
Analisi e Modelli Matematici
Lezione 1
Marzo Aprile 2014

“Dobbiamo considerare lo stato presente dell’universo come effetto del suo stato anteriore e come causa del suo stato futuro. Una intelligenza che, per un dato istante, conoscesse tutte le forze di cui è animata la natura e la situazione rispettiva di tutti gli esseri che la compongono, se per di più fosse abbastanza grande da sottoporre i dati all’analisi, [...] l’avvenire come il passato sarebbero presenti ai suoi occhi.”
Pierre-Simon, marquise de Laplace; 23 Marzo 1749 – 5 Marzo 1827)
“Essai philosophique sur les probabilités”
“Se conoscessimo esattamente le leggi della natura e la s i t u a z i o n e d e l l ' u n i ve r s o all'istante iniziale, potremmo prevedere esattamente la situazione dello stesso universo in un istante successivo. Ma se pure accadesse che le leggi naturali non
avessero più alcun segreto per noi, anche in tal caso potremmo conoscere la situazione iniziale solo approssimativamente. “
Jules Henri Poincaré (29 Aprile 1854 – 17 Luglio 1912)
“Science et Mèthode”
“Se questo ci consentisse di prevedere la s i t u a z i o n e fi n a l e c o n l a s t e s s a approssimazione non occorrerebbe di più e potremmo dire che il fenomeno è stato previsto [...]. Ma non è sempre così: può accadere che piccole differenze nelle condiz ioni in iz ia l i ne producano di grandissime nei fenomeni finali. [...] La previsione diviene impossibile.”
“Science et Mèthode”

“Una causa piccolissima che sfugge alla nostra attenzione
determina un effetto considerevole che non
possiamo mancare di vedere, ed allora diciamo che l'effetto
è dovuto al caso.”
“Science et Mèthode”

Modello di Malthus
P (t) ≥ 0 e la ‘popolazione’ all’istante t ≥ 0
0 ≤ µ < 1 e coefficiente di mortalita
per unita di popolazione e di tempo
λhP (t) = numero di nuovi nati
nel periodo h
µhP (t) = numero di deceduti
nel periodo h
λ ≥ 0 e il coefficiente di fertilita
per unita di popolazione e di tempo

P (n+ 1) = (1 + λ− µ)P (n), per n = 0, 1, 2, . . .
Modello di Malthus
P (t) ≥ 0 e la ‘popolazione’ all’istante t ≥ 0
P (t+ h) = P (t) + λhP (t)− µhP (t)
nuovi nati deceduti
Se studiamo l’andamento della popolazione per tempi discreti, da un istante “n” al successivo “n+1” abbiamo la seguente
Legge di Evoluzione

Modello di Malthus
�P0 = α,
Pn+1 = qPn, per n ≥ 0.
Dato iniziale
Legge di ricorrenza
E’ un “modello” altamente semplificato e irreale!
Modello di Malthus
P0 = α,
P1 = qα,
P2 = qqα = q2α,
P3 = q(q2α) = q3α,
. . .
Pn = qnα.
E’ facile calcolare esplicitamente i termini della successione
Modello di Malthus
0 2 4 6 8 10
2
4
6
8
10
0 2 4 6 8 10
1
2
3
4
5
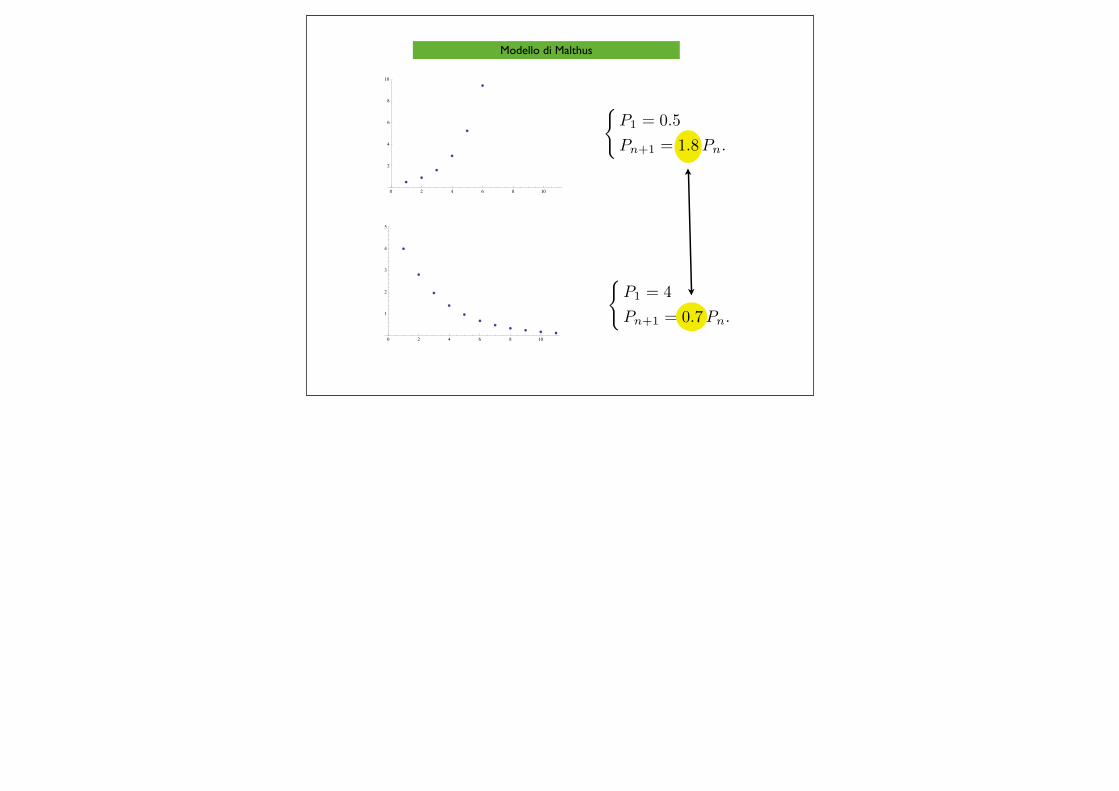
�P1 = 4
Pn+1 = 0.7Pn.
�P1 = 0.5
Pn+1 = 1.8Pn.
Modello di Malthus
0 2 4 6 8 10
2
4
6
8
10
0 2 4 6 8 10
1
2
3
4
5
limn→+∞
Pn = 0.
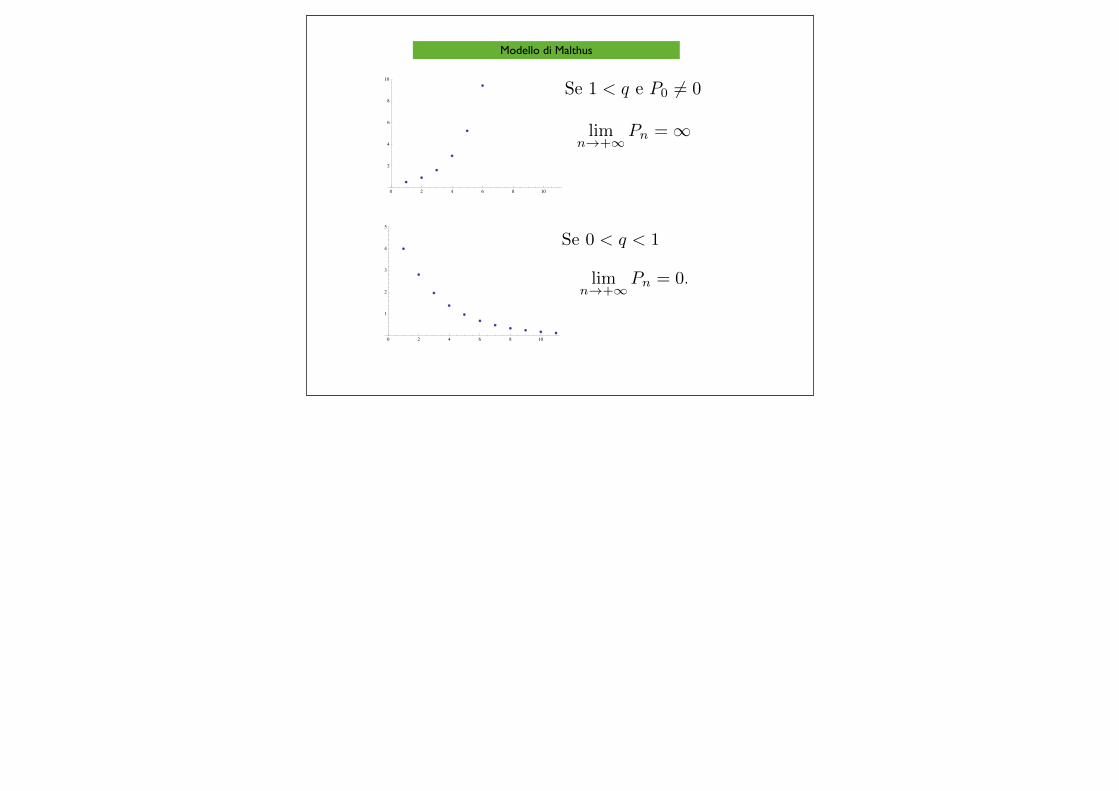
Se 1 < q e P0 �= 0
limn→+∞
Pn = ∞
Se 0 < q < 1

Modello di Malthus
0 2 4 6 8 10
2
4
6
8
10
0 2 4 6 8 10
1
2
3
4
5
limn→+∞
Pn = 0.
Se 1 < q e P0 �= 0 limn→+∞
Pn = ∞
Se 0 < q < 1
Le singole successioni dipendono dal dato iniziale, ma il loroandamento asintotico è largamente indipendente dal valore del dato iniziale.

