRC-based vehicular safety communication,” IEEE Wireless Communications, vol. 13, no. 5, pp. 36–43, October 2006.

Mobile and Vehicular Network Lab
Challenge 2:
My location is (X3, Y3) and my speed is 98 mph, and I am braking.
My location is (X2, Y2) and my speed is 101 mph.
My location is (X1, Y1) and my speed is 106 mph.
GPS Uncertainty = 5 -10 m
Who is Speaking?
Is the car in front
of me braking?
Hsin-Mu Tsai (c) 2010-2015 All rights reserved. 62

Mobile and Vehicular Network Lab
Challenge 3: Cost and Benefit
• DSRC (IEEE 802.11p) – the current dominant
standard for vehicular communications
• NOT in vehicle products today
• Low adoption incentive:
where is the (day 1) benefit?
– Minimum market penetration rate: 10%
(All new cars have it have to wait for 2 years)
• Low adoption incentive: high initial cost
– Complexity similar to a WiFi radio
– But with much lower quantity,
when bootstrapping the market 63Hsin-Mu Tsai (c) 2010-2015 All rights reserved.

Mobile and Vehicular Network Lab
Change the world (on the road)
• What we will talk about today:
0. Google driver-less car (autonomous vehicle)
1. Increase highway capacity (efficient)
2. Avoid scooter accidents (safe)
3. Business perspective (whether it will happen)
64

Mobile and Vehicular Network Lab
Why do we need a business model?
• You have this cool V2V radio that talks to other vehicle in your car
• But you are ALONE.
• What would happen?
• Nothing…
65

Mobile and Vehicular Network Lab
Why do we need a business model?
• 300K-500K new cars annually in Taiwan
• 6M car population
• 10% minimum market penetration rate is required for most V2V applications
• Even if all new cars start to equip V2V, it takes 2 years to reach 10%.
66
No customer wants to buy something that has to wait for another 2 years to function normally.
No real products.

Mobile and Vehicular Network Lab
Potential Issues: Cooperative Systems
1. Bootstrapping: what is the required initial market penetration?
– If no one is using it, then it is useless
No incentive for the user to purchase the new system
– Possible solution:
• The system is bundled as a "side-feature". You get the main feature you want (e.g., DriverCam), but also get this "nice-to-have" feature additionally.
67

Mobile and Vehicular Network Lab
2. Control point:
– How to make sure only paid users can use thesystem/service?
V2V: no obvious methods (need close systems)
V2I: the gateway (base stations & RSUs) can control who can go through
3. Security: will you trust your neighboring vehicles?
68
Potential Issues: Cooperative Systems

Mobile and Vehicular Network Lab
Possible Business Model
How to obtain the profit?
1. Bundled as part of the vehicle
– New feature, thus higher price
– Does the user want to pay for the additional cost?
2. Smartphone: deployed as a paid app.
– Obtain profit when the user purchases the app
3. Monthly subscription for the user:
– the user is buying a service
4. Subsidized by the government to mandate a new vehicular system (usually combined with 1.)
69

Mobile and Vehicular Network Lab
Case Study 1: Car Following

Mobile and Vehicular Network Lab
Case Study 1: Car Following
• Car Following (The SARTRE Project )– Leader (human) drives for revenue.– Followers (auto-driving) pay for enjoy the trip without human driving.
71
Leader | Dest.: TainanFollower | Dest.: Taichung
Leader | Dest.: Tainan
TaichungEXIT Leave Group & Pay to Leader
Follower | Dest.: Tainan
TaichungEXIT

Mobile and Vehicular Network Lab
Post-Accident• Insurance claim
– Investigation at the scene (agents and polices
• road-side surveillances
• costly and time consuming
– Lawsuit
– Bogus insurance claim
• £410m of motor insurance fraud detected in UK, 2009
Case Study 2: Networked DriverCam

Mobile and Vehicular Network Lab
How about an networking solution?• V2V + V2I
– CSI in vehicular networks
• Business model
– Incentive for insurance company
• A total package for customers
• Annual renewal of insurance policy (steady cash flow?)
Case Study 2: Networked DriverCam

Mobile and Vehicular Network Lab
• GM OnStar
– V2I: CDMA cellular network– Stolen Vehicle Assistance, Roadside Assistance, Remote Door
Unlock, Remote Horn and Light Flashing, Red Button Emergency Services and OnStar Remote Vehicle Diagnostics
– Subscribe Service: • Safe & Sound: $18.95/mth ($24.95 in Canada)
74
Case Study 3: GM OnStar
[1] OnStar, https://www.onstar.com/web/portal/landing[2] OnStar, http://en.wikipedia.org/wiki/OnStar, Wiki

Mobile and Vehicular Network Lab
• GM OnStar
– Car Rental Service
75
Case Study 3: GM OnStar
[1] Telematies News, http://telematicsnews.info/2011/10/06/us-gm-onstar-and-relayrides-launch-car-sharing-program/[2] automotive.com, http://blogs.automotive.com/gm-to-begin-onstar-carsharing-anyone-have-an-available-corvette-59543.html

Mobile and Vehicular Network Lab
Conclusion
• New technology: vehicular networks New opportunity: cooperative systems.
• Change our world on the road - higher performance
– More Efficient: Greener, faster, more capacity
– Safer: zero injuries & fatalities
– Affordable: each vehicle only needs to know a few things
– New applications: remain to be unleashed
• Good research & business opportunities!
• Shameless Plug: MVNL welcomes you.
76

Mobile and Vehicular Network Lab
Thank you!
Please feel free to contact me for questions:
Prof. Michael Tsai (蔡欣穆)
Mobile and Vehicular Network Lab
Dept. of Computer Science and Information Engineering
National Taiwan University
77