Embed Size (px)
Citation preview
Maszyny i roboty pomiarowe
Część II
Układy pomiarowe
Głowice (sondy) pomiarowe
Prof.Eugeniusz Ratajczyk
24 sierpnia 2016 ER
CMM
Współrzędnościowe Maszyny Pomiarowe
1. Istota pomiarów współrzędnościowych 2. Główne zespoły maszyn i ich funkcje
3. Rodzaje konstrukcji maszyn Układy pomiarowe
Głowice (sondy) pomiarowe
ER CMM
Roboty i centra pomiarowe
Część I
Część II
Część IV.
Część V. Ramiona pomiarowe
Część VI. Skaning pasywny, skaning aktywny
24 sierpnia 2016
Część III. Oprogramowania
Układy pomiarowe
Rodzaje układów pomiarowych:
inkrementalne kodowe interferencyjne
tarczowe – odmierzają wartości kąta
liniowe – odmierzają wartości długości
ER CMM 24 sierpnia 2016
Inkrementalne układy pomiarowe
Rodzaje:
optoelektroniczne wzorzec w postaci liniału z ciemnymi i jasnymi polami ułożonymi na przemian, o okresie (stałej wzorca) w przedziale 10÷100 μm (niepewność 2-3 μm/1 m przy rozdzielczości 1 μm)
induktosynowe wykorzystują zjawisko indukcji magnetycznej, powstające pomiędzy uzwojeniami suwaka i liniału w postaci meandrów o okresie 2÷4 μm (niepewność 3-5 μm/1 m)
pojemnościowe podstawowym elementem pomiarowym jest kondensator różnicowy
ER CMM
Optoelektroniczne układy pomiarowe
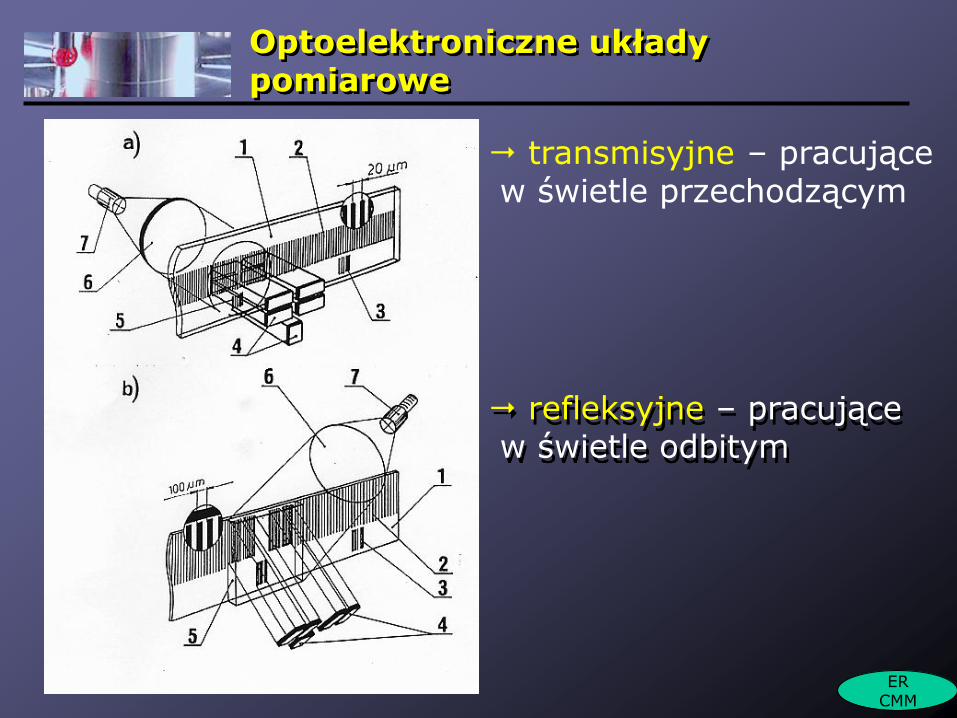
refleksyjne – pracujące w świetle odbitym
transmisyjne – pracujące w świetle przechodzącym
ER CMM
Optoelektroniczne układy pomiarowe
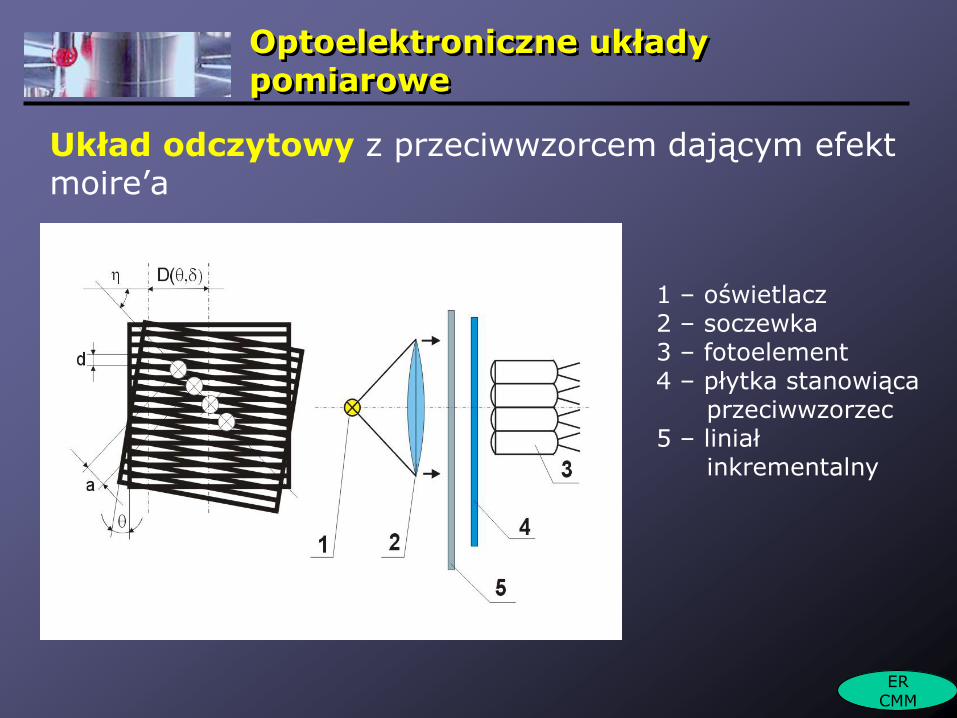
Układ odczytowy z przeciwwzorcem dającym efekt moire’a
1 – oświetlacz 2 – soczewka 3 – fotoelement 4 – płytka stanowiąca
przeciwwzorzec 5 – liniał
inkrementalny
ER CMM
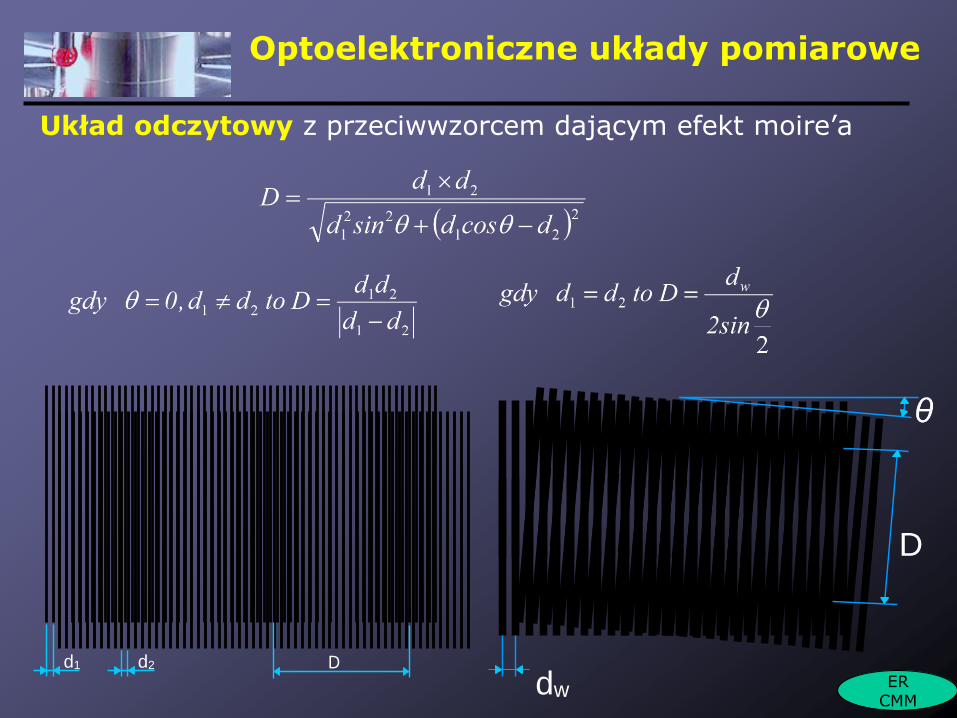
d1 Dd2
dw
D
Optoelektroniczne układy pomiarowe
Układ odczytowy z przeciwwzorcem dającym efekt moire’a
ER CMM
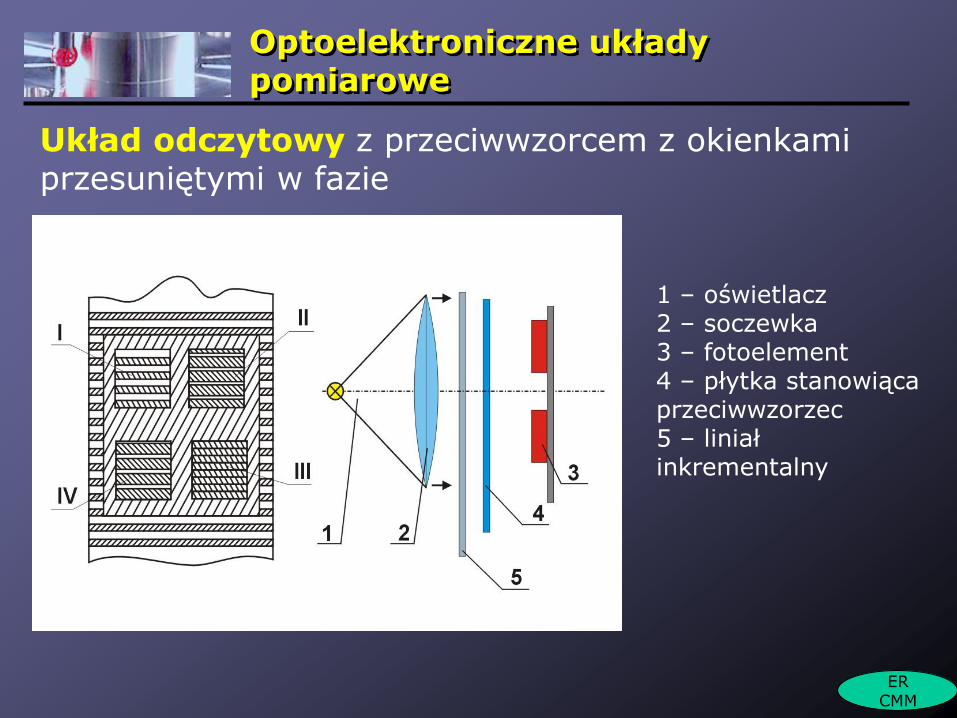
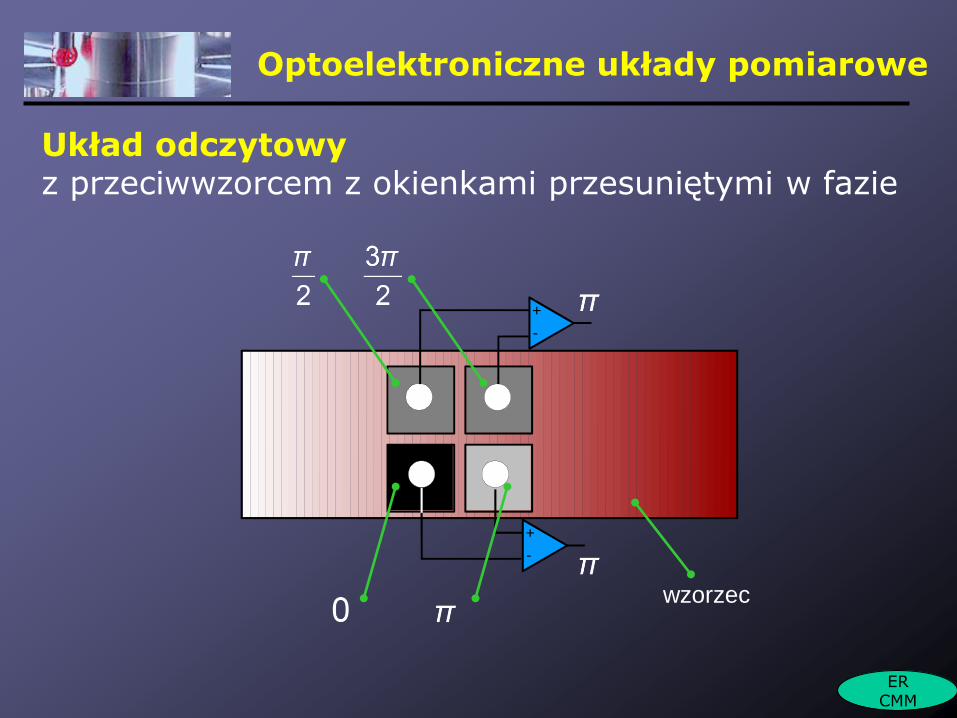
Optoelektroniczne układy pomiarowe
Układ odczytowy z przeciwwzorcem z okienkami przesuniętymi w fazie
1 – oświetlacz 2 – soczewka 3 – fotoelement 4 – płytka stanowiąca przeciwwzorzec 5 – liniał inkrementalny
ER CMM
+
-
+
-
wzorzec
Układ odczytowy z przeciwwzorcem z okienkami przesuniętymi w fazie
Optoelektroniczne układy pomiarowe
ER CMM
ER CMM
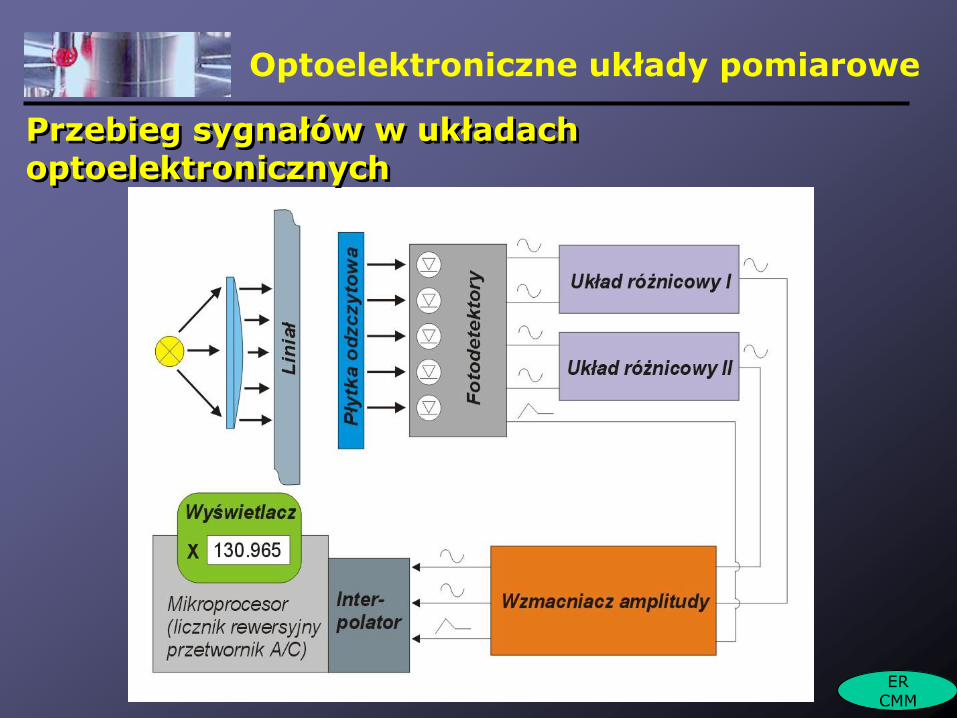
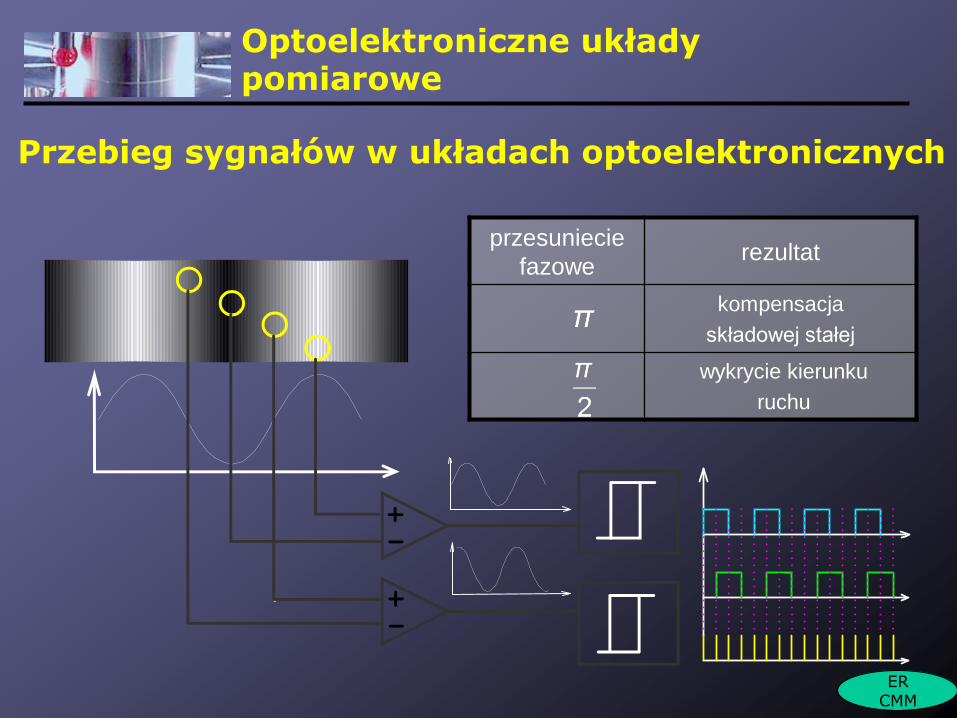
Przebieg sygnałów w układach optoelektronicznych
Optoelektroniczne układy pomiarowe
Optoelektroniczne układy pomiarowe
Przebieg sygnałów w układach optoelektronicznych
przesuniecie
fazowe rezultat
kompensacja
składowej stałej
wykrycie kierunku
ruchu
ER CMM
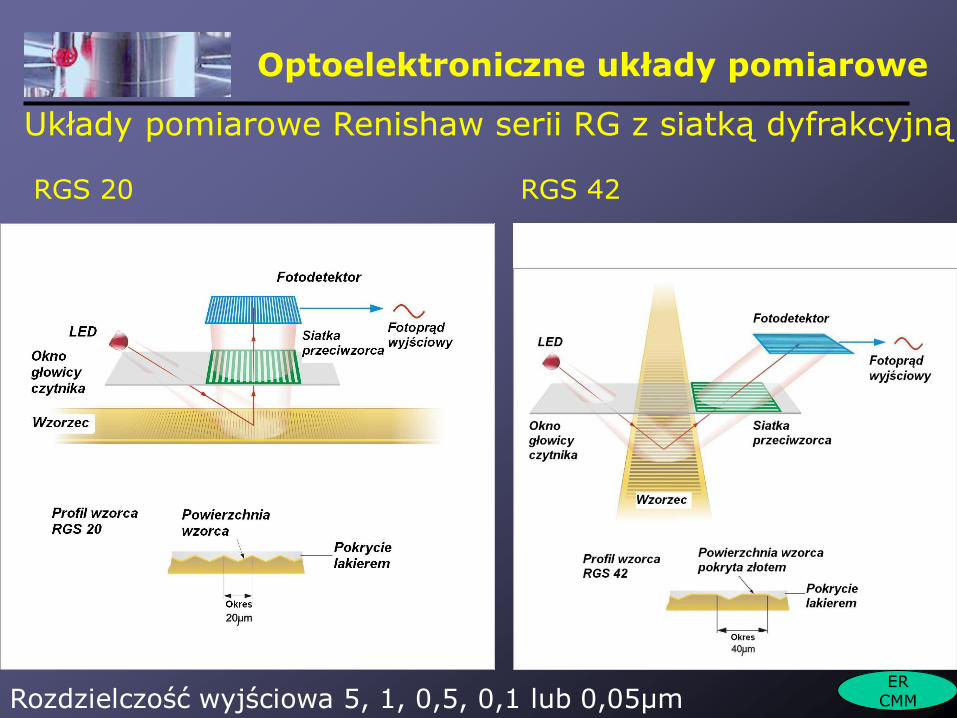
Optoelektroniczne układy pomiarowe
Układy pomiarowe Renishaw serii RG z siatką dyfrakcyjną
RGS 20 RGS 42
Rozdzielczość wyjściowa 5, 1, 0,5, 0,1 lub 0,05µm ER
CMM
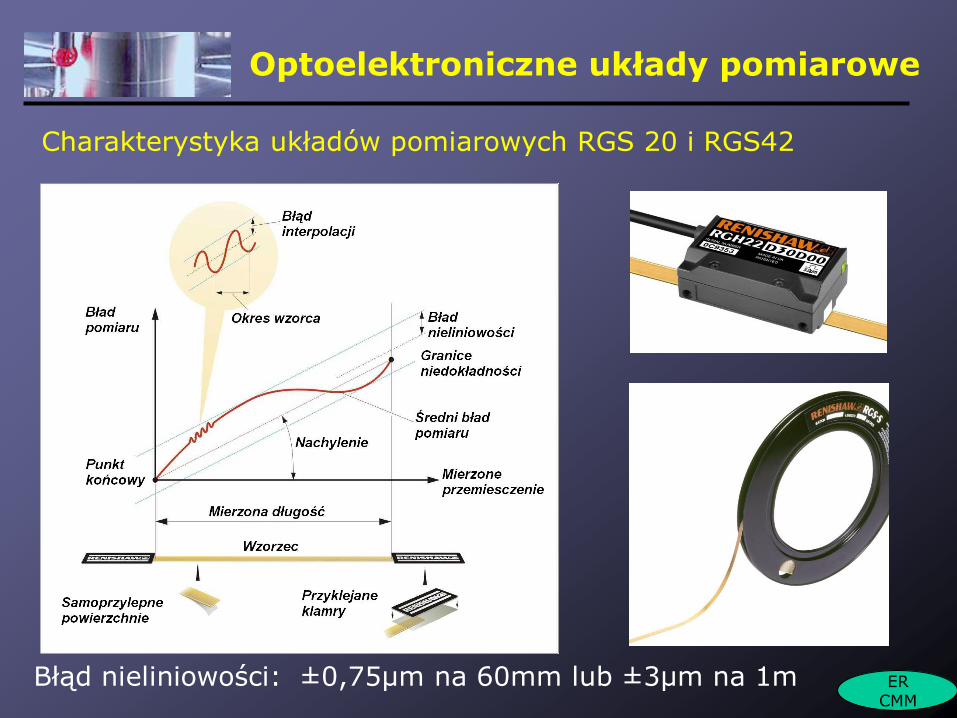
Optoelektroniczne układy pomiarowe
Charakterystyka układów pomiarowych RGS 20 i RGS42
Błąd nieliniowości: ±0,75µm na 60mm lub ±3µm na 1m ER CMM
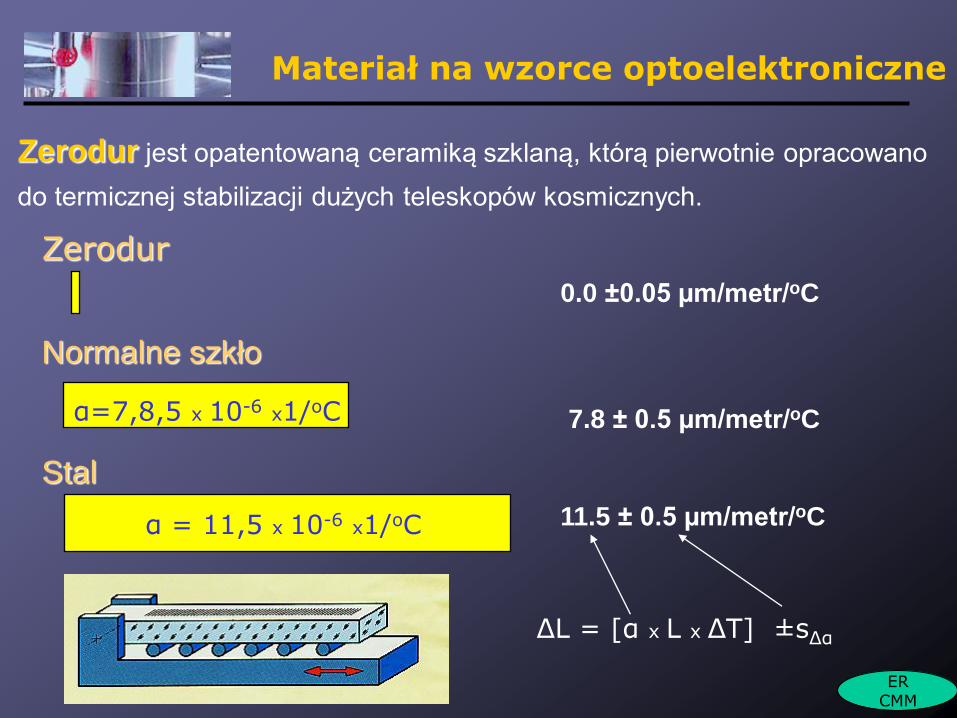
Zerodur jest opatentowaną ceramiką szklaną, którą pierwotnie opracowano
do termicznej stabilizacji dużych teleskopów kosmicznych.
Normalne szkło
Stal
7.8 ± 0.5 µm/metr/oC
Zerodur
Materiał na wzorce optoelektroniczne
ER CMM
α=7,8,5 x 10-6 x1/oC
0.0 ±0.05 µm/metr/oC
11.5 ± 0.5 µm/metr/oC
ΔL = [α x L x ΔT] ±sΔα
α = 11,5 x 10-6 x1/oC
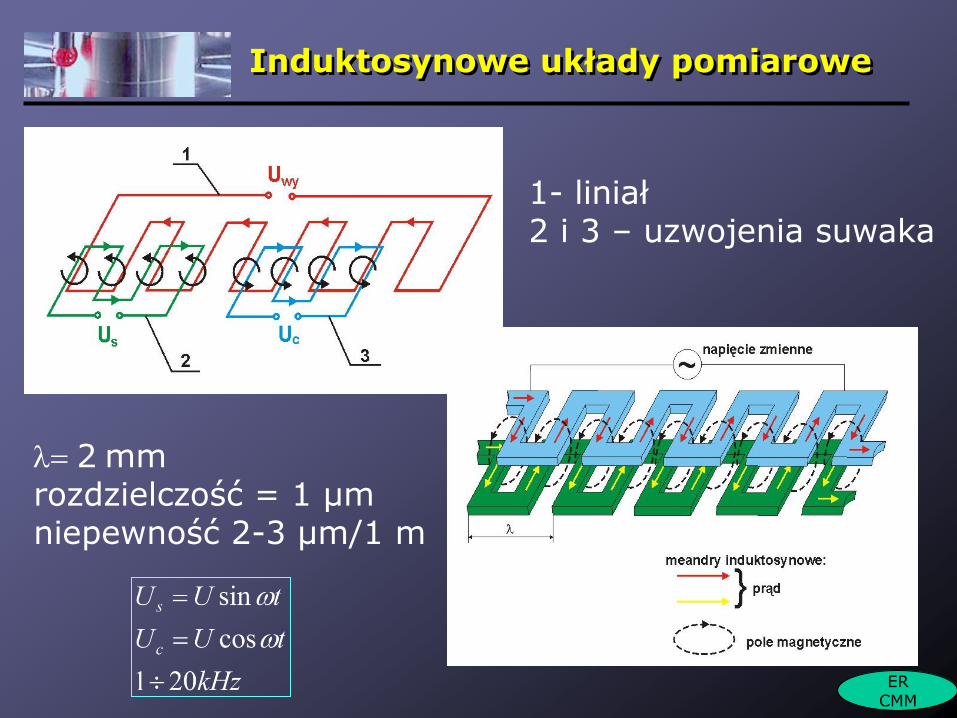
Induktosynowe układy pomiarowe
1- liniał 2 i 3 – uzwojenia suwaka
= 2 mm rozdzielczość = 1 μm niepewność 2-3 μm/1 m
ER CMM
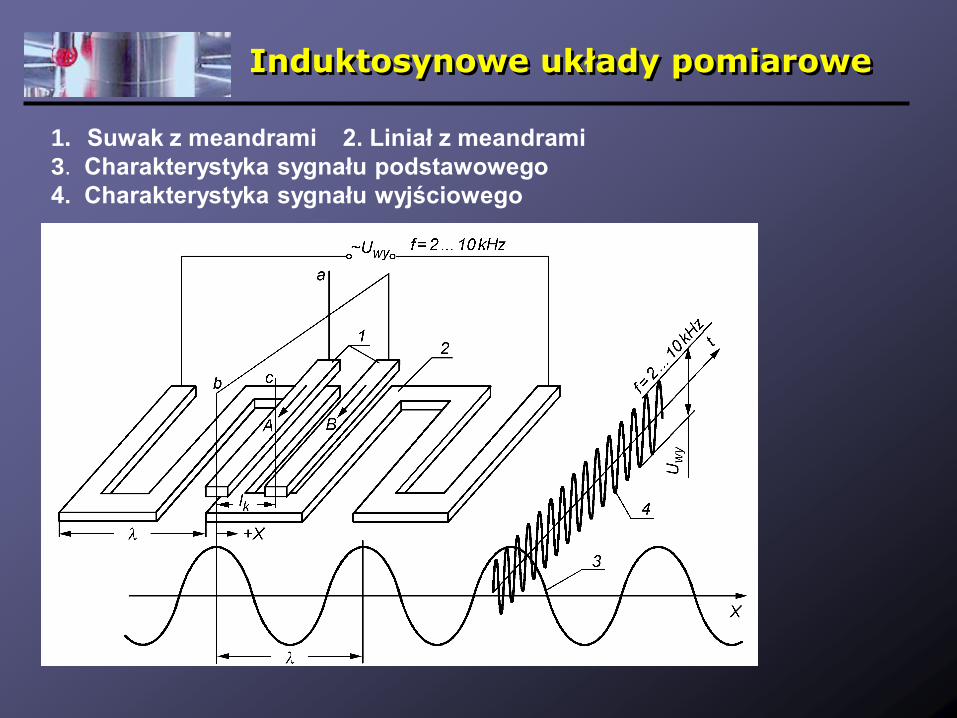
Induktosynowe układy pomiarowe
1. Suwak z meandrami 2. Liniał z meandrami
3. Charakterystyka sygnału podstawowego
4. Charakterystyka sygnału wyjściowego
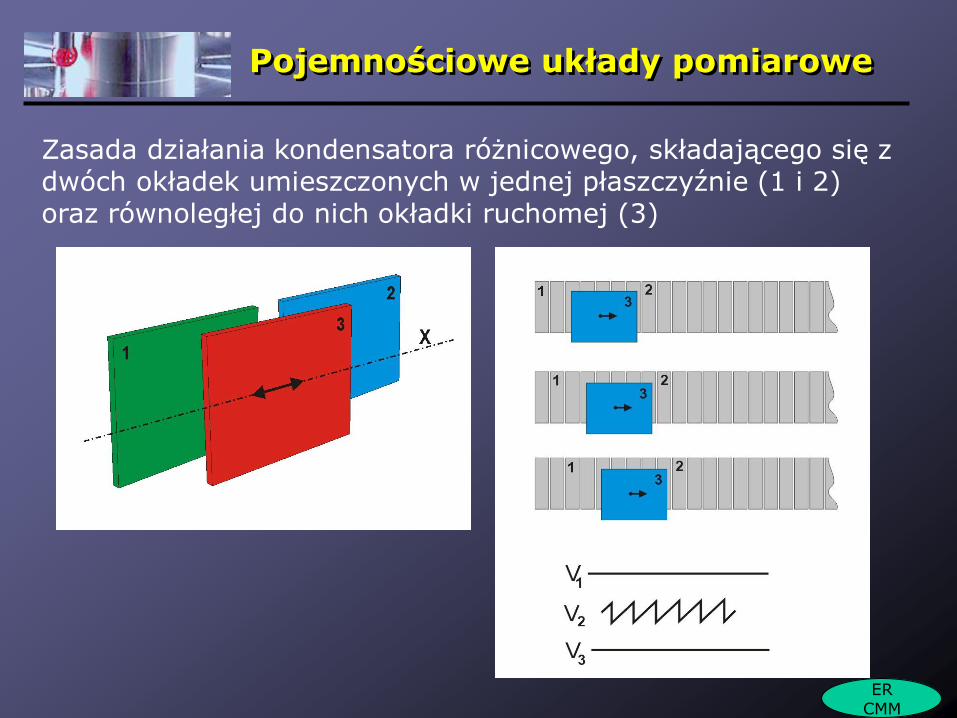
Pojemnościowe układy pomiarowe
Zasada działania kondensatora różnicowego, składającego się z dwóch okładek umieszczonych w jednej płaszczyźnie (1 i 2) oraz równoległej do nich okładki ruchomej (3)
ER CMM
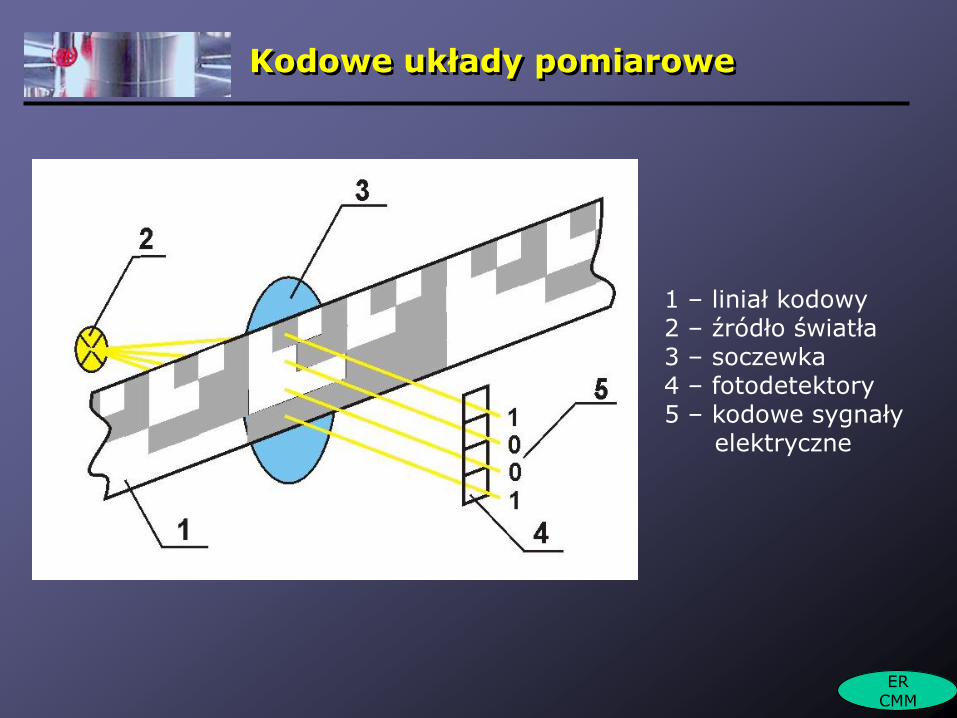
Kodowe układy pomiarowe
1 – liniał kodowy 2 – źródło światła 3 – soczewka 4 – fotodetektory 5 – kodowe sygnały
elektryczne
ER CMM

