-
8/23/2019 Voller
1/14
IM A Journal of Numerical Analysis (1985) 5, 201-214
Implicit Finite-difference Solutions of the EnthalpyFormulation
of Stefan ProblemsV . R. VOLLER
Centre for N umerical M odelling a nd Process Analysis,School of
Mathem atics, Statistics and Computing,Tham es Polytechnic,
Wellington Street, Londo n SE\i 6PF
[Received 29 February 1984 and in revised form 26 September
1984]When related to a phase-change problem, an
implicitfinite-differencediscretizationof the enthalpy formulation
results in a system of non-linear equations at each timestep. In
this paper, various numerical enthalpy methods based on
suchdiscretizations are outlined and examined. An alternative
discretization for anenthalpy formulation is developed on
separating the sensible and latent heat terms.This approach also
results in a non-linear system of equations but with the
non-linearity isolated as a source term of nodal latent heat. This
offers an advantageover the previous techniques in that only one
variable (i.e. temperature) is solved forin the resulting iterative
scheme. Comparison with simple one- and two-dimensionaltest
problems indicate that the computing requirements, with the
alternativediscretization, are reduced by between 20 and 50%.
1. IntroductionTH E SO-CALLED ENTHALPY METHODS are a common
choice in the numerical solutionof moving phase-change problems
(Stefan problems). An impo rtant reason for this isthe fact that
the continuously moving phase front does not have to be tracked
over adiscrete numerical grid. Investigations have shown, however
(Bonacina, Comini,Fasano & Primicerio, 1973; Voller, Cross
& Walton, 1979), that the accuracy ofenthalpy solutions is
influenced by the position of the phase front Stemming fromthese
investigations methods have been developed which overcome the
problems ofinaccuracy (Voller & Cross, 1981, 1983a, b; Voller,
1983). Another problem withenthalpy solutions arises when an
implicit finite difference discretization is used.Such an approach
results in a set of non-linear equations to be solved at each
timestep. Not only are these equations relatively difficult to
solve (especially incomparison with explicit enthalpy methods) but
they are also computationallydemanding. A number of schemes for
solution of implicit finite difference enthalpymethods have been
proposed (Meyer, 1973; Shamsundar & Sparrow, 1975;Longworth,
1975; Furzeland, 1980, White, 1983). The aim of the current work is
toinvestigate these methods using simple one and two dimensional
Stefan p roblems. Inaddition an alternative implicit scheme will be
developed and tested against theexisting schemes.2. Test
Problems
The enthalpy H is defined as the sum of sensible and latent
heats. The standardformulation for a m ultidimensional
melting/freezing phase change problem takes the201.
0272-4929/85/0202 01 + 14J03.0 0/0 _ _ .1985 Academic Pros Inc.
(London) Limited.
-
8/23/2019 Voller
2/14
2 0 2 V. R. VOLLER
formp ^ = V.(K(VT )), (1)where T is temperature, K conductivity
and p density. The enthalpy andtemperature may be related via{ H/C,
-Cs>H,
e(H - L/2)/(Ce+L/2\ -Ce^H^Ce + L, (2a)(H-L)/C, H>C e + L,
or alternatively byCT, - e > 7 \
-eTe, (2b)T>e,where C is the specific heat, L is the latent
heat of the phase change and e > 0 is atemperature half range
over which the phase change occurs. Note that equations(2a) and
(2b) have been derived assuming that the phase change occurs
abouttemperature Tm = 0 and that the thermal conditions are
constant throughoutTwo test problems are introduced: (1) a
one-dimensional problem of freezing inthe semi-infinite half space
with fixed surface temperature T < 0 at the surfacex = 0; (2) a
two-dimensional problem of freezing in a square duct (side 1 m)
withfixed surface tempera ture T < 0. The thermal, boundary and
initial conditions forthese problems are given in Table 1. It may
be noted that in both these problems thethermal conditions (i.e.
conductivity etc.) are constant throughout By suitablemodification
of the discretization equations [see equation (4a)], all the
methodsexamined in this paper can be applied to problems with
varying thermal conditions.Such considerations in the current work,
however, were thought to introduceunnecessary complications.3.
