Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 1
Cinemática da partícula – 1ª Parte
1.1 – Derivada de um vector em ordem a um escalar
Seja um vector A
função de um escalar g : )(gAA
=
Define-se
gA
ggAggA
dgAd
gg Δ
Δ=
Δ
−Δ+= →Δ→Δ
00 lim)()(lim
A
Δ
)( ggA Δ+
)(gA
Notar que sendo
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⇔++=
3
2
1
332211
AAA
uAuAuAA
vem
dgudAu
dgdA
dgudAu
dgdA
dgudAu
dgdA
dgAd 3
3332
2221
111
+++++=
pois os versores podem depender de g !
Considere-se o caso particular em que o vector A
é o vector posição r de um ponto P que se se desloca no espaço quando o tempo decorre e em que o escalar (g) é o tempo t.

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 2
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⇔++=
3
2
1
332211
rrr
urururr
A sua derivada em ordem ao tempo chama-se velocidade do ponto P:
dtudru
dtdr
dtudru
dtdr
dtudru
dtdr
dtrd
trv t
333
3222
2111
10lim
+++++==ΔΔ
= →Δ
rΔ
)( ttr Δ+
)(trP
Ao quociente tr
ΔΔ
chama-se velocidade média durante o intervalo de tempo Δt.
1.2 – Representação intrínseca da velocidade e da aceleração
Vamos estudar um sistema de coordenadas a que se chama “intrínseco” pelo facto de ser definido a partir da própria trajectória. Notar que, assim sendo, os versores irão depender não só da posição do ponto mas também da maneira como essa posição varia (trajectória).
r τ
η
b
x
y
z
O
ητ
ητ
∧=
⊥
b
Triedo de Frenet );;( ητb
a) Versor da tangente )(τ
dsrd
=τÉ tangente, pois rd o é;
É versor, pois 1=⇒= τ dsrd

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 3
b) Versor da normal )(η
dsd
Kτ
η
1=
K Curvatura da linha no ponto considerado.
dsdR τ
η
=
R Raio de curvatura da linha no ponto considerado.
u Por definição é dsdK
Rτ
==1
, pelo que o vector η
acima definido tem módulo 1, i.é, é versor.
u Verifiquemos que é τη
⊥
τττ
ττ
τττ
ττ
τττττ
⊥⇒=⋅=⋅+⋅=⋅=
⇒=⋅⇒=⋅⇒==
dsd
dsd
dsd
dsd
dsd
dsd
cte
02)(0
0)(11
Notar que não foi o facto de o módulo ser 1 que foi relevante, mas sim o facto de o módulo ser constante!
“ Se um vector depende de um escalar mas tem módulo constante (i.é, se só a sua direcção varia) a sua derivada em relação ao escalar produz um vector que lhe é perpendicular”.
C) Velocidade )(v
ττ
τ
vdtsd
dtsd
dsrd
dtrdv
v
====
==
A velocidade é um vector dirigido segundo a direcção tangente à trajectória.

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 4
d) Aceleração )(a
)(
tan
)(
2
2
1
centríptaounormalaceleraçãoRva
gencialaceleraçãodtvda
Rvaa
Rv
dtsd
dsd
dtdcomo
dtdv
dtvdv
dtd
dtvda
t
a
t
vR
at
→=
→=
+=⇒==
+===
===
=
η
η
ητηττ
τττ
η
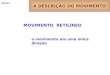
À aceleração normal também pode chamar-se centrípeta porque ela aponta para o centro de curvatura da trajectória.
P1 ( t1 )
P2 ( t2 )
1η
2ηC2
C1 +
+ R2
R1
O “centro de curvatura” por definição situa-se sobre a r e c t a n o r m a l , a u m a distância da curva, “para dentro”, igual ao raio de curvatura.

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 5
] A componente tangencial da aceleração está associada (é igual, aliás) à variação do módulo da velocidade isto é, à variação da “rapidez”.
] A componente normal da aceleração está associada à variação da direcção do vector velocidade:
dtdvanτ
=
Assim, as acelerações ( ⇒ forças ) são necessárias não só para fazer variar a rapidez de um movimento mas também necessárias para fazer variar a direcção da trajectória.
Casos particulares
t
a
adtvd
dtdv
dtvdv
dtd
dtvda
teconsdirecçãocte
t
==+===
=
=
=
→
ττ
ττ
τ
0
)(
)tan(º1
È claro que neste caso a trajectória é uma recta como se pode verificar
0,0
);(
2
2
=∞=⇒=⇒=
+=
KRRv
dtdvaécasoneste
geralRv
dtdva
τ
ητ
Uma linha com curvatura nula (ou, equivalentemente, com raio de curvatura infinito) é uma recta.

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 6
2º v = cte. (movimento “uniforme” no que respeita à rapidez)
ηητ
ττ
η
aRv
dtdv
dtvdv
dtd
dtvda
a
==+===
=
=
2
0
)(
O caso R = const. ⎯ movimento circular ⎯ é um caso particular deste caso particular.
1.3 – Lei do movimento
Descrever um movimento é fornecer a lei do movimento, isto é, especificar a posição do ponto em estudo num dado sistema de referência em todos os instantes de tempo por meio de uma expressão
⎩⎨⎧
⇔⎪⎩
⎪⎨
⎧
=
=
=
⇔=.).(
)()()(
)(coorddesistqq
tzztyytxx
trr
È claro que as equações anteriores são as equações paramétricas da trajectória, sendo o tempo, o parâmetro. As equações cartesianas da trajectória obtêm-se pois por eliminação do tempo.
Ex .
atrajectóridacartesianaeq
atrajectóridaasparamétriceq
z
xy
zty
tx
tt
jtitr
.
2
.
222
04
0
2
0
22
⎪⎩
⎪⎨
⎧
=
=⇒
⎪⎩
⎪⎨
⎧
=
=
=
⇔⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⇔+=
1.3.1 – Problemas fundamentais da cinemática
)
()(
)(;;:
0 geralcasonotempodofunção
dadottiniciaiscondições
oo tavrDados
=

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 7
⎪⎩
⎪⎨
⎧
⇔
)()()(
)()(:min
tzmovimentodoleity
txtrarDeter
È o problema mais frequente. Vejamos o método de resolução no caso particular de o vector aceleração ser constante.
)0()(
00
00
00
=+=
⇒−=−
=
=→=
∫∫
tsetavvttavv
dtavd
dtavddtvda
t
t
v
v
∫
∫∫
=−
=
=→=
t
t
t
t
r
r
dtvrr
dtvrd
dtvrddtrdv
0
00
0
200 2
1,
tatvrr
Logo
++=
Ex .
x
y
0r
0v
jgg
−=
trajectória ? )(;)(;2: 00 ctegajivjrDados =+==
zyx
tgtt
tgtt
r
tatvrr
asparamétriceq
.
22
200
0212
0210
0020
21
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−+=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
⇔++=

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 8
A equação cartesiana da trajectória obtém-se como vimos, por substituição do parâmetro t;
2
212 xgxy
tx
−+=
⇒=
(Parábola)
1.3.2 – Alguns casos particulares
1.3.2.1 - Movimento com aceleração constante e rectilíneo )( ⋅=→
ctea
Neste caso, e escolhendo para eixo do x a própria recta sobre a qual se efectua o movimento, temos que aevvrr
00 ;;; têm todos a mesma direcção, tendo componentes apenas segundo aquele eixo. Notar em particular que a tem a direcção de v (de outro modo, a trajectória encurvaria !!).
Podemos pois escrever a seguinte relação escalar:
200 2
1 tatvxx ++=
Não esquecer que pode ser
a > 0 ⇒ aceleração positiva ⇒ (movimento uniformemente acelerado)
a < 0 ⇒ aceleração negativa ⇒ (movimento uniformemente retardado)
a = 0 ⇒ aceleração nula ( ⇒ v = vo ) ⇒ (movimento uniforme)

