Cours 4 : Analyse de stabilité et de performances des systèmeslinéaires bouclés
Olivier Sename
GIPSA-lab
Septembre 2017
Olivier Sename (GIPSA-lab) Asservissement Septembre 2017 1 / 26
1 Objectifs
2 Stabilité
3 Stabilité d’un asservissementcritère de Routhcritère de Nyquist
4 Marges de stabilité
5 PrécisionSans perturbationSans consigne
6 Rapidité
O. Sename [GIPSA-lab] 2/26

Objectifs
Objectif de la commande (cahier des charges)
• Stabilité• Précision• Rapidité• Rejet de perturbation• Désensibilisation vis-à-vis des variations paramétriques (robustesse).
Agir sur un système dynamique afin d’obtenir les performances désirées avec un coût acceptableet malgré les incertitudes et les contraintes.
O. Sename [GIPSA-lab] 3/26

Stabilité
Stabilité d’un système linéaire
Soit le système linéaire de fonction de transfert :
G(s) =N(s)
D(s)do(N(s)) ≤ do(D(s)) = n
Son dénominateur est : D(s) = an(s− s1) · · · (s− sn)La transformée de Laplace de sa réponse impulsionnelle est :
Y (s) =N(s)
an(s− s1) · · · (s− sn)
Y (s) =c1
s− s1+ · · ·+
cn
s− sn
y(t) = c1es1t + · · ·+ cne
snt
• racine simple : ciesit
• racine multiple : cql tl−1
(l−1)!esrt avec l = q, q − 1, · · · 1
• racine complexe conjuguée : Aeαt cos(ωt+ φ)
O. Sename [GIPSA-lab] 4/26
Stabilité
Stabilité asymptotique
Le système défini par la fonction de transfert G(s) est asymptotiquement stable (y(t)→ 0) si tousles pôles de sa fonction de transfert sont tels que :
<e(si) < 0 i = 1 · · ·n
Remarques
• Si la réponse impulsionnelle converge vers 0, le système est asymptotiquement stable.• Si la réponse impulsionnelle reste bornée sans converger vers 0, le système est stable.• Si la réponse impulsionnelle diverge alors le système est instable.
Cas des pôles imaginaires purs
• G(s) a une paire de pôles imaginaires purs conjugués• G(s) a plusieurs paires de pôles imaginaires purs conjugués• l’intégrateur pur 1/s est un système stable mais non asymptotiquement stable.
O. Sename [GIPSA-lab] 5/26
Stabilité d’un asservissement
Stabilité d’un asservissement
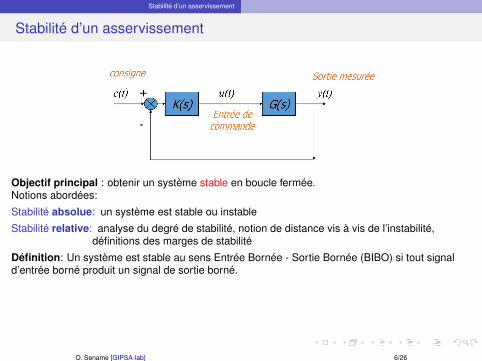
Objectif principal : obtenir un système stable en boucle fermée.Notions abordées:
Stabilité absolue: un système est stable ou instable
Stabilité relative: analyse du degré de stabilité, notion de distance vis à vis de l’instabilité,définitions des marges de stabilité
Définition: Un système est stable au sens Entrée Bornée - Sortie Bornée (BIBO) si tout signald’entrée borné produit un signal de sortie borné.
O. Sename [GIPSA-lab] 6/26
Stabilité d’un asservissement
Etude de la stabilité d’un asservissement
O. Sename [GIPSA-lab] 7/26
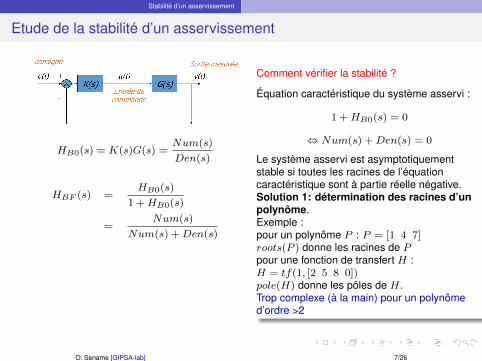
HB0(s) = K(s)G(s) =Num(s)
Den(s)
HBF (s) =HB0(s)
1 +HB0(s)
=Num(s)
Num(s) +Den(s)
Comment vérifier la stabilité ?
Équation caractéristique du système asservi :
1 +HB0(s) = 0
⇔ Num(s) +Den(s) = 0
Le système asservi est asymptotiquementstable si toutes les racines de l’équationcaractéristique sont à partie réelle négative.Solution 1: détermination des racines d’unpolynôme.Exemple :pour un polynôme P : P = [1 4 7]roots(P ) donne les racines de Ppour une fonction de transfert H :H = tf(1, [2 5 8 0])pole(H) donne les pôles de H.Trop complexe (à la main) pour un polynômed’ordre >2

