Robot Sensor Networks
HanyangUniversity
Architecture of Sensor Network
Sensor Network Hardware & Software Platform
CASP Lab. Platform 소개
다양한 Hardware Platform 소개
Robot Sensor Networks
HanyangUniversity
Contents
1. Overview of Hardware Platform
2. Sensor Node H/W‐S/W Platforms
3. Sensor Network Platform
4. CASP Lab. Hardware Platform 소개
5. 다양한 Hardware Platform 소개

Robot Sensor Networks
HanyangUniversity
Overview of Hardware Platform
8‐bit micro‐controller devices
Zigbee/802.15.4 radios
TinyOS, SOS, Contiki
8‐bit micro‐controller devices
Zigbee/802.15.4 radios
TinyOS, SOS, Contiki
32‐bit embedded processors
Zigbee/802.15.4 + 802.11 radios
Linux
32‐bit embedded processors
Zigbee/802.15.4 + 802.11 radios
Linux
Tmote Invent
MicaZ OEM
GumStix
Stargate
Robot Sensor Networks
HanyangUniversity
Architecture and Application
1. Architecture has limited physical parallelism or a controller hierarchy
Peripherals have a very primitive interface to the processor
Unlike PC architectures where the graphics accelerator has more MIPS than
micro‐processor !
Processor performs computation, resource management and IO
2. Sensor network applications are concurrency intensive
Forward radio packets while sampling sensor data
3. How does one handle all this on a 8 MHz microcontroller ?
Make use of the interrupts and on‐chip peripherals
Exploit the parallelism of the microcontroller to the extent possible
Sensor Node Architecture and Application Characteristics

Robot Sensor Networks
HanyangUniversity
Typical Node Hardware
Low PowerEmbeddedProcessor
Radio Transceiver
Memory
Sensors
Battery
8‐bit, 10 MHzSlow Computations
1Kbps ‐ 1Mbps, 3‐100 Meters,
Lossy Transmissions128KB‐1MB
Limited Storage
Expensive ‐‐Requires Supervision
Limited Lifetime
Robot Sensor Networks
HanyangUniversity
MICA2 (Berkeley)
Control Board (USU)
AVR ATmega128 (CPU)
CC1000 (Comm.)
2 Encoders2 Encoders
Paper Detector(Optional)(QRB1134)
Paper Detector(Optional)(QRB1134)
3 IR (Sharp GP2D12)
3 IR (Sharp GP2D12)
Photo ResistorPhoto Resistor
2 Servos2 Servos
Sensors
3V Power3V Power
6V Power6V Power
2 PW
2 PWM
2 ADC
3 ADC
2 ADC
Hardware Configuration
Hardware Configuration of the Mobility Platform

Robot Sensor Networks
HanyangUniversity
Components of a sensor node
Location Finding System Mobilizer
Processor
StorageTransceiverADCSensor
Sensor Unit
Processing Unit
Powergenerator
Power Unit
A more detailed view
Robot Sensor Networks
HanyangUniversity
Architecture Components
Requirements:
1. Small physical size: 1 mm3
2. Low Power Consumption: ~50‐100 uW average power
3. Resource Constrained: 8 MHz, 4 Kb RAM
PROCESSINGSUB‐SYSTEM
COMMUNICATIONSUB‐SYSTEM
SENSINGSUB‐SYSTEM
POWER MGMT.SUB‐SYSTEM
ACTUATIONSUB‐SYSTEM

Robot Sensor Networks
HanyangUniversity
Processing Sub‐System
Large number of8 ‐ bit registers
Multiple
PeripheralsHarvard Arch.
Atmel AVR ATMEGA128L
RISC Architecture
8 bit ALU/data‐path
128 Kb FLASH ‐ Code
4 Kb SRAM ‐ Data Details are available in the ATMEGA128L Datasheet
Robot Sensor Networks
HanyangUniversity
Polling vs. Interrupts
POLLING
void main(){
while !(timer_overflow){};
read_sensor_value();
}
INTERRUPT DRIVEN
void main(){
call_on_timer_overflow(Timer_overflow_ISR);
Do some useful stuff …..
}
void Timer_overflow_ISR(){
read_sensor_value();
}
When is polling really useful ?
What is the CPU cost of an interrupt/context switch ?
What happens when interrupts are really frequent ?