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 9
1.3.2.2 – Movimento circular
Neste caso é preferível utilizar a representação polar:
x
y
R O
τθ
≡u
ρu
η θd
⎩⎨⎧
−≡
≡
η
τ
ρ
θ
uu
ds
Velocidade / aceleração:
ρθ
ρ
θθ
η
θθ
ητ
θθ
θ
ττ
uRuRa
Entãou
RRdtd
dtsd
dtdv
Rv
dtdva
cteRRdtdRvdRds
dtdsv
vdtdsv
2
2
2
2
:
)(
)(
.)(;
)(
−=
−=
===
+=••
===⇒==
==•

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 10
Define-se:
θ-ângulo de rotação [rad]
ω-velocidade angular [rad/s]
α- aceleração angular [rad/s2] ⎪⎪⎩
⎪⎪⎨
⎧
→===
→==
angularAceleraçãodtd
dtd
angularVelocidadedtd
θθω
α
θθ
ω
2
2
Vector velocidade angular, ou Vector rotação
Define-se vector velocidade angular um vector tal que
atrajectóriRr
Notar
vectordoAemmomentoMvRv A
⊥
∧=∧
=⇔∧=
ω
ωω
ωωω
º2º1
:
)(
Existe uma correspondência entre os movimentos de rotação e os de translação, que pode ser expressa pelas seguintes relações:
)()(
αθ
ωθ
θ
ouaouv
x
↔
↔
↔
θω
α
θθ
ω
===
===
dtd
dtdva
dtd
dtdxv
;
;
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
−
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
xyyx
zxxz
yzzy
z
y
x
z
y
x
z
y
x
rrrrrr
rrr
vvv
..
..
..
ωω
ωω
ωω
ω
ω
ω
z
Rv
∧=ω
r
x
y
ω
R
O
A

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 11
Assim, e por exemplo, sabendo que para um movimento de translação com aceleração constante se tem
tavv
tatvxx
±=
±+=
0
200 2
1
pode escrever-se imediatamente a expressão para um movimento de rotação com aceleração constante:
2
21 ttoo αωθθ ±±=
to αωω ±=
Exemplo de aplicação: Determinar para a posição representada na figura, a velocidade linear de uma partícula que executa uma trajectória circular com um raio de 1,5 m e com velocidade angular constante de 10 rad/s.
krjrirr zyx
++=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
0)45(sin)45(cos
rr
rrr
r
z
y
x
kji zyx
ωωωω ++=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
θω
ω
ω
ω
00
z
y
x
kvjvivv zyx
++=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
×⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=×=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
061.1061.10
0)45(cos)45sin(
0)45sin()45cos(
00
rr
rr
rvvv
v
z
y
x
θ
θ
θ
ω
y
x
rv ×ω=
ω
r
o º45=θ

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 12
x
z
y o
Vesfera/Carro vcarro
Vesfera/carro- Velocidade da esfera em relação ao carro
Vesfera/solo- Velocidade do carro
2 - Cinemática da partícula – 2ª Parte 2.1 - Movimento Relativo de Translação
xo
zo
yo
x1
z1
y1
Ar
A
B Br
A/Br
Referencial fixo
Referencial móvel solidário com A
Na figura seguinte estão representados a posição de duas partículas onde os vectores rA e rB são as posições absolutas dessas partículas. A posição relativa entre as duas partículas é definida pelo vector rB/A, e representa a posição da partícula B em relação à partícula A.
Trajectória da partícula A
Ar
- Posição absoluta da partícula A
Br
- Posição absoluta da partícula B
- Posição relativa da partícula B em relação à partícula A e ao eixo móvel.
A/Br

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 13
Ø Posição:A posição da partícula B é definida como a soma vectorial da posição absoluta da partícula A e a posição relativa da partícula B em relação à partícula A
Ar
Br
A/Br
ABAB rrr /
+=
Ø Velocidade:A velocidade da partícula B é determinada a partir das derivadas dos vectores posição em ordem ao tempo.
ABAB vvv /
+=
fixo. lreferencia dopartir a medidos são
porque,absolutasvelociadessãodtrdve
dtrdvOnde B
BA
A
==
móvel refrencial dopartir a observada é dtrdv relativa deA velocida A/B
A/B
=
Bv
Av
A/Bv
Ø Aceleração:Através da derivada no tempo da velocidade é obtido aceleração absoluta e relativa, cuja relação é semelhante à obtida com os vectores posição.
ABAB aaa /
+=
Aa
Ba
A/Ba
111
B/AA/B
z,y, xmóvel eixo o com solidário
eA em colocado está se quando observamos que B aceleração a é dtvda Onde
=

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 14
Exemplo de aplicação:
Um comboio desloca-se a uma velocidade constante de 60km/h, atravessando uma estrada conforme a figura mostra. Se o carro se deslocar à velocidade de 45km/h, determine a velocidade relativa do comboio em relação ao carro.
ABAB vvv /
+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
z)A/B(
y)A/B(
x)A/B(
Az
Ay
Ax
Bz
By
Bx
vvv
vvv
vvv
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
zAB
yAB
xAB
vvv
)/(
)/(
)/(
0)45sin(45)45cos(45
0060
[ ]h/km082.3118.28
0)45(sen45)45cos(4560
vvv
z)A/B(
y)A/B(
x)A/B(
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
[ ]hkmjiv AB /82.3118.28/
−=

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 15
2.2 – Sistemas em movimento relativo de rotação
Considerem-se dois sistemas de referência centrados em O, um OXYZ fixo e outro rotativo em torno do eixo fixo OA; seja Ω a velocidade angular do sistema Oxyz num dado instante (ver figura). Considere-se agora uma função vectorial Q (t) representada pelo vector Q aplicado em O; como o tempo t varia, tanto o módulo como a direcção de Q variam. Como a variação de Q vista por um observador que usa o sistema OXYZ como referência é diferente da variação de Q vista por um que usa o sistema Oxyz, deve-se esperar que a derivada de Q dependa do sistema que for tomado como referência. Portanto, devemos designar por OXYZQ)( a derivada de Q em relação ao sistema fixo OXYZ e por OxyzQ)( a derivada em relação ao sistema rotativo Oxyz. Propomo-nos determinar a relação entre estas duas derivadas.
O X
Y
Z z
x
y
i j
k
A
Ω Q
Em primeiro lugar iremos decompor o vector Q em componentes segundo os eixos x, y e z do sistema rotativo. Designando por i, j e k os versores correspondentes, escrevemos
kQjQiQQ zyx
++=
Derivando a expressão anterior em ordem ao tempo, e considerando os versores i, j e k como fixos (pois para um observador em Oxyz são fixos), obtemos a derivada de Q em relação ao sistema rotativo Oxyz.
kQjQiQQ zyxOxyz
++=⋅

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 16
Para obter a derivada de Q em relação ao sistema fixo OXYZ, devemos considerar os versores i,j e k como varáveis (móveis) quando derivamos Q
)()(
)()()(
][
dtkdQ
dtjdQ
dtidQkQjQiQQ
dtkdQkQ
dtjdQjQ
dtidQiQQ
kQjQiQdtdQ
zyx
Q
zyxOXYZ
zzyyxxOXYZ
zyxOXYZ
Oxyz
+++++=
=+++++=
=++=
⋅
=
⋅
⋅
⋅
se o vector Q estivesse fixo dentro do sistema Oxyz, uma vez que
Observamos que a derivada de OXYZQ)( se reduziria aos três últimos termos da expressão anterior
OxyzQ)( seria então nulo. Mas, neste caso, OXYZQ)( representaria a velocidade de um ponto material localizado na ponta de Q e pertencente a um corpo rigidamente ligado ao sistema Oxyz. Então os três últimos termos da referida expressão representam a velocidade desse ponto material; como o sistema Oxyz tem uma velocidade angular Ω em relação a OXYZ, no instante considerado, escrevemos
QdtkdQ
dtjdQ
dtidQ
kdtkd
jdtjd
idtid
zyx
∧Ω=++⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
∧Ω=
∧Ω=
∧Ω=
)(
Sendo assim, obtemos a relação fundamental:
QQQ OxyzOXYZ
∧Ω+=
⋅

