Embed Size (px)
Citation preview

Psychologie française 55 (2010) 171–180
Disponible en ligne sur www.sciencedirect.com
Article original
Vers une prise en compte de la contrainte liéeà l’effecteur dans la dynamique de
coordination graphomotrice
Constraints due to the effector on graphomotorcoordination dynamics
J. Danna 1,∗, Y. Wamain 2, V. Kostrubiec 3,J. Tallet 4, P.-G. Zanone 5
UPS, laboratoire adaptation perceptivo-motrice et apprentissage (LAPMA), université de Toulouse,118, route de Narbonne, 31062 Toulouse cedex 9, France
Recu le 24 septembre 2009 ; accepté le 6 mai 2010
Résumé
À partir d’un rapprochement entre deux expériences menées indépendamment sur un même paradigme, leprésent article s’intéresse aux contraintes qui influencent la graphomotricité. Une étude princeps menée parAthènes et al. (2004) sur la reproduction de formes graphiques simples montre que cinq formes sont préfé-rentielles lorsque le bras effecteur n’est pas contraint. Lorsque l’avant-bras est fixé, nos résultats suggèrentl’existence de seulement quatre formes préférentielles. Nos résultats suggèrent que l’ajout d’une contrainteliée sur l’effecteur n’a pas forcément un effet délétère sur le paysage graphomoteur. Si cette hypothèse étaitconfirmée par des études ultérieures, il serait possible d’exploiter les résultats dans le but de faire apparaîtrede nouvelles formes préférentielles qui ne sont pas spontanément reproduites avec précision sans contrainteajoutée.© 2010 Société francaise de psychologie. Publié par Elsevier Masson SAS. Tous droits réservés.
Mots clés : Graphomotricité ; Théorie des patrons dynamiques ; Copie
∗ Auteur correspondant.Adresse e-mail : [email protected] (J. Danna).
1 Doctorant.2 Doctorant.3 Maître de conférences.4 Maître de conférences.5 Professeur.
0033-2984/$ – see front matter © 2010 Société francaise de psychologie. Publié par Elsevier Masson SAS. Tous droits réservés.doi:10.1016/j.psfr.2010.05.001

172 J. Danna et al. / Psychologie française 55 (2010) 171–180
Abstract
Comparing two independent experiments following the same paradigm, the present article ponders theinfluence of constraints on graphic activity. A first study realized by Athènes et al. (2004) on the repro-duction of simple graphic shapes revealed the presence of five preferential shapes when the effector wasnot constrained. With the forearm fastened, our results suggest that four only shapes are preferential whenreproducing these same shapes. Overall, our findings suggest that the addition of a constraint related to theeffector does not necessarily imply a negative effect on the graphic landscape. Were this assumption to beconfirmed by full-fledged studies, it would be then possible to reveal new preferential shapes that are notspontaneously reproduced without additional constraints.© 2010 Société francaise de psychologie. Published by Elsevier Masson SAS. All rights reserved.
Keywords: Graphic motor behavior; Dynamic patterns theory; Copy
1. Introduction
Le présent article vise à mieux comprendre comment le système moteur s’arrange pour produiredes formes graphiques en réponse à des contraintes qui influencent leur production. À cette fin,il tente de rapprocher les résultats de deux expériences menées indépendamment dans notrelaboratoire, mais réalisées selon un même paradigme.
La graphomotricité fait partie des activités motrices probablement quotidiennes de l’êtrehumain adulte. Notre niveau d’expertise dans cette activité est donc indiscutable. Cependant,lorsque nous devons produire différents tracés graphiques simples, il est aisé de constater que,malgré ce haut niveau d’expertise, certains tracés sont plus faciles à produire que d’autres. Parexemple, Dounskaia et al. (2000) se sont intéressés à la production de tracés graphiques simplessans modèle visuel. Les participants devaient produire des traits dans diverses orientations, entraî-nant ainsi l’usage de mouvements conjoints de va-et-vient du poignet et des doigts. Les résultatsindiquent que chez les droitiers, il est très aisé de tracer un trait dans l’orientation à 1h30, c’est-à-dire lorsque la flexion-extension du poignet coïncide avec la flexion-extension de la pincepouce-index. Il est autrement plus difficile de tracer le même trait dans l’orientation opposée, à10h30, impliquant une flexion du poignet simultanée avec l’extension de la pince, et vice-versa.Les tracés dans l’orientation à 1h30 s’avèrent être plus précis, moins variables et plus rapides dansles autres orientations. Tout se passe comme si, parmi les innombrables orientations possibles pou-vant être produites par la main, le système moteur préférait produire un tracé dans l’orientationà 1h30, définissant ainsi des directions dites « préférentielles » dans la graphomotricité (VanSommers, 1984).
