Principes et méthodes de commande
des entraînements à vitesse variable
Asservissement en vitesse d'un moteur à
courant continu
Thomas Dupas Pierre Fritsch
4 mai, 9 mai, 7 juin 2005
Supélec, campus de Metz

Au cours de ces 3 séances de travaux de laboratoire, on cherche à asservir en vitesse unmoteur à courant continu alimenté par un servo amplicateur. Dans un premier temps,on modélise le moteur et son bloc d'alimentation, et on simule ce modèle. On conçoitensuite une commande pour le système en vue du respect d'un cahier des charges xéen s'aidant de simulations. Enn, on réalise cette régulation et on confronte théorie,simulation et pratique.
Schéma du système

Table des matières
1 Modélisation et simulation en boucle ouverte 5
1.1 Mise en équation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.1.1 Modélisation du servo-amplicateur . . . . . . . . . . . . . . . . . 51.1.2 Calcul du moment d'inertie total équivalent . . . . . . . . . . . . . 51.1.3 Fonctions de transfert du moteur . . . . . . . . . . . . . . . . . . . 61.1.4 Schéma-bloc du système . . . . . . . . . . . . . . . . . . . . . . . . 7
1.2 Étude en boucle ouverte . . . . . . . . . . . . . . . . . . . . . . . . . . . . 71.3 Simulation du bloc amplicateur . . . . . . . . . . . . . . . . . . . . . . . 81.4 Simulation du système complet . . . . . . . . . . . . . . . . . . . . . . . . 12
1.4.1 Modélisation du moteur . . . . . . . . . . . . . . . . . . . . . . . . 121.4.2 Simulation . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 12
2 Synthèse et simulation des correcteurs 14
2.1 Régulation simple . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 142.1.1 Choix du régulateur : régulateur PI . . . . . . . . . . . . . . . . . . 142.1.2 Calcul du régulateur : réglage fréquentiel dans le plan de Bode . . 152.1.3 Vérication : simulation de la réponse indicielle . . . . . . . . . . . 15
2.2 Régulation cascade : boucle de régulation de courant . . . . . . . . . . . . 182.2.1 Principe . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2.2 Capteur de courant . . . . . . . . . . . . . . . . . . . . . . . . . . . 182.2.3 Objectifs de la boucle de régulation de courant . . . . . . . . . . . 192.2.4 Synthèse du correcteur . . . . . . . . . . . . . . . . . . . . . . . . . 192.2.5 Vérication par simulation . . . . . . . . . . . . . . . . . . . . . . . 192.2.6 Intérêt d'une telle boucle . . . . . . . . . . . . . . . . . . . . . . . 22
2.3 Régulation cascade : boucle de régulation de vitesse . . . . . . . . . . . . . 222.3.1 Synthèse du correcteur . . . . . . . . . . . . . . . . . . . . . . . . . 222.3.2 Simulation de la réponse indicielle . . . . . . . . . . . . . . . . . . 232.3.3 Respect du cahier des charges . . . . . . . . . . . . . . . . . . . . . 25
3 Réalisation et validation expérimentale 26
3.1 Réalisation d'un limiteur de courant . . . . . . . . . . . . . . . . . . . . . 263.2 Étude de la réponse indicielle . . . . . . . . . . . . . . . . . . . . . . . . . 26
3.2.1 Vérication du modèle du capteur de courant . . . . . . . . . . . . 263.2.2 Modélisation des frottements secs . . . . . . . . . . . . . . . . . . . 26
3.3 Identication du modèle linéaire . . . . . . . . . . . . . . . . . . . . . . . . 283.4 Réalisation du correcteur . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29
3

