cenidet
Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingeniería Mecánica
TESIS DE MAESTRÍA EN CIENCIAS
Arreglo de Pesos Modales para el Balanceo de Rotores Asimétricos
presentada por
Javier Molina González Ing. Electromecánico por el Tecnológico de Estudios Superiores de Jocotitlán
como requisito para la obtención del grado de: Maestría en Ciencias en Ingeniería Mecánica
Director de tesis: Dr. Jorge Colín Ocampo
Co-Director de tesis:
Dr. Enrique Simón Gutiérrez Wing
Cuernavaca, Morelos, México. 13 de Febrero de 2009

cenidet
Centro Nacional de Investigación y Desarrollo Tecnológico
Departamento de Ingeniería Mecánica
TESIS DE MAESTRÍA EN CIENCIAS
Arreglo de Pesos Modales para el Balanceo de Rotores Asimétricos
presentada por
Javier Molina González Ing. Electromecánico por el Tecnológico de Estudios Superiores de Jocotitlán
como requisito para la obtención del grado de:
Maestría en Ciencias en Ingeniería Mecánica
Director de tesis: Dr. Jorge Colín Ocampo
Co-Director de tesis:
Dr. Enrique Simón Gutiérrez Wing
Jurado: Dr. Jorge Bedolla Hernández – Presidente M.C. Eladio Martínez Rayón – Secretario
Dr. Jorge Enrique Aguirre Romano – Vocal Dr. Jorge Colín Ocampo – Vocal Suplente
Cuernavaca, Morelos, México. 13 de Febrero de 2009

DEDICATORIAS
A MIS QUERIDOS PADRES RICARDO Y RAMIRA Les dedico este gran logro, por ser los mejores padres y porque de ustedes aprendí a ser de lucha.
Gracias por su amor incondicional, por su gran ejemplo, por la confianza que han depositado en mí
y por estar siempre listos para compartir mis pensamientos. Los amo infinitamente.
A MI HERMOSA ESPOSA ALEJANDRA Por estar a mi lado y apoyarme en todo momento. Gracias por el amor y cariño con los que llenas
cada instante de mi vida. Eres lo más hermoso y valioso de mi existencia. Te amo por sobre
todas las cosas.
A MI HERMOSO HIJO JAVIER EMILIANO Para mi bebé, porque desde que llegaste me has regalado los momentos más maravillosos de mi vida y por
que eres el motivo de mi existencia. Eres lo más hermoso y valioso de mi vida. Te amo por sobre todas
las cosas. A MI QUERIDO HERMANO RICARDO
Por ser el mejor hermano que pueda existir. Gracias por tu apoyo, confianza y cariño. Te amo. A LA FAMILIA RODRIGUEZ RAMIREZ
Por su ejemplo de amor y unidad. Gracias por el apoyo que siempre me han brindado. Los quiero mucho.
PARA TI HERMANITA…DONDE QUIERA QUE ESTES

AGRADECIMIENTOS
A DIOS .… por todo lo que me ha dado
Al Consejo Nacional de Ciencia y Tecnología (CONACYT) y a la Secretaría de Educación Pública (SEP) por
el apoyo económico brindado durante la realización de mis estudios de maestría.
Al Centro Nacional de Investigación y Desarrollo Tecnológico (CENIDET) por darme el apoyo para lograr una
meta más en mi formación profesional.
A mi asesor el Dr. Jorge Colín Ocampo por sus valiosas enseñanzas y consejos, pero sobre todo por
permitirme ser su amigo.
Al Dr. Enrique Simón Gutiérrez Wing por todo el apoyo brindado y especialmente por su amistad.
A los miembros del jurado revisor: Dr. Jorge Bedolla Hernández, M.C. Eladio Martínez Rayón y al Dr. Jorge
Enrique Aguirre Romano por su contribución y experiencia en la realización de este trabajo.
Al Dr. Dariusz Szwedowicz Wasik y la M. C. Claudia Cortés García por todo el apoyo brindado.
A mis compañeros y grandes amigos: Darío Tovar Chora, Moisés Espinoza Rodríguez, Ma.
Guadalupe Guzmán Campero Calderón, Iván Medina Agreda, Felipe Díaz, José R. Alejandre
Sepúlveda, por permitirme disfrutar de una amistad sincera.
Un agradecimiento especial al Ing. Guillermo Ortiz Ceballos, M.C. Guadalupe Vélez, M.C. Juan
Manuel Arzola Castro y al M.C. Pedro Cruz Alcantar.
A mis grandes amigos de Industrias Unidas (IUSA) que de una u otra manera siempre me han
brindado su apoyo.
A todos ustedes
GRACIAS

CONTENIDO
CONTENIDO i LISTA DE FIGURAS iii LISTA DE TABLAS v NOMENCLATURA vii RESUMEN x CAPITULO 1. INTRODUCCION 1.1 Antecedentes 1 1.2 Descripción del problema y objetivo 4 1.3 Organización de la tesis 5 CAPITULO 2. REVISION BIBLIOGRAFICA 2.1 Revisión bibliográfica 7 CAPITULO 3. CARACTERISTICAS DE LOS ELEMENTOS DE UN ROTOR 3.1 Elementos de un rotor 13 3.1.1 Discos 14 3.1.2 Flecha 16 3.1.3 Soportes 18 3.1.4 Masa de desbalance 19 CAPITULO 4. METODOS DE BALANCEO 4.1 Método de balanceo modal 20 4.2 Método de coeficientes de influencia 27 4.3 Balanceo modal utilizando coeficientes de influencia 29 CAPITULO 5. MODELO MATEMATICO DE UN SISTEMA ROTOR-SOPORTES
5.1 Introducción 32 5.2 Modelo de un sistema rotor-soportes con flecha de sección transversal
simétrica 33
5.2.1 Elementos finitos del sistema 33 5.2.1.1 Flecha 33 5.2.1.2 Disco 38 5.2.1.3 Soportes 38 5.2.1.4 Masa de desbalance 39 5.2.2 Solución de la ecuación de movimiento del sistema 40

5.2.2.1 Frecuencias naturales y formas modales 40 5.2.2.2 Respuesta al desbalance 41
5.3 Modelo de un sistema rotor-soportes con flecha de sección transversal asimétrica
42
5.3.1 Sistema de coordenadas generalizadas 42 5.3.2 Energía cinética 43 5.3.3 Rigidez de la flecha 44
5.3.4 Solución de la ecuación de movimiento del sistema 47 5.3.4.1 Frecuencias naturales y formas modales 47 5.3.4.2 Respuesta al desbalance 47
5.3.5 Amortiguamiento 48 CAPITULO 6. SIMULACION NUMERICA 50 6.1 Estructura general de los modelos 50 6.2 Rotor simétrico 51 6.2.1 Formas modales y diagrama de Campbell 52 6.2.2 Respuesta al desbalance 54 6.3 Rotor asimétrico 56 6.3.1 Formas modales y diagrama de Campbell 57 6.3.2 Respuesta al desbalance 60 CAPITULO 7. COMPORTAMIENTO DINAMICO DE LOS ROTORES ASIMETRICOS
7.1 Características del comportamiento dinámico de los rotores asimétricos 65 7.1.1 Características generales 65 7.1.2 Evolución de los diagramas polares de respuesta en función de
la posición angular de la fuerza de excitación 67
7.1.3 Descomposición de la fuerza de excitación en los ejes orientados a
72
CAPITULO 8. METODO DE BALANCEO PROPUESTO 8.1 Introducción 75 8.2 Método de balanceo propuesto 75 8.3 Balanceo de un rotor asimétrico 78
8.3.1 Caso 1 79 8.3.2 Caso 2 93 CAPITULO 9. CONCLUSIONES Y RECOMENDACIONES 9.1 Conclusiones 1049.2 Recomendaciones 106
REFERENCIAS BIBLIOGRAFICAS 107

LISTA DE FIGURAS
Figura Descripción Página
3.1 Elementos de un rotor. 13 3.2 Marcos de referencia del disco sobre una flecha girando. 14 3.3 Sistema coordenado de la viga. 16 3.4 Sistema de fuerzas de los soportes. 18 3.5 Masa de desbalance. 19 4.1 Viga simplemente apoyada en sus extremos. 20 4.2 Frecuencias naturales y modos de vibración de una viga
simplemente apoyada. 21
4.3 Diagrama de Bode de amplitud. 22 4.4 Sistemas de referencia de la flecha. 23 4.5 Posición angular de la masa colocada sobre el rotor. 24 5.1 Elemento finito de la flecha. 34 5.2 Modelo de un rotor asimétrico. 42 5.3 Restricciones de la sección asimétrica. 44 5.4 Sección transversal asimétrica. 45 5.5 Fracción de amortiguamiento critico contra frecuencia para
amortiguamiento de Rayleigh. 49
6.1 Modelo del rotor simétrico. 51 6.2 Primeros dos pares de formas modales. 52 6.3 Diagrama de Campbell del rotor simétrico simulado. 53 6.4 Respuesta al desbalance del rotor simulado. 55 6.5 Configuración del rotor asimétrico. 56 6.6 Formas modales del rotor asimétrico. 58 6.7 Diagrama de Campbell del rotor asimétrico. 58 6.8 Fracción de amortiguamiento crítico contra velocidad de rotación. 60 6.9 Diagramas de Bode de amplitud correspondientes a la primera
velocidad crítica. 61
6.10 Diagramas polares de respuesta correspondientes a la primera velocidad crítica. 62
6.11 Diagramas polares de respuesta correspondientes a la segunda velocidad crítica. 62
6.12 Diagramas de Bode de amplitud correspondientes a la primera velocidad crítica. 63
6.13 Diagramas polares de respuesta correspondientes a la primera velocidad critica. 63
6.14 Diagramas polares de respuesta correspondientes a la segunda velocidad crítica. 64
7.1 Diagramas polares característicos de un rotor asimétrico. 65 7.2 Forma geométrica de los diagramas polares de acuerdo a la
relación . 66
7.3 Diagramas polares de respuesta con la fuerza de excitación en los intervalos de 315° a 0° y 135° a 180°, el eje de rigidez máxima de la flecha y la posición del transductor coinciden con la línea de cero grados del diagrama.
68

7.4 Diagramas polares de respuesta con la fuerza de excitación en los intervalos de 0° a 45° y 180° a 225°, el eje de rigidez máxima de la flecha y la posición del transductor coinciden con la línea de cero grados del diagrama.
69
7.5 Diagramas polares de respuesta con la fuerza de excitación en los intervalos de 0° a 45° y 180° a 225°, el eje de rigidez máxima de la flecha y la posición del transductor coinciden con la línea de cero grados del diagrama.
70
7.6 Diagramas polares de respuesta con la fuerza de excitación en los intervalos de 90° a 135° y 270° a 315°, el eje de rigidez máxima de la flecha y la posición del transductor coinciden con la línea de cero grados del diagrama.
71
7.7 Diagrama polar de respuesta generado por el desbalance , el eje de rigidez máxima de la flecha y la posición del transductor coinciden con la línea de cero grados del diagrama.
72
7.8 Descomposición del vector desbalance respecto a los ejes orientados a . 73
7.9 Diagramas polares de respuesta generados por el desbalance y las componentes de desbalance y , el eje de rigidez máxima de la flecha y la posición del transductor coinciden con la línea de cero grados del diagrama.
73
8.1 Sistema coordenado de los ejes y . 77 8.2 Descomposición del vector sobre los ejes E y H. 77 8.3 Descomposición del vector sobre los ejes E y H. 77 8.4 Configuración del rotor asimétrico. 79 8.5 Diagrama polar de respuesta, transductor 1, dirección X. 80 8.6 Diagrama polar de respuesta, transductor 2, dirección X. 81 8.7 Diagrama polar de respuesta, transductor 1, dirección X. 83 8.8 Diagrama polar de respuesta, transductor 2, dirección X. 84 8.9 Diagrama polar de respuesta, transductor 1, dirección X. 87 8.10 Diagrama polar de respuesta, transductor 2, dirección X. 88 8.11 Diagramas de respuesta, transductor 1, dirección X.
a) Diagrama de Bode de amplitud, b) Diagrama Polar de respuesta. 90
8.12 Diagramas de respuesta, transductor 2, dirección X. Diagrama de Bode de amplitud, b) Diagrama Polar de respuesta. 91
8.13 Configuración del rotor asimétrico. 93 8.14 Diagrama polar de respuesta, transductor 1, dirección X. 94 8.15 Diagrama polar de respuesta, transductor 2, dirección X. 95 8.16 Diagrama polar de respuesta, transductor 1, dirección X. 97 8.17 Diagrama polar de respuesta, transductor 2, dirección X. 97 8.18 Diagramas de respuesta, transductor 1, dirección X.
Diagrama de Bode de amplitud, b) Diagrama Polar de respuesta. 101
8.19 Diagramas de respuesta, transductor 2, dirección X. Diagrama de Bode de amplitud, b) Diagrama Polar de respuesta. 102

LISTA DE TABLAS
Tabla Descripción Página
6.1 Características del rotor simétrico. 51 6.2 Frecuencias naturales en Hertz a 25,000 rpm. 54 6.3 Velocidades criticas y desplazamientos del rotor simétrico. 55 6.4 Características del rotor asimétrico. 57 6.5 Velocidades criticas del rotor asimétrico sin considerar
amortiguamiento. 59
6.6 Parámetros del espectro de amortiguamiento proporcional. 60 8.1 Características del rotor asimétrico. 79 8.2 Parámetros del amortiguamiento. 80 8.3 Desbalance inicial. 80 8.4 Vectores de vibración iníciales. 81 8.5 Posición angular de la fuerza de desbalance. 82 8.6 Factores de forma modal. 82 8.7 Pesos de prueba. 83 8.8 Arreglo de pesos modales de prueba. 83 8.9 Vibración residual posterior a la colocación del arreglo de pesos
modales. 84
8.10 Componentes de los vectores de vibración iníciales sobre los ejes y . 85
8.11 Componentes de los pesos sobre los ejes y . 85 8.12 Componentes de los vectores de vibración residuales sobre los ejes
y . 85
8.13 Componentes de los vectores efecto sobre los ejes y . 86 8.14 Matriz de coeficientes de influencia sobre los ejes y . 86 8.15 Componentes de los pesos de corrección sobre los ejes y . 86 8.16 Pesos de corrección. 87 8.17 Arreglo de pesos modales de corrección. 87 8.18 Vibración residual posterior a la colocación del arreglo de pesos
modales. 88
8.19 Reducciones de las vibraciones iníciales. 88 8.20 Pesos de balanceo. 89 8.21 Arreglo de pesos modales de balanceo. 89 8.22 Arreglo de pesos modales de balanceo. 89 8.23 Vectores de vibración residual finales. 92 8.24 Reducciones de las vibraciones iníciales. 92 8.25 Características del rotor asimétrico. 93 8.26 Parámetros del amortiguamiento. 94 8.27 Desbalance inicial. 94 8.28 Vectores de vibración iníciales. 95 8.29 Posición angular de la fuerza de desbalance. 96 8.30 Factores de forma modal. 96 8.31 Pesos de balanceo para el primero y segundo modo. 96 8.32 Arreglo de pesos modales de prueba. 96

8.33 Vibración residual posterior a la colocación del arreglo de pesos modales de prueba. 98
8.34 Componentes de los vectores de vibración iníciales sobre los ejes y . 98
8.35 Componentes de los pesos sobre los ejes y . 98 8.36 Componentes de los vectores de vibración residuales sobre los ejes
y . 99
8.37 Componentes de los vectores efecto sobre los ejes y . 99 8.38 Matriz de coeficientes de influencia sobre los ejes y . 99 8.39 Componentes de los pesos de corrección sobre los ejes y . 100 8.40 Pesos para el primero y segundo modo. 100 8.41 Arreglo de pesos modales. 100 8.42 Vibración residual posterior a la colocación del arreglo de pesos
modales. 103
8.43 Reducciones de las vibraciones iníciales. 103

NOMENCLATURA
La siguiente nomenclatura aplica en toda la tesis, excepto la que se indique en el texto.
Símbolo Descripción
Efecto cortante producido sobre la flecha. Desplazamiento del centro de masa respecto al centro geométrico
de la flecha. Componentes de excentricidad del centro de masa de la flecha en la
direcciones . Componentes de excentricidad del centro de masa de la flecha en la
direcciones . Soportes, con propiedades de rigidez y/o amortiguamiento.
Punto arbitrario sobre la sección transversal de la flecha. Constante de amortiguamiento de los soportes. Centro geométrico de la flecha. Disco, el cual representa un conjunto de álabes, un impulsor, etc. Distancia de la masa de desbalance respecto al centro geométrico
de la flecha. Modulo de Young.
Fuerza externa que actúa sobre la flecha. Ver ecuación (4.2).
Ver ecuación (4.3). Fuerza axial constante. Fuerza que actúa sobre la flecha respecto al eje inercial . Fuerza que actúa sobre la flecha respecto al eje inercial . Fuerza producida por el desbalance en el eje . Fuerza producida por el desbalance en el eje . Modulo de elasticidad transversal de la flecha.
i Número de modos Momento de área de inercia de la sección transversal de la flecha a
lo largo del eje neutro. Momentos de inercia respecto al eje . Momentos de inercia respecto al eje . Rigidez de la sección transversal de la flecha asimétrica en la
dirección . Rigidez de la sección transversal de la flecha asimétrica en la
dirección w. Segundos momentos de área de la flecha asimétrica de acuerdo al
sistema de referencia fijo. Momento de área de inercia del disco. Número de planos de balanceo.
Componentes de rigidez de los soportes en el marco de referencia fijo .
Constante de rigidez de los soportes. Longitud de la flecha.

Masa de desbalance. Masa de balanceo. Masa del disco. Resultante de la sumatoria de pesos modales. Masa concentrada de la flecha asimétrica.
Número de planos de balanceo. Funciones de desplazamiento típicas de una viga en flexión.
Centro de masa del disco. Origen del sistema coordenado fijo de una flecha asimétrica. Origen del sistema coordenado rotatorio de una flecha asimétrica. Componente radial de la masa de balanceo a lo largo del eje . Componente radial de la masa de balanceo a lo largo del eje .
Marco de referencia inercial. Marco de referencia fijo.
Área de la sección transversal de la viga Ver ecuación (5.62). Tiempo. Energía cinética del disco. Energía cinética de la flecha. Energía cinética a causa del desbalance. Coordenada de sobre el eje . Componente del desplazamiento del centro geométrico respecto al
eje inercial . Energía de deformación considerando la deformación longitudinal
del punto . Energía de deformación para el caso de una flecha simétrica sujeta
a una fuerza axial . Energía de deformación de la flecha. Desbalance original equivalente para el plano de
corrección. Vector efecto del modo i en el plano j.
Vibración inicial del modo i en el plano j.
Vibración residual del modo i en el plano j.
Vibración residual final del modo i en el plano j. Coordenada de sobre el eje . Componente del desplazamiento del centro geométrico respecto al
eje inercial . Peso modal colocado en el plano de balanceo Trabajo virtual que actúa sobre la flecha a causa de las propiedades
de los soportes. Frecuencia natural.
Vector de velocidad angular instantánea respecto al marco .
Vector de velocidad angular respecto al marco de referencia fijo .
Vector que contiene los cambios entre la vibración medida en a una velocidad , antes y después de colocar una masa en
. Vibración original medida en el transductor a una velocidad
. Radio de Poisson.
Ejes fijos.