Modello di Malthus modificato
�P0 = α,
Pn+1 = qPn + b.
Aggiungiamo un termine “b” maggiore o minore di zero. “b” potrebbe rappresentare un “flusso migratorio”
in entrata o in uscita

Modello di Malthus modificato
P0 = α,
P1 = qα+ b,
P2 = q(qα+ b) + b = q2α+ b(q + 1),
P3 = q(q2α+ qb+ b) + b = q3α+ b(q2 + q + 1),
. . .
Pn = qnα+ b(qn−1 + qn−2 + · · ·+ q + 1)
= qnα+ b1− qn
1− q.

Modello di Malthus modificato
Pn = qnα+ b1− qn
1− q
Se 0 < q < 1 e b qualsiasi allora
limn→+∞
Pn =b
1− q

Modello di Malthus modificato
Pn = qnα+ b1− qn
1− q
Se 1 < q e b ≥ 0 allora limn→+∞
Pn = +∞
Se 1 < q e b < 0 allora limn→+∞
Pn dipende da p0 e b
Problemi tipici�s0 = α,
sn+1 = f(sn), n ≥ 0.
1) Quale è lo stato del sistema in ogni istante futuro?
Problemi tipici
E’ possibile trovare una formula chiusa
�s0 = α,
sn+1 = f(sn), n ≥ 0.
sn = φ(n)che sia “soluzione”? Cioè tale che
�φ(0) = α
φ(n+ 1) = f(φ(n)), per n ≥ 0.

1) Quale è lo stato del sistema in ogni istante futuro?
2) Quale è l'andamento asintotico del sistema?
Problemi tipici�s0 = α,
sn+1 = f(sn), n ≥ 0.
limn→+∞
sn
Esistono cicli limite ?
Esiste?
1) Quale è lo stato del sistema in ogni istante?
2) Quale è l'andamento asintotico del sistema?
3) Se e come l'andamento del sistema dipende dal dato iniziale?
Spesso il dato iniziale è un elemento su cui è possibile intervenire.
Problemi tipici�s0 = α,
sn+1 = f(sn), n ≥ 0.
Nelle situazioni concrete il dato iniziale non è conosciuto con precisione arbitraria: possiamo ancora fare previsioni?
1) Quale è lo stato del sistema in ogni istante?
2) Quale è l'andamento asintotico del sistema?
3) Se e come l'andamento del sistema dipende dal dato iniziale?
4) Se e come l'andamento del sistema dipenda da parametri presenti nella legge di ricorrenza?
Problemi tipici
Esempio: nel modello precedente l’andamento asintotico non dipende da “b”
Nelle situazioni concrete la stessa legge fisica non è conosciuta perfettamente: possiamo ancora fare previsioni?