La question qui se pose alors est de comprendre l’apparition de telles préférences. Cette ques-tion est au centre de préoccupations d’une approche dynamique de la coordination motrice (voirKelso, 1995, pour une revue). Dans cette approche, les préférences pour certaines directionspourraient être considérées comme le fruit d’une préférence du système moteur pour certaines« coordinations motrices ». Une coordination motrice correspond à un certain arrangement deseffecteurs mobilisés pour réaliser une tâche. Il est possible de coordonner de différentes faconsles principaux effecteurs, à savoir l’épaule, le coude, le poignet et les phalanges pour produire unmême tracé graphique (Latash et al., 2007). Bernstein (1967) propose que l’ensemble de possi-bilités de mouvement dans l’espace résulte de la redondance des degrés de liberté (DDL). Ainsi,pour tracer la lettre ‘o’, nous pouvons soit activer seulement l’épaule dans un mouvement de

J. Danna et al. / Psychologie française 55 (2010) 171–180 173
rotation, soit poser l’avant-bras sur la table et activer seulement les phalanges du pouce et del’index. Il s’avère que parmi les nombreuses facons d’arranger les effecteurs corporels afin deproduire un même tracé écrit, le système moteur privilégie certaines coordinations motrices ditesalors préférentielles. Comment apparaît et s’organise une coordination motrice préférentielle ? Ilsemble difficilement concevable que le système nerveux central (SNC) soit capable de gérer etde réguler l’ensemble des DDL moteurs de part leur nombre (plus de 300 seulement au niveauanatomique) et leurs natures diverses (anatomique, neuronale, etc.). Les théories de « l’auto-organisation » permettent de comprendre comment des systèmes complexes dotés d’une multitudede DDL démontrent spontanément un agencement dans le temps et l’espace, une structure spa-tiotemporelle. Les structures spatiotemporelles peuvent « émerger », c’est-à-dire apparaître sansl’intervention d’une commande prescriptive contraignant spécifiquement et individuellement tousles DDL impliqués, mais simplement par des interactions qu’il n’est pas nécessaire de décrire pouren comprendre le comportement global. Plus simplement, c’est grâce à des interactions localesentre les différents éléments qui composent le système qu’émergent ce que Bernstein appelaitdes « synergies » ou d’autres plus récemment « des structures coordinatives » (Kelso et al., 1980),c’est-à-dire des coordinations préférentielles qu’il n’est pas nécessaire ni possible de décrireautrement que par leur manifestation sur le comportement global. Pour revenir à l’expérience deDounskaia et al. (2000) décrite plus haut, la préférence du système moteur pour le tracé dansl’orientation à 1h30 peut être comprise comme la manifestation spontanée d’une coordinationpréférentielle entre le poignet et la pince.
De nombreuses études ont modélisé la coordination du poignet et de la pince par le mouvementde deux oscillateurs, l’oscillateur-poignet et l’oscillateur-pince (Beek et Beek, 1988 ; Hollerbach,1981 ; Strogatz et Stewart, 1993). Selon ces modèles, le tracé de traits orientés à 1h30 correspondà un mouvement simultané de l’oscillateur-poignet et l’oscillateur-pince, dans une coordinationdite « en phase ». À l’inverse, la production de traits orientés à 10h30 correspond au mouvementopposé de l’oscillateur-poignet et l’oscillateur-pince, à savoir une coordination dite « en anti-phase ». De manière générale, les coordinations en phase et en anti-phase sont préférentiellesdans la graphomotricité. Ce résultat n’est pas anodin car il se généralise largement au-delà dudomaine graphique, montrant ainsi sa robustesse. En effet, il se trouve que ces deux mêmes coor-dinations sont également préférentielles dans de nombreuses autres tâches motrices (coordinationmain-jambe ; coordination bimanuelle avec index ou poignets ; coordination des quatre membres ;Collins et Stewart, 1993 ; Kelso, 1984 ; Kelso et Jeka, 1992 ; Schöner et al., 1986 ; Swinnen etWenderoth, 2004).
