Embed Size (px)
Citation preview
Ubungsblatt 1zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph Schweigert
Erstellt am 09.04.2008, 08:11 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist07.04.2008, 08:00 Uhr.
Dieses Blatt ist das ersteUbungsblatt zur Vorlesung Lineare Algebra II. Es ist in der erstenUbungsgruppe imSommersemester 2008 abzugeben.
1 Gegeben seien die Matrizen
A =
3 5 3
1 2 1
1 −1 7
, B =
3 2 6 3
2 1 3 2
2 3 1 4
.
1. (5 Punkte) Untersuchen Sie die folgenden Gleichungssysteme darauf, ob sie eindeutige reelle Losun-gen haben:
Ax=
15
6
−9
, Bx=
4
1
6
.
2. (5 Punkte) Beschreiben Sie die Geometrie der Losungsraume der GleichungssystemeAx= b undBx= b als Unterraume vonR3 beziehungsweise vonR4 als Funktion vonb∈ R3.
3. (5 Punkte) Geben Sie schließlich die Losungsraume explizit an!
LosungshinweisBeide MatrizenA,B haben Rang 3. Die MatrixA ist daher als quadratische Ma-trix invertibel, eine Losung existiert und ist eindeutig, also ein Punkt inR3. Einzige Losung vonAx = a ist (1,3,−1). Im zweiten Fall ist die Losungsmenge ein affiner Unterraum desR4 der Dimen-sion 1. Insbesondere gibt es nie eine eindeutige Losung. Die explizite Losungsmenge vonBx = b ist(1/2,5,0,−5/2)+R(−4,−3,1,4).

2 Im R2 seien die Basen
A =
((−1
1
),
(2
3
)), B =
((1
2
),
(0
1
))
gegeben.
1. (5 Punkte) Berechnen Sie die TransformationsmatrixTAB .
2. (5 Punkte) Bestimmen Sie mit Hilfe der Transformationsmatrix die Koordinaten des Vektors
v = 2
(−1
1
)+9
(2
3
)
bezuglich der BasisB.
LosungshinweisAusa j = ∑i Ti j bi finden wir mit
a1 =−b1 +3b2 a2 = 2b1−b2
die Matrix
T =
(−1 2
3 −1
).
Es folgtT(2,9) = (16,−3), alsov = 16b1−3b2.
3 (5 Punkte) SeiK ein beliebiger Korper und seienQ der Korper der rationalen Zahlen undR der Korperder reellen Zahlen. Sind die folgenden Teilmengen Unterrringe der angegebenen Matrizenringe?
1. {
(a 0
b c
)∈M(2×2,R) |a∈Q, b,c∈ R} ⊂M(2×2,R)
2. {
(a 0
b 0
)∈M(2×2,K) |a,b∈ K} ⊂M(2×2,K)
LosungshinweisDurch Nachrechnen sehen wir, dass beide Teilmengen unter Addition und Multiplikation abgeschlossensind. Also sind beide Teilmengen Unterringe der gegebenen Matrizenringe.

4 (10 Punkte) SeiK ein Korper und seienX,Y∈M(m×n,K) Matrizen. Zeigen Sie: die beiden Matrizen sindgenau dannaquivalent, wenn sie dieselbe lineare Abbildung bezuglich verschiedener Basen beschreiben.Das heißt: Es gibt einenn-dimensionalenK-VektorraumV mit zwei geordneten BasenA ,A ′ und einenm-dimensionalenK-VektorraumW mit zwei geordneten BasenB,B ′ und eine lineare AbbildungΦ : V →W,so dass gilt
X = MAB (Φ) und Y = MA ′
B ′ (Φ) .
Losungshinweis“⇐” folgt sofort aus Satz 2.7.4.“⇒” SeienX,Y aquivalentem×n Matrizen:
Y = SXT−1
mit S∈ GL(m,K) und T ∈ GL(n,K). Sei A = (v1, . . . ,vn) eine beliebige geordnete Basis vonV undB = (w1, . . . ,wm) eine beliebige geordnete Basis vonW. Betrachte die durch
Φ(vi) =m
∑j=1
Xji w j
definierte lineare Abbildung. Finde nun die geordnete BasisA ′ vonV mit Elementenv′i , die durch
v j =n
∑i=1
Ti j v′i
definiert ist; analog finde eine geordnete BasisB ′ vonW mit
w j =m
∑i=1
Si j w′i
und rechneΦ(v′i) = Φ(∑ j T
−1ji v j) = ∑ j T
−1ji Φ(v j)
= ∑ j,k Xk jT−1ji wk = ∑ jkl SlkXk jT
−1ji w′l = ∑l Yli w′l

5 (15 Punkte) SeiK ein Korper,V ein K-Vektorraum,U ⊂ V ein Untervektorraum undπ : V → V/U diekanonische Surjektion.(i) Zeigen Sie:Dann existiert fur jedenK-VektorraumX und jede lineare Abbildungf : V →X mit f|U = 0 eine eindeutigbestimmte lineare Abbildungf : V/U → X mit f = f ◦π.
Sei Q ein K-Vektorraum undπ : V → Q eine lineare Abbildung mitπ|U = 0, so dass fur jede lineareAbbildung f : V → X mit f|U = 0 eine eindeutig bestimmte lineare Abbildungf : Q→ X mit f = f ◦ πexistiert.(ii) Zeigen Sie:Dann gibt es einen eindeutig bestimmten IsomorphismusfQ : Q→V/U , so dassπ = fQ◦ π gilt.
Losungshinweis(i) Seiv∈V. Fur jede solche Abbildungf muss gelten:
f ([v]) = f ◦π(v) = f (v) ,
so dassf eindeutig festgelegt ist. Dies ist wegenf (v+u) = f (v)+ f (u) = f (v) fur alleu∈U wohldefiniert,d.h. unabhangig vom Reprasentantenv von [v]. Aus der Linearitat von f folgt wieder leicht die Linearitatvon f .(ii) Wenden wir (i) auf die lineare Abbildungπ :V →Q an, so finden wir eine eindeutige lineare AbbildungfQ : V/U → Q mit π = fQ◦π. Zum zweiten wenden wir die fur Q geforderte Eigenschaft auf die lineareAbbildungπ : V →V/U an und findenfQ : Q→V/U mit π = fQ◦ π. Es folgt
fQ◦ fQ◦ π = fQ◦π = π .
Naturlich gilt auch idQ ◦ π = π. Aber die definierende Eigenschaft vonQ, angewandt aufπ : V → Qselbst, sagt, dass eine solche Abbildung eindeutig ist, also giltfQ ◦ fQ = idQ. Analog zeigt man auchfQ◦ fQ = idV/U .
6 (15 Punkte) SeiV ein K–Vektorraum undU,W Untervektorraume vonV, so dassV = U ⊕W gilt, d.h.Vsei innere direkte Summe vonU undW. Zeigen Sie: Dann istV zusammen mit den Inklusionen
iU : U →V iW : W→V
isomorph zuraußeren direkten Summe vonU undW.
Losungshinweis:Wir mussen nur die universelle Eigenschaft deraußeren direkten Summe nachweisen. Nach Lemma 1.5.4lasst sich jedesv∈V eindeutigalsv= u+w mit u∈U undw∈W schreiben. SeiZ ein beliebiger weitererK-Vektorraum; gegeben zwei lineare Abbildungen
gU : U → Z und gW : W→ Z
Dann muss jedesg : V → Z, das den Forderungen der universellen Eigenschaft genugt, erfullen
g(v) = g(u+w) = g◦ iU(u)+g◦ iW(w) = gU(u)+gW(w) ,
ist also eindeutig. Die so definierte lineare Abbildungg : V → Z leistet umgekehrt auch alles Geforderte.Innere undaußere direkte Summe sind also nach Satz 2.4.8 kanonisch isomorph.

7 (15 Punkte) SeiV ein endlich dimensionaler Vektorraum undΦ ∈ End(V). Zeigen Sie, dass die folgendenBedingungenaquivalent sind.
(i) V = ker(Φ)⊕ im(Φ)
(ii) im(Φ2) = im(Φ) .
Losungshinweis(i) ⇒ (ii). Die Inklusion im(Φ2) ⊂ im(Φ) gilt ohnehin fur jeden Endomorphismus. Seiv ∈ im(Φ), alsov = Φ(x). Schreibex = x1 + x2 mit x1 ∈ ker(Φ) undx2 ∈ im(Φ). Dann istΦ(x) = Φ(x2). Daher konnenwir x∈ im(Φ) annehmen, also folgt mitx = Φ(x′) die Gleichung,v = Φ2(x′) ∈ im(Φ2).(ii) ⇒ (i). Betrachte die EinschrankungΨ von Φ auf imΦ. Wegen (ii) ist diese Abbildung surjektiv, alsowegen der endlichen Dimension vonV auch injektiv. Sie hat also trivialen Kern, somit kerΦ∩ imΦ = {0}.Es giltv= (v−Ψ−1Φ(v))+Ψ−1Φ(v). Man rechnet nun leicht nach, dassv−Ψ−1Φ(v) fur jedesv∈V imKern vonΦ liegt. Offenbar istΨ−1Φ(v) ∈ im(Φ). Also istV auch Summe von Kern und Bild vonΦ.
Abgabe in der erstenUbungsgruppe im Sommersemester 2008. Das Blatt geht in die Wertung ein.
Ubungsblatt 2zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph Schweigert
Erstellt am 14.04.2008, 15:25 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist14.04.2008, 08:00 Uhr.
1 Es seiK ein Korper undM,N ∈ M(n×n,K) fur einn∈ N. Die Eintrage der MatrixM seien mitmi, j fur(1≤ i, j ≤ n) bezeichnet. Sind die folgenden Aussagenuber Determinanten richtig?
1 Ist M eine untere Dreiecksmatrix, dann ist die Determinante vonM gleich demProdukt der Diagonalelemente.
© Ja /© Nein
Ist ein Diagonalelement vonM gleich 0, dann ist die Determinante vonM auchgleich 0.
© Ja /© Nein
2 Es gilt (detM) · (detN) = det(M ·N). © Ja /© Nein
Es gilt (detM)+(det N) = det(M +N). © Ja /© Nein
3 Ist mi, j = 0 fur i + j > n+1, dann ist detM = ∏ni=1mi,n+1−i . © Ja /© Nein
Ist mi, j = 0 fur i + j ≤ n, dann ist detM = ∏ni=1mi,n+1−i . © Ja /© Nein
4 Enthalt M nur die Zahlen 0 und 1, dann ist die Determinante vonM auch entwe-der 0 oder 1.
© Ja /© Nein
Enthalt M nur die Zahlen 0 und 1, dann ist die Determinante vonM in der Menge{0,1,−1}.
© Ja /© Nein
5 Sind zwei Zeilen vonN gleich, so ist detN = 0. © Ja /© Nein
Ist eine Zeile vonN das Negative einer anderen Zeile vonN, dann ist detN = 0. © Ja /© Nein
2 Alle vorkommenden Matrizen haben Eintrage in einem KorperK. Sind die folgenden Aussagen wahr?
1 Der Zeilenrang einer Matrix ist gleich ihrem Spaltenrang. © Ja /© Nein
2 Einen×n-Matrix mit vollem Rang laßt sich durch elementare Zeilen- und Spal-tenumformungen in die Einheitsmatrixuberfuhren.
© Ja /© Nein
3 Der Zeilenrang einer Matrix ist gleich der Dimension des Raums, der von denSpaltenvektoren aufgespannt wird.
© Ja /© Nein
4 Der Spaltenrang einer Matrix ist gleich der Dimension des Raums, der von denZeilenvektoren aufgespannt wird.
© Ja /© Nein
5 Die Dimension des Losungsraums eines homogenen linearen Gleichungssy-stemsAx = 0 ist gleich der Differenz der Anzahl der Unbekannten und demRang der MatrixA.
© Ja /© Nein
6 Es seiA eine quadratische Matrix. Dann hat das lineare GleichungssystemAx=0 genau dann eine eindeutige Losung, wenn die MatrixA invertierbar ist.
© Ja /© Nein
7 Fur 0 6= c∈ K und eine MatrixA habenA undc·A den gleichen Rang. © Ja /© Nein
8 Eine invertierbaren×n-Matrix hat den Rangn. © Ja /© Nein
3 Berechnen Sie die Determinanten der folgenden Matrizen:
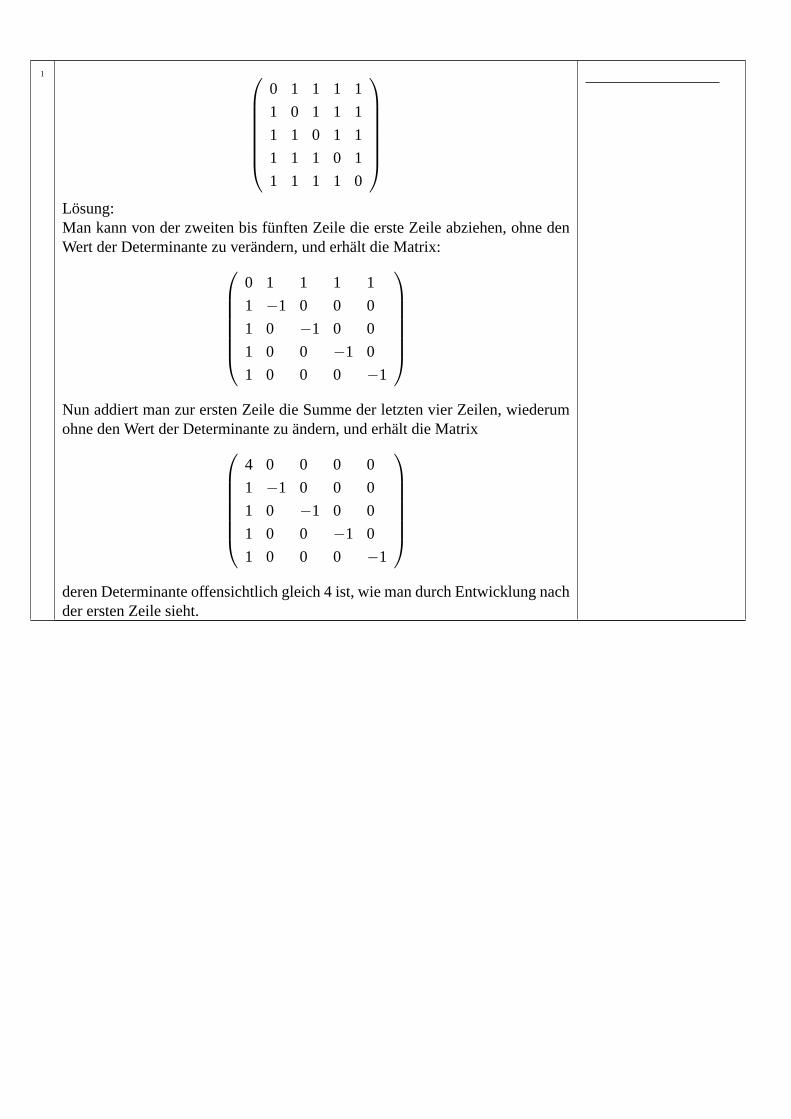
1 0 1 1 1 1
1 0 1 1 1
1 1 0 1 1
1 1 1 0 1
1 1 1 1 0
Losung:Man kann von der zweiten bis funften Zeile die erste Zeile abziehen, ohne denWert der Determinante zu verandern, und erhalt die Matrix:
0 1 1 1 1
1 −1 0 0 0
1 0 −1 0 0
1 0 0 −1 0
1 0 0 0 −1
Nun addiert man zur ersten Zeile die Summe der letzten vier Zeilen, wiederumohne den Wert der Determinante zuandern, und erhalt die Matrix
4 0 0 0 0
1 −1 0 0 0
1 0 −1 0 0
1 0 0 −1 0
1 0 0 0 −1
deren Determinante offensichtlich gleich 4 ist, wie man durch Entwicklung nachder ersten Zeile sieht.
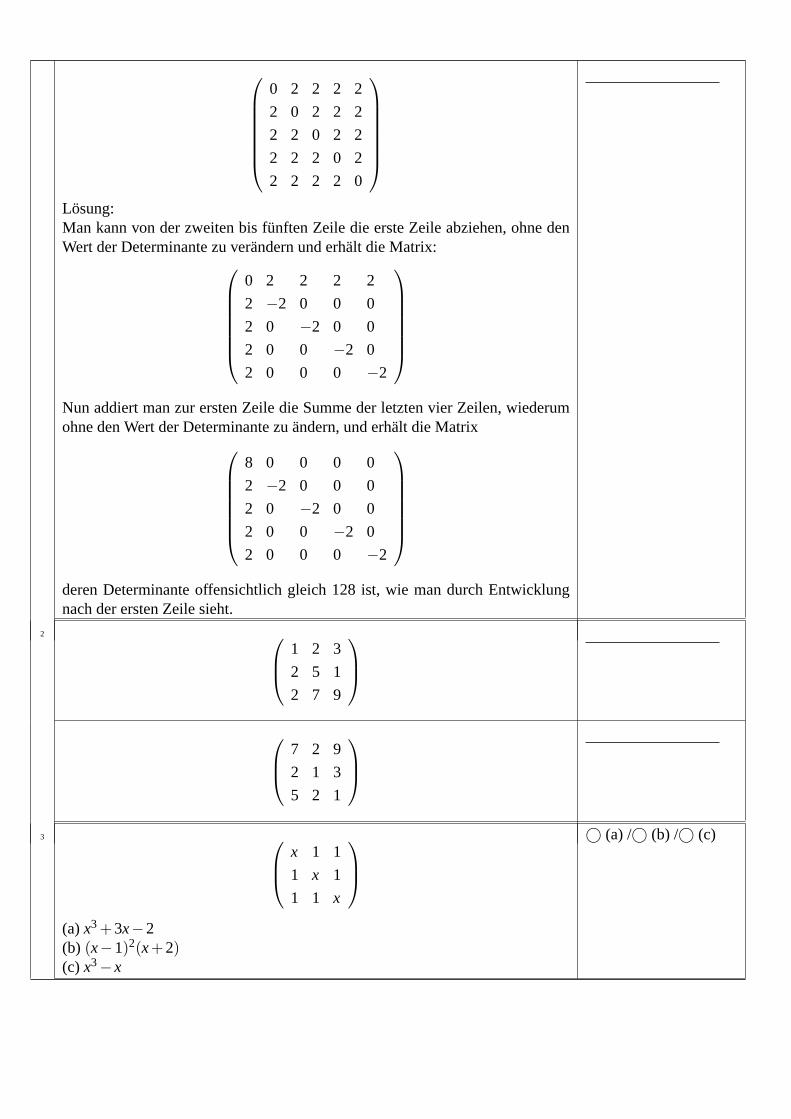
0 2 2 2 2
2 0 2 2 2
2 2 0 2 2
2 2 2 0 2
2 2 2 2 0
Losung:Man kann von der zweiten bis funften Zeile die erste Zeile abziehen, ohne denWert der Determinante zu verandern und erhalt die Matrix:
0 2 2 2 2
2 −2 0 0 0
2 0 −2 0 0
2 0 0 −2 0
2 0 0 0 −2
Nun addiert man zur ersten Zeile die Summe der letzten vier Zeilen, wiederumohne den Wert der Determinante zuandern, und erhalt die Matrix
8 0 0 0 0
2 −2 0 0 0
2 0 −2 0 0
2 0 0 −2 0
2 0 0 0 −2
deren Determinante offensichtlich gleich 128 ist, wie man durch Entwicklungnach der ersten Zeile sieht.
2 1 2 3
2 5 1
2 7 9
7 2 9
2 1 3
5 2 1
3 x 1 1
1 x 1
1 1 x
(a)x3 +3x−2(b) (x−1)2(x+2)(c) x3−x
© (a) /© (b) /© (c)
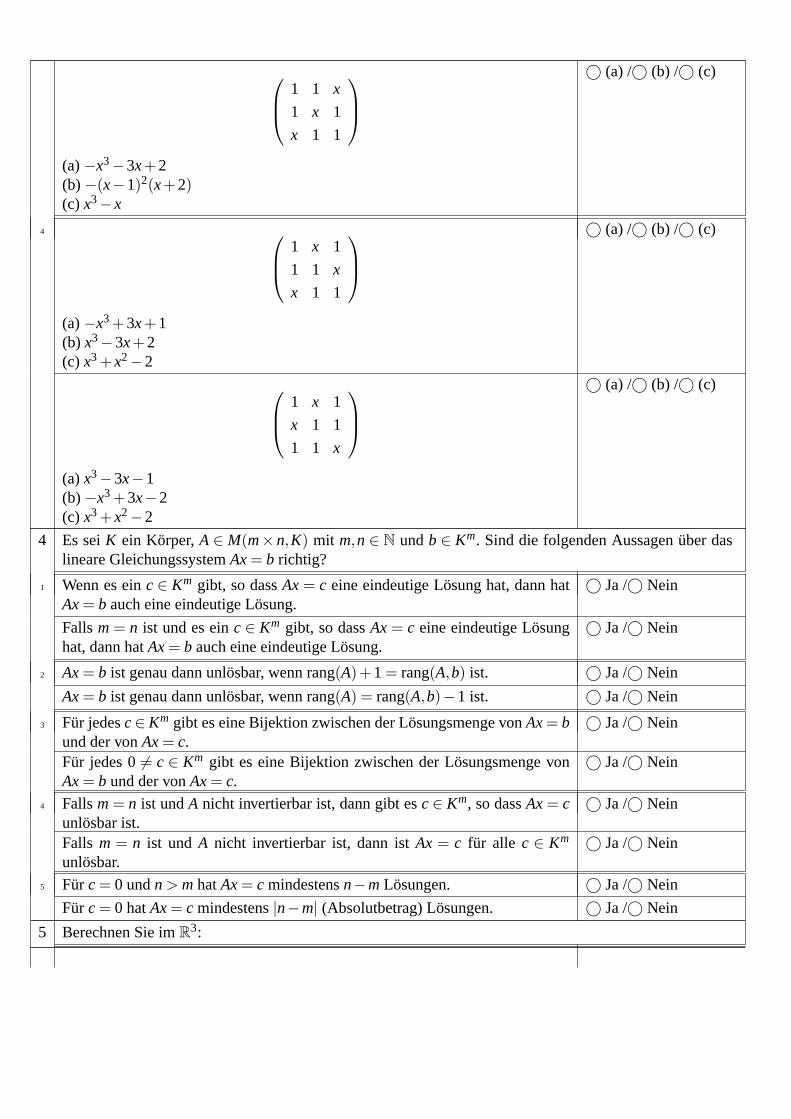
1 1 x
1 x 1
x 1 1
(a)−x3−3x+2(b)−(x−1)2(x+2)(c) x3−x
© (a) /© (b) /© (c)
4 1 x 1
1 1 x
x 1 1
(a)−x3 +3x+1(b) x3−3x+2(c) x3 +x2−2
© (a) /© (b) /© (c)
1 x 1
x 1 1
1 1 x
(a)x3−3x−1(b)−x3 +3x−2(c) x3 +x2−2
© (a) /© (b) /© (c)
4 Es seiK ein Korper,A∈ M(m×n,K) mit m,n∈ N undb∈ Km. Sind die folgenden Aussagenuber daslineare GleichungssystemAx= b richtig?
1 Wenn es einc∈ Km gibt, so dassAx= c eine eindeutige Losung hat, dann hatAx= b auch eine eindeutige Losung.
© Ja /© Nein
Falls m= n ist und es einc∈ Km gibt, so dassAx= c eine eindeutige Losunghat, dann hatAx= b auch eine eindeutige Losung.
© Ja /© Nein
2 Ax= b ist genau dann unlosbar, wenn rang(A)+1 = rang(A,b) ist. © Ja /© Nein
Ax= b ist genau dann unlosbar, wenn rang(A) = rang(A,b)−1 ist. © Ja /© Nein
3 Fur jedesc∈ Km gibt es eine Bijektion zwischen der Losungsmenge vonAx= bund der vonAx= c.
© Ja /© Nein
Fur jedes 06= c ∈ Km gibt es eine Bijektion zwischen der Losungsmenge vonAx= b und der vonAx= c.
© Ja /© Nein
4 Fallsm= n ist undA nicht invertierbar ist, dann gibt esc∈ Km, so dassAx= cunlosbar ist.
© Ja /© Nein
Falls m = n ist und A nicht invertierbar ist, dann istAx = c fur alle c ∈ Km
unlosbar.© Ja /© Nein
5 Fur c = 0 undn > m hatAx= c mindestensn−m Losungen. © Ja /© Nein
Fur c = 0 hatAx= c mindestens|n−m| (Absolutbetrag) Losungen. © Ja /© Nein
5 Berechnen Sie imR3:
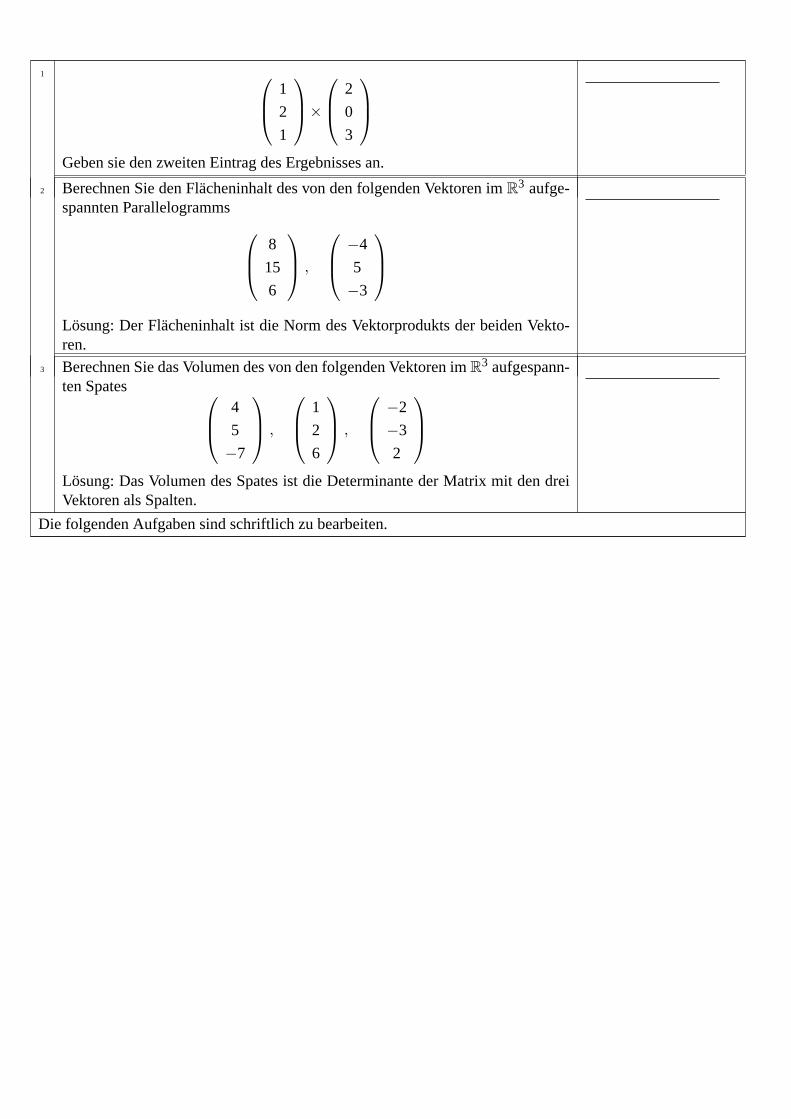
1 1
2
1
×
2
0
3
Geben sie den zweiten Eintrag des Ergebnisses an.
2 Berechnen Sie den Flacheninhalt des von den folgenden Vektoren imR3 aufge-spannten Parallelogramms 8
15
6
,
−4
5
−3
Losung: Der Flacheninhalt ist die Norm des Vektorprodukts der beiden Vekto-ren.
3 Berechnen Sie das Volumen des von den folgenden Vektoren imR3 aufgespann-ten Spates 4
5
−7
,
1
2
6
,
−2
−3
2
Losung: Das Volumen des Spates ist die Determinante der Matrix mit den dreiVektoren als Spalten.
Die folgenden Aufgaben sind schriftlich zu bearbeiten.
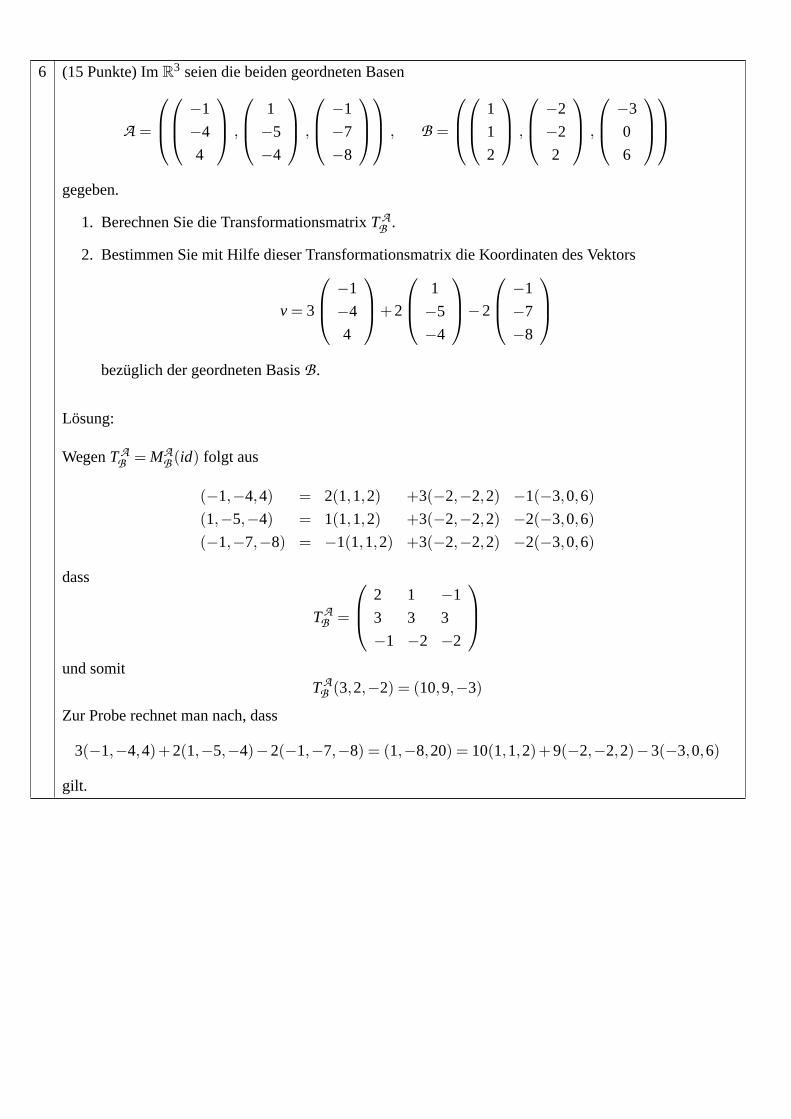
6 (15 Punkte) ImR3 seien die beiden geordneten Basen
A =
−1
−4
4
,
1
−5
−4
,
−1
−7
−8
, B =
1
1
2
,
−2
−2
2
,
−3
0
6
gegeben.
1. Berechnen Sie die TransformationsmatrixTAB .
2. Bestimmen Sie mit Hilfe dieser Transformationsmatrix die Koordinaten des Vektors
v = 3
−1
−4
4
+2
1
−5
−4
−2
−1
−7
−8
bezuglich der geordneten BasisB.
Losung:
WegenTAB = MA
B (id) folgt aus
(−1,−4,4) = 2(1,1,2) +3(−2,−2,2) −1(−3,0,6)(1,−5,−4) = 1(1,1,2) +3(−2,−2,2) −2(−3,0,6)(−1,−7,−8) = −1(1,1,2) +3(−2,−2,2) −2(−3,0,6)
dass
TAB =
2 1 −1
3 3 3
−1 −2 −2
und somit
TAB (3,2,−2) = (10,9,−3)
Zur Probe rechnet man nach, dass
3(−1,−4,4)+2(1,−5,−4)−2(−1,−7,−8) = (1,−8,20) = 10(1,1,2)+9(−2,−2,2)−3(−3,0,6)
gilt.
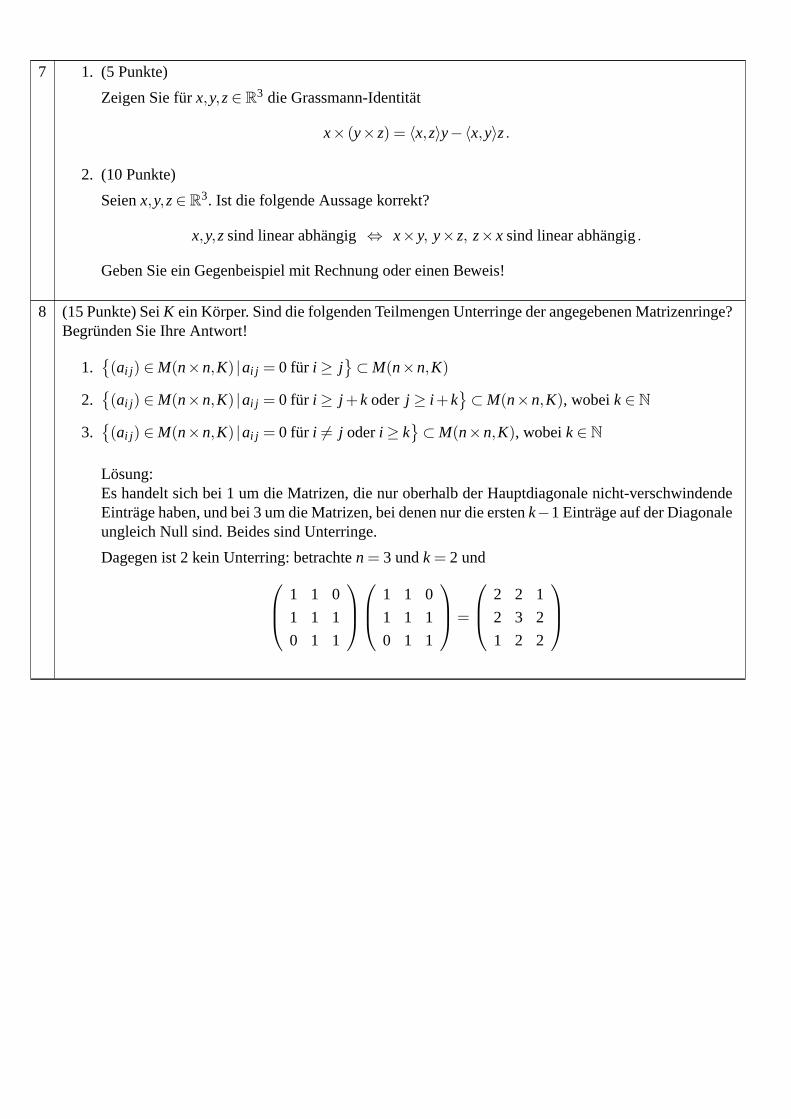
7 1. (5 Punkte)
Zeigen Sie fur x,y,z∈ R3 die Grassmann-Identitat
x× (y×z) = 〈x,z〉y−〈x,y〉z.
2. (10 Punkte)
Seienx,y,z∈ R3. Ist die folgende Aussage korrekt?
x,y,zsind linear abhangig ⇔ x×y, y×z, z×x sind linear abhangig.
Geben Sie ein Gegenbeispiel mit Rechnung oder einen Beweis!
8 (15 Punkte) SeiK ein Korper. Sind die folgenden Teilmengen Unterringe der angegebenen Matrizenringe?Begrunden Sie Ihre Antwort!
1.{(ai j ) ∈M(n×n,K) |ai j = 0 fur i ≥ j
}⊂M(n×n,K)
2.{(ai j ) ∈M(n×n,K) |ai j = 0 fur i ≥ j +k oder j ≥ i +k
}⊂M(n×n,K), wobeik∈ N
3.{(ai j ) ∈M(n×n,K) |ai j = 0 fur i 6= j oderi ≥ k
}⊂M(n×n,K), wobeik∈ N
Losung:Es handelt sich bei 1 um die Matrizen, die nur oberhalb der Hauptdiagonale nicht-verschwindendeEintrage haben, und bei 3 um die Matrizen, bei denen nur die erstenk−1 Eintrage auf der Diagonaleungleich Null sind. Beides sind Unterringe.
Dagegen ist 2 kein Unterring: betrachten = 3 undk = 2 und 1 1 0
1 1 1
0 1 1
1 1 0
1 1 1
0 1 1
=
2 2 1
2 3 2
1 2 2

9 SeiK ein Korper und seiA∈M(2×2,K). Die KommutanteA′ vonA ist der Untervektorraum vonM(2×2,K), der aus den Matrizen besteht, die mit der MatrixA kommutieren:
A′ := {B∈M(2×2,K) |A·B−B·A = 0} .
1. (5 Punkte) Zeigen Sie, dass die Kommutante eines Vielfachen der EinheitsmatrixλE2 mit λ ∈ K dieDimension 4 hat.
2. (5 Punkte) Zeigen Sie, dass die Kommutante einer MatrixA, die kein Vielfaches der Einheitsmatrixist, mindestens die Dimension 2 hat.
3. (5 Punkte) Zeigen Sie, dass die Kommutante einer MatrixA, die kein Vielfaches der Einheitsmatrixist, hochstens die Dimension 3 hat.
4. (Zusatzaufgabe ohne Wertung) Zeigen Sie, dass die Kommutante einer MatrixA, die kein Vielfachesder Einheitsmatrix ist, genau die Dimension 2 hat.
Losung:Ist A ein Vielfaches der EinheitsmatrixE2, so ist offenbarA′ = M(2×2,K), also dimK A′ = 4.Ist A kein Vielfaches der Einheitsmatrix, so kommutiertA mit E2 und mitA selbst.E2 undA sind linearunabhangig, also ist dimK A′ ≥ 2.Schreibt man
A =
(a b
c d
)so sieht man, dass nur Vielfache der Einheitsmatrix eine Kommutante der Dimension 4 haben: Vertauschenmit der MatrixeinheitE11 liefert die Bedingungb = c = 0, Vertauschen mit der MatrixeinheitE12 liefertdie Bedingunga = d.Zur Zusatzaufgabe:Ware dimK A′ = 3, so ware der Schnitt mit dem zwei-dimensionalen Unterraum spanK(E11,E12) nicht derNullvektorraum. Aus dem Gleichsetzen von(
a b
c d
)(α β0 0
)=
(aα βa
cα βc
)
und (α β0 0
)(a b
c d
)=
(αa+βc αb+βd
0 0
)folgt, da man das Element in der Kommutante so wahlen kann, dass nichtα und β gleich Null sind,c = 0. Ein analoges Argument mit dem Untervektorraum spanK(E21,E22) zeigt, dass auchb = 0 geltenmuss. Also istA eine Diagonalmatrix. Die beiden Diagonalelemente sind verschieden, da andernfalls dieKommutante Dimension 4 hatte.Die explizite Rechnung (
a 0
0 d
)(α βγ δ
)=
(aα aβdγ dδ
)und (
α βγ δ
)(a 0
0 d
)=
(aα dβaγ dδ
)zeigt durch den Vergleich der Außerdiagonalelemente, dass fur Matrizen in der Kommutante von Diago-nalmatrizenβ = γ = 0 gelten muss, diese Kommutante also zwei-dimensional ist.

Den Abgabeschluß der multiple choice Aufgaben sehen Sie oben auf dem Blatt. Die schriftlichen Aufgabenwerden in derUbungsgruppe am Freitag, dem 14. April, abgegeben.
Ex 1, Qu 1, Var 1: [’Ja’]Ex 1, Qu 1, Var 2: [’Nein’]Ex 1, Qu 2, Var 1: [’Ja’]Ex 1, Qu 2, Var 2: [’Nein’]Ex 1, Qu 3, Var 1: [’Nein’]Ex 1, Qu 3, Var 2: [’Nein’]Ex 1, Qu 4, Var 1: [’Nein’]Ex 1, Qu 4, Var 2: [’Nein’]Ex 1, Qu 5, Var 1: [’Ja’]Ex 1, Qu 5, Var 2: [’Ja’]
Ex 2, Qu 1, Var 1: [’Ja’]Ex 2, Qu 2, Var 1: [’Ja’]Ex 2, Qu 3, Var 1: [’Ja’]Ex 2, Qu 4, Var 1: [’Ja’]Ex 2, Qu 5, Var 1: [’Ja’]Ex 2, Qu 6, Var 1: [’Ja’]Ex 2, Qu 7, Var 1: [’Ja’]Ex 2, Qu 8, Var 1: [’Ja’]
Ex 3, Qu 1, Var 1: [’4’]Ex 3, Qu 1, Var 2: [’128’]Ex 3, Qu 2, Var 1: [’18’]Ex 3, Qu 2, Var 2: [’-18’]Ex 3, Qu 3, Var 1: [’(b)’]Ex 3, Qu 3, Var 2: [’(b)’]Ex 3, Qu 4, Var 1: [’(b)’]Ex 3, Qu 4, Var 2: [’(b)’]
Ex 4, Qu 1, Var 1: [’Nein’]Ex 4, Qu 1, Var 2: [’Ja’]Ex 4, Qu 2, Var 1: [’Ja’]Ex 4, Qu 2, Var 2: [’Ja’]Ex 4, Qu 3, Var 1: [’Nein’]Ex 4, Qu 3, Var 2: [’Nein’]Ex 4, Qu 4, Var 1: [’Ja’]Ex 4, Qu 4, Var 2: [’Nein’]Ex 4, Qu 5, Var 1: [’Ja’]Ex 4, Qu 5, Var 2: [’Nein’]
Ex 5, Qu 1, Var 1: [’-1’]Ex 5, Qu 2, Var 1: [’125’]Ex 5, Qu 3, Var 1: [’11’]
Ubungsblatt 3zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph Schweigert
Erstellt am 21.04.2008, 16:04 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist21.04.2008, 08:30 Uhr.
1 Es seiK ein Korper. Weiter seiA = (ai, j) ∈ M(n×n,K) und s∈ K. Entscheiden Sie, ob die folgendenAussagen allgemein richtig sind.
1 Es ist det(sA) = s·detA. © Ja /© Nein
Es ist det(sA) = sn ·detA. © Ja /© Nein
2 Ist K = Q und det(A3) = 1, so ist detA = 1.Dann muss auch(detA)3 = 1 gelten, wasuberQ nur die Losung detA = 1 hat.
© Ja /© Nein
Ist K = Q und det(A5) = 1, so ist detA = 1.Dann muss auch(detA)5 = 1 gelten, wasuberQ nur die Losung detA = 1 hat.
© Ja /© Nein
3 Ist K = Q und detA = 2, so gibt es keinB∈M(n×n,Q) mit B2 = A.Es gilt dann(detB)2 = 2 und detB∈Q, was keine Losung hat.
© Ja /© Nein
4 Das GleichungssystemuberZ7
1x1 + 4x2 + 2x3 = 1
4x1 + 1x2 + 6x3 = 2
2x1 + 1x2 + 2x3 = 3
hat eine eindeutige Losung(x1,x2,x3) in Z37.
Man berechnet die Determinante der KoeffizientenmatrixuberZ zu 16, alsouberZ7 zu2.
© Ja /© Nein
2 Es seienA,B,C,D ∈M(n×n,Q). Entscheiden Sie, ob die folgenden Aussagen wahr sind.
1 Es gilt stets det
(A B
C D
)= (detA) · (detD)− (detB) · (detC).
Losung:Betrachte als Gegenbeispiel
1 0 0 0
0 0 0 1
0 0 1 0
0 1 0 0
Diese Matrix hat Determinante−1, die falsche Regel wurde aber 0 liefern.
© wahr /© falsch
2 Genau dann gilt fur alleA,B,C,D ∈M(n×n,Q), dass
det
(A B
C D
)= (detA) · (detD)− (detB) · (detC)
ist, wennn = 1 ist.
Losung:Betrachte als Gegenbeispiel
1 0 0 0
0 0 0 1
0 0 1 0
0 1 0 0
Diese Matrix hat Determinante−1, die falsche Regel wurde aber 0 liefern.
© wahr /© falsch
3 Es gilt stets det
(0 B
C 0
)= (detB) · (detC).
Losung:Falsch, schon fur n = 1 gilt das nicht.
© wahr /© falsch
Es gilt stets det
(A B
C 0
)= (detB) · (detC).
Losung:Falsch, schon fur n = 1 gilt das nicht.
© wahr /© falsch
4 Genau dann gilt det
(0 B
C 0
)= (detB) · (detC) fur alle B,C ∈ M(n× n,Q),
wennn gerade ist.
Losung:Man sieht dies, indem man die erstenn und die letztenn Spalten vertauscht.Hierzu sindn2 Vertauschungen vonnoten, was nur fur geradesn gerade ist undso das Vorzeichen der Determinante nichtandert.
© wahr /© falsch
5 Es gilt stets det
(A 0
B C
)= (detA) · (detC).
Losung: Wahr, denn wir konnen schreiben
det
(A 0
B C
)= det
(A 0
B En
)·det
(En 0
0 C
).
Durchn-malige Entwicklung nach der jeweils letzten Spalte findet man
det
(A 0
B En
)= detA.
Analog ergibt sich durchn-malige Entwicklung nach der jeweils ersten Spalte
det
(En 0
0 C
)= detC.
© wahr /© falsch
Es gilt stets det
(A B
0 C
)= (detA) · (detC).
Losung: Wahr, denn wir konnen schreiben
det
(A B
0 C
)= det
(En 0
0 C
)·det
(A B
0 En
).
Durchn-malige Entwicklung nach der jeweils letzten Spalte findet man
det
(A B
0 En
)= detA.
Analog ergibt sich durchn-malige Entwicklung nach der jeweils ersten Spalte
det
(En 0
0 C
)= detC.
© wahr /© falsch
6 Es gilt stets det(A·B) = det(B·A).
Losung:
det(A·B) = det(A)det(B) = det(B)det(A) = det(B·A)
© wahr /© falsch
3 Es seienV, W undU Vektorraumeuber einem KorperK undϕ : V →W undψ : W →U lineare Abbil-dungen. Sind die folgenden Aussagen richtig?
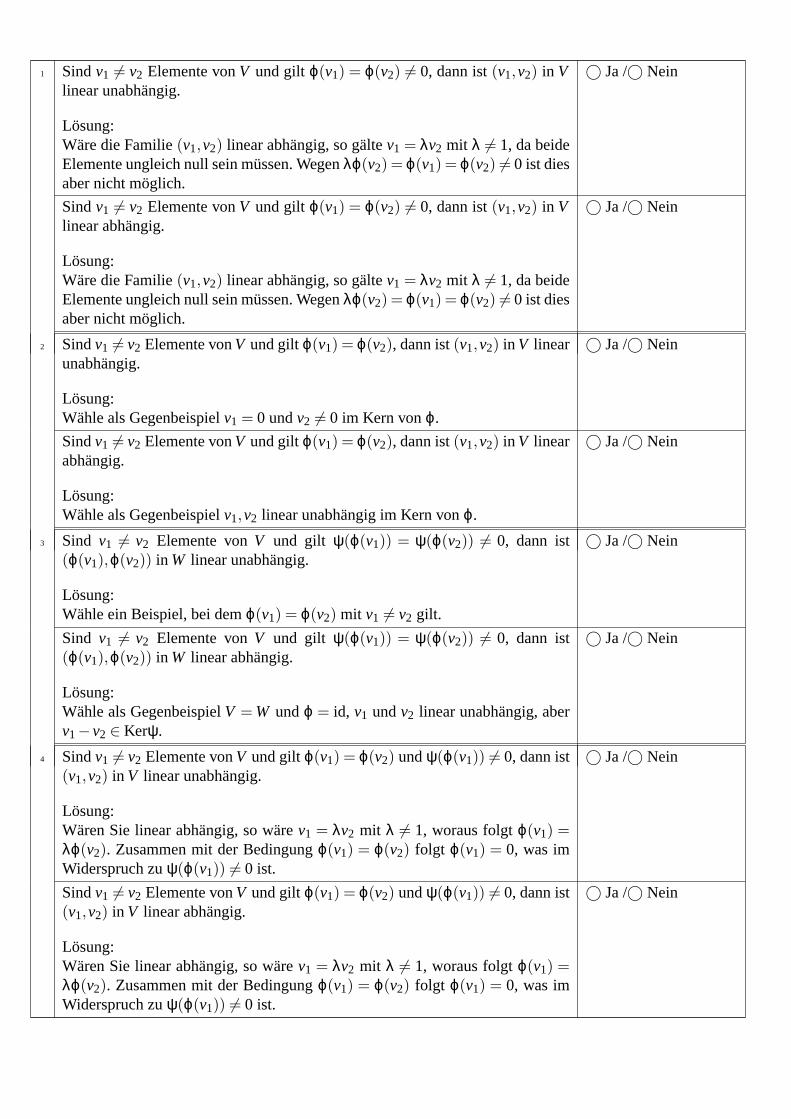
1 Sindv1 6= v2 Elemente vonV und gilt ϕ(v1) = ϕ(v2) 6= 0, dann ist(v1,v2) in Vlinear unabhangig.
Losung:Ware die Familie(v1,v2) linear abhangig, so galtev1 = λv2 mit λ 6= 1, da beideElemente ungleich null sein mussen. Wegenλϕ(v2) = ϕ(v1) = ϕ(v2) 6= 0 ist diesaber nicht moglich.
© Ja /© Nein
Sindv1 6= v2 Elemente vonV und gilt ϕ(v1) = ϕ(v2) 6= 0, dann ist(v1,v2) in Vlinear abhangig.
Losung:Ware die Familie(v1,v2) linear abhangig, so galtev1 = λv2 mit λ 6= 1, da beideElemente ungleich null sein mussen. Wegenλϕ(v2) = ϕ(v1) = ϕ(v2) 6= 0 ist diesaber nicht moglich.
© Ja /© Nein
2 Sindv1 6= v2 Elemente vonV und giltϕ(v1) = ϕ(v2), dann ist(v1,v2) in V linearunabhangig.
Losung:Wahle als Gegenbeispielv1 = 0 undv2 6= 0 im Kern vonϕ.
© Ja /© Nein
Sindv1 6= v2 Elemente vonV und giltϕ(v1) = ϕ(v2), dann ist(v1,v2) in V linearabhangig.
Losung:Wahle als Gegenbeispielv1,v2 linear unabhangig im Kern vonϕ.
© Ja /© Nein
3 Sind v1 6= v2 Elemente vonV und gilt ψ(ϕ(v1)) = ψ(ϕ(v2)) 6= 0, dann ist(ϕ(v1),ϕ(v2)) in W linear unabhangig.
Losung:Wahle ein Beispiel, bei demϕ(v1) = ϕ(v2) mit v1 6= v2 gilt.
© Ja /© Nein
Sind v1 6= v2 Elemente vonV und gilt ψ(ϕ(v1)) = ψ(ϕ(v2)) 6= 0, dann ist(ϕ(v1),ϕ(v2)) in W linear abhangig.
Losung:Wahle als GegenbeispielV = W undϕ = id, v1 undv2 linear unabhangig, aberv1−v2 ∈ Kerψ.
© Ja /© Nein
4 Sindv1 6= v2 Elemente vonV und giltϕ(v1) = ϕ(v2) undψ(ϕ(v1)) 6= 0, dann ist(v1,v2) in V linear unabhangig.
Losung:Waren Sie linear abhangig, so warev1 = λv2 mit λ 6= 1, woraus folgtϕ(v1) =λϕ(v2). Zusammen mit der Bedingungϕ(v1) = ϕ(v2) folgt ϕ(v1) = 0, was imWiderspruch zuψ(ϕ(v1)) 6= 0 ist.
© Ja /© Nein
Sindv1 6= v2 Elemente vonV und giltϕ(v1) = ϕ(v2) undψ(ϕ(v1)) 6= 0, dann ist(v1,v2) in V linear abhangig.
Losung:Waren Sie linear abhangig, so warev1 = λv2 mit λ 6= 1, woraus folgtϕ(v1) =λϕ(v2). Zusammen mit der Bedingungϕ(v1) = ϕ(v2) folgt ϕ(v1) = 0, was imWiderspruch zuψ(ϕ(v1)) 6= 0 ist.
© Ja /© Nein

5 Sindv1 undv2 Elemente vonV mit v1 = v2 und gilt ψ(ϕ(v1)) = ψ(ϕ(v2)) 6= 0,dann ist(ϕ(v1),ϕ(v2)) in W linear abhangig.
Losung:Es gilt sogarϕ(v1) = ϕ(v2), also ist die Familie linear abhangig.
© Ja /© Nein
Sindv1 undv2 Elemente vonV mit v1 = v2 und gilt ψ(ϕ(v1)) = ψ(ϕ(v2)) = 0,dann ist(ϕ(v1),ϕ(v2)) in W linear unabhangig.
Losung:Es gilt sogarϕ(v1) = ϕ(v2), also ist die Familie linear abhangig.
© Ja /© Nein
Die folgenden Aufgaben sind schriftlich zu bearbeiten.
4 (10 Punkte) SeiK ein Korper undA = (ai j ) ∈M(n×n,K). Zeigen Sie, dass dann gilt
det(ai j ) = det((−1)i+ jai j ) .
Hinweis: Weisen Sie nach, dass die Abbildung
M(n×n,K)→ K
A 7→ det((−1)i+ jai j )
eine Determinantenabbildung ist.
Losung:Wir zeigen, dass die genannte Abbildung eine Determinantenabbildung ist. Die Behauptung folgt dannaus der Eindeutigkeit der Determinantenabbildung.
(D1) Die zeilenweise Linearitat ist offensichtlich.
(D2) Stimmen diek-te undl -te Zeile vonA uberein, so unterscheiden sich diek-te undl -te Zeile der Ma-trix mit Eintragen(−1)i+ jai j um ein Vorzeichen(−1)l−k. Die Determinante der Matrix(−1)i+ jai j
verschwindet daher auch.
(D3) Offensichtlich gilt fur die Einheitsmatrix:
det((−1)i+ jδi j ) = det(δi j ) = 1.