Solution Methods
On discretizing the area of interest and using Taylor Series
approximations(Smith, 1965) or "control volume" conservation
(Patankar, 1980) the followingTABLE 1
Con ditions for test problem s (S I un its)
KCLTm^Inittal5x
One dimension22-5 x 10 610 '0- 1 020-125
Two dimensions22-5 x 106100- 1 020-1 (=
-
8/23/2019 Voller
3/14
ENTHALPY FORMULATION OF STEFAN PROBLEMS 2 0 3
weightedfinite-differencereplacement for equation (1) may be
derived.H ' + 1 = H J+(5(1 9)F(T*) + 8t 0F(T'+1 ) (3)where
H* = (tf5,fl2l# $ , . . # ; ) and 1* = (7* 7 } , . . , 1* )are
vectors of nodal enthalpies and temperatures respectively at time t
= k 5t. Th eparameter 9 is a weighting factor and can take values
between 0 and 1. The vectorfunction F results from the space
discretization of the right hand side of equation (1).The form that
F takes depends on the geometry and conditions of the problem
inquestion. For a one-dimensional problem with constant thermal
properties an ithcomponent of F is
_ Kp 5x 2 ~1
If there is a step change in the conductivity at the phase
change interface thenequation (4) is modified asL 7 3 ] . (4a)
whereK K K if T T1 "-2 -^liquid U li > J rIn a two
dimensional problem in a square region nh x nh covered with a
squaremesh of side h, with node numbering from bottom left to top
right, an ithcomponent of F is _ KNote that both (4) and (5) give
components of F at internal nodes. For nodes on oradjacent to
boundaries the form of a component of F will need modification.The
relationship between the respective nodal enthalpies and
temperature inequation (3) is given by equation (2). Since the
three possible forms of thisrelationship are not known a priori, in
cases when B > 0 (i.e. implicit solutions),equation (3) becomes
a non-linear set of equations. A common approach to solvingsuch
equations is to use a modified Gauss-Seidel iterative scheme as
suggested byOrtega & Rheinbolt (1970). Meyer (1973) uses
equation (2b) writing (3) in terms of T
If at time t = j 5t the vector of nodal temperatures T1 is known
the correspondingvector at time t = (j+l) 5t, i.e. T ; + 1 may be
calculated from (6). The components ofan initial estimate TJ0+i are
calculated fromtF{], (7)
-
8/23/2019 Voller
4/14
2 0 4 V. R. VOLLERi.e. the explicit scheme (6 = 0) is used to
approximate H J + 1 and the initial estimatefor T J + 1 follows
from equation (2a). The initial estimate for TJ+ 1 is improved
uponvia the Gauss-Seidel iteration in which the k+ lth estimate is
given by
where f 0, -e>Thl-L, Tt>erc+xe, -e>T,,
R*m = e
an dThe value of the parameter X and the form of the vector
function G depends on theproblem geometry and conditions. In a
one-dimensional problem with F defined byequation (4)
(9)For a two-dimensional problem with F defined by equation
(5)
a n d GT) = -^iJi_l + T i-n + T i+a +T i+ l). (10)In all cases
the most current iterative values of temperature are used to
calculate
Equation (8) is applied until a convergence criterion is
satisfied with the values ofa* and p* calculated at the beginning
of each iteration. On convergence theprocedure is repeated to find
T1+ 1 and so on.The major drawback in using equation (2b) is that
as e -> 0 the iterative schemedefined by equation (8) will not
converge due to the rapid change in H(T\ reducingto a jump
discontinuity when = 0, near T = 0. In practice as E becomes small
thevalue of a,* associated with the node which is centred on the
control volumeunderg oing th e phase cha nge, jum ps between values
close to 0 and L in successiveiterations making the convergence of
equation (8) impossible.One way of overcoming the above problem is
to use equation (2a) and writeequation (3) in terms of the enthalpy
H. This step will involve employing thefunction (H). This function
is piecewise continuous for all values of e (in particular = 0). In
this m anner equation (3) becomes
X (11)where
-
8/23/2019 Voller
5/14
ENTHALPY FORMULATION OF STEFAN PROBLEMS 2 0 5
Shamsundar & Sparrow (1975) have solved equation (11) via a
Gauss-Seidel-typeiterative scheme, a method that has been
numerically investigated by White(1983a, b ) . With known nodal
enthalpies H J at time t = j 5t initial approximationsare obtained
from the explicit scheme,
(12)These initial approximations are improved upon via the
Gauss-Seidel iterationsdefined by
where F and G are now functions of O and0, -C
X8EL
, H,>Ce + L ,1 -C >HC' ^
XBThe value of X an d X form of G , are defined above, equations
(9) and (10), for simpleo n e - and two-dimensional examples.An
alternative way of solving equation (11) is to use a Newton method.
