AUTOMATIZACIJA PARKINGA KORIŠTENJEM PLC UREĐAJA
AUTOMATIZATION OF CAR PARKING USING PLC DEVICE
Miroslav Kostadinović, Saobraćajni fakultet, Doboj
Zlatko Bundalo, Elektrotehnički fakultet, Banja Luka
Dušanka Bundalo, Nova banjalučka banka, Banja Luka
Danijel Dragičević, Saobraćajni fakultet, Doboj
Sadržaj – U radu se opisuje postupak praktične realizacije sistema automatskog upravljanja
parkingom sa Siemensovim PLC-om, uz pomoć WinPLC-V4 alata za projektovanje. Pored
automatizacije ulazno-izlaznih vrata parkinga omogućeno je i statističko praćenje rada, kao i
javljanje GPS satelitu kada je parking prostor slobodan. Napisani program prije upisivanja u
Siemensov PLC testiran je u WinPLC simulatoru, a pomoću WinPLC analizatora omogućeno je
praćenja rada ulazno-izlaznih signala.
Abstract – The procedure of practical realization of system for automatic control of car parking
with Siemens PLC, using WinPLC-V4 design tool is described in the paper. In addition to
automatization of entrance and exit doors of car parking it is also enabled statistical monitoring of
operation and informing via GPS satellite when the car parking is not full. The written program
has been tested by WinPLC simulator before writing it into Siemens PLC, and by WinPLC
analizator it is possible to monitor operation of input-output signals.
1. UVOD
Automatizacija upravljanja parking prostorom postaje
sve veća i značajnija potreba, posebno u velikim naseljima
sa naglim porastom broja vozila. Rješenja i sistemi koji to
omogućavaju povećavaju efikasnost korištenja
raspoloživih parking prostora, a smanjuju probleme i
troškove koji se pojavljuju u klasičnim neautomatizovanim
pristupima korištenja parkinga.
U ovom radu se opisuje postupak praktične realizacije
sistema za automatsko upravljanje parkingom sa
Siemensovim PLC-om. Pri tom se koristi WinPLC-V4
alat za projektovanje. Pored automatizacije ulazno-
izlaznih vrata parkinga realizovano rješenje omogućava i
statističko praćenje rada, kao i javljanje GPS satelitu kada
je parking prostor slobodan (nije popunjen). Napisani
program je prije upisivanja u Siemensov PLC testiran u
WinPLC simulatoru, a pomoću WinPLC analizatora
omogućeno je praćenja rada ulazno-izlaznih signala.
Sistem koji se razmatra u ovom radu konceptualno se
dijeli na tri nivoa: logički nivo, nivo sigurnosti i apstraktni
hardverski nivo. Ovo dozvoljava da izdvojimo detalje
implementacije (apstraktni hardverski nivo) i dizajn
algoritma (logički nivo). U mogućnosti smo da se
fokusiramo na specifičnost komunikacionog interfejsa
između ova dva nivoa koji dozvoljava samo sigurno
ponašanje sistema. Ovaj interfejs sačinjava nivo sigurnosti.
Za nivo sigurnosti identifikujemo i definišemo broj
zahtjeva. Oni se provjeravaju i izvještava se o njima.
Takođe ćemo razmotriti i analizu specifikacije nivoa
sigurnosti sa jednostavnim korisničkim alatom za
vizualizaciju. Ovaj alat pomaže da dobijemo važna
uočavanja tokom specifikacije i analize nivoa sigurnosti.
Cilj je da opišemo nivo sigurnosti koji pristaje između
eventualnih algoritama položaja i algoritama pretraživanja
i da sumiramo hardver potreban za automatizovani
parking. Ovaj nivo mora dozvoliti samo sigurne i legalne
instrukcije i izvjestiti o njihovom uspjehu ili neuspjehu.
Zbog toga se uvodi arhitektura sa tri nivoa koja se sastoji od
logičkog nivoa (LL), nivoa sigurnosti (SL) i apstraktnog
hardverskog nivoa (HAL). Sa koceptualnom podjelom na nivoe,
nivo sigurnosti obezbjeđuje sigurno funkcionisanje sistema
nezavisno od pojedinačnih algoritama koji su implementirani.
2. OPIS PRAKTIČNE REALIZACIJE
Pri projektovanju jednog ovakvog sistema potrebno je
donijeti odluku o osnovnim karakteristikama koje korišteni PLC
treba da ima. Na taj način definiše se dobra osnova kako za
početak projektovanja arhitekture tako i za efikasnu podjelu
poslova po resursima i vremenu. S obzirom da je sam zadatak
dat u slobodnoj formi, zahtjevi mogu da se opišu sa velikim
stepenom slobode. Iako time projektant dobija veće mogućnosti
da se kreativno izrazi, odgovornost koju preuzima je veća. U
ovom slučaju riječ je o projektu kod koga se ne očekuju
problemi vezani za brzinu rada. Kao osnovni kriterijum biće
razmatrana cijena. Pri tome je potrebno obezbjediti pouzdanost i
umjerenu potrošnju energije.
