Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
41
CAPÍTULO II
2.1. Elementos básicos de uma fotografia Para a realização de qualquer medida por meio de técnica
fotogramétrica é necessário que sejam definidos referenciais, cujo
estabelecimento exige sua definição seguida da correspondente
materialização do sistema. Como descrito anteriormente, o sistema de
lentes é um dos elementos que compõem as câmaras.
2.1.1. Sistemas de referência
A Figura 2.1 ilustra o sistema de lentes de uma câmara e os espaços
envolvidos nas medidas fotogramétricas.
Figura 2.1. (a) Espaço-imagem e espaço-objeto. (b) Sistema de lentes.
(a) (b)

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
42De acordo com a Figura 2.1a, são dois os espaços envolvidos na
Fotogrametria, isto é, o espaço imagem e o espaço objeto. O espaço objeto
compreende todo levantamento ou medida realizada sobre a superfície física
(terreno topográfico), cujos referenciais mais utilizados nas Ciências
Geodésicas são: referencial geodésico; referencial geodésico cartesiano; e
referencial cartesiano local.
2.1.1. Referenciais do espaço objeto
2.1.1.1. Sistema de referência geodésico
No referencial geodésico (Figura 2.2) a latitude φ e a longitude λ são
definidas sobre um elipsóide escolhido arbitrariamente como Datum do
sistema geodésico (LUGNANI, 1987). Há ainda uma terceira coordenada
conhecida como altura geométrica h.
Figura 2.2. Referencial geodésico.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
43A latitude φ de um ponto P é o ângulo entre a normal ao elipsóide
passando por P e sua projeção no equador, variando de 0 a 90o graus ao
norte e de 0 a -90o graus ao sul. A longitude λ é o ângulo diedro entre o
meridiano origem (Greenwich) e o meridiano do ponto, variando de 0 a 180o
graus a leste e de 0 a -180o graus a oeste. A altura geométrica h é a
distância contada sobre a normal do ponto considerado, a partir deste ponto
até a superfície do elipsóide.
2.1.1.2. Sistema de referência geodésico cartesiano
O referencial geodésico cartesiano (Figura 2.3) é um sistema
tridimensional de coordenadas cartesianas, cuja origem é o centro do
elipsóide geodésico.
Figura 2.3. Referencial geodésico cartesiano.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
44Este sistema é definido como segue (LUGNANI, 1987):
• Origem: centro do elipsóide geodésico;
• Eixo OZ: coincidente com o eixo de rotação do elipsóide geodésico,
sentido positivo para o pólo norte geodésico (PN);
• Eixo OX: coincidente com a intersecção do plano do meridiano de
Greenwich com o plano do Equador, sentido positivo para o
meridiano de Greenwich; e
• Eixo OY: é tal que torna o sistema dextrógiro.
2.1.1.3. Sistema de referência cartesiano local
Figura 2.4. Referencial cartesiano local.
O referencial cartesiano local, ilustrado na Figura 3.4, é definido na
forma que segue (LUGNANI, 1987).

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
45• Origem: é estabelecida sobre a normal ao elipsóide passando pela
estação de observação, sendo geralmente tomada sobre o
elipsóide, geóide ou nas imediações da superfície física;
• Eixo Oz: é coincidente com a normal ao elipsóide na origem O',
sentido positivo oposto ao centro do elipsóide geodésico (O');
• Eixo Oy: mesmo sentido do norte geodésico; e
• Eixo Ox: ortogonal ao eixo OY no sentido que torne o sistema
dextrógiro.
A seguir serão vistos os referenciais do espaço-imagem.
2.1.2. Referenciais do espaço imagem
Se as observações forem feitas no negativo fotográfico, o espaço
imagem será a região compreendida entre o ponto nodal posterior até o plano
do negativo. Porém se as observações forem realizadas no diapositivo (plano
positivo), o espaço imagem será delimitado entre o ponto nodal anterior e o
plano do diapositivo.
O CP da câmara é uma abstração pontual do sistema de lentes, cuja
projeção ortogonal no plano da fotografia (negativo ou positivo) define o
ponto principal (pp), que será tratado mais adiante. A distância entre o CP
da câmara e o plano da fotografia é denominada de distância focal da
câmara (f), que para fins de medidas acuradas deve ser calibrada por meio
de um processo denominado de calibração de câmaras, cujas definições e
técnicas também serão estudadas futuramente.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
46De acordo com a Figura 2.1, quando utilizado o plano negativo a
distância focal é positiva (+f) e quando utilizado o plano positivo, a
distância focal é negativa (-f). Os referenciais do espaço imagem mais
usuais na Fotogrametria são:
• Referencial fiducial;
• Referencial fotográfico; e
• Referencial digital.
2.1.2.1. Sistema de referência fiducial
O sistema de coordenadas de referência fiducial é um sistema
cartesiano bidimensional construído a partir da intersecção entre as marcas
fiduciais (Fig. 2.5a) opostas de uma fotografia tomada com câmara métrica
convencional, que define o Centro Fiducial (CF) da fotografia (Fig. 2.5b), ou
seja, a origem do sistema de referência fiducial. As marcas fiduciais são
impressas pelo cone interno da câmara métrica convencional (Fig. 2.5c), no
instante da tomada da fotografia. Geralmente, as câmaras métricas
possuem de 4 a 8 marcas fiduciais, a partir das quais se materializa o
sistema fiducial. A Figura 2.5. mostra os elementos supracitados.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
47Figura 2.5. (a) Marca fiducial. (b) Sistema de referência fiducial. (c) Cone
da câmara métrica convencional.
(a) (b)
(c)
Onde, • CF: origem do sistema de referência fiducial, denominado de centro
fiducial;
• eixo CFx’: orientado positivamente para o sentido de vôo, sendo
paralelo à linha fiducial que melhor se aproxima da linha de vôo;
• eixo CFy’: é orientado a partir do eixo CFx’ com uma rotação anti-
horária de 90o graus (sistema dextrógiro);
1 2
3 4
x’
y’ y’
δMarca
fiducial p’
CF