Such amethod has been presented by L ongw orth (1975). With the
noda l enthalpy fieldknown at time t = j dt an initial
approximation for the nodal enthalpies at timet = (J+l)5t is made
via equation (12). This is improved upon by a sequence
ofcorrections
H t t i = H + 1 + t C., (14)where the ith component of Cm is
C C ( ] - " l -and
In the three methods outlined above, for solving the implicit
discretization of theenthalpy method, the form of the iterative
scheme, equations (8), (13) and (15), at
-
8/23/2019 Voller
6/14
2 0 6 V. R. VOLLER
each time step depend on the nodal temperature or enthalpy field
at that time step.Since only approximations exist (viz. equations
(7) and (12)) for these values at thestart of an iterative loop the
form of the scheme may be expected to change duringthe iterations.
This makes it necessary to check the nodal enthalpy or
temperaturefields at the end of each iterative sweep and modify the
vectors a* and P* or at, j) orJm as appropriate. This restriction
introduces an element of inefficiency into thevarious schemes.An
approach proposed by Furzeland and Elliott (see Furzeland, 1980)
results inan iterative scheme which does not require a detailed
check of the solution fields.The enthalpyfinite-differencc-scheme
equation (3) is written as
H{+1+WT+1 =b, (17)where
bi = H{+5t(l-0)F{+5t6Gl+i. (18)Equation (17) may be written in a
point iterative form. If at each node point i, whencalculating
thefcth terative values, bt is considered to be a constan t (i.e.
independentof [7IK +1 ) a Newton linearization leads to an "inner"
iterative scheme for [73^ + 1which on dropping the k subscript
is
b ' [ ^ ^ ^ [ 7 J i + 1 , (19)
where the subscript p indicates the position of the inner
iteration.The Furzeland/Elliott iterative scheme may be implemented
as follows. Initialestimates [T] + 1 are generated from equation
(7). During the k + lth iteration ateach node point in turn bt is
calculated using the most current available values.From equations
(2) if-e(C + X6)
-
8/23/2019 Voller
7/14
ENTHALPY FORMULATION OF STEFAN PROBLEMS 2 0 7
4. A New Implicit Solution MethodThe aim of this section is to
present a new implicit solution method. Like theFurzeland/Elliott
scheme the form of the iterative equations derived are
independentof the nodal solution fields. In addition the method
performs efficiently in its rawstate without the need of additional
enhancements.The basic principle in the new implicit enthalpy
method is to separate out thelatent and sensible heat components.
First equation (1) is written as
! ( C r + A#) V.(KVT), (20)orwhere on assuming the relationship
between enthalpy and temperature as given byequation (2b)CO , - e ^
T,
AH = eis the latent heat component of the enthalpy. On
re-arrangement equation(20) becomes
pC = V.(KVT) + S (22)atwhere S is a latent heat source given
by
The essential feature of equation (22) is that the latent heat
contribution has beenincluded into the formulation via a source
term. On seeking an implicit finite-difference solution this fact
ensures that the non-linearity associated with the latentheat may
be isolated and dealt with efficiently. On defining AH to be the
vector ofnodal la tent heats given by equatio n (21) a g eneral
finite-d ifferen ce scheme forequation (22) isCT> +1 = CT i +
5t(l-ff)F(J') + 5teF(T J+ 1) + S'+\ (24)
where
The vector S in equation (24) can be regarded as a vector of
heat sources, eachcomponent representing the change in the latent
heat content of the control volumessurrounding the nodes. The
physical significance of S can be understood onconsidering a
freezing problem. In a freezing problem over each time step there
is anet heat loss from each control volume. For the control volumes
in the (/+ l)th timeinterval (i.e. \J 5t, (j+1) +1 =
5t(l-ff)F(TJ)+5t8F(JJ+ l). (25)
-
8/23/2019 Voller
8/14
2 0 8 v- R- VOLLERIn control volumes in which no phase change
occurs in the (j+ l)th time interval allthe heat loss is accounted
for by a change in the sensible heat (i.e. CT). If a phasechange
occurs within a control volume in the time interval then only a
fraction ofthe heat loss is accounted for by a change in the
sensible heat The remainder of theheat loss is accounted for by a
latent heat change. The value of Sj*1 will give thislatent heat
change in the ith control volume. Hence in each control volume
duringthe (J+ l)th time interval the latent heat loss can be
calculated as
_r0; " > eS{ - | _ 4 + l ; otherwise (26)where the
condition
T/ eimplies that no phase change occurs in the ith control value
during the (J+ l)th timeinterval. The value of A{+1 in equation
(26) will depend on the fraction of the timeinterval in question
over which the phase change occurs in the ith control volume.There
are three possibilities. The phase change in control volume i (1)
commences ata point in the time interval, (2) occurs over the
entire interval or (3) is completed at apoint in the time interval.