3.5 Validation du cahier des charges . . . . . . . . . . . . . . . . . . . . . . . . 30
4

Partie 1
Modélisation et simulation en boucle
ouverte
1.1 Mise en équation
Mettons le système en équation.
1.1.1 Modélisation du servo-amplicateur
Le servo-amplicateur est un hacheur quatre quadrants à modultaion de largeur d'im-pulsion. Étant utilisé dans son régime linéaire, il peut être considéré comme une constanted'amplication Ka = 6, associée à une constante de temps du premier ordre τa = 1
21
17 kHz ,soit τa = 29, 4 µs. La fonction de transfert de cet amplicateur s'écrit donc
Hampli(p) =Um(p)U(p)
=Ka
1 + τap, (1.1)
où l'on note U(p) la consigne et Um(p) la tension de commande du moteur.
1.1.2 Calcul du moment d'inertie total équivalent
Le moment d'inertie total équivalent rapporté à l'axe du moteur est donné par
Jeq = Jr + Jred +Jvol
N2
avec : Jr = 22, 5 · 10−5 kg ·m2 moment d'inertie du moteur et du réducteur,
Jvol = (πR2eρ)R2
2 moment d'inertie du volant, où R = 8 cm, e = 4, 7 cm et ρ =2, 7 · 10−3 kg ·m2, soit Jvol = 8, 2 · 10−3 kg ·m2,
N = 6 facteur de réduction.D'où :
Jeq = 4, 52 · 10−4 kg ·m2
5

Fig. 1.1: Schéma-bloc du moteur
1.1.3 Fonctions de transfert du moteur
Le moteur est une machine à courant continu, caractérisée par son équation mécanique
um = Rim + Ldimdt
+ φ0ωm
et son équation électrique
Jeqdωm
dt= φ0im − fωm − cr.
En appliquant la transformation de Laplace, ces deux équations s'écrivent
Um(p) = (R + Lp) Im(p) + φ0Ω(p)(Jeq + f)Ωm(p) = φ0Im(p)− Cr(p)
et mènent au schéma-bloc de la gure 1.1.Le moteur se comporte donc comme un système à deux entrées : tension de commande um et couple résistant cr (perturbation) et à deux sorties : vitesse de rotation ωm et courant d'induit im.
En considérant qu'il n'y a pas de couple résistant (cf. théorème de superposition), onobtient les fonctions de transfert du moteur en vitesse et en courant :
Hωm(p) =Ωm(p)Um(p)
=Kv
1 + (τm + µτe) p + τmτep2(1.2)
Him(p) =Im(p)Um(p)
=f + Jeqp
(R + Lp)(f + Jeqp) + φ20
.
Ces fonctions de transfert font intervenir les constantes de temps électrique et méca-nique du moteur :
τe =L
R= 2, 4 · 10−3 s
6

Fig. 1.2: Schéma-bloc du système (en boucle ouverte)
τm =RJeq
φ20 + Rf
= 13, 7 · 10−3 s,
ainsi que les constantes
Km =φ0
φ20 + Rf
= 6, 06 V−1 · s−1
µ =Rf
φ20 + Rf
= 30, 3 · 10−3.
1.1.4 Schéma-bloc du système
En assemblant les modélisations de l'amplicateur (paragraphe 1.1.1) et du moteur(paragraphe 1.1.3), on aboutit au schéma-bloc du système donné par la gure 1.2.
1.2 Étude en boucle ouverte
Les équations (1.1) et (1.2) conduisent à la fonction de transfert du système en boucleouverte :
Hω(p) =Ωm(p)U(p)
=Um(p)U(p)
Ωm(p)Um(p)
= Hampli(p)·Hωm(p) =Ka
1 + τap
Km
1 + (τm + µτe) p + τmτep2
En comparant les constantes de temps intervenant dans cette fonction de transfert, onréalise que la constante de temps du pont est très faible devant les constantes de tempsdu moteur : τa τe et τa τm ; on peut donc la négliger, et on obtient alors commefonction de transfert pour cet élément :
Hampli ' Ka = 6.
7

