-
7/21/2019 Zanatta Alan Ferreira
1/53
-
7/21/2019 Zanatta Alan Ferreira
2/53
-
7/21/2019 Zanatta Alan Ferreira
3/53
TrueTime em seu projeto.
Palavra-chave:Controle via rede, Protocolo CAN, Mo tor de
corrente contnua
-
7/21/2019 Zanatta Alan Ferreira
4/53
NDICE
I)
RESUMO..................................................................................................................................
II)
INTRODUO............................................................................................................................
III)
REVISOBIBLIOGRFICA......................................................................................................10
III.1)SISTEMASDECONTROLEVIAREDENCS.........................................................10
III.2)METODOLOGIASDECONTROLEPARANCS........................................................2
IV)
REVISOCONCEITUAL..........................................................................................................14
IV.1)
MODELOSDINMICOSEFUNOTRANSFERNCIA.............................................
IV.2) SISTEMASDECONTROLE(MALHAABERTAEMALHAFECHADA)
.............................
IV.3)
ENCODERS..........................................................................................................................
IV.3.1)
ENCODERINCREMENTAL..................................................................................15
IV.4)
PROTOCOLOCAN...............................................................................................................16
IV.4.1)
FORMATODASMENSAGENS...........................................................................18
IV.4.2)
FERRAMENTATRUETIME...................................................................................19
V)
CONSTRUAODOMDULODEMOTORDC.............................................................23
V.1)
MOTORDECORRENTECONTNUA...........................................................................24
V.2)
ACIONAMENTODOMOTORDC..................................................................................24
V.3)
LEITURADOENCODER....................................................................................................25
V.4)
PROGRAMAODOPIC.................................................................................................28
VI)
MODELAGEMMATEMTICA...............................................................................................32
VI.1)
FUNOTRANSFERNCIA-MOTORDC................................................................32
VI.2)
FUNAOTRANSFERNCIA-MOTORMAXON.......................................................5
VII)
VERIFICAODOMODELO.................................................................................................36
-
7/21/2019 Zanatta Alan Ferreira
5/53
CONCLUSES.........................................................................................................................
X)
DIFICULDADESENCONTRADAS.......................................................................................49
XI)
ANLISEDOSRESULTADOS...............................................................................................51
XII)
REFERNCIASBIBLIOGRFICAS.....................................................................................52
LISTA DE FIGURAS
Fi1Esdusdcvr e NCS) .
Figura2.NCScomEstruturaDireta(ModificadodeTipsuwaneChow,2003)..........................................10
Figura3.NCScomEstruturaHierrquica(ModificadodeTipsuwaneChow,2003)................................11
Figura4.EsquemadeumEncoderdeDuasTrilhas...................................................................................
Figura5.SinalproduzidopeloEncodernosCanaisAeB...........................................................................
Figura6.NveisEltricosdoProtocoloCAN...........................................................................................
Figura7.MensagemCAN2.0A.............................................................................................................
Figura8.MensagemCAN2.0B.............................................................................................................
Figura9.BlocosdaBibliotecaTrueTime...............................................................................................
Figura10.BancadadeMotordeCorrenteContnua...................................................................................
Figura11.EspecificaeseDesenhoTcnico-MotorRE-max24..............................................................24
Figura12.EsquemaCILMD18200.........................................................................................................
Figura13.FotodoDriverPWM............................................................................................................Figura14.EsquemaHCTL2017-A00.......................................................................................................
Figura15.EsquemticodoCircuitodaInterfaceCANPadro(BRAZet.al.2004)....................................29
Figura16.ImagemdaInterfaceCANImplementada(Sousa,2002)...........................................................30
Figura17.Diagrama-ProgramaoPIC.................................................................................................
Figura18.EsquemaMotordeCorrenteContnua.......................................................................................
Figura19.DiagramadeBlocos-SistemaemMalhaAberta........................................................................3
Figura20.Respostaaodegraude3V....................................................................................................
Figura21.Respostaaodegraude6V....................................................................................................
Figura22.Respostaaodegraude12V..................................................................................................
Figura23.DiagramadeControledoMotornaPlataformaLabview.............................................................39
Figura24.DiagramadeBlocos-SistemaemMalhaFechadacomControleProporcional........................39
-
7/21/2019 Zanatta Alan Ferreira
6/53
I) RESUMO
Ap-sorrdTrdCood eCusot Simulao,
Anlise e Controle de Motor de Corrente Contnua via Rede CAN em
Sistemas de
Manufatura.