Osnovu projektovanog sistema za automatizaciju upravljanja
parking prostorom čini PLC koji upravlja radom sistema,
senzori - registruju prolaz vozila, motori - upravljaju radom
ulaznih i izlaznih vrata parkinga, semafor - obavještava o stanju
parkinga (da li je pun ili ima slobodnih mjesta) i udaljeni
računar PC tipa- ima dvije funkcije (prati statistiku, tj. ukupan
promet vozila kroz parking i stanje parkinga). Ukoliko je
parking slobodan (ima slobodnih mjesta) računar će da
proslijedi tu informaciju GPS satelitu, koji će da obavjesti
učesnike u saobraćaju o slobodnom parking prostoru. Jedan
parking prostor može da funkcioniše samostalno, a može se
upravljati i sa više povezanih parkinga.
Za veliki broj projektanata, najefikasniji način projektovanja
predstavlja razbijanje cjelokupne logike na dijelove koji se
mogu implementirati u vidu konačnih automata. Ovom
metodom garantuje se minimalan broj logičkih funkcija za svaki
logički blok, čime se direktno utiče na smanjenje složenosti. Na
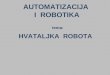
slici 1. prikazana je šema logičkog nivoa sistema za
automatizaciju parkinga.
2
Aktiviranjem zvučnog senzora1 (senzora kretanja tj.
prisustva automobila na ulazu parkinga) setuje se flip-flop1
i tajmer 1. Izlazi ova dva kola vode se na ulaze jednog
logičkog I kola, a zatim se taj signal prosljeđuje motoru
zaduženom za otvaranje ulaznih vrata parkinga. Setovanje
RS flip-flopa1 utiče na blokiranje rada flip-flopa2, čime je
onemogućeno i istovremeno aktiviranje motora2 koji je zadužen
za zatvaranje ulaznih vrata parkinga. Tajmer se u ovom slučaju
koristi kako bi bilo omogućeno automatsko zatvaranje ulaznih
vrata i u slučaju da vozilo aktivira zvučni senzor1, a vozač ipak
odluči da ne ulazi na parking.
&
&
=
=
=
=
=
=
S
R
Q
S
R
Q
S
R
Q
S
R
Q
S
R
Q
S
R
Q
CU
CD
CU
I 50
I 50Q PC
PC
1
1
Zvučni senzor 1
Zvučni senzor 2
Foto-električni
senzor 1
Foto-električni
senzor 2
Flip-flop 1
Flip-flop 2
Flip-flop 3
Flip-flop 4
Tajmer 1
Tajmer 2
Brojač 1
I - kolo
I - kolo
ILI - kolo
ILI - kolo
Brojač 2
Motor 1
Motor 2
Motor 3
Motor 4
Zeleno svjetlo
Crveno svjetlo
Slika 1. Šema logičkog nivoa sistema za automatizaciju upravljanja parkingom.
Kada cijelo vozilo prođe kroz vrata parkinga aktiviraće
se foto-električni senzor1. Aktiviranjem ovog senzora
zaustavlja se brojanje tajmera1 i njegova vrijednost
postavlja se na nulu što utiče na stanje flip-flopa2.
Setovanjem flip-flopa2 resetuje se flip-flop1 i prosljeđuje
signal na logičko ILI kolo, čime je omogućeno
uključivanje motora2 tj. zatvaranje ulaznih vrata parkinga.
Aktiviranjem foto-električnog senzora1 dolazi do
inkrementiranja brojača1 koji je zadužen za praćenje
statistike (brojanje) prometa vozila kroz parking.
Brojač2 je zadužen za praćenje stanja unutar parkinga.
Ukoliko je stanje tog brojača veće ili jednako kapacitetu
parkinga (u našem primjeru to je 50 vozila) uključena je
crvena signalna lampica koja vozačima pokazuje da je
parking pun-nema slobodnih mjesta. Ako je stanje tog
brojača manje od 50 uključena je zelena signalna lampica.
Zelena signalna lampica ima dvostruku ulogu. Pored toga
što korisnika obavještava da je parking prostor slobodan-
da ima slobodnih mjesta, taj podatak se javlja i udaljenom
PC računaru. Računar tu informaciju postavlja na GPS
satelit i preko satelita obavještava učesnike u saobraćaju
kada i gdje se nalazi slobodno mjesto za parkiranje vozila.
