Diplomarbeit
Auslegung und Konstruktion eines Proton – Emittanz –Monitors
Kandidat Martin Borchard
Matrikel – Nummer: 155 20 81
Erstprüfer: Prof. Dr. Ing. Joachim Koeppen Hochschule für Angewandte Wissenschaften Hamburg
Zweitprüfer: Prof. Dr. Ing. Wolfgang Schulz Hochschule für Angewandte Wissenschaften Hamburg Betreuer: Dr. Gero Kube Dipl. Ing. Christan Wiebers Deutsches Elektronen – Synchrotron Hamburg
Hamburg, September 2005

Danksagung
Mein besonderer Dank gilt den Prüfern Herrn Prof. Dr. Ing. Joachim Koeppen und Herrn
Prof. Dr. Ing. Wolfgang Schulz für die Betreuung dieser Diplomarbeit.
Weiterhin gilt mein besonderer Dank den Betreuern und Angestellten beim
Forschungsinstitut DESY, die mich bei der Ausführung der Arbeit durch Ihre kooperative
Zusammenarbeit unterstützt haben. Dieser Dank gebührt in besonderer Weise Frau
Silke Vilcins – Czvitkovits, Herrn Christian Wiebers und Herrn Gero Kube, sowie den
namentlich nicht genannten Mitarbeiter der Gruppe MDI.
Für die persönliche Unterstützung während dieser Zeit möchte ich mich bei Frau Ingrid
Wahlmeyer bedanken.
Die Zusammenfassung ______________________________________________________________________
Die Zusammenfassung
Das Thema dieser Diplomarbeit ist die Auslegung und die Konstruktion eines Proton –
Emitanz – Monitors für das Forschungsinstitut DESY in Hamburg. Dieser Proton –
Emittanz – Monitor soll in dem Teilchenbeschleuniger HERA dazu verwendet werden
die Strahlemittanz des Protonenstrahls zu ermitteln. Dies ist notwendig, weil mit dem
Ergebnis die Effizienz der in den Wechselwirkungszonen sich ereignenden Experimente
gesteigert wird.
Die technische Ausarbeitung dieser Diplomarbeit orientiert sich an der VDI – Richtlinie
2221. Die in dieser Richtlinie beschriebenen Vorgänge werden in vier Phasen
umgesetzt. In der Informationsphase wird im Rahmen der Einleitung, der Beschreibung
der Aufgabe und den allgemeinen Grundlagen über die Strahlung die Aufgabenstellung
geklärt und präzisiert. In der Konzeptphase werden methodisch die benötigten
Wirkprinzipien und die Funktionen entwickelt und anschließend bewertet. Für die
ermittelten Wirkprinzipien und Funktionen werden Komponenten und
Gestaltungsmöglichkeiten erstellt, und diese werden in der Funktionsbeschreibung
erläutert. Die Ergebnisse der Konzeptphase werden in der Konstruktionsphase mittels
der erstellten Lösungsansätze umgesetzt. In der Phase der Produktdokumentation wird
anhand der Fertigungsunterlagen die technische Realisierung der in der Konzeptphase
formulierten Anforderungen beschrieben. Abschließend gibt das Fazit und der Ausblick
einen Überblick über den erzielten Erfolg und über die zukünftigen
Entwicklungsmöglichkeiten des Proton – Emittanz – Monitors.