Ejes rotatorios. Factor de asimetría modal Factor de amortiguamiento modal. Ángulo de rotación sobre el eje . Ángulo de rotación sobre el eje . Ángulo de rotación sobre el eje . ° Derivación con respecto al tiempo. Velocidad angular. Masa por unidad de volumen. Factor de forma modal. Distorsión de la flecha. Amortiguamiento viscoso. Ángulo de fase entre la respuesta y la fuerza de excitación.
Efecto de sobre la distribución de desbalance. Coeficiente de influencia para la vibración medida en la longitud
del rotor a una velocidad , cuando una masa se coloca en .
Desplazamiento en la direcciones . Desplazamiento en la direcciones Z.
Eigenvalores propios del sistema rotor-soportes. Eigenvectores propios del sistema rotor-soportes. Ver ecuación (5.64). Ver ecuación (5.65). Constante de amortiguamiento proporcional de rigidez. Constante de amortiguamiento proporcional de masa. Matriz de masas utilizadas en la corrida de prueba. Matriz de masa del sistema rotor-soportes. Matriz de masa consistente para el movimiento de traslación de la
flecha. Matriz de masa consistente para el movimiento de rotación de la
flecha. Matriz de masa del disco. Matriz de amortiguamiento del sistema rotor-soportes. Matriz parcial de efectos giroscópicos. Matriz de efectos giroscópicos. Matriz de rigidez del sistema rotor-soportes. Matriz de rigidez de la flecha con sección transversal asimétrica. Matriz de rigidez de los soportes de un sistema con flecha
asimétrica. Matriz clásica de rigidez de la flecha. Matriz de vectores efecto.
Matriz del arreglo de masas de pruebas. Matriz de coeficientes de influencia. Masas de corrección. Vector de cargas aplicadas al sistema rotor-soportes.
Vector de aceleración.
Vector de velocidad.
Vector de desplazamiento.

RESUMEN
La operación de maquinas rotatorias requieren de las solución de un varios problemas técnicos,
incluyendo aquellos relacionados con el comportamiento dinámico de sistemas rotor-soportes y en
particular, el balanceo de las fuerzas generadas por una distribución no uniforme de masa
alrededor de los ejes de l flecha.
En la práctica, los métodos de balanceo han sido aplicados exitosamente en rotores que cuentan con flechas
de sección transversal simétrica. Sin embargo, en el caso de los rotores asimétricos, los métodos de
balanceo son escasos y en su mayoría complejos, esto a causa de que la respuesta es afectada por el factor
de asimetría y amortiguamiento presentes en este tipo de rotores.
El objetivo de esta tesis es proponer una metodología para determinar un arreglo de pesos modales para el
balanceo de rotores asimétricos en más de un modo de vibración a la vez, esto con el fin de disminuir el
número de pruebas y tiempo de ejecución del proceso de balanceo.
Para la realización de este trabajo se desarrolló un modelo numérico basado en el método de elemento
finito, que permite calcular diagramas de Campbell, frecuencias naturales, formas modales y respuesta al
desbalance de rotores simétricos y asimétricos. De esta manera se logró analizar de manera detallada el
comportamiento dinámico de rotores asimétricos, utilizando especialmente diagramas polares de respuesta.
Del análisis se concluyó que los ejes orientados en las posiciones de del rotor, tomando como
referencia el eje de rigidez mayor, presentan mayor y menor sensibilidad a la fuerza de excitación, siendo
éstos los únicos ejes donde la respuesta se encuentra en condiciones de resonancia, es decir, se atrasa 90°
con respecto a la excitación. De acuerdo con lo anterior, se propone un método de balanceo basado en la
teoría de análisis modal y coeficientes de influencia, donde el arreglo de pesos modales de prueba se utiliza
para determinar los coeficientes de influencia en los ejes de del rotor.
Con el método propuesto se logró disminuir la vibración inicial de un rotor asimétrico en forma numérica
hasta en un 80%.

ABSTRACT
The development of rotating machinery required the solution of a number of technical problems,
including those related with the dynamic behavior of rotor-bearing systems and, in particular, the
balancing of forces generated by a non-uniform distribution of mass around the axis of rotation of
shaft.
In the practice, the balancing methods had been applied successfully in rotors that have symmetric
shaft stiffness. Although, in the case of rotors with asymmetric shaft stiffness just as the
turbogenerators, the balancing methods are rare and greater complex due to the unbalance
response is affected by the ratio of asymmetry to modal damping that is presented in this type of
rotors.
The aim of this thesis work is to propose a procedure to determinate a modal weights arrangement
to the balancing of asymmetric rotors in several vibration modes at the same time, in order to
minimize the trial runs and time consuming of the procedure balancing.
In this work, the analysis of the dynamic behavior of asymmetric rotors was formulated with the use
of the Finite Element Method and programmed for computer calculation. The equations of motion
were solved by the Direct Method in order to calculate the Campbell diagrams, natural frequencies,
mode shapes and unbalance response. In this study, were analyzed in detail the polar response
diagrams or Nyquist plots and was concluded that the ±45° axes of the asymmetric shaft, taking as
a reference the major stiffness axis, presents higher and lower sensibility to the unbalance force
being only in these axes where the response is 90° delay with respect to the unbalance force.
According to this study a balancing method is proposed, based in the influence coefficient method
and the modal balancing method, where a modal weights arrangement of trail is utilized to
determinate the influence coefficients of the ±45° axes of the asymmetric shaft.
With the proposed method, it was achieved to diminish the initial vibration of an asymmetric rotor in
numerical way up to 80%.

C A P I T U L O 1
INTRODUCCION
En este capítulo se presentan algunos antecedentes referentes al balanceo de rotores, la
descripción del problema y el objetivo, así mismo se presenta una breve descripción de la
organización de este trabajo de tesis
1.1 ANTEDECENTES
Durante el funcionamiento de una máquina rotatoria, sus componentes giran alrededor de un eje de
rotación que no coincide con el eje principal de inercia, lo cual genera una fuerza centrífuga. A esta
condición se le conoce como desbalance. Los efectos de este desbalance provocan desgaste
excesivo en chumaceras, sellos, acoplamientos, etc. o fallas por fatiga en la carcasa, pernos y
álabes entre otros, lo que es motivo de mantenimiento correctivo que produce pérdidas
económicas.
De acuerdo con Bishop y Parkinson [12], una condición de desbalance puede eliminarse colocando
pesos de corrección en los planos de balanceo del rotor, de tal manera que la fuerza centrifuga
producida por estos pesos neutralice a la fuerza centrífuga generada por el desbalance original. A
este proceso se le conoce como balanceo del rotor, y su objetivo es determinar la magnitud y
posición angular de los pesos de corrección.
Como lo menciona Preciado [13], en años anteriores los rotores trabajaban a velocidades menores
a su primera frecuencia natural, por lo que el comportamiento de las flechas se consideró como la
de un cuerpo rígido, y el balanceo de un rotor se realizaba en un máximo de dos planos de
balanceo siguiendo un simple procedimiento basado en el equilibrio de las fuerzas y momentos
producidos por el desbalance y los pesos de corrección.
Sin embargo, con la aparición de la turbomaquinaria, nuevos métodos de balanceo fueron
requeridos para garantizar la adecuada operación por arriba de una o más de sus frecuencias
naturales. Bajo estas condiciones, la deflexión de la flecha es la característica más importante en el
comportamiento del rotor.
Para resolver este problema se adoptaron dos diferentes estrategias, las cuales dieron origen a dos
de los métodos de balanceo más utilizados: el método de coeficientes de influencia y el método de
balanceo modal.

El método de coeficientes de influencia fue el primero en desarrollarse en procedimientos limitados
a uno o dos planos de balanceo. Este método está basado en la filosofía causa-efecto, en la cual
se considera una proporción directa entre el desbalance y la respuesta. En términos generales, el
método de coeficientes de influencia, tal como se aplica en la práctica, requiere de un rodado de
prueba por cada plano de balanceo utilizado, lo cual implica que se emplee mucho tiempo para las
actividades de balanceo. Otra característica del método de coeficientes de influencia es que no
acepta el uso de arreglos de pesos, dado que el procedimiento para su aplicación requiere de la
colocación de pesos individuales plano por plano para medir las vibraciones del rotor en los planos
de medición utilizados.
Por otra parte, el método de balanceo modal está basado en el principio de que la respuesta al desbalance
de un rotor puede expresarse como una serie de componentes modales, cada una correspondiente a un
grado de libertad con una frecuencia natural y forma modal característica. De forma similar, las fuerzas de
desbalance pueden expresarse como una serie de desbalances modales. Entonces, la deflexión de la flecha
se compone de las contribuciones de las formas modales del sistema, donde la escala de cada forma modal
esta afectada por un factor que es función del desbalance modal correspondiente. En la práctica, el método
de balanceo modal requiere del análisis de los diagramas de Bode de amplitud o de los polares de
respuesta, con lo cual se pretende identificar los diferentes modos que se encuentran presentes en el rango
de velocidades de operación del rotor, y con esto seleccionar los arreglos de pesos de prueba destinados a
balancear modos específicos de vibración sin afectar negativamente a otros modos. Por tanto, el método de
balanceo modal requiere de experiencia por parte del analista para identificar los modos de vibración.
La diferencia entre los métodos de coeficientes de influencia y balanceo modal es el número de corridas de
prueba requeridas para determinar los pesos de corrección adecuados. En el método de coeficientes de
influencia el número de corridas de prueba está definido por el número de planos de balanceo y no puede
ser reducido.
En el caso del método modal, el número de corridas de prueba pueden reducirse balanceando varios modos
al mismo tiempo. A causa de las características de ambos métodos de balanceo, se producen grandes
pérdidas económicas, principalmente porque se emplea mucho tiempo para disminuir el nivel de desbalance
de la máquina.
En años recientes se han desarrollado procedimientos que combinan las ventajas de los métodos de
balanceo modal y por coeficientes de influencia. Uno de estos procedimientos es el conocido como balanceo
modal por coeficientes de influencia, el cual está basado en la posibilidad de utilizar el método de los
coeficientes de influencia cuando se emplean arreglos de pesos de prueba, y en la teoría de descomposición
modal de arreglos de pesos. En teoría, este método requiere una sola corrida de prueba si es que se
conocen las formas modales del rotor.

De acuerdo con Preciado y Aguirre [14], en el método de balanceo modal por coeficientes de influencia un
arreglo de pesos de prueba se descompone en arreglos de pesos que afectan, cada uno, a un modo
específico de vibración. La descomposición modal de los pesos de prueba se realiza mediante la extracción
de parámetros modales de la respuesta del rotor. Estos parámetros pueden obtenerse de manera
experimental o mediante el análisis de modelos numéricos del rotor.
Para realizar la descomposición modal de los pesos de prueba se considera que la forma modal del rotor es
proporcional para cualquier configuración de desbalance, es decir, la forma modal normalizada del rotor es la
misma para cualquier arreglo de pesos que excite ese modo. Una vez que se ha determinado el arreglo de
pesos se puede utilizar el método generalizado de los coeficientes de influencia para varias velocidades de
operación del rotor. Puesto que cada arreglo modal afecta un modo específico de vibración, a partir de una
sola corrida de prueba se puede identificar el efecto que cada arreglo modal tiene en el modo
correspondiente, con lo cual se obtiene la información suficiente para la generación de la matriz de
coeficientes de influencia.
En la práctica, los métodos de balanceo mencionados han sido aplicados exitosamente para el balanceo de
rotores que cuentan con flechas de sección transversal simétrica, es decir, en aquellos que poseen
propiedades de rigidez igual en toda su sección transversal.
De acuerdo con Parkinson [4] y Colín [10], entre otros investigadores, en el caso de los rotores asimétricos,
es decir, aquellos que poseen una sección transversal con propiedades de rigidez diferente en sus ejes de
inercia principales, los métodos presentan deficiencias, ya que las características de este tipo de rotores
afectan a las velocidades críticas y a la magnitud de la respuesta al desbalance del rotor. Tal es el caso de
los rotores de algunos generadores de dos polos y de los excitadores de los turbogeneradores.
Para el caso de rotores asimétricos, los diagramas polares de respuesta que se obtienen para el balanceo
no son de forma similar a un círculo, como sucede con los rotores simétricos, sino que son de forma elíptica.
A causa de esto los rotores asimétricos presentan un comportamiento más complejo, lo que dificulta la
localización de la posición angular de la fuerza de excitación, y los métodos de balanceo mediante
diagramas polares de respuesta (balanceo modal) para rotores asimétricos son escasos y en su mayoría
complejos.
1.2 DESCRIPCION DEL PROBLEMA Y OBJETIVO

Si un rotor presenta desbalance a causa de una masa, puede obtenerse la amplitud y la fase del vector de
vibración para varias frecuencias y graficarse en un diagrama polar de respuesta en estado estable, el cual
facilita el análisis del comportamiento dinámico del rotor.
En el caso de los rotores simétricos, los diagramas polares de respuesta son de forma circular. En estos
diagramas el vector de vibración de máxima amplitud se presenta aproximadamente en condiciones de
resonancia (cuando la velocidad de rotación es igual a la frecuencia natural), y se atrasa un ángulo de 90°
con respecto a la posición angular donde se encuentra la fuerza de excitación.
En el caso de los rotores asimétricos, los diagramas polares de respuesta son de forma elíptica, y presentan
características diferentes a la de los simétricos, ya que la respuesta depende principalmente de dos
parámetros adimensionales: el factor de amortiguamiento y el de asimetría modal. De acuerdo con
Parkinson [4], Iwatsubo y Nakamura [6], Matsukura, et al [7], entre otros investigadores, estos dos
parámetros provocan que el vector de vibración en condiciones de resonancia presente diferentes
amplitudes y ángulos de fase para diferentes posiciones angulares de la fuerza de excitación, lo cual dificulta
identificar el vector de vibración en resonancia en el diagrama polar de respuesta.
Los parámetros que producen la diferencia entre los diagramas polares de respuesta de los rotores
simétricos y asimétricos han sido estudiados por Parkinson [4], Matsukura, et al [7] y Colín [10], con
el fin de desarrollar métodos eficientes para el balanceo de los rotores. En el caso de los rotores
asimétricos, los métodos son escasos y más complejos, a causa de la asimetría, el
amortiguamiento y de la dificultad para determinar la posición angular de la fuerza de excitación en
los diagramas polares de respuesta. En vista de lo anterior, el objetivo de este proyecto es obtener una metodología para determinar un arreglo
de pesos modales para el balanceo de rotores asimétricos en más de un modo de vibración a la vez, esto
con el fin de disminuir el número de pruebas y tiempo de ejecución del proceso de balanceo. El método está
basado en la teoría de análisis modal y coeficientes de influencia, y permite el balanceo utilizando
principalmente la información de los diagramas polares de respuesta.
1.3 ORGANIZACIÓN DE LA TESIS
El presente trabajo de tesis se encuentra organizado de la siguiente manera:

El Capítulo 1 presenta una introducción general del trabajo, en el cual se describen algunos
antecedentes referentes al tema de balanceo de rotores, el objetivo y una breve descripción de la
organización de la tesis.
Las referencias más importantes encontradas en la literatura sobre el balanceo de rotores
asimétricos se presentan en el Capítulo 2.
En el Capítulo 3 se presentan las ecuaciones características de los elementos de un rotor. Estas
ecuaciones representan las energías cinéticas, de deformación y trabajo virtual, las cuales
constituyen la base para interpretar el comportamiento dinámico de un rotor.
El Capítulo 4 trata sobre la teoría y conceptos básicos de los métodos de balanceo modal y por
coeficientes de influencia.
En el Capítulo 5 se describen las ecuaciones diferenciales de movimiento de un rotor simétrico y
asimétrico con base al método de elemento finito, así mismo, se presentan las soluciones que
permiten determinar las frecuencias naturales, formas modales y respuesta al desbalance.
En el Capítulo 6 se muestran los resultados obtenidos de la simulación numérica de los modelos
matemáticos que se desarrollaron con el fin de conocer el comportamiento dinámico de rotores
asimétricos. Los modelos matemáticos fueron desarrollados con base a las técnicas de elemento
finito y para su validación, se compararon los resultados obtenidos en este trabajo con los
presentados en la literatura, tanto para rotores asimétricos como simétricos.
Las características más importantes que presenta el comportamiento dinámico de los rotores
asimétricos, tomando como base los diagramas polares de respuesta obtenidos de la simulación
numérica se presentan en el Capítulo 7.
En el Capítulo 8 se propone un método de balanceo para rotores asimétricos mediante arreglo de
pesos modales. El método aquí propuesto es aplicado al balanceo de un rotor asimétrico de
manera numérica, con la finalidad de comprobar su efectividad.
En el Capítulo 9 se presentan las conclusiones obtenidas en el presente trabajo y las
recomendaciones que pueden desarrollarse en el futuro.
C A P I T U L O 2
REVISION BIBLIOGRAFICA
En este capítulo se presentan las investigaciones más importantes encontradas en la literatura
sobre el comportamiento dinámico y balanceo de rotores asimétricos. Se menciona la influencia de
la asimetría, amortiguamiento y posición angular de la fuerza de excitación en los diagramas
polares de respuesta de los rotores asimétricos, también se presentan los métodos de balanceo de
este tipo de rotores basados en los coeficientes de influencia y análisis modal los cuales fueron
desarrollados por algunos investigadores.
2.1 REVISION BIBLIOGRAFICA
El primer aporte al campo de la rotodinámica fue realizado por Jeffcot [1], quien consideró un modelo con
una flecha de sección transversal circular soportada libremente sobre chumaceras rígidas, en este, se incluía
un disco en la parte central cuyo centro de masa se encuentra desplazado una distancia del centro de giro.
Como resultado de este análisis, Jeffcott concluyó que la vibración de una flecha en rotación está compuesta
por dos partes: una vibración transitoria amortiguada, que representa el movimiento libre del sistema
causada por pequeños disturbios, y una vibración forzada (estado estable) que es función de la masa
excéntrica y de la velocidad angular de la flecha. Las conclusiones más importantes obtenidas de su estudio
fueron:
• Cuando la velocidad angular tiende a cero, el ángulo de fase del vector vibración con respecto a la
posición angular donde se encuentra la fuerza de excitación tiende a 0°.
• El ángulo de fase se incrementa con la velocidad angular de la flecha, hasta llegar a 90° con respecto
a la posición angular de la fuerza de excitación cuando la velocidad angular es igual a la frecuencia
natural del sistema.
• Para velocidades angulares arriba de la frecuencia natural, el ángulo de fase cambia de tal forma
que para valores muy grandes de la velocidad angular de la flecha, el ángulo de fase tiende a un
valor de 180° con respecto a la posición angular de la fuerza de excitación.