Rodzaje kodów
ER CMM
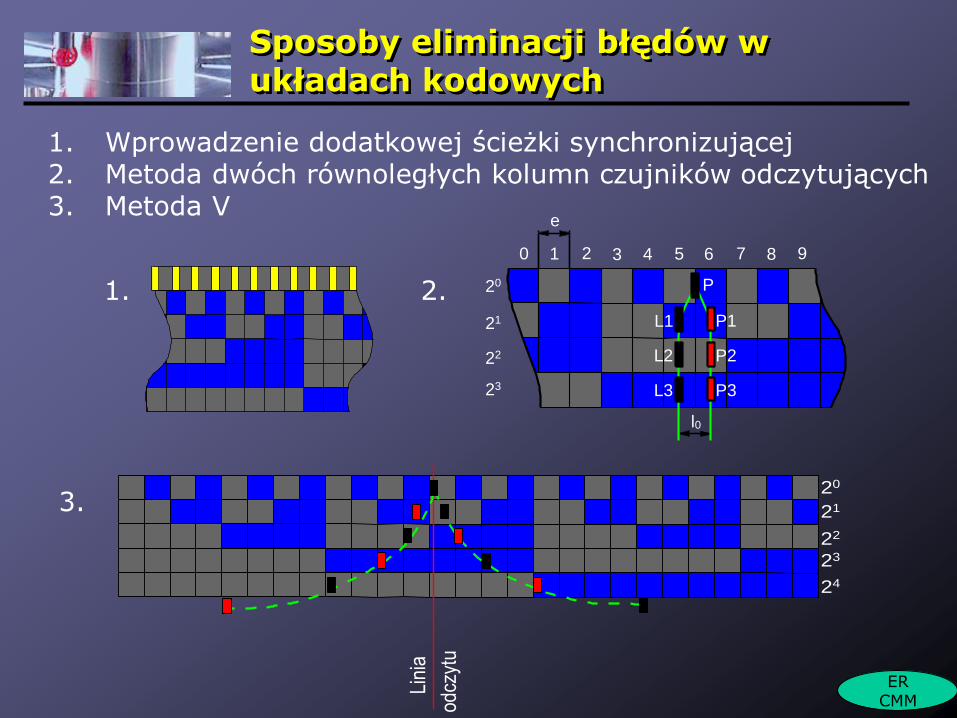
Sposoby eliminacji błędów w układach kodowych
1. Wprowadzenie dodatkowej ścieżki synchronizującej 2. Metoda dwóch równoległych kolumn czujników odczytujących 3. Metoda V
ER CMM
P
P1
P2
P3
L1
L2
L3
l0
0 1 2 3 4 5 6 7 8 9
20
21
22
23
e
20
21
22
23
24
1. 2.
3.
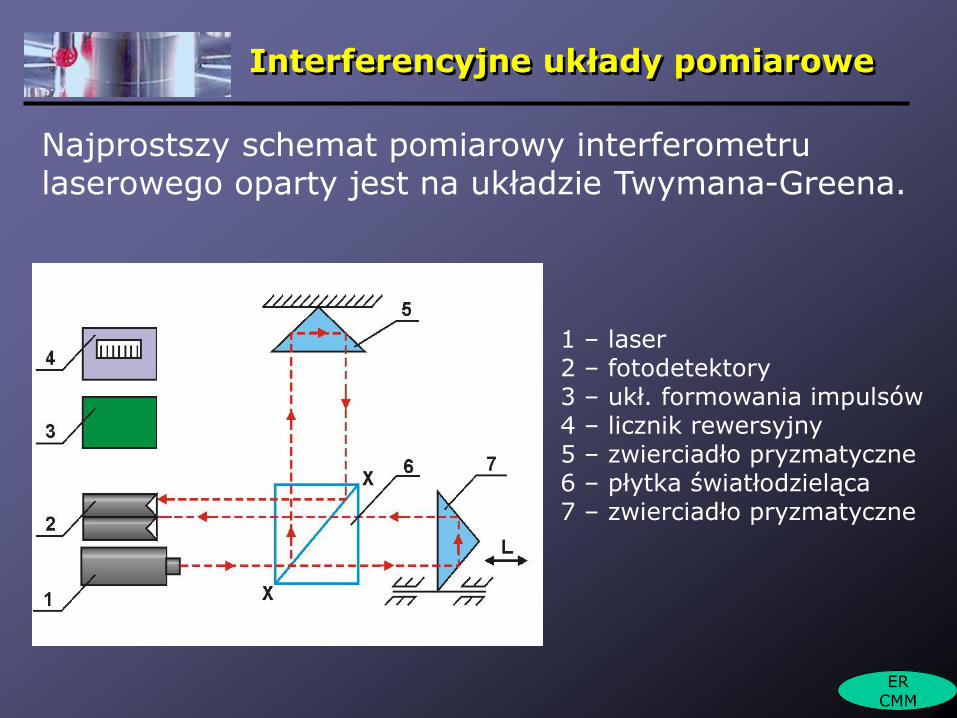
Interferencyjne układy pomiarowe
Najprostszy schemat pomiarowy interferometru laserowego oparty jest na układzie Twymana-Greena.
1 – laser 2 – fotodetektory 3 – ukł. formowania impulsów 4 – licznik rewersyjny 5 – zwierciadło pryzmatyczne 6 – płytka światłodzieląca 7 – zwierciadło pryzmatyczne
ER CMM
Głowice pomiarowe (sondy)
ER CMM
Głowice pomiarowe (sondy)
Służą do lokalizacji punktów pomiarowych – sygnał z przetwornika sondy pozwala sczytać współrzędne lokalizowanego punktu
Rodzaje:
głowice stykowe:
głowice bezstykowe:
głowice sztywne głowice przełączające (impulsowe) głowice mierzące
laserowe głowice triangulacyjne optoelektroniczne głowice wyposażone w kamerę CCD
ER CMM
Głowice przełączające (impulsowe)
Rodzaje:
głowice z przetwornikiem elektrostykowym
głowice z podwójnym przetwornikiem piezoelektrycznym i elektrostykowym
ER CMM
Głowice z przetwornikiem elektrostykowym
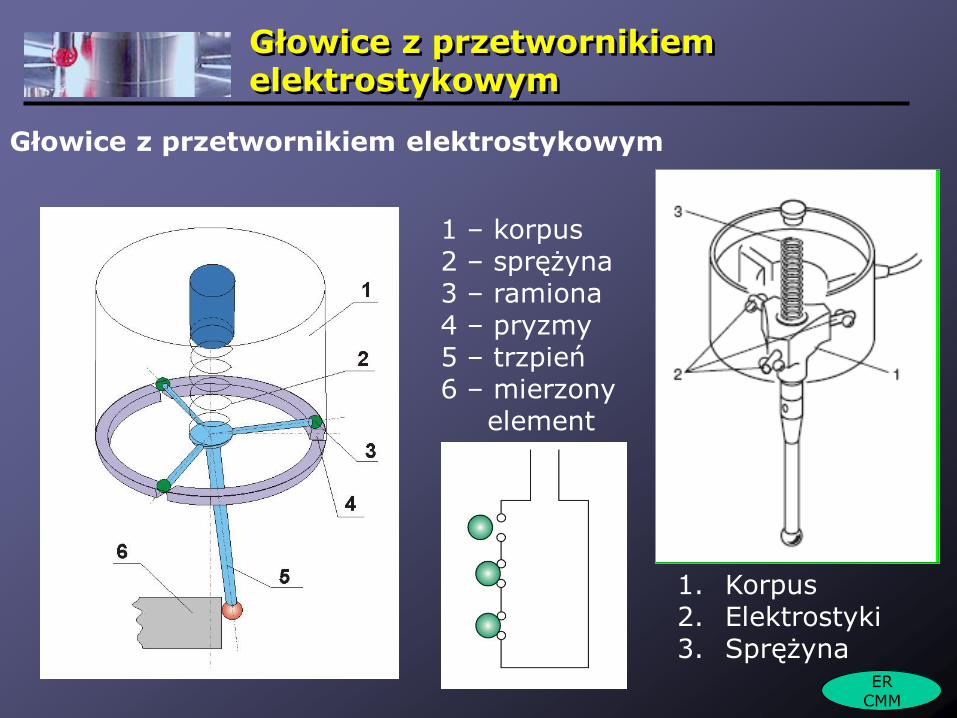
Głowice z przetwornikiem elektrostykowym
1 – korpus 2 – sprężyna 3 – ramiona 4 – pryzmy 5 – trzpień 6 – mierzony element
ER CMM
1. Korpus 2. Elektrostyki 3. Sprężyna