Inhaltsverzeichnis ______________________________________________________________________
VI
I. Abbildungsverzeichnis ..............................................................- 8 - II. Tabellenverzeichnis ................................................................- 12 - III. verwendete Formeln und Symbole .........................................- 14 - IV. verwendete Abkürzungen .......................................................- 17 - 1. Die Einführung ........................................................................- 19 -
1.1. Der Teilchenbeschleuniger HERA ................................................................... - 20 - 2. Die Aufgabenstellung................................................................- 21 -
2.1. Der bestehende Proton – Emittanz – Monitor.................................................. - 22 - 2.2. Die Neukonstruktion......................................................................................... - 24 -
3. Die allgemeinen Grundlagen der Strahlung..............................- 26 -
3.1. Die verschiedenen Strahlungsarten................................................................. - 26 - 3.1.1. Die Synchrotronstrahlung.......................................................................... - 27 - 3.1.2. Die Untergrundstrahlung ........................................................................... - 34 -
3.1.2.1. Die Schäden durch die Untergrundstrahlung...................................... - 34 - 3.1.2.2. Der Schutz vor der Untergrundstrahlung ............................................ - 35 -
4. Die Konzeptphase ....................................................................- 38 -
4.1. Die Anforderungsliste....................................................................................... - 40 - 4.2. Das Erstellen des Konzeptes........................................................................... - 47 - 4.3. Das methodische Konstruieren........................................................................ - 48 -
4.3.1. Die Funktionsstruktur ................................................................................ - 48 - 4.3.1.1. Die Black Box ..................................................................................... - 49 - 4.3.1.2. Die innere Funktionsstruktur............................................................... - 50 - 4.3.1.3. Die Teilfunktionen ............................................................................... - 52 -
4.3.2. Die Wirkprinzipien und die Lösungsansätze ............................................. - 54 - 4.3.2.1. Die Auflistung der Wirkprinzipien und der Lösungsansätze ............... - 55 - 4.3.2.2. Die Analyse und die Bewertung der Lösungsansätze ........................ - 60 -
4.3.3. Der Morphologische Kasten ...................................................................... - 67 - 4.3.4. Die Festlegung der Variante .................................................................. - 69 -
Inhaltsverzeichnis ______________________________________________________________________
VII
5. Die Funktionsbeschreibung ......................................................- 70 -
5.1. Die Funktionsbeschreibung der verwendeten Komponenten .......................... - 70 - 5.1.1. Die Lineartische......................................................................................... - 70 -
5.1.1.1. Die Schrittmotoren .............................................................................. - 72 - 5.1.2. Die Filterräder............................................................................................ - 74 -
5.1.2.1. Die Polarisationsfilter .......................................................................... - 75 - 5.1.2.2. Die Neutraldichtfilter ........................................................................... - 76 -
