Dasar Dasar Sistem kontrol
Tujuan : 1. Mempelajari dasar dasar system
kontrol kontrol 2. Mempelajari kontrol lup terbuka dan
tertutup 3. Mempelajari prinsip-prinsip disain
system kontrol

Kompetensi
1. Mampu memahami prinsip kerja system kontrol
2. Memahami perbandingan kontrol lup tertutup dengan terbuka sehingga mampu
2. Memahami perbandingan kontrol lup tertutup dengan terbuka sehingga mampu menetukan system kontrol mana yang akan dipakai untuk aplikasi yang sesuai
3. Mampu memodifikasi atau mendisain system kontrol

Ilustrasi Perkembangan Sistem Kontrol1. System kontrol automatik pertama adalah governor sentrifugal untuk
pengontrolan kecepatan mesin uap yang dibuat oleh James Watt pada abad ke-18
2. 1922-Minorsky membuat kontroler automatik untuk mengemudikan kapal dengan cara menentukan kestabilan dari persamaan diferensial
3. 1932-Nyquist mengembangkan suatu prosedur yang relatif sederhana untuk menentukan kestabilan sistem lup tertutup pada basis respon lup terbuka terhadap masukan lunak (steady state) sinusoida
4. 1934-Hazen, yang memperkenalkan istilah servomekanisme untuk system 4. 1934-Hazen, yang memperkenalkan istilah servomekanisme untuk system kontrol posisi, membahas desain servomekanisme relai yang mampu mengikuti dengan baik masukan yang berubah
5. 1940-an, metode respon frekuensi untuk mendesain system kontrol liniar berumpan-balik yang memenuhi persyaratan performansi.
6. Aakhir tahun 1940 hingga awal tahun 1950, metoda tempat kedudukan akar dalam disain system kontrol.
7. Teori kontrol modern dapat dikatakan menuju pada kontrol optimal. Penerapan teori kontrol modern dalam bidang non-teknik seperti biologi, ekonomi, kedokteran, dan sosiologi sekarang banyak dilakukan dan hasil-hasil yang menarik dan berarti akan dapat diperoleh di masa dating.

Definisi dalam Sistem Kontrol1. Plant = adalah seperangkat peralatan, mungkin hanya terdiri dari
beberapa bagian mesin yang bekerja bersama-sama, yang digunakan untuk melakukan suatu operasi tertentu.
2. Proses = operasi atau perkembangan alamiah / sengaja dibuat, yang berlangsung secara kontinyu yang ditandai oleh suatu deretan perubahan kecil yang berurutan dengan cara yang relatif tetap dan menuju ke suatu hasil atau keadaan akhir tertentu
3. Sistem = kombinasi dari beberapa komponen yang bekerja bersama-sama dan melakukan suatu sasaran tertentu sama dan melakukan suatu sasaran tertentu
4. Gangguan (disturbances) = suatu sinyal yang cenderung mempunyai pengaruh yang merugikan pada harga keluaran system
5. Sistem kontrol berumpan-balik (feedback control system) = system kontrol yang cenderung menjaga hubungan yang telah ditentukan antara keluaran dan masukan acuan dengan membandingkannya dan menggunakan selisihnya sebagai alat pengontrolan
6. Servomekanisme (servomechanisms) = system kontrol berumpan-balik dengan keluaran berupa posisi, kecepatan, atau percepatan
mekanik

KONTROL LUP TERTUTUP� Merupakan system kontrol yang sinyal keluarannya
mempunyai pengaruh langsung pada aksi pengontrolan� Sistem kontrol lup tertutup adalah system kontrol
berumpan balik. � Sinyal kesalahan penggerak merupakan selisih antara
sinyal masukan dan sinyal umpan-balik� Sinyal kesalahan penggerak merupakan selisih antara
sinyal masukan dan sinyal umpan-balik

Konsep sistem kontrol lup tertutup pada sistem termal� Di sini manusia bekerja sebagai kontroler untuk menjaga
temperatur air panas pada harga tertentu. Termometer yang dipasang pada pipa keluaran air panas mengukur temperatur yang sebenarnya dan sebagai keluaran system
� kontroler automatik digunakan untuk menggantikan operator manusia

Sistem kontrol lup terbuka �Sistem kontrol lup terbuka adalah system kontrol yang
keluarannya tidak berpengaruh pada aksi pengontrolan, jadi keluarannya tidak diukur atau diumpan balikan untuk dibandingkan dengan masukan
�Sebuah contoh praktis adalah mesin cuci. Perendaman, pencucian dan pembilasan pada mesin. Mesin ini tidak pencucian dan pembilasan pada mesin. Mesin ini tidak mengukur sinyal keluaran, misalnya kebersihan pakaian.

Perbandingan antara system kontrol lup tertutup dengn lup terbuka.