Głowice z przetwornikiem elektrostykowym
ER CMM
Prod. firmy ang. Renischaw TP200 Max powtarzalność jednokierunkowa ±0,40µm (0,14)*,
Powtarzalność w płaszczyźnie ±0,80µm (0,105)*
Przy l=50mm, V=480mm/min, * W zakupionym egzemplarzu
Powtarzalność jednokierunkowa ±0,35µm,
- „ - w płaszczyźnie ±0,80µm
Przy l=10mm, V=480mm/min,
TP-5WAY
Głowice z przetwornikiem elektrostykowym
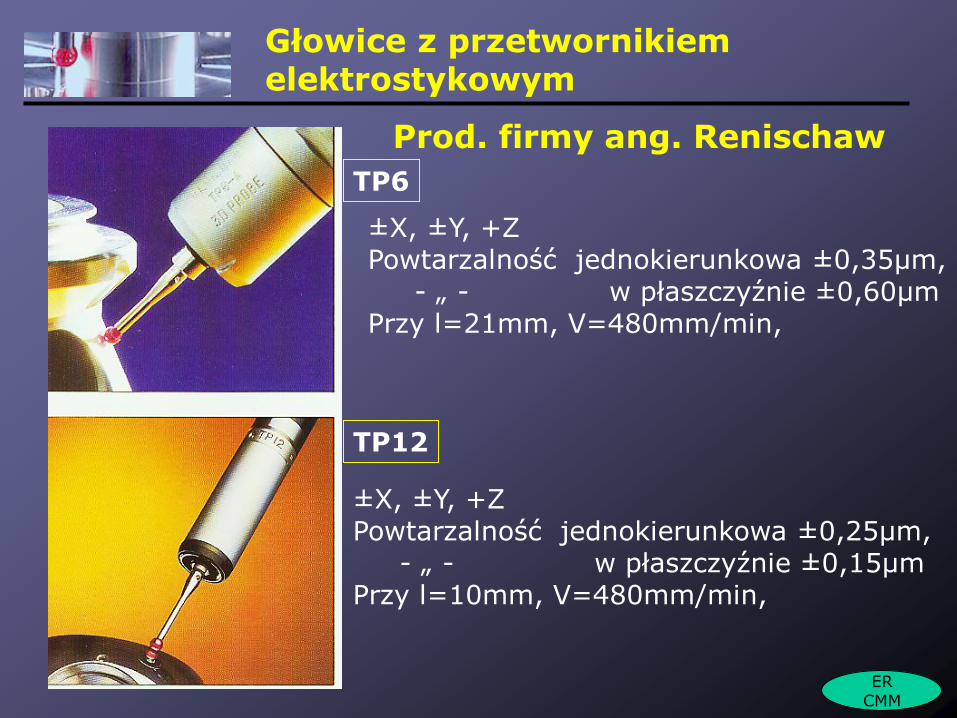
Prod. firmy ang. Renischaw
TP6
±X, ±Y, +Z Powtarzalność jednokierunkowa ±0,35µm, - „ - w płaszczyźnie ±0,60µm Przy l=21mm, V=480mm/min,
TP12
±X, ±Y, +Z Powtarzalność jednokierunkowa ±0,25µm, - „ - w płaszczyźnie ±0,15µm Przy l=10mm, V=480mm/min,
ER CMM