5 (15 Punkte) SeiK ein Korper undV ein n-dimensionalerK-Vektorraum. Eine HyperebeneH in V ist ein(n−1)-dimensionaler affiner Unterraum vonV.
(i) Zeigen Sie: Eine TeilmengeA⊂ Kn ist eine Hyperebene genau dann, wenn es einen von Null ver-schiedenen Vektorφ im Vektorraum HomK(V,K) und einc∈ K gibt, so dass
A = {x∈ Kn |φ(x) = c}
gilt.
(ii) Betrachten Sie nun den FallK = R undV = Rn, versehen mit dem Standard-Skalarprodukt
〈v,w〉=n
∑i=1
viwi .
Zeigen Sie, dass die AbbildungRn → HomR(Rn,R)v 7→ ϕv
mit ϕv(w) = 〈v,w〉 ein Isomorphismus von reellen Vektorraumen ist.
(iii) Schließen Sie nun, dass sich jede Hyperebene inRn in der Form
A = {x∈ Rn | 〈v,x〉= c}
mit geeignetemc∈ R undv∈ Rn, v 6= 0 schreiben lasst. (Dies ist die sogenannte Hessesche Nor-malform einer Hyperebene imR3.)
Losung:
(i) Die Losungsmenge vonφ(x) = c ist nach Bemerkung 2.3.7 der Vorlesung entweder leer oderein affiner Unterraum der Dimension dimK Kerφ. Offenbar rgφ = 1, also nach der GradformeldimK Kerφ = n− rgφ = n−1. Die Menge ist nie leer: daφ nicht null ist, gibt es wenigstens einenVektorei in der Standardbasis, so dassφ(ei) = ci 6= 0. Somit istφ( c
ciei) = c und c
ciei ∈ A.
Sei nun umgekehrtA = p+U ein n−1-dimensionaler affiner Unterraum. Dann erganzen wir eineBasis{w1, . . . ,wn−1} vonU zu einer Basis{w1, . . . ,wn} vonV. Setzeφ(wi) = 0 fur i ≤ n−1 undφ(wn) = 1. Setzec := φ(p).
Dann istφ−1(c) = A, denn wegen
φ(p+u) = φ(p)+φ(u) = c+0 = c
fur u∈U ist A⊆ φ−1(c) und beide Raume haben Dimensionn−1.
(ii) Wegen der Bilinearitat des Skalarprodukts ist die Abbildung linear. Sie ist injektiv, denn aus〈v,w〉=0 fur allew∈V folgt v = 0. Da beide Vektorraume die gleiche Dimension haben, ist die Abbildungauch surjektiv, also ein Isomorphismus.
(iii) Es folgt aus (ii) sofort, dass es einv∈ Rn gibt, so dassφ(·) = 〈v, ·〉 gilt.
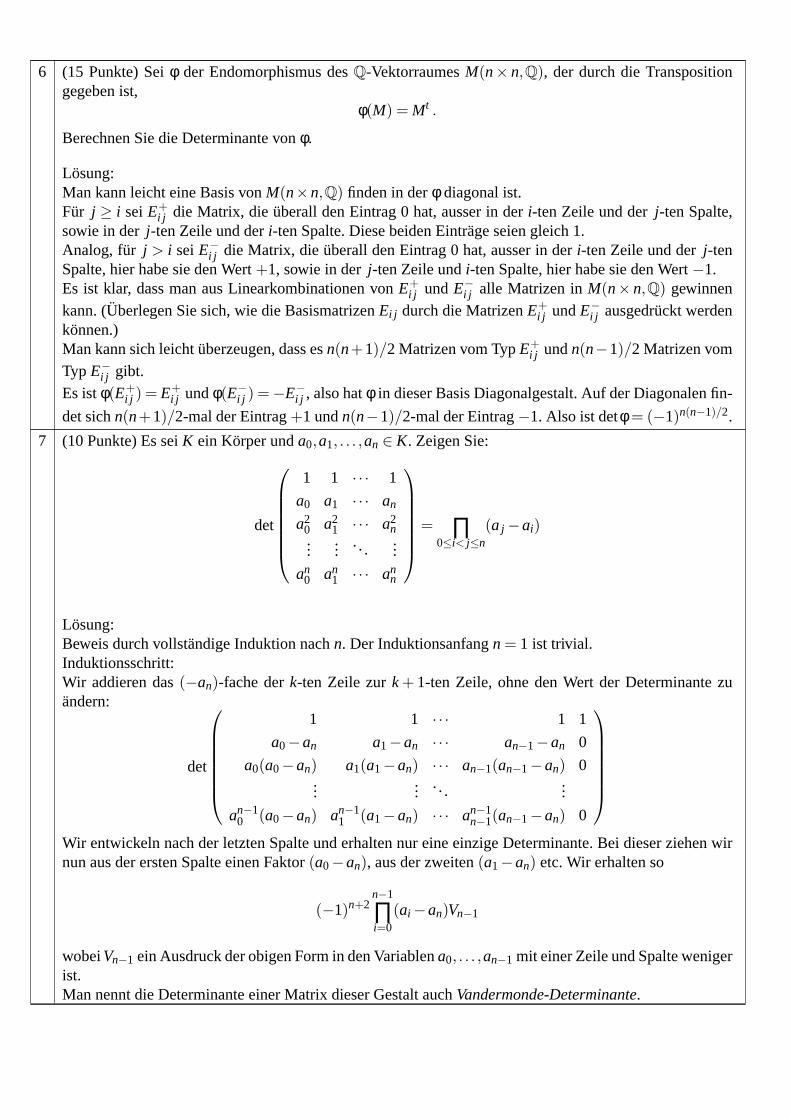
6 (15 Punkte) Seiφ der Endomorphismus desQ-VektorraumesM(n× n,Q), der durch die Transpositiongegeben ist,
φ(M) = Mt .
Berechnen Sie die Determinante vonφ.
Losung:Man kann leicht eine Basis vonM(n×n,Q) finden in derφ diagonal ist.Fur j ≥ i seiE+
i j die Matrix, dieuberall den Eintrag 0 hat, ausser in deri-ten Zeile und derj-ten Spalte,sowie in derj-ten Zeile und deri-ten Spalte. Diese beiden Eintrage seien gleich 1.Analog, fur j > i seiE−
i j die Matrix, dieuberall den Eintrag 0 hat, ausser in deri-ten Zeile und derj-tenSpalte, hier habe sie den Wert+1, sowie in derj-ten Zeile undi-ten Spalte, hier habe sie den Wert−1.Es ist klar, dass man aus Linearkombinationen vonE+
i j und E−i j alle Matrizen inM(n×n,Q) gewinnen
kann. (Uberlegen Sie sich, wie die BasismatrizenEi j durch die MatrizenE+i j undE−
i j ausgedruckt werdenkonnen.)Man kann sich leichtuberzeugen, dass esn(n+1)/2 Matrizen vom TypE+
i j undn(n−1)/2 Matrizen vomTyp E−
i j gibt.Es istφ(E+
i j ) = E+i j undφ(E−
i j ) =−E−i j , also hatφ in dieser Basis Diagonalgestalt. Auf der Diagonalen fin-
det sichn(n+1)/2-mal der Eintrag+1 undn(n−1)/2-mal der Eintrag−1. Also ist detφ = (−1)n(n−1)/2.
7 (10 Punkte) Es seiK ein Korper unda0,a1, . . . ,an ∈ K. Zeigen Sie:
det
1 1 · · · 1
a0 a1 · · · an
a20 a2
1 · · · a2n
......
......
an0 an
1 · · · ann
= ∏0≤i< j≤n
(a j −ai)
Losung:Beweis durch vollstandige Induktion nachn. Der Induktionsanfangn = 1 ist trivial.Induktionsschritt:Wir addieren das(−an)-fache derk-ten Zeile zurk+ 1-ten Zeile, ohne den Wert der Determinante zuandern:
det
1 1 · · · 1 1
a0−an a1−an · · · an−1−an 0
a0(a0−an) a1(a1−an) · · · an−1(an−1−an) 0...
......
...
an−10 (a0−an) an−1
1 (a1−an) · · · an−1n−1(an−1−an) 0
Wir entwickeln nach der letzten Spalte und erhalten nur eine einzige Determinante. Bei dieser ziehen wirnun aus der ersten Spalte einen Faktor(a0−an), aus der zweiten(a1−an) etc. Wir erhalten so
(−1)n+2n−1
∏i=0
(ai −an)Vn−1
wobeiVn−1 ein Ausdruck der obigen Form in den Variablena0, . . . ,an−1 mit einer Zeile und Spalte wenigerist.Man nennt die Determinante einer Matrix dieser Gestalt auchVandermonde-Determinante.

8 (15 Punkte):
Es seiI eine Indexmenge undAi mit i ∈ I eine Familie von Mengen. (Sie durfen I = N wahlen, wennIhnen das hilft.) Wir definieren das kartesische Produkt∏i∈I Ai als Menge aller Abbildungenf : I →∪Ai
mit f (i) ∈ Ai . Auf dem kartesischen Produkt betrachten wir fur jedesi ∈ I die kanonischen Projektionen
pi : ∏ j∈I A j −→ Ai
f 7→ f (i) .
(i) Beweisen Sie die folgende universelle Eigenschaft des kartesischen Produktes: Sei eine MengeQgegeben und sei fur jedesi ∈ I eine Abbildung
fi : Q−→ Ai
gegeben. Dann gibt es eineeindeutigeAbbildung
f : Q−→∏i∈I
Ai
so dassfi = pi ◦ f
gilt.Zeichnen Sie auch die relevanten kommutierenden Diagramme. Vergleichen Sie mit dem in der Vorlesungeingefuhrten Produkt von Vektorraumen.
Die folgende Definition ist das Analogon zur direkten Summe von Vektorraumen. Gegeben sei wiedereine Familie(Ai)i∈I von Mengen. Eine MengeP zusammen mit einer Familie von Injektionenιi : Ai → Pheißt Koprodukt, wenn es fur jede MengeB und jede Familie von Abbildungenfi : Ai → B genau eineAbbildung f : P→ B gibt, so dass fur alle i ∈ I gilt fi = f ◦ ιi .(ii) Zeigen Sie: alle MengenP mit dieser Eigenschaft, wennuberhaupt eine solche Menge existiert, sindisomorph.(iii) Eine solche Menge existiert: Geben Sie eine mogliche Wahl fur P an und weisen Sie nach, dass diesedie genannte Eigenschaft erfullt.
Losung:(i) Sei q∈ Q. Angenommen eine solche Abbildungf : Q→ ∏i∈I Ai existiert. Wir schreibenfq := f (q) :I →∪Ai . Dann muss wegen der universellen Eigenschaft gelten
fq(i) = pi( fq) = pi( f (q)) = (pi ◦ f )(q) = fi(q)
Dadurch ist fq fur jedesq eindeutig bestimmt undf somit eindeutig festgelegt. Umgekehrt erfullt diedurch fq(i) = fi(q) definierte Abbildung die geforderte Eigenschaft.(ii) Sei P′ eine weitere Menge, die diese Eigenschaft mit Abbildungenι′i : Ai → P′ erfullt. Diese Ei-genschaft auf die Abbildungenιi angewandt liefert eine eindeutig bestimmte Abbildungf : P′ → P mitιi = f ◦ ι′i . Die Eigenschaft vonP angewandt auf die Abbildungenι′i liefert eine eindeutig bestimmte Ab-bildung g : P→ P′, so dassι′i = g◦ ιi . Damit ist ι′i = g◦ f ◦ ι′i . Die Eigenschaft vonP′ auf ι′i angewandtliefert eineeindeutigeAbbildungh : P′→P′ mit ι′i = h◦ ι′i . Da dies mith= idP′ erfullt ist, folgt g◦ f = idP′.Genauso zeigt manf ◦g = idP.(iii) Eine mogliche Wahl fur P ist die disjunkte Vereinigung der MengenAi . Diese ist definiert alsti∈IAi := ∪i∈I{i}×Ai .Die Abbildungenι j sind die Inklusionen:
ι j : A j →ti∈IAi
a 7→ ( j,a)
Den Abgabeschluß der multiple choice Aufgaben sehen Sie oben auf dem Blatt. Die schriftlichen Aufgabenwerden in derUbungsgruppe am Montag, dem 21. April, abgegeben.
Ex 1, Qu 1, Var 1: [’Nein’]Ex 1, Qu 1, Var 2: [’Ja’]Ex 1, Qu 2, Var 1: [’Ja’]Ex 1, Qu 2, Var 2: [’Ja’]Ex 1, Qu 3, Var 1: [’Ja’]Ex 1, Qu 4, Var 1: [’Ja’]
Ex 2, Qu 1, Var 1: [’falsch’]Ex 2, Qu 2, Var 1: [’wahr’]Ex 2, Qu 3, Var 1: [’falsch’]Ex 2, Qu 3, Var 2: [’falsch’]Ex 2, Qu 4, Var 1: [’wahr’]Ex 2, Qu 5, Var 1: [’wahr’]Ex 2, Qu 5, Var 2: [’wahr’]Ex 2, Qu 6, Var 1: [’wahr’]
Ex 3, Qu 1, Var 1: [’Ja’]Ex 3, Qu 1, Var 2: [’Nein’]Ex 3, Qu 2, Var 1: [’Nein’]Ex 3, Qu 2, Var 2: [’Nein’]Ex 3, Qu 3, Var 1: [’Nein’]Ex 3, Qu 3, Var 2: [’Nein’]Ex 3, Qu 4, Var 1: [’Ja’]Ex 3, Qu 4, Var 2: [’Nein’]Ex 3, Qu 5, Var 1: [’Ja’]Ex 3, Qu 5, Var 2: [’Nein’]
Ubungsblatt 4zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph Schweigert
Erstellt am 28.04.2008, 16:32 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist28.04.2008, 08:00 Uhr.
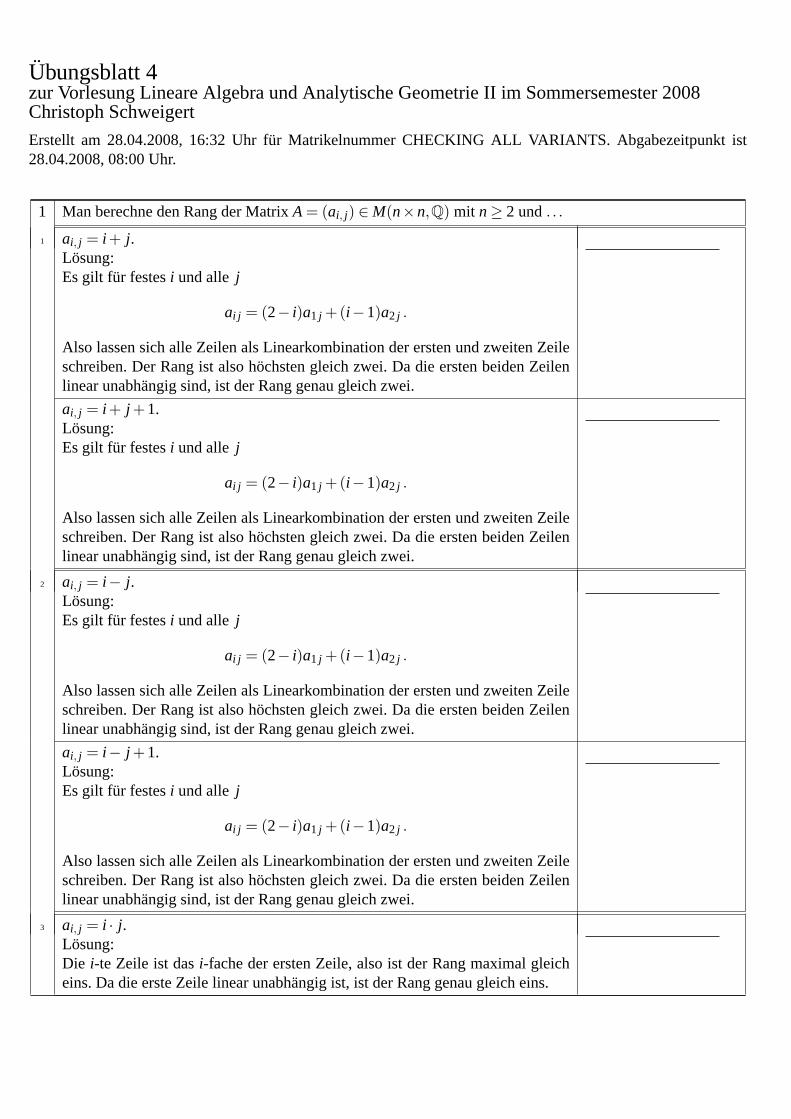
1 Man berechne den Rang der MatrixA = (ai, j) ∈M(n×n,Q) mit n≥ 2 und. . .
1 ai, j = i + j.Losung:Es gilt fur festesi und alle j
ai j = (2− i)a1 j +(i−1)a2 j .
Also lassen sich alle Zeilen als Linearkombination der ersten und zweiten Zeileschreiben. Der Rang ist also hochsten gleich zwei. Da die ersten beiden Zeilenlinear unabhangig sind, ist der Rang genau gleich zwei.
ai, j = i + j +1.Losung:Es gilt fur festesi und alle j
ai j = (2− i)a1 j +(i−1)a2 j .
Also lassen sich alle Zeilen als Linearkombination der ersten und zweiten Zeileschreiben. Der Rang ist also hochsten gleich zwei. Da die ersten beiden Zeilenlinear unabhangig sind, ist der Rang genau gleich zwei.
2 ai, j = i− j.Losung:Es gilt fur festesi und alle j
ai j = (2− i)a1 j +(i−1)a2 j .
Also lassen sich alle Zeilen als Linearkombination der ersten und zweiten Zeileschreiben. Der Rang ist also hochsten gleich zwei. Da die ersten beiden Zeilenlinear unabhangig sind, ist der Rang genau gleich zwei.
ai, j = i− j +1.Losung:Es gilt fur festesi und alle j
ai j = (2− i)a1 j +(i−1)a2 j .
Also lassen sich alle Zeilen als Linearkombination der ersten und zweiten Zeileschreiben. Der Rang ist also hochsten gleich zwei. Da die ersten beiden Zeilenlinear unabhangig sind, ist der Rang genau gleich zwei.
3 ai, j = i · j.Losung:Die i-te Zeile ist dasi-fache der ersten Zeile, also ist der Rang maximal gleicheins. Da die erste Zeile linear unabhangig ist, ist der Rang genau gleich eins.
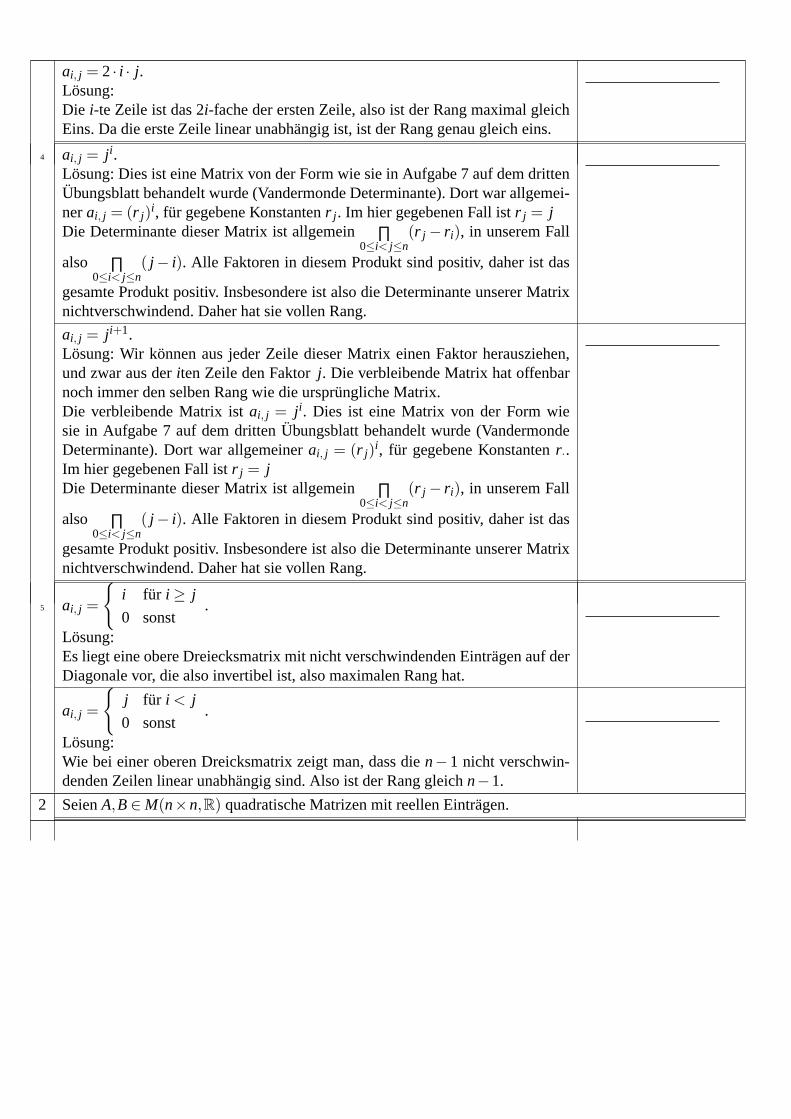
ai, j = 2· i · j.Losung:Die i-te Zeile ist das 2i-fache der ersten Zeile, also ist der Rang maximal gleichEins. Da die erste Zeile linear unabhangig ist, ist der Rang genau gleich eins.
4 ai, j = j i .Losung: Dies ist eine Matrix von der Form wie sie in Aufgabe 7 auf dem drittenUbungsblatt behandelt wurde (Vandermonde Determinante). Dort war allgemei-nerai, j = (r j)i , fur gegebene Konstantenr j . Im hier gegebenen Fall istr j = jDie Determinante dieser Matrix ist allgemein∏
0≤i< j≤n(r j − r i), in unserem Fall
also ∏0≤i< j≤n
( j − i). Alle Faktoren in diesem Produkt sind positiv, daher ist das
gesamte Produkt positiv. Insbesondere ist also die Determinante unserer Matrixnichtverschwindend. Daher hat sie vollen Rang.
ai, j = j i+1.Losung: Wir konnen aus jeder Zeile dieser Matrix einen Faktor herausziehen,und zwar aus deriten Zeile den Faktorj. Die verbleibende Matrix hat offenbarnoch immer den selben Rang wie die ursprungliche Matrix.Die verbleibende Matrix istai, j = j i . Dies ist eine Matrix von der Form wiesie in Aufgabe 7 auf dem drittenUbungsblatt behandelt wurde (VandermondeDeterminante). Dort war allgemeinerai, j = (r j)i , fur gegebene Konstantenr·.Im hier gegebenen Fall istr j = jDie Determinante dieser Matrix ist allgemein∏
0≤i< j≤n(r j − r i), in unserem Fall
also ∏0≤i< j≤n
( j − i). Alle Faktoren in diesem Produkt sind positiv, daher ist das
gesamte Produkt positiv. Insbesondere ist also die Determinante unserer Matrixnichtverschwindend. Daher hat sie vollen Rang.
5 ai, j =
{i fur i ≥ j
0 sonst.
Losung:Es liegt eine obere Dreiecksmatrix mit nicht verschwindenden Eintragen auf derDiagonale vor, die also invertibel ist, also maximalen Rang hat.
ai, j =
{j fur i < j
0 sonst.
Losung:Wie bei einer oberen Dreicksmatrix zeigt man, dass dien−1 nicht verschwin-denden Zeilen linear unabhangig sind. Also ist der Rang gleichn−1.
2 SeienA,B∈M(n×n,R) quadratische Matrizen mit reellen Eintragen.
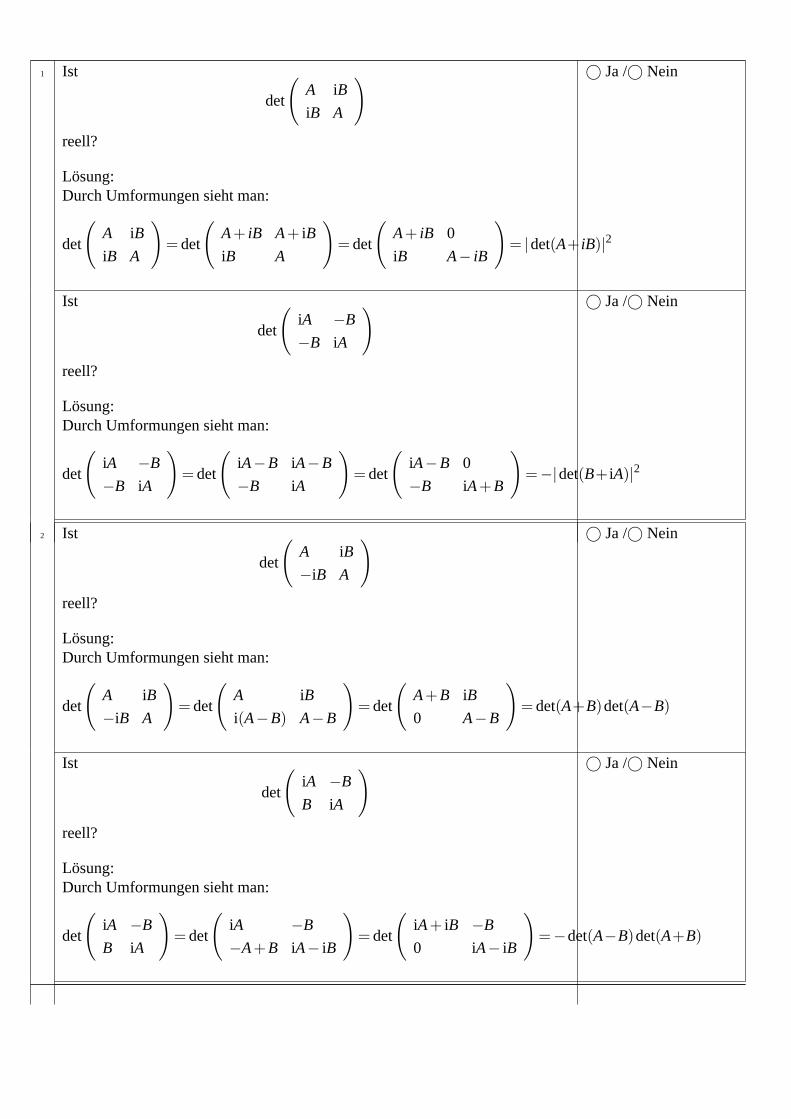
1 Ist
det
(A iB
iB A
)reell?
Losung:Durch Umformungen sieht man:
det
(A iB
iB A
)= det
(A+ iB A+ iB
iB A
)= det
(A+ iB 0
iB A− iB
)= |det(A+ iB)|2
© Ja /© Nein
Ist
det
(iA −B
−B iA
)reell?
Losung:Durch Umformungen sieht man:
det
(iA −B
−B iA
)= det
(iA−B iA−B
−B iA
)= det
(iA−B 0
−B iA+B
)=−|det(B+ iA)|2
© Ja /© Nein
2 Ist
det
(A iB
−iB A
)reell?
Losung:Durch Umformungen sieht man:
det
(A iB
−iB A
)= det
(A iB
i(A−B) A−B
)= det
(A+B iB
0 A−B
)= det(A+B)det(A−B)
© Ja /© Nein
Ist
det
(iA −B
B iA
)reell?
Losung:Durch Umformungen sieht man:
det
(iA −B
B iA
)= det
(iA −B
−A+B iA− iB
)= det
(iA+ iB −B
0 iA− iB
)=−det(A−B)det(A+B)
© Ja /© Nein
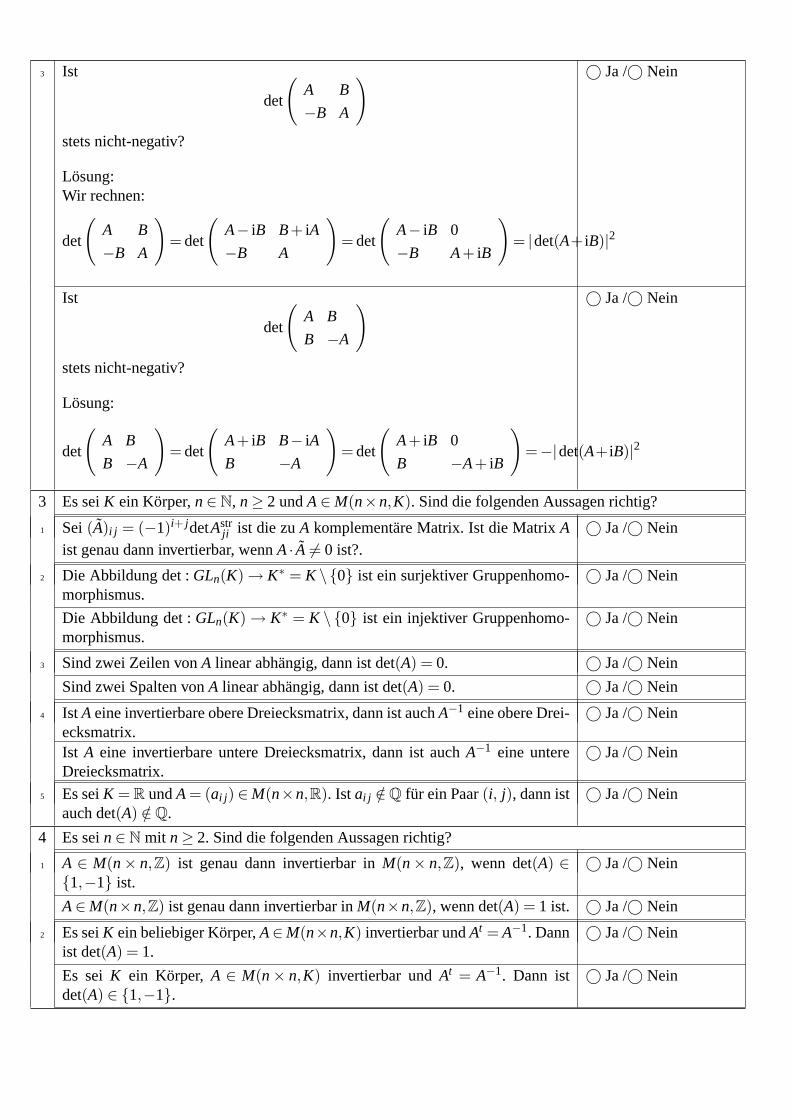
3 Ist
det
(A B
−B A
)stets nicht-negativ?
Losung:Wir rechnen:
det
(A B
−B A
)= det
(A− iB B+ iA
−B A
)= det
(A− iB 0
−B A+ iB
)= |det(A+ iB)|2
© Ja /© Nein
Ist
det
(A B
B −A
)stets nicht-negativ?
Losung:
det
(A B
B −A
)= det
(A+ iB B− iA
B −A
)= det
(A+ iB 0
B −A+ iB
)=−|det(A+ iB)|2
© Ja /© Nein
3 Es seiK ein Korper,n∈ N, n≥ 2 undA∈M(n×n,K). Sind die folgenden Aussagen richtig?
1 Sei(A)i j = (−1)i+ jdetAstrji ist die zuA komplementare Matrix. Ist die MatrixA
ist genau dann invertierbar, wennA· A 6= 0 ist?.© Ja /© Nein
2 Die Abbildung det :GLn(K)→ K∗ = K \{0} ist ein surjektiver Gruppenhomo-morphismus.
© Ja /© Nein
Die Abbildung det :GLn(K) → K∗ = K \ {0} ist ein injektiver Gruppenhomo-morphismus.
© Ja /© Nein
3 Sind zwei Zeilen vonA linear abhangig, dann ist det(A) = 0. © Ja /© Nein
Sind zwei Spalten vonA linear abhangig, dann ist det(A) = 0. © Ja /© Nein
4 Ist A eine invertierbare obere Dreiecksmatrix, dann ist auchA−1 eine obere Drei-ecksmatrix.
© Ja /© Nein
Ist A eine invertierbare untere Dreiecksmatrix, dann ist auchA−1 eine untereDreiecksmatrix.
© Ja /© Nein
5 Es seiK = R undA= (ai j ) ∈M(n×n,R). Ist ai j /∈Q fur ein Paar(i, j), dann istauch det(A) /∈Q.
© Ja /© Nein
4 Es sein∈ N mit n≥ 2. Sind die folgenden Aussagen richtig?
1 A ∈ M(n× n,Z) ist genau dann invertierbar inM(n× n,Z), wenn det(A) ∈{1,−1} ist.
© Ja /© Nein
A∈M(n×n,Z) ist genau dann invertierbar inM(n×n,Z), wenn det(A) = 1 ist. © Ja /© Nein
2 Es seiK ein beliebiger Korper,A∈M(n×n,K) invertierbar undAt = A−1. Dannist det(A) = 1.
© Ja /© Nein
Es seiK ein Korper, A ∈ M(n× n,K) invertierbar undAt = A−1. Dann istdet(A) ∈ {1,−1}.
© Ja /© Nein
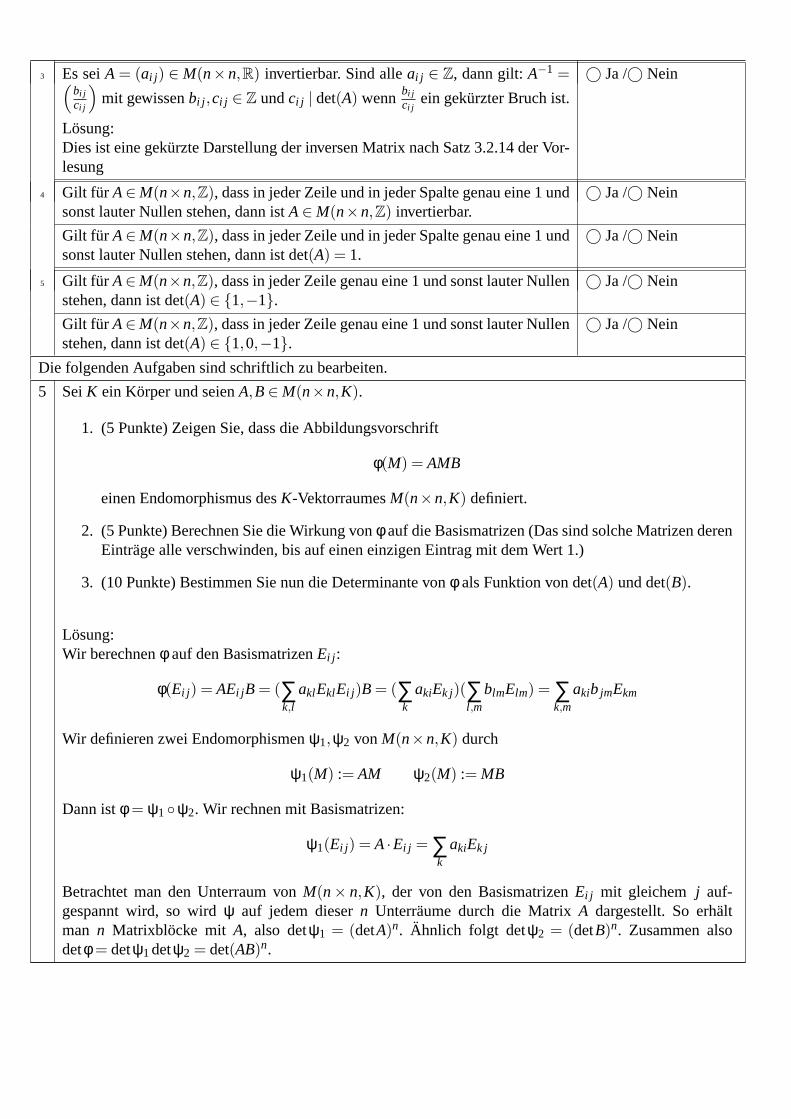
3 Es seiA = (ai j ) ∈ M(n×n,R) invertierbar. Sind alleai j ∈ Z, dann gilt:A−1 =(bi jci j
)mit gewissenbi j ,ci j ∈ Z undci j | det(A) wenn bi j
ci jein gekurzter Bruch ist.
Losung:Dies ist eine gekurzte Darstellung der inversen Matrix nach Satz 3.2.14 der Vor-lesung
© Ja /© Nein
4 Gilt f ur A∈M(n×n,Z), dass in jeder Zeile und in jeder Spalte genau eine 1 undsonst lauter Nullen stehen, dann istA∈M(n×n,Z) invertierbar.
© Ja /© Nein
Gilt f ur A∈M(n×n,Z), dass in jeder Zeile und in jeder Spalte genau eine 1 undsonst lauter Nullen stehen, dann ist det(A) = 1.
© Ja /© Nein
5 Gilt f ur A∈M(n×n,Z), dass in jeder Zeile genau eine 1 und sonst lauter Nullenstehen, dann ist det(A) ∈ {1,−1}.
© Ja /© Nein
Gilt f ur A∈M(n×n,Z), dass in jeder Zeile genau eine 1 und sonst lauter Nullenstehen, dann ist det(A) ∈ {1,0,−1}.
© Ja /© Nein
Die folgenden Aufgaben sind schriftlich zu bearbeiten.
5 SeiK ein Korper und seienA,B∈M(n×n,K).
1. (5 Punkte) Zeigen Sie, dass die Abbildungsvorschrift
φ(M) = AMB
einen Endomorphismus desK-VektorraumesM(n×n,K) definiert.
2. (5 Punkte) Berechnen Sie die Wirkung vonφ auf die Basismatrizen (Das sind solche Matrizen derenEintrage alle verschwinden, bis auf einen einzigen Eintrag mit dem Wert 1.)
3. (10 Punkte) Bestimmen Sie nun die Determinante vonφ als Funktion von det(A) und det(B).
Losung:Wir berechnenφ auf den BasismatrizenEi j :
φ(Ei j ) = AEi j B = (∑k,l
aklEklEi j )B = (∑k
akiEk j)(∑l ,m
blmElm) = ∑k,m
akib jmEkm
Wir definieren zwei Endomorphismenψ1,ψ2 vonM(n×n,K) durch
ψ1(M) := AM ψ2(M) := MB
Dann istφ = ψ1◦ψ2. Wir rechnen mit Basismatrizen:
ψ1(Ei j ) = A·Ei j = ∑k
akiEk j
Betrachtet man den Unterraum vonM(n× n,K), der von den BasismatrizenEi j mit gleichem j auf-gespannt wird, so wirdψ auf jedem diesern Unterraume durch die MatrixA dargestellt. So erhaltman n Matrixblocke mit A, also detψ1 = (detA)n. Ahnlich folgt detψ2 = (detB)n. Zusammen alsodetφ = detψ1detψ2 = det(AB)n.
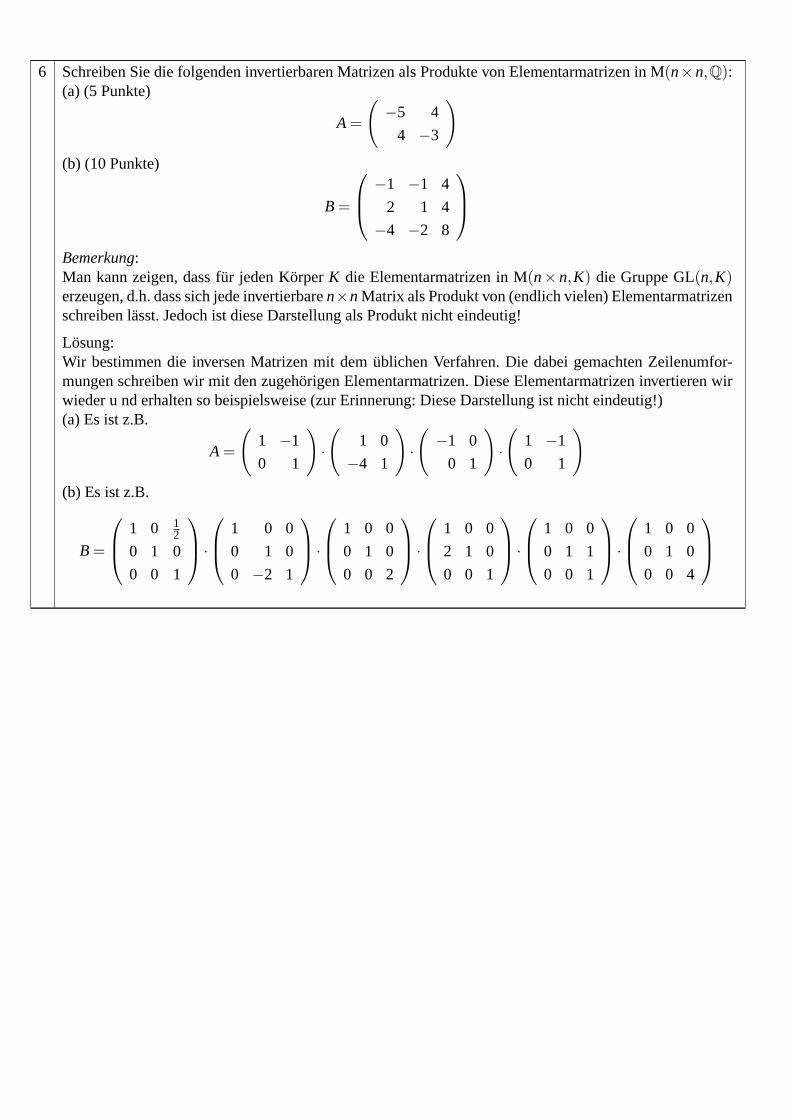
6 Schreiben Sie die folgenden invertierbaren Matrizen als Produkte von Elementarmatrizen in M(n×n,Q):(a) (5 Punkte)
A =
(−5 4
4 −3
)(b) (10 Punkte)
B =
−1 −1 4
2 1 4
−4 −2 8
Bemerkung:Man kann zeigen, dass fur jeden KorperK die Elementarmatrizen in M(n×n,K) die Gruppe GL(n,K)erzeugen, d.h. dass sich jede invertierbaren×n Matrix als Produkt von (endlich vielen) Elementarmatrizenschreiben lasst. Jedoch ist diese Darstellung als Produkt nicht eindeutig!
Losung:Wir bestimmen die inversen Matrizen mit demublichen Verfahren. Die dabei gemachten Zeilenumfor-mungen schreiben wir mit den zugehorigen Elementarmatrizen. Diese Elementarmatrizen invertieren wirwieder u nd erhalten so beispielsweise (zur Erinnerung: Diese Darstellung ist nicht eindeutig!)(a) Es ist z.B.
A =
(1 −1
0 1
)·
(1 0
−4 1
)·
(−1 0
0 1
)·
(1 −1
0 1
)(b) Es ist z.B.
B =
1 0 12
0 1 0
0 0 1
·
1 0 0
0 1 0
0 −2 1
·
1 0 0
0 1 0
0 0 2
·
1 0 0
2 1 0
0 0 1
·
1 0 0
0 1 1
0 0 1
·
1 0 0
0 1 0
0 0 4
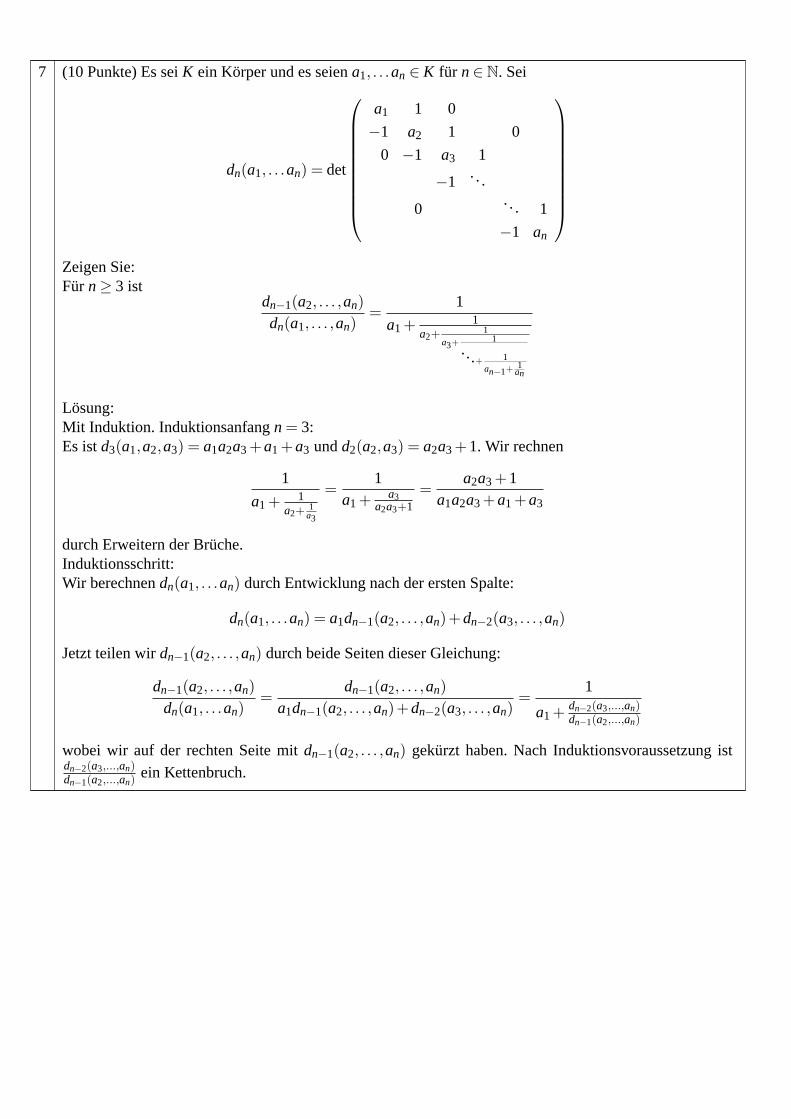
7 (10 Punkte) Es seiK ein Korper und es seiena1, . . .an ∈ K fur n∈ N. Sei
dn(a1, . . .an) = det
a1 1 0
−1 a2 1 0
0 −1 a3 1
−1...
0... 1
−1 an
Zeigen Sie:Fur n≥ 3 ist
dn−1(a2, . . . ,an)dn(a1, . . . ,an)
=1
a1 + 1a2+ 1
a3+ 1...+ 1
an−1+ 1an
Losung:Mit Induktion. Induktionsanfangn = 3:Es istd3(a1,a2,a3) = a1a2a3 +a1 +a3 undd2(a2,a3) = a2a3 +1. Wir rechnen
1
a1 + 1a2+ 1
a3
=1
a1 + a3a2a3+1
=a2a3 +1
a1a2a3 +a1 +a3
durch Erweitern der Bruche.Induktionsschritt:Wir berechnendn(a1, . . .an) durch Entwicklung nach der ersten Spalte:
dn(a1, . . .an) = a1dn−1(a2, . . . ,an)+dn−2(a3, . . . ,an)
Jetzt teilen wirdn−1(a2, . . . ,an) durch beide Seiten dieser Gleichung:
dn−1(a2, . . . ,an)dn(a1, . . .an)
=dn−1(a2, . . . ,an)
a1dn−1(a2, . . . ,an)+dn−2(a3, . . . ,an)=
1
a1 + dn−2(a3,...,an)dn−1(a2,...,an)
wobei wir auf der rechten Seite mitdn−1(a2, . . . ,an) gekurzt haben. Nach Induktionsvoraussetzung istdn−2(a3,...,an)dn−1(a2,...,an)
ein Kettenbruch.