Este trabalho busca estudar a aplicao de NCS via rede CAN em
sistemas de
manufatura e dar suporte ao projeto de pesquisa FAP ESP,
Processo n2/0. O
mdulo de motor de corrente contnuo proposto e des envolvido
neste trabalho integrar a
bancada de testes de NCS em desenvolvimento no projeto de
pesquisa citado.
Para a realizao deste trabalho, diversas ferramentas
computacionais foram
estudadas como: programao em Matlab e Matlab Simulink, programao
de
microprocessadores em MPLAB, desenvolvimento de sistemas de
controle em Labview;e
tambm vrios conceitos como:modelagem matemtica de sistemas
mecnicos e eltricos,
protocolo CAN, controles via redes CAN, dentre outros.
A construo do mdulo de motor de corrente contnu a, sua integrao
com a rede
CAN, o desenvolvimento, aplicao e estudo de controles via rede e
a identificao e
estudo de possveis erros na execuo do controle so os objetivos
deste trabalho. O
mdulo construdo tambm ficar disponvel para out ros experimentos
e para o aprendizado
desta tecnologia.
-
7/21/2019 Zanatta Alan Ferreira
7/53
II) INTRODUO
Asatdcoec opapinsdminl tsocpc
c o c o d c d c o a c s e a d
s. Es t d ct e c l n e no f o n
r d d d s d c l c m cdfddseb c(YANG,20).
Nosdmaaiod adri
pmaenafeac fdsrot
eocdioemo(MOYNE TIL BURY20). Est drcsvfra apsand
co e s e e a e ao e c (LIAN,
MOYNE TILBURY201).
Aperdsdcd uddosdu n a p a uo d r i t. Ne a o
c e a p f f s e so c p u r d
co. Es t d io e s i o a m d
csofsurdco cmnFi1,ts
ddSidCovRe(NCS - Networked Control System) (YANG,
2).
-
7/21/2019 Zanatta Alan Ferreira
8/53
Controller
Area Network), Profibus e Foundation Fieldbus (MONE
&TILBURY, 2).
No importando o tipo de protocolo de comunicao utilizado, o
desempenho e a
estabilidade de um NCS sempre so afetados pela presena da rede
de comunicao e de
fatores degenerativos como a discretizao e os atrasos de
comunicao (delay) entre os
sensores, atuadores e controladores do sistema (BAILLIEUL
&ANTSAKLIS, 2). Esses
atrasos de comunicao so resultados do compartilhamento do meio
de comunicao com
outras malhas de controle como tambm do tempo de p rocessamento
requerido para
codificao dos sinais e computao dos dados (LIAN , MONE
&TILBURY, 2).
Buscando minimizar esses efeitos causados pela presena da rede
de comunicao,
diversas metodologias de controle tm sido desenvol vidas
especificamente para NCS, a
partir de tcnicas de controle avanadas, como pode ser visto em
Tipsuwan &Chow (2).
No entanto, por causa da variabilidade e da dificuldade de se
calcular esses atrasos, os
NCS podem apresentar caractersticas de sistemas variantes no
tempo, tornando essas
-
7/21/2019 Zanatta Alan Ferreira
9/53
I I I) REVISO BIBLIOGRFICAAspaeNCS tmfp edldt. Um
n p r c a al d in d s a d co n
deedsbcod sdfp
sods(CERVIN ea., 20 TOR NGREN e a.,20). E o n
ddmdpec ldNCS pcoe
d a d co m o d e g a e d
s(TIPSUWAN CHOW203;HESPANHA,NAGHSHTAB RIZI XU,20).
III.1) SISTEMAS DE CONTROLE VIA REDE NCS
Um g tn n s d m i u a io d
co e c d vr nv d p s d m. Umsoq
v s a p i a uo d t l d s d c
d d v r d c o( YANG,20), tm c d s d
c v r (NCS). De a c Ti e Ch (203),oNCS ps
c e d g e d e e t hr. Naed
m n Fi 2, o c e a p f m f a e l
s e so c d p u r d co f u
m d c r. O s d c e i p o a as d u
mevreosa oasddpera
iopoctmta ioasdr.