Robot Sensor Networks
HanyangUniversity
AVR Peripherals
BIT BANGED SERIAL IO
void main(){
for (i = 0; i < 8; i++)
out_pin = (dataout >> i) & 0x01;
}
UART SERIAL IO
void main(){
set_up_uart();
uart_put_byte(dataout);
// Do useful stuff
// UART HW working in parallel !
}
1. UART
Serial communication with the PC
2. SPI – Serial Peripheral Interface
Synchronous serial communication
Interface to Radio in the Mote
3. ADC
Analog – Digital Converter
Digitizing sensor readings
4. I/O Ports
General Purpose Input Output pins
(GPIO)
Used to light up LEDs in Mote
Robot Sensor Networks
HanyangUniversity
Interrupt Handling
1. Micro‐controllers have a single stack memory model
2. Interrupt is any condition signaled by hardware e.g. Timer Timeout
3. Step‐by‐step Interrupt Handling
Interrupt condition signaled by hardware
Processor finishes execution of current instruction
Processor pushes address of next instruction into the stack
Processor fetches instruction from Interrupt Vector Table
1) Table is stored in program memory
2) Usually filled by C compiler (Can also be done manually !)
3) Instruction in table is “jmp <service_routine>”
Processor jumps into interrupt service routine (ISR) and executes
1) Current context is stored onto stack (i.e. Push all used registers)
Questions:
What happens if another interrupt appears within an ISR ?
Can we have a pre‐emptive multi‐tasking with single stack ? How ?

Robot Sensor Networks
HanyangUniversity
AVR Timers
Timer2
Timer08 ‐ bit
Timer1
Timer3
16 ‐ bit
1. Multiple Timers
2. Multiple Clock Sources
CPU Clk
Real Time Clk – 32 KHz
Pre‐scaled Clk from above sources
3. Multiple Interrupts
Timer Overflow
Output Compare
4. Functions
Periodic sampling pulses
Waveform generation
Robot Sensor Networks
HanyangUniversity
AVR Power Management
1. Low Power operation – 15 mW @ 4 MHz
2. Multiple Sleep Modes
Sleep Modes: Shutdown unused components
Idle Mode – 6 mW
1) CPU OFF, all peripherals ON
2) CPU “woken up” by interrupts
Power Down Mode – 75 uW
1) CPU and most peripherals OFF
2) External Interrupts, 2 Wire Interface, Watchdog ON
Power Save Mode – 120 uW
1) Similar to Power Down
2) Timer0 continues to run “asynchronously”

Robot Sensor Networks
HanyangUniversity
Protocol Stack Implementation
1. Protocol Stack Layers
Modulation – Demodulation
Base‐band Processing
Medium Access Control
2. Protocol stack implementation depends upon radio technology
3. RFM Radio
Modulation ‐ Demodulation only
Processor handles bit‐level synchronization and rest
4. Chipcon CC1000
Modulation ‐ Demodulation and bit‐level synchronization
Processor handles start‐symbol detection and rest
5. Chipcon CC2420
Performs complete packet reception and raises interrupt
Processor handles MAC
Robot Sensor Networks
HanyangUniversity
Mica ‐ RFM AVR Interface
Data Interface
1. Periodic waveform generated by Timer0
2. Waveform fed as clk to SPI unit
3. SPI samples Data I/O line periodically during Rx
4. SPI shifts out data during Tx
5. Radio only performs modulation‐demodulation
Control Interface
GPIO Pins of AVR
Two Control lines decide Radio state
SPI
Timer0
SPI CLK
RFMRADIO
Data I/O
CTL0
CTL1

Robot Sensor Networks
HanyangUniversity
Mica2 – CC1000 AVR Interface
Control Interface
GPIO Pins of AVR
Simulate SPI in S/W
PCLK: Program Clock
PDATA: Program Data
PALE: R/W Select
Radio state written to registers in radio
Data Interface
1. SPI CLK generated by radio
2. Radio Rx data available as a bit‐stream
3. Radio performs channel encoding‐decoding and bit‐synchronization
SPI
CHIPCONCC1000RADIO
Data I/O
DCLK
PCLKPDATAPALE
Robot Sensor Networks
HanyangUniversity
MicaZ – CC2420 Interface
SPI
CHIPCONCC2420RADIO
MISOSCLK
GIO0FIFO
SSD
MOSI
CSn
FIFOPCCA
GIO1
Interrupt
Timer Capture
GIO2
Data Interface
1. SPI CLK generated by uC
2. Radio Rx data available as a byte‐stream of packets
3. Radio performs channel encoding‐decoding, bit‐synchronization,
encryption and packetization
Control Interface
SPI access to radio internal registers

Robot Sensor Networks
HanyangUniversity
Radio Power Management
1. Radio has very high power consumption
Tx power is range dependant – 52.2 mW (0 dBm)
Rx power is also very high – 59.1 mW (more than Tx !!)
Power‐down VReg Off ‐ 3 uW
Above data for CC2420, 2.4 GHz
1) Check out CC1000, CC2420 data‐sheets
2. Radio power management critical
Idle state channel monitoring power = Rx Power
Put radio to sleep when not in use
How do we know when somebody is trying to contact us ?
1) Low Power Listening
2) STEM Protocol
Robot Sensor Networks
HanyangUniversity
Sensor Node H/W‐S/W Platforms (1/2)
Event detectionWireless communication with neighboring nodes
In-node processing
sensors CPU radio
battery
Acoustic, seismic, image, magnetic,
etc. interface
Electro-magnetic interface
Limited battery supply
Energy efficiency is the crucial H/W and S/W design criterion