8 Die folgende Aufgabe soll Ihnen zeigen, wie man die Determinante eines Endomorphismus definierenkann, ohne dass man vorher Determinanten von Matrizen einfuhrt.Sei K ein Korper, in dem 1+ 1 6= 0 gilt, undVi , 1≤ i ≤ r endlich-dimensionaleK-Vektorraume. EineAbbildung
ϕ : V1× . . .Vr → K
heißtr-Linearform, wenn sie in jedem ArgumentK-linear ist.
(i) (5 Punkte) Zeigen Sie, dass die Menge allerr-Linearformen einK-Vektorraum ist, und bestimmen Sieseine Dimension als Funktion der Dimensionen der VektorraumeVi .
Seien nun alle Vektorraume gleich, alsoV1 = V2 = . . .Vr = V. EineK-Linearformϕ : Vr → K heißtalter-nierend, wenn fur jedesr-Tupel von Vektorenvi ∈V gilt, dassϕ(v1,v2, . . . ,vr) = 0, sobald zweivi gleichsind.
(ii) (10 Punkte) Sei nunr = dimK V. Zeigen Sie, dass der Raum aller alternierenden dimK V-Linearformeneindimensional ist.
(iii) (5 Punkte) Schließen Sie aus Teil (ii), dass es fur jeden EndomorphismusA vonV genau einen Skalard(A) ∈ K gibt, so dass fur jede alternierender-Linearformϕ und allevi ∈V die Beziehung
ϕ(Av1,Av2, . . . ,Avr) = d(A)ϕ(v1,v2, . . . ,vr)
erfullt ist.
Wahlen Sie nun eine BasisB vonV und erhalten Sie einen Isomorphismus
MBB : End(V)→M(r× r,K)
(iv) (5 Punkte) Zeigen Sie: die Abbildung
M(r× r,K) → K
M 7→ d((MBB )−1M)
ist eine Determinantenabbildung.
Freiwillige Zusatzaufgaben:(a) Schließen Sie direkt aus der Definition, dass fur zwei EndomorphismenA1,A2 vonV gilt d(A1◦A2) =d(A1) ·d(A2).
(b) Ein EndomorphismusA ist genau dann bijektiv, wennd(A) 6= 0 gilt.

9 (Losung zur vorigen Aufgabe)(i)Die Vektorraumeigenschaft ist klar: Die Summe zweierr-Linearformen ist sicher wieder in jedem Argu-mentK-linear, ebenso das Produkt jeder Multilinearform mit einem Element ausK.Per Definition ist jede Multilinearform (wie gewohnliche Linearformen auch) durch ihre Werte auf Ba-sisvektoren derVi festgelegt. Nachdem wir in jedemVi eine Basis gewaehlt haben gibt es offensichtlichDr = (dimK V1)(dimK V2) · · ·(dimK Vr) verschiedener-Tupel von Basisvektoren der einzelnenVi . Also istdie Dimension des Raumes derr-Linearformen gleichDr .(ii)Halten wir zuallererst fest, dassϕ das Vorzeichen wechseln muss, wenn zwei seiner Argumente vertauschtwerden. Dies folgt mit der gleichen Argumentation wie bei der Determinante.Sei nunB := {ei}r
i=1 eine geordnete Basis vonV. Sei
ϕB := ϕ(e1,e2, . . . ,er) ∈ K .
Man sieht nun, dass die alternierende Linearformϕ schon durch dasϕB ∈ K eindeutig festgelegt ist. Dennum ϕ(v,w, . . .) zu berechnen entwickeln wir alle Argumente in der BasisB , ziehen mittels Multilinea-ritat alle Entwicklungskoeffizienten ausϕ(. . .) heraus. Alle Terme in denen mindestens ein Basisvektordoppelt vorkommt verschwinden; wir ordnen ordnen die verbleibenden Basisvektoren (mittels der alter-nierenden Eigenschaft) in aufsteigender Reihenfolge. Also sind alle verbleibenden Terme proportional zuϕB . (Dieses Argument sollte mit dem Beweis von Satz 3.3.6 der Vorlesung verglichen werden!)Zu jeder Wahl vonϕB ∈ K gibt es also genau eine alternierende dimKV-Linearform. Diese bilden dahereinen eindimensionalen Vektorraum.(iii)Man pruft leicht, dass die linke Seite der Gleichung, als Funktion dervi , selbst eine alternierende dimKV-Linearform ist.Die Aussage folgt dann aus der Tatsache, dass der Raum dieser Formen eindimensional ist.
(iv) Aus der definierenden Gleichungϕ(Av1,Av2, . . . ,Avr) = d(A)ϕ(v1,v2, . . . ,vr), sowie aus den definie-renden Eigenschaften vonϕ folgen direkt die drei Axiome der Determinantenabbildung: die Spaltenlinea-ritat (D1) folgt aus der Multilinearitat vonϕ, (D2) folgt, daϕ alternierend sein soll, und die Normierung(D3) ist offensichtlich.
Losungen zu den Zusatzaufgaben(a) Wir wenden die definierende Gleichung
ϕ(Av1,Av2, . . . ,Avr) = d(A)ϕ(v1,v2, . . . ,vr)
zweimal hintereinander an.
(b) SeiAbijektiv; dann existiert ein EndomorphismusA−1 mit A◦A−1 = idV . Aus der ersten Zusatzaufgabefolgt d(A) ·d(A−1) = 1, so dassd(A) 6= 0 gelten muss.Ist A nicht bijektiv, so istA auch nicht injektiv. Also existiertv1 ∈ V,v1 6= 0 mit Av1 = 0. Erganzev1
zu einer Basis{v1, . . .vn} von V. Es folgt fur eine nicht-verschwindende alternierende Multilinearformϕ(v1,v2, . . . ,vr) 6= 0, aberϕ(Av1,Av2, . . . ,Avr) = 0 auf Grund der Linearitat im ersten Argument. Somitmussd(A) = 0 gelten.
Den Abgabeschluß der multiple choice Aufgaben sehen Sie oben auf dem Blatt. Die schriftlichen Aufgabenwerden in derUbungsgruppe am Montag, dem 28. April, abgegeben.
Ex 1, Qu 1, Var 1: [’2’]Ex 1, Qu 1, Var 2: [’2’]Ex 1, Qu 2, Var 1: [’2’]Ex 1, Qu 2, Var 2: [’2’]Ex 1, Qu 3, Var 1: [’1’]Ex 1, Qu 3, Var 2: [’1’]Ex 1, Qu 4, Var 1: [’n’]Ex 1, Qu 4, Var 2: [’n’]Ex 1, Qu 5, Var 1: [’n’]Ex 1, Qu 5, Var 2: [’n-1’]
Ex 2, Qu 1, Var 1: [’Ja’]Ex 2, Qu 1, Var 2: [’Ja’]Ex 2, Qu 2, Var 1: [’Ja’]Ex 2, Qu 2, Var 2: [’Ja’]Ex 2, Qu 3, Var 1: [’Ja’]Ex 2, Qu 3, Var 2: [’Nein’]
Ex 3, Qu 1, Var 1: [’Ja’]Ex 3, Qu 2, Var 1: [’Ja’]Ex 3, Qu 2, Var 2: [’Nein’]Ex 3, Qu 3, Var 1: [’Ja’]Ex 3, Qu 3, Var 2: [’Ja’]Ex 3, Qu 4, Var 1: [’Ja’]Ex 3, Qu 4, Var 2: [’Ja’]Ex 3, Qu 5, Var 1: [’Nein’]
Ex 4, Qu 1, Var 1: [’Ja’]Ex 4, Qu 1, Var 2: [’Nein’]Ex 4, Qu 2, Var 1: [’Nein’]Ex 4, Qu 2, Var 2: [’Ja’]Ex 4, Qu 3, Var 1: [’Ja’]Ex 4, Qu 4, Var 1: [’Ja’]Ex 4, Qu 4, Var 2: [’Nein’]Ex 4, Qu 5, Var 1: [’Nein’]Ex 4, Qu 5, Var 2: [’Ja’]
Ubungsblatt 5zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph Schweigert
Erstellt am 05.05.2008, 16:28 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist05.05.2008, 08:00 Uhr.
1 Berechnen Sie das Signum der folgenden Permutationen.Losung: Wir fuhren die obere Zeile in die untere durch eine Folge von Vertauschungen benachbarterEintrage aus. Jede solche Vertauschung traegt einen Faktor(−1) bei. Das Signum ist das Produkt all dieserFaktoren, also+1 wenn wir insgesamt eine gerade Anzahl an Paarvertauschungen ausfuhren mussen,−1bei einer ungeraden Zahl.Sei zum Beispiel die Permutation(
1 2 3 4 5 6 7 8 9 10 11 12
5 7 10 2 3 11 12 8 6 4 9 1
)betrachtet.Im diesem Fall bewegen wir z.B. zuerst die 1 an die letzte Stelle. Dazu mussen wir an der 2, der 3, der4, usw., bis schließlich an der 12 vorbei. Das sind insgesamt 11 Vertauschungen, liefert also einen Faktor−1.Als nachstes mussen wir die 9 an the vorletzte Stelle bringen. Dazu mussen wir an 10, 11 und 12 vorbei.Es gibt also wieder einen Faktor -1.Auf diese Weise fahrt man fort.Fur zyklische Permutationen ist allgemein das Signum von(
1 . . . n−1 n
2 . . . n 1
)
gegeben durch(−1)n.
1
(1 2 3
2 3 1
)© +1 /© -1(
1 2 3
3 1 2
)© +1 /© -1
2
(1 2 3 4
2 3 4 1
)© +1 /© -1(
1 2 3 4
4 1 2 3
)© +1 /© -1
3
(1 2 3 4 5
2 3 4 5 1
)© +1 /© -1(
1 2 3 4 5
5 1 2 3 4
)© +1 /© -1
4
(1 2 3 4 5 6 7 8 9 10 11 12
5 4 6 3 11 9 1 10 8 2 12 7
)© +1 /© -1
(1 2 3 4 5 6 7 8 9 10 11 12
4 2 10 3 12 1 5 8 7 9 6 11
)© +1 /© -1
2 Es seiSθ =(
cos(2θ)sin(2θ)
sin(2θ)−cos(2θ)
)eine Spiegelungsmatrix undDθ =
(cos(θ)sin(θ)
−sin(θ)cos(θ)
)eine Drehmatrix. Wir
konnen diese Matrizen entweder als Elemente inM(2×2,R) oder inM(2×2,C) auffassen. Prufen Siedie folgenden Aussagen fur allgemeinesθ.Losung:Das charakteristische Polynom vonSθ ist
(λ−cos(2θ))(λ+cos(2θ))− (sin(2θ))2 = λ2−1 = (λ−1)(λ+1) .
Die Eigenwerte sind alsoλ = 1 undλ = −1. Man pruft leicht, dass die dazugehorigen Eigenraume die
Form Eig(Sθ,1) = spanR((
cosθsinθ
)) und Eig(Sθ,−1) = spanR(
(−sinθcosθ
)) haben.
Das charakteristische Polynom vonDθ ist
(λ−cosθ)2 +(sinθ)2 = λ2−2cos(θ)λ+1 = (λ−cosθ+ i sinθ)(λ−cosθ− i sinθ) .
Fur allgemeineθ gibt es also nuruberC Eigenwerte, nichtuberR. Uber C sind die Eigenwerteλ1,2 =cosθ± i sinθ. Dazu gehoren die Eigenraume
Eig(Dθ,λ1,2) = spanC
(1∓i
).
1 Aufgefasst als Element vonM(2×2,R) hat Sθ die Eigenwerteλ1 = +1, λ2 =−1.
©Wahr /© Falsch
Aufgefasst als Element vonM(2× 2,R) hat Sθ die Eigenwerteλ1 = cos(θ),λ2 = sin(θ).
©Wahr /© Falsch
2 Aufgefasst als Element vonM(2×2,C) hatDθ rein reelle Eigenwerte. ©Wahr /© Falsch
Aufgefasst als Element vonM(2×2,C) hatDθ rein imaginare Eigenwerte. ©Wahr /© Falsch
3 Aufgefasst als Element vonM(2× 2,C) hat Dθ die Eigenwerteλ1 = cos(θ),λ2 = sin(θ)
©Wahr /© Falsch
Aufgefasst als Element vonM(2×2,C) hatDθ die Eigenwerteλ1,2 = cos(θ)±i sin(θ).
©Wahr /© Falsch
4 spanR(
cos(θ)sin(θ)
)ist ein Eigenraum vonSθ ∈M(2×2,R). ©Wahr /© Falsch
spanR(
sin(θ)cos(θ)
)ist ein Eigenraum vonSθ ∈M(2×2,R). ©Wahr /© Falsch
5 spanC(
1i
)ist ein Eigenraum vonDθ ∈M(2×2,C). ©Wahr /© Falsch
spanC(
i1
)ist ein Eigenraum vonDθ ∈M(2×2,C). ©Wahr /© Falsch
3 Es seiK ein Korper,V einn-dimensionalerK-Vektorraum (1≤ n < ∞) undϕ ∈ EndV.
1 Ist 1 einziger Eigenwert vonϕ, so istϕ = idV .Losung:Gegenbeispiel: (
1 1
0 1
).
© Ja /© Nein
Ist 0 einziger Eigenwert vonϕ, so istϕ = 0.Losung:Gegenbeispiel: (
0 1
0 0
).
© Ja /© Nein
2 Es gibta∈ K, das nicht Eigenwert irgendeines Endomorphismus vonV ist.Losung:Nein,a ist Eigenwert vona· Id.
© Ja /© Nein
Es gibt einen Vektorv∈V ungleich Null, der fur keinen Endomorphismus vonV ein Eigenvektor ist.Losung:Nein, jedesv ungleich Null ist Eigenvektor der Identitatsabbildung.
© Ja /© Nein
3 ϕ hat mindestens einen Eigenwert.Losung:Gegenbeispiel: allgemeine Drehmatrix imR2.
© Ja /© Nein
Ist ϕ nicht invertierbar, so hatϕ mindestens einen Eigenwert.Losung:Wenn der Kern nicht verschwindet, gibt es Eigenvektoren zum Eigenwert 0.
© Ja /© Nein
Ist ϕ nicht invertierbar, so hatϕ nur einen Eigenwert.Losung:Gegenbeispiel: 1 0 0
0 2 0
0 0 0
.
© Ja /© Nein
4 Die Summe von zwei Eigenvektoren vonϕ ist stets auch ein Eigenvektor vonϕ.Losung:Nur wenn die Eigenwerteubereinstimmen.
© Ja /© Nein
Die Summe von zwei Eigenvektoren zu verschiedenen Eigenwerten ist kein Ei-genvektor vonϕ.Losung:Klar.
© Ja /© Nein
5 Ist ϕ2 = ϕ undϕ 6= idV , so hatϕ genau zwei Eigenwerte.Losung:Gegenbeispiel: die Nullabbildung.
© Ja /© Nein
Ist ϕ3 = ϕ undϕ 6= idV , so hatϕ genau drei Eigenwerte.Losung:Gegenbeispiel: die Nullabbildung.
© Ja /© Nein
4 Es seiK ein Korper,V ein endlich-dimensionaler Vektorraum undϕ : V →V ein Endomorphismus vonV.Sind die folgenden Aussagenuber Eigenvektoren richtig?
1 Wenn die Dimension vonV gleichn≥ 2 ist und ein linear unabhangiges(n−1)-Tupel (v1, . . . ,vn−1) von Eigenvektoren vonϕ existiert, dann gibt es auch einlinear unabhangigesn-Tupel(v1, . . . ,vn) von Eigenvektoren vonϕ.Losung:Gegenbeispiel (
1 1
0 1
)
© Ja /© Nein
Wenn die Dimension vonV mindestens 2 ist undϕ einen Eigenvektor besitzt,dann hatϕ mindestens 2 linear unabhangige Eigenvektoren.Losung:Gegenbeispiel (
1 1
0 1
)© Ja /© Nein
2 Der Endomorphismusϕ hat mindestens einen Eigenvektor.Losung:Gegenbeispiel: nichttriviale 2×2 DrehmatrixuberR.
© Ja /© Nein
Es gibt einen Endomorphismusϕ, der keinen Eigenvektor besitzt.Losung:Beispiel: nichttriviale 2×2 DrehmatrixuberR.
© Ja /© Nein
3 Die Summe zweier Eigenvektoren vonϕ zu verschiedenen Eigenwerten ist einEigenvektor vonϕ.
© Ja /© Nein
Die Differenz zweier Eigenvektoren vonϕ zu verschiedenen Eigenwerten ist einEigenvektor vonϕ.
© Ja /© Nein
4 Jede nichtverschwindende Linearkombination von zwei Eigenvektoren vonϕzum gleichen Eigenwert ist ein Eigenvektor.
© Ja /© Nein
Die Summe zweier Eigenvektoren vonϕ zum gleichen Eigenwert ist entwederder Nullvektor oder ein Eigenvektor.
© Ja /© Nein
Die folgenden Aufgaben sind schriftlich zu bearbeiten.
5 (5 Punkte) SeiK ein nicht notwendigerweise kommutativer Ring mit Eins. Sei daruber hinaus die Abbil-dung
M(2×2,K) −→ K(a b
c d
)7→ ad−bc
eine Determinantenabbildung. Zeigen Sie, dass aus der Existenz der Determinantenabbildung folgt, dassK kommutativ ist.Losung:Seiena,b∈ K beliebig. Unter Verwendung der definierenden Eigenschaften von Determinantenabbildun-gen konnen wir die folgenden Umformungen vornehmen:
ab= abdet
(1 0
0 1
)= adet
(1 0
0 b
)= det
(a 0
0 b
)= bdet
(a 0
0 1
)= badet
(1 0
0 1
)= ba.

6 Die Fibonacci-Folge(an)n∈N ist definiert durch die zwei Anfangswerte
a0 = 0
a1 = 1
und die Rekursionsformelan+2 = an+1 +an .
Da die Rekursionsvorschrift linear ist, kann man Vektoren
vn :=
(an+1
an
)
einfuhren und die Rekursionsvorschrift durch eine MatrixA beschreiben:
vk+1 = A·vk .
1. (5 Punkte) Bestimmen Sie die MatrixA und finden Sie deren Eigenwerte und Eigenvektoren.
2. (10 Punkte) Diagonalisieren Sie die MatrixA. Betrachten Sie mit Hilfe der diagonalisierten Matrixdie zweite Komponente vonvn und geben Sie eine explizite Formel fur ak als Funktion vonk an.
Losung:Offenbar ist
A =
(1 1
1 0
).
Das gesuchte Elementak ist die zweite Komponente des Vektorsvk = Ak · v0 = Ak ·
(1
0
), also der
Eintrag(Ak)21 der MatrixAk.Das charakteristische Polynom vonA lautetχA(λ) = λ2− λ− 1. Dessen Nullstellen, und damit die Ei-
genwerte vonA, sind λ1 = 1+√
52 und λ2 = 1−
√5
2 zu den Eigenraumen Eig(A,λ1) = spanR
(1
λ1−1
)
und Eig(A,λ2) = spanR
(1
λ2−1
). Eine Transformationsmatrix auf eine Eigenbasis ist alsoS−1 =(
1 1
λ1−1 λ2−1
). Deren Inverse berechnet sich zuS= 1
λ2−λ1
(λ2−1 −1
1−λ1 1
). Es gilt
Ak = S−1
(λk
1 0
0 λk2
)S.
Den linken unteren Eintrag dieser Matrix berechnet man leicht zu
ak =λk
1−λk2√
5.
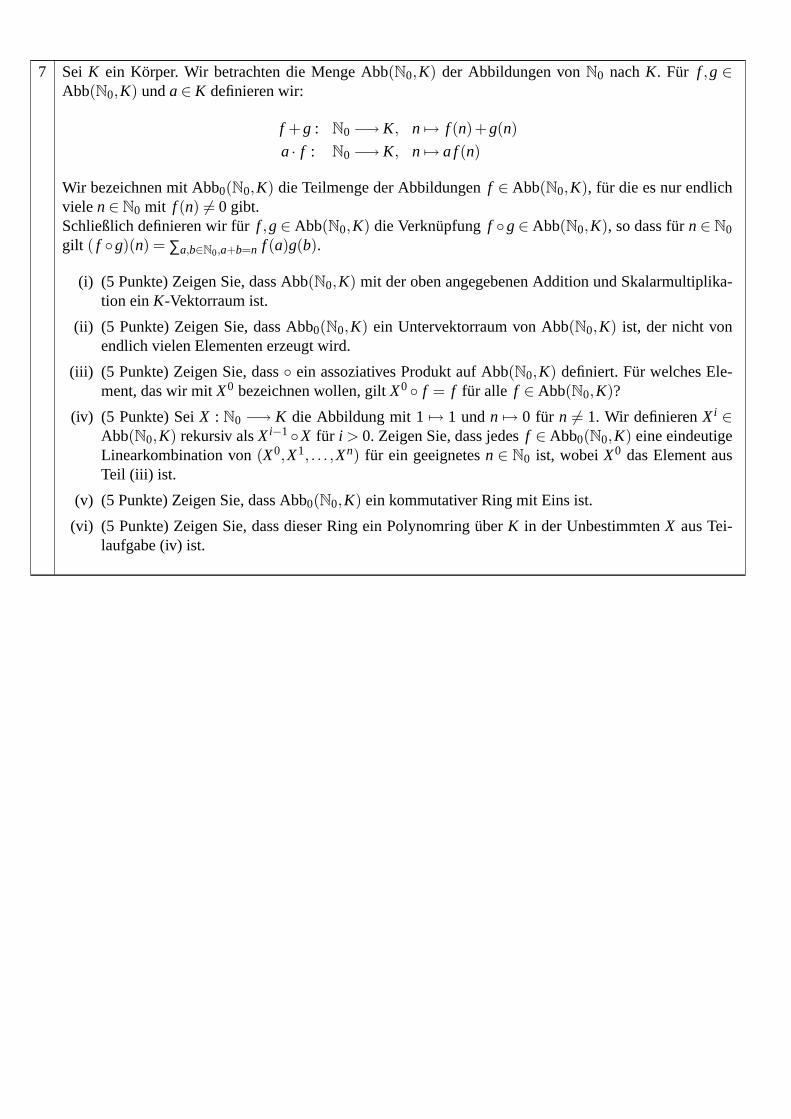
7 Sei K ein Korper. Wir betrachten die Menge Abb(N0,K) der Abbildungen vonN0 nachK. Fur f ,g ∈Abb(N0,K) unda∈ K definieren wir:
f +g : N0−→ K, n 7→ f (n)+g(n)a· f : N0−→ K, n 7→ a f(n)
Wir bezeichnen mit Abb0(N0,K) die Teilmenge der Abbildungenf ∈ Abb(N0,K), fur die es nur endlichvielen∈ N0 mit f (n) 6= 0 gibt.Schließlich definieren wir fur f ,g∈ Abb(N0,K) die Verknupfung f ◦g∈ Abb(N0,K), so dass fur n∈ N0
gilt ( f ◦g)(n) = ∑a,b∈N0,a+b=n f (a)g(b).
(i) (5 Punkte) Zeigen Sie, dass Abb(N0,K) mit der oben angegebenen Addition und Skalarmultiplika-tion einK-Vektorraum ist.
(ii) (5 Punkte) Zeigen Sie, dass Abb0(N0,K) ein Untervektorraum von Abb(N0,K) ist, der nicht vonendlich vielen Elementen erzeugt wird.
(iii) (5 Punkte) Zeigen Sie, dass◦ ein assoziatives Produkt auf Abb(N0,K) definiert. Fur welches Ele-ment, das wir mitX0 bezeichnen wollen, giltX0◦ f = f fur alle f ∈ Abb(N0,K)?
(iv) (5 Punkte) SeiX : N0 −→ K die Abbildung mit 17→ 1 undn 7→ 0 fur n 6= 1. Wir definierenXi ∈Abb(N0,K) rekursiv alsXi−1◦X fur i > 0. Zeigen Sie, dass jedesf ∈ Abb0(N0,K) eine eindeutigeLinearkombination von(X0,X1, . . . ,Xn) fur ein geeignetesn ∈ N0 ist, wobeiX0 das Element ausTeil (iii) ist.
(v) (5 Punkte) Zeigen Sie, dass Abb0(N0,K) ein kommutativer Ring mit Eins ist.
(vi) (5 Punkte) Zeigen Sie, dass dieser Ring ein PolynomringuberK in der UnbestimmtenX aus Tei-laufgabe (iv) ist.

8 SeiK ein Korper undV einK-Vektorraum und seienφ,ψ ∈ End(V). Zeigen Sie:(a) (5 Punkte) Istv∈V Eigenvektor vonφ◦ψ zum Eigenwertλ, und istψ(v) 6= 0, so istψ(v) Eigenvektorvon ψ◦φ zum Eigenwertλ.(b) (5 Punkte) IstV endlich-dimensional, so habenφ◦ψ undψ◦φ die gleichen Eigenwerte.(c) (5 Punkte) Habenφ◦ψ undψ◦φ auch die gleichen Eigenvektoren? Geben Sie einen Beweis oder einGegenbeispiel.
Losung:(a) Wir rechnen unter Benutzung von Assoziativitat der Komposition von Abbildungen:
ψ◦φ(ψ(v)) = ψ((φ◦ψ)(v)) = ψ(λv) = λψ(v)
Also ist ψ(v) Eigenvektor zum Eigenwertλ.(b) Wir zeigen, dass alle Eigenwerte vonφ ◦ψ auch Eigenwerte vonψ ◦ φ sind. Die Aussage folgt danndaraus, dass die betrachtete Situation symmetrisch ist.Seiλ ein Eigenwert vonφ◦ψ mit Eigenvektorv. Ist ψ(v) 6= 0, so folgt mit (a), dassλ auch Eigenwert vonψ ◦ φ ist. Sei nunψ(v) = 0, alsov∈ kerψ. Dann ist auchλ = 0. Wir mussen also nur zeigen, dassψ ◦ φnichttrivialen Kern hat. Da 0 ein Eigenwert vonφ◦φ ist, ist
0 = det(φ◦ψ) = detφdetψ = detψdetφ = det(ψ◦φ)
Also hat auchψ◦φ nichtverschwindenden Kern.(c) Gegenbeispiel: Betrachten SieR2 und die Matrizen
A =
(1 1
0 0
), B =
(1 1
0 −1
)
Dann habenABundBAverschiedene Eigenvektoren.
Den Abgabeschluß der multiple choice Aufgaben sehen Sie oben auf dem Blatt. Die schriftlichen Aufgabenwerden in derUbungsgruppe am Montag, dem 5. Mai, abgegeben.
Ex 1, Qu 1, Var 1: [’+1’]Ex 1, Qu 1, Var 2: [’+1’]Ex 1, Qu 2, Var 1: [’-1’]Ex 1, Qu 2, Var 2: [’-1’]Ex 1, Qu 3, Var 1: [’+1’]Ex 1, Qu 3, Var 2: [’+1’]Ex 1, Qu 4, Var 1: [’+1’]Ex 1, Qu 4, Var 2: [’-1’]
Ex 2, Qu 1, Var 1: [’Wahr’]Ex 2, Qu 1, Var 2: [’Falsch’]Ex 2, Qu 2, Var 1: [’Falsch’]Ex 2, Qu 2, Var 2: [’Falsch’]Ex 2, Qu 3, Var 1: [’Falsch’]Ex 2, Qu 3, Var 2: [’Wahr’]Ex 2, Qu 4, Var 1: [’Wahr’]Ex 2, Qu 4, Var 2: [’Falsch’]Ex 2, Qu 5, Var 1: [’Wahr’]Ex 2, Qu 5, Var 2: [’Wahr’]
Ex 3, Qu 1, Var 1: [’Nein’]Ex 3, Qu 1, Var 2: [’Nein’]Ex 3, Qu 2, Var 1: [’Nein’]Ex 3, Qu 2, Var 2: [’Nein’]Ex 3, Qu 3, Var 1: [’Nein’]Ex 3, Qu 3, Var 2: [’Ja’]Ex 3, Qu 3, Var 3: [’Nein’]Ex 3, Qu 4, Var 1: [’Nein’]Ex 3, Qu 4, Var 2: [’Ja’]Ex 3, Qu 5, Var 1: [’Nein’]Ex 3, Qu 5, Var 2: [’Nein’]
Ex 4, Qu 1, Var 1: [’Nein’]Ex 4, Qu 1, Var 2: [’Nein’]Ex 4, Qu 2, Var 1: [’Nein’]Ex 4, Qu 2, Var 2: [’Ja’]Ex 4, Qu 3, Var 1: [’Nein’]Ex 4, Qu 3, Var 2: [’Nein’]Ex 4, Qu 4, Var 1: [’Ja’]Ex 4, Qu 4, Var 2: [’Ja’]
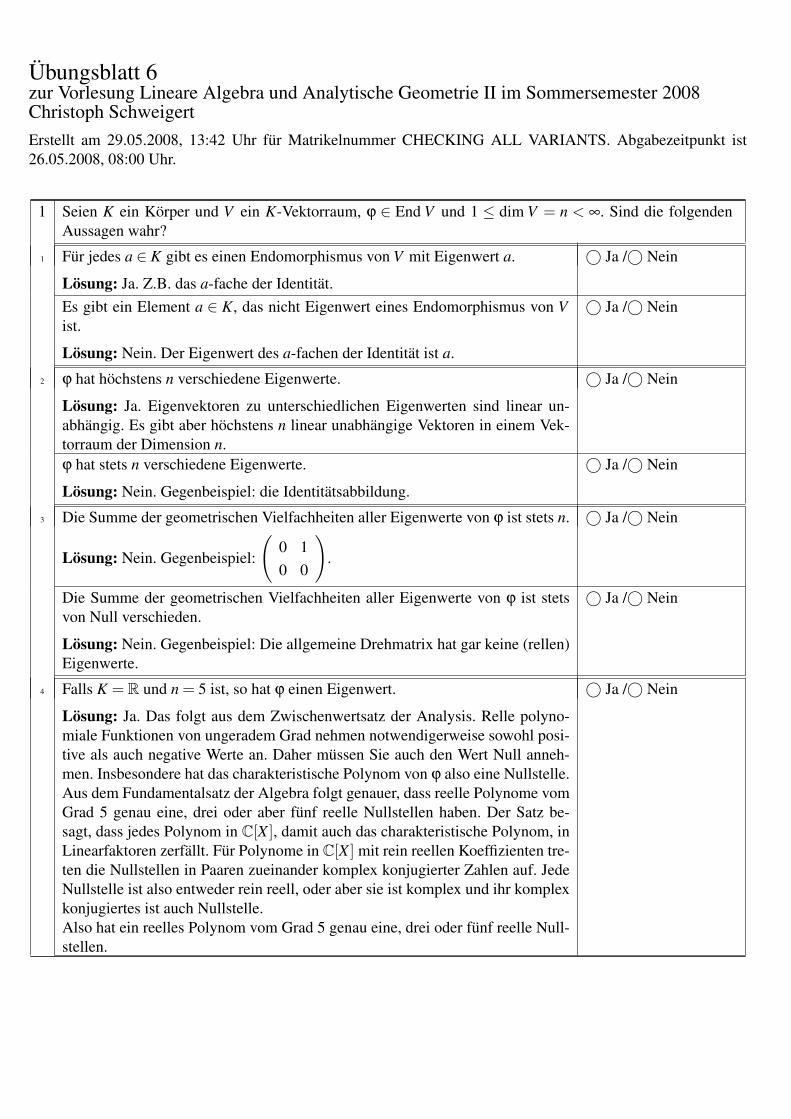
Ubungsblatt 6zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph SchweigertErstellt am 29.05.2008, 13:42 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist26.05.2008, 08:00 Uhr.
1 Seien K ein Korper und V ein K-Vektorraum, ϕ ∈ End V und 1 ≤ dim V = n < ∞. Sind die folgendenAussagen wahr?
1 Fur jedes a ∈ K gibt es einen Endomorphismus von V mit Eigenwert a.
Losung: Ja. Z.B. das a-fache der Identitat.
© Ja /© Nein
Es gibt ein Element a ∈ K, das nicht Eigenwert eines Endomorphismus von Vist.
Losung: Nein. Der Eigenwert des a-fachen der Identitat ist a.
© Ja /© Nein
2 ϕ hat hochstens n verschiedene Eigenwerte.
Losung: Ja. Eigenvektoren zu unterschiedlichen Eigenwerten sind linear un-abhangig. Es gibt aber hochstens n linear unabhangige Vektoren in einem Vek-torraum der Dimension n.
© Ja /© Nein
ϕ hat stets n verschiedene Eigenwerte.
Losung: Nein. Gegenbeispiel: die Identitatsabbildung.
© Ja /© Nein
3 Die Summe der geometrischen Vielfachheiten aller Eigenwerte von ϕ ist stets n.
Losung: Nein. Gegenbeispiel:
(0 10 0
).
© Ja /© Nein
Die Summe der geometrischen Vielfachheiten aller Eigenwerte von ϕ ist stetsvon Null verschieden.
Losung: Nein. Gegenbeispiel: Die allgemeine Drehmatrix hat gar keine (rellen)Eigenwerte.
© Ja /© Nein
4 Falls K = R und n = 5 ist, so hat ϕ einen Eigenwert.
Losung: Ja. Das folgt aus dem Zwischenwertsatz der Analysis. Relle polyno-miale Funktionen von ungeradem Grad nehmen notwendigerweise sowohl posi-tive als auch negative Werte an. Daher mussen Sie auch den Wert Null anneh-men. Insbesondere hat das charakteristische Polynom von ϕ also eine Nullstelle.Aus dem Fundamentalsatz der Algebra folgt genauer, dass reelle Polynome vomGrad 5 genau eine, drei oder aber funf reelle Nullstellen haben. Der Satz be-sagt, dass jedes Polynom in C[X ], damit auch das charakteristische Polynom, inLinearfaktoren zerfallt. Fur Polynome in C[X ] mit rein reellen Koeffizienten tre-ten die Nullstellen in Paaren zueinander komplex konjugierter Zahlen auf. JedeNullstelle ist also entweder rein reell, oder aber sie ist komplex und ihr komplexkonjugiertes ist auch Nullstelle.Also hat ein reelles Polynom vom Grad 5 genau eine, drei oder funf reelle Null-stellen.
© Ja /© Nein

Falls K = R und n = 6 ist, so hat ϕ stets einen Eigenwert.
Losung: Nein. Gegenbeispiel: Es gibt Matrizen, deren charakteristisches Poly-nom gleich X6 +1 ist (z.B. ai j = 0 außer a56 =−a65 = 1).Allgemeiner folgt aus dem Fundamentalsatz der Algebra, dass reelle Polyno-me vom Grad 6 genau null, zwei, vier oder aber sechs reelle Nullstellen habenkonnen. Der Satz besagt, dass jedes Polynom in C[X ], damit auch das charak-teristische Polynom, in Linearfaktoren zerfallt. Fur Polynome in C[X ] mit reinreellen Koeffizienten treten die Nullstellen in Paaren zueinander komplex kon-jugierter Zahlen auf. Jede Nullstelle ist also entweder rein reell, oder aber sie istkomplex und ihr komplex konjugiertes ist auch Nullstelle.Also hat ein reelles Polynom vom Grad 6 genau null, zwei, vier oder sechs reelleNullstellen.
© Ja /© Nein
5 Sei K = C. Falls mit jedem Eigenwert a von ϕ auch 2a ein Eigenwert von ϕ ist,dann ist ϕ = 0.
Losung:
Nein. Gegenbeispiel: ϕ =
(0 10 0
)hat nur den Eigenwert 0, ist aber nicht die
Nullabbildung.
© Ja /© Nein
2 Sei K ein Integritatsring und K[X ] der zugehorige Polynomring. Kreuzen Sie die richtigen Aussagen an.
1 Seien g,q, f ,r ∈ K[X ], so dass g = q f + r gilt mit grad(r) < grad( f ). Dann gilt
a) grad(q) = grad(g)−grad( f )−grad(r)
b) grad(q) = grad(g)−grad( f )
c) grad(q) = grad(g)−grad( f )+grad(r)
Losung: b). Da K ein Integritatsring ist, addieren sich beim Produkt die Gradevon Polynomen:
(aXn +bXn−1 + · · ·)(cXm +dXm−1 + · · ·) = acXn+m + · · · .
� a /� b /� c
2 Sei K = R und g = q f +r in K[X ] mit g = X5−3X4 +3X−2 und f = X2−X +1,wobei grad(r) < grad( f ) gelten soll. Dann gilt
a) q hat ganzzahlige Koeffizienten.
b) r hat ganzzahlige Koeffizienten.
Losung:a) und b). Da alle Koeffizienten in Z liegen, kann man die gesamte Polynomdi-vision in Z[X ] verstehen. Die Aussage folgt dann aus Satz 4.2.10 der Vorlesung.
� a /� b

3 Sei g = Xn−1, f = X −1 und g = q f . Dann gilt
a) q =n−1∑
k=0Xk.
b) q = Xn−1−Xn−2 +Xn−3∓·· ·+(−1)n.
c) q = Xn−1−Xn−2 +Xn−3 + · · ·+1.
� a /� b /� c
3 Es sei σ die folgende Permutation von 9 Elementen:
(1 2 3 4 5 6 7 8 93 5 9 4 1 2 6 7 8
).
Sei mit (i j) die Transposition bezeichnet, die das i-te mit dem j-ten Element vertauscht und ansonstenalle Elemente auf sich selbst abbildet. In den folgenden Fragen ist jeweils eine Verkettung von solchenTranspositionen angegeben, wobei an einer Stelle die Variable i anstelle einer der Ziffern von 1 bis 9 steht.Tragen Sie in das Antwortfeld die Ziffer ein, die man fur i einsetzen muss, damit die Verknupfung derangegebenen Transpositionen gleich σ ist.
1 (7 i)◦ (6 8)◦ (8 2)◦ (5 8)◦ (9 8)◦ (9 3)◦ (1 3)(6 i)◦ (5 7)◦ (8 7)◦ (1 8)◦ (3 8)◦ (2 5)◦ (9 8)
2 (1 6)◦ (9 6)◦ (7 8)◦ (i 6)◦ (3 9)◦ (2 5)◦ (1 2)(3 9)◦ (1 3)◦ (8 5)◦ (i 8)◦ (6 7)◦ (2 7)◦ (5 7)
4 Es sei K ein Korper und A ∈M(n×n,K).
1 Ist s Eigenwert von A, so ist dimK Eig(A,s) = Rang(s ·En−A).
Losung: Nein. Es ist nach der Dimensionsformel
dimK Eig(A,s) = dimK ker(s ·En−A) = n−Rang(s ·En−A).
© Ja /© Nein
Ist s Eigenwert von A, so ist dimK Eig(A,s) = n−Rang(s ·En−A).
Losung: Ja. Es ist nach der Dimensionsformel
dimK Eig(A,s) = dimK ker(s ·En−A) = n−Rang(s ·En−A).
© Ja /© Nein
2 Ist K = C, dann gilt: Wenn das charakteristische Polynom PA 6= Xn ist, so istAm 6= 0 fur alle m ∈ N.
Losung: Ja.In diesem Fall gibt es einen Eigenwert ungleich Null. Keine Potenz von A anni-hiliert den zugehorigen Eigenvektor, daher mussen alle Am von Null verschiedensein.
© Ja /© Nein
Ist K = C, dann gilt: Wenn Am = 0 ist fur ein m ∈ N, so ist das charakteristischePolynom PA = Xn.
Losung: Ja.In diesem Fall kann nur λ = 0 als Eigenwert auftreten, also ist PA eine Potenzvon X .
© Ja /© Nein
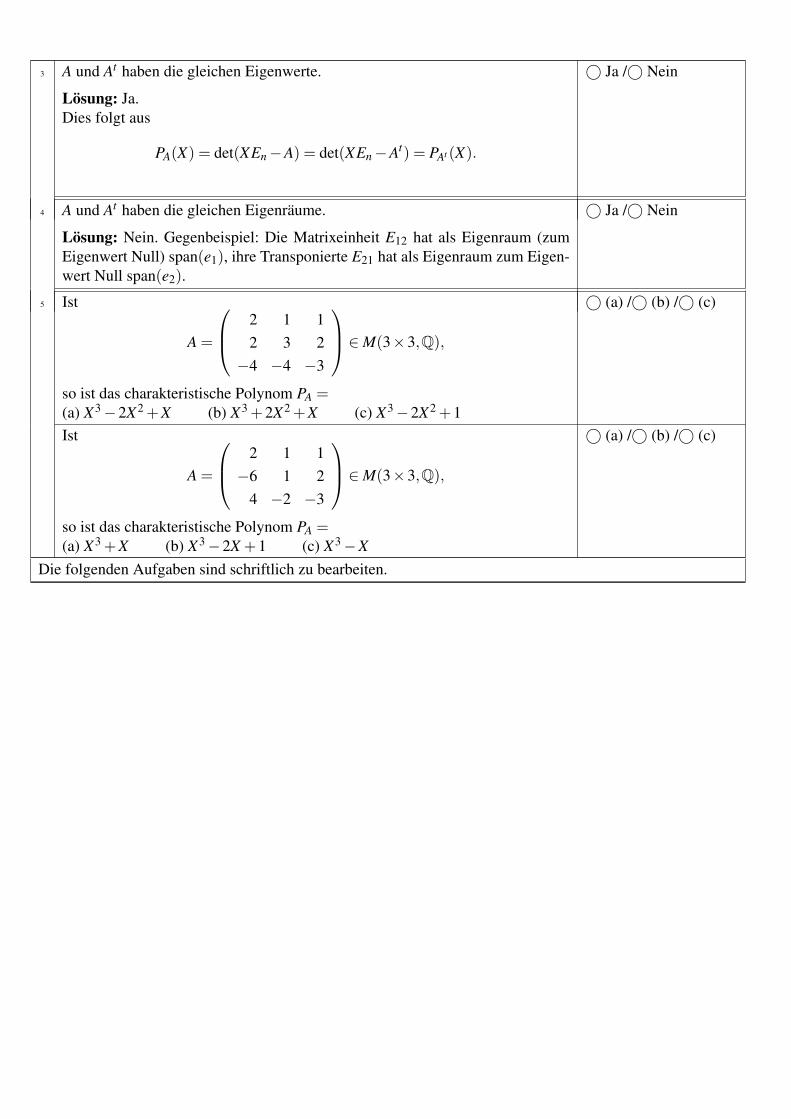
3 A und At haben die gleichen Eigenwerte.
Losung: Ja.Dies folgt aus
PA(X) = det(XEn−A) = det(XEn−At) = PAt (X).
© Ja /© Nein
4 A und At haben die gleichen Eigenraume.
Losung: Nein. Gegenbeispiel: Die Matrixeinheit E12 hat als Eigenraum (zumEigenwert Null) span(e1), ihre Transponierte E21 hat als Eigenraum zum Eigen-wert Null span(e2).
© Ja /© Nein
5 Ist
A =
2 1 12 3 2
−4 −4 −3
∈M(3×3,Q),
so ist das charakteristische Polynom PA =(a) X3−2X2 +X (b) X3 +2X2 +X (c) X3−2X2 +1
© (a) /© (b) /© (c)
Ist
A =
2 1 1−6 1 2
4 −2 −3
∈M(3×3,Q),
so ist das charakteristische Polynom PA =(a) X3 +X (b) X3−2X +1 (c) X3−X
© (a) /© (b) /© (c)
Die folgenden Aufgaben sind schriftlich zu bearbeiten.

