CENTRO DE INVESTIGACIÓN EN MATEMÁTICAS, A.C.
“Segmentación de Zonas Urbanas enImágenes de Satélite”
Proyecto Tecnológico
Maestría en Ciencias con Especialidad en Computación y Matemáticas Industriales
Yolanda de Lira Domínguez
Director de Proyecto
Dr. José Luis Marroquín Zaleta
Enero del 2004 Guanajuato, Gto, México

Contenido
Capítulo 1 Introducción ....................................................................................... 4
Capítulo 2 Percepción Remota............................................................................ 7
2.1. Introducción .................................................................................................. 7
2.2. Fundamentos de Percepción Remota......................................................... 10
2.3. Radiación electromagnética........................................................................ 11
2.4. El espectro electro – magnético.................................................................. 12
2.5. El programa Landsat................................................................................... 16
2.6. Morfología urbana....................................................................................... 18
Capítulo 3 Tratamiento digital de imágenes ..................................................... 19
3.3. Cálculo de estadísticas e histograma de la imagen.................................... 20
3.4. Realces y mejoras de la imagen................................................................. 203.4.1. Expansión lineal.............................................................................................................. 22
3.4.2. Ecualización del histograma........................................................................................... 22
3.4.3. Expansión especial del contraste ................................................................................... 22
3.4. Composiciones en color.............................................................................. 23
3.5. Cambios de escala ..................................................................................... 24
Capítulo 4 El proceso de clasificación .............................................................. 26
4.1. Clasificador de mínima distancia euclidiana ............................................... 26
4.2. Clasificador de mínima distancia de Mahalanobis ...................................... 28
4.3. Operadores morfológicos............................................................................ 29
Conclusiones y trabajo futuro............................................................................ 31
Conclusiones generales..................................................................................... 31
Trabajo futuro .................................................................................................... 31
Apéndice A. Manual de Usuario del software PROCIS .................................. 32
A.1. Pantalla principal ........................................................................................ 32
A.2. Dimensiones del archivo ............................................................................ 33
A.3. Selección de la combinación de color ........................................................ 33

A.4. Dimensiones de la imagen ........................................................................ 34
A.5. Lectura de archivo..................................................................................... 34
A.6. Zoom, selección y marcado........................................................................ 35
A.7. Realces ...................................................................................................... 36
A.8. Histograma y estadísticas .......................................................................... 37
A.9. Cambios de escala ..................................................................................... 39
A.10. Clasificación de zonas urbanas................................................................ 39
A.11. Operadores morfológicos ......................................................................... 40
Bibliografía........................................................................................................... 42

Capítulo 1 Introducción
La motivación del presente trabajo es proveer de una herramienta que permita
visualizar y procesar imágenes de satélite de una manera sencilla, así como
realizar segmentación de dichas imágenes en zonas urbanas y no urbanas.
El problema de segmentación de imágenes puede verse como uno de
clasificación, en el cual es necesario determinar un campo de etiquetas que
particiona la imagen en regiones mutuamente excluyentes { }kRR ,...,1 , así como
determinar el conjunto de parámetros que definen a dichas regiones. Siempre
existe un atributo de interés para realizar esta tarea (nivel de gris, profundidad,
color, movimiento, textura, etc. ). En muchas ocasiones lo es el nivel de gris por lo
que los parámetros que definen las regiones de la imagen son generalmente la
media y la varianza de dicho atributo.
En el contexto de percepción remota [1], el problema de segmentación es
meramente un problema de clasificación, de hecho , quienes se dedican al
tratamiento de imágenes de percepción remota se refieren a segmentar como
recortar una imagen; para la mayor parte de estos usuarios, la clasificación
supone la fase culminante del tratamiento digital de imágenes. Los Números
Digitales (ND) adquiridos por el sensor remoto no tienen sentido en sí mismos
hasta que son interpretables, es decir, hasta que son etiquetados en categorías
que supongan un conocimiento del territorio.
El tratamiento digital se inicia con las correcciones de la imagen. Con este nombre
se indican aquellos procesos que tienden a eliminar cualquier anomalía detectada
en la imagen, ya sea en su localización, o en los ND de los píxeles que la
componen. Estas operaciones tienden a disponer los datos en la forma más
cercana posible a una adquisición idónea en la posición de los píxeles. Por
corrección se entiende solventar algún defecto en la adquisición, emisión o
recepción de la imagen.

Cualquier imagen adquirida por un sensor remoto, ya sea aéreo o espacial,
presenta una serie de alteraciones radiométricas y geométricas debidas a muy
variados factores. Esto explica que la imagen finalmente detectada no coincida
exactamente con el tono-posición-forma-tamaño de los objetos que incluye. En el
caso concreto de las imágenes espaciales, las deformaciones más frecuentes
pueden agruparse en cuatro apartados:
- Distorsiones originadas por la plataforma. Pese a la gran estabilidad de un
satélite de observación, muy superior a la que ofrece un avión, pueden
producirse pequeñas variaciones en la altitud de su órbita, en su velocidad,
o en la orientación de cualquiera de sus tres ejes: aleteo, cabeceo o giro
lateral, las cuales producen distorsiones de distinto tipo.
- Distorsiones provocadas por la rotación terrestre. Teniendo en cuenta la
altitud orbital de las plataformas espaciales, el efecto de rotación de la tierra
aparece claramente en la imagen.
- Distorsiones provocadas por el sensor. Los sensores de barrido electrónico
realizan una exploración perpendicular a la trayectoria del satélite, gracias a
un espejo oscilante que envía la radiancia detectada a una cadena de
detectores sólidos. Este movimiento de barrido puede alterarse por
anomalías del sensor, provocando un efecto de barrido no lineal o cambios
en el intervalo de recolección de información.
- Distorsiones provocadas por la atmósfera. Los distintos elementos que
componen la atmósfera causan una modificación de la radiancia original
proveniente de la superficie terrestre. El efecto más importante es el de
dispersión, provocado por la presencia de aerosoles, gases y vapor de
agua, que implica un aumento de la señal recibida por el sensor.