Sistem pengontrolan tekananGambar di bawah ini menunjukkan suatu system pengontrolan tekanan. Tekanan dalam tungku dikontrol berdasarkan posisi “damper”. Tekanan ini diukur dengan elemen pengukur tekanan. Jadi, sinyal yang diperoleh diumpankan ke kontroler untuk dibandingkan dengan harga yang diinginkan. Jika terdapat pebedaan atau kesalahan, keluaran kontroler diumpankan ke actuator yang mengatur posisi
damper untuk memperkecil kesalahan

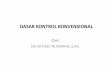
Sistem pengontrolan kecepatanPrinsip dasar dari governor Watt untuk mesin uap dilukiskan dengan diagram skematik pada gambar dibawah ini. Besarnya laju aliran uap yang masuk ke silinder mesin diatur sesuai dengan selisih antara kecepatan mesin yang diinginkan dan kecepatan mesin yang sebenarnya.

Sistem kontrol numeric• Kontrol numeric adalah suatu metoda pengontrolan gerak
dari komponen mesin dengan menggunakan angka-angka. • Pada kontrol numeric, gerak benda kerja dapat dikontrol
dengan informasi biner yang disimpan pada sebuah pita

Prinsip-prinsip disain system kontrol
1. Persyaratan umum system kontrol
2. Persoalan dasar dalam disain system kontrol
3. Analisis3. Analisis
4. Disain
5. Sintesis
6. Pendekatan dasar dalam disain system kontrol

Persyaratan umum system kontrol
1. Setiap system kontrol harus stabil
2. System kontrol harus mempunyai kestabialan relatif yang layak
3. Kecepatan respon harus cukup cepat dan menunjukkan peredaman yang layak
4. Suatu system kontrol juga harus mampu memperkecil kesalahan sampai nol atau sampai pada suatu harga yang dapat ditoleransi

Persoalan dasar dalam disain system kontrol1. Kontroler menghasilkan sinyal kontrol yang didasarkan pada variable acuan
masukan dan variable keluaran2. Pada praktiknya, selalu ada beberapa gangguan yang bekerja pada “plant”. 3. Untuk menentukan system kontrol optimal, perlu didefinisikan indeks
performansi. 4. Spesifikasi sinyal kontrol diseluruh waktu operasi disebut hukum kontrol. Secara
matematika, persoalan dasar kontrol adalah menentukan hukum kontrol optimal, dengan berbagai kendala teknik dan ekonomi, yang berarti meminimumkan indeks performansi yang diberikanindeks performansi yang diberikan

Analisis
� Yang dimaksud analisis system kontrol adalah penelitian, pada kondisi tertentu, performansi system yang model matematikanya diketahui
� Karena setiap system komponennya tersusun dari komponen, maka analisis harus dimulai dari komponen, maka analisis harus dimulai dari deskripsi matematika tiap komponen.
� Setelah model matematika keseluruhan system diturunkan, cara analisis yang digunakan tidak tergantung pada system fisiknya saja tetapi bisa pneumatik, listrik, mekanik, atau yang lain

Disain
Yang dimaksud dengan disain suatu system adalah mencari suatu system yang dapat menyelesaikan tugas yang diberikan. Pada menyelesaikan tugas yang diberikan. Pada umumnya, prosedur disain tidak diperoleh secara langsung tetapi memerlukan metode uji-coba

Sintesis
Yang dimaksud dengan sintesis adalah mencari suatu system dengan prosedur langsung yang akan bekerja menurut cara tertentu. Biasanya, prosedur bekerja menurut cara tertentu. Biasanya, prosedur semacam ini bersifat matematis dari awal sampai akhir proses disain. Pada saat ini telah tersedia banyak prosedur sintesis untuk rangkaian liniar dan untuk system liniar optimal

Pendekatan dasar dalam disain system kontrol
1. Pendekatan dasar dalam disain setiap systemkontrol praktis perlu melibatkan metode uji-coba.
2. Spesifikasi harus diinterpretasikan dalam2. Spesifikasi harus diinterpretasikan dalambentuk matematika sehingga secara keseluruhanmemenuhi spesifikasi tersebut dan dapatmenyelesaikan tugasnya dengan mudah

Soal (Kerjakan 15 menit)Perhatikan gambar system pengontrolan tinggi muka cairan
a. Jelaskan prinsip kerja system pengendalian tinggi muka cairan
b. Buatlah blok diagramnya dari gambar berikut
c. Buatlah blok diagramnya lagi jika operasi dikendalikan oleh
manusia (manual)




JawabDiagram Blok Sistem pengendalian tinggi permukaan cairan
Kontroller Katup Pneumatik
TangkiAir
Tinggi Permukaanyang diinginkan
Tinggi Permukaanyang sebenarnya
Pelampung
Otak Otot dan Katup TangkiAir
Mata
Tinggi Permukaanyang diinginkan
Tinggi Permukaanyang sebenarnya
Recommended