CAPÍTULO 4
Diseño de Detalle
En general, el diseño de detalle está relacionado con el diseño de subsistemas y componentes que integran el conjunto, independientemente de la naturaleza del producto. Todos estos componentes estarán en mayor o menor grado definidos en la fase de diseño conceptual, pero pueden variar considerablemente en la de detalle debido a distintas alternativas de fabricación, conocimientos sobre materiales, nuevas tecnologías, formas, etc.
Un diseño de detalle sólido es tan importante para el éxito del diseño global como lo era una buena solución conceptual, aunque es evidente que un diseño brillante no puede salvar una solución conceptual errónea, por mucha tecnología que se le añada a ésta.
Algunos aspectos generales a destacar en el diseño de detalle son:
• Nunca se debe llevar a cabo sin referirse al diseño conceptual obtenido
en la fase previa.
• La interacción entre los diferentes subsistemas o componentes que intervienen en el diseño debe considerarse junto con las restricciones que cada uno de ellos impone. Hay que considerar cuales de ellos son más importantes en el diseño global.
Capítulo 4: Diseño de Detalle 55
• El propio acto de definir un componente dentro de un sistema impone restricciones en el mismo.
• Generalmente, la reducción en la variedad de componentes conduce a
una reducción de tiempos y a un menor coste del producto.
• Es conveniente diseñar pensando como se va a fabricar o instalar.
En el caso del mecanismo Ball & Beam que estamos estudiando, éste no se limita a estar formado únicamente por el conjunto formado por bola y viga, sino que se hace necesaria la participación de una serie de elementos y factores indispensables para el correcto funcionamiento del sistema, incluido su controlabilidad. De esta forma, podemos dividir el diseño de detalle de este mecanismo en tres partes:
1. Motor: debido a los resultados obtenidos en la simulación llevada a cabo en el anterior capítulo, se hace necesario un estudio sobre la posibilidad o no de implantar un reductor para aumentar el par. Se analizan las ventajas e inconvenientes.
2. Resto de elementos e integración: define la interacción existente entre
todos los elementos, caracterizando los que no se hayan visto.
3. Pruebas con el sensor de ultrasonidos: debido a la importancia de este componente en el desarrollo y funcionalidad del sistema, se hace un estudio detallado del mismo.
Capítulo 4: Diseño de Detalle 56
A.
Motor
Capítulo 4: Diseño de Detalle 57
1. Características Motor Usado Como ya se ha especificado en el anterior capítulo, para hacer girar la viga indistintamente en un sentido u otro se dispone de un motor de corriente continua. Este mecanismo de transmisión se caracteriza por ser extremadamente versátil, capaz de operar en ambas direcciones en un amplio rango de velocidades y con un control preciso de éstas en todos los casos. Además posee una elevada relación par-inercia que le da una rápida respuesta ante señales de actuación. En el caso de ser un servomotor, éste se caracteriza por una armadura de bajo peso, inercia e inductancia, lo que le hace responder de forma rápida a cambios en la posición o velocidad. En el caso concreto de nuestro sistema, el motor usado es el modelo GR 63x55 de Dunkermotoren, el cual se caracteriza principalmente por tener imanes permanentes en lugar de devanados para proporcionar el campo magnético que origina las fuerzas que hace mover el rotor. La presencia de estos imanes introduce las siguientes ventajas:
• Motor más simple y fiable
• Menor disipación de calor, lo que posibilita encerrar completamente el motor
• Curva par-velocidad más lineal
• Elevada eficiencia
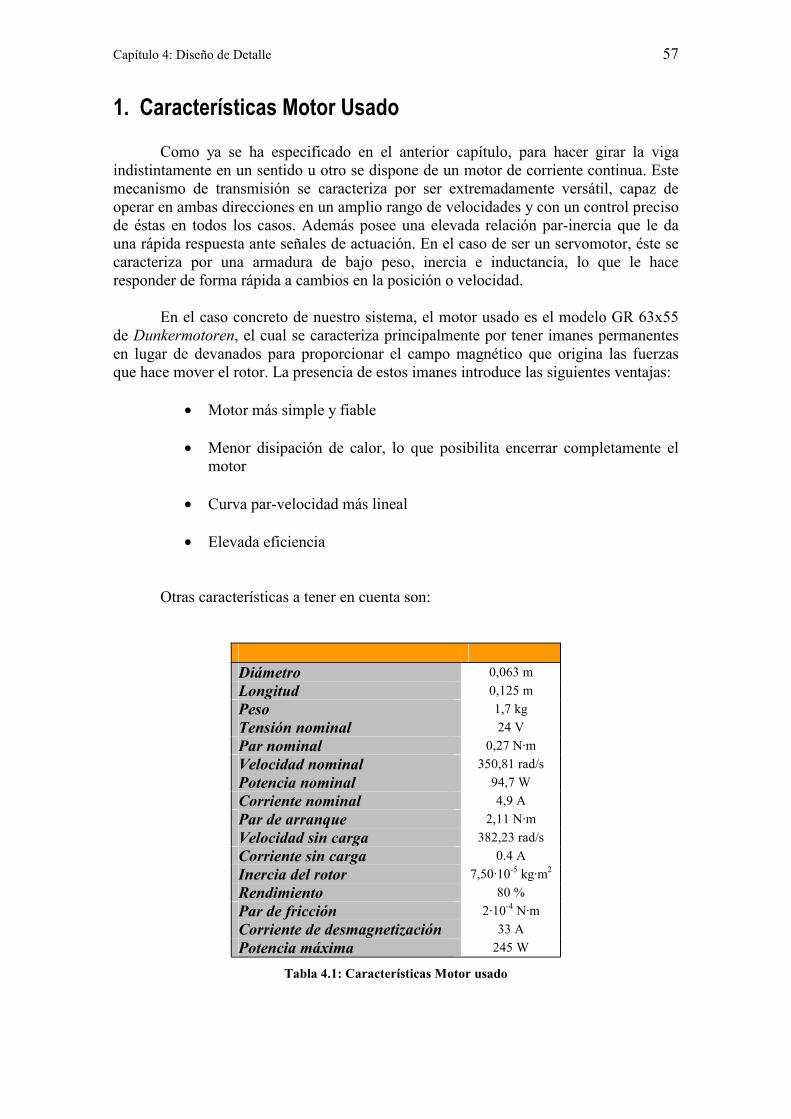
Otras características a tener en cuenta son:
Diámetro 0,063 m Longitud 0,125 m Peso 1,7 kg Tensión nominal 24 V Par nominal 0,27 N·m Velocidad nominal 350,81 rad/s Potencia nominal 94,7 W Corriente nominal 4,9 A Par de arranque 2,11 N·m Velocidad sin carga 382,23 rad/s Corriente sin carga 0.4 A Inercia del rotor 7,50·10-5 kg·m2 Rendimiento 80 % Par de fricción 2·10-4 N·m Corriente de desmagnetización 33 A Potencia máxima 245 W
Tabla 4.1: Características Motor usado
Capítulo 4: Diseño de Detalle 58
El aspecto del motor empleado y sus curvas características se representan en las Figuras 4.1 y 4.2 respectivamente.
Figura 4.1: Aspecto Motor Usado
Figura 4.2: Curvas Características
Este tipo de motor puede ser combinado con diferentes engranajes y encoders, y por su tamaño y gran potencia, su uso se hace especialmente conveniente en aplicaciones industriales tales como:
• Ingeniería de precisión
• Ingeniería de medición y control
• Servomecanismos
• Bombas y compresores
• Construcción de máquinas en general
• Operadores de puertas
• Equipamiento médico

Capítulo 4: Diseño de Detalle 59
2. Modelo Matemático del Motor Para poder simular posteriormente el comportamiento del sistema con un motor provisto de reductor es necesario obtener previamente el modelo matemático de dicho motor, para insertarlo en las ecuaciones ya vistas de Lagrange. Este modelo será prácticamente igual al dado por un motor simple de corriente continua, aunque el uso de engranajes introducirá ciertas variantes físicas y técnicas. Por tanto, empezaremos estudiando el modelo de un motor sin caja de engranajes, para pasar posteriormente al modelo con reductor y ver las diferencias entre un caso y otro. 2.1. Modelo sin reductor
Según sea el tipo de conexión en los devanados del motor, se obtienen diferentes modelos del sistema eléctrico. El más común es el que se puede ver en la Figura 4.3, en el que la resistencia y la bobina se encuentran en serie.
Figura 4.3: Modelo Eléctrico-Mecánico del Motor sin Reductor
Al no haber reductor, se cumple que el par y la velocidad a la salida del motor es el mismo que en la carga (viga):
mc ττ =
mc ωω = → ••
=θ2q
Despreciándose la inductancia de la armadura por presentar valores pequeños, este modelo puede ser controlado por la siguiente ecuación dinámica:
membmin KRieRiV ω⋅+⋅=+⋅= (1) → m
ein
RKVi
•⋅−= θ
En esta ecuación, Vin (V) representa el voltaje de entrada al motor, Rm (Ω) e i (A) son la resistencia y la corriente de la armadura respectivamente, eb (V) es la fuerza

Capítulo 4: Diseño de Detalle 60
electromotriz, Ke (V·s/rad) la constante de tensión del motor y ωm (rad) es la velocidad angular de salida del motor.
Por otro lado, se cumple que el par que produce el eje del motor va a ser
proporcional a la corriente de entrada a través de la constante de par del motor (Km):
iKmm ⋅=τ (2) Sustituyendo i por la expresión obtenida de la ecuación (1), y teniendo en cuenta la igualdad de velocidades angulares en la salida del motor y en la carga, obtenemos una expresión que relaciona el par con la tensión de entrada y con la variable q2 (ángulo girado por la viga):
⋅−=
•
2qKVRK
einm
mmτ
Para poder introducir el comportamiento del motor en el modelo dinámico del sistema global, es necesario expresar esta última ecuación en términos del par aplicado en la carga. De esta forma, dado que los pares son iguales, y llamando U a la señal de actuación sobre el motor que será su tensión de entrada, se obtiene finalmente:
⋅−=
•
2qKURK
em
mcτ
Como se puede observar, es necesario conocer los valores de los parámetros Km, Ke y Rm. La primera constante se averigua de aplicar condiciones nominales en la ecuación (2):
AmN
iK
n
nm 9,4
27,0 ⋅== τ → AmNKm ⋅= 055,0
Si se desprecia la resistencia del rotor, y se considera régimen permanente, se da que las constantes Ke y Km son iguales. Esto se demuestra mediante el siguiente balance de potencias:
( ) iKierotoralinyectadaPotencia meb ⋅⋅=⋅= ω
( ) mmmm iKejeelendadesarrollaPotencia ωωτ ⋅⋅=⋅= Como en régimen permanente ambas potencias son iguales, se demuestra por tanto que Ke = Km en magnitud.
radsVKe ⋅= 055,0
Capítulo 4: Diseño de Detalle 61
Por último, Rm se puede obtener de la ecuación (1) aplicando condiciones nominales:
AsradradsVV
iKV
Rn
neninm 9,4
81,350055,024, ⋅⋅−=⋅−
=ω
→ Ω= 96,0mR
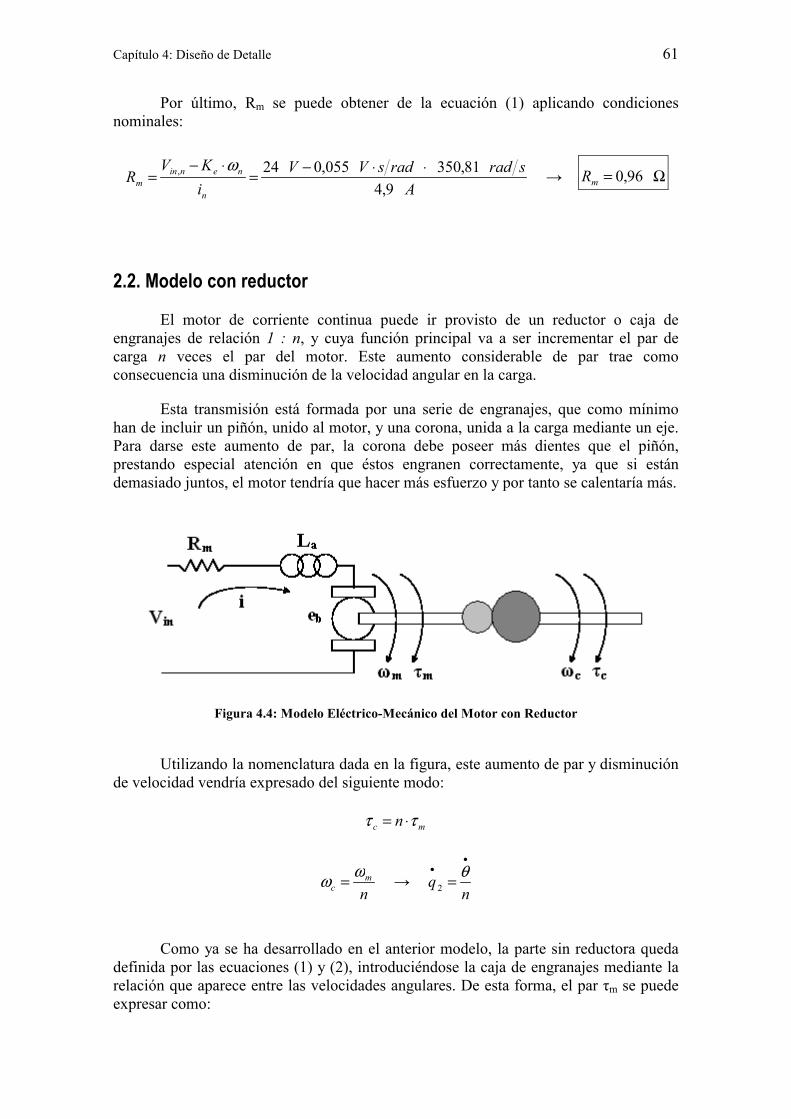
2.2. Modelo con reductor
El motor de corriente continua puede ir provisto de un reductor o caja de
engranajes de relación 1 : n, y cuya función principal va a ser incrementar el par de carga n veces el par del motor. Este aumento considerable de par trae como consecuencia una disminución de la velocidad angular en la carga.
Esta transmisión está formada por una serie de engranajes, que como mínimo han de incluir un piñón, unido al motor, y una corona, unida a la carga mediante un eje. Para darse este aumento de par, la corona debe poseer más dientes que el piñón, prestando especial atención en que éstos engranen correctamente, ya que si están demasiado juntos, el motor tendría que hacer más esfuerzo y por tanto se calentaría más.
Figura 4.4: Modelo Eléctrico-Mecánico del Motor con Reductor
Utilizando la nomenclatura dada en la figura, este aumento de par y disminución de velocidad vendría expresado del siguiente modo:
mc n ττ ⋅=
nm
cωω = →
nq
••
= θ2
Como ya se ha desarrollado en el anterior modelo, la parte sin reductora queda definida por las ecuaciones (1) y (2), introduciéndose la caja de engranajes mediante la relación que aparece entre las velocidades angulares. De esta forma, el par τm se puede expresar como:

Capítulo 4: Diseño de Detalle 62
⋅⋅−=
•
2qnKVRK
einm
mmτ
Verdaderamente nos interesa la relación τc-U:
⋅⋅−⋅=
•
2qnKURKn e
m
mcτ
2.3. Diferencias Para ver las discrepancias entre un modelo y otro averiguamos la función de transferencia que relaciona el ángulo girado por la viga (q2) con la tensión de entrada al motor (U). Para ello necesitamos un modelo dinámico que incluya el par de la carga y que nos permita desarrollar dicha función. El modelo más simple que podemos usar resulta de aplicar la 2ª ley de Newton: todo el par aplicado en la carga se consigue del movimiento de inercia del eje.
cqm τ=⋅••
2
cqsm τ=⋅⋅ 22
Para cada uno de los modelos propuestos, se sustituye el valor de τc. a) Sin reductor
[ ]222 qsKU
RKqsm e
m
m ⋅⋅−=⋅⋅
( ) UKqsKKsRm memm ⋅=⋅⋅+⋅⋅ 2
2
sKKsRmK
Uq
emm
m
⋅⋅+⋅⋅= 2
2
b) Con reductor
[ ]222 qsnKU
RKnqsm e
m
m ⋅⋅⋅−⋅=⋅⋅

Capítulo 4: Diseño de Detalle 63
( ) UKnqsKKnsRm memm ⋅⋅=⋅⋅⋅+⋅⋅ 222
sKKnsRmKn
Uq
emm
m
⋅⋅⋅+⋅⋅⋅= 22
2
Como se puede observar, existen dos diferencias bastante significativas:
1. La ganancia estática se incrementa n veces.
2. La fricción equivalente se multiplica por n2, lo que hace que el motor se frene más.
Este término de fricción equivalente se obtiene al considerar que el par que
proporciona el motor se utiliza en vencer la inercia y la fricción de la carga:
•••⋅+⋅= θθτ BJ
siendo J la inercia y B la fricción. Si obtenemos la función de transferencia, vemos que el término con s corresponde a la fricción:
θθτ ⋅⋅+⋅⋅= sBsJ 2
sBsJ ⋅+⋅= 2
1τθ
3. Simulación Tal y como pudimos ver en los resultados obtenidos en el Capítulo 3, es posible controlar el movimiento de la bola por el interior de la viga hasta conseguir que se posicione en el centro. El gran inconveniente que aparece es que se necesita para ello un elevado par que nuestro motor no es capaz de proporcionar por sí solo. Surge por tanto la posibilidad de introducir una caja de engranajes que aumente de forma considerable dicho par. Para ver la relación de engranajes necesaria y la potencia requerida en cada momento, llevamos a cabo una simulación muy similar a la ya realizada anteriormente, con la única salvedad de que ahora se introduce en las ecuaciones del modelo la obtenida para el motor con reductora. La potencia que se obtenga deberá ser menor que la máxima permitida que es de 245 W. Se ha utilizado en este caso como referente la potencia y no el par de arranque y el nominal ya que puede ocurrir que se esté dentro del rango permitido en cuanto a par, pero la potencia consumida debido a la velocidad sea superior a la máxima. La potencia se ha calculado como el producto de la tensión por la intensidad.
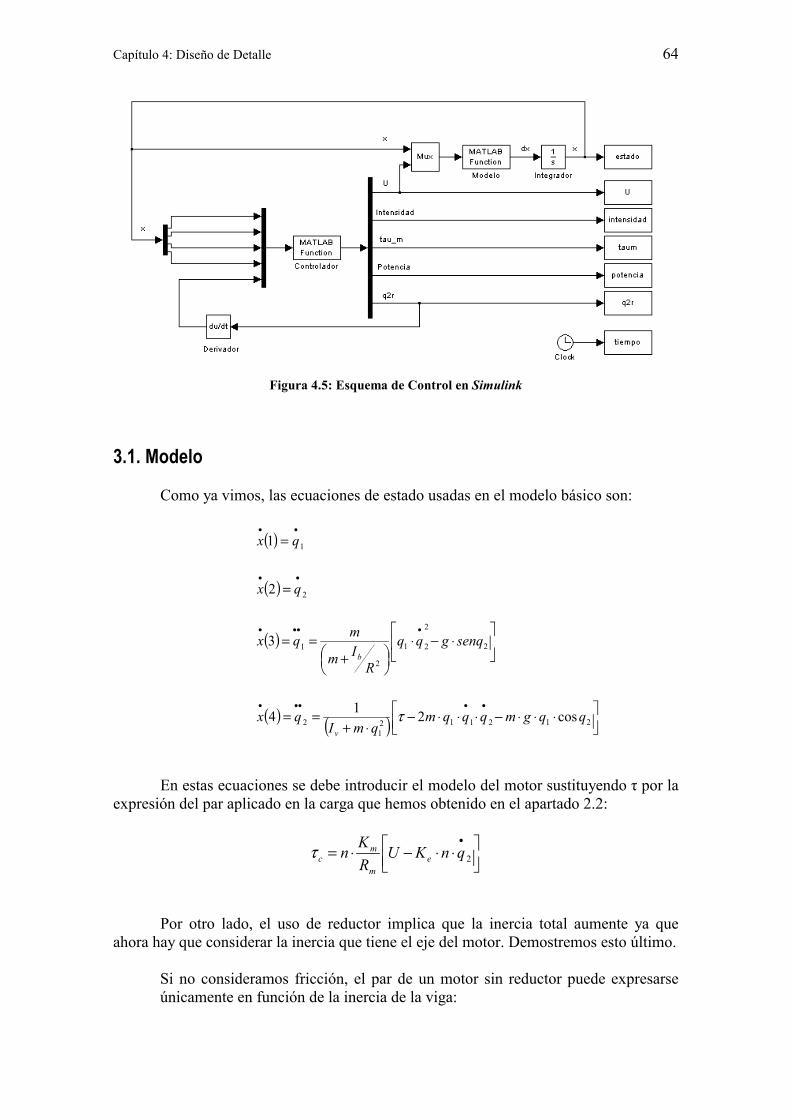
De esta forma, usando el diagrama de bloques en Simulink representado en la Figura 4.5, se pretende ver gráficamente los valores de q1 y q2, el voltaje aplicado al motor y la potencia requerida en cada instante.
Capítulo 4: Diseño de Detalle 64
Figura 4.5: Esquema de Control en Simulink
3.1. Modelo
Como ya vimos, las ecuaciones de estado usadas en el modelo básico son:
( ) 11••
= qx
( ) 22••
= qx
( )
⋅−⋅
+
==••••
2
2
21
2
13 senqgqq
RIm
mqxb
( ) ( )
⋅⋅⋅−⋅⋅⋅−
⋅+==
•••••
2121121
2 cos214 qqgmqqqmqmI
qxv
τ
En estas ecuaciones se debe introducir el modelo del motor sustituyendo τ por la expresión del par aplicado en la carga que hemos obtenido en el apartado 2.2:
⋅⋅−⋅=
•
2qnKURKn e
m
mcτ
Por otro lado, el uso de reductor implica que la inercia total aumente ya que ahora hay que considerar la inercia que tiene el eje del motor. Demostremos esto último.
Si no consideramos fricción, el par de un motor sin reductor puede expresarse únicamente en función de la inercia de la viga:

Capítulo 4: Diseño de Detalle 65
mvmvmm JJJJ••••••
⋅=+=⋅= θθθτ )( ya que Jv>>Jm
Si el motor lleva reductor, los términos asociados a la inercia de la viga y a la inercia del motor son del mismo orden de magnitud:
mv
mm
vmmcvmm nJJ
nJJJJ
••••
••••••
+=⋅+⋅=⋅+⋅= θθθθθτ
Por tanto, la inercia Iv que aparece en la cuarta ecuación de arriba debe sustituirse por la siguiente expresión que dependerá de la longitud de viga elegida y de la relación de engranajes que usemos:
nImkg
nIII vv
m +⋅⋅=+= − 251050,7
Teniendo en cuenta todas estas consideraciones, las ecuaciones de estado que usaremos finalmente en el modelo para simular son: ( ) 11
••= qx
( ) 22
••= qx
( )
⋅−⋅
+
==••••
2
2
21
2
13 senqgqq
RIm
mqxb
( )
⋅⋅⋅−
⋅+⋅⋅−
⋅
⋅++
==•••••
2122
1121
2 cos214 qqgmqR
KKnqqmU
RK
nqm
nII
qxm
em
m
m
vm
Además de los parámetros ya usados (m, Ib e Iv), se introduce uno nuevo: la relación de engranajes n, que variará en función del par que necesitemos o que venga limitado. 3.2. Controlador Este bloque tiene como objetivos averiguar los valores de salida del ángulo de la viga requerido en todo momento (q2r) y de la tensión que hay que aplicar al motor para tal actuación (U). Utilizando además este último valor se obtiene el par a la salida del motor y la intensidad que recorre la armadura, obteniéndose así la potencia requerida. El primer valor se calcula del mismo modo que ya vimos en la anterior simulación:

Capítulo 4: Diseño de Detalle 66
( )
−⋅+−⋅−=
•
111121 qKqKg
q dpr
Para obtener U partimos también de la ecuación que teníamos para averiguar el par en el controlador. Lo único que varia es que ahora debemos sustituir τ por la expresión obtenida para el motor en función de U y n.