Une analyse plus poussée des mouvements préférentiels montre que, quels que soient la tâchemotrice et les effecteurs impliqués, les coordinations peuvent être mesurées par leur Phase Relative(PR), c’est-à-dire par le décalage de phase entre les mouvements des deux oscillateurs (Athènes etal., 2004 ; Zanone et Kelso, 1992) ou, pour simplifier, l’avance ou le retard qu’un des mouvementsde va-et-vient montre par rapport à l’autre. Comme la PR se mesure en degrés, la coordination en-phase correspond à 0◦ de PR et la coordination en antiphase à 180◦ de PR. À partir de cette mesure,il a été mis en évidence que la coordination en phase est plus précise, moins variable et plus rapideque la coordination en antiphase (Court et al., 2002 ; Kelso, 1984 ; Post et al., 2000 ; Schöner et al.,1986 ; Schöner et Kelso, 1988). La coordination en phase est donc préférée à la coordination enanti-phase, les deux étant, rappelons-le, préférées à toutes les autres. Pour revenir à la productiond’un tracé graphique, la plus grande aisance à produire des traits dans l’orientation à 1h30 peutainsi être expliquée par la préférence du système moteur à produire la coordination en phase.
Limiter l’activité graphomotrice à la production de traits peut paraître très réducteur. Au prixde quelques simplifications connues (Dooijes, 1983), Hollerbach (1981) a proposé un modèle

174 J. Danna et al. / Psychologie française 55 (2010) 171–180
oscillatoire de l’écriture (voir Annexe 1). Ce modèle permet de générer non seulement des coor-dinations aboutissant au tracé de traits mais également des coordinations aboutissant au tracé ducercle et d’ellipses. Dans une étude princeps menée dans notre laboratoire, Athènes et al. (2004)se sont demandés si d’autres formes que les traits pouvaient être identifiées comme préférentiellesparmi différentes ellipses pouvant être générées par le modèle d’Hollerbach (1981). La méthodeexpérimentale permettant d’identifier empiriquement les formes préférentielles a été introduitepar Zanone et Kelso 1992, (voir également Tuller et Kelso, 1985) sous le nom de scanning. Defacon générale, le scanning consiste à demander au participant de reproduire l’ensemble des PRvariant entre 0◦ et 180◦, par pas de 15◦. Adaptant le scanning à la graphomotricité via le modèled’Hollerbach (1981), Athènes et al. (2004) ont généré 13 formes graphiques requises, variant parpas de 15◦ de PR, entre 0◦ de PR (coordination en phase aboutissant à un trait orienté à 1h30) et180◦ de PR (coordination en anti-phase aboutissant à un trait orienté à 10h30) en passant par 90◦ dePR (coordination aboutissant à un cercle). Les traits et les ellipses étaient affichés sur une tablettegraphique et le sujet devait reproduire la forme ainsi présentée en tracant par-dessus le modèle(Fig. 1).
L’analyse de l’évolution de la PR produite en fonction de la PR requise permet de mettreen évidence un « paysage graphomoteur » reflétant les formes graphiques préférentielles d’unparticipant. La précision des formes produites peut être estimée par l’erreur constante (EC), quicorrespond à la différence signée entre la PR produite et la PR requise. Une EC positive indique quela PR de la forme produite est surestimée par rapport à la PR de la forme requise, tandis qu’uneEC négative indique une sous-estimation. À partir de cette variable, les formes préférentiellespeuvent être aisément identifiées à l’intersection entre la courbe de l’EC et l’axe des abscisses,c’est-à-dire lorsque la valeur absolue de l’EC moyenne est minimale (Zanone et Kelso, 1992).