Głowice z przetwornikiem elektrostykowym
Głowice pomiarowe TP20 o konstrukcji modułowej firmy Renishaw
Do wymiany automatycznej zespołu trzpienia pomiarowego
Moduł trzpienia pomiarowego +przetwornik elektrostykowy
Moduł główny do połączenia
ER CMM
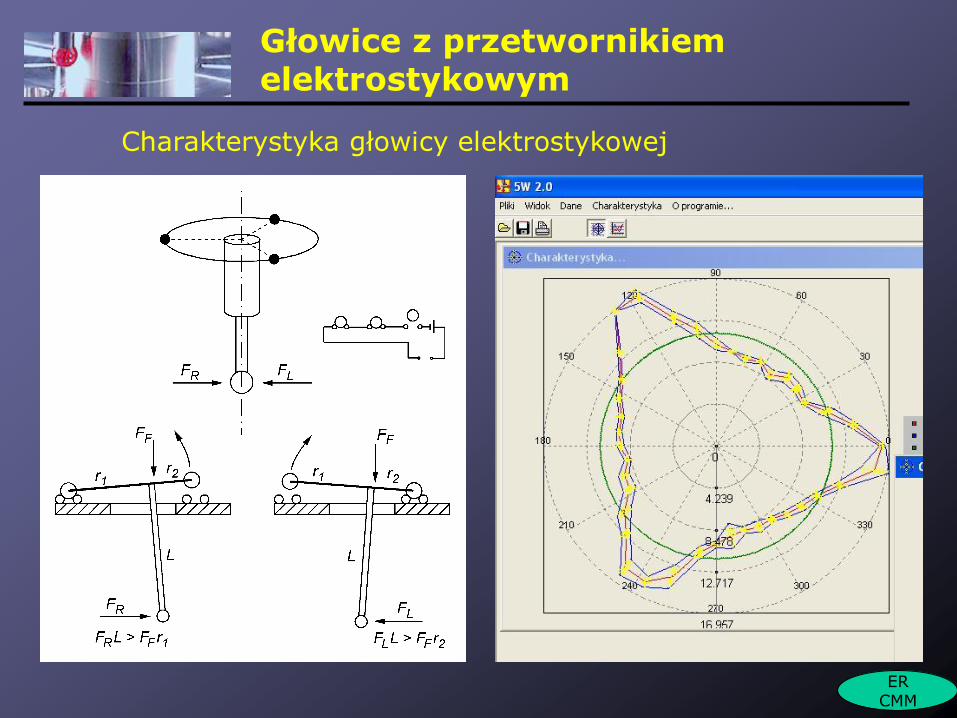
Głowice z przetwornikiem elektrostykowym
Charakterystyka głowicy elektrostykowej
ER CMM
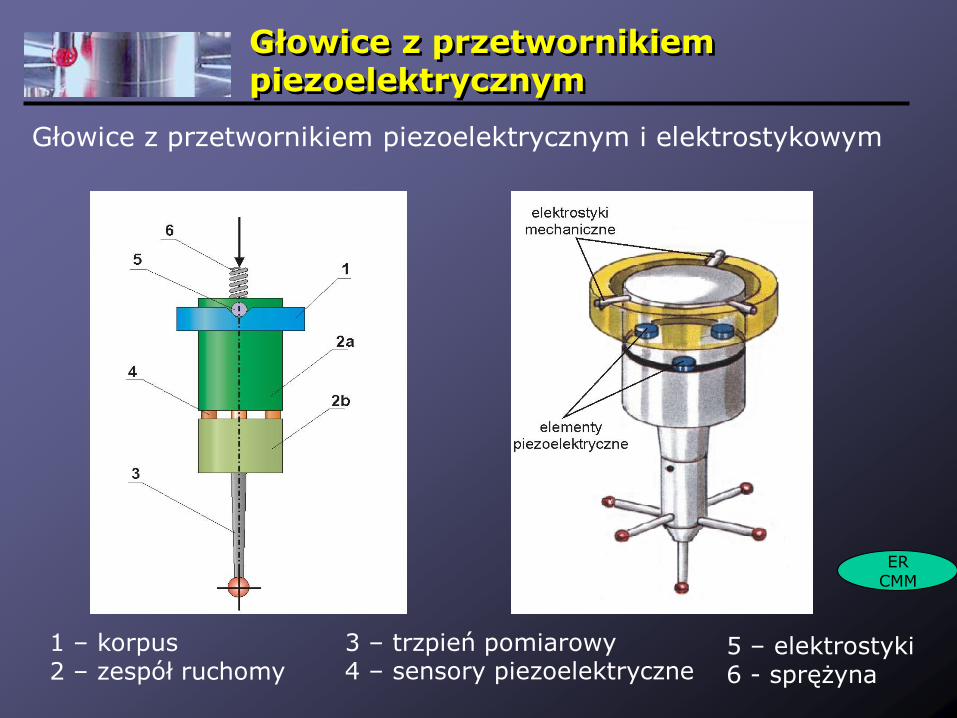
Głowice z przetwornikiem piezoelektrycznym
Głowice z przetwornikiem piezoelektrycznym i elektrostykowym
1 – korpus 2 – zespół ruchomy
3 – trzpień pomiarowy 4 – sensory piezoelektryczne
5 – elektrostyki 6 - sprężyna
ER CMM

Głowice z przetwornikiem piezoelektrycznym
Przykłady głowic prod. Firmy C.Zeiss:
ST
ER CMM
RST
ER CMM
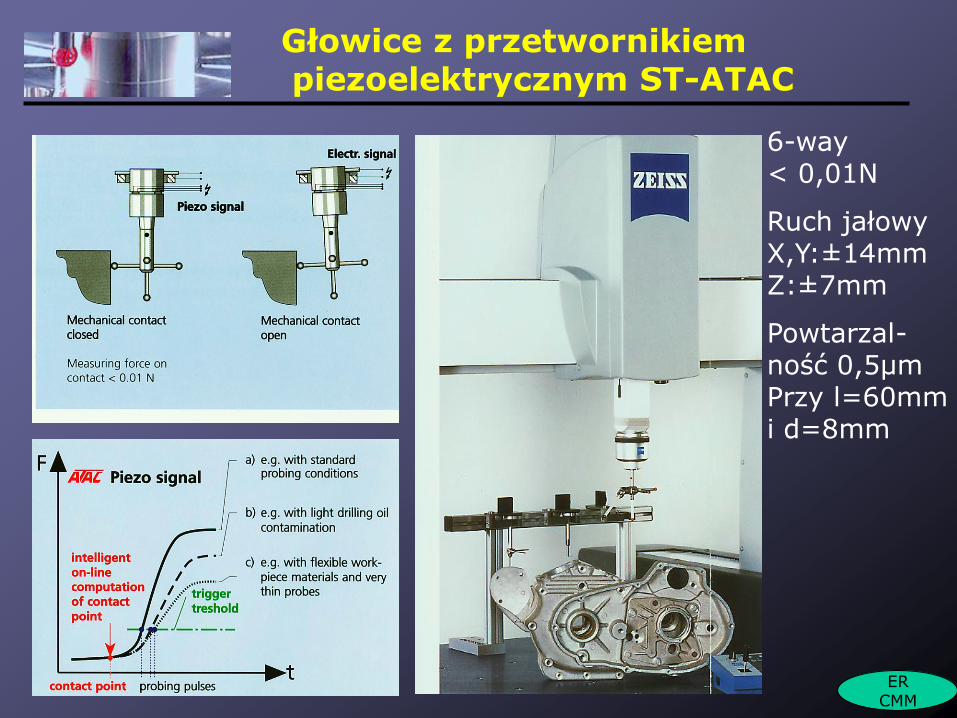
Głowice z przetwornikiem piezoelektrycznym ST-ATAC
6-way < 0,01N
Ruch jałowy X,Y:±14mm Z:±7mm
Powtarzal- ność 0,5µm Przy l=60mm i d=8mm