( ) 21121222222 2cos••••
⋅⋅⋅+⋅⋅+
−+−= qqqmqqmgqqKqqK rdrpτ
( ) 211212222222 2cos•••••
⋅⋅⋅+⋅⋅+
−+−=
⋅⋅−⋅ qqqmqqmgqqKqqKqnKU
RKn rdrpe
m
m
( ) 221121222222 2cos•••••
⋅⋅+
⋅⋅⋅+⋅⋅+
−+−
⋅= qnKqqqmqqmgqqKqqK
KnRU erdrp
m
m
Por último, el par motor, la intensidad y la potencia absorbida se calculan del modo siguiente:
⋅⋅−=
•
2qnKURK
em
mmτ
m
e
RqnKUi 2
•⋅⋅−=
iUP ⋅=
3.3. Resultados Para esta simulación no se va a emplear el software de interfaz creado en Matlab y que se ha usado en el anterior capítulo, sino que se va a realizar ejecutando un pequeño código de rutina en el que ya se incluyen los diferentes parámetros y condiciones iniciales. De está forma, entrando en dicho código, se podrán modificar manualmente cada uno de los valores para las distintas pruebas a realizar. Tal y como quedó definido en la simulación anterior, la bola que se va a usar es la de acero. Partiendo de esta premisa, sólo nos queda por averiguar que longitud de viga es la más favorable a los requerimientos de par necesarios para hacerla girar. Se trata por tanto de simular y analizar los casos 3 y 4 propuestos en el diseño conceptual. Las condiciones iniciales van a ser las ya vistas:
Capítulo 4: Diseño de Detalle 67
q1 q2 dq1 dq2 C.I.(1) 0,5 1,0472 0 0
q1 q2 dq1 dq2 C.I.(4)
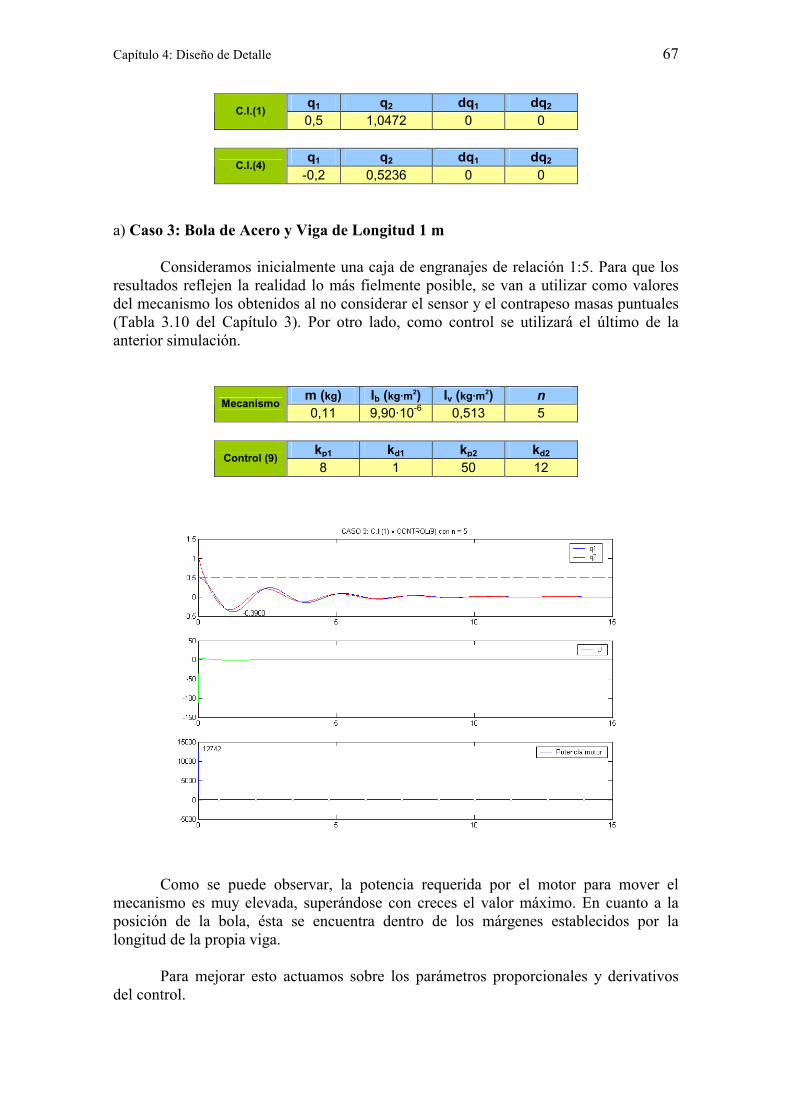
-0,2 0,5236 0 0 a) Caso 3: Bola de Acero y Viga de Longitud 1 m Consideramos inicialmente una caja de engranajes de relación 1:5. Para que los resultados reflejen la realidad lo más fielmente posible, se van a utilizar como valores del mecanismo los obtenidos al no considerar el sensor y el contrapeso masas puntuales (Tabla 3.10 del Capítulo 3). Por otro lado, como control se utilizará el último de la anterior simulación.
m (kg) Ib (kg·m2) Iv (kg·m2) n Mecanismo 0,11 9,90·10-6 0,513 5
kp1 kd1 kp2 kd2 Control (9) 8 1 50 12
Como se puede observar, la potencia requerida por el motor para mover el mecanismo es muy elevada, superándose con creces el valor máximo. En cuanto a la posición de la bola, ésta se encuentra dentro de los márgenes establecidos por la longitud de la propia viga. Para mejorar esto actuamos sobre los parámetros proporcionales y derivativos del control.
Capítulo 4: Diseño de Detalle 68
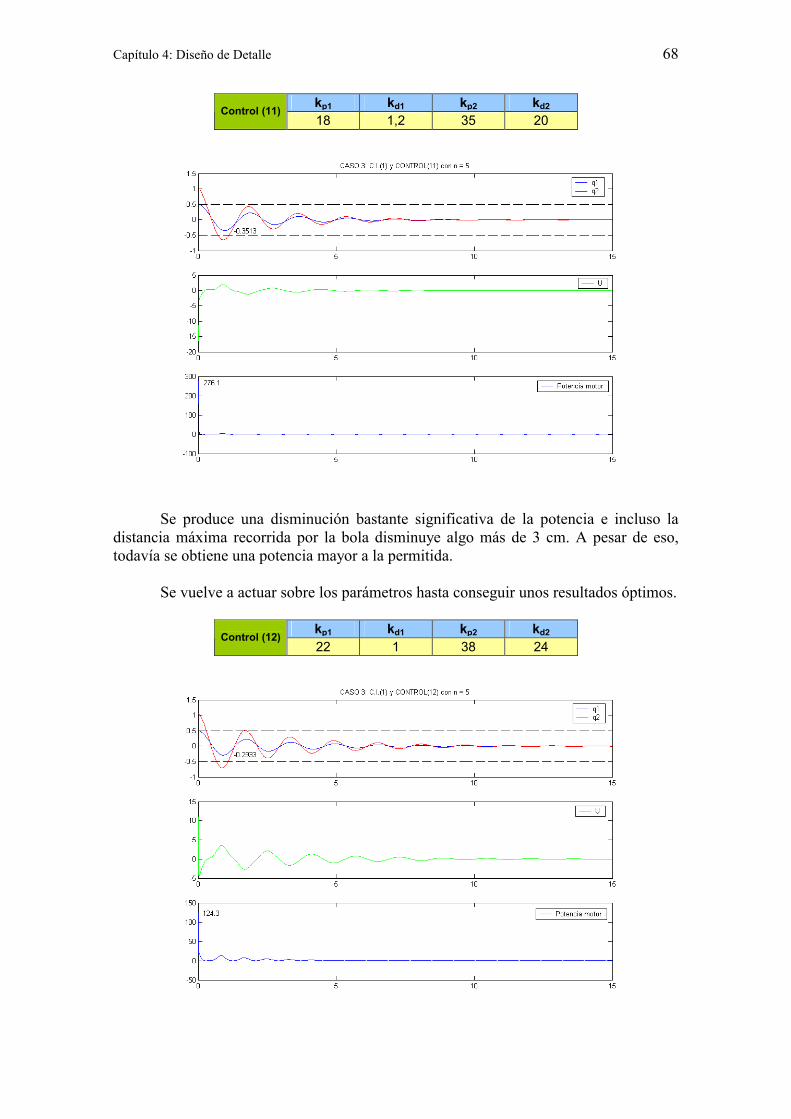
kp1 kd1 kp2 kd2 Control (11) 18 1,2 35 20
Se produce una disminución bastante significativa de la potencia e incluso la distancia máxima recorrida por la bola disminuye algo más de 3 cm. A pesar de eso, todavía se obtiene una potencia mayor a la permitida.
Se vuelve a actuar sobre los parámetros hasta conseguir unos resultados óptimos.
kp1 kd1 kp2 kd2 Control (12) 22 1 38 24
Capítulo 4: Diseño de Detalle 69
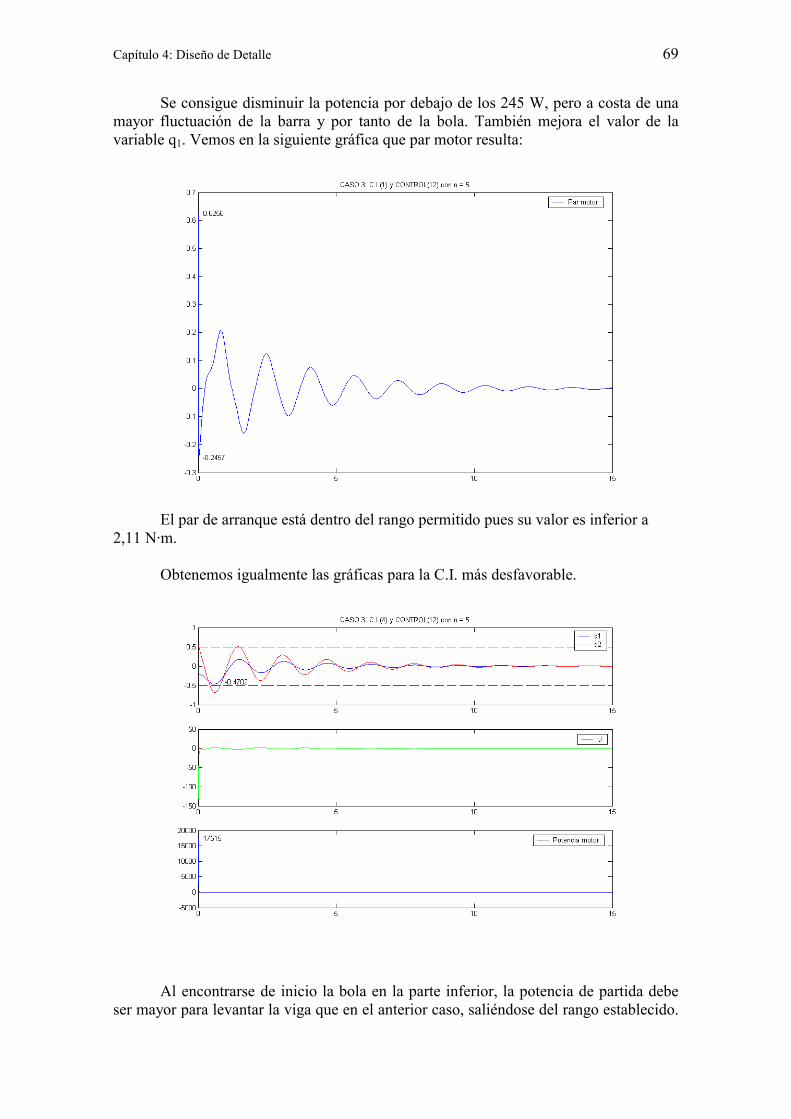
Se consigue disminuir la potencia por debajo de los 245 W, pero a costa de una mayor fluctuación de la barra y por tanto de la bola. También mejora el valor de la variable q1. Vemos en la siguiente gráfica que par motor resulta:
El par de arranque está dentro del rango permitido pues su valor es inferior a 2,11 N·m. Obtenemos igualmente las gráficas para la C.I. más desfavorable.
Al encontrarse de inicio la bola en la parte inferior, la potencia de partida debe
ser mayor para levantar la viga que en el anterior caso, saliéndose del rango establecido.
Capítulo 4: Diseño de Detalle 70
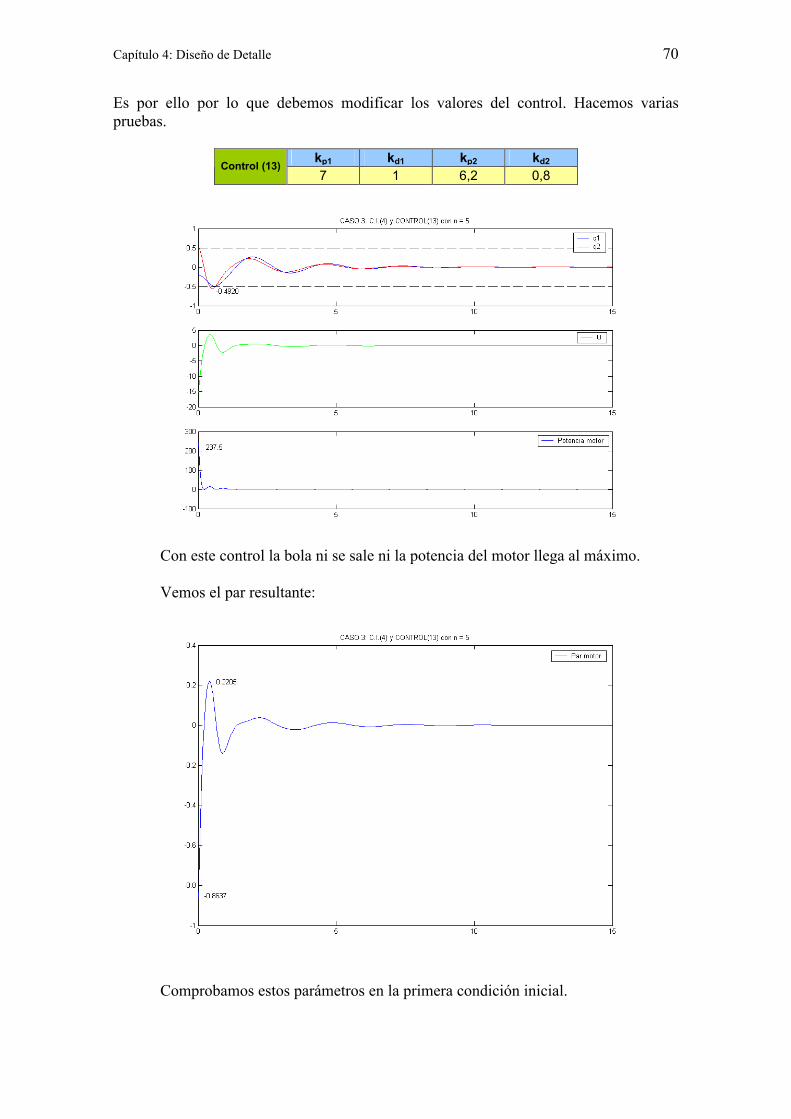
Es por ello por lo que debemos modificar los valores del control. Hacemos varias pruebas.
kp1 kd1 kp2 kd2 Control (13) 7 1 6,2 0,8
Con este control la bola ni se sale ni la potencia del motor llega al máximo.
Vemos el par resultante:
Comprobamos estos parámetros en la primera condición inicial.
Capítulo 4: Diseño de Detalle 71
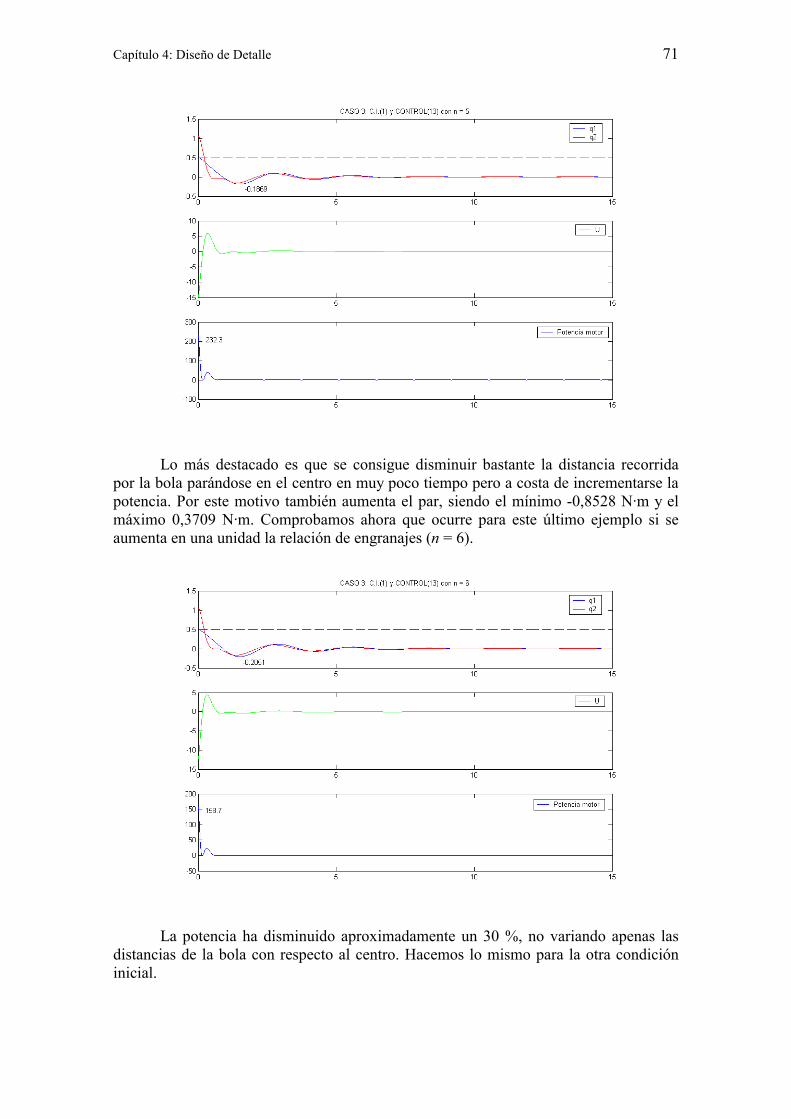
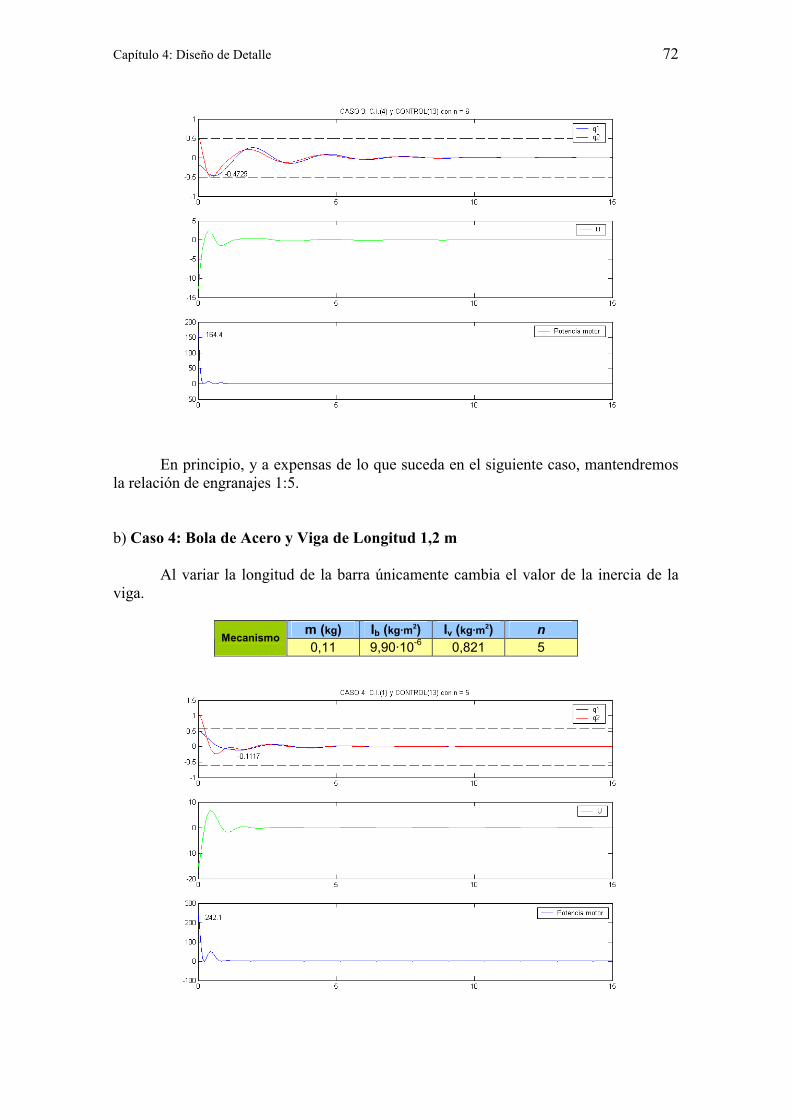
Lo más destacado es que se consigue disminuir bastante la distancia recorrida por la bola parándose en el centro en muy poco tiempo pero a costa de incrementarse la potencia. Por este motivo también aumenta el par, siendo el mínimo -0,8528 N·m y el máximo 0,3709 N·m. Comprobamos ahora que ocurre para este último ejemplo si se aumenta en una unidad la relación de engranajes (n = 6).
La potencia ha disminuido aproximadamente un 30 %, no variando apenas las distancias de la bola con respecto al centro. Hacemos lo mismo para la otra condición inicial.