À cette intersection, la pente de la courbe de l’EC peut être positive ou négative. Selonl’approche dynamique de la coordination motrice, une pente négative est interprétée comme lesigne d’une « attraction » des formes voisines vers la forme préférentielle (Kelso, 1995 ; Schöneret al., 1986). En effet, pour les formes de PR requise inférieure à la PR de la forme préférentielle,la PR produite est surestimée (EC positive) alors que pour les formes de PR requise supérieureà la forme préférentielle, la PR produite est sous-estimée (EC négative). Tout se passe commesi la forme préférentielle était systématiquement produite malgré le fait que des formes voisinessoient requises. Au contraire, une pente positive indique que la forme préférentielle exerce une« répulsion » sur la reproduction des formes voisines. La forme préférentielle est systématique-ment évitée lorsque des formes voisines sont requises. Ainsi, des formes préférentielles peuventavoir comme propriété d’être attractives ou répulsives.
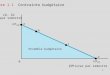
Comme le montre la Fig. 2, les résultats de l’étude princeps d’Athènes et al. (2004) révèlent queles formes préférentielles de reproduction graphique se situent autour de 0◦, 45◦, 90◦, 120–135◦
Fig. 1. Présentation des 13 formes impliquant la production de PR entre 0◦ et 180◦.

J. Danna et al. / Psychologie française 55 (2010) 171–180 175
Fig. 2. Évolution de l’EC moyenne de la PR produite en fonction de la PR des formes requises dans l’étude princepsd’Athènes et al. (2004). Les barres d’erreur correspondent à la variabilité interindividuelle de l’erreur. Les flèches localisentles formes préférentielles repérées par une valeur absolue minimale de l’EC moyenne.
et 180◦. Les pentes positives à 0◦, 90◦ et 180◦ définissent ces formes préférentielles comme étantrépulsives. Au contraire, les pentes négatives à 45◦ et 120–135◦ les définissent comme attractives.
Ce paysage graphomoteur est soumis à des « contraintes » limitant les possibilités d’actiondu système moteur à un moment donné (selon Baldissera et al. (2002) ; voir aussi Kelso, 1995),le terme de contrainte ne doit pas être compris comme un facteur qui empêche le mouvementou qui prescrit une PR spécifique ; il doit plutôt être compris comme un facteur qui empêche laproduction de toutes les PR possibles avec la même précision. Dans la graphomotricité, l’effecteurlui-même peut imposer une contrainte qui modifie le paysage graphomoteur. En effet, l’expériencede Sallagoïty et al. (2004) montre que la forme à 135◦ disparaît du paysage lorsque la main nondominante produit les formes. Le paysage graphomoteur est donc modifié lorsque l’effecteurchange.
Dans la suite de cet article, nous allons investiguer la question de comment le paysage grapho-moteur individuel peut être modifié suite à l’ajout d’une contrainte liée à l’effecteur. Une nouvelleexpérience a été menée dans notre laboratoire en exploitant le paradigme développé par Athèneset al. (2004). L’expérience était une tâche de reproduction qui consistait à recopier les formesgraphiques alors que l’avant-bras était fixé dans une orientation spécifique. Le rapprochementdes résultats de ces deux expériences nous amènera à discuter de la comparaison entre le paysagegraphomoteur non contraint (Athènes et al., 2004) et le paysage graphomoteur contraint.
2. Méthode
2.1. Population
Dix adultes droitiers (24,8 ± 1,47 ans, dont une femme) ont accepté de participer à l’Expérience1. Ils ne présentaient aucun trouble visuel ou moteur particulier et étaient naïfs quant à l’objectif del’étude. Le protocole expérimental avait été approuvé par le comité d’éthique de l’Université Tou-

176 J. Danna et al. / Psychologie française 55 (2010) 171–180
louse III. Avant de participer à l’expérience, les sujets ont donné leur accord signé, conformémentà la déclaration d’Helsinki.