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 17
2.2.1 – Movimento tridimensional de um ponto material em relação a um sistema rotativo. Aceleração de Coriolis
Vimos anteriormente que, uma dada função vectorial Q(t) e dois sistemas de referência centrados em O — um sistema fixo OXYZ e um sistema móvel Oxyz — as derivadas de Q em relação aos dois sistemas satisfazem a relação
QQQ OxyzOXYZ
∧Ω+=
⋅
Supusemos, então, que o sistema Oxyz fora construído para girar em torno de um eixo fixo OA. Entretanto, a derivada, permanece válida quando o sistema Oxyz é obrigado a ter somente um ponto fixo O. Sob esta suposição mais geral, o eixo OA representa o eixo instantâneo de rotação do sistema Oxyz, e o vector Ω, a sua velocidade angular no instante considerado.
Consideremos agora o movimento tridimensional de um ponto material P em relação ao sistema rotativo Oxyz que tem uma origem fixa O. Se o vector Q representar o vector posição r de um ponto P num dado instante e Ω a velocidade angular do sistema Oxyz em relação ao sistema fixo OXYZ no mesmo instante (ver figura), então a velocidade absoluta vP do ponto material é definida como a velocidade observada do sistema fixo OXYZ e é igual à derivada OXYZr)( de r em relação ao sistema.
rrrv OxyzOXYZP
∧Ω+==
MPpP vvv += ʹ′
móvelsistemaaorelaçãoemPdevelocidadevPcomcoincideque
móvelsistemadoPpontodovelocidadevPmaterialpontodoabsolutavelocidadevonde
MP
P
P
=
ʹ′=
=
ʹ′
O X
Y
Z z
x
y
i j
k
Ω r
P
OxyzrMas define a velocidade MPv
do ponto P em relação ao sistema móvel Oxyz. Se considerarmos que o ponto P foi ligado ao sistema móvel, então vP/M representará a velocidade relativa. Por outro lado o termo Ω ∧ r representará a velocidade vP’ dum ponto P’ do sistema móvel que coincide com P no instante considerado e costuma designar-se por velocidade de transporte. Temos, então,

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 18
A aceleração absoluta aP do ponto material é definida como a derivada de vP em relação ao sistema fixo OXYZ. Calculando as derivadas em relação a OXYZ dos termos da relação fundamental, escrevemos
][ OxyzPP rdtdrrva
+∧Ω+∧Ω==
onde todas as derivadas estão definidas em relação a OXYZ, excepto onde for indicado de outro modo. Relembrando a relação fundamental, observamos que o último termo da expressão anterior pode ser expresso como:
OxyzOxyzOxyz rrrdtd ∧Ω+=][
Por outro lado, r representa a velocidade vP e pode ser substituído pelo membro do lado direito da expressão representativa da velocidade absoluta vP apresentada anteriormente. Assim, ficará
OxyzOxyzP
OxyzOxyzOxyzP
rrrra
rrrrra
∧Ω+∧Ω∧Ω+∧Ω+=
∧Ω++∧Ω+∧Ω+∧Ω=
2)(
)()(
O primeiro termo desta última relação representa a aceleração relativa aP/M do ponto P em relação ao sistema rotativo. A aceleração de transporte será a que existir quando a velocidade relativa (e portanto também a aceleração relativa) for nula e corresponde à soma do 2º e 3º termo da expressão anterior e está associada à aceleração aP’ do ponto P’ do sistema móvel que coincide com P no instante considerado. Ao termo que “sobra” chama-se “aceleração complementar ou de Coriolis” em homenagem ao matemático francês De Coriolis (1792 – 1843).
Note-se que a aceleração de Coriolis só existe se existirem simultaneamente :
)(.
)(.
MPto
to
vrelativomov
transportedemov
→
Ω→
e se além disso, não for MPv //Ω
cMPpP aaaa ++= ʹ′

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 19
Exemplo de aplicação: Considere-se um ponto P materializado por uma cursor que se move em translação (parâmetro s) com velocidade constante u ao longo de uma barra OB, que por sua vez gira com velocidade angular constante ω em torno de O e no plano vertical.
Determinar a aceleração do ponto P.
cMPpP aaaa ++= ʹ′
s
P
B
su =
O
ω
uac ω2=
2' ωsaP =
x
y
MPc
MP
p
va
constéupoisa
OPOPa
∧=
=
∧∧+∧=→→
=ʹ′
ω
ωωω
2
.)(0
)(0
Ficará:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ω
ω−
=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ω+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧ ω−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ω+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ω∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ω
=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ω
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ω
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ω
=
==
0u2S
a
0u20
00S
0u20
0S0
00
a
00u
00
2)00S
00
(00
a
2
P
2
P
aa
P
c'P

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 20
2.2.2 – Sistema de referência em movimento geral
Considere-se um sistema fixo de referência OXYZ e um sistema Axyz que se desloca de maneira conhecida em relação a OXYZ (gira e translada). Seja P um ponto material que se movimenta no espaço. A posição de P é definida, em qualquer instante, pelo vecto rP no sistema fixo, e pelo vector rp/A no sistema móvel. Designando por rA o vector posição de A no sistema fixo, virá
X
Y
Z
x
y
z
X’
Y’
Z’
P
Ar
Pr
APrΩ
APAAPAP
APAP
vvrrv
rrr
+=+=
⇒+=
Mas a velocidade vP/A de P em relação a AX’Y’Z’ pode ser obtida aplicando a relação fundamental, bastando substituir o vector Q pelo vector rP/A naquela equação. Assim virá:
APv
AxyzAPAPAP rrvv=
+∧Ω+= )(
A aceleração absoluta aP/A do ponto material é obtida derivando-se a expressão anterior, e escrevemos
APA v
AxyzAPAxyzAPAPAP
v
AP
APAPP
rrrraa
vvva
==
+∧Ω+∧Ω∧Ω+∧Ω+=
⇒+==
)()(2)(

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 21
3 - Cinemática de Corpos Rígidos
3.1 - Movimento no Plano
O movimento plano de corpos rígidos pode ser decompostos em três tipos de movimento diferentes, classificados a seguir por ordem crescente de complexidade:
Movimento de Translação
Movimento de Translação: Graficamente regista-se este tipo de movimento quando um qualquer segmento de recta formado por dois pontos do corpo, permanece sempre paralelo e igual ao segmento original durante o movimento sendo a trajectória dos pontos sempre equidistante.
Movimento de rotação em torno de um eixo fixo Movimento de Geral no Plano
Movimento de rotação em torno de um eixo fixo: No movimento de rotação os pontos não pertencentes ao eixo fixo têm trajectórias circulares.
Movimento Geral no Plano: Quando um corpo está sujeito ao movimento geral no plano, este pode ser sempre decomposto numa combinação de um movimento translação e num movimento de rotação.

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 22
Movimento de translação Movimento Geral
Movimento de rotação
Num corpo rígido sujeito a uma translação no plano x o y, a localização dos pontos A e B são definidos para um eixo fixo x,y através dos vectores rA e rB. O sistema em translação de coordenadas x’, y’ está fixo ao corpo com origem no ponto A.
Movimento de Translação
x o
y
x’ A
y’
B
Ar
Sistema de coordenadas em translação
Sistema de fixo coordenadas
Br
A/Br
Ø Posição: A posição dos pontos A e B são definidas respectivamente, pelos vectores rA e rB. A posição relativa do ponto B em relação ao ponto A é definida pelo vector rB/A. Estes relacionam-se entre si pela seguinte expressão:
Ø Velocidade: A velocidade é determinada pela derivada do respectivo vector posição em ordem ao tempo. Sendo que o vector da velocidade relativa de B em relação a A é nulo, pois o corpo é considerado indeformável.
A/BAB rrr +=
AB vv =

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 23
Ø Aceleração: A aceleração é calculada a partir da derivada do vector velocidade. Para o movimento de translação é expressa pela seguinte relação.
AB aa
=
Movimento de Rotação
No movimento de rotação em torno de um eixo, o movimento dos pontos que formam o corpo é caracterizado pelas seguintes quantidades: posição angular, velocidade angular e aceleração angular:
• Posição angular é definida pela variável dθ [rad]
• Vector velocidade angular é definido pela variável ω [rad/s] e a relação entre a velocidade e a posição é expressa por:
• Vector aceleração angular é definido pela variável α [rad/s2] e a relação entre as outras quantidades vem definida por:
dtdθ
=ω
dtdω
=α
2
2
dtd θ
=α