Robot Sensor Networks
HanyangUniversity
Actuating Sensing Communication
Application (User Components)
Main (includes Scheduler)
Hardware Abstractions
Sensor Node H/W‐S/W Platforms (2/2)
1. Architecture demonstrated by functionality
2. Application = Component + Scheduler
Robot Sensor Networks
HanyangUniversity
Component Architecture in Mote (1/2)
1. Note:
Low‐level feedback control is implemented in robot component.
Command interpreter/executer are implemented in the main application
myMotor myADC Server Led Timer Xnp
Robot Component Communication
Main application

Robot Sensor Networks
HanyangUniversity
1. What is a component ?
Similar to a object in C++
Provide programming interface
(command / event )
Implementation encapsulated
2. Main components in mote
ADC server (ADCServer)
Led (Led), Timer (Timer)
Motor (myMotor)
Communication (myComm)
Xnp (for wireless download)
Robot component
Main component
COMPONENT
event command
COMPONENT
COMPONENT
Task
signal
Component Architecture in Mote (2/2)
Robot Sensor Networks
HanyangUniversity
Software
Hardware
Mote Application
Clock
ADC ServerPWM
Active Message
RFM UART Motor ADC
Sensor
Mote Input‐Output Structure

Robot Sensor Networks
HanyangUniversity
Sensor Network Platform (1/2)
1. Atmel ATmega128L
32 kHz crystal
10 bit ADC
UART
SPI bus
2. Radio (Chipcon CC1000)
3. External serial flash
memory(512kbyte)
4. Connectors for interfacing to sensor
and programming boards
5. 3 programmable LEDS
6. JTAG port
ATmega 128L
Serial F
lash
LEDS
Radio
Extern
al Connecto
rs
Robot Sensor Networks
HanyangUniversity
Sensor Network Platform (2/2)
1. Inverted‐F Microstrip Antenna and SMA Connector
2. Inverted‐F
Pseudo Omni‐directional
50m range indoors
125m range outdoors
Optimum at 2400‐2460MHz
3. SMA Connector
Enabled by moving a capacitor
> 125m range
Optimum at 2430‐2483MHz

Robot Sensor Networks
HanyangUniversity
Sensor
1. Integrated SensorsSensirion SHT111) Humidity (3.5%)
2) Temperature (0.5oC)
3) Digital sensor
Hamamatsu S10871) Photosynthetically active light
2) Silicon diode
Hamamatsu S1337‐BQ1) Total solar light
2) Silicon diode
2. Expansion6 ADC channels
4 digital I/O
Existing sensor boards1) Magnetometer, Ultrasound
2) Accelerometer, 4 PIR sensors
3) Microphone, Buzzer
dot
mag ultrasound
acoustic
Robot Sensor Networks
HanyangUniversity
Low Power Operation
1. Efficient Hardware
Integration and Isolation
1) Complementary functionality (DMA, USART, etc)
Selectable Power States (Off, Sleep, Standby)
Operate at low voltages and low current
1) Run to cut‐off voltage of power source
2. Efficient Software
Fine grained control of hardware
Utilize wireless broadcast medium
Aggregate

Robot Sensor Networks
HanyangUniversity
Typical WSN Application
1. Periodic
Data Collection
Network Maintenance
Majority of operation
2. Triggered Events
Detection/Notification
Infrequently occurs
1) But… must be reported quickly
and reliably
3. Long Lifetime
Months to Years without
changing batteries
Power management is the key to
WSN success
sleep
wak
eup
processingdata acquisitioncommunication
Po
wer
Time
Robot Sensor Networks
HanyangUniversity
Design Principles
1. Key to Low Duty Cycle Operation:
Sleep – majority of the time
Wakeup – quickly start processing
Active – minimize work & return to sleep

Robot Sensor Networks
HanyangUniversity
Sleep
1. Majority of time, node is asleep
>99%
2. Minimize sleep current through
Isolating and shutting down individual circuits
Using low power hardware
1) Need RAM retention
3. Run auxiliary hardware components from low speed oscillators
(typically 32kHz)
Perform ADC conversions, DMA transfers, and bus operations while
microcontroller core is stopped
Robot Sensor Networks
HanyangUniversity
Overhead of switching from Sleep to Active Mode
Wakeup
Microcontroller Radio (FSK)
10ns – 4ms typical 1– 10 ms typical
2.5 ms292 ns