Stabilité d’un asservissement critère de Routh
Solution 2: utiliser le critère algébrique de Routh
Utile si présence de paramètres formels dans l’équation caractéristique de paramètres .cf Formulaire pages 15-16.Watch https://www.youtube.com/watch?v=WBCZBOB3LCA
-
+
Quel est le domaine de stabilité pour kp et Ti ?
HB0(s) =kp(1 + Tis)
Tis(1 + s)2
HBF (s) =kp(1 + Tis)
kp(1 + Tis) + Tis(1 + s)2
Équation caractéristique :Tis
3 + 2Tis2 + Ti(kp + 1)s+ kp = 0
Condition de stabilité :kp > 0 Ti > 0 (kp + 1)Ti >
kp
2O. Sename [GIPSA-lab] 8/26
Stabilité d’un asservissement critère de Nyquist
Critère géométrique de Nyquist
Présentation
Le critère de Nyquist est une application du principe de l’argument pour les fonctions complexes.L’application pour l’étude de stabilité des systèmes asservis nécessite l’utilisation du contour deNyquist.L’application du théroème consiste à étudier la fonction complexe 1 +HBO(s) afin de déterminerle nombre de ses zéros instables (c-a-d appartenant au controur fermé), donc le nombre de polesinstables de HBF (s).
Enoncé du critère
Un système continu en boucle fermée à retour unitaire (HBF ) est asymptotiquement stable à lacondition nécessaire et suffisante que son diagramme de Nyquist en boucle ouverte (HBO)parcouru quand ω croît de −∞ à +∞ entoure le point critique (−1, 0) dans le senstrigonométrique un nombre N de fois égal au nombre P de pôles instables de la fonction detransfert en boucle ouverte.
Quelques docs intéressantes
Many lectures and videos on the web.https://www.youtube.com/watch?v=sof3meN96MA
O. Sename [GIPSA-lab] 9/26

Stabilité d’un asservissement critère de Nyquist
Tracé du diagramme de Nyquist
Le diagramme de Nyquist est obtenu en faisant parcourir à la variable complexe s le contour deNyquist :
• On connaît le lieu de HBO(s) dans le plan de Nyquist : ω = 0, ω →∞• Son symétrique par rapport à l’axe réel correspond à ω = −∞, ω → 0• Pour les systèmes physiquement réalisables : do(Num) < do(Den) et s→∞ (lieu du grand
cercle) a pour image HBO(ω =∞) = 0• valable si HBO(s) ne contient pas de pôles à l’origine (le contour C passe par l’origine etHBO(ω = 0) = K, gain statique du système en boucle ouverte).
O. Sename [GIPSA-lab] 10/26
Stabilité d’un asservissement critère de Nyquist
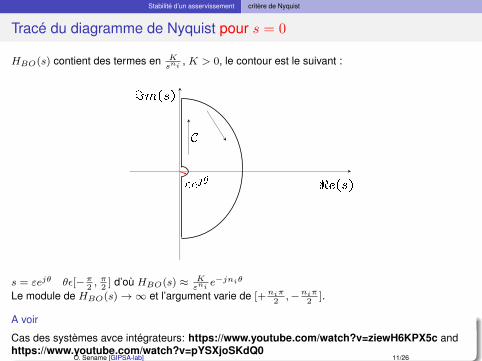
Tracé du diagramme de Nyquist pour s = 0
HBO(s) contient des termes en Ksni
, K > 0, le contour est le suivant :
s = εejθ θε[−π2, π2
] d’où HBO(s) ≈ Kεni
e−jniθ
Le module de HBO(s)→∞ et l’argument varie de [+niπ2,−niπ
2].
A voir
Cas des systèmes avce intégrateurs: https://www.youtube.com/watch?v=ziewH6KPX5c andhttps://www.youtube.com/watch?v=pYSXjoSKdQ0
O. Sename [GIPSA-lab] 11/26
Marges de stabilité
Marges de stabilité
• En pratique : la fonction de transfert est une approximation de la réalité• or, la limite théorique de la stabilité se fait par rapport au point critique (−1, j0) dans le plan
de Nyquist• Donc on prend des marges de sécurité :
1 Marge de gain: indique l’augmentation de gain du transfert de boucle ouverte qui amnèrerait laboucle fermée en limite de stabilité
2 Marge de phase: indique le retard de phase du transfert de boucle ouverte (HBO) qui amnèrerait laboucle fermée (HBF ) en limite de stabilité
3 Marge de module: indique la distance absolue minimale du transfert de boucle ouverte au point -1.4 Marge de retard: indique le retard que peut subir le transfert de boucle ouverte qui amnèrerait la
boucle fermée en limite de stabilité
• Avec des marges importantes, le système est robuste aux variations de la fonction detransfert.
O. Sename [GIPSA-lab] 12/26