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 24
Velocidade Linear- Os pontos que não pertencem ao eixo de rotação possuem velocidade linear que se relaciona com a velocidade angular do corpo. Para um ponto P genérico, a velocidade linear nesse ponto é definida por:
PP rv ∧=ω
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
ω
ω
ω
=ω⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
z
y
x
P
z
y
x
Pz
Py
Px
P
rrr
re,vvv
vqueem
zyx
zyxPP
rrr
kjirv ωωωω =∧=
A partir do módulo do vector velocidade linear obtemos somente a intensidade da velocidade. No sistema a duas dimensões, a direcção e sentido do vector velocidade podem ser conhecidos a partir da normal ao plano formado pelo vectores velocidade angular ω e r e por aplicação da regra da mão direita; roda-se o vector velocidade angular ω no sentido do vector r.
Aceleração Linear- Por conveniência, a aceleração linear de um ponto P que não pertence a esse eixo é decomposto em duas componentes; componente tangencial e componente normal a seguir definidas e representadas nas figuras.
o r
ta
na
a
rara
t
n
α
ω
=
= 2
( )dtrdr
dtdr
dtd
dtvda P
PP
∧+∧=∧== ωω
ω
22tn aaaa +==
PP
P rdtrdve
dtdmas
∧=== ωω
α
( )PP rra ∧∧+∧= ωωα

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 25
Exemplo: Um sistema de transmissão é constituído por dois discos A e B. O disco A actua sobre o disco B que provoca o enrolamento da corda; com isto faz subir o bloco C. Se inicialmente o disco A tiver velocidade angular de ωA=8 rad/s e uma desaceleração de αA = -1.5 rad/s2, determinar qual a velocidade e aceleração do bloco C ao fim de 2 s .
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
=∧=
08.00
001.0
800
AAP Rv
ω
100 mm
Aω
A
C
200 mm
B
50 mm
P
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=∧=
08.00
BBP Rv
ω
C
200 mm
B
50 mm
y Bω
x
Pv
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
002.0
00
08.00
Bω
sradB /400
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=ω
100 mm
Aω
Ax
y
• Velocidade

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 26
C
200 mm B
50 mm
y Bω
x
smRv CBC /02.00
0005.0
400
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=∧=
ω
100 mm
Aα
A
( ) 2/015.00
001.0
5.100
smRa AAtP⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=∧=
α
x
y
( )⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=∧=
015.00
BBtP Ra
α
75.0002.0
00
015.00
B
B
=α⇒⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
α−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
2B s/rad
75.000
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
=α
• Aceleração
C
200 mm
B
50 mm
y
x
( )tPa
Bα

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 27
C
200 mm
B
50 mm
y Bα
( ) 2/00375.00
0005.0
75.000
smRa CBtC⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
=∧=
α
As equações paramétricas para o movimento uniformemente retardado do bloco C podem ser escritas:
s/m125.0)2(*0375.02.0v
tavv
s2ty
yoyy
=−=
+=
=
O movimento do bloco é caracterizado por possuir uma aceleração constante durante o movimento, pelo que esta é igual à aceleração inicial e vale:
2y s/m0375.0a −=

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 28
Movimento Geral no Plano
A1
B1
A2
B2
Posição inicial Posição final
O movimento geral no plano pode ser sempre decomposto no movimento em translação e num movimento relativo de rotação. A partir do exemplo anterior é apresentado graficamente esse princípio.
Na representação anterior o movimento foi decomposto num movimento de translação até fazer coincidir os pontos A1 com a posição do ponto A2; de seguida aplicou-se o movimento de rotação em torno do ponto A2 de forma a obter a configuração da posição final do corpo. Assim pode definir-se o movimento do ponto B como a soma de um movimento de translação mais um movimento relativo em rotação.
A1
B1
Posição inicial
A2
B2
Posição final
B2’
Translação θAB Rotação
Ar
Ar
ABr
A partir da derivada em ordem ao tempo do vector posição obtêm-se respectivamente para a primeira e segunda derivadas, a expressão da velocidade e da aceleração.
BAAB rrr /+=

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 29
Ø Velocidade
Ø Aceleração
A1
B1
Posição inicial
A2
B2
Posição final
B2’
Translação ωAB Rotação ABr
A1
B1
Posição inicial
A2
B2
Posição final
B2’
Translação ωAB αAB
Rotação ABr
( )tA/Ba
( )nA/Ba
Na figura seguinte estão representados graficamente a aceleração absoluta e a aceleração relativa, com componentes tangencial e normal.
Na figura seguinte representa-se graficamente as componentes da velocidade absoluta VA e da velocidade relativa VB/A.
As componentes da aceleração relativa (tangencial e normal) definem-se a seguir:

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 30
A barra AB está a rodar com a velocidade angular constante de ωΑΒ =6 rad/s, Sabendo que o ângulo θ=45º, determine as velocidades angulares BC e CD.
A
A barra AB possui um movimento de rotação em torno do ponto A. A velocidade no ponto B é definida decompondo o movimento geral em movimento de translação e no movimento relativo de rotação. Assim a velocidade do ponto B é definida:
B
x
y
ωAB
30º
A barra BC possui movimento geral no plano. A velocidade no ponto C é uma combinação da velocidade de translação de B e uma velocidade relativa de C em relação a B (Velocidade de rotação). Neste caso a velocidade no ponto C é definida da seguinte forma:
C B
x
y
C x
y
ωBC +
Translação Rotação
B -fixo C x
y
ωBC
Movimento Geral
=

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 31
A barra CD possui um movimento de rotação no ponto D. A velocidade no ponto C corresponde a uma velocidade de C em relação a D (Velocidade de rotação). Assim pode escrever-se a seguinte expressão:
D
C
45º ωCD
x
y
Como o ponto C é comum às barras BC e CD, então, este, deve ter as mesmas componentes de velocidade em ambas as barras. Impondo esta condição obtém-se:

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 32
No instante mostrado, a barra CD tem uma aceleração angular αCD=5 rad/s2 e uma velocidade angular ωCD=2 rad/s2 . Pretende-se saber qual a velocidade e a aceleração angular da barra AB.
Ø Velocidade
D
C
60º
ωCD
x
y
C B
x
y
C-fixo x
y
ωBC +
Translação Rotação
B C x
y
ωBC
Movimento Geral
=
A barra CD temi movimento de rotação centrado no ponto D.
A barra BC tem movimento geral no plano, (simultaneamente movimento de translação e movimento de rotação).

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 33
A
B
x
y ωAB
45º
A barra AB sofre um movimento de rotação em torno do ponto A.
Pela igualdade da velocidade no ponto B entre as barras AB e BC, obtém-se:
Ø Aceleração
D
C
60º
αCD
x
y
ωCD
A barra CD tem movimento de rotação centrado no ponto D.