-
7/21/2019 Zanatta Alan Ferreira
10/53
deadline
-
7/21/2019 Zanatta Alan Ferreira
11/53
III.2) METODOLOGIAS DE CONTROLE PARA NCS
Re m t d p tm a s m d
pecpNCSsesdm u. Ummdc
rpmoedad coeuNCS,m
s d e g s e. Um r eo d a m
aeTi Ch(203) eLi Fa( 20). Eneamd
podg(TIPSUWAN,203) uut cdaogdu
c d u NCS p c o e d a d co. Ne
mogsoadac oedsddsc
padr. Ho Ki(20) au mm dpo d
t d a q s c o t e d a d
dduNCS,moeda tndds.
Pa d tc d c c b s e c PID
(POHJOLA, 20), c r (CLOOSTERMAN e a l., 20), c r
l qt (LQR) (ZHANG HUA-JING, 20) e c p b e
m (ALLDREDGE,20) eo e a m u a n d d
m. De f a s l c a i d a d co n
-
7/21/2019 Zanatta Alan Ferreira
12/53
-
7/21/2019 Zanatta Alan Ferreira
13/53
IV) REVISO CONCEITUAL
A ro c d a m dm s do e dd fo tn d s fs s a d c e m a e
f f d e p CAN e f TrTi d MatLab
Simulink foram essenciais para o desenvolvimento dos trabalhos
deste projeto.
IV.1) MODELOS DINMICOS E FUNO TRANSFERNCIA
A dm d s p s e c o e t d c e
fo d t d g q eo r s c p d u q f
i s p e f c o c e d d m
dm. (FELICIO,20).
A fo d tn d u s d ee d i n
t d c a ro d t d La d sd (fo r)
patdLade(foe xo) sahtdqt
aceison. (OGATA,193).
Us u-s d l fs q d e o s p s o o
c d ee l q m s c r o s o m
mt. Po a fo tn p s o a-s a
TrdLaacdee.
irqocdfot nnesaso
rasdeedl eint.
A
-
7/21/2019 Zanatta Alan Ferreira
14/53
IV.3) ENCODERSEn so t d m c d c o d
aolepdsd.
Es s p i u o m d o (ms) p
f n e e r o. Ta d s e m e u f d l e uf. O d c e s o s e t q p
o
b a ro d l p d f p l f. A crod
-
7/21/2019 Zanatta Alan Ferreira
15/53
-
7/21/2019 Zanatta Alan Ferreira
16/53
-
7/21/2019 Zanatta Alan Ferreira
17/53
IV.4.1) FORMATO DAS MENSAGENS
ExdfdmnpCAN :
CAN 2.0A Me c i d 11 b. pv t a 2048
meurcef. A Fi7 aoqdm
dCAN 2.0A.
-
7/21/2019 Zanatta Alan Ferreira
18/53
IV.4.2) FERRAMENTA TRUETIME
A fTrTidpDe t dCoAutd
UndLunSuc utdMAT LAB/Siupfa
so d oo e c t d u mNCS o u s dd
c ml c o e t r (CERVIN e a., 203). Es
f cb pub adSics b
s o b d kernel (TrueTime Kernel), dois blocos de rede (com fio
TrueTime
Network e sem fio TrueTime Wireless Network), dois blocos de
transmisso de
mensagens (envia mensagem ttSendMsg e recebe mensagem ttGetMsg)
e um bloco de
-
7/21/2019 Zanatta Alan Ferreira
19/53
kernel. Entre essas
funes pode-se citar a converso AD/DA, envio e re cebimento de
mensagens, criao e
gerenciamento de tarefas, interrupes, temporizado res e
monitorao de eventos. Os
blocos e funes da biblioteca da ferramenta TrueTi me se conectam
diretamente aos blocos
j existentes nas bibliotecas disponveis no Simuli nk,
facilitando sua utilizao.
Figura 9. Blocos da Biblioteca TrueTime
Os blocos de rede e de kernel da biblioteca so baseados em
eventos, podendo ser
eventos internos ou externos, os quais determinam a execuo de
suas atividades. Eventos
internos so relacionados ao tempo, como por exemplo, o tempo
definido terminou, a tarefa
foi executada ou a mensagem foi transmitida. Eventos externos so
relacionados com
interrupes ou fatos externos aos blocos como, por exemplo, uma
mensagem foi detectada
na rede ou a velocidade do motor ultrapassou a referencia.