Marges de stabilité
Marges de stabilité dans Bode
Bode Diagram
Frequency (rad/sec)
-60
-50
-40
-30
-20
-10
0
10
M g
Mag
nitu
de (
dB)
10-1 100 101-270
-225
-180
-135
-90
-45
0
Pha
se (
deg)
M φφφφ
O. Sename [GIPSA-lab] 13/26

Marges de stabilité
Marges de stabilité dans Bode
• Marge de gain :
MgdB = −[|HBO(jωπ |]dB ⇔Mg =1
|HBO(jωπ)|• Marge de phase :
Mφ = 180o + arg[HBO(jω1)]
ω1 étant la fréquence pour laquelle le gain est unitaire (OdB).• les systèmes du 1er et 2nd ordre dont les pôles sont à partie réelle négative ont une marge
de gain infinie car la phase n’atteint jamais −180o
• En pratique, on choisit des réglages tels que Mg ≈ 6→ 20dB et Mφ ≈ 45o → 60o
O. Sename [GIPSA-lab] 14/26

Marges de stabilité
Marges de stabilité dans Nyquist
Mg = 1|HBO(jωπ)|
, Mφ = arg[HBO(jω1)]− π), et Mretard = Mφω1
Marge de module (on demande en général: ∆M = minω |1 +GK(jω)| ≥ 0.5)
O. Sename [GIPSA-lab] 15/26
Marges de stabilité
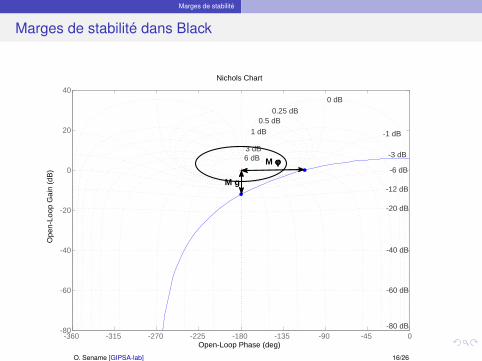
Marges de stabilité dans Black
Nichols Chart
Open-Loop Phase (deg)
Ope
n-Lo
op G
ain
(dB
)
-360 -315 -270 -225 -180 -135 -90 -45 0-80
-60
-40
-20
0
20
40
6 dB 3 dB
1 dB 0.5 dB
0.25 dB
0 dB
-1 dB
-3 dB
-6 dB
-12 dB
-20 dB
-40 dB
-60 dB
-80 dB
M g
M φφφφ
O. Sename [GIPSA-lab] 16/26
Précision
Présentation du problème de précision d’un asservissement
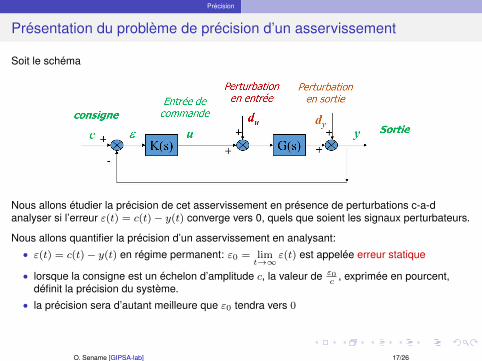
Soit le schéma
Nous allons étudier la précision de cet asservissement en présence de perturbations c-a-danalyser si l’erreur ε(t) = c(t)− y(t) converge vers 0, quels que soient les signaux perturbateurs.
Nous allons quantifier la précision d’un asservissement en analysant:• ε(t) = c(t)− y(t) en régime permanent: ε0 = lim
t→∞ε(t) est appelée erreur statique
• lorsque la consigne est un échelon d’amplitude c, la valeur de ε0c
, exprimée en pourcent,définit la précision du système.
• la précision sera d’autant meilleure que ε0 tendra vers 0
O. Sename [GIPSA-lab] 17/26