Capítulo 4: Diseño de Detalle 72
En principio, y a expensas de lo que suceda en el siguiente caso, mantendremos la relación de engranajes 1:5. b) Caso 4: Bola de Acero y Viga de Longitud 1,2 m Al variar la longitud de la barra únicamente cambia el valor de la inercia de la viga.
m (kg) Ib (kg·m2) Iv (kg·m2) n Mecanismo 0,11 9,90·10-6 0,821 5
Capítulo 4: Diseño de Detalle 73
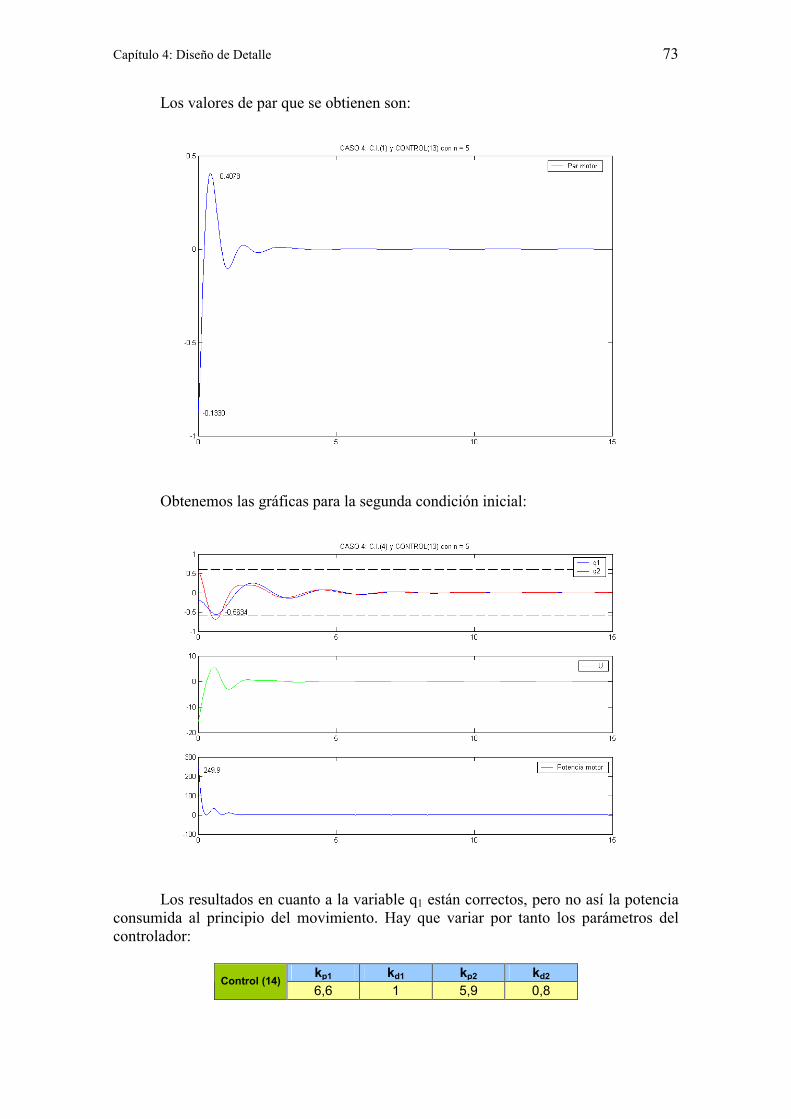
Los valores de par que se obtienen son:
Obtenemos las gráficas para la segunda condición inicial:
Los resultados en cuanto a la variable q1 están correctos, pero no así la potencia consumida al principio del movimiento. Hay que variar por tanto los parámetros del controlador:
kp1 kd1 kp2 kd2 Control (14) 6,6 1 5,9 0,8
Capítulo 4: Diseño de Detalle 74
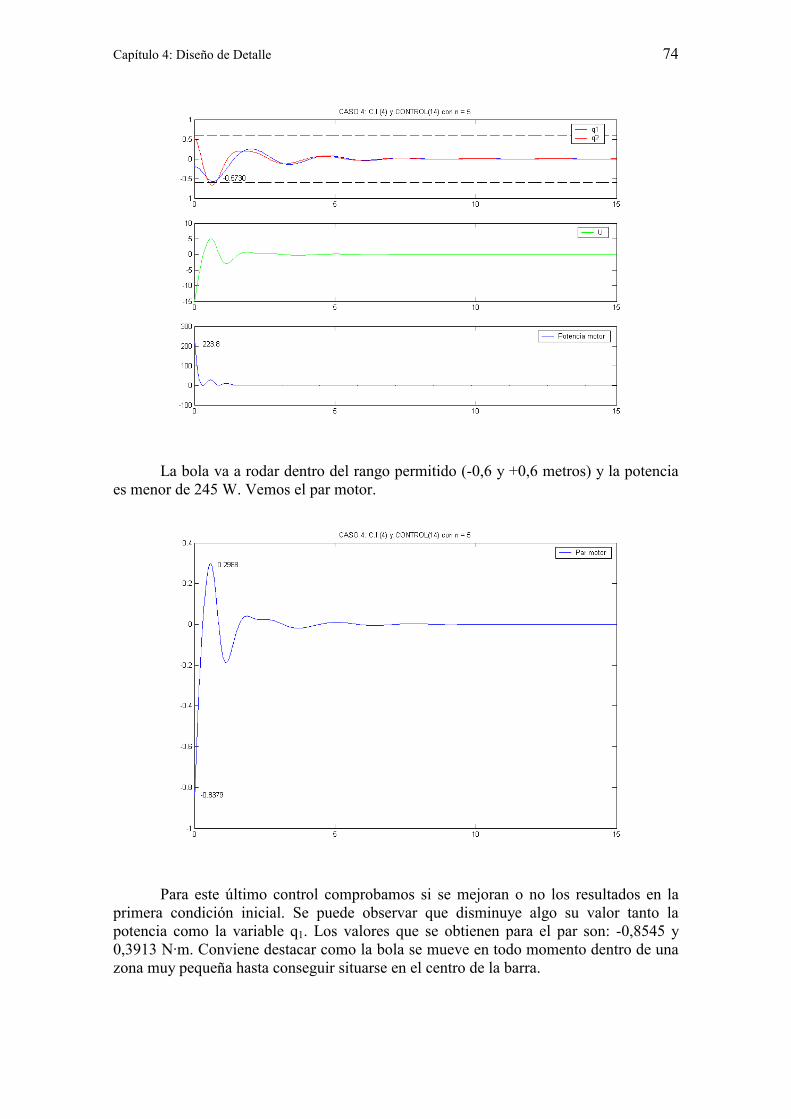
La bola va a rodar dentro del rango permitido (-0,6 y +0,6 metros) y la potencia es menor de 245 W. Vemos el par motor.
Para este último control comprobamos si se mejoran o no los resultados en la primera condición inicial. Se puede observar que disminuye algo su valor tanto la potencia como la variable q1. Los valores que se obtienen para el par son: -0,8545 y 0,3913 N·m. Conviene destacar como la bola se mueve en todo momento dentro de una zona muy pequeña hasta conseguir situarse en el centro de la barra.
Capítulo 4: Diseño de Detalle 75
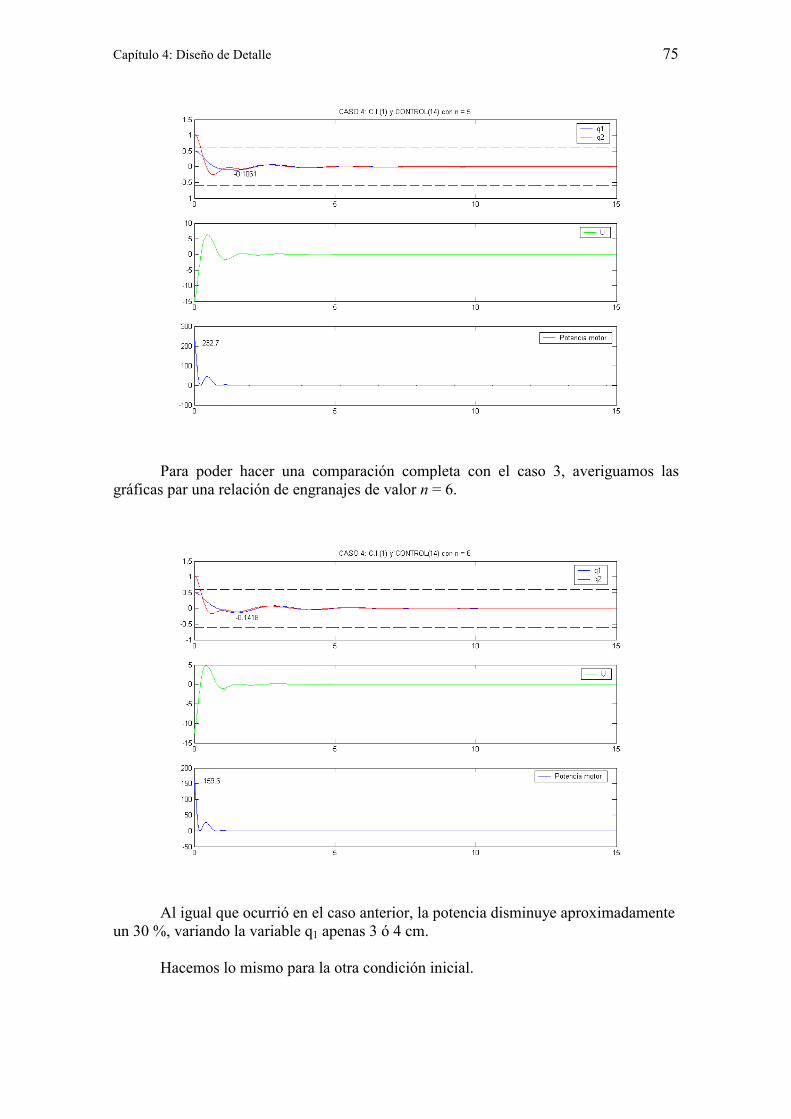
Para poder hacer una comparación completa con el caso 3, averiguamos las gráficas par una relación de engranajes de valor n = 6.
Al igual que ocurrió en el caso anterior, la potencia disminuye aproximadamente un 30 %, variando la variable q1 apenas 3 ó 4 cm. Hacemos lo mismo para la otra condición inicial.
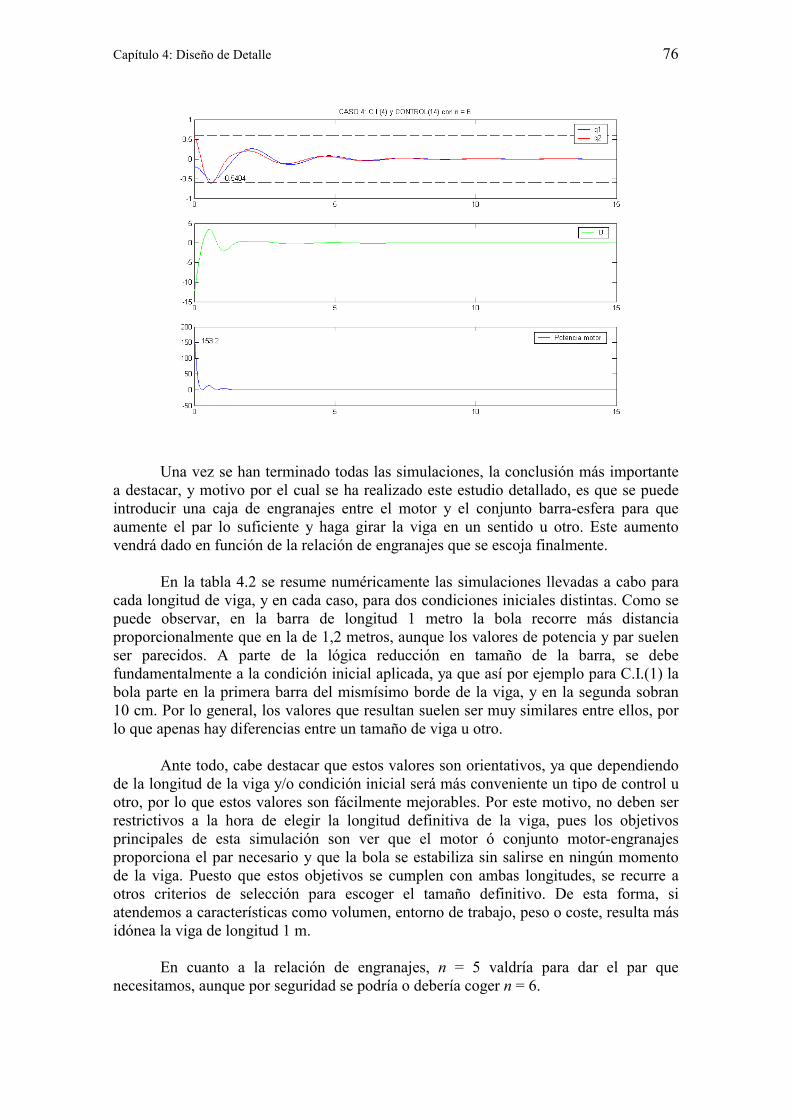
Capítulo 4: Diseño de Detalle 76
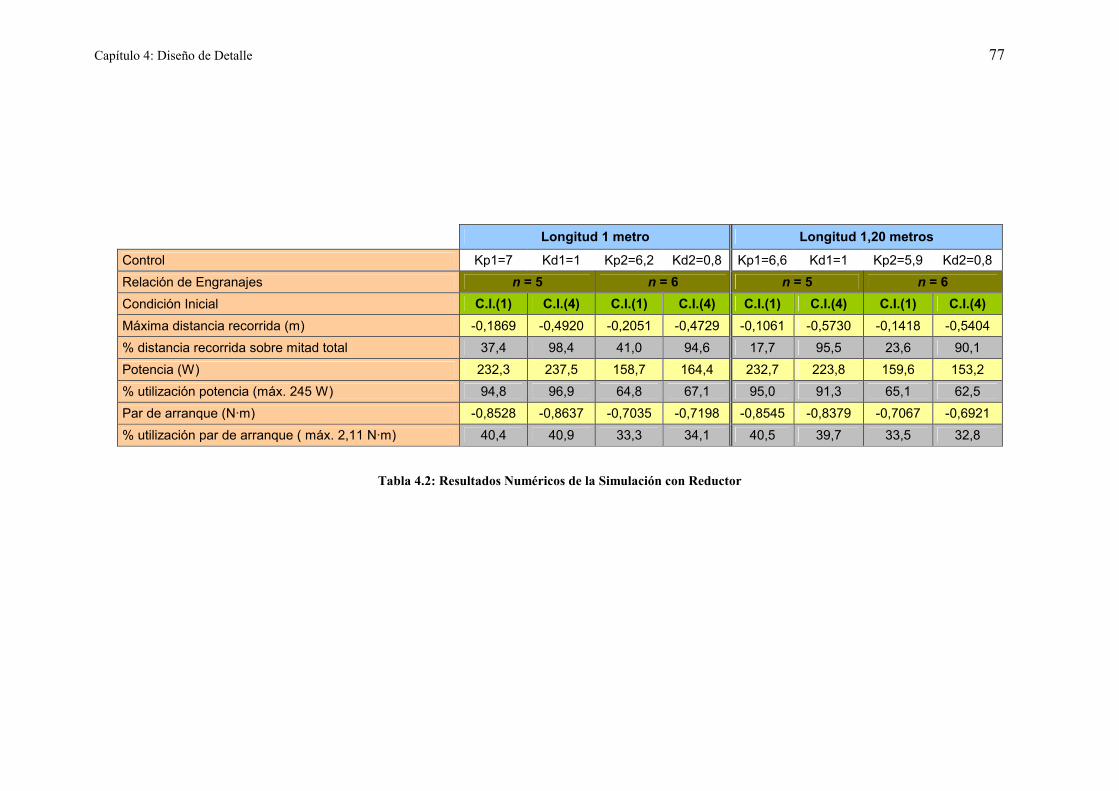
Una vez se han terminado todas las simulaciones, la conclusión más importante a destacar, y motivo por el cual se ha realizado este estudio detallado, es que se puede introducir una caja de engranajes entre el motor y el conjunto barra-esfera para que aumente el par lo suficiente y haga girar la viga en un sentido u otro. Este aumento vendrá dado en función de la relación de engranajes que se escoja finalmente. En la tabla 4.2 se resume numéricamente las simulaciones llevadas a cabo para cada longitud de viga, y en cada caso, para dos condiciones iniciales distintas. Como se puede observar, en la barra de longitud 1 metro la bola recorre más distancia proporcionalmente que en la de 1,2 metros, aunque los valores de potencia y par suelen ser parecidos. A parte de la lógica reducción en tamaño de la barra, se debe fundamentalmente a la condición inicial aplicada, ya que así por ejemplo para C.I.(1) la bola parte en la primera barra del mismísimo borde de la viga, y en la segunda sobran 10 cm. Por lo general, los valores que resultan suelen ser muy similares entre ellos, por lo que apenas hay diferencias entre un tamaño de viga u otro. Ante todo, cabe destacar que estos valores son orientativos, ya que dependiendo de la longitud de la viga y/o condición inicial será más conveniente un tipo de control u otro, por lo que estos valores son fácilmente mejorables. Por este motivo, no deben ser restrictivos a la hora de elegir la longitud definitiva de la viga, pues los objetivos principales de esta simulación son ver que el motor ó conjunto motor-engranajes proporciona el par necesario y que la bola se estabiliza sin salirse en ningún momento de la viga. Puesto que estos objetivos se cumplen con ambas longitudes, se recurre a otros criterios de selección para escoger el tamaño definitivo. De esta forma, si atendemos a características como volumen, entorno de trabajo, peso o coste, resulta más idónea la viga de longitud 1 m. En cuanto a la relación de engranajes, n = 5 valdría para dar el par que necesitamos, aunque por seguridad se podría o debería coger n = 6.
Capítulo 4: Diseño de Detalle 77
Longitud 1 metro Longitud 1,20 metros Control Kp1=7 Kd1=1 Kp2=6,2 Kd2=0,8 Kp1=6,6 Kd1=1 Kp2=5,9 Kd2=0,8 Relación de Engranajes n = 5 n = 6 n = 5 n = 6 Condición Inicial C.I.(1) C.I.(4) C.I.(1) C.I.(4) C.I.(1) C.I.(4) C.I.(1) C.I.(4) Máxima distancia recorrida (m) -0,1869 -0,4920 -0,2051 -0,4729 -0,1061 -0,5730 -0,1418 -0,5404 % distancia recorrida sobre mitad total 37,4 98,4 41,0 94,6 17,7 95,5 23,6 90,1 Potencia (W) 232,3 237,5 158,7 164,4 232,7 223,8 159,6 153,2 % utilización potencia (máx. 245 W) 94,8 96,9 64,8 67,1 95,0 91,3 65,1 62,5 Par de arranque (N·m) -0,8528 -0,8637 -0,7035 -0,7198 -0,8545 -0,8379 -0,7067 -0,6921 % utilización par de arranque ( máx. 2,11 N·m) 40,4 40,9 33,3 34,1 40,5 39,7 33,5 32,8
Tabla 4.2: Resultados Numéricos de la Simulación con Reductor
Capítulo 4: Diseño de Detalle 78
B.
Resto de Elementos
e Integración
Capítulo 4: Diseño de Detalle 79
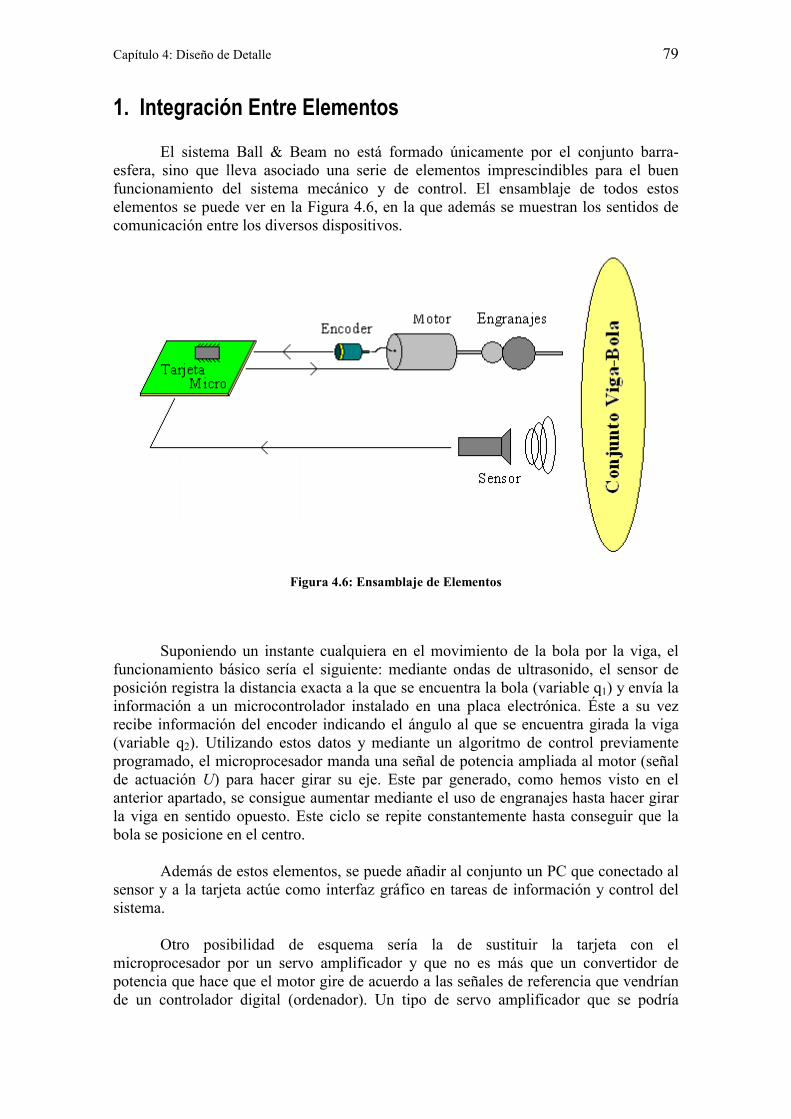
1. Integración Entre Elementos El sistema Ball & Beam no está formado únicamente por el conjunto barra-esfera, sino que lleva asociado una serie de elementos imprescindibles para el buen funcionamiento del sistema mecánico y de control. El ensamblaje de todos estos elementos se puede ver en la Figura 4.6, en la que además se muestran los sentidos de comunicación entre los diversos dispositivos.
Figura 4.6: Ensamblaje de Elementos
Suponiendo un instante cualquiera en el movimiento de la bola por la viga, el funcionamiento básico sería el siguiente: mediante ondas de ultrasonido, el sensor de posición registra la distancia exacta a la que se encuentra la bola (variable q1) y envía la información a un microcontrolador instalado en una placa electrónica. Éste a su vez recibe información del encoder indicando el ángulo al que se encuentra girada la viga (variable q2). Utilizando estos datos y mediante un algoritmo de control previamente programado, el microprocesador manda una señal de potencia ampliada al motor (señal de actuación U) para hacer girar su eje. Este par generado, como hemos visto en el anterior apartado, se consigue aumentar mediante el uso de engranajes hasta hacer girar la viga en sentido opuesto. Este ciclo se repite constantemente hasta conseguir que la bola se posicione en el centro. Además de estos elementos, se puede añadir al conjunto un PC que conectado al sensor y a la tarjeta actúe como interfaz gráfico en tareas de información y control del sistema. Otro posibilidad de esquema sería la de sustituir la tarjeta con el microprocesador por un servo amplificador y que no es más que un convertidor de potencia que hace que el motor gire de acuerdo a las señales de referencia que vendrían de un controlador digital (ordenador). Un tipo de servo amplificador que se podría
Capítulo 4: Diseño de Detalle 80
utilizar en este caso sería el modelo Brush Type PWM Servo Amplifier (25A8) de Advanced Motion Controls, el cual se representa en la Figura 4.7.