Robot Sensor Networks
HanyangUniversity
Active
1. Microcontroller
Fast processing, low active power
Avoid external oscillators
2. Radio
High data rate, low power tradeoffs
Narrowband radios Low power, lower data rate, simple channel encoding, faster startup
Wideband radios More robust to noise, higher power, high data rates
3. External Flash (stable storage)
Data logging, network code reprogramming, aggregation
High power consumption
Long writes
4. Radio vs. Flash
250kbps radio sending 1 byte Energy : 1.5mJ, Duration : 32ms
Atmel flash writing 1 byte Energy : 3mJ, Duration : 78ms
Robot Sensor Networks
HanyangUniversity
Minimize Power Consumption
1. Compare to MicaZ:
a Mica2 mote with AVR mcu and 802.15.4 radio
2. Sleep
Majority of the time
Telos: 2.4mA
MicaZ: 30mA
3. Wakeup
As quickly as possible to process and return to sleep
Telos: 290ns typical, 6ms max
MicaZ: 60ms max internal oscillator, 4ms external
4. Active
Get your work done and get back to sleep
Telos: 4‐8MHz 16‐bit
MicaZ: 8MHz 8‐bit

Robot Sensor Networks
HanyangUniversity
CC2420 Radio
1. Fast data rate, robust signal
250kbps : 2Mchip/s : DSSS
2.4GHz : Offset QPSK : 5MHz
16 channels in 802.15.4
‐94dBm sensitivity
2. Low Voltage Operation
1.8V minimum supply
3. Software Assistance for Low Power Microcontrollers
128byte TX/RX buffers for full packet support
Automatic address decoding and automatic acknowledgements
Hardware encryption/authentication
Link quality indicator (assist software link estimation)
1) samples error rate of first 8 chips of packet (8 chips/bit)
CC2420 ‐ IEEE 802.15.4 Compliant
Robot Sensor Networks
HanyangUniversity
1. Mica2 (AVR)
0.2 ms wakeup
30 mW sleep
33 mW active
21 mW radio
19 kbps
2.5V min
1) 2/3 of AA capacity
Power Calculation Comparison
2. MicaZ (AVR)
0.2 ms wakeup
30 mW sleep
33 mW active
45 mW radio
250 kbps
2.5V min
1) 2/3 of AA capacity
3. Telos (TI MSP)
0.006 ms wakeup
2 mW sleep
3 mW active
45 mW radio
250 kbps
1.8V min
1) 8/8 of AA capacity
Supporting mesh networking with a pair of AA batteries reporting data once every 3 minutes using synchronization (<1% duty cycle)
328 days 945 days453 days
Power Calculation Comparison ‐ Design for low power

Robot Sensor Networks
HanyangUniversity
CASP Lab. Platform소개
CASP Lab. Hardware & Software Platform
Robot Sensor Networks
HanyangUniversity
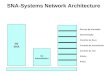
1. Anchor NodeCell에 고정된 Node로서, 주기적으로 Cell ID를 송신
환경 센서를 이용하여 주변 환경 정보 수집
2. Mobile Node개인 휴대용 Node, Anchor Node로부터 위치 정보(Cell ID)를 수신
수신된 위치정보를 Wall Node에 전송
가속도 센서 또는 생체 신호 센서를 이용해 긴급 상황 감지
3. Wall Node벽에 고정된 Node로서 라우팅 기능 담당
Mobile Node, Anchor Node로부터 전달 받은 정보를 Sink Node에 전송
4. Sink NodeWall Node로부터 전달 받은 정보를 Ez‐gate에 Serial Cable을 이용하여 전송
5. Ez‐gateSink Node에서 전달받은 정보를 Ethernet을 통해 Task Manager에 전송
6. Tast ManagerEz‐gate를 통해 전달받은 정보를 가공하여, 화면에 출력
특정 Node에 명령 가능.
System organization (1/2)

Robot Sensor Networks
HanyangUniversity
System organization (2/2)
분산처리, 통합전송센서 센싱, OTA, Downlink, 알람
위치정보, 환경, OTA, Downlink
Uplink, OTA, Downlink,역할
512KB4KBBoot ROM
32MB4KBSRAM
64MB128KBFlash
400MHz8MHzMCU Speed
Hardware
Linux Kernel 2.6Tiny OS Version 1.1.14OS
3축 가속도빛, 온도, 습도, 동작,
휘어짐 등Sensor
CC2420 + 802.11, 802.3
Chipcon CC2420(2.4GHz)RF
Intel PXA255Atmel ATmega 128LMCU
Sink NodeMobile NodeAnchor NodeWall Node
Robot Sensor Networks
HanyangUniversity
Wall Node
ATMEL128L
Interrupt Timer
ADC
Flash
JTAG
SerialPort
CC2420
Oscillator PCB Antenna
SMA Antenna