Las consideraciones del análisis de Jeffcott aportaron las bases para el balanceo modal de rotores
simétricos, sin embargo, los problemas presentados en la turbomaquinaría con características diferentes a
estos rotores, tal como los turbogeneradores, propiciaron el estudio de los rotores asimétricos.
El primer estudio sobre los rotores asimétricos fue realizado por Taylor [2], quien utilizó una versión del
modelo de Jeffcott, con el propósito de estudiar la inestabilidad de un turbogenerador de dos polos. En su
estudio concluyó que la fuerza elástica experimentada por el rotor no se encuentra en fase con el
desplazamiento, y determinó que la fuerza elástica tiene una componente radial que es paralela al
desplazamiento y una tangencial que es perpendicular a la dirección del desplazamiento. La componente
tangencial la consideró como una característica única de las flechas asimétricas. Experimentalmente
determinó que la influencia de pesos colocados en una misma posición angular del rotor no es proporcional
a la respuesta vibratoria.
A partir de esta última consideración, Taylor [2] y Bishop, et al. [3], entre otros, concluyeron que la vibración
de una flecha asimétrica en rotación presenta dos características importantes:
1) La respuesta vibratoria del rotor cambia en amplitud y fase para diferentes posiciones angulares de la
fuerza de excitación.
2) Existe una componente de la vibración cuya frecuencia es igual al doble de la frecuencia de giro del
rotor. También determinaron que cuando la asimetría modal es más grande que el factor de
amortiguamiento del sistema, se presenta una inestabilidad en la zona de resonancia. Sus estudios
propiciaron futuras investigaciones sobre las propiedades de inestabilidad de los rotores asimétricos
y sus formas de balanceo.
Los efectos de la asimetría y amortiguamiento considerados por Taylor [2] y Bishop, et al. [3], también fueron
estudiados por Parkinson [4], con la diferencia que encontró dos términos adicionales los cuales están en
función de la asimetría modal de la flecha, los cuales son el amortiguamiento viscoso e histerético.
Parkinson encontró una expresión analítica que considera la función de la asimetría modal de una flecha,
considerando una ecuación de movimiento para cada eje principal de inercia de un rotor asimétrico. También
estudió el comportamiento vibratorio de una flecha asimétrica mediante la construcción de los diagramas
polares de respuesta considerando un factor de amortiguamiento en relación con la asimetría modal de
manera que le permitió obtener la forma geométrica característica de los diagramas polares de respuesta de
una flecha asimétrica, las cuales son:
a) un círculo si .
b) una elipse si .

c) una parábola si .
d) una hipérbola si .
En su análisis, Parkinson sólo considero los diagramas polares de respuesta en forma elíptica, encontrando
que al trazar una línea recta en el diagrama entre el punto correspondiente a la frecuencia natural asociada
con la rigidez máxima y el punto correspondiente a la frecuencia natural asociada con a la rigidez mínima de
la sección transversal del rotor, esta línea trazada es paralela a la posición angular de la fuerza de
excitación. De sus investigaciones concluyó que para velocidades de la flecha asimétrica muy lejanas de las
velocidades críticas correspondientes a los ejes de inercia principales, el comportamiento vibratorio de la
flecha es similar al de una flecha simétrica.
Otros autores como Shiraki y Kanki [5] propusieron un método de balanceo de rotores asimétricos basado en
el principio de balanceo modal y en el análisis de los diagramas polares de respuesta obtenidos
experimentalmente. En su método Shiraki y Kanki consideran las posiciones angulares de ±45° con respecto
al eje de menor rigidez de la sección transversal del rotor. En sus investigaciones encontraron las siguientes
características de los diagramas polares de respuesta:
• Son elípticos y tienen sus ejes mayor y menor orientados 45° y -45° con respecto al eje que contiene
la rigidez mínima de la sección transversal del rotor.
• La amplitud máxima de la respuesta vibratoria del rotor esta determinada cuando la fuerza de
excitación esta a -45°. Bajo esta condición, el vector de vibración en condiciones de resonancia se
encuentra en fase con el eje mayor de la elipse.
• La amplitud mínima de la respuesta vibratoria del rotor esta determinada cuando la fuerza de
excitación esta a 45°. Bajo esta condición, el vector de vibración en condiciones de resonancia se
encuentra en fase con el eje menor de la elipse.
Otros investigadores que abordaron el estudio de un rotor asimétrico con base en sus ejes principales de
inercia fueron Iwatsubo y Nakamura [6], quienes analizaron el comportamiento vibratorio de una flecha
asimétrica soportada sobre chumaceras rígidas con propiedades de rigidez iguales tanto en el eje vertical
como el horizontal. En sus análisis obtuvieron una ecuación diferencial de movimiento para cada eje de
inercia principal del rotor. Concluyeron que la técnica de balanceo modal es difícil de aplicar a las flechas
asimétricas, a causa de que en condiciones de resonancia el desplazamiento no es siempre de amplitud
máxima y no siempre presenta un ángulo de fase igual a 90° con respecto a la posición angular de la fuerza
de excitación, como en el caso de los rotores simétricos. Propusieron un método de balanceo basado en los
coeficientes de influencia, en el que los coeficientes se definen en forma separada para cada eje de inercia
principal del rotor.

También concluyeron que la sensibilidad de la flecha asimétrica es función del cociente de las rigideces
correspondientes a los ejes de inercia principales de la flecha, de la frecuencia de excitación y de la posición
angular de la fuerza de excitación.
De la misma manera que Iwatsubo y Nakamura [6], otros autores desarrollaron métodos basados
en los coeficientes de influencia, además procuraron optimizar el proceso de balanceo tal como
Matsukura, et al [7], quienes trataron sobre el balanceo de rotores flexibles con especial referencia
a rotores asimétricos. Estos investigadores desarrollaron un método de balanceo basado en los
coeficientes de influencia estimados de la vibración del rotor causada por una masa de desbalance.
En el método propuesto por estos investigadores se considera un factor de convergencia, con el fin
de disminuir los desbalances residuales más rápidamente. Sin embargo, encontraron algunos
problemas para proponer la magnitud del factor de convergencia que pudiera ser aplicada para
todos los casos prácticos de balanceo de rotores asimétricos, ya que desafortunadamente, este
factor de convergencia depende de varios factores, tales como la asimetría modal, la posición
angular del desbalance y la posición angular donde se colocan los pesos de balanceo. En este
sentido, propusieron los valores para el factor de convergencia de , los cuales fueron
determinados numéricamente observando los efectos sobre la convergencia de las vibraciones
residuales en el proceso de balanceo, de otra manera, determinar este valor en la práctica
resultaría en un proceso demasiado complejo y riesgoso.
Otros investigadores se enfocaron a optimizar los métodos de balanceo basados en los coeficientes de
influencia, tal como Songbo y Yacai [8]. Estos investigadores propusieron un método para el balanceo de
rotores flexibles con rigidez asimétrica, basado en los valores de los coeficientes de influencia calculados de
la respuesta de un rotor y modificados experimentalmente. Su estudio fue realizado sobre una flecha
asimétrica y también consideraron los parámetros geométricos y físicos de los soportes del sistema ya que
estos afectan a la aproximación de los coeficientes de influencia. Mediante esta consideración desarrollaron
un método optimizado de balanceo. El modelo matemático fue discretizado y resuelto por el método de
elemento finito, concluyendo que la respuesta de un sistema complejo puede aproximarse considerando
varios factores como la inercia rotacional, efectos giroscópicos, amortiguamiento, deflexión, etc. por lo que
los coeficientes de influencia pueden calcularse para el balanceo.
Por otro lado, también fueron analizados los coeficientes de influencia dependientes del tiempo y sus efectos
en los diagramas polares de respuesta, tal es el caso de los investigadores Inagaki , Kanki y Shiraki [9],
quienes desarrollaron un método analítico para la evaluación de la respuesta de un rotor asimétrico. Sus
estudios se basaron en la ecuación de movimiento con coeficientes dependientes del tiempo de una flecha
asimétrica soportada con chumaceras con propiedades de rigidez diferentes en los ejes vertical y horizontal.
En este estudio las ecuaciones de movimiento fueron resueltas con el método de balanceo armónico y la
matriz de transferencia con el fin de obtener una solución aproximada para la vibración causada por factores

como desbalance, flexión y cortante. Experimentalmente encontraron que los diagramas polares de
respuesta correspondientes a la primera velocidad crítica (primer modo) de cuatro casos con la fuerza de
excitación en la posiciones angulares de 0, 45, 90 y 315° son elípticos y están orientados sobre los ejes de
45°. Por otro lado, para la segunda velocidad crítica (segundo modo) los diagramas polares de respuesta
son similares a los correspondientes a un rotor simétrico.
Por otra parte, Colín [10] estudio el comportamiento dinámico de los rotores asimétricos, considerando
masas excéntricas (desbalance) del rotor como causa de la generación de fuerzas centrífugas. Para su
análisis consideró un modelo matemático de dos grados de libertad basado principalmente en el trabajo de
Taylor [2], donde la variación de la rigidez se presenta como función de la posición angular de la sección
transversal del rotor. En su modelo consideró rampas de excitación de tipo lineal con el fin de observar los
efectos en los diagramas polares de respuesta. El modelo matemático fue validado experimentalmente,
tomando como base el inicio y el eje mayor del diagrama polar de respuesta obtenido de un rotor
experimental.
El balanceo fue realizado considerando tres métodos: en el primero consideró las posiciones angulares a
±45° de la sección transversal del rotor, en el segundo consideró la localización de la fuerza de excitación, y
uno tercero que combina los dos métodos anteriores.
De la revisión bibliográfica realizada, se concluye que el balanceo de rotores asimétricos aún es un reto
técnico, a causa de que las posiciones angulares del desbalance afectan no solamente la fase de la
respuesta sino también a las amplitudes. Además el balanceo de estos rotores se complica a causa de que
el comportamiento vibratorio de un rotor asimétrico depende del factor de asimetría, amortiguamiento del
sistema y de la posición angular de la fuerza de excitación.
Se puede apreciar que los métodos propuestos para el balanceo de rotores asimétricos están basados, en
su mayoría, en el método de los coeficientes de influencia y en el análisis modal. Algunos autores han
considerado por separado cada eje de inercia principal, y logrando solo el balanceo en un solo modo de
vibración. Otro aspecto relevante de esta revisión bibliográfica es que los diagramas polares de respuesta
correspondientes a la primera velocidad crítica son elípticos, sin embargo, para la segunda velocidad crítica
(segundo modo) los diagramas polares de respuesta son similares a los correspondientes a un rotor
simétrico. Se concluye que no se ha propuesto una metodología para balancear varios modos de vibración a
la vez utilizando arreglo de pesos modales.

C A P I T U L O 3
CARACTERISTICAS DE LOS ELEMENTOS DE UN ROTOR
En este capítulo se presentan las ecuaciones generales utilizadas para la caracterización de cada
uno de los elementos de un rotor formuladas a partir de la energía cinética, de deformación y
trabajo virtual, las cuales constituyen la base para el estudio del comportamiento dinámico de los
sistemas rotatorios.
3.1 ELEMENTOS DE UN ROTOR
En la Fig. 3.1 se muestran los elementos básicos de un rotor.
Figura 3.1. Elementos de un rotor.
Donde:
Flecha con sección transversal simétrica o asimétrica.
Disco, el cual representa un conjunto de álabes, un impulsor, etc.
Soportes, con propiedades de rigidez y/o amortiguamiento.
Masa de desbalance.
La caracterización de los elementos del rotor se realiza con base a las expresiones de la energía
cinética, de deformación y trabajo virtual, éstas son presentadas por Lalane y Ferraris [11]. De esta
manera, para la caracterización de la flecha se utilizan las expresiones de la energía cinética y de
deformación, para el disco y la masa de desbalance se considera únicamente la energía cinética.

En el caso de los soportes, se considera el trabajo virtual para calcular las fuerzas que actúan
sobre la flecha.
3.1.1 DISCO
La caracterización del disco se obtiene al considerar únicamente la energía cinética de acuerdo a
los marcos de referencia de la Fig. 3.2.
Figura 3.2. Marcos de referencia del disco sobre una flecha girando.
Del diagrama de la Fig. 3.2, es el centro de masa del disco, es un marco de referencia
inercial, esta fijo al disco, y son las coordenadas de sobre los ejes ,
respectivamente, y la coordenada sobre el eje permanece constante. El sistema coordenado
a relacionado a est , por medio de los ángulos y . La n orie tación del disco se obtiene al
rotar una cantidad alrededor del eje , alrededor del eje , y por alrededor del eje .
El vector de velocidad angular instantánea respecto al marco esta dado por la expresión:
(3.1)
Donde, y son vectores unitarios a lo largo de los ejes y .
Así mismo, el vector de velocidad angular respecto al marco d efer nciae r e fijo se expresa como:
(3.2)

Si se consideran los ejes como direcciones principales de inercia, la masa del disco se
puede expresar como un tensor de inercia respecto a como:
(3.3)
Donde, es el momento de área de inercia del disco.
Por simplicidad, se considera el disco como simétrico , rígido (los ángulos de rotación y
son pequeños) y que gira a una velocidad angular constante. Entonces, la ecuación de la
energía cinética del disco se expresa como:
(3.4)
De la ec. 3.4, representa la energía del disco girando a una velocidad , y el último termino
, representa los efectos giroscópicos.
3.1.2 FLECHA
La flecha se representa como una viga con sección circular constante y se caracteriza por la
energía cinética y de deformación.
La ecuación general de la energía cinética de una flecha de longitud se expresa como:
(3.5)
Donde, es la masa por unidad de volumen, es el área de la sección transversal de la viga, es
el momento de área de inercia de la sección transversal de la flecha a lo largo del eje neutro. La
primera integral, es la expresión clásica de la energía cinética de una fecha en flexión; la segunda
integra,l es el efecto secundario de la inercia rotacional (de acuerdo a la viga de Timoshenko); y la
última integral representa el efecto giroscópico. La energía de deformación de la flecha se obtiene de acuerdo al sistema coordenado mostrado en la Fig.
3.3.

Figura 3.3. Sistema coordenado de la viga. Del diagrama de la Fig. 3.3, es el centro geométrico de la flecha, es un punto arbitrario
sobre la sección transversal, y , son los componentes del desplazamiento del centro
geométrico respecto a los ejes inerciales , , respectivamente.
Considerando la deformación longitudinal del punto , la ecuación general de la energía de
deformación se expresa como:
(3.6)
Donde, es el modulo de Young, y , son los momentos de inercia respecto a los ejes ,
respectivamente.
Para el caso de una flecha simétrica sujeta a una fuerza axial constante, la expresión de la
energía de deformación esta dada como:
(3.7)
Con el propósito de evitar términos periódicos dependientes del tiempo a causa de las propiedades
de los soportes, la energía de deformación de la flecha se expresa como una función de los
componentes de desplazamiento y , los cuales se pueden expresan como:
(3.8)
(3.9)
Entonces la energía de deformación resulta de la combinación de como:
(3.10)
La ec. 3.10 representa la energía de deformación de una flecha simétrica sujeta a una
fuerza de excitación constante como una función de los componentes de desplazamiento respecto
a los ejes inerciales.

3.1.3 SOPORTES
Para la caracterización de los soportes, los términos de rigidez y amortiguamiento se
consideran conocidos, como se muestra en la Fig. 3.4.
Figura 3.4. Sistema de fuerzas de los soportes.
El trabajo virtual que actúa sobre la flecha se determina de acuerdo a la siguiente expresión:
(3.11)
La ec. 3.11 también se puede expresar como:
(3.12)
Donde, y son los componentes de la fuerza generalizada.
En forma matricial, las ec. 3.11 y 3.12 se expresan como:
(3.13)
La ec. 3.13 representa las fuerzas que actúan sobre la flecha respecto a los ejes inerciales , ,
los cuales giran junto con la flecha.
3.1.4 MASA DE DESBALANCE
De acuerdo a la Fig. 3.5, la masa de desbalance se considera como una masa colocada a una
distancia del centro geométrico de la flecha y perpendicular a lo largo del eje .

Figura 3.5. Masa de desbalance.
Del diagrama de la Fig. 3.5, las coordenadas de la masa de desbalance con respecto a los ejes
inerciales , , se expresan como:
(3.14)
Si se deriva la ec. 3.14 con respecto al tiempo, se obtiene:
(3.15)
Entonces, la expresión de la energía cinética a causa del desbalance esta dada por:
(3.16)
En la ec. 3.16, la masa se considera pequeña con respecto a la masa de la flecha.

C A P I T U L O 4
METODOS DE BALANCEO
Este capítulo presenta la teoría y conceptos de los métodos de balanceo modal y coeficientes de
influencia.
4.1 METODO DE BALANCEO MODAL
De acuerdo con Bishop y Parkinson [12], si sometemos un sistema de grados de libertad a una
excitación, éste responderá vibrando de manera exclusiva y particular de acuerdo a las
propiedades del sistema. A estas vibraciones, se les conoce como modos de vibración del sistema
y a su frecuencia de vibración, como la frecuencia natural del sistema, donde cada modo de
vibración posee una forma propia de movimiento.
En la Fig. 4.1 se muestra un diagrama esquemático de una viga o flecha de longitud simplemente
apoyada en sus extremos, sometida a una fuerza externa . En función de la coordenada
horizontal y el tiempo , la viga tendrá un conjunto infinito de formas modales y
frecuencias naturales .
Figura 4.1. Viga simplemente apoyada en sus extremos.
La función es conocida como la función modal de la ecuación característica de la viga y
es la frecuencia natural de vibración. En general, por cada grado de libertad se tiene un

modo de vibración y una forma modal diferente. Por ejemplo, de la viga simplemente apoyada de la
Fig. 4.1, las formas modales de los primeros cinco modos de vibración se presentan en la Fig. 4.2.
Figura 4.2. Frecuencias naturales y modos de vibración de una viga simplemente apoyada. Mediante una aproximación de análisis modal, se puede establecer que la respuesta al desbalance
de un rotor flexible puede ser considerada como una serie de funciones características o formas
modales, cada una de estas multiplicada por un factor de amplificación dinámica y asociada con
una frecuencia natural particular. Lo anterior se puede expresar por medio del principio de
ortogonalidad, el cual establece que las energías cinéticas o potenciales totales en un sistema son
las sumas correspondientes de las energías cinéticas o potenciales de cada componente modal de
vibración. Con base en lo anterior, se puede establecer que la vibración de un rotor en uno de sus
modos principales no afecta a la de otros. Entonces el principio de ortogonalidad puede ser escrito
como:
(4.1)
Donde es la masa por unidad de longitud, y es el factor de normalización de las funciones,
el cual tiene dimensiones de masa para todos los lo que implica que esta normalizado en
una forma particular. El principio de ortogonalidad permite expresar cualquier función , (por
ejemplo, la flexión de la flecha, excentricidad del centro de masa, etc) en forma de series, por
tanto:
(4.2)

Donde esta dada por:
(4.3)
Si la flecha esta girando a una velocidad en condiciones estables, el centro geométrico de la
flecha se desplazara de su posición original, con una amplitud mayor cuando .
Las magnitudes de estos desplazamientos pueden graficarse en función de la velocidad de rotación
en un diagrama de Bode de amplitud, tal como que se muestra en la Fig. 4.3. Por tanto, el objetivo
de un proceso de balanceo es eliminar o reducir las amplitudes máximas de los picos de vibración
del diagrama de Bode.
Figura 4.3. Diagrama de Bode de amplitud.
Mediante el método de balanceo modal, es posible reducir independientemente la amplitud de un
pico, sin afectar a otros. Es decir, la flexión o el desbalance de la flecha pueden dividirse en
componentes modales de desbalance, donde cada uno de estos componentes está asociado con
uno de los modos principales y con algún plano radial fijo en la flecha.
Por simplicidad, supóngase que el único defecto sobre la flecha es el desbalance, entonces el
centro de masa se desplazará una cierta cantidad del centro geométrico de cada sección
transversal de la flecha, la cual puede expresarse como:
(4.4)
Donde y son las componentes de excentricidad del centro de masa de la flecha en la
direcciones y , respectivamente. Los ejes giran con la flecha, tal como se muestra en la
Fig. 4.4.

