Embed Size (px)
DESCRIPTION
Równania fizyczne kompozytów włóknistych w układzie osiowym i nieosiowym w oparciu o „Podstawy mechaniki kompozytów włóknistych” (rozdz. 2 i 3), German J. Wykonał: Jakub Lewandowski. Min. ciężar, maks. wytrzymałość Źródło: Wykład habilitacyjny J. Germana. rura z fibrobetonu (PL, PK). - PowerPoint PPT Presentation
Citation preview

Wykonał: Jakub Lewandowski
Równania fizyczne kompozytów włóknistych
w układzie osiowym i nieosiowym
w oparciu o „Podstawy mechaniki kompozytów włóknistych” (rozdz. 2 i 3), German J.

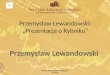
Min. ciężar, maks. wytrzymałośćŹródło: Wykład habilitacyjny J. Germana
samolot kompozytowy I-23 (GFRP, PL)
rura z fibrobetonu (PL, PK)
Chevrolet Corvette Z51( CFRP, GFRP…)
wzmocnienia belki teowej (CFRP)

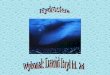
Struktura laminatu kompozytowegoŹródło: Wykład habilitacyjny J. Germana
laminat kompozytowylaminat kompozytowy
warstwa kompozytowawarstwa kompozytowa
matryca (osnowa)
włókna

Materiał transwersalno izotropowy
Postać macierzy sztywności materiału transwersalno izotropowego o płaszczyźnie izotropii 2,3
3
2

Płaski stan naprężenia
5430

Jak wyznaczyć stałe?
Rozciąganie podłużne Rozciąganie poprzeczne Ścinanie
121,E 212 ,E 12G
Można określić:

Jak wyznaczyć stałe?
Macierz podatności ma więc postać:
4 stałe są niezależne, gdyż:
- podłużny moduł Younga1E- poprzeczny moduł Younga2E
- moduł ścinania
12
21
12G
- większy współcz. Poissona
- mniejszy współcz. Poissona
Macierz sztywności otrzymuje się poprzez odwrócenie macierzy podatności
Macierz -1

Konfiguracja nieosiowaPrzekształcenia matematyczne
T=
=[ T ]-1 =[ T ]-1

Wyznaczenie macierzy sztywnościPrzekształcenia matematyczne
Macierz sztywności w konfiguracji nieosiowej ma
postać taką jak dla materiału
anizotropowego – brak zerowych
elementów.
sprzężenie normalne
sprzężenie styczne

Przykład – zależność stałych inżynierskich od orientacji włókien
epoksyd
grafit GPaE 2201
GPaE 9.62 GPaG 8.412
25.012
?,,, xyxyyx GEE
α
α
x
y
1
2
Macierz podatności w konfiguracji osiowej:
S =

Macierz sztywności w konfiguracji osiowej:
Macierz sztywności w konfiguracji nieosiowej:
Macierz podatności w konfiguracji nieosiowej:
0.070191 cos2 0.00707345 cos4 0.0818099 0.00707345 cos4 0.00820982 256 .222 s in4 25 .8206 s in6 128 .111 s in8 25 .8206 s in10 103 .282 s in cos 3650 .36 cos2 3650 .36 cos6
0.00707345 cos4 0.00820982 0.070191 cos2 0.00707345 cos4 0.0818099 256 .222 s in4 25 .8206 s in6 128 .111 s in8 25 .8206 s in10 103 .282 s in cos 3650 .36 cos2 3650 .36 cos6
256 .222 s in4 25 .8206 s in6 128 .111 s in8 25 .8206 s in10 103 .282 s in cos 3650 .36 cos2 3650 .36 cos6 s in2 s in4 512 .445 s in cos 51 .6412 s in4
1825 .18 cos2 1825 .18 cos6 0.0282938 cos4 0.18004GPa
1
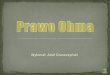
Przykład – zależność stałych inżynierskich od orientacji włókien

Ze względu na sprzężenia styczne i normalne macierz ma postać:
Stąd można określić:
)(
)(
)(
)(
xy
xy
y
x
G
E
E
10 ° 20 ° 30 ° 40 ° 50 ° 60 ° 70 ° 80 ° 90 °
5
10
15
20
25
30
10 ° 20 ° 30 ° 40 ° 50 ° 60 ° 70 ° 80 ° 90 °
0.2
0.4
0.6
0.8
1.0
1.2
1.4
α
α
2E
Ex
2E
Ey
12G
Gxy
12 xy
Przykład – zależność stałych inżynierskich od orientacji włókien