Robot Sensor Networks
HanyangUniversity
Anchor & Mobile Node
ATMEL128L
Interrupt Timer
ADC
Flash
JTAG CC2420
Oscillator
PCB Antenna
Sensor module
SMA Antenna
Robot Sensor Networks
HanyangUniversity
PXA255(Intel ARM Processor)
Linux 2.4 Flash ROM
SDRAM& Buffer
JTAG Wall Node
Oscillator & 전원
Serial Interface
Board Debugging
LAN Controller
RS232 & USB
컴퓨터와통신용
Ez‐Gate

Robot Sensor Networks
HanyangUniversity
Up link & Down link (1/2)
1. 알고리즘의 핵심
Up link와 down link를 sink노드(down link)와 주변 노드(up link)로 분리하여
적용
기본적인 down link 알고리즘 connected source routing
2. Sink node:
센서노드에 비해서 에너지와 메모리의 사용량이 거의 제한이 없음
Up link되어 들어오는 토플로지 정보 저장 및 down link pass결정에 유리함
3. Sensor node:
실제 필드에서 활동을 하므로 주변 상황에 따라서 up link 라우팅 패스의 결정
에 유리함
Robot Sensor Networks
HanyangUniversity
Up link & Down link (2/2)
1. Uplink (Reverse Link)
주변 센서 Node들이 Data를 Sink
Node로 전송 하기 위한 라우팅 방법
2. Downlink (Forward Link)
Sink Node에서 특정 센서 Node로
전송하기 위한 라우팅 방법

Robot Sensor Networks
HanyangUniversity
Message format
Up link message
Sensing data
Sequence number
Origin address
Source address
Parent address
Direction flag
Mac header
Down link message
Parent address3
Parent address2
Parent address1
Dest. address
Origin address
Direction flag
Mac header
Command message
Command or dataSequence number
Dest. address
Origin address
Direction flag
Mac header
Direction flag
0= up link1=down link2=down link lock3=down link free5=peer to peer6=reply message
특정 Node에 명령
Robot Sensor Networks
HanyangUniversity
Up Link

Robot Sensor Networks
HanyangUniversity
Downlink Sequence (1/4)
1211
1110
105
53
32
21
1Sink
11105
321
Direction flag
0= up link
1=down link
2=down link lock
3=down link free
5=peer to peer
6=reply messageSink
4
6 987
parent
source
parent
source
parent
source
12
parent
source
parent
source
parent
source
origin
Mac
header
Parent
address
Source
address
Direction
flag = 0
Origin
address
Multihop message
Robot Sensor Networks
HanyangUniversity
Downlink Sequence (2/4)
1 2 3
1 2 3
5 10 11
5 10 11
Sink
4
6 987
parent
source
parent
source
parent
source
origin
source
12
Mac
header
Direction
flag = 1
Source message
Origin
address
Parent
address 1
Parent
address 2
Parent
address 3
Dest.
address
Mac
header
Direction
flag = 2base
Dest. address
12
Sequence
Direction flag
0 = up link
1 = down link
2 = down link lock
3 = down link free
5 = peer to peer
6 = reply message
Mac
headerbase
Dest. address
12
Direction
flag = 2

Robot Sensor Networks
HanyangUniversity
Downlink Sequence (3/4)
11105
321
Sink
4
6 987
parent
source
parent
source
parent
source
origin
source
12
Mac headerDirection flag =6
Reply origin address 12
Sequence
Direction flag
0= up link1=down link2=down link lock3= down link free5= peer to peer6= reply message
Mac headerDirection flag=6
Source message
Originaddress
Robot Sensor Networks
HanyangUniversity
Downlink Sequence (4/4)
1 2 3
5 10 11
Sink
4
6 987
parent
source
parent
source
parent
source
origin
source
12
Mac headerDirection flag=5
base buzzer onDest. address
12
Sequence
Direction flag
0= forward1= inverse 2= inverse lock3= inverse free5=Bi‐direction
Mac headerDirection flag=1
Source message
Originaddress
Command Dest. address
Sequence number
Sequence number