Głowice z przetwornikiem piezoelektrycznym i elektrostykowym firmy Renishaw
Moduł
główny
Moduł
trzpienia
pomiar.
SF,LF, EO
Moduł
główny
Moduł
trzpienia
pomiarowego
SH800
TP200 TP800-2
ER CMM
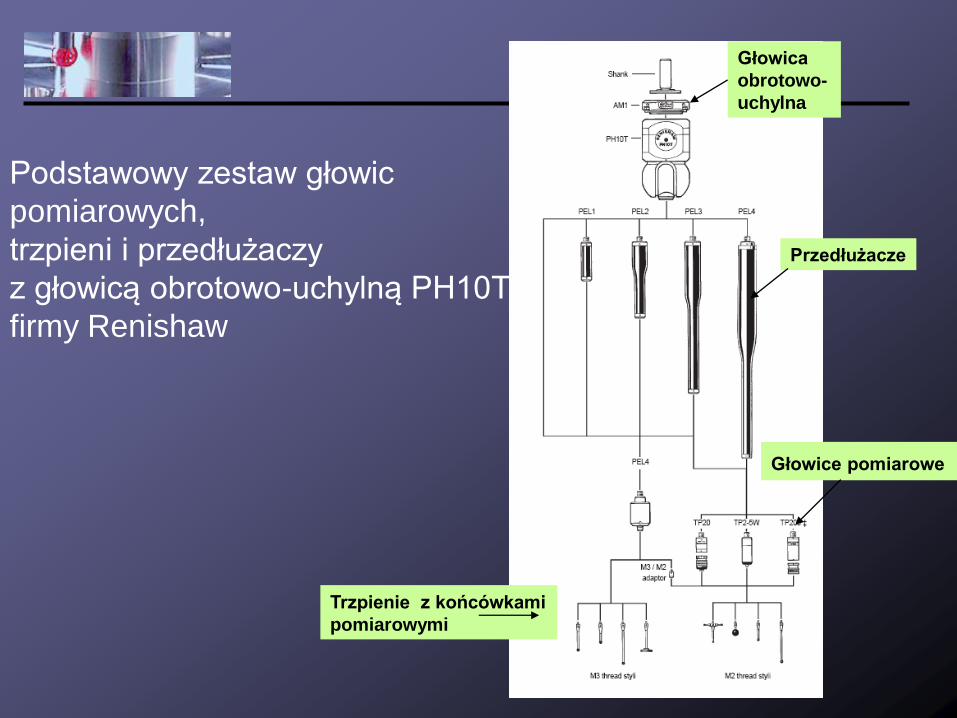
Podstawowy zestaw głowic
pomiarowych,
trzpieni i przedłużaczy
z głowicą obrotowo-uchylną PH10T
firmy Renishaw
Głowica
obrotowo-
uchylna
Przedłużacze
Głowice pomiarowe
Trzpienie z końcówkami
pomiarowymi
Głowice mierzące
Rodzaje:
głowice z przetwornikiem indukcyjnym
głowice z przetwornikiem optoelektronicznym
ER CMM
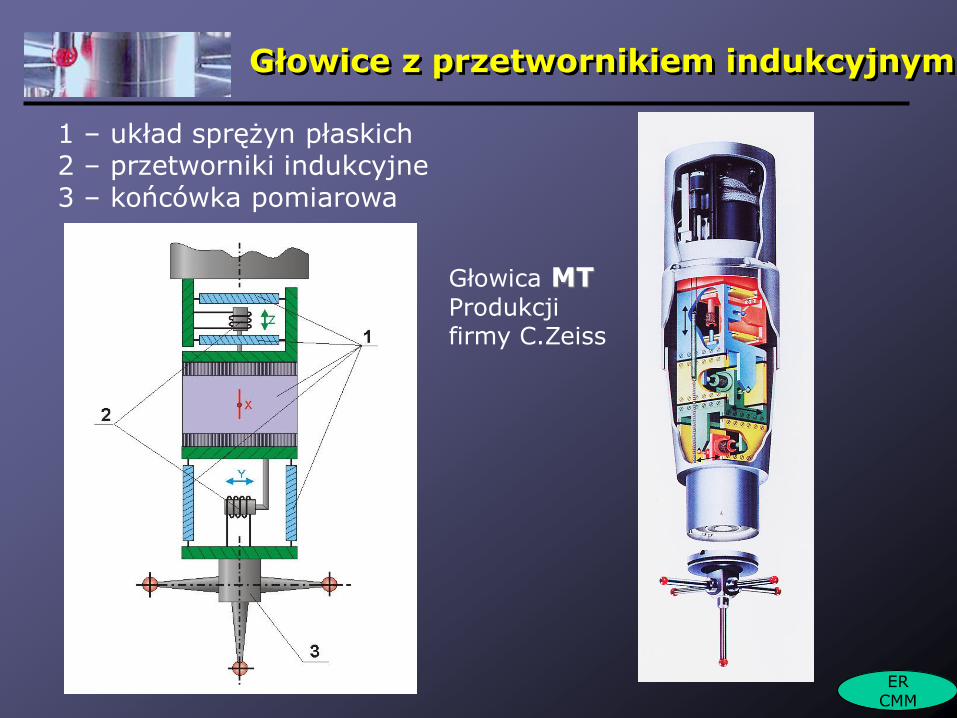
Głowice z przetwornikiem indukcyjnym
1 – układ sprężyn płaskich 2 – przetworniki indukcyjne 3 – końcówka pomiarowa
ER CMM
Głowica MT Produkcji firmy C.Zeiss

Głowice z przetwornikiem indukcyjnym
ER CMM
2002 VAST Navigator
Głowice z przetwornikiem indukcyjnym
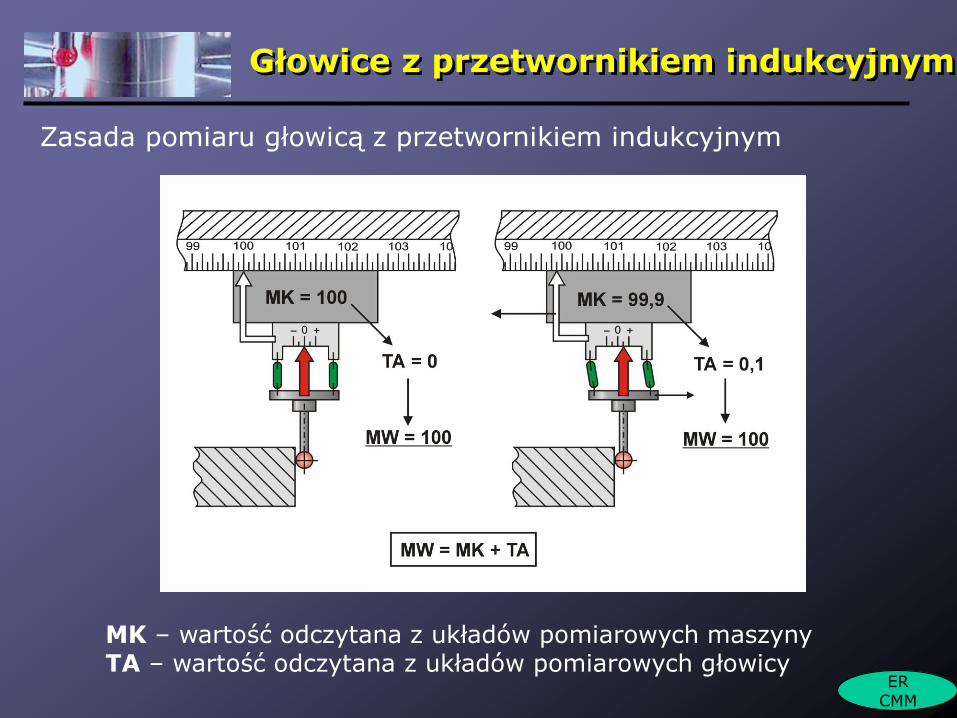
MK – wartość odczytana z układów pomiarowych maszyny TA – wartość odczytana z układów pomiarowych głowicy
Zasada pomiaru głowicą z przetwornikiem indukcyjnym
ER CMM
Głowice mierzące z przetwornikiem indukcyjnym
Rodzaje pomiaru głowicą mierzącą z przetwornikiem indukcyjnym firmy Zeiss:
» pomiar statyczny
» pomiar wielopunktowy
» pomiar skaningowy
» pomiar samocentrujący
ER CMM
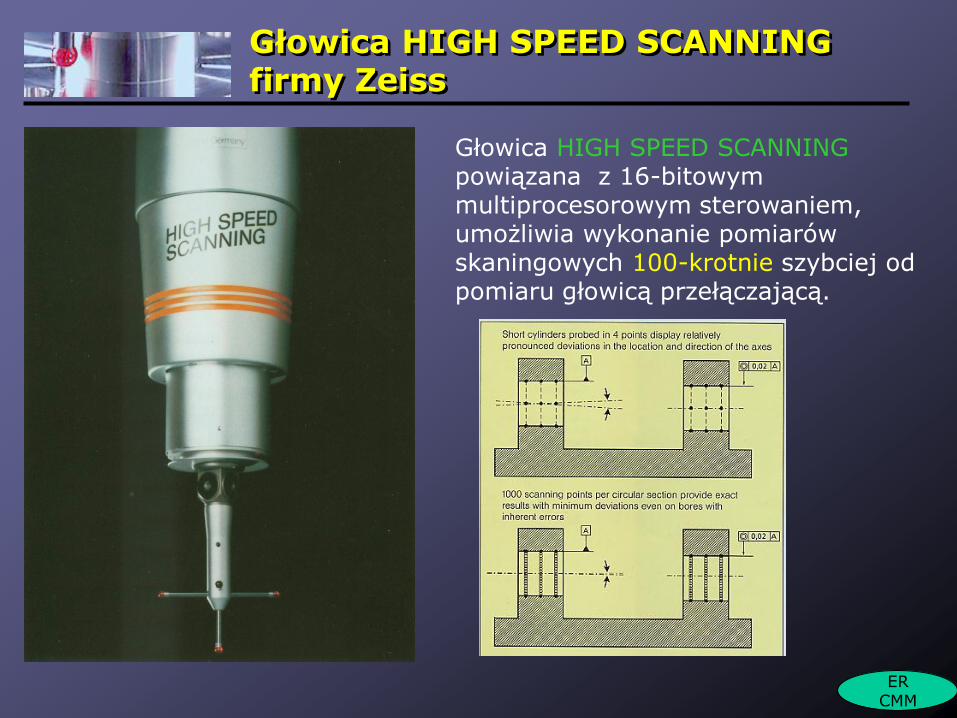
Głowica HIGH SPEED SCANNING firmy Zeiss
Głowica HIGH SPEED SCANNING powiązana z 16-bitowym multiprocesorowym sterowaniem, umożliwia wykonanie pomiarów skaningowych 100-krotnie szybciej od pomiaru głowicą przełączającą.
ER CMM
Pomiar skaningowy - film
High Speed Scanning
7:21min ER
CMM
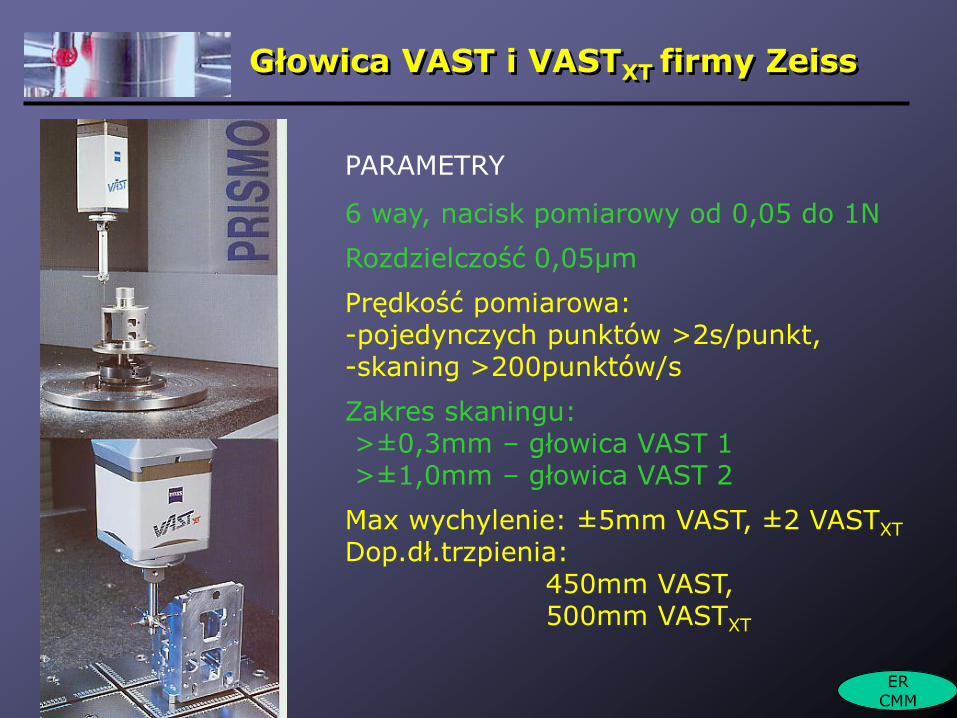
Głowica VAST i VASTXT firmy Zeiss
PARAMETRY
6 way, nacisk pomiarowy od 0,05 do 1N
Rozdzielczość 0,05µm
Prędkość pomiarowa: -pojedynczych punktów >2s/punkt, -skaning >200punktów/s
Zakres skaningu: >±0,3mm – głowica VAST 1 >±1,0mm – głowica VAST 2
Max wychylenie: ±5mm VAST, ±2 VASTXT
Dop.dł.trzpienia: 450mm VAST, 500mm VASTXT
ER
CMM
ER CMM
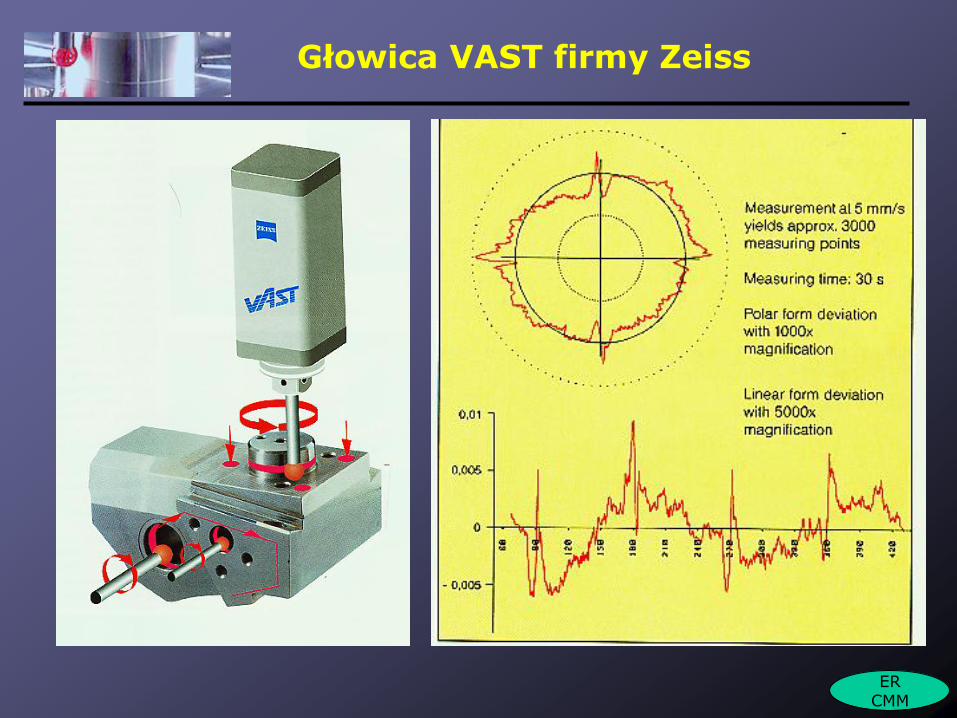
Głowica VAST firmy Zeiss
Actives Scanning
5:27min ER
CMM
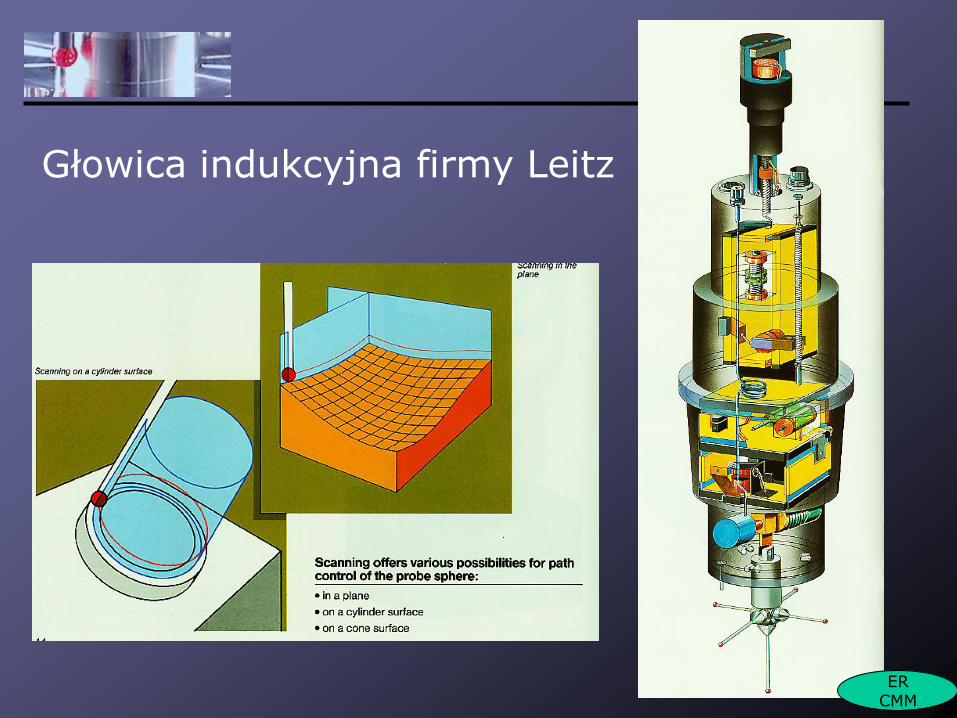
Głowica indukcyjna firmy Leitz
ER CMM
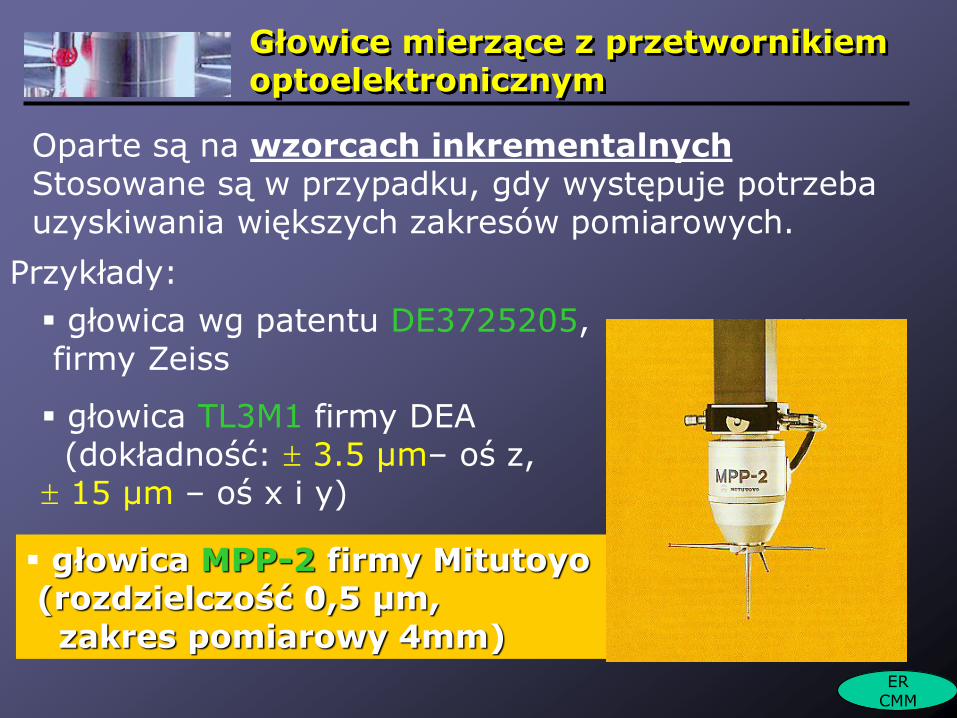
Głowice mierzące z przetwornikiem optoelektronicznym
Oparte są na wzorcach inkrementalnych Stosowane są w przypadku, gdy występuje potrzeba uzyskiwania większych zakresów pomiarowych.
głowica wg patentu DE3725205, firmy Zeiss
Przykłady:
głowica TL3M1 firmy DEA (dokładność: 3.5 μm– oś z, 15 μm – oś x i y)
ER CMM
głowica MPP-2 firmy Mitutoyo (rozdzielczość 0,5 μm, zakres pomiarowy 4mm)
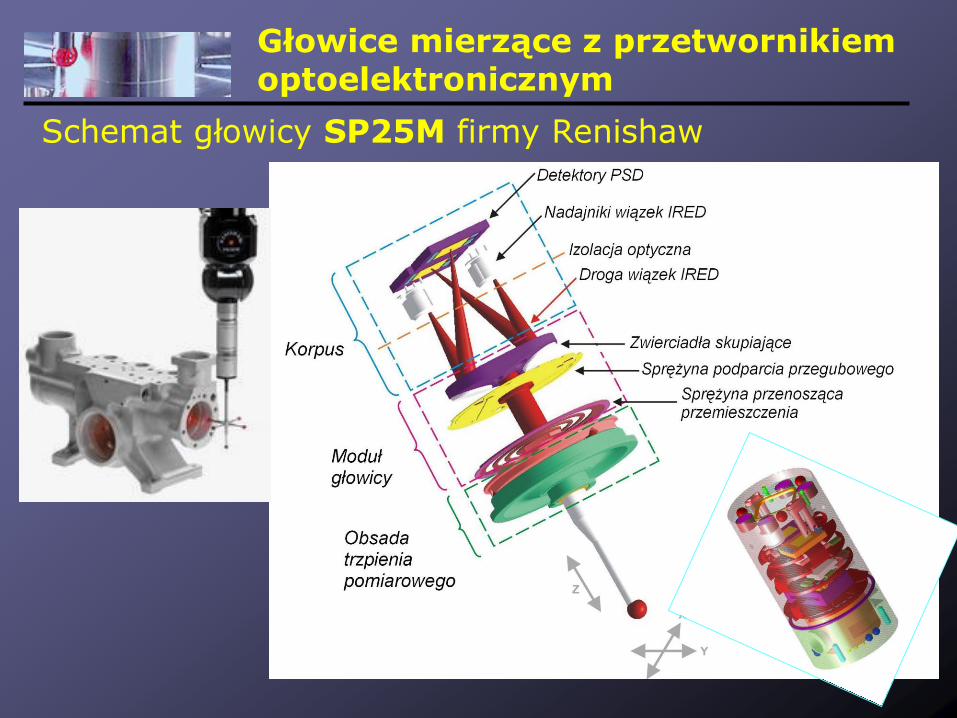
Głowice mierzące z przetwornikiem optoelektronicznym
Schemat głowicy SP25M firmy Renishaw