La fonction de transfert du système en boucle ouverte devient alors
Hω(p) =KaKm
1 + (τm + µτe) p + τmτep2
La constante de temps mécanique τm dépend linéairement de J , mais aussi de f et φ0.f est généralement faible, on a alors µ 1. On peut négliger µτe devant τm et on poseτm ' τm + τe. Avec ces approximations, on peut mettre Hω(p) sous la forme simpliée :
Hω(p) =Ω(p)U(p)
=Kv
(1 + τmp)(1 + τep),
où τm = 13, 7 · 10−3 s , τe = 2, 4 · 10−3 s et Kv = KaKm = 36, 36 V−1 · s−1 .Cette expression permet d'obtenir (cf. schéma-bloc g. 1.2) la fonction de transfert
pour le courant induit :
Hi(p) =Im(p)U(p)
=f + Jeqp
φ0Hω(p) =
f + Jeqp
φ0
Kv
(1 + τmp)(1 + τep).
Les diagrammes de Bode de ces fonctions de transfert pour la vitesse et le courant sontdonnées en g. 1.3 et g. 1.4.
1.3 Simulation du bloc amplicateur
On considère le bloc amplicateur seul, sans le moteur, qu'on alimente par une sourcede tension idéale de 60 V. Modélisons le hacheur quatre quadrants ainsi que son systèmede commande MLI à l'aide de SimPowerSystems et de Simulink.On réalise la commande MLI par comparaison d'un signal triangulaire périodique avec
un seuil réglable entre −10 V et +10 V, qui constitue l'entrée de l'amplicateur. Latension moyenne de commande du moteur variera linéairement avec les modications decette entrée.On charge le hacheur avec un circuit RL série de mêmes caractéristiques que l'induit
du moteur (R = 0, 8 Ω, L = 1, 9 H).Le schéma utilisé et les résultats de la simulation sont illustrés par la gure 1.5.La tension de sortie est en créneaux : les signaux de commande des MOSFET sont
bien ceux attendus.Le courant de sortie, quant à lui, a l'allure générale de la charge d'un circuit RL, mais,
quand on le regarde de près, il présente une ondulation à la même période que le hachage.Cette ondulation s'explique par le fait que la charge est alimentée par une tension hachée.On observe donc des harmoniques introduites par le hacheur sur les signaux de sortie,
qui ont pour fréquence fondamentale la fréquence de découpage.
8

Fig. 1.3: Diagramme de Bode de la fonction de transfert pour la vitesse en boucle ouverteHω(p)
9

Fig. 1.4: Diagramme de Bode de la fonction de transfert pour le courant en boucle ou-verte Hi(p)
10

Fig. 1.5: Résultat de la simulation du bloc amplicateur (schéma en haut) tracé ducourant (en haut) et de la tension de sortie (au milieu) ; en bas, génération dusignal de commande MLI de rapport cyclique α = 75% par comparaison d'unsignal triangulaire périodique avec un seuil réglable (commande).
11

1.4 Simulation du système complet
Dans Simulink, on connecte maintenant le bloc amplicateur précédent à quelque chosequi ressemble davantage au moteur considéré. On remplace donc la charge RL par unecharge plus élaborée.
1.4.1 Modélisation du moteur
On cherche à modéliser une machine à courant continu à aimant permanent. Ce typede moteur n'existe pas comme modèle dans Simulink. On fait donc appel à une DC
Machine1, une machine à courant continu à excitation séparée, et on essaie de modéliserles aimants permanents comme s'il s'agissait d'une bobine traversée par un courant.On réalise cette excitation virtuelle en branchant une source de tension de 16 V aux
bornes d'une bobine Laf = 1 H. En prenant Rf = 100 Ω, le moteur est alors traversépar un courant If = 0, 16 A. La constante de ux résultante φ0 = LafIf = 0, 16 V · s estbien la même que celle générée par les aimants.L'induit du moteur est caractérisé par R = 0, 8 Ω et L = 1, 9 H.
1.4.2 Simulation
La gure 1.6 présente le nouveau schéma, faisant intervenir la DC Machine1, et donnela réponse indicielle en vitesse et courant induit du système.La réponse en vitesse est celle d'un second ordre sans dépassement à tangente à l'origine
nulle. Le courant, après une brutale augmentation au démarrage (constante de temps τe),diminue et se stabilise près de sa valeur en régime permanent (constante de temps τm).Juste après le démarrage, i.e. au cours des premières 4 ms, c'est la constante de temps
électrique du moteur qui xe son comportement. Il a ainsi la même réponse qu'un circuitRL. On retrouve donc ici le modèle de la première partie : la réponse en courant du moteur
(g. 1.6) se superpose avec la réponse en courant du circuit RL (g. 1.5) au démarrage.
Ensuite, on observe une diérence entre les deux courbes ; la constante de temps mé-canique du moteur prend le dessus, la vitesse se stabilise et il y a décroissance du courantinduit. On atteint le régime permanent.Les mêmes ondulations de courant se présententent, dues à l'alimentation par une
tension hachée. Notons de plus l'introduction du coecient de frottement visqueux et lesnon-linéarités qu'il introduit.
12

Fig. 1.6: Résultats de la simulation du système complet : vitesse (en haut) et courant(en bas) pour une entrée en échelon
13