Figura 4.7: Servo Amplificador
Por último, mencionar un elemento importante para que el sistema funcione, y que no es más que una fuente de alimentación que de tensión al sensor, motor, encoder y tarjeta. Analizamos ahora de forma independiente cada uno de los elementos no vistos todavía.
2. Encoder Para medir el desplazamiento angular del eje del motor se va a utilizar un encoder incremental. Éste irá ensamblado en la parte trasera del motor a través de un pequeño acoplador. 2.1. Tecnología del encoder El encoder incremental es probablemente el tipo más común de encoder utilizado en la industria, por la gran variedad de aplicaciones que su uso abarca. Este sensor está formado por tres elementos:
• Un disco con franjas transparentes y opacas alternadas, dispuestas en sentido radial.
Capítulo 4: Diseño de Detalle 81
• Un emisor de luz o fotocélula colocado en una cara del disco. • Un receptor de luz en la cara opuesta del emisor.
Al girar el disco, el haz de luz del emisor resultará interceptado por las franjas
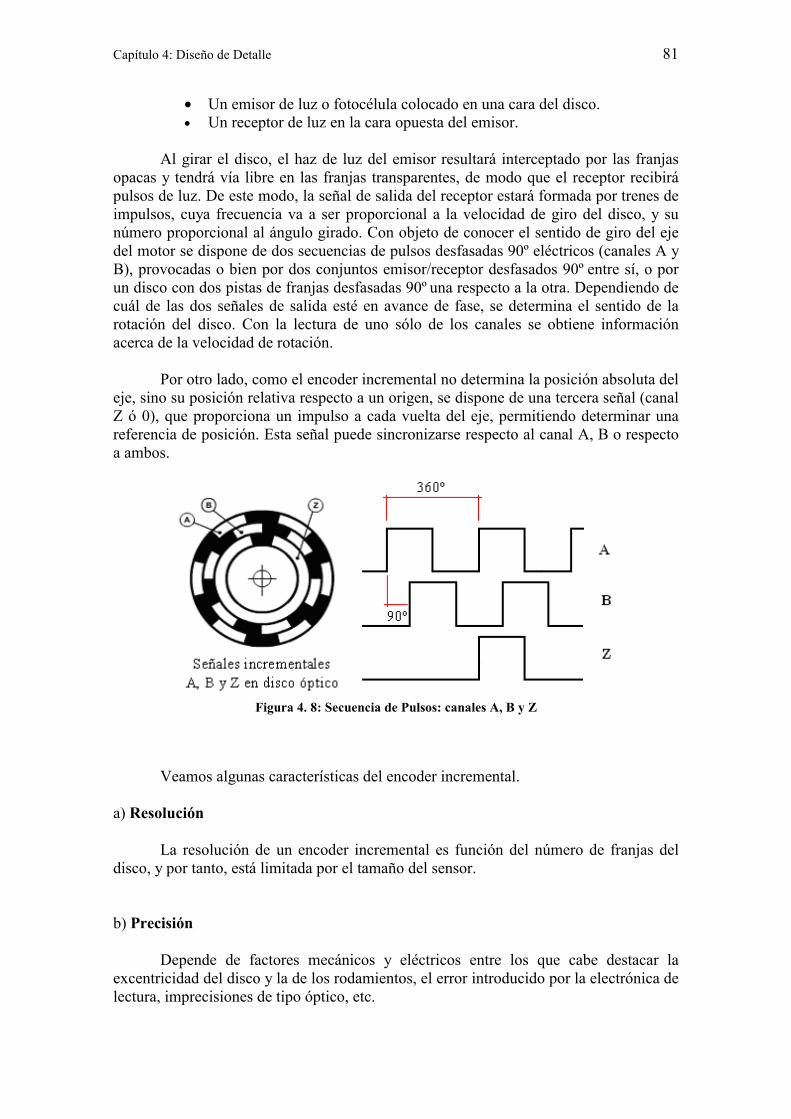
opacas y tendrá vía libre en las franjas transparentes, de modo que el receptor recibirá pulsos de luz. De este modo, la señal de salida del receptor estará formada por trenes de impulsos, cuya frecuencia va a ser proporcional a la velocidad de giro del disco, y su número proporcional al ángulo girado. Con objeto de conocer el sentido de giro del eje del motor se dispone de dos secuencias de pulsos desfasadas 90º eléctricos (canales A y B), provocadas o bien por dos conjuntos emisor/receptor desfasados 90º entre sí, o por un disco con dos pistas de franjas desfasadas 90º una respecto a la otra. Dependiendo de cuál de las dos señales de salida esté en avance de fase, se determina el sentido de la rotación del disco. Con la lectura de uno sólo de los canales se obtiene información acerca de la velocidad de rotación.
Por otro lado, como el encoder incremental no determina la posición absoluta del eje, sino su posición relativa respecto a un origen, se dispone de una tercera señal (canal Z ó 0), que proporciona un impulso a cada vuelta del eje, permitiendo determinar una referencia de posición. Esta señal puede sincronizarse respecto al canal A, B o respecto a ambos.
Figura 4. 8: Secuencia de Pulsos: canales A, B y Z
Veamos algunas características del encoder incremental. a) Resolución La resolución de un encoder incremental es función del número de franjas del disco, y por tanto, está limitada por el tamaño del sensor. b) Precisión Depende de factores mecánicos y eléctricos entre los que cabe destacar la excentricidad del disco y la de los rodamientos, el error introducido por la electrónica de lectura, imprecisiones de tipo óptico, etc.
Capítulo 4: Diseño de Detalle 82
La unidad de medida que define la precisión del encoder es el grado eléctrico. Como 360 º eléctricos corresponden a la rotación mecánica del eje, necesaria para que se realice un ciclo o impulso completo de la señal de salida, para saber los grados mecánicos se aplica la siguiente fórmula:
giroimpulsosnmecanielectri
/ºcosº360cosº360 =
c) Error de división Viene dado por el máximo desplazamiento de dos frentes de onda consecutivos, expresado en grados eléctricos. Este error existe en cualquier encoder y se debe a los factores antes citados. El error de un encoder rotativo o incremental no es acumulativo, es decir, no incrementa cuando el eje da más de una vuelta. 2.2. Descripción encoder usado Se va a utilizar como encoder rotativo o incremental para nuestro sistema el modelo E6B2-CWZ6C de OMRON, de gran utilidad para este tipo de aplicaciones debido a su adecuado tamaño (40 mm de diámetro), amplio rango de tensión de operación (5 a 24 V c.c.) y resolución de hasta 2000 pulsos/revolución. Además presenta la ventaja de que la salida de paso por origen se puede ajustar fácilmente.
Figura 4.9: Encoder Usado
2.2.1. Características generales Algunas de las características más importantes que presenta este encoder son:
• Características eléctricas:
- Tensión de alimentación: de 5 a 24 V c.c. - Intensidad máxima: 80 mA - Salidas: A, B y Z (reversible) - Diferencia de fase de salida: 90º ± 45º entre A y B - Configuración de salida: colector abierto - Tiempos de subida y bajada de la salida: 1 ms máximo - Frecuencia máxima de respuesta: 100 kHz
Capítulo 4: Diseño de Detalle 83
• Características mecánicas:
- Carga del eje: 29,4 N en dirección radial y 19,2 en axial - Momento de inercia: 10-6 kg·m2 máximo - Par de arranque: 980 µN·m máximo - Revolución máxima permisible: 6000 rpm
• Condiciones ambientales:
- Temperatura ambiente de operación: de -10 a 70 ºC (sin hielo) - Humedad ambiente de operación: del 35 al 85 % (sin
condensación)
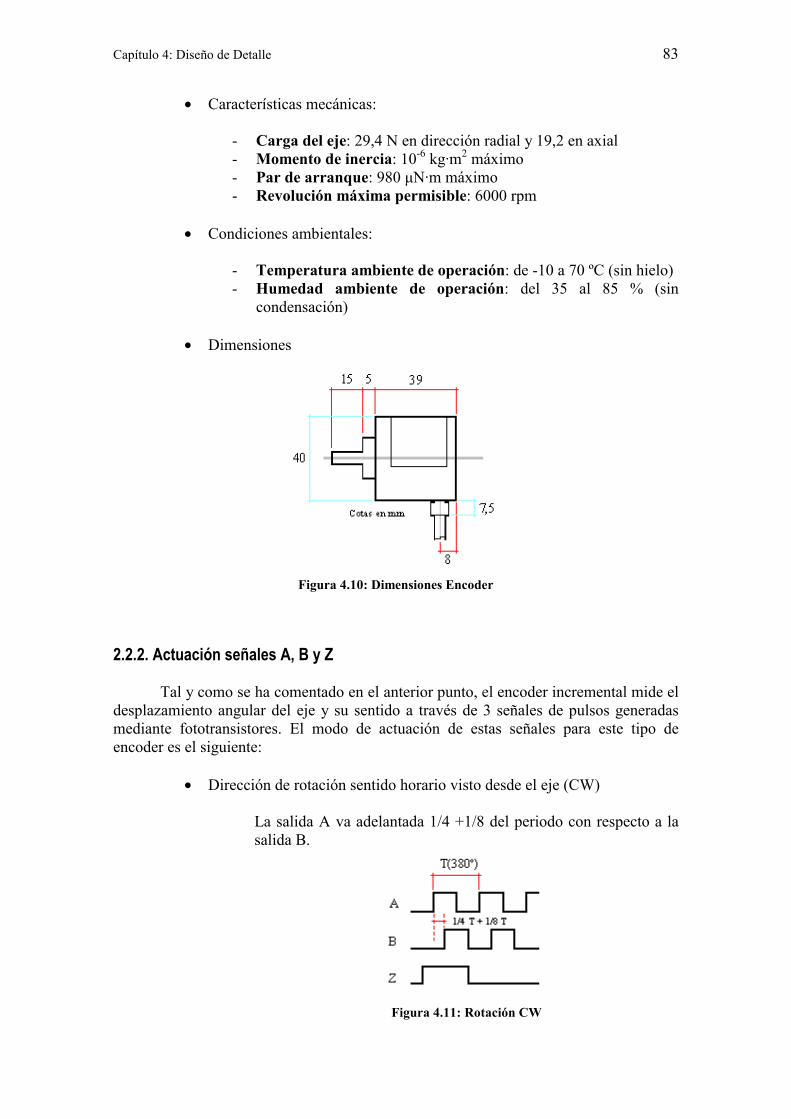
• Dimensiones
Figura 4.10: Dimensiones Encoder
2.2.2. Actuación señales A, B y Z Tal y como se ha comentado en el anterior punto, el encoder incremental mide el desplazamiento angular del eje y su sentido a través de 3 señales de pulsos generadas mediante fototransistores. El modo de actuación de estas señales para este tipo de encoder es el siguiente:
• Dirección de rotación sentido horario visto desde el eje (CW)
La salida A va adelantada 1/4 +1/8 del periodo con respecto a la salida B.
Figura 4.11: Rotación CW
Capítulo 4: Diseño de Detalle 84
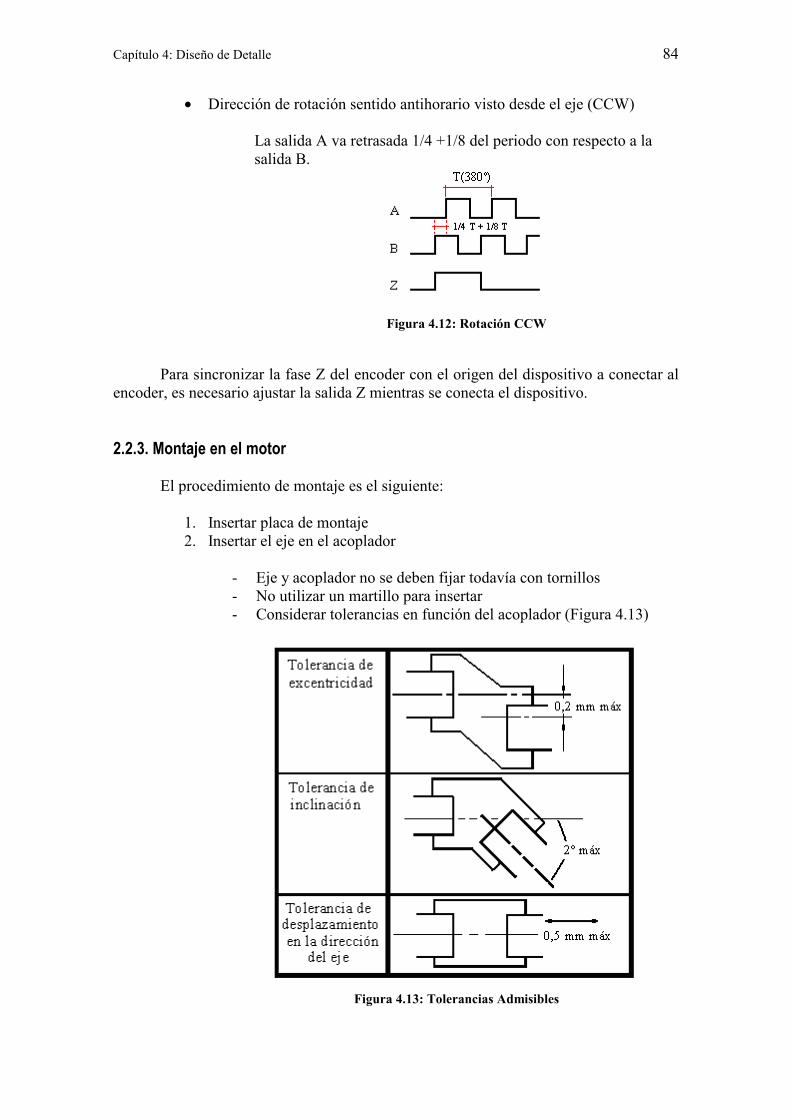
• Dirección de rotación sentido antihorario visto desde el eje (CCW)
La salida A va retrasada 1/4 +1/8 del periodo con respecto a la salida B.
Figura 4.12: Rotación CCW
Para sincronizar la fase Z del encoder con el origen del dispositivo a conectar al
encoder, es necesario ajustar la salida Z mientras se conecta el dispositivo. 2.2.3. Montaje en el motor El procedimiento de montaje es el siguiente:
1. Insertar placa de montaje 2. Insertar el eje en el acoplador
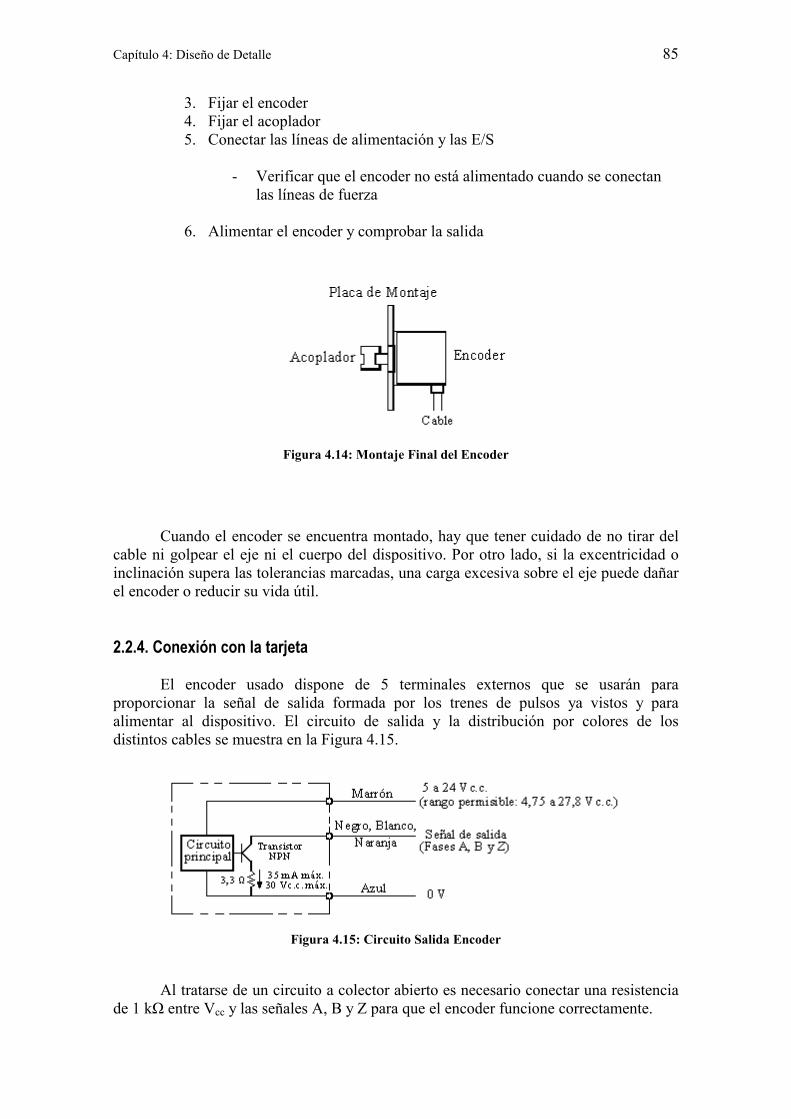
- Eje y acoplador no se deben fijar todavía con tornillos - No utilizar un martillo para insertar - Considerar tolerancias en función del acoplador (Figura 4.13)
Figura 4.13: Tolerancias Admisibles
Capítulo 4: Diseño de Detalle 85
3. Fijar el encoder 4. Fijar el acoplador 5. Conectar las líneas de alimentación y las E/S
- Verificar que el encoder no está alimentado cuando se conectan
las líneas de fuerza
6. Alimentar el encoder y comprobar la salida
Figura 4.14: Montaje Final del Encoder
Cuando el encoder se encuentra montado, hay que tener cuidado de no tirar del
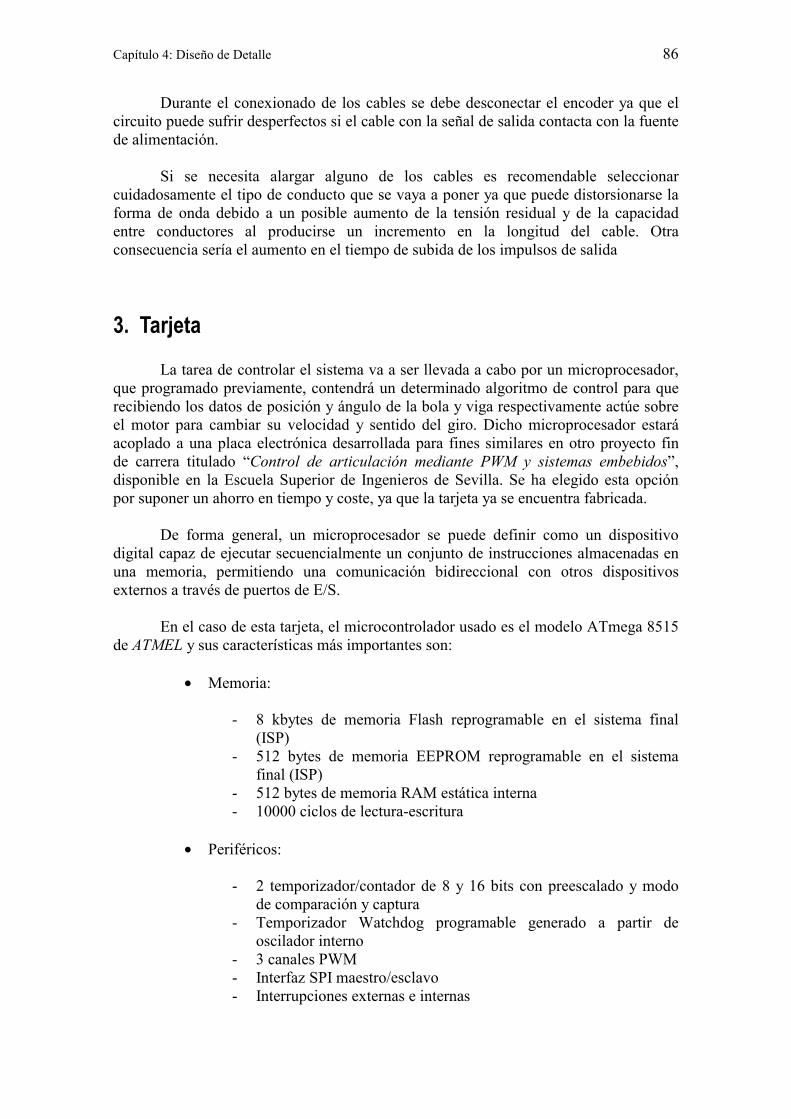
cable ni golpear el eje ni el cuerpo del dispositivo. Por otro lado, si la excentricidad o inclinación supera las tolerancias marcadas, una carga excesiva sobre el eje puede dañar el encoder o reducir su vida útil. 2.2.4. Conexión con la tarjeta El encoder usado dispone de 5 terminales externos que se usarán para proporcionar la señal de salida formada por los trenes de pulsos ya vistos y para alimentar al dispositivo. El circuito de salida y la distribución por colores de los distintos cables se muestra en la Figura 4.15.
Figura 4.15: Circuito Salida Encoder
Al tratarse de un circuito a colector abierto es necesario conectar una resistencia de 1 kΩ entre Vcc y las señales A, B y Z para que el encoder funcione correctamente.
