Embed Size (px)
Citation preview
VETORES NO ² E NO ³
Álgebra Linear e Geometria Analítica – Prof. Aline Paliga
2.1 DECOMPOSIÇÃO DE UM VETOR NO PLANO
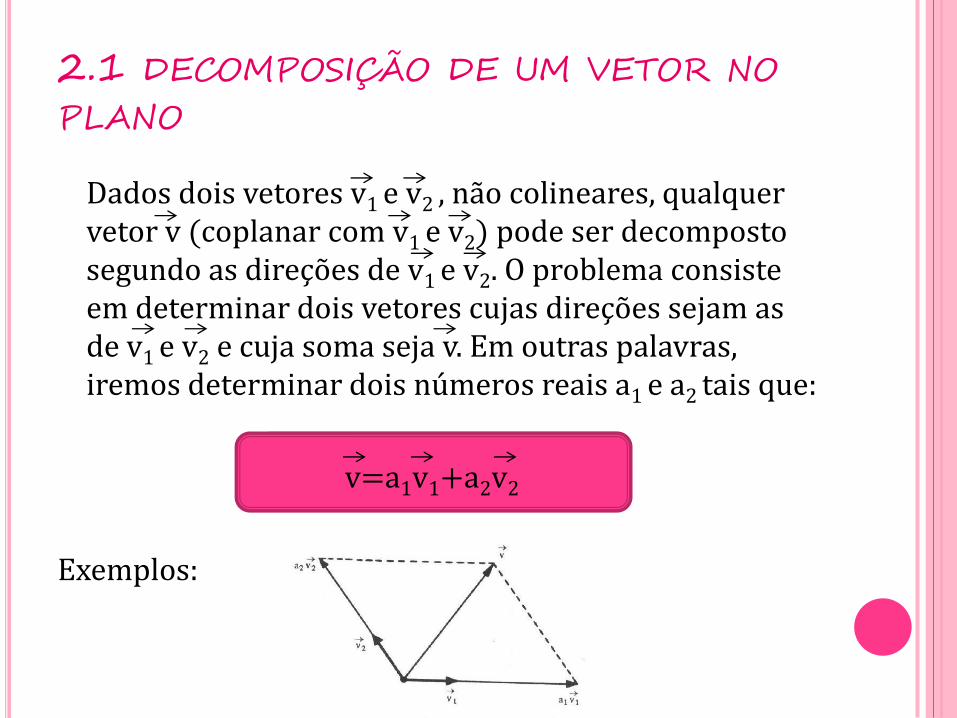
Dados dois vetores v1 e v2 , não colineares, qualquer vetor v (coplanar com v1 e v2) pode ser decomposto segundo as direções de v1 e v2. O problema consiste em determinar dois vetores cujas direções sejam as de v1 e v2 e cuja soma seja v. Em outras palavras, iremos determinar dois números reais a1 e a2 tais que:
v=a1v1+a2v2
Exemplos:
Sempre que v estiver representado por:
Dizemos que v é combinação linear de v1 e v2 e que o par de vetores v1 e v2 é a base no plano. Os números a1 e a2 são chamados componentes ou coordenadas de v em relação à base v1 , v2 .
v=a1v1+a2v2
conjunto ordenado
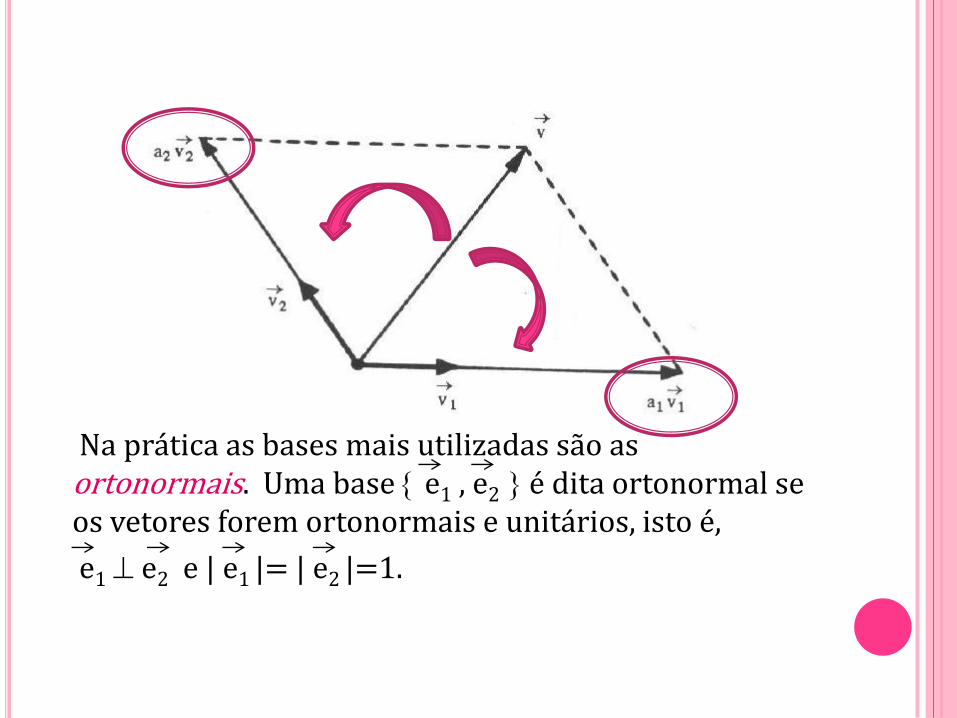
Na prática as bases mais utilizadas são as ortonormais. Uma base e1 , e2 é dita ortonormal se os vetores forem ortonormais e unitários, isto é,
e1 e2 e | e1 |= | e2 |=1.