Głowice mierzące z przetwornikiem optoelektronicznym
Głowica SP25M firmy Renishaw
Korpus
głowicy
Moduł kinematyczny
Moduł
skanujący
Zakres pomiarowy: ±0,5mm
Rozdzielczość: 0,1µm
Nacisk pomiarowy: 0,2 do 0,6N/mm
Zakres ruchu jałowego: X,Y ±2mm, +Z 1,7mm, -Z 1,2mm
ER CMM

Głowice mierzące z przetwornikiem optoelektronicznym
Głowica SP25M firmy Renishaw
Głowice mierzące z przetwornikiem optoelektronicznym
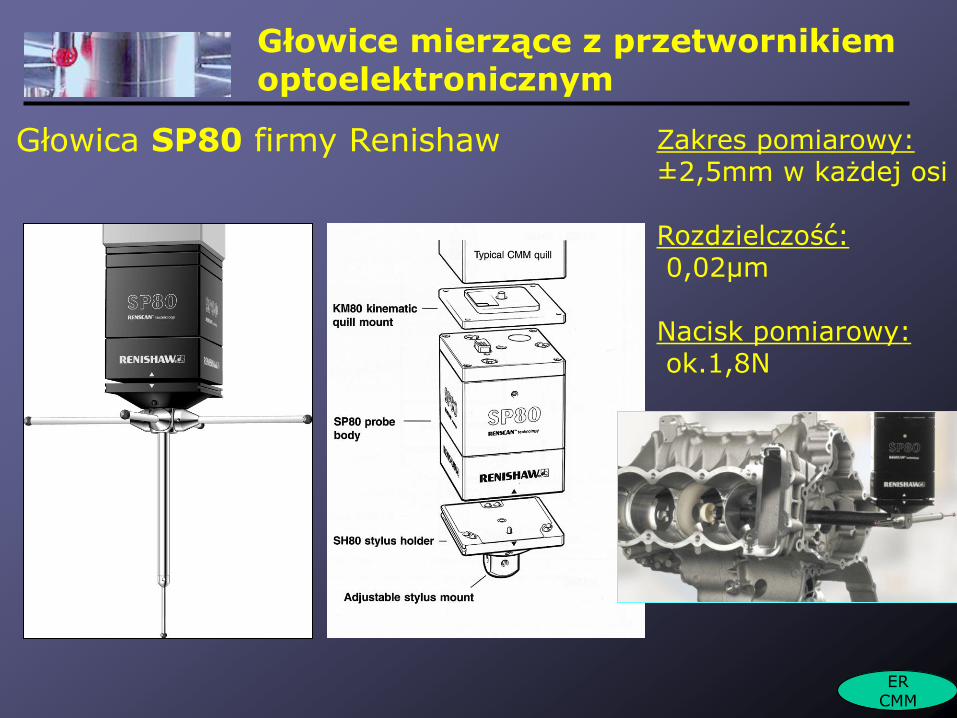
Głowica SP80 firmy Renishaw Zakres pomiarowy: ±2,5mm w każdej osi Rozdzielczość: 0,02µm Nacisk pomiarowy: ok.1,8N
ER CMM

Głowice mierzące z przetwornikiem optoelektronicznym
Schemat głowicy SP80 firmy Renishaw
Wzorce refleksyjne
Zespół ruchomy połączony z trzpieniem
Czytnik optyczny
Wiązka światła
Elektryczne połączenia
ER CMM

Głowica Revo Renscan 5 firmy Renishaw
Prędkość przemieszczania 500mm/s
Prędkość skanowania 6000p/s
Głowice mierzące