5.1.3. Die CAN Bus – Steuerung......................................................................... - 76 - 5.1.4. Die Endstufen zur Schrittmotorsteuerung ................................................. - 77 - 5.1.5. Der Photomultiplier.................................................................................... - 78 - 5.1.6. Die Kamera ............................................................................................... - 80 - 5.1.7. Die Peltier – Kühlelemente........................................................................ - 81 - 5.1.8. Die Spannungsversorgung und der Signalfluss ........................................ - 83 -
5.2. Die Zusammenfassung der Gesamtfunktion.................................................... - 86 - 6. Die Konstruktionsphase............................................................- 88 -
6.1. Die Konstruktion mittels eines 3D – CAD Systems.......................................... - 89 - 6.2. Die Dimensionierung der Bauteile ................................................................... - 92 - 6.3. Die Berechnung der Komponenten und der Bauteile ...................................... - 93 -
6.3.1. Die Berechnung der Komponenten ........................................................... - 93 - 6.3.1.1. Die Berechnung der Geschwindigkeit und der Beschleunigung......... - 94 - 6.3.1.2. Die Überprüfung der Belastung der Lineartische................................ - 95 - 6.3.1.3. Die Berechnung der maximalen Winkelauslenkung der Lineartische. - 96 -
6.3.2. Die Berechnungen der Bauteile ................................................................ - 97 - 6.3.2.1. Die Berechnung der Verbindungselemente........................................ - 97 - 6.3.2.2. Die Berechnung der Gesamtabsenkung der Detektoren.................. - 100 - 6.3.2.3. Die Berechnung der Abschirmung.................................................... - 101 - 6.3.2.4. Die Berechnung des Tragegestelles................................................. - 102 -
6.3.3. Die dynamischen Berechnungen ............................................................ - 102 - 6.3.4. Die Berechnung des Temperatureinflusses ............................................ - 104 -
7. Die Produktdokumentation .....................................................- 106 -
7.1. Die Fertigungsunterlagen............................................................................... - 106 - 7.1.1. Die Abbildung der Bauteile...................................................................... - 106 - 7.1.2. Die Abbildung der Baugruppe ................................................................. - 110 - 7.1.3. Die Stückliste........................................................................................... - 111 - 7.1.4. Die Abbildung des Gesamtproduktes...................................................... - 112 -
7.2. Die Montageanleitung .................................................................................... - 115 - 7.3. Die Betriebsanweisung .................................................................................. - 117 -
8. Fazit und Ausblick...................................................................- 119 - V. Quellenverzeichnis................................................................- 121 - VI. Anhang..................................................................................- 123 -
Kapitel I: Das Abbildungsverzeichnis ______________________________________________________________________
VIII
I. Abbildungsverzeichnis Abb. 1-1: Die Beschleuniger beim DESY…………………………………………. - 20 -
Quelle: DESY Homepage
Abb. 2-1: Die schematische Darstellung zeigt den existierenden
Proton – Emittanz – Monitor…………………………………………….. - 23 -