Capítulo 4: Diseño de Detalle 86
Durante el conexionado de los cables se debe desconectar el encoder ya que el circuito puede sufrir desperfectos si el cable con la señal de salida contacta con la fuente de alimentación. Si se necesita alargar alguno de los cables es recomendable seleccionar cuidadosamente el tipo de conducto que se vaya a poner ya que puede distorsionarse la forma de onda debido a un posible aumento de la tensión residual y de la capacidad entre conductores al producirse un incremento en la longitud del cable. Otra consecuencia sería el aumento en el tiempo de subida de los impulsos de salida
3. Tarjeta La tarea de controlar el sistema va a ser llevada a cabo por un microprocesador, que programado previamente, contendrá un determinado algoritmo de control para que recibiendo los datos de posición y ángulo de la bola y viga respectivamente actúe sobre el motor para cambiar su velocidad y sentido del giro. Dicho microprocesador estará acoplado a una placa electrónica desarrollada para fines similares en otro proyecto fin de carrera titulado “Control de articulación mediante PWM y sistemas embebidos”, disponible en la Escuela Superior de Ingenieros de Sevilla. Se ha elegido esta opción por suponer un ahorro en tiempo y coste, ya que la tarjeta ya se encuentra fabricada. De forma general, un microprocesador se puede definir como un dispositivo digital capaz de ejecutar secuencialmente un conjunto de instrucciones almacenadas en una memoria, permitiendo una comunicación bidireccional con otros dispositivos externos a través de puertos de E/S. En el caso de esta tarjeta, el microcontrolador usado es el modelo ATmega 8515 de ATMEL y sus características más importantes son:
• Memoria:
- 8 kbytes de memoria Flash reprogramable en el sistema final (ISP)
- 512 bytes de memoria EEPROM reprogramable en el sistema final (ISP)
- 512 bytes de memoria RAM estática interna - 10000 ciclos de lectura-escritura
• Periféricos:
- 2 temporizador/contador de 8 y 16 bits con preescalado y modo
de comparación y captura - Temporizador Watchdog programable generado a partir de
oscilador interno - 3 canales PWM - Interfaz SPI maestro/esclavo - Interrupciones externas e internas
Capítulo 4: Diseño de Detalle 87
• Rango de funcionamiento:
- Tensión: de 4,5 a 5,5 V - Velocidad: de 0 a 16 MHz
• Otras:
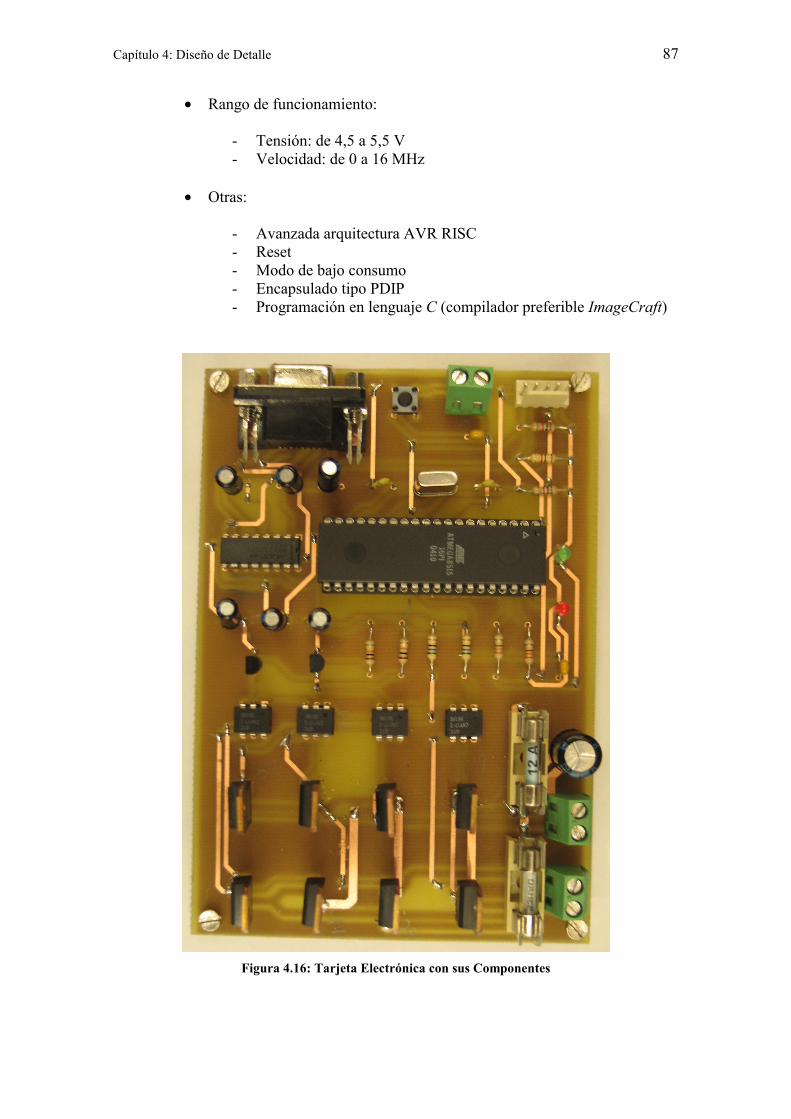
- Avanzada arquitectura AVR RISC - Reset - Modo de bajo consumo - Encapsulado tipo PDIP - Programación en lenguaje C (compilador preferible ImageCraft)
Figura 4.16: Tarjeta Electrónica con sus Componentes
Capítulo 4: Diseño de Detalle 88
En la figura 4.16 se muestra una fotografía de la placa electrónica con todos los componentes, incluido el microprocesador Atmega 8515.
Para realizar todas las tareas citadas anteriormente de comunicación y control
del mecanismo, la tarjeta se divide claramente en dos circuitos:
• De control: es el que posee propiamente al microprocesador, siendo su objetivo principal controlar la velocidad del motor. Trabaja a 5 V.
• De potencia: es el que se encarga de producir el giro del motor,
amplificando la señal. Trabaja a 24 V.
Ambos circuitos se aíslan el uno del otro mediante optoacopladores, lo que tiene la ventaja de una alta velocidad de conmutación. Veamos cada circuito con más detalle. 3.1. Circuito de control El circuito de control realiza básicamente las siguientes funciones:
1) Comunicación con el sensor
El circuito, y más concretamente el microcontrolador, recibe información acerca de la posición exacta de la bola. Se hace a través de puerto serie RS-232, ya que este tipo de microprocesador viene preparado para recibir tales señales de forma sencilla y eficiente (mediante conexión a la USART).
2) Comunicación con el encoder
El circuito también recibe lectura de la posición (ángulo) y velocidad del eje del motor. Las salidas y alimentación del encoder se conectan directamente a los pines del microcontrolador.
3) Operaciones y algoritmo de control
Mediante lenguaje C se programan las instrucciones que debe seguir el microprocesador para calcular la tensión de entrada (actuación) que se le debe dar al motor para hacer girar a cierta velocidad la viga. Se utilizan los datos obtenidos del sensor y del encoder. Es necesario el uso de un temporizador que regularice el ciclo. También se tienen en cuenta las posibles interrupciones que le lleguen al micro.
4) Envío de señal PWM al circuito de potencia
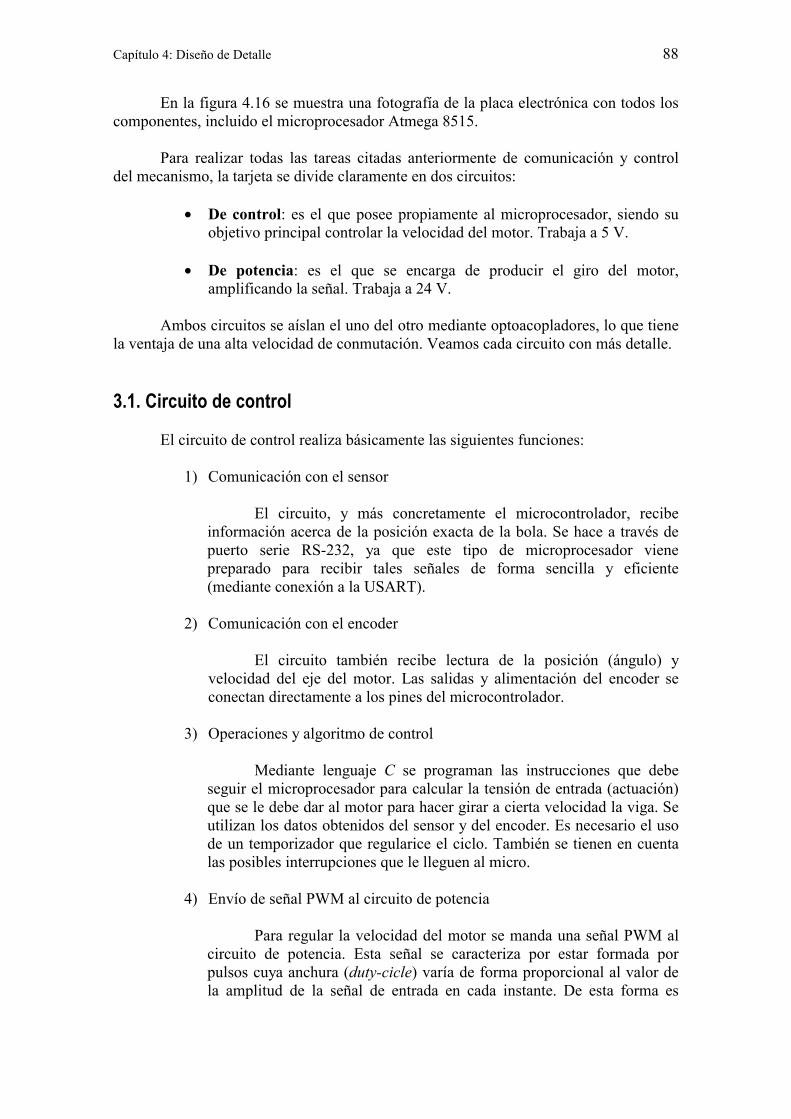
Para regular la velocidad del motor se manda una señal PWM al circuito de potencia. Esta señal se caracteriza por estar formada por pulsos cuya anchura (duty-cicle) varía de forma proporcional al valor de la amplitud de la señal de entrada en cada instante. De esta forma es
Capítulo 4: Diseño de Detalle 89
posible obtener una corriente continua cuyo valor medio variará dependiendo de la duración del pulso positivo.
Figura 4.17: Señal PWM y Tensión Media
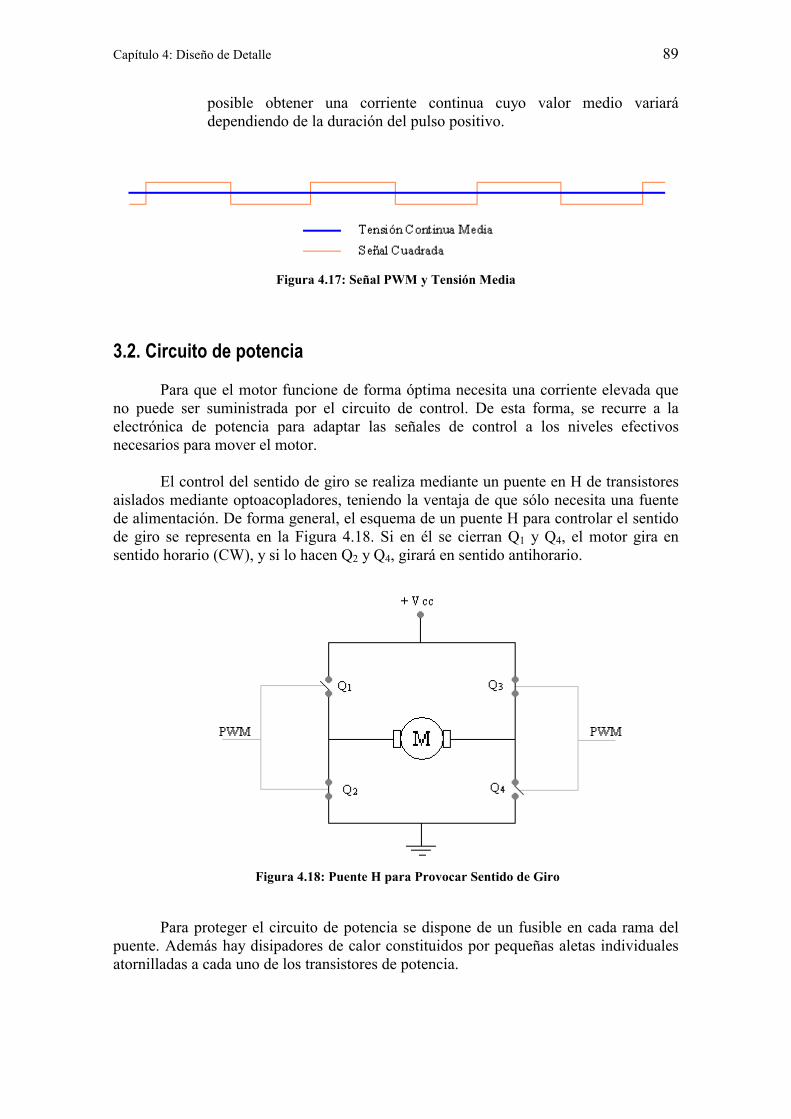
3.2. Circuito de potencia Para que el motor funcione de forma óptima necesita una corriente elevada que no puede ser suministrada por el circuito de control. De esta forma, se recurre a la electrónica de potencia para adaptar las señales de control a los niveles efectivos necesarios para mover el motor. El control del sentido de giro se realiza mediante un puente en H de transistores aislados mediante optoacopladores, teniendo la ventaja de que sólo necesita una fuente de alimentación. De forma general, el esquema de un puente H para controlar el sentido de giro se representa en la Figura 4.18. Si en él se cierran Q1 y Q4, el motor gira en sentido horario (CW), y si lo hacen Q2 y Q4, girará en sentido antihorario.
Figura 4.18: Puente H para Provocar Sentido de Giro
Para proteger el circuito de potencia se dispone de un fusible en cada rama del puente. Además hay disipadores de calor constituidos por pequeñas aletas individuales atornilladas a cada uno de los transistores de potencia.
Capítulo 4: Diseño de Detalle 90
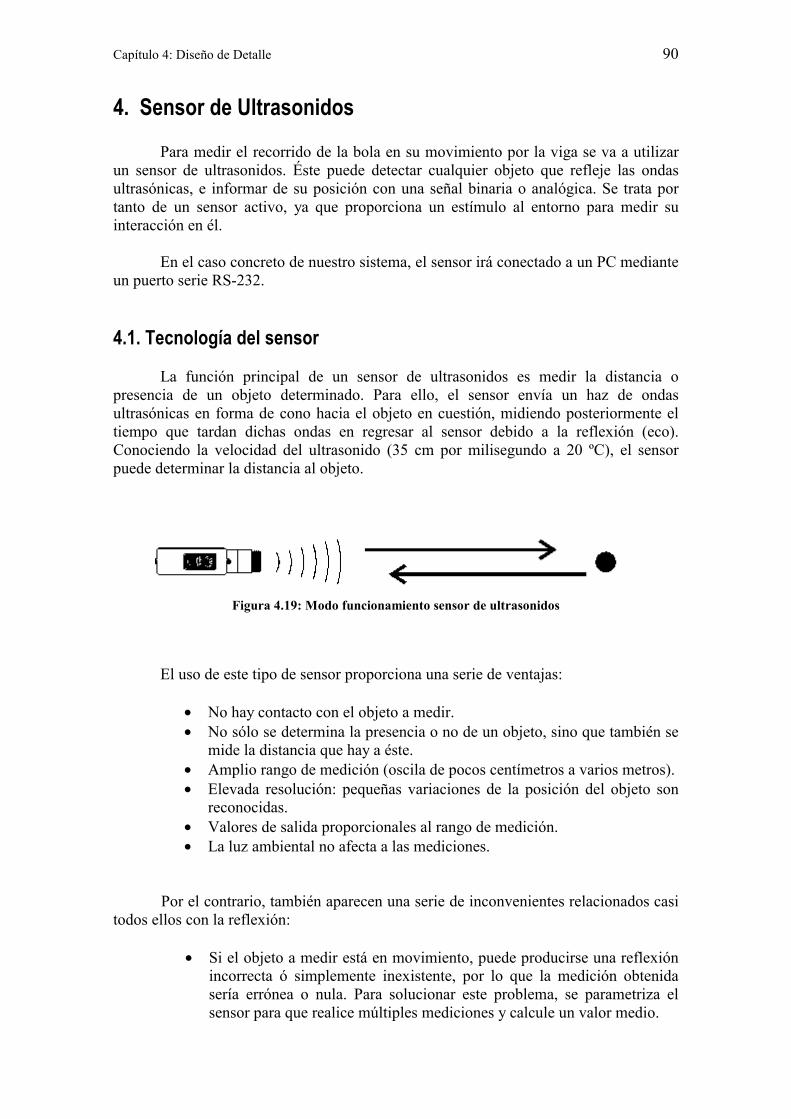
4. Sensor de Ultrasonidos Para medir el recorrido de la bola en su movimiento por la viga se va a utilizar un sensor de ultrasonidos. Éste puede detectar cualquier objeto que refleje las ondas ultrasónicas, e informar de su posición con una señal binaria o analógica. Se trata por tanto de un sensor activo, ya que proporciona un estímulo al entorno para medir su interacción en él. En el caso concreto de nuestro sistema, el sensor irá conectado a un PC mediante un puerto serie RS-232. 4.1. Tecnología del sensor La función principal de un sensor de ultrasonidos es medir la distancia o presencia de un objeto determinado. Para ello, el sensor envía un haz de ondas ultrasónicas en forma de cono hacia el objeto en cuestión, midiendo posteriormente el tiempo que tardan dichas ondas en regresar al sensor debido a la reflexión (eco). Conociendo la velocidad del ultrasonido (35 cm por milisegundo a 20 ºC), el sensor puede determinar la distancia al objeto.
Figura 4.19: Modo funcionamiento sensor de ultrasonidos
El uso de este tipo de sensor proporciona una serie de ventajas:
• No hay contacto con el objeto a medir. • No sólo se determina la presencia o no de un objeto, sino que también se
mide la distancia que hay a éste. • Amplio rango de medición (oscila de pocos centímetros a varios metros). • Elevada resolución: pequeñas variaciones de la posición del objeto son
reconocidas. • Valores de salida proporcionales al rango de medición. • La luz ambiental no afecta a las mediciones.
Por el contrario, también aparecen una serie de inconvenientes relacionados casi todos ellos con la reflexión:
• Si el objeto a medir está en movimiento, puede producirse una reflexión incorrecta ó simplemente inexistente, por lo que la medición obtenida sería errónea o nula. Para solucionar este problema, se parametriza el sensor para que realice múltiples mediciones y calcule un valor medio.
Capítulo 4: Diseño de Detalle 91
• Reflejos especulares: la dirección del reflejo depende del ángulo de incidencia.
• Cuanto más pulida sea la superficie del objeto, peor será la reflexión. • La medición de objetos muy lejanos puede producir medidas erróneas
por la presencia de otros elementos.
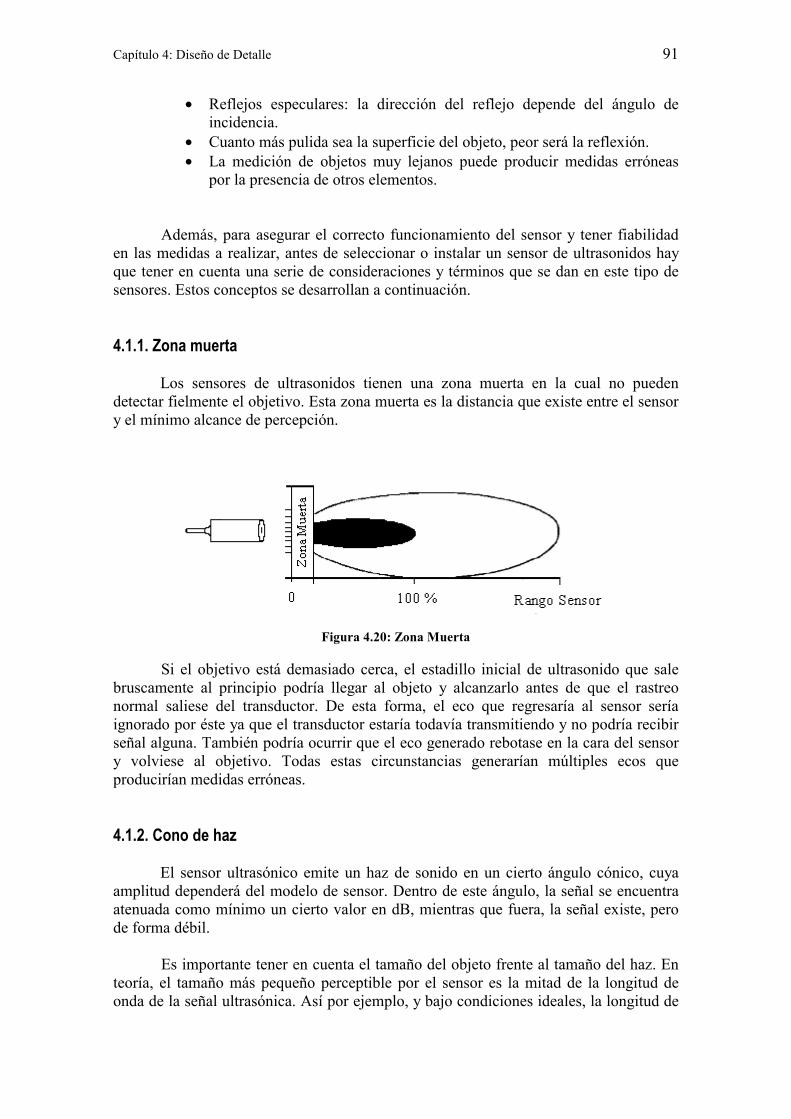
Además, para asegurar el correcto funcionamiento del sensor y tener fiabilidad en las medidas a realizar, antes de seleccionar o instalar un sensor de ultrasonidos hay que tener en cuenta una serie de consideraciones y términos que se dan en este tipo de sensores. Estos conceptos se desarrollan a continuación. 4.1.1. Zona muerta Los sensores de ultrasonidos tienen una zona muerta en la cual no pueden detectar fielmente el objetivo. Esta zona muerta es la distancia que existe entre el sensor y el mínimo alcance de percepción.
Figura 4.20: Zona Muerta
Si el objetivo está demasiado cerca, el estadillo inicial de ultrasonido que sale bruscamente al principio podría llegar al objeto y alcanzarlo antes de que el rastreo normal saliese del transductor. De esta forma, el eco que regresaría al sensor sería ignorado por éste ya que el transductor estaría todavía transmitiendo y no podría recibir señal alguna. También podría ocurrir que el eco generado rebotase en la cara del sensor y volviese al objetivo. Todas estas circunstancias generarían múltiples ecos que producirían medidas erróneas.
4.1.2. Cono de haz El sensor ultrasónico emite un haz de sonido en un cierto ángulo cónico, cuya amplitud dependerá del modelo de sensor. Dentro de este ángulo, la señal se encuentra atenuada como mínimo un cierto valor en dB, mientras que fuera, la señal existe, pero de forma débil.
Es importante tener en cuenta el tamaño del objeto frente al tamaño del haz. En teoría, el tamaño más pequeño perceptible por el sensor es la mitad de la longitud de onda de la señal ultrasónica. Así por ejemplo, y bajo condiciones ideales, la longitud de
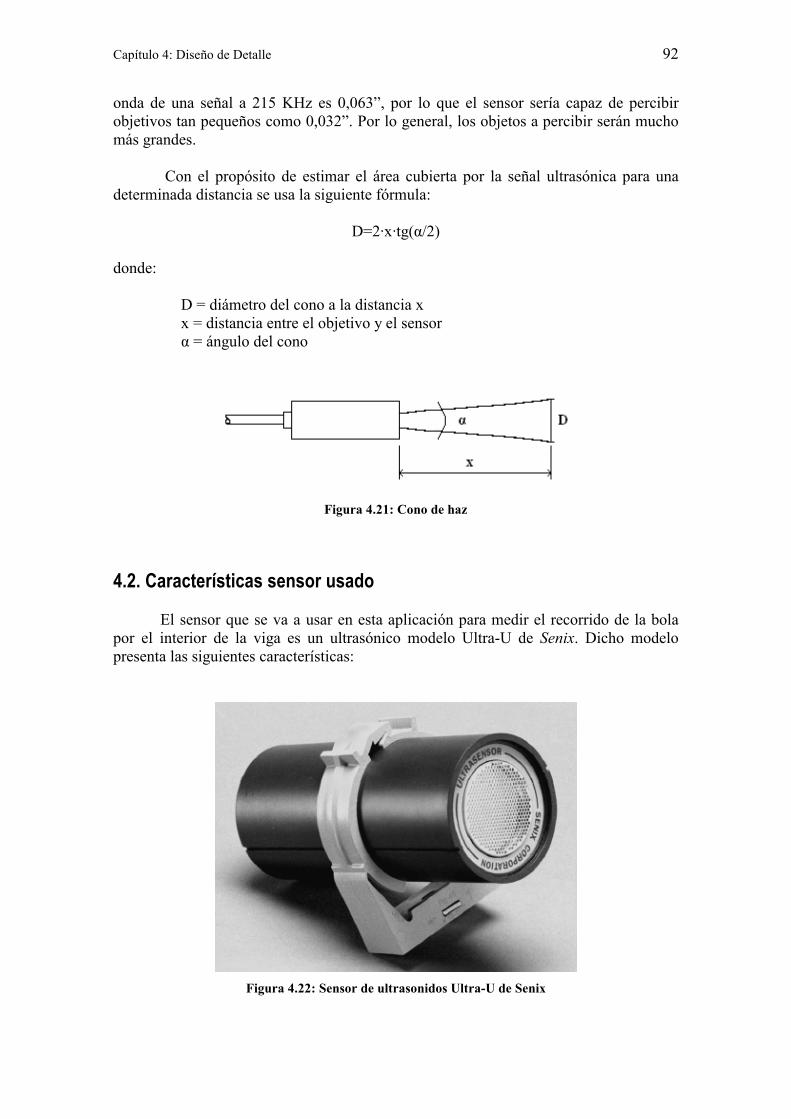
Capítulo 4: Diseño de Detalle 92
onda de una señal a 215 KHz es 0,063”, por lo que el sensor sería capaz de percibir objetivos tan pequeños como 0,032”. Por lo general, los objetos a percibir serán mucho más grandes.
Con el propósito de estimar el área cubierta por la señal ultrasónica para una
determinada distancia se usa la siguiente fórmula:
D=2·x·tg(α/2)
donde: D = diámetro del cono a la distancia x x = distancia entre el objetivo y el sensor α = ángulo del cono
Figura 4.21: Cono de haz
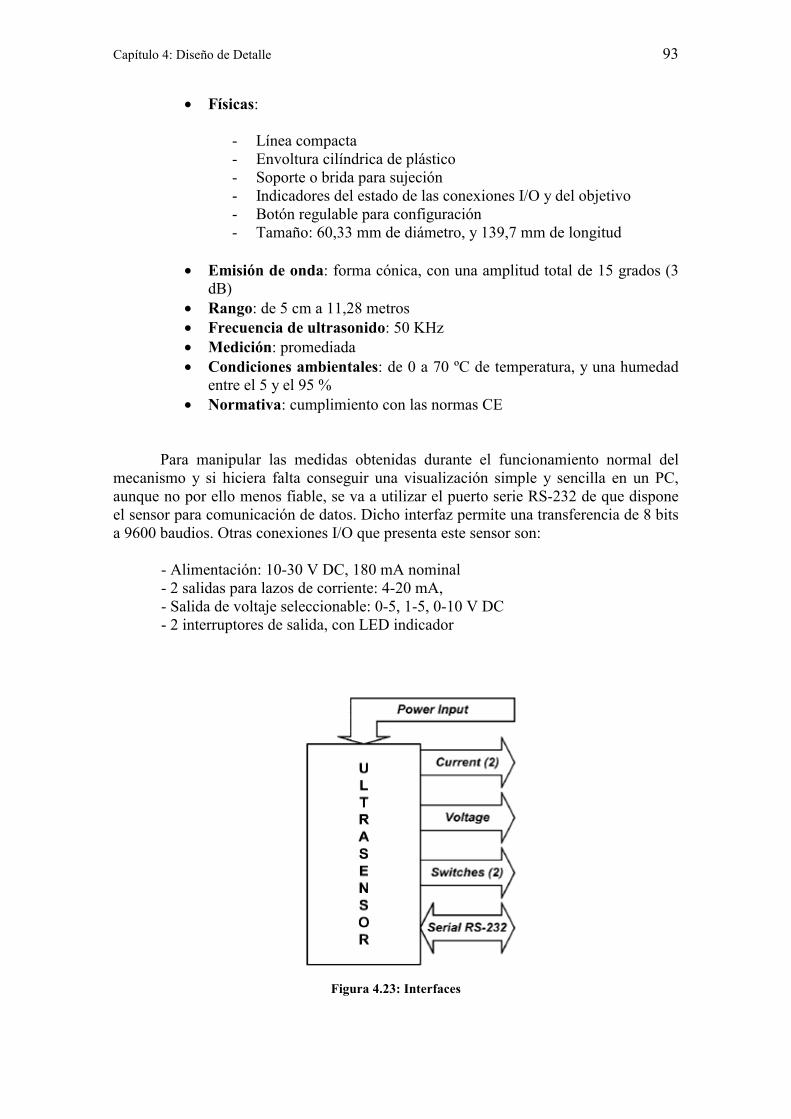
4.2. Características sensor usado El sensor que se va a usar en esta aplicación para medir el recorrido de la bola por el interior de la viga es un ultrasónico modelo Ultra-U de Senix. Dicho modelo presenta las siguientes características:
Figura 4.22: Sensor de ultrasonidos Ultra-U de Senix
Capítulo 4: Diseño de Detalle 93
• Físicas:
- Línea compacta - Envoltura cilíndrica de plástico - Soporte o brida para sujeción - Indicadores del estado de las conexiones I/O y del objetivo - Botón regulable para configuración - Tamaño: 60,33 mm de diámetro, y 139,7 mm de longitud
• Emisión de onda: forma cónica, con una amplitud total de 15 grados (3
dB) • Rango: de 5 cm a 11,28 metros • Frecuencia de ultrasonido: 50 KHz • Medición: promediada • Condiciones ambientales: de 0 a 70 ºC de temperatura, y una humedad
entre el 5 y el 95 % • Normativa: cumplimiento con las normas CE
Para manipular las medidas obtenidas durante el funcionamiento normal del mecanismo y si hiciera falta conseguir una visualización simple y sencilla en un PC, aunque no por ello menos fiable, se va a utilizar el puerto serie RS-232 de que dispone el sensor para comunicación de datos. Dicho interfaz permite una transferencia de 8 bits a 9600 baudios. Otras conexiones I/O que presenta este sensor son:
- Alimentación: 10-30 V DC, 180 mA nominal - 2 salidas para lazos de corriente: 4-20 mA, - Salida de voltaje seleccionable: 0-5, 1-5, 0-10 V DC - 2 interruptores de salida, con LED indicador
Figura 4.23: Interfaces
Capítulo 4: Diseño de Detalle 94
Todas estas conexiones se encuentran situadas en la parte trasera el sensor (Figura 4.24).
Figura 4.24: Situación conexiones
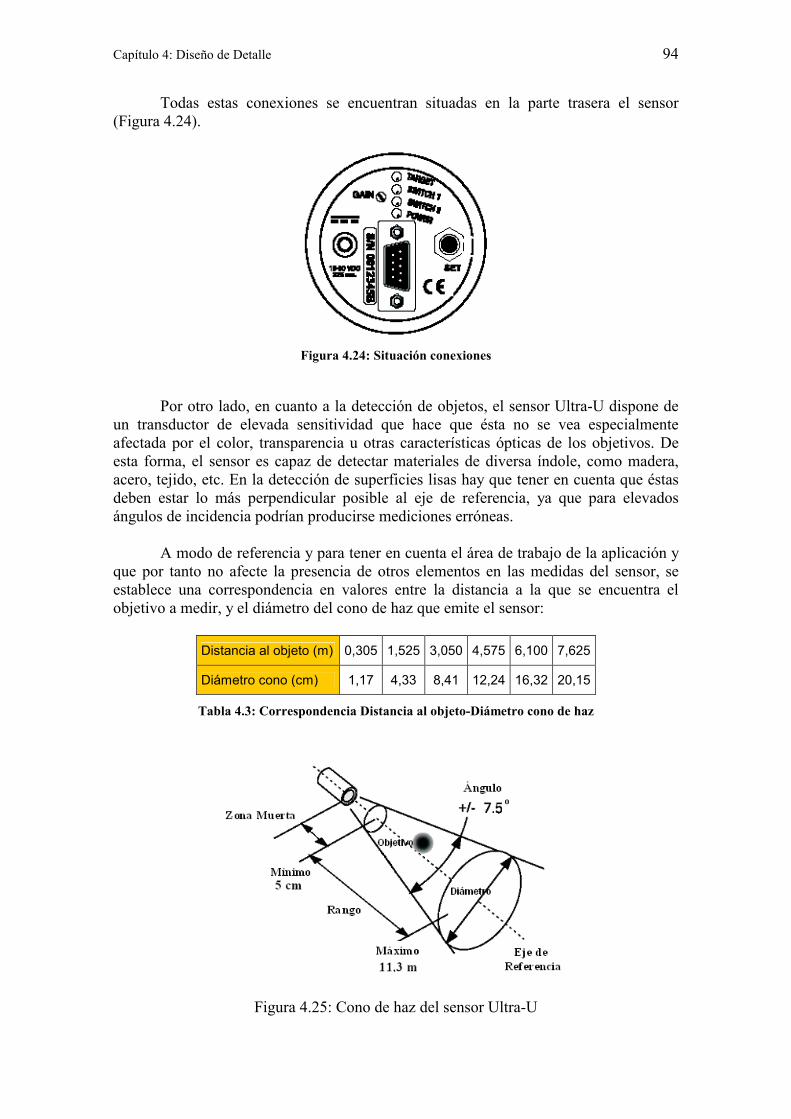
Por otro lado, en cuanto a la detección de objetos, el sensor Ultra-U dispone de un transductor de elevada sensitividad que hace que ésta no se vea especialmente afectada por el color, transparencia u otras características ópticas de los objetivos. De esta forma, el sensor es capaz de detectar materiales de diversa índole, como madera, acero, tejido, etc. En la detección de superficies lisas hay que tener en cuenta que éstas deben estar lo más perpendicular posible al eje de referencia, ya que para elevados ángulos de incidencia podrían producirse mediciones erróneas. A modo de referencia y para tener en cuenta el área de trabajo de la aplicación y que por tanto no afecte la presencia de otros elementos en las medidas del sensor, se establece una correspondencia en valores entre la distancia a la que se encuentra el objetivo a medir, y el diámetro del cono de haz que emite el sensor:
Distancia al objeto (m) 0,305 1,525 3,050 4,575 6,100 7,625
Diámetro cono (cm) 1,17 4,33 8,41 12,24 16,32 20,15
Tabla 4.3: Correspondencia Distancia al objeto-Diámetro cono de haz
Figura 4.25: Cono de haz del sensor Ultra-U

Capítulo 4: Diseño de Detalle 95
5. Alimentación del Sistema La fuente de alimentación del sistema debe proporcionar dos salidas de corriente continua para los dos circuitos de la tarjeta de control. Los valores en voltaje son:
• Circuito de control: 5 V • Circuito de potencia: 24 V
La corriente máxima que debe suministrar la fuente se dará cuando la fuerza
electromotriz sea cero:
AVRKVim
ein 2596,0
24 =Ω
=⋅−
=•θ
siendo la nominal 4,9 A. Teniendo en cuenta los valores de tensión, es recomendable seleccionar una
fuente de alimentación cuyo voltaje sea entre 10 o 50 % más alto que la máxima tensión requerida. Esto es para tener en cuenta las variaciones en Km y Ke y las pérdidas externas.
Una mala elección de la fuente de tensión podría causar una sobreaceleración
mecánica en el caso de un mal funcionamiento de la señal amplificada procedente de la tarjeta. Además, los motores con escobillas deben tener limitaciones de tensión debido a los colectores mecánicos.
Por otro lado, la corriente media que suministra una fuente de alimentación no va a ser la misma que la corriente que circula por el motor, sino que va a ser función de ésta y de ciclos de pulsos PWM: cuando el transistor se activa, la corriente de la fuente es la misma que la del motor; si se desactiva, la corriente es cero. De esta forma, para un 30 % del ciclo y 12 A de corriente del motor, la corriente resultante de la fuente será 4 A.
Según estas afirmaciones, se puede añadir como conclusión que la potencia suministrada por la fuente va a ser de 3 a 5 % más que la potencia a la entrada del motor.
Capítulo 4: Diseño de Detalle 96
C.
Pruebas con el
Sensor de Ultrasonidos
Capítulo 4: Diseño de Detalle 97
1. Objetivos
Una vez definidos los elementos más importantes de que consta el sistema Ball & Beam, nos centramos en el estudio detallado del sensor de ultrasonidos para:
• Comprobar el correcto funcionamiento del sensor • Ver el efecto en la reflexión que produce la presencia de posibles objetos
en las inmediaciones del mecanismo.
Para conseguir estos objetivos se van a realizar una serie de pruebas en diferentes conductos.
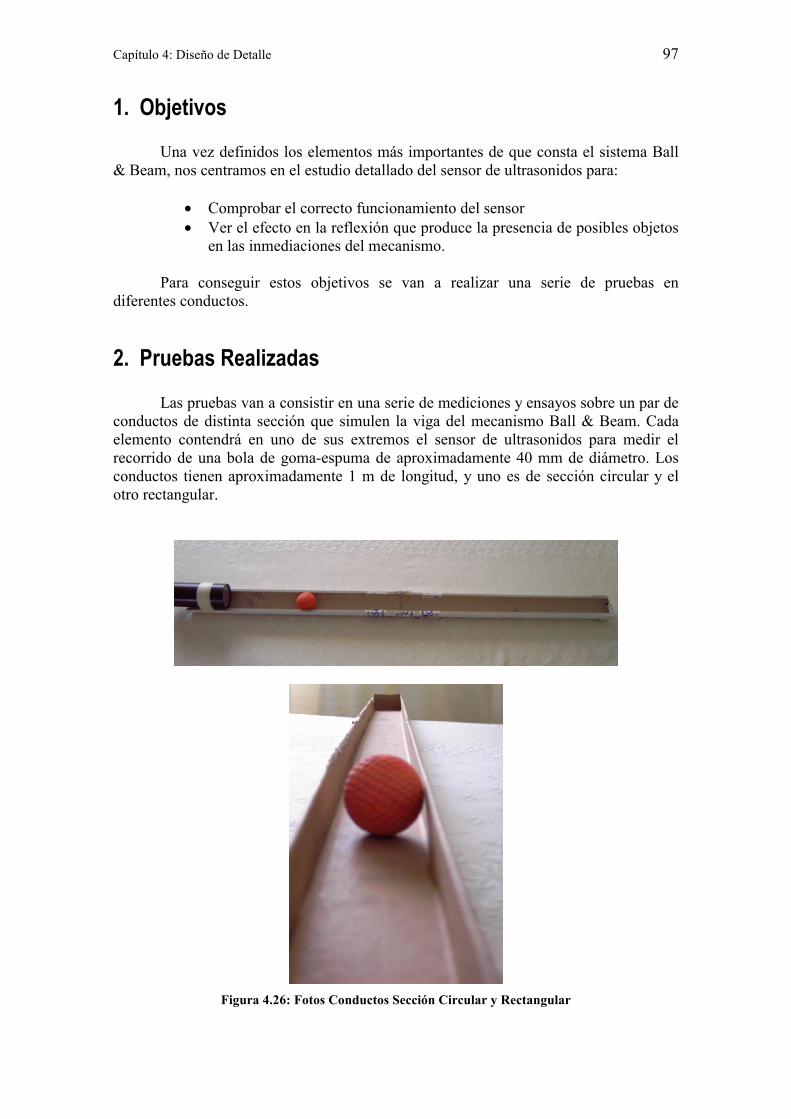
2. Pruebas Realizadas Las pruebas van a consistir en una serie de mediciones y ensayos sobre un par de conductos de distinta sección que simulen la viga del mecanismo Ball & Beam. Cada elemento contendrá en uno de sus extremos el sensor de ultrasonidos para medir el recorrido de una bola de goma-espuma de aproximadamente 40 mm de diámetro. Los conductos tienen aproximadamente 1 m de longitud, y uno es de sección circular y el otro rectangular.
Figura 4.26: Fotos Conductos Sección Circular y Rectangular
Capítulo 4: Diseño de Detalle 98
Mediante un adaptador que ya trae el sensor de fábrica, se conecta éste al puerto serie de un PC para la adquisición digital de los resultados que se vayan produciendo. La visualización y tratamiento de dichas señales se hará mediante un software específico para tal fin. Hay dos posibilidades:
• SoftSpan (WinSpan): software propio de Senix que permite, además de la visualización gráfica de la señal, la configuración y ajuste de los parámetros regulables del sensor. Las distintas configuraciones pueden ser almacenadas en la memoria no volátil del sensor o en un disco externo. Simplifica la instalación.
• LabView: es un lenguaje de programación gráfico para el diseño de
sistemas de adquisición de datos, instrumentación y control. Permite diseñar interfaces de usuario mediante una consola interactiva basada en software. Tiene la ventaja de que permite una fácil integración con hardware, específicamente con tarjetas de medición, adquisición y procesamiento de datos (incluyendo adquisición de imágenes).
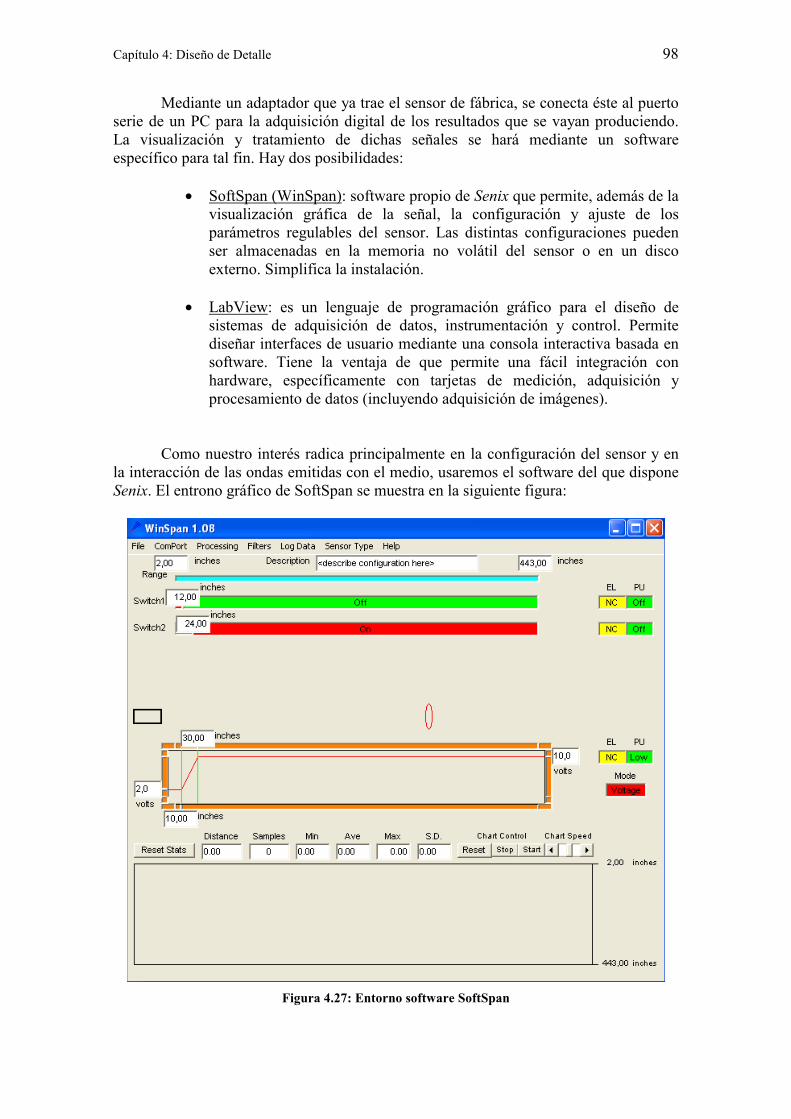
Como nuestro interés radica principalmente en la configuración del sensor y en la interacción de las ondas emitidas con el medio, usaremos el software del que dispone Senix. El entrono gráfico de SoftSpan se muestra en la siguiente figura:
Figura 4.27: Entorno software SoftSpan
Capítulo 4: Diseño de Detalle 99
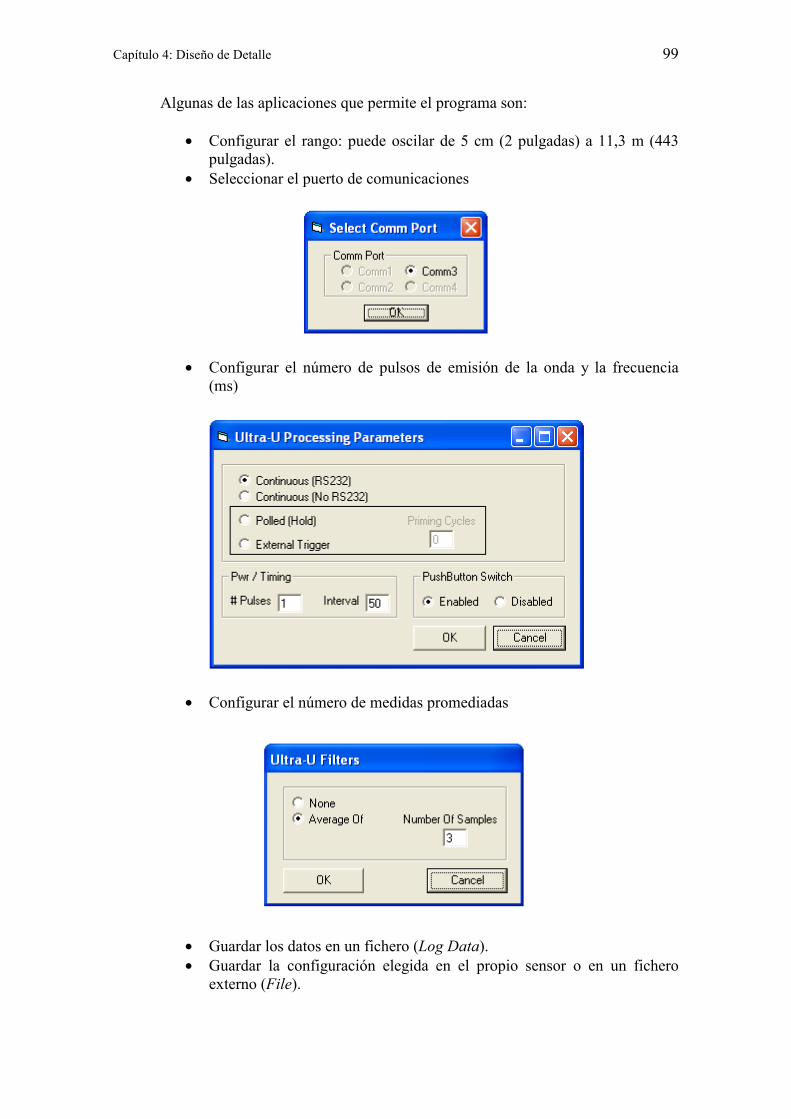
Algunas de las aplicaciones que permite el programa son:
• Configurar el rango: puede oscilar de 5 cm (2 pulgadas) a 11,3 m (443 pulgadas).
• Seleccionar el puerto de comunicaciones
• Configurar el número de pulsos de emisión de la onda y la frecuencia (ms)
• Configurar el número de medidas promediadas
• Guardar los datos en un fichero (Log Data). • Guardar la configuración elegida en el propio sensor o en un fichero
externo (File).
Capítulo 4: Diseño de Detalle 100
• Cargar una configuración desde el propio sensor o desde un fichero externo (File).
• Visualización en tiempo real de la medida que va realizando el sensor.
Por otro lado, es posible la adquisición de datos de forma analógica, para lo que el sensor dispone de dos tipos de lazos de control: de corriente y de voltaje. Este parámetro, que no nos va a afectar, se puede cambiar en el software mediante el comando Mode. Si los datos se guardan en un fichero .log, aparecerán distribuidos en dos columnas: tiempo, expresado en horas: minutos: segundos, y posición, expresada en pulgadas y con una precisión de centésimas (por ejemplo: 34,67). Para poder usar estos datos y hacer representaciones en Matlab, hay que realizar previamente una serie de pasos:
1) Abrir fichero .log con WordPad 2) Remplazar “ : “ por “ “ 3) Remplazar “ , “ por “ . “ 4) Guardar cambios 5) Abrir Matlab y cambiar el directorio de trabajo 6) Cargar el fichero: load datos.log -ASCII 7) Pasar a segundos el tiempo: segundos= (datos (:,1)*3600 + datos(:,2)*60 + datos(:,3)); 8) Representar:
plot(segundos, datos(:,4))
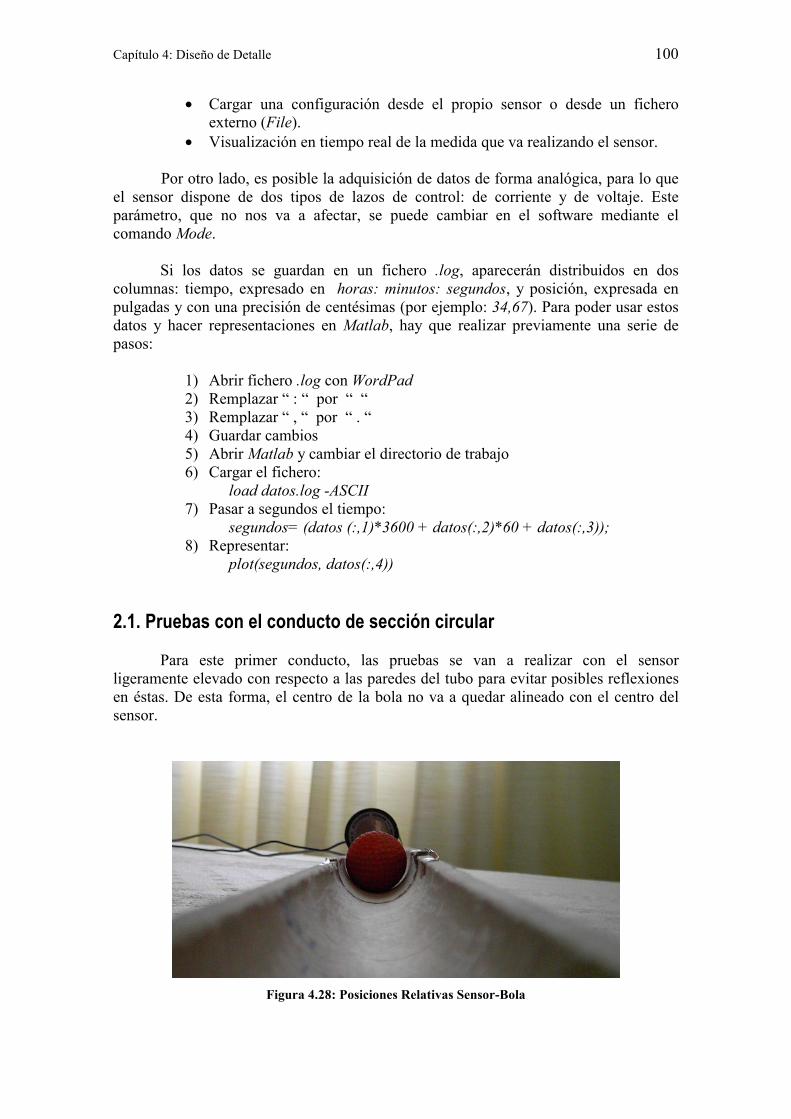
2.1. Pruebas con el conducto de sección circular Para este primer conducto, las pruebas se van a realizar con el sensor ligeramente elevado con respecto a las paredes del tubo para evitar posibles reflexiones en éstas. De esta forma, el centro de la bola no va a quedar alineado con el centro del sensor.
Figura 4.28: Posiciones Relativas Sensor-Bola
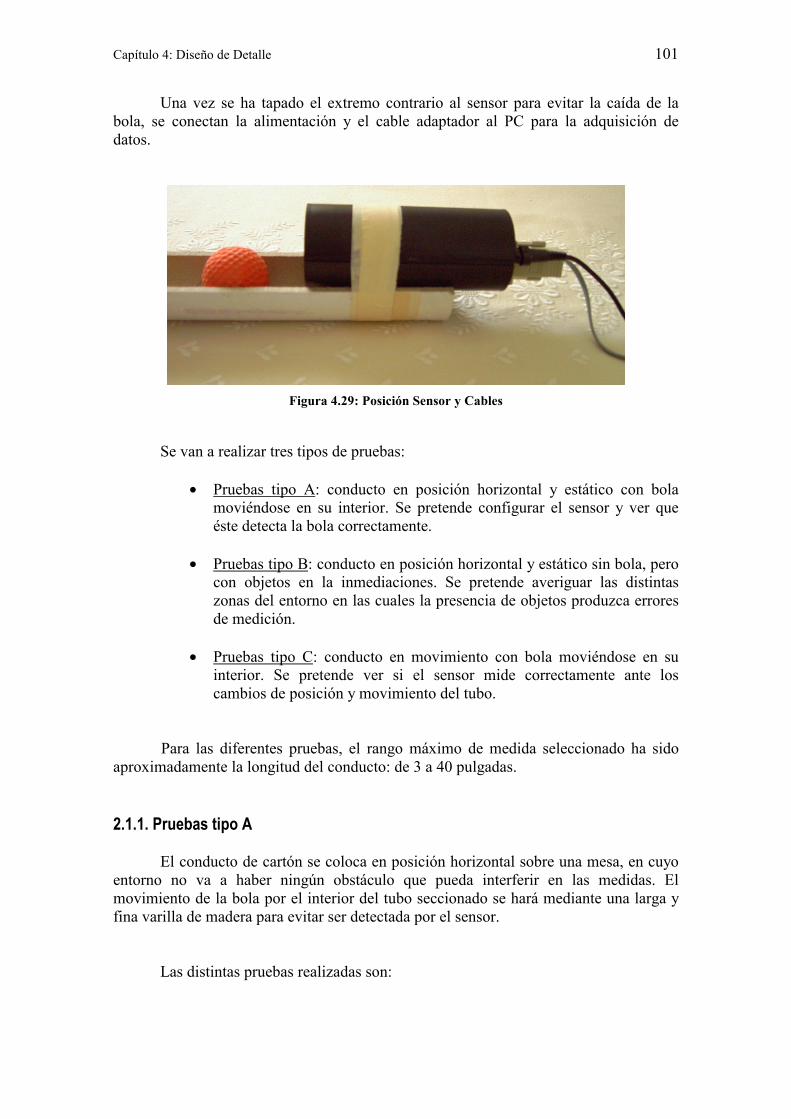
Capítulo 4: Diseño de Detalle 101
Una vez se ha tapado el extremo contrario al sensor para evitar la caída de la bola, se conectan la alimentación y el cable adaptador al PC para la adquisición de datos.
Figura 4.29: Posición Sensor y Cables
Se van a realizar tres tipos de pruebas:
• Pruebas tipo A: conducto en posición horizontal y estático con bola moviéndose en su interior. Se pretende configurar el sensor y ver que éste detecta la bola correctamente.
• Pruebas tipo B: conducto en posición horizontal y estático sin bola, pero
con objetos en la inmediaciones. Se pretende averiguar las distintas zonas del entorno en las cuales la presencia de objetos produzca errores de medición.
• Pruebas tipo C: conducto en movimiento con bola moviéndose en su
interior. Se pretende ver si el sensor mide correctamente ante los cambios de posición y movimiento del tubo.
Para las diferentes pruebas, el rango máximo de medida seleccionado ha sido aproximadamente la longitud del conducto: de 3 a 40 pulgadas. 2.1.1. Pruebas tipo A El conducto de cartón se coloca en posición horizontal sobre una mesa, en cuyo entorno no va a haber ningún obstáculo que pueda interferir en las medidas. El movimiento de la bola por el interior del tubo seccionado se hará mediante una larga y fina varilla de madera para evitar ser detectada por el sensor. Las distintas pruebas realizadas son:
Capítulo 4: Diseño de Detalle 102
Prueba Rango (pulgadas) Nº Pulsos Intervalo
(ms) Nº
Medidas Bola Obstáculos
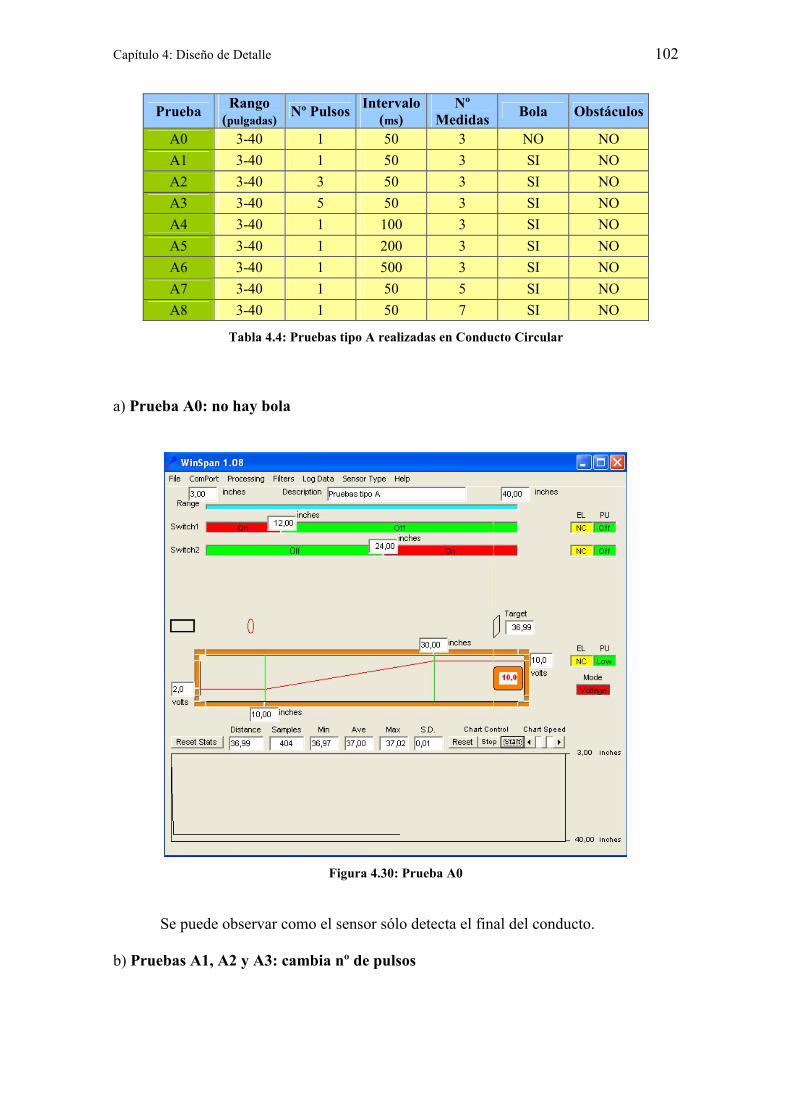
A0 3-40 1 50 3 NO NO A1 3-40 1 50 3 SI NO A2 3-40 3 50 3 SI NO A3 3-40 5 50 3 SI NO A4 3-40 1 100 3 SI NO A5 3-40 1 200 3 SI NO A6 3-40 1 500 3 SI NO A7 3-40 1 50 5 SI NO A8 3-40 1 50 7 SI NO
Tabla 4.4: Pruebas tipo A realizadas en Conducto Circular
a) Prueba A0: no hay bola
Figura 4.30: Prueba A0
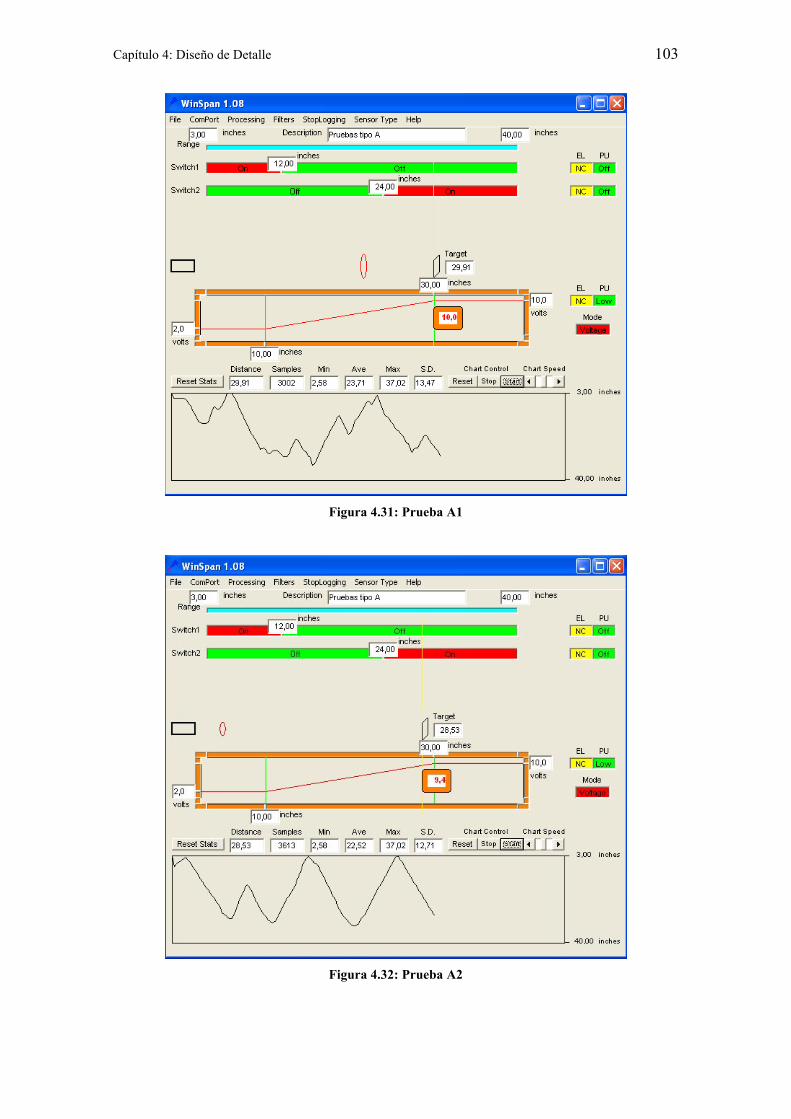
Se puede observar como el sensor sólo detecta el final del conducto. b) Pruebas A1, A2 y A3: cambia nº de pulsos
Capítulo 4: Diseño de Detalle 103
Figura 4.31: Prueba A1
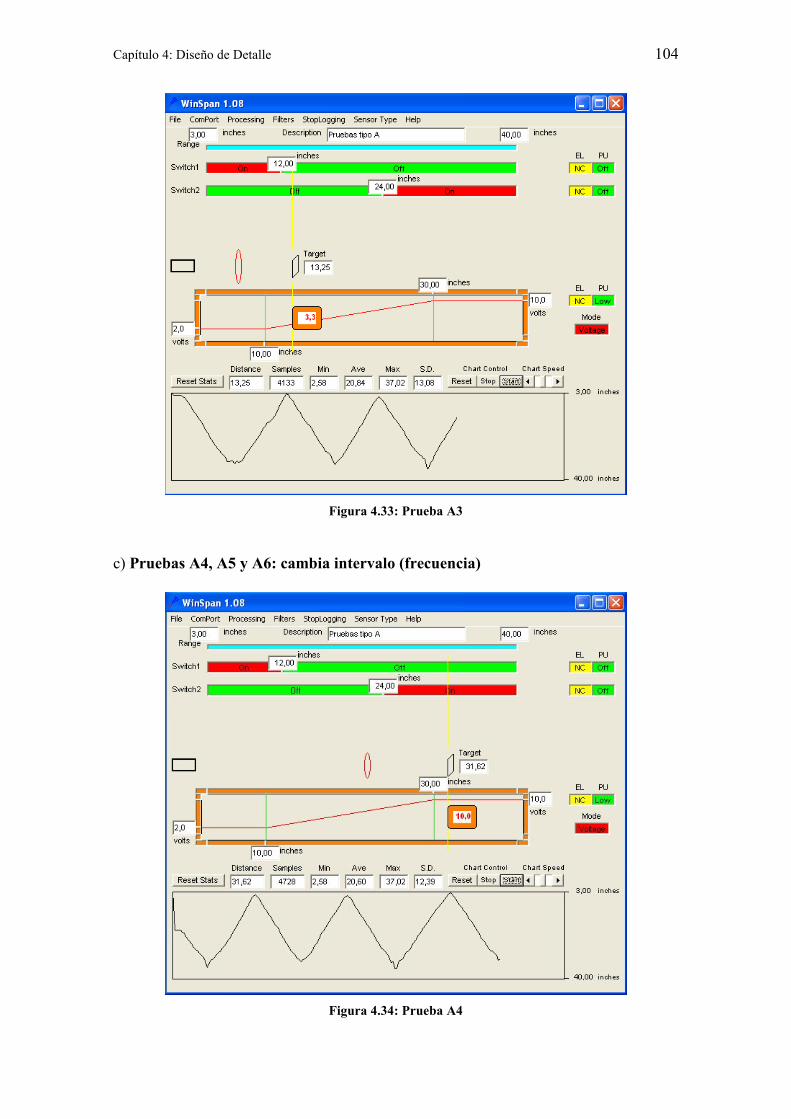
Figura 4.32: Prueba A2
Capítulo 4: Diseño de Detalle 104
Figura 4.33: Prueba A3
c) Pruebas A4, A5 y A6: cambia intervalo (frecuencia)
Figura 4.34: Prueba A4
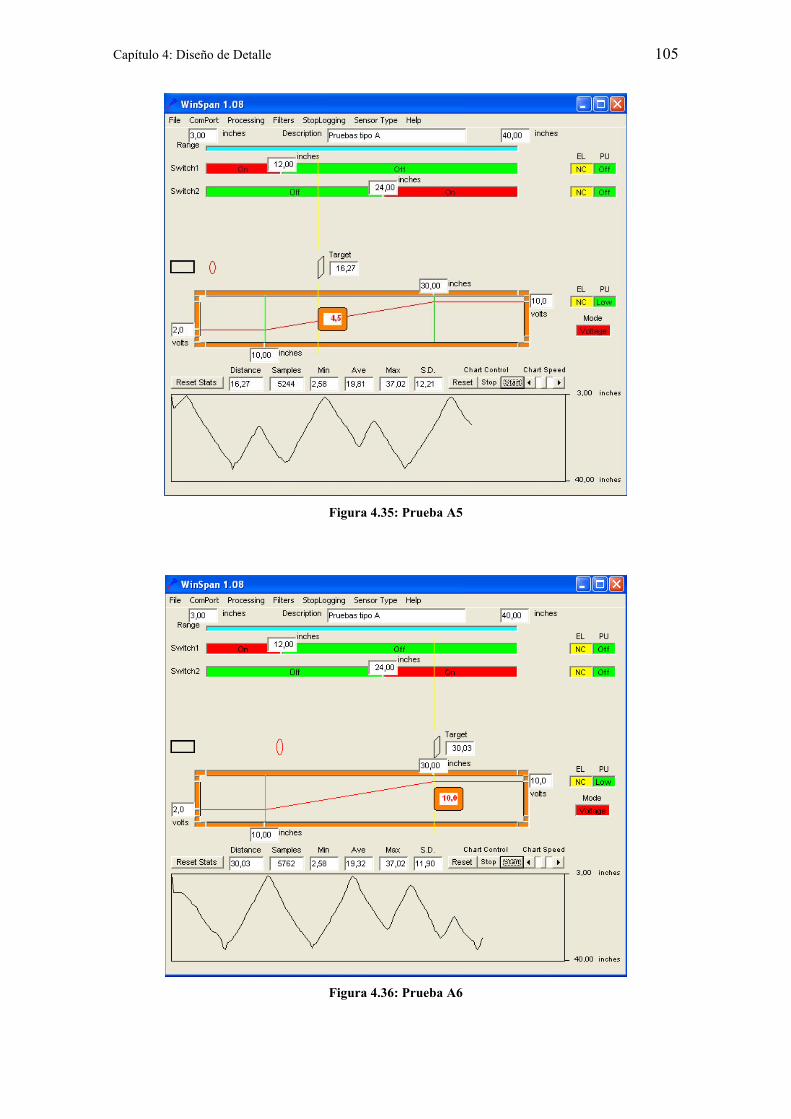
Capítulo 4: Diseño de Detalle 105
Figura 4.35: Prueba A5
Figura 4.36: Prueba A6
Capítulo 4: Diseño de Detalle 106
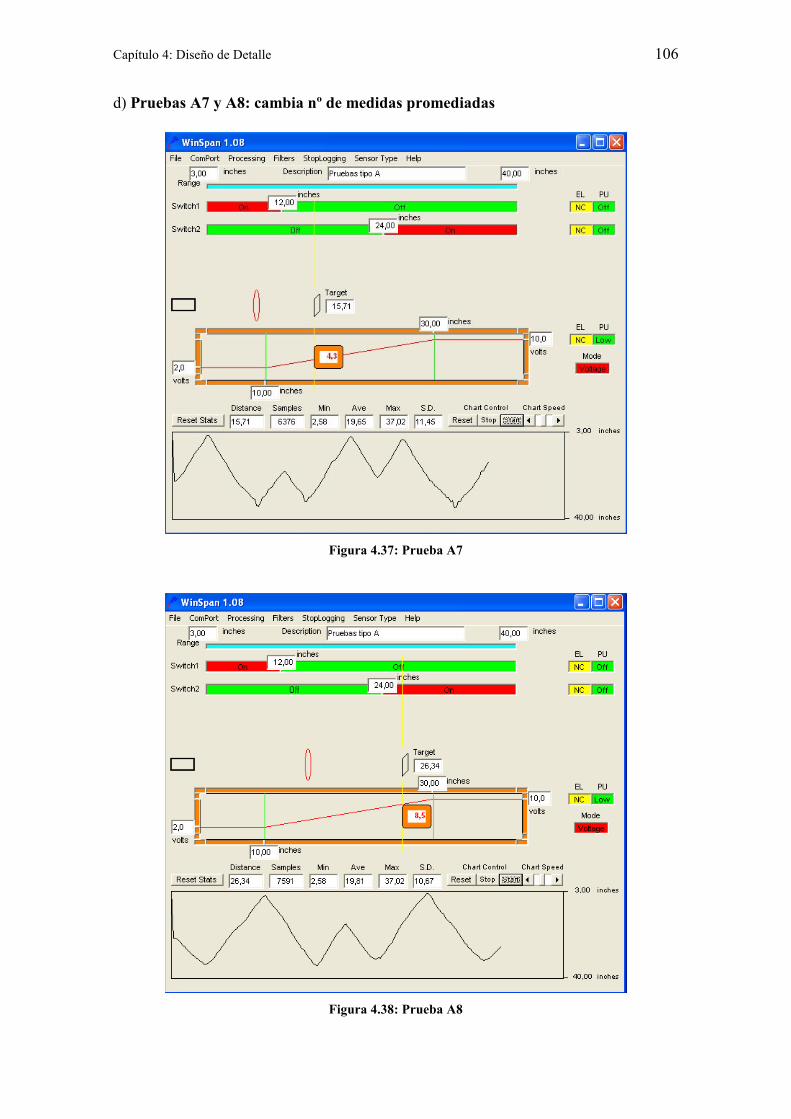
d) Pruebas A7 y A8: cambia nº de medidas promediadas
Figura 4.37: Prueba A7
Figura 4.38: Prueba A8
Capítulo 4: Diseño de Detalle 107
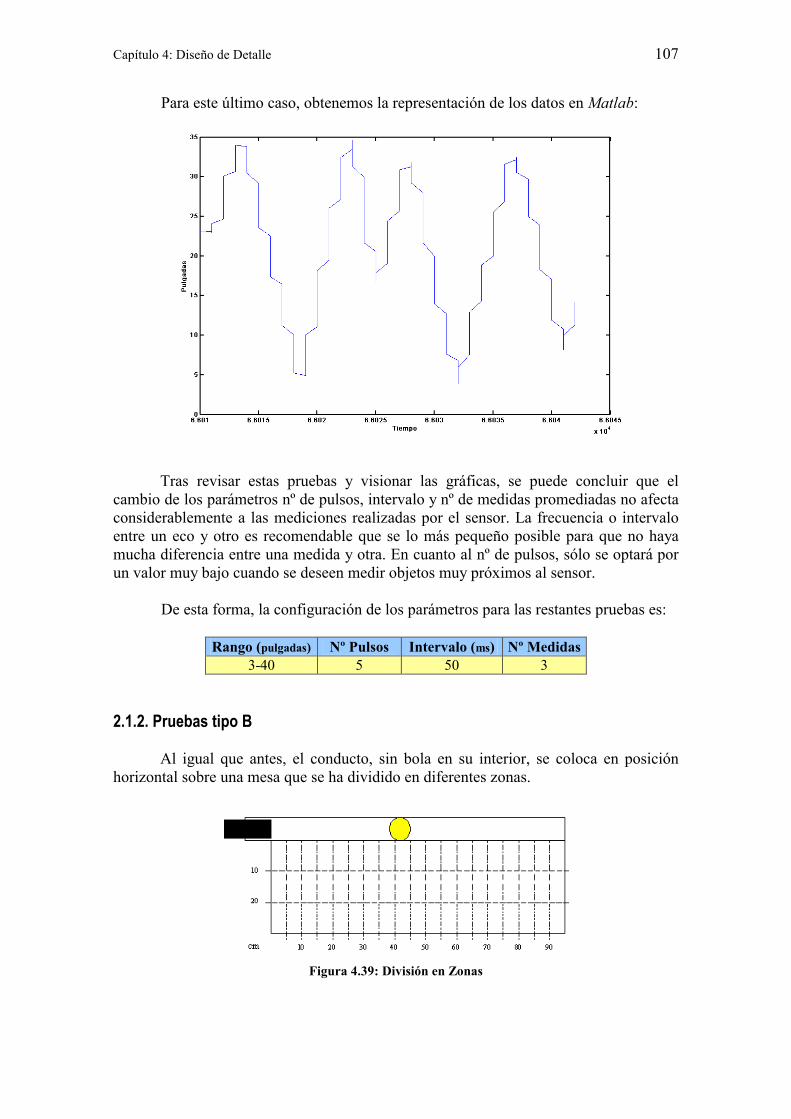
Para este último caso, obtenemos la representación de los datos en Matlab:
Tras revisar estas pruebas y visionar las gráficas, se puede concluir que el cambio de los parámetros nº de pulsos, intervalo y nº de medidas promediadas no afecta considerablemente a las mediciones realizadas por el sensor. La frecuencia o intervalo entre un eco y otro es recomendable que se lo más pequeño posible para que no haya mucha diferencia entre una medida y otra. En cuanto al nº de pulsos, sólo se optará por un valor muy bajo cuando se deseen medir objetos muy próximos al sensor.
De esta forma, la configuración de los parámetros para las restantes pruebas es:
Rango (pulgadas) Nº Pulsos Intervalo (ms) Nº Medidas 3-40 5 50 3
2.1.2. Pruebas tipo B Al igual que antes, el conducto, sin bola en su interior, se coloca en posición horizontal sobre una mesa que se ha dividido en diferentes zonas.
Figura 4.39: División en Zonas
Capítulo 4: Diseño de Detalle 108
Lo que se va a hacer es ir colocando de forma seguida un mismo obstáculo en cada una de las diferentes áreas que componen una fila para ver si es detectado o no por el sensor. Las distintas pruebas realizadas son: Áreas (cm) 0-5 5-
10 10-15
15-20
20-25
25-30
30-35
35-40
40-45
45-50
50-55
55-60
60-65
65-70
70-75
75-80
80-85
85-90
90-95
0-10 B 1.1
B 1.2
B 1.3
B 1.4
B 1.5
B 1.6
B 1.7
B 1.8
B 1.9
B 1.10
B 1.11
B 1.12
B 1.13
B 1.14
B 1.15
B 1.16
B 1.17
B 1.18
B 1.19
10-20 B 2.1
B 2.2
B 2.3
B 2.4
B 2.5
B 2.6
B 2.7
B 2.8
B 2.9
B 2.10
B 2.11
B 2.12
B 2.13
B 2.14
B 2.15
B 2.16
B 2.17
B 2.18
B 2.19
20-30 B 3.1
B 3.2
B 3.3
B 3.4
B 3.5
B 3.6
B 3.7
B 3.8
B 3.9
B 3.10
B 3.11
B 3.12
B 3.13
B 3.14
B 3.15
B 3.16
B 3.17
B 3.18
B 3.19
Tabla 4.5: Pruebas tipo B realizadas en Conducto Circular
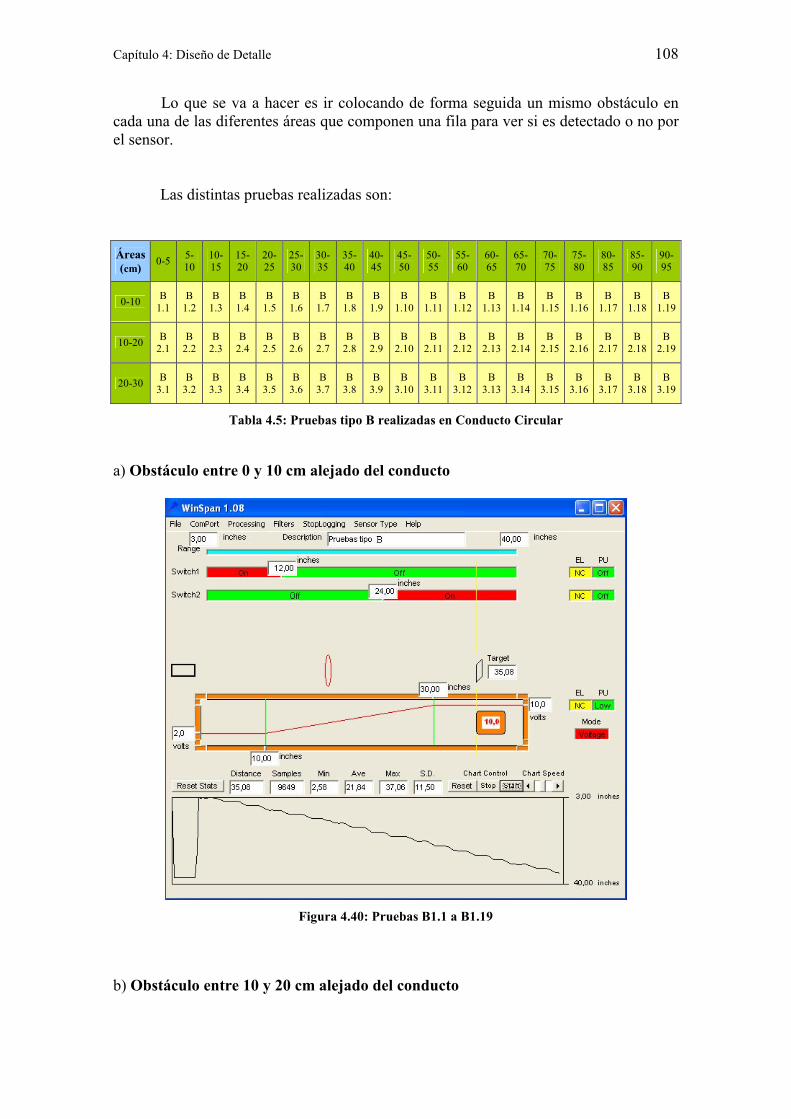
a) Obstáculo entre 0 y 10 cm alejado del conducto
Figura 4.40: Pruebas B1.1 a B1.19
b) Obstáculo entre 10 y 20 cm alejado del conducto
Capítulo 4: Diseño de Detalle 109
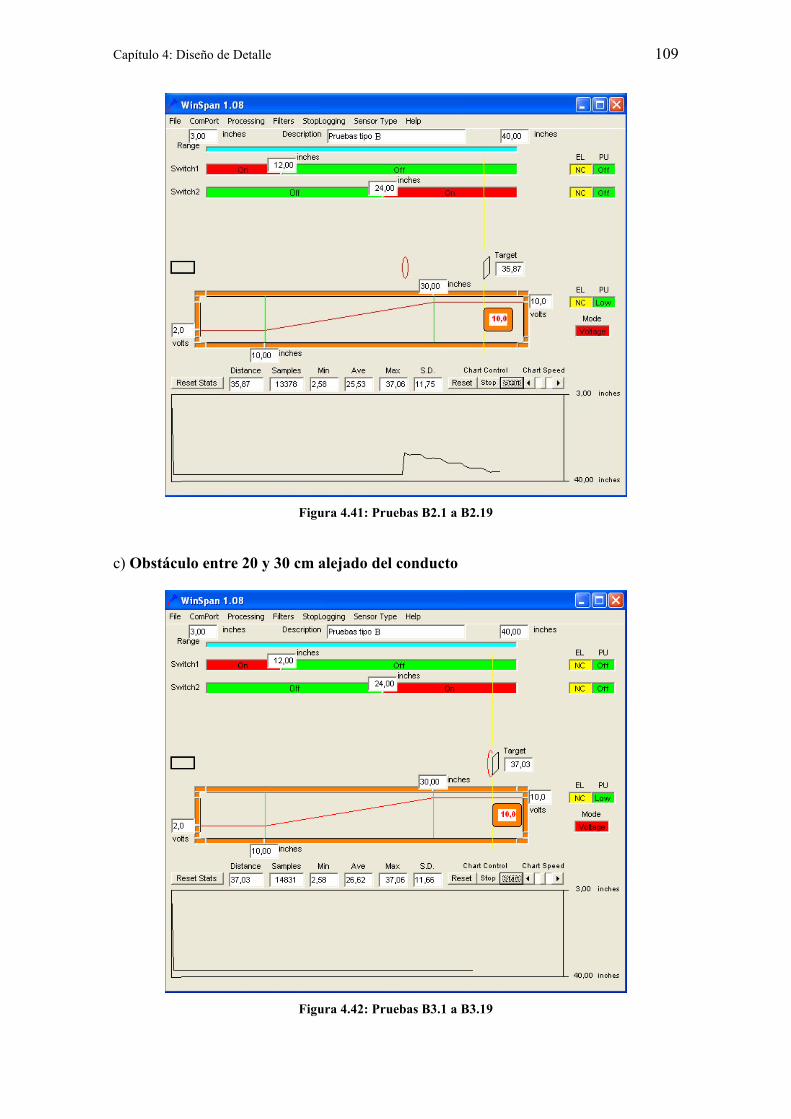
Figura 4.41: Pruebas B2.1 a B2.19
c) Obstáculo entre 20 y 30 cm alejado del conducto
Figura 4.42: Pruebas B3.1 a B3.19
Capítulo 4: Diseño de Detalle 110
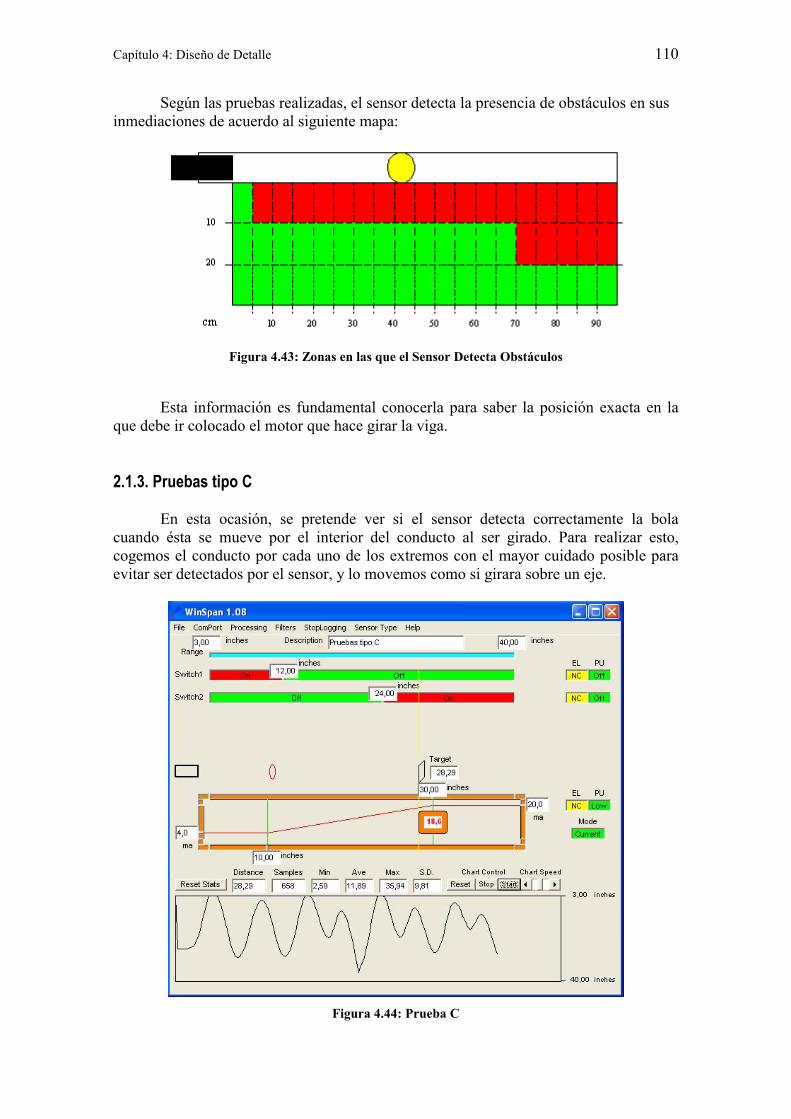
Según las pruebas realizadas, el sensor detecta la presencia de obstáculos en sus inmediaciones de acuerdo al siguiente mapa:
Figura 4.43: Zonas en las que el Sensor Detecta Obstáculos
Esta información es fundamental conocerla para saber la posición exacta en la que debe ir colocado el motor que hace girar la viga. 2.1.3. Pruebas tipo C En esta ocasión, se pretende ver si el sensor detecta correctamente la bola cuando ésta se mueve por el interior del conducto al ser girado. Para realizar esto, cogemos el conducto por cada uno de los extremos con el mayor cuidado posible para evitar ser detectados por el sensor, y lo movemos como si girara sobre un eje.
Figura 4.44: Prueba C
Capítulo 4: Diseño de Detalle 111
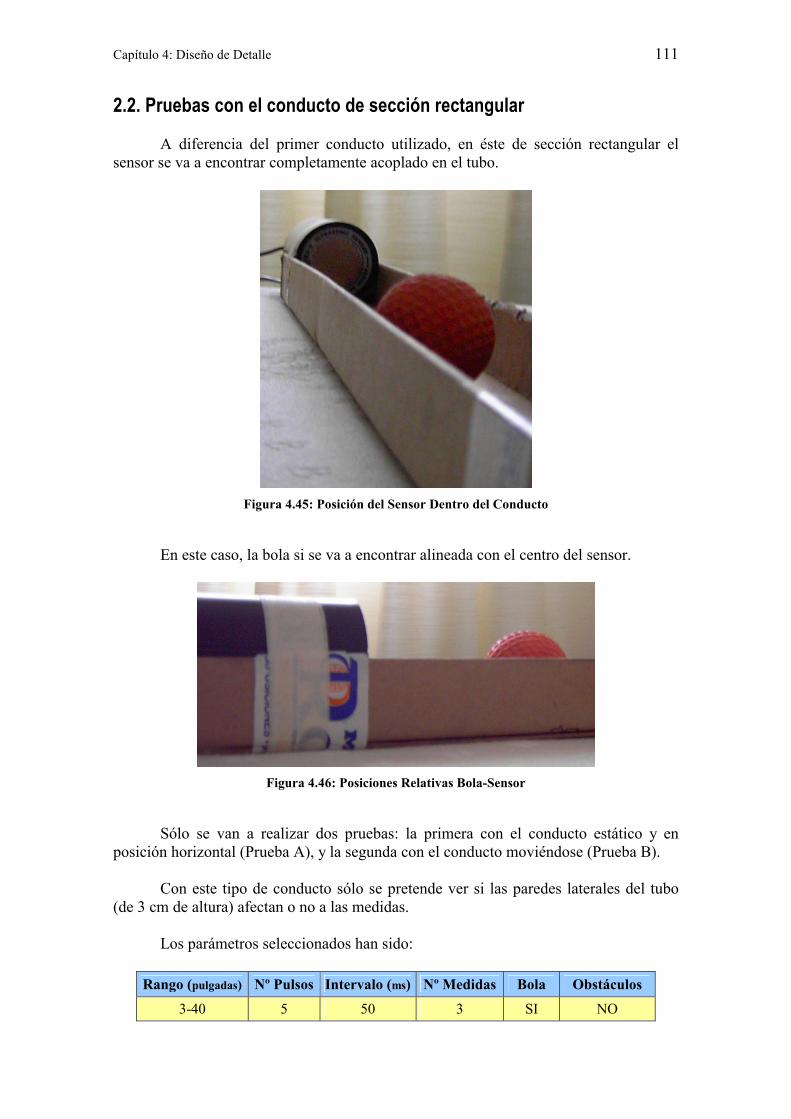
2.2. Pruebas con el conducto de sección rectangular A diferencia del primer conducto utilizado, en éste de sección rectangular el sensor se va a encontrar completamente acoplado en el tubo.
Figura 4.45: Posición del Sensor Dentro del Conducto
En este caso, la bola si se va a encontrar alineada con el centro del sensor.
Figura 4.46: Posiciones Relativas Bola-Sensor
Sólo se van a realizar dos pruebas: la primera con el conducto estático y en posición horizontal (Prueba A), y la segunda con el conducto moviéndose (Prueba B). Con este tipo de conducto sólo se pretende ver si las paredes laterales del tubo (de 3 cm de altura) afectan o no a las medidas. Los parámetros seleccionados han sido:
Rango (pulgadas) Nº Pulsos Intervalo (ms) Nº Medidas Bola Obstáculos 3-40 5 50 3 SI NO
Capítulo 4: Diseño de Detalle 112
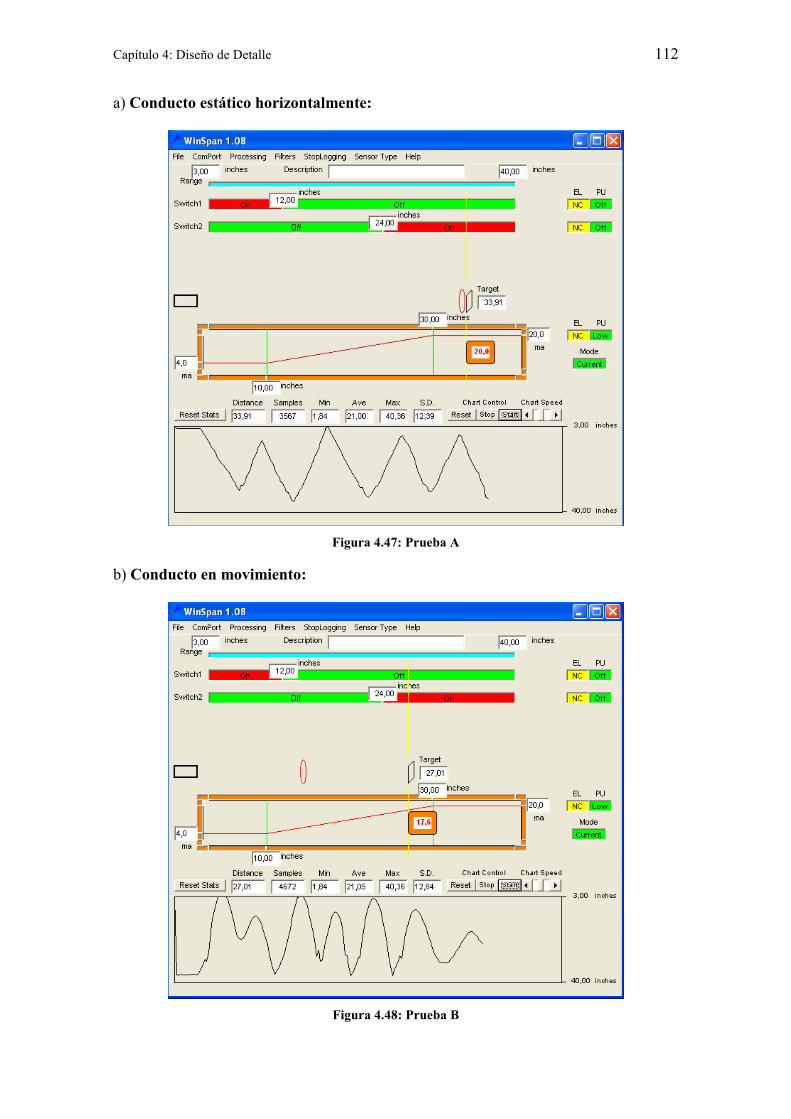
a) Conducto estático horizontalmente:
Figura 4.47: Prueba A
b) Conducto en movimiento:
Figura 4.48: Prueba B
Capítulo 4: Diseño de Detalle 113
Las incidencias principales detectadas con respecto al conducto de sección circular es que la evolución y toma de datos es más lenta debido a que las ondas chocan más. Por otro lado, se observan trazos más irregulares y discontinuos en las gráficas.
Una vez obtenidas todas las representaciones gráficas de la señal del sensor, y como conclusión a estas pruebas realizadas, cabe destacar dos aspectos importantes: en primer lugar, el correcto funcionamiento del sensor a la hora de detectar la presencia de la bola u otros objetos en la viga e inmediaciones y el posterior envío de esa información al puerto serie. Y en segundo lugar, y aunque los resultados presentados son satisfactorios a simple vista, hay que mencionar que hemos encontrado muchas dificultades durante el proceso de medición para obtener una señal limpia, sobre todo en el caso de la viga en movimiento. Esto se ha debido sobre todo a la reflexión de las ondas ultrasónicas con las paredes de los conductos y con nosotros mismos. Por ello, y antes de invertir tiempo y dinero en un mecanismo que finalmente no valga, se hace necesario realizar otro estudio con el sensor pero esta vez en unas condiciones más idóneas y seguras en lo referente al mecanismo y al procedimiento de trabajo. Se decide por tanto fabricar un prototipo con el que experimentar estas cuestiones y de camino validar otros requerimientos del sistema. Este estudio se desarrolla en el siguiente capítulo.
Recommended

