2.2. Matériel
Les 13 formes graphiques générées par Athènes et al. (2004) ont été utilisées. Nous les appel-lerons les « formes requises ». Telles que présentées sur la Fig. 1, ces formes se dessinent selondifférentes PR allant de 0◦ à 180◦ par pas de 15◦. Ces formes requises étaient générées en noirsur fond blanc et affichées une par une au centre d’une tablette graphique (Wacom Cintiq WX12,26,11 × 16,32 cm) à l’aide du logiciel Matlab©. Un stylet magnétique servait à reproduire chaqueforme par-dessus le modèle. Dès que le stylet entrait en contact avec la tablette, les coordonnées desa position étaient enregistrées à une fréquence de 100 Hz, avec une précision spatiale de 0,5 mm.Les formes produites par les participants n’étaient pas affichées en retour.
2.3. Procédure
Les participants étaient assis sur un fauteuil, les deux bras posés sur une table. L’avant-bras dela main dominante était fixé dans l’alignement de l’axe des y de la tablette (à 12h00). La tâcheconsistait à recopier la forme requise par dessus le modèle à une vitesse spontanée. Le sens derotation (horaire et antihoraire) de la forme requise à reproduire était contrôlé et imposé par unindice visuel présenté avant chaque essai. Une fois l’essai lancé, la forme requise restait affichéeà l’écran durant dix cycles complets du stylet par-dessus le modèle. Les treize formes requisesétaient présentées aléatoirement. Chaque forme requise apparaissait quatre fois dans chaque sensde rotation. Au total, 104 essais ont été demandés par participant.
2.4. Analyse des données
A chaque essai, l’évolution de la trace du stylet était traitée cycle par cycle, afin de déterminerla PR de la forme produite (voir Zanone et Kelso, 1992, pour des détails). L’EC de la PR étaitensuite calculé. Elle correspond à la différence entre la PR de la forme produite et la PR de laforme requise. Cette variable est un indice de précision de la forme produite qui renseigne sur laprésence éventuelle d’un biais de production : rappelons qu’une EC négative correspond à unesous-estimation de la PR produite par rapport à la PR requise alors qu’une EC positive à unesurestimation.
Des Anovas avec le facteur Forme Requise (13) en mesures répétées ont été effectuées surl’EC. Pour toutes les analyses, le seuil de significativité était fixé à p ≤ 0,05.
3. Résultats
L’Anova a révélé un effet principal de la Forme Requise (F(12, 108) = 30,28, p < 0,0001). Uncontraste polynomial a indiqué une tendance d’ordre 5 (F(1, 9) = 77,87, p < 0,001). La Fig. 3présente les EC moyennes effectuées en fonction des formes requises (capturée par la régressionpolynomiale d’ordre 5, R2 = 0,97). Les contrastes de déviation, comparant la valeur absolue del’EC moyenne de chaque forme (sauf la dernière valeur à 180◦) à la valeur absolue moyennede l’EC de toutes les formes, montrent que trois groupes de formes ont une valeur absolue del’EC moyenne significativement inférieure à la valeur absolue moyenne de l’EC : 0◦, 45–60–75◦et 105–120◦ (p < 0,05). Elles révèlent également que deux groupes de formes ont une valeur

J. Danna et al. / Psychologie française 55 (2010) 171–180 177
Fig. 3. Évolution de l’EC moyenne de la PR produite en fonction de la PR des formes requises. Les barres d’erreurcorrespondent à la variabilité interindividuelle de l’EC. Les flèches localisent les formes préférentielles repérées par unevaleur absolue minimale de l’EC moyenne.
absolue de l’EC moyenne significativement supérieure à la valeur absolue moyenne de l’EC : 15◦et 150–165◦ (p < 0,01).
Les intersections entre la courbe de l’EC et l’axe des abscisses sont repérables autour de 0◦,45◦, 105◦ et 180◦, valeurs où l’EC moyenne est caractérisée par une valeur absolue minimale.