Abb. 2-2: Das ausgewertete Signal des existierenden
Proton – Emittanz – Monitors…………………………………………… - 23 -
Abb. 3-1: Das abstrahlende Strahlungsfeld bei tangentialer Beschleunigung
nicht relativistischer (a) und relativistischer (b) Teilchen am Beispiel
des Elektron………………………………………………………………. - 27 -
Quelle: [5] Seite 42
Abb. 3-2: Das Verhalten des Strahlungsfeldes bei unterschiedlichen
Geschwindigkeiten……………………………………………………….. - 28 -
Abb. 3-3: Das Energiespektrum der Synchrotronstrahlung und die
verschiedenen Anwendungsgebieten………………………………….. - 29 -
Quelle: DESY99 – TD –S001- H.pdf
Abb. 3-4: Die Darstellung möglicher Schäden durch die vorkommenden
Untergrundstrahlungen im Beschleunigertunnel……………………… - 35 -
Quelle: Diplomarbeit Christian Wiebers , Kiel Dezember 2004
Abb. 3-5: Das Prinzip einer dreistufigen Neutronenstrahlen – Abschirmung….. - 37 -
Quelle: http://www.energiewelten.de/elexikon/lexikon/seiten/htm/
020630_Abschirmung_von_Strahlung.htm
Kapitel I: Abbildungsverzeichnis ______________________________________________________________________
IX
Abb. 3-6: Die Beispiele verschiedener Strahlungen und deren Reichweite
durch verschiedene Abschirmungen…………………………………… - 37 -
Quelle: http://www.energiewelten.de/elexikon/lexikon/seiten/htm/
020630_Abschirmung_von_Strahlung.htm
Abb. 4-1: Das Vorgehen bei der Konstruktion neuer technischer Produkte in
Anlehnung an die VDI – Richtlinie 2221……………………………….. - 39 -
Quelle: [9] Seite 28
Abb. 4-2: Die Konzeptskizze der Nachweisenden Funktionsgruppe des
Proton – Emittanz – Monitors…………………………………………… - 47 -
Abb. 4-3: Die Darstellung der Black Box des Proton – Emittanz – Monitors… - 49 -
Abb. 4-4: Die Abbildung zeigt die innere Struktur des
Proton – Emittanz – Monitors…………………………………………… - 51 -
Abb. 4-5: In der Abbildung sind die Teilfunktionen und die Unterfunktionen
aufgelistet…………………………………………………………………. - 53 -
Abb. 5-1: Die Darstellung eines der eingesetzten Lineartische von OWIS der
LTM 80 Serie…………………………………………………………….. - 72 -
Quelle: OWIS - Katalog
Abb. 5-2: Die Darstellung eines Schrittmotors im seriellen Bipolarbetrieb…….. - 73 -
Quelle: Homepage Nanotec
Abb. 5-3: Die Abbildung eines der eingesetzten Filterräder der Firma OWIS - 74 -
Quelle: OWIS - Katalog
Abb. 5-4: Die Abbildung der Wirkweise von den Polarisationsfiltern…………… - 75 -
Quelle: [14] Seite 227
Abb. 5-5: Die Abbildung einer eingesetzten Endstufe des Hersteller esd……... - 77 -
Quelle: Handbuch esd
Kapitel I: Abbildungsverzeichnis ______________________________________________________________________
X
Abb. 5-6: Die Abbildung zeigt das Schaltbild der Schrittmotoren –
Endstufe mit Anschlüssen des Motors sowie der Endschalter,
der Energieversorgung und des CAN – Bus……………………… - 78 -
Quelle: Handbuch esd
Abb. 5-7: Die Abbildung des Photomultiplieres R2496 von Hamamatsu….. - 78 -
Quelle: Hamamatsu Katalog
Abb. 5-8: Die Prinzipskizze eines Photomultipliers………………………….. - 79 -
Quelle: Wikipedia, Photomultiplier
Abb. 5-9: Das Abbild der eingesetzten Kamera JAI – 300 M………………. - 80 -
Quelle: Datenblatt der Kamera
Abb. 5-10: Die Abbildung zeigt den Seebeck – Effekt………………………… - 81 -
Quelle: Grundlagen der Peltier - Kühlelemente
Abb. 5-11: Die Abbildung zeigt den Peltier – Effekt…………………………… - 82 -
Quelle: Grundlagen der Peltier - Kühlelemente
Abb. 5-12: Die Schematische Darstellung des Signalflusses………………… - 84 -
Abb. 5-13: Die Schematische Darstellung des Energieflusses……………… - 85 -
Abb. 6-1: Die Abbildung der Achsen der Lineartische in dem
Bezugssystem der Lineartischen………………………………….. - 96 -
Quelle: OWIS - Katalog
Abb. 6-2: Die Positionierungseinheit mit den Bezeichnungen und den
Maßen………………………………………………………………… - 98 -
Abb. 7-1: Die isometrische Ansicht des Bodens……………………………... - 107 -
Abb. 7-2: Die isometrische Ansicht der Wand……………………………….. - 108 -