Veza između PLC-a i udaljenog računara može da bude
žičana veza, radio veza ili da se kontakt ostvaruje putem SMS
poruke.
Postupak za aktiviranje izlaznih vrata je vrlo sličan, gotovo
identičan. Razlika je u tome što aktiviranje foto-električnog
senzora2 prilikom zatvaranja izlaznih vrata (pri izlasku vozila sa
parkinga) dovodi do dekrementiranja stanja brojača2 i umanjuje
informaciju o broju vozila na parkingu za jedan.
3. WinPLC7 SIMULATOR
U ovom dijelu će biti opisano kako se kreira i simulira
WinPLC7 program i kako se on prenosi na korišteni PLC.
Prilikom kreiranja novog projekta prolazi se kroz sljedeće
korake:
kreiranje novog projekta,
kreiranje liste simbola odnosno operanada,
kreiranje OB1 objekta,
biranje ciljnog sistema (PLC simulator ili eksterni S7 PLC),
prenos softvera na ciljni sistem,
nadgledanje izvršavanja programa,
status promjenljivih (nadgledanje promjenljivih).
86
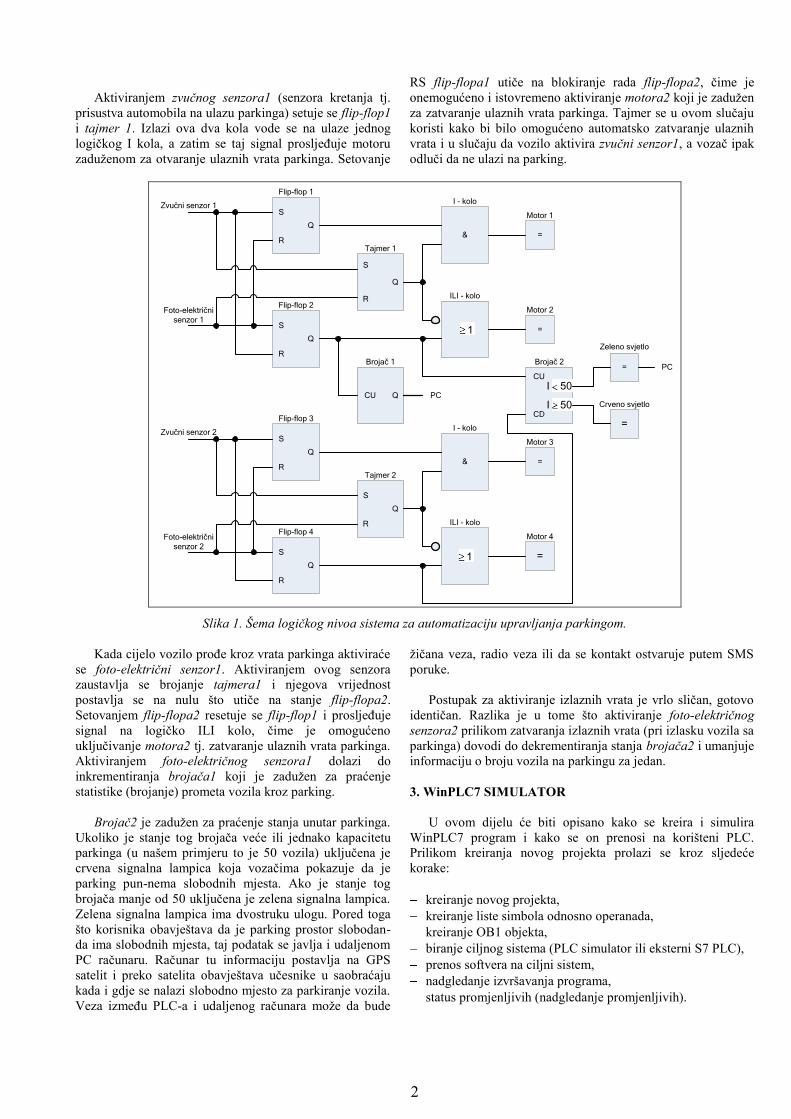
Kada se pokrene WinPLC7 pojavi se ”Quick start
prozor”. Klikne se na taster ”Create new project” kako bi
se kreirao novi projekat, te se u ulazni prozor upisuje ime
novog projekta i potvrđuje sa ”OK”, što se vidi na slici 2.
Slika 2. Prozor koji prikazuje kreirani projekat.