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 34
C B
x
y
C-fixo x
y
ωBC +
Translação Rotação
B C x
y
ωBC
Movimento Geral
=
A barra BC possui movimento geral no plano, simultaneamente movimento de translação e movimento de rotação.
αBC αBC
A x
y
ωAB 45º
A barra AB tem movimento de rotação em torno do ponto A.
αAB
B
B

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 35
Por igualdade das acelerações no ponto B, obtém-se:
D
C
60º
B
A x
y
45º

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 36
3.2 - Movimento no espaço ; Rotação em relação a um ponto fixo
Quando um corpo gira em relação a um ponto fixo (por ex. o movimento de um pião), o vector velocidade angular não permanece fixo. De facto, para qualquer instante de tempo, um corpo com um ponto fixo gira instantaneamente em relação a um eixo que passa pelo ponto fixo (isto já foi referido anteriormente). Para ajudar à visualização do conceito de eixo instantâneo de rotação, daremos um exemplo específico. A figura seguinte representa um rotor cilíndrico, feito de plástico claro, contendo partículas escuras espalhadas por todo o seu volume. O rotor gira em relação ao seu eixo com velocidade angular constante ω1, e o seu eixo, por sua vez, gira em relação ao eixo vertical fixo com velocidade angular também constante ω2 nos sentidos indicados.
n
o
A
P
ω2
ω1 v1
v2
Se o rotor for fotografado num dado instante durante o seu movimento, a fotografia mostraria uma linha forte de pontos pretos, indicando que a sua velocidade, instantaneamente , seria nula. Tal linha de pontos sem movimento estabelece a posição instantânea do eixo de rotação O – n. Qualquer ponto desta linha, tal como A, teria componentes de velocidade iguais e opostas, v1 e v2 devido a ω2. Todos os outros pontos, tais como P, apareceriam fora do foco, e o seu movimento mostraria manchas com a forma de pequenos aros circulares em planos perpendiculares ao eixo O – n. Sendo assim, todas as partículas excepto aquelas sobre a linha O – n, giram em arcos circulares relativamente ao eixo instantâneo de rotação. Se fosse tirada uma sucessão de fotografias, observaríamos que o eixo de rotação seria definido por uma nova série de pontos pretos, e que o eixo teria mudado de posição, tanto no espaço com em relação ao corpo. Resumindo, diremos que para a rotação de um corpo rígido em relação a um ponto fixo, o eixo de rotação não é uma linha fixa no corpo.

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 37
3.2.1 – Cones do corpo e espacial
Ainda em relação ao cilindro de plástico, o eixo instantâneo de rotação O – n gira num cone circular recto em relação ao eixo do cilindro designado por cone do corpo. Como o cilindro gira também em relação ao eixo vertical, o eixo instantâneo de rotação gera também um cone circular recto em relação ao eixo vertical designado por cone espacial. A figura seguinte, caso particular em que as velocidades angulares são constantes, mostra que o cone do corpo rola sobre o cone espacial.
O
n ω
A
Cone do corpo
Cone espacial
3.2.2 – Aceleração angular
A aceleração angular α de um corpo rígido em movimento tridimensional é a derivada em relação ao temo da velocidade angular, α = dω/dt. Contrastando com o caso de rotação num plano único, em que o escalar α media apenas a variação no módulo da velocidade angular, no movimento tridimensional o vector α reflecte não só variação no módulo mas também a mudança de direcção do vector ω. A aceleração angular é um vector que, no caso particular de ω ser constante, é perpendicular a ω. Com efeito, se fizermos Ω representar a velocidade angular com que o vector ω propriamente dito gira (isto é, precessa) ao formar o cone espacial, a aceleração angular que mede a variação da direcção do vector ω pode ser escrita como:
ωα
∧Ω=

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 38
Cone do corpo
O
rrv
∧=ω
Cone espacial
O
ω
ωα
∧Ω=
A única diferença entre o caso de rotação em relação a um eixo fixo e rotação em relação a um ponto fixo reside no facto de que, para a rotação em relação a um ponto fixo, a aceleração angular α tem uma componente normal a ω devido à variação da direcção de ω, bem como uma componente na direcção de ω, reflectindo as mudanças no módulo de ω. Por outro lado, para a rotação em relação a um eixo fixo, α tem apenas componente, ao longo do eixo fixo, reflectindo a variação do módulo de ω. Além disso, pontos do eixo fixo de rotação não têm, obviamente, velocidade nem aceleração.
Exemplo de aplicação: A carcaça do motor e o seu suporte giram em torno do eixo Z com velocidade angular constante (precesão) dθ/dt = 3 rad/s. O eixo do motor e o disco giram a 8 rad/s em relação à carcaça do motor, na direcção mostrada. Se β for constante e igual a 30º, determine a velocidade e a aceleração do ponto A no topo do disco, e a aceleração angular α do mesmo sabendo que:
sradsradmmrmmhmmmm
/3;/8120150300350
1
==
=
=
=
=
θγ
A
z
B
Z
X Y x
y
O
h
r β
γθ1

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 39
Velocidade:
BABA vvv +=
Na resolução que se segue, iremos projectar todas as grandezas vectoriais no referencial móvel (i.é, o refal. Oxyz ) que designaremos por Ox2 y2 z2 enquanto que o referencial fixo, (ou seja, o refal. OXYZ ) será designado por Ox1 y1 z1 . Sendo assim, a matriz de transformação de coordenadas entre os dois referenciais, ou seja a matriz que projecta o referencial Ox1 y1 z1 no referencial Ox2 y2 z2 tem a forma:
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
=
ββ
ββ
cossin0sincos0001
12T
Assim, Virá:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
=∧=∗
0005.1
00
000
cossin0sincos0001
21
θ
θββ
ββω
hrv SBB
Além disso designaremos por:
γωθω == 21 ;
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−
=
∧+∧=∗
βθ
βθ
θββ
ββω
ωω
cossin0
00
cossin0sincos0001
,
2
2
1
21
S
BABASBA
onde
rrv

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 40
Ficará:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧ +−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧ −
=
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=∗
00361.0
00
)cossin(
00
00
cossin
0
0
00
cossin0
11
11
γββθγβθβθ
γ
βθ
βθ
rrrrv
rrv
BA
BA
Logo,
smvA /00689.0
00361.0
0005.1
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
=
Aceleração:
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−⋅
−⋅=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
∧+∧∧+∧∧=∗
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
=∧∧=∗
+=
===
899.056.10
)sincossin()coscossin(
00
cossin0
cossin0
2)()(
575.1728.20
sincos0
00
cossin0
)(
21
2
21
21
12211
2
2
11
22
2
βββθ
βββθ
βθ
βθ
βθ
βθ
ωωωωω
βθ
βθ
θ
βθ
βθ
ωω
rr
ra
vrra
a
ra
aaa
tr
a
Srel
a
BA
a
SBABA
B
SBB
BABA
correltr

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 41
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=∗
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
=⇒⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=∗
=
88.299.40
sin2cos20
00
cossin0
2
68.700
00
00
0
00
0
0
0
0
21
βγθ
βγθ
γ
βθ
βθ
γ
γ
γγγ
rr
ra
ra
r
ra
cor
rel
v
rel
rel
Finalmente,
222
2
12.8)086.8()702.0(
/086.8702.00
88.299.40
68.700
899.056.10
575.1728.20
sma
sma
A
A
=−+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=
A z
B
Z
X Y x
y
O β
γθ
Aa
702.0
086.8
Aceleração angular:
2
211
/008.20
00cos
0
0
cossin0
cossin0
)(2
sm
S
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
=
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
=+∧=
βγθ
α
γ
βθ
βθ
βθ
βθα
ωωωα

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 42
4 – Cinemática de massas
4.1 - Introdução
Para o estudo da dinâmica do sólido, que constitui o objectivo final desta disciplina, vai ser necessário estabelecer as relações que existem entre forças aplicadas aos sólidos e os movimentos que estes vão ter. Nestas relações intervêm, directa ou indirectamente, a massa, o modo como esta se distribui no espaço e as distribuições espaciais de velocidades e acelerações dos sistemas materiais.
Caracterizar-se-ão, neste capítulo, os sistemas de vectores “quantidade de movimento” e “quantidade de aceleração”, em cuja definição intervém a massa e a velocidade ou aceleração, respectivamente. Caracterizar-se-á ainda a “energia cinética” dos sistemas materiais. A compreensão deste capítulo é fulcral para o domínio das matérias que se lhe seguirão.
4.2 – Torsor das quantidades de Movimento
4.2.1 - Definições
Por vezes interessa considerar apenas a grandeza, direcção e sentido de um vector. Diz-se então que este é um vector livre.
V V
Outras vezes, interessa saber também qual a recta suporte do vector.
1V
2V
1V
Os vectores V1 são o “mesmo vector”; V1 e V2 são “equipolentes” , ou “iguais” mas não são o “mesmo” vector. Designam-se tais vectores por vectores deslizantes. A um conjunto de vectores deslizantes chama-se torsor. Outras vezes ainda, interessa (não só a grandeza, direcção, sentido e recta suporte, mas também) o ponto de aplicação (por ex., no estudo da deformação de um sólido: a sua deformação depende do ponto de aplicação da força).