Um modelo da ferramenta TrueTime pode conter diversos blocos,
como por exemplo
mais de um bloco de rede (simulando um sistema com mais de uma
rede) e um mesmo
-
7/21/2019 Zanatta Alan Ferreira
20/53
Schedule e Monitors) (CERVIN, OLIN &
HENRIKSSON, 2). Internamente no bloco de kernel, estruturas como
filas, memrias,
buffers, temporizadores esto implementados e so utilizados nas
simulaes. A
comunicao via rede realizada atravs de uma ent rada de recepo de
mensagens da
rede (Rcv), uma sada de envio de mensagens para a rede (Snd).
Obloco de kernel contm
ainda uma entrada (E) e uma sada (P) que so utilizadas
juntamente com o bloco de
bateria (TrueTime Battery).
IV.4.2.2) BLOCOS DE REDE
Os b d r d f tm so b e e e s o
mdaamdcoat modmnre
tdpr tod mdacotd
r o p e (CERVIN, OHLIN HENRIK SSON, 20). Ca m
t n r cm ie s o d o d o e d d dm d d p ur (mo r l s d c) e
tdm. Ouieef scsdtr
c p e deadline das mensagens so opcionais e definidas de acordo
com o
protocolo escolhido.
IV.4.2.3) BLOCOS DE TRANSMISSO DE MENSAGENS
Os b d to d m (e e r b) so u p
-
7/21/2019 Zanatta Alan Ferreira
21/53
-
7/21/2019 Zanatta Alan Ferreira
22/53
V) CONSTRUAO DO MDULO DE MOTOR DC
Cooodrodedc tdpodmd
ccnfcdumdc rpapdNCS,aq
a nF i1 0. Es m d c cd p u m DC, u
epmodpoudda mPWM,ucend
l d e u f A C /DC p a o d d e c
ef p a r CAN. O o d NCS a ro d e d
cdpo(rneg) d pur.
Ossde(sdcPWM pa idmDC) esd
(modpodhasde) d ssotasd
rCAN dpsqaiodm adc rCAN ff
u-sdiCAN da t.
-
7/21/2019 Zanatta Alan Ferreira
23/53
-
7/21/2019 Zanatta Alan Ferreira
24/53
-
7/21/2019 Zanatta Alan Ferreira
25/53
-
7/21/2019 Zanatta Alan Ferreira
26/53
SEL, OEe RST.
Cm o pino OE em nvel lgico alto, no haver sinal de leitura nas
entradas dos
pinos D D pois ele est ligado s portas N internas do contador,
desabilitando a
contagem dos bits.Lgo,para comear a leitura dos dois bytes mais
e menos significativos,
tal pino dever permanecer em nvel lgico baixo. O pino
SELseleciona a leitura dos bits
mais e menos significativos.Cm o pino SELem baix a,os bits mais
significativos so lidos
primeiramente e em alta,os bits menos significativ os so
lidos,montando os dois bytes.
O pino 5 o RST eset)que ativado em baixa,porm tem sua lgi ca
invertida na
entrada com uma porta NOT,assim o pino tem que ser mantido em
nvel lgico baixo para
funcionar e em alta para reiniciar o CO pino 2 C a entrada do
clock recisa ser 3
vezes maior que o maior sinal do encoder) se o clo ck no for 3
vezes maior o sinal de
sada no ser confivel,pois pode haver perda de sinal durante a
leitura do encoder.
Os pinos 6 e 7 ntradas dos canais A e B respecti vamente) so
conectados s
sadas A e B do encoder, os quais recebem os sinais em quadratura
com defasagem de
9Dsta forma,pode-e conhecer o sentido de rot ao do encoder.
Os pinos 1e 9ao 1correspondem ao Da Dque se referem a um bit de
sada do
sinal lido, montando primeiramente o MSB e, posteri ormente, o
LSBO pino 8 e o
pino 1 D ) so a referncia e alimentao, respectivamente. N
projeto, o
-
7/21/2019 Zanatta Alan Ferreira
27/53
V.4) PROGRAMAO DO PIC
Um r CAN c p c d d o c (s e
a), i d io (ns CAN o EC U) e b. SOUSA (202)
a u l d c e c s en p d
d rCAN, s s u i po p a io d d
qfpaeaoeB RAZea. (204).