Abb. 7-3: Die isometrische Ansicht des Stirn Einlass……………………….. - 109 -
Kapitel I: Abbildungsverzeichnis ______________________________________________________________________
XI
Abb. 7-4: Die isometrische Ansicht der Stirn Rückseite…………………….. - 109 -
Abb. 7-5: Die isometrische Ansicht des Deckels Form 1…………………… - 109 -
Abb. 7-6: Die isometrische Ansicht des Deckels Form 2…………………… - 109 -
Abb. 7-7: Die Abbildung der Baugruppe Neutronenabschirmung…………. - 110 -
Abb. 7-8: Die Stückliste der Baugruppe Positionierung…………………….. - 111 -
Abb. 7-9: Das CAD – Modell des Gesamtproduktes, Abbildung von schräg
vorne oben…………………………………………………………… - 112 -
Abb. 7-10: Das CAD – Modell des Gesamtproduktes, Abbildung von
seitlich schräg………………………………………………………… - 113 -
Abb. 7-11: Das CAD – Modell des Gesamtproduktes, Abbildung von schräg
oben……………………………………………………………………. - 113 -
Abb. 7-12: Die Fotografie des Gesamtproduktes, Abbildung von schräg
oben und vorne………………………………………………………. - 114 -
Abb. 7-13: Die Fotografie des Gesamtproduktes, Abbildung von schräg
vorne…………………………………………………………………… - 114 -
Abb. 7-14: Die Betriebsanweisung für den Proton – Emittanz – Monitor…… - 118 -
Kapitel II: Tabellenverzeichnis ______________________________________________________________________
XII
II. Tabellenverzeichnis Tab. 4-1: Die Anforderungsliste………………………………………………… - 46 -
Tab. 4-2: Die Unterfunktion 1 und 4, die Positionierung der Detektoren und
der Filter………………………………………………………………… - 55 -
Tab. 4-3: Die Unterfunktion 2 und 5, die Positionierungssteuerung der
Detektoren und der Filter……………………………………………… - 55 -
Tab. 4-4: Die Unterfunktion 3, der Detektorwechsel…………………………… - 56 -
Tab. 4-5: Die Teilfunktion 5, die Positionierung der Filter in y – Richtung…... - 56 -
Tab. 4-6: Die Unterfunktion 7.1, die Neutronenabschirmung…………………. - 57 -
Tab. 4-7: Die Unterfunktion 7.2, die Gammaabschirmung……………………. - 57 -
Tab. 4-8: Die Teilfunktion 8, die Schwingungsdämpfung……………………… - 58 -
Tab. 4-9: Die Teilfunktion 9, die Wärmeabfuhr…………………………………. - 58 -
Tab. 4-10: Die Teilfunktion 10, die Tragerkonstruktion…………………………. - 59 -
Tab. 4-11: Die Übersicht über die Bewertungskriterien und ihre Wertigkeit….. - 63 -
Tab. 4-12: Die Bewertung der Lösungsansätze der Teilfunktion 1, die
Positionierung der Detektoren………………………………………… - 64 -
Tab. 4-13: Die Bewertung der Lösungsansätze der Teilfunktion 4, der
Filterwechsel…………………………………………………………… - 65 -
Tab. 4-14: Die Bewertung der Lösungsansätze der Unterfunktion 7.1, die
Neutronenabschirmung……………………………………………….. - 66 -
Tab. 4-15: Der Morphologischer Kasten der Teilfunktionen und der
Unterfunktionen mit eingezeichneten Lösungsvarianten…………... - 68 -
Kapitel II: Tabellenverzeichnis ______________________________________________________________________
XIII
Tab. 5-1: Die eingesetzten Lineartische……………………………………… - 71 -
Tab. 5-2: Die Aufschlüsselung der Bestellnummer…………………………… - 71 -
Tab. 6-1: Die Belastung der Lineartische……………………………………… - 95 -
Tab. 6-2: Die Absenkungen der Detektoren durch die Winkelverstellung….. - 97 -
Tab. 6-3: Die berechnete Verformungen der Verbindungselemente……….. - 99 -
Tab. 6-4: Die berechnete Sicherheit des Verbindungselementes gegen
Fließen………………………………………………………………….. - 100 -
Tab. 6-5: Die berechnete Gesamtabsenkung der Detektoren………………. - 100 -
Tab. 6-6: Die Sicherheit der Abschirmung…………………………………….. - 101 -
Tab. 6-7: Die Sicherheit des Tragegestelles………………………………….. - 102 -
Tab. 6-8: Die dynamische Beanspruchung bei empfohlener
Beschleunigung - 103 -
Tab. 6-9: Die dynamischen Beanspruchung bei maximaler Beschleunigung - 104 -
Tab. 6-10: Die Überprüfung der Längenänderung……………………………... - 105 -
Tab. 7-1: Die Montageanleitung für die Nachweisende Funktionsgruppe…. - 116 -
Kapitel III: verwendeten Gleichungen und Symbole ______________________________________________________________________