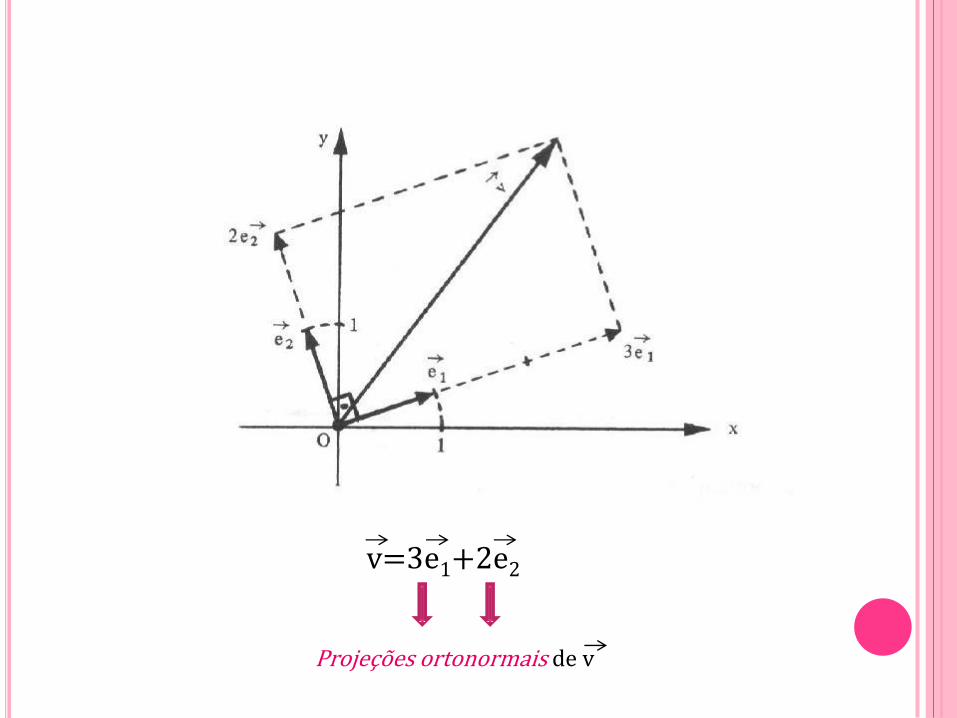
v=3e1+2e2
Projeções ortonormais de v

{i,j} Base canônica Usaremos somente esta base
Sempre ortogonal, então chamaremos de projeção.
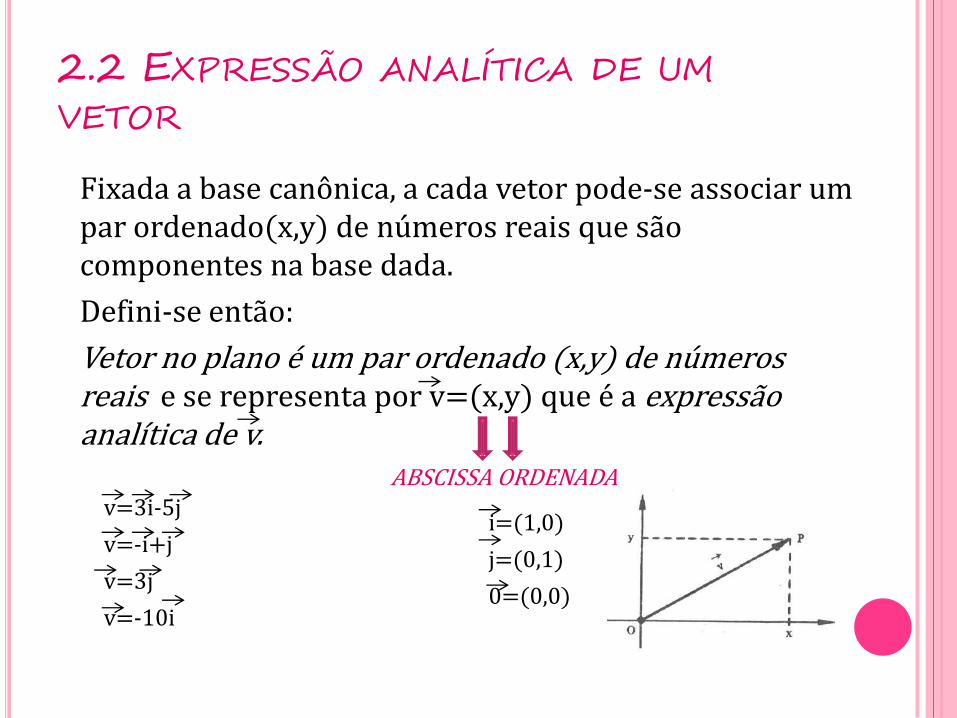
2.2 EXPRESSÃO ANALÍTICA DE UM VETOR
ABSCISSA ORDENADA
Fixada a base canônica, a cada vetor pode-se associar um par ordenado(x,y) de números reais que são componentes na base dada.