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
48• p’: ponto imagem com coordenadas no sistema referencial fiducial
( '' , pp yx ); e
• δ: é o angulo de não ortogonalidade entre os eixos x’ e y’. O ângulo
pode ser determinado pela expressão da tangente, dado por
= '
'
arctanp
p
xy
δ .
A seguir será apresentado o sistema de referência fotogramétrico.
2.1.2.2. Sistema de referência fotogramétrico
O referencial fotogramétrico, ou fotográfico, é um sistema cartesiano
tridimensional. De acordo com a figura 2.6 a orientação dos eixos CPx e
CPy é paralela, respectivamente, aos eixos CFx’ e CFy’ do referencial
fiducial. O eixo CPz é coincidente com o eixo ótico da câmara, cujo sentido
é tal que torna o sistema dextrógiro. A origem do sistema fotogramétrico é o
centro de projeção do sistema de lentes, ou seja, o ponto nodal anterior,
caso se esteja trabalhando com o diapositivo, ou, o ponto nodal posterior se
for utilizado o negativo. Como a coordenada z é constante e igual à
distância focal da câmara, utiliza-se um referencial plano cuja origem é o
ponto principal (pp).

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
49Figura 2.6. Sistema de referência fotogramétrico.
Onde, • CP: centro perspectivo da câmara, considerado para fins de
simplificação como uma abstração pontual do sistema de lentes;
• f : distância focal calibrada da câmara;
• pp: ponto principal definido pelo ponto de intersecção entre a
projeção ortogonal do CP da câmara e o plano fotográfico, com
coordenadas ( )0,, pppp yx ; e
• vr : vetor posição no espaço-imagem definido por 'CPpv =r
, ou
seja, ( )fyyxxv pppppp −−−= ,, ''r.
2.1.2.3. Sistema de referência digital
Como descrito anteriormente, uma imagem digital é um conjunto de
elementos de imagem espacialmente ordenados em um arranjo matricial,
cuja posição é dada por (C, L), sendo que a cada elemento de imagem

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
50(pixel) é associado um nível de cinza. O sistema de referência digital é
usualmente definido na forma que segue:
• Origem (O): a origem do sistema é o canto superior esquerdo;
• eixo OC: direção horizontal e sentido positivo para a direita;
• Eixo OL: rotacionado 90o graus em relação ao eixo OC, sentido
horário (sistema levógiro);
• C,L: coluna e linha, respectivamente.
Figura 2.7. Sistema de referência digital.
Como descrito anteriormente, a tarefa fotogramétrica se restringe em
converter dados de entrada em arquivos de saída. Usualmente, os dados
de entrada são imagens adquiridas por sensores e os arquivos de saída
consistem em produtos, como por exemplo, um mapa ou carta topográfica.
Por isso, é necessário entender as diferenças básicas entre os dados
manipulados na Fotogrametria.
C
L
O

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
512.2. Diferença entre imagem e mapa
Como descrito anteriormente, a tarefa fotogramétrica consiste em
converter dados de entrada em arquivos de saída. Usualmente, os dados
de entrada se restringem em imagens ou fotografias, para gerar como saída
um mapa ou carta topográfica. Entretanto, existem diferenças entre os
produtos manipulados fotogrametricamente. A Figura 2.8 apresenta as
principais diferenças entre imagem e mapa.
Figura 2.8. (a) Diferença entre imagem e mapa. (b) Deslocamento radial.
(c) Escala variante ponto-a-ponto.
(a) (b)
(c)
Ao visualizar a Figura 2.8a se verifica as diferenças básicas entre
imagem e mapa, isto é, a imagem possui uma projeção perspectiva, pois os
pontos A, B, C, D, E convergem para o CP da câmara e seu imageamento
Objeto imageado no centro da
imagem
Objeto imageado
afastado do centro da imagem

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
52ocorre no sentido inverso de sua posição no terreno, enquanto o mapa
possui uma projeção ortogonal, pois todos os pontos são alocados no mapa
na mesma posição em que se encontram na superfície física mantendo a
mesma distância entre eles, caso que não ocorre para os pontos
imageados na imagem, pois como pode ser visto na Figura 2.8a, os pontos
a, b, c, d, e não possuem a mesma distância que seus correspondentes na
superfície física, ou seja, ab é diferente de AB . A imagem possui uma
riqueza de informações superior àquela encontrada nos mapas e cartas
topográficas, que possibilita a interpretação do usuário com maior facilidade
e sem a necessidade de simbologia. As informações encontradas no mapa
são implícitas e simbólicas, enquanto que na imagem são explícitas e sem
nenhum atributo que as definem a priori.
O mapa possui escala constante e a imagem possui uma variação de
escala ponto-a-ponto, pois quanto mais próximo o objeto na superfície física
do CP da câmara, maior será a escala do objeto imageado (ver Figura
2.8c), devido a característica perspectiva da imagem.
O deslocamento devido ao relevo e à altura das edificações e
vegetação também são características importantes da imagem. Na Figura
2.8b, verifica-se que, no momento da tomada de uma fotografia um edifício
se encontra próximo ao centro da imagem (na direção do eixo óptico da
câmara) e outro afastado do centro da imagem ou fotografia. Neste caso,
para o objeto mais próximo do centro da imagem é possível visualizar o
topo e uma pequena porção de sua fachada lateral da edificação, ou seja, a
distorção é mínima; enquanto que para o objeto mais afastado pode ser
visualizado o topo e sua fachada lateral, mostrando o deslocamento radial
ocorrido devido à altura da edificação e também ao afastamento que se
encontra em relação ao centro da imagem. A seguir será enfatizado um
estudo sobre o deslocamento devido ao relevo.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
53
2.2.1. Estudo do deslocamento devido ao relevo
Nesta seção será realizado um estudo teórico sobre os aspectos
relativos ao deslocamento devido ao relevo, sombras e ângulo de abertura
da câmara, cujos fatores provocam oclusões na imagem.
2.2.1.1 Deslocamento Devido ao Relevo
Oclusões são os maiores obstáculos para a automação dos
processos fotogramétricos. O deslocamento devido ao relevo nas
edificações causa um tipo de oclusão, de característica visual,
caracterizado pela própria geometria da perspectiva central, ocorrendo
radialmente em relação ao nadir. Com isto, o algoritmo de correlação
automática não encontra correspondência em alguns pontos nas imagens
sobrepostas, tendo então que realizar uma interpolação para todos os
pontos que não são correlacionados (pontos críticos), gerando pontos que
representam uma área maior que a edificação.
O processo de geração de Modelos Digitais de Terreno (MDT) já se
encontra com um grau avançado de automação, porém não se preocupa
com a correção do deslocamento devido ao relevo que gera dados não
confiáveis na representação das edificações, pois são ferramentas
desenvolvidas para modelar, especificamente, pontos de terreno. A Figura
2.9 ilustra o deslocamento devido ao relevo, enfatizando casos de
edificações.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
54Figura 2.9. Deslocamento devido ao relevo.
(a) (b)
Onde,
• ra, rb: distância radial na imagem (dada entre o nadir e o ponto);
• Ra, Rb: distância radial no terreno
• ∆r: é o deslocamento do objeto na imagem;
• ∆R: é o deslocamento do objeto no terreno;
• ∆H: é a altura da edificação; e
• Hv: altura de vôo.
Considerando a relação de triângulos apresentada na figura 3.11,
tem-se que o deslocamento devido ao relevo no espaço imagem é dado
pela equação abaixo:
bv
rHHr ∆
=∆ (2.1)
Sendo,
• rb: 22
bb yx + .