Figura 4.4. Sistemas de referencia de la flecha.
Los componentes modales del desbalance de la ec. 4.4, pueden expresarse con respecto a la ec.
4.3 como:
(4.5)
En términos de series modales, la ec. 4.5 puede expresarse como:
(4.6)
Entonces, la distorsión de la flecha (ver Fig. 4.4) se determina por:
(4.7)
De la misma manera que el desbalance, la ec. 4.7 se puede expresar en términos de series
modales como:
(4.8)
De acuerdo con las ec. 4.6 y 4.8, se puede establecer que la componente de desbalance
causa la distorsión en el modo principal de la flecha, donde el factor
complejo de se expresa como:
(4.9)

Aquí, representa el amortiguamiento viscoso sobre cualquier sección de la flecha, el cual es
proporcional a la velocidad de rotación, y es el ángulo de fase entre la respuesta y la fuerza de
excitación, el cual se determina como:
(4.10)
Sin importar que método de balanceo sea considerado, el objetivo principal de estos es modificar la
distribución del desbalance mediante la colocación de masas de balanceo. De esta manera, una
masa puede colocarse sobre el rotor en las posiciones axiales , con componentes radiales
y a lo largo de los ejes , respectivamente, tal como se muestra en la Fig. 4.5.
Figura 4.5. Posición angular de la masa colocada sobre el rotor.
Sin embargo, en la práctica no es posible distribuir la masa de balanceo a lo largo de la flecha
del rotor, en lugar de esto, se coloca en puntos discretos conocidos como planos de balanceo.
Los efectos de sobre la distribución de desbalance puede expresarse en series modales como:
(4.11)
Donde el término representa la componente de en el modo principal de la
flecha.
Entonces, si una serie de masas se colocan en el rotor en los puntos ,
los componentes del desbalance , en los planos , respectivamente,
aumentarán de acuerdo a las siguientes cantidades:
, (4.12)
En el proceso de balanceo modal, el procedimiento es operar el rotor hasta la región de la primera
velocidad crítica, de tal manera que se amplifique. Mediante una corrida de prueba, es posible
determinar el valor de , el cual puede eliminarse colocando una masa de balanceo adecuada
que reduzca la amplitud de para todas las velocidades.
Si después de este proceso la flecha no presenta vibración y la velocidad de rotación no alcanza la
segunda velocidad crítica, entonces el proceso de balanceo finaliza. Sin embargo, si la velocidad de

operación del rotor alcanza la segunda velocidad critica, entonces también se amplifica, y el
valor de se puede determinar con una corrida colocando masas de prueba. Por supuesto,
puede haber sido aumentado por la masa usada para balancear el primer modo, sin embargo, en
esta parte del proceso el objetivo es determinar el valor mas reciente de .
De acuerdo con lo anterior, puede eliminarse por medio de una o más masas de balanceo. Si
solamente se coloca una masa, resultara inevitable afectar a . Por el contrario, si se colocan dos
masas para eliminar , de acuerdo con el principio de ortogonalidad, no se verá afectado. De
esta manera, el proceso puede continuar para balancear los siguientes modos.
Por tanto, cada vez que una componente se elimina al colocar masas de balanceo, los
componentes más altos no se alteran significativamente. Si se utiliza un mínimo de
masas de balanceo, es posible en teoría balancear sin volver a calcular los componentes
.
Analíticamente, el proceso se resume como sigue: considérese un estado en el cual la
componente de tiene que ser balanceada, además, se asume que los primeros modos de
vibración se encuentran balanceados y que es la componente de desbalance neto restante en el
modo. Entonces, la magnitud y dirección de se determina operando el rotor a una
velocidad cercana a . Bajo esta condición, se requieren masas para eliminar la componente
sin introducir nuevas componentes de desbalance en los modos más bajos. Los efectos de las
masas de balanceo sobre los componentes no son de interés, aun cuando algunos de
estos modos se tengan que balancear posteriormente. Si se colocan las masas en los
puntos sobre el rotor, y por simplicidad se asume a respecto al plano ,
las masas de balanceo deben satisfacer las siguientes ecuaciones:
(4.13)
De forma matricial se puede expresar como:
(4.14)

De acuerdo a las ec. 4.13 y 4.14, para el balanceo del rotor, se puede seleccionar un arreglo cuyos
pesos se colocan en los diferentes planos de balanceo en posiciones radiales y angulares
conocidas. La selección de estos pesos debe ser tal que no afecte negativamente el estado de
desbalance de otros modos de vibración.
En la práctica, el método de balanceo modal está basado en el análisis de las señales de respuesta
del rotor, que generalmente se representan en un diagrama polar de respuesta, también llamado de
Nyquist o diagrama de Argand. En este diagrama, se grafica la señal de vibración (generalmente
desplazamiento contra ángulo de fase) en un rango que comprenda las velocidades de operación
de la máquina, y se identifican los vectores de vibración en resonancia para cada uno de los
diagramas polares de respuesta. Entonces, se procede a balancear modo por modo, comenzando
por aquellos que presentan una vibración mayor. Para la aplicación del método de balanceo modal
requiere de gran experiencia por parte del analista y por esta razón, no es fácil de automatizarse y
programar en una computadora.
4.2 METODO DE COEFICIENTES DE INFLUENCIA El método de coeficientes de influencia permite corregir el desbalance de un rotor mediante la
colocación de masas discretas en los planos de corrección. Una matriz de coeficientes de influencia
se construye utilizando los cambios en la vibración después de haber colocado masas de prueba,
donde esta matriz representa las características dinámicas del sistema.
De acuerdo a Preciado [13], el método de coeficiente de influencia asume una relación lineal entre
la respuesta de vibración y el desbalance del rotor. Esta relación lineal define los coeficientes de
influencia, los cuales representan el efecto sobre la vibración en el mismo punto sobre la flecha a
una velocidad dada, causada por la colocación de una masa en otro (o el mismo) punto a lo largo
del rotor, esta relación se expresa como:
(4.15)
Donde: es el coeficiente de influencia para la vibración medida en la longitud del rotor a una
velocidad , cuando una masa se coloca en .
es el vector que contiene los cambios entre la vibración medida en a una velocidad
, antes y después de colocar una masa en .
es un peso de prueba colocado en .

Asumiendo que la vibración de un rotor se mide con transductores a velocidades de rotación
de la flecha, y que las masas de prueba se colocan en planos de corrección, entonces, la
respuesta al desbalance del rotor se representa por coeficientes de influencia, donde
es el número de lecturas de vibración.
La respuesta al desbalance, se calcula aplicando el principio de superposición, y puede expresarse
por el siguiente sistema de ecuaciones:
(4.16)
Donde:
es la vibración original medida en el transductor a una velocidad . es el desbalance original equivalente para el plano de corrección.
Los desbalances equivalentes representan un arreglo de masas discretas, que si se colocan en
los planos de balanceo, producen una respuesta similar que el desbalance original en el rotor. La
ec. 4.16 en forma matricial esta dada por:
(4.17)
La ecuación anterior es básica del método de coeficientes de influencia y la matriz representa el
comportamiento dinámico del sistema.
Para determinar las masas de corrección se requiere que , por lo tanto, la matriz de
coeficientes de influencia resultante es una matriz cuadrada. Las masas de corrección se
determinan de acuerdo a la siguiente expresión:
(4.18)
Sin embargo, si las vibraciones no disminuirán a cero y deberán aplicarse métodos
alternativos para determinar las masa de corrección.
En términos generales, el método de los coeficientes de influencia, tal como se aplica en la
práctica, requiere de un rodado de prueba por cada plano de balanceo utilizado, lo cual implica que
se emplee mucho tiempo para las actividades de balanceo.
Otra característica de este método, es que no acepta el uso de arreglos de pesos, dado que el
procedimiento para su aplicación requiere de la colocación de pesos individuales plano por plano,
para medir las vibraciones del rotor en los planos de balanceo utilizados.
4.3 BALANCEO MODAL UTILIZANDO COEFICIENTES DE INFLUENCIA
Para calcular las masas de corrección mediante el método de balanceo por coeficientes de
influencia, se deben colocar masas de prueba individuales en cada plano de balanceo para

poder determinar la matriz de coeficientes de influencia y los vectores efecto . La matriz de
coeficientes de influencia de acuerdo a Preciado [13], se determina como:
(4.19)
En la ec. 4.19, se observa que la matriz de coeficientes de influencia representa un sistema de
variables, por lo que se requiere de corridas de prueba para determinarse. Sin embargo, el
procedimiento anterior se puede desarrollar al considerar múltiples masas de prueba, es decir, el
método de coeficientes de influencia generalizado se puede formular a partir de un arreglo de
pesos modales de prueba.
De acuerdo con lo anterior, la ec. 4.16, se puede expresar como:
(4.20)
Entonces, se puede considerar que y son los vectores correspondientes para la
corrida de prueba, de manera que la ec. 4.20 puede expresarse como:
(4.21)
Donde:
es una matriz con elementos iguales a cero, excepto en la columna la cual contiene
los vectores efecto correspondientes a la corrida de prueba.
es una matriz con elementos iguales a cero, excepto en la columna la cual contiene
las masas utilizadas en la corrida de prueba.
De la misma manera, ecuaciones pueden establecerse de acuerdo a las corridas de prueba
realizadas. Entonces, la matriz de vectores efecto puede expresarse como:
(4.22)
Donde:
es una matriz de vectores efecto, donde cada columna corresponde a una corrida de prueba.
es una matriz del arreglo de masas de pruebas, donde cada columna corresponde a una corrida
de prueba.
Por tanto, para el caso en donde el número de planos de balanceo es igual al número de corridas
de prueba, la matriz de coeficientes de influencia puede determinarse por:
(4.23)

Una vez obtenida la matriz de coeficientes de influencia, se procede a calcular las masas de
corrección de acuerdo a la ec. 4.18.
De esta manera, de acuerdo a Preciado y Aguirre [14], un arreglo de pesos modales de prueba
que afecten modos específicos de vibración, puede utilizarse para determinar los pesos de
corrección mediante el método generalizado de coeficientes de influencia.
En este método, un arreglo de pesos de prueba se descompone en arreglos de pesos que afectan,
cada uno, a un modo específico de vibración. La descomposición modal de los pesos de prueba se
puede realizar mediante la extracción de los parámetros modales de la respuesta del rotor, ya sea
experimentalmente o mediante simulación numérica. En la descomposición modal se considera
que la forma modal normalizada del rotor es la misma para cualquier arreglo de pesos que excite
ese modo, de manera que la suma vectorial de los arreglos modales de pesos es igual al arreglo de
pesos de prueba.
Una vez determinados los arreglos de pesos modales, se puede utilizar el método generalizado de
los coeficientes de influencia para varias velocidades críticas del rotor. Por medio de este
procedimiento se pueden reducir las corridas de prueba a solo una, puesto que cada arreglo modal
afecta un modo específico de vibración, y a partir de una sola corrida de prueba se puede identificar
el efecto que cada arreglo modal tiene en el modo correspondiente, lo cual permite la generación
de la matriz de coeficientes de influencia.

C A P I T U L O 5
MODELO MATEMATICO DE UN SISTEMA ROTOR-SOPORTES
En este capítulo se describen las ecuaciones diferenciales de movimiento de un rotor simétrico y
asimétrico con base al método de elemento finito, así mismo, se presenta la solución la cual
permite determinar las frecuencias naturales, formas modales y respuesta al desbalance.
5.1 INTRODUCCION Actualmente los métodos de elemento finito son utilizados exitosamente para resolver problemas
en áreas de la ingeniería, tales como, el análisis de sólidos y estructuras, transferencia de calor y
fluidos, y por supuesto en el área de vibraciones mecánicas, entre otros.
De acuerdo a Bathe [15], el método de elemento finito aplicado a sistemas continuos requiere que
el sistema se divida en un número finito de elementos discretos llamados nodos. Entonces, se
establecen interpolaciones para las variables dependientes a través de cada elemento, esto con el
fin de asegurar la apropiada continuidad entre los elementos. Las funciones de interpolación se
desarrollan en términos de los valores desconocidos de las variables dependientes en puntos
discretos.
La solución de un problema de ingeniería mediante el método de elemento finito, en esencia radica,
en establecer un arreglo de ecuaciones algebraicas gobernantes (modelo matemático) y sus
soluciones.
En el análisis dinámico de sistemas mecánicos, el método de elemento finito se basa en la solución
de las ecuaciones de equilibrio que gobiernan la respuesta dinámica lineal de un sistema de
elementos finitos dada por:
(5.1)
Donde, , , y representan las matrices de masa, amortiguamiento y rigidez,
respectivamente; es el vector de cargas aplicadas, y , y son los vectores de
aceleración, velocidad y desplazamiento.

De acuerdo a Lalane y Ferraris [11], el procedimiento general para obtener la ec. 5.1, es el
siguiente: a) Caracterizar los elementos del sistema de acuerdo a la energía cinética, de deformación y el trabajo
virtual de las fuerzas externas.
b) Aplicar ecuaciones de Lagrange, ec. 5.2, para obtener las
ecuaciones de movimiento cada uno de los elementos.
(5.2)
c) La solución de las ecuaciones de movimiento se obtiene al aplicar las técnicas del método de
elemento finito, resultando en un conjunto de matrices que representan las características dinámicas
de cada uno de los elementos y que son integradas en un sistema matricial global.
5.2 MODELO DE UN SISTEMA ROTOR-SOPORTES CON FLECHA DE SECCION TRANSVERSAL
SIMETRICA
5.2.1 ELEMENTOS FINITOS DEL SISTEMA
5.2.1.1 FLECHA La flecha se considera como una viga con sección transversal simétrica, y es caracterizada por la
energía cinética y de deformación. El elemento finito tipo viga de longitud , tiene dos nodos con
cuatro grados de libertad cada uno, dos desplazamientos , , y dos rotaciones , sobre los ejes
y , respectivamente, tal como se muestra en la Fig. 5.1.
Figura 5.1. Elemento finito de la flecha.
La relaciones entre desplazamientos y rotaciones se puede expresar como:

(5.3)
(5.4)
El vector de desplazamiento nodal se obtiene como:
(5.5)
Los desplazamientos en las direcciones y están dados por:
(5.6)
(5.7)
Al derivar las ec. 5.6 y 5.7 con respecto al tiempo, se obtienen los vectores de velocidad y
aceleración .
El elemento finito se construye a partir de:
(5.8)
(5.9)
Donde, y son las funciones de desplazamiento típicas de una viga en flexión, las
cuales se determinan por:
(5.10)
(5.11)
Entonces, a partir de la ec. 3.5 se obtiene ecuación de la energía cinética de la flecha, la cual se
expresa como:
(5.12)
Sustituyendo las ec. 5.10 y 5.11 en la ec. 5.12, e integrando se obtiene:
(5.13)
Donde, , son las matrices clásicas de masa, , representan la influencia de los efectos
de la inercia rotacional, y son los efectos giroscópicos.
Por otra parte, aplicando la ec. 5.2 a la ec. 5.13; se tiene que:
(5.14)
En la cual, y se obtienen de las matrices , , , y , y la matriz de .

Aquí, representa la matriz de masa consistente para el movimiento de traslación, la cual esta
dada por:
(5.15)
Donde, es la densidad volumétrica del material, es el área de la sección transversal, y es la
longitud de la flecha.
Por su parte, representa la matriz de masa consistente para el movimiento de rotación, la cual
se expresa como:
(5.16)
Donde, es el segundo momento de área del elemento.
Finalmente, presenta la matriz parcial de efectos giroscópicos, la cual esta dada por:
(5.17)
Donde, es la velocidad de rotación.
Por otra parte, a partir de la ec. 3.10 se obtiene la energía de deformación de la flecha, la cual esta
dada por:
(5.18)
Sustituyendo las ec. 5.10 y 5.11 en la ec. 5.18, e integrando se tiene:
(5.19)

Donde, , son las matrices clásicas de rigidez, y , son las matrices a causa de las
fuerzas axiales, respectivamente.
Aplicando las ecuaciones de Lagrange a , de la ec. 5.19, se obtiene:
(5.20)
Donde, presenta la matriz clásica de rigidez de la flecha, la cual se expresa como:
(5.21)
Donde, es el módulo de Young del material, y es el efecto cortante, éste último se determina
como:
(5.22)
Siendo, el modulo de elasticidad transversal y se expresa como:
(5.23)
Donde, es el radio de Poisson.
5.2.1.2 DISCO En un nodo dado del rotor, se tienen cuatro grados de libertad, dos desplazamientos , , y dos
rotaciones , , respectivamente. Entonces, el vector de desplazamiento nodal del centro del
disco se expresa como:
(5.24)
Aplicando las ecuaciones de Lagrange a la ecuación de la energía cinética del disco, ec. 3.4, se
obtiene:
(5.25)
De la cual, representa la matriz de masa del disco, y la matriz de efectos giroscópicos, las
cuales están dadas por:
Matriz de masa:
(5.26)
Matriz de efectos giroscópicos:

(5.27)
5.2.1.3 SOPORTES
Las expresiones de trabajo virtual de los soportes están dadas por las ec. 3.11 y 3.12, las cuales
se pueden expresar como:
(5.28) (5.29)
Como = =0, el vector de fuerzas que actúan sobre la flecha es:
(5.30)
La ec. 5.30 representa los efectos que se presentan en el sistema a causa de un desplazamiento
(fuerza elástica, correspondiente a la primera matriz), y los debidos a la rapidez de cambio de
posición (fuerzas de amortiguamiento, correspondientes a la segunda matriz) en la dirección o .
La rigidez torsional en los soportes se considera nula. 5.2.1.4 MASA DE DESBALANCE
Aplicando las ecuaciones de Lagrange a la ec. 3.16, se obtiene:
(5.31)
El vector de desplazamiento se expresa como:
(5.32)
Las fuerzas producidas por una masa de desbalance situada en la posición angular respecto al
eje , en el tiempo , se expresan como:
(5.33)
Donde , son las fuerzas producidas por el desbalance en los ejes , respectivamente, las
cuales se determinan como:
(5.34)
(5.35)

5.2.2 SOLUCION DE LA ECUACION DE MOVIMIENTO DEL SISTEMA
5.2.2.1 FRECUENCIAS NATURALES Y FORMAS MODALES
Con referencia al sistema de coordenadas fijo , la ecuación diferencial de movimiento del
sistema sin considerar fuerzas externas esta dada por:
(5.36)
Para determinar los valores propios de la ecuación homogénea 5.36, se propone una solución del
tipo exponencial como:
(5.37)
Al sustituir la ec. 5.37, en la ec. 5.36, se obtiene:
(5.38)
Si se considera que , la solución en estado estable de la ec. 5.38 se puede expresar
como:
(5.39)
La ec. 5.39 puede expresarse de acuerdo al problema clásico del eigenvalor como:
(5.40)
Donde:
(5.41)
(5.42)
De la ec. 5.40, se obtienen los valores de las frecuencias naturales (eigenvalores), y formas
modales (eigenvectores), y se expresan respectivamente como:
(5.43)
(5.44)
Los eigenvalores/eigenvectores de las ec. 5.43 y 5.44 son cantidades complejas. Como y son
matrices reales, los eigenvalores se presentan en pares de complejos conjugados, y son de la
forma:
(5.45)
Los eigenvectores correspondientes son:
(5.46)

En la ec. 5.45, las de cada valor propio representan las frecuencias naturales para cada modo
de vibración y los son factores de amortiguamiento modal; si en la ec. 5.45 la parte real es
positiva el sistema se considera inestable.
5.2.2.2 RESPUESTA AL DESBALANCE Con referencia al sistema de coordenadas fijo , la ecuación diferencial de movimiento del
sistema considerando una masa de desbalance se expresa como:
(5.47)
Aplicando las ec. 5.34 y 5.35 a la ec. 5.47, e identificando los términos y se obtiene:
(5.48)
Donde, ) y ) representan el vector de desplazamientos dado por:
(5.49) El sistema de ecuaciones 5.48 se resuelve para los valores correspondientes de la velocidad de
rotación .
5.3 MODELO DE UN SISTEMA ROTOR-SOPORTES CON FLECHA DE SECCION TRANSVERSAL
ASIMETRICA
5.3.1 SISTEMA DE COORDENADAS GENERALIZADAS
De acuerdo a Lalane y Ferraris [11], la característica principal del rotor asimétrico es que cuenta
con una flecha con diferentes valores de rigidez en los ejes de inercia principales de su sección
transversal. Un esquema general de este tipo de rotores se muestra en la Fig. 5.2.