A r CAN d e f m u -s d i. O
et d c d i CAN i n m n Fi 15
cbptsmdiq uso
1. Tr CAN: md rv p a o d nv d to e
cdn CAN edbCAN;
2. TrRS232:md rv p a ao d nv d to e
c d n CAN e a i RS232, b e u c t USART
(UnSy/AsReTr s);
3. Mi c Co CAN: md c sd p CPU, mr
pcipod secCAN,q
o md c d io e d c d o p u p
-
7/21/2019 Zanatta Alan Ferreira
28/53
-
7/21/2019 Zanatta Alan Ferreira
29/53
-
7/21/2019 Zanatta Alan Ferreira
30/53
-
7/21/2019 Zanatta Alan Ferreira
31/53
VI) MODELAGEM MATEMTICA
A mmtsacf podd
cepasods.
VI.1) FUNO TRANSFERNCIA - MOTOR DC
O mdccncoun etpsr
epFi18.
Fi18. EsModCoCon
UsaLedKidVooa seo
.(
TensoAplicadanosTerminaisdoMotor
ResistnciadaArmaduraCorrentedaArmadura
IndutnciadaArmadura
-
7/21/2019 Zanatta Alan Ferreira
32/53
(
Sendo6
ConstanteContraEletromotrizdoMotorngulodeSadadoMotor
AplicandoaTransformadadeLaplace6
2(
Substituindo 2(em 7(6
9(
Rearranjando6
(
Sendo6
MomentodeInrciadoMotor
-
7/21/2019 Zanatta Alan Ferreira
33/53
ngulodeSadadaReduo
CoeficientedeAtritoEquivalenteSubstituindo 8(em (6
(
Temosque6
.4(
Comoresultadodainteraoentreoscamposmagnti
cos)umacorrenteeltricaflui
atravsdasespiraseumtorque)proporcionalacorrenteaplicada)gerado
..(Sendo6
EficinciadoMotor
ConstantedeTorquedoMotor
Substituindo .4(e ..(em (6
.7(
AplicandoaTransformadadeLaplace6
+
+ .(Substituindo .4(em (6
-
7/21/2019 Zanatta Alan Ferreira
34/53
+ + + ( + ) VI.2) FUNAO TRANSFERNCIA - MOTOR MAXON
A fo tn o n tp a e t u ro e a
to a n t d m e a po d sd d ro e fo d
pmcsdmedro. E svdacome
of.
Noptomufdf iMam3517.
Tam uce+m+r cospm
MoMoRE-m24,o22203
4.17 1Kgm7
2.19 1Nms
.84 4.4 1Vsrad
.244NmA
.46H
8.47
ReduoPlanetaryGearheadGP22C
-
7/21/2019 Zanatta Alan Ferreira
35/53
VII) VERIFICAO DO MODELO
VII.1) RESPOSTA A ENTRADA DEGRAU
Ex s o u d r d co CAN, f r p
aardsraue demaec-l
c a s o d c f e Matlab/Simulink com o intuito de verificar a
acuracidade do modelo matemtico desenvolvido para o motor.
Osistema simulado em Matlab Simulink representad o pelo diagrama
de blocos da
Figura 1.
Figura 1. Diagrama de Blocos -Sistema em Malha Ab erta
Nos experimentos, trs diferentes tenses foram apl icadas no
motor:3V (Figura 2),
6V (Figura 2) e 1V (Figura 2).
-
7/21/2019 Zanatta Alan Ferreira
36/53
-
7/21/2019 Zanatta Alan Ferreira
37/53
VII.2) RESPOSTA A UM CONTROLE PROPORCIONAL
Um c p f d n p o Labview (Figura 2) e
experimentos foram realizados para analisar as respostas do
sistema real e compar-las
-
7/21/2019 Zanatta Alan Ferreira
38/53
-
7/21/2019 Zanatta Alan Ferreira
39/53
-
7/21/2019 Zanatta Alan Ferreira
40/53
-
7/21/2019 Zanatta Alan Ferreira
41/53
VIII) SISTEMA DE CONTROLE VIA REDE CAN
VIII.1) PROJETO E SIMULAO
Um c p d f d o e i n s
as d r d co CAN. Ex f r r p a a
r d s r e c-l c a s ao d crc o
Toolbox TrueTime do Matlab/Simulink.
A utilizao de ferramentas de simulao e projeto de NCS necessria
para o
desenvolvimento de sistemas de controle, pois permite ao
projetista avaliar a dinmica do
sistema de controle antes de sua implementao real, reduzindo
tempo e custos de projeto
e desenvolvimento.