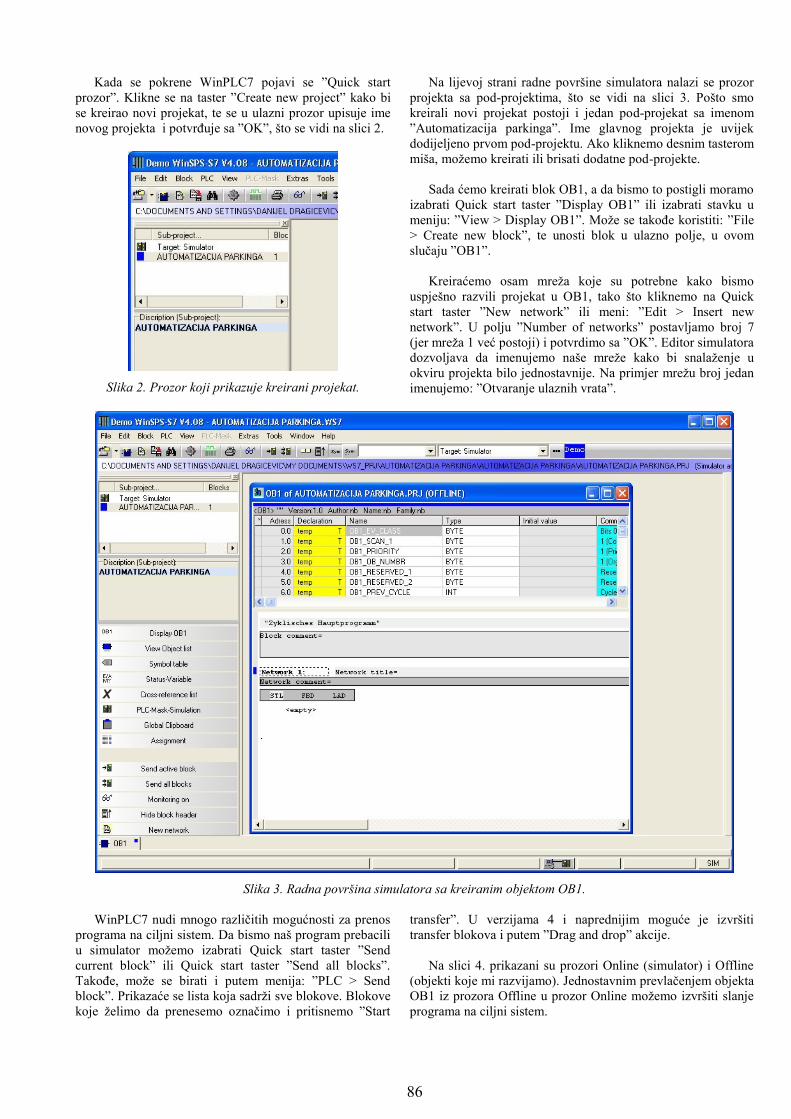
Na lijevoj strani radne površine simulatora nalazi se prozor
projekta sa pod-projektima, što se vidi na slici 3. Pošto smo
kreirali novi projekat postoji i jedan pod-projekat sa imenom
”Automatizacija parkinga”. Ime glavnog projekta je uvijek
dodijeljeno prvom pod-projektu. Ako kliknemo desnim tasterom
miša, možemo kreirati ili brisati dodatne pod-projekte.
Sada ćemo kreirati blok OB1, a da bismo to postigli moramo
izabrati Quick start taster ”Display OB1” ili izabrati stavku u
meniju: ”View > Display OB1”. Može se takođe koristiti: ”File
> Create new block”, te unosti blok u ulazno polje, u ovom
slučaju ”OB1”.
Kreiraćemo osam mreža koje su potrebne kako bismo
uspješno razvili projekat u OB1, tako što kliknemo na Quick
start taster ”New network” ili meni: ”Edit > Insert new
network”. U polju ”Number of networks” postavljamo broj 7
(jer mreža 1 već postoji) i potvrdimo sa ”OK”. Editor simulatora
dozvoljava da imenujemo naše mreže kako bi snalaženje u
okviru projekta bilo jednostavnije. Na primjer mrežu broj jedan
imenujemo: ”Otvaranje ulaznih vrata”.
Slika 3. Radna površina simulatora sa kreiranim objektom OB1.
WinPLC7 nudi mnogo različitih mogućnosti za prenos
programa na ciljni sistem. Da bismo naš program prebacili
u simulator možemo izabrati Quick start taster ”Send
current block” ili Quick start taster ”Send all blocks”.
Takođe, može se birati i putem menija: ”PLC > Send
block”. Prikazaće se lista koja sadrži sve blokove. Blokove
koje želimo da prenesemo označimo i pritisnemo ”Start
transfer”. U verzijama 4 i naprednijim moguće je izvršiti
transfer blokova i putem ”Drag and drop” akcije.