5 Wir untersuchen den Ring M(2×2,F2) von 2×2-Matrizen mit Eintragen im Korper F2
(a) (5 Punkte) Geben Sie alle invertierbaren Matrizen an.
(b) (5 Punkte) Ist die Gruppe GL(2,F2) isomorph zu einer symmetrischen Gruppe Sn?
(c) (5 Punkte) Geben Sie die Ahnlichkeitsklassen invertierbarer Matrizen an.
(d) (5 Punkte) Geben Sie die Ahnlichkeitsklassen nicht-invertierbarer Matrizen an.
Losung:Mit Hilfe der Determinante sieht man leicht, dass GL(2,F2) aus den folgenden sechs Elementen besteht:(
1 00 1
)(0 11 0
)(1 01 1
)(1 10 1
)
die außer dem ersten Element Ordnung zwei haben und zwei Elementen(0 11 1
)(1 11 0
)
der Ordnung drei. Als Gruppe liegt die symmetrische Gruppe S3 vor.Es gibt 3 Ahnlichkeitsklassen invertibler Elemente, eine bestehend aus der Identitat, eine bestehend ausden beiden Elementen der Ordnung 3 und eine bestehend aus den 3 Elementen der Ordnung zwei.Die 10 nicht-invertiblen Matrizen fallen in drei Ahnlichkeitsklassen: eine bestehend aus der Null, einebestehend aus den drei Matrizen (
1 11 1
)(0 10 0
)(0 01 0
)
und eine, die die restlichen sechs Elemente enthalt.6 (10 Punkte) Es sei K ein Korper, n ∈ N und A ∈M(n×n,K) eine Matrix. Mit PA ∈ K[X ] sei das charakte-
ristische Polynom von A bezeichnet. Zeigen Sie:Wenn a ∈ K ist und die Dimension dimK(Eig(A,a)) = m fur ein m ∈ N mit m ≥ 1 ist, dann teilt dasPolynom (X −a)m das charakteristische Polynom PA.
Losung:Wir vervollstandigen die m Eigenvektoren zu einer Basis. In dieser hat A die Form aEm ∗
0 A′
.
Das charakteristische Polynom ist also
PA = PaEm ·PA′ = (X −a)mPA′ .

7 (10 Punkte) Gegeben sei die Matrix
A =
0 1 0 00 0 1 00 0 0 11 2 0 −2
∈M(4×4,Q).
Bestimmen Sie alle Eigenwerte und alle Eigenraume von A.
Losung:Das charakteristische Polynom von A errechnet sich zu (X + 1)3(X −1), also ist +1 Eigenwert der alge-braischen Vielfachheit 1 und −1 Eigenwert der algebraischen Vielfachheit 3.Ein Eigenvektor zum Eigenwert 1 ist (1,1,1,1), also ist Eig(A,1) = spanQ(1,1,1,1). Ein Eigenvektorzum Eigenwert −1 ist (1,−1,1,−1). Weitere linear unabhangige Eigenvektoren gibt es nicht, damit istEig(A,−1) = spanQ(1,−1,1,−1).
8 (5 Punkte) Es sei K ein Korper, n ∈ N und A ∈M(n×n,K).Zeigen Sie: Es existiert ein Polynom 0 6= f ∈ K[X ] mit grad( f )≤ n2, fur das f (A) = 0 ∈M(n×n,K) ist.
Losung: Die Dimension des Vektorraumes M(n×n,K) ist n2. Fur jedes A ∈M(n×n,K) muss daher dieFamilie von Matrizen
(En,A,A2,A3, · · · ,An2)
linear abhangig sein, da sie mehr als n2 Elemente enthalt. D. h. es existieren Elemente ci ∈ K, die nichtalle gleich 0 sind, so dass
c0En + c1A+ c2A2 + · · ·+ cn2An2= 0 .
Daher istc0 + c1X + c2X + · · ·+ cn2Xn2
∈ K[X ]
ein Polynom mit den gesuchten Eigenschaften.

9 (20 Punkte) Sei V ein Vektorraum der endlichen Dimension n≥ 1 und sei φ ∈ End(V ) ein Endomorphis-mus von V . Zeigen Sie, dass die folgenden beiden Bedingungen aquivalent sind.i) φ ist diagonalisierbar.ii) Zu jedem Unterraum W ⊂V gibt es einen Unterraum U ⊂V , so dass V = W ⊕U und φ(U)⊂U .Man nennt einen solchen Untervektorraum U ein unter φ stabiles Komplement von W .
Losung:
• i)⇒ ii)
Sei (v1,v2, . . . ,vn) eine Basis von V bestehend aus Eigenvektoren von φ.
Sei (w1, . . . ,wm) eine Basis von W . Wir konnen diese mit Eigenvektoren von φ zu einer Basis
(w1,w2, . . . ,wm, vi1,vi2, . . . ,vin−m)
von V erganzen. Wir setzenU = span(vi1,vi2, . . . ,vin−m)
und finden V = W ⊕U sowie φ(U)⊂U .
• ii)⇒ i) Beweis durch Induktion nach dimV . Der Fall n = 1 ist klar. Sei also n≥ 2.
Wahle irgendeine Hyperebene H1 in V . (Also einen Untervektorraum der Dimension n− 1). NachAnnahme gibt es einen eindimensionalen Unterraum D1 mit V = H1⊕D1 und φ(D1) ⊂ D1. Alsowird D1 durch einen Eigenvektor v1 von φ aufgespannt,
D1 = span(v1) .
Auf diese Weise fahren wir fort. Angenommen wir haben bereits m Eigenvektoren von φ gefunden.Dann wahlen wir wiederum eine Hyperebene H, und zwar so, dass all diese Vektoren darin enthaltensind. Per Voraussetzung gibt es wieder ein D mit V = H⊕D. Ein beliebiges nichtverschwindendesvm+1 ∈ D ist nun unser (m+1)-ter Eigenvektor.
Auf diese Weise erhalt man schließlich eine Basis von V aus Eigenvektoren von φ. Also ist φ diago-nalisierbar.
Den Abgabeschluß der multiple choice Aufgaben sehen Sie oben auf dem Blatt. Die schriftlichen Aufgabenwerden in der Ubungsgruppe am Montag, dem 26. Mai, abgegeben.
Ex 1, Qu 1, Var 1: [’Ja’]Ex 1, Qu 1, Var 2: [’Nein’]Ex 1, Qu 2, Var 1: [’Ja’]Ex 1, Qu 2, Var 2: [’Nein’]Ex 1, Qu 3, Var 1: [’Nein’]Ex 1, Qu 3, Var 2: [’Nein’]Ex 1, Qu 4, Var 1: [’Ja’]Ex 1, Qu 4, Var 2: [’Nein’]Ex 1, Qu 5, Var 1: [’Nein’]
Ex 2, Qu 1, Var 1: [’b’]Ex 2, Qu 2, Var 1: [’a’, ’b’]Ex 2, Qu 3, Var 1: [’a’]
Ex 3, Qu 1, Var 1: [’8’]Ex 3, Qu 1, Var 2: [’7’]Ex 3, Qu 2, Var 1: [’8’]Ex 3, Qu 2, Var 2: [’1’]
Ex 4, Qu 1, Var 1: [’Nein’]Ex 4, Qu 1, Var 2: [’Ja’]Ex 4, Qu 2, Var 1: [’Ja’]Ex 4, Qu 2, Var 2: [’Ja’]Ex 4, Qu 3, Var 1: [’Ja’]Ex 4, Qu 4, Var 1: [’Nein’]Ex 4, Qu 5, Var 1: [’(a)’]Ex 4, Qu 5, Var 2: [’(c)’]
Ubungsblatt 7zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph SchweigertErstellt am 09.06.2008, 14:25 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist02.06.2008, 08:00 Uhr.
1 Es sei K ein beliebiger Korper und K[X ] der Polynomring uber K in der Unbestimmten X . Sind die fol-genden Aussagen richtig?
1 Zwei verschiedene Polynome in K[X ] vom Grad 1 sind teilerfremd; d.h. es gibtkein Polynom vom Grad großer gleich 1, das die beiden Polynome teilt.
Losung: Nein. Gegenbeispiel: 2X und X haben den gemeinsamen Teiler X .
© Ja /© Nein
Zwei verschiedene normierte Polynome in K[X ] vom Grad 1 sind teilerfremd;d.h. es gibt kein Polynom vom Grad großer gleich 1, das die beiden Polynometeilt.
Losung: Ja. Normierte Polynome vom Grad 1 haben die Form X + a. X + aund X +b konnen hochstens einen gemeinsamen Teiler der Form cX +d haben(c 6= 0). Man pruft leicht, dass dies nur fur d = ac = bc und somit a = b moglichist.
© Ja /© Nein
2 In K[X ] gibt es irreduzible Polynome, d.h. Polynome, die sich nicht als Produktzweier nichtkonstanter Polynome schreiben lassen.
Losung: Ja. Jedes Polyom vom Grad 1 ist irreduzibel.
© Ja /© Nein
3 Wenn ein Polynom f ∈ K[X ] unendlich viele Nullstellen hat, dann ist f dasNullpolynom.
Losung: Ja. Nach Lemma 4.2.11 der Vorlesung tragt jede Nullstelle einen Li-nearfaktor zum Polynom bei. Kein nichttriviales Polynom von endlichem Gradkann also unendlich viele Nullstellen haben.
© Ja /© Nein
Jedes Polynom 0 6= f ∈ K[X ] hat nur endlich viele Nullstellen.
Losung: Ja. Nach Lemma 4.2.11 der Vorlesung tragt jede Nullstelle einen Li-nearfaktor zum Polynom bei. Kein nichttriviales Polynom von endlichem Gradkann also unendlich viele Nullstellen haben.
© Ja /© Nein
4 Jedes nicht-konstante Polynom hat eine Nullstelle in K.
Losung: Nein. Gegenbeispiel: X2 +1 ∈ R[X ].
© Ja /© Nein
5 Zu einer reellen Zahl α betrachten wir die Q-Algebra
Q[α] = { f (α) ∈ R | f ∈Q[X ]}
aller Polynomausdrucke in α. Ist diese Q-Algebra fur α =√
7 eine Polynomal-gebra uber Q in der Unbestimmten α?
Losung: Nein. Wegen α2 = 7 lasst sich 7 ∈ Q[α] auf zweierlei Weise als Po-lynom in α schreiben. Das widerspricht der Definition (4.2.4 in der Vorlesung)von Polynomringen.
© Ja /© Nein
Zu einer reellen Zahl α betrachten wir die Q-Algebra
Q[α] = { f (α) ∈ R | f ∈Q[X ]}
aller Polynomausdrucke in α. Ist diese Q-Algebra fur α = 21/3 eine Polynomal-gebra uber Q in der Unbestimmten α?
Losung: Nein. Wegen α3 = 2 lasst sich 2 ∈ Q[α] auf zweierlei Weise als Po-lynom in α schreiben. Das widerspricht der Definition (4.2.4 in der Vorlesung)von Polynomringen.
© Ja /© Nein
21 Ein Polynom heißt unzerlegbar oder irreduzibel, wenn es nicht als Produkt nicht-konstanter Polynome geschrieben werden kann.
Ist das Minimalpolynom der Matrix
(5 10 5
)∈ M(2×2,R) unzerlegbar?
Losung: Nein. Das charakteristische Polynom ist (X −5)2. Da (X −5) nicht imAnnihilator der Matrix liegt, ist auch das Minimalpolynom gleich (X −5)2, alsoreduzibel.
© Ja /© Nein
Ein Polynom heißt unzerlegbar oder irreduzibel, wenn es nicht als Produkt nicht-konstanter Polynome geschrieben werden kann.
Ist das Minimalpolynom von
(5 −10 5
)∈ M(2×2,R) unzerlegbar?
Losung: Nein. Das charakteristische Polynom ist (X −5)2. Da (X −5) nicht imAnnihilator der Matrix liegt, ist auch das Minimalpolynom gleich (X −5)2, alsoreduzibel.
© Ja /© Nein
2 Gibt es ein λ ∈ R, fur das das Minimalpolynom von
(λ 10 λ
)∈ M(2× 2,R)
unzerlegbar ist?
Losung: Nein. Das charakteristische Polynom ist (X −λ)2. Da (X −λ) nicht imAnnihilator der Matrix liegt ist auch das Minimalpolynom gleich (X −λ)2, alsoreduzibel.
© Ja /© Nein
Gibt es ein λ ∈ C, fur das das Minimalpolynom von
(λ 10 λ
)∈ M(2× 2,C)
unzerlegbar ist?
Losung: Nein. Das charakteristische Polynom ist (X −λ)2. Da (X −λ) nicht imAnnihilator der Matrix liegt ist auch das Minimalpolynom gleich (X −λ)2, alsoreduzibel.
© Ja /© Nein
3 Welche Dimension hat der Eigenraum zum Eigenwert 17,5 der Matrix(17,5 1
0 17,5
)∈ M(2×2,R)?
Welche Dimension hat der Eigenraum zum Eigenwert 17,5 der Matrix(17,5 1
0 17,5
)∈ M(2×2,C)?
Welche Dimension hat der Eigenraum zum Eigenwert 5 ∈ F7 der Matrix(5 10 5
)∈ M(2×2,F7)?
4 Sei A eine quadratische Matrix. Fur einen Eigenwert λ von A der algebraischenVielfachheit r≥ 1 nennt man Ker(A−λidV )r den Hauptraum (oder verallgemei-nerten Eigenraum) zum Eigenwert λ.
Was ist die hochste Dimension eines Hauptraums von
(17,5 1
0 17,5
)∈M(2×
2,C)?Sei A eine quadratische Matrix. Fur einen Eigenwert λ von A der algebraischenVielfachheit r≥ 1 nennt man Ker(A−λidV )r den Hauptraum (oder verallgemei-nerten Eigenraum) zum Eigenwert λ.
Was ist die hochste Dimension eines Hauptraums von
(17,5 1
0 17,5
)∈M(2×
2,R)?
5 Welche Dimension hat der Hauptraum von
(4 −11 6
)∈M(2×2,R) zum Fak-
tor X−5 des Minimalpolynoms (also zum Eigenwert 5) dieser Matrix? Losung:Das charakteristische Polynom ist (X − 5)2, also hat 5 als Eigenwert die alge-braische Vielfachheit 2. Wegen (A− 5E2) 6= 0 ist die Matrix A nicht diagonali-sierbar. Das Minimalpolynom ist also (X − 5)2, also (A− 5E2)2 = 0, somit istder Hauptraum der ganze Raum.
Welche Dimension hat der Hauptraum von
(4 −11 6
)∈M(2×2,C) zum Fak-
tor X −5 des Minimalpolynoms dieser Matrix? Losung:Das charakteristische Polynom ist (X − 5)2, also hat 5 als Eigenwert die alge-braische Vielfachheit 2. Wegen (A− 5E2) 6= 0 ist die Matrix A nicht diagonali-sierbar. Das Minimalpolynom ist also (X − 5)2, also (A− 5E2)2 = 0, somit istder Hauptraum der ganze Raum.
Welche Dimension hat der Hauptraum von
(4 61 6
)∈ M(2×2,F7) zum Fak-
tor X +2 des Minimalpolynoms dieser Matrix? Losung:Das charakteristische Polynom ist (X − 5)2, also hat 5 als Eigenwert die alge-braische Vielfachheit 2. Wegen (A− 5E2) 6= 0 ist die Matrix A nicht diagonali-sierbar. Das Minimalpolynom ist also (X − 5)2, also (A− 5E2)2 = 0, somit istder Hauptraum der ganze Raum.

3 Es sei K = F3 und V ein 4-dimensionaler K-Vektorraum mit Basis B = (b1, . . . ,b4). Sei ϕ ∈ End(V ) derEndomorphismus mit
MBB (ϕ) :=
1 1 2 20 2 0 00 0 2 01 0 1 1
.
Sei M eine Teilmenge von V ; unter dem ϕ-Erzeugnis von M verstehen wir den kleinsten ϕ-invariantenUntervektorraum von V , der M enthalt. Wir bezeichnen es mit ϕ〈M 〉.
Losung:ϕ-invariante Unterraume sind offensichtlich span(b1,b4), span(b1,b2,b4), span(b1,b3,b4) und naturlichV = span(b1,b2,b3,b4) selbst.Es ist span(b1,b4) das ϕ-Erzeugnis sowohl von b1 als auch von b4. Ebenso ist span(b1,b2,b4) das ϕ-Erzeugnis von b2 und span(b1,b3,b4) das von b3.Das charakteristische Polynom von ϕ (uber F3!) ergibt sich zu
(X2−2X +2)(X −2)2 .
Der erste Faktor hat, wie man schnell pruft, keine Nullstellen in F3. Das Minimalpolynom (welches jadie gleichen Nullstellen haben muss wie das charakteristische Polynom) ist also entweder gleich demcharakteristischen Polynom, gleich (X−2), gleich (X−2)2, oder aber gleich (X2−2X +2)(X−2). DurchEinsetzen findet man, dass zwar (X − 2) und (X − 2)2 nicht im Annihilator unserer Matrix liegen, aber(X2−2X +2)(X −2). Daher ist das Minmalpolynom gleich (X2−2X +2)(X −2), also vom Grad 3.An dieser Argumentation andert sich kaum etwas, wenn man die Matrix auf span(b1,b2,b4) einschrankt.
1 Ist spanK(b1) ein ϕ-invarianter Untervektorraum von V ? © Ja /© NeinIst spanK(b2) ein ϕ-invarianter Untervektorraum von V ? © Ja /© Nein
2 Ist spanK(b1,b2,b4) das ϕ-Erzeugnis von b2? © Ja /© NeinIst spanK(b1,b4) der Durchschnitt von ϕ〈b3〉 und ϕ〈b2〉? © Ja /© Nein
3 Welche Dimension hat ϕ〈b1〉?Welche Dimension hat ϕ〈b4〉?Welche Dimension hat ϕ〈b1,b4〉?
4 Welchen Grad hat das Minimalpolynom von ϕ?Welchen Grad hat das Minimalpolynom der Einschrankung von ϕ aufϕ〈b1,b2,b4〉?
5 Welchen Grad hat das Minimalpolynom von ϕ auf ϕ〈b2,b4〉+ ϕ〈b1,b2〉?Welchen Grad hat das Minimalpolynom von ϕ auf ϕ〈b2,b4〉∩ ϕ〈b1,b2〉?
4 Wir betrachten einen n-dimensionalen K-Vektorraum V mit geordneter Basis B zusammen mit einemEndomorphismus ϕ. Bekanntlich gibt eine geordnete Basis B einen K-Vektorraum-Isomorphismus ΦB :Kn →V . Es bezeichne ϕ′ den Endomorphismus von Kn, der durch die Matrix MB
B (ϕ) gegeben ist.Mit µϕ sei das Minimalpolynom von ϕ bezeichnet.

1 Gilt ϕ◦ΦB = ΦB ◦ϕ′ ?
Losung: Es gilt ϕ′ = Φ−1B ◦ϕ◦ΦB , da
M(ϕ′) = MBB (ϕ) = M(Φ−1
B ◦ϕ◦ΦB)
nach Lemma 2.7.1 und da M ein Isomorphismus ist.
© Ja /© Nein
Gilt ϕ = ΦB ◦ϕ′ ◦Φ−1B ?
Losung: Es gilt ϕ′ = Φ−1B ◦ϕ◦ΦB , da
M(ϕ′) = MBB (ϕ) = M(Φ−1
B ◦ϕ◦ΦB)
nach Lemma 2.7.1 und da M ein Isomorphismus ist.
© Ja /© Nein
Gilt ϕ′ = Φ−1B ◦ϕ◦ΦB ?
Losung: Es gilt ϕ′ = Φ−1B ◦ϕ◦ΦB , da
M(ϕ′) = MBB (ϕ) = M(Φ−1
B ◦ϕ◦ΦB)
nach Lemma 2.7.1 und da M ein Isomorphismus ist.
© Ja /© Nein
2 Haben ϕ und ϕ′ dasselbe Minimalpolynom?
Losung: Ja, da ein Endomorphismus und seine darstellende Matrix das gleicheMinimalpolynom haben.
© Ja /© Nein
3 Kann man B immer so wahlen, dass MBB (ϕ) eine obere Dreiecksmatrix ist?
Losung: Nein. Falls es so eine Basis gibt, zerfallt das charakteristische Polynomin Linearfaktoren. Das ist aber im Allgemeinen nicht der Fall.
© Ja /© Nein
Kann man B immer so wahlen, dass MBB (ϕ) eine Diagonalmatrix ist?
Losung: Nein. Falls es so eine Basis gibt, zerfallt das charakteristische Polynomin Linearfaktoren. Das ist aber im Allgemeinen nicht der Fall.
© Ja /© Nein
4 Ist fur jeden Teiler X − λ (vom Grad 1) des Minimalpolynoms µϕ dasKorperelement λ ein Eigenwert von ϕ?
Losung: Ja. Denn dann ist λ auch Nullstelle des charakteristischen Polynoms.
© Ja /© Nein
5 Gibt es zu jedem µ ∈ K und jedem k ∈ {0,1, . . . ,n} ein Beispiel eines K-Vektorraums V mit Endomorphismus ϕ, bei dem der Eigenraum Eig(ϕ,µ) dieDimension k hat?
Losung: Ja. Beispiel: Diagonalmatrix mit k Eintragen µ auf der Diagonalen undn− k Eintragen µ′ 6= µ.
© Ja /© Nein
6 Gibt es fur n = 2 zu jedem µ ∈ K Beispiele fur einen K-Vektorraum V mit En-domorphismus ϕ, bei denen das Minimalpolynom von ϕ die Form (X −µ)2 hatund dim KEig(ϕ,µ) = 1 ist?
Losung: Ja. Beispiel:
(µ 10 µ
).
© Ja /© Nein

7 Gibt es fur n = 2 zu jedem µ ∈ K Beispiele eines K-Vektorraums V mit Endo-morphismus ϕ, bei dem das Minimalpolynom von ϕ die Form (X −µ)2 hat undder Eigenraum Eig(ϕ,µ) die Dimension zwei hat?
Losung: Nein. Fur den gegebenen Fall muss ϕ ein Vielfaches der Identitat sein.
© Ja /© Nein
Die folgenden Aufgaben sind schriftlich zu bearbeiten.5 (10 Punkte) Sei V ein endlich-dimensionaler Vektorraum uber einen Korper K und ϕ ein Endomorphismus
von V .Fur jedes Polynom P ∈ K[X ] ist auch P(ϕ) ein Endomorphismus von V .Sei nun u(X) ein Teiler des Minimalpolynoms µϕ mit 1 ≤ Grad u. Zeigen Sie, dass der Kern von u(ϕ)nicht verschwindet, also Kern u(ϕ) 6= {0}.
Losung:Sei µϕ = uq, mit grad(q) < grad(µ). Ware Kernu(ϕ) = {0}, dann ware u(ϕ) wegen der endlichen Dimen-sion von V ein Automorphismus. Aus
0 = µϕ(ϕ) = u(ϕ)q(ϕ)
folgt dann 0 = q(ϕ), so dass mit q ein Polynom mit kleinerem Grad als µϕ im Annihilator lage. Daswiderspricht der Definition des Minimalpolynoms. Also muss Kernu(ϕ) 6= {0} gelten.
6 (i) (5 Punkte) Beweisen Sie: ist eine Matrix A ∈ M(2×2,R) symmetrisch, d.h. gilt A = At , so hat dascharakteristische Polynom nur reelle Nullstellen.
(ii) (5 Punkte) Sei A ∈ M(2×2,R) antisymmetrisch, das heißt es gelte At =−A. Hat dann das charak-teristische Polynom nur reelle Nullstellen? Beweis oder Gegenbeispiel.
Losung:
(i) Das charakteristische Polynom hat die Form
det
(λ−a −b−b λ−d
)= (λ−a)(λ−d)−b2
= λ2− (a+d)λ+ad−b2 .
Die Nullstellen sind
λ1,2 =a+d
2± 1
2
√(a+d)2−4(ad−b2) =
a+d2
± 12
√(a−d)2 +4b2 ,
also reell.
(ii) Ein Gegenbeispiel: Die Matrix (0 1
−1 0
)ist antisymmetrisch. Ihr charakteristisches Polynom ist PA(X) = X2 +1 und hat keine reellen Null-stellen.
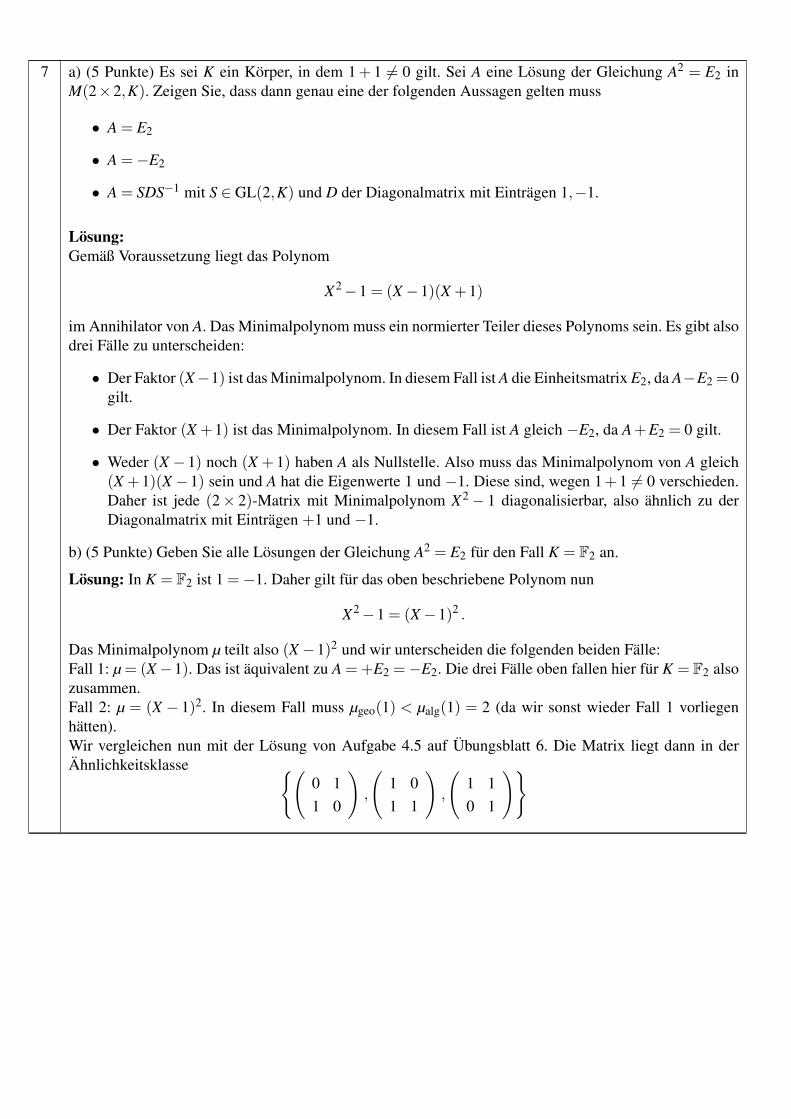
7 a) (5 Punkte) Es sei K ein Korper, in dem 1 + 1 6= 0 gilt. Sei A eine Losung der Gleichung A2 = E2 inM(2×2,K). Zeigen Sie, dass dann genau eine der folgenden Aussagen gelten muss
• A = E2
• A =−E2
• A = SDS−1 mit S ∈ GL(2,K) und D der Diagonalmatrix mit Eintragen 1,−1.
Losung:Gemaß Voraussetzung liegt das Polynom
X2−1 = (X −1)(X +1)
im Annihilator von A. Das Minimalpolynom muss ein normierter Teiler dieses Polynoms sein. Es gibt alsodrei Falle zu unterscheiden:
• Der Faktor (X−1) ist das Minimalpolynom. In diesem Fall ist A die Einheitsmatrix E2, da A−E2 = 0gilt.
• Der Faktor (X +1) ist das Minimalpolynom. In diesem Fall ist A gleich −E2, da A+E2 = 0 gilt.
• Weder (X − 1) noch (X + 1) haben A als Nullstelle. Also muss das Minimalpolynom von A gleich(X +1)(X −1) sein und A hat die Eigenwerte 1 und −1. Diese sind, wegen 1+1 6= 0 verschieden.Daher ist jede (2× 2)-Matrix mit Minimalpolynom X2 − 1 diagonalisierbar, also ahnlich zu derDiagonalmatrix mit Eintragen +1 und −1.
b) (5 Punkte) Geben Sie alle Losungen der Gleichung A2 = E2 fur den Fall K = F2 an.
Losung: In K = F2 ist 1 =−1. Daher gilt fur das oben beschriebene Polynom nun
X2−1 = (X −1)2 .
Das Minimalpolynom µ teilt also (X −1)2 und wir unterscheiden die folgenden beiden Falle:Fall 1: µ = (X −1). Das ist aquivalent zu A = +E2 =−E2. Die drei Falle oben fallen hier fur K = F2 alsozusammen.Fall 2: µ = (X − 1)2. In diesem Fall muss µgeo(1) < µalg(1) = 2 (da wir sonst wieder Fall 1 vorliegenhatten).Wir vergleichen nun mit der Losung von Aufgabe 4.5 auf Ubungsblatt 6. Die Matrix liegt dann in derAhnlichkeitsklasse {(
0 11 0
),
(1 01 1
),
(1 10 1
)}

8 (5 Punkte)Diagonalisieren Sie simultan die beiden Matrizen
A =
12 6 −6−9 −3 6
9 6 −3
B =
5 2 −2−3 0 2
3 2 0
aus M(3×3,R), indem Sie eine Basis von gemeinsamen Eigenvektoren angeben.
Losung:Man rechnet nach, dass die Matrizen A und B kommutieren.Die Matrix A hat die Eigenwerte 3 mit Vielfachheit zwei und 0 mit Vielfachheit eins. Linear unabhangigeEigenvektoren zum Eigenwert 3 sind zum Beispiel
v1 =
203
, v2 =
−230
,
ein Eigenvektor zum Eigenwert 0 ist zum Beispiel
v3 =
1−1
1
.
Da A und B kommutieren, sind die Eigenraume von A unter B invariant. Insbesondere folgt wegendimR Eig(A,0) = 1, dass v3 auch Eigenvektor von B ist.Wir betrachten nun Eig(A,3) und diagonalisieren die Einschrankung von B auf Eig(A,3). Wir sehen, dassB · v1 = 2v1 und B · v2 = 2v2 gilt. Somit hat B|Eig(A,3) bereits Diagonalgestalt und (v1,v2,v3) ist eine Basisvon R3 aus gemeinsamen Eigenvektoren von A und B.
9 Sei K ein Korper und V ein K-Vektorraum mit geordneter Basis (ei)i∈I . Fur i ∈ I definieren wir Elementeϕi ∈V ∗ durch ϕi(e j) = δi j. Zeigen Sie:
(i) (5 Punkte) Die Familie (ϕi)i∈I ist linear unabhangig.
(ii) (5 Punkte) Ist V unendlichdimensional, so ist die Familie (ϕi)i∈I keine Basis von V ∗.
Losung:
(i) Sei J ⊂ I eine endliche Teilmenge und ∑ j∈J λ jϕ j = 0. Fur jedes i ∈ J gilt dann
0 = (∑j∈J
λ jϕ j)(ei) = ∑j∈J
λ jϕ j(ei) = λi
Somit ist jede endliche Teilfamilie von (ei)i∈I linear unabhangig und damit (ei)i∈I linear unabhangig.
(ii) Wir betrachten die Abbildung ϕ ∈V ∗ mit ϕ(ei) = 1 fur alle i ∈ I. Dann ist ϕ keine endliche Linear-kombination der ϕi und somit die Familie (ϕi)i∈I kein Erzeugendensystem.