Robot Sensor Networks
HanyangUniversity
Error Control
1. Down link connection error
센서 네트워크의 토플로지는 센서 노드의 주변 상황에 따라서 변하기 때문에
down link 시에 connection 에러
2. Peer to peer error
connection 이후에 통신 할 때 packet이 loss 되는 에러
3. 해결방법
센서 노드로부터 up link되어오는 우회 경로와 reply message, sequence
message이용
Down link connect error and sequence error
base
4
2
1
Up link
message
Up linkmessage
Replace
route p
assReplaceroute pass
×
Robot Sensor Networks
HanyangUniversity
Software Updates by OTA
1. 왜 필요한가?
버그 수정, S/W 업그레이드
새로운 H/W 추가, 센서 Node 기능 변경
2. 전파를 이용한 센서 Node 프로그래밍 방법
3. In‐System programming 방식
One‐to‐One
선을 이용, 호스트에 직접 연결
=> 위험한 지역에 Node가 존재하면?
Node 수에 비례하여 시간이 소요
=> Node 수가 많다면?
4. OTA programming 방식
One‐to‐Many, 전파를 이용, 보다 효율적
MOTE
MOTE
MOTE
Bug Fix
S/W Upgrade
MOTE
MOTE
MOTE
MOTE
In‐Systemprogramming
OTA programming

Robot Sensor Networks
HanyangUniversity
Incremental Updates
1. 두 개의 프로그램 이미지를
비교하여 서로 다른 부분만을
Updates하는 방법
2. Traditional Updates
프로그램 크기에 비례하여 전송
패킷 증가
3. Incremental Updates
라디오 전송 에너지 감소
보다 효율적
Robot Sensor Networks
HanyangUniversity
Task Manager v0.8
1. 다수의 Ez‐gate에서 발생하는 데이터를 관리하기 위한 Application
관리자에게 각각의 Ez‐gate를 관리하기 용이하도록 통합 GUI 환경 제공
Task Manager v0.8
2. 개발 환경
OS: Windows XP
Compiler: Visual Studio .NET
3. 실행 환경
Windows NT/2000/XP/2003
4. 기능
센서 필드로부터 정보 수집
1) Mobile Node의 위치 및 상태 정보
2) Mobile Node 주변의 환경 정보
GUI를 이용한 센서 필드의 현재 상태 표시
센서 필드의 특정 Node로 메시지 전달
1) 위급 상황 발생 시 구급요원 Node에 메시지 전달
다수의 Ez Gate 관리를 위한 Task Manager
Ez Gate
Ez GateEz Gate
Task Manager v0.8

Robot Sensor Networks
HanyangUniversity
Data Aggregation Algorithm
1. 다수의 패킷을 하나로 통합
전체 트래픽 감소 및 패킷 사용 효율 증가
패킷 통합을 위한 알고리즘 작성 및 구현
2. Mobile 및 wall Node에 적용
Node A
Node B
Node C
Node D
A
C
BSink Node
ABC
Node A
Node B
Node C
노드D
A
C
BSink 노드
A
C
B
새로운 알고리즘 적용 전 새로운 알고리즘 적용 후
Robot Sensor Networks
HanyangUniversity
History Buffer Algorithm
1. History Buffer를 이용한 패킷 중복 전송 방지
중복된 패킷 검출 시 폐기
트래픽 감소 및 Sink Node의 데이터 처리 부하 감소
2. Mobile 및 wall Node에 적용
새로운 알고리즘 적용 전 새로운 알고리즘 적용 후Node A
Node B
Node C
Node D
A
ASink Node
A
Drop
A
A
Node A
Node B
Node C
Node D
A
ASink Node
A
A
A

Robot Sensor Networks
HanyangUniversity
다양한 Platform 소개
다양한 Hardware & Software Platform 소개
Robot Sensor Networks
HanyangUniversity
Variety of Sensor Node Platforms
1. Hanback ZigbeX
2. RSC (Rockwell Science Center) WINS & Hidra
3. Sensoria WINS
4. Berkeley’s Motes
5. UCLA’s iBadge
6. UCLA’s Medusa MK‐II
7. Berkeley Piconodes
8. Telos Platform
9. MIT’s μAMPs
10. Intel iMote

Robot Sensor Networks
HanyangUniversity
Hanback ZigbeX
1. Computing
Atmel 8‐bit RISC microcontroller (CPU 7.3728Mhz)
128KB Flash program memory
4KB SRAM
2. Radio Transceiver
Chipcon CC2420
Radio range: (130m)
Data rate: 240 Kbits/sec
Frequency range: 2.4 GHz (ISM)
3. TinyOS, Nano‐Qplus(ETRI 한국형 OS)
4. Base sensor + Multi‐modal Sensor Board
Robot Sensor Networks
HanyangUniversity
RSC WINS & Hidra Nodes
3.3v3.3v5 v
3.3v
RS232
5 v
5 v
1. Consists of 2”x2” boards in a
3.5”x3.5”x3” enclosure
StrongARM 1100 processor @ 133
MHz
1) 4MB Flash, 1MB SRAM
Various sensors
1) Seismic (geophone), Acoustic
2) magnetometer, accelerometer,
temperature, pressure
RF communications
1) Connexant’s RDSSS9M Radio @ 100
kbps, 1‐100 mW, 40 channels
eCos RTOS
2. Commercial version: Hidra
μC/OS‐II
TDMA MAC with multihop routing
3. http://wins.rsc.rockwell.com/