Figura 5.2. Modelo de un rotor asimétrico.
De la Fig. 5.2, es el origen del sistema coordenado fijo y sus componentes son y , es el
origen del sistema coordenado rotatorio y sus componentes son y , respectivamente,
es la masa concentrada de la flecha situada a una distancia de los ejes rotacionales. La rigidez de
la sección transversal de la flecha en las direcciones y , son y , respectivamente. Los
componentes de rigidez de los soportes se consideran en el marco de referencia fijo
. La relación entre ambos marcos de referencia, fijo y rotacional, esta dada por:
(5.50)
Donde, y y , son vectores unitarios, y es la velocidad de rotación.
5.3.2 ENERGIA CINETICA Las coordenadas de se expresan en los dos sistemas de referencia como:
(5.51)
(5.52)
(5.53)
La expresión de la velocidad esta dada por:
(5.54)

(5.55)
La expresión de la energía cinética de la flecha en el sistema coordenado fijo es:
(5.56)
Con respecto al sistema coordenado rotacional se tiene que:
(5.57)
Aplicando las ecuaciones de Lagrange a las ec. 5.56 y 5.57 se tiene:
Sistema coordenado fijo:
(5.58)
(5.59)
Sistema coordenado rotatorio: (5.60)
(5.61)
5.3.3 RIGIDEZ DE LA FLECHA De acuerdo a Inagaki, et al [9], por simplicidad, únicamente se considera el caso en que el eje
neutro de tensión en la sección transversal coincide con los ejes principales del momento de
inercia de masa de la sección transversal asimétrica, tal como se muestra en la Fig. 5.3.
Figura 5.3. Restricciones de la sección asimétrica.
Se considera una sección transversal asimétrica de la flecha, con geométrica como la que se
muestra en la Fig. 5.4.

Figura 5.4. Sección transversal asimétrica.
Los segundos momentos de área se acuerdo con la geometría de la sección asimétrica de la Fig.
5.4, se calculan de acuerdo a las expresiones siguientes:
(5.62)
(5.63)
Donde:
(5.64)
(5.65)
De acuerdo al sistema presentado en la Fig. 5.4, la fuerza actuando sobre la masa se puede
representar como:
(5.66)
Al sustituir la ec. 5.50 en la ec. 5.66, se obtienen los componentes de la fuerza en el sistema de
referencia fijo:
(5.67)
Por tanto, los segundos momentos de área de acuerdo al sistema de referencia fijo son:
(5.68)
(5.69)
(5.70)
La energía de deformación de la flecha se obtiene a partir de la ec. 3.10, y se expresa como:
(5.71)
Donde, , son las matrices clásicas de rigidez, , las matrices a causa de la fuerza
expresada en la ec. 5.67, respectivamente.

Si se aplican las ecuaciones de Lagrange a la ec. 5.71, se obtiene:
(5.72)
Donde, es la matriz de rigidez de la flecha con sección transversal asimétrica, de acuerdo a
Samano [16], en forma matricial se expresa como:
(5.73)
La matriz de la ec. 5.73, es similar a la de una flecha con sección transversal simétrica, ec. 5.21,
sin embargo, en aparecen los segundos momentos de área de una sección asimétrica y ,
más un segundo momento de área a causa del giro de la sección transversal.
5.3.4 SOLUCION DE LA ECUACION DE MOVIMIENTO DEL SISTEMA
5.3.4.1 FRECUENCIAS NATURALES Y FORMAS MODALES
La ecuación diferencial de movimiento del sistema sin considerar fuerzas externas esta dada por:
(5.74)
Donde, el la matriz de rigidez de los soportes.
De forma similar como se realizó en un rotor simétrico, las frecuencias naturales y formas modales
de la ec. 5.74, se determinan de acuerdo al procedimiento descrito en la sección 5.2.2.1, sin
embargo, esta dada por la ec. 5.73.
5.3.4.2 RESPUESTA AL DESBALANCE
La ecuación diferencial de movimiento del sistema al considerar una masa de desbalance es:
(5.75)
De forma similar como se realizó en un rotor simétrico, para calcular la respuesta en estado estable
del sistema representado por la ec. 5.75, se utiliza el mismo procedimiento descrito en la sección
5.2.2.2.

5.3.5 AMORTIGUAMIENTO De acuerdo con Bathe [15], el tratamiento del amortiguamiento en análisis computacionales puede
ser categorizado como un método de amortiguamiento espectral. En éste método el
amortiguamiento viscoso es introducido por medio de fracciones específicas de amortiguamiento
crítico como una función de la frecuencia de rotación, o más comúnmente, una sola fracción de
amortiguamiento para un rango entero de frecuencias de un sistema. Un esquema común de
amortiguamiento espectral es el llamado de Rayleigh o proporcional.
La ventaja de utilizar un método de amortiguamiento espectral es que evita el desarrollo de
modelos detallados para caracterizar mecanismos de disipación de energía (como perdida de
histéresis elástica-plástica, fricción entre juntas estructurales, etc.) que casi siempre resultan en
análisis no- lineales; y por lo tanto, raras veces utilizados.
De acuerdo con Bathe [15], el amortiguamiento se considera en el sistema como una combinación
lineal de las matrices de rigidez y masa para definir la matriz de proporcionalidad del
amortiguamiento:
(5.76)
donde, , son las constantes de amortiguamiento proporcional de rigidez y masa,
respectivamente. La matriz es una matriz de amortiguamiento ortogonal por que permite
desacoplar los modos como eigenvectores los cuales están asociados con los eigenvalores sin
amortiguamiento.
La relación entre , y la fracción de amortiguamiento crítico en la frecuencia está dada por
la siguiente ecuación:
(5.77)
La ec. 5.77 representa el radio de amortiguamiento especifico para cualquier valor de . Las
constantes de amortiguamiento y se determinan de acuerdo a las fracciones de
amortiguamiento crítico seleccionadas, y , a dos diferentes frecuencias, y , las cuales se
expresan como:

(5.78)
(5.79)
En la Fig. 5.5 se muestra un esquema general del comportamiento de la fracción de
amortiguamiento crítico contra la velocidad de rotación.
Figura 5.5. Fracción de amortiguamiento crítico contra frecuencia para amortiguamiento de Rayleigh, también se
muestra la contribución del amortiguamiento proporcional de masa y rigidez al amortiguamiento total.
Usualmente, el espectro de diseño se define al elegir los valores de y , entonces, se
considera como la frecuencia natural mas baja del sistema, y es la frecuencia natural más alta
en el intervalo de análisis.
En el modelo matemático se considera que las características de la estructura del rotor asimétrico
pueden representarse apropiadamente utilizando amortiguamiento proporcional al resolver la
ecuación de movimiento del rotor mediante el método directo.

C A P I T U L O 6
SIMULACION NUMERICA
En el presente capítulo se muestran los resultados obtenidos de la simulación numérica de los
modelos matemáticos que se desarrollaron con el fin de conocer el comportamiento dinámico de
rotores asimétricos. Para la elaboración de los modelos, se utilizó el programa Matlab y fueron
basados en la técnica del método de elemento finito. Para su validación, se compararon los
resultados obtenidos en este trabajo con los presentados en la literatura, tanto para rotores
asimétricos como simétricos. El modelo desarrollado permite obtener las frecuencias naturales en
función de la velocidad de rotación (diagramas de Campbell), velocidades críticas, formas modales,
así como también, los diagramas de respuesta al desbalance en estado estable, (diagrama de
Bode de amplitud y fase, y polares de respuesta).
6.1 ESTRUCTURA GENERAL DE LOS MODELOS
El desarrollo de los modelos matemáticos presentados en el capitulo 4, se realizó con base en el
método de elemento finito y la programación utilizando el programa de Matlab. La estructura
general de los programas es la siguiente: 1. Introducción de las características del rotor:
a. Flecha y discos: longitud, diámetro, módulo de Young, densidad, módulo de elasticidad
transversal, coeficiente del efecto cortante.
b. Soportes: posición, rigidez y amortiguamiento.
c. Desbalance: posición, magnitud, ángulo de fase.
2. Discretización del sistema: especificar el número de nodos de cada elemento.
3. Determinación de las matrices elementales de rigidez, masa, efectos giroscópicos y
amortiguamiento, considerando la posición nodal.
4. Determinación de las matrices globales del sistema mediante el ensamble de las matrices
elementales.
5. Solución de las ecuaciones de movimiento del sistema completo: obtención de las frecuencias
naturales y formas modales o respuesta al desbalance.
6. Graficación de resultados.
6.2 ROTOR SIMETRICO

Para validar el modelo desarrollado, se simuló el comportamiento de un rotor simétrico de dos
grados de libertad presentado por Lalane y Ferraris [11]. La configuración del rotor simulado se
muestra en la Fig. 6.1 y sus características se presentan en la Tabla 6.1,
respectivamente.
Figura 6.1. Configuración del rotor simétrico.
Tabla 6.1. Características del rotor simétrico.
Longitudes (m) L1=0.2; L2=0.3; L3=0.5; L4=0.3 Radio de la flecha (m) 0.05 E (N/m2) 2x1011 ρ (kg/m3) 7800 ν 0.3
Disco D1 D2 D3 Espesor (m) 0.05 0.05 0.06 Radio interno (m) 0.05 0.05 0.05 Radio externo (m) 0.12 0.2 0.2
Soportes 1 y 2 Rigidez (N/m) kxx=5x107 Kyy=7x107 kxy=kyx=0 Amortiguamiento (N/m/s) cxx=5x102 cyy=7x102 cxy=cyx=0 Velocidad de rotación (rpm) 0 a 30 000
El rotor se discretizó en 51 nodos, cada uno con 4 grados de libertad, dos de translación y dos de
rotación. La ecuación de movimiento del sistema rotor-soporte corresponde a la ec. 5.1, y el
tamaño de las matrices es de cuatro veces el número de nodos y contiene todos los grados de
libertad del sistema. Los discos se consideraron como cambios de diámetro de la flecha.
6.2.1 FORMAS MODALES Y DIAGRAMA DE CAMPBELL
El comportamiento dinámico del sistema sin considerar fuerzas externas esta determinado por la
ec. 5.36, cuyos valores y vectores propios (frecuencias naturales y formas modales) se

determinaron de acuerdo a la ec. 5.36. Los resultados obtenidos del modelo se presentan a
continuación.
En la Fig. 6.2 se muestran los dos primeros pares de formas modales del rotor simulado.
Figura 6.2. Primeros dos pares de formas modales.
Las diez frecuencias naturales mas bajas obtenidas en función de la velocidad de rotación, se
muestran en el diagrama de Campbell de la Fig. 6.3. Este diagrama es de gran ayuda en la
detección de posibles causas de resonancia, para ello se grafica la relación , donde es
la velocidad de rotación en rev/min. Las velocidades críticas del sistema corresponden a las
intersecciones de con las frecuencias naturales, para , las velocidades críticas se asocian
al desbalance, esto a causa de que las fuerzas de desbalance son excitaciones síncronas; para
, las intersecciones se relacionan con el desalineamiento.

Figura 6.3. Diagrama de Campbell del rotor simétrico simulado.
En el diagrama de la Fig. 6.3, se observan las diez frecuencias naturales correspondientes a las
primeras cinco formas modales del rotor, de tal manera que, las frecuencias naturales se
presentan en pares, de las cuales una disminuye y otra aumenta, esto es a causa de los efectos
giroscópicos. Las frecuencias naturales disminuyen conforme incrementa la velocidad de rotación,
cuando el rotor describe una orbita circular en sentido contrario del giro de rotación, por el contrario,
las frecuencias naturales aumentan cuando el rotor describe una orbita circular en el mismo sentido
de giro de rotación. Se observa que cuando el rotor no gira, es decir, al inicio del diagrama, las
frecuencias naturales son diferentes, esto a causa de la influencia de la rigidez de los soportes
(ortotrópicos kxx≠kzz).
Las diez primeras frecuencias naturales a 25000 rpm obtenidas del diagrama de Campbell, se
muestran en la Tabla 6.2. Los resultados obtenidos se comparan con los presentados por Lalane y
Ferraris [11]. Se observa que para los modos más bajos se presenta un error máximo del 2%, y el
error se incrementa en los dos últimos modos. Entre los factores que causan variación en los
resultados, se encuentran: el número de nodos considerados para discretizar el modelo, y la forma
de modelar los discos, así como también, el valor de los incrementos de tiempo en la solución de
las ecuaciones. Tabla 6.2. Frecuencias naturales en Hertz a 25,000 rpm.
Frecuencias Naturales
Valor de Referencia
[11]
Resultados modelo
desarrollado % Error

F1 55.40 54.58 -1.4 F2 67.20 68.52 1.9 F3 157.90 154.74 -2.0 F4 193.71 197.52 1.9 F5 249.90 244.69 -2.0 F6 407.62 415.00 1.8 F7 446.62 456.25 2.1 F8 715.03 750.44 4.9 F9 622.65 618.52 -0.6
F10 1093.0 1138.0 4.1
6.2.2 RESPUESTA AL DESBALANCE
El comportamiento dinámico del sistema al considerar fuerzas externas esta dada por la ec. 5.47,
cuyas soluciones se obtuvieron mediante el método directo dado por la ec. 5.48. Para el modelo,
se consideró un desbalance de 0.002 kg.m en una posición angular de 45° en el disco No. 2. Los
diagramas de Bode de amplitud y polar de respuesta se obtuvieron al considerar un transductor en
el nodo 22.
En la Fig. 6.4, se muestra el diagrama de Bode de amplitud, el cual representa las amplitudes de
los desplazamientos del centro geométrico del rotor como una función de la velocidad de rotación.
En este diagrama se puede apreciar que en el intervalo de velocidades analizado, se encuentran
siete velocidades críticas.
Figura 6.4. Respuesta al desbalance del rotor simulado.

En la Tabla 6.3, se presentan las primeras siete velocidades críticas obtenidas del diagrama de
Campbell de la Fig. 6.3 al graficar la relación , así como también, las velocidades críticas y
amplitudes obtenidas del diagrama de Bode de amplitud de la Fig. 6.4. Tabla 6.3. Velocidades críticas y desplazamientos del rotor simétrico.
Velocidad critica
Diagrama de Campbell
Diagrama de Bode
% Error
C1 3636 3636 0.763x10-3
0.0
C2 3840 3840 0.173x10-2
0.0
C3 9900 9900 0.473x10-4
0.0
C4 11392 11393 0.105x10-3
0.008
C5 15784 15797 0.356x10-5
0.082
C6 25155 25162 0.785x10-4
0.027
C7 27153 27157 0.384x10-4
0.014
De los resultados presentados en la Tabla 6.3, se observa un error máximo de 0.082% entre las
frecuencias críticas identificadas en el diagrama de Campbell y las obtenidas en el diagrama de
Bode de amplitud, lo cual demuestra que el modelo desarrollado proporciona una aproximación
confiable, tanto para determinar las frecuencias naturales como para la respuesta al desbalance de
sistemas rotor-soportes.
6.3 ROTOR ASIMETRICO
Una vez validado el modelo para un rotor simétrico, se procedió a modelar el rotor asimétrico
presentado por Inagaki et al [9]. La configuración y características del rotor se muestran en la Fig.
6.5 y en la Tabla 6.4, respectivamente.

Figura 6.5. Configuración del rotor asimétrico.
Tabla 6.4. Características del rotor asimétrico. Flecha
Longitudes, L, (m) L1=0.025; L2=0.11; L3=0.055; L4=0.1; L5=0.055; L6=0.11; L7=0.025
Radio de la flecha (m) 0.05 E (N/m2)= 2x1011
ρ (kg/m3)= 7800 ν=0.3
Modulo de corte, G, (kg/m2)
1x106
Asimetría, σ 0.177 Discos D1 D2
Espesor (m) 0.02 0.02 Radio interno (m) 0.006 0.006 Radio externo (m) 0.1 0.1
Soportes Rigidez, k, (N/m) kxx=12.5x103 kzz=12.5x103
Amortiguamiento, c, (N/m/s) cxx=3.8x103 czz=3.8x103 El sistema se discretizó en 49 nodos, cada uno con cuatro grados de libertad, dos de traslación y dos de
rotación. En el modelo se consideran los efectos giroscópicos y los efectos cortantes, así mismo, se
consideró un diámetro equivalente de 0.01060 m en la longitud L4, esto con el fin de considerar la masa
adecuada correspondiente a la sección asimétrica. Las propiedades de los discos se concentraron en los
nodos 14 y 36.
6.3.1 FORMAS MODALES Y DIAGRAMA DE CAMPBELL

El comportamiento dinámico del sistema sin considerar fuerzas externas esta dada por la ec. 5.74,
los valores y vectores propios se determinan de acuerdo con la ec. 5.40.
Las dos primeras formas modales en la dirección se muestran en la Fig. 6.6.
Figura 6.6. Formas modales del rotor asimétrico.
Las frecuencias naturales del rotor sin considerar amortiguamiento viscoso fueron calculadas como
una función de la velocidad de rotación, las cuales se muestran en el diagrama de Campbell de la
Fig. 6.7. Las velocidades críticas al considerar una fuerza de desbalance, se obtienen del diagrama
de Campbell al graficar la relación , donde es la velocidad de rotación en rpm y para el
caso de desbalance .
Figura 6.7. Diagrama de Campbell del rotor asimétrico.
En la Fig. 6.7, se muestran las primeras cuatro frecuencias naturales correspondientes a las
primeras dos formas modales del rotor. Se aprecia que las frecuencias naturales se presentan en
pares, de las cuales una disminuye y una aumenta, esto se debe a los efectos giroscópicos. Se

observa que cuando el rotor no gira, es decir, al inicio del diagrama, las frecuencias naturales son
iguales, esto a causa de la influencia de la rigidez de los soportes (isotrópicos kxx= kzz).
En la Tabla 6.5, se comparan los resultados obtenidos con los valores presentados por Inagaki et al
[9]. Estos valores corresponden a las velocidades críticas a causa de los dos ejes principales de
rigidez, así como la asimetría modal del rotor sin considerar amortiguamiento. Tabla 6.5. Velocidades criticas del rotor asimétrico sin considerar amortiguamiento.
Modo 1 Modo 2
Resultados
Velocidad critica
(rpm)
Asimetría
modal
Velocidad critica
(rpm)
Asimetría
modal
Modelo 1864 1691 0.0485 4550 4511 0.0043
Referencia
[22] 1846 1673 0.0489 4443 4403 0.0045
% Error 0.97 1.0 0.81 2.4 2.4 4.4
En la Tabla 6.5, y corresponden a las frecuencias naturales a causa de la rigidez máxima y
minina, respectivamente, y la asimetría modal se calculó de acuerdo a siguiente ecuación:
6.1
De los resultados presentados en la Tabla 6.5, se puede apreciar que para el segundo modo se
presenta un error mayor entre los resultados obtenidos de la simulación y los de la referencia.
Entre los factores que causan variación en los resultados son:
• La diferencia entre los métodos utilizados, en el caso de la referencia, el modelo fue formulado con
base al método de la matriz de transferencia y las soluciones de las ecuaciones de movimiento
fueron obtenidas mediante el método de balance armónico.
• El número de nodos considerados para la discretización de cada uno de los modelos.
• Los intervalos de tiempo utilizados en la solución de las ecuaciones.
6.3.2 RESPUESTA AL DESBALANCE
Para la obtención de los diagramas de respuesta al desbalance del rotor, se utilizó la ecuación de
movimiento considerando fuerzas externas, ec. 5.75. Las soluciones se obtuvieron mediante el
método directo de acuerdo a la ec. 5.48. Así mismo, se considero amortiguamiento viscoso dado
por la ec. 5.76.