XIV
III. verwendete Gleichungen und Symbole
Gl. 3-1 2
4
4200
2
*)*(
1***6*
RE
cmcePs επ
= .......................................................... - 30 -
Gl. 3-2 13
4
2
2
,
, 10*13.1**
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
cmcm
SS
e
p
ps
es …………………………………………. - 30 -
Gl. 3-3 c
cc
ωπλ **2
= ……………………………………………………………… - 31 -
Gl. 3-4 R
cc *2
**3 3γω = ……………………………………………………………. - 31 -
Gl. 3-5 20 *cmE
=γ ………………………………………………………………... - 32 -
Gl. 3-6 γ1
≈Θ ………………………………………………………………… - 33 -
Gl. 6-1 tva = ……………………………………………………………………….. - 94 -
Gl. 6-2 2* 2tas = …………………………………………………………………... - 94 -
Gl. 6-3 gungskraftBeschleunigtemasseBeschleunia =max ……………………………………………. - 94 -
Gl. 6-4 max
max
av
t = …………………………………………………………………….. - 94 -
Gl. 6-5 BelastunggrenzeBelastungsSicherheitvorhanden = …………………………………… - 95 -
Gl. 6-6 amF *= ……………………………………………………………………. - 95 -
Gl. 6-7 HebelarmAbsenkung *)tan(α= …………………………………………. - 97 -
Kapitel III: verwendeten Gleichungen und Symbole ______________________________________________________________________
XV
Gl. 6-8 IE
lFym **3* 3
= …………………………………………………………… - 99 -
Gl. 6-9 dll ε*0=Δ ………………………………………………………………. - 99 -
Gl. 6-10 AE
Fdd *=ε ………………………………………………………………. - 99 -
Gl. 6-11 vorhanden
ungsgrenzeBeanspruchvorhandenSicherheit
σσ
= …………………………………... - 100 -
Gl. 6-12 smomentWiderständ
tBiegemomenvorhanden =σ ………………………………………. - 100 -
Gl. 6-13 vorhanden
ungsgrenzeBeanspruchvorhandenSicherheit
σσ
= …………………………………... - 101 -
Gl. 6-14 smomentWiderständ
tBiegemomenvorhanden =σ ………………………………………. - 101 -
Gl. 6-15 k
krit lIEF
*4**2π
= ……………………………………………………….. - 102 -
Gl. 6-16 Masse
kritvorhanden F
FSicherheit = ……………………………………………... - 102 -
Gl. 6-17 Tll Δ=Δ **0 α …………………………………………………………. - 105 -
Kapitel III: verwendeten Gleichungen und Symbole ______________________________________________________________________
XVI
Symbol Erklärung Einheit a Beschleunigung mm / s² A Fläche mm² c Lichtgeschwindigkeit im Vakuum m / s² E E-Modul N / mm² e Elementarladung C E Strahlenergie des Beschleunigers eV F Kraft N I Flachenträgheitsmoment mm4 l Länge mm l0 Ausgangslänge mm lk Knicklänge mm m Masse kg m0 Ruhemasse einer Elementarladung kg me Ruhemasse eines Elektron kg mp Ruhemasse eines Proton kg Ps Strahlungsleistung W R Krümmungsradius des Beschleunigers m s Weg S Sicherheit 1 / 1 Ss,e Strahlung eines Elektron --- Ss,p Strahlung eines Proton --- t Zeit s v Geschwindigkeit mm / s W Widerstandsmoment mm³ ym Absenkung mm α Winkel rad α Längen - Ausdehnungskoeffizient 1 / K γ Lorentzfaktor 1 / 1 Δl Längenänderung mm ΔT Temperaturdifferenz K ε0 Dielektrizitätskonstante Vs / Am εd Stauchung 1 / 1 Θ Abstrahlungswinkel rad λc Kritische Wellenlänge M σ Spannung N / mm² ωc Kritische Frequenz 1 / s

Kapitel IV: Die verwendeten Abkürzungen ___________________________________________________________________
XVII
IV. verwendete Abkürzungen
Abkürzung Erklärung
BKR Beschleuniger Kontrollraum
BNC Bayonet Neill Concelman
CAD Computer Aided Design
CAM Computer Aided Manufacturing
CAN BUS Controller Area Network Binary Unit System
CIM Computer Integrated Manufacturing
CSMA Carrier Sense Multiple Access
DESY Deutsches Elektronen – Synchrotron
EDI Electronic Data Interchange
HERA Hadron – Elektron – Ring – Anlage
HF Hochfrequenz (zwischen 10 kHz und 1 MHz)
MDI Maschine Diagnose und Instrumentierung
OEM Original Equipment Manufacturer
Tf Teilfunktion
Uf Unterfunktion

XVIII

Kapitel 1: Die Einführung ______________________________________________________________________
- 19 -
1. Die Einführung
Für das Forschungsinstitut DESY (Deutsche Elektronen Synchrotron) soll im Rahmen
dieser Diplomarbeit ein Proton – Emittanz – Monitor für den Hochenergie –
Beschleuniger HERA (Hadron – Elektron – Ring – Anlage) ausgelegt und konstruiert
werden.