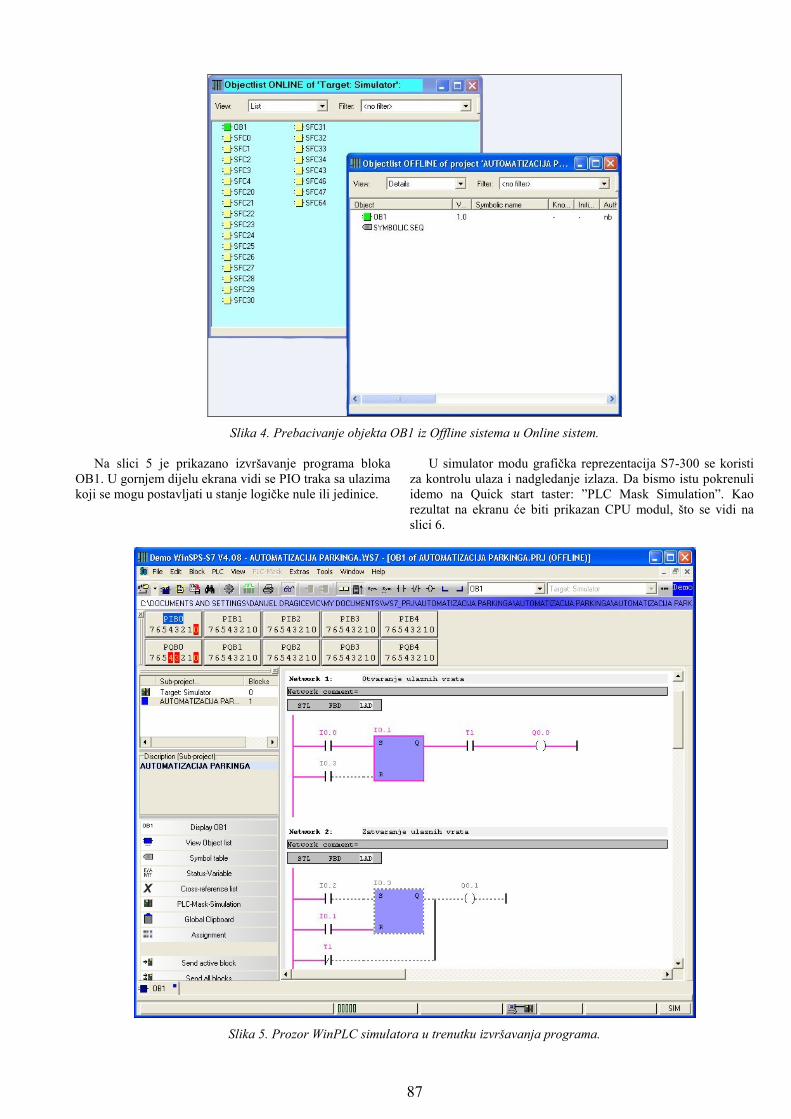
Na slici 4. prikazani su prozori Online (simulator) i Offline
(objekti koje mi razvijamo). Jednostavnim prevlačenjem objekta
OB1 iz prozora Offline u prozor Online možemo izvršiti slanje
programa na ciljni sistem.
87
Slika 4. Prebacivanje objekta OB1 iz Offline sistema u Online sistem.
Na slici 5 je prikazano izvršavanje programa bloka
OB1. U gornjem dijelu ekrana vidi se PIO traka sa ulazima
koji se mogu postavljati u stanje logičke nule ili jedinice.
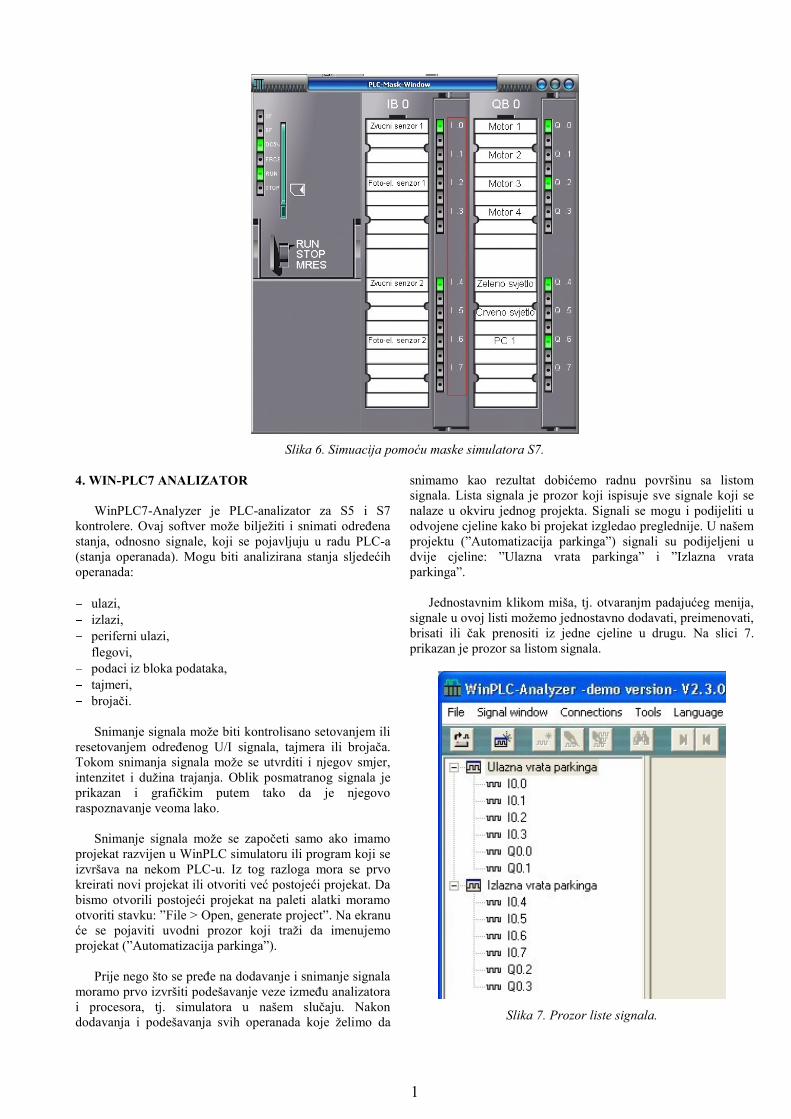
U simulator modu grafička reprezentacija S7-300 se koristi
za kontrolu ulaza i nadgledanje izlaza. Da bismo istu pokrenuli
idemo na Quick start taster: ”PLC Mask Simulation”. Kao
rezultat na ekranu će biti prikazan CPU modul, što se vidi na
slici 6.
Slika 5. Prozor WinPLC simulatora u trenutku izvršavanja programa.
1
Slika 6. Simuacija pomoću maske simulatora S7.
4. WIN-PLC7 ANALIZATOR
WinPLC7-Analyzer je PLC-analizator za S5 i S7
kontrolere. Ovaj softver može bilježiti i snimati određena
stanja, odnosno signale, koji se pojavljuju u radu PLC-a
(stanja operanada). Mogu biti analizirana stanja sljedećih
operanada:
ulazi,
izlazi,
periferni ulazi,
flegovi,
podaci iz bloka podataka,
tajmeri,
brojači.
Snimanje signala može biti kontrolisano setovanjem ili
resetovanjem određenog U/I signala, tajmera ili brojača.
Tokom snimanja signala može se utvrditi i njegov smjer,
intenzitet i dužina trajanja. Oblik posmatranog signala je
prikazan i grafičkim putem tako da je njegovo
raspoznavanje veoma lako.
Snimanje signala može se započeti samo ako imamo
projekat razvijen u WinPLC simulatoru ili program koji se
izvršava na nekom PLC-u. Iz tog razloga mora se prvo
kreirati novi projekat ili otvoriti već postojeći projekat. Da
bismo otvorili postojeći projekat na paleti alatki moramo
otvoriti stavku: ”File > Open, generate project”. Na ekranu
će se pojaviti uvodni prozor koji traži da imenujemo
projekat (”Automatizacija parkinga”).