4. Discussion
A partir des résultats de deux expériences menées dans notre laboratoire, nous proposons dediscuter des similitudes et des différences entre le paysage graphomoteur non contraint (Athèneset al., 2004) et le paysage graphomoteur contraint. Rappelons que le paysage graphomoteur noncontraint est caractérisé par la présence de cinq formes préférentielles (Athènes et al., 2004).Les formes 0◦, 90◦ et 180◦ y sont repérées comme étant répulsives, alors que les formes à 45◦et 120–135◦ sont repérées comme étant attractives. Dans le paysage graphomoteur contraint parla fixation de l’avant-bras dans une orientation spécifique, les résultats révèlent la présence dequatre formes préférentielles. Il s’agit des formes à 0◦, 45◦, 105◦ et 180◦. Malgré l’absence depreuves plus fondées demandant plusieurs expériences supplémentaires, nous pouvons supposerque la fixation de l’avant bras modifie le paysage graphomoteur. Il semblerait que les formespréférentielles à 90◦ et 120◦–135◦ disparaissent alors que la forme à 105◦ apparaît comme une

178 J. Danna et al. / Psychologie française 55 (2010) 171–180
nouvelle forme préférentielle. Il est intéressant de noter que cette forme à 105◦ ne présente pas designe d’attraction ou de répulsion au sens strict du terme (Section 1). En effet, pour les formes dePR requises inférieures à 105◦ (75◦ et 90◦), la PR produite est sous-estimée et la pente positive del’EC suggère que la forme préférentielle à 105◦ agit plutôt comme un répulseur. Pour les formesde PR requises supérieures (120◦, 135◦ et 150◦), la PR produite est également sous-estimée et lapente négative de l’EC suggère que la forme préférentielle à 105◦ agit plutôt comme un attracteur.On peut donc conclure que la forme à 105◦ est préférentielle dans le paysage graphomoteurcontraint, mais son statut d’attracteur ou de répulseur est difficile à déterminer.
Comment pourrait-on expliquer l’apparition d’une nouvelle forme préférentielle à 105◦ audétriment de la disparition des formes préférentielles à 90◦ et à 120–135◦ ? Selon l’approche dessystèmes dynamiques, l’ordre de la disparition des patrons préférentiels suit l’ordre inverse deleur stabilité respective (Kelso, 1995). Les expériences de Sallagoïty et al. (2004) montrent quel’augmentation de la vitesse d’écriture ou l’utilisation de la main non dominante font disparaîtreles formes préférentielles à 90◦ et 120–135◦. Quel que soit le type de contrainte (augmentationde vitesse, de changement effecteur ou de fixation de l’avant-bras), les formes affectées semblentêtre toujours celles à 90◦ et 120–135◦. Notons que dans le paysage graphomoteur non contraint(Athènes et al., 2004), il s’agit des formes préférentielles les moins précises (voir égalementl’expérience sur la production de cercles de Dounskaia et al., 2000). Il n’est donc pas tellementsurprenant que ces formes soient les premières affectées par un ajout de contraintes.
Quant à l’éventuelle apparition de la nouvelle forme à 105◦, notons qu’il s’agit d’une formeintermédiaire par rapport aux deux formes préférentielles préexistantes les plus proches, à 90◦et 120–135◦. Ce résultat n’est pas anodin au vu de la littérature concernant l’apprentissage d’unnouveau patron de coordination (Amazeen, 2002 ; Zanone et Kelso, 1997 ; Tallet et al., 2008).En effet, il a été constaté que le premier patron qui apparaît lors de l’apprentissage n’est pasforcément le patron requis, mais plutôt un patron intermédiaire, situé à égale distance entre lespatrons préférentiels préexistants. Par exemple, Tallet et al. (2008) ont étudié l’apprentissage d’unnouveau patron à 135◦ de PR chez des participants manifestant initialement un paysage dynamiqueavec deux attracteurs, à 0◦ et à 180◦. Leurs résultats suggèrent que l’apprentissage du patron à135◦ est précédée par l’émergence d’un patron non requis, situé à égale distance des deux patronspréférentiels préexistants (≈90◦ de PR). Ce même phénomène pourrait expliquer l’apparitionde la forme intermédiaire à 105◦ dans l’Expérience 2. Étant donné que, dans l’Expérience 2, lacontrainte imposée ne spécifie pas la valeur de la PR requise comme dans les expériences surl’apprentissage, on peut supposer que l’ajout d’une contrainte spécifique (comme l’apprentissage)ou non spécifique (liée à l’effecteur), favoriserait l’apparition d’une forme intermédiaire parrapport aux deux formes préexistantes les plus proches. Cela nous amène à nous interroger plusen avant sur la nature de la contrainte ajoutée.