Los parámetros del espectro de amortiguamiento viscoso considerado en el modelo se muestran en
la Tabla 6.6, y su gráfica en la Fig. 6.8. Tabla 6.6. Parámetros del espectro de amortiguamiento proporcional.
Fracciones de amortiguamiento
critico
Velocidad de rotación
(rpm)
En la Fig. 6.8, se observa como el amortiguamiento atribuible a aumenta y disminuye de
acuerdo al incremento de la velocidad de rotación.
Figura 6.8. Fracción de amortiguamiento crítico contra velocidad de rotación.
Se consideró un desbalance en el disco No. 1 de 0.001 kg.cm en diferentes posiciones angulares, y
los diagramas de respuesta fueron obtenidos por un transductor considerado en el nodo No. 14 en
la dirección del eje X.
En la Fig. 6.9, se presentan los diagramas de Bode de amplitud al considerar el desbalance en las
posiciones angulares de 0°, 45°, 90° y 315°. Como referencia se consideró el comportamiento de
un rotor simétrico con el desbalance en la posición angular de 45°. Así mismo, en la Fig. 6.10 se
muestran los diagramas polares de respuesta correspondientes al desbalance colocado en cada
una de las posiciones angulares ya mencionadas. Los diagramas de las Figuras 6.9 y 6.10
corresponden a las respuestas del rotor simulado en la primera velocidad crítica.
En la Fig. 6.11, se muestran los diagramas polares de respuesta obtenidos para la segunda
velocidad crítica, considerando el desbalance únicamente en las posiciones angulares de 45° y

315°. Como referencia se presentan los diagramas polares de respuesta correspondientes a un
rotor simétrico con desbalance en las mismas posiciones angulares.
Figura 6.9. Diagramas de Bode de amplitud correspondientes a la primera velocidad crítica.
Figura 6.10. Diagramas polares de respuesta correspondientes a la primera velocidad crítica.

Figura 6.11. Diagramas polares de respuesta correspondientes a la segunda velocidad crítica.
Por otra parte, en las Figuras 6.12 y 6.13 se presentan los diagramas de Bode de amplitud y
diagramas polares de respuesta, respectivamente, de la primera velocidad crítica del mismo rotor
obtenidos por Inagaki et al [9]. Así mismo, los diagramas polares de respuesta correspondientes a
la segunda velocidad crítica se muestran en la Fig. 6.14.
Figura 6.12. Diagramas de Bode de amplitud correspondientes a la primera velocidad crítica [9].
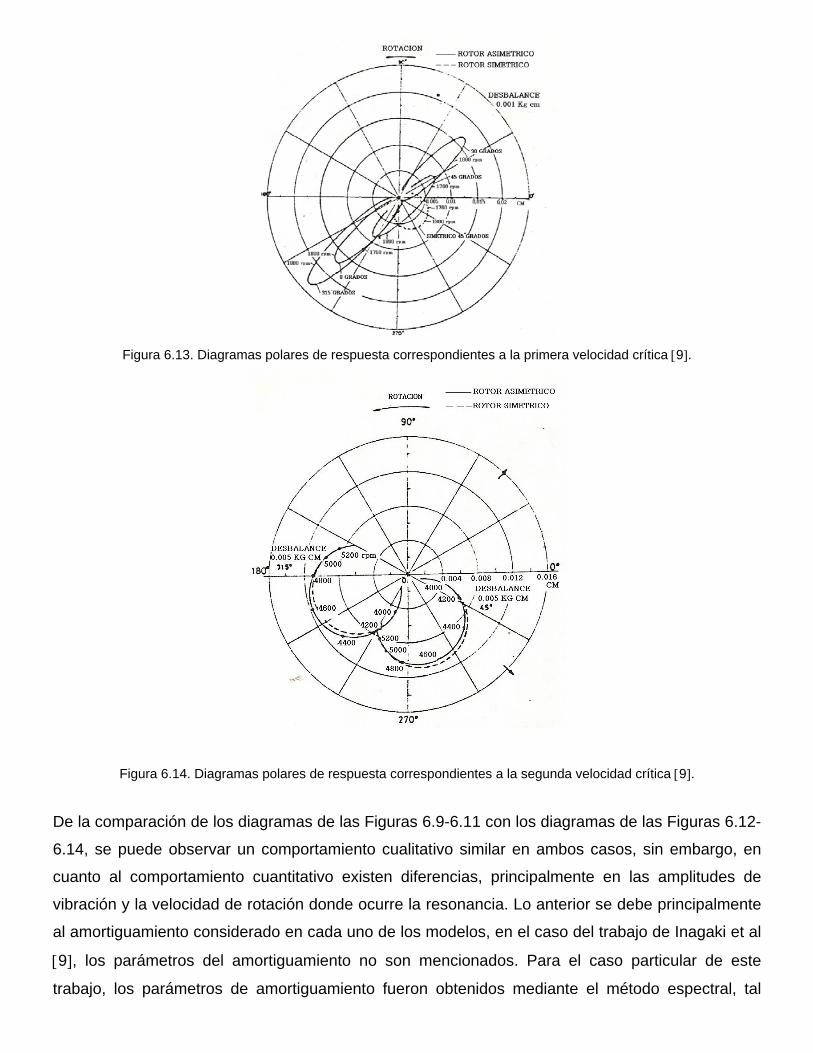
Figura 6.13. Diagramas polares de respuesta correspondientes a la primera velocidad crítica [9].
Figura 6.14. Diagramas polares de respuesta correspondientes a la segunda velocidad crítica [9].
De la comparación de los diagramas de las Figuras 6.9-6.11 con los diagramas de las Figuras 6.12-
6.14, se puede observar un comportamiento cualitativo similar en ambos casos, sin embargo, en
cuanto al comportamiento cuantitativo existen diferencias, principalmente en las amplitudes de
vibración y la velocidad de rotación donde ocurre la resonancia. Lo anterior se debe principalmente
al amortiguamiento considerado en cada uno de los modelos, en el caso del trabajo de Inagaki et al
[9], los parámetros del amortiguamiento no son mencionados. Para el caso particular de este
trabajo, los parámetros de amortiguamiento fueron obtenidos mediante el método espectral, tal

como se muestra en la Fig. 6.8. Así mismo, la magnitud del desbalance considerado en este trabajo
es de 0.001 kg.cm para las dos velocidades críticas, en el caso del trabajo de Inagaki et al [9], el
desbalance es de 0.001 kg.cm y 0.005 kg.cm, para la primera y segunda velocidad crítica,
respectivamente. De acuerdo con lo anterior, se considera que el modelo desarrollado permite una
confiable aproximación del comportamiento dinámico de rotores asimétricos.
Con base a los resultados obtenidos de las simulaciones realizadas en este capítulo, se concluye
que los modelos desarrollados permiten una estimación confiable del comportamiento dinámico,
tanto para rotores simétricos como asimétricos.

C A P I T U L O 7
COMPORTAMIENTO DINAMICO DE LOS ROTORES ASIMETRICOS
En el presente capítulo, se describen las características más importantes que presenta el
comportamiento dinámico de los rotores asimétricos, tomando como base los diagramas polares de
respuesta obtenidos de la simulación numérica.
7.1 CARACTERISTICAS DEL COMPORTAMIENTO DINAMICO DE LOS ROTORES
ASIMETRICOS
7.1.1 CARACTERISTICAS GENERALES
1. De acuerdo a Taylor [2], Bishop y Parkinson [3], y Colin [10], entre otros, se comprobó que los
diagramas polares de respuesta son de forma elíptica y se encuentran orientados en los ejes de
, tal como se muestra en la Fig. 7.1.
Figura 7.1. Diagramas polares característicos de un rotor asimétrico.
Así mismo, que el comportamiento dinámico de los rotores asimétricos depende de la relación entre
el factor de asimetría y el amortiguamiento del sistema , donde si se presenta inestabilidad
en la zona de resonancia.

2. En función de los valores de asimetría y amortiguamiento , los diagramas polares de respuesta
cambian de forma geométrica, tal como se muestra en la Fig. 7.2. Esto también fue reportado por
Parkinson [4].
Figura 7.2. Forma geométrica de los diagramas polares de acuerdo a la relación .
3. De acuerdo con Taylor [2], se verificó que los diagramas polares de respuesta presentan cambios en
la amplitud y fase de la respuesta, al considerar diferentes posiciones angulares para una fuerza de
excitación constante, ver Fig. 7.1.
De la Fig. 7.1, se puede apreciar que si el desbalance se encuentra en una posición angular de 315°
ó 135°, se presenta una respuesta de amplitud máxima, en contraste, si el desbalance se encuentra
en la posición angular de 45° ó 225° se presenta una respuesta de amplitud mínima. Para estos dos
casos particulares, la respuesta en condiciones de resonancia se atrasa 90° con respecto a la
excitación.

4. De acuerdo a lo reportado por Inagaki, et al [9], se comprobó que los diagramas polares de respuesta
de un rotor asimétrico son de forma elíptica y estos se encuentran orientados en los ejes de , ver
Fig. 6.10. Sin embargo, en función de la relación del amortiguamiento y la asimetría modal, los
diagramas polares de respuesta para el segundo modo de vibración, son similares a los diagramas
polares de respuesta correspondiente a un rotor simétrico, ver Fig. 6.11.
7.1.2 EVOLUCION DE LOS DIAGRAMAS POLARES DE RESPUESTA EN FUNCION DE LA POSICION ANGULAR DE LA FUERZA DE EXCITACIÓN
A continuación se muestra el comportamiento de un rotor asimétrico con un desbalance constante en
diferentes posiciones angulares de la sección transversal. Se analizaron cuatro intervalos diferentes que son:
315° a 0°, 0° a 45°, 45° a 90°, 90° a 135°, en cada uno de los intervalos anteriores, la variación de la
posición angular del desbalance fue de 5° grados. Para el análisis, se tomaron como referencia los
diagramas polares de respuesta cuando la excitación se encuentra en las posiciones angulares de 315° ó
135°, 45 ó 225°. Esto se debe, a que cuando el desbalance se encuentra en la posición angular de 315° 0
135°, la amplitud de la respuesta es máxima y cuando el desbalance se encuentra en la posición angular de
45° o 225° la amplitud de la respuesta es mínima, particularmente para estos dos casos, la respuesta del
rotor en condiciones de resonancia se atrasa 90° con respecto a la excitación, tal y como sucede en un rotor
simétrico.
a) Fuerza de excitación en los intervalos de 315° a 0° y 135° a 180°.
En la Fig. 7.3, se muestra la evolución de los diagramas polares de respuesta de un rotor asimétrico, en
el intervalo de 315° a 0° y 135° a 180°. En la figura se puede apreciar que el diagrama polar de
respuesta correspondiente a una excitación en una posición angular de 315° presenta una amplitud de
respuesta máxima, donde el punto de amplitud máxima (eje mayor de la elipse) corresponde a la
frecuencia natural dada por y está orientado aproximadamente a 45°. Para este
caso en particular, la respuesta del rotor en condiciones de resonancia se atrasa 90° con respecto a la
excitación. Por otra parte, conforme se varia la posición angular del desbalance de 315° a 0°, la
respuesta del rotor en condiciones de resonancia, presenta un atraso menor de 90° con respecto a la
excitación y la amplitud máxima (eje mayor de la elipse) de la respuesta del rotor disminuye, al mismo
tiempo ésta se desplaza hacia la izquierda, ésto tomando como referencia el eje de 45°. Un
comportamiento similar, se puede observar en los diagramas polares de respuesta en el intervalo de
135° a 180°, en este caso tomando como referencia el eje de 225°.

Figura 7.3. Diagramas polares de respuesta con la fuerza de excitación en los intervalos de 315° a 0° y 135° a 180°, el
eje de rigidez máxima de la flecha y la posición del transductor coinciden con la línea de cero grados del diagrama.
b) Fuerza de excitación en los intervalos de 0° a 45° y 180° a 225°.
En la Fig. 7.4, se muestra la evolución de los diagramas polares de respuesta de un rotor asimétrico, en
el intervalo de 0° a 45° y 180° a 225°. En la figura se puede apreciar que conforme se varía la posición
angular del desbalance en el intervalo de 0° a 45°, la respuesta máxima del rotor (eje mayor de la elipse)
disminuye y se desplaza hacia la izquierda, esto tomando como referencia el eje de 45°. Así mismo, la
respuesta del rotor en condiciones de resonancia presenta un atraso menor de 90°
con respecto a la excitación, excepto para el caso donde la posición angular del desbalance es de 45°,
donde la respuesta se atrasa 90°, particularmente para esta posición angular se presenta una respuesta
del rotor mínima y el diagrama polar de respuesta se encuentra distribuido de manera simétrica en los
tres primeros cuadrantes del sistema de coordenadas polares. Un comportamiento similar, se puede
observar en los diagramas polares de respuesta en el intervalo de 180° a 225°.

Figura 7.4. Diagramas polares de respuesta con la fuerza de excitación en los intervalos de 0° a 45° y 180° a 225°,
el eje de rigidez máxima de la flecha y la posición del transductor coinciden con la línea de cero grados del
diagrama.
c) Fuerza de excitación en los intervalos de 45° a 90° y 225° a 270°.
En la Fig. 7.5, se muestra la evolución de los diagramas polares de respuesta de un rotor
asimétrico, en el intervalo de 45° a 90° y 225° a 270°. En la figura se puede apreciar que cuando el
desbalance tiene una posición angular de 45° grados, la respuesta del rotor es mínima y esta en
condiciones de resonancia, por lo que se atrasa 90° con respecto a la excitación. Así mismo,
conforme se varía la posición angular del desbalance de 45° a 90°, la respuesta del rotor en
condiciones de resonancia presenta un atraso mayor de 90° con respecto a la excitación, y la
amplitud máxima (eje mayor de la elipse) de la respuesta del rotor se incrementa y se aproxima por
la derecha al eje de 225°, eje que se considera como referencia. Un comportamiento similar, se
puede observar en los diagramas polares de respuesta en el intervalo de 225° a 270°, en este caso
tomando como referencia el eje de 45°.

Figura 7.5. Diagramas polares de respuesta con la fuerza de excitación en los intervalos de 0° a 45° y 180° a 225°, el
eje de rigidez máxima de la flecha y la posición del transductor coinciden con la línea de cero grados del diagrama.
d) Fuerza de excitación en los intervalos de 90° a 135° y 270° a 315°.
En la Fig. 7.6, se muestra la evolución de los diagramas polares de respuesta de un rotor
asimétrico, en el intervalo de 90° a 135° y 270° a 315°. En la figura se puede apreciar que conforme
se varía la posición angular del desbalance de 90° a 135°, la amplitud máxima de la respuesta del
rotor (eje mayor de la elipse) se incrementa y se aproxima por la derecha hasta llegar al eje de
225°, eje considerado como referencia.
Así mismo, la respuesta del rotor en condiciones de resonancia presenta un
atraso mayor de 90° con respecto a la excitación, excepto para el caso donde la posición angular
del desbalance es de 135°, donde la respuesta del rotor en condiciones de resonancia se atrasa
90° con respecto a la excitación, particularmente para este caso, la respuesta del rotor es máxima y
coincide con el eje de 225°. Un comportamiento similar, se puede observar en los diagramas
polares de respuesta en el intervalo de 270° a 315°, en este caso tomando como referencia el eje
de 45° grados.

Figura 7.6. Diagramas polares de respuesta con la fuerza de excitación en los intervalos de 90° a 135° y 270° a
315°, el eje de rigidez máxima de la flecha y la posición del transductor coinciden con la línea de cero grados del
diagrama.
Con base al análisis de la evolución de los diagramas polares de respuesta, se propone un criterio
de localización de la fuerza de excitación de acuerdo a la orientación de los diagramas polares de
repuesta, sin embargo, se debe tener en cuenta que ésta orientación puede variar en función del
amortiguamiento y de la asimetría del rotor.
7.1.3 DESCOMPOSICION DE LA FUERZA DE EXCITACION EN LOS EJES ORIENTADOS A
De acuerdo con las características que presentan los diagramas polares de respuesta descritas en
los incisos anteriores, principalmente en los ejes de , se demostró que la respuesta dinámica
para una excitación en cualquier posición angular del rotor, es exactamente la misma, si la masa de
desbalance se distribuye en los ejes de y se realiza una suma vectorial de la respuesta
obtenida a causa de los componentes de masa colocados en cada uno de los ejes mencionados.
Considérese de forma arbitraria una masa de desbalance de gramos colocado en la posición
angular de 11°. En la Fig. 7.7 se muestra el diagrama polar de respuesta generado por el
desbalance , aquí el sentido de rotación del rotor es en sentido horario y la respuesta se atrasa
en sentido contrario.

Figura 7.7. Diagrama polar de respuesta generado por el desbalance , el eje de rigidez máxima de la flecha y la
posición del transductor coinciden con la línea de cero grados del diagrama.
Si se distribuye la masa de en los ejes de , tal como se muestra en la Fig. 7.8, los
componentes de masa obtenidos para el eje de es de y para el eje de es de ,
por lo tanto se tiene que y .
DD Figura 7.8. Descomposición del vector desbalance respecto a los ejes orientados a .
De acuerdo con la distribución de masa realizada, se obtienen los diagramas polares de respuesta
correspondientes en cada eje. En la Fig. 7.9, se muestra como la masa genera una respuesta
, y como la masa genera una respuesta , ambas en condiciones de resonancia.
Adicionalmente se muestra la respuesta generada por la masa .