A ferramenta TrueTime (http://www.control.lth.se/tr uetime) um
Toolbox do
Matlab/Simulink usado para facilitar a simulao da operao e do
comportamento temporal
de NCS e de sistemas embarcados ou distribudos com mltiplos
controles operando em
tempo real. A ferramenta consiste de uma biblioteca de blocos do
Simulink, basicamente
com um bloco computacional de kernel e blocos de rede de
comunicao, como mostrado
na Figura 2, e uma coleo de arquivos MEXdo Matl ab.
-
7/21/2019 Zanatta Alan Ferreira
42/53
TrueTime.
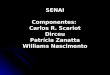
Figura 2. NCS para Controle de um Motor DC impleme ntado na
Ferramenta TrueTime
Na Figura 2, o termo Transfer Function a funo transferncia
obtida a partir da
modelagem matemtica apresentada em sees anterior es deste
relatrio com as
apropriadas substituies das variveis pelos parm etros reais do
motor.
Para o NCS via rede CAN projetado, foi definida uma velocidade
de 2Kbits/s para a
rede e mensagens de 2 bytes para os dados transmiti dos. Em
relao aos parmetros
definidos para as ECUs do NCS, a ECU 1funciona com o gerador de
carga para a rede. A
ECU 2(atuador) responsvel por receber a mensage m CAN e enviar o
sinal de controle
(u) convertido (/A) para o processo A ECU (sens or) responsvel
pela leitura e
-
7/21/2019 Zanatta Alan Ferreira
43/53
VIII.2) CONTROLE REAL VIA REDE CAN
Osmcsniac o Toolbox TrueTime do Matlab
foram implementados no sistema real atravs de uma rede CAN
administrada por software
desenvolvido na plataforma LabView. O esquemtico de tal
implementao pode ser
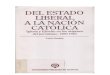
visualizado na Figura 3.
Figura 3. Esquemtico Controle via Rede CAN
No NCS desenvolvido, as informaes do sensor refer entes ao nmero
de pulsos do
encoder que traduzem a posio do motor so interpr etadas pela ECU
e enviadas
periodicamente para o controlador via mensagens na rede CAN.
Ocontrolador, neste caso,
um computador pessoal ue se comunica com a rede CAN atravs de
uma placa PC
-
7/21/2019 Zanatta Alan Ferreira
44/53
VIII.3) COMPARAO ENTRE AS RESPOSTAS DA SIMULAO E DA
IMPLEMENTAO REAL DO NCS VIA REDE
A respostas obtidas do controle simulado com o Toolbox TrueTime
do
Matlab/Simulink e as respostas do sistema real podem ser
observadas na Figura 3, na
Figura 3e na Figura 3.
Figura 3. Controle PD(K=e Td=.0) via rede CA N (simulado e
real)
-
7/21/2019 Zanatta Alan Ferreira
45/53
-
7/21/2019 Zanatta Alan Ferreira
46/53
Toolbox TrueTime do Matlab/Simulink com as corretas
parametrizaes para a simulao da rede de comunic ao CAN,
descrevendo-a de forma
precisa.
-
7/21/2019 Zanatta Alan Ferreira
47/53
IX) CONCLUSES
O d d NCS , e u p l m q
edamdsfsp dpsvopso
dcvrefpio rdNCS.
Ne t t a e d f c p d e a
rdsserfo. A codpva
io d p d mde dNCS p eaq aao dNCS
crCAN pcdmdcc nn vv.
A uo d f d so e p d NCS nr p o
d d s d c p p t a p a a dm d
sdcadsior ,rtecdp
ed.
Tam c o i d s a a en d f d so
TrueTime do Matlab/Simulink, esta foi utilizada neste trabalho e
se mostrou precisa na
simulao da rede de comunicao CAN e do NCS, sendo indicada para a
utilizao no
desenvolvimento de sistemas de controle via rede.
-
7/21/2019 Zanatta Alan Ferreira
48/53
X) DIFICULDADES ENCONTRADAS
No p s d p d t d c oo d c u d
d e f n ao d m mt a so r. Os
a et e dm d m i n a r d se. Coa
m da d cd o e no o od t
d c o d c v-s e t a to u p m p
qesoaeismo vd026V fe.
A p d io p-s a e t so i e
p e t o e d f q u o m j e n
endeemadc isao.
Defp-s c o r d m l e d e e
v o m mt p m e no c a m d
adm.
O edfdPIC,dsr opecoc
o ce dd p eC p s epPIC tm
egdoeeoda.