Łożyska aerostatyczne w obu osiach – wysoka sztywność i małe tarcie
0,08 arc-sek obrotowy enkoder – synchronizacja z CMM
Ultralekkiej konstrukcji końcówka odczytująca ze zintegrowanym laserem i odbiornikiem
Przyspieszeniomierz wykrywający ruch głowicy i przyspieszenie, zapewnia dynamiczną kompensację geometrii i skręcenia tulei łożyskowej CMM
Głowica Revo Renscan 5 firmy Renishaw
Głowice mierzące
Głowice mierzące
Głowica Revo Renscan 5 firmy Renishaw
Film
Głowice (sondy) bezstykowe
ER CMM
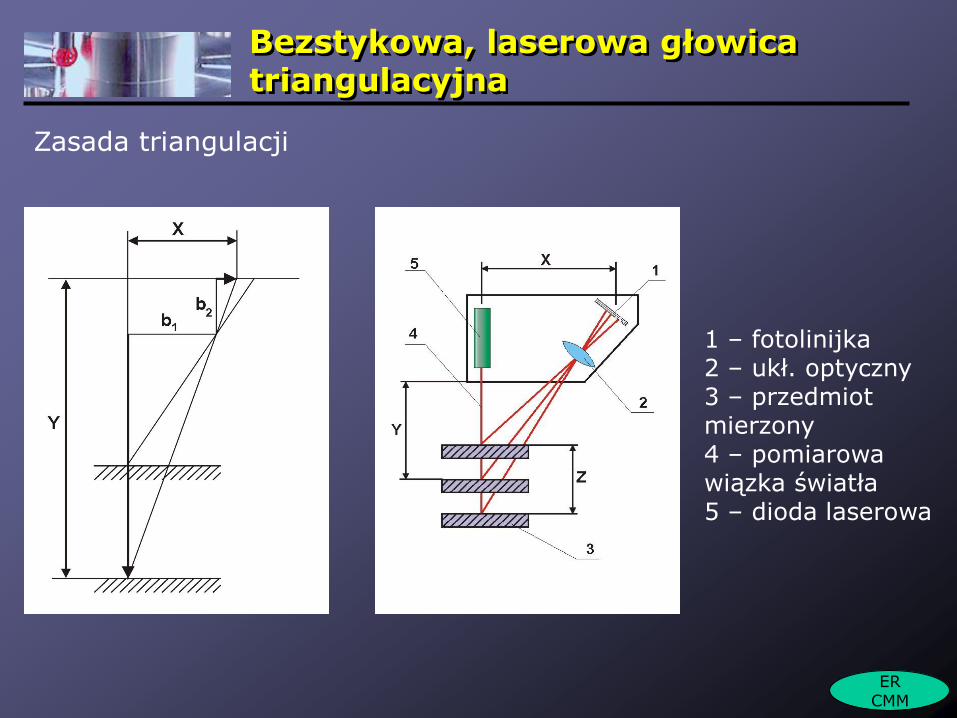
Bezstykowa, laserowa głowica triangulacyjna
Zasada triangulacji
1 – fotolinijka 2 – ukł. optyczny 3 – przedmiot mierzony 4 – pomiarowa wiązka światła 5 – dioda laserowa
ER CMM
Cechy pomiaru laserowymi głowicami triangulacyjnymi
Zalety i wady pomiaru laserowymi głowicami triangulacyjnymi:
Zalety:
» brak odkształceń mierzonego elementu (brak nacisku pomiarowego) » duża szybkość pomiarów (przy skanowaniu) » stosunkowo duży zakres pomiarowy
Wady:
» zależność dokładności pomiaru od własności rozpraszających powierzchni mierzonego elementu » mniejsza, w stosunku do głowic stykowych, dokładność
ER CMM
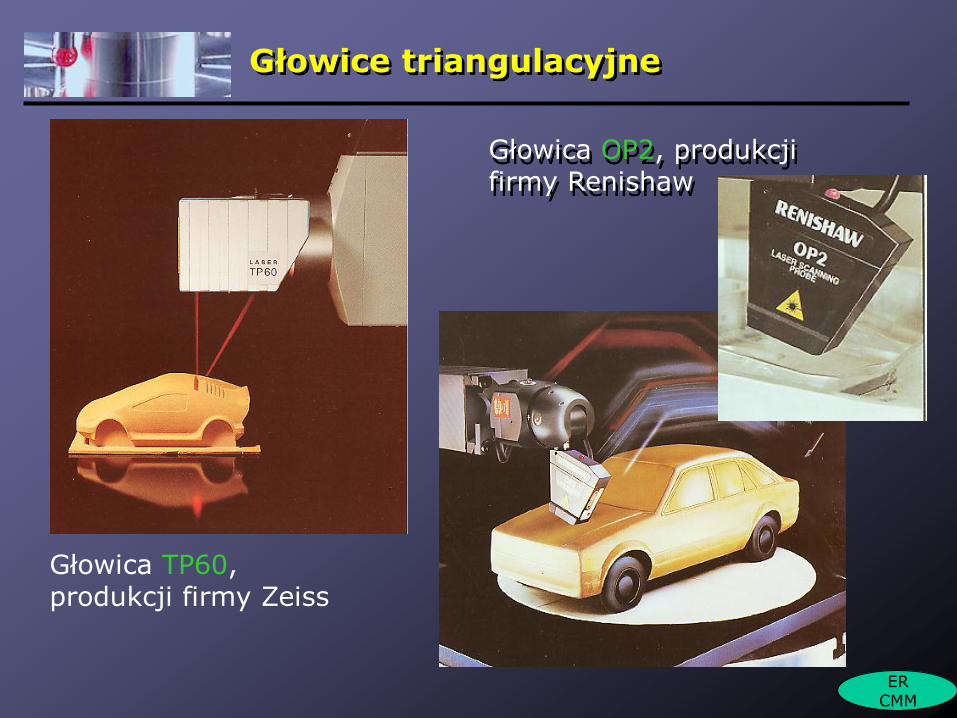
Głowice triangulacyjne
Głowica OP2, produkcji firmy Renishaw
ER CMM
Głowica TP60, produkcji firmy Zeiss
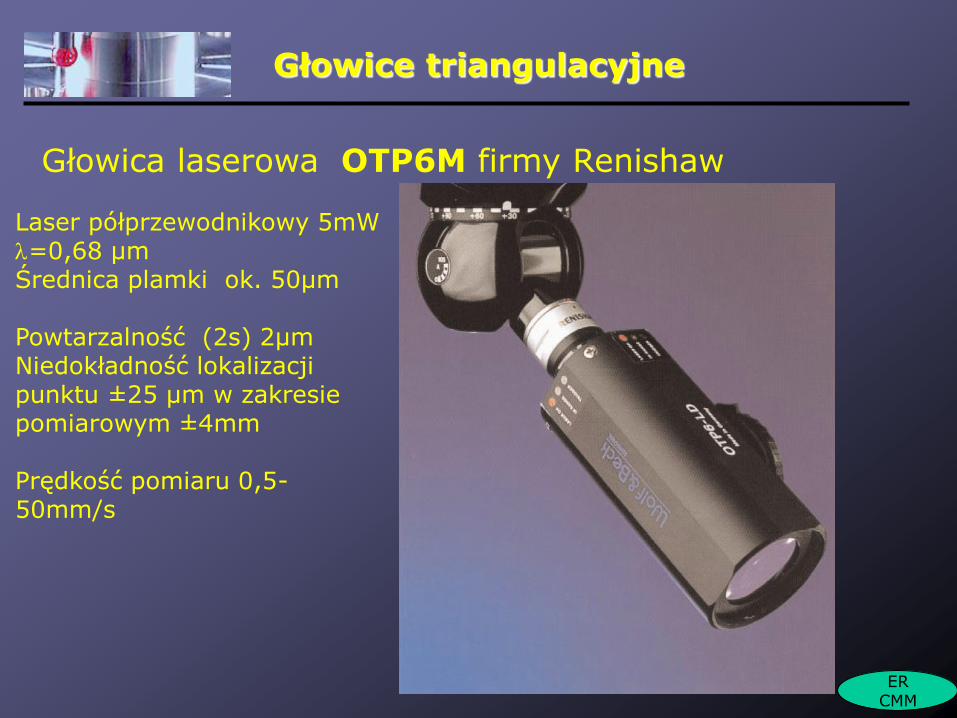
Głowica laserowa OTP6M firmy Renishaw
Laser półprzewodnikowy 5mW =0,68 µm Średnica plamki ok. 50µm Powtarzalność (2s) 2µm Niedokładność lokalizacji punktu ±25 µm w zakresie pomiarowym ±4mm Prędkość pomiaru 0,5-50mm/s
Głowice triangulacyjne
ER CMM
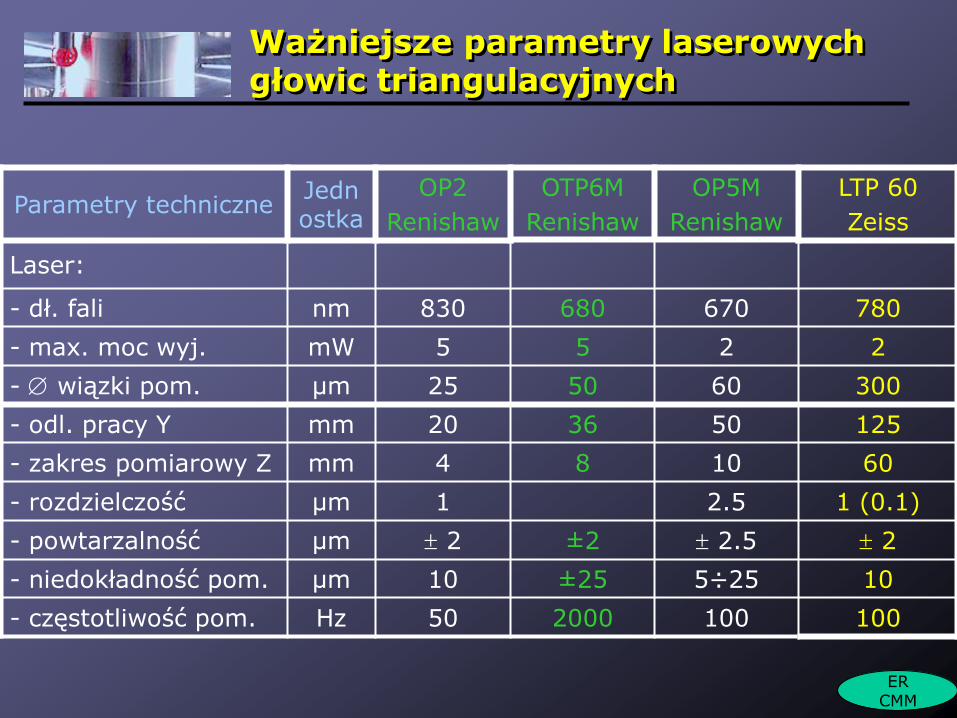
Ważniejsze parametry laserowych głowic triangulacyjnych
Parametry techniczne Jednostka
OP2
Renishaw
OTP6M
Renishaw
OP5M
Renishaw
LTP 60
Zeiss
Laser:
- dł. fali nm 830 680 670 780
- max. moc wyj. mW 5 5 2 2
- wiązki pom. µm 25 50 60 300
- odl. pracy Y mm 20 36 50 125
- zakres pomiarowy Z mm 4 8 10 60
- rozdzielczość µm 1 2.5 1 (0.1)
- powtarzalność µm 2 ±2 2.5 2
- niedokładność pom. µm 10 ±25 5÷25 10
- częstotliwość pom. Hz 50 2000 100 100
ER CMM

Głowice triangulacyjne
Głowica AutoScan firmy C.Zeiss
Skanowanie powierzchni, krawędzi i linii konturowych z prędkością ok.400p/s na szerokości 10mm
ER CMM

Głowice triangulacyjne
Głowica EAGLEEYE Navigator firmy C.Zeiss
Laser generuje linię świetlną uzyskanie 20 000 wartości punktów na sek.
ER
CMM
ER CMM

Głowice z kamerą CCD
Głowica ViSCAN firmy C.Zeiss Pomiary w zakresie 2D: małe wymiary, np. obwody drukowane, elementy z miękkich materiałów
Matryca CCD 1/3”, Rozdzielczość: 769(pozioma)x575(pionowa) Rozmiar piksli 6,0x6,0µm Aktywna powierzchnia 4,8x3,6mm Powiększenia od 0,14, 0,3, 0,5 do 8x
ER CMM

Głowice z kamerą CCD
Głowica QVP firmy Mitutoyo
Kamera CCD ½”
Kołowe oświetlenie
Powiększenia obiektywów 1x, 3x (standard), 5x i 10x
Pole obserwacyjne:
9,6x12,8mm, 3,2x4,3mm
1,9x2,2mm, 1x1,3mm
Powtarzalność (3s) ±1µm
Pomiary otworów, szczelin, rowki, zarysy, kontury, krawędzie, itp.
ER
CMM
Głowice z kamerą CCD
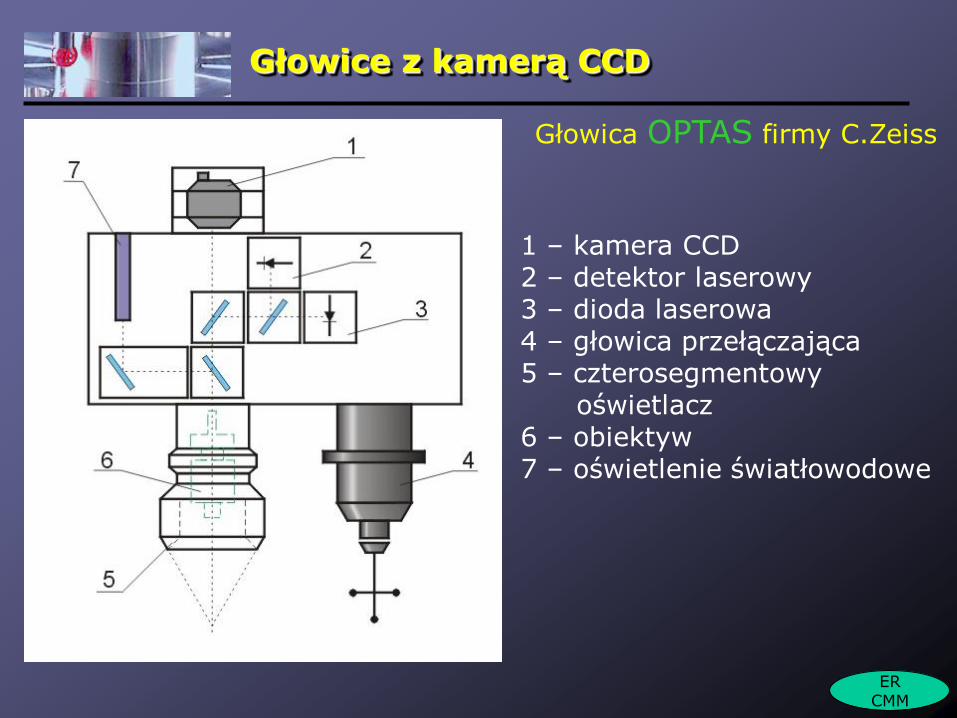
1 – kamera CCD 2 – detektor laserowy 3 – dioda laserowa 4 – głowica przełączająca 5 – czterosegmentowy oświetlacz 6 – obiektyw 7 – oświetlenie światłowodowe
ER CMM
Głowica OPTAS firmy C.Zeiss

Bezstykowa optoelektroniczna głowica z kamerą CCD
Głowica OPTAS, produkcji firmy Zeiss
ER CMM
Konfiguracje głowic i trzpieni pomiarowych
Rodzaje:
1. Zestaw trzpieni pomiarowych, np. układ typu gwiazda,
2. Magazynki ramowe i karuzelowe,
3. Głowice obrotowo-uchylne (tzw. przegubowe)
ER CMM
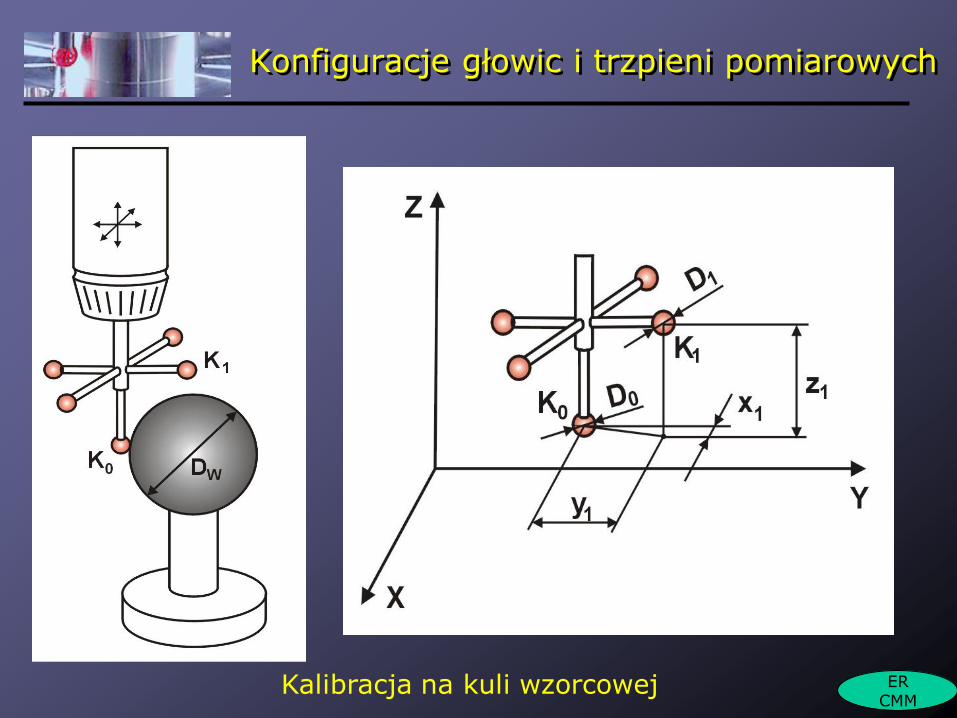
Konfiguracje głowic i trzpieni pomiarowych
ER CMM
Kalibracja na kuli wzorcowej
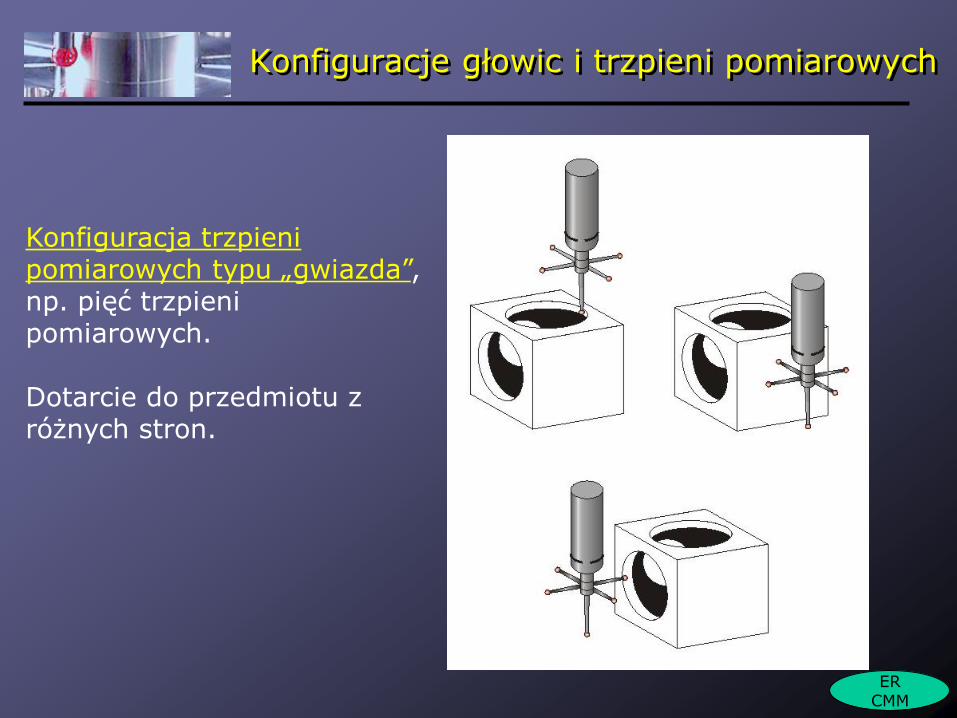
Konfiguracje głowic i trzpieni pomiarowych
Konfiguracja trzpieni pomiarowych typu „gwiazda”, np. pięć trzpieni pomiarowych. Dotarcie do przedmiotu z różnych stron.
ER CMM

Konfiguracje głowic i trzpieni pomiarowych
Konfiguracje trzpieni do głowic firmy C.Zeiss
ER CMM
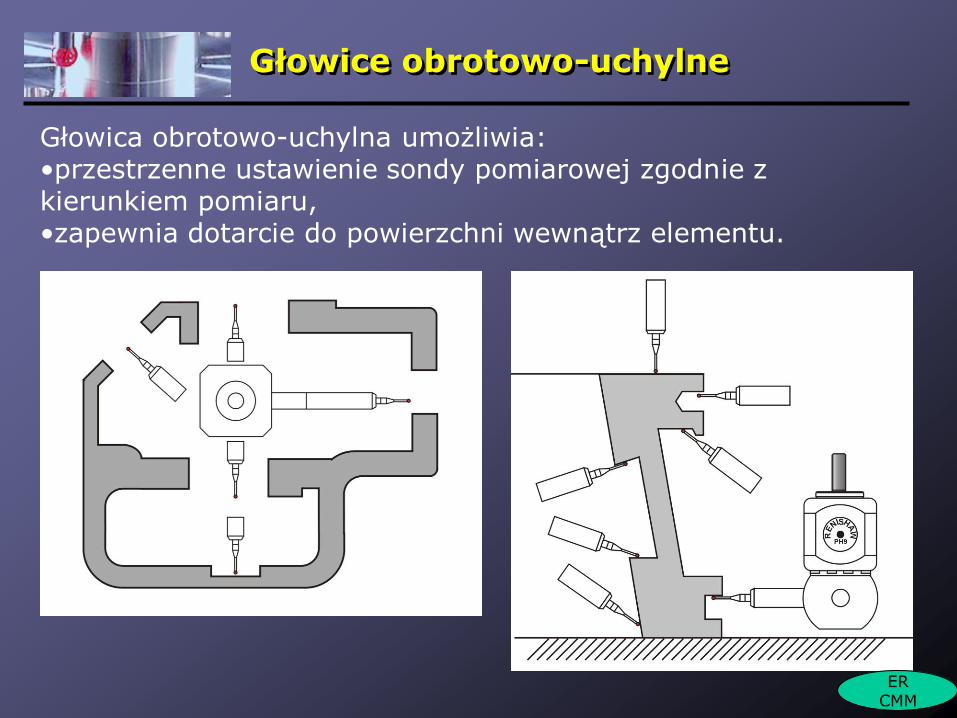
Głowice obrotowo-uchylne
Głowica obrotowo-uchylna umożliwia: •przestrzenne ustawienie sondy pomiarowej zgodnie z kierunkiem pomiaru, •zapewnia dotarcie do powierzchni wewnątrz elementu.
ER CMM
Głowice obrotowo-uchylne
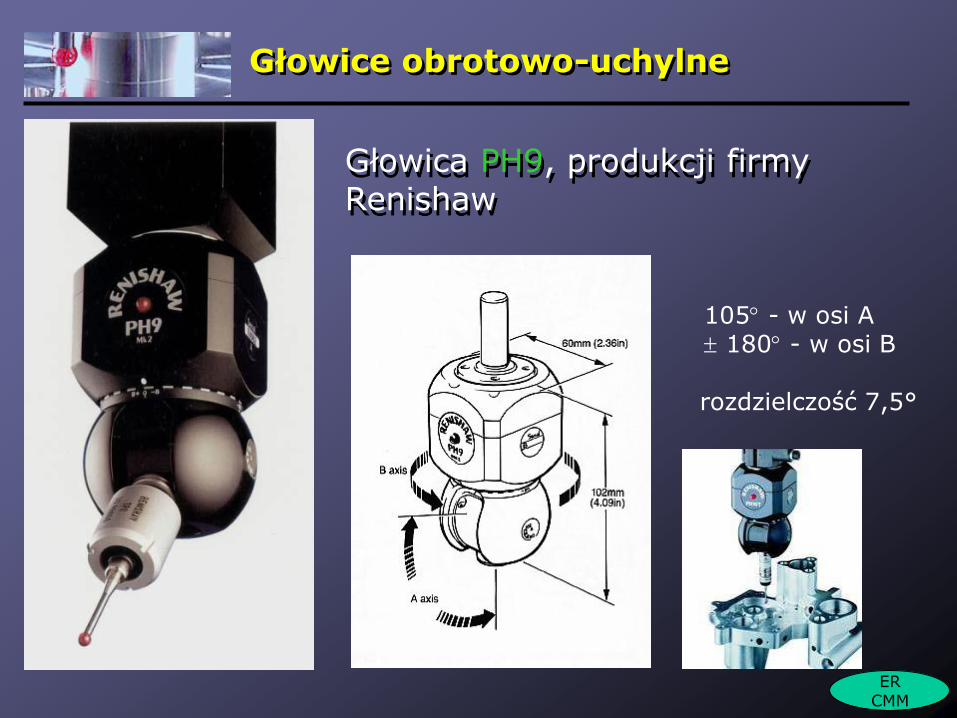
Głowica PH9, produkcji firmy Renishaw
105 - w osi A 180 - w osi B
rozdzielczość 7,5°
ER CMM
Głowice obrotowo-uchylne
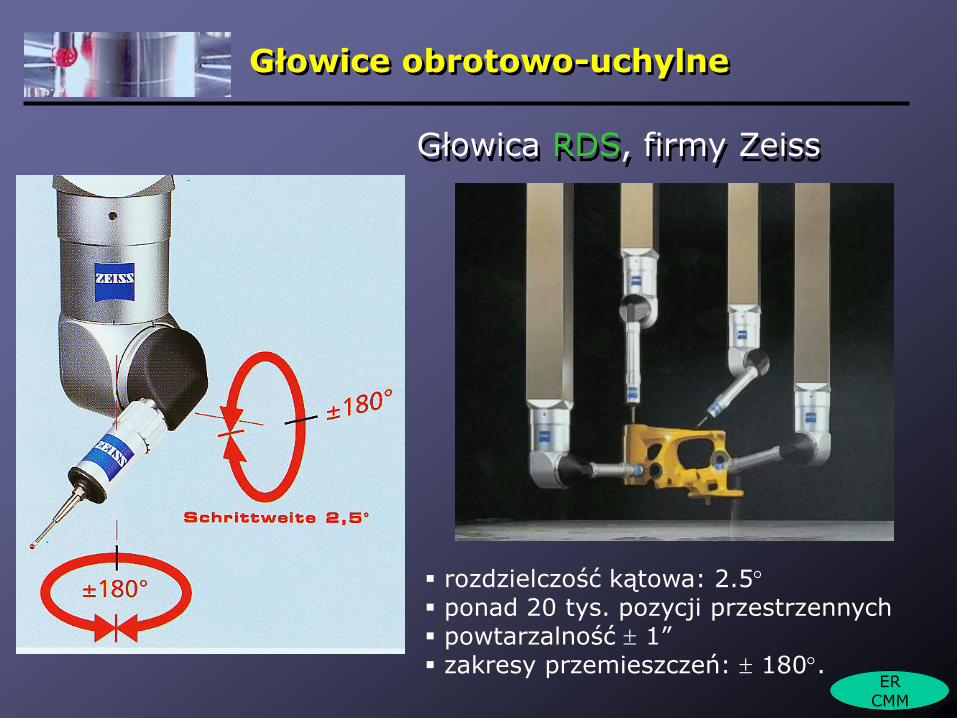
Głowica RDS, firmy Zeiss
rozdzielczość kątowa: 2.5 ponad 20 tys. pozycji przestrzennych powtarzalność 1” zakresy przemieszczeń: 180.
ER CMM
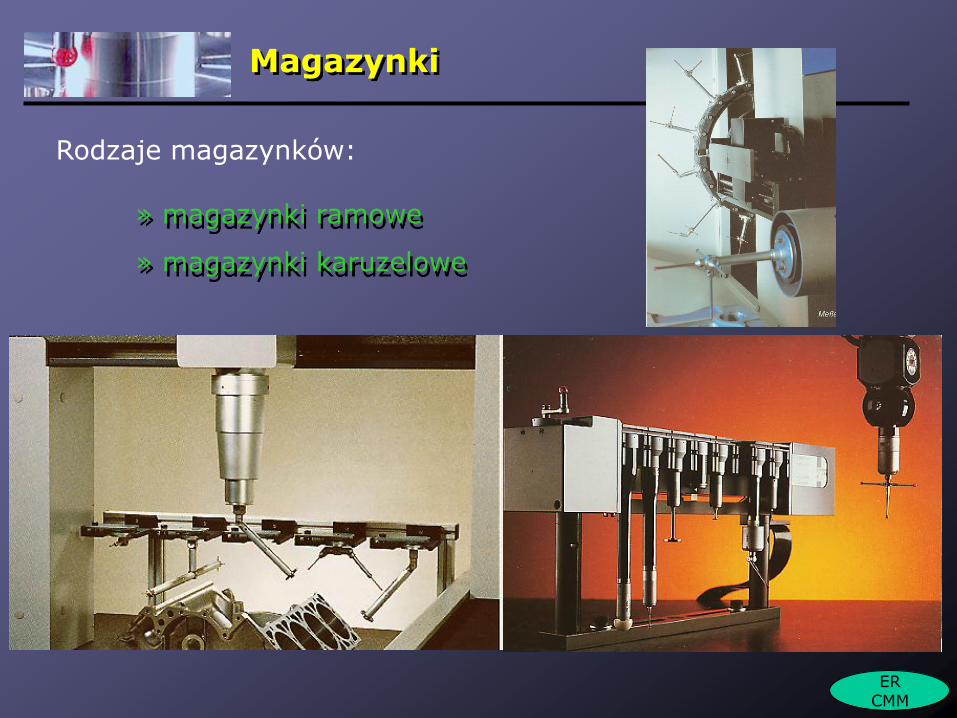
Magazynki
Rodzaje magazynków:
» magazynki ramowe
» magazynki karuzelowe
ER CMM
Dziękuję za uwagę
Część III obejmuje oprogramowania