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 43
Interessa agora definir os elementos característicos de um torsor. Considere-se um torsor (conjunto de forças, ou velocidades, p.ex.) e um ponto O no espaço. Sejam Vi o conjunto de vectores deslizantes que constituem o torsor. Chama-se vector principal, ou vector soma, V do torsor ao vector livre definido por:
∑=i
ivV
Chama-se momento resultante em relação a O Mo ao vector cuja linha de acção passa em O e tal que
)(∑∑ =∧=i
ioi
iio vMvrM
O
1r
2r
ir
1v
2v
iv
oM
oM
V
e são os elementos característicos dos torsor em O.
No caso de o vector genérico que tem vindo a ser apresentado, se tratar da velocidade de um ponto material P, então define-se “quantidade de movimento” de um ponto material, como um vector proporcional à sua velocidade, sendo a massa o factor de proporcionalidade.
Define-se “momento cinético” de um ponto material em relação a um dado pólo (ponto O), como o momento em relação a esse pólo, do vector quantidade de movimento acima definido.
vmq =
m
qOPho
∧=→
d y
z
x
o
P
→
OP
A – Ponto material isolado

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 44
B – Sistema material contínuo (rígido)
Para uma distribuição contínua de massa, admite-se que os sistemas são constituídos por um número infinito de pontos materiais discretos, aos quais se associa uma massa elementar “dm”. Os vectores quantidade de movimento e momento cinético num ponto, terão definição análoga, apenas substituindo o somatório (sistema discreto de pontos materiais) por um integral estendido à massa total do sistema material.
Vector quantidade de movimento - Q
GMMG
MM G
M GM GPGM
vMdmGPdmvQ
dmGPdmvQ
dmGPvdmvvdmvQ
=∧+=
=∧+=
=∧+=+==
∫∫
∫∫
∫∫∫
→
→
→
ω
ω
ω )()(
dmvGPOGdmvOPH
dmvQ
MMo
M
∫∫
∫
∧+=∧=
=
→→→
)(
Nota :
Mdm
massadecentroao
nterelativameestáticomomentodmGP
M
M
=
→=
∫
∫→
0
Conclusão : Qualquer que seja o tipo de distribuição de massa, teremos sempre
GvMQ =
r
Y o
Z
dm
(M)
dmvQd =
oH
X
G P
Gr
x
y
z

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 45
Vector momento cinético em O - oH
dmGPGPvMOG
dmGPGP
vdmGPdmGPOGdmvOG
dmGPGP
dmvGPdmGPOGdmvOG
dmGPvGPOG
dmvOPH
MG
M
GMMMG
M
GM MMG
M G
Mo
)(
)(
)(
)(
)()(
→→→
→→
→→→→
→→
→→→→
→→→
→
∧∧+∧=
∧∧+
∧⎟⎠
⎞⎜⎝
⎛+⎟⎠
⎞⎜⎝
⎛∧∧+∧=
∧∧+
∧+∧∧+∧=
∧+∧+=
∧=
∫
∫
∫∫∫
∫
∫ ∫∫
∫
∫
ω
ω
ω
ω
ω
ω
no entanto,
[ ]{ }ωω
ω
ω
ω
ωωω
ωωω
ωωω
ωω
ωω
ωω
ω
ω
ω
ω
ω
ω
ω
G
z
y
x
zzyzxz
yzyyxy
xzxyxx
M
yzMMzzM
xzMMyyM
xyMMxxM
zyx
zyx
zyx
yx
xz
zy
z
y
x
z
y
x
MM
IIIIIIIIII
dmGPGP
virá
IdmyzdmzyIdmyx
IdmxzdmzxIdmzx
IdmxydmyxIdmzy
mas
yxyzxzzyzxxyzxyxzy
xyzxyz
zyx
zyx
zyx
contudo
dmzyx
zyx
dmGPGP
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−−
−−
=∧∧
−=−=−=+
−=−=−=+
−=−=−=+
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
++−−
−++−
−−+
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−
−
−
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎟⎟⎟
⎠
⎞
⎜⎜⎜
⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=∧∧
→→
→→
∫
∫∫∫
∫∫∫
∫∫∫
∫∫
)(
;)(
;)(
;)(
,
)()(
)(
,
)(
22
22
22
22
22
22

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 46
Assim, ficará:
[ ]{ }
[ ]{ } QOGHHouQOGIH
ouvMOGIH
Go
H
Go
GGo
G
∧+=∧+=
∧+=
→→
=
→
,ω
ω
dmyxdmrI
dmzxdmrI
dmzydmrI
zzz
yyy
xxx
∫ ∫∫ ∫∫ ∫
+==
+==
+==
)(
)(
)(
222
222
222
O momento cinético de um sistema contínuo, num dado ponto O, pode ser obtido pela soma das seguintes duas parcelas:
1ª resulta da multiplicação da matriz de inércia do sistema, definida no seu centro de massa [IG], pelo vector velocidade angular (caso o corpo esteja a a rodar em torno de um eixo que passe por G, obviamente).
2ª é o produto vectorial do vector posição do centro de massa OG, pelo vector quantidade de movimento do sistema Q.
Este resultado já era esperado. Com efeito, conhecido o vector principal e o vector momento em G de um sistema de vectores deslizantes, podemos calcular o vector momento num outro ponto qualquer, utilizando a expressão fundamental dos campos dos momentos que acabou de se escrever. Tal equação traduz o conhecido primeiro teorema de Koenig e é de uso muito frequente no cálculo de vectores momento cinético.
y
z
dm
x
G x y
z
rz
rx ry
(M)

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 47
4.3 – Torsor das quantidades de aceleração
4.3.1 - Definições
A – Ponto material isolado
Define-se “quantidade de aceleração” de um ponto material P, como um vector igual ao produto da massa pelo seu vector aceleração.
O momento em relação a um dado ponto O desse vector, chama-se “momento dinâmico em O” do ponto material P.
amq =
m
amOPko
∧=→
d y
z
x
o
P
→
OP
B – Sistema material contínuo
Numa distribuição contínua de massa, o torsor das quantidades de aceleração terá definição semelhante, bastando apenas substituir um somatório (associado à contribuição de vários pontos materiais) por um integral estendido a toda a massa.
r
Y o
Z
dm
(M)
dma
oKX
G P
Gr
x
y
z
∫= MdmaQ
∫ ∧=→
Mo dmaOPK

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 48
4.3.2 – Vector quantidade de aceleração - Q
Qualquer que seja o tipo de distribuição de massa (discreta ou contínua), é sempre possível calcular o vector principal deste torsor, multiplicando a massa total pela aceleração do centro de massa. Com efeito, tem-se:
GGMMMaMvM
dtddmv
dtddmv
dtddmaQ ===== ∫∫∫ )()(
4.3.3 – Vector momento dinâmico em O - oK
∫∫∫
∫
∫
∫∫∫
∫∫∫
∫∫
∫
→→→→→→
→
=
→→→
→→→→→
→→→→→
→→→→→→
→→→
→
∧∧=∧∧∧+∧∧
=
∧∧+∧=
=∧∧∧+∧∧+∧⎟⎠
⎞⎜⎝
⎛+
+⎟⎠
⎞⎜⎝
⎛∧∧∧+∧∧+∧=
∧∧+∧+∧+=+∧+=
+=+=
∧=
MMM
M
K
MG
MMGM
MMMG
M GM GPGo
GPG
Mo
dmGPGPdtddmGPGPdmGPGP
dmGPNota
dmGPGPdtdaMOG
dmGPGPdmGPGPadmGP
dmGPOGdmGPOGdmaOG
dmGPGPaGPOGdmaaGPOGK
então
aaaGPOGOP
contudo
dmaOPK
G
])(])([)(
0:
])(
])([)(
])([)()()(
,
)(;)(
,
ωωωω
ω
ωωω
ωωω
ωωω
Então,
G
H
G aMOGKKG
∧+=→
=
0