Figura 7.9. Diagramas polares de respuesta generados por el desbalance y las componentes de desbalance y
, el eje de rigidez máxima de la flecha y la posición del transductor coinciden con la línea de cero grados del
diagrama.
Si se considera la respuesta generada por y en condiciones de resonancia y a la misma velocidad de
rotación, los vectores de vibración son y , respectivamente. Si se
realiza la suma vectorial de y se obtiene un vector de vibración resultante de vibración
.
Por otra parte, si se mide la respuesta a la misma velocidad de rotación, se obtiene que
, respuesta que es la misma que . De esta manera, al realizar la suma vectorial punto
por punto de la respuesta y , se obtiene la respuesta la cual fue generada por el desbalance
en la Fig. 7.7.
Del análisis anterior, se concluye que si se caracteriza la sensibilidad al desbalance del rotor en los ejes de
se puede encontrar un arreglo de pesos de corrección para balancear el sistema.

C A P I T U L O 8
METODO DE BALANCEO PROPUESTO
En este capítulo se propone un método de balanceo para rotores asimétricos utilizando arreglo de
pesos modales. El método aquí propuesto es empleado en el balanceo de un rotor asimétrico de
manera numérica, esto con la finalidad de comprobar su aplicación. 8.1 INTRODUCCION
El método de balanceo modal para rotores flexibles ha sido teóricamente establecido por
Parkinson [4] y Matsukura [7], entre otros. En estos métodos el propósito es completar el balanceo
mediante una única compensación de balanceo.
En el caso de los rotores simétricos, estos métodos han sido ampliamente utilizados en la práctica,
obteniéndose resultados satisfactorios. Sin embargo, en el caso de los rotores asimétricos, los
métodos de balanceo son escasos y en su mayoría complejos, esto principalmente a causa de que
la posición angular del desbalance afecta no solamente la fase de la respuesta de vibración con
respecto a la fuerza de excitación, sino también las amplitudes, además, de la dificultad de
determinar la posición angular de la fuerza de desbalance.
8.2 METODO DE BALANCEO PROPUESTO
De acuerdo al análisis sobre el comportamiento que presentan los rotores asimétricos, descrito en
el Capítulo 7, se propone un método de balanceo para rotores asimétricos, el cual se basa en la
teoría de análisis modal y coeficientes de influencia. En este procedimiento se considera el efecto
que tiene la fuerza de desbalance en las posiciones angulares de , y es factible únicamente en
los casos en donde el número de modos que se deseen balancear es igual al número de planos de
balanceo del rotor.
A continuación se describe el procedimiento general del método propuesto para el balanceo de un
rotor asimétrico:

1) Obtener los diagramas polares de respuesta de los modos de vibración a balancear en los
planos de balanceo ubicados en la longitud del rotor.
2) Medir en los diagramas polares de respuesta, las vibraciones iníciales . Así mismo, determinar la
posición angular de la fuerza de excitación.
3) Determinar los factores modales .
4) Determinar el arreglo de pesos modales de prueba, destinado a balancear los modos del rotor en
forma simultánea. El arreglo de pesos puede expresarse como:
(8.1)
Donde:
Peso para el modo colocado en el plano .
Factor de forma modal del plano para el modo .
Es la resultante de la sumatoria de los pesos modales colocado en el plano de balanceo .
Varían de 1 a , donde es el número de modos considerados para balancear.
5) Colocar el arreglo de pesos modales obtenido de la ec. 8.1 en los planos de balanceo del rotor.
6) Medir las vibraciones residuales después de colocar el arreglo de pesos.
7) Calcular los pesos de corrección con respecto a las posiciones angulares de de acuerdo a lo
siguiente:
a) Calcular los vectores efecto:
(8.4)
b) Calcular los componentes de los vectores efecto y de los pesos , respecto a los ejes , los
cuales están orientados a , tal como se muestra en la Fig. 8.1.

Figura 8.1. Sistema coordenado de los ejes y .
De la descomposición del vector sobre los ejes E y H, resultan las componentes y ,
respectivamente, tal como se muestra en la Fig. 8.2.
Figura 8.2. Descomposición del vector sobre los ejes E y H.
De la misma manera, y resultan de la descomposición de sobre los ejes E y H, tal
como se muestra en la Fig. 8.3.
Figura 8.3. Descomposición del vector sobre los ejes E y H.
c) Determinar la matriz de coeficientes de influencia para los ejes y , respectivamente, de
acuerdo a la ec. 4.23 se expresan como:
(8.5)

d) Los pesos de corrección se determinan de acuerdo a la ec. 4.18 como:
(8.6)
Donde los vectores de vibración inicial y se obtienen de la descomposición de
sobre los ejes y , respectivamente.
e) El arreglo de pesos modales se obtiene al sumar de manera vectorial los pesos obtenidos en la ec.
8.6, en cada plano de balanceo para cada modo de vibración .
8) Colocar el arreglo de pesos modales de corrección en el rotor.
9) Medir las vibraciones residuales después de colocar el arreglo de pesos. Si las mediciones
obtenidas cumplen con los límites permisibles de vibración, entonces el proceso de balanceo finaliza, de
lo contrario, se deben determinar los pesos de corrección adecuados, para esto se pueden considerar
los pesos de corrección como pesos de prueba y repetir el proceso a partir del inciso 7, o bien,
considerar los coeficientes de influencia generados por los pesos de prueba y repetir el proceso a partir
del inciso 7c.
8.3 BALANCEO DE UN ROTOR ASIMETRICO Con el propósito de verificar el método de balanceo descrito previamente, se llevo acabo el
balanceo de los dos primeros modos de vibración de dos rotores asimétricos, para esto se
consideraron diferentes factores de asimetría y amortiguamiento, así mismo, se varió la magnitud y
posición tanto angular como longitudinal del desbalance inicial en cada caso. Para lo anterior, se
utilizó el modelo matemático descrito en el Capítulo 5, sección 5.3. 8.3.1 CASO 1
La configuración y las características del rotor a balancear se presentan en la Fig. 8.4 y la Tabla
8.1.
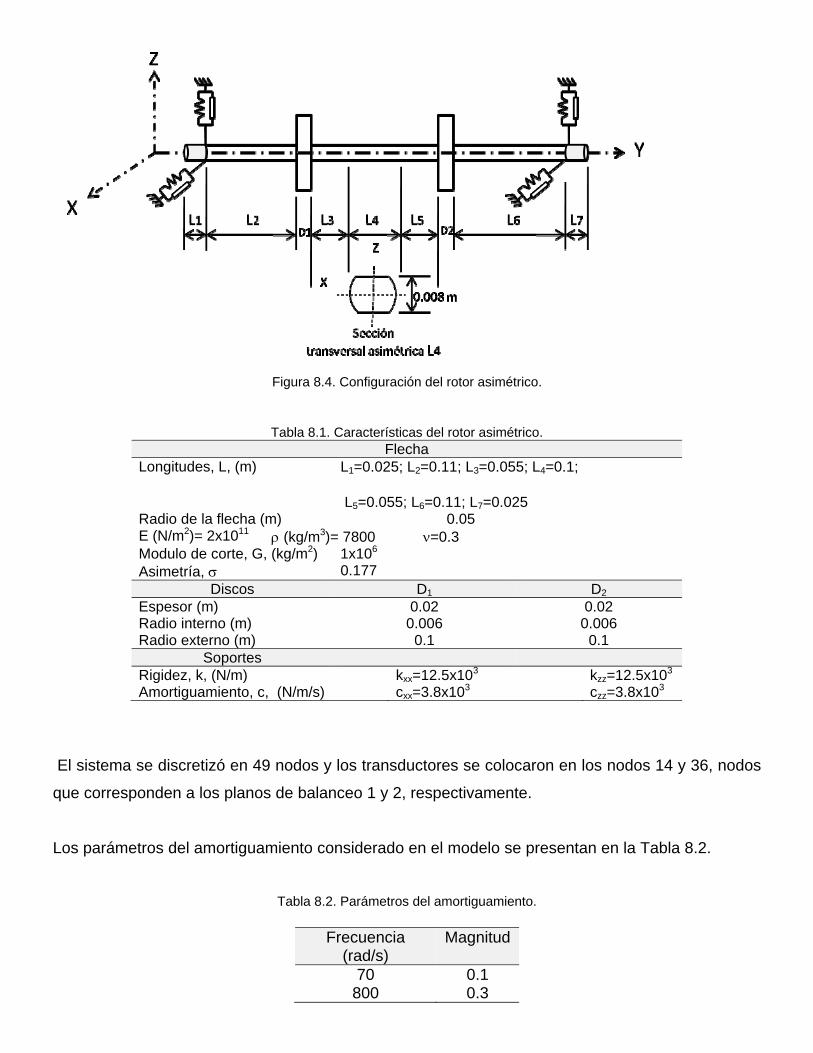
Figura 8.4. Configuración del rotor asimétrico.
Tabla 8.1. Características del rotor asimétrico.
Flecha Longitudes, L, (m) L1=0.025; L2=0.11; L3=0.055; L4=0.1;
L5=0.055; L6=0.11; L7=0.025 Radio de la flecha (m) 0.05 E (N/m2)= 2x1011 ρ (kg/m3)= 7800 ν=0.3 Modulo de corte, G, (kg/m2) 1x106 Asimetría, σ 0.177
Discos D1 D2 Espesor (m) 0.02 0.02 Radio interno (m) 0.006 0.006 Radio externo (m) 0.1 0.1
Soportes Rigidez, k, (N/m) kxx=12.5x103 kzz=12.5x103 Amortiguamiento, c, (N/m/s) cxx=3.8x103 czz=3.8x103
El sistema se discretizó en 49 nodos y los transductores se colocaron en los nodos 14 y 36, nodos
que corresponden a los planos de balanceo 1 y 2, respectivamente.
Los parámetros del amortiguamiento considerado en el modelo se presentan en la Tabla 8.2.
Tabla 8.2. Parámetros del amortiguamiento.
Frecuencia
(rad/s) Magnitud
70 0.1 800 0.3

Los valores del desbalance inicial se eligieron arbitrariamente, éstos se muestran en la Tabla 8.3.
Tabla 8.3. Desbalance inicial.
Nodo Magnitud Fase
6 0.0001125 kg.m
233 °
18 0.00009 kg.m 66° 33 0.000075 kg.m 111°
En las Figuras 8.5 y 8.6, se muestran los diagramas polares de respuesta de los dos primeros
modos obtenidos mediante los transductores 1 y 2 en la dirección X, respectivamente.
Figura 8.5. Diagrama polar de respuesta, transductor 1, dirección X.
hhhhhhhhhhhhhhhhhhhhhhhhh

Figura 8.6. Diagrama polar de respuesta, transductor 2, dirección X.
En los diagramas polares de respuesta de las Fig. 8.5 y 8.6, se identificaron los vectores de
vibración iníciales (amplitud máxima) de cada modo de vibración, éstos se presentan en la Tabla
8.4. Tabla 8.4. Vectores de vibración iníciales.
Plano Primer modo Segundo modo 1 2
La posición angular del desbalance para el primer modo de vibración, se determinó de acuerdo al
análisis de la sección 7.1.2, Capítulo 7,mientras que la posición angular del desbalance del
segundo modo de vibración, se determinó considerando las características de un diagrama polar de
respuesta de un rotor simétrico.
De acuerdo con lo anterior, en la Tabla 8.5 se presentan las posiciones angulares del desbalance.
Tabla 8.5. Posición angular de la fuerza de desbalance.
Plano Primer modo Segundo modo
1 2
Se debe tener en cuenta, que resultara inevitable introducir errores en el proceso de balanceo al
considerar los criterios anteriores, sin embargo, ya se ha mencionado la dificultad que presenta la
respuesta de los rotores asimétricos para localizar la posición angular del desbalance.

En función de las magnitudes de los vectores de vibración de la Tabla 8.4, se determinaron las
proporciones entre los planos de balanceo 1 y 2 para cada uno de los modos de vibración. Por
tanto, los factores de forma modal obtenidos, se muestran en la Tabla 8.6. Tabla 8.6. Factores de forma modal.
Plano Primer modo Segundo modo 1 2
El arreglo de pesos modales para balancear los dos primeros modos de vibración, se obtiene de
acuerdo a la ec. 8.1. Para la solución del sistema de ecuaciones se propone un peso de prueba de
5 gramos para el primer modo, y 4 gramos para el segundo modo.
Para balancear el primer modo de vibración sin afectar al segundo modo se tiene que:
(8.7)
Para balancear el segundo modo de vibración, sin afectar al primer modo se tiene que:
(8.8)
Resolviendo los sistemas de ecuaciones anteriores, se obtiene la distribución de pesos de prueba que se
presenta en la Tabla 8.7.
Tabla 8.7. Pesos de prueba. Plano Primer modo Segundo modo
1
2
El arreglo de pesos modales de prueba, se obtiene de la suma vectorial de los pesos de los dos modos de
vibración en cada plano de balanceo, este se presenta en la Tabla 8.8.
Tabla 8.8. Arreglo de pesos modales de prueba. Plano 1 Plano 2
Posterior a la colocación del arreglo de pesos modales de prueba, se obtuvieron los diagramas polares de
respuesta en los planos de balanceo, Fig. 8.7 y 8.8.

Figura 8.7. Diagrama polar de respuesta, transductor 1, dirección X.
DDDDDDDD ddddddddddddddd
Figura 8.8. Diagrama polar de respuesta, transductor 2, dirección X.
Del análisis de los diagramas polares de respuesta de las Fig. 8.7 y 8.8, se aprecia que los pesos
de balanceo propuestos para cada modo de vibración exceden la cantidad requerida para
balancear cada uno de estos modos, la respuesta posterior a la colocación del arreglo de pesos

modales de prueba, se desfasó aproximadamente 180° en comparación con la respuesta inicial del
rotor. Los vectores de vibración residual posterior a la colocación del arreglo de pesos se presentan en la Tabla
8.9.
Tabla 8.9. Vibración residual posterior a la colocación del arreglo de pesos modales. Plano Primer modo Segundo modo
1 2
A continuación, se procede al cálculo de los pesos de corrección. Primeramente, se realiza la
descomposición sobre los ejes y de los datos presentados en las Tablas 8.4, 8.7 y 8.9, de acuerdo con
las Figura 8.2 y 8.3.
En la Tabla 8.10 se presentan los componentes de los vectores de vibración iníciales de la Tabla 8.4 sobre
los ejes y .
Tabla 8.10. Componentes de los vectores de vibración iníciales sobre los ejes y .
Plano Primer modo Segundo modo 1
2
De la misma manera, en la Tabla 8.11, se presentan los componentes sobre los ejes y de los pesos
presentados en la Tabla 8.7.
Tabla 8.11. Componentes de los pesos sobre los ejes y . Plano Primer modo Segundo modo
1
2
Así mismo, en la Tabla 8.12 se presentan los componentes de la vibración residual de la Tabla 8.9 sobre los
ejes y .
Tabla 8.12. Componentes de los vectores de vibración residuales sobre los ejes y .
Plano Primer modo Segundo modo

1
2
Los vectores efecto se determinan con los datos de las Tablas 8.10 y 8.12, de acuerdo con la ec. 8.4.
Tabla 8.13. Componentes de los vectores efecto sobre los ejes y . Plano Primer modo Segundo modo
1
2
La matriz de coeficientes de influencia se determina con los datos de las Tablas 8.11 y 8.13, de acuerdo con
las ec. 8.5, esta se presenta en la Tabla 8.14.
Tabla 8.14. Matriz de coeficientes de influencia sobre los ejes y . Plano Primer modo Segundo modo
1
2
Una vez que se determino la matriz de coeficientes de influencia, se procede a calcular los pesos de
corrección de acuerdo con la ec. 8.6, éstos se presentan en la Tabla 8.15.
Tabla 8.15. Componentes de los pesos de corrección sobre los ejes y . Plano Primer modo Segundo modo
1
2
En la Tabla 8.16, se presentan los pesos de balanceo considerados para el primero y segundo modo de
vibración, estos resultan de la suma vectorial de los datos presentados en la Tabla 8.15.

Tabla 8.16. Pesos de corrección. Plano Primer modo Segundo modo
1 2
Finalmente, en la Tabla 8.17 se presenta el arreglo de pesos modales de corrección obtenido de la suma
vectorial de los pesos de cada modo para cada plano de balanceo.
Tabla 8.17. Arreglo de pesos modales de corrección.
Plano 1 Plano 2
Una vez que se calculó el arreglo de pesos modales de corrección, se reemplazan los pesos de la Tabla 8.8
por los de la Tabla 8.17.
Posterior a la colocación del arreglo de pesos modales, se obtienen los diagramas polares de respuesta en
los planos de balanceo, éstos se muestran en la Fig. 8.9 y 8.10.