Defini-se então:
Vetor no plano é um par ordenado (x,y) de números reais e se representa por v=(x,y) que é a expressão analítica de v.
v=3i-5j
v=-i+j
v=3j
v=-10i
i=(1,0)
j=(0,1)
0=(0,0)
2.3 IGUALDADE E OPERAÇÕES
Dois vetores u=(x1,y1) e v=(x2, y2) são iguais, se, e somente se, x1=x2 e y1=y2, e escreve-se u=v.
Exemplo: Os vetores são iguais.
2.3.1 IGUALDADE
2.3.2 OPERAÇÕES Sejam os mesmos vetores u e v e a∈ℝ. Defini-se:
a) u+v=(x1+x2,y1+y2)
b)au=(a x1,ay1)
Exemplo:
(3,5) (3,5)u e v
As definições acima e as operações algébricas dos números reais permitem demonstrar as propriedades estudadas anteriormente em operações com vetores.
a) para quaisquer vetores u, v e w, tem-se:
u+v=v+u
(u+v)+w=u+(v+w)
u+0=u
u+(-u)=0
b) para quaisquer vetores u e v e os números reais a e b, tem-se:
a(bv)=(ab)v
(a+b)u=au+bu
a(u+v)=au+av
1v=v
2.4 VETOR DEFINIDO POR DOIS PONTOS
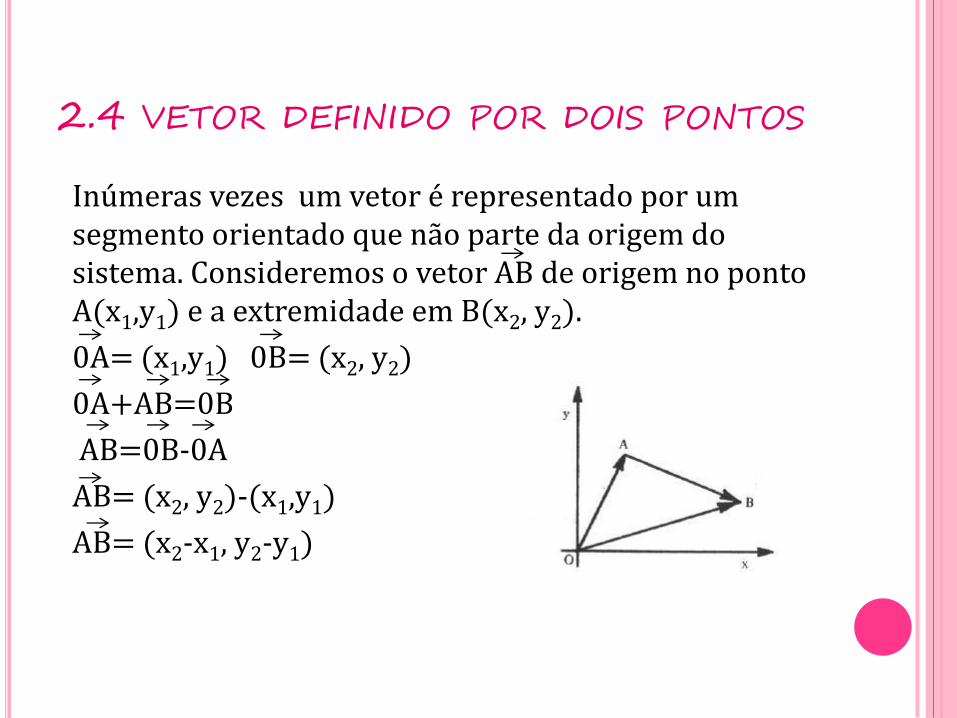
Inúmeras vezes um vetor é representado por um segmento orientado que não parte da origem do sistema. Consideremos o vetor AB de origem no ponto A(x1,y1) e a extremidade em B(x2, y2).