With these possibilities in mind A{+1 can be calculated as
- i ? [ e i + 1 - C ( ^ - ) ] , T/>e,RQ{+\ (27)
The value R represents the fraction of heat loss accounted for
by the latent heatchange during the phase change. If the
temperature enthalpy relationship is of theform given in equation
(2) then
For a melting problem similar equations may be employed for
calculating S{+1 withappropriate sign changes in the conditions.An
efficient solution methodology for equation (24) is as follows. In
each time stepa. Gauss-Seidel iteration is defined as
(28)
where F and G are functions of T as defined above and
If the ith control volume is identified as changing state (i.e.
0 < [Aff j j(+ 1 < L) thenthe nodal temperature is set as
via equation (2). On the completion of each iterative sweep the
values of [S])(ti and
-
8/23/2019 Voller
9/14
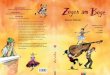
ENTHALPY FORMULATION OF STEFAN PROBLEMS 209Initial values T +
'Generated from explicitscheme equation (30)
Initial values S + 'Generated from equation (26)
fcth estimate [TJi+ 'Generated from equation (28)
kth estimate [S]i + IGenerated from equation (26)
Convergence check
If convergence go tonext time stepFIG. 1. Major steps in
solution over one time itep.
hence [A tfJ^ +i are updated via a su itable iterative form of
equation (26). Thisprocedure is continued to convergence.To
initialize the procedure on each new time step, values [T]o +1 a r
e generated viathe use of a fully explicit scheme with S^ + * set t
o zero, i.e.(30)
(31)In the control volumes where [SJ 0 + 1 ^ 0 0 e - t n e
control volumes changing phase)
Initial values [S yo+ i are then estimated via equation (26)
with
-
8/23/2019 Voller
10/14
2 1 0 v - R- VOLLERthe initial estimates for temperature are
modified as
. (32)Figure 1 is a flowsheet which illustrates the major steps
in the solution for one timestep.5. Comparison of Methods
In comparing the techniques outlined in this paper for
computational efficiencycare has to be taken that none of the
methods is biased by the chosenimplementation. To safeguard against
this, where possible, the basic structure of thesoftware for each
technique was similar. In addition the convergence criterion,
(33,
where y is a prescribed tolerance, was used in all
techniques.The performance of all the techniques presented in the
paper may be enhanced byrelaxation techniques. The major aim of the
current work, however, is to test therelative performance of the
available techniques in their basic form. Hence in thecomparison
runs relaxation was not employedIn comparing the results four
methods will be examined. The method based onequation (13) will be
called "White", the method based on equation (15) will bereferred
to as "Longworth", the method based on equation (19) will be
referred to as"Furzeland" and the method described by equations
((26) and (28)) will be referredto as "New". Each of these methods
was applied in a "Crank-Nicolson" mode, i.e.9 was fixed at i. In
all five runs were carried out on both the one- and two-dimensional
test problems. The specifications for each of these runs are
recorded inTable 2.Table 3 shows numerically predicted nodal
enthalpies at x = 05 m in dayintervals up to 12 days for Run 1.
These results are typical of all runs in thatpredictions from each
of the methods are in agreement up to the third decimal place.In
fact, the Furzeland, White and New methods are in agreement up to
the fifthdecimal place. In addition the number of iterations per
time step required in theFurzeland, White and New methods were
identical at all time steps in all runs.These results clearly
indicate that each of the above methods is solving the samediscrete
problem.