Bien que des modifications du paysage graphomoteur avec l’ajout de contraintes non spéci-fiques aient déjà été rapportées dans la littérature (voir également Buchanan et al., 1996, pourles effets d’une augmentation de vitesse de mouvement), le rapprochement des deux expériencesprésentées dans cet article suggère que la nature de contrainte n’est pas sans importance. La modi-fication du paysage au voisinage de la forme à 120–135◦ ne semble pas se réaliser de la mêmefacon selon que la contrainte appliquée à l’effecteur est une augmentation de la vitesse, un change-ment d’effecteur ou la fixation de l’avant-bras dans une orientation spécifique. Les expériences deSallagoïty et al. (2004) ont révélé uniquement une réduction du nombre de formes préférentielles,passant de cinq à quatre lorsque la vitesse augmente ou lorsque l’effecteur change. En revanche,dans l’Expérience 1, tout se passe comme si les formes à 120–135◦ et à 90◦ disparaissaient aubénéfice de l’apparition d’une nouvelle forme préférentielle à 105◦. Aussi pouvons-nous supposer

J. Danna et al. / Psychologie française 55 (2010) 171–180 179
que, contrairement aux autres contraintes étudiées jusqu’ici (vitesse, non-dominance du membre),la manipulation de la contrainte liée à l’effecteur amène bien à la modification du paysage gra-phomoteur, mais sans qu’elle n’ait forcément un effet délétère sur le paysage graphomoteur. Sicette hypothèse était vérifiée, elle pourrait présenter un intérêt pratique sur l’apprentissage ou laremédiation de l’écriture. Concrètement, appliquer une contrainte à l’effecteur (e.g., en manipu-lant l’objet scripteur ou le plan de travail de manière à imposer une configuration particulière àl’effecteur) pourrait permettre de faire apparaître de nouvelles formes préférentielles qui ne sontpas spontanément reproduites avec précision sans contrainte ajoutée (ici, 105◦).
Pour conclure, cet article n’a pas la prétention de fournir des résultats expérimentaux définitifsconcernant l’effet des contraintes liées à l’effecteur sur la graphomotricité. Il propose simplementd’ouvrir des pistes de réflexion et de recherche. Une idée centrale de notre point de vue concernel’importance primordiale que revêt la prise en compte de l’effecteur impliqué dans l’acte gra-phomoteur. L’ajout de contraintes appliquées à l’effecteur pourrait avoir un effet positif dans la(re)production de formes jusqu’alors difficiles voire impossibles à réaliser.
Conflit d’intérêt
Aucun.
Annexe 1.
Hollerbach (1981) a montré comment générer différentes formes graphiques simples à partirde la combinaison entre deux oscillateurs orthogonaux d’équations :
x(t) = Ax cos(ωx(t)) + Φx)
y(t) = Ay cos(ωy(t)) + Φy)
où Ax et Ay sont l’amplitude de chaque oscillateur, ωx et ωy leur fréquence et Φx et Φyleur phase. L’amplitude correspond à la taille de l’oscillation, la fréquence au nombre de cycleseffectués par seconde et la phase à la proportion d’un cycle parcouru à un instant donné (Pikovskyet al., 2001).
Références
Amazeen, P.G., 2002. Is dynamics the content of a generalized motor program for rythmic interlimb coordination? Journalof Motor Behavior 34 (3), 233–251.
Athènes, S., Sallagoïty, I., Zanone, P-.G., Albaret, J-.M., 2004. Evaluating the coordination dynamics of handwriting.Human Movement Science 23, 621–641.
Baldissera, F., Borroni, P., Cavallari, P., Cerri, G., 2002. Excitability changes in human corticospinal projections to forearmmuscles during voluntary movement of ipsilateral foot. Journal of Physiology 539, 903–911.
Beek, P.J., Beek, W.J., 1988. Tools for constructing dynamical models of rhythmic movement. Human Movement Science7, 301–342.