0A= (x1,y1) 0B= (x2, y2)
0A+AB=0B
AB=0B-0A
AB= (x2, y2)-(x1,y1)
AB= (x2-x1, y2-y1)
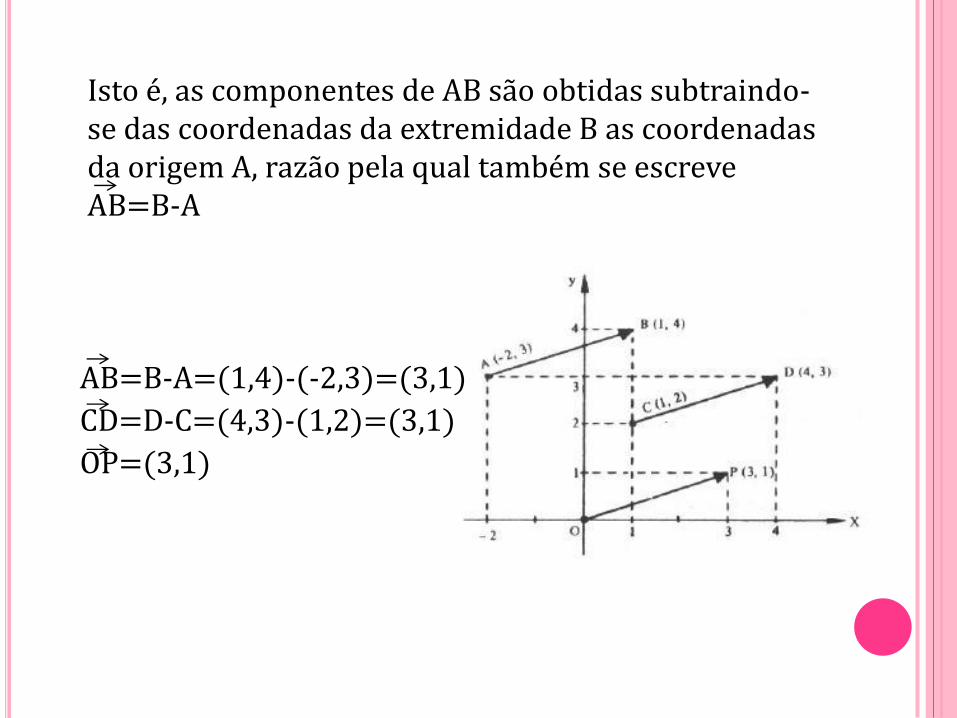
AB=B-A=(1,4)-(-2,3)=(3,1)
CD=D-C=(4,3)-(1,2)=(3,1)
OP=(3,1)
Isto é, as componentes de AB são obtidas subtraindo-se das coordenadas da extremidade B as coordenadas da origem A, razão pela qual também se escreve AB=B-A
No espaço, qualquer conjunto v1 , v2 ,v3} de três vetores não coplanares é uma base e, de forma análoga, demonstra-se que todo vetor v do espaço é combinação linear dos vetores base, isto é, sempre existem números reais a1, a2 e a3 tais que:
Uma base no espaço é ortonormal se os três vetores forem unitários e dois a dois, ortogonais.
Base canônica no espaço: i , j ,k}
2.5 DECOMPOSIÇÃO NO ESPAÇO
v=a1v1+a2v2+a3v3
ABSCISSA ORDENADA
COTA
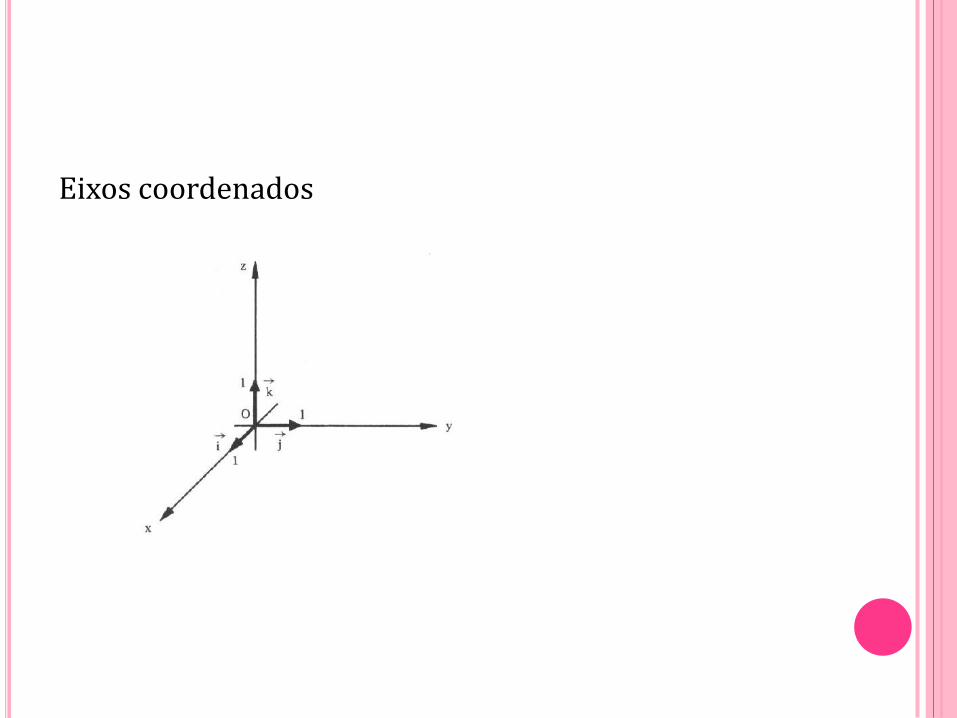
Eixos coordenados
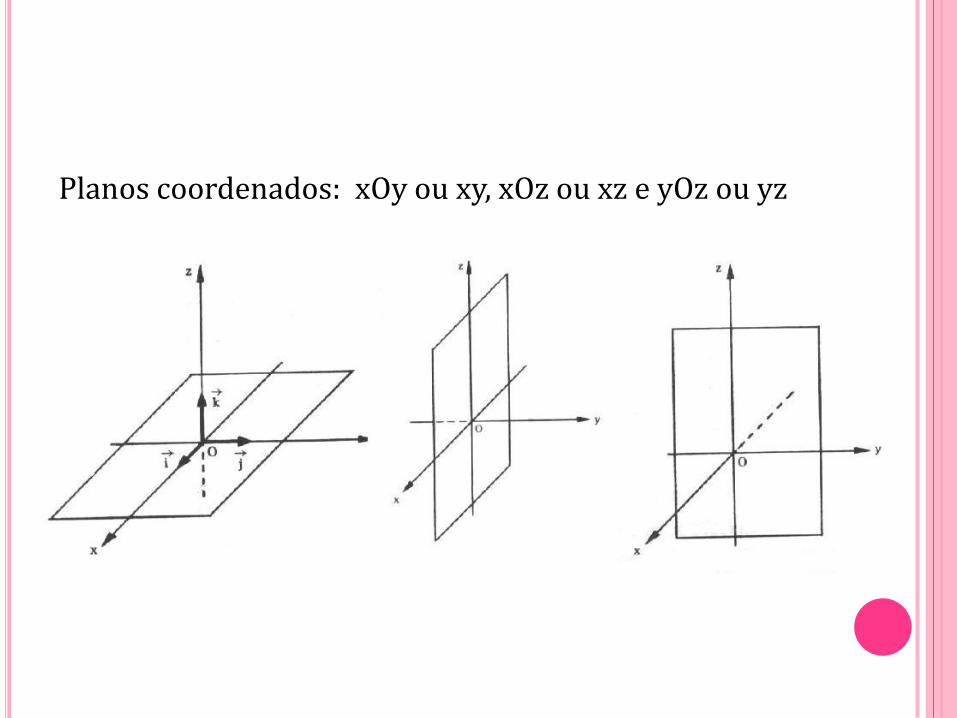
Planos coordenados: xOy ou xy, xOz ou xz e yOz ou yz
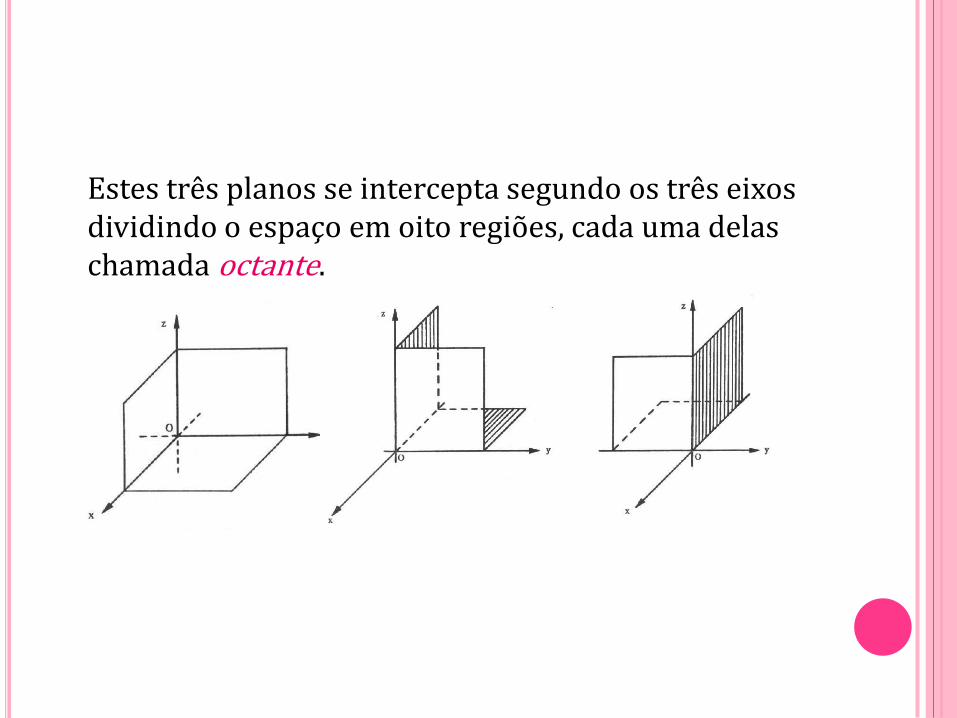
Estes três planos se intercepta segundo os três eixos dividindo o espaço em oito regiões, cada uma delas chamada octante.