Prije nego što se pređe na dodavanje i snimanje signala
moramo prvo izvršiti podešavanje veze između analizatora
i procesora, tj. simulatora u našem slučaju. Nakon
dodavanja i podešavanja svih operanada koje želimo da
snimamo kao rezultat dobićemo radnu površinu sa listom
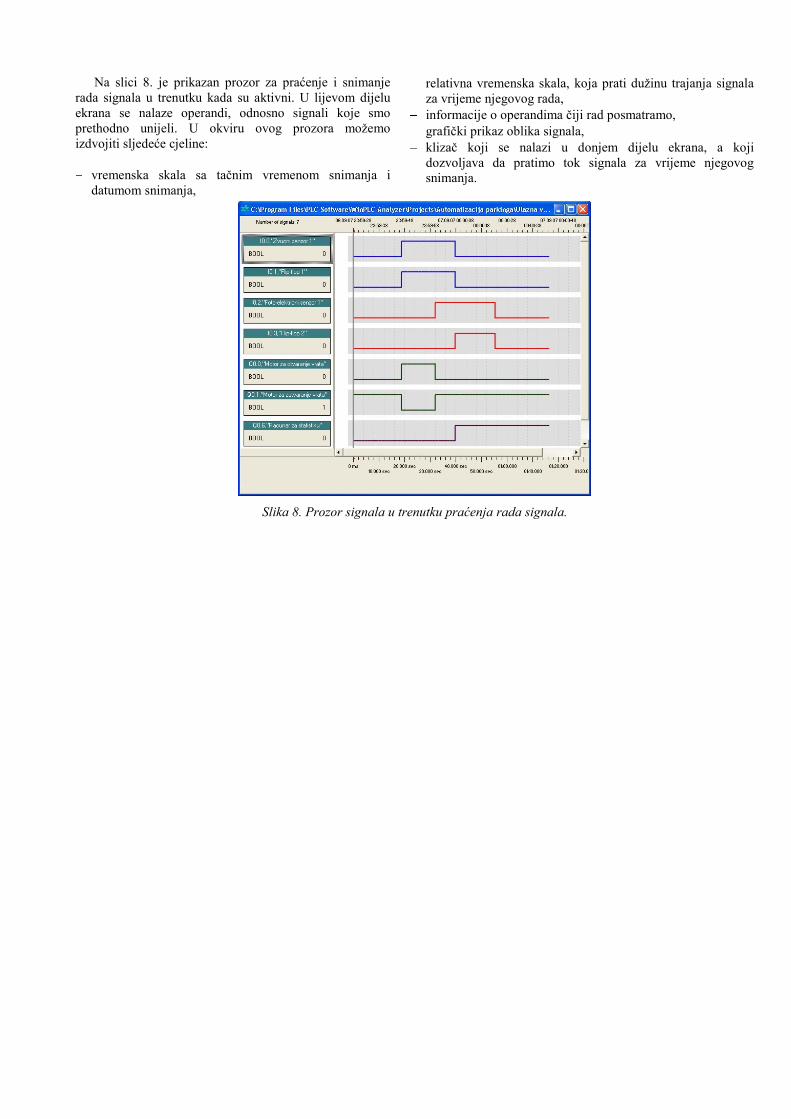
signala. Lista signala je prozor koji ispisuje sve signale koji se
nalaze u okviru jednog projekta. Signali se mogu i podijeliti u
odvojene cjeline kako bi projekat izgledao preglednije. U našem
projektu (”Automatizacija parkinga”) signali su podijeljeni u
dvije cjeline: ”Ulazna vrata parkinga” i ”Izlazna vrata
parkinga”.
Jednostavnim klikom miša, tj. otvaranjm padajućeg menija,
signale u ovoj listi možemo jednostavno dodavati, preimenovati,
brisati ili čak prenositi iz jedne cjeline u drugu. Na slici 7.
prikazan je prozor sa listom signala.
Slika 7. Prozor liste signala.
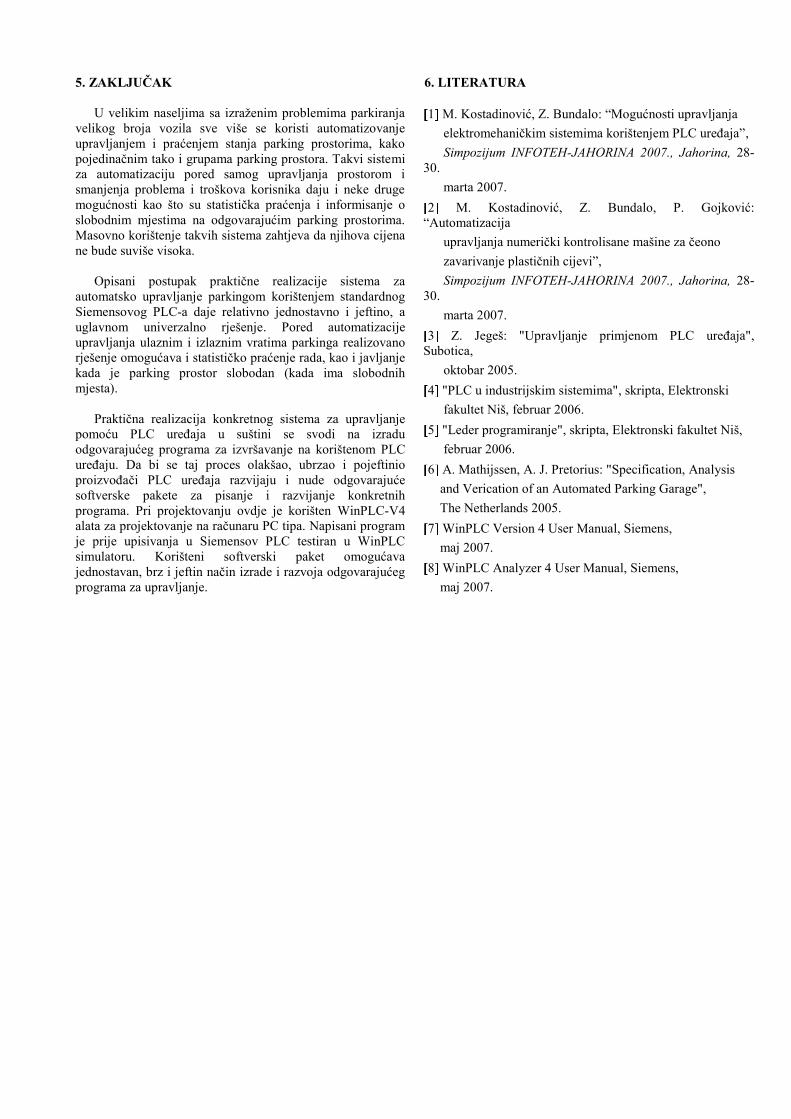
Na slici 8. je prikazan prozor za praćenje i snimanje
rada signala u trenutku kada su aktivni. U lijevom dijelu
ekrana se nalaze operandi, odnosno signali koje smo
prethodno unijeli. U okviru ovog prozora možemo
izdvojiti sljedeće cjeline:
vremenska skala sa tačnim vremenom snimanja i
datumom snimanja,
relativna vremenska skala, koja prati dužinu trajanja signala
za vrijeme njegovog rada,
informacije o operandima čiji rad posmatramo,
grafički prikaz oblika signala,
klizač koji se nalazi u donjem dijelu ekrana, a koji
dozvoljava da pratimo tok signala za vrijeme njegovog
snimanja.
Slika 8. Prozor signala u trenutku praćenja rada signala.
5. ZAKLJUČAK
U velikim naseljima sa izraženim problemima parkiranja
velikog broja vozila sve više se koristi automatizovanje
upravljanjem i praćenjem stanja parking prostorima, kako
pojedinačnim tako i grupama parking prostora. Takvi sistemi
za automatizaciju pored samog upravljanja prostorom i
smanjenja problema i troškova korisnika daju i neke druge
mogućnosti kao što su statistička praćenja i informisanje o