TABLE 2Specification of runs
Run no12345
DimensionsOn eOn eOn eOn eTw o
5t (hours)4124124
Range e000-50-50
Convergence y10"210"2l O ' 210"210"*
-
8/23/2019 Voller
11/14
ENTHALPY FORMULATION OF STEFAN PROBLEMS 211In presenting results
associated with the efficiency of the methods the Whitemethod is
chosen as a benchmark for CPU comparisons. In this way the CPU
requirement for the White method is given the value 1 in each
run with the CPUrequirements of the other methods normalized
appropriately.Table 4 shows a run-by-run comparison for the CPU
usage on a Dec PDP 11/34for each method to reach the termination
point (i.e. 12 days in the one-dimensionalproblem, complete phase
change in the two-dimensional problem). The majorconclusion that
may be drawn from these results is that the New method onlyrequires
between 049 and 0-81 the CPU time of the next best method.In
addition to the above conclusion the following points are made.(1)
Introduction of a mushy zone range e favours the new method.(2) The
improvement in CPU usage for the new method when applied to a
two-dimensional problem is not as marked. This is due to the fact
that inmultidimensional problems m ore than one control volume is
changing state atthe same time. Hence the procedure for updating
the latent heat source termhas to be used more than once in each
iterative sweep. This fact suggests thatin complex problems in
which many control volumes are changing state
TABLE 3Enthalpy Predictions at x = 0-5 m, Ru n 1
Time (days)123456789101112
Run no12345
Longworth103 5 x 10102110171O091O0710060-9210-6850-4350182- 0 O
3 0- 0 O 4 7
White11111
White1035 x 10910221017100910071O060922068704370184- 0 O 3 3- 0
0 4 7
TABLE 4CPU usage
Relative CPUFurzeland
07260728076207830738
Furzeland1035 x 1010221017100910071O060922068704370184- O 0 3 3-
O 0 4 7
requirementNew05380521042303860606
New1035 x 109102210171O091O071O060922068704370184- 0 0 3 3- 0 0
4 7
Longworth1-3401-7541-3481-760No run
-
8/23/2019 Voller
12/14
2 1 2 v - R- VOLLERsimultaneously the CPU usage of the White or
Furzeland and New methodsmight be compatable.
(3) The programming requirements for the Furzeland method are
less, e.g. in onedimension the F urzeland method required abou t 60
lines and the new methodabout 80 lines.(4) As noted above, SOR
techniques may enhance the results given in Table 4.Investigations
suggest that due to the small number of iterations per time step(on
average 23) in the one dimensional runs, SOR would have no
noticeablebenefit. In two dimensions, employing the simple SOR
strategy of a globalvalue of 2 > a> > 1 for control
volumes not changing state and a value ofco = 1 for regions which
are changing state (Elliott, 1981), does reduce theiterations. The
additional complexity in the programming, however, offsetsany
improvement in efficiency. If SOR is to improve the efficiency then
itappears that sophisticated methods for choice of an optimum co
will need tobe developed. One such candidate, proposed by Elliott
(as reported inFurzeland, 1980) is where co is varied automatically
according to the relativesizes of the two-phase regions.
6. ConclusionsThe aim of this paper has been to investigate and
develop implicit numericalsolution methods for the enthalpy
formulation of phase change problems. Theapproach adopted has been
pragmatic in nature and the major interest has been inthe
development of an implicit enthalpy method which is computationally
moregeneral and efficient than existing methods. A rigorous
analysis of the numericaltechniques presented is left to another
time.The basic principle in the development of the new implicit
method is theseparation of sensible and latent heat terms in a
discretized enthalpy formulation,thereby introducing a latent heat
source in the equations which acts as alinearization term in
subsequent iterative solutions. This represents an advantageover
previous schemes in that the form of the iterative scheme does not
depend onthe iterated values. In addition, only one variable (i.e.
temperature) is explicitlysolved for at each time step. In
application to simple one- and two-dimensionalsolidification test
problems the New method is 20-50% faster than
previousmethods.Having an efficient means of solving the enthalpy
formulation does not create a"magical" means of solving all
phase-change problems. The inherent drawbacksfound in use of the
enthalpy method, Voller et al. (1979), Bonacina et al. (1973),
willstill make themselves noticed. Hence there is still a need for
remedial schemes suchas those proposed by Voller & Cross (1981,
1983a, b) . With an efficient implicitenthalpy solution, however,
such schemes may be applied more effectively (Voller &Cross,
1983b).Application of the methods developed in this work to more
complex problems,e.g. geometric complex regions or variations in
thermal properties, although"messy", should be possible. The reason
for this is that the development of themethod is compatible with
the control volume conservation numerical technique
-
8/23/2019 Voller
13/14
ENTHALPY FORMULATION OF STEFAN PROBLEMS 213
(Patanker, 1980; Schneider, Strong & Yaranovich, 1975). This
approach in thedevelopment of a numerical scheme copes well with
such situations. Essentially allthat is required is the correct
formulation of the discrete equations describing heatflow in and
out of control volume [e.g. Equation (4a)].
Enthalpy methods have proved a useful means of solving
relatively simple phase-change problems. Current interest, however,
is directed towards applications ofenthalpy formulations in more
complex problems, e.g. convective/conduction phasechange (Morgan,
1981; Gartling, 1980). To move into such areas, accurate,
efficient,flexible and robust enthalpy schemes are required. The
enthalpy scheme presented inthis paper, it is hoped, goes some way
towards meeting these requirements.The author would like to thank
Dr C. M. Elliott of Imperial College, London, DrM. Cross of Thames
Polytechnic and the referees of the IMA Journal of
NumericalAnalysis for many helpful comments.
REFERENCESBONACINA, C, COMINI, G., FASANO, A. & PRIMICERIO,
M. 1973 Numerical solutions of phasechange problems. Int. J. Heat
Mass Transfer 16, 1825-1832.ELLIOTT, C. M. 1981. On
thefiniteelement approximation of an elliptic variational
inequalityarising from an implicit time discretization of the
Stefan problem. IMA J. num. Analysis1, 115-125.FURZELAND, R. M.
1980 A comparative study of numerical methods for moving
boundaryproblems. / . Inst. Maths Applies 26, 411-429.GARTLING, D.
K. 1980 Finite element analysis of convective heat transfer
problems withchange of phase. In Computer Methods in Fluids
(Morgan, K., Taylor, C. & Brebbia,C. A., Eds). London:
Pentech.LONGWORTH, D. 1975 A numerical m ethod to determine the
temperature distribution around'a Moving Weld Pool. In Moving
Boundary Problems in Heat Flow and Diffusion(Ockendon, J. R. &
Hodgkins, W. R., Eds). Oxford: OU P.MEYER, G. H. 1973
Multi-dimensional Stefan problem s. SIAM J. num. Analysis 10,
522-538.MORGAN, K. 1981 Numerical analysis of freezing and melting
with convection. Comput.
Meth. app. Mech. Engng 28, 275-284.ORTEGA, J. & RHEINBOLT,
W. 1970 Iterative Solutions of Non-linear Equations in
SeveralVariables. New York: Academic Press.PATANKAR, S. V. 1980
Numerical Heat Transfer an d Fluid Flow. New York:
Hemisphere.SCHNEIDER, G. E., STRONG, A. B. & YARANOVICH, M. M.
1975 A physical approach to thefinite difference solution of the
conduction equation in orthogonal curvilinear co-ordinates. ASME
Annual Meeting, Houston, Texas, 1975. New York:
ASMEpublications.SHAMSUNDAR, N. & SPARROW, E. M. 1975 Analysis
of multi-dimensional conduction phasechange via the enthalpy model.
J. Heat Transfer ASME 97, 33-340.VOLLER, V. R. 1983 Interpretation
of the enthalpy in a discretized multi-dimensional re
gionundergoing a phase change. Int. Commun. Heat Mass Transfer 10,
323-328.VOLLER, V. R. & GROSS, M. 1981 Accurate solutions of
moving boundary problems using theenthalpy method. Int. J. Heat
Mass Transfer 24, 545-556.VOLLER, V. R. & CROSS, M. 1983a An
explicit numerical mediod to track a moving phasechange front. Int.
J. Heat Mass Transfer 26, 147-150.VOLLER, V. R. & CROSS, M.
19836 Use of the enthalpy method in the solution of Stefanproblems.
In Numerical Methods in Thermal Problems, Vol. 3 (Lewis, R. W.,
Johnson,J. A. &Smith, W. R., Eds). Swansea: Pineridge
Press.VOLLER, V. R., CROSS, M. & WALTON, P. 1979 Assessment of
the weak solution technique forsolving Stefan problems. In
Numerical Methods in Thermal Problems (Lewis, R. W. &Morgan,
K., Eds). Swansea: Pineridge Press.
-
8/23/2019 Voller
14/14
21 4 v - R- VOLLERWHITE, R. E. 1982a An enthalpy formulation of
the Stefan Problem. SIAM J. num. Analysis19, 1129-1157.WHITE, R. E.
1982* A numerical solution of the enthalpy formulation of the
Stefan Problem.SIAM J. num. Analysis 19, 1158-1172.