Bernstein, N.A., 1967. The co-ordination and regulation of movements. Pergamon Press, Oxford.Buchanan, J.J., Kelso, J.A.S., Fuchs, A., 1996. Coordination dynamics of trajectory formation. Biological Cybernetics
74, 41–54.Collins, J.J., Stewart, I.N., 1993. Hexapodal gaits and coupled nonlinear oscillator models. Biological Cybernetics 68 (4),
287–298.Court, M.L.J., Bennett, S.J., Williams, A.M., Davids, K., 2002. Local stability in coordinated rhythmic movements:
fluctuations and relaxation times. Human Movement Science 21, 39–60.Dooijes, E.H., 1983. Analysis of handwriting movements. Acta Psychologica 54, 99–114.

180 J. Danna et al. / Psychologie française 55 (2010) 171–180
Dounskaia, N., van Gemmert, A.W.A., Stelmach, G.E., 2000. Interjoint coordination during handwriting-like movements.Experimental Brain Research 135, 127–140.
Hollerbach, J.M., 1981. An oscillation theory of handwriting. Biological Cybernetics 39, 139–156.Kelso, J.A.S., 1984. Phase transitions and critical behavior in human bimanual coordination. American Journal of
Physiology, Regulatory, Integrative and Comparative Physiology 15, R1000–R1004.Kelso, J.A.S., 1995. Dynamic Patterns: the Self-Organization of Brain and Behavior. MIT Press, Cambridge, Massachu-
setts.Kelso, J.A.S., Holt, K.G., Kugler, P.N., Turvey, M.T., 1980. On the concept of coordinative structures and dissipative
structures: II. Empirical lines of convergence. In: Dans Stelmach, G.E., Requin, J. (Eds.), Tutorials in Motor Behavior.North Holland, NY.
Kelso, J.A.S., Jeka, J.J., 1992. Symmetry breaking dynamics of human multilimb coordination. Journal of ExperimentalPsychology: Human Perception and Performance 18, 645–688.
Latash, M.L., Scholz, J.P., Schöner, G., 2007. Toward a new theory of motor synergies. Motor Control 11, 275–307.Pikovsky, A., Rosenblum, M., Kurths, J., 2001. Synchronization: a Universal Concept in Nonlinear Sciences. Cambridge
University Press, Cambridge.Post, A.A., Peper, C.E., Beek, P.J., 2000. Relative phase dynamics in perturbed interlimb coordination: the effects of
frequency and amplitude. Biological Cybernetics 83 (6), 529–542.Sallagoïty, I., Athènes, S., Zanone, P-.G., Albaret, J-.M., 2004. Stability of coordination patterns in handwriting: Effects
of speed and hand. Motor Control 8, 405–421.Schöner, G., Kelso, J.A.S., 1988. Dynamics pattern generation in behavioral and neural systems. Science 239, 1513–1520.Schöner, G., Haken, H., Kelso, J.A.S., 1986. A stochastic theory of phase transitions in human hand movement. Biological
Cybernetics 53 (4), 247–257.Strogatz, S.H., Stewart, I., 1993. Coupled oscillators and biological synchronization. Scientific American 269 (6), 102–109.Swinnen, S.P., Wenderoth, N., 2004. Two hands, one brain: cognitive neuroscience of bimanual skill. Trends in Cognitive
Sciences 8 (1), 18–25.Tallet, J., Kostrubiec, V., Zanone, P.-G., 2008. The role of stability in the dynamics of learning, memorizing, and forgetting
new coordination patterns. Journal of Motor Behavior 40 (2), 103–116.Tuller, B., Kelso, J.A.S., 1985. Bimanual coordination following commissurotomy. Bulletin of the Psychonomic Society
23 (4), 282–1282.Van Sommers, P., 1984. Drawing and Cognition: Descriptive and Experimental Studies of Graphic Production Processes.
Cambridge University Press, New York.Zanone, P.-G., Kelso, J.A.S., 1992. Evolution of behavioral attractors with learning: non equilibrium phase transition.
Journal of Experimental Psychology: Human Perception and Performance 18 (2), 403–421.Zanone, P.-G., Kelso, J.A.S., 1997. Coordination dynamics of learning and transfer: collective and component levels.
Journal of Experimental Psychology: Human Perception and Performance 23 (5), 1454–1480.