Algunos de estos problemas se solventan rutinariamente en los centros
encargados de la percepción o venta de las imágenes, otros, sin embargo,
persisten haciendo necesarias una serie de técnicas de ajuste.
El siguiente paso del tratamiento digital consiste en definir las categorías en forma
digital con una fase de entrenamiento supervisado, no supervisado o una
combinación de ambos y luego se etiqueta cada píxel de la imagen en una de
esas categorías, a lo cual se le conoce como fase de asignación. Finalmente se
realiza la comprobación y verificación de resultados.
En el capítulo 2 se encuentran algunos conceptos importantes para la
interpretación de firmas espectrales y ciertas características del satélite LANDSAT
TM. En el capítulo 3 se explican algunas transformaciones para el tratamiento
digital de imágenes. Los métodos empleados para las fases de entrenamiento y
asignación se plantean en el capítulo 4, así como algunos resultados. Luego se
dan las conclusiones y trabajo futuro del proyecto tecnológico.
Finalmente, el apéndice A es un manual de usuario, donde se explica el manejo
del software desarrollado (PROCIS) para realizar segmentaciones de zonas
urbanas de imágenes del satélite LANDSAT TM. Utilizando los métodos descritos
en el capítulo 2.

Capítulo 2 Percepción Remota
2.1. Introducción
Volar ha sido, desde épocas muy remotas, uno de los sueños más intensamente
anhelados por la Humanidad. Pese a la persistencia del intento, sólo en fechas
recientes el hombre ha dispuesto de los medios técnicos necesarios para hacer
realidad este deseo [1].
Uno de los principales acicates de esta aventura aérea ha sido la búsqueda de
una nueva visión de los paisajes terrestres. El afán de remontar la limitada
perspectiva de la visión humana es evidente ya desde los inicios de la
aeronáutica, llegando a ser, hoy en día, una pieza clave de la investigación
espacial.
Esa observación remota de la superficie terrestre constituye el marco de estudio
de la percepción remota (remote sensing). En sentido amplio, la percepción
remota no engloba sólo procesos que permiten obtener una imagen desde el aire
o el espacio, sino también su posterior tratamiento, en el contexto de una
determinada aplicación.
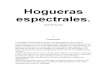
En definitiva, un sistema de percepción remota incluye los siguientes elementos:
- Fuente de energía, que supone el origen del flujo energético detectado por
el sensor. La fuente de energía más importante, obviamente, es la energía
solar.
- Cubierta terrestre, formada por distintas masas de vegetación, suelos, agua
o construcciones humanas, que reciben la señal energética procedente de
la fuente de energía y la reflejan o emiten de acuerdo a sus características
físicas.

Fig. 2.1. Componentes de un sistema de percepción remota (Chuvieco, 1992)
- Sistema sensor, compuesto por el sensor, propiamente dicho, y la
plataforma que lo sustenta. Tiene como misión captar la energía procedente

de las cubiertas terrestres, codificarla y grabarla o enviarla directamente al
sistema de recepción.
- Sistema de recepción-comercialización, en donde se recibe la información
transmitida por la plataforma, se graba en un formato apropiado y, tras las
oportunas correcciones, se distribuye a los intérpretes.
- Intérprete, que analiza esa información convirtiéndola en una clave temática
o cuantitativa, orientada a facilitar la evaluación del problema en estudio.
- Usuario final, encargado de analizar el documento fruto de la interpretación,
así como de dictaminar sobre las consecuencias que de él se deriven.
La distancia con respecto a la cubierta terrestre, a la cual se coloca la plataforma,
permite tener una visión sinóptica a diferentes escalas del paisaje, lo que se logra
gracias a una sucesión de observaciones que van cubriendo poco a poco la región
deseada. Éstas pueden hacerse, en general a diferentes horas del día, en
diferentes épocas del año y, muy probablemente, por medio de diferentes filtros de
color. En el proceso se genera una gran cantidad de datos, los que analizados
adecuadamente por medio de criterios muy bien definidos, proporcionan valiosa
información acerca de los recursos naturales terrestres y sientan las bases para su
estudio racional.
Con el desarrollo moderno de las ciencias de la computación se ha dado un auge
importante a la percepción remota, pues la disponibilidad de estas herramientas
permite la evaluación cuantitativa de un gran volumen de datos. Así, en una
simbiosis muy estrecha, las ciencias de la computación ha impulsado el desarrollo
de la percepción remota, y ésta, a su vez, ha generado nuevos sistemas de
procesamiento digital con propósitos específicos [2].

En este capítulo veremos algunos factores que permiten la interpretación rigurosa
de la imagen obtenida por el sensor remoto y algunas características del satélite
LANDSAT TM.
2.2. Fundamentos de Percepción Remota
Anteriormente se definió la percepción remota como aquella técnica que nos
permite obtener información a distancia de los objetos situados sobre la superficie
terrestre. Para que esta observación remota sea posible, es preciso que entre los
objetos y el sensor exista algún tipo de interacción. Nuestros sentidos perciben un
objeto sólo cuando pueden descifrar la información que éste les envía. Por
ejemplo, somos capaces de ver un árbol porque nuestros ojos reciben y traducen
convenientemente una energía luminosa procedente del mismo. Esa señal,
además, no es originada por el árbol, sino por un foco energético exterior que le
ilumina. De ahí que no seamos capaces de percibir ese árbol en plena oscuridad.
Este ejemplo sirve para introducir los tres principales elementos de cualquier
sistema de percepción remota: sensor (nuestro ojo), objeto observado (árbol) y
flujo energético que permite poner a ambos en relación. En el caso del ojo, ese
flujo procede del objeto por reflexión de la luz solar,. Podría también tratarse de un
tipo de energía emitida por el propio objeto, o incluso por el sensor. Estas son,
precisamente, las tres formas de adquirir información a partir de un sensor remoto:
por reflexión, por emisión y por emisión-reflexión.
La primera de ellas es la forma más importante de percepción remota, pues se
deriva directamente de la luz solar, principal fuente de energía de nuestro Planeta.
El sol ilumina la superficie terrestre, que refleja esa energía en función del tipo de
cubierta presente sobre ella. Ese flujo reflejado se recoge por el sensor, que lo
transmite posteriormente a las estaciones receptoras. Entre superficie y sensor se
interpone la atmósfera, que dispersa y absorbe parte de la señal original. De igual

forma, la observación remota puede basarse en la energía emitida por las propias
cubiertas, o en la que podríamos enviar desde un sensor que fuera capaz, tanto
de generar su propio flujo energético, como de recoger posteriormente su reflexión
sobre la superficie terrestre [1].
Fig. 2.2. Formas de percepción remota (Chuvieco, 1992)
En cualquiera de estos casos, el flujo energético entre la cubierta terrestre y el
sensor constituye una forma de radiación electro-magnética. Como es sabido, la
energía térmica se transfiere de un lugar a otro por tres procesos: convección,
conducción, y radiación. De ellos, nos interesa este último, ya que constituye la
base de los sistemas de percepción remota que se analizan en este trabajo.
2.3. Radiación electromagnética
Las propiedades de la radiación electro-magnética se han explicado por dos
teorías aparentemente contrapuestas: aquella que la concibe como un haz
ondulatorio (Huygens, Maxwell), y aquella otra que la considera como una
sucesión de unidades discretas de energía, fotones o cuantos, con masa igual a
cero (Plank, Einstein). Actualmente, parece que ambas teorías se pueden
compaginar, pues se ha demostrado que la luz puede comportarse de acuerdo a
ambos planteamientos [1].

De acuerdo con la teoría ondulatoria, la energía electro-magnética se transmite de
un lugar a otro siguiendo un modelo armónico y continuo, a la velocidad de la luz y
conteniendo dos campos de fuerzas ortogonales entre sí: eléctrico y magnético.
Las características de este flujo energético pueden describirse por dos elementos:
longitud de onda (λ ) y frecuencia ( F ). La primera hace referencia a la distancia
entre dos picos sucesivos de una onda mientras que la frecuencia designa el
número de ciclos pasando por un punto fijo en una unidad de tiempo. Ambos
elementos están inversamente relacionados, como describe la siguiente fórmula:
Fc λ= [2.1]
donde c indica la velocidad de la luz ( smx /103 8 ), λ expresa la longitud de onda y
F la frecuencia (Hz, ciclos por segundo). Luego, la radiación en longitudes de
onda largas es más difícil de detectar que aquella centrada en longitudes cortas,
de ahí que las primeras requieran más sofisticados medios de detección.
2.4. El espectro electro – magnético
Cualquier tipo de energía radiante puede describirse en función de su longitud de
onda o frecuencia. Aunque la sucesión de valores de longitud de onda es
continua, suelen establecerse una serie de bandas en donde la radiación electro-
magnética manifiesta un comportamiento similar. La organización de estas bandas
de longitudes de onda o frecuencia se denomina espectro electro-magnético (Fig.
2.3). Comprende, en un continuo, desde las longitudes de onda más cortas (rayos
gamma, rayos X), hasta las kilométricas (telecomunicaciones). Las unidades de
medida más comunes se relacionan con la longitud de onda. Para las más cortas
se utilizan micras ( 610−=mµ metros), mientras las más largas se miden en
centímetros o metros. Normalmente a éstas últimas (denominadas micro-ondas)
se les designa también por valores de frecuencia (en gigahercios, Hz810 GHz = ).

Fig. 2.3. Espectro Electro-magnético (Chuvieco, 1992)
Desde el punto de vista de percepción remota, conviene destacar una serie de
bandas espectrales, que son las más frecuentemente empleadas con la tecnología
actual. Su denominación y amplitud varían según distintos autores. La
terminología más común es la siguiente:
- Espectro visible (0.4 a 0.7 mµ ). Se denomina sí por tratarse de la única
radiación electro-magnética que pueden percibir nuestros ojos, coincidiendo
con las longitudes de onda en donde es máxima la radiación solar. Suelen
distinguirse tres bandas elementales, que se denominan azul (0.4 a 0.5
mµ ) ; verde (0.5 a 0.6 mµ ), y rojo (0.6 a 0.7 mµ ), en razón de los colores
elementales asociados a esas longitudes de onda.
- Infrarrojo próximo (0.7 a 1.3 mµ ). A veces se denomina también infrarrojo
reflejado y fotográfico, puesto que puede detectarse a partir de films
dotados de emulsiones especiales. Resulta de especial importancia por su

capacidad para discriminar masas vegetales u concentraciones de
humedad.
- Infrarrojo medio (1.3 a 8 mµ ), en donde se entremezclan los procesos de
reflexión de la luz solar y de emisión de la superficie terrestre.
- Infrarrojo lejano o térmico (8 a 14 mµ ), que incluye la porción emisiva del
espectro terrestre.
- Micro-ondas (a partir de 1mm), con gran interés por ser un tipo de energía
bastante transparente a la cubierta nubosa.
Teniendo en cuenta que el flujo incidente sobre una superficie siempre es
reflejado, transmitido o absorbido y que la proporción del flujo incidente que es
reflejado, absorbido y transmitido depende de las características de dicha
superficie, nos resulta interesante conocer el comportamiento de dicha cubierta en
diferentes longitudes de onda, ya que esa proporción varía en distintas bandas del
espectro. Esto, de cara a realizar una más atinada discriminación, puesto que sólo
cuando existan divergencias espectrales entre dos superficies podrán éstas
separarse adecuadamente.
Fig. 2.4. Relación entre el flujo incidente y reflejado (Chuvieco, 1992)

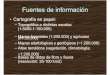
A partir de medidas de laboratorio, se han obtenido unas curvas de reflectividad
espectral (relación que existe entre el flujo incidente y el reflejado por la superficie)
para las principales cubiertas terrestres (Fig. 2.5.).
Como puede observarse, algunas tienden a presentar una respuesta uniforme en
distintas longitudes de onda, mientras que otras ofrecen un comportamiento
mucho más selectivo [1].
Fig. 2.5. Signaturas espectrales típicas de distintas cubiertas. (Chuvieco, 1992)
La nieve presenta una reflectividad alta y constante, pues refleja la mayor parte de
la energía incidente a distintas longitudes de onda. Por el contrario, el agua
absorbe la mayor parte de la energía que recibe, tanto más según nos situamos
en longitudes de onda mayores. Por su parte, la vegetación presenta un
comportamiento muy cromático, con bajos valores de reflectividad en el espectro
visible y más elevados en el infrarrojo cercano.

2.5. El programa Landsat
Gracias a los resultados proporcionados por las primeras fotografías espaciales, la
agencia espacial norteamericana diseñó a fines de los 60 el primer proyecto
dedicado sólo a la observación de los recursos terrestres. Fruto de estos trabajos
fue la puesta en órbita del primer satélite de la serie ERTS (Earth Resource
Tecnollogy Satellite) el 23 de julio de 1972. Esta familia de satélites, fue
posteriormente denominada Landsat en 1975.
Landsat puede producir imágenes de todas las partes de la superficie terrestre sin
pedir permisos de los gobiernos y ofrece las imágenes a todos los que se
interesen en ellas a precios uniformes. Landsat suministró la primera base de
datos de la tierra completa con resoluciones espaciales y espectrales adecuadas
para varias aplicaciones. Los datos de Landsat están disponibles en forma digital.
Los satélites de Landsat de la primera generación: Landsat 1, 2 y 3 fueron
colocados en sus órbitas en los años 1972, 1975 y 1978. La segunda generación
de Landsat se constituye de dos satélites: Landsat 4 y 5, lanzados en 1982 y
1984. La principal aportación de estos satélites es la incorporación de un nuevo
sensor denominado Thematic Mapper (TM), especialmente diseñado para la
cartografía temática. Este sensor mejora su antecesor Multiespectral Scanner
(MSS) principalmente en los siguientes aspectos: pasa de 79 a 30 metros su
resolución espacial, incrementa la resolución espectral de 4 a 7 bandas, y la
resolución radiométrica pasa de 6 a 8 bits.
Las mejoras que ofrece el tensor TM facilitan una mayor precisión para la
cartografía temática, ampliando el rango de aplicaciones operativas tanto terrestre
como marinas. En 1993 se intentó poner en órbita el satélite Landsat 6 pero el
intento falló. El último satélite de esta familia, el Landsat 7, fue lanzado el 10 de
abril de 1999 y se caracteriza por una combinación de cobertura sinóptica, por alta
resolución espacial con bandas correspondientes a la observación visible del
infrarrojo y por una banda adicional pancromática de 15 m de resolución y un

rango espectral cubriendo el verde infrarrojo cercano. El Thematic Mapper (TM)
detecta las bandas espectrales de 1 a 7. A continuación se muestran las
características de cada banda. Por su resolución espacial gruesa (120 m) la banda
6 se utiliza rara vez, pero es adecuada para un levantamiento térmico.
Banda Longitud de onda
(en mµ )
Región del Espectro Características
1 0.45 – 0.52 Azul Penetración máxima por agua,
adecuada para la distinción
entre suelo y vegetación
2 0.52 – 0.60 Verde Delinea la reflectividad de la
vegetación
3 0.63 – 0.69 Rojo Delinea una banda de absorción
de clorofila importante para
distinguir tipos de vegetación
4 0.76 – 0.90 Infrarrojo cercano Adecuada para determinar el
contenido en biomasa y para el
mapeo de líneas de ribera
5 1.55 – 1.75 Infrarrojo medio Indica el contenido de agua en
suelos y vegetación; penetra
nubes delgadas, presenta
distintos tipos de vegetación en
contrastes diferentes
6 10.4 – 12.5 Infrarrojo térmico Imágenes nocturnas son
adecuadas para un mapeo
térmico y para estimar el
contenido de agua en los suelos
7 2.08 – 2.35 Infrarrojo medio Coincide con la banda de
absorción causada por iones
hidróxilos en minerales
Tabla 2.1. Características del Thematic Mapper

2.6. Morfología urbana
Teniendo en cuenta la gran complejidad espacial del fenómeno urbano, en donde
conviven actividades muy variadas sobre un reducido espacio, la aplicación de la
percepción remota a estos ámbitos es reciente y aún limitada. El principal
problema radica en la resolución espacial de los sensores espaciales,
excesivamente groseros para aportar nueva información sobre el entramado
urbano. (Welch, 1982).
Pese a esto, se cuenta con algunos estudios de aplicación que permiten mejorar
nuestra información sobre áreas remotas, en donde la cartografía disponible es
inadecuada. Trabajos de este tipo son los emprendidos, a partir de interpretación
visual, sobre Nigeria (Olorunfemi, 1987; Adeniyi, 1987) o China (Lo y Welch,
1977). Incluso en países más desarrollados, la cartografía de zonas urbanas
ofrece importantes problemas de actualización, debido al dinamismo que
normalmente ofrecen. La cobertura temporal de las imágenes espaciales estimula
su empleo en tareas de actualización, ya sea de los límites censales (Dietrich y
Lachowski, 1978), o del espacio edificado (Carter y Stow, 1979; Welch, 1980). A
partir de imágenes TM o SPOT, esta aplicación puede resultar cada vez más
viable.
Un poco más refinado resultaría el análisis de la imagen para inferir rasgos de la
morfología urbana. Los criterios empleados, en este caso, serían el tono, color y la
textura. A partir del primero puede deducirse la densidad de edificación, por
cuanto aquellas zonas que alberguen menor influencia del trazado viario ofrecerán
un tinte más oscuro. Asimismo, el tono indica si la zona cuenta o no con espacios
verdes, bien sea continuos (manchas uniformes), bien discontinuos (tinte rojo
salpicado en medio de los azules propios de la edificación). En cuanto a la
textura, indica el grado de mezcolanza propio de un determinado sector. A partir
de estos dos criterios, puede ensayarse una delimitación de sectores morfológicos
en una zona urbana.

Capítulo 3 Tratamiento digital de imágenes
El proceso de adquisición de una imagen digital difiere, sustancialmente, del
empleado en la fotografía aérea. Como es sabido, en cualquier sistema
fotográfico, la energía procedente de los objetos se registra sobre una superficie
sensible a la luz. Esta puede componerse de una o varias capas, formando,
respectivamente, una película pancromática o en color.
En el caso de los equipos óptico – electrónicos, no existe una superficie sólida de
grabación. El sensor explora secuencialmente la superficie terrestre, adquiriendo,
a intervalos regulares, la radiación que proviene de los objetos sobre ella situados.
La cadencia con la que el sensor realiza ese muestreo de la superficie terrestre
define precisamente la resolución espacial del mismo. Dicho en otras palabras, el
sensor detecta la radiancia media de una parcela del terreno equivalente al
tamaño del píxel, unidad visual más pequeña que aparece en la imagen. En
consecuencia, cada píxel de la imagen viene definido por un número entero,
traducción de la radiancia percibida por el sensor para una determinada parcela de
la superficie terrestre y en una determinada banda del espectro. Este valor
numérico se denominará, a partir de aquí, Nivel Digital (ND).
Teniendo presente esto, la organización de los datos en una imagen digital puede
hacerse en una matriz numérica de tres dimensiones. Las dos primeras
corresponden a las coordenadas geográficas de la imagen, mientras que la tercera
indica su dimensión espectral.
Con ese carácter matricial de cualquier imagen numérica, son más fácilmente
comprensibles las posteriores transformaciones aplicadas sobre ella. Estas son en
muchos casos, operaciones estadísticas comunes a otras matrices numéricas.

A continuación se presentan algunas operaciones realizadas a las imágenes de
satélite.
3.3. Cálculo de estadísticas e histograma de la imagen
Como se indicó anteriormente, cualquier operación aplicada sobre la imagen parte
de su carácter digital. Por tanto, conviene conocer las estadísticas elementales
que la definen, cara a su mejor interpretación y a orientar los posteriores procesos
de realce visual o transformación.
Por estas razones, cualquier sistema de tratamiento digital debe ofrecer opciones
para calcular estas estadísticas de la imagen, al menos de las medidas de
tendencia central o dispersión más habituales. Estas medidas nos permitirán una
primera valoración sobre el carácter de cada una de las bandas y su grado de
homogeneidad.
Además de estos valores medios, también resulta de gran interés contar con el
histograma de frecuencias de cada banda, puesto que nos informa sobre cómo se
distribuyen los ND en una determinada escena.
3.4. Realces y mejoras de la imagen
En esta parte se consideran aquellas técnicas dirigidas hacia la mejora de la
calidad visual de la imagen. En otras palabras, se trata de disponer mejor los
datos para su análisis visual, de tal forma que sean más evidentes los rasgos de
interés que presenta la imagen.
Los procesos de ajuste del contraste tienden a adaptar la resolución radiométrica
de la imagen a la capacidad del monitor de visualización. Cada sensor codifica la

radiancia recibida en un número determinado de ND, de acuerdo a las
características de su diseño. Ese rango digital puede no corresponder con el
número de niveles de visualización (NV) que facilita la consola gráfica, por lo que
resulta preciso ajustar, por algún procedimiento, ambos parámetros. En este
sentido, caben dos posibilidades:
i) que el sensor ofrezca un menor número de ND que el de NV facilitado
por el sistema de tratamiento
ii) que el sensor presente un número de ND que exceda la capacidad del
sistema.
En el primer caso, se deberá aplicar una expansión del contraste original, mientras
en el segundo una reducción al mismo.
La idea de contraste digital puede ilustrarse con un símil fotográfico. Una fotografía
aparece con poco contraste, desvaída, cuando no existe una gran diferencia entre
sus tonos más claros y más oscuros. De la misma forma podemos definir
digitalmente el contraste por relación a los ND máximo y mínimo de una imagen.
Tal definición puede apoyarse en cualquiera de las medidas de dispersión
comúnmente utilizadas en estadística (Schowengerdt, 1983).
De acuerdo con esto, es posible realzar ese contraste. Varios procedimientos
pueden conseguir este objetivo:
i) distribuir los NV linealmente, entre el máximo y mínimo ND de la imagen
ii) distribuir los NV a partir del histograma de los ND
iii) distribuir los NV en un determinado rango de interés
Estos son los tres procesos de expansión del contraste que a continuación se
analizan.

3.4.1. Expansión lineal
Es la forma más elemental de ajustar el contraste de la imagen al permitido por el
equipo de visualización. Basta distribuir linealmente de tal forma que el ND mínimo
y máximo de la imagen tengan asociados un NV de 0 y 255 respectivamente,
distribuyendo linealmente el resto entre ambos márgenes.
Para llevar a efecto esta transformación se precisa encontrar una función lineal,
que ajuste la relación ND-NV de acuerdo a la relación antes comentada.
3.4.2. Ecualización del histograma
La expansión lineal del contraste no tienen en cuenta las características del
histograma de la imagen, sino sólo sus extremos. Puede idearse una técnica de
realce más depurada, en donde se considere la forma de la distribución de
frecuencias en los ND originales.
Según este criterio, el NV de cada ND está en proporción no sólo a su valor, sino
también a su frecuencia. Aquellos ND con mayor número de píxeles serán los
que, proporcionalmente, ocupen un mayor rango de visualización en el monitor. El
proceso es más lento que el comentado previamente, pero ofrece mejores
resultados, especialmente si la imagen original presenta una distribución
gaussiana.
3.4.3. Expansión especial del contraste
La novedad de esta técnica radica en restringir el contraste a un rango específico
de ND, en donde se manifieste con mayor claridad una cubierta de interés. Por
ejemplo, en una aplicación sobre zonas marinas, convendrá resaltar
especialmente la visualización de los valores más bajos del histograma, aunque se
pierda contraste en otros rangos de la imagen.

La expansión especial puede realizarse señalando un umbral máximo y mínimo,
acorde con el rango digital de la cubierta que pretende realzarse (método lineal), o
limitando el histograma objeto a una ventana de la imagen donde se esté presente
dicha cubierta. En ambos casos, esta operación supone afinar mucho más la
representación visual de esa cubierta, en detrimento del contraste en otras áreas.
3.4. Composiciones en color
A partir de la información multi-espectral que generan la mayor parte de los
sensores espaciales, pueden obtenerse distintas composiciones de color. Basta
para ello aplicar cada uno de los tres colores primarios (azul, verde y rojo) a una
banda distinta de la imagen, seleccionada con el criterio y en el orden que se
estime más oportuno. El proceso permite visualizar, simultáneamente, imágenes
de distintas regiones del espectro, lo que facilita la delimitación visual de algunas
cubiertas. Por tratarse de bandas distintas, los realces aplicados a una
composición en color corresponden con los obtenidos en una expansión del
contraste, aplicada previamente a cada una de las tres bandas que intervienen en
el proceso.
La elección de las bandas para realizar la composición, y el orden de los colores
destinados a cada una, dependen del sensor sobre el que se trabaje y de la
aplicación última del proyecto. La composición más habitual es la denominada
falso color, fruto de aplicar los cañones de color rojo, verde y azul sobre las
correspondientes al infrarrojo cercano, rojo y verde, respectivamente. Esta
composición facilita la cartografía de masas vegetales, láminas de agua, ciudades,
etc., de ahí que se haya empleado profusamente en diversos estudios de análisis
visual.

3.5. Cambios de escala
Conviene manejar con cierta precaución el concepto de escala cuando se habla
de sensores óptico – electrónicos. La escala final de la imagen está en función del
tamaño con el que representemos el píxel, unidad mínima de información. Ahora
bien, la superficie real que ocupa el píxel es la misma, así como el ND que lo
define, independientemente del tamaño con el que éste se represente sobre el
monitor o el papel.
Hecha esta aclaración, obvia decir que en muchas situaciones el tratamiento
digital de imágenes requiere aumentar o disminuir el tamaño del píxel en pantalla.
Por cuanto la resolución física del monitor es constante (sólo admite un número
determinado de píxeles), el cambio de escala debe realizarse a través del
muestreo o replicación de los píxeles que componen la imagen.
Si pretende visualizarse un área con un número de píxeles superior a la
capacidad de la pantalla, basta seleccionar una muestra de la imagen original. En
pocas palabras, se trata de escoger uno de cada dos, tres o cuatro píxeles en la
imagen, para que pueda visualizarse sobre el monitor un área cuatro, nueve o
dieciséis veces más grande. Naturalmente que esto supone hacerlo con menos
detalle, ya que se está seleccionando sólo una parte de los ND originales. Sin
embargo, el proceso es muy útil en algunas instancias: por ejemplo, cuando se
pretende localizar una pequeña área de estudio sobre una escena completa. Así,
los programas de lectura de imágenes en cinta incluyen una rutina para saltar n
filas y columnas, con objeto de visualizar en pantalla un área más amplia de la que
permitirá el monitor. Sobre esa mayor superficie puede situarse el área de interés,
elegir sus coordenadas, y proceder a la lectura, píxel a píxel, sólo del sector de la
imagen.
El proceso contrario a la reducción se denomina magnificación, ampliación, o
simplemente zoom. Se trata de ampliar el tamaño del píxel sobre el monitor, con

objeto de estudiar una parte de la imagen con mayor detalle. Constituye una de las
opciones más frecuentes en tratamiento digital, puesto que facilita operaciones
muy comunes.

Capítulo 4 El proceso de clasificación Como se mencionó en el capítulo introductorio, esta tarea se lleva a cabo después
de darle un tratamiento a la imagen y consiste en definir primeramente las
categorías (fase de entrenamiento) y luego en etiquetar cada píxel de la imagen
en una de esas categorías (fase de asignación).
En nuestro caso, sólo se pretende segmentar las zonas urbanas, por lo que las
categorías definidas serán zonas urbanas y zonas no urbanas.
Tradicionalmente se han dividido los métodos de clasificación en dos grupos:
supervisado y no supervisado, de acuerdo a la forma en que son obtenidas las
estadísticas de entrenamiento. El método supervisado parte de un conocimiento
previo del terreno, a partir del cual se seleccionan muestras para cada una de las
categorías. Por su parte, el método no supervisado procede a una búsqueda
automática de grupos de valores homogéneos dentro de la imagen. En este caso,
queda al usuario la labor de encontrar correspondencias entre esos grupos y sus
categorías de interés.
Los criterios más comunes para establecer la asignación son: mínima distancia
euclidiana, por el cual el píxel se asigna a la clase de zonas urbanas si la distancia
euclidiana del píxel a la media es menor que un cierto umbral, y mínima distancia
de Mahalanobis, el cual es un proceso similar, pero en este caso se usa la
distancia de Mahalanobis.
En la siguiente parte se explican con más detalle cada uno de estos métodos.
4.1. Clasificador de mínima distancia euclidiana
El criterio más sencillo para asignar un píxel a una de las categorías consiste en
incluirlo como zona urbana si esta cercano a la media de esta categoría, es decir

que la distancia entre ese píxel y el centroide de clase de zona urbana sea
mínima. Lógicamente no se trata de una distancia geográfica, sino espectral,
consecuencia de comparar los ND de cada píxel con los del centro de las distintas
categorías, para todas las bandas que intervienen en el análisis.
Pueden considerarse varias formas de medir esa distancia espectral entre píxeles
y clases. La más empleada en este sentido, es la distancia euclidiana:
Donde id es la medida de la distancia entre el píxel ig y el centroide de clase de
zona urbana que se calcula como la raíz cuadrada del sumatorio de las diferencias
entre el ND de ese píxel y el ND medio de la categoría de zonas urbanas, para las
m bandas que intervienen en la clasificación. Tras calcular esta distancia para los
M puntos de la imagen, se procede a analizar cuales son los píxeles cuya
distancia al centroide de clase de zona urbana es menor que un cierto umbral.
La distancia que calcula este algoritmo es lineal, sin considerar la propia
dispersión de cada categoría o la correlación que exista entre las banda. Tiende,
por tanto, a delimitar grupos circulares de radio proporcional a la situación de las
zonas urbanas.
,...,1 para 1
Miggdm
kkikii =−=−= ∑
=
µµ
Centroide de la clase
de zonas urbanas

Para este método se requiere la estimación de la media para la zonas urbanas, el
cual se calcula como:
Donde N es el número de píxeles en la zona urbana. Una vez que se calcula esto,
se toma con este valor para las imágenes a clasificar.
4.2. Clasificador de mínima distancia de Mahalanobis
Algunos autores han propuesto modificaciones en el cálculo de la distancia que se
mencionó en la sección anterior, de tal forma que se considere la varianza de las
clases (Schowengerdt, 1983; Lo et al, 1986).
Para el clasificador de mínima distancia de Mahalanobis, se procede de manera
similar a el clasificador de mínima distancia euclidiana, sólo que ahora, la distancia
considerada es la de Mahalanobis, que se define por:
Donde M es el tamaño de la imagen ∑ es la matriz de covarianza (también
estimada), µ es la media estimada de igual manera que en la sección anterior, y
id es la distancia de Mahalanobis del píxel ig al centroide de la clase de zonas
urbanas.
En este caso, se considera la dispersión de la categoría de zonas urbanas, por lo
cual, delimita grupos elípticos definidos por la matriz de covarianza.
∑∈
=ZUi
igN1
µ
( ) ( ) ,...,1 para 1 Miggd iT
ii =−∑−= − µµ

La matriz de covarianza se estima como:
( )∑=
−−=∑N
i
Tii gg
1)( µµ
donde la sumatoria corre sobre los pixeles que son de la clase de zonas urbanas.
4.3. Operadores morfológicos
El procesamiento morfológico de imágenes constituye una clase de
transformaciones en la cual la forma y estructura de los objetos es modificada para
dilucidar su naturaleza morfológica (Barrera, et al., 1998). En toda la discusión que
sigue, las definiciones se aplican a imágenes binarias (dos valores) en donde los
objetos de interés han sido previamente segmentados.
Dos de las transformaciones básicas en la morfología matemática son la dilatación
y erosión. En la primera de éstas, un objeto crece uniformemente en su extensión
espacial, mientras que en la segunda el objeto reduce su extensión espacial
uniformemente. Estas dos operaciones básicas, y otras más, están basadas en
transformaciones de tipo intersecta o no intersecta (hit or miss) cuya definición es
Centroide de la clase
de zonas urbanas

como sigue: Se considera un elemento estructural de tamaño impar, el cual
recorre todas las posiciones definidas por los píxeles de la imagen; si el patrón
binario del templete coincide (hit) con el estado (0 o 1) de los píxeles de la imagen
cubiertos por éste, entonces en la imagen de salida el píxel en correspondencia
espacial con el centro del templete se pone en un estado binario predeterminado;
por el contrario, si el templete no coincide (miss) con el estado de los píxeles de la
imagen, el píxel de saluda se fija en el estado binario opuesto [3].
Dada una imagen binaria f y un elemento estructural h, se definen la erosión y
dilatación respectivamente como sigue:
E(f,h)(r)=1 si H(r) está contenido en F
=0 si no
D(f,h)(r)=1 si FÇH(r) es no vacío
=0 si no
Donde H(r)={r:h(x-r)=1}
F={r:f(r)=1}
Los operadores morfológicos se utilizan como post procesamiento, una vez que se
tiene una clasificación (digamos con mínima distancia euclidiana o de
Mahalanobis). Tienen la función de eliminar pequeños detalles en el fondo de la
imagen o llenar huecos en el objeto (zona urbana) y suaviza deformaciones del
mismo, esto con el propósito de mejorar los resultados obtenidos, eliminando
puntos aislados y cerrando la zona clasificada como urbana, para eliminar los
huecos en ésta. El resultado de aplicar estos operadores depende en gran parte
del elemento estructural que se tome.
Nota: No se presentan imágenes satelitales debido a que la distribución de las
imágenes con que se cuenta no es libre. Para cualquier información, por favor
contactar al autor.

Conclusiones y trabajo futuro
Conclusiones generales
Se desarrolló un software para tratamiento de imágenes del satéliteLANDSAT –TM en la que es posible efectuar todo tipo de transformacionesantes descritas, tales como: realces y mejoras de la imagen, composicionesen color, cambios de escala, etc. Al software desarrollado se le asignó elnombre de PROCIS (Procesamiento de Imágenes de Satélite)
La herramienta desarrollada permite segmentar las zonas urbanasempleando los métodos de mínima distancia euclidiana y mínima distanciade Mahalanobis.
La herramienta desarrollada permite además mejorar los resultadosobtenidos con la segmentación, usando operadores morfológicos.
El método de mínima distancia de Mahalanobis arroja mejores resultados que el
de mínima distancia Euclidiana, ya que éste último no considera la
dispersión ni la varianza.
Es importante considerar el entorno de la imagen para la segmentación, pues lainformación de un solo píxel en muchas ocasiones no es suficiente
para efectuar la clasificación.
Los operadores morfológicos disminuyen el error de segmentación, ya que elimina
puntos aislados que se clasificaron como zonas urbanas y llena huecos en
una zona urbana bien definida.
Trabajo futuro
Como trabajo futuro, se pueden mejorar los resultados empleando algunos
otros métodos que consideren la información en una vecindad para cada
píxel, en la cual se consideren otros aspectos de la imagen tales como
textura, tamaños, formas, etc.

Apéndice A. Manual de Usuario del software PROCIS
En este apartado podrá ver de una manera breve, cómo utilizar el software
PROCIS para tratamiento de imágenes de satélite y segmentación de zonas
urbanas.
A.1. Pantalla principal
La figura A.1 muestra la pantalla principal que aparece al momento de ejecutar el
programa. En esta pantalla se encuentra la mayoría de las tareas que realiza el
software para tratamiento de imágenes de satélite.
Figura A.1 Pantalla principal

A.2. Dimensiones del archivo
El primer paso consiste en determinar las dimensiones de la imagen que se va a
leer. Generalmente estas dimensiones se encuentran en un archivo de cabecera
asociado al archivo que contiene la imagen.
Figura A.2 Dimensiones de Archivo
En la figura A.2 se muestra la sección en la cual se introduce el tamaño de la
imagen. El número de renglones y columnas se asocia a alto y ancho de la
imagen respectivamente.
A.3. Selección de la combinación de color
En la figura A.3. se muestra la sección del software en la cual se selecciona la
combinación de color en que se desea visualizar la imagen.
Figura A.3 Combinación de color

La elección de las bandas para los canales rojo, verde y azul depende del objetivo
de la visualización.
A.4. Dimensiones de la imagen
En la sección de dimensiones de imagen se muestra el tamaño actual en píxeles
de la imagen que actualmente se observa. No es necesariamente el mismo
tamaño de la imagen leída en el archivo.
Figura A.4. Dimensiones de la imagen
En la figura A.4 se muestra la sección en la pantalla donde se muestran las
dimensiones de la imagen. Ya que aún no hay una imagen, el tamaño de esta es
cero en ambas dimensiones.
A.5. Lectura de archivo
Éste es el segundo paso para realizar la segmentación, y consiste en cargar las
bandas de la imagen. Al hacer clic en el botón que tiene un icono de fólder (Figura
A.5), se abre un cuadro de diálogo para leer un archivo con formato BIL, que ya
contiene la información de todas las bandas.
Figura A.5 Lectura de archivo

Figura A.6. Abrir archivo
En la figura A.5 se muestran los botones para abrir archivo, guardar imagen actual
y copiar imagen actual. En la figura A.6. se muestra el cuadro de diálogo para abrir
el archivo de extensión .bil que contiene la información de las bandas.
A.6. Zoom, selección y marcado
Figura A.7. Zoom, selección y marcado
En la figura A.7. se muestra la sección de la pantalla principal donde se
encuentran los botones para realizar acercamientos (zoom in), alejamientos (zoom
out), seleccionar una sección de la imagen que se desea ver a detalle y marcar en
forma manual zonas de interés.
El color del recuadro para seleccionar y del lápiz para marcar las zonas de interés
se puede seleccionar presionando el botón Seleccionar Color (Figura A.8.9.

Figura A.8. Selección de color
En la figura A.8. se muestran los botones para seleccionar color y limpiar
contornos. Una vez que se han guardado las marcas efectuadas en zonas de
interés, se puede guardar la imagen que contiene sólo las marcas (guardar bordes
en archivo del menú principal). Después de esto, si se desea, se puede limpiar la
imagen haciendo clic en el botón de Limpiar Contornos.
A.7. Realces
En la figura A.9. se muestran los botones para realizar los realces con el cual se
desea visualizar la imagen.
Figura A.9 Realces
Los botones corresponden a visualizar la imagen sin realce, con realce lineal, con
ecualizado de histograma y contraste especial respectivamente. El último botón es
para determinar hasta que nivel máximo se desea realizar el realce en cada banda
(Figura A.10).
Figura A.10. Opciones de color

Al hacer clic en el botón de colores, aparece la ventana de la figura A.10. donde se
puede seleccionar el nivel máximo para realce de cada banda.
A.8. Histograma y estadísticas
En la figura A.11. se muestran los botones correspondientes a ver histograma y
estadísticos respectivamente.
Figura A.11. Histograma y estadísticas
Al hacer clic en el botón de histograma, aparece la ventana de la figura A.12,
donde se muestran los histogramas de la imagen actual, correspondientes a cada
una de las bandas asociadas con los canales rojo, verde, azul. Se muestran los
histogramas de la imagen original y de la imagen después del realce con el que se
está visualizando la imagen.
Figura A.12 Histograma

Figura A.13. Estadísticas
Al hacer clic en el botón de estadísticos, aparece la ventana dela figura A.13. en
donde se muestran las estadísticas de cada banda asociada a los canales RGB
tanto de la imagen original, como de la imagen después del realce.

A.9. Cambios de escala
Al hacer clic en el botón submuestreo del submenú ver en el menú principal,
aparece la ventana mostrada en la figura A.14, donde se indica cada cuantos
píxeles tomar la muestra.
Figura A.14. Cambios de escala
A.10. Clasificación de zonas urbanas
Figura A.15. Clasificación de zonas urbanas

Al hacer clic en el botón de clasificar zonas urbanas del submenú procesar del
menú principal aparece la ventana que se muestra en la figura A.15, en la cual se
indican los parámetros para clasificación y el método deseado.
Primeramente, deben seleccionarse las bandas que se desean considerar para la
clasificación, luego seleccionar el método de clasificación y finalmente establecer
un umbral para clasificación. En el campo del umbral se dan inicialmente
umbrales sugeridos distintos para ambos métodos, los cuales son los que han
arrojado mejores resultados para clasificación.
A.11. Operadores morfológicos
Al hacer clic en el botón de operadores morfológicos del submenú procesar del
menú principal aparece la ventana que se muestra en la figura A.16, en la cual se
indica el tamaño de elemento estructural y si se desea aplicar una erosión o una
dilatación.
Figura A.16. Operadores Morfológicos
El elemento estructural que se emplea para los operadores morfológicos tiene las
formas mostradas en la figura A.17. para los correspondientes tamaños de
elemento estructural.

••••
••••••••••••
••••••••
•
••••
••••••••
•
••••
•
Figura A.17. Elementos estructurales.

Bibliografía[1] Chuvieco, Emilio, Fundamentos de Teledetección Espacial , Ediciones
RIALP, S. A. , España 1990. Primera Edición.
[2] Gallo, Ely, Segmentación de Imágenes de Satélite usando Modelos Ocultos
de Campos Markovianos, 2002 México. Tesis de Maestría. Centro de
Investigación en Matemáticas (CIMAT)
[3] Lira Chávez, Jorge, Introducción al tratamiento digital de imágenes, Fondo
de Cultura Económica. México 2002. Primera Edición.
[4] Marroquín, José Luis, apuntes del curso de Procesamiento de Señales
impartido por el Dr. José Luis Marroquín.
[5] Marroquín, José Luis, apuntes del curso Visión Computacional impartido
por el Dr. José Luis Marroquín.
Recommended