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
55 A correção deve ser feita, teoricamente, da base para o topo, pois a
informação de interesse é o topo da edificação. A partir da equação (2.1)
pode-se calcular o deslocamento radial da base (a) para que seja aplicada
a correção do Modelo gerado, através de:
av
rHHr ∆
=∆ (2.2)
Onde,
• ra: 22
aa yx + .
Considerando a figura 2.9b, podemos escrever a relação de
triângulos, desenvolvendo o seguinte modelo matemático para o cálculo de
dx:
xr
dxr a=
∆ (2.3)
xrrdxa
∆= (2.4)
Onde,
• dx : relação entre deslocamento do objeto na imagem e a distância
radial do nadir à base da edificação na direção x. Uma formulação
análoga vale para dy . Assim, pode ser realizada a correção
através de:

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
56
dyyydxxx
at
at
+=+=
(2.5)
2.2.1.2 Sombras
A sombra é um tipo de elemento que também gera oclusões na
imagem, sendo considerada um obstáculo no processo automático de
medidas de pontos homólogos. As sombras podem ser provocadas por
nuvens, feições naturais (vegetação etc.) e feições antrópicas (edificações,
veículos etc.). A Figura 2.10 mostra uma edificação que projeta sombra no
terreno.
Figura 2.10. Presença de sombras na tomada de imagens aéreas. (a)
Sombra projetada por um veículo. (b) Sombra projetada pela edificação. (c)
Sombra projetada pela vegetação.
(a) (b)
(c)

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
57
Um caso bastante comum em imagens aéreas é a presença de
sombras projetadas por vegetação que cobrem parte das edificações, como
pode ser visto na Figura 2.11.
Figura 2.11. Oclusões provocadas pela presença de sombra projetada
sobre edificações. (a) Imagem. (b) Esquema gráfico.
(a) (b)
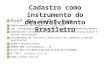
Atualmente, existem câmara digitais com sensores de 12 bits de
resolução radiométrica, capazes de discriminar objetos cobertos pelas
sombras (sensor ADS da Leica Helava). A resolução radiométrica é dada
pelo número de valores digitais representando níveis de cinza, usados para
expressar os dados coletados pelo sensor. Quanto maior o número de
valores, maior é a resolução radiométrica. Por exemplo, uma imagem é
formada por números digitais de 8 bits, o total de níveis de cinza para
representar a imagem será 256. Desta forma, a imagem será identificada
como tendo uma resolução radiométrica de 8 bits, na qual o valor zero é
associado à cor preta e o valor 255 à cor branca. A Figura 2.12 mostra
imagens com diferentes resoluções radiométricas.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
58Figura 2.12. (a) Imagem com resolução radiométrica de 1 bit. (b) Imagem
com resolução radiométrica de 5 bits. (c) Imagem com resolução
radiométrica de 8 bits. (d) Imagem com resolução radiométrica de 11 bits.
(FONTE: MELO, 2002)
(a) (b) (c)
(d)
2.2.1.3 Ângulo de abertura da câmara
O ângulo de abertura da câmara (α) é função da distância focal e do
tamanho do quadro da câmara. No caso das câmaras métricas
convencionais, como o quadro possui dimensão quadrada (23x23 cm), o
ângulo de cobertura é função apenas da distância focal.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
59Figura 2.13. Ângulo de abertura da câmara.
Para o cálculo do ângulo de abertura da câmera (α), deve-se
considerar a diagonal do quadro e a distância focal da câmara, a saber:
)2
arctan(2f
d=α (2.6)
Onde,
• 22 2323 +=d
As câmaras fotogramétricas são classificadas como de ângulo pequeno (10º à 20º) que possuem distância focal entre 610 a 915 mm, cuja
aplicação é mais usual para espionagem, fotointerpretação e geração de
mosaicos. Ângulo normal (50º à 75º) com distância focal variando de 210
à 300 mm, cuja aplicação é mais usual para mapeamento de áreas com
grande movimentação do terreno e geração de mosaicos. A grande angular (85º à 95º) é a câmara mais utilizada para mapeamento, com
distância focal de aproximadamente 153 mm e a super grande angular (110º à 130º) com distância focal de aproximadamente 88 mm, utilizada
para mapeamento de áreas com pequena movimentação do terreno
(terrenos planos).
O ângulo de abertura da câmara estabelece uma relação muito
importante na detecção de oclusões em imagens aéreas, pois quanto maior
o ângulo de abertura maior será a oclusão. Em âmbito nacional, as câmaras