A coasdrCAN,utd cpaa o ic
d t d co d c e o e d d p d co e
fdCAN edbdc oj e.
No s s d p d t d c no d c p
-
7/21/2019 Zanatta Alan Ferreira
49/53
-
7/21/2019 Zanatta Alan Ferreira
50/53
XI) ANLISE DOS RESULTADOS
A codmddccnesi nocurCAN f
f.
O m mt d f v e p m s uo p
tfrapdc ldmdccn.
A co d r d se d c l v rCAN d s
a c a r d c r d m s p v o u d
fTrTipsedcv r.
O d e vo d NCS v r CAN p r n t
c s v d ao e c d m d c cn.
Co t co o o d t d c oo d c aa e
ie s a io e vo d NCS so a a l
drr.
O md d c cn d n p o f i a u
p d t d NCS e d n p r d p FAPESP
03481-1 e p tm a ro d f o e e e e o
adt.
Cordttmstap coduacfn
9CoTetdDimCoeAp ae - DINCON2010- cott
Simulao, Anlise e Controle de Motor de Corrente Contnua
Utilizando um Sistema de
-
7/21/2019 Zanatta Alan Ferreira
51/53
XII) REFERNCIAS BIBLIOGRFICAS
ALLDREDGE,G. W. (20). PID aMoPrC oiaNeEn. Ma
d De o El En a Co Sc CASE
WeReUNIVERSITY130.,Au.BAILLIEUL,J.;ANTSAKLIS,P.J. (20). Coa
CoChiNeRe-Ti Sy. In Pr o t IEEE TECHNOLOG Y OF NETWORKED
CONTROLSYSTEMS,v. 9n. 1,p. 9-28Ja.BOSCH. (20). CAN 2.0 Sp Ve Ac o e
Se 20. Div eh.c.b.c.
CERVIN,A.;HENRIKSSON,D.;LINCOLN,B.;EKER,J.;ARZEN,K. E. (203). Ho
d c
t a p An a s o t u Ji a Tr IEEECoSyMav. 23,p. 16-30Ju.
CERVIN, A.; ARZEN, K. E.; HENRIKSSON, D.; LLUESMA,M.; BALBASTRE,
P.; RIPOLL, I.;CRESPO,A. (20). CoLoTiAnUs nTrTiaJiInProt20IEEE
CooCoAiCo SyDep. 1194-1194-6Oc.
CERVIN,A.;OHLIN,M.;HENRIKSSON,D. (20). SiaoNeCoSyUsTrTi. In Pr o
t 3r In W o Ne Co SyTotFaNaFrJu.
CLOOSTERMAN, M.; WOUW N. V.; HEEMELS, M.; NIJMEIJER, H. (20). Ro
St oNeCoSy wTi-vNe -iDe InPr o t45IEEE CooDe Cop. 49-49
,De.FELICIO,L. C. ModDimdSie EsdRe20Ed. Ri.
GAID,M. B.;CELA,A.;DIALLO,S.;KOCIK,R.;HAMOUCHE,R.;REAMA,A. (20).
PeEv o t Di Im o a C a Su Sy. In Pr o tIFAC WoPrDeaEm Sy.
CzReFe.GODOYE. P.;SOUSA,R. V.;PORTO,A. J. V.;INAMASU,R. Y. (20).
Apoa st s f t o o d c s b o CAN p. InProt5BrCooDy
mCoaThApSBMAC.
HESPANHA,J. P.;NAGHSHTABRIZI,P.;XU,Y. (20).A SuoReReiNeCoSyIEEE
ProtTe oNeCoSyv. 9 n. 1,p.138-162,Ja.HONG,S. H.;KIM,W. H. (20). Baa
nsiCAN p. IEEE ProCoThaApv. 147n. 1,p. 3 744.
HUO,Z.;FANG,H.;MA,C. (204). Nec ssota. InProt5WCooInCoaAu mWCICA
204,v. 2,p. 1319- 1322,Ju.
LEE,K. C.;LEE,S.;LEE,M. H. (203). Ref ylcon c s vPr-DP. IEEE
TroInEl ov. 5n. 4,p. 74-72,Au.
LEE,K. C.; LEE, S.; LEE, M. H. (204). Im i a PID t o n-b c
-
7/21/2019 Zanatta Alan Ferreira
52/53
-
7/21/2019 Zanatta Alan Ferreira
53/53