Précision
Précision
Exemple d’erreur de position Asservissement précis
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
0.2
0.4
0.6
0.8
1
nive
au
Temps
Régulation niveau du bac - Kv=1.2, Kr=1 et Kr=0.5
0 1000 2000 3000 4000 5000 6000 7000 8000 9000 100000
0.2
0.4
0.6
0.8
1
Temps
com
man
de
Kr=0.5Kr=1
0 5 10 15 20 25 30 35 40 45 500
0.2
0.4
0.6
0.8
1
1.2
nive
au
Temps
Régulation niveau du bac - Kv=1.2, P=215, I=53.7
0 5 10 15 20 25 30 35 40 45 50-50
0
50
100
150
200
250
Temps
com
man
de
O. Sename [GIPSA-lab] 18/26

Précision
Etude de la précision de l’asservissement
O. Sename [GIPSA-lab] 19/26
Equation de la sortie
Y (s) =G(s)K(s)
1 +G(s)K(s)C(s)
+G(s)
1 +G(s)K(s)Du(s)
+1
1 +G(s)K(s)Dy(s)
Puisque ε(s) = C(s)− Y (s) avec lanotation HBO(s) = G(s)K(s)
ε(s) = εc(s) + εdu (s) + εdy (s)
Ecart relatif à la consigne:
εc(s) =1
1 +HBO(s)C(s)
Ecart relatif à la perturbation en sortie
εdy (s) = −1
1 +HBO(s)Dy(s)
Ecart relatif à la perturbation en entrée
εdu (s) = −G(s)
1 +HBO(s)Du(s)
Surtout ne pas définir l’écart relatif à la perturbation comme D?(s)− Y (s) (on ne cherchepas à suivre la perturbation mais à la rejeter !) . Il s’agit bien de calculer l’erreur enasservissement (suivi de consigne) en présence d’une perturbation.

Précision Sans perturbation
Précision : cas avec consigne et sans perturbation (du = 0, dy = 0)
Objectif : Déterminer la précision en BF à partir de εc(s) = 11+HBO(s)
C(s)
Outil: appliquer le théorème de la valeur finale ε0 = limt→∞
ε(t) = lims→0 sεc(s)
Hypothèse : le système en boucle fermée est asymptotiquement stable.
Définition de la consigne
C(s) =C
sqq ≥ 1 C = Cste
Calcul de la Boucle Ouverte
Soit ni le nombre d’intégrateurs en boucle ouverte. Notons:
HBO(s) =K
sni
B(s)
A(s)avec B(s = 0) = 1 et A(s = 0) = 1
Calcul de l’erreur en régime permanent
ε0 = lims→0
[s.
1
1 +HBO.C
sq
]= lims→0
[1
1 +HBO.C
sq−1
]
O. Sename [GIPSA-lab] 20/26