Figura 8.9. Diagrama polar de respuesta, transductor 1, dirección X.
dddddddddddd
Figura 8.10. Diagrama polar de respuesta, transductor 2, dirección X.
Los vectores de vibración residual posterior a la colocación del arreglo de pesos se presentan en la Tabla
8.18.
Tabla 8.18. Vibración residual posterior a la colocación del arreglo de pesos modales.
Plano Primer modo Segundo modo
1 325.3 μm, 230°
41.25 μm, 243°
2 306.4 μm, 230° 45.62 μm, 60°
De acuerdo con los valores de vibración residual presentados en la Tabla 8.18, se logró reducir la vibración
inicial del rotor en los porcentajes que se presentan en la Tabla 8.19.
Tabla 8.19. Reducciones de las vibraciones iníciales.
Plano Primer modo Segundo modo
1 64% 58% 2 65% -8%

Con el propósito de aumentar los porcentajes de reducción de las vibraciones iníciales, se consideran las
vibraciones residuales que se presentan en la Tabla 8.18 como vibraciones iníciales, y de acuerdo con la ec.
8.6 se determinan los nuevos pesos de balanceo. Nótese que se utilizan los mismos coeficientes de
influencia de la Tabla 8.14.
Los pesos de balanceo que resultan de este proceso, se presentan en la Tabla 8.20.
Tabla 8.20. Pesos de balanceo. Plano Primer modo Segundo modo
1 2
En la Tabla 8.21, se presentan los pesos de balanceo resultantes para el primero y segundo modo, estos se
obtienen suma vectorial de los datos presentados en la Tabla 8.20.
Tabla 8.21. Arreglo de pesos modales de balanceo.
Plano 1 Plano 2
Dado que el arreglo de pesos modales de la Tabla 8.21 se determinó al considerar las vibraciones residuales
como vibraciones iníciales, el arreglo de pesos modales de balanceo final se obtiene de la suma vectorial de
los pesos presentados en la Tabla 8.17 y 8.21. El arreglo de pesos de balanceo se presenta en la Tabla
8.22.
Tabla 8.22. Arreglo de pesos modales de balanceo.
Plano 1 Plano 2
Posterior a la colocación del arreglo de pesos modales de balanceo final, se obtienen los diagramas de
respuesta en los correspondientes planos de balanceo, Fig. 8.11 y 8.12. Con fines de comparación, en las
Fig. 8.11 y 8.12 también se muestra la respuesta inicial del rotor.
DDDDDD
ddddddddddddddddddddddddddddddddddddDDDDDD

a)
b)
Figura 8.11. Diagramas de respuesta, transductor 1, dirección X. b) Diagrama de Bode de amplitud, b) Diagrama Polar de respuesta.
dddddddddddddddddddddddddddddddddddddddddddddddSSSSSSSSSSSSS

a)
b)
Figura 8.12. Diagramas de respuesta, transductor 2, dirección X. a) Diagrama de Bode de amplitud, b) Diagrama Polar de respuesta.
De acuerdo con los diagramas polares de respuesta de las Figuras 8.11 y 8.12, se identificaron los vectores
de vibración residuales, Tabla 8.23.
Tabla 8.23. Vectores de vibración residual finales.
Plano Primer modo Segundo

modo
1 202.1 μm, 222°
14.82 μm, 147°
2 214.3 μm, 226°
31.35 μm, 330°
De la comparación de los vectores de vibración iníciales y residuales, se concluyó que se logró reducir la
vibración del rotor en los porcentajes que se presentan en la Tabla 8.24.
Tabla 8.24. Reducciones de las vibraciones iníciales.
Plano Primer modo Segundo modo
1 78% 85% 2 76% 26%
8.3.2 CASO 2

La configuración y características del rotor asimétrico se muestran en la Fig. 8.13 y en la Tabla
8.25, respectivamente.
Figura 8.13. Configuración del rotor asimétrico.
Tabla 8.25. Características del rotor asimétrico.
Flecha Longitudes, L, (m) L1=0.025; L2=0.11; L3=0.21; L4=0.11; L5=0.025 Radio de la flecha, r, (m) 0.006 Modulo de Young, E, (N/m2) 2.1x1010 Densidad, ρ, (kg/m3) 7870 Modulo de corte, G, (kg/m2) 1x106 Asimetría, σ 0.153
Discos D1 D2 Espesor (m) 0.02 0.02 Radio interno (m) 0.006 0.006 Radio externo (m) 0.1 0.1
Soportes Rigidez, k, (N/m) kxx=12.5x103 kzz=12.5x103 Amortiguamiento, c, (N/m/s) cxx=3.8x103 czz=3.8x103
El sistema se discretizó en 49 nodos y los transductores se colocaron en los nodos 14 y 36, nodos
que corresponden a los planos de balanceo 1 y 2, respectivamente.
Los parámetros del amortiguamiento considerado en el modelo se presentan en la Tabla 8.26.
Tabla 8.26. Parámetros del amortiguamiento.
Frecuencia Magnitud

(rad/s) 70 0.25
700 0.4
Los valores del desbalance inicial se eligieron arbi ariamente, éstos se muestran en la Tabla 8.27. trTabla 8.27. Desbalance inicial.
Nodo Magnitud Fase
17 0. 00018 kg.m 232 ° 33 0.0002 kg.m 166° 38 0.000135
kg.m 92°
n las Figuras 8.14 y 8.15, se muestran los diagramas polares de respuesta de los dos primeros E
modos obtenidos mediante los transductores 1 y 2 en la dirección X, respectivamente. CCCCCCCCCCCCC
Figura 8.14. Diagrama polar de respuesta, transductor 1, dirección X.
ffffffffffffffffffffffffff ffffffffffffffffffffffff ffff

Figura 8.15. Diagrama polar de respuesta, transductor 2, dirección X.
En los diagramas polares de respuesta de las Fig. 8.14 y 8.15, se identificaron los vectores de
vibración iníciales (amplitud máxima) de cada modo de vibración, éstos se presentan en la Tabla
8.28. Tabla 8.28. Vectores de vibración iníciales.
Plano Primer modo Segundo modo 1 2
La posición angular del desbalance para el primer modo de vibración, se determinó de acuerdo al
análisis de las sección 7.1.2, Capítulo 7, mientras que la posición angular del desbalance del
segundo modo de vibración, se determinó considerando las características de un diagrama polar de
respuesta de un rotor simétrico.
De acuerdo con lo anterior, en la Tabla 8.29 se presentan las posiciones angulares del desbalance.
Tabla 8.29. Posición angular de la fuerza de desbalance.
Plano Primer modo Segundo modo
1 2
Se debe tener en cuenta, que resultara inevitable introducir errores en el proceso de balanceo al
considerar los criterios anteriores, sin embargo, ya se ha mencionado la dificultad que presenta la
respuesta de los rotores asimétricos para localizar la posición angular del desbalance.
En función de las magnitudes de los vectores de vibración de la Tabla 8.28, se determinaron las
proporciones entre los planos de balanceo 1 y 2 para cada uno de los modos de vibración. Por
tanto, los factores de forma modal obtenidos se muestran en la Tabla 8.30. Tabla 8.30. Factores de forma modal.
Plano Primer modo Segundo modo
1 2
El arreglo de pesos modales para balancear los dos primeros modos de vibración, se obtiene de
acuerdo a la ec. 8.1. Para la solución del sistema de ecuaciones se propone un peso de prueba de
3 gramos para el primer modo, y 2 gramos para el segundo modo.
Los arreglos de pesos modales de prueba obtenidos se presentan en la Tabla 8.31. Tabla 8.31. Pesos de balanceo para el primero y segundo modo.
Plano Primer modo Segundo modo 1 2
El arreglo de pesos modales de prueba, se obtiene de la suma vectorial de los pesos de los dos modos de
vibración en cada plano de balanceo, este se presenta en la Tabla 8.32.
Tabla 8.32. Arreglo de pesos modales de prueba. Plano 1 Plano 2
Posterior a la colocación del arreglo de pesos modales de prueba, se obtuvieron los diagramas polares de
respuesta en los planos de balanceo, Fig. 8.16 y 8.17.
ddddddddd

Figura 8.16. Diagrama polar de respuesta, transductor 1, dirección X.
ZZZZZ
Figura 8.17. Diagrama polar de respuesta, transductor 2, dirección X.
Los vectores de vibración residual posterior a la colocación del arreglo de pesos modales de prueba se
presentan en la Tabla 8.33.
Tabla 8.33. Vibración residual posterior a la colocación del arreglo de pesos modales de prueba. Plano Primer modo Segundo modo
1 2
A continuación se procede al cálculo de los pesos de corrección. Primeramente, se realiza la
descomposición sobre los ejes y de los datos presentados en las Tablas 8.28, 8.31 y 8.33, de acuerdo
con las Figura 8.2 y 8.3.
En la Tabla 8.34 se presentan los componentes de los vectores de vibración iníciales de la Tabla 8.28 sobre
los ejes y .
Tabla 8.34. Componentes de los vectores de vibración iníciales sobre los ejes y .
Plano Primer modo Segundo modo 1
2
De la misma manera, en la Tabla 8.35, se presentan las componentes sobre los ejes y de los pesos
presentados en la Tabla 8.31.
Tabla 8.35. Componentes de los pesos sobre los ejes y . Plano Primer modo Segundo modo
1
2
Así mismo, en la Tabla 8.36 se presentan los componentes de la vibración residual de la Tabla 8.33 sobre
los ejes y .
Tabla 8.36. Componentes de los vectores de vibración residuales sobre los ejes y .
Plano Primer modo Segundo modo
1
2
Los vectores efecto se determinan con los datos de las Tablas 8.34 y 8.36, éstos se presentan en la Tabla
8.37.

Tabla 8.37. Componentes de los vectores efecto sobre los ejes y . Plano Primer modo Segundo modo
1
2
La matriz de coeficientes de influencia se determina con los datos de las Tablas 8.35 y 8.37, de acuerdo con
las ec. 8.5, esta se presenta en la Tabla 8.38.
Tabla 8.38. Matriz de coeficientes de influencia sobre los ejes y . Plano Primer modo Segundo modo
1
2
Una vez que se determinó la matriz de coeficientes de influencia, se procede a calcular los pesos de
corrección de acuerdo a la ec. 8.6, éstos se presentan en la Tabla 8.39.
Tabla 8.39. Componentes de los pesos de corrección sobre los ejes y . Plano Primer modo Segundo modo
1
2
En la Tabla 8.40, se presentan los pesos considerados para el primero y segundo modo, estos resultan de la
suma vectorial de los datos presentados en la Tabla 8.39.
Tabla 8.40. Pesos para el primero y segundo modo. Plano Primer modo Segundo modo
1

2
Finalmente, en la Tabla 8.41 se presenta el arreglo de pesos modales de corrección obtenido de la suma
vectorial de los pesos de cada modo para cada plano de balanceo.
Tabla 8.41. Arreglo de pesos modales.
Plano 1 Plano 2
Una vez que se calculó el arreglo de pesos modales de corrección, se reemplazan los pesos de la Tabla
8.32 por los de la Tabla 8.41.
Posterior a la colocación del arreglo de pesos modales, se obtienen los diagramas polares de respuesta en
los planos de balanceo, Fig. 8.18 y 8.19. Con fines de comparación, en las Fig. 8.18 y 8.19 también se
muestra la respuesta inicial del rotor.
fffffffffffffffffffffffffffffffffffffffffffffffffffff
a)
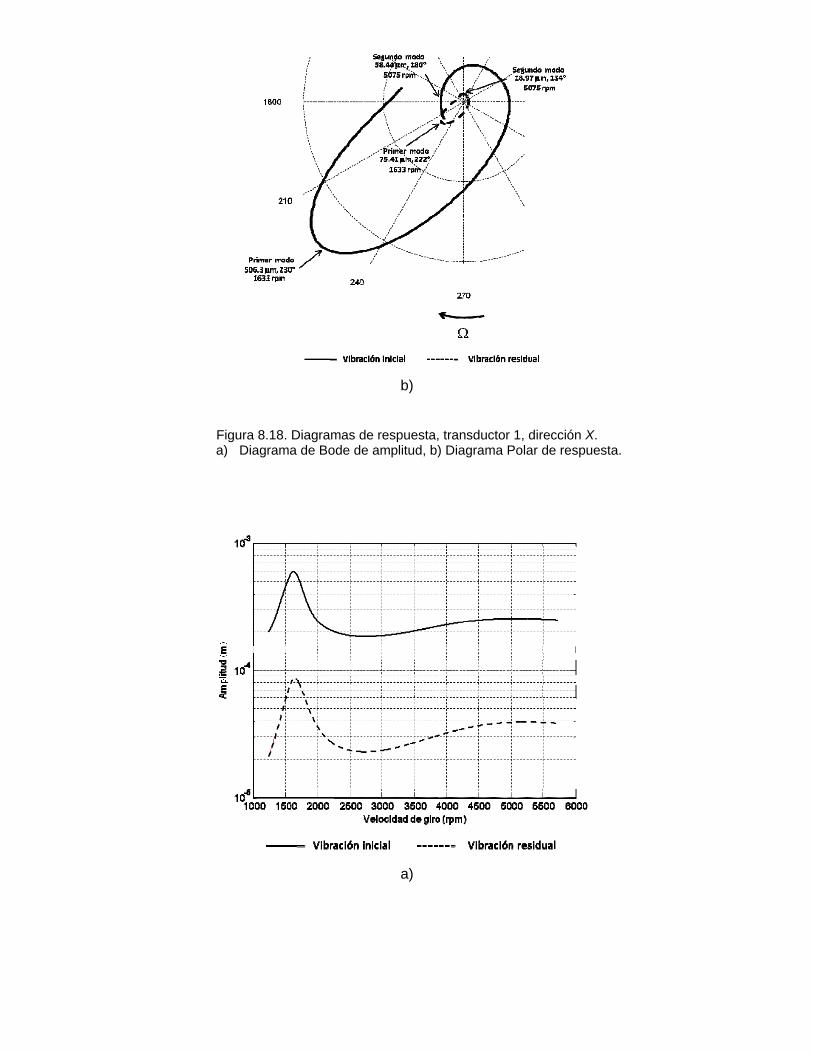
b)
Figura 8.18. Diagramas de respuesta, transductor 1, dirección X. a) Diagrama de Bode de amplitud, b) Diagrama Polar de respuesta.
cccccccccccccccccccccccccccccccccccccc
a)

b)
Figura 8.19. Diagramas de respuesta, transductor 2, dirección X. a) Diagrama de Bode de amplitud, b) Diagrama Polar de respuesta.
De acuerdo con los diagramas polares de respuesta de las Figuras 8.18 y 8.19, se identificaron los vectores
de vibración residuales, Tabla 8.42.
Tabla 8.42. Vibración residual posterior a la colocación del arreglo de pesos modales.
Plano Primer modo Segundo modo
1 75.41 μm, 222°
18.97 μm, 134°
2 85.31 μm, 227°
39.03 μm, 318°
De la comparación de los vectores de vibración iníciales y residuales, se concluyó que se logró reducir la
vibración del rotor en los porcentajes que se presentan en la Tabla 8.43.
Tabla 8.43. Reducciones de las vibraciones iníciales.
Plano Primer modo Segundo modo
1 85% 68% 2 86% 85%


C A P I T U L O 9
CONCLUSIONES Y RECOMENDACIONES
El objetivo de este capítulo es presentar las conclusiones obtenidas del desarrollo de este trabajo,
así como también las recomendaciones para investigaciones futuras en esta área.
9.1 CONCLUSIONES
En el presente trabajo se realizó el estudio del comportamiento dinámico de los rotores asimétricos
mediante un modelo numérico basado en el método de elemento finito, lo anterior con la finalidad
de proponer un método de balanceo utilizando arreglo de pesos modales.
Las conclusiones generadas de los resultados obtenidos del trabajo realizado se resumen a
continuación: 1) Se comprobó que el comportamiento dinámico de los rotores asimétricos depende de la relación
entre el factor de asimétrica y el amortiguamiento del sistema , donde si se presenta
inestabilidad en la zona de resonancia.
2) En función de los valores considerados de asimetría y amortiguamiento , los diagramas polares de
respuesta cambian de forma geométrica.
3) Se comprobó que los diagramas polares de respuesta de un rotor asimétrico son de forma elíptica y
estos se encuentran orientados en los ejes de . Sin embargo, en función de la relación del
amortiguamiento y la asimetría modal, los diagramas polares de respuesta para el segundo modo de
vibración, son similares a los diagramas polares de respuesta correspondiente a un rotor simétrico.
4) Así mismo, se verificó que los diagramas polares de respuesta de un rotor asimétrico presentan
cambios en la amplitud y fase de la respuesta, al considerar diferentes posiciones angulares de la
fuerza de excitación. Se observó que los ejes de mayor y menor sensibilidad a la fuerza de
excitación, se encuentran en los ejes de .
5) El modelo numérico desarrollado en este trabajo, permite determinar de manera confiable las
frecuencias naturales, formas modales y respuesta al desbalance de rotores simétricos y asimétricos,
siempre y cuando se conozcan las propiedades de los soportes.

6) Se analizó la evolución de los diagramas polares de respuesta para diferentes intervalos de
posiciones angulares de la fuerza de excitación, sin embargo, estos pueden variar en función del
amortiguamiento y de la asimetría del rotor. Se propone un criterio de localización de la fuerza de
excitación, de acuerdo a la orientación de los diagramas polares de repuesta, sin embargo este
criterio es subjetivo.
7) De acuerdo con el comportamiento dinámico que presentan los rotores asimétricos, se propone
caracterizar la sensibilidad de la respuesta al desbalance de los ejes localizados a del rotor.
Esto con la finalidad de encontrar un arreglo de pesos modales de balanceo.
8) Se propuso un método de balanceo para rotores asimétricos, considerando arreglo de pesos
modales.
9) El método de balanceo propuesto, se aplicó al balanceo de rotores asimétricos de forma numérica.
Para ésto, se utilizó el modelo matemático desarrollado.
10) Para los dos casos de balanceo realizados, la vibración inicial se redujo aproximadamente en un 80
%, sin embargo el éxito del método propuesto depende del criterio de localización de la posición
angular de la fuerza de excitación. Así mismo, depende de la linealidad de la respuesta al considerar
los pesos en cada una de las posiciones angulares en el rotor. Lo anterior es función del
amortiguamiento y del grado de asimetría del sistema.
9.2 RECOMENDACIONES
1) Realizar el balanceo de un rotor asimétrico de manera experimental, aplicando el método de
balanceo propuesto.
2) Proponer una metodología, para determinar la posición angular de la fuerza de excitación utilizando
diagramas polares de respuesta.

REFERENCIAS BIBLIOGRAFICAS
[1] Jeffcott H. H., 1919. “The Lateral Vibrations of Loaded Shafts in the Neighborhood of a
Whirling Speed”, Philosofical Maganize, Vol. 37, pp. 304.
[2] Taylor H. D., 1940. “Critical Speed Behavior of Unsymmetrical Shafts”, ASME, Journal of
Applied Mechanics.
[3] Bishop R. E. D., and Parkinson A. G., 1965. “Second Order Vibrations of Flexible Shafts”,
Philosofical Transations of Royal Society of London, Vol. 259, No. 1095.
[4] Parkinson A. G., 1966. “On the Balancing of Shafts with Axial Asymmetry”, Proceeding of
the Royal Society, A 294, 66.
[5] Shiraki K., and Kanki H., 1974. “New Field Balancing Method of Tandem Connected
Multispan Flexible Rotors System”, International Union of Theoretical and Applied Mechanics,
Dynamics of Rotor Simposium, Lyngby, Demark.
[6] Iwatsubo T., Nakamura M., 1968. “Balancing of Flexible Rotors with Asymmetric Stiffness”,
Memoirs of the Faculty of Engineering, Kobe University, No. 15.
[7] Matsukura Y. T., Inoue. Kiso M., and Tomisawa M., 1979. “On the Balancing Convergence
of Flexible Rotors, with Especial Reference to Asymmetric”, Journal of Sound and Vibrations 63(3),
p. 419-428.
[8] Songbo X. y Yacai P., 1975. “A new balance method for flexible rotors with asymmetric
principal stiffnesses”.
[9] Inagaki T., Kanki H., Shiraki K. “Response Analysis of a General Asymetric Rotor-Bearing
System”, ASME, Paper No. 79-DET-84.
[10] Colín J., 1996. “Balanceo de Rotores Asimétricos”, Centro Nacional de Investigación y
Desarrollo Tecnológico, Tesis de Maestría. [11] Lalane M. y Ferraris G., 1990. “Rotodynamics Prediction in Engineering”, primera edición,
Chichester, England, ed. John Wiley & Sons.
[12] Bishop R. E. D., and Parkinson A. G., 1972. “On the Use of Balancing Machines for
Flexible Rotor”, Journal of Engineering for Industry, paper No. 71-Vidr-73. pp. 561-565.
[13] Preciado, D. E., 1998. “Mixed Modal Balancing of Flexible Rotors without Trials Runs”, PhD
Thesis, Cranfield University, England, pp. 96-103.

[14] Preciado D. E., Aguirre R. J. E. 1993. “Balanceo de rotores utilizando coeficientes de
influencia”, Boletín de Instituto de Investigaciones Eléctricas, Cuernavaca, México, pp. 21-32. [15] Bathe Klaus-Jürgen, 1996. “Finite Element Procedures”, United States of America, ed. Printice-Hall,
pp. 1-3.
[16] Samano A. S., 1996. “Detección de Fracturas en Rotores a través de Vibraciones
Mecánicas”, Centro Nacional de Investigación y Desarrollo Tecnológico, Tesis de Maestría.
Recommended
![[PPT]Análisis de vibración - Assme | Asesoria y Suministrosassme.com.mx/pps/Analisis_de_vibracion.pps · Web viewAnálisis de vibración A S S M E Análisis de vibración Herramienta](https://img.pdfslide.tips/doc/110x75/5aa33c7d7f8b9ada698dfd02/pptanlisis-de-vibracin-assme-asesoria-y-viewanlisis-de-vibracin-a-s-s-m-e.jpg)
