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 49
Esta última expressão, traduz o 2º teorema de Koenig e é muito utilizada no cálculo dos momentos dinâmicos como se verá adiante. Caso o sistema material seja constituído por uma associação de corpos rígidos, poderá calcular-se o momento cinético e o dinâmico de cada um deles no respectivo centro de massa, transpô-lo para o mesmo ponto e fazer então o respectivo somatório, obtendo-se assim os momentos cinético e dinâmico do corpo como um todo.
4.3.4 – Componentes do vector momento dinâmico em G, de um sólido rígido
[ ]{ } [ ] { }⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−−
−−
==
z
y
x
zzyzxz
yzyyxy
xzxyxx
GGG
IIIIIIIII
IIHω
ω
ω
ωω ;;
No caso mais geral, teremos a seguinte situação:
Admitindo como opção lógica, que o referencial Gxyz é tal que a matriz de inércia é constante (em geral este referencial estará rigidamente ligado ao sólido), obtém-se:
}){][(}{}{][
])([)(])(}){][(}{}{][
ωωω
ωωωω
ωωω
GGG
I
M
I
M
HK
M
IIK
dmGPGPdmGPGPdmGPGPdtd
GGGG
∧+=
∧∧∧+∧∧=∧∧
∧=
→→
=
→→
==
→→
∫∫∫
No caso particular de o referencial Gxyz corresponder aos eixos centrais principais de inércia do sólido, então
[ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
1
1
1
000000
z
y
x
G
II
II

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 50
4.4 – Energia cinética de um sistema material
4.4.1 - Generalidades
A energia cinética, energia acumulada por um corpo em movimento, pode ser encarada, como mais tarde se verá, como uma função potencial de que derivam as chamadas “forças de inércia” associadas a esse corpo.
Trata-se de uma grandeza escalar, cuja definição matemática, no âmbito do ponto material, já é de todos conhecida:
2
21 vmT =
Mais adiante, quando os conceitos de trabalho e energia forem estudados, esta expressão será justificada. Num sistema contínuo, consideram-se um número infinito de pontos materiais, cuja energia cinética global será:
∫=M
dmvT 2
21
y
z
dm
x
G (M)
P
Pv
4.4.2 – Energia cinética de um sólido em translação
( )
2
222
22
21},,{
21
21
21
21
G
zyx
z
y
x
zyx
v
GGG
G
G
G
GGG
GGMGM G
vvvMvvv
vvvM
vvMdmvdmvT
=
++=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
=⋅=== ∫∫
A energia cinética de um sólido em translação é exactamente igual à energia que um ponto material desse sólido (i.é, o centro de massa) teria, se nele estivesse concentrada toda a sua massa M.
Gv
G

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 51
4.4.2 – Energia cinética de um sólido em rotação
2
222
21
21)sin(
21
)()(21
ω
ωθω
ωω
Δ
→→
=
==
=∧⋅∧=
∫∫
∫
IT
dmrdmR
dmOPOPT
MM
M
A expressão de cálculo da energia cinética é agora formalmente idêntica à correspondente ao movimento de translação, sendo a massa substituída pelo momento de inércia em relação ao eixo de rotação e a velocidade linear pelo vector velocidade angular ou vector rotação ω.
4.4.3 – Energia cinética de um sólido em movimento qualquer
Δ
dm P
Pv
θ R
r
O (M)
ω
Um movimento arbitrário de um corpo rígido pode ser sempre decomposto na soma de um movimento de translação com o centro de massa, com um movimento de rotação em torno deste ponto. Fazendo esta decomposição de movimentos, a expressão de cálculo da energia cinética toma a forma
O
Δ ω
r p dm
(M)
Pv
GvG
Z
Y
X
z
y
x
∫∫∫
∫→→→
→→
∧⋅+∧⋅∧+=
=∧+⋅∧+=
MMM G
GM G
dmGPvdmGPGPdmv
dmGPvGPvT
)()()(21
21
)()(21
2 ωωω
ωω
Atendendo a que, na última parcela, vG e ω são constantes em relação à massa, esta anula-se, visto conter o factor “momento estático em ralação ao centro de massa”. A primeira e segunda parcelas podem ser transformadas de modo semelhante ao que foi feito na secção anterior. Assim,
222GMGM G vMdmvdmv == ∫∫
222)()( ωωωω GMMIdmrdmGPGP Δ
→→
==∧⋅∧ ∫∫

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 52
dando origem à seguinte forma de cálculo da energia cinética,
22
21
21
ωGG IvMT Δ+=
Esta expressão traduz o “3º Teorema de Koenig” e permite decompor a energia cinética de um sólido com movimento qualquer, em apenas duas parcelas: a energia correspondente à translação do centro de massa e a energia de rotação em torno do centro de massa.
É importante referir que, para efeitos de cálculo, a parcela referente à energia de rotação o momento de inércia IΔG , deverá ser obtido a partir de momentos e produtos de inércia em relação aos eixos baricentricos Gxyz que passam pelo ponto G, do eixo de rotação. Com efeito, tem-se
( ) [ ]( )
{ }
{ }
zxxzzyyzyxxyzzzyyyxxx
zzzyyzxxz
zyzyyyxxy
zxzyxyxxx
zyx
z
y
x
zzyzxz
yzyyxy
xzxyxx
zyx
GGG
IIIIII
IIIIIIIII
IIIIIIIII
III
ωωωωωωωωω
ωωω
ωωω
ωωω
ωωω
ω
ω
ω
ωωω
ωωωωω
−−−++=
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+−−
−+−
−−
=
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−−
−−
−−
=
=⋅=⋅= ΔΔ
222
2
21
21
21
,,21
,,21
}{21
21
21
ou numa forma mais compacta:
[ ] }{}{21
21 2 ωωω G
tG II =Δ

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 53
Ou seja, tudo se passa como se houvesse uma projecção do vector momento cinético ([I] {ω}) na direcção do vector ω (obviamente colinear com o eixo de rotação). De facto, conhecida a matriz de inércia de um sólido, se quisermos obter o valor do seu momento de inércia ( IΔ ), na direcção de um dado eixo que tenha como co-senos directores l,m,n, faremos:
[ ] }{}{ λλ
II t=Δ
Onde o vector λ
, corresponde ao versor da direcção do eixo Δ, e que tem as seguintes componentes:
zyx nmlknjmil
θθθ
λ
cos;cos;cos ===
++=
Deste modo o 3º Teorema de Koenig pode ser escrito da modo mais compacto na seguinte forma:
[ ] }{}{21
21
ωω Gt
GG IvvMT +⋅=
Exemplo de aplicação:
O sistema mecânico representado na figura é constituído por:
Corpo 1 – Um veio de raio r, comprimento e massa m1, apoiado em duas chumaceiras planas A e B , que sob a acção de momento motor Mm roda em torno de um eixo horizontal X0 com velocidade angular θ e aceleração angular ⋅θ
Corpo 2 – Um disco de raio R, comprimento d e massa m2 , rigidamente ligado ao corpo 1 no ponto O.
Suponha conhecidas as matrizes de inéricia dos dois corpos, em relação a eixos centrais principais de inércia. Determine:
a) O torsor das Quantidades de Aceleração de cada corpo no respectivo centro de massa;
b) O torsor das Quantidades de Aceleração do mecanismo no ponto O;
c) A energia cinética do mecanismo.

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 54
G
θ
x1
z1 // z2
y1 A
B
ϕ + O
G2
x1
y1 y2
x2 a
A B
ϕ
mM θθθ ;;1
2
.2
2
1
cteOBOAaOG
GO
=
==
=
≡
ϕ
(excentricidade)
Resolução:
a) Corpo 1
00111 1
=== amamQ G
_ quantidade de aceleração
_ momento dinâmico
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⇒⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+=
∧+=
00
000
00
00
00
00
000000
00
11
11
1
1111
1
1
1
1111
111
111
111
11
111
θθθθ
θθ
ω
xx
SG
x
SGSG
z
y
x
SGSG
SGS
GSG
IIK
IHK
II
IHK
HHK
Iremos exprimir todas as grandezas no referencial S1 ( x1 , y1 , z1 ).