10 Sei A ∈ M(n×n,C) eine quadratische Matrix. Wir definieren B ∈ 2n×2n,C) durch
B :=
(A A0 A
)
(i) (5 Punkte) Drucken Sie das charakteristische Polynom von B durch das charakteristische Polynomvon A aus und vergleichen Sie die Eigenwerte.
(ii) (5 Punkte) Berechnen Sie Bn fur n ∈ N und damit P(B) fur P ∈ C[X ].
Sei nun B als diagonalisierbar vorausgesetzt.
(iii) (5 Punkte) Zeigen Sie, dass dann A und B das gleiche Minimalpolynom haben.
(iv) (5 Punkte) Zeigen Sie unter Verwendung von (ii) und (iii), dass das Minimalpolynom von A einMonom ist, das heißt µA(X) = X p fur ein gewisses p.
(v) (5 Punkte) Schließen Sie aus der Diagonalisierbarkeit von B, dass A = 0 gilt.
Losung:
(i) Offenbar gilt PB = (PA)2. Insbesondere haben A und B die gleichen Eigenwerte.
(ii) Durch Induktion berechnen wir
Bn =
(An nAn
0 An
)und damit
P(B) =
(P(A) AP′(A)
0 P(A)
)
Wir nehmen nun an, dass B diagonalisierbar ist.
(iii) Wegen (ii) und µB(B) = 0 ist µB(A) = 0, nach der Definition teilt also das Minimalpolynom µA vonA das Minimalpolynom µB von B. Da B diagonalisierbar ist, zerfallt µB in paarweise verschiedeneLinearfaktoren, also auch µA. Nach (i) haben A und B die gleichen Eigenwerte, somit folgt mit derNormiertheit des Minimalpolynoms, dass µA = µB.
(iv) Wegen (ii) und (iii) ist Aµ′A(A) = 0, also gilt µA|Xµ′A. Da beide Polynome den gleichen Grad phaben, folgt pµA(X) = Xµ′A(X). Das einzige normierte Polynom, das diese Bedingung erfullt, istµA(X) = X p.
(v) Mit (iii) und (iv) folgt µB = µA = X p. Da B diagonalisierbar ist, zerfallt µB in paarweise verschiedeneLinearfaktoren, also p = 1. Damit ist µA(X) = X und somit 0 = µA(A) = A.
Den Abgabeschluß der multiple choice Aufgaben sehen Sie oben auf dem Blatt. Die schriftlichen Aufgabenwerden in der Ubungsgruppe am Montag, dem 2. Juni, abgegeben.
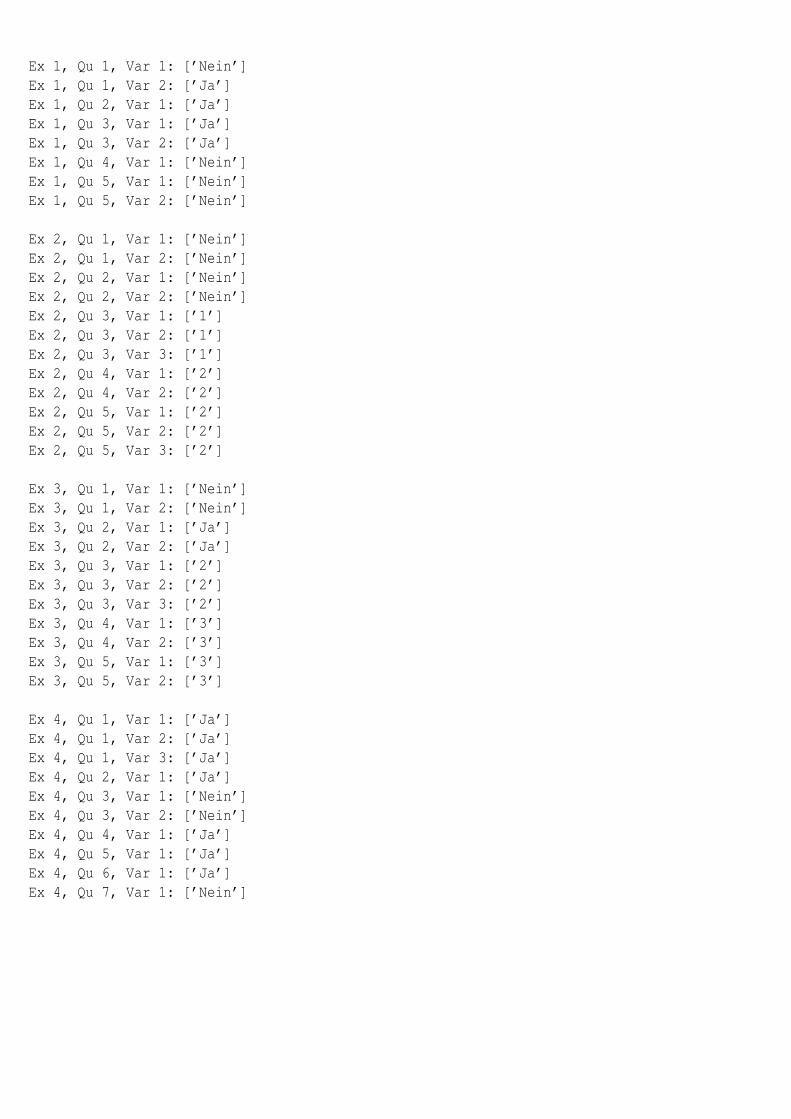
Ex 1, Qu 1, Var 1: [’Nein’]Ex 1, Qu 1, Var 2: [’Ja’]Ex 1, Qu 2, Var 1: [’Ja’]Ex 1, Qu 3, Var 1: [’Ja’]Ex 1, Qu 3, Var 2: [’Ja’]Ex 1, Qu 4, Var 1: [’Nein’]Ex 1, Qu 5, Var 1: [’Nein’]Ex 1, Qu 5, Var 2: [’Nein’]
Ex 2, Qu 1, Var 1: [’Nein’]Ex 2, Qu 1, Var 2: [’Nein’]Ex 2, Qu 2, Var 1: [’Nein’]Ex 2, Qu 2, Var 2: [’Nein’]Ex 2, Qu 3, Var 1: [’1’]Ex 2, Qu 3, Var 2: [’1’]Ex 2, Qu 3, Var 3: [’1’]Ex 2, Qu 4, Var 1: [’2’]Ex 2, Qu 4, Var 2: [’2’]Ex 2, Qu 5, Var 1: [’2’]Ex 2, Qu 5, Var 2: [’2’]Ex 2, Qu 5, Var 3: [’2’]
Ex 3, Qu 1, Var 1: [’Nein’]Ex 3, Qu 1, Var 2: [’Nein’]Ex 3, Qu 2, Var 1: [’Ja’]Ex 3, Qu 2, Var 2: [’Ja’]Ex 3, Qu 3, Var 1: [’2’]Ex 3, Qu 3, Var 2: [’2’]Ex 3, Qu 3, Var 3: [’2’]Ex 3, Qu 4, Var 1: [’3’]Ex 3, Qu 4, Var 2: [’3’]Ex 3, Qu 5, Var 1: [’3’]Ex 3, Qu 5, Var 2: [’3’]
Ex 4, Qu 1, Var 1: [’Ja’]Ex 4, Qu 1, Var 2: [’Ja’]Ex 4, Qu 1, Var 3: [’Ja’]Ex 4, Qu 2, Var 1: [’Ja’]Ex 4, Qu 3, Var 1: [’Nein’]Ex 4, Qu 3, Var 2: [’Nein’]Ex 4, Qu 4, Var 1: [’Ja’]Ex 4, Qu 5, Var 1: [’Ja’]Ex 4, Qu 6, Var 1: [’Ja’]Ex 4, Qu 7, Var 1: [’Nein’]
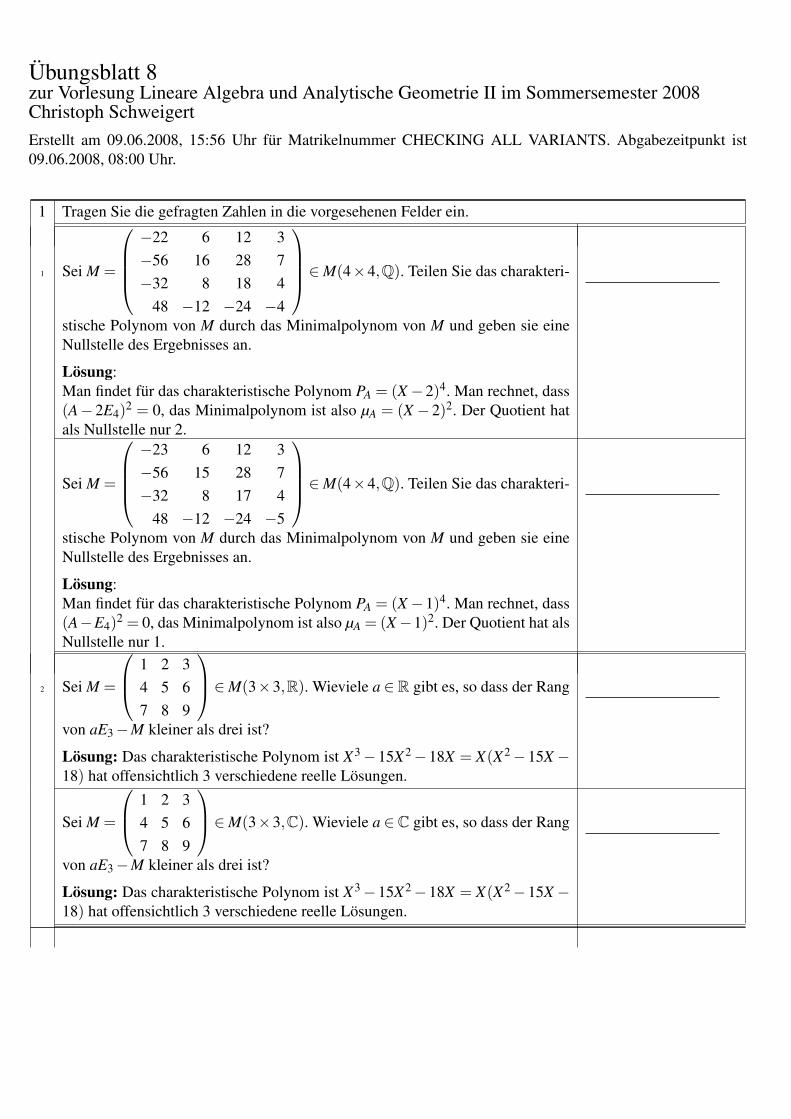
Ubungsblatt 8zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph SchweigertErstellt am 09.06.2008, 15:56 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist09.06.2008, 08:00 Uhr.
1 Tragen Sie die gefragten Zahlen in die vorgesehenen Felder ein.
1 Sei M =
−22 6 12 3−56 16 28 7−32 8 18 4
48 −12 −24 −4
∈M(4×4,Q). Teilen Sie das charakteri-
stische Polynom von M durch das Minimalpolynom von M und geben sie eineNullstelle des Ergebnisses an.
Losung:Man findet fur das charakteristische Polynom PA = (X −2)4. Man rechnet, dass(A− 2E4)2 = 0, das Minimalpolynom ist also µA = (X − 2)2. Der Quotient hatals Nullstelle nur 2.
Sei M =
−23 6 12 3−56 15 28 7−32 8 17 4
48 −12 −24 −5
∈M(4×4,Q). Teilen Sie das charakteri-
stische Polynom von M durch das Minimalpolynom von M und geben sie eineNullstelle des Ergebnisses an.
Losung:Man findet fur das charakteristische Polynom PA = (X −1)4. Man rechnet, dass(A−E4)2 = 0, das Minimalpolynom ist also µA = (X−1)2. Der Quotient hat alsNullstelle nur 1.
2 Sei M =
1 2 34 5 67 8 9
∈M(3×3,R). Wieviele a ∈R gibt es, so dass der Rang
von aE3−M kleiner als drei ist?
Losung: Das charakteristische Polynom ist X3−15X2−18X = X(X2−15X −18) hat offensichtlich 3 verschiedene reelle Losungen.
Sei M =
1 2 34 5 67 8 9
∈M(3×3,C). Wieviele a ∈C gibt es, so dass der Rang
von aE3−M kleiner als drei ist?
Losung: Das charakteristische Polynom ist X3−15X2−18X = X(X2−15X −18) hat offensichtlich 3 verschiedene reelle Losungen.
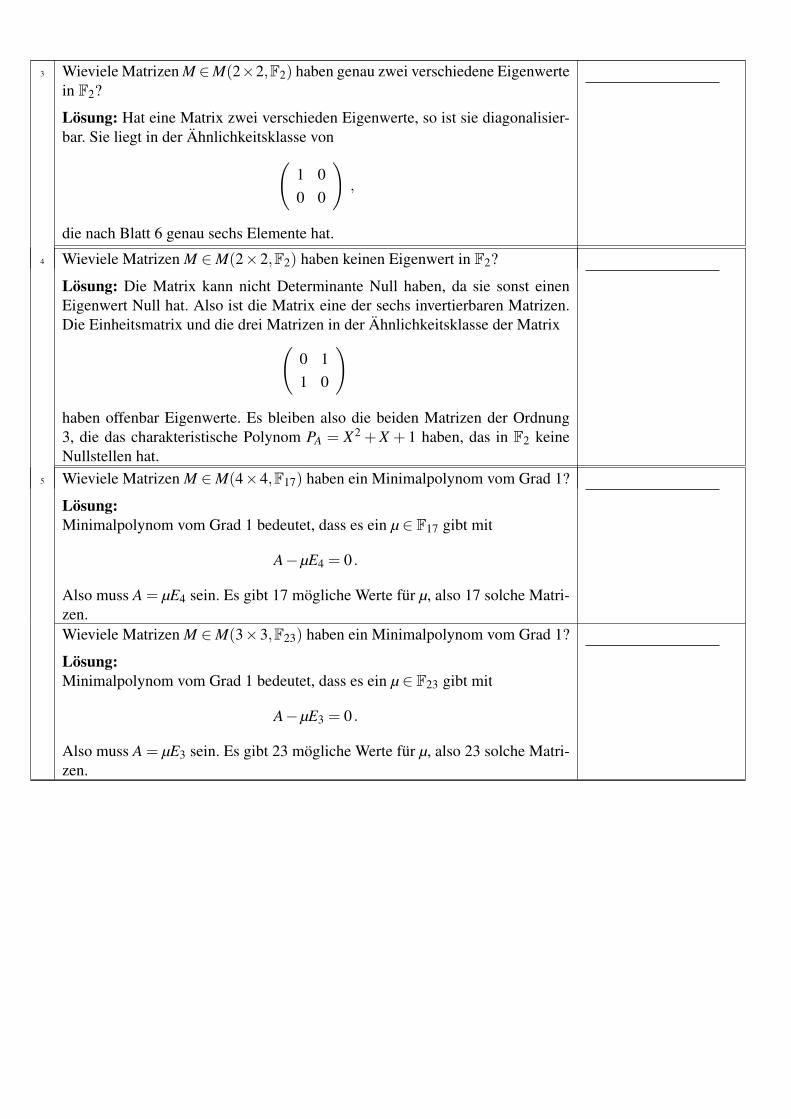
3 Wieviele Matrizen M ∈M(2×2,F2) haben genau zwei verschiedene Eigenwertein F2?
Losung: Hat eine Matrix zwei verschieden Eigenwerte, so ist sie diagonalisier-bar. Sie liegt in der Ahnlichkeitsklasse von(
1 00 0
),
die nach Blatt 6 genau sechs Elemente hat.
4 Wieviele Matrizen M ∈M(2×2,F2) haben keinen Eigenwert in F2?
Losung: Die Matrix kann nicht Determinante Null haben, da sie sonst einenEigenwert Null hat. Also ist die Matrix eine der sechs invertierbaren Matrizen.Die Einheitsmatrix und die drei Matrizen in der Ahnlichkeitsklasse der Matrix(
0 11 0
)
haben offenbar Eigenwerte. Es bleiben also die beiden Matrizen der Ordnung3, die das charakteristische Polynom PA = X2 + X + 1 haben, das in F2 keineNullstellen hat.
5 Wieviele Matrizen M ∈M(4×4,F17) haben ein Minimalpolynom vom Grad 1?
Losung:Minimalpolynom vom Grad 1 bedeutet, dass es ein µ ∈ F17 gibt mit
A−µE4 = 0 .
Also muss A = µE4 sein. Es gibt 17 mogliche Werte fur µ, also 17 solche Matri-zen.Wieviele Matrizen M ∈M(3×3,F23) haben ein Minimalpolynom vom Grad 1?
Losung:Minimalpolynom vom Grad 1 bedeutet, dass es ein µ ∈ F23 gibt mit
A−µE3 = 0 .
Also muss A = µE3 sein. Es gibt 23 mogliche Werte fur µ, also 23 solche Matri-zen.
2 Es sei A = (ai, j) ∈M(n×n,R) mit
ai, j =
{1 wenn i+ j gerade,0 sonst
und µA das Minimalpolynom.
Losung:Fur n ≥ 2 hat A offenbar genau zwei linear unabhangige Zeilenvektoren. Daher ist rangA = 2 unddimkerA = n−2.Fur x ∈Q sei [x] die großte ganze Zahl kleiner gleich x.Der Vektor e1 = (1,0,1, · · ·) ist Eigenvektor von A zum Eigenwert [(n+1)/2].Der Vektor e2 = (0,1,0, · · ·) ist Eigenvektor von A zum Eigenwert [n/2].Also gibt es eine Basis, in der A dargestellt wird durch eine Matrix der Form
M(A) = diag([n/2], [(n+1)/2],0,0, · · ·) .
Fur n gerade ist daher µA = X(X −n/2). Fur n ungerade ist µA = X(X − (n−1)/2)(X − (n+1)/2).Fur n gerade ist der großte Eigenwert gleich n/2. Fur n ungerade ist der großte Eigenwert gleich (n+1)/2.Der kleinste Eigenwert ist immer die Null. Der zugehorige Eigenraum hat die Dimension dimkerA = n−2.
1 Fur n = 70 ist Grad µA gleichFur n = 72 ist Grad µA gleichFur n = 74 ist Grad µA gleich
2 Fur n = 74 ist der großte Eigenwert gleichFur n = 76 ist der großte Eigenwert gleichFur n = 78 ist der großte Eigenwert gleich
3 Fur n = 63 ist der großte Eigenwert gleichFur n = 65 ist der großte Eigenwert gleichFur n = 67 ist der großte Eigenwert gleich
4 Fur n = 133 ist die Dimension des Eigenraums Eig(A, t) zum kleinsten Eigen-wert t gleichFur n = 135 ist die Dimension des Eigenraums Eig(A, t) zum kleinsten Eigen-wert t gleichFur n = 137 ist die Dimension des Eigenraums Eig(A, t) zum kleinsten Eigen-wert t gleich
5 Fur n = 60 ist die Dimension des Eigenraums Eig(A, t) zum großten Eigenwertt gleichFur n = 70 ist die Dimension des Eigenraums Eig(A, t) zum großten Eigenwertt gleichFur n = 80 ist die Dimension des Eigenraums Eig(A, t) zum großten Eigenwertt gleich
3 Wir betrachten einen n-dimensionalen K-Vektorraum mit einem Endomorphismus ϕ. Ist T ⊆ V ein ϕ-invarianter Untervektorraum, dann bezeichnen wir mit ϕT die Einschrankung von ϕ auf T . Mit µϕ sei dasMinimalpolynom von ϕ bezeichnet.
1 Ist fur jeden Eigenwert λ von ϕ das Polynom X−λ ein Teiler des Minimalpoly-noms µϕ?
Losung: Ja. Fur jede Nullstelle α eines Polynoms ist (X − α) immer Teiler.(Lemma 4.2.11 der Vorlesung.)
© Ja /© Nein
Ist jedes unzerlegbare normierte Polynom p(X) mit p(ϕ) = 0 gleich µϕ?
Losung: Ja. Denn es wird durch µϕ geteilt, hat aber keine echten Teiler. Manbeachte aber, dass ein Minimalpolynom nicht unbedingt unzerlegbar sein muss!
© Ja /© Nein
2 Ist jedes Polynom q(X) mit q(ϕ) = 0 ein Teiler von µϕ?
Losung: Nein. Gegenbeispiel: q = µ2ϕ.
© Ja /© Nein
Ist jedes Polynom r(X) mit r(ϕ) = 0 ein Vielfaches von µϕ?
Losung: Ja. Das folgt aus der Definition von µϕ.
© Ja /© Nein
3 µ1, µ2 seien die Minimalpolynome der Restriktionen von ϕ auf die ϕ-invariantenUntervektorraume T1 bzw. T2. Ist µ1·µ2 dann das Minimalpolynom der Restrik-tion von ϕ auf T1 +T2?
Losung: Nein. Gegenbeispiel: ϕ = E2, T1 = span(e1), T2 = span(e2).
© Ja /© Nein
4 µ1, µ2 seien die Minimalpolynome der Restriktionen von ϕ auf die ϕ-invariantenUntervektorraume T1 bzw. T2, deren Schnitt trivial sei. Ist µ1·µ2 dann das Mini-malpolynom der Restriktion von ϕ auf T1⊕T2?
Losung: Nein. Gegenbeispiel: ϕ = E2, T1 = span(e1), T2 = span(e2).
© Ja /© Nein
5 µ1 und µ2 seien die Minimalpolynome der Restriktionen von ϕ auf die ϕ-invarianten Untervektorraume T1 bzw. T2, und g sei der großte gemeinsame Tei-ler mit hochstem Koeffizienten 1 von µ1 und µ2. Ist g dann das Minimalpolynomvon ϕ|T1∩T2?
Losung: Nein. Gegenbeispiel: Sei a 6= b, und A die Diagonalmatrix mit Ein-tragen a,b,a. Setze T1 := spanK(e1,e2) und T2 := spanK(e2,e3). Dann ist
µ1 = µ2 = (X −a)(X −b) = g
aber das Minimalpolynom des Schnitts ist X −b.
© Ja /© Nein
4 Es sei K ein Korper, ϕ ∈ End V fur einen n-dimensionalen K-Vektorraum V und A ∈ M(n× n,K) mitn≥ 1. Das charakteristische Polynom von ϕ bzw. A wird mit Pϕ bzw. PA bezeichnet, das Minimalpolynommit µϕ bzw. µA.
1 Ist ϕ bijektiv, so ist Pϕ(0) 6= 0.
Losung: Ja. Es ist Pϕ(0) = (−1)n det(ϕ). Ist ϕ bijektiv, so ist die Determinantevon Null verschieden.
© Ja /© Nein
Ist Pϕ(0) 6= 0, so ist ϕ bijektiv.
Losung: Ja. Es ist Pϕ(0) = (−1)n det(ϕ). Ist det(ϕ) 6= 0, so ist ϕ bijektiv.
© Ja /© Nein
2 Ist Pϕ = PA, so gibt es eine geordnete Basis B in V mit A = MB(ϕ).
Losung: Nein. Gegenbeispiel: ϕ =
(0 10 0
)und A = 02.
© Ja /© Nein
3 Jedes normierte Polynom vom Grad n uber K ist charakteristisches Polynomeines Endomorphismus von V .
Losung: Ja. Man konstruiert diesen Endomorphismus wie im Beweis von Theo-rem 4.5.7 (Cayley-Hamilton) in der Vorlesung.
© Ja /© Nein
4 Jedes normierte Polynom vom Grad n uber K ist Minimalpolynom eines Endo-morphismus von V .
Losung: Ja. Zunachst konstruiert man einen Endomorphismus mit dem gege-benen Polynom als charakteristischem Polynom, wie im Beweis von Theorem4.5.7 (Cayley-Hamilton) in der Vorlesung.Aus dem Beweis geht außerdem hervor, dass fur den so konstruierten Endomor-phismus charakteristisches Polynom PA und Minimalpolynom µA ubereinstim-men. Denn ware
µA =m
∑i=0
aiX i
ein echter Teiler von PA, so ware der Grad m strikt kleiner als der Grad von PA.Es folgt dann aber aus
0 = µA(A)v =m
∑i=0
aiAiv =m
∑i=0
aivi ,
dass die im Beweis angenommene lineare Abhangigkeitsbeziehung nicht mini-mal ware, Widerspruch.
© Ja /© Nein
5 Hat Pϕ n paarweise verschiedene Nullstellen in K, so ist Pϕ = µϕ.
Losung: Ja. Denn das Minimalpolynom teilt das charakteristische Polynom undhat die gleichen Nullstellen.
© Ja /© Nein
6 Ist Pϕ = µϕ, so hat der Endomorphismus ϕ mindestens einen Eigenwert.
Losung: Nein. Gegenbeispiel: Drehmatrix im R2.
© Ja /© Nein
7 Ist die Summe der Koeffizienten des charakteristischen Polynoms Pϕ gleich 0,so ist 1 Eigenwert von ϕ.
Losung: Ja. Denn dann ist Pϕ(1) = 0.
© Ja /© Nein
8 Ist die Summe der Koeffizienten des Minimalpolynoms µϕ gleich 0, so ist 1Eigenwert von ϕ.
Losung: Ja. Denn dann ist µϕ(1) = 0.
© Ja /© Nein
9 Sei
A =
1 0 . . . 00 2 . . . 0. . . . . . . . . . . .
0 0 . . . n
∈M(n×n,R)
und B ∈ M(n× n,R) diagonalisierbar. Es gelte AB = BA; ist dann B notwendi-gerweise eine Diagonalmatrix?BemerekungDie Forderung, dass B diagonalisierbar ist, ist nicht notwendig.
© Ja /© Nein
Die folgenden Aufgaben sind schriftlich zu bearbeiten.
5 (5 Punkte) Sei K ein beliebiger Korper und ϕ ein Endomorphismus eines K-Vektorraums V . Zeigen Sie:Ist jeder Vektor v ∈V \{0} ein Eigenvektor, so gibt es ein a ∈ K, so dass ϕ = aidV gilt.
Losung:Seien v1 6= 0 und v2 6= 0 Eigenvektoren zu den Eigenwerten λ1 und λ2. Sind λ1 und λ2 verschieden, soist (v1,v2) linear unabhangig. Wir betrachten die Summe v1 + v2. Nach Annahme ist auch dies wieder einEigenvektor, es gibt also a ∈ K so dass
λ1v1 +λ2v2 = ϕ(v1 + v2) = av1 +av2
gilt. Aus der linearen Unabhangigkeit von v1,v2 folgt λ1 = λ2 = a.6 Sei V ein endlich-dimensionaler K-Vektorraum. Sei M eine nicht-leere Teilmenge von End(V ) mit der
Eigenschaft, dass V und {0} die einzigen Unterraume von V sind, die unter allen ϕ ∈M invariant sind.Sei ψ 6= 0 ein Endomorphismus von V , der mit allen ϕ ∈M vertauscht.Zeigen Sie:(i) (5 Punkte) ψ ist ein Automorphismus.(ii) (5 Punkte) Im Falle K = C hat ψ sogar die Gestalt ψ = aidV mit einem a ∈ C\{0}.
Losung:i) Wir nehmen an, dass dimK kerψ > 0 und fuhren dies zu einem Widerspruch.Wahle also ein v ∈ kerψ und ein ϕ ∈M, so dass ϕ(v) 6∈ ker ψ. Die Existenz eines solchen ϕ folgt aus derAnnahme, denn sonst ware der echte Unterraum kerψ invariant unter allen ϕ ∈M.Offensichtlich ist dann ϕ(ψ(v)) = 0 und ψ(ϕ(v)) 6= 0. Das widerspricht der Annahme, dass ψ und ϕ
vertauschen.Also muss dimK kerψ = 0 gelten. Es folgt damit, dass V endlich-dimensional ist, dass ψ ein invertierbarerEndomorphismus (= Automorphismus) ist.ii) Da K = C, hat ψ wenigstens einen Eigenwert a. Betrachte den Endomorphismus ψ := ψ− aidV , derebenso mit allen ϕ ∈ M vertauscht. Ware dieser Endomorphismus nicht Null, so ware er nach (i) einAutomorphismus. Das kann aber nicht sein, da es einen Eigenvektor von ψ zum Eigenwert a gibt, der imKern von ψ liegt, so dass ψ kein Automorphismus ist. Also ist ψ = 0.
7 (10 Punkte)Sei K ein Korper und V ein K-Vektorraum der Dimension n. Seien f1, . . . , fm ∈ V ∗ Linearformen und seiU = ker f1∩ . . .∩ker fm. Zeigen Sie, dass dimK U ≥ n−m gilt.
Losung:Wir konnen ohne Einschrankung annehmen, dass alle fi von Null verschieden sind.Die Raume ker fi haben nach der Dimensionsformel die Dimension n− 1, sind also Hyperebenen. Seiallgemein H eine Hyperebene und W ein Untervektorraum von V . Nach Satz 1.5.3 gilt dann dimK(W ∩H)≥ dimK W −1. Per Induktion nach m folgt dann leicht die Aussage.

8 Ein Endomorphismus ϕ eines n-dimensionalen K-Vektorraums V heißt nilpotent, wenn es eine naturlicheZahl k gibt, so dass ϕk = 0 gilt.(i) (15 Punkte) Beweisen Sie die Aquivalenz der folgenden Aussagen uber einen Endomorphismus einesn-dimensionalen K-Vektorraums:
1. ϕ ist nilpotent.
2. Das charakteristische Polynom ist Pϕ(X) = Xn.
3. Es gibt eine Basis von V , bezuglich welcher ϕ durch eine obere Dreiecksmatrix mit lauter Nullenauf der Hauptdiagonalen dargestellt wird.
4. Es gilt ϕn = 0.
Hinweis:Verwenden Sie die Kette von Inklusionen
kerϕ⊂ kerϕ2 ⊂ kerϕ
3 ⊂ ·· · ⊂ kerϕk = V ,
um 1.) ⇒ 3.) zu zeigen.(ii) Zeigen Sie, dass fur eine nilpotente Matrix A ∈M(n×n,K) gilt:
1. (5 Punkte) Sp(A) = 0.
2. (5 Punkte) det(A+En) = det(En−A) = 1.
(iii) (10 Punkte) Sei A nilpotent. Zeigen Sie: Fur jede Matrix B ∈ M(n× n,K), die mit A vertauscht, giltdet(A+B) = det(B).

9 (Losung der vorigen Aufgabe)Losung von (i):Wir zeigen zuerst 1)⇒ 3). Die anderen Aussagen folgen dann leicht.Sei also ϕ nilpotent. Es folgt offensichtlich die Kette
kerϕ⊂ kerϕ2 ⊂ kerϕ
3 ⊂ ·· · ⊂ kerϕk = V ,
von strikten Inklusionen, wobei wir annehmen konnen, dass k die kleinste naturliche Zahl ist, fur die ϕk = 0gilt.Wir wahlen nun eine Basis (e1
1,e12, · · ·) von kerϕ. Diese erganzen wir zu einer Basis (e1
1,e12, · · · ,e2
1,e22, · · ·)
von kerϕ2. Das Ergebnis erganzen wir wiederum zu einer Basis (e11,e
12, · · · ,e2
1,e22, · · · ,e3
1,e32, · · ·) von kerϕ3.
Wenn wir auf diese Weise fortfahren, erhalten wir eine Basis von V , in der ϕ durch eine Matrix dargestelltwir, die nichtverschwindende Eintrage nur oberhalb der Hauptdiagonalen hat. Denn
ϕ(emi ) ∈ kerϕ
m−1 = span(e11,e
12, · · · ,e2
1,e22, · · · ,em−1
1 ,em−12 , · · · ,em−1
p ) .
Die Implikationen 3) ⇒ 1) und 3) ⇒ 4) folgen leicht aus den Regeln der Matrixmultiplikation. 3) ⇒2) folgt aus der Tatsache, dass die Determinante einer oberen Dreiecksmatrix gleich dem Produkt derDiagonalelemente ist. 4)⇒ 1) ist trivial.Schließlich gilt 2)⇒ 1), denn das charakteristische Polynomom ist nach Cayley-Hamilton im Annihilatorvon ϕ. Damit folgen die verbleibenden Implikationen.
Losung: von (ii)
1. Folgt direkt aus Aussage 2) in Teil (i), da die Spur von A der Koeffizient von Xn−1 ist, oder ausAussage 3) in Teil (i), da die Spur unabhangig von der Wahl einer Basis ist.
2. In der Basis, in der A eine obere Dreiecksmatrix mit lauter Nullen auf der Diagonale ist – eine solcheBasis existiert nach Aussage 3 von Teil (i) – folgt die Aussage sofort.
Losung: von (iii)Ist B invertibel, so folgt aus [A,B] = AB−BA = 0 sofort (AB−1)k = AkB−k. Ist also A nilpotent, so folgt,dass auch AB−1 nilpotent ist. Somit folgt
det(A+B) = det(AB−1 +En)B = det(AB−1 +En) ·detB = detB ,
wobei wir im letzten Teil (ii) verwendet haben.Ist B nicht invertibel, so ist detB = 0 und Ker(B) ein nicht-trivialer A-invarianter Unterraum. Auch dieRestriktion von A auf diesen Unterraum ist nilpotent, also trigonalisierbar. Es gibt also einen Eigenvektorvon A im Kern von B, d.h. v∈V mit Av = 0 = Bv. Daraus folgt (A+B)v = 0, also det(A+B) = 0 = det(B).
Den Abgabeschluß der multiple choice Aufgaben sehen Sie oben auf dem Blatt. Die schriftlichen Aufgabenwerden in der Ubungsgruppe am Montag, dem 9. Juni, abgegeben.
Ex 1, Qu 1, Var 1: [’2’]Ex 1, Qu 1, Var 2: [’1’]Ex 1, Qu 2, Var 1: [’3’]Ex 1, Qu 2, Var 2: [’3’]Ex 1, Qu 3, Var 1: [’6’]Ex 1, Qu 4, Var 1: [’2’]Ex 1, Qu 5, Var 1: [’17’]Ex 1, Qu 5, Var 2: [’23’]
Ex 2, Qu 1, Var 1: [’2’]Ex 2, Qu 1, Var 2: [’2’]Ex 2, Qu 1, Var 3: [’2’]Ex 2, Qu 2, Var 1: [’37’]Ex 2, Qu 2, Var 2: [’38’]Ex 2, Qu 2, Var 3: [’39’]Ex 2, Qu 3, Var 1: [’32’]Ex 2, Qu 3, Var 2: [’33’]Ex 2, Qu 3, Var 3: [’34’]Ex 2, Qu 4, Var 1: [’131’]Ex 2, Qu 4, Var 2: [’133’]Ex 2, Qu 4, Var 3: [’135’]Ex 2, Qu 5, Var 1: [’2’]Ex 2, Qu 5, Var 2: [’2’]Ex 2, Qu 5, Var 3: [’2’]
Ex 3, Qu 1, Var 1: [’Ja’]Ex 3, Qu 1, Var 2: [’Ja’]Ex 3, Qu 2, Var 1: [’Nein’]Ex 3, Qu 2, Var 2: [’Ja’]Ex 3, Qu 3, Var 1: [’Nein’]Ex 3, Qu 4, Var 1: [’Nein’]Ex 3, Qu 5, Var 1: [’Nein’]
Ex 4, Qu 1, Var 1: [’Ja’]Ex 4, Qu 1, Var 2: [’Ja’]Ex 4, Qu 2, Var 1: [’Nein’]Ex 4, Qu 3, Var 1: [’Ja’]Ex 4, Qu 4, Var 1: [’Ja’]Ex 4, Qu 5, Var 1: [’Ja’]Ex 4, Qu 6, Var 1: [’Nein’]Ex 4, Qu 7, Var 1: [’Ja’]Ex 4, Qu 8, Var 1: [’Ja’]Ex 4, Qu 9, Var 1: [’Ja’]
Ubungsblatt 9zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph SchweigertErstellt am 17.06.2008, 17:39 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist16.06.2008, 08:00 Uhr.
1 Seien V und W endlichdimensionale K-Vektorraume und F : V →W eine lineare Abbildung mit zugehori-ger dualer Abbildung F∗ : W ∗→V ∗. Entscheiden Sie, ob die folgenden Aussagen wahr oder falsch sind.
1.1 Mit F ist auch stets F∗ injektiv.
Losung: Falsch.
F : K → K3 mit F(λ) = λe1 ist injektiv. F∗ ist eine Abbildung von einem drei-dimensionalen in einen ein-dimensionalen Vektorraum und kann wegen der Di-mensionsformel nicht injektiv sein.
© Wahr /© Falsch
Mit F ist auch stets F∗ surjektiv.
Losung: Falsch.
F : K3 → K mit F(∑xiei) = x1 ist surjektiv. F∗ ist eine Abbildung von einemein-dimensionalen in einen drei-dimensionalen Vektorraum und kann wegen derDimensionsformel nicht surjektiv sein.
© Wahr /© Falsch
1.2 F∗ ist genau dann surjektiv, wenn F injektiv ist.
Losung: Wahr.
F∗ ist genau dann injektiv, wenn (ImF)0 = KerF∗ = {0} gilt. Dies ist aber genaudann der Fall, wenn ImF = W gilt.
© Wahr /© Falsch
F∗ ist genau dann injektiv, wenn F surjektiv ist.
Losung: Wahr.
F∗ ist genau dann surjektiv, wenn (KerF)0 = ImF∗ =V ∗ gilt. Dies ist aber genaudann der Fall, wenn KerF = {0} gilt.
© Wahr /© Falsch
1.3 Gelte dimK V = dimK W . F∗ ist genau dann injektiv, wenn F injektiv ist.
Losung: Wahr.
Aus F∗ injektiv folgt, wegen dimK V = dimK W , dass F∗ auch surjektiv ist. Nachder vorigen Aufgabe ist daher F injektiv.
© Wahr /© Falsch
Gelte dimK V = dimK W . F∗ ist genau dann surjektiv, wenn F surjektiv ist.
Losung: Wahr.
Aus F∗ surjektiv folgt, wegen dimK V = dimK W , dass F∗ auch injektiv ist. Nachder vorigen Aufgabe ist daher F surjektiv.
© Wahr /© Falsch

1.4 F∗ ist genau dann invertierbar, wenn F invertierbar ist.
Losung: Wahr.
Das folgt aus der vorigen Aufgabe. Expliziter: Sei F−1 das Inverse zu F , dannfolgt mit Lemma 5.1.11 aus der Vorlesung, dass (F∗)−1 = (F−1)∗ gilt, denn
(F−1)∗ ◦F∗ = (F ◦F−1)∗ = (IdW )∗ = IdW ∗
F∗ ◦ (F−1)∗ = (F−1 ◦F)∗ = (IdV )∗ = IdV ∗ .
© Wahr /© Falsch
Sei nun V = W , also F und F∗ Endomorphismen.
1.5 F∗ ist genau dann trigonalisierbar, wenn F trigonalisierbar ist.
Losung: Wahr.
Folgt aus Satz 5.1.12 der Vorlesung: In dualen Basen sind die darstellenden Ma-trizen von F und F∗ zueinander transponiert.
© Wahr /© Falsch
F∗ ist genau dann diagonalisierbar, wenn F diagonalisierbar ist.
Losung: Wahr.
Folgt aus Satz 5.1.12 der Vorlesung: In dualen Basen sind die darstellenden Ma-trizen von F und F∗ zueinander transponiert.
© Wahr /© Falsch
1.6 F und F∗ haben stets das gleiche charakteristische Polynom.
Losung: Wahr.
Folgt aus Satz 5.1.12 der Vorlesung: In dualen Basen sind die darstellenden Ma-trizen von F und F∗ zueinander transponiert. Das charakteristische Polynomgewinnt man aus der Determinante der darstellenden Matrix. Deren Wert andertsich nach Satz 3.2.10 der Vorlesung nicht unter Transposition.
© Wahr /© Falsch
1.7 F und F∗ haben stets das gleiche Minimalpolynom.
Losung: Wahr.
Der Annulator von F ist gleich dem von F∗, denn mit P(A) = 0 folgt auch 0 =(P(A))t = P(At).
© Wahr /© Falsch
1.8 F sei nilpotent. Ist dann auch F∗ nilpotent?
Losung: Wahr.
Das folgt aus Lemma 5.1.11 der Vorlesung, wonach (F∗)n = (Fn)∗.
© Wahr /© Falsch
F∗ sei nilpotent. Ist dann auch F nilpotent?
Losung: Wahr.
Das folgt aus Lemma 5.1.11 der Vorlesung, wonach (F∗)n = (Fn)∗.
© Wahr /© Falsch

1.9 Sei V unendlichdimensional. Dann ist die kanonische Abbildung
ιV : V →V ∗∗
injektiv, aber nicht surjektiv
© Wahr /© Falsch
2 Bezeichne V = R2[X ] den reellen Vektorraum der rellen Polynome vom Grad ≤ 2, und sei V ∗ der zu-gehorige Dualraum. Wir betrachten die Basen
A = (ai)i=1...3 =(1 ,X ,X2)
undB = (bi)i=1...3 =
((X −1)0 ,(X −1)1 ,(X −1)2)
von V . Ferner betrachten wir Basen C ∗ = (c∗1,c∗2,c
∗3) und D∗ = (d∗1 ,d∗2 ,d∗3) von V ∗ mit
c∗n : R2[X ] → Rf 7→ f (n) .
und
d∗n : R2[X ] → R
f 7→Z 1
0f (x)xn−1 dx .
Uberzeugen Sie sich, dass dies wirklich Basen sind. Geben Sie dann die Werte der folgenden Ausdruckean.
Losung: Nach Definition des Polynomrings ist klar, dass A eine Basis ist. Wir zeigen, dass die Polynomein B linear unabhangig sind und daher aus Dimensionsgrunden eine Basis bilden: aus
λ(X −1)2 +µ(X −1)+ν = 0
folgt durch Vergleich der Terme proportional X2, dass λ = 0 gilt. Vergleich der Terme proportional Xliefert µ = 0, nun ist ν = 0 offensichtlich.Wir zeigen, dass die Elemente in C ∗ linear unabhangig sind und daher aus Dimensionsgrunden eine Basisbilden: gilt
λc∗1 +µc∗2 +νc∗3 = 0 ,
so wenden wir dies auf das Polynom (X − 2)(X − 3) an, um λ = 0 zu schließen, auf (X − 1)(X − 3) umauch µ = 0 zu sehen, ν = 0 ist nun offensichtlich.Wir zeigen, dass die Elemente in D∗ linear unabhangig sind und daher aus Dimensionsgrunden eine Basisbilden: gilt
λd∗1 +µd∗2 +νd∗3 = 0 ,
so folgt fur alle f ∈ R2[X ] Z 1
0f (X)(λ+µX +νX2) = 0 .
Die Wahlen f = X0,X ,X2 geben ein System von drei linearen Gleichungen in den drei Variablen λ,µ,ν,aus dem folgt, dass alle drei Variablen verschwinden mussen.
1 a∗3(b3)
a∗3(b2)
2 b∗3(a3)Losung:Folgt sofort aus a3 = b3 +2b2 +b1.b∗2(a3)Losung:Folgt sofort aus a3 = b3 +2b2 +b1.
3 b∗1(a3)Losung:Folgt sofort aus a3 = b3 +2b2 +b1.b∗1(a2)Losung:Folgt sofort aus a2 = b2 +b1.
4 c∗3(a3)
Losung:
c∗3(a3) = a3(3) = 32 = 9.
c∗3(a2)
Losung:c∗3(a2) = a2(3) = 31 = 3.
5 a∗1(c1)
Losung: 3.Aus
0 = c∗2(c1) = c1(2) und 0 = c∗3(c1) = c1(3)
folgt, dass das Polynom c1 die Nullstellen 2,3 haben muss. Also
c1 = α(X −2)(X −3)
Aus 1 = c∗1(c1) = c1(1) = 2α folgt α = 12 . Somit
c1 =12
X2− 52
X +3 .
a∗1(c2)
Losung: -3.Aus
0 = c∗1(c2) = c2(1) und 0 = c∗3(c2) = c2(3)
folgt, dass das Polynom c2 die Nullstellen 1,3 haben muss. Also
c2 = α(X −1)(X −3)
Aus 1 = c∗2(c2) = c2(2) =−α folgt α =−1. Somit
c2 =−X2 +4X −3 .
6 a∗1(d1)
Losung: 9.
Man berechnet leicht, dass d1 = 30X2−36X +9 die richtigen Eigenschaften hat.a∗1(d2)
Losung: -36.Man berechnet leicht, dass d2 =−180X2 +192X −36 die richtigen Eigenschaf-ten hat.
3 V sei ein endlichdimensionaler K-Vektorraum
1 Ist die Spur, Sp : End(V ) → K, eine Linearform auf dem K-VektorraumEndK(V )?
Losung: Ja.
Offensichtlich ist die Abbildung linear,
Sp(λA+µB) = λSp(A)+µSp(B) .
© Ja /© Nein
2 Sei ρ ∈ EndK(V ) gegeben. Ist
EndK(V ) → Kφ 7→ Sp(ρ◦φ)
eine Linearform auf EndK(V )?
© Ja /© Nein
Sei ρ ∈ EndK(V ) gegeben. Ist
EndK(V )×EndK(V ) → K(φ1,φ2) 7→ Sp(φ1 ◦ρ◦φ2)
eine Bilinearform auf EndK(V )?
© Ja /© Nein

3 Ist die Determinante, det : EndK(V )→ K, eine Linearform auf EndK(V )?
Losung: Nein.
Die Determinante ist multilinear (nicht linear) bezuglich Skalarmultiplikation,und nicht linear bezuglich der Addition von Matrizen.Also Gegenbeispiel: det(2 · IdV ) = 2dimV , aber 2det(IdV ) = 2 .
© Ja /© Nein
4 Sei A eine geordnete Basis von V . Ist
EndK(V ) → Kφ 7→ (MA(φ))11
eine Linearform auf EndK(V )?
© Ja /© Nein
5 Sei V = Rn, aufgefasst als euklidischer Vektorraum mit dem Standard-Skalarprodukt. Ist die zugehorige Norm, x 7→ ‖x‖, eine Linearform auf V ?
Losung: Nein.
Die Norm erfullt die Eigenschaft (‖λx‖= |λ|‖x‖), vertauscht also nicht mit derMultiplikation mit Skalaren. Die Dreiecksungleichung besagt, dass
‖x‖+‖y‖ ≥ ‖x+ y‖ .
Also Gegenbeispiel: ‖x+(−x)‖= 0, aber ‖x‖+‖− x‖= 2‖x‖.
© Ja /© Nein
Sei V = Rn, aufgefasst als euklidischer Vektorraum mit dem Standard-Skalarprodukt. Ist das Normquadrat, x 7→ ‖x‖2, eine Linearform auf V ?
Losung: Nein.
Das Normquadrat respektiert weder die Multiplikation mit Skalaren noch dieAddition von Vektoren. Z.B. ‖λx‖2 = λ2‖x‖2 fur alle λ ∈ K.
© Ja /© Nein
6 Sei M ⊂V , M 6= V eine echte Teilmenge von V . Kann fur den Annulator M0 ={0} gelten?
Losung: Ja.
Nach Lemma 5.1.8 ii) der Vorlesung ist M0 = (spanK(M))0. Es folgt, dass M0 ={0}, sobald M ein Erzeugendensystem von V ist.
© Ja /© Nein
7 Sei M ⊂ V eine Teilmenge mit M0 = {0}. Muss M dann Erzeugendensystemvon V sein?
Losung: Ja.
Angenommen M ware kein Erzeugendensystem. Dann gibt es v ∈ V mit v 6∈spanK(M), sowie eine Linearform, die auf spanK(M) verschwindet, nicht aberauf v. Das widerspricht unserer Annahme.
© Ja /© Nein
Die folgenden Aufgaben sind schriftlich zu bearbeiten.
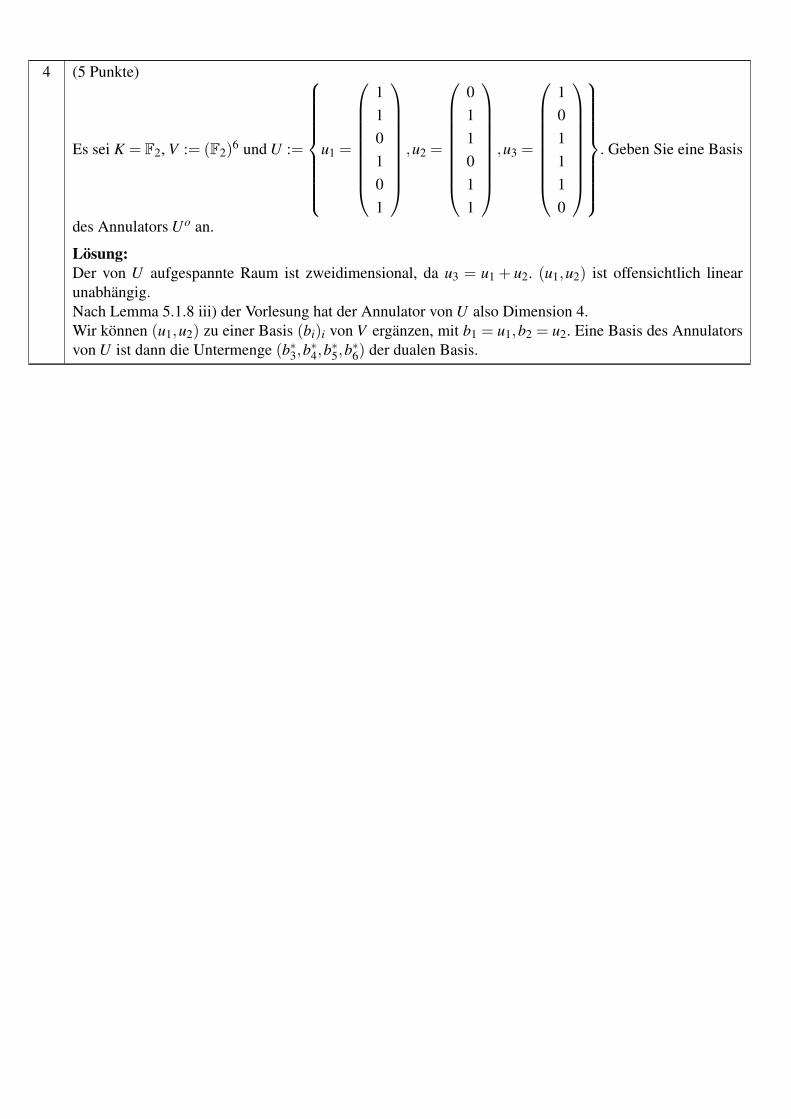
4 (5 Punkte)
Es sei K = F2, V := (F2)6 und U :=
u1 =
110101
,u2 =
011011
,u3 =
101110
. Geben Sie eine Basis
des Annulators Uo an.
Losung:Der von U aufgespannte Raum ist zweidimensional, da u3 = u1 + u2. (u1,u2) ist offensichtlich linearunabhangig.Nach Lemma 5.1.8 iii) der Vorlesung hat der Annulator von U also Dimension 4.Wir konnen (u1,u2) zu einer Basis (bi)i von V erganzen, mit b1 = u1,b2 = u2. Eine Basis des Annulatorsvon U ist dann die Untermenge (b∗3,b
∗4,b
∗5,b
∗6) der dualen Basis.

5 Es seien K ein Korper, n ∈ N und V := M(n×n,K).
a) (5 Punkte) Zeigen Sie: Ist A∈V und λA die durch λA(X) := tr(AX) definierte Abbildung von V nachK, so ist λA linear, d.h. es ist λA ∈V ∗.
b) (5 Punkte) Zeigen Sie: {λA |A ∈V}= V ∗.
c) (5 Punkte) Es sei U := {X ∈ V |Xi j = 0 fur i > j} die Menge der oberen Dreiecksmatrizen in V .Geben Sie eine Basis des Annulators U0 an, die aus Elementen der Form λEi j besteht, wobei Ei jeine Basismatrix ist.
d) (5 Punkte) Zeigen Sie, dass W = {λ ∈V ∗ |λ(XY ) = λ(Y X) fur alle X ,Y ∈V} ein Untervektorraumvon V ∗ ist, und geben Sie eine Basis dafur an.
e) (5 Punkte) Zeigen Sie, dass spanK({XY −Y X |X ,Y ∈ V}) = {Z ∈ V | tr(Z) = 0} ist. Hinweis: Be-trachten Sie die Standardbasis von V aus Basismatrizen Ei j.
Losung:
a) λA(rX + sY ) = tr(rAX + sAY ) = ∑i(rAX + sAY )ii = ∑
i(r(AX)ii + s(AY )ii) = rλA(X)+ sλA(Y ).
b) Aus Betrachtung 5.1.3 der Vorlesung wissen wir, dass dimV ∗ = n2. Wir zeigen nun, dass fur die n2
Basismatrizen Ei j die zugehorigen (λEi j)ni, j=1 linear unabhangig sind.
Man rechnet, dass λEi j(X) = X ji, wobei {Ei j} die Basismatrizen sind. Damit folgt, dass (λEi j)ni, j=1
linear unabhangig ist.
c) Wegen λEi j(X) = X ji gilt U0 = spanK(λEi j | j > i).
d) Die Untervektorraumeigenschaft ist klar. Wegen der zyklischen Invarianz der Spur liegen alle Viel-fachen von λEn in W. Wir zeigen nun, dass span(λEn) = W .
Dazu verwenden wir die Gleichung tr(AEi j) = A ji. Betrachte zunachst Basismatrizen X = Ei j undY = E jk mit i 6= k. Es gilt XY = Eik und Y X = 0. Aus tr(AXY ) = tr(AY X) folgt also Aki = 0, fur alleNichtdiagonaleintrage i 6= k.
Sei A also eine Diagonalmatrix. Setze nun X = Ei j und Y = E ji, so dass XY = Eii und Y X = E j j.Mit dem gleichen Argument wie zuvor folgt nun aus tr(AXY ) = tr(AY X) fur alle i und j, dass A einVielfaches der Einheitsmatrix sein muss.
e) Wegen der zyklischen Invarianz der Spur ist klar, dass jeder Kommutator die Spur Null hat, damitauch jede Linearkombination von Kommutatoren. Zu zeigen ist also, dass jede spurlose Matrix alsLinearkombination von Kommutatoren geschrieben werden kann.
Eine Basis fur den Untervektorraum der spurlosen Matrizen ist offenbar
B := (Ei j, Ekk−Ek+1,k+1 |∀i 6= j, k = 1, . . . ,n−1) .
Diese Basiselemente konnen alle wie folgt als Kommutatoren dargestellt werden:
∀i 6= j : Ei j = EikEk j−Ek jEik
fur beliebiges k sowie
∀i : Eii−Ei+1,i+1 = Ei,i+1Ei+1,i−Ei+1,iEi,i+1 .