Robot Sensor Networks
HanyangUniversity
1. WINS NG 2.0Development platform used in DARPA SensIT
SH‐4 processor @ 167 MHz
DSP with 4‐channel 16‐bit ADC
GPS
imaging
dual 2.4 GHz FH radios
Linux 2.4 + Sensoria APIs
Commercial version: sGate
2. WINS Tactical Sensor Nodegeo‐location by acoustic ranging and angle
time synchronization to 5 μscooperative distributed event processing
Ref: based on material from Sensoria slides
Sensoria WINS NG 2.0, sGate,
and WINS Tactical Sensor
Sensoria WINS (1/3)
Robot Sensor Networks
HanyangUniversity
Sensoria WINS (2/3)
ProcessorRAMFlash
GPS
Address/Data Bus
DSPPreprocessor
Multi-ChannelSensor
Interface
AnalogFrontEnd
PreprocessorInterface
ImagerInterface
ImagerModule
ModularWireless and Digital Interfaces
RFModem
1
RFModem
2
DigitalI/O
10/100Ethernet
Ref: based on material from Sensoria slides
Sensoria Node Hardware Architecture

Robot Sensor Networks
HanyangUniversity
Sensoria WINS (3/3)
Sensoria Node Software Architecture
DS P/
AD CRF
1 RF
2 GP S Du al Co
de c uC
RF
M
odem
1In
terf
ace
RF
M
odem
2In
terf
ace
DS
PIn
terf
ace
Sen
sor
Inte
rfac
e
GP
S
Inte
rfac
e
Aco
ustic
Ran
ging
Inte
rfac
e
Pla
tform
Inte
rfac
e
GP
IO
Ser
ial
Linux 2.4 Kernel
RF
Mod
em
Con
trol
Dis
cove
ry/
Sel
f-A
ssem
bly
Rou
ting
Mes
sagi
ng
Geo
loca
tion
Sen
sing
Sig
nal
Pro
cess
ing
Inte
r-N
ode
Ran
ging
Pro
cess
M
anag
emen
t
Pla
tform
M
anag
emen
t
WINS Node API
GeneralPurposeApp 1
GeneralPurposeApp 2
GeneralPurposeApp 3
GeneralPurposeApp 4
32 Bit RISC Processor Hitachi SH-4, DSP Preprocessor
Linux 2.4 OS- Native Kernel with support for PCMCIA, RPM
Sensoria APIs for RF Modem, Analog Sampling, File System, PSMISC, GAWK etc.
Robot Sensor Networks
HanyangUniversity
Berkeley Motes (1/4)
Rene2, Dot, Mica, WeC Hardware, 2 AA Batteries, RFM TR1000
Tiny OS – Preemptive, FIFO scheduler,Command & Event Interface
Mate’ Virtual Machine
Programming API

Robot Sensor Networks
HanyangUniversity
Berkeley Motes (2/4)
1. Devices that incorporate
communications, processing,
sensors, and batteries into a
small package
2. Atmel microcontroller with
sensors and a communication
unit
RF transceiver, laser module,
or a corner cube reflector
temperature, light, humidity,
pressure, 3 axis
magnetometers, 3 axis
accelerometers
3. TinyOS
light, temperature, 10 kbps @ 20m
Robot Sensor Networks
HanyangUniversity
1. Atmel ATMEGA103
4 Mhz 8‐bit CPU
128KB Instruction Memory
4KB RAM
2. 4 Mbit flash (AT45DB041B)
SPI interface
Two 264‐byte SRAM Data Buffers
3. RFM TR1000 radio
50 kb/s – ASK
4. Network programming
5. 51‐pin connector
Analog compare + interrupts
RFM : Radio Frequency Module
SPI : Serial to Parallel Interface
Atmega128 Microcontroller
TR 1000 Radio Transceiver4Mbit External Flash
51‐Pin I/O Expansion Connector
Power Regulation MAX1678 (3V)
8 Analog I/O8 Programming
Lines
SPI Bus
CoprocessorTransmissionPower Control
Hardware Accelerators
Digital I/O
DS2401 Unique ID
Berkeley MICA Architecture
Berkeley Motes (3/4)

Robot Sensor Networks
HanyangUniversity
J.Hill at al. “System Architecture Directions for Networked Sensors” [online]. Available: http://www.cs.virginia.edu/~qc9b/cs851/SADofNS_2.ppt
Berkeley Motes (4/4)
Robot Sensor Networks
HanyangUniversity
UCLA iBadge (1/2)
1. Wearable Sensor Badge
acoustic in/out + DSP
temperature, pressure,
humidity, magnetometer,
accelerometer
ultrasound localization
orientation via magnetometer
and accelerometer
bluetooth radio
2. Sylph Middleware