Das Forschungsinstitut DESY ist in der Helmholtz-Gemeinschaft1 integriert und eines
der weltweit führenden Zentren für die Forschung an Teilchenbeschleunigern. Es wurde
am 18. Dezember 1959 in Hamburg gegründet. Das Institut ist ein mit öffentlichen
Mitteln finanziertes nationales Forschungszentrum mit zwei Standorten, in Hamburg und
in Zeuthen (Brandenburg). Der Etat für die Forschungseinrichtung wird vom Bund und
von dem jeweiligen Bundesland finanziert [1]. Am DESY werden naturwissenschaftliche
Grundlagenforschungen mit den folgenden Schwerpunkten betrieben:
• Untersuchung fundamentaler Eigenschaften der Materie in der Teilchenphysik
mit dem Teilchenbeschleuniger HERA
• Nutzung der Synchrotronstrahlung in der Oberflächenphysik,
Materialwissenschaften, Chemie, Molekularbiologie, Biophysik und Medizin im
Hamburger Synchrotronstrahlungslabor sowie
• Entwicklung, Bau und Betrieb der entsprechenden Beschleuniger – Anlagen [2]
Die Gruppe MDI ist eine Abteilung des DESY-Beschleunigerbereiches. MDI steht für
Maschine Diagnose Instrumentierung. Zu den Aufgaben der Gruppe gehören die
Entwicklung und der Betrieb sowie die Instandhaltung und die Wartung spezieller
Messgeräte für die Diagnose der Elektronen- und Protonen-Strahlen [3]. Von dieser
Gruppe wird die Auslegung und Konstruktion des Proton – Emittanz – Monitors betreut.
1 Die Helmholtz Gemeinschaft ist Deutschlands größte Wissenschaftsorganisation, siehe auch im Internet unter http://www.helmholtz.de/
Kapitel 1: Die Einführung ______________________________________________________________________
- 20 -
1.1. Der Teilchenbeschleuniger HERA