6 Es seien K ein Korper und n ∈ N. Fur ρ ∈ M(n×n,K) definieren wir
Φρ : M(n×n,K)×M(n×n,K)→ K
durchΦρ(A,B) := Sp(AρB) .
(i) (5 Punkte) Zeigen Sie, dass Φρ eine Bilinearform auf dem K-Vektorraum M(n×n,K) ist.
(ii) (5 Punkte) Fur welche Matrizen ρ ist die Bilinearform symmetrisch?
(iii) (5 Punkte) Fur welche Matrizen ρ ist die Bilinearform nicht ausgeartet?
Losung:
(ii) Wir benutzen Basismatrizen:A = Ei j B = Epq
Es folgt Φρ(A,B) = ρ jpδqi und Φρ(B,A) = ρqiδ jp. Setzt man i = q, so folgt aus Φρ(A,B) = Φρ(B,A)die Gleichung ρ jp = ρiiδ jp; nur Vielfache der Einheitsmatrix geben also eine symmetrische Biline-arform.
(iii) Die Matrix ρ muss invertierbar sein.
Denn sei ρ invertierbar und sei fur gegebenes A Sp(AρB) = 0 fur alle B. Dann gilt insbesonderefur alle B = ρ−1Ei j dass A ji = Sp(AρB) = 0. Also folgt, dass A = 0 gelten muss, wenn Φρ nichtausgeartet ist.
Umgekehrt, sei Φρ nicht ausgeartet. Angenommen ρ ware nicht invertierbar. Dann konnen wir B 6= 0finden (namlich eine Matrix deren Spaltenvektoren alle im Kern von ρ liegen), so dass ρB = 0 gilt.Das widerspricht der Annahme, dass Φρ nicht ausgeartet ist. Also muss ρ invertierbar sein.
7 (5 Punkte)Sei K ein Korper und V ein n-dimensionaler K-Vektorraum. Seien f ,g ∈V ∗ von Null verschiedene Line-arformen auf V . Zeigen Sie:Es ist ker( f ) = ker(g), genau dann, wenn es ein c ∈ K \{0} gibt, so dass f = cg.
Losung:Sei ker( f ) = ker(g). Wir zeigen, dass dann f = cg ist. Sei U = ker( f ) = ker(g). Wegen f ,g 6= 0 istdimKU = n−1. Sei (ui)i=1,...,n−1 eine Basis von U . Wir erganzen diese Basis zu einer Basis (ui)i=1,...,n vonV . Dann ist f (ui) = λg(ui) = 0 fur i < n und fur alle λ ∈ K. Wegen g(un) 6= 0 und f (un) 6= 0 ist c := f (un)
g(un)
wohldefiniert und von Null verschieden. Damit ist f (un) = f (un)g(un)g(un)
= cg(un) und somit f = cg.Die Umkehrung folgt leicht.
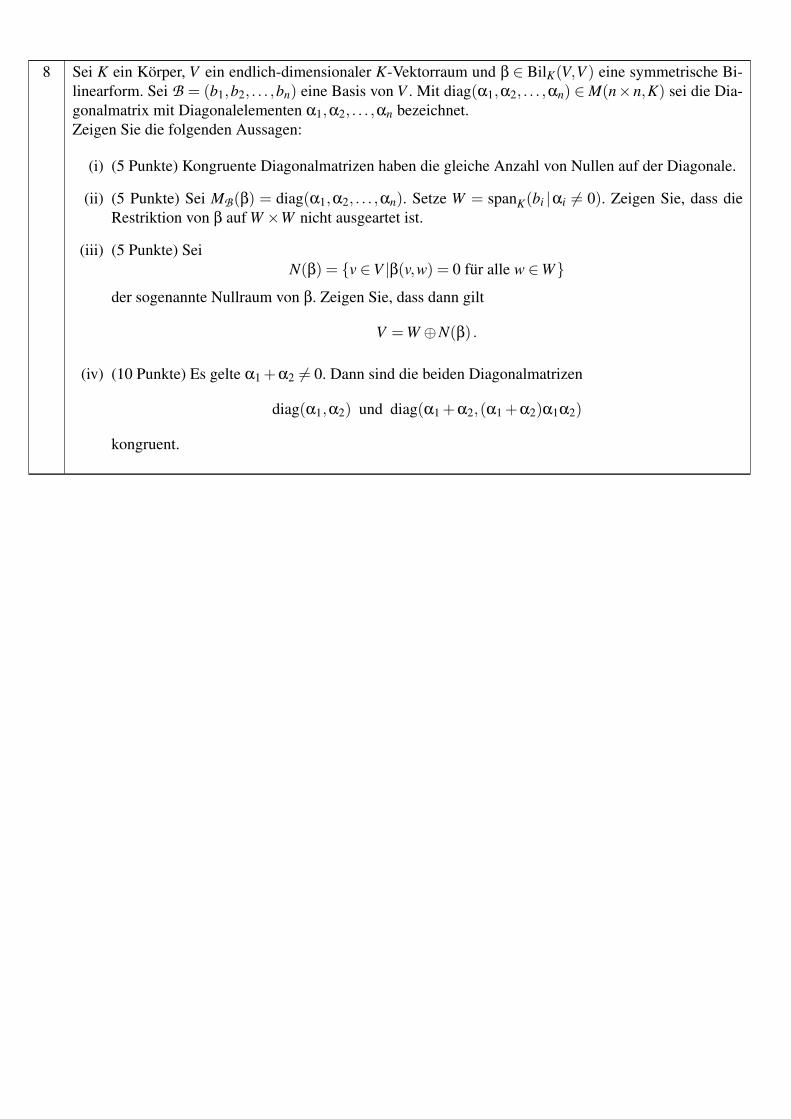
8 Sei K ein Korper, V ein endlich-dimensionaler K-Vektorraum und β ∈ BilK(V,V ) eine symmetrische Bi-linearform. Sei B = (b1,b2, . . . ,bn) eine Basis von V . Mit diag(α1,α2, . . . ,αn) ∈ M(n×n,K) sei die Dia-gonalmatrix mit Diagonalelementen α1,α2, . . . ,αn bezeichnet.Zeigen Sie die folgenden Aussagen:
(i) (5 Punkte) Kongruente Diagonalmatrizen haben die gleiche Anzahl von Nullen auf der Diagonale.
(ii) (5 Punkte) Sei MB(β) = diag(α1,α2, . . . ,αn). Setze W = spanK(bi |αi 6= 0). Zeigen Sie, dass dieRestriktion von β auf W ×W nicht ausgeartet ist.
(iii) (5 Punkte) SeiN(β) = {v ∈V |β(v,w) = 0 fur alle w ∈W}
der sogenannte Nullraum von β. Zeigen Sie, dass dann gilt
V = W ⊕N(β) .
(iv) (10 Punkte) Es gelte α1 +α2 6= 0. Dann sind die beiden Diagonalmatrizen
diag(α1,α2) und diag(α1 +α2,(α1 +α2)α1α2)
kongruent.
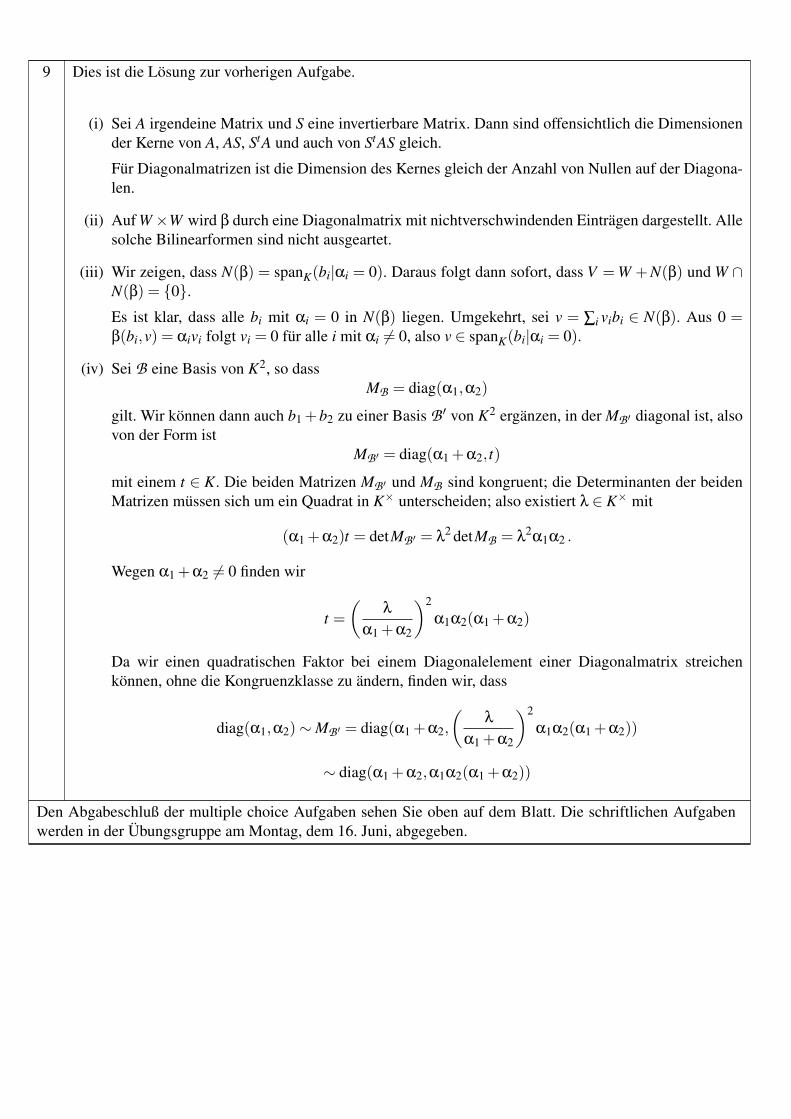
9 Dies ist die Losung zur vorherigen Aufgabe.
(i) Sei A irgendeine Matrix und S eine invertierbare Matrix. Dann sind offensichtlich die Dimensionender Kerne von A, AS, StA und auch von StAS gleich.
Fur Diagonalmatrizen ist die Dimension des Kernes gleich der Anzahl von Nullen auf der Diagona-len.
(ii) Auf W ×W wird β durch eine Diagonalmatrix mit nichtverschwindenden Eintragen dargestellt. Allesolche Bilinearformen sind nicht ausgeartet.
(iii) Wir zeigen, dass N(β) = spanK(bi|αi = 0). Daraus folgt dann sofort, dass V = W + N(β) und W ∩N(β) = {0}.
Es ist klar, dass alle bi mit αi = 0 in N(β) liegen. Umgekehrt, sei v = ∑i vibi ∈ N(β). Aus 0 =β(bi,v) = αivi folgt vi = 0 fur alle i mit αi 6= 0, also v ∈ spanK(bi|αi = 0).
(iv) Sei B eine Basis von K2, so dassMB = diag(α1,α2)
gilt. Wir konnen dann auch b1 +b2 zu einer Basis B ′ von K2 erganzen, in der MB ′ diagonal ist, alsovon der Form ist
MB ′ = diag(α1 +α2, t)
mit einem t ∈ K. Die beiden Matrizen MB ′ und MB sind kongruent; die Determinanten der beidenMatrizen mussen sich um ein Quadrat in K× unterscheiden; also existiert λ ∈ K× mit
(α1 +α2)t = detMB ′ = λ2 detMB = λ
2α1α2 .
Wegen α1 +α2 6= 0 finden wir
t =(
λ
α1 +α2
)2
α1α2(α1 +α2)
Da wir einen quadratischen Faktor bei einem Diagonalelement einer Diagonalmatrix streichenkonnen, ohne die Kongruenzklasse zu andern, finden wir, dass
diag(α1,α2)∼ MB ′ = diag(α1 +α2,
(λ
α1 +α2
)2
α1α2(α1 +α2))
∼ diag(α1 +α2,α1α2(α1 +α2))
Den Abgabeschluß der multiple choice Aufgaben sehen Sie oben auf dem Blatt. Die schriftlichen Aufgabenwerden in der Ubungsgruppe am Montag, dem 16. Juni, abgegeben.
Ex 1, Qu 1, Var 1: [’Falsch’]Ex 1, Qu 1, Var 2: [’Falsch’]Ex 1, Qu 2, Var 1: [’Wahr’]Ex 1, Qu 2, Var 2: [’Wahr’]Ex 1, Qu 3, Var 1: [’Wahr’]Ex 1, Qu 3, Var 2: [’Wahr’]Ex 1, Qu 4, Var 1: [’Wahr’]Ex 1, Qu 5, Var 1: [’Wahr’]Ex 1, Qu 5, Var 2: [’Wahr’]Ex 1, Qu 6, Var 1: [’Wahr’]Ex 1, Qu 7, Var 1: [’Wahr’]Ex 1, Qu 8, Var 1: [’Wahr’]Ex 1, Qu 8, Var 2: [’Wahr’]Ex 1, Qu 9, Var 1: [’Wahr’]
Ex 2, Qu 1, Var 1: [’1’]Ex 2, Qu 1, Var 2: [’0’]Ex 2, Qu 2, Var 1: [’1’]Ex 2, Qu 2, Var 2: [’2’]Ex 2, Qu 3, Var 1: [’1’]Ex 2, Qu 3, Var 2: [’1’]Ex 2, Qu 4, Var 1: [’9’]Ex 2, Qu 4, Var 2: [’3’]Ex 2, Qu 5, Var 1: [’3’]Ex 2, Qu 5, Var 2: [’-3’]Ex 2, Qu 6, Var 1: [’9’]Ex 2, Qu 6, Var 2: [’-36’]
Ex 3, Qu 1, Var 1: [’Ja’]Ex 3, Qu 2, Var 1: [’Ja’]Ex 3, Qu 2, Var 2: [’Ja’]Ex 3, Qu 3, Var 1: [’Nein’]Ex 3, Qu 4, Var 1: [’Ja’]Ex 3, Qu 5, Var 1: [’Nein’]Ex 3, Qu 5, Var 2: [’Nein’]Ex 3, Qu 6, Var 1: [’Ja’]Ex 3, Qu 7, Var 1: [’Ja’]

Ubungsblatt 10zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph SchweigertErstellt am 23.06.2008, 17:02 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist23.06.2008, 08:00 Uhr.
11 Sei V der Vektorraum der beliebig oft differenzierbaren reell-wertigen Funktio-nen auf dem offenen Intervall (−1,1). Sei
s : V ×V → Rs( f ,g) = ( f g)′(0)
Dann ist s eine alternierende Bilinearform auf V .
Losung:Falsch. s( f ,g) ist offensichtlich symmetrisch bezuglich f und g.
© Wahr /© Falsch
Sei V der Vektorraum der beliebig oft differenzierbaren reell-wertigen Funktio-nen auf dem offenen Intervall (−1,1). Sei
s : V ×V → Rs( f ,g) = ( f g)′(0)
Dann ist s eine symmetrische Bilinearform auf V .
Losung:Wahr. Man sieht leicht, dass s linear und symmetrisch in beiden Argumenten ist.
© Wahr /© Falsch
2 Sei V der Vektorraum der beliebig oft differenzierbaren reell-wertigen Funktio-nen auf dem offenen Intervall (−1,1). Sei
s : V ×V → Rs( f ,g) = ( f g)′(0)
Der Nullraum von s enthalt die Funktionen, die am Punkt x = 0 verschwindenund dort einen Wendepunkt haben.
Losung:Falsch. Der Nullraum von s besteht aus all den Funktionen, die zusammen mitihrer ersten Ableitung bei x = 0 verschwinden. An einem Wendepunkt muss abernur die zweite Ableitung verschwinden.
© Wahr /© Falsch

Sei V der Vektorraum der beliebig oft differenzierbaren reell-wertigen Funktio-nen auf dem offenen Intervall (−1,1). Sei
s : V ×V → Rs( f ,g) = ( f g)′(0)
Der Nullraum von s enthalt die Funktionen, die am Punkt x = 0 verschwindenund dort ein Maximum haben.
Losung:Wahr. Der Nullraum von s besteht aus all den Funktionen, die zusammen mitihrer ersten Ableitung bei x = 0 verschwinden. Letzteres ist der Fall, wenn dieFunktion bei x = 0 ein Extremum (Maximum oder Minimum) oder einen Wen-depunkt mit horizontaler Tangente hat.
© Wahr /© Falsch
3 Sei V der Vektorraum der beliebig oft differenzierbaren reell-wertigen Funktio-nen auf dem offenen Intervall (−1,1). Sei
s : V ×V → Rs( f ,g) = ( f g)′(0)
Im Nullraum von s liegen genau die Funktionen, die am Punkt x = 0 verschwin-den und ein Extremum haben.
Losung:Falsch. Der Nullraum von s besteht aus all den Funktionen, die zusammen mitihrer ersten Ableitung bei x = 0 verschwinden. Letzteres ist der Fall, wenn dieFunktion bei x = 0 ein Extremum (Maximum oder Minimum) oder aber einenWendepunkt mit horizontaler Tangente hat. Es gibt also Funktionen im Null-raum, die kein Extremum bei x = 0 haben.
© Wahr /© Falsch
4 Sei V ein reeller Vektorraum und β eine symmetrische Bilinearform auf V . SeiB = (b1,b2, . . . ,bn) eine Basis von V , fur die β(bi,b j) > 0 gilt. Dann ist β positivdefinit.
Losung:
Falsch. Gegenbeispiel: Mit (βi j) =
(1 22 1
)und v = e1− e2 ist β(v,v) =−2.
© Wahr /© Falsch
5 Sei V ein reeller Vektorraum und β eine symmetrische Bilinearform auf V . SeiB = (b1,b2, . . . ,bn) eine Basis von V , fur die β(bi,b j)≥ 0 gilt. Dann ist β positivsemidefinit.
Losung:
Falsch. Gegenbeispiel: Mit (βi j) =
(1 22 1
)und v = e1− e2 ist β(v,v) =−2.
© Wahr /© Falsch

6 Sei V ein reeller Vektorraum und β eine symmetrische Bilinearform auf V . SeiB = (b1,b2, . . . ,bn) eine Basis von V , fur die β(bi,b j) = αiδi, j gilt. Ist αi ≥ 0 furi = 1, . . . ,n, so ist β positiv semidefinit.
Losung:Wahr. Fur einen beliebigen Vektor v = ∑
jv jb j erhalt man β(v,v) =
∑j,k
v jvkβ(b j,bk) = ∑j
α j v2j ≥ 0.
© Wahr /© Falsch
7 Sei V ein reeller Vektorraum.Es gibt eine positiv definite Bilinearform β und eine Basis B = (b1,b2, . . . ,bn),so dass
β(bi,b j) < 0 fur i 6= j
gilt.
Losung: Wahr. Zum Beispiel die Bilinearform auf R2, die durch die Matrix(1 −1
2−1
2 1
)
gegeben ist. Es gilt
q(x1b1 + x2b2) = (x1)2− x1x2 +(x2)2 =12(x1− x2)2 +
12(x1)2 +
12(x2)2 ≥ 0 ,
so dass diese Form positiv definit ist.
© Wahr /© Falsch
8 Sei V ein reeller Vektorraum.Es gibt eine positiv definite Bilinearform β und eine Basis B = (b1,b2, . . . ,bn),so dass
β(bi,bi) < 0 furalle i = 1, . . . ,n
gilt.
© Wahr /© Falsch
21 Sei V ein euklidischer Vektorraum, der nicht unbedingt endlich-dimensional ist.Dann gilt fur jedes Paar U1,U2 von Untervektorraumen von V
(U1 +U2)⊥ = U⊥1 ∩U⊥
2 .
Losung:Wahr. Sei v ∈ (U1 +U2)⊥. Da Ui ⊆U1 +U2 steht v insbesondere auf allen Vek-toren aus Ui senkrecht, also liegt v in U⊥
1 ∩U⊥2 .
Umgekehrt sei v∈U⊥1 ∩U⊥
2 . Jeder Vektor u∈U1 +U2 schreibt sich - moglicher-weise nicht eindeutig - in der Form u = u1 +u2 mit ui ∈Ui. Da v senkrecht auf U1und U2 steht, folgt 〈u1,v〉= 0 und 〈u2,v〉= 0, zusammen also 〈u1 +u2,v〉= 0.
© Wahr /© Falsch

2 Sei V ein euklidischer Vektorraum, der nicht unbedingt endlich-dimensional ist.Dann gilt fur jedes Paar U1,U2 von Untervektorraumen von V
U⊥1 +U⊥
2 ⊆ (U1∩U2)⊥ .
Losung:Ein Vektor in U⊥
1 +U⊥2 schreibt sich als u1 +u2 mit ui ∈U⊥
i . Ist v ∈U1∩U2, sofolgt 〈u1 + u2,v〉 = 〈u1,v〉+ 〈u1,v〉 = 0 + 0 = 0, da zum ersten v ∈U1 und zumzweiten v ∈U2 gilt.
© Wahr /© Falsch
Sei V ein endlich-dimensionaler euklidischer Vektorraum. Dann gilt fur jedesPaar U1,U2 von Untervektorraumen von V
U⊥1 +U⊥
2 = (U1∩U2)⊥ .
Losung:Wahr.
(U1∩U2)⊥ =((U⊥
1 )⊥∩ (U⊥2 )⊥
)⊥=((
U⊥1 +U⊥
2
)⊥)⊥= U⊥
1 +U⊥2 .
Hier haben wir die oben gezeigte Gleichung (U1 +U2)⊥ = U⊥1 ∩U⊥
2 verwendet,sowie die fur endliche Vektorraume U gultige Identitat (U⊥)⊥ = U .
© Wahr /© Falsch
3 Die Matrix
17
2 3 63 −6 26 2 3
in M(3×3,R) liegt in SO(3).
Losung:Falsch. Eine Matrix A ∈M(n×n,R) ist genau dann orthogonal, wenn ihre Spal-tenvektoren eine Orthonormalbasis von Rn bilden. Gleichermaßen gilt: eine Ma-trix A ∈ M(n× n,R) ist genau dann orthogonal, wenn ihre Zeilenvektoren eineOrthonormalbasis von Rn bilden. Denn AAt = En ist aquivalent zu
δi j =n
∑k=1
aikatk j =
n
∑k=1
aika jk .
Hier bilden die Spaltenvektoren der Matrix keine Orthonormalbasis (Skalarpro-dukt von erstem und drittem Vektor ist z.B. nichtverschwindend). Die Determi-nante ist auch nicht gleich 1.
© Wahr /© Falsch
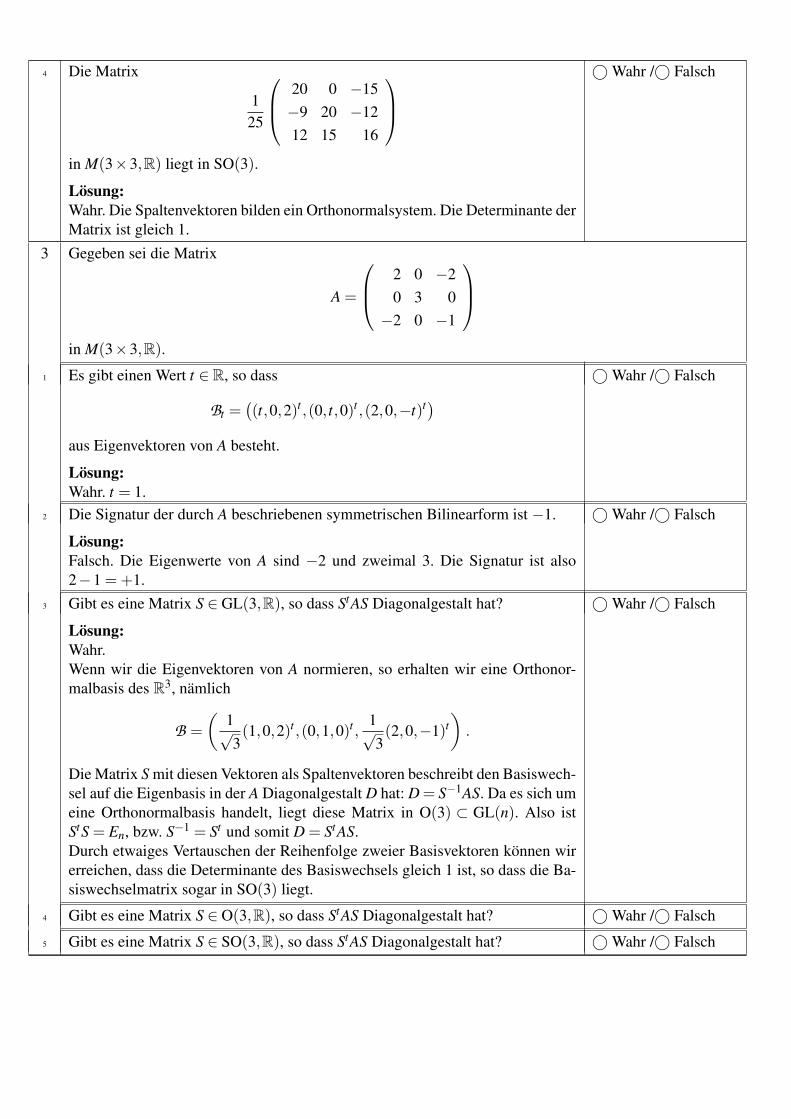
4 Die Matrix
125
20 0 −15−9 20 −1212 15 16
in M(3×3,R) liegt in SO(3).
Losung:Wahr. Die Spaltenvektoren bilden ein Orthonormalsystem. Die Determinante derMatrix ist gleich 1.
© Wahr /© Falsch
3 Gegeben sei die Matrix
A =
2 0 −20 3 0
−2 0 −1
in M(3×3,R).
1 Es gibt einen Wert t ∈ R, so dass
Bt =((t,0,2)t ,(0, t,0)t ,(2,0,−t)t)
aus Eigenvektoren von A besteht.
Losung:Wahr. t = 1.
© Wahr /© Falsch
2 Die Signatur der durch A beschriebenen symmetrischen Bilinearform ist −1.
Losung:Falsch. Die Eigenwerte von A sind −2 und zweimal 3. Die Signatur ist also2−1 = +1.
© Wahr /© Falsch
3 Gibt es eine Matrix S ∈ GL(3,R), so dass StAS Diagonalgestalt hat?
Losung:Wahr.Wenn wir die Eigenvektoren von A normieren, so erhalten wir eine Orthonor-malbasis des R3, namlich
B =(
1√3(1,0,2)t ,(0,1,0)t ,
1√3(2,0,−1)t
).
Die Matrix S mit diesen Vektoren als Spaltenvektoren beschreibt den Basiswech-sel auf die Eigenbasis in der A Diagonalgestalt D hat: D = S−1AS. Da es sich umeine Orthonormalbasis handelt, liegt diese Matrix in O(3) ⊂ GL(n). Also istStS = En, bzw. S−1 = St und somit D = StAS.Durch etwaiges Vertauschen der Reihenfolge zweier Basisvektoren konnen wirerreichen, dass die Determinante des Basiswechsels gleich 1 ist, so dass die Ba-siswechselmatrix sogar in SO(3) liegt.
© Wahr /© Falsch
4 Gibt es eine Matrix S ∈ O(3,R), so dass StAS Diagonalgestalt hat? © Wahr /© Falsch
5 Gibt es eine Matrix S ∈ SO(3,R), so dass StAS Diagonalgestalt hat? © Wahr /© Falsch
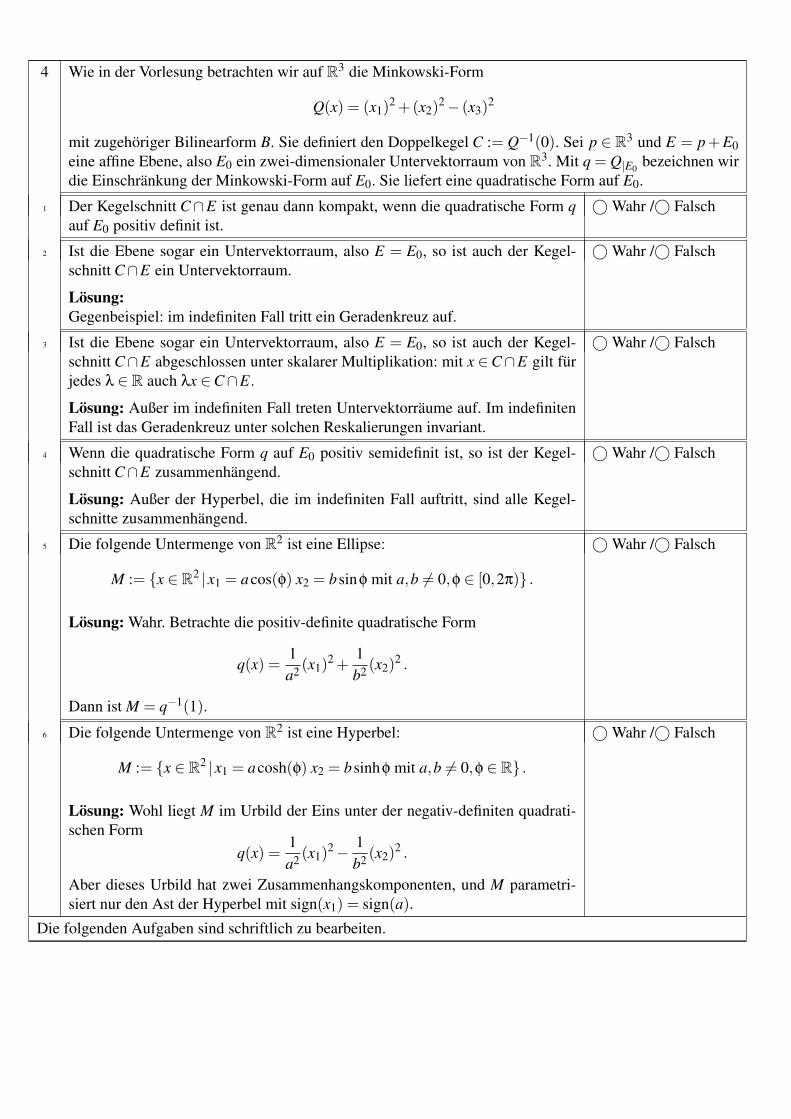
4 Wie in der Vorlesung betrachten wir auf R3 die Minkowski-Form
Q(x) = (x1)2 +(x2)2− (x3)2
mit zugehoriger Bilinearform B. Sie definiert den Doppelkegel C := Q−1(0). Sei p ∈ R3 und E = p +E0eine affine Ebene, also E0 ein zwei-dimensionaler Untervektorraum von R3. Mit q = Q|E0 bezeichnen wirdie Einschrankung der Minkowski-Form auf E0. Sie liefert eine quadratische Form auf E0.
1 Der Kegelschnitt C∩E ist genau dann kompakt, wenn die quadratische Form qauf E0 positiv definit ist.
© Wahr /© Falsch
2 Ist die Ebene sogar ein Untervektorraum, also E = E0, so ist auch der Kegel-schnitt C∩E ein Untervektorraum.
Losung:Gegenbeispiel: im indefiniten Fall tritt ein Geradenkreuz auf.
© Wahr /© Falsch
3 Ist die Ebene sogar ein Untervektorraum, also E = E0, so ist auch der Kegel-schnitt C∩E abgeschlossen unter skalarer Multiplikation: mit x ∈C∩E gilt furjedes λ ∈ R auch λx ∈C∩E.
Losung: Außer im indefiniten Fall treten Untervektorraume auf. Im indefinitenFall ist das Geradenkreuz unter solchen Reskalierungen invariant.
© Wahr /© Falsch
4 Wenn die quadratische Form q auf E0 positiv semidefinit ist, so ist der Kegel-schnitt C∩E zusammenhangend.
Losung: Außer der Hyperbel, die im indefiniten Fall auftritt, sind alle Kegel-schnitte zusammenhangend.
© Wahr /© Falsch
5 Die folgende Untermenge von R2 ist eine Ellipse:
M := {x ∈ R2 |x1 = acos(φ) x2 = bsinφ mit a,b 6= 0,φ ∈ [0,2π)} .
Losung: Wahr. Betrachte die positiv-definite quadratische Form
q(x) =1a2 (x1)2 +
1b2 (x2)2 .
Dann ist M = q−1(1).
© Wahr /© Falsch
6 Die folgende Untermenge von R2 ist eine Hyperbel:
M := {x ∈ R2 |x1 = acosh(φ) x2 = bsinhφ mit a,b 6= 0,φ ∈ R} .
Losung: Wohl liegt M im Urbild der Eins unter der negativ-definiten quadrati-schen Form
q(x) =1a2 (x1)2− 1
b2 (x2)2 .
Aber dieses Urbild hat zwei Zusammenhangskomponenten, und M parametri-siert nur den Ast der Hyperbel mit sign(x1) = sign(a).
© Wahr /© Falsch
Die folgenden Aufgaben sind schriftlich zu bearbeiten.

5 (5 Punkte)Sei K ein Korper, in dem 1+1 6= 0 gilt, und V ein K-Vektorraum. Zeigen Sie, dass man jede Bilinearformβ auf V als Summe einer symmetrischen und einer alternierenden Bilinearform schreiben kann.
Losung:Wir definieren die symmetrische Bilinearform
β+(v,w) :=
12(β(v,w)+β(w,v))
und die alternierende Bilinearform
β−(v,w) :=
12(β(v,w)−β(w,v)) .
Offensichtlich ist β(v,w) = β+(v,w)+β−(v,w).
6 (5 Punkte)Bezeichne × das Vektorprodukt auf R3. Zeigen Sie, dass dann fur alle A ∈ O(3) die folgende Gleichheitgilt:
Av×Aw = det(A) ·A(v×w)
Losung:Sei x ∈ R3 beliebig.Da A orthogonal ist, folgt
〈Ax,A(v×w)〉= 〈x,v×w〉 .
Andererseits ist bekanntermaßen 〈·, · × ·〉 eine alternierende Multilinearform auf V mit dimV = 3, alsofindet man nach Aufgabe 8 von Blatt 4
〈Ax,Av×Aw〉= det(A)〈x,v×w〉
Da A als Element von O(3) invertierbar ist, gilt fur alle y ∈ R3
〈y,Av×Aw〉= det(A)〈A−1y,v×w〉= 〈y,(detA)A(v×w)〉.
Dies gilt fur alle y ∈ R3; da 〈·, ·〉 nicht ausgeartet ist, folgt Av×Aw = det(A) ·A(v×w).

7 (10 Punkte)Zeigen Sie:Ist β ∈ Bil(V,V ) eine nicht-ausgeartete Bilinearform mit der Eigenschaft
∀x,y ∈V : (β(x,y) = 0)⇔ (β(y,x) = 0) ,
dann ist β entweder symmetrisch, d.h.
∀x,y ∈V : β(x,y) = β(y,x) ,
oder aber schiefsymmetrisch, d.h.
∀x,y ∈V : β(x,y) =−β(y,x) .
Hinweis: Verwenden Sie Satz 5.2.9 aus der Vorlesung.
Losung:Satz 5.2.9 impliziert, dass es fur jede nicht-ausgeartete Bilinearform β einen Endomorphismus f : V →Vgibt, so dass
β(y,x) = β( f (x),y) .
Wahle nun ein beliebiges x 6= 0 aus V . Sei M = span(x) der zugehorige eindimensionale Vektorraum. DieMenge der dazu orthogonalen Vektoren ist M⊥ = {y ∈V |β(x,y) = 0}.Wegen der vorausgesetzten Verschwindenseigenschaft von β folgt, dass
∀y ∈M⊥ : 0 = β(y,x) = β( f (x),y) ,
also f (x) ∈ (M⊥)⊥. Da ebenfalls wegen der Verschwindungseigenschaft von β das orthogonale Rechts-komplement und das orthogonale Linkskomplement identisch sind, folgt mit β nicht entartet, dass f (x) ∈span(x).Daher muss x also Eigenvektor von f sein. Da aber x ∈ V beliebig war, kann f nur ein Vielfaches derIdentitat sein,
f = λidV .
Aus β(x,y) = β( f (y),x) = β( f (x), f (y)) = λ2β(x,y) fur alle x,y ∈V folgt schließlich λ =±1.
8 i) (5 Punkte) Sei β : Rn×Rn → R eine symmetrische Bilinearform. Sei B die darstellende Matrix vonβ in der Standardbasis von Rn. Seien v1 und v2 Eigenvektoren von B zu verschiedenen Eigenwertenλ1 und λ2. Zeigen Sie, dass dann v1 und v2 orthogonal bezuglich β sind, also β(v1,v2) = 0.
Wir betrachten nun die symmetrische Bilinearform
β : R4×R4 → R
mitβ(a,b) := 3a1b2 +3a2b1−2a1b3−2a3b1 +2a2b4 +2a4b2−3a3b4−3a4b3
fur a = (a1,a2,a3,a4) ∈ R4 und b = (b1,b2,b3,b4) ∈ R4.
ii) (5 Punkte) Geben Sie die darstellende Matrix von β in der Standardbasis an und bestimmen Sie ihreEigenvektoren.
iii) (5 Punkte) Finden Sie mit i) und ii) eine Basis B des R4, so dass MB(β) eine Diagonalmatrix ist,deren Diagonalelemente in {±1,0} liegen.
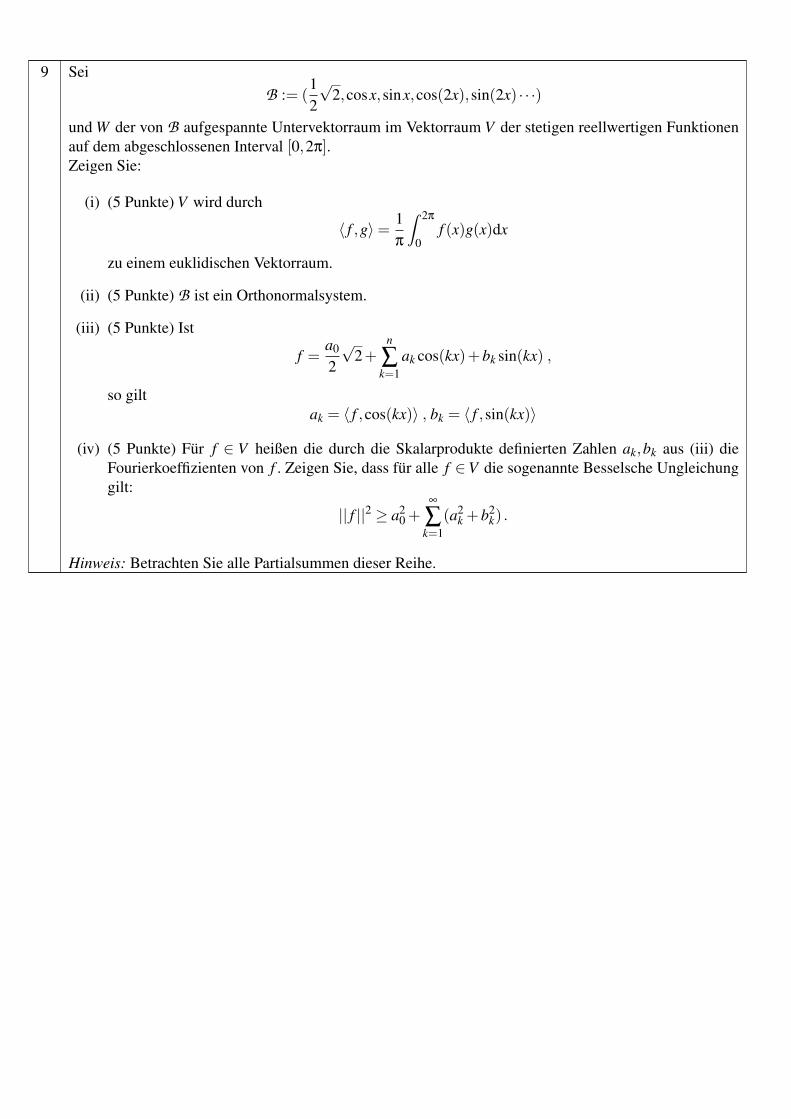
9 SeiB := (
12
√2,cosx,sinx,cos(2x),sin(2x) · · ·)
und W der von B aufgespannte Untervektorraum im Vektorraum V der stetigen reellwertigen Funktionenauf dem abgeschlossenen Interval [0,2π].Zeigen Sie:
(i) (5 Punkte) V wird durch
〈 f ,g〉=1π
Z 2π
0f (x)g(x)dx
zu einem euklidischen Vektorraum.
(ii) (5 Punkte) B ist ein Orthonormalsystem.
(iii) (5 Punkte) Ist
f =a0
2
√2+
n
∑k=1
ak cos(kx)+bk sin(kx) ,
so giltak = 〈 f ,cos(kx)〉 , bk = 〈 f ,sin(kx)〉
(iv) (5 Punkte) Fur f ∈ V heißen die durch die Skalarprodukte definierten Zahlen ak,bk aus (iii) dieFourierkoeffizienten von f . Zeigen Sie, dass fur alle f ∈V die sogenannte Besselsche Ungleichunggilt:
|| f ||2 ≥ a20 +
∞
∑k=1
(a2k +b2
k) .
Hinweis: Betrachten Sie alle Partialsummen dieser Reihe.
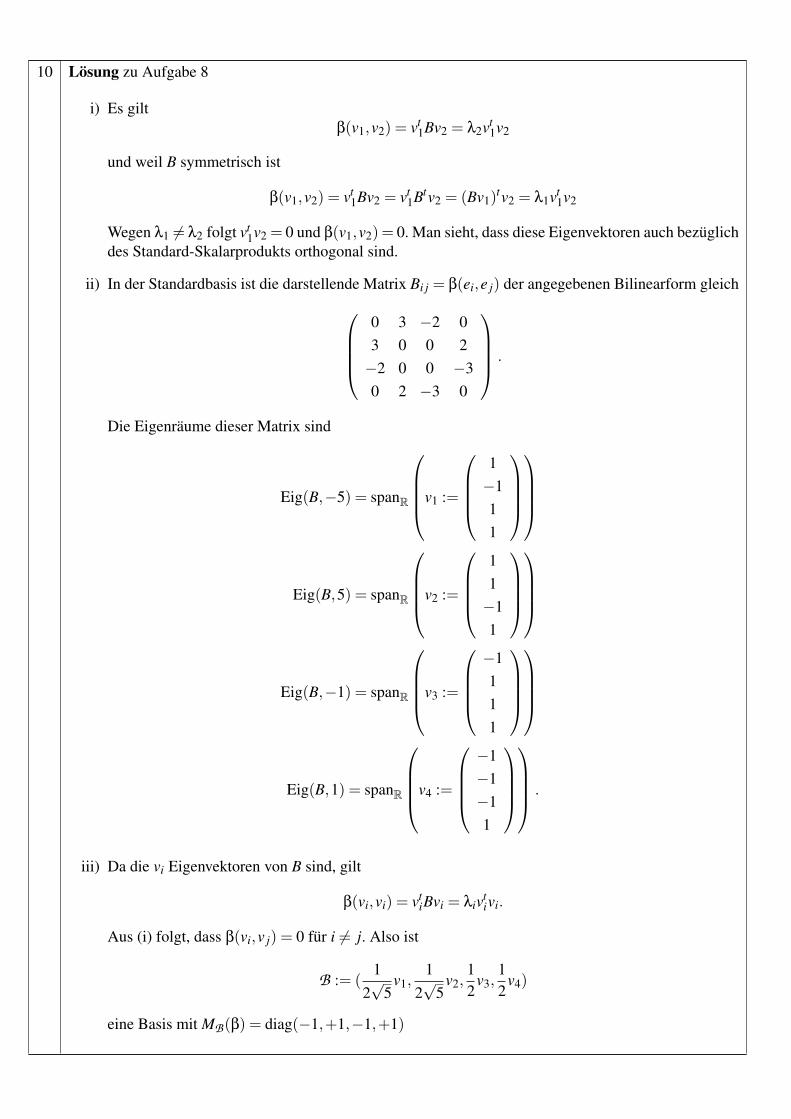
10 Losung zu Aufgabe 8
i) Es giltβ(v1,v2) = vt
1Bv2 = λ2vt1v2
und weil B symmetrisch ist
β(v1,v2) = vt1Bv2 = vt
1Btv2 = (Bv1)tv2 = λ1vt1v2
Wegen λ1 6= λ2 folgt vt1v2 = 0 und β(v1,v2) = 0. Man sieht, dass diese Eigenvektoren auch bezuglich
des Standard-Skalarprodukts orthogonal sind.
ii) In der Standardbasis ist die darstellende Matrix Bi j = β(ei,e j) der angegebenen Bilinearform gleich0 3 −2 03 0 0 2−2 0 0 −30 2 −3 0
.
Die Eigenraume dieser Matrix sind
Eig(B,−5) = spanR
v1 :=
1−111
Eig(B,5) = spanR
v2 :=
11−11
Eig(B,−1) = spanR
v3 :=
−1111
Eig(B,1) = spanR
v4 :=
−1−1−11
.
iii) Da die vi Eigenvektoren von B sind, gilt
β(vi,vi) = vtiBvi = λivt
ivi.
Aus (i) folgt, dass β(vi,v j) = 0 fur i 6= j. Also ist
B := (1
2√
5v1,
12√
5v2,
12
v3,12
v4)
eine Basis mit MB(β) = diag(−1,+1,−1,+1)

11 Losung zu Aufgabe 9:
i) Die angegebene Abbildung 〈·, ·〉 ist sicherlich bilinear, symmetrisch und positiv definit, also eineuklidisches Skalarprodukt.
ii) Aus den Additionstheoremen fur die Sinus- und Kosinusfunktion folgen die Identitaten
cos(kx)cos(k′x) =12(cos((k + k′)x)+ cos((k− k′)x)
),
sin(kx)sin(k′x) =12(cos((k− k′)x)− cos((k + k′)x)
)und
cos(kx)sin(k′x) =12(sin((k + k′)x)− sin((k− k′)x)
).
Unter Verwendung dieser Gleichungen, sowie der bestimmten Integrale
12π
2πZ0
cos(kx)dx =
{0 fur k 6= 01 fur k = 0
und1
2π
2πZ0
sin(kx)dx = 0 fur k ∈ N
folgt
⟨cos(kx),cos(k′x)
⟩=
1π
2πZ0
cos(kx)cos(k′x)dx
=1
2π
2πZ0
(cos((k + k′)x)+ cos((k− k′)x)
)dx
= δk,k′
und analog 〈sin(kx),sin(k′x)〉= δk,k′ , sowie 〈sin(kx),cos(k′x)〉= 0.
Demnach ist B ein Orthonormalsystem.
iii) Folgt wegen Lemma 5.5.9 der Vorlesung direkt aus der Orthonormalitat von B .
iv) Wir bezeichnen die Elemente des Orthonormalsystems mit φ j und die Komponenten von f mit c j =〈 f ,φ j〉. Wir zerlegen f in seine orthogonale Projektion u auf den von φ j aufgespannten UnterraumU und die Projektion v = f −u auf U⊥, also
u = f −n
∑j=0
c jφ j , v =n
∑j=0
c jφ j .
so dass u+v = f . Aus dem Satz von Pythagoras, ‖ f‖2 = 〈a+b,a+b〉= ‖a‖2 +‖b‖2, folgt nun furalle Partialsummen die Abschatzung
|| f ||2 ≥ a20 +
l
∑k=1
(a2k +b2
k) .
Da die Folge der Partialsummen ∑lk=1(a
2k + b2
k) ist also nach oben beschrankt und offensichtlichmonoton wachsen, also konvergent. Ihr limes, der Wert der Reihe, ist also nach oben beschrankt.

