Embed Size (px)
Citation preview

Podstawy Automatyki
Wykład 5 - stabilność liniowych układów dynamicznych
dr inż. Jakub Możaryn
Instytut Automatyki i Robotyki
Warszawa, 2019
dr inż. Jakub Możaryn Podstawy Automatyki

Wstęp
Stabilność
O układzie możemy mówić, że jest stabilny jeżeli jego odpowiedź na wy-muszenie (zakłócenie) o ograniczonej wartości jest ograniczona.
O układzie możemy mówić, że jest stabilny gdy wytrącony ze stanu rów-nowagi (rozpatrywanego punktu pracy P) powraca do niej (do pewnegostanu K ) po ustaniu działania czynników (zakłóceń z), które go z tegostanu wytrąciły.
W przypadku układów liniowych, zachowanie się układu po zaniku od-działywania, które wytrąciło go ze stanu równowagi, jest cechą charaktery-styczną danego układu i nie zależy od przebiegu oddziaływania przed jegozanikiem. (łatwa analiza)
W przypadku układów nieliniowych, ich zachowanie pod wpływem wy-muszeń i po ich zaniku może zależeć od punktu pracy układu oraz odrodzaju i wielkości wymuszeń. (trudna analiza)
dr inż. Jakub Możaryn Podstawy Automatyki

Stabilność
Możliwe są trzy rodzaje zachowań układów po wytrąceniu ze stanu rów-nowagi:
1 Układ nie osiąga stanu równowagi - układ niestabilny; szczególnymprzypadkiem takiego zachowania jest wykonywanie przez układoscylacji o stałej amplitudzie - układ na granicy stabilności.
2 Układ powraca do stanu równowagi w punkcie pracy zajmowanymprzed wytrąceniem go ze stanu równowagi - układ stabilnyasymptotycznie,
3 Układ osiąga stan równowagi w innym punkcie pracy niż początkowy- układ stabilny nieasymptotycznie,
dr inż. Jakub Możaryn Podstawy Automatyki

Stabilność
Rysunek 1: Układ a) niestabilny, b) stabilny asymptotycznie, c) stabilnynieasymptotycznie
dr inż. Jakub Możaryn Podstawy Automatyki

Odpowiedź na wymuszenie impulsowe
Wymuszenie impulsowe jest najprostszym przypadkiem wymuszenia, po-zwalającego określić stabilność liniowego układu dynamicznego.
Impuls - Delta Diraca
x(t) = δ(t) =
{0 dla t 6= 0∞ dla t = 0
(1)
x(s) = 1 (2)
Odpowiedź na wymuszenie impulsowe wyznacza się korzystając z zależności
y(t)|u(t)=δ = L−1{G (s)x(s)} −−−−−−→dla x(s)=1
y(t) = L−1{G (s)} (3)
dr inż. Jakub Możaryn Podstawy Automatyki

Odpowiedź na wymuszenie impulsowe
Wybrane orginały trasformat Laplace’a po wymuszeniu impulsowym,przydatne do analizy:
L−1{
1s
}= 1(t) (4)
L−1{
1s2
}= t (5)
L−1{
1s ± α
}= e∓αt (6)
L−1{
1(s ± α)2
}= te∓αt (7)
L−1{
As + B
s2 + Cs + D
}= Ae
C2 t cos
(t
√D − C 2
4
)+
+2B − AC√
4D + C 2e
C2 t sin
(t
√D − C 2
4
) (8)
jeżeli: C 2 − 4D < 0 (nie ma pierwiastków rzeczywistych).
dr inż. Jakub Możaryn Podstawy Automatyki

Odpowiedź na wymuszenie impulsowe
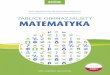
Rysunek 2: Przykładowe odpowiedzi impulsowe układów: 1, 2 – stabilnychnieasymptotycznie, 3, 4 - stabilnych asymptotycznie, 5, 6 – niestabilnych, 7 –układ na granicy stabilności (drgania niegasnące)
dr inż. Jakub Możaryn Podstawy Automatyki

Stabilność
Równanie ruchu liniowego, stacjonarnego układu dynamicznego
and (n)y(t)
dt(n)+ · · ·+ a1
dy(t)
dt+ a0 = bm
d (m)u(t)
dt(m)+ · · ·+b1
du(t)
dt+b0 (9)
Transmitancja operatorowa
G (s) =Y (s)
U(s)=
bmsm + · · ·+ b2s
2 + b1s + b0ansn + · · ·+ a2s2 + a1s + a0
(10)
Odpowiedź impulsowa
y(t)|u(t)=δ = g(t) = L−1{G (s)} (11)
Równanie charakterystyczne - mianownik transmitancji operatorowej
dr inż. Jakub Możaryn Podstawy Automatyki

Stabilność asymptotyczna
Przypadek 1: Równanie charakterystyczne ma tylko ujemne, pojedynczepierwiastki rzeczywiste.
G (s) =L(s)
an(s − s1)(s − s2) . . . (s − sn)(12)
Po rozłożeniu na ułamki proste
G (s) =C1
s − s1+
C2s − s2
+ · · ·+ Cn
s − sn(13)
y(t) = L−1{G (s)} = C1es1t + C2e
s2t + ...+ Cnesnt (14)
limt→∞
y(t) = 0 jeżeli s1, . . . , sn < 0 (15)
Układ jest stabilny asymptotycznie.
dr inż. Jakub Możaryn Podstawy Automatyki

Stabliność asymptotyczna
Rysunek 3: Położenie pierwiastków równania charakterystycznego napłaszczyznie liczb zespolonych s
dr inż. Jakub Możaryn Podstawy Automatyki

Stabilność asymptotyczna
Przypadek 2: Równanie charakterystyczne ma jeden podwójny, ujemny,pierwiastek rzeczywisty, a pozostałe pierwiastki są pojedyncze, ujemne,rzeczywiste.
G (s) =L(s)
an(s − s1)2(s − s3) . . . (s − sn)(16)
Po rozłożeniu na ułamki proste
G (s) =C1
s − s1+
C2(s − s1)2
+C3
s − s3+ · · ·+ Cn
s − sn(17)
y(t) = L−1{G (s)} = C1es1t + C2te
s1t + C3es3t + ...+ Cne
snt (18)
limt→∞
y(t) = 0 jeżeli s1, . . . , sn < 0 (19)
ponieważ funkcja wykładnicza es1t |s1<0 −−−−−→dla t→∞
0.
Układ jest stabilny asymptotycznie.
dr inż. Jakub Możaryn Podstawy Automatyki

Stabliność asymptotyczna
Rysunek 4: Położenie pierwiastków równania charakterystycznego napłaszczyznie liczb zespolonych s
dr inż. Jakub Możaryn Podstawy Automatyki

Stabilność nieasymptotyczna
Przypadek 3: Równanie charakterystyczne ma jeden pierwiastek zerowy apozostałe pierwiastki pojedyncze ujemne rzeczywiste
G (s) =L(s)
an(s)(s − s2) . . . (s − sn)(20)
Po rozłożeniu na ułamki proste
G (s) =C1s
+C2
s − s2+ · · ·+ Cn
s − sn(21)
y(t) = L−1{G (s)} = C1 + C2es2t + ...+ Cne
snt (22)
limt→∞
y(t) = C1 jeżeli s2, . . . , sn < 0 (23)
Układ jest stabilny nieasymptotycznie.
dr inż. Jakub Możaryn Podstawy Automatyki

Stabliność nieasymptotyczna
Rysunek 5: Położenie pierwiastków równania charakterystycznego napłaszczyznie liczb zespolonych s
dr inż. Jakub Możaryn Podstawy Automatyki

Brak stabilności
Przypadek 4: Równanie charakterystyczne ma dwa (lub więcej) pierwiastkizerowe a pozostałe pierwiastki pojedyncze ujemne rzeczywiste.
G (s) =L(s)
an(s)2(s − s3) . . . (s − sn)(24)
Po rozłożeniu na ułamki proste
G (s) =C1s
+C2
(s)2+
C3s − s3
+ · · ·+ Cn
s − sn(25)
y(t) = L−1{G (s)} = C1 + C2t + C3es3t + ...+ Cne
snt (26)
limt→∞
y(t) =∞ ponieważ C2t →∞ (27)
Układ jest niestabilny.
dr inż. Jakub Możaryn Podstawy Automatyki

Brak stabilności
Rysunek 6: Położenie pierwiastków równania charakterystycznego napłaszczyznie liczb zespolonych s
dr inż. Jakub Możaryn Podstawy Automatyki

Stabilność asymptotyczna (oscylacje)
Przypadek 5: Równanie charakterystyczne ma niezerowe pojedyncze pier-wiastki rzeczywiste i pierwiastki zespolone sprzężone - o ujemnych czę-ściach rzeczywistych
s1 = a + jb, s2 = a− jb (28)
G (s) =L(s)
an(s2 − 2as + a2 + b2)(s − s3) . . . (s − sn)(29)
po rozłożeniu na ułamki proste
G (s) =C1s + C2
(s2 − 2as + a2 + b2)+
C3s − s3
+ · · ·+ Cn
s − sn(30)
y(t) = L−1{G (s)} = C1eat cos(bt)+
C2 + aC1b
eatsin(bt)+C3es3t+...+Cne
snt
(31)limt→∞
y(t) = 0 jeżeli a < 0, i Re(s3), . . . ,Re(sn) < 0 (32)
Układ jest stabilny asymptotycznie, z gasnącymi oscylacjami (czynnik eks-potencjalny przy funkcjach okresowych).
dr inż. Jakub Możaryn Podstawy Automatyki

Stabilność asymptotyczna (oscylacje)
Rysunek 7: Położenie pierwiastków równania charakterystycznego napłaszczyznie liczb zespolonych s
dr inż. Jakub Możaryn Podstawy Automatyki

Brak stabilności (granica stabliności)
Przypadek 6: Równanie charakterystyczne ma niezerowe pojedyncze pier-wiastki rzeczywiste i pierwiastki zespolone sprzężone o zerowych częściachrzeczywistych
x1 = jb, x2 = −jb (33)
G (s) =L(s)
(s2 + b2)(s − s3) . . . (s − sn)(34)
po rozłożeniu na ułamki proste
G (s) =C1s + C2(s2 + b2)
+C3
s − s3+ · · ·+ Cn
s − sn(35)
y(t) = L−1{G (s)} = C1 cos(bt) +C2bsin(bt) +C3e
s3t + ...+Cnesnt (36)
Jeżeli s3, . . . , sn < 0, to układ jest na granicy stabilności, w którym ustalająsię drgania niegasnące (funkcje okresowe nie mają czynnika ekspotencjal-nego).
dr inż. Jakub Możaryn Podstawy Automatyki

Brak stabilności (granica stabliności)
Rysunek 8: Położenie pierwiastków równania charakterystycznego napłaszczyznie liczb zespolonych s
dr inż. Jakub Możaryn Podstawy Automatyki

Stabilność
Podsumowując:
Układ jest stabilny asymptotycznie, jeżeli jego równaniecharakterystyczne układu ma pierwiastki rzeczywiste ujemne lubzespolone o ujemnych częściach rzeczywistych.
Układ ten jest stabilny nieasymptotycznie jeżeli jego równaniecharakterystyczne oprócz pierwiastków rzeczywistych ujemnych lub oujemnych częściach rzeczywistych ma jeden pierwiastek zerowy.
Układ ten jest niestabilny jeżeli jego równanie charakterystycznema więcej niż jeden pierwiastek zerowy lub pierwiastkirzeczywiste dodatnie lub zespolone o dodatnich częściachrzeczywistych.
Układ jest na granicy stabilności (generuje drgania niegasnące)jeżeli równanie charakterystyczne układu nie ma więcej niż jednegopierwiastka zerowego i nie ma pierwiastków rzeczywistych dodatnichlub zespolonych o dodatnich częściach rzeczywistych, natomiast mapierwiastki zespolone o zerowych częściach rzeczywistych.
dr inż. Jakub Możaryn Podstawy Automatyki

Stabilność - kryteria stabilności
Do oceny stabilności układów liniowych wystarczy znajomość roz-kładu pierwiastków równania charakterystycznego układu na płasz-czyźnie zmiennej zespolonej s.
Problemy, które się pojawiają przy tej metodzie
obliczanie pierwiastków równań wyższych rzędów nie jest łatwe,
nie zawsze znane jest równanie charakterystyczne układu.
Inne metody określania stabilności – tzw. kryteria stabilności, które niewymagają wyznaczania wartości pierwiastków równania charakterystycz-nego:
kryteria analityczne (Hurwitza, Routha),
kryteria graficzne (kryterium Michajłowa, metoda Evansa),
kryteria graficzno–analityczne (kryterium Nyquista, rozkład D).
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Hurwitza
Kryterium Hurwitza
Kryterium Hurwitza umożliwia sprawdzenie, czy równanie algebraiczne do-wolnego stopnia ma wyłącznie pierwiastki o częściach rzeczywistych ujem-nych. Zastosowanie jego ograniczone jest do stacjonarnych liniowych ukła-dów o parametrach skupionych (LTI) i transmitancji danej w postaci ana-litycznej.
Równanie algebraiczne stopnia n o stałych rzeczywistych współczynnikach
and (n)y(t)
dt(n)+ an−1
d (n−1)y(t)
dt(n−1)+ · · ·+ a1
dy(t)
dt+ a0 (37)
ma wszystkie pierwiastki ujemne, lub o ujemnych częściach rzeczywistych,jeżeli są spełnione dwa warunki, zwane warunkami Hurwitza.
1 WARUNEK I: Wszystkie współczynniki a0, a1, . . . , an, tegorównania są różne od zera i są jednakowego znaku,
2 WARUNEK II: Wszystkie wyznaczniki minorów głównych tzw.macierzy Hurwitza ∆n są większe od zera
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Hurwitza
Macierz Hurwitza
Macierz Hurwitza ma następującą postać
∆n =
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
an−1 an 0 − 0 0 0an−3 an−2 an−1 − 0 0 0an−5 an−4 an−3 − 0 0 0− − − − − − −0 0 0 − a2 a3 a40 0 0 − a0 a1 a20 0 0 − 0 0 a0
∣∣∣∣∣∣∣∣∣∣∣∣∣∣n×n
(38)
Dla warunku II, wystarczy policzyć wyznczniki minorów 2, . . . , n − 1.
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Hurwitza- przykład 1
Wyznaczyć macierz Hurwitza dla równania czwartego stopnia
a4s4 + a3s
3 + a2s2 + a1s + a0 = 0 (39)
∆4 =
∣∣∣∣∣∣∣∣a3 a4 0 0a1 a2 a3 a40 a0 a1 a20 0 0 a0
∣∣∣∣∣∣∣∣ (40)
Jego podwyznacznikami głównymi są:
∆2 =
∣∣∣∣ a3 a1a4 a2
∣∣∣∣ (41)
∆3 =
∣∣∣∣∣∣a3 a1 0a4 a2 a00 a3 a1
∣∣∣∣∣∣ (42)
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Hurwitza - przykład 2
Wyznaczyć zakres wartości wzmocnienia kp, zapewniający stabilną pracęukładu.
Gs =
1(Ts+1)4
1 + 1(Ts+1)4 kp
=1
(Ts + 1)4 + kp
(43)
Równanie charakterystyczne układu:
(Ts + 1)4 + kp = 0 (44)
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Hurwitza
Uwagi do kryterium Hurwitza
UWAGA 1: Możliwość wystąpienia stabilności nieasymptotycznej za-chodzi gdy w równaniu charakterystycznym stopnia n współczynnik a0 = 0(równanie ma jeden pierwiastek zerowy), natomiast pozostałe współczyn-niki są większe od zera.
Po podzieleniu stron równania charakterystycznego przez s, otrzymuje sięrównanie stopnia n − 1, w odniesieniu do którego należy zastosować kry-terium Hurwitza w celu sprawdzenia znaku pozostałych pierwiastków.
Jeżeli równanie to spełni warunki Hurwitza to oznaczać będzie, że układposiada jeden pierwiastek zerowy a pozostałe pierwiastki są ujemnelub mają części rzeczywiste ujemne i sprawdzany układ jest stabilnynieasymptotycznie.
UWAGA 2: Kryterium Hurwitza nie umożliwia badania stabilności układuz opóźnieniami.
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Nyquista
Kryterium Nyquista umożliwia ocenę stabilności układu zamkniętego napodstawie charakterystyk częstotliwościowych układu otwartego.
Transmitancja układu zamkniętego
GZ (s) =G1(s)
1 + G1(s)G2(s)(45)
Transmitancja układu otwartego
G0(s) = G1(s)G2(s) (46)
dr inż. Jakub Możaryn Podstawy Automatyki

Uproszczone kryterium Nyquista
Uproszczone kryterium Nyquista
W przypadku kiedy równanie charakterystyczne układu otwartego niema pierwiastków dodatnich lub o dodatnich częściach rzeczywistych (możemieć dowolna liczbę pierwiastów zerowych), układ zamknięty jest stabilny,jeżeli charakterystyka amplitudowo – fazowa układu otwartego nie obej-muje punktu o współrzędnych {–1, j0}.
’Nie obejmuje’ oznacza, że przy przesuwaniu się wzdłuż charakterystyki wkierunku wzrastających pulsacji, punkt {–1, j0} pozostaje po lewej stroniecharakterystyki
UWAGA: Uproszczone kryterium Nyquista nie obejmuje przypadków kiedyrównanie charakterystyczne układu otwartego, oprócz ujemnych lub zero-wych, ma także pierwiastki dodatnie lub o dodatnich częściach rzeczywi-stych.
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Nyquista
Cechy kryterium Nyquista
charakterystyka częstotliwościowa układu otwartego, napodstawie której określana jest stabilność układu zamkniętego, możebyć łatwo wyznaczana analitycznie lub doświadczalnie,
kryterium umożliwia nie tylko stwierdzenie faktu stabilności, lecztakże umożliwia projektowanie układu o określonychwłaściwościach dynamicznych,
kryterium umożliwia badanie stabilności układów zawierającychelementy opóźniające.
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Nyquista
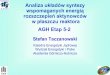
Rysunek 9: Charakterystyki aplitudowe-fazowe układu otwartego w przypadku1) stabilnego układu zamkniętego, 2) niestabilnego układu zamkniętego
Warunki Nyquista
M(ω−π) < 1; gdzie ω−π : ϕ(ω−π) = −π (47)
ϕ(ωp) > −π; gdzie ωp : M(ωp) = 1 (48)
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Nyquista - przykłady charakterystyk układówstabilnych
Rysunek 10: Przykłady charakterystyk amplitudowo – fazowych układówotwartych, odpowiadających: stabilnym układom zamkniętym - charakterystykanie obejmuje punktu {−1, j0}
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Nyquista - przykłady charakterystyk układówniestabilnych
Rysunek 11: Przykłady charakterystyk amplitudowo – fazowych układówotwartych, odpowiadających: niestabilnym układom zamkniętym -charakterystyka obejmuje punkt {−1, j0}
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Nyquista
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Nyquista - charaktersytyki Bodego
Warunki Nyquista dla charakterystykamplitudowej i fazowej
L(ω−π) = 20 logM(ω−π) < 0;(49)
ϕ(ωp) > −π; gdzie L(ωp) = 0 (50)
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Nyquista - zapas modułu i zapas fazy
Zapas modułu
∆M =1
M(ω−π)(51)
∆L = −20 logM(ω−π) (52)
Zapas fazy
∆ϕ = π + ϕ(ωp) (53)
Zapas modułu i fazy układu sta-bilnego ma wartości dodatnie.
PRAKTYKA PRZEMYSŁOWA
30 deg < ∆ϕ < 60 deg (54)
2 ¬ ∆M ¬ 4→ 6dB ¬ ∆L ¬ 12dB(55)
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Nyquista - przykład 1
Stosując kryterium Nyquista zbadać stabilność układu
G0(s) =1
s3 + 3s2 + s + 1(56)
dr inż. Jakub Możaryn Podstawy Automatyki

Kryterium Nyquista - przykład 2
Stosując kryterium Nyquista zbadać stabilność układu i wyznaczyćzapasy stabilności.
G0(s) =10
(0.1s + 1)(0.001s + 1)
10.3s
(57)
dr inż. Jakub Możaryn Podstawy Automatyki

Podstawy Automatyki
Wykład 5 - stabilność liniowych układów dynamicznych
dr inż. Jakub Możaryn
Instytut Automatyki i Robotyki
Warszawa, 2019
dr inż. Jakub Możaryn Podstawy Automatyki