DESENVOLVIMENTO DE UM KIT DIDÁTICO PARA DEMONSTRAÇÃO DA ATUAÇÃO DE UM CONTROLADOR PID DIGITAL EM UMA PLANTA
REAL
Jefferson Luis Griebeler, Thaísa A. Kienen, Wagner Rosa sob orientação Prof. Dr. Roger Gules
Universidade Tecnológica Federal do Paraná – Campus Curitiba
Departamento de Eletrotécnica
Av. Sete de Setembro, 3165
CEP 80230-901 Curitiba – PR - Brasil
Resumo – Este trabalho tem como objetivo a pesquisa e implementação de uma planta de controle digital com finalidade didática. O trabalho apresenta um referencial teórico dos conteúdos de controle e de didática embasando o desenvolvimento do projeto. São apresentadas diversas plantas possíveis de implementação com finalidades didáticas assim como a análise destes sistemas. Após a definição da planta a ser desenvolvida, são apresentados todos os itens referentes ao seu projeto e implementação, tais como: planta escolhida e justifi-cativa, modelagem matemática, projeto e ensaios dos circuitos eletrônicos, software de controle, simulações e resultados encontrados. A conclusão do trabalho apresenta uma síntese dos objetivos alcançados, recomendações para os trabalhos futuros e uma estimativa de custos. O manual de instruções e o código da programação estão disponíveis nos apêndices.
PALAVRAS - CHAVE
Sistemas de controle, didática e controle de velocidade de
motor CC.
I. INTRODUÇÃO
Devido ao grande desenvolvimento tecnológico das
últimas décadas, à crescente automatização das indústrias
e com o emprego cada vez maior de máquinas nos
processos fabris, os engenheiros das diversas
modalidades de engenharia com conhecimento em
sistemas de controle tornaram-se profissionais
amplamente solicitados pelo mercado de trabalho.
Para a formação destes profissionais com uma base sólida
de conhecimentos e com experiência prática, as
instituições de ensino necessitam de determinadas
ferramentas que, muitas vezes, são inviáveis pelo seu alto
custo. Portanto, a pesquisa de alternativas viáveis para a
melhor compreensão do assunto pode ser a solução para
contribuir para o aprendizado dos alunos e futuros
profissionais, facilitando sua inserção no mercado de
trabalho e atingindo as expectativas da indústria.
Utilizando sistemas mecânicos simples, micro-
controladores e sensores encontrados com facilidade no
mercado, é possível implementar sistemas controlados
que permitem uma visualização simplificada do seu
comportamento e a influência de determinados
parâmetros e perturbações sobre a resposta fornecida pelo
sistema, ajudando assim na formação acadêmica.
II. DEFINIÇÃO DA PLANTA DE CONTROLE
Sete plantas diferentes foram pesquisadas e analisadas
segundo os critérios de estabilidade, complexidade,
possibilidade de comprovação da atuação dos
controladores, modelagem matemática, velocidade de
resposta, sistemas de acionamento e sensores:
• Sistema amortecedor de mola;
• Sistema térmico;
• Sistema elétrico: controle de velocidade motor
CC;
• Sistema de posição: bola / aro;
• Sistema equilíbrio de um pêndulo invertido;
• Sistema barra / esfera;
• Sistema levitação magnética de uma esfera.
Dentre as plantas analisadas optou-se por implementar o
sistema elétrico de controle de velocidade de um motor
CC. Este sistema é fácil de ser construído e
implementado, garante a visualização direta da atuação
dos controladores através da indicação da velocidade do
sistema em um conjunto de displays além do custo
acessível dos itens para a montagem do projeto. Além
disto é a planta que melhor representa os conteúdos
estudados no curso de engenharia elétrica, foco deste
projeto. A figura 1 representa a planta de controle de
velocidade.
ConversorBuck
MotorCC
GeradorCC
Carga
Tacômetro
FiltroMicro-
controlador
PWM
FonteCC
Figura 1- Diagrama de blocos: sistema de controle de velocidade de
motor CC

III.DESENVOLVIMENTO DO PROJETO
O desenvolvimento do projeto apresenta os componentes
do kit didático, circuitos eletrônicos e modelagem
matemática.
• Grupo Motor Gerador
São utilizados dois motores CC de 100W e 12V. Os
motores são acoplados através de um acoplamento
especial de alumínio, com um dispositivo de borracha
para absorção de vibração, formando assim um grupo
motor-gerador, mostrado na figura 2. São fixados através
de dois grampos U num suporte de madeira para evitar
que os eixos fiquem desalinhados.
Figura 2 – Grupo Motor Gerador
• Fonte CC 12 V
A fonte utilizada é uma fonte de computador com
capacidade de corrente de aproximadamente 10A. Para
não haver problema de atuação de alguma proteção da
fonte durante a partida do motor, foi programada uma
partida em rampa via software para diminuir a corrente
de partida.
• Microcontrolador MSP430F169
O microcontrolador MSP430F169 é utilizado para gerar o
sinal PWM e controlar sua razão cíclica, para executar a
rotina de captação da velocidade do motor através do
tacogerador e para a comunicação com as interfaces de
entrada e saída. Foi utilizado um módulo que permite a
programação e gravação on-board do software facilitando
as etapas de projeto e ensaios e garantindo que aplicações
futuras possam ser implementadas através de alterações
no software.
• Cargas
Um conjunto de quatro cargas compostas por resistores
de baixa resistência e LED’s de alto brilho é conectado ao
gerador através de chaves. Podem ser inseridos e
retirados do circuito em blocos, gerando as perturbações
do sistema que permitem a visualização da atuação do
controlador PID. Cada carga é composta por dois ou três
resistores de 22Ω 10W em paralelo com mais um resistor
de 22Ω 5W e um LED de alto brilho que serve tanto
como carga quanto para a finalidade didática de indicar a
entrada ou saída da carga do sistema.
• Circuitos Eletrônicos
Os circuitos eletrônicos podem ser subdivididos em
blocos detalhados a seguir.
Regulador de tensão - O circuito do regulador de tensão
tem a função de fornecer alimentação estável em 3,3V
para o microcontrolador, uma vez que a fonte disponível
fornece tensões apenas em 5V e 12V. O esquemático do
regulador de tensão é mostrado na figura 3.
Figura 3 – Esquemático do regulador de tensão
Acionamento do motor - ConversorBuck - este
conversor é bastante utilizado no controle de motores CC.
Este tipo de conversor permite que o motor seja acionado
em apenas um sentido. Controlado por um sinal PWM de
baixa potência gerado no microcontrolador a razão cíclica
do PWM permite o controle da velocidade do motor. O
esquemático do conversor é mostrado na figura 4
Figura 4 – Esquemático do conversor meia ponte
Sensor de velocidade do motor - tacogerador - Um
tacogerador é utilizado como sensor de velocidade do
grupo motor-gerador. A tensão gerada em seus terminais
é filtrada através de um filtro Butterworth, e o divisor
resistivo garante a máxima tensão de 3,3V na entrada do
conversor A/D do microcontrolador. A figura 5 mostra a
eficácia do filtro no tratamento do sinal gerado pelo
tacogerador e recebido pelo microcontrolador.
Figura 5 – Ação do filtro sobre o sinal do tacogerador
Depois do filtro
(Canal 1 – 500mV/div)
Antes do filtro
Canal 2 – 2V/div

Interface de saída - displays de sete segmentos - Um
conjunto de displays de sete segmentos é utilizado para
mostrar alguns parâmetros do circuito, tais como
velocidade, erro ou razão cíclica do PWM. A informação
é enviada pelo microcontrolador para os displays através
de 4 bits, código BCD, e são convertidos para 7
segmentos por um decodificador CI4511. Para evitar a
perda de capacidade de processamento com a
multiplexação dos displays, foram utilizados a função
latch do decodificador e mais 4 bits de controle que são
responsáveis por “segurar” o valor em cada display
enquanto a capacidade de processamento é utilizada no
software de controle.
Interface de entrada – potenciômetros - Quatro
potenciômetros são utilizados como interface de entrada.
Um controla qual variável será mostrada no display e os
outros regulam o parâmetro “ganho” do controlador PID.
São conectados nos conversores A/D do
microcontrolador.
A figura 6 mostra o protótipo que foi construído para a
etapa de testes.
Grupo motor - gerador
Fonte de alimentação 12V
Potenciômetros
para regulagem dos
ganhos PID
Potenciômetro
de ajuste do
display
Cargas resistivas
Circuito de controle
(MSP430F149 +
regulador de tensão)
Display de sete
segmentos Filtro ativo
Butterworth
Conversor
meia ponte
Tacogerador
Acoplamento
Figura 6 – Protótipo montado para teste
Projeto da placa de circuito impresso - Após a validação
de todas as funções do kit, foi projetada a placa de
circuito impresso que garante uma maior durabilidade e
confiabilidade ao kit. Um circuito para comunicação
serial através de um CI MAX232, foi disponibilizado no
projeto final da placa com o objetivo de permitir uma
futura implementação do envio de dados do sistema físico
para o computador. A figura 7 representa as placas de
circuito impresso.
Figura 7 – Placas de circuito impresso
Além dos circuitos, foi projetada uma área em estilo
“placa padrão” para que futuramente possam ser
montados outros circuitos permitindo a implementação de
outros tipos de controle aproveitando o mesmo hardware,
tais como controle de corrente de armadura, controle de
posição, interfaces analógicas, etc.
• Modelo matemático
Com o objetivo de encontrar a função de transferência, é
aplicado ao enrolamento de armadura do motor do grupo
motor-gerador um degrau de 12V, com o auxílio de uma
bateria. Com um osciloscópio digital, registra-se a
resposta ao degrau na saída do gerador, conforme figura
8.
Figura 8 – Resposta do sistema real a um degrau
A constante de tempo do sistema é o tempo necessário
para que a resposta atinja 63% do seu valor final. A partir
dessa curva, concluímos que a constante de tempo do
sistema é de 40ms. O pólo do sistema é justamente o
inverso da constante de tempo, portanto, p = 25.
Considerando que é aplicado um degrau de valor 12V na
entrada do motor, teremos uma tensão de saída do
sistema em regime permanente, considerando o teorema
do valor final, de:
p
12.k
s
12.
)ps(
k.slim)s(G.slim)(Vs
0s0s=
+
==∞→→
12
p).(Vsk
∞=
12
25.10k =
Portanto, o valor do ganho será k = 28,83.
Obtém-se assim a função de transferência do sistema,
levando em conta apenas o pólo mais lento:
)25s(
83,20)s(G
+
=
• Validação do modelo matemático
Depois de conhecida a função de transferência
aproximada do sistema, a mesma é validada através de
simulações no software MatLab 7.0, ilustrada na figura 9.
Figura 9 – Resposta do sistema ao degrau: MatLab
De posse das duas respostas é possível verificar que
existe similaridade entre elas. A análise da curva
resultante da simulação mostra que essa também
apresenta um valor em regime permanente de 10V e um
tempo de acomodação de 250ms. A comparação entre as
duas curvas permite a validação da aproximação
realizada e a adoção desta para a realização das
simulações futuras.
• Representação em diagrama de blocos do sistema
A partir da função de transferência e dos outros ganhos
do sistema, é possível estabelecer o diagrama de blocos
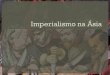
do sistema, mostrado na figura 10.
Figura 10: Diagrama de blocos
IV. RESULTADOS
Para a validação do sistema de controle foram realizados
ensaios de maneira a coletar informações que permitem
evidenciar a atuação dos controladores PID.
Para a implementação de um controlador digital onde os
ganhos são variáveis é utilizada a equação diferença na
sua forma literal. A seguir são apresentadas estas
equações para cada parâmetro do controlador PID, bem
como a saída total.
e.KpP =
)ee.(2
T.Ki.uI 1k1k −−
+=
)ee.2e.(KdD 2k1k −−+−=
DIPu ++=
A variação dos ganhos dos controladores através dos
potenciômetros permite a realização dos ensaios com
diversas combinações de ganhos.
• Ação Proporcional
A simulação é realizada com Kp=1, Ki=0 e Kd=0 e
ilustrada na figura 11.
Figura 11: Simulação da ação proporcional
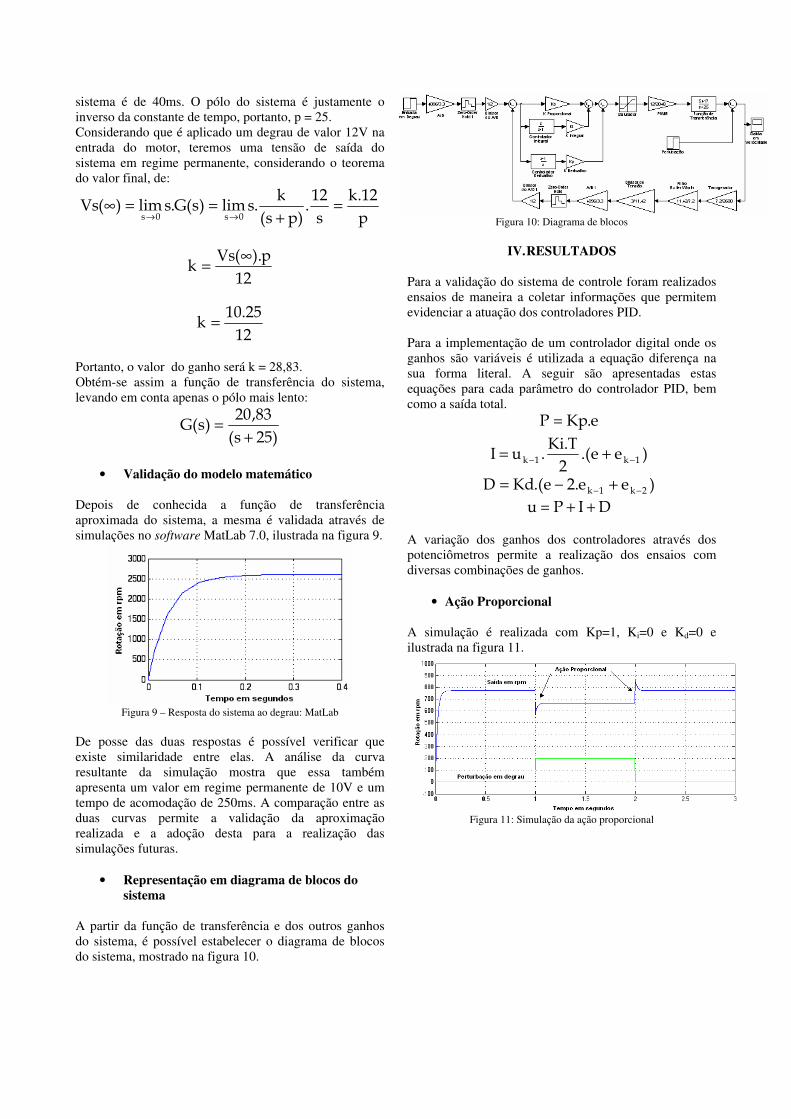
A figura 12 ilustra o resultado do ensaio.
Figura 12: Resposta do sistema com Kp=1.
Devido ao ganho baixo, o sistema conserva um erro em
regime permanente, porém a variação do PWM deixa
claro a atuação do controlador. Para ganhos proporcionais
acima de três o sistema apresenta comportamento
oscilatório, conforme figura 13.
Figura 13: Resposta do sistema Kp>3.
• Ação Integral
A simulação é realizada com Kp = 0, Ki = 2, e Kd = 0, e
ilustrada na figura 14.
Figura 14: Simulação da ação integral
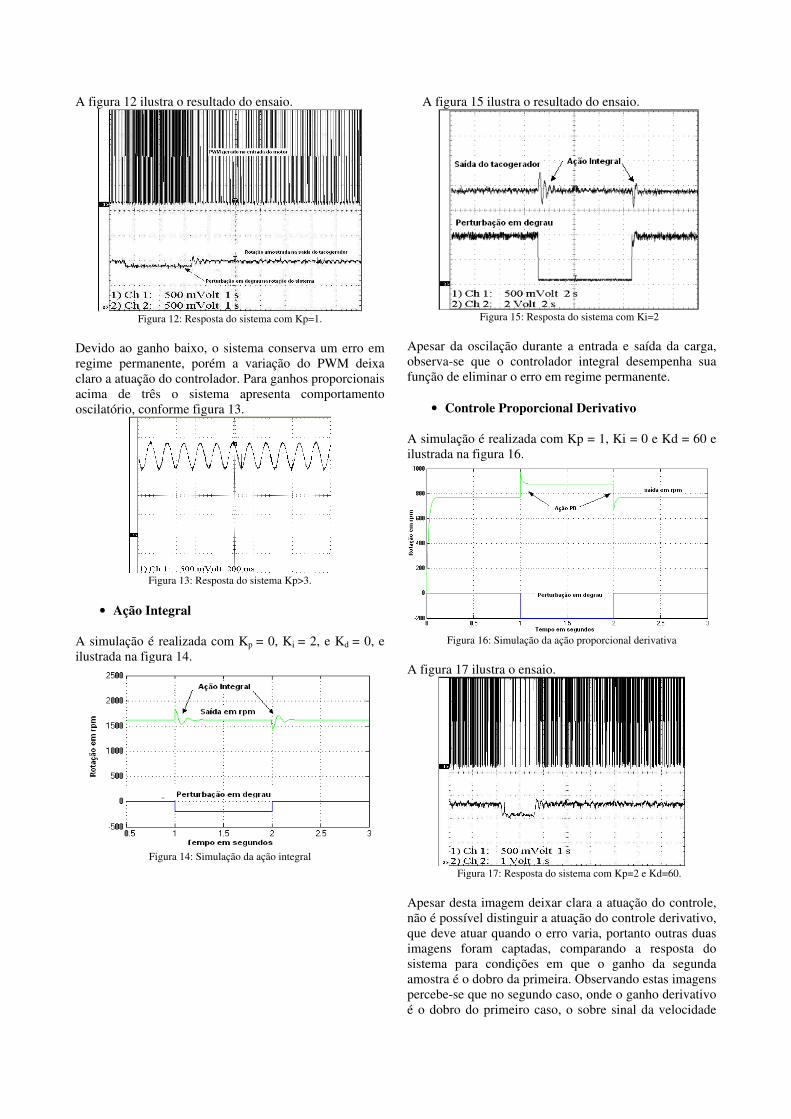
A figura 15 ilustra o resultado do ensaio.
Figura 15: Resposta do sistema com Ki=2
Apesar da oscilação durante a entrada e saída da carga,
observa-se que o controlador integral desempenha sua
função de eliminar o erro em regime permanente.
• Controle Proporcional Derivativo
A simulação é realizada com Kp = 1, Ki = 0 e Kd = 60 e
ilustrada na figura 16.
Figura 16: Simulação da ação proporcional derivativa
A figura 17 ilustra o ensaio.
Figura 17: Resposta do sistema com Kp=2 e Kd=60.
Apesar desta imagem deixar clara a atuação do controle,
não é possível distinguir a atuação do controle derivativo,
que deve atuar quando o erro varia, portanto outras duas
imagens foram captadas, comparando a resposta do
sistema para condições em que o ganho da segunda
amostra é o dobro da primeira. Observando estas imagens
percebe-se que no segundo caso, onde o ganho derivativo
é o dobro do primeiro caso, o sobre sinal da velocidade

quando ligamos a carga é muito menor, conforme figura
18.
Figura 18: Atuação do controlador derivativo.
V. CONCLUSÃO
O objetivo principal do projeto: pesquisar, desenvolver e
implementar um kit didático para as disciplinas de
controle dos cursos de engenharia, permitindo ao aluno a
visualização e compreensão prática dos conhecimentos
adquiridos, foi atingido.
Para a comprovação da atuação dos controladores foi
desenvolvida uma interface de entrada onde são ajustados
os parâmetros de entrada do controlador e é selecionada a
informação mostrada no display, onde são exibidos os
valores que comprovam a atuação do controlador como a
velocidade de rotação do sistema, razão cíclica do PWM
e valor do erro estacionário, cumprindo assim sua função
didática.
Além da interface dos displays, que cumpre o objetivo da
visualização direta da resposta, é possível captar alguns
sinais (PWM, tensão na saída do tacogerador/filtro) com
o osciloscópio o que permite enriquecer os recursos do
sistema e a aprendizagem dos alunos.
O kit contém ainda o microcontrolador que é o
responsável pela integração de todos os periféricos,
coletando e tratando os dados e enviando-os ao sistema e
a interface de saída. Como o microcontrolador disponível
é um módulo didático, este estará disponível para
programação onboard. A flexibilidade que este módulo
de programação permite aos seus usuários é que, além da
visualização dos parâmetros pré-estabelecidos, podem ser
realizadas alterações no software a qualquer momento,
permitindo futuras implementações de outros sistemas de
controle através do mesmo hardware e que sejam
realizados outros ensaios com o mesmo sistema.
AGRADECIMENTOS
Os autores agradecem o Professor Dr. Roger Gules, por
ter contribuído com seu precioso tempo e conhecimento
para o sucesso deste projeto. Agradecemos também aos
nossos familiares e amigos que compreenderam nossa
ausência durante as diversas horas de trabalho, nos
incentivando a continuar e dando forças para fazermos o
melhor possível.
REFERÊNCIAS BIBLIOGRÁFICAS
[1] OGATA, Katsuhiko; Engenharia de controle moderno. Tradução Bernardo Severo. 3º ed. Rio de
Janeiro: LTC, 1998.
[2] DORF, Richard C.; BISHOP Robert H. Sistemas de controle moderno. Tradução Bernardo Severo da
Silva Filho 8º ed. Rio de Janeiro: LTC, 1998.
Recommended