Den Abgabeschluß der multiple choice Aufgaben sehen Sie oben auf dem Blatt. Die schriftlichen Aufgabenwerden in der Ubungsgruppe am Montag, dem 23. Juni, abgegeben.
Ex 1, Qu 1, Var 1: [’Falsch’]Ex 1, Qu 1, Var 2: [’Wahr’]Ex 1, Qu 2, Var 1: [’Falsch’]Ex 1, Qu 2, Var 2: [’Wahr’]Ex 1, Qu 3, Var 1: [’Falsch’]Ex 1, Qu 4, Var 1: [’Falsch’]Ex 1, Qu 5, Var 1: [’Falsch’]Ex 1, Qu 6, Var 1: [’Wahr’]Ex 1, Qu 7, Var 1: [’Wahr’]Ex 1, Qu 8, Var 1: [’Falsch’]
Ex 2, Qu 1, Var 1: [’Wahr’]Ex 2, Qu 2, Var 1: [’Wahr’]Ex 2, Qu 2, Var 2: [’Wahr’]Ex 2, Qu 3, Var 1: [’Falsch’]Ex 2, Qu 4, Var 1: [’Wahr’]
Ex 3, Qu 1, Var 1: [’Wahr’]Ex 3, Qu 2, Var 1: [’Falsch’]Ex 3, Qu 3, Var 1: [’Wahr’]Ex 3, Qu 4, Var 1: [’Wahr’]Ex 3, Qu 5, Var 1: [’Wahr’]
Ex 4, Qu 1, Var 1: [’Wahr’]Ex 4, Qu 2, Var 1: [’Falsch’]Ex 4, Qu 3, Var 1: [’Wahr’]Ex 4, Qu 4, Var 1: [’Wahr’]Ex 4, Qu 5, Var 1: [’Wahr’]Ex 4, Qu 6, Var 1: [’Falsch’]
Ubungsblatt 11zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph SchweigertErstellt am 09.07.2008, 14:46 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist30.06.2008, 08:00 Uhr.
11 Gehort die Matrix1√2
(12 +
√3
2 i 12 −
√3
2 i
−12 −
√3
2 i 12 −
√3
2 i
)zur Gruppe U(2)?
Losung:Ja. Das Matrixprodukt mit der adjungierten Matrix ergibt die Einheitsmatrix.
© Ja /© Nein
Gehort die Matrix (12 +
√3
2 i 12 −
√3
2 i
−12 −
√3
2 i 12 −
√3
2 i
)zur Gruppe U(2)?
Losung:Nein. Das Matrixprodukt mit der adjungierten Matrix ist nicht die Einheitsma-trix, sondern ein Vielfaches der Einheitsmatrix.
© Ja /© Nein
Gehort die Matrix12
(12 +
√3
2 i 12 −
√3
2 i
−12 −
√3
2 i 12 −
√3
2 i
)zur Gruppe U(2)?
Losung:Nein. Das Matrixprodukt mit der adjungierten Matrix ist nicht die Einheitsma-trix, sondern ein Vielfaches der Einheitsmatrix.
© Ja /© Nein
2 Gehort die Matrix1√2
(12 +
√3
2 i 12 −
√3
2 i
−12 −
√3
2 i 12 −
√3
2 i
)zur Gruppe SU(2)?
Losung:Ja. Das Matrixprodukt mit der adjungierten Matrix ergibt die Einheitsmatrix,und die Determinante ist gleich 1.
© Ja /© Nein
Gehort die Matrix1
(1+ i)
(12 +
√3
2 i 12 −
√3
2 i
−12 −
√3
2 i 12 −
√3
2 i
)zur Gruppe SU(2)?
Losung:Nein. Das Matrixprodukt mit der adjungierten Matrix ist nicht die Einheitsma-trix, sondern ein Vielfaches der Einheitsmatrix.
© Ja /© Nein
Gehort die Matrix (12 +
√3
2 i 12 −
√3
2 i
−12 −
√3
2 i 12 −
√3
2 i
)zur Gruppe SU(2)?
Losung:Nein. Das Matrixprodukt mit der adjungierten Matrix ist nicht die Einheitsma-trix, sondern ein Vielfaches der Einheitsmatrix.
© Ja /© Nein
3 Gibt es unitare Matrizen, die auch nilpotent sind?
Losung:Nein. Unitare Matrizen haben eine Determinante vom Betrag 1. Nilpotente Ma-trizen aber haben immer verschwindende Determinante.
© Ja /© Nein
4 Gibt es orthogonale Matrizen, die auch nilpotent sind?
Losung:Nein. Orthogonale Matrizen haben Determinante ±1. Nilpotente Matrizen aberhaben immer verschwindende Determinante.
© Ja /© Nein
5 Gibt es in U(n), fur n≥ 2, unendlich viele selbstadjungierte Matrizen?
Losung:Ja. Z.B. gibt es in M(2× 2,C) mit den Spiegelungsmatrizen Sθ schon unend-lich viele symmetrische Matrizen (mit Determinante−1), die zur Einheitsmatrixquadrieren, fur die also gilt (Sθ)∗Sθ = (Sθ)2 = Id.Allgemeiner setze
SU = U∗
(1 00 −1
)U
fur U eine beliebige unitare Matrix. SU ist selbstadjungiert und unitar.
© Ja /© Nein
6 Gibt es in SU(2) unendlich viele selbstadjungierte Matrizen?
Losung:Nein.Sei A∈ SU(2) selbstadjungiert. Nach Satz 5.6.9 gibt es eine Orthonormalbasis inder A Diagonalgestalt M hat, mit rellen Werten auf der Diagonalen. Wegen Id =M∗M = M2 sind die Eintrage auf der Diagonalen gleich ±1. Wegen det(A) = 1ist mussen beide Eintrage gleich 1 oder beide gleich −1 sein, also M =±Id.Wenn S die Matrix des Basiswechsels ist, so gilt also auch A = S−1MS =±Id.Es gibt also nur zwei selbstadjungierte Matrizen in SU(2).
© Ja /© Nein
7 Ist die folgende Aussage wahr?Eine Matrix A ∈ M(n×n,R) ist genau dann orthogonal, wenn ihre Spaltenvek-toren eine Orthonormalbasis von Rn bezuglich des Standard-Skalarprodukts bil-den.
© Ja /© Nein
Ist die folgende Aussage wahr?Eine Matrix A ∈ M(n× n,R) ist genau dann orthogonal, wenn ihre Zeilenvek-toren eine Orthonormalbasis von Rn bezuglich des Standard-Skalarprodukts bil-den.
© Ja /© Nein
8 Ist die folgende Aussage wahr?Eine Matrix A ∈ M(n× n,R) liegt genau dann in SO(n), wenn ihre Spalten-vektoren eine Orthonormalbasis von Rn bezuglich des Standard-Skalarproduktsbilden.Losung:Gegenbeispiel: (
1 00 −1
).
© Ja /© Nein
Ist die folgende Aussage wahr?Eine Matrix A ∈ M(n× n,R) liegt genau dann in SO(n), wenn ihre Zeilenvek-toren eine Orthonormalbasis von Rn bezuglich des Standard-Skalarprodukts bil-den.Losung:Gegenbeispiel: (
1 00 −1
).
© Ja /© Nein
9 Ist die folgende Aussage wahr?Eine Matrix A ∈ M(n× n,C) liegt genau dann in U(n), wenn ihre Spalten-vektoren eine Orthonormalbasis von Cn bezuglich des komplexen Standard-Skalarprodukts bilden.
© Ja /© Nein
Ist die folgende Aussage wahr?Eine Matrix A ∈ M(n× n,C) liegt genau dann in U(n), wenn ihre Zeilen-vektoren eine Orthonormalbasis von Cn bezuglich des komplexen Standard-Skalarprodukts bilden.
© Ja /© Nein
10 Ist die folgende Aussage wahr?Eine Matrix A ∈ M(n× n,C) liegt genau dann in SU(n), wenn ihre Spalten-vektoren eine Orthonormalbasis von Cn bezuglich des komplexen Standard-Skalarprodukts bilden.
© Ja /© Nein
Ist die folgende Aussage wahr?Eine Matrix A ∈ M(n× n,C) liegt genau dann in SU(n), wenn die Zeilen-vektoren eine Orthonormalbasis von Cn bezuglich des komplexen Standard-Skalarprodukts bilden.
© Ja /© Nein
21 Sei V ein unitarer Vektorraum. Ist ein Endomorphismus ϕ ∈ End(V ) selbstad-jungiert und nilpotent, so gilt ϕ = 0.
Losung:Wahr. Wir wissen, dass es eine Orthonormalbasis gibt, in der die darstellendeMatrix von ϕ Diagonalgestalt hat mit den Eigenwerten auf der Diagonalen. Auchdie darstellende Matrix ist naturlich nilpotent, es folgt, dass alle Eigenwerte Nullsind, damit ist die darstellende Matrix die Nullmatrix.
© Wahr /© Falsch
2 Sei V ein unitarer Vektorraum. Seien die Endomorphismen ϕ,ψ∈End(V ) selbst-adjungiert. Dann ist auch ϕ◦ψ selbstadjungiert.
Losung:Falsch. Nur wenn ϕ und ψ vertauschen, denn (ϕ◦ψ)∗ = ψ∗ ◦ϕ∗ = ψ◦ϕ.
© Wahr /© Falsch
3 Sei V ein unitarer Vektorraum. Seien die Endomorphismen ϕ,ψ∈End(V ) unitar.Dann ist auch ϕ◦ψ−1 unitar.
Losung:Wahr. Die unitaren Matrizen bilden eine Gruppe. Explizit: Aus ϕ∗ = ϕ−1 undψ∗ = ψ−1 folgt
(ϕ◦ψ−1)∗ = ψ
∗−1 ◦ϕ∗ = ψ◦ϕ
−1 = (ϕ◦ψ−1)−1 .
© Wahr /© Falsch
4 Sei V ein unitarer Vektorraum. Seien die Endomorphismen ϕ,ψ∈End(V ) selbst-adjungiert und gelte ψ◦ϕ = ϕ◦ψ. Dann ist auch ϕ◦ψ selbstadjungiert.
Losung:Wahr. Denn
(ϕ◦ψ)∗ = ψ∗ ◦ϕ
∗ = ψ◦ϕ = ϕ◦ψ .
© Wahr /© Falsch
31 Die Eigenwerte eines selbstadjungierten Endomorphismus eines unitaren Vek-torraum sind immer reell.
Losung:Wahr. Denn wenn ϕ selbstadjungiert und v ein normierter Eigenvektor zum Ei-genwert λ ist, dann folgt
λ = 〈ϕ(v),v〉= 〈v,ϕ(v)〉= λ .
© Wahr /© Falsch
2 Die Eigenwerte eines orthogonalen Endomorphismus sind immer gleich +1 odergleich −1.
Losung:Wahr. Denn wenn ϕ orthogonal und v ein normierter Eigenvektor zum Eigenwertλ ist, dann folgt
λ2 = 〈ϕ(v),ϕ(v)〉= 〈v,v〉
= 1 .
© Wahr /© Falsch
3 Die Eigenwerte eines unitaren Endomorphismus haben immer den Betrag 1.
Losung:Wahr. Denn wenn ϕ unitar und v ein normierter Eigenvektor zum Eigenwert λ
ist, dann folgt
|λ|2 = 〈ϕ(v),ϕ(v)〉= 〈v,v〉= 1 .
© Wahr /© Falsch

4 Eigenvektoren unitarer Matrizen zu verschiedenen Eigenwerten sind immer or-thogonal zueinander.
Losung:Wahr. Denn seien v und w Eigenvektoren des unitaren Endomorphismus ϕ zuden Eigenwerten λ und ρ. Dann gilt
(λ−ρ)〈v,w〉 = 〈ϕ(v),w〉−〈v,ϕ−1(w)〉= 0 .
Hierbei haben wir verwendet, dass (ϕ(w) = ρw)⇒ (ϕ−1(w) = ρ−1w = ρw), daEigenwerte unitarer Endomorphismen immer den Betrag 1 haben.
© Wahr /© Falsch
5 Jedes Element in SO(2n) (fur alle 1≤ n ∈ N) hat mindestens einen Eigenwert.
Losung:Falsch. Jede nichtriviale Drehmatrix in SO(2) hat keinen (reellen) Eigenwert.
© Wahr /© Falsch
6 Sei β ∈ Bil(V,V ) eine (moglicherweise ausgeartete) Bilinearform auf V und seiϕ ∈ End(V ) orthogonal bezuglich β.Dann ist ϕ injektiv.
Losung:Falsch. Wenn β ausgeartet ist folgt dies nicht. Sei z.B. β die triviale Bilinear-form, die immer den Wert Null annimmt. Dann sind alle Endomorphismen vonV orthogonal bezuglich β.
© Wahr /© Falsch
7 Sei β ∈ Bil(V,V ) eine nicht ausgeartete Bilinearform auf V und sei ϕ ∈ End(V )orthogonal bezuglich β.Dann ist ϕ injektiv.
Losung:Wahr. Angenommen es gibt 0 6= v∈ ker(ϕ), so gilt fur alle w∈W β(ϕ(v),w) = 0.Andererseits gibt es, da β nicht entartet sein soll, ein w0 ∈W mit
0 6= β(v,w0) = β(ϕ(v),ϕ(w0)) ,
was ein Widerspruch ist.
© Wahr /© Falsch
8 Sei ϕ ein orthogonaler Endomorphismus von V = Rn, versehen mit dem Stan-dardskalarprodukt. Wir konnen ϕ auch als Endomorphismus von Cn auffassen.Dann ist ϕ unitar bezuglich des Standardskalarproduktes auf Cn.
Losung:Wahr. Wahle z.B. die Standardbasis von Rn. ϕ wird in dieser durch eine reelleMatrix M dargestellt, fur die gilt MtM = En.Auch als Endomorphismus von Cn wird ϕ durch die Matrix M dargestellt, diewir nun als eine Matrix in M(n×n,C) auffassen, deren Eintrage alle reell sind.Diese hat also die spezielle Eigenschaft M = M. Es folgt, dass
M∗M = (M)tM = MtM = En .
© Wahr /© Falsch
4 Sei (V,〈·, ·〉) ein euklidischer und (W,〈·, ·〉) ein unitarer Vektorraum. Ein Endomorphismus ϕ in End(V )oder End(W ) heißt anti-selbstadjungiert, wenn 〈ϕ(v),w〉=−〈v,ϕ(w)〉 fur alle Vektoren v,w.Wichtig:Bei manchen Fragen kommt es darauf an, ob die komplexe oder reelle Situation vorliegt. Bitte achtenSie daher stets darauf, ob sich eine Frage auf V – also auf den reellen Fall – oder auf W – also auf denkomplexen Fall – bezieht.
1 Die durch A =
(0 −11 0
)dargestellte Abbildung auf V = R2 ist anti-
selbstadjungiert.
Losung:Wahr. Denn At =−A.
© Wahr /© Falsch
2 Fur dimR(V ) = 2 gibt es immer eine Basis B von V , so dass der anti-selbstadjungierte Endomorphismus ϕ ∈ End(V ) dargestellt wird durch
MB(ϕ) = λ
(0 −11 0
)mit λ ∈ R.
Losung:Wahr. Sei B = (e1,e2) eine Orthonormalbasis.Aus MB(ϕ) jk = 〈e j,ϕ(ek)〉 = −〈ϕ(e j),ek〉 = −〈ek,ϕ(e j)〉 = −MB(ϕ)k j folgt,dass MB(ϕ) antisymmetrisch ist.
© Wahr /© Falsch
3 Wenn ϕ ∈ End(V ) anti-selbstadjungiert ist, dann ist fur jede Basis B von V dieMatrix MB(ϕ) schiefsymmetrisch.
© Wahr /© Falsch
4 Wenn ϕ ∈ End(V ) anti-selbstadjungiert ist, dann gilt 〈ϕ(v),v〉= 0 fur alle v ∈V . © Wahr /© Falsch
5 Wenn ϕ ∈ End(W ) anti-selbstadjungiert ist, dann gilt 〈ϕ(w),w〉= 0 fur alle w ∈W .
Losung:Falsch. ϕ = iIdW ist anti-selbstadjungiert.
© Wahr /© Falsch
6 Wenn ϕ ∈ End(W ) anti-selbstadjungiert ist, dann sind alle seine Eigenwertegleich 0.
Losung:Falsch. ϕ = i IdW ist anti-selbstadjungiert.
© Wahr /© Falsch
7 Wenn ϕ ∈ End(V ) anti-selbstadjungiert ist, dann sind alle seine Eigenwertegleich 0.
Losung:Wahr. Sei v normierter Eigenvektor zum Eigenwert λ. Dann folgt λ = 〈v,ϕ(v)〉=−〈ϕ(v),v〉=−λ. Hier verwenden wir, dass ϕ anti-selbstadjungiert ist, und dass〈·, ·〉 symmetrisch ist.Im Komplexen gilt dagegen
λ = 〈v,ϕ(v)〉=−〈ϕ(v),v〉=−λ〈v,v〉=−λ
Also ist λ rein imaginar.
© Wahr /© Falsch
Die folgenden Aufgaben sind schriftlich zu bearbeiten.

5 (10 Punkte)Sei V ein endlich-dimensionaler euklidischer Vektorraum und ϕ ∈ End(V ). Ein injektiver Endomorphis-mus ϕ heißt winkeltreu, wenn fur alle Innenwinkel
α(v,w) = α(ϕ(v),ϕ(w))
fur alle v,w ∈V \{0} gilt.Zeigen Sie, dass ϕ genau dann winkeltreu ist, wenn es einen orthogonalen Endomorphismus ψ ∈ End(V )und λ ∈ R\{0} gibt, so dass ϕ = λψ gilt.
Losung:Per definitionem gilt
cosα(v,w) =〈v,w〉√〈v,v〉〈w,w〉
.
Wenn also ϕ = λψ proportional zu einem orthogonalen Endomorphismus ist, so folgt
cosα(ϕ(v),ϕ(w)) =〈ψ(v),ψ(w)〉√
〈ψ(v),ψ(v)〉〈ψ(w),ψ(w)〉= cosα(v,w) .
Fur die Ruckrichtung betrachte die Abbildung ψ := ϕ∨ ◦ϕ.Sei b ein beliebiger Vektor in V \{0} und u im orthogonalen Komplement von b. Dann gilt auch ϕ(u) ⊥ϕ(b), also
〈ψ(b),u〉= 〈ϕ(u),ϕ(b)〉= 0
Es muss also ψ(b) im von b aufgespannten ein-dimensionalen Unterraum liegen. Somit sind alle Vektorenvon V Eigenvektoren von ψ. Somit ist ψ ein Vielfaches der Identitat, ψ = λidV (siehe auch Blatt 8, Aufgabe5).Wegen
λ|b|2 = 〈ψ(b),b〉= 〈ϕ(b),ϕ(b)〉= |ϕ(b)|2
ist λ positiv. Daraus folgt, dass 1√λ
ϕ orthogonal ist.
6 (5 Punkte)Seien A,B ∈ O(n) mit n ungerade. Zeigen Sie, dass dann
det((A+B)(A−B)) = 0
gilt.
Losung:Da A invertierbar ist, konnen wir wie folgt umformen:
det((A+B)(A−B)) = det(A(En +A−1B)A(En−A−1B)
)= (det(A))2 det(En +A−1B)det(En−A−1B) .
Aus Satz 5.6.8 der Vorlesung angewandt auf A−1B ∈O(n) folgt, dass es, fur n ungerade, immer eine Basisgibt, in der (A−1B)11 =±1 ist und sonst in der ersten Spalte und Zeile nur Nullen stehen.Es folgt entweder det(En +A−1B) = 0 oder det(En−A−1B) = 0.

7 Es sei V = R3, ϕ : V →V linear und B eine Basis von V mit
MB(ϕ) = A =
1 −2 −1−2 1 −1−1 −1 5
2
.
(a) (5 Punkte) Ist ϕ diagonalisierbar?
(b) (5 Punkte) Es sei β : V ×V → R die Bilinearform auf V mit darstellender Matrix MB(β) = A.Berechnen Sie eine Orthogonalbasis von V bezuglich β.
(c) (5 Punkte) Bestimmen Sie eine orthogonale Matrix P ∈ O(3), so dass P−1AP Diagonalgestalt hat.
(d) (5 Punkte) Sei
Qa = {
xyz
∈ R3 | x2−4xy−2xz+ y2−2yz+52
z2 = a}.
Beschreiben Sie fur a = 0 die Geometrie der Menge Qa. Aus wie vielen Zusammenhangskompo-nenten besteht die Menge Q−1?
8 Eine komplexe Struktur auf einem R-Vektorraum V ist ein Endomorphismus J von V mit J2 = −idV .Zeigen Sie:
(i) (5 Punkte) Mit der skalaren Multiplikation (x+ iy) ·v := xv+yJ(v) fur x,y ∈R und v ∈V wird V zueinem C-Vektorraum.
(ii) (5 Punkte) Ist V endlich-dimensional, so ist dimRV gerade. Berechnen Sie auch dimCV !
Sei nun uberdies ω eine symplektische Bilinearform auf V . Die symplektische Form und die komplexeStruktur seien vertraglich in dem Sinne, dass fur alle v,w ∈V gilt
ω(Jv,Jw) = ω(v,w) .
(iii) (5 Punkte) Zeigen Sie, dass durch〈v,w〉 := ω(v,Jw)
eine symmetrische Bilinearform auf V definiert wird, und dass J bezuglich dieser symmetrischenBilinearform ein orthogonaler Endomorphismus ist, d.h. dass fur alle v,w ∈V gilt 〈Jv,Jw〉= 〈v,w〉.
(iv) (5 Punkte) Eine komplexe Struktur J heißt ω-kalibriert, wenn die symmetrische Bilinearform 〈·, ·〉positiv definit ist. Zeigen Sie, dass in diesem Fall
h(v,w) := 〈v,w〉− iω(v,w)
eine hermitesche Form fur die nach Teilaufgabe (i) von J induzierten C-Vektorraum-Struktur auf Vist.

9 Losung zu Aufgabe 7:
(a) Wir berechnen die Eigenwerte und Eigenvektoren von ϕ. Wir erhalten die Eigenvektoren
v1 =
221
, v2 =
−110
, v3 =
−102
,
zu den Eigenwerten λ1 = −32 , λ2 = λ3 = 3. Da die Familie (v1,v2,v3) linear unabhangig ist, ist ϕ
diagonalisierbar
(b) Wir bilden die gesuchte Orthogonalbasis bezuglich β aus der Basis (v1,v2,v3) von V . Wie wir be-reits aus Aufgabe 8 von Blatt 10 wissen, sind Eigenvektoren zu verschiedenen Eigenwerten dersymmetrischen darstellenden Matrix A bezuglich β orthogonal, also ist v1 orthogonal zu v2 und v3.Die restlichen Werte der Bilinearform berechnen sich zu
β(v1,v1) = (v1)tAv1 =−272
, β(v2,v2) = 6, β(v2,v3) = 3, β(v3,v3) = 15 .
Wir setzen b1 :=√
227v1. Wir betrachten die Einschrankung von β auf Eig(A,3)× Eig(A,3).
Fur v,w ∈ Eig(A,3) ist β(v,w) = vtAw = 3vtw = 3〈v,w〉, also ist die Einschrankung von β einpositives Vielfaches des Standardskalarprodukts und somit positiv definit. Also konnen wir dasSchmidtsche Orthonormalisierungsverfahren auf diese Einschrankung anwenden. Dazu setzen wirb2 = 1√
β(v2,v2)v2 = 1√
6v2. Dann betrachten wir
b3 := v3−β(v3,b2)b2 = v3−β(v3,v2)β(v2,v2)
v2 = v3−12
v2 =
−12
−122
.
Wir berechnen β(b3, b3) = 272 , also normieren wir
b3 :=
√227
b3 =1√54
−1−1
4
.
Nun ist √ 227
221
,1√6
−110
,1√54
−1−1
4
eine bezuglich β orthogonale Basis von R3, in der die darstellende Matrix von β sogar die Formdiag(−1,1,1) hat.

10 Fortsetzung der Losung zu Aufgabe 7:
(c) Wir mussen eine Basis (w1,w2,w3) des R3 aus Eigenvektoren von A finden, die bezuglich des Stan-dardskalarprodukts von R3 eine Orthonormalbasis bildet. In Aufgabe 8 auf Blatt 10 hatten wir ge-sehen, dass Eigenvektoren zu verschiedenen Eigenwerten der darstellenden Matrix einer symme-trischen Bilinearform auch bezuglich des Standardskalarprodukts orthogonal sind. Also wissen wirbereits, dass 〈v1,v2〉= 〈v1,v3〉= 0, bzw. 〈b1,b2〉= 〈b1,b3〉= 0 gilt.
Wir betrachten nun wieder die Einschrankung der Bilinearform β auf Eig(A,3)×Eig(A,3). Da dieseEinschrankung ein Vielfaches des Standardskalarprodukts ist, gilt also nach (b) auch 〈b2,b3〉 = 0.Die in (b) gefundene Basis (b1,b2,b3) ist also auch orthogonal bezuglich des Standardskalarpro-duktes. Wir mussen sie also nur anders normieren. Wir errechnen 〈b1,b1〉 = 2
3 , 〈b2,b2〉 = 13 und
〈b3,b3〉= 13 . Also ist
w1 =
√32
b1 =13
221
, w2 =√
3b2 =1√2
−110
, w3 =√
3b3 =1√18
−1−1
4
und damit
P = (w1,w2,w3) =
23 − 1√
2− 1√
1823
1√2− 1√
1813 0 4√
18
eine orthogonale Matrix mit P−1AP = diag(−3
2 ,3,3).
Bemerkung:
Durch Konjugation mit einer orthogonalen Matrix P lasst sich die Matrix A nicht in eine Matrix derForm diag(±1, . . . ,0 = uberfuhren, denn
D = P−1AP⇒ detD = detA
Beachten Sie, dass bei einer Diagonalmatrix die Eigenwerte auf der Diagonalen liegen.
(d) Es ist Qa = Q−1(a), wenn Q die zur Bilinearform β gehorende quadratische Form bezeichnet. Inder Basis (b1,b2,b3) aus (b) ist Qa = {v = x1b1 + x2b2 + x3b3|− x2
1 + x22 + x2
3 = a}. Fur a = 0 ergibtsich die Gleichung x2
1 = x22 + x2
3, also ist Q0 ein Doppelkegel, der rotationssymmetrisch um dieUrsprungsgerade Rb1 ist. Fur a =−1 ergibt sich x2
1 = 1+x22 +x2
3, dies nennt man ein zweischaligesHyperboloid, es hat zwei Zusammenhangskomponenten (und die gleiche Rotationssymmetrie wieder Doppelkegel Q0).

11 Losung zu Aufgabe 8:
i) Klar (Die Eigenschaft J2 =−idV wird nur fur die Bedingung (αβ)v = α(βv) mit α,β∈C und v∈Vgebraucht).
ii) Wir wenden die Determinante auf J2 =−idV an und erhalten det(J)2 = (−1)n. Da det(J)∈R, mussn gerade sein. Sei B = (b1, . . . ,bn) eine C-Basis des komplexen Vektorraums V . Dann ist B :=(b1,J(b1), . . .bn,J(bn)) eine R-Basis. Denn die Familie ist uber R linear unabhangig: die Gleichung
n
∑i=1
λibi +µiJ(bi) = 0
mit reellen Koeffizienten λi,µ ist mit ri := λi + iµi ∈ C offenbar aquivalent zur komplexen Linear-kombination
n
∑i=1
ribi = 0 ,
aus der ri = 0 und somit λi = µi = 0 folgt. Da sich jedes Element aus V in der Form
v =n
∑i=1
ribi
mit ri ∈ C schreiben lasst, also mit ri := λi + iµi in der Form
v =n
∑i=1
λibi +µiJ(bi)
ist auch klar, dass B ein R-Erzeugendensystem ist.
iii) R-Bilinearitat ist klar. Symmetrie folgt aus
〈w,v〉 ≡ ω(w,Jv) =−ω(Jv,w)= −ω(JJv,Jw) = ω(v,Jw)≡ 〈v,w〉 .
Orthogonalitat von J bezuglich ω folgt aus
〈Jv,Jw〉 ≡ ω(Jv,JJw) =−ω(Jv,w) =−ω(JJv,Jw)= ω(v,Jw)≡ 〈v,w〉 .
iv) Hermitizitat, h(w,v) = h(v,w), folgt aus der Symmetrie von 〈·, ·〉 und der Antisymmetrie von ω(·, ·).Wegen h(v,v) = 〈v,v〉 ist fur eine kalibrierte komplexe Struktur h auch positiv definit.
Sesquilinearitat folgt aus
h(i · v,w) = h(Jv,w) = ω(Jv,Jw)− iω(Jv,w) = ω(v,w)+ iω(v,Jw)= ih(v,w)
und
h(v, i ·w) = h(v,Jw) = ω(v,JJw)− iω(v,Jw) =−ω(v,w)− iω(v,Jw)= −ih(v,w) .
Den Abgabeschluß der multiple choice Aufgaben sehen Sie oben auf dem Blatt. Die schriftlichen Aufgabenwerden in der Ubungsgruppe am Montag, dem 30. Juni, abgegeben.
Ex 1, Qu 1, Var 1: [’Ja’]Ex 1, Qu 1, Var 2: [’Nein’]Ex 1, Qu 1, Var 3: [’Nein’]Ex 1, Qu 2, Var 1: [’Ja’]Ex 1, Qu 2, Var 2: [’Nein’]Ex 1, Qu 2, Var 3: [’Nein’]Ex 1, Qu 3, Var 1: [’Nein’]Ex 1, Qu 4, Var 1: [’Nein’]Ex 1, Qu 5, Var 1: [’Ja’]Ex 1, Qu 6, Var 1: [’Nein’]Ex 1, Qu 7, Var 1: [’Ja’]Ex 1, Qu 7, Var 2: [’Ja’]Ex 1, Qu 8, Var 1: [’Nein’]Ex 1, Qu 8, Var 2: [’Nein’]Ex 1, Qu 9, Var 1: [’Ja’]Ex 1, Qu 9, Var 2: [’Ja’]Ex 1, Qu 10, Var 1: [’Nein’]Ex 1, Qu 10, Var 2: [’Nein’]
Ex 2, Qu 1, Var 1: [’Wahr’]Ex 2, Qu 2, Var 1: [’Falsch’]Ex 2, Qu 3, Var 1: [’Wahr’]Ex 2, Qu 4, Var 1: [’Wahr’]
Ex 3, Qu 1, Var 1: [’Wahr’]Ex 3, Qu 2, Var 1: [’Wahr’]Ex 3, Qu 3, Var 1: [’Wahr’]Ex 3, Qu 4, Var 1: [’Wahr’]Ex 3, Qu 5, Var 1: [’Falsch’]Ex 3, Qu 6, Var 1: [’Falsch’]Ex 3, Qu 7, Var 1: [’Wahr’]Ex 3, Qu 8, Var 1: [’Wahr’]
Ex 4, Qu 1, Var 1: [’Wahr’]Ex 4, Qu 2, Var 1: [’Wahr’]Ex 4, Qu 3, Var 1: [’Falsch’]Ex 4, Qu 4, Var 1: [’Wahr’]Ex 4, Qu 5, Var 1: [’Falsch’]Ex 4, Qu 6, Var 1: [’Falsch’]Ex 4, Qu 7, Var 1: [’Wahr’]

Ubungsblatt 12zur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph SchweigertErstellt am 09.07.2008, 14:46 Uhr fur Matrikelnummer CHECKING ALL VARIANTS. Abgabezeitpunkt ist07.07.2008, 08:00 Uhr.
1 Sei (V,〈·, ·〉) ein euklidischer und (W,〈·, ·〉) ein unitarer Vektorraum. Ein Endomorphismus ϕ in End(V )oder End(W ) heißt anti-selbstadjungiert, wenn 〈ϕ(v),w〉=−〈v,ϕ(w)〉 fur alle Vektoren v,w gilt.Wichtig:Bei manchen Fragen kommt es darauf an, ob die komplexe oder reelle Situation vorliegt. Bitte achtenSie daher stets darauf, ob sich eine Frage auf V – also auf den reellen Fall – oder auf W – also auf denkomplexen Fall – bezieht.
1 Wenn 〈ϕ(v),v〉= 0 fur alle v ∈V , dann ist ϕ ∈ End(V ) anti-selbstadjungiert.
Losung:Wahr. Wahle beliebige Vektoren v1,v2 ∈V . Dann gilt
0 = 〈ϕ(v1 + v2),v1 + v2〉= 〈ϕ(v1),v1〉+ 〈ϕ(v2),v2〉+ 〈ϕ(v1),v2〉+ 〈ϕ(v2),v1〉= 〈v1,ϕ(v2)〉+ 〈ϕ(v1),v2〉 .
Im letzten Schritt haben wir die Symmetrie des reellen Skalarproduktes verwen-det.
© Wahr /© Falsch
2 Wenn 〈ϕ(w),w〉= 0 fur alle w ∈W , dann ist ϕ ∈ End(W ) anti-selbstadjungiert.
Losung:Falsch. Mit 〈ϕ(w),w〉= 0 gilt auch 〈iϕ(w),w〉= 0. Es konnen aber nicht ϕ undiϕ beide anti-selbstadjungiert sein. Betrachten Sie beispielsweise W = C2 mitdem Standardskalarprodukt. Dann ist
ϕ =
(0 1
−1 0
)
anti-selbstandjungiert, iϕ jedoch selbstadjungiert.
© Wahr /© Falsch
3 Wenn ϕ ∈ End(W ) anti-selbstadjungiert ist, dann ist es auch ϕ2.
Losung:Falsch. Dann ist ϕ2 selbstadjungiert.
© Wahr /© Falsch
Wenn ϕ ∈ End(W ) anti-selbstadjungiert ist, dann ist ϕ2 selbstadjungiert. © Wahr /© Falsch
4 Kein Element in O(9) ist anti-selbstadjungiert.
Losung: Wahr. Jedes Element ϕ ∈ O(9) hat nach Satz 5.6.8 wenigstens einenEigenvektor zum Eigenwert λ ∈ {−1,1}. Es folgt
λ|v|2 = 〈ϕ(v),v〉=−〈v,ϕ(v)〉=−λ|v|2 ,
was offensichtlich ein Widerspruch ist.
© Wahr /© Falsch
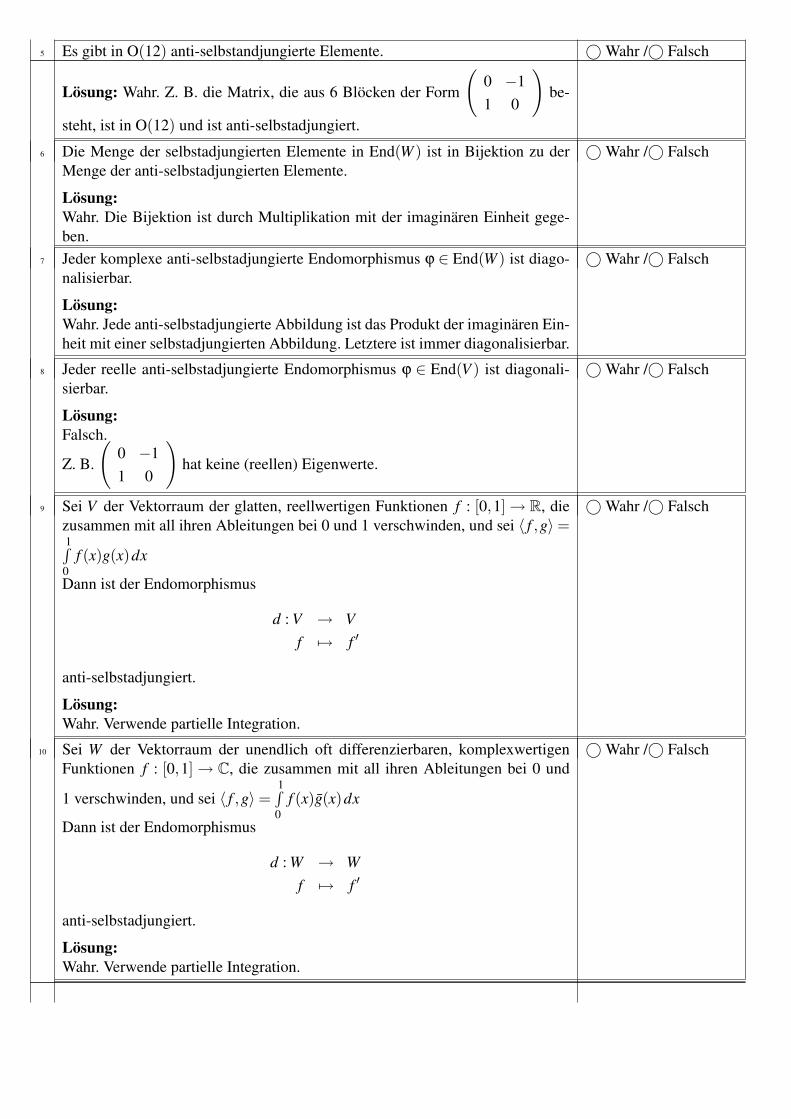
5 Es gibt in O(12) anti-selbstandjungierte Elemente.
Losung: Wahr. Z. B. die Matrix, die aus 6 Blocken der Form
(0 −11 0
)be-
steht, ist in O(12) und ist anti-selbstadjungiert.
© Wahr /© Falsch
6 Die Menge der selbstadjungierten Elemente in End(W ) ist in Bijektion zu derMenge der anti-selbstadjungierten Elemente.
Losung:Wahr. Die Bijektion ist durch Multiplikation mit der imaginaren Einheit gege-ben.
© Wahr /© Falsch
7 Jeder komplexe anti-selbstadjungierte Endomorphismus ϕ ∈ End(W ) ist diago-nalisierbar.
Losung:Wahr. Jede anti-selbstadjungierte Abbildung ist das Produkt der imaginaren Ein-heit mit einer selbstadjungierten Abbildung. Letztere ist immer diagonalisierbar.
© Wahr /© Falsch
8 Jeder reelle anti-selbstadjungierte Endomorphismus ϕ ∈ End(V ) ist diagonali-sierbar.
Losung:Falsch.
Z. B.
(0 −11 0
)hat keine (reellen) Eigenwerte.
© Wahr /© Falsch
9 Sei V der Vektorraum der glatten, reellwertigen Funktionen f : [0,1] → R, diezusammen mit all ihren Ableitungen bei 0 und 1 verschwinden, und sei 〈 f ,g〉=1R0
f (x)g(x)dx
Dann ist der Endomorphismus
d : V → Vf 7→ f ′
anti-selbstadjungiert.
Losung:Wahr. Verwende partielle Integration.
© Wahr /© Falsch
10 Sei W der Vektorraum der unendlich oft differenzierbaren, komplexwertigenFunktionen f : [0,1] → C, die zusammen mit all ihren Ableitungen bei 0 und
1 verschwinden, und sei 〈 f ,g〉=1R0
f (x)g(x)dx
Dann ist der Endomorphismus
d : W → Wf 7→ f ′
anti-selbstadjungiert.
Losung:Wahr. Verwende partielle Integration.
© Wahr /© Falsch
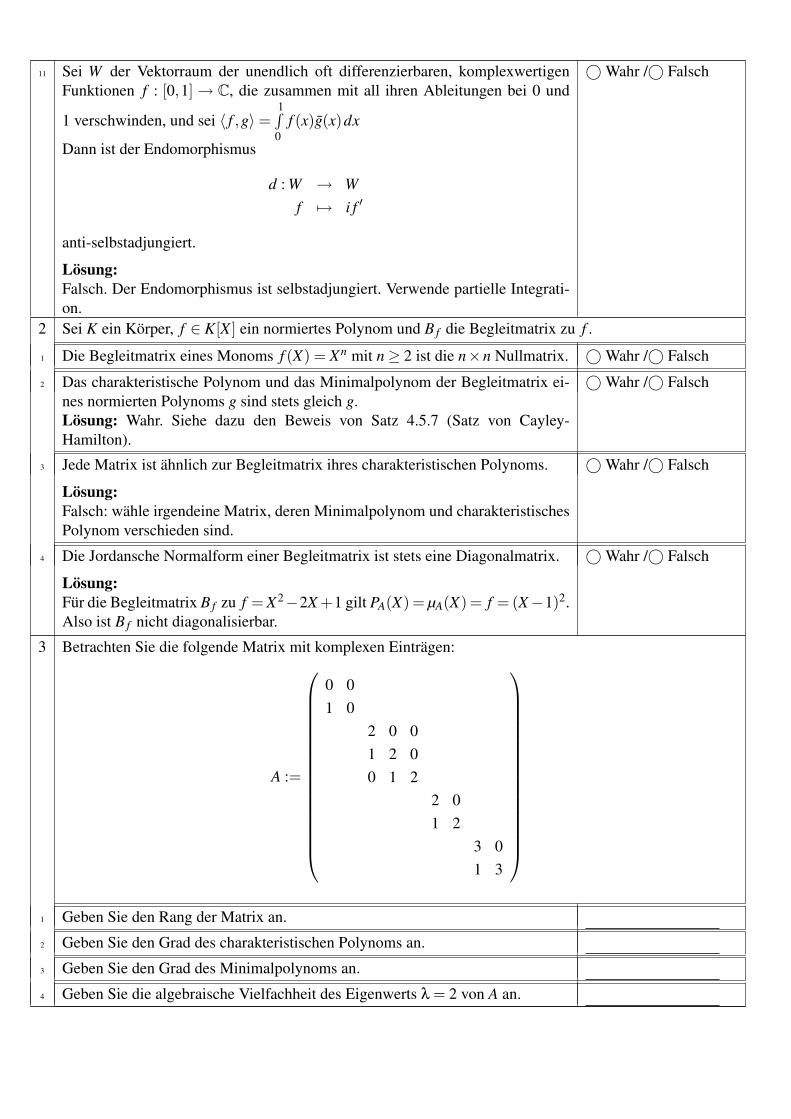
11 Sei W der Vektorraum der unendlich oft differenzierbaren, komplexwertigenFunktionen f : [0,1] → C, die zusammen mit all ihren Ableitungen bei 0 und
1 verschwinden, und sei 〈 f ,g〉=1R0
f (x)g(x)dx
Dann ist der Endomorphismus
d : W → Wf 7→ i f ′
anti-selbstadjungiert.
Losung:Falsch. Der Endomorphismus ist selbstadjungiert. Verwende partielle Integrati-on.
© Wahr /© Falsch
2 Sei K ein Korper, f ∈ K[X ] ein normiertes Polynom und B f die Begleitmatrix zu f .
1 Die Begleitmatrix eines Monoms f (X) = Xn mit n ≥ 2 ist die n×n Nullmatrix. © Wahr /© Falsch
2 Das charakteristische Polynom und das Minimalpolynom der Begleitmatrix ei-nes normierten Polynoms g sind stets gleich g.Losung: Wahr. Siehe dazu den Beweis von Satz 4.5.7 (Satz von Cayley-Hamilton).
© Wahr /© Falsch
3 Jede Matrix ist ahnlich zur Begleitmatrix ihres charakteristischen Polynoms.
Losung:Falsch: wahle irgendeine Matrix, deren Minimalpolynom und charakteristischesPolynom verschieden sind.
© Wahr /© Falsch
4 Die Jordansche Normalform einer Begleitmatrix ist stets eine Diagonalmatrix.
Losung:Fur die Begleitmatrix B f zu f = X2−2X +1 gilt PA(X) = µA(X) = f = (X−1)2.Also ist B f nicht diagonalisierbar.
© Wahr /© Falsch
3 Betrachten Sie die folgende Matrix mit komplexen Eintragen:
A :=
0 01 0
2 0 01 2 00 1 2
2 01 2
3 01 3
1 Geben Sie den Rang der Matrix an.
2 Geben Sie den Grad des charakteristischen Polynoms an.
3 Geben Sie den Grad des Minimalpolynoms an.
4 Geben Sie die algebraische Vielfachheit des Eigenwerts λ = 2 von A an.
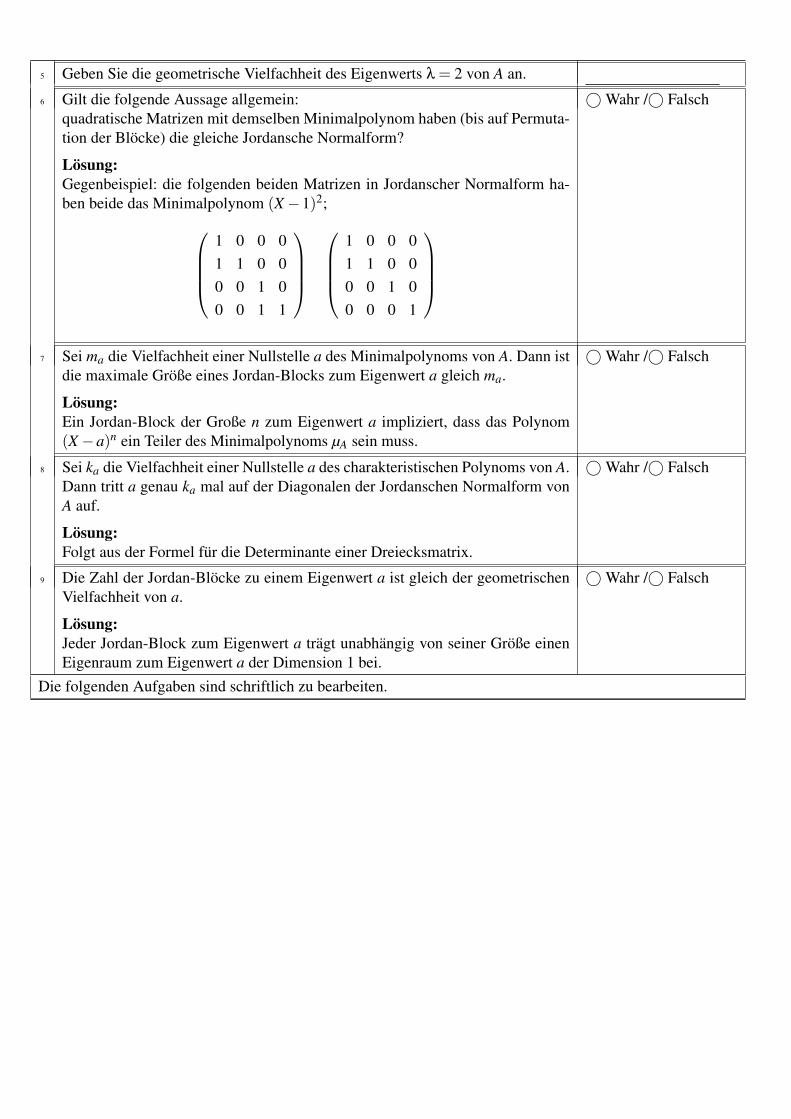
5 Geben Sie die geometrische Vielfachheit des Eigenwerts λ = 2 von A an.
6 Gilt die folgende Aussage allgemein:quadratische Matrizen mit demselben Minimalpolynom haben (bis auf Permuta-tion der Blocke) die gleiche Jordansche Normalform?
Losung:Gegenbeispiel: die folgenden beiden Matrizen in Jordanscher Normalform ha-ben beide das Minimalpolynom (X −1)2;
1 0 0 01 1 0 00 0 1 00 0 1 1
1 0 0 01 1 0 00 0 1 00 0 0 1
© Wahr /© Falsch
7 Sei ma die Vielfachheit einer Nullstelle a des Minimalpolynoms von A. Dann istdie maximale Große eines Jordan-Blocks zum Eigenwert a gleich ma.
Losung:Ein Jordan-Block der Große n zum Eigenwert a impliziert, dass das Polynom(X −a)n ein Teiler des Minimalpolynoms µA sein muss.
© Wahr /© Falsch
8 Sei ka die Vielfachheit einer Nullstelle a des charakteristischen Polynoms von A.Dann tritt a genau ka mal auf der Diagonalen der Jordanschen Normalform vonA auf.
Losung:Folgt aus der Formel fur die Determinante einer Dreiecksmatrix.
© Wahr /© Falsch
9 Die Zahl der Jordan-Blocke zu einem Eigenwert a ist gleich der geometrischenVielfachheit von a.
Losung:Jeder Jordan-Block zum Eigenwert a tragt unabhangig von seiner Große einenEigenraum zum Eigenwert a der Dimension 1 bei.
© Wahr /© Falsch
Die folgenden Aufgaben sind schriftlich zu bearbeiten.
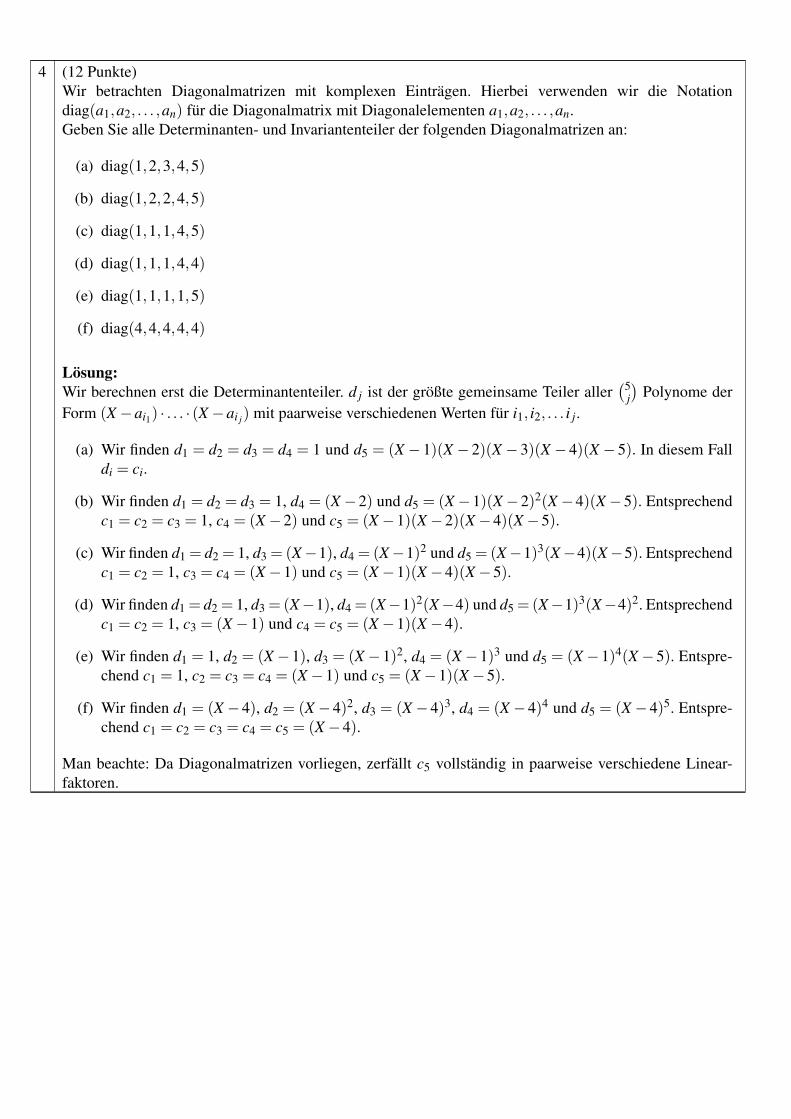
4 (12 Punkte)Wir betrachten Diagonalmatrizen mit komplexen Eintragen. Hierbei verwenden wir die Notationdiag(a1,a2, . . . ,an) fur die Diagonalmatrix mit Diagonalelementen a1,a2, . . . ,an.Geben Sie alle Determinanten- und Invariantenteiler der folgenden Diagonalmatrizen an:
(a) diag(1,2,3,4,5)
(b) diag(1,2,2,4,5)
(c) diag(1,1,1,4,5)
(d) diag(1,1,1,4,4)
(e) diag(1,1,1,1,5)
(f) diag(4,4,4,4,4)
Losung:Wir berechnen erst die Determinantenteiler. d j ist der großte gemeinsame Teiler aller
(5j
)Polynome der
Form (X −ai1) · . . . · (X −ai j) mit paarweise verschiedenen Werten fur i1, i2, . . . i j.
(a) Wir finden d1 = d2 = d3 = d4 = 1 und d5 = (X − 1)(X − 2)(X − 3)(X − 4)(X − 5). In diesem Falldi = ci.
(b) Wir finden d1 = d2 = d3 = 1, d4 = (X −2) und d5 = (X −1)(X −2)2(X −4)(X −5). Entsprechendc1 = c2 = c3 = 1, c4 = (X −2) und c5 = (X −1)(X −2)(X −4)(X −5).
(c) Wir finden d1 = d2 = 1, d3 = (X−1), d4 = (X−1)2 und d5 = (X−1)3(X−4)(X−5). Entsprechendc1 = c2 = 1, c3 = c4 = (X −1) und c5 = (X −1)(X −4)(X −5).
(d) Wir finden d1 = d2 = 1, d3 = (X−1), d4 = (X−1)2(X−4) und d5 = (X−1)3(X−4)2. Entsprechendc1 = c2 = 1, c3 = (X −1) und c4 = c5 = (X −1)(X −4).
(e) Wir finden d1 = 1, d2 = (X −1), d3 = (X −1)2, d4 = (X −1)3 und d5 = (X −1)4(X −5). Entspre-chend c1 = 1, c2 = c3 = c4 = (X −1) und c5 = (X −1)(X −5).
(f) Wir finden d1 = (X −4), d2 = (X −4)2, d3 = (X −4)3, d4 = (X −4)4 und d5 = (X −4)5. Entspre-chend c1 = c2 = c3 = c4 = c5 = (X −4).
Man beachte: Da Diagonalmatrizen vorliegen, zerfallt c5 vollstandig in paarweise verschiedene Linear-faktoren.

5 (i) (5 Punkte) Zeigen Sie: jede Matrix A ∈ M(n×n,C) ist unitar ahnlich zu einer oberen Dreiecksma-trix, d.h. es gibt eine unitare Matrix U ∈ U(n), so dass U−1AU eine obere Dreiecksmatrix ist.
(ii) (5 Punkte) Sei V ein n-dimensionaler unitarer Vektorraum und ϕ ∈ End(V ). Seien λ1,λ2, . . . ,λmdie Eigenwerte von ϕ, wobei Eigenwerte entsprechend ihrer geometrischen Vielfachheit mehrfachauftreten. Dann ist
m
∑i=1
|λi|2 ≤ tr(ϕ∗ϕ)
(iii) (5 Punkte) Zeigen Sie, dass bei der Ungleichung in (ii) Gleichheit genau dann gilt, wenn ϕ∗ ◦ϕ =ϕ ◦ϕ∗ gilt. Einen Endomorphismus eines unitaren Vektorraums mit dieser Eigenschaft nennt manauch normal.
Losung:i) Man muss nur den Beweis von Satz 4.4.6 der Vorlesung geeignet anpassen. Statt, wie dort, einen Ei-genvektor zu einer beliebigen Basis zu erganzen, erganzt man zu einer Orthonormalbasis. Dann ist derBasiswechsel durch eine unitare Matrix gegeben.
ii)Sei M(ϕ) eine Matrixdarstellung von ϕ in einer Orthonormalbasis. In dieser Basis ist dann M(ϕ∗) =(M(ϕ))∗, gemaß den Regeln der Matrixmultiplikation folgt, dass
tr(ϕ∗ϕ) = ∑j,k|M(ϕ) jk|2
eine Summe nicht-negativer Terme ist.Nach (i) gibt es eine Orthonormalbasis von V , in der M(ϕ) eine obere Dreiecksmatrix ist. Bei oberenDreiecksmatrizen stehen die Eigenwerte entsprechend ihren algebraischen Vielfachheiten auf der Diago-nalen. Sie treten also mindestens gemaß ihrer geometrischen Vielfachheit als Diagonalelemente auf. Wirbezeichnen daher mit ik ∈ {1, . . .n} einen Index, fur den gilt M(ϕ)ikik = λk. Dann ist
∑j,k|M(ϕ) jk|2 =
m
∑j=1
|λ j|2 + ∑j<k
|M(ϕ) jk|2 + ∑j 6∈{i1...in}
|M(ϕ) j j|2 ≥n
∑j=1
|λ j|2
iii)Nach obigem Argument gilt Gleichheit genau dann, wenn alle Außerdiagonalelemente verschwinden, alsogenau dann, wenn M(ϕ) nur Eintrage auf der Diagonalen hat. Nach (i) ist dies gleichbedeutend damit, dasses eine Orthonormalbasis von V aus Eigenvektoren von ϕ gibt. Mit anderen Worten: genau fur Gleichheitist ϕ unitar diagonalisierbar: es gibt eine Orthonormalbasis aus Eigenvektoren.Wir zeigen nun, dass ϕ genau dann normal ist, wenn ϕ unitar diagonalisierbar ist. Sei ϕ unitar diagonali-sierbar. Dann hat die darstellende Matrix von ϕ in der Basis aus Eigenvektoren Diagonalgestalt: M(ϕ) = D.Da diese Basis eine Orthonormalbasis ist, ist M(ϕ∗) = (M(ϕ))∗ = D∗ eine Diagonalmatrix. Also sind ϕ
und ϕ∗ simultan diagonalisierbar und kommutieren nach Satz 4.3.7. Somit ist ϕ normal.Umgekehrt gelte ϕ∗ ◦ϕ = ϕ◦ϕ∗. Betrachte
ψ1 := ϕ+ϕ∗
ψ2 := i(ϕ−ϕ∗)
Offenbar sind ψ1,ψ2 selbstadjungiert, also nach Satz 5.7.9. unitar diagonalisierbar. Weil ϕ und ϕ∗ kom-mutieren, kommutieren auch ψ1,ψ2, sind also nach Satz 4.3.7 sogar gleichzeitig diagonalisierbar. Wegen
V =Mλ,µ
Eig(ψ1,λ)∩Eig(ψ2,µ)
kann die Basis, in der ψ1 und ψ2 gemeinsam Diagonalgestalt haben, sogar als Orthonormalbasis gewahltwerden. In dieser Basis sind aber auch ϕ = 1
2(ψ1− iψ2) und ϕ∗ = 12(ψ1 + iψ2) von Diagonalgestalt.

6 (10 Punkte)Sei K ein Korper und A ∈ M(n×n,K) eine beliebige Matrix.Zeigen Sie: Die Matrizen A und At sind ahnlich.Hinweis: Zeigen Sie, dass A und At die gleichen Determinantenteiler haben.
Losung:Wir zeigen, dass A und At die gleichen Determinantenteiler haben. Nach Satz 6.2.6 sind dann A und At
ahnlich.Auch die charakteristischen Matrizen von A und At sind zueinander transponiert: MAt (X) = (MA(X))t .Dann ist auch die Untermatrix j-ter Ordnung von MAt (X), die aus den Elementen besteht, die in der i1-ten, i2-ten . . . i j-ten Zeile und der k1-ten, k2-ten . . . k j-ten Spalte von MAt (X) stehen, transponiert zu derUntermatrix j-ter Ordnung von MA(X), die aus den Elementen besteht, die in der i1-ten, i2-ten . . . i j-tenSpalte und der k1-ten, k2-ten . . . k j-ten Zeile von MA(X) stehen. Die Determinanten dieser beiden Matrizensind also gleich. Da der Determinantenteiler als großter gemeinsamer Teiler dieses ubereinstimmendenSatzes von Polynomen bestimmt wird, folgt d( j)
A = d( j)At .

7 Sei (V,〈·, ·〉) ein endlich-dimensionaler euklidischer Vektorraum mit Norm ‖v‖ =√〈v,v〉 und Abstands-
funktion d(x,y) := ‖x−y‖. Sei H ein echter affiner Unterraum von V und p ein Punkt, der nicht in H liegt,p ∈V \H.
(i) (5 Punkte) Zeigen Sie, dass es genau einen Punkt qmin ∈ H gibt, fur den das Minimum d :=minq∈H d(p,q) angenommen wird.
(ii) (5 Punkte) Beschreiben Sie in Worten die Lage des Vektors p− qmin bezuglich des affinen Unter-raums H.
(iii) (10 Punkte; wenn Sie die Aufgabe fur V = R bearbeiten erhalten Sie nur maximal 5 Punkte)Es seien N Paare (xi,yi) mit xi,yi ∈V gegeben. Sie konnen sich dies folgendermaßen vorstellen: inAbhangigkeit von n := dimRV Parametern xi messen Sie in N Messungen jeweils n Großen yi.
Sie vermuten einen affinen Zusammenhang zwischen diesen Großen, also eine Relation der Form
y = a+bx
mit a ∈V und b ∈R. Wir suchen nun Werte fur a,b die moglichst gut mit den “Messwerten” (xi,yi)vertraglich sind in dem Sinne, dass die Funktion
f (a,b) =N
∑i=1
d (yi,(a+bxi))2
minimal wird.
Wir fuhren noch die arithmetischen Mittel ein:
x :=1N
N
∑i=1
xi ∈V y :=1N
N
∑i=1
yi ∈V .
Zeigen Sie, dass dann die gesuchten Werte von a,b die Gleichung y = a+bx erfullen.Zeigen Sie dann, fur diese Werte gilt:
b =1N ∑
Ni=1〈xi− x,yi− y〉
1N ∑
Ni=1 ‖xi− x‖2
.

8 Losung zur vorherigen Aufgabe:
(i) Sei q ∈ H und H = q +U0. Wir wahlen eine Orthonormalbasis (b1, . . . ,br) des UntervektorraumsU0, die wir zu einer Orthonormalbasis (b1, . . . ,bn) von V fortsetzen. Dann schreibt sich jeder Punktin H als v = q+∑
ri=1 λibi mit eindeutig bestimmten λi ∈ R. Es ist
d(p,v)2 = ‖p−q−r
∑i=1
λibi‖2 =r
∑i=1
(λ2i −2λi〈bi, p−q〉)+‖p−q‖2
eine quadratische Funktion in den Variablen λi mit i = 1, . . . ,r mit Minimum fur λi = 〈bi, p− q〉,also bei
qmin = q+r
∑i=1
(〈bi, p〉−〈bi,q〉)bi = p+n
∑i=r+1
〈q− p,bi〉bi ,
da fur jedes v ∈V gilt v = ∑ni=1〈v,bi〉bi.
(ii) Offenbar ist qmin − p eine Linearkombination der Basisvektoren br+1, . . . ,bn und steht daher aufdem Untervektorraum U0 senkrecht. Der Abstand eines Punktes p zum affinen Unterraum wird alsogenau fur den Punkt qmin der affinen Unterraums minimiert, fur den der Verbindungsvektor zu psenkrecht auf dem affinen Unterraum steht.
(iii) Der Gradient nach a liefert die Gleichung
grada( f ) =−2N
∑i=1
yi−a−bxi = 0 ,
aus der nach Division durch 2N die Gleichung y = a + bx folgt. Die Ableitung nach b liefert nachEinsetzen von a = y−bx die Gleichung
∂
∂bf (a,b) =−2
N
∑i=1
〈yi− y+bx−bxi,xi〉= 0 .
Die angegebene Gleichung folgt, wenn man beachtet, dass
N
∑i=1
〈xi− x,x〉= N〈x,x〉−N〈x,x〉= 0
undN
∑i=1
〈yi− y,x〉= N〈y,x〉−N〈y,x〉= 0
gilt.
Den Abgabeschluß der multiple choice Aufgaben sehen Sie oben auf dem Blatt. Die schriftlichen Aufgabenwerden in der Ubungsgruppe am Montag, dem 7. Juli, abgegeben.
Ex 1, Qu 1, Var 1: [’Wahr’]Ex 1, Qu 2, Var 1: [’Falsch’]Ex 1, Qu 3, Var 1: [’Falsch’]Ex 1, Qu 3, Var 2: [’Wahr’]Ex 1, Qu 4, Var 1: [’Wahr’]Ex 1, Qu 5, Var 1: [’Wahr’]Ex 1, Qu 6, Var 1: [’Wahr’]Ex 1, Qu 7, Var 1: [’Wahr’]Ex 1, Qu 8, Var 1: [’Falsch’]Ex 1, Qu 9, Var 1: [’Wahr’]Ex 1, Qu 10, Var 1: [’Wahr’]Ex 1, Qu 11, Var 1: [’Falsch’]
Ex 2, Qu 1, Var 1: [’Falsch’]Ex 2, Qu 2, Var 1: [’Wahr’]Ex 2, Qu 3, Var 1: [’Falsch’]Ex 2, Qu 4, Var 1: [’Falsch’]
Ex 3, Qu 1, Var 1: [’8’]Ex 3, Qu 2, Var 1: [’9’]Ex 3, Qu 3, Var 1: [’7’]Ex 3, Qu 4, Var 1: [’5’]Ex 3, Qu 5, Var 1: [’2’]Ex 3, Qu 6, Var 1: [’Falsch’]Ex 3, Qu 7, Var 1: [’Wahr’]Ex 3, Qu 8, Var 1: [’Wahr’]Ex 3, Qu 9, Var 1: [’Wahr’]
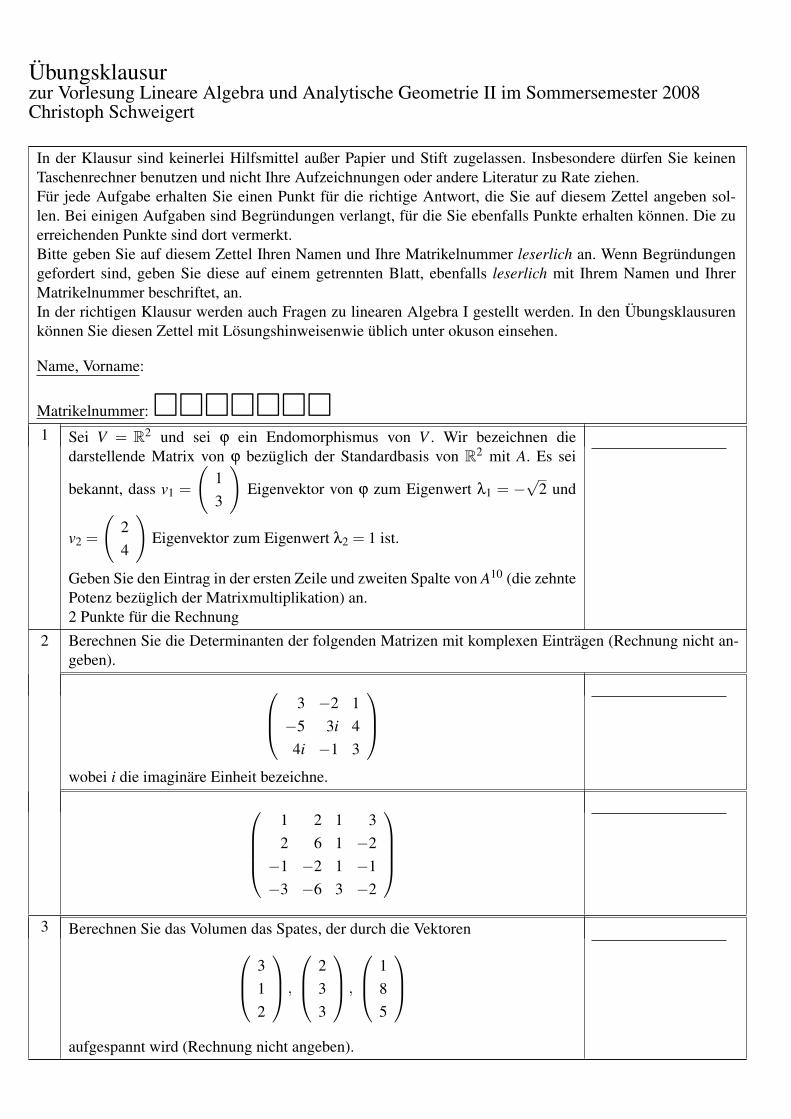
Ubungsklausurzur Vorlesung Lineare Algebra und Analytische Geometrie II im Sommersemester 2008Christoph Schweigert
In der Klausur sind keinerlei Hilfsmittel außer Papier und Stift zugelassen. Insbesondere durfen Sie keinenTaschenrechner benutzen und nicht Ihre Aufzeichnungen oder andere Literatur zu Rate ziehen.Fur jede Aufgabe erhalten Sie einen Punkt fur die richtige Antwort, die Sie auf diesem Zettel angeben sol-len. Bei einigen Aufgaben sind Begrundungen verlangt, fur die Sie ebenfalls Punkte erhalten konnen. Die zuerreichenden Punkte sind dort vermerkt.Bitte geben Sie auf diesem Zettel Ihren Namen und Ihre Matrikelnummer leserlich an. Wenn Begrundungengefordert sind, geben Sie diese auf einem getrennten Blatt, ebenfalls leserlich mit Ihrem Namen und IhrerMatrikelnummer beschriftet, an.In der richtigen Klausur werden auch Fragen zu linearen Algebra I gestellt werden. In den Ubungsklausurenkonnen Sie diesen Zettel mit Losungshinweisenwie ublich unter okuson einsehen.
Name, Vorname:
Matrikelnummer: �������1 Sei V = R2 und sei ϕ ein Endomorphismus von V . Wir bezeichnen die
darstellende Matrix von ϕ bezuglich der Standardbasis von R2 mit A. Es sei
bekannt, dass v1 =
(13
)Eigenvektor von ϕ zum Eigenwert λ1 = −
√2 und
v2 =
(24
)Eigenvektor zum Eigenwert λ2 = 1 ist.
Geben Sie den Eintrag in der ersten Zeile und zweiten Spalte von A10 (die zehntePotenz bezuglich der Matrixmultiplikation) an.2 Punkte fur die Rechnung
2 Berechnen Sie die Determinanten der folgenden Matrizen mit komplexen Eintragen (Rechnung nicht an-geben). 3 −2 1
−5 3i 44i −1 3
wobei i die imaginare Einheit bezeichne.
1 2 1 32 6 1 −2−1 −2 1 −1−3 −6 3 −2
3 Berechnen Sie das Volumen das Spates, der durch die Vektoren 3
12
,
233
,
185
aufgespannt wird (Rechnung nicht angeben).
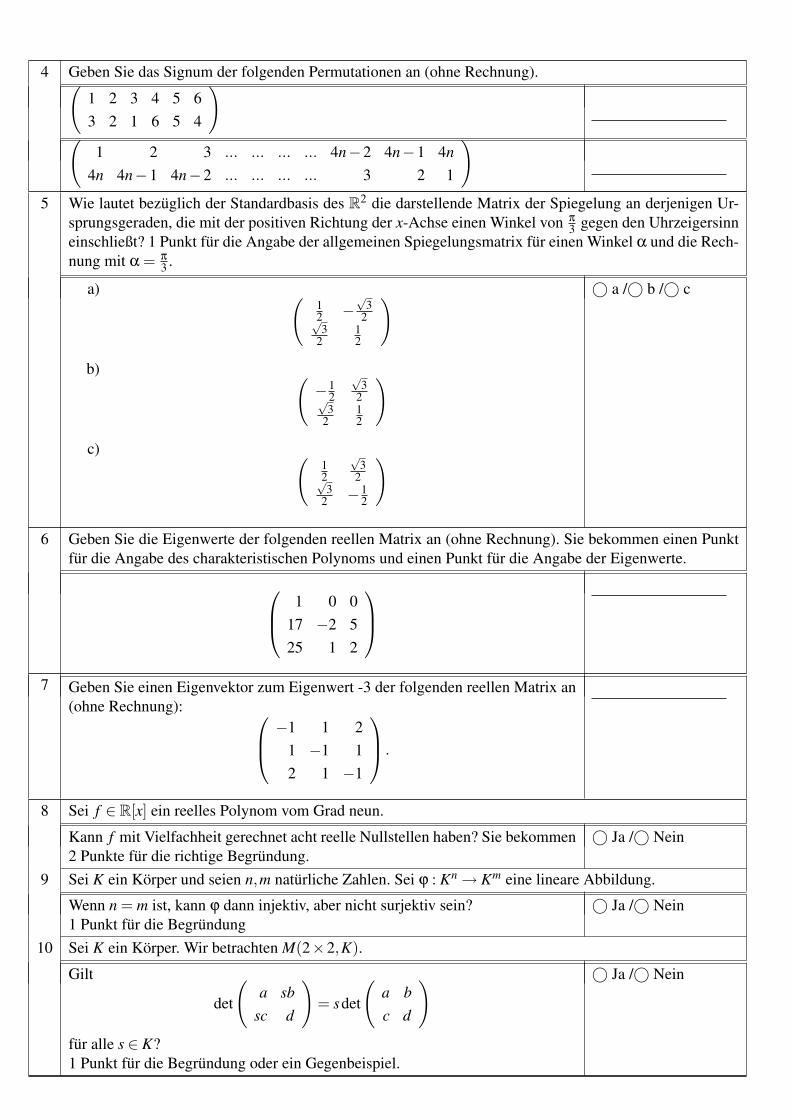
4 Geben Sie das Signum der folgenden Permutationen an (ohne Rechnung).(1 2 3 4 5 63 2 1 6 5 4
)(
1 2 3 ... ... ... ... 4n−2 4n−1 4n4n 4n−1 4n−2 ... ... ... ... 3 2 1
)5 Wie lautet bezuglich der Standardbasis des R2 die darstellende Matrix der Spiegelung an derjenigen Ur-
sprungsgeraden, die mit der positiven Richtung der x-Achse einen Winkel von π
3 gegen den Uhrzeigersinneinschließt? 1 Punkt fur die Angabe der allgemeinen Spiegelungsmatrix fur einen Winkel α und die Rech-nung mit α = π
3 .
a) (12 −
√3
2√3
212
)
b) (−1
2
√3
2√3
212
)
c) (12
√3
2√3
2 −12
)
© a /© b /© c
6 Geben Sie die Eigenwerte der folgenden reellen Matrix an (ohne Rechnung). Sie bekommen einen Punktfur die Angabe des charakteristischen Polynoms und einen Punkt fur die Angabe der Eigenwerte. 1 0 0
17 −2 525 1 2
7 Geben Sie einen Eigenvektor zum Eigenwert -3 der folgenden reellen Matrix an
(ohne Rechnung): −1 1 21 −1 12 1 −1
.
8 Sei f ∈ R[x] ein reelles Polynom vom Grad neun.
Kann f mit Vielfachheit gerechnet acht reelle Nullstellen haben? Sie bekommen2 Punkte fur die richtige Begrundung.
© Ja /© Nein
9 Sei K ein Korper und seien n,m naturliche Zahlen. Sei ϕ : Kn → Km eine lineare Abbildung.
Wenn n = m ist, kann ϕ dann injektiv, aber nicht surjektiv sein?1 Punkt fur die Begrundung
© Ja /© Nein
10 Sei K ein Korper. Wir betrachten M(2×2,K).
Gilt
det
(a sb
sc d
)= sdet
(a bc d
)fur alle s ∈ K?1 Punkt fur die Begrundung oder ein Gegenbeispiel.
© Ja /© Nein
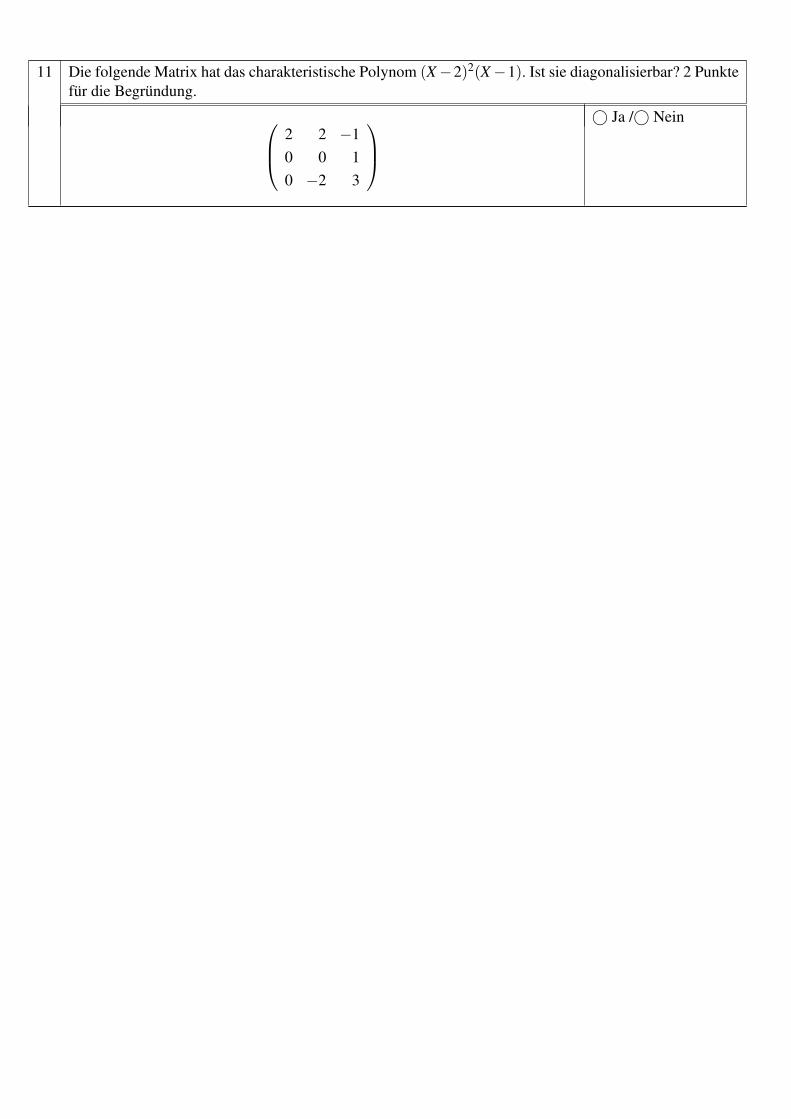
11 Die folgende Matrix hat das charakteristische Polynom (X−2)2(X−1). Ist sie diagonalisierbar? 2 Punktefur die Begrundung. 2 2 −1
0 0 10 −2 3
© Ja /© Nein
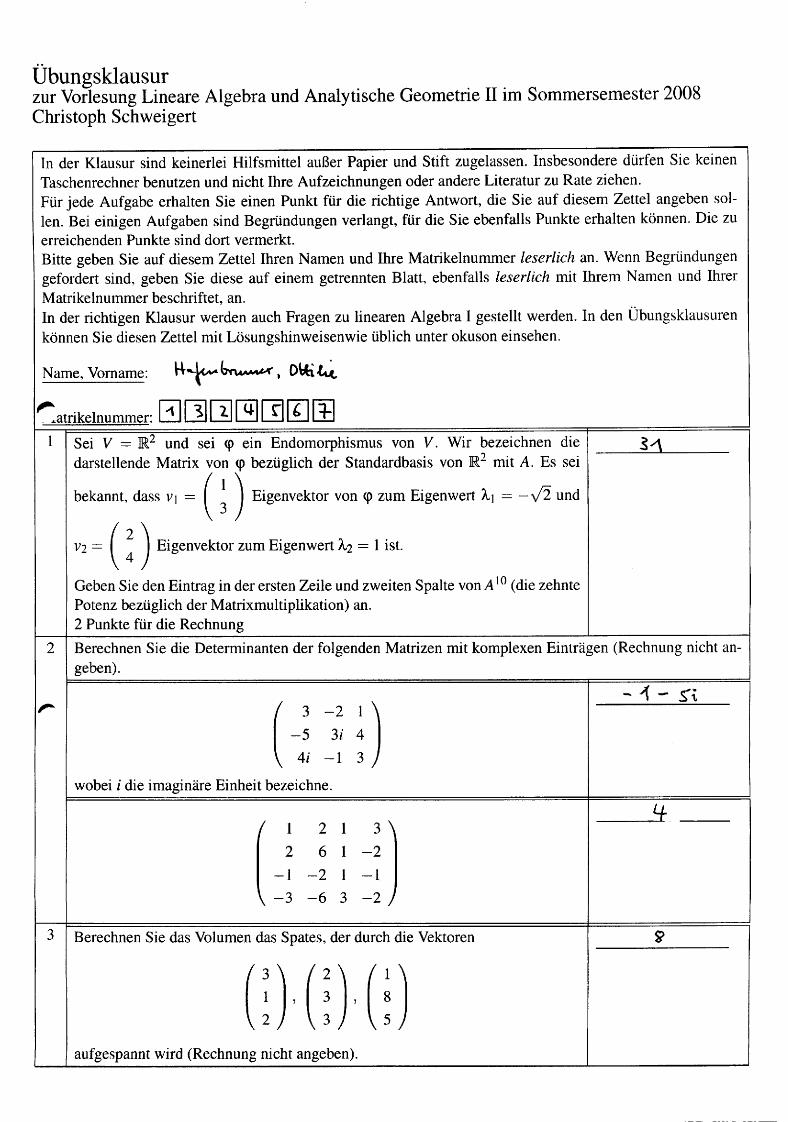
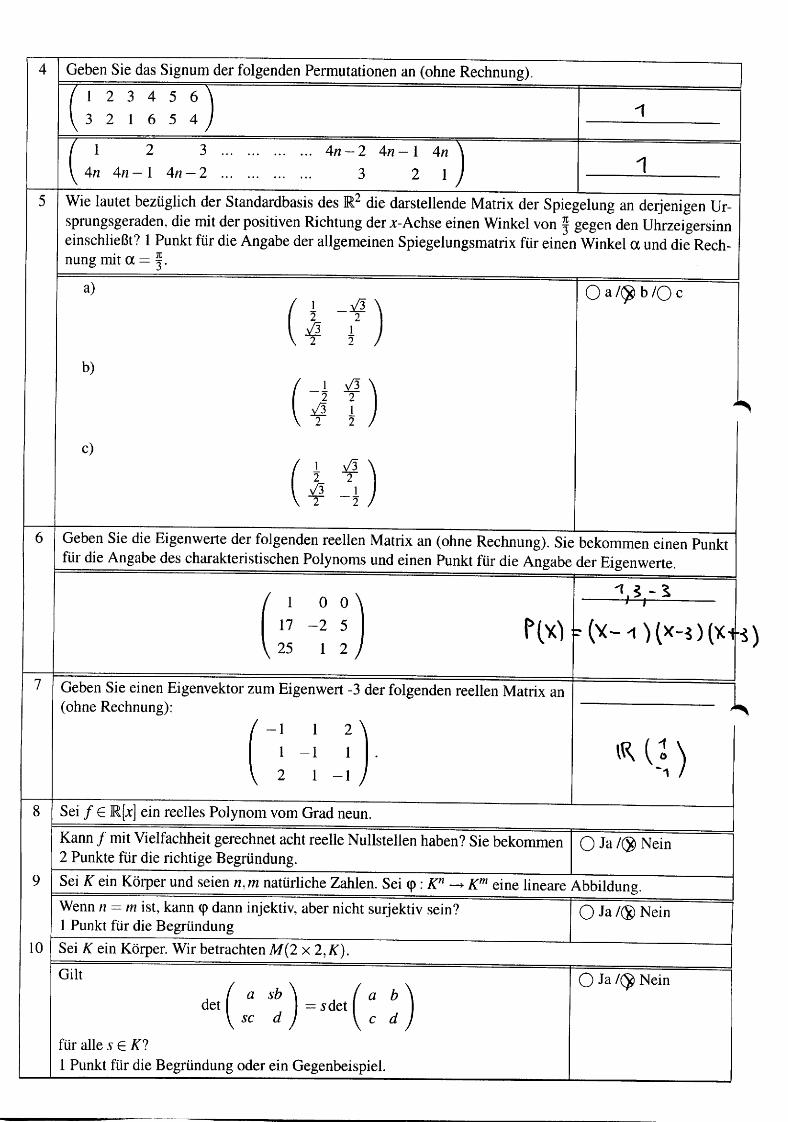
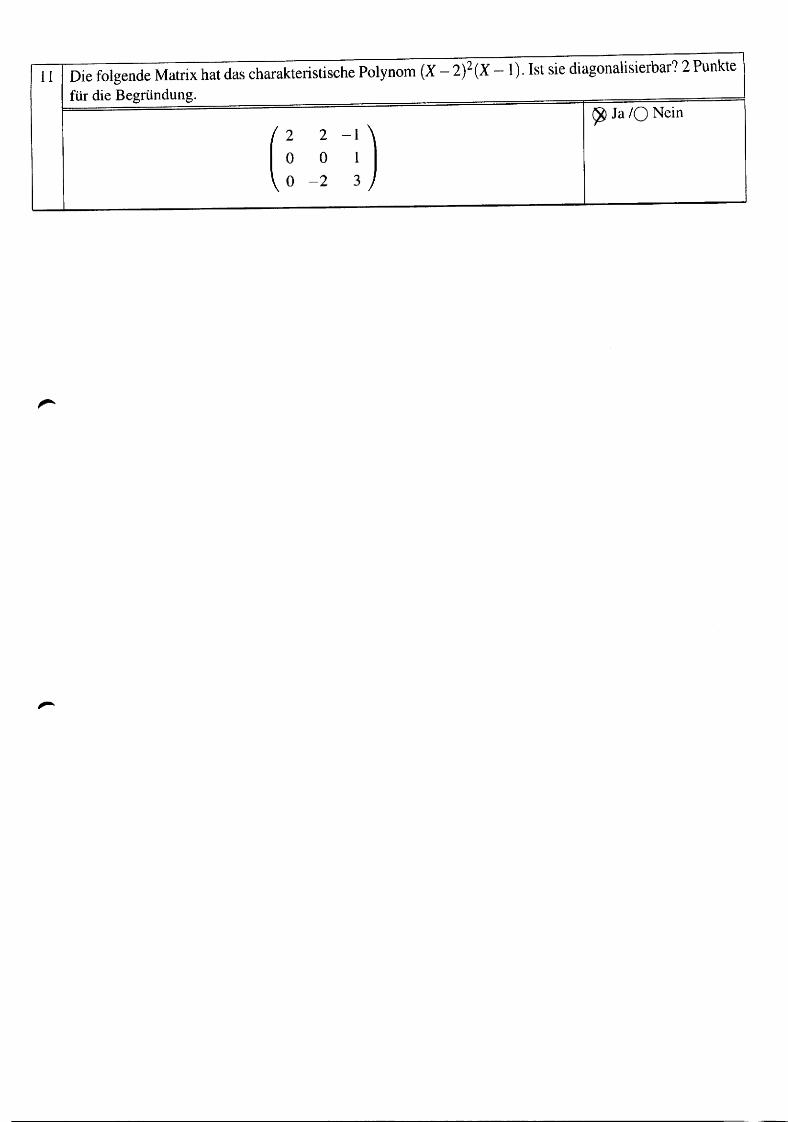
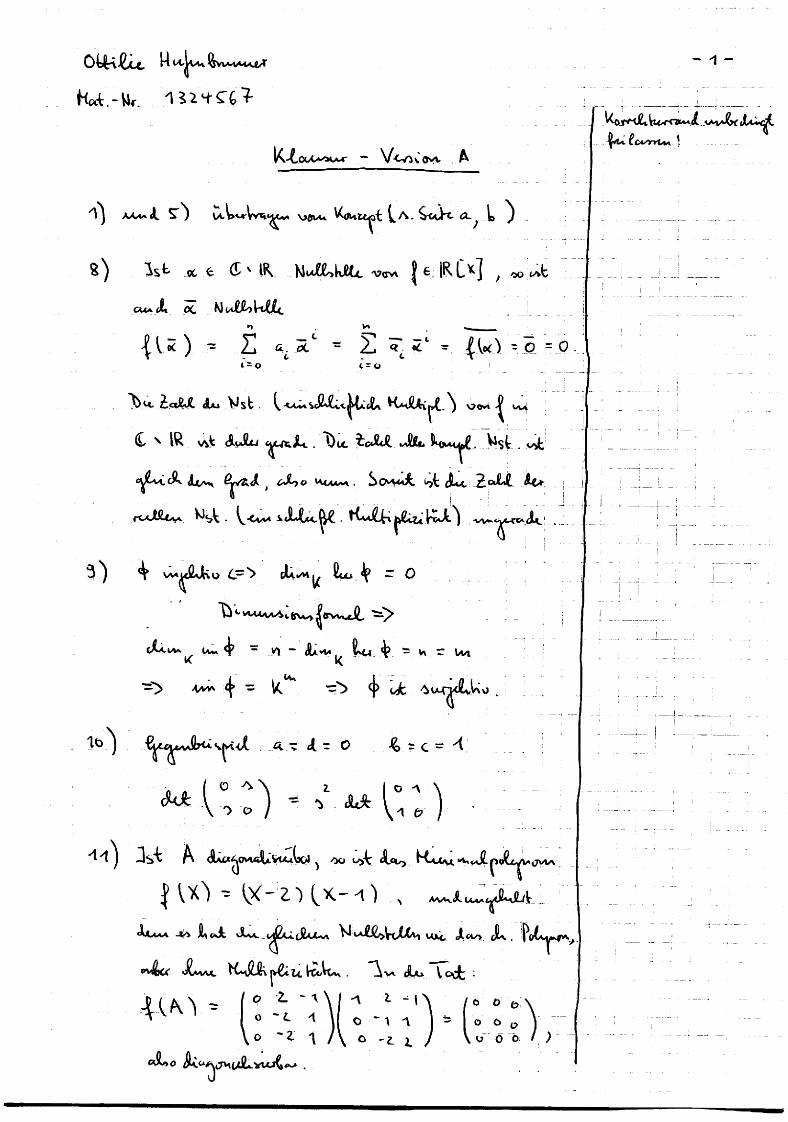
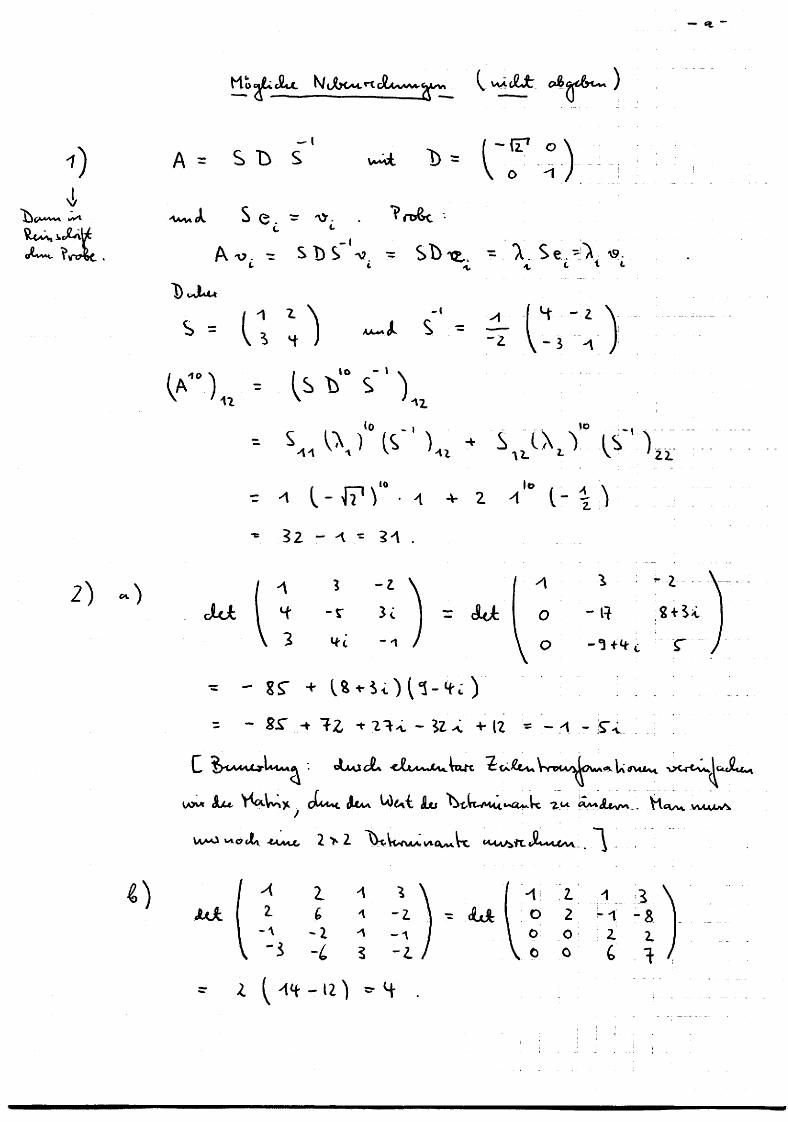
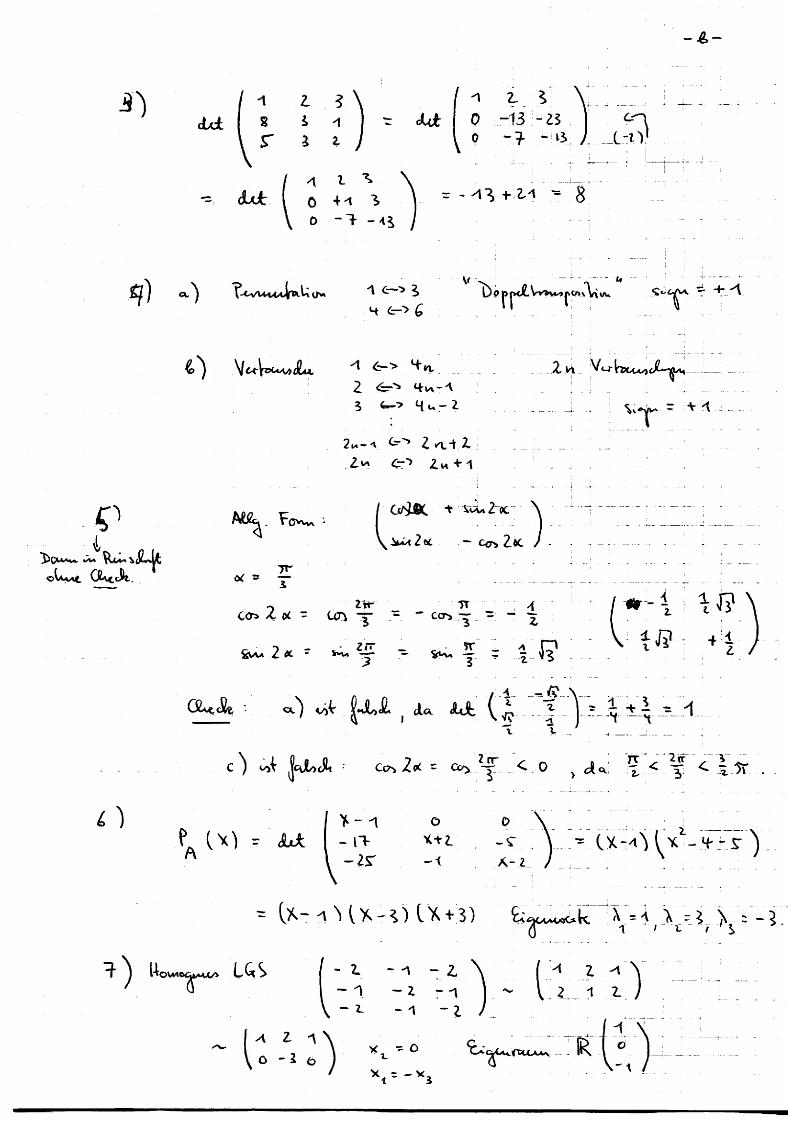

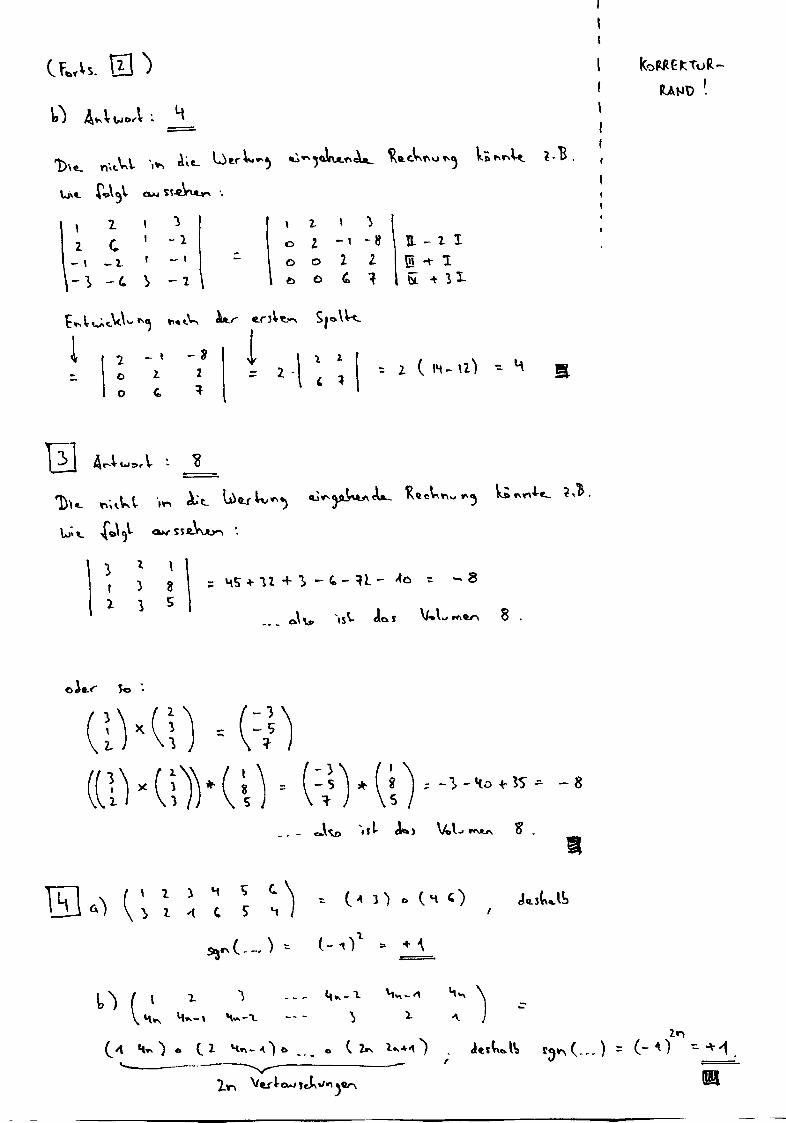

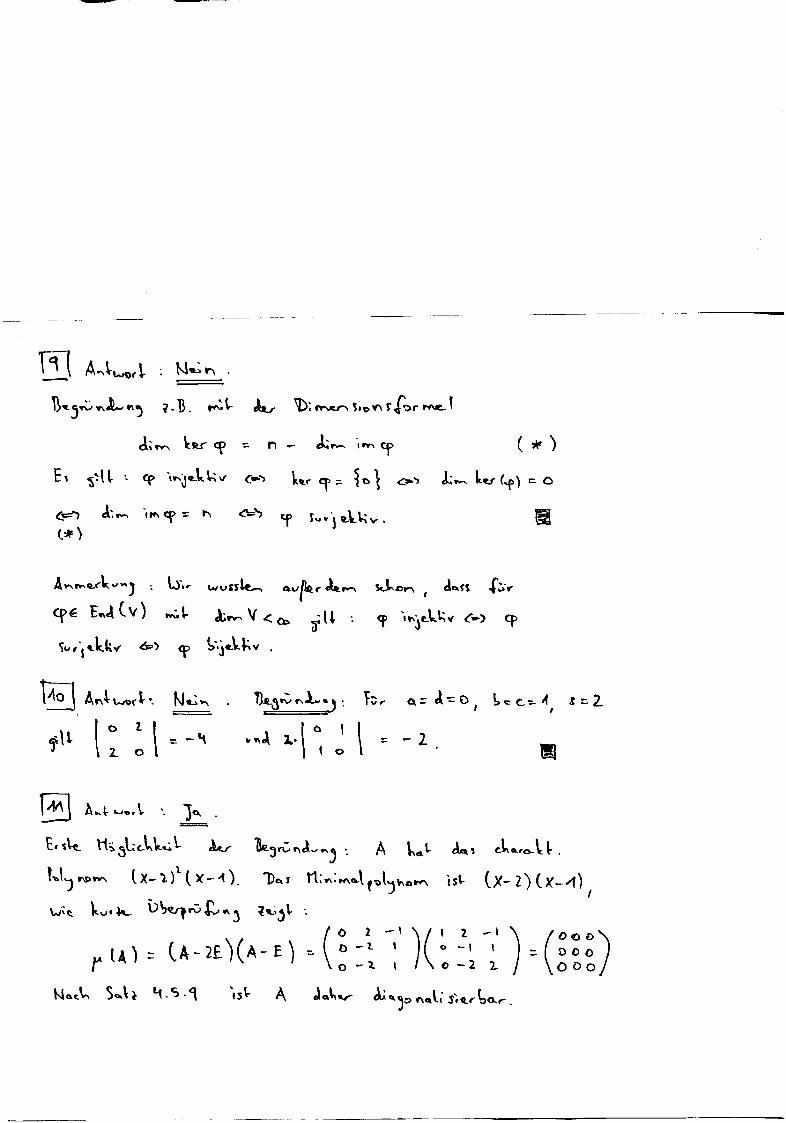






![Lineare Algebra I Bernd Ammann, WS 2007/08 · ... Lineare Algebra und Analytische Geometrie [8] Falko Lorenz, Lineare Algebra I und II [9] Serge Lang, Linear Algebra, Second Edition,](https://img.pdfslide.tips/doc/110x75/5c66806a09d3f252168c7903/lineare-algebra-i-bernd-ammann-ws-200708-lineare-algebra-und-analytische.jpg)






