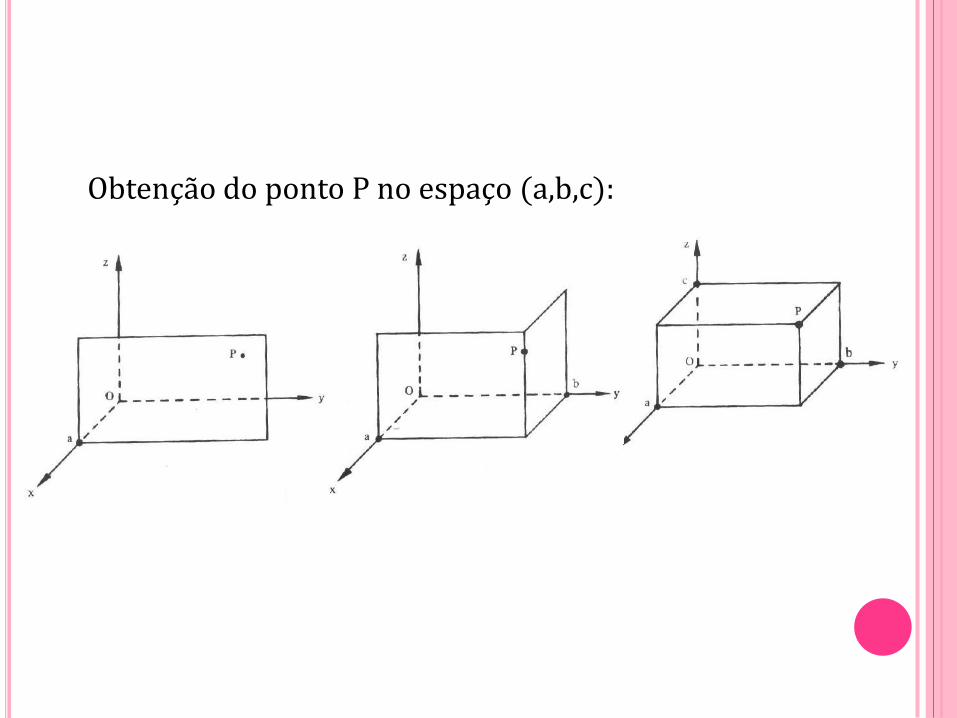
Obtenção do ponto P no espaço (a,b,c):
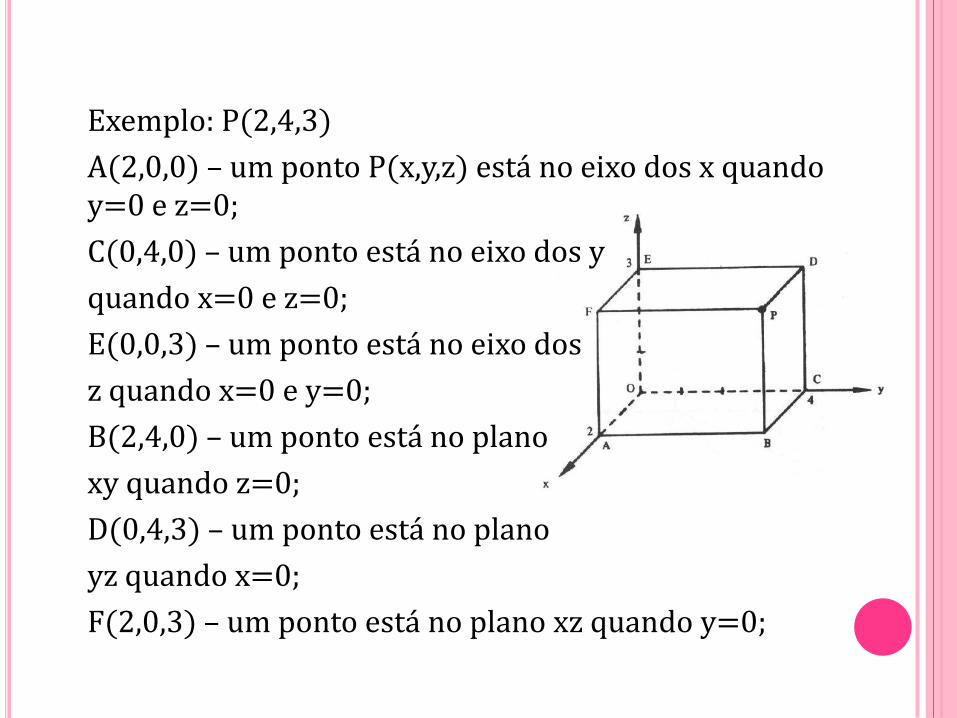
Exemplo: P(2,4,3)
A(2,0,0) – um ponto P(x,y,z) está no eixo dos x quando y=0 e z=0;
C(0,4,0) – um ponto está no eixo dos y
quando x=0 e z=0;
E(0,0,3) – um ponto está no eixo dos
z quando x=0 e y=0;
B(2,4,0) – um ponto está no plano
xy quando z=0;
D(0,4,3) – um ponto está no plano
yz quando x=0;
F(2,0,3) – um ponto está no plano xz quando y=0;
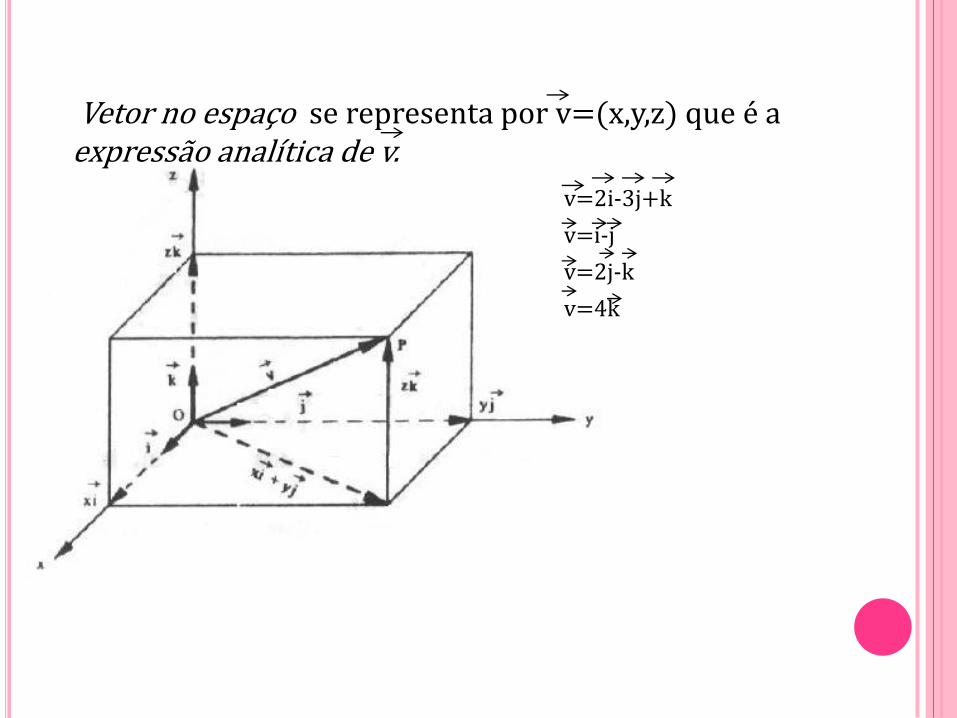
Vetor no espaço se representa por v=(x,y,z) que é a expressão analítica de v.
v=2i-3j+k
v=i-j
v=2j-k
v=4k