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
60mais utilizadas são: ângulo normal; e grande angular. A Figura 2.14 mostra
uma oclusão formada com uso de uma câmara com distância focal de 153
mm e 300 mm.
Figura 2.14. Ângulo de abertura da câmara. (a) Oclusão formada com uso
de uma câmara com distância focal de 153 mm. (b) Oclusão formada com
uso de uma câmara com distância focal de 300 mm. (c) e (d) triângulos
formados com cobertura fotogramétrica de 60% de sobreposição.
(a) (b)
(c) (d)

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
61Na Figura 2.14 verifica-se que, ambas as fotografias foram obtidas na
mesma altura de vôo, porém, na Figura 2.14a tem-se uma imagem
adquirida com uma câmara grande angular (distância focal de 153 mm) e
na Figura 2.14b uma câmara ângulo normal (distância focal de 300 mm).
Percebe-se visualmente que a oclusão apresentada na Figura 2.14a é
maior que a apresentada na Figura 2.14b, fato explicado devido ao ângulo
de abertura característico de cada uma das câmaras utilizadas para o
recobrimento aéreo.
Uma vantagem em utilizar câmaras grande angular em relação ao
uso de câmara de ângulo normal é o menor custo do projeto,
conseqüência do menor número de fotografias a serem adquiridas para
recobrir o terreno, bem como melhor determinação da coordenada
altimétrica dos pontos, devido principalmente à possibilidade de formação
de um triângulo eqüilátero (Figura 2.14c). Uma desvantagem do uso de
câmaras grande angular é que o tamanho da oclusão projetada é maior que
as obtidas com câmaras ângulo normal (comparar as Figs. 2.14a e 2.14b).
Uma desvantagem do uso da câmara ângulo normal está na
impossibilidade de formar triângulos eqüiláteros para a determinação de
coordenadas altimétricas com melhor precisão.
Outros fatores causadores de oclusões são: a altura da edificação, ou
seja, como pode ser visualizado na figura 2.15a e 2.15b, quanto maior a
altura da edificação maior a área de oclusão na imagem; e a altura de vôo
(Figs. 2.15c, 2.15d).

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
62Figura 2.15. (a) e (b) Oclusões provocadas pela altura da edificação. (c) e
(d) Oclusões provocadas pela altura de vôo.
(a) (b)
(c) (d)
O ângulo de abertura da câmara também define a resolução espacial
da imagem. A seguir será apresentada a definição de resolução espacial de
imagens.
2.2.1.4 Resolução espacial de imagens
A resolução espacial de imagem é função do ângulo de abertura e
distância focal do sensor (câmara) e refere-se à capacidade do sensor
distinguir os objetos contidos na superfície. Para isto, é necessário definir a
área do campo de visada do detector, em determinado instante e altitude de
vôo. O ângulo definido pela projeção geométrica do detector é denominado
de campo de visada instantânea (em inglês, Instantaneous Field of View,

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
63IFOV), ou seja, o IFOV define a porção do terreno que é focalizada pelo
sensor, a uma dada altitude de vôo. A Figura 2.16 ilustra o IFOV.
Figura 2.16. IFOV.
Onde,
• G: porção do terreno focalizada pelo sensor.
Em uma imagem com resolução espacial de 20 m apenas objetos
maiores que 20 m poderão ser distinguidos na imagem e quanto menor o
IFOV melhor será a resolução espacial da imagem. Uma resolução espacial
de 5 m é melhor que uma resolução espacial de 20 m, pois objetos com 5 m
poderão ser distinguidos na imagem e, consequentemente, produtos com
maior nível de detalhes poderão ser gerados. A Figura 2.17 mostra um
veículo detectado por sensores com diferentes resoluções espaciais.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
64Figura 2.17. (a) Imagem com 1,6 m de resolução espacial. (b) Imagem com
0,2 m de resolução espacial. (c) Imagem com 0,1 m de resolução espacial.
(a) (b) (c)
Na Figura 2.17 pode ser verificado que, quanto melhor a resolução
espacial maior o nível de detalhes distinguidos na imagem. Em termos
gerais, as fotografias ou imagens adquiridas por câmaras métricas
convencionais e por câmaras digitais (ADS 40, por exemplo), bem como as
imagens de satélites geradas com informações advindas dos sensores
acoplados nos satélites Ikonos II (1 m) e GeoEyes I e II (0,60 e 0,30 m
respectivamente) são consideradas imagens de alta resolução espacial. As
imagens de satélites geradas com informações oriundas dos sensores
acoplados no satélite SPOT (resolução espacial melhor que 10 m) e outros
de mesmo nível são imagens de média resolução espacial. E, finalmente,
as imagens Landsat (resolução espacial melhor que 30 m) são imagens
caracterizadas como de baixa resolução espacial. A Figura 2.18 mostra as
imagens consideradas de alta, média e baixa resolução espacial.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
65
Figura 2.18. (a) Imagem de alta resolução espacial. (b) Imagem de média
resolução espacial. (c) Imagem de baixa resolução espacial.
(a) (b)
(c)
As principais aplicações para imagens de alta resolução são:
mapeamentos urbanos e rurais (cadastro, redes, planejamento,
telecomunicações, saneamento e transportes); mapeamentos básicos e
aplicações gerais em Sistemas de Informação Geográfica; uso da Terra
(com ênfase em áreas urbanas); estudo de áreas verdes urbanas;
estimativas de colheitas e demarcação de propriedades rurais; laudos
periciais em questões ambientais. As principais aplicações para imagens de
média resolução são: impacto das atividades humanas sobre o meio
ambiente; monitoramento de fenômenos naturais; acompanhamento do uso