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 55
Corpo 2
_ quantidade de aceleração
_ momento dinâmico
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
⎟⎟⎟⎟
⎠
⎞
⎜⎜⎜⎜
⎝
⎛
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
∧∧+∧+=
=
=
ϕθ
ϕθ
ϕθ
ϕθϕθ
θ
ϕθ
ϕ
ϕθθ
ϕ
ϕθ
ωωω
coscos
0
0cos0
cos00
cos00
00
cos00
0cossin
00
00
0cossin
00
)(
2
222
2
22
0
0
22
2
2
2
2
amamQ
aaaa
a
aa
aa
a
OGOGaa
amQ
G
G
G
G
[ ]
[ ][ ]⎪
⎪
⎩
⎪⎪
⎨
⎧
=
=
=
∧+=
→
→
ωω
ω
ω
212
22
212
2
222
222
2212
121
212
T
IH
HTH
HHK
GSG
SGSG
SGS
GSG ϕ
ϕ
u1
v1
y1
x1
⎩⎨⎧
+−=
+=⇒
⎩⎨⎧
+−=
+=
ϕϕ
ϕϕ
cossinsincos
112
112
,2,22
,2,22
vuvvuu
vvvuuu
vu
vu

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 56
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
0sincos
00
1000cossin0sincos
2 ϕθ
ϕθθ
ϕϕ
ϕϕ
ω
[ ]
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⇔⎪⎩
⎪⎨
⎧
=
+−=
+=
→=
1
1
1
2
2
2
12
112
112
21
1000cossin0sincos
cossinsincos
zvu
zvu
zzvuvvuu
T
ϕϕ
ϕϕ
ϕϕ
ϕϕ
Por exemplo, a matriz de transformação de coordenadas do referêncial – 1 no referêncial – 2 pode ser obtida a partir da figura anterior. Ficará
Assim, teremos
[ ]
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
=
0
sin21
cos
0sincos
0sincos
000000
2
2
2
2
2
2
2
22
222
2
22
ϕθ
ϕθ
ϕθ
ϕθ
ϕθ
ϕθ
ω
x
x
y
x
z
y
x
SG
GSG
I
I
II
II
IH
IH
22222
222
21
xyzyz
zyx
IIIII
III
==⇒=
+=
→2xI
Notar que:
“momento polar de inércia”
De maneira inteiramente análoga, podemos obter a matriz de transformação de coordenadas do referencial – 2, no referencial – 1. Assim, ficará:
[ ] [ ]⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −
== →→
1000cossin0sincos
2112 ϕϕ
ϕϕtTT

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 57
[ ]2212
212
2SGSG HTH
→=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧+
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
+
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧+
=
∧+=
ϕθ
ϕθ
ϕθ
ϕθ
ϕθ
ϕθ
ω
2sin4
2sin4
)2cos3(4
2sin4
00
0
2sin4
)2cos3(4
22
2
222
2
2
2
2
2
2
12
121
212
x
x
x
x
x
x
SG
SGS
GSG
I
I
I
I
I
I
K
HHK
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧+
=⇒
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧+
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
−
+
=
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡ −
=
0
2sin4
)2cos3(4
0
2sin4
)2cos3(4
0
cossin2
cossin
sin2
cos
0
sin21
cos
1000cossin0sincos
2
2
12
2
2
12
22
22
2
2
12
22
22
2
ϕθ
ϕθ
ϕθ
ϕθ
ϕϕθϕϕθ
ϕθϕθ
ϕθ
ϕθ
ϕϕ
ϕϕ
x
x
SG
x
x
SG
xx
xx
x
x
SG
I
I
HI
I
H
II
II
I
I
H
⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
=
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧+
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=∧
ϕθ
ϕθ
ϕθθ
ω
2sin4
00
0
2sin4
)2cos3(4
00
2
2
2
2
2
12
x
x
x
SGI
I
I
H

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 58
b) Quantidade de aceleração total (do mecanismo)
21 QQQ +=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−+=
ϕθ
ϕθ
ϕθ
ϕθ
coscos
0
coscos
00
2
22
2
22
amam
amamQ
Momento dinâmico total do mecanismo no ponto O
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
+=∧+=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
==∧+=
+=
=
ϕθ
ϕθϕ
ϕ
θ
coscos
0
0cossin
00
2
2222
2
0
111
21
22
1
11
amama
aKQOGKK
IKQOGKK
KKK
GGo
x
GGo
ooo
[ ][ ]
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+
+
⎥⎦
⎤⎢⎣
⎡++
=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
+
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧+
=
ϕθ
ϕθ
ϕϕθ
ϕθ
ϕθ
ϕθ
ϕθ
ϕθ
ϕθ
2sin2
2sin2
cos)2cos3(4
2sin2sin
cos
2sin4
2sin4
)2cos3(4
222
2
222
222
2
2222
1
222
1
222
2
2
2
2
2
2
2
2
am
am
amI
K
amamam
I
I
I
K
x
x
I
I
x
o
x
x
x
o

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 59
Se por exemplo, for 30;5
;20;2;25.1;401
22 ====== ϕ
RacmRcmrmmkgm
e para um determinado instante se verificar que, 215.;290 sradcterpm === θθ
ficará:
srad
ma
mkgrmI
mkgRmI
x
x
37.30602290
04.0
104.621
8.021
2321
222
1
2
=×
=
=
⋅×==
⋅==
−
πθ
então,
mNKNQ o ⋅⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−=
314.185014.3316.11
;1.20
12780
[ ][ ]
⎪⎪⎪
⎭
⎪⎪⎪
⎬
⎫
⎪⎪⎪
⎩
⎪⎪⎪
⎨
⎧
+
+
⎥⎦
⎤⎢⎣
⎡+++
=
ϕθ
ϕθ
ϕϕθ
2sin2
2sin2
cos)2cos3(4
222
2
222
222
0
2
2
21
am
am
amI
I
K
x
x
I
I
xx
Então:
c) Energia cinética do mecanismo
Corpo - 1
21 TTT +=
{ } { }ωω ][21)(
21
111
0
11 Gt
GG IvvmT +⋅=
=

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 60
{ }
{ } 211
1
1
1
1
1
1
21
000,0,
21
00
000000
0,0,21
θ
θ
θ
θ
θ
x
x
z
y
x
ITI
T
II
IT
=⇒⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
=
Corpo - 2
{ } { }
{ }
{ } { } { }
{ } { } { }⎪⎪⎭
⎪⎪⎬
⎫
⎪⎪⎩
⎪⎪⎨
⎧
−−=
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
−⎥⎥⎥
⎦
⎤
⎢⎢⎢
⎣
⎡
−=
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⋅
⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧−
∧⎪⎭
⎪⎬
⎫
⎪⎩
⎪⎨
⎧
=∧=
+⋅=
0
sin21
cos
0,sin,cos][
0sincos
000000
0,sin,cos][
)cos(cos00
cos,0,0
cos00
0cossin
00
][21)(
21
2
2
2
2
2
2
2
22
2
222
22
22
2
2
2222
ϕθ
ϕθ
ϕθϕθωω
ϕθ
ϕθ
ϕθϕθωω
ϕθ
ϕθ
ϕθ
ϕθ
ϕ
ϕθ
ω
ωω
x
x
Gt
z
y
x
Gt
GG
G
Gt
GG
I
I
I
II
II
aa
avv
aaa
OGv
IvvmT

Física 1 Universidade do Minho
Departamento de Física
(2008)
(Cinemática da Partícula e de Mecanismos)
Joaquim Carneiro 61
{ } { }
{ } { }
[ ]
JT
T
IIamT
IamIT
IamT
então
III
III
xx
T
x
T
x
x
xxG
t
xxGt
91.347)77.32514.22(
37.30)60cos3(8.025.0104.621)30cos04.037.30(
240
)2cos3(41
21)cos(
21
)2cos3(8
)cos(21
21
)2cos3(8
)cos(21
,
)2cos3(4
)sin21(cos][
)sin(21)cos(][
232
222
222
2
2222
222222
2222
21
2
2
1
1
2
222
222
=+=
×+×+×+××=
⎥⎦
⎤⎢⎣
⎡ +++=
+++=
++=
+=+=
⎥⎦
⎤⎢⎣
⎡ +=
−
==
θϕϕθ
ϕθϕθθ
ϕθϕθ
ϕθϕϕθωω
ϕθϕθωω
Recommended