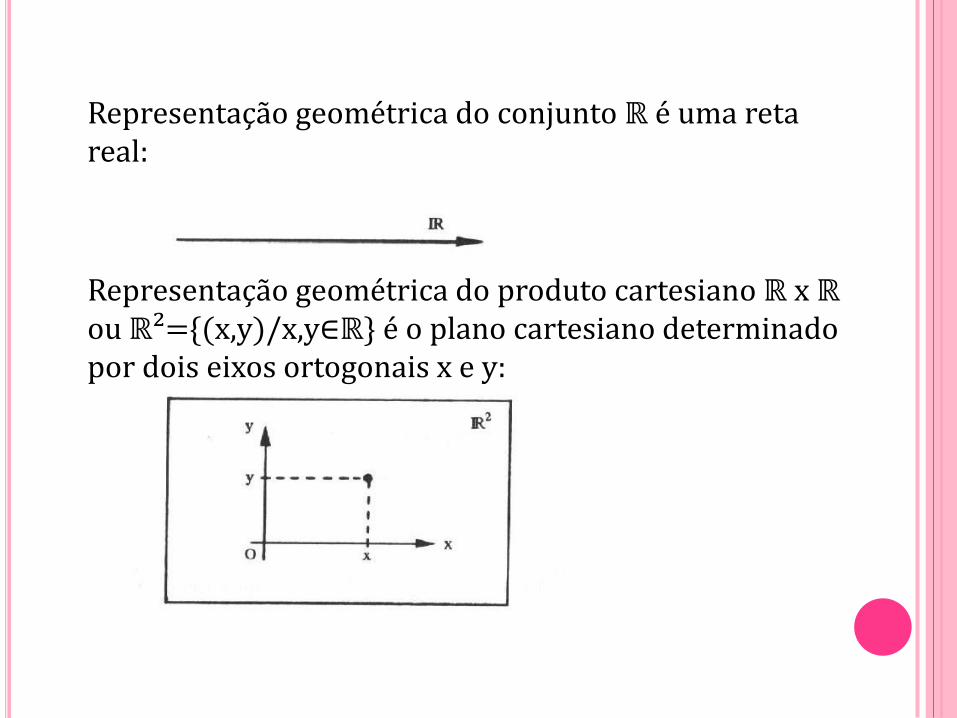
Representação geométrica do conjunto ℝ é uma reta real:
Representação geométrica do produto cartesiano ℝ x ℝ ou ℝ²={(x,y)/x,y∈ℝ} é o plano cartesiano determinado por dois eixos ortogonais x e y:
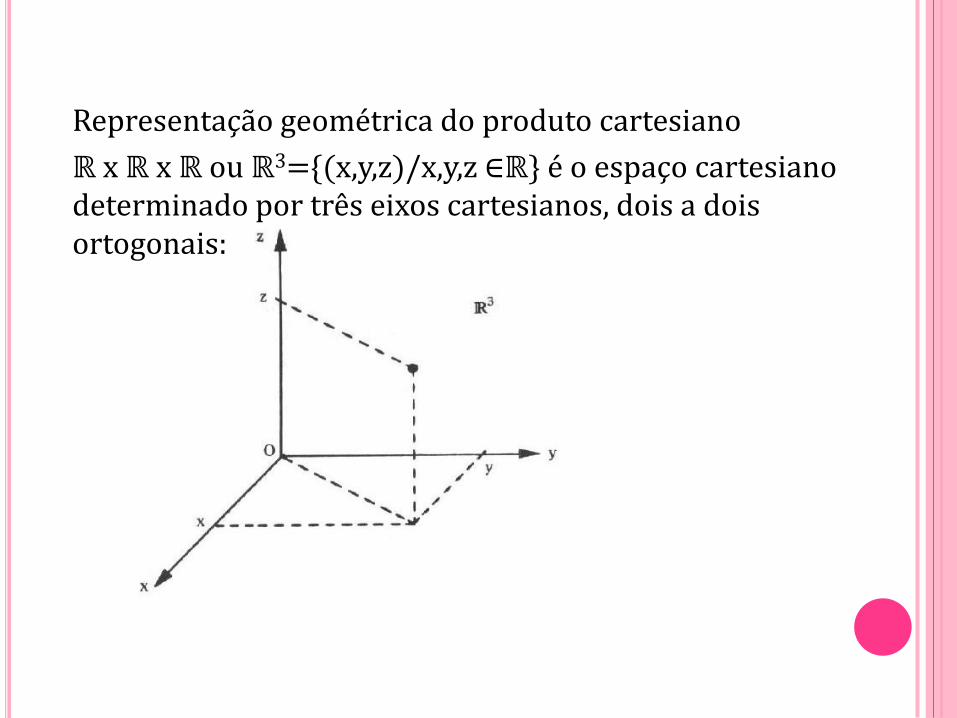
Representação geométrica do produto cartesiano
ℝ x ℝ x ℝ ou ℝ3={(x,y,z)/x,y,z ∈ℝ} é o espaço cartesiano determinado por três eixos cartesianos, dois a dois ortogonais:
Da mesma forma como tivemos no plano, teremos no espaço:
I) Dois vetores u=(x1,y1,z1) e v=(x2,y2,z2) são iguais se, e somente se, x1=x2 , y1=y2 e z1=z2;
II) Dados os vetores acima e a∈ℝ, defini-se:
u+v= =(x1+x2,y1+y2, z1 +z2)
au=(ax1,ay1,az1)
III) Se A =(x1,y1,z1) e B=(x2,y2,z2) são dois pontos quaisquer no espaço, então:
AB= (x2-x1,y2-y1, z2 -z1)
2.6 IGUALDADE – OPERAÇÕES – VETOR DEFINIDO POR DOIS PONTOS
Vimos que se dois vetores u e v são colineares (ou paralelos), existe um número k tal que u=kv, ou seja,
(x1,y1,z1) =k(x2,y2,z2) ou
(x1,y1,z1) =(kx2, ky2,kz2)
mas pela definição de igualdade de vetores:
x1=kx2
y1= ky2 ou
z1=kz2
u//v
condição de paralelismo
coordenadas proporcionais
2.7 CONDIÇÃO DE PARALELISMO DE DOIS VETORES
1 1 1
2 2 2
x y zk
x y z





