Partie 2
Synthèse et simulation des correcteurs
On se propose maintenant de faire la synthèse d'un correcteur assurant le respect ducahier des charges suivant : Erreur statique nulle vis-à-vis de la consigne, autrement dit présence d'une intégra-tion dans la boucle ouverte ;
Indépendance vis-à-vis d'une perturbation indicielle du couple résistant, ce qui im-plique que l'intégrateur doit se siter en amont de la perturbation ;
Marge de phase de 45, i. e. phase supérieure à -135à la pulsation de coupure ; Temps de réponse indicielle τm le plus court possible, inférieur ou égal à 10 ms dansle régime linéaire, ce qui représente une pulsation de coupure en boucle ouverteωc ≥ 300 rad/s1.
Génératrice tachymétrique
Pour assurer la boucle de retour, on fait appel à une génératrice tachymétrique deconstante de fem Kω = 57, 3 · 10−3 V · s et de bande passante 150 Hz, sa fonction detransfert est donc :
Htachy(p) =Kω
1 + p2π·150 rad/s
.
Cette génératrice tachymétrique introduit une inertie de 0, 5 · 10−5 kg ·m2 que l'onnéglige devant l'inertie totale équivalente.
2.1 Régulation simple
2.1.1 Choix du régulateur : régulateur PI
Dans un premier temps, on fait appel à un régulateur PI, de fonction de transfert
HPI(p) = K
(1 +
1τip
).
Le schéma de principe du système ainsi corrigé est donné g. 2.1.Ce correcteur, grâce à son action intégrale, permet d'annuler l'écart entre la consigne et
la mesure, ainsi que l'eet des perturbations constantes intervenant en aval du régulateur.
1en utilisant la relation ωcτm ' 3
14

Fig. 2.1: Schéma de principe de la correction PI
2.1.2 Calcul du régulateur : réglage fréquentiel dans le plan de Bode
Le réglage fréquentiel du régulateur PI se fait en deux phases : d'abord, on ajuste le gain de façon à obtenir la pulsation de coupure souhaitée
ωc = 300 rad/s ; puis on place l'action intégrale dans les basses fréquences de façon à obtenir la margede phase souhaiteé (phase de -135à la pulsation de coupure ωc).
On aboutit ainsi aux paramètres K = −18, 5 dB et τi = 6, 5 · τm = 89, 05 · 10−3 s. Engure 2.2, les diagrammes de Bode des fonctions de transfert en boucle ouverte corrigée.
2.1.3 Vérication : simulation de la réponse indicielle
Testons l'ecacité de cette régulation en simulant la réponse indicielle du système enboucle fermée. Le schéma Simulink de la régulation, donné g. 2.3, conduit aux réponsesindicielles en vitesse et en courant g. 2.4.On mesure sur la réponse indicielle en vitesse : le temps de premier maximum τm = 9 ms, qui est bien inférieur aux 10 ms imposéespar le cahier des charges ;
et le dépassement D% = 10%.On teste également la résistance à un échelon de perturbation. La gure 2.5 donne laréponse en vitesse et en courant du système soumis à un tel échelon de perturbation,et montre que le système est capable de réguler la vitesse malgré une telle variation decouple. Pour cela, il fournit de l'énergie électrique, ce qui se traduit par une stabilisationde la réponse en courant sur une valeur négative.Un tel correcteur PI présente toutefois un inconvénient majeur : il sut d'observer la
réponse en courant g. 2.4 pour s'en convaincre. À un échelon de 5 V, le système répondavec une intensité qui 50 A en 10 ms ! De tels pics d'intensité peuvent être destructifspour le système, car ils induisent des couples élevés. Il faudrait donc réguler le courant,an de l'empêcher de prendre des valeurs trop élevées, en vue de protéger le système.
15

Fig. 2.2: Réglage du régulateur PI : diagramme de Bode de la fonction de transfert pourla vitesse en boucle ouverte corrigée, tachymètre inclus
Fig. 2.3: Schéma Simulink de la régulation PI
16

Fig. 2.4: Régulation PI Réponse indicielle du schéma donné g. 2.3 pour un échelonde 5 V en entrée à t = 1 s, en vitesse (en bas) et en courant (en haut)
Fig. 2.5: Régulation PI (schéma g. 2.3) Réponse à un échelon de perturbation surve-nant à t = 2 s
17