slobodnim mjestima na odgovarajućim parking prostorima.
Masovno korištenje takvih sistema zahtjeva da njihova cijena
ne bude suviše visoka.
Opisani postupak praktične realizacije sistema za
automatsko upravljanje parkingom korištenjem standardnog
Siemensovog PLC-a daje relativno jednostavno i jeftino, a
uglavnom univerzalno rješenje. Pored automatizacije
upravljanja ulaznim i izlaznim vratima parkinga realizovano
rješenje omogućava i statističko praćenje rada, kao i javljanje
kada je parking prostor slobodan (kada ima slobodnih
mjesta).
Praktična realizacija konkretnog sistema za upravljanje
pomoću PLC uređaja u suštini se svodi na izradu
odgovarajućeg programa za izvršavanje na korištenom PLC
uređaju. Da bi se taj proces olakšao, ubrzao i pojeftinio
proizvođači PLC uređaja razvijaju i nude odgovarajuće
softverske pakete za pisanje i razvijanje konkretnih
programa. Pri projektovanju ovdje je korišten WinPLC-V4
alata za projektovanje na računaru PC tipa. Napisani program
je prije upisivanja u Siemensov PLC testiran u WinPLC
simulatoru. Korišteni softverski paket omogućava
jednostavan, brz i jeftin način izrade i razvoja odgovarajućeg
programa za upravljanje.
6. LITERATURA
1 M. Kostadinović, Z. Bundalo: “Mogućnosti upravljanja
elektromehaničkim sistemima korištenjem PLC uređaja”,
Simpozijum INFOTEH-JAHORINA 2007., Jahorina, 28-
30.
marta 2007.
2 M. Kostadinović, Z. Bundalo, P. Gojković:
“Automatizacija
upravljanja numerički kontrolisane mašine za čeono
zavarivanje plastičnih cijevi”,
Simpozijum INFOTEH-JAHORINA 2007., Jahorina, 28-
30.
marta 2007.
3 Z. Jegeš: "Upravljanje primjenom PLC uređaja",
Subotica,
oktobar 2005.
4 "PLC u industrijskim sistemima", skripta, Elektronski
fakultet Niš, februar 2006.
5 "Leder programiranje", skripta, Elektronski fakultet Niš,
februar 2006.
6 A. Mathijssen, A. J. Pretorius: "Specification, Analysis
and Verication of an Automated Parking Garage",
The Netherlands 2005.
7 WinPLC Version 4 User Manual, Siemens,
maj 2007.
8 WinPLC Analyzer 4 User Manual, Siemens,
maj 2007.
Recommended