Précision Sans perturbation
Précision : cas avec consigne et sans perturbation (du = 0, dy = 0)
O. Sename [GIPSA-lab] 21/26
ε0 = lims→0
C. sni−(q−1)
sni +KB(s)A(s)
= lim
s→0
[C.sni−(q−1)
sni +K
]
ε0 =
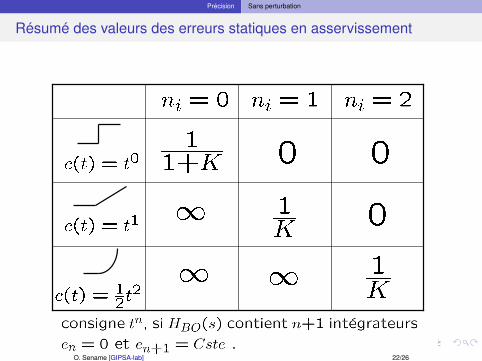
∞ si ni < (q − 1)Cste si ni = (q − 1)0 si ni > (q − 1)
Si ni = (q − 1)
ε0 =
{C
1+Ksi ni = (q − 1) = 0
CK
si ni = (q − 1) 6= 0
Attention: Si c(t) est un échelon;calcul de ε0
Cpour obtenir l’erreur en %
Quelques cas classiques:
• C(s) = Cs
càd entrée de type échelon : q = 1
1 Système sans intégrateur(HBO(s) = K
B(s)A(s)
): ni = 0 : ε0 = C1+K
2 Système avec un intégrateur : ni = 1 : ε0 = 03 Système avec deux intégrateurs : ni = 2 :
ε0 = 0
• C(s) = Cs2
càd entrée de type rampe: q = 2
1 Système sans intégrateur : ni = 0 : ε0 =∞2 Système avec un intégrateur : ni = 1 :
ε0 = CK
3 Système avec deux intégrateurs : ni = 2 :ε0 = 0
Précision Sans perturbation
Résumé des valeurs des erreurs statiques en asservissement
O. Sename [GIPSA-lab] 22/26
Précision Sans consigne
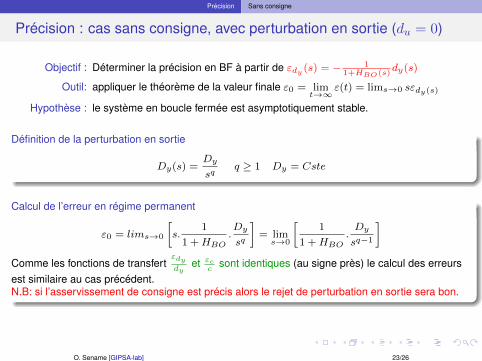
Précision : cas sans consigne, avec perturbation en sortie (du = 0)
Objectif : Déterminer la précision en BF à partir de εdy (s) = − 11+HBO(s)
dy(s)
Outil: appliquer le théorème de la valeur finale ε0 = limt→∞
ε(t) = lims→0 sεdy(s)
Hypothèse : le système en boucle fermée est asymptotiquement stable.
Définition de la perturbation en sortie
Dy(s) =Dy
sqq ≥ 1 Dy = Cste
Calcul de l’erreur en régime permanent
ε0 = lims→0
[s.
1
1 +HBO.Dy
sq
]= lims→0
[1
1 +HBO.Dy
sq−1
]Comme les fonctions de transfert
εdydy
et εcc
sont identiques (au signe près) le calcul des erreursest similaire au cas précédent.N.B: si l’asservissement de consigne est précis alors le rejet de perturbation en sortie sera bon.
O. Sename [GIPSA-lab] 23/26
Précision Sans consigne
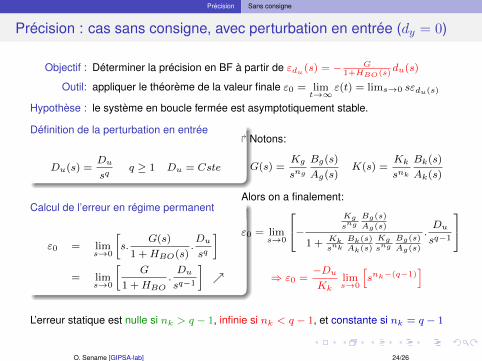
Précision : cas sans consigne, avec perturbation en entrée (dy = 0)
Objectif : Déterminer la précision en BF à partir de εdu (s) = − G1+HBO(s)
du(s)
Outil: appliquer le théorème de la valeur finale ε0 = limt→∞
ε(t) = lims→0 sεdu(s)
Hypothèse : le système en boucle fermée est asymptotiquement stable.
O. Sename [GIPSA-lab] 24/26
Définition de la perturbation en entrée
Du(s) =Du
sqq ≥ 1 Du = Cste
Calcul de l’erreur en régime permanent
ε0 = lims→0
[s.
G(s)
1 +HBO(s).Du
sq
]= lim
s→0
[G
1 +HBO.Du
sq−1
]↗
� Notons:
G(s) =Kg
sngBg(s)
Ag(s)K(s) =
Kk
snk
Bk(s)
Ak(s)
Alors on a finalement:
ε0 = lims→0
− Kgsng
Bg(s)
Ag(s)
1 + Kksnk
Bk(s)Ak(s)
Kgsng
Bg(s)
Ag(s)
.Du
sq−1
⇒ ε0 =
−DuKk
lims→0
[snk−(q−1)
]
L’erreur statique est nulle si nk > q − 1, infinie si nk < q − 1, et constante si nk = q − 1

Précision Sans consigne
Exemple de rejet de perturbation
0 2 4 6 8 10 12 14 16 18 200
0.05
0.1
0.15
0.2
0 2 4 6 8 10 12 14 16 18 200
0.05
0.1
0.15
0.2
0.25
0 2 4 6 8 10 12 14 16 18 200
0.05
0.1
0.15
0.2
O. Sename [GIPSA-lab] 25/26
Rapidité
Rapidité
La rapidité d’un système asymptotiquement stable se mesure par la durée de son régimetransitoire.• Système du 1er ordre : t5% = 3τ
• Système du 1er ordre en boucle fermée à retour unitaire : tBF5%
=tBO5%
1+KB0 , KBO > 0
• Pour les systèmes complexes, régler la rapidité revient à régler les pôles dominants.Les réponses sont d’autant plus lentes que la partie réelle des pôles, en valuer absolue, estfaible.
• augmenter la rapidité d’un système revient à élargir la bande passante.
O. Sename [GIPSA-lab] 26/26
Recommended