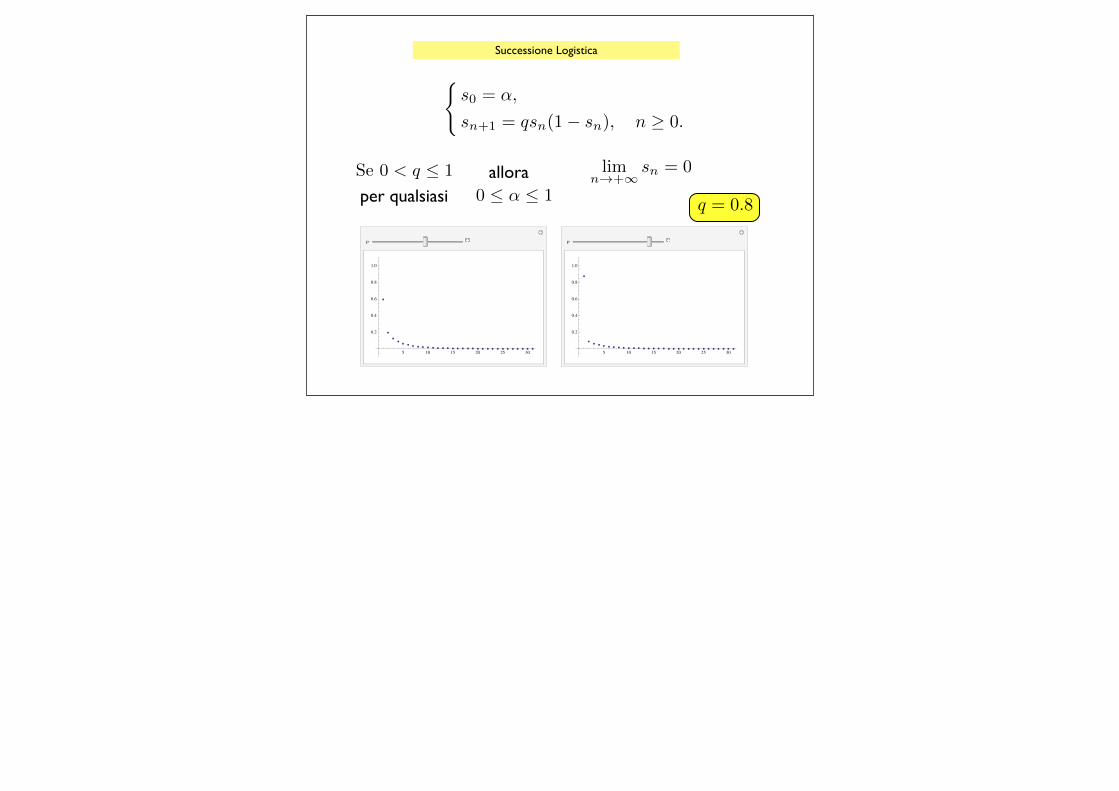
Successione Logistica
�s0 = α,
sn+1 = qsn(1− sn), n ≥ 0.
Il tasso di accrescimento della popolazione dipende da “fattori ambientali”
Il tasso di accrescimento “q” diminuisce e tende a zero quando la popolazione tende a “saturare” l’ambiente
0 ≤ sn ≤ 1 rappresenta la percentuale di occupazione dell’ambiente rispetto ad un massimo consentito
q(1− sn)rappresenta il tasso di accrescimento: è circa “q” solo se
la popolazione è scarsa rispetto alla soglia massima
Successione Logistica
�s0 = α,
sn+1 = qsn(1− sn), n ≥ 0.
Se 0 < q ≤ 1 allora limn→+∞
sn = 0
0 ≤ α ≤ 1per qualsiasi
p
5 10 15 20 25 30
0.2
0.4
0.6
0.8
1.0
p
5 10 15 20 25 30
0.2
0.4
0.6
0.8
1.0
q = 0.8
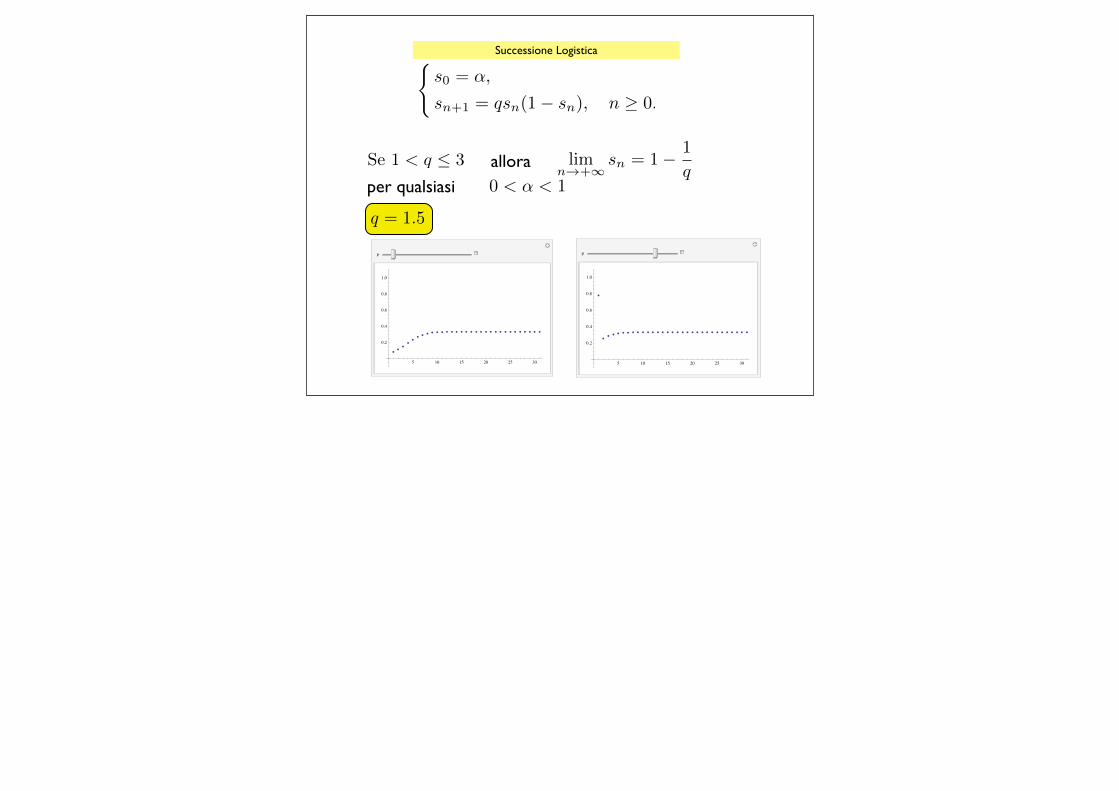
Successione Logistica�s0 = α,
sn+1 = qsn(1− sn), n ≥ 0.
0 < α < 1
alloraper qualsiasi
Se 1 < q ≤ 3 limn→+∞
sn = 1− 1
q
q = 1.5
p
5 10 15 20 25 30
0.2
0.4
0.6
0.8
1.0
p
5 10 15 20 25 30
0.2
0.4
0.6
0.8
1.0
q = 2.5
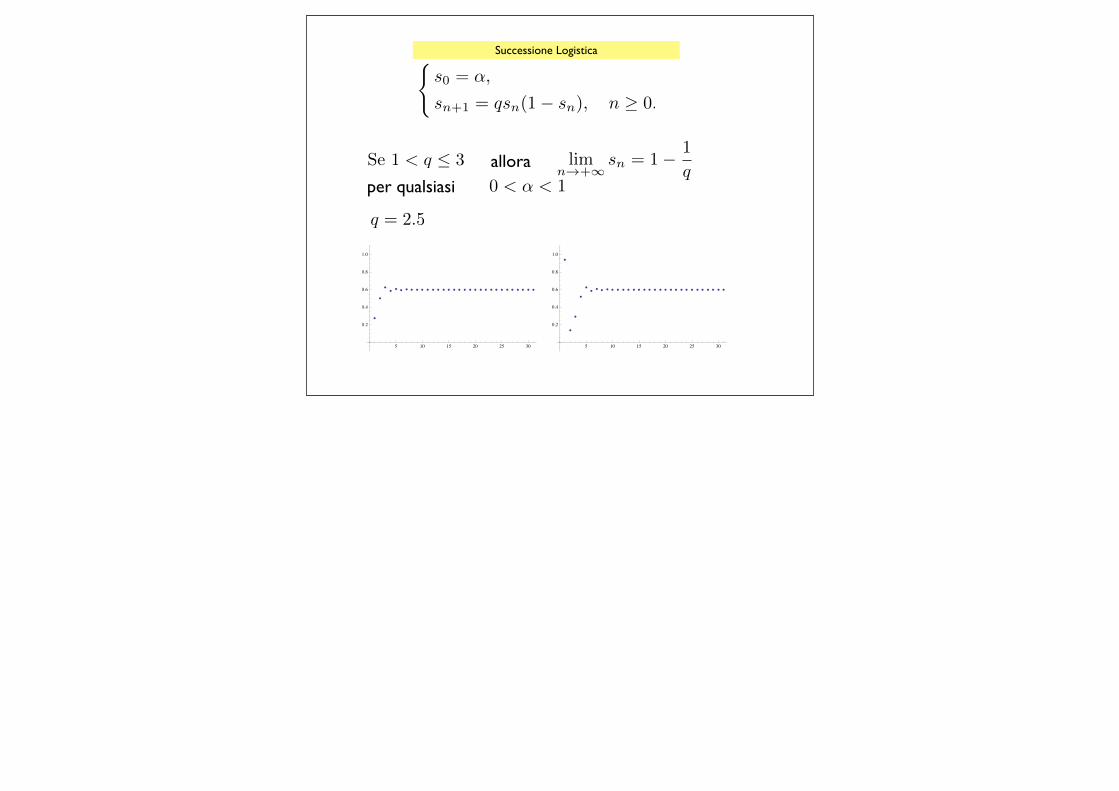
Successione Logistica�s0 = α,
sn+1 = qsn(1− sn), n ≥ 0.
0 < α < 1
alloraper qualsiasi
Se 1 < q ≤ 3 limn→+∞
sn = 1− 1
q
5 10 15 20 25 30
0.2
0.4
0.6
0.8
1.0
5 10 15 20 25 30
0.2
0.4
0.6
0.8
1.0
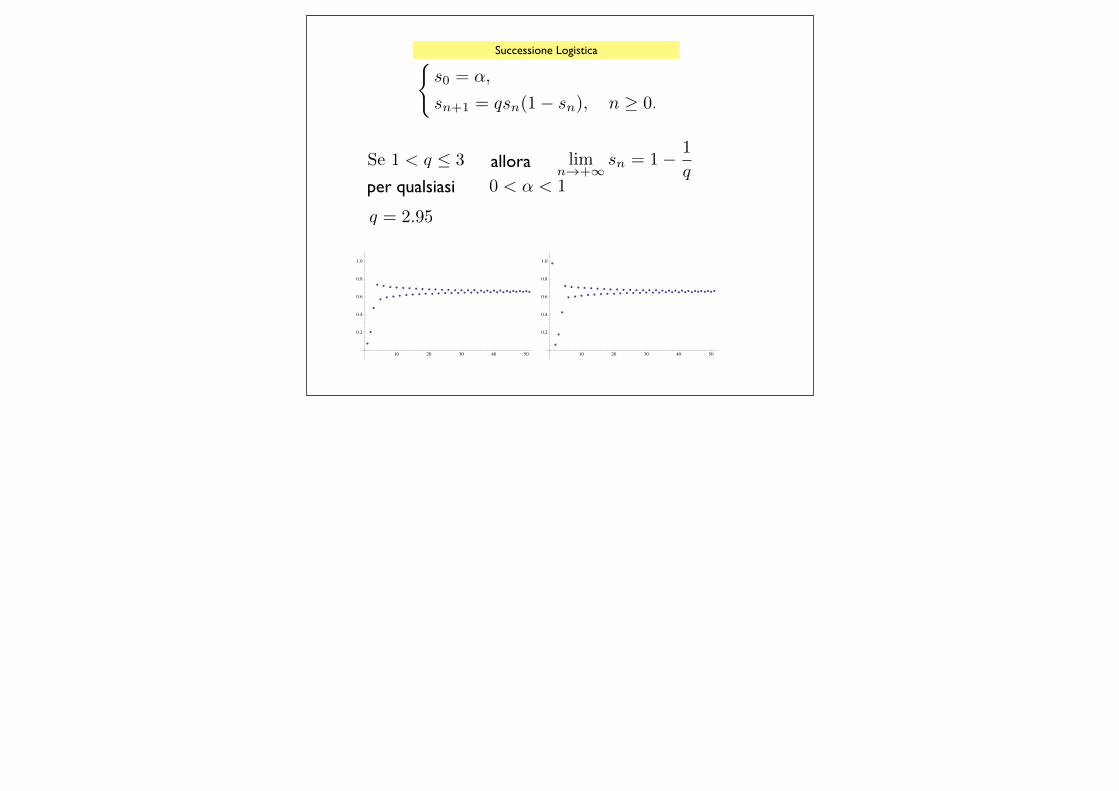
Successione Logistica�s0 = α,
sn+1 = qsn(1− sn), n ≥ 0.
0 < α < 1
alloraper qualsiasi
Se 1 < q ≤ 3 limn→+∞
sn = 1− 1
q
q = 2.95
10 20 30 40 50
0.2
0.4
0.6
0.8
1.0
10 20 30 40 50
0.2
0.4
0.6
0.8
1.0
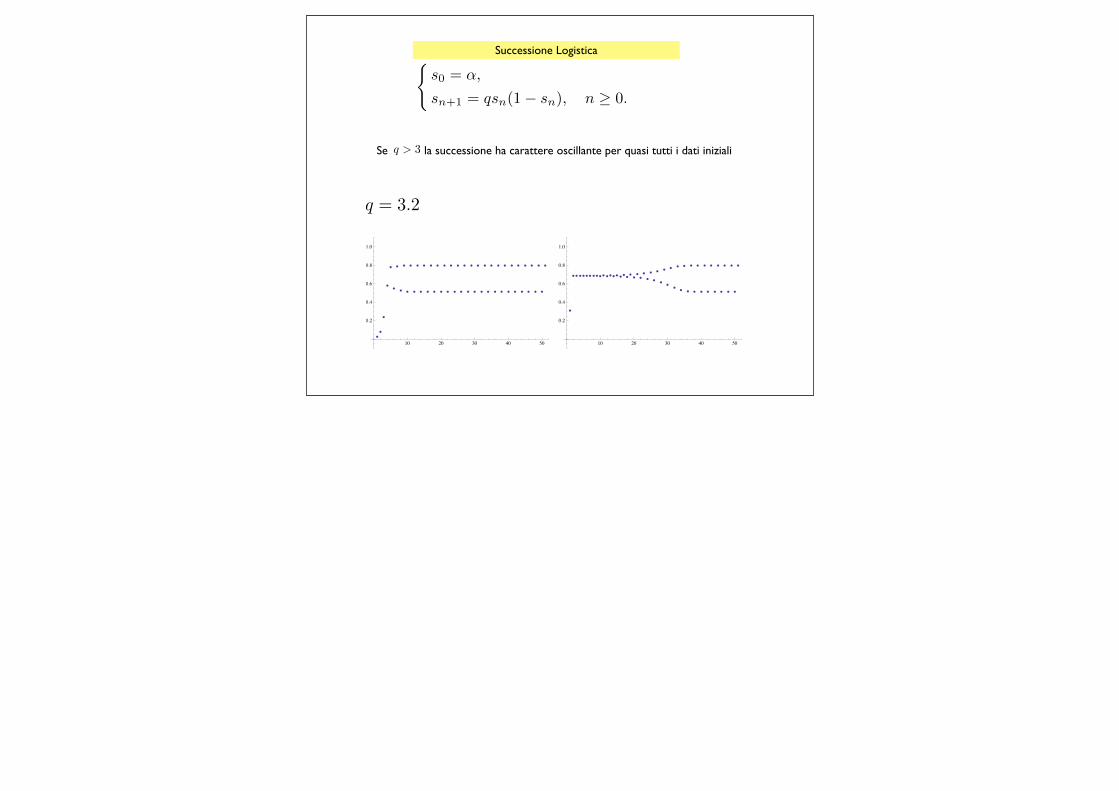
Successione Logistica�s0 = α,
sn+1 = qsn(1− sn), n ≥ 0.
q = 3.2
10 20 30 40 50
0.2
0.4
0.6
0.8
1.0
10 20 30 40 50
0.2
0.4
0.6
0.8
1.0
Se la successione ha carattere oscillante per quasi tutti i dati inizialiq > 3
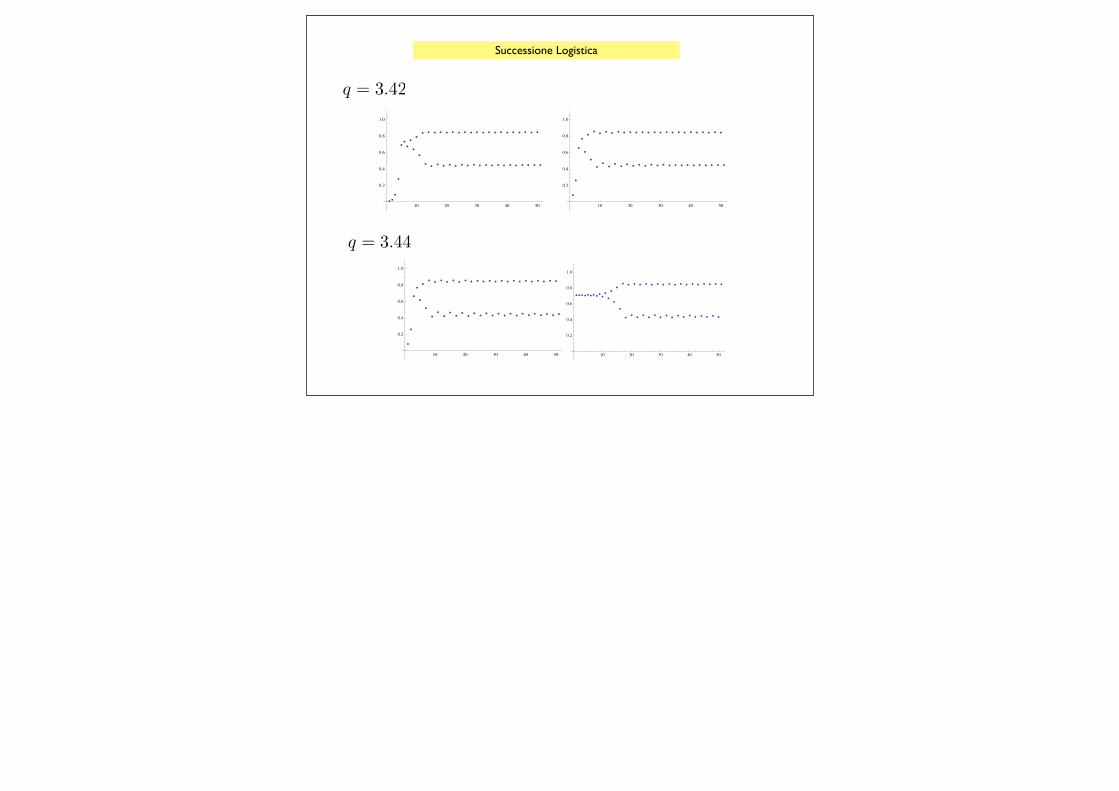
Successione Logistica
10 20 30 40 50
0.2
0.4
0.6
0.8
1.0
10 20 30 40 50
0.2
0.4
0.6
0.8
1.0
q = 3.42
10 20 30 40 50
0.2
0.4
0.6
0.8
1.0
10 20 30 40 50
0.2
0.4
0.6
0.8
1.0
q = 3.44
Successione Logistica
10 20 30 40 50
0.2
0.4
0.6
0.8
1.0
20 40 60 80 100
0.2
0.4
0.6
0.8
1.0
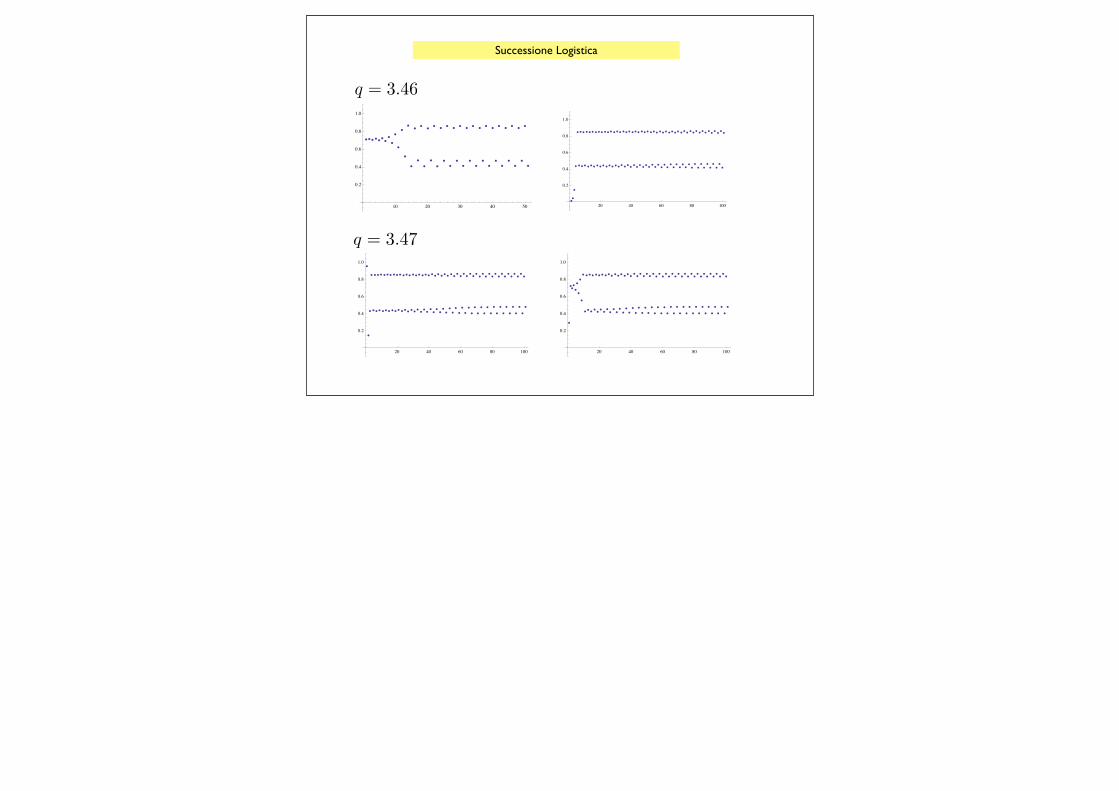
q = 3.46
20 40 60 80 100
0.2
0.4
0.6
0.8
1.0
20 40 60 80 100
0.2
0.4
0.6
0.8
1.0
q = 3.47
Successione Logistica
20 40 60 80 100
0.2
0.4
0.6
0.8
1.0
20 40 60 80 100
0.2
0.4
0.6
0.8
1.0
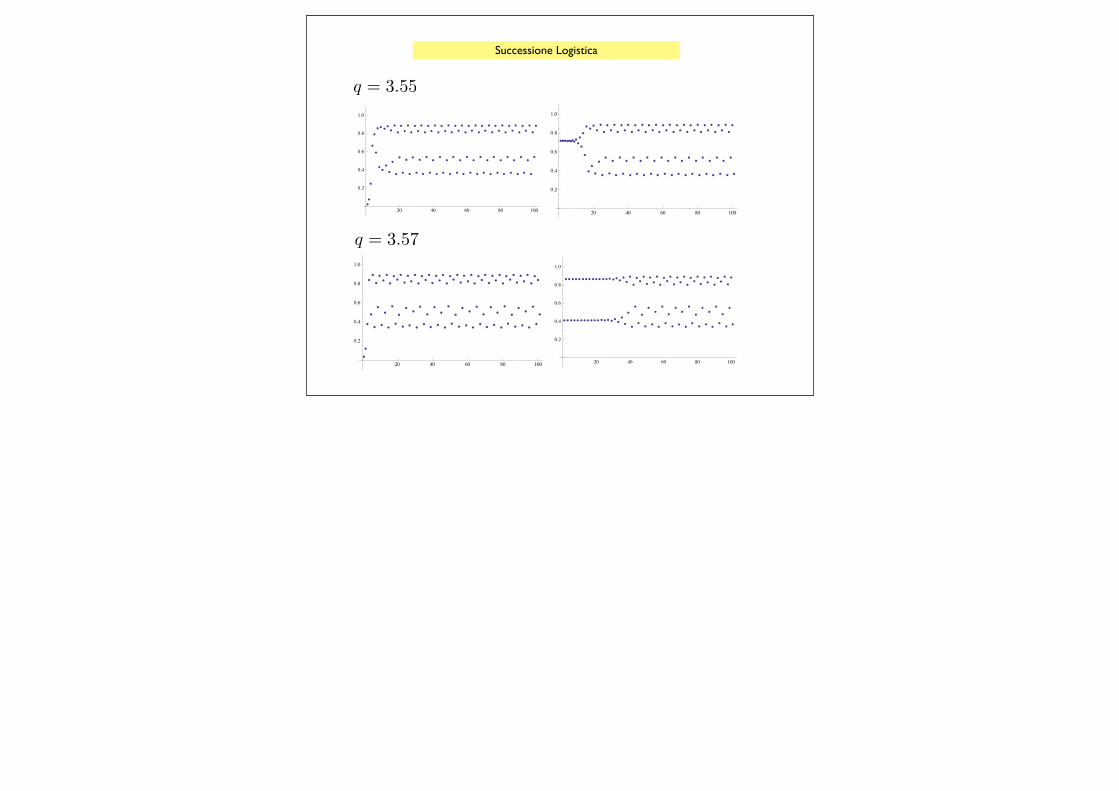
q = 3.55
20 40 60 80 100
0.2
0.4
0.6
0.8
1.0
20 40 60 80 100
0.2
0.4
0.6
0.8
1.0
q = 3.57
Successione Logistica
20 40 60 80 100
0.2
0.4
0.6
0.8
1.0
20 40 60 80 100
0.2
0.4
0.6
0.8
1.0
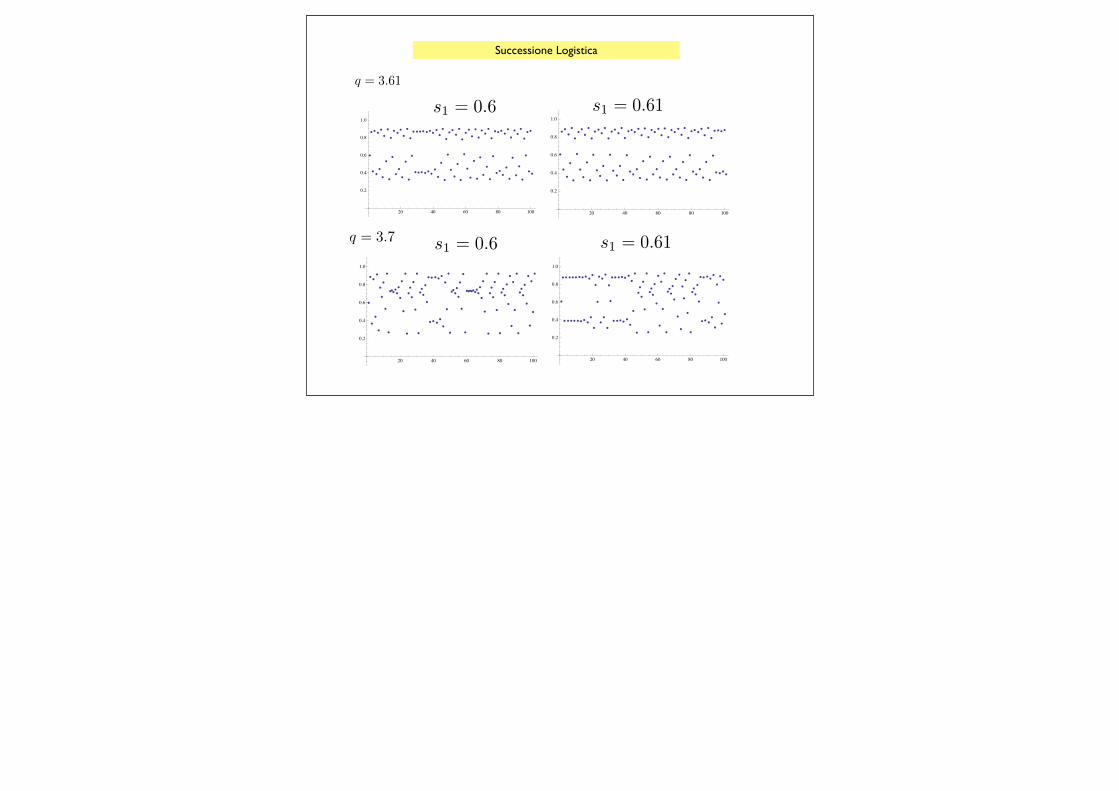
q = 3.61
s1 = 0.6 s1 = 0.61
20 40 60 80 100
0.2
0.4
0.6
0.8
1.0
20 40 60 80 100
0.2
0.4
0.6
0.8
1.0
s1 = 0.61s1 = 0.6q = 3.7
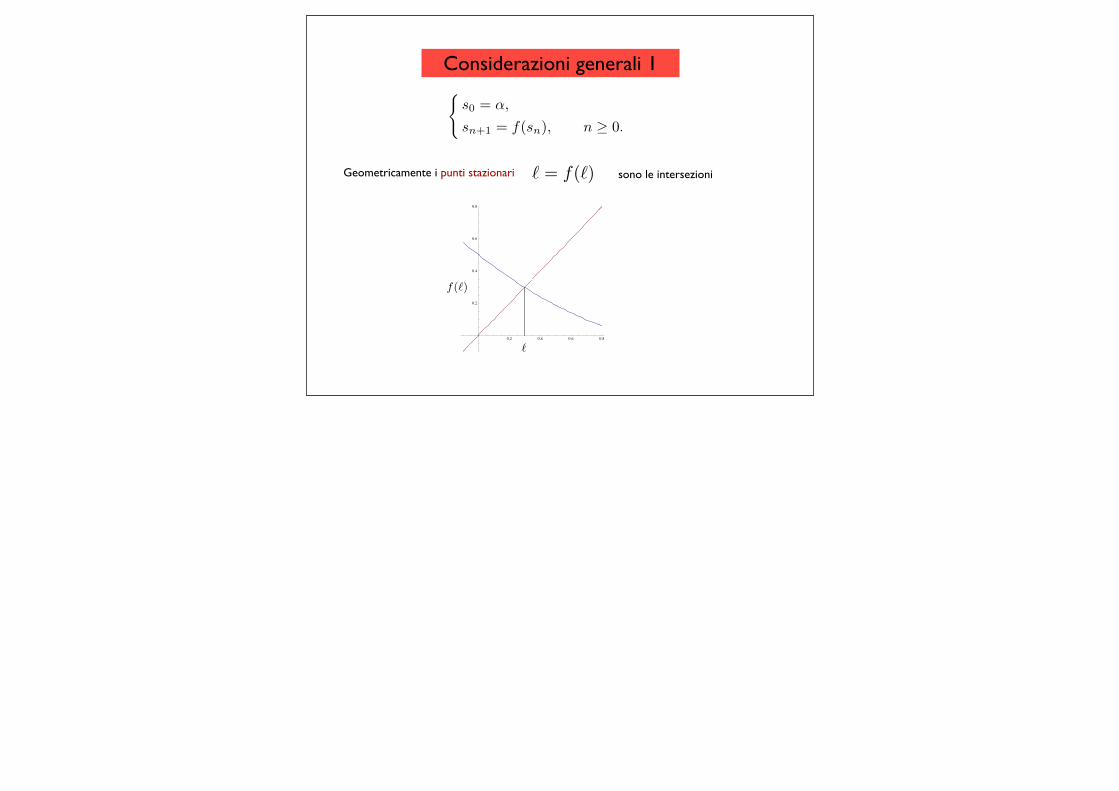
Considerazioni generali 1�s0 = α,
sn+1 = f(sn), n ≥ 0.
Se limn→∞
sn = � allora

Considerazioni generali 1�s0 = α,
sn+1 = f(sn), n ≥ 0.
Se limn→∞
sn = � allora
� = f(�)
Considerazioni generali 1�s0 = α,
sn+1 = f(sn), n ≥ 0.
I possibili limiti vanno cercati fra i punti stazionari
� = f(�)
Questo permette di “indovinare” i possibili limiti
Considerazioni generali 1�s0 = α,
sn+1 = f(sn), n ≥ 0.
Geometricamente i punti stazionari � = f(�) sono le intersezioni
0.2 0.4 0.6 0.8
0.2
0.4
0.6
0.8
�
f(�)
Considerazioni generali 1
�s0 = α,
sn+1 = f(sn), n ≥ 0.0.2 0.4 0.6 0.8
0.2
0.4
0.6
0.8
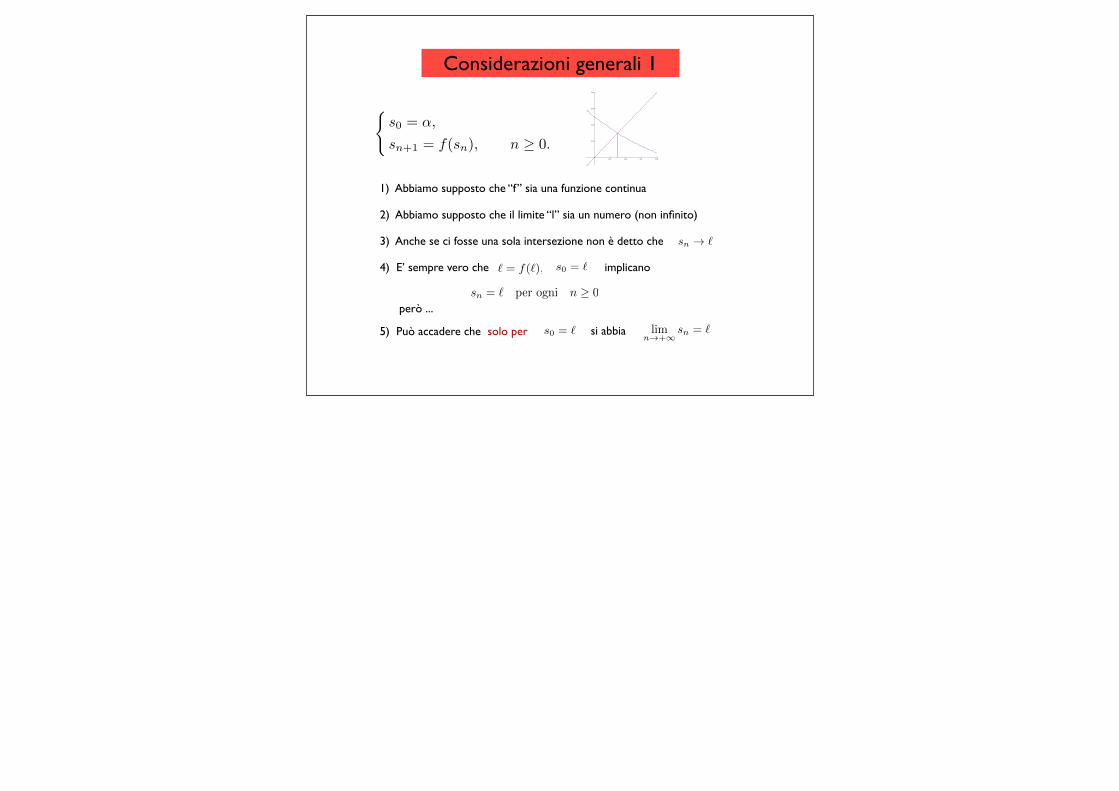
1) Abbiamo supposto che “f” sia una funzione continua
2) Abbiamo supposto che il limite “l” sia un numero (non infinito)
3) Anche se ci fosse una sola intersezione non è detto che sn → �
4) E’ sempre vero che � = f(�), s0 = � implicano
sn = � per ogni n ≥ 0però ...
5) Può accadere che solo per s0 = � si abbia limn→+∞
sn = �

Considerazioni generali 2�s0 = α,
sn+1 = f(sn), n ≥ 0.
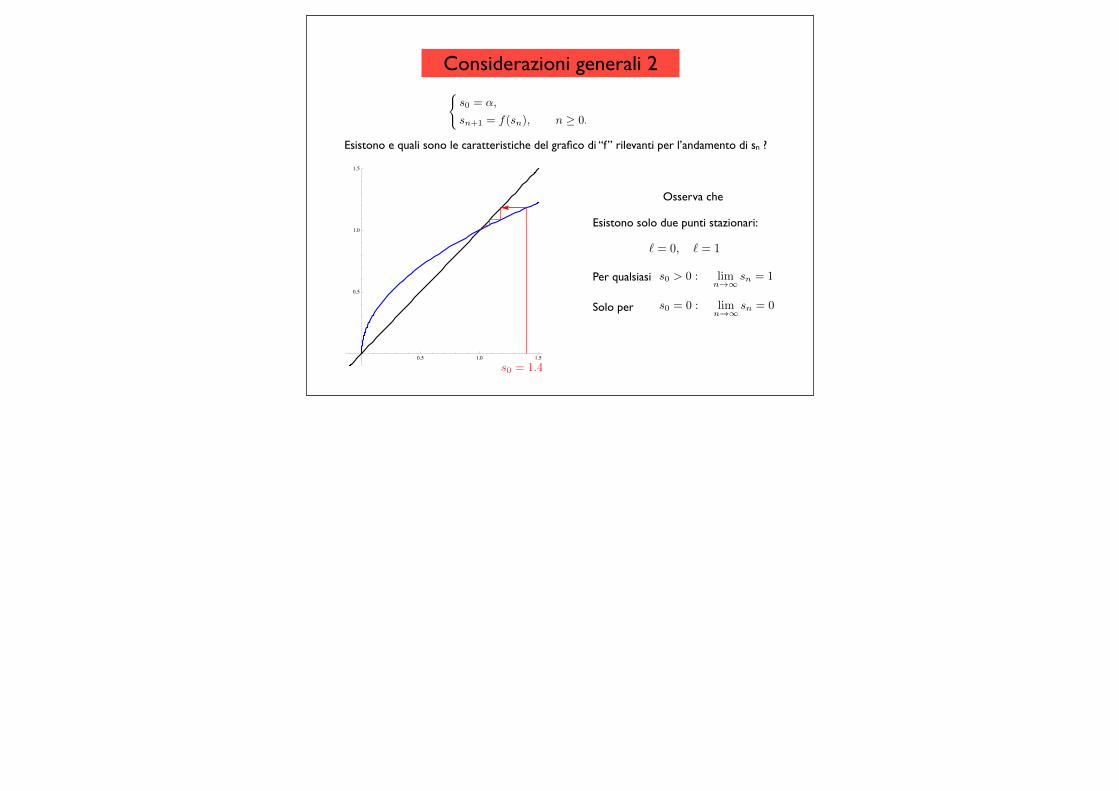
Esistono e quali sono le caratteristiche del grafico di “f” rilevanti per l’andamento di sn ?
0.5 1.0 1.5
0.5
1.0
1.5
s0
Osserva che
Esistono solo due punti stazionari:
� = 0, � = 1
Per qualsiasi s0 > 0 : limn→∞
sn = 1
Solo per s0 = 0 : limn→∞
sn = 0

Considerazioni generali 2�s0 = α,
sn+1 = f(sn), n ≥ 0.
Esistono e quali sono le caratteristiche del grafico di “f” rilevanti per l’andamento di sn ?
Osserva che
Esistono solo due punti stazionari:
� = 0, � = 1
Per qualsiasi s0 > 0 : limn→∞
sn = 1
Solo per s0 = 0 : limn→∞
sn = 0
0.5 1.0 1.5
0.5
1.0
1.5
s0 = 0.15
Considerazioni generali 2�s0 = α,
sn+1 = f(sn), n ≥ 0.
Esistono e quali sono le caratteristiche del grafico di “f” rilevanti per l’andamento di sn ?
Osserva che
Esistono solo due punti stazionari:
� = 0, � = 1
Per qualsiasi s0 > 0 : limn→∞
sn = 1
Solo per s0 = 0 : limn→∞
sn = 0
0.5 1.0 1.5
0.5
1.0
1.5
s0 = 1.4
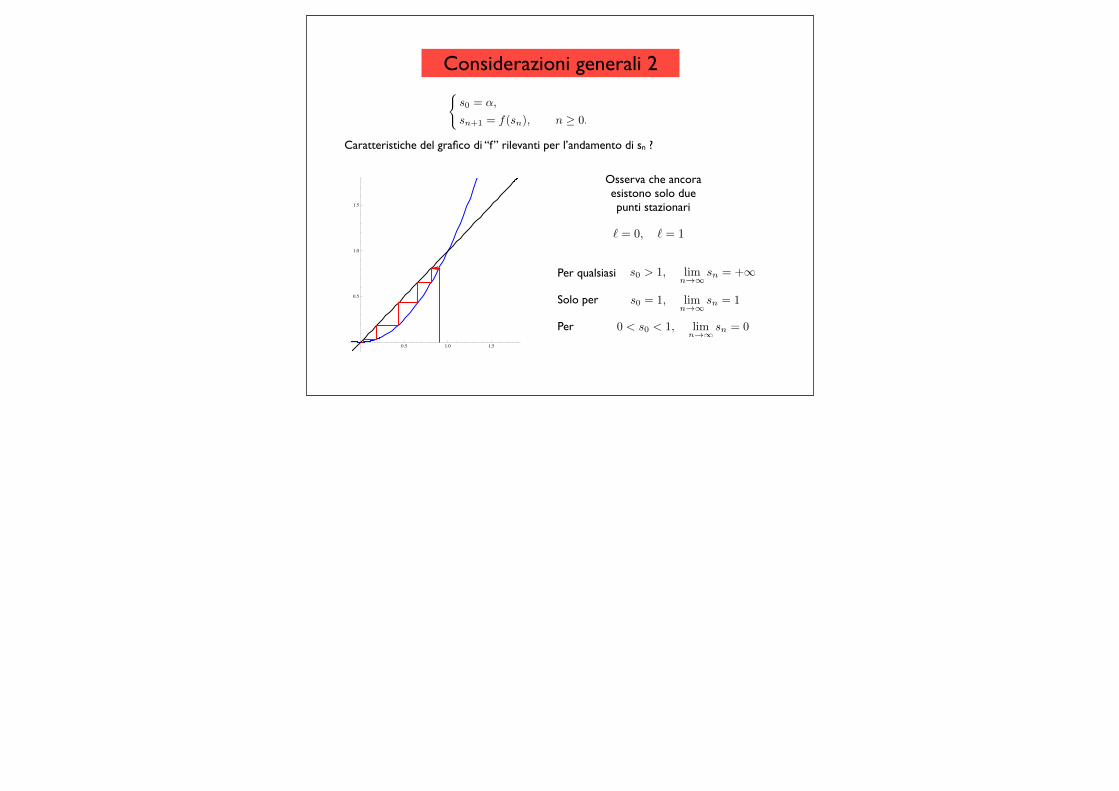
Considerazioni generali 2�s0 = α,
sn+1 = f(sn), n ≥ 0.
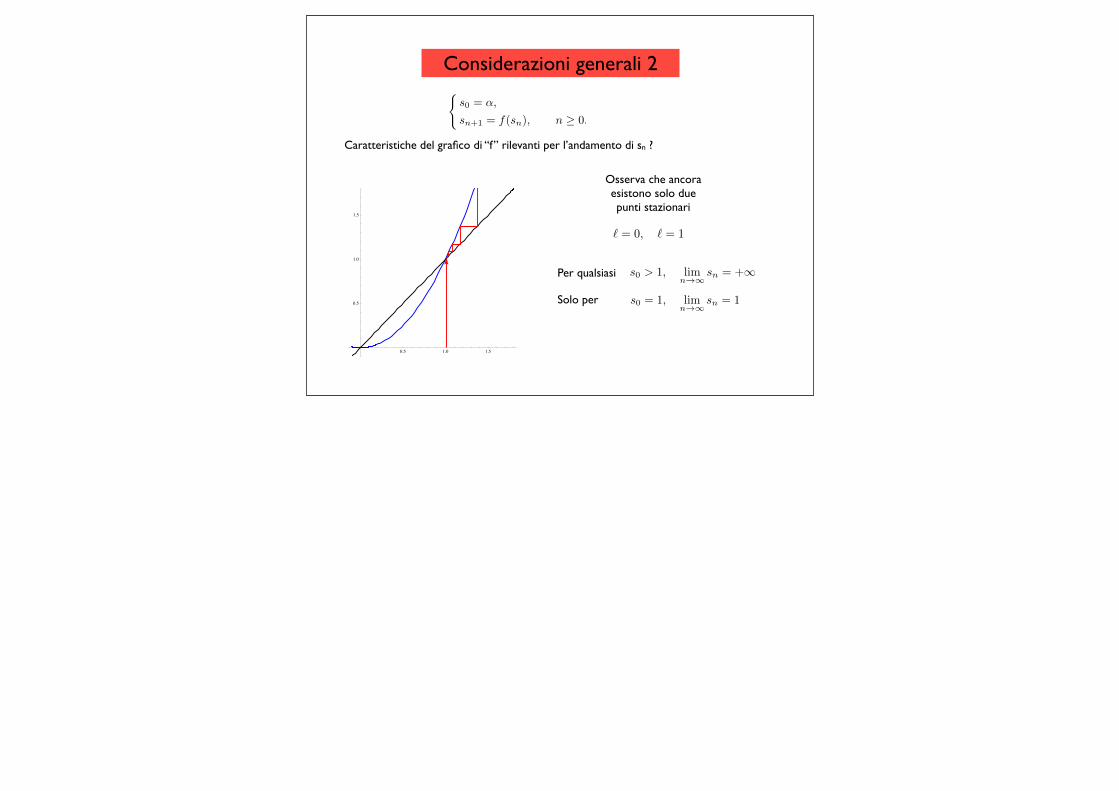
Caratteristiche del grafico di “f” rilevanti per l’andamento di sn ?
Osserva che ancora esistono solo due punti stazionari
� = 0, � = 1
Per qualsiasi
Solo per
0.5 1.0 1.5
0.5
1.0
1.5
s0 > 1, limn→∞
sn = +∞
s0 = 1, limn→∞
sn = 1
Considerazioni generali 2�s0 = α,
sn+1 = f(sn), n ≥ 0.
Caratteristiche del grafico di “f” rilevanti per l’andamento di sn ?
Osserva che ancora esistono solo due punti stazionari
� = 0, � = 1
Per qualsiasi
Solo per
s0 > 1, limn→∞
sn = +∞
s0 = 1, limn→∞
sn = 1
Per 0 < s0 < 1, limn→∞
sn = 0
0.5 1.0 1.5
0.5
1.0
1.5
Considerazioni generali 2�s0 = α,
sn+1 = f(sn), n ≥ 0.
Caratteristiche del grafico di “f” rilevanti per l’andamento di sn
0.5 1.0 1.5
0.5
1.0
1.5
0.5 1.0 1.5
0.5
1.0
1.5
0.2 0.4 0.6 0.8
0.2
0.4
0.6
0.8
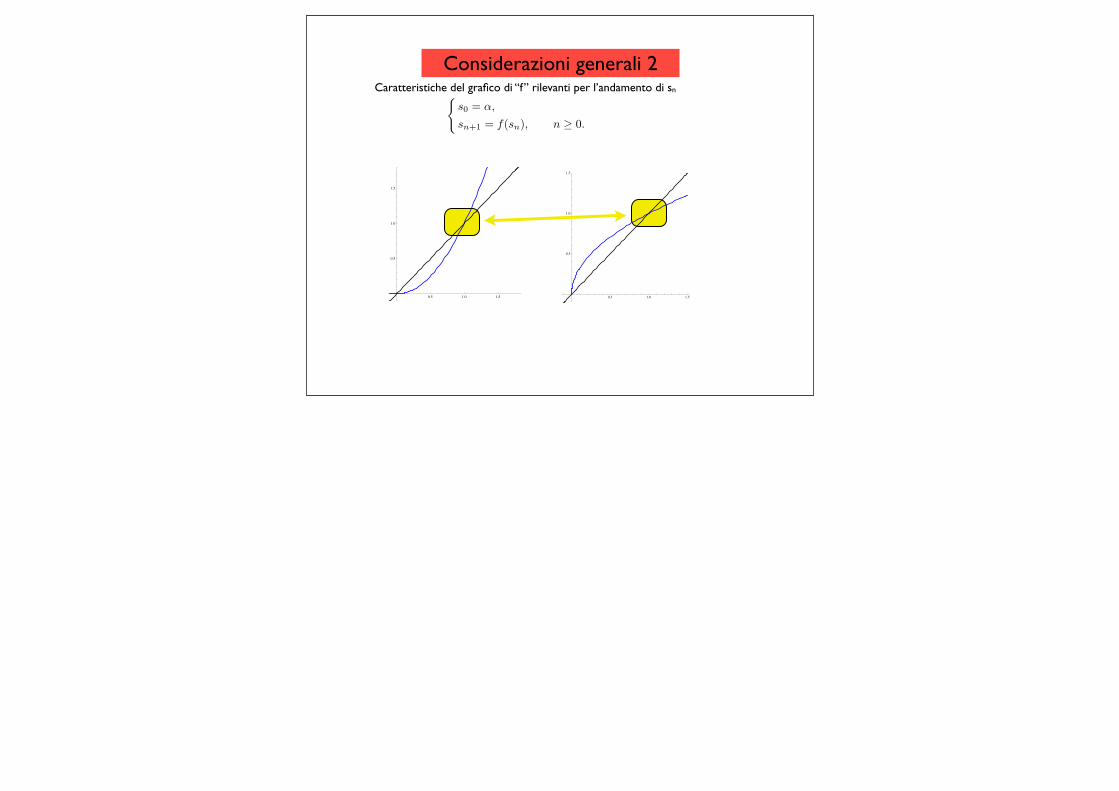
Considerazioni generali 2�s0 = α,
sn+1 = f(sn), n ≥ 0.
Caratteristiche del grafico di “f” rilevanti per l’andamento di sn
0.5 1.0 1.5
0.5
1.0
1.5
0.5 1.0 1.5
0.5
1.0
1.5
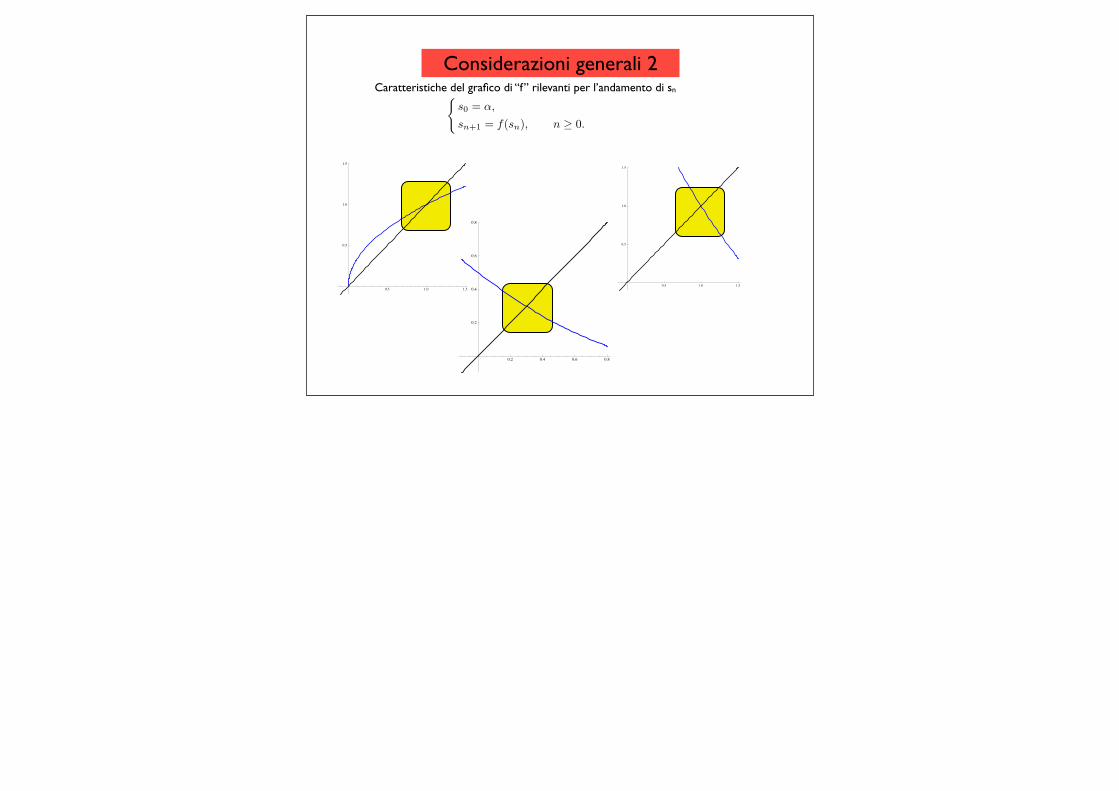
Considerazioni generali 2�s0 = α,
sn+1 = f(sn), n ≥ 0.
Caratteristiche del grafico di “f” rilevanti per l’andamento di sn
0.2 0.4 0.6 0.8
0.2
0.4
0.6
0.8
2 4 6 8 10
0.2
0.4
0.6
0.8
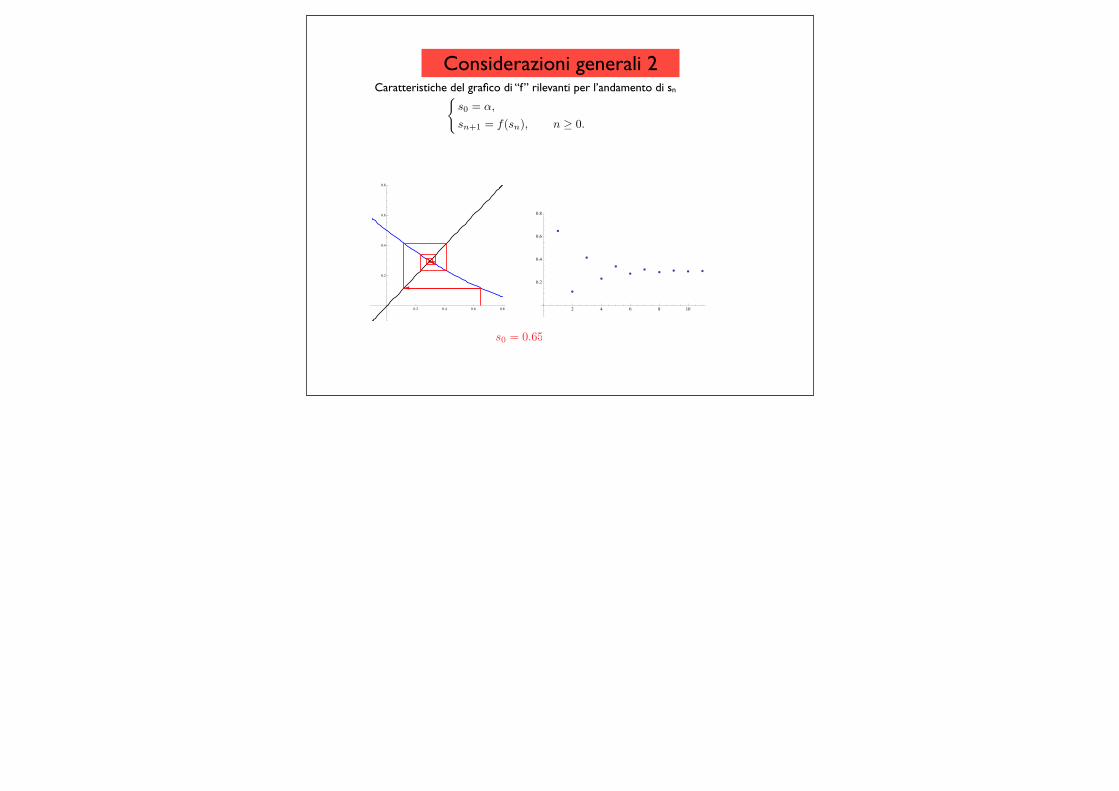
s0 = 0.65
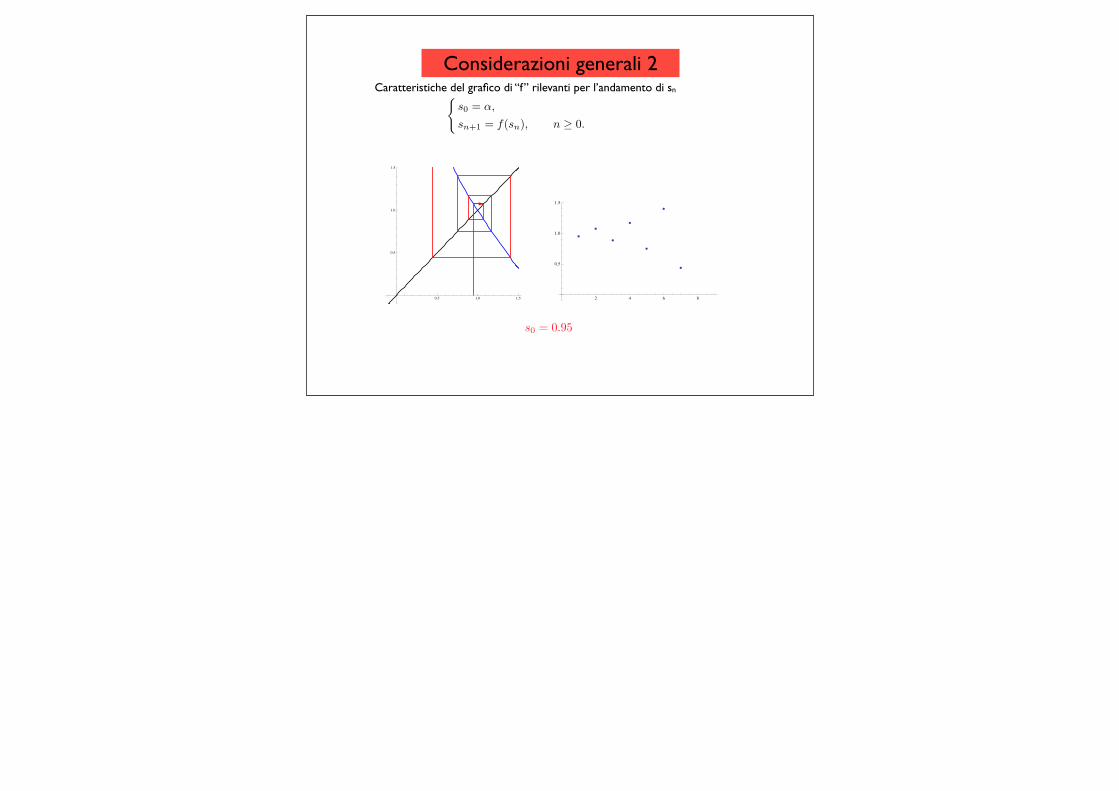
Considerazioni generali 2�s0 = α,
sn+1 = f(sn), n ≥ 0.
Caratteristiche del grafico di “f” rilevanti per l’andamento di sn
0.5 1.0 1.5
0.5
1.0
1.5
2 4 6 8
0.5
1.0
1.5
s0 = 0.95
Recommended


![[pt. 2] LinkedIn per Laureandi e Laureati 2015 a UniTN || LinkedIn for Young Graduates 2015 @UniTN](https://img.pdfslide.tips/doc/110x75/55adb6311a28ab707f8b464d/pt-2-linkedin-per-laureandi-e-laureati-2015-a-unitn-linkedin-for-young-graduates-2015-unitn.jpg)