Fig. 2.6: Schéma de principe de la régulation cascade
2.2 Régulation cascade : boucle de régulation de courant
2.2.1 Principe
Pour remédier au problème précédent, on utilise une régulation cascade en courantpuis en vitesse.Pour ce faire, on exprime la fonction de transfert du système en boucle ouverte comme
le produit de deux fonctions de transfert intermédiaires :
On arrive au résultat
H1(p) =f + Jeqp
φ20 + (R + Lp)(f + Jeqp)
H2(p) =φ0
f + Jeqp
en modiant le schéma-bloc du système (g. 1.2) de sorte que la boucle de retourprenne son départ en Im(p) et non en Ωm(p).On crée donc un bouclage autour de la partie courant du système, qui fait intervenir
un capteur de courant et un correcteur, comme illustré g. 2.6.
2.2.2 Capteur de courant
Le capteur de courant fournit une tension proportionnelle à l'intensité de l'induit, avecun gain Ki = 1
2 et une bande passante à 1500 Hz. Sa fonction de transfert est donnée par
Hcour(p) =Ki
1 + p2π·1500 rad/s
.
18

La réponse indicielle du système en boucle ouverte, capteur de courant inclus, estdonnée g. 2.7. On y constate que le capteur réagit en 1 ms et présente un dépassementde 24 %.
2.2.3 Objectifs de la boucle de régulation de courant
Fixons-nous des objectifs sur la boucle de courant an de pouvoir faire la synthèse ducorrecteur : on veut un dépassement limité (c'est pour ça qu'on fait une régulation cascade !),que l'on assure par une marge de phase de 45;
il faut que la boucle de courant soit rapide devant la boucle de vitesse (c'est la bouclela plus interne) ; disons qu'elle doit être au moins dix fois plus rapide, ce qui revientà prendre pour pulsation de coupure ω1 = 10 · ωc = 3000 rad/s.
2.2.4 Synthèse du correcteur
Au vu des diagrammes de Bode de la boucle ouverte en courant non corrigée, onconstate qu'une action proportionnelle surait à remplir les deux conditions ci-dessus.Nous avons toutefois besoin d'une action intégrale dans la régulation de courant, de façonà annuler l'erreur statique vis-à-vis de la consigne, et à assurer l'indépendance face à uneperturbation qui interviendrait en aval de cet intégrateur. On choisit donc un régulateur
PI, de fonction de transfert
R1(p) = K1 ·(
1 +1
Ti1p
)On ajuste les paramètres K1 et Ti1 dans le domaine fréquentiel, de façon à satisfaire
les conditions qu'on s'est xées au paragraphe précédent. On obtient :
K1 = 1, 8
Ti1 =2ω1
= 6, 67 · 10−4 s
La réponse fréquentielle de la boucle ouverte corrigée par ce régulateur PI est donnéegure 2.8 et montre que ces paramètres permettent d'assurer une pulsation de coupureω1 = 3000 rad/s et une marge de phase de 45, qui sont les paramètres désirés.
2.2.5 Vérication par simulation
Assurons-nous que cette boucle interne fonctionne avant de passer à la boucle de vi-tesse. Pour ce faire, on simule sa réponse indicielle, qui fait apparaître (g. 2.9) un dé-passement de 26 % et un temps de réponse de 0, 8 ms, et vérie de ce fait les contraintesqu'on lui a imposées.
19

Fig. 2.7: Réponse indicielle du système en boucle ouverte (test du capteur de courant).De haut en bas : réponse du capteur de courant, consigne, et vitesse du moteur.
20

Fig. 2.8: Régulation cascade diagramme de Bode des fonctions de transfert de la bouclede régulation de courant ouverte corrigée (cf. schéma en g. 2.6)
Fig. 2.9: Régulation cascade Réponse indicielle de la boucle de courant corrigée
21

Fig. 2.10: Régulation cascade schéma de principe
2.2.6 Intérêt d'une telle boucle
Les avantages de cette régulation cascade sont les suivants : le régime transitoire est plus rapide ; l'eet des perturbations en couple est d'autant plus réduit que la boucle de courantest rapide vis-à-vis de la boucle de vitesse ;
la boucle de courant permet la régulation du courant, et on peut donc : limiter le couple, c'est-à-dire travailler en régime transitoire à couple constant, réguler le couple (ou l'eort) transmis à la charge, et limiter le courant pour des questions de sécurité du moteur et du convertisseurassocié.
2.3 Régulation cascade : boucle de régulation de vitesse
On imbrique à présent la boucle de courant dans une boucle de vitesse, comme illustrépar la gure 2.10.
2.3.1 Synthèse du correcteur
On utilise un régulateur PI pour réguler la boucle de vitesse.
R2(p) = K2 ·(
1 +1
Ti2p
)On ajuste les paramètres K2 et Ti2 de façon à satisfaire le cahier des charges que l'on
s'est xé :
22

Fig. 2.11: Régulation cascade boucle de régulation de vitesse diagramme de Bodedes fonctions de transfert de la boucle ouverte corrigée représentée g. 2.10
K2 = 9, 5
Ti2 = 10 ms
Le diagramme de Bode des fonctions de transfert de la boucle ouverte corrigée est donnégure 2.11 et montre que ces paramètres permettent d'assurer, pour l'ensemble de larégulation cascade, une pulsation de coupure ωc = 300 rad/s et une marge de phase de45.
2.3.2 Simulation de la réponse indicielle
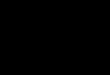
On simule la réponse indicielle de la régulation cascade dont on vient de faire la syn-thèse, grâce au schéma Simulink en gure 2.12. Sur cette réponse indicielle, on relève undépassement de 24,2 % et un temps de réponse de 6, 3 ms, ce qui est conforme à nosattentes.Pour ce qui est du courant, on observe toujours un pic au démarrage, mais d'intensité
moins élevée qu'avec le régulateur PI simple (à comparer avec la réponse en courant g.2.4). L'objectif est atteint.
23
Fig. 2.12: Régulation cascade Réponse indicielle de la boucle de vitesse corrigée enhaut, le courant, en bas, la vitesse
24

2.3.3 Respect du cahier des charges
La régulation cascade dont nous venons de faire la synthèse permet donc de satisfaire
les critères du cahier des charges xé. En eet : l'erreur statique est nulle vis-a-vis de la consigne (cf. g. 2.12) ; la présence des deux intégrateurs assure l'indépendance vis-à-vis d'une perturbationindicielle du couple résistant ;
la marge de phase vaut 45(cf. g. 2.11), ce qui correspond aux 24,2 % de dépasse-ment observés sur la g. 2.12 ;
le temps de réponse indicielle est de 6, 3 ms, inférieur aux 10 ms imposées (cf. g.2.12).
25
Partie 3
Réalisation et validation expérimentale
Cette partie vise à valider la synthèse du correcteur de la partie précédente et à analyserl'origine d'éventuelles discordances entre modèle théorique et expérience.
3.1 Réalisation d'un limiteur de courant
Avant de relier l'amplicateur au moteur, il est nécessaire de s'assurer que le couranttraversant le moteur ne dépassera jamais son courant nominal spécié à 6 A. Si on admetles courants de ±4 A, il faut donc limiter à Umax = 2 V la tension de consigne ui en entréede l'amplicateur. Pour réaliser cette limitation, on exploite le phénomène de saturationà V + = 12 V des amplicateurs opérationnels alimentés en ±15 V, en câblant la mise ensérie de deux gains inverses K = V +
Umax= 6 et 1
K .La réalisation de ce limiteur donne le résultat attendu, comme illustré par la gure
3.1, qui représente sa sortie pour une entrée sinusoïdale. On observe eectivement lalimitation de la tension à Umax = 2 V, et partout ailleurs la sortie du circuit saturateurrecopie son entrée. Le limiteur fonctionne comme prévu.
On relie à présent l'amplicateur et le moteur à la sortie de ce saturateur.
3.2 Étude de la réponse indicielle
3.2.1 Vérication du modèle du capteur de courant
À l'aide du logiciel Olcom, on trace la réponse indicielle de la boucle ouverte aveccapteur de courant, donnée en gure 3.2. Sur la réponse en courant, on relève le tempsde réponse du capteur de courant : il est inférieur à 1 ms, ce qui est très rapide. De plus,il ne présente pas de dépassement par rapport à sa valeur nale. À l'échelle du système,on peut donc considérer que le capteur de courant recopie immédiatement la consigne
avec un gain K = 0, 83.Cette réponse est à comparer avec la réponse simulée par Simulink, représentée gure
2.7. À part un léger dépassement du courant sur la simulation, les deux courbes sesuperposent. On constate que le modèle du capteur de courant cadre bien avec la réalité.
3.2.2 Modélisation des frottements secs
De plus, la réponse indicielle nous permet de mettre en évidence les frottements secs.
26

Fig. 3.1: Vérication du bon fonctionnement du limiteur
Fig. 3.2: Réponse indicielle du système avec capteur de courant. Cette gure est à com-parer avec la réponse théorique du capteur, donnée gure 2.7.
27

Fig. 3.3: Mise en évidence des frottements secs par réponse indicielle du système enboucle ouverte, en utilisant une consigne de courant centrée sur zéro.
Pour ce faire, nous étudions la réponse indicielle en vitesse du moteur en boucle ouverteavec la consigne de courant centrée sur zéro. Celle-ci est représentée gure 3.3. On yobserve une rupture de pente à chaque changement de signe de la vitesse. Cette non-linéarité est due aux frottements secs, qui s'opposent au mouvement dans les deux sensde rotation.Avant le changement de sens, le couple exercé sur l'arbre vaut Cm−Cr
2 , ensuite il vautCm+Cr
2 . La rupture de pente correspond donc à 2 ·Cr. On mesure cette rupture de pentesur la courbe en g. 3.3 : elle vaut ∆ω
∆t = 17, 81 V/s. On en déduit le couple résistantrelatif aux frottements secs :
Cr =12Jeq
∆ω
∆t= 4 · 10−3 N ·m
3.3 Identication du modèle linéaire
À l'aide du module analyse harmonique du logiciel, on trace les diagrammes de Bodede la fonction de transfert vitesse sur consigne de courant dans la plage de 0, 1 Hz à10 Hz.
28

Fig. 3.4: Diagramme de Bode de la fonction de transfert vitesse sur consigne de courant,dans la plage 0, 1 Hz à 10 Hz.
Pour s'assurer de la validité de la mesure, on prend quelques précautions qui permettentau système de rester en régime linéaire : on ajoute un oset de tension à la consigne de courant an d'avoir une vitesse quine s'annule plus (évite les perturbations dues aux frottements secs) ;
on veille à ne pas faire saturer le bloc limiteur de courant ; on adapte l'amplitude de la consigne de courant pour conserver une amplitude de lamesure de vitesse raisonnable.
Le résultat est donné gure 3.4. La modélisation de cette réponse fréquentielle sous laforme d'un premier ordre Kωm
1+τωmp donne une constante de temps τωm ' 16, 1 s et un
gain Kωm = 11, 4 .
3.4 Réalisation du correcteur
On câble le correcteur qu'on a déterminé au paragraphe 2.3.1 : une boucle de vitessede la régulation cascade, avec un régulateur PI caractérisé par K = 9, 5 et Ti = 10 ms.Avec cette régulation, le système ne remplit pas le cahier des charges. En eet, sur sa
réponse indicielle gure 3.5, on observe un dépassement supérieur à 50 % et un tempsde réponse qui avoisine les 50 ms. Néanmoins ces valeurs n'ont aucun sens, vu qu'on aquitté le régime linéaire.Ce défaut s'explique par le fait que l'action intégrale, qui se charge lorsque le courant
29

Fig. 3.5: Câblage du correcteur PI (boucle de vitesse de la régulation cascade) déterminéau paragraphe 2.3.1 (cascade avec K = 9, 5 et Ti = 10 ms)
est saturé, prend du temps à se décharger ensuite. L'action intégrale détériore doncle temps de réponse du système, tout en lui imposant un fort dépassement. La solutionpour remédier à cette imperfection passerait par le gel de l'action intégrale de la boucle de
vitesse tant que l'action proportionnelle sature. Malheureusement, réaliser un tel câblagen'est pas possible sur la maquette.
3.5 Validation du cahier des charges
À cause de la saturation de courant, on ne peut pas réaliser de commande qui satisfassele cahier des charges, celui-ci étant exprimé en régime linéaire. La commande réaliséepermet d'en faire la meilleure approximation, sachant que le moteur donne son maximumpendant les phases de saturation.
30
Recommended