Robot Sensor Networks
HanyangUniversity
StorageService
SensorConfigurationManager
BrowsersSpeechRecogn.Service
BayesianFusionService
SensorApps
Sylph Middleware
UCLA iBadge (2/2)
Robot Sensor Networks
HanyangUniversity
1. 40MHz ARM THUMB
1MB FLASH, 136KB RAM
0.9MIPS/MHz 480MIPS/W (ATmega 242MIPS/W)
2. RS‐485 bus
Out of band data collection, formation of arrays
3. 3 current monitors (Radio, Thumb, rest of the system)
4. 540mAh Rechargeable Li‐Ion battery
UCLA’s Medusa MK‐II
UCLA Medusa MK‐II Localizer Nodes
Mega128L
AT91FR4081
ADXL202
RS‐485
PButton
PButton
PMTU
RFM
UART,JTAG,GPS
UART &JTAG
SPI
SPI
ADC/SPI/GPIO
Connector 1
Connector 2
Ultasnd RX/TXAccessory Board
Light &Temp

Robot Sensor Networks
HanyangUniversity
Components and batterymounted on back
5 cm
7.6 mm
3 cm
Solar Cell(0.5 mm) Battery
(3.6 mm)
PCB (1 mm)
Chip encapsulation(1.5 mm)
Version 1: Light Powered
Version 2: Vibration Powered
Size determined by powerSize determined by powerdissipation (1 mW dissipation (1 mW avgavg))
Ref: from Jan Rabaey, PAC/C Slides
BWRC’s PicoNode TripWire Sensor Node
Berkeley Piconodes (1/3)
Robot Sensor Networks
HanyangUniversity
LocalHW
MAC
DW8051
256DATA
Interconnect network
ADC
4kBXDATA
16kBCODE
PHY
ChipSupervisor
SIF
SIFADC
Serial
GPIO
FlashIF
Serial
• Reactive inter‐ and intra‐chip signaling•Modules in power‐down (low‐leakage) mode by default• Events at interface cause wake‐up• Hw Modules selected to meet flexibility needs while optimizing energy efficiency (e.g. 8051 microcontroller)
DLL (MAC)
App/UI
Network
Transport
Baseband
RF (TX/RX)
Sensor/actuatorinterface
Locationing
Aggregation/forwarding
User interface
Sensor/actuators
Antenna
ChipSupervisor
Reactiveradio
Energy train
1 mW on< 10 mW sleepSize: 6 mm2
Ref: from Jan Rabaey, PAC/C Slides
Berkeley Piconodes (2/3)

Robot Sensor Networks
HanyangUniversity
Berkeley PicoNode (3/3)
1. Defined Goals ‐ Single chip, ultra‐low power PicoNode. Custom low power
application, protocol, network, MAC, and physical layers implemented on flexible
low‐power computation fabrics
2. Applications – Consumer Use.
Robot Sensor Networks
HanyangUniversity
Telos Platform
1. A new platform for low power research
Monitoring applications:
1) Environmental, Building, Tracking
2. Long lifetime, low power, low cost
3. Built from application experiences and low duty cycle design principles
4. Robustness
Integrated antenna , Integrated sensors, Soldered connections
5. Standards Based
IEEE 802.15.4, USB
6. IEEE 802.15.4
CC2420 radio, 250kbps, 2.4GHz ISM band
7. TI MSP430
Ultra low power
1) 1.6μA sleep, 460μA active, 1.8V operation
Open embedded platform with open source tools, operating system (TinyOS), and designs.

Robot Sensor Networks
HanyangUniversity
MIT µAMPS (1/2)
Robot Sensor Networks
HanyangUniversity
MIT µAMPS (2/2)
1. ‘highly integrated, yet flexible sensor node based on two dedicated
chips’ (off‐the‐shelf ‐> systems on chip)
2. StrongARM SA1110 32‐bit, 206MHz, RISC processor
3. 3 acoustic sensors attached to each
node, for estimation of direction of
target (µAMPS I)
[9]

Robot Sensor Networks
HanyangUniversity
Intel iMote
1. Designed to be a high‐bandwidth sensor platform비디오나 마이크와 같은 멀티미디어 센서를 제어하기 위한 센서
2. Computing
Strong ARM 32‐bit RISC processor
512KB Flash, 64 KB SRAM
3. Radio Transceiver
Bluetooth
Data rate: 500 Kbps ~ 1 Mbps
Frequency : 2.4 GHz (ISM)
4. TinyOS
Multi Sensing
Vibration sensing
Robot Sensor Networks
HanyangUniversity
Q & A
1. 경청해 주셔서 감사합니다.
2. Q & A
Recommended