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
66agrícola das terras; apoio ao monitoramento de áreas de preservação;
atividades energético-mineradoras; cartografia e atualização de mapas;
desmatamentos; dinâmica de urbanização; estimativas de fitomassa;
monitoramento da cobertura vegetal; secas e inundações; sedimentos em
suspensão nos rios e estuários. E as principais aplicações para imagens de
baixa resolução são: acompanhamento do uso agrícola de terras; apoio ao
monitoramento de áreas de preservação; atividades energético-
mineradoras; cartografia e atualização de mapas; desmatamentos;
detecção de invasões em áreas indígenas; dinâmica de urbanização;
estimativas de fitomassa; monitoramento da cobertura vegetal; queimadas
Secas e inundações; sedimentos em suspensão nos rios e estuários.
Na Figura 2.18 podem ser visualizadas imagens aéreas adquiridas
por sensores acoplados em plataformas aéreas e orbitais. Os tipos de
fotografias ou imagens adquiridas dependem da plataforma, cujo sensor se
encontra acoplado.
2.3. Tipos de imagens ou fotografias As imagens são de três tipos basicamente, a saber:
• Terrestre;
• Aérea; e
• Orbital.
As imagens do primeiro tipo são tomadas com câmara acopladas em
algum tipo de suporte, tal como um tripé, cuja posição (X, Y, Z) e orientação
(ω, ϕ, κ) da câmara são usualmente conhecidos. O Fototeodolito (Fig. 2.19)
é uma combinação de câmara com teodolito montados sobre um tripé, com
a finalidade de obter fotografias terrestres. Esses tipos de fotografias
possuem aplicações na automação industrial, no reconhecimento de
objetos à curta-distância, para restituição arquitetônica, para reconstrução

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
67tridimensional de máquinas, navios, barcos, estruturas de grandes
construções, entre outras.
Figura 2.19. (a) Fototeodolito desenvolvido por Hugershoff. (b) CRC-1. (c)
INCA.
(a) (b)
(c)
O teodolito facilita o alinhamento da câmara por meio de um azimute
conhecido. Os tipos de aplicações mais comuns são: reconstrução
tridimensional de objetos industriais; mapeamento móvel terrestre;
monitoramento de deformações estruturais; etc. A Figura 2.20 apresenta

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
68uma imagem terrestre tomada com uma câmara digital não métrica de
pequeno formato.
FIGURA 2.20. Imagem tomada com câmara digital não métrica de pequeno
formato acoplada em um teodolito.
Outro tipo de câmara terrestre é a chamada câmara balística
(exemplo da qual é mostrado na Figura 2.21). Estas são câmaras grandes
montadas em terreno selecionado, com a finalidade de adquirir fotografias
da órbita de satélites artificiais, de forma que se tenha como apoio de
campo, para a orientação da câmara, as estrelas que compõem a abóbada
celeste.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
69FIGURA 2.21. (a) Câmara Balística. (b) Processo de uso.
(a) (b)
Esse tipo de câmara é muito utilizado para monitoramento das placas
tectônicas, cálculo de trajetória dos satélites, cálculo da dimensão, forma e
gravidade da Terra e determinação do movimento dos oceanos. A Figura
2.21b ilustra um exemplo de processo de uso da câmara Balística para o
cálculo da trajetória de um satélite. Neste caso, a posição das estrelas
fixadas na abobada celeste é determinada com uso de um teodolito para
serem utilizadas como apoio de campo no processo de orientação das
imagens. Várias imagens são adquiridas com a câmara supracitada e, após
o processo de orientação e retificação das imagens, é calculada a trajetória
do satélite observado. Na década de 70 este tipo de câmara foi utilizado
com a finalidade de se estabelecer uma rede de trabalho mundial de pontos
de controle e para determinar com precisão a posição relativa dos
continentes, ilhas oceânicas remotas etc.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
70Já as fotografias aéreas são usualmente classificadas como vertical,
obliqua e convergentes. As fotografias aéreas são consideradas verticais
quando o eixo ótico da câmara coincide com o nadir ou zênite do ponto. A
Figura 2.22 mostra uma situação ideal.
FIGURA 2.22. Situação ideal na tomada de fotografias ou imagens.
Fotografias verticais não são factíveis na prática devido à
instabilidade da aeronave (inclinação da câmara, rajada de vento, entre
outras), impedindo que o eixo da câmara seja coincidente com o nadir, ou
seja, o eixo da câmara não é perfeitamente vertical no momento da tomada
da fotografia, de forma que o plano da fotografia não seja paralelo ao
Datum. Desta forma, quando o eixo da câmara é levemente inclinado da
vertical, as fotografias são denominadas inclinadas. Porém, para fins
práticos, fotografias com inclinações (ω e ϕ) inferiores à 3º são
consideradas verticais. Fotografias com inclinação superior à 3º podem ser
denominadas de:
• Fotografia aérea baixo obliqua; e
• Fotografia aérea alto obliqua.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
71A fotografia obliqua é tomada com o eixo da câmara inclinado com
inclinação angular acima de 3º, onde nos casos em que se encontra o
horizonte são denominadas de alto obliqua (Fig. 2.23a) e em casos que não
se encontra o horizonte, são denominadas baixo obliqua (Fig. 2.23b). A
Figura 2.23 ilustra as orientações do eixo de uma câmara alto obliqua e
baixo obliqua, bem como um perfil de linhas do terreno para cada situação
descrita.
FIGURA 2.23. (a) Baixa obliqua. (b) Alta obliqua.
(a)
(b)
As fotografias aéreas convergentes são obtidas por meio de sistemas
que integram duas ou mais câmaras, cuja configuração proposta baseia-se
na configuração das câmaras de forma convergente, de tal forma que estas

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
72registrem áreas subseqüentes da superfície física. O grupo de pesquisa em
Fotogrametria da UNESP (Universidade Estadual Paulista) implementou um
sistema denominado SAAPI (Sistema Aerotransportado de Aquisição e Pós-
processamento de Imagens digitais) com as características supracitadas. A
Figura 2.24 apresenta o sistema de aquisição do SAAPI.
FIGURA 2.24. Sistema de aquisição do SAAPI. (a) Plataforma de coleta. (b)
Disposição das câmaras digitais. (c) Instalação do sistema na aeronave. (d)
Geometria das câmaras na plataforma de coleta. (e) Imagem retificada a
partir dos dados da plataforma. (FONTE: RUY, 2008).
(a) (b)
(c) (d)

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
73Na Figura 2.24a, a plataforma de coleta é formada por duas câmaras
digitais de grande formato (Fig. 2.24b, 22 Megapixels), sistema de
georreferenciamento direto e unidades físicas de fixação e estabilização
dos equipamentos. Na Figura 2.24c é mostrada a instalação do sistema na
aeronave e na Figura 2.24d a geometria das câmaras na plataforma de
coleta, ou seja, a forma como as imagens serão adquiridas.
É possível considerar também as fotografias chamadas espaciais,
utilizadas para exploração espacial. Estas fotografias são tomadas por
câmara acopladas em aeronaves espaciais e satélites artificiais. O planeta
Marte, por exemplo, tem sido grande alvo de pesquisa e mapeamento dos
órgãos de mapeamento espacial da Europa e dos Estados Unidos da
América. Instrumentos de precisão foram desenvolvidos e fabricados para o
tratamento adequado deste tipo de situação sem perda de precisão nas
medidas efetuadas.
Para a aquisição de imagens ou fotografias é necessário realizar um
planejamento de vôo minucioso, do qual é necessário estudar diversos
fatores, a saber: definir o tipo de aeronave e câmara a ser utilizadas;
equipamentos para execução do processo fotogramétrico; escala da
fotografia; sobreposição longitudinal; sobreposição lateral; movimentação
do terreno; comprimento e largura da área a ser recoberta
fotogrametricamente; realização de cálculos. A seguir será apresentada
apenas uma noção geral do elemento mais importante para o sucesso de
um projeto fotogramétrico, isto é, o planejamento de vôo.
2.4. Planejamento de vôo O sucesso na execução de qualquer projeto fotogramétrico depende
da qualidade do planejamento de vôo elaborado. Por isso, geralmente, o
planejamento de vôo é executado pelo Engenheiro de maior experiência e o

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
74fator de maior importância está relacionado com o tipo de produto que
deverá ser gerado pelo processo fotogramétrico, cuja imposição geralmente
é feita pelo usuário. Neste caso é necessário decidir a escala da fotografia e
a precisão dos produtos que serão derivados. Por exemplo, um usuário de
cartografia exigiu um produto cartográfico (carta topográfica) na escala
1:2000. Desta forma, poderá ser adquirida imagens na escala até 1:8000,
tendo em vista que o fator de redução é de 4 vezes.
Como descrito anteriormente, uma missão fotogramétrica deve ser
cuidadosamente planejada e rigorosamente executada de acordo com o
plano de vôo. O plano de vôo consiste de um mapa de vôo (Figura 2.25) e
as devidas especificações, tais como, altura e altitude de vôo, velocidade da
aeronave, tempo de exposição das fotografias etc.
FIGURA 2.25. Mapa de vôo.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
752.4.1 Sobreposição longitudinal e lateral
A cobertura fotogramétrica de uma área é realizada por meio de
fotografias verticais obtidas ao longo de uma faixa de vôo com uma série de
fotografias com sobreposição longitudinal. Cada fotografia possui uma
sobreposição em relação à sua fotografia sucessiva. A Figura 2.26 mostra a
sobreposição longitudinal.
FIGURA 2.26. (a) Sobreposição longitudinal. (b) Faixa fotogramétrica.
(a)
(b)

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
76Usualmente, o recobrimento longitudinal entre duas fotografias é
entre 60% e 65% (Fig. 2.26a) para fotografias tomadas com câmara
métricas convencionais e de 80% para fotografias tomadas com câmara
digitais de pequeno formato. A razão para tais números deve-se ao fato da
rigidez geométrica em função da distância focal e tamanho do quadro focal
das câmaras. Uma seqüência de fotografias tomadas na direção de vôo
forma uma faixa fotogramétrica (Fig. 2.26b). A sobreposição longitudinal
consiste em permitir uma cobertura do terreno de dois pontos de vista
diferentes, permitindo a produção de estereopares para a observação e
medição estereoscópica, construção de mosaicos (Fig. 2.26b, ilustração à
direita), geração de pontos de apoio por fototriangulação de imagens.
A sobreposição lateral é requerida para prevenir falhas entre faixas
fotogramétricas consecutivas, como resultado de deriva, inclinações,
variação na altura de vôo da aeronave e na variação do terreno. No caso do
recobrimento lateral entre fotografias adjacentes (alocadas em faixas
fotogramétricas consecutivas, ver Fig. 2.27a) deve-se considerar um
recobrimento entre 30% e 40%. Uma vantagem do uso da sobreposição
lateral é eliminar a necessidade de uso das bordas extremas da imagem,
cuja qualidade geométrica é influenciada pela distorção radial da lente e
pela característica da propriedade perspectiva da imagem. A Figura 2.27
mostra a sobreposição lateral entre fotografias.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
77FIGURA 2.27. (a) Sobreposição lateral. (b) Bloco fotogramétrico.
(a)
(b)
Uma seqüência de fotografias tomadas ao longo de várias faixas
fotogramétricas é denominada de bloco de fotos (Fig. 2.27b).
2.4.2 Escala vertical de uma fotografia
A escala é a razão de uma distância medida em um mapa e sua
medida correspondente no terreno. A escala de um mapa é geralmente

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
78expressa como uma fração, com numerador e denominador na mesma
unidade. Isto mostra que uma escala não possui unidade e quanto maior o
denominador menor é a escala.
A Figura 2.28 ilustra uma seção transversal tomada por meio de uma
fotografia aérea vertical com a estação de exposição posicionada no CP . A
distância entre o Datum e a estação de exposição é denominada altitude de
vôo ( Vh ) e a distância entre a superfície física (S.F.) e a estação de
exposição é denominada altura de vôo ( VH ).
FIGURA 2.28. Escala de uma fotografia vertical.
O terreno apresenta-se plano, porém possui uma altitude média da
região em relação ao Datum, representado por h . O ponto o é o ponto
principal da fotografia (pp). A distância entre o CP e o plano da fotografia
CPo é denominada distância focal da câmara ( f ). A escala da fotografia

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
79
( fE ) é expressa pela razão das distâncias ABab
. Mas, pela semelhança de
triângulos ∆CPab ∆CPAB tem-se que:
hH
fEA
f −= (2.7)
A escala do produto final geralmente é especificada pelo contratante
(usuário) do projeto e o fotogrametrista deverá se encarregar em definir
uma escala da fotografia, cujo mapa ou carta topográfica possibilite a
identificação da menor feição cartográfica de interesse. Por isso, este fator
é variante de acordo com as especificações do projeto e depende da
experiência do engenheiro responsável pela execução do mesmo. Outro
fator de importância a ser considerado é o tipo de equipamento a ser
utilizado para a execução do projeto, que influencia consideravelmente na
determinação da escala da fotografia.
2.4.3 Escolha dos equipamentos
É de extrema importância a escolha dos equipamentos adequados
para realizar o recobrimento aéreo, bem como executar o produto final. Para
um recobrimento aéreo é necessário sugerir uma aeronave que tenha
velocidade de cruzeiro, capacidade de peso e estabilidade adequada.
Dependendo do trabalho a ser realizado, até mesmo um ultra-leve (Figura
2.29b) ou um aeromodelo (Figura 2.29c) podem ser propostas.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
80FIGURA 2.29. (a) Cessna 210 bimotor. (b) Ultra-leve. (c) Aeromodelo.
(a) (b) (c)
No entanto, o que definirá o tipo de aeronave a ser utilizada é a
câmara a ser empregada para a aquisição das imagens. A câmara pode ser
métrica convencional (Fig. 2.30a), câmara digital de pequeno (até 6
MegaPixels, Fig. 2.30b), médio (em torno de 15 MegaPixels, Fig. 2.30c) ou
grande formato (superior à 40 MegaPixels, Fig. 2.30d).
FIGURA 2.30. (a) Câmara métrica convencional. Câmaras digitais: (b) Sony
CyberShot. (c) Canon S5 Pro. (d) Intergraph DMC e Leica ADS40.
(a) (b) (c) (d)
Quando uma câmara métrica convencional ou câmaras digitais de
grande formato são selecionadas para a execução do planejamento de vôo
não restam dúvidas que a melhor aeronave é a ilustrada na Figura 2.29a. Os
equipamentos a serem escolhidos para a execução dos processos
fotogramétricos e compilação do produto final são mostrados na Figura 1.20
(ver capítulo I).
Definido os parâmetros mais críticos para o planejamento de vôo é
necessário estudar a região de recobrimento, calcular a fotobase e aerobase,

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
81distância entre as faixas, número de faixas por fotografias, número de faixas
fotogramétricas e número total de fotografias para o recobrimento aéreo.
2.4.3 Região de recobrimento
A variação de escala da fotografia ou entre fotografias é causada pela
variação da movimentação do terreno, pela variação da altura de vôo, ou
ambas as variações. Como exemplo, considere duas fotografias adquiridas
sobre um terreno com elevação média de 120 m em relação ao Datum com
altitudes variando entre 50 e 180 m. Dada a distância focal da câmara de 152
mm e uma altitude de vôo de 500 m, qual seria a escala média da fotografia?
Solução:
Para uma altitude média de 50 m, tem-se:
m
mE f )50500(152.0−
= ∴ A escala da fotografia é 1:2960.
Para uma altitude média de 180 m, tem-se:
m
mE f )180500(152.0−
= ∴ A escala da fotografia é 1:2105.
Sendo assim, a escala média da fotografia é 1:2500.
A variação de escala da fotografia ou entre fotografias é causada pela
variação da movimentação do terreno, pela variação da altura de vôo ou
ambas as variações. No caso de variação de escala causada por
movimentação do terreno a Figura 2.31 mostra uma situação onde a
aeronave sobrevoa uma região com altura de vôo constante e o terreno varia
da esquerda para a direita, dois efeitos são visíveis: a sobreposição

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
82longitudinal diminui conforme a movimentação do terreno aumenta (Fig.
2.31a); e ocorre redução da área de recobrimento conforme a altitude do
terreno aumenta (Fig. 2.31b).
FIGURA 2.31. Variação de escala devido à movimentação do terreno. (a)
redução da sobreposição longitudinal. (b) redução da área de recobrimento.
(a)
(b)
A solução para os problemas apresentados é variar a altura de vôo da
aeronave ou a distância focal da câmara. Porém, estes fatores devem ser
considerados no momento da elaboração do planejamento de vôo, por isso, é
de extrema importância o estudo da área de recobrimento. Outro fator

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
83importante que deve ser considerado é a precisão dos produtos que deverão
ser obtidos com o processo fotogramétrico, como por exemplo, as curvas de
nível, a ortofotocarta etc.
No momento da tomada das fotografias os componentes de rotação da
câmara nas direções em x (denominado de ω -“movimento de asa da
aeronave”-, Fig. 2.32a) e y (denominado de ϕ -“movimento de nariz da
aeronave”-, Fig. 2.32b) provocam inclinações na aeronave e por isso devem
ser considerados no planejamento de vôo. Quando a aeronave sofre o
movimento em ϕ a sobreposição longitudinal será afetada e quando ocorre o
movimento em ω a sobreposição lateral sofrerá distorções.
FIGURA 2.32. (a) Movimento em ω. (b) Movimento em ϕ.
(a) (b)
O movimento de deriva da aeronave (Fig. 2.33) é provocado pelas
fortes rajadas de vento e da impossibilidade do piloto de vôo manter a
aeronave em linha reta, que provoca falhas no recobrimento fotogramétrico.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
84FIGURA 2.33. Deriva (movimento em κ).
A deriva é o ângulo formado entre a direção de vôo e o alinhamento da
aeronave no momento de deriva. A seguir serão apresentadas as
formulações para os devidos cálculos da elaboração do plano de vôo.
2.4.4 Cálculo da altura de vôo
Ao fixar a sobreposição longitudinal e lateral pode-se calcular a altura
de vôo que será estabelecida para a tomada das fotografias. Para isto é
necessário considerar a precisão dos equipamentos que serão utilizados para
a compilação do produto final. Geralmente, quanto maior a precisão requerida
menor a altura de vôo, entretanto, maior será a quantidade de fotografias a
serem adquiridas para o recobrimento completo do terreno. Portanto, desde
que a acurácia vertical no produto é o fator limitante no processo
fotogramétrico, a altura de vôo é função do intervalo entre as curvas de nível
que devem ser geradas. A relação é expressa por um fator de precisão
denominado Fator C do equipamento fotogramétrico, a saber:

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
85
VHFatorC V= (2.8)
Onde,
• V : intervalo entre as curvas de nível.
2.4.5 Cálculo da Aerobase ( B ) e fotobase (b )
A Aerobase e a fotobase são fatores a serem determinados para o
cálculo da distância entre cada estação de exposição da câmara. A Aerobase
é a distância entre cada estação de exposição medida no terreno (Fig. 2.34b)
e a fotobase é a distância entre dois centros fiduciais, medida na fotografia
(Fig. 2.34a).
FIGURA 2.34. (a) Fotobase. (b) Aerobase.
(a) (b)
Para calcular ambos os fatores faz-se:

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
86 TFxSLb *)1( −= (2.9)
Onde,
SL : é a sobreposição longitudinal fixada para a elaboração do
planejamento de vôo; e
TFx : é a dimensão da fotografia no eixo x.
VH
fBb= (2.10)
bf
HB V=∴ (2.11)
Determinada a aerobase se pode calcular o intervalo de exposição
entre cada fotografia, como segue:
vBei =_ 1 (2.12)
Onde,
ei _ : é o intervalo de exposição entre cada fotografia; e
v : velocidade de cruzeiro da aeronave.
2.4.6 Cálculo da distância entre faixas (W )
Para o recobrimento completo de uma área a ser mapeada é
necessário estabelecer faixas fotogramétricas. O cálculo da distância entre as

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
87faixas é necessário para posicionar a aeronave na execução do planejamento
de vôo com a devida sobreposição lateral fixada no plano de vôo. A Figura
2.35 mostra um esquema da distância entre as faixas fotogramétricas.
FIGURA 2.35. Distância entre faixas fotogramétricas.
Para calcular a distância entre as faixas deve-se realizar os seguintes
cálculos, a saber:
TFySaw *)1( −= (2.13)
Onde,
Sa : é a sobreposição lateral fixada para a elaboração do planejamento de
vôo;
w : medida entre dois centro fiduciais em fotografias pertencentes à faixas
fotogramétricas adjacentes;
TFy : é a dimensão da fotografia no eixo y;

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
88
VH
fWw= (2.14)
wf
HW V=∴ (2.15)
2.4.7 Número de faixas fotogramétricas ( Nf ) e do número total de
fotografias (Tf )
Para calcular o número de faixas fotogramétricas necessária para
recobrir completamente o terreno basta considerar o a largura do terreno a
ser mapeado ( Lr ) e a distância entre as faixas fotogramétricas, calculada
anteriormente.
WLrNf = (2.16)
Para calcular o número total de fotografias necessária para recobrir
completamente o terreno, basta considerar os seguintes elementos, a saber:
B
CrN = (2.17)
Onde,
N : é o número de fotografias por faixa fotogramétrica;
Cr : comprimento do terreno a ser mapeado;

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
89 NfNTf *= (2.18)
Desta forma, se tem os fatores mais importantes para elaborar um
plano de vôo adequado para o recobrimento aéreo. Após os devidos cálculos
um fator importante a ser considerado é o planejamento do apoio de campo a
ser realizado para os processos de orientação fotogramétrica.
Uma variedade de produtos é compilada no projeto fotogramétrico,
tais como, fotografias ou imagens digitais, foto índice, mosaicos, ortofotos,
ortofotocartas, mapas e cartas topográficas digitais ou vetoriais, base de
dados para SIG, MDT, MDS, mapas cadastrais etc. Além do planejamento
de vôo deve ser planejado também o apoio de campo (levantamento
geodésico de pontos de apoio para processos fotogramétricos), estimativa
de custo e tempo de execução do projeto.
2.4.8 Planejamento do apoio de campo
O planejamento do apoio de campo consiste em determinar pontos
tridimensionais sobre a superfície física por meio de métodos de
levantamento direto. Existem dois tipos de pontos de apoio, isto é: pontos
naturais; e pontos artificiais. Os pontos naturais são aqueles pontos foto-
identificáveis cuja identificação está em cruzamentos de vias, cantos de
culturas e de edificações etc (círculo branco, Figura 2.36a). Os pontos de
apoio artificiais são figuras geométricas implantadas na superfície física
(Figura 2.36b), de forma que os mesmos sejam foto-identificáveis. Esses
pontos são implantados, geralmente, com diâmetros de 3 à 5 vezes o
tamanho de um pixel no terreno.

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
90FIGURA 2.36. Apoio de campo. (a) Pontos naturais. (b) Pontos artificiais.
(a)
(b)
A partir do apoio de campo se define o sistema referencial no espaço-
objeto a ser adotado no projeto fotogramétrico, assim como é fornecido
subsídios para os processos de orientação fotogramétrica. Dependendo das
especificações de precisão do projeto fotogramétrico, o sistema de varredura

Capítulo II
Elementos de Fotogrametria e Sensoriamento Remoto / Curso de Engenharia Cartográfica – UFPR Prof. Daniel Santos
91LASER tem servido como tecnologia de levantamento de apoio
fotogramétrico, devido a sua capacidade de fornecer pontos tridimensionais,
cuja precisão planimétrica é em torno de 50 cm e altimétrica em torno de 15
cm. O sistema de varredura LASER é uma tecnologia emergente no mercado
nacional usada como um sistema de aquisição de informações, tais como,
imagem de intensidade, coordenadas tridimensionais, resposta espectral dos
objetos contidos na superfície de varredura, bem a atitude e posição da
plataforma.
A seguir serão apresentados os sistemas de aquisição de informações
mais utilizados em projetos fotogramétricos.
Recommended