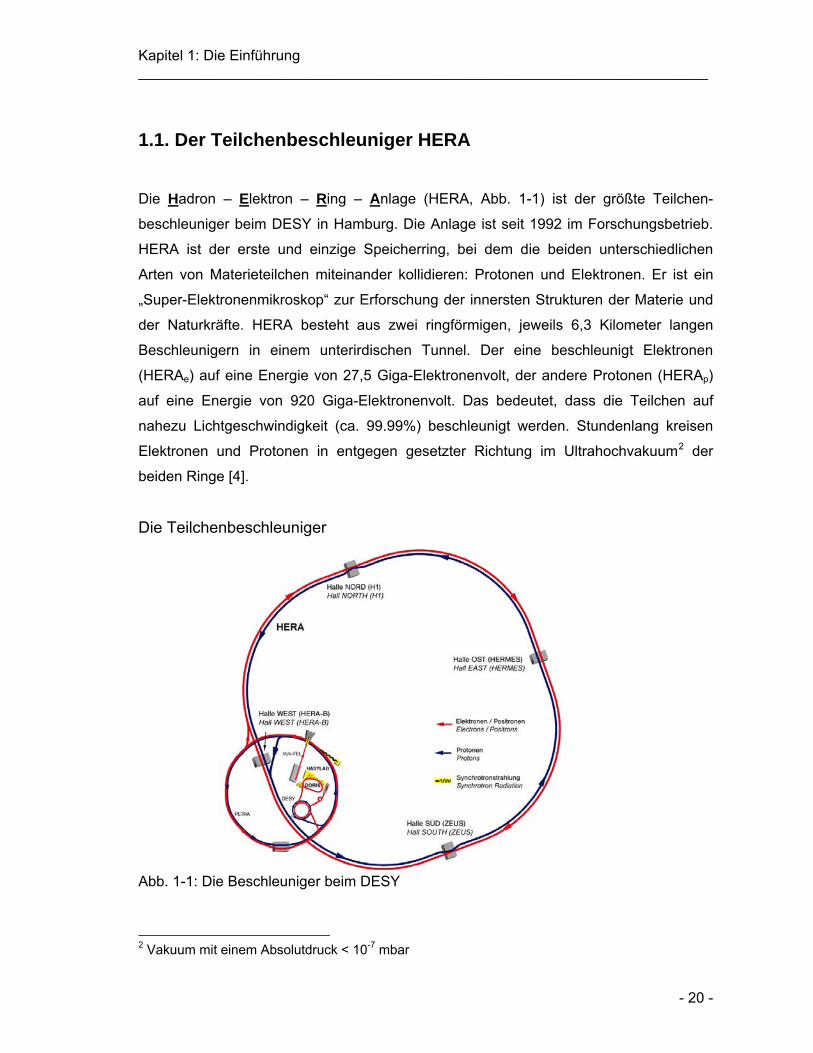
Die Hadron – Elektron – Ring – Anlage (HERA, Abb. 1-1) ist der größte Teilchen-
beschleuniger beim DESY in Hamburg. Die Anlage ist seit 1992 im Forschungsbetrieb.
HERA ist der erste und einzige Speicherring, bei dem die beiden unterschiedlichen
Arten von Materieteilchen miteinander kollidieren: Protonen und Elektronen. Er ist ein
„Super-Elektronenmikroskop“ zur Erforschung der innersten Strukturen der Materie und
der Naturkräfte. HERA besteht aus zwei ringförmigen, jeweils 6,3 Kilometer langen
Beschleunigern in einem unterirdischen Tunnel. Der eine beschleunigt Elektronen
(HERAe) auf eine Energie von 27,5 Giga-Elektronenvolt, der andere Protonen (HERAp)
auf eine Energie von 920 Giga-Elektronenvolt. Das bedeutet, dass die Teilchen auf
nahezu Lichtgeschwindigkeit (ca. 99.99%) beschleunigt werden. Stundenlang kreisen
Elektronen und Protonen in entgegen gesetzter Richtung im Ultrahochvakuum2 der
beiden Ringe [4].
Die Teilchenbeschleuniger
Abb. 1-1: Die Beschleuniger beim DESY
2 Vakuum mit einem Absolutdruck < 10-7 mbar

Kapitel 2: Die Aufgabenstellung ______________________________________________________________________
- 21 -
2. Die Aufgabenstellung
In dem Teilchenbeschleuniger HERA werden in zwei Wechselwirkungszonen
Experimente zur Elementarteilchenphysik durchgeführt. Bei diesen Experimenten
werden in den zwei Wechselwirkungszonen beide Teilchenstrahlen zur Kollision
gebracht. Um in diesen Wechselwirkungszonen effizient forschen zu können, ist es
hinsichtlich der Forschungsergebnisse besonders wichtig, das transversale Profil des
Teilchenstrahls dort zu kennen. Die transