Embed Size (px)
DESCRIPTION
UPRAVLJANJE UČINSKIM PRETVARAČIMA. ZAŠTO UPRAVLJANJE ?. Ak. god. 2010/2011. Zagreb,. ZAŠTO UPRAVLJANJE ?. Do sada smo u predmetima iz područja učinske elektronike proučavali rad u periodi č kom ustaljenom stanju ( rad i pona š anje sklopa jednaki su od periode do periode ) . - PowerPoint PPT Presentation
Citation preview
FAKULTET ELEKTROTEHNIKE I RAČUNARSTVA
ZAVOD ZA ELEKTROSTROJARSTVOI AUTOMATIZACIJU 2010.
ZAŠTO UPRAVLJANJE ?
UPRAVLJANJE UČINSKIM PRETVARAČIMA
Ak. god. 2010/2011 Zagreb,
2
ZAŠTO UPRAVLJANJE ? Do sada smo u predmetima iz područja učinske elektronike proučavali rad u
periodičkom ustaljenom stanju (rad i ponašanje sklopa jednaki su od periode do periode).
Sada se treba suočiti s posljedicama neizbježnih poremećaja ili kvarova uslijed kojih rad sklopa odstupa od nazivnog.
Pod poremećajima podrazumijevaju se promjene i kolebanja u napajanju, teretu i parametrima sklopa, odstupanja ili perturbacije sklopnih trenutaka te događaji kao što su pokretanje i zaustavljanje. Vremenski tijek odstupanja od nazivnog ponašanja uslijed poremećaja naziva se dinamičko ponašanje sklopa.
Ukoliko takva odstupanja imaju beznačajne posljedice, što je rijetkost, korisnik može sa zadovoljstvom dopustiti rad sklopa bez korekcijskog djelovanja.
Najčešće se otkloni od nazivnih radnih uvjeta moraju spriječiti odgovarajuće projektiranim upravljanjem.
3
ZAŠTO UPRAVLJANJE ? Upravljački sklop ili kontroler ili kompenzator mora prvo omogućiti korisniku
jednostavan i udoban izbor nazivnih radnih uvjeta i drugo, automatski održavati nazivne radne uvjete prethođenjem ili kašnjenjem uklopnih i isklopnih trenutaka sklopki.
Regulirati dinamičko ponašanje znači održavati rad sklopa u blizini nazivnog, bez obzira na poremećaje ili kvarove.
U prvom dijelu kolegija započinjemo izgrađivati temelje analize dinamičkog ponašanja učinskih sklopova te temelje za projektiranje i primjenu upravljačkih sklopova za reguliranje ovoga dinamičkog ponašanja.
Pozornost je posvećena analizi i projektiranju upravljanja uporabom odgovarajućih dinamičkih modela.
Taj pristup omogućuje predviđanje ponašanja sklopa u različitim radnim uvjetima, zamišljanje mogućih struktura i parametara upravljačkog sklopa, planiranje simulacijskih istraživanja, razumijevanje ispitnih rezultata, prepoznavanje načina rada koji zahtijevaju daljnje istraživanje itd.
4
ZAŠTO UPRAVLJANJE ? Takav je pristup posebice važan u učinskoj elektronici jer je razvoj sklopova
mukotrpan i jer dosta košta, čak i na razini rasutog modela, k tome još treba pribrojiti troškove (a da se ne spominju opasnosti i katkad dim!) u slučaju stradavanja komponenti.
Analitička istraživanja moraju se, naravno, kombinirati s inženjerskim iskustvom i intuicijom, ispitivanjima te ostalim sastavnim dijelovima projektnog procesa da bi razvoj završio uspjehom.
Potreba za upravljanjem općenito, a poglavito u učinskoj elektronici, bit će jasnija nakon nekoliko ilustrativnih primjera u nastavku predavanja.
5
STRUKTURA UPRAVLJAČKOG SUSTAVA Svako upravljanje zasniva se, eksplicitno ili implicitno, na modelu kojim se
predviđa djelovanje poremećaja i upravljanja na ponašanje sustava. Predviđanje je uvijek u stanovitoj mjeri netočno zbog nesavršenosti modela. Upravljanje učinskim sklopovima obuhvaća definiranje željenih nazivnih
radnih uvjeta te potom ostvarenje upravljačkog sklopa kojim se učinski sklop održava u blizini tih nazivnih radnih uvjeta unatoč poremećajima i nesavršenosti modela.
Kod jednostavnog upravljanja bez povratne veze upravljački sklop tijekom rada ne dobiva nikakve informacije o sustavu, no može se projektirati na osnovi prethodnih informacija ili modelâ.
Kod upravljanja bez povratne veze, ali s unaprijednom vezom, upravljački sklop dobiva iz mjernih pretvornika podatke o nekim poremećajima koji djeluju na sustav. Uporabom unaprijedne veze upravljački sklop može pokušati poništiti anticipirano djelovanje mjerenih poremećaja. Ipak, unaprijedna veza najčešće nije dovoljna za postizanje zadovoljavajućih karakteristika sustava sa sklopovima učinske elektronike.
6
STRUKTURA UPRAVLJAČKOG SUSTAVA Bolja strategija upravljanja sastoji se u tome da se, osim podataka putem
unaprijedne veze, upravljačkom sklopu dovedu još i oni mjereni podaci koji otkrivaju trenutačno ponašanje sustava. Upravljački sklop tada može procijeniti veličinu otklona od željenog ponašanja te u skladu s tim djelovati na sustav tako da se brzo i pouzdano vrati u nazivni rad. Ta strategija bit je upravljanja s povratnom vezom.
Ako upravljački sklop mijenja svoju strukturu na osnovi mjerenih podataka, onda je adaptivni. Model upravljačkog sklopa na kojem se zasniva izbor takvog adaptivnog upravljačkog djelovanja isto tako se naziva adaptivni.
Blokovska shema na slici prikazuje tipično rješenje. Svaka veza između blokova predočuje jedno ili više djelovanja, mjerenja ili informacijskih tokova. Vrh strelice pokazuje prema bloku na koji se utječe, a kraj strelice od kojeg se utječe.
7
STRUKTURA UPRAVLJAČKOG SUSTAVA
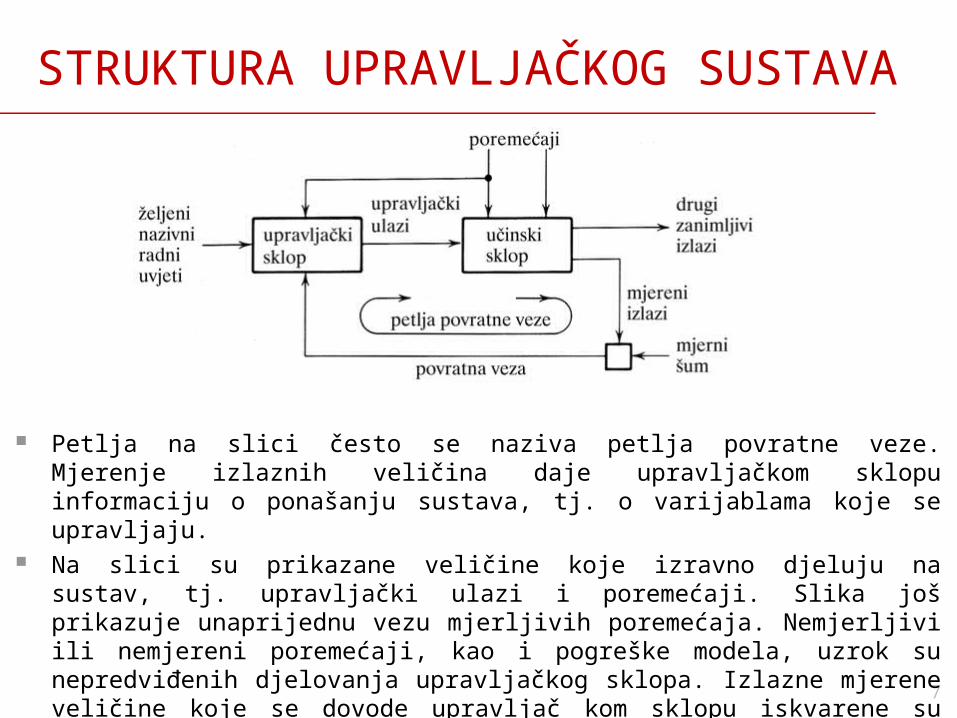
Petlja na slici često se naziva petlja povratne veze. Mjerenje izlaznih veličina daje upravljačkom sklopu informaciju o ponašanju sustava, tj. o varijablama koje se upravljaju.
Na slici su prikazane veličine koje izravno djeluju na sustav, tj. upravljački ulazi i poremećaji. Slika još prikazuje unaprijednu vezu mjerljivih poremećaja. Nemjerljivi ili nemjereni poremećaji, kao i pogreške modela, uzrok su nepredviđenih djelovanja upravljačkog sklopa. Izlazne mjerene veličine koje se dovode upravljač kom sklopu iskvarene su tzv. mjernim ili senzorskim šumom. Taj šum, zajedno s nemjerenim poremećajima i pogreškama modela, uzrok je netočnosti vrednovanja mjerenih veličina.
8
PRIMJER 1.
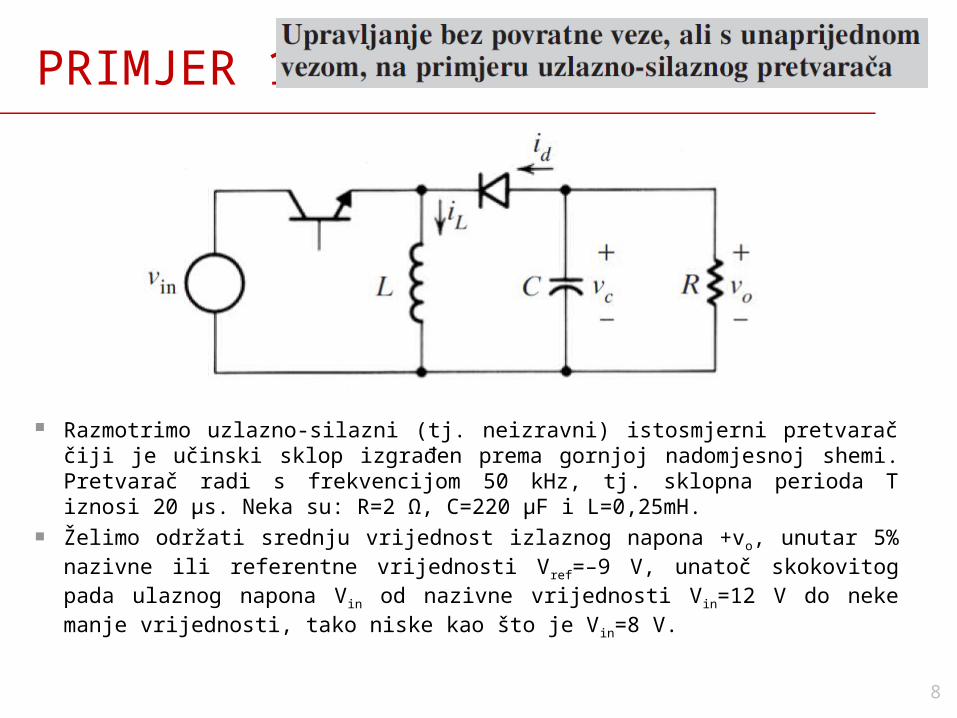
Razmotrimo uzlazno-silazni (tj. neizravni) istosmjerni pretvarač čiji je učinski sklop izgrađen prema gornjoj nadomjesnoj shemi. Pretvarač radi s frekvencijom 50 kHz, tj. sklopna perioda T iznosi 20 μs. Neka su: R=2 Ω, C=220 μF i L=0,25mH.
Želimo održati srednju vrijednost izlaznog napona +vο, unutar 5% nazivne ili referentne vrijednosti Vref=–9 V, unatoč skokovitog pada ulaznog napona V in od nazivne vrijednosti Vin=12 V do neke manje vrijednosti, tako niske kao što je Vin=8 V.
9
PRIMJER 1.
Za ostvarenje zamisli ovog primjera pretpostavimo da u krugu nema drugih neidealnosti ili neodređenosti, posebice da su tranzistor i dioda idealne sklopke. Uvidjet ćete da odziv izlaznog napona na pad ulaznog napona ne zadovoljava, čak i ako se ponašanje sklopa može opisati ovim idealiziranim modelom.
Iz dosadašnjeg poznavanja učinske elektronike znamo da ako tranzistor periodički uklapa i radi s faktorom vođenja D te ako pretvarač radi u neisprekidanom načinu rada pri vin=Vin, tada je +vo ,=–VinD/D , gdje je D =1–′ ′D. To je dobro poznata naponska transformatorska jednadžba istosmjernog pretvarača.
Taj izraz dobro aproksimira srednju vrijednost izlaznog napona vo. (Uočite promjenu polariteta napona između ulaza i izlaza.) Zato, da bi se dobio željeni izlazni napon u nazivnim uvjetima, faktor vođenja treba namjestiti na nazivnu vrijednost, tj. na D=Vref /(Vref–Vin)=0,43.
10
PRIMJER 1.
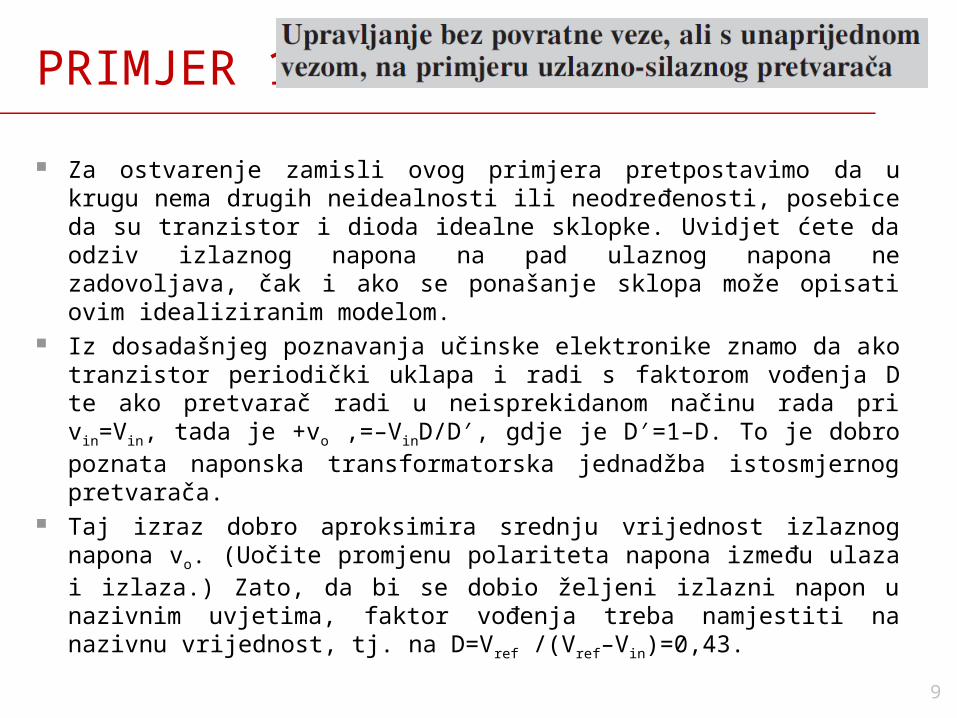
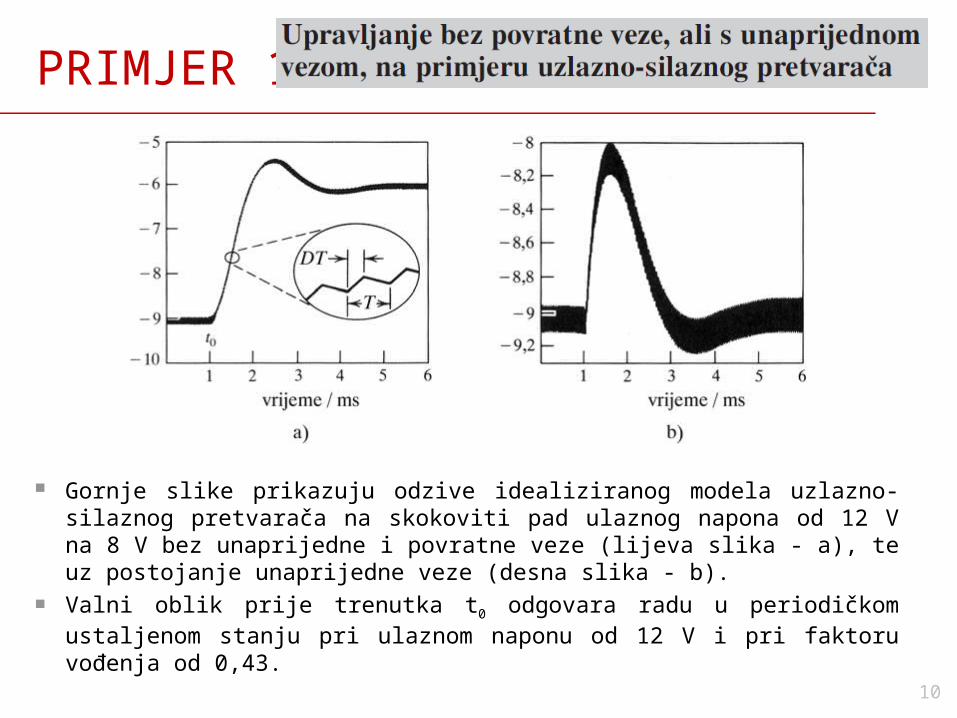
Gornje slike prikazuju odzive idealiziranog modela uzlazno-silaznog pretvarača na skokoviti pad ulaznog napona od 12 V na 8 V bez unaprijedne i povratne veze (lijeva slika - a), te uz postojanje unaprijedne veze (desna slika - b).
Valni oblik prije trenutka t0 odgovara radu u periodičkom ustaljenom stanju pri ulaznom naponu od 12 V i pri faktoru vođenja od 0,43.
11
PRIMJER 1.
Očekivano, do trenutka t0 idealizirani model na izlazu daje ispravnu srednju vrijednost napona. U trenutku t0 ulazni napon padne na 8 V. Bez povratne i unaprijedne veze model prolazi kroz znatne prijelazne titraje i na kraju se smiri na pogrešnoj vrijednosti izlaznog napona, naime na – 6V.
Ponašanje u ustaljenom stanju može se potpuno objasniti opisanim statičkim modelom, dok se titrajno ponašanje u prijelaznom stanju može objasniti tek nakon modeliranja i upoznavanja s rezultatima modeliranja usrednjavanjem strujnog kruga u nastavku predavanja.
Prirodna je ideja da se, u cilju postizanja boljeg odziva na promjene ulaznog napona vin, uvede unaprijedna veza. Ako se D mijenja u skladu s izmjerenim promjenama ulaznog napona vin (umjesto da je konstantan i određen nazivnom vrijednošću Vin) tako da je – vinD/D jednak V′ ref, tada vo poprima točnu srednju vrijednost VoAV, bez obzira na promjene ulaznog napona. Taj pristup putem modulacije širine impulsa zahtijeva da je D=Vref /(Vref– vin). Rezultirajući odziv na skokovitu promjenu ulaznog napona prikazuje desna slika - b.
12
PRIMJER 1.
Izlazni napon idealiziranog modela s unaprijednom vezom u tom se slučaju ustali na točnoj srednjoj vrijednosti izlaznog napona, unatoč skokovitoj promjeni ulaznog napona. Nadvišenje odziva znatno je manje, ali i dalje izvan dopuštenih 5%. Titraji se, međutim, smiruju jednako dugo kao i u slučaju bez unaprijedne veze.
Prijelaznu pojavu iz primjera 1 objasnit ćemo nakon što izgradimo dinamički model uzlazno-silaznog pretvarača. Unaprijedna veza u primjeru 1 kompenzira učinke poremećaja ulaznog napona u ustaljenom stanju, ali uopće ne preinačuje tijek prijelazne pojave. Ako komponente kruga nisu idealne, samo s unaprijednom vezom ne može se točno uspostaviti čak ni ustaljeno stanje. Za dobivanje znatno boljeg ponašanja nije dovoljna samo unaprijedna veza.
Pretvarač u primjeru 1 bit će naš česti predmet razmatranja. Prikazane valne oblike možemo dobiti ili mjerenjem ili pak simulacijom trenutačnog modela, primjerice u SIMPLORER-u. Pokušajte sami napraviti simulaciju!
13
PRIMJER 2.
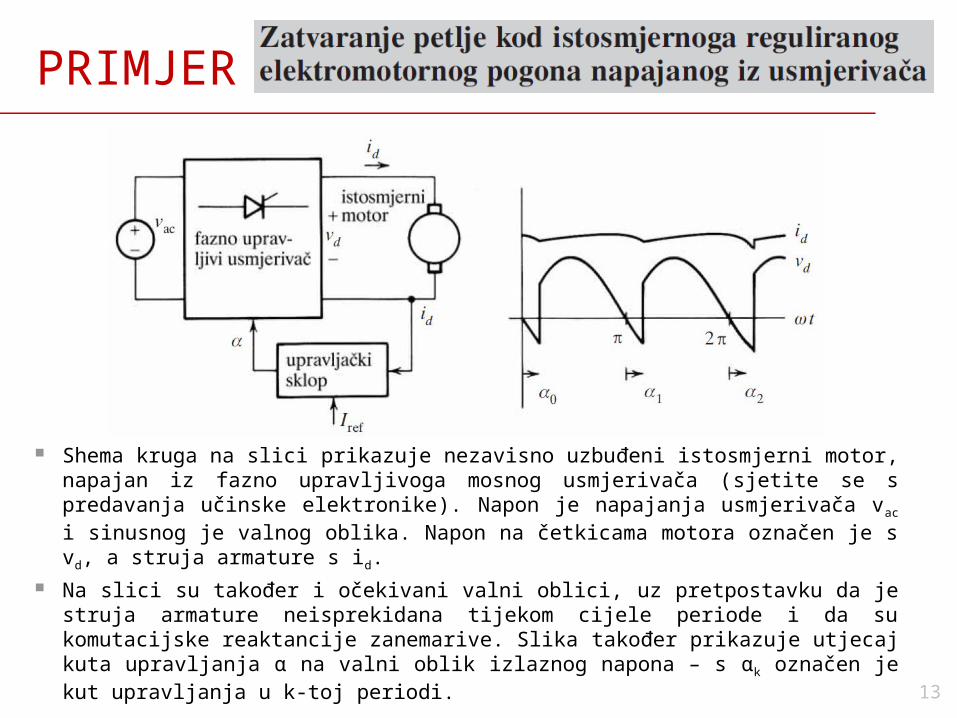
Shema kruga na slici prikazuje nezavisno uzbuđeni istosmjerni motor, napajan iz fazno upravljivoga mosnog usmjerivača (sjetite se s predavanja učinske elektronike). Napon je napajanja usmjerivača vac i sinusnog je valnog oblika. Napon na četkicama motora označen je s vd, a struja armature s id.
Na slici su također i očekivani valni oblici, uz pretpostavku da je struja armature neisprekidana tijekom cijele periode i da su komutacijske reaktancije zanemarive. Slika također prikazuje utjecaj kuta upravljanja α na valni oblik izlaznog napona – s αk označen je kut upravljanja u k-toj periodi.
14
PRIMJER 2.
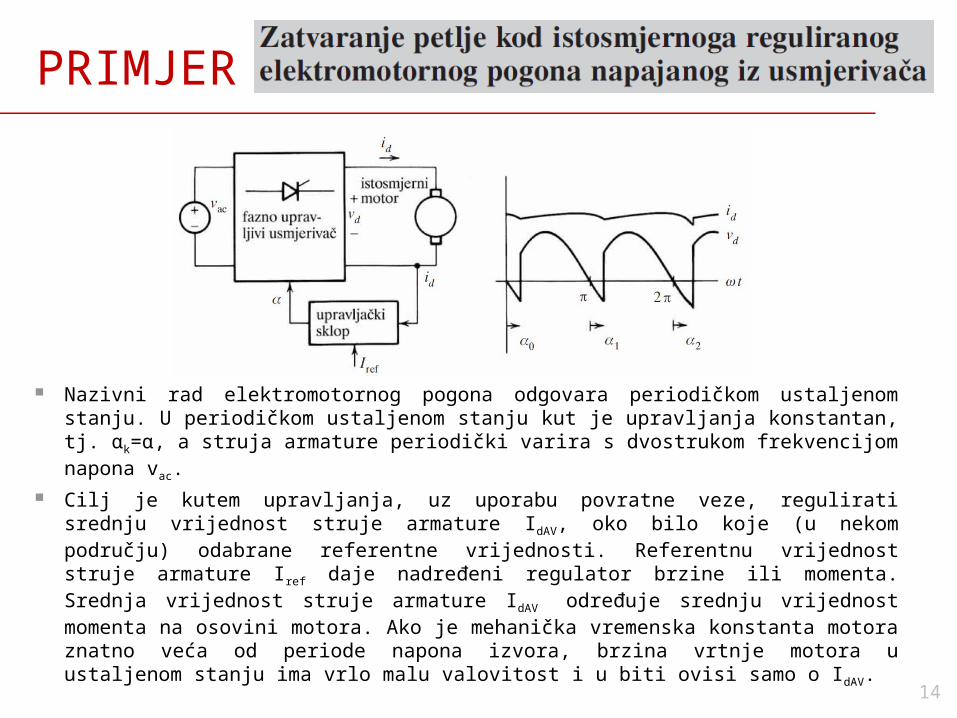
Nazivni rad elektromotornog pogona odgovara periodičkom ustaljenom stanju. U periodičkom ustaljenom stanju kut je upravljanja konstantan, tj. αk=α, a struja armature periodički varira s dvostrukom frekvencijom napona vac.
Cilj je kutem upravljanja, uz uporabu povratne veze, regulirati srednju vrijednost struje armature IdAV, oko bilo koje (u nekom području) odabrane referentne vrijednosti. Referentnu vrijednost struje armature Iref daje nadređeni regulator brzine ili momenta. Srednja vrijednost struje armature IdAV određuje srednju vrijednost momenta na osovini motora. Ako je mehanička vremenska konstanta motora znatno veća od periode napona izvora, brzina vrtnje motora u ustaljenom stanju ima vrlo malu valovitost i u biti ovisi samo o IdAV.
15
PRIMJER 2.
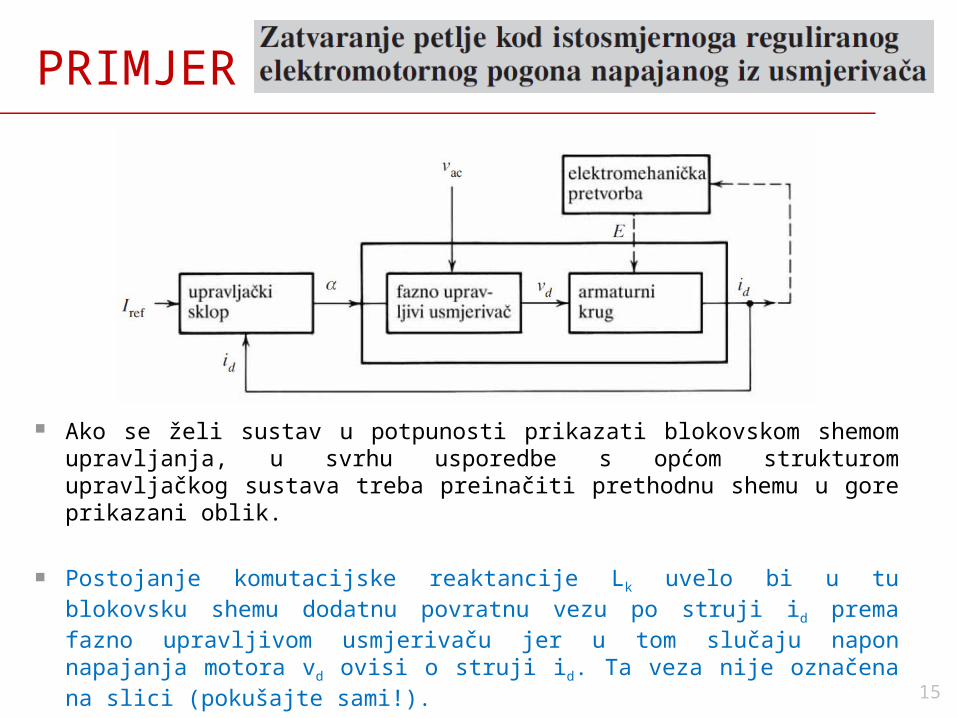
Ako se želi sustav u potpunosti prikazati blokovskom shemom upravljanja, u svrhu usporedbe s općom strukturom upravljačkog sustava treba preinačiti prethodnu shemu u gore prikazani oblik.
Postojanje komutacijske reaktancije Lk uvelo bi u tu blokovsku shemu dodatnu povratnu vezu po struji id prema fazno upravljivom usmjerivaču jer u tom slučaju napon napajanja motora vd ovisi o struji id. Ta veza nije označena na slici (pokušajte sami!).
16
PRIMJER 2.
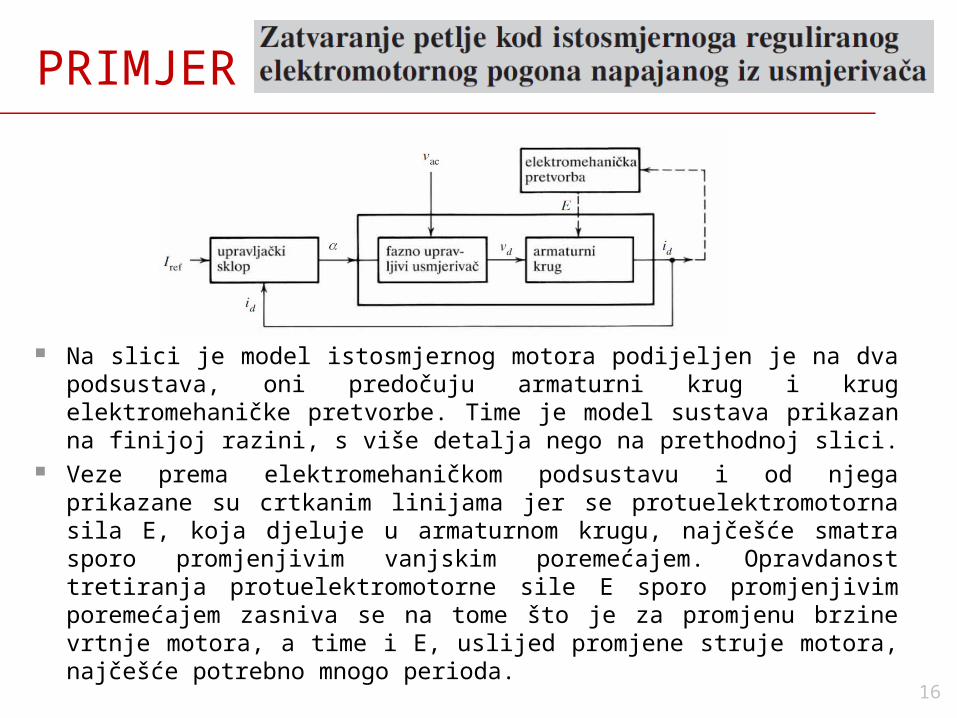
Na slici je model istosmjernog motora podijeljen je na dva podsustava, oni predočuju armaturni krug i krug elektromehaničke pretvorbe. Time je model sustava prikazan na finijoj razini, s više detalja nego na prethodnoj slici.
Veze prema elektromehaničkom podsustavu i od njega prikazane su crtkanim linijama jer se protuelektromotorna sila E, koja djeluje u armaturnom krugu, najčešće smatra sporo promjenjivim vanjskim poremećajem. Opravdanost tretiranja protuelektromotorne sile E sporo promjenjivim poremećajem zasniva se na tome što je za promjenu brzine vrtnje motora, a time i E, uslijed promjene struje motora, najčešće potrebno mnogo perioda.
17
PRIMJER 2.
U ovom primjeru treba projektirati upravljački sklop za održavanje srednje struje armature na određenoj vrijednosti unatoč sporim promjenama poremećaj E.
Uočite da smo pitanja dinamičkog modeliranja pretvaračkih sklopova već povezali s pitanjima projektiranja upravljanja, čak i prije nego što smo počeli razvijati kvantitativne ili analitičke modele pretvaračkih sklopova.
Jedno prilično zadovoljavajuće i naširoko upotrebljavano rješenje upravljanja takvim sustavima zasniva se na proporcionalno-integracijskom (PI) regulatoru. Njegova je srž proporcionalni dio. Djelovanje proporcionalnog dijela u skladu je s jednostavnim razmišljanjem: treba promijeniti kut upravljanja od nazivne vrijednosti za vrijednost koja je proporcionalna pogrešci Iref – IdAV. Kada je pogreška pozitivna, proporcionalni dio regulatora smanjuje kut upravljanja jer se na taj način srednja vrijednost napona, a time i srednja vrijednost struje povećava – tako se smanjuje pogreška. Kada je pogreška negativna, proporcionalni dio regulatora djeluje suprotno. On povećava kut upravljanja razmjerno vrijednosti pogreške. Integralni dio regulatora djeluje na integral pogreške. On radi sporije i smanjuje pogrešku u ustaljenom stanju nastalu zbog kolebanja parametara i konstantnih poremećaja.
18
PRIMJER 2.
Umjesto PI-regulatora može se uporabiti proporcionalno-integracijsko-derivacijski (PID) regulator. PID-regulator nastaje dodavanjem PI-regulatoru dijela koji ovisi o derivaciji pogreške ili o derivaciji izlazne veličine (u tom se slučaju naziva derivacijska povratna veza). Tako se ubrzava odziv PI-regulatora. Na PI, PID i srodne upravljačke strukture, kao što su kompenzatori s kašnjenjem, prethođenjem te kašnjenjem i prethođenjem, nailazi se svugdje u upravljačkim krugovima.
Povratna veza može ubrzati odziv sustava na zahtijevane promjene, može ubrzati povratak u nazivni rad nakon neočekivanih poremećaja i smanjiti osjetljivost radnih karakteristika na promjene u sustavu. Međutim, ako upravljački sklop neodgovarajuće reagira na signale povratne veze, sustav koji je s otvorenom petljom stabilan i neosjetljiv na poremećaje, zatvaranjem petlje može postati osjetljiv na poremećaje, spor pri povratku u nazivni rad ili čak potpuno nestabilan; djelovanje upravljačkog sklopa može pogoršati odstupanje od nazivnog rada umjesto da ubrza povratak u njega. Drugim riječima, da bi se ostvarile prednosti upravljanja uporabom povratne veze, treba pažljivo projektirati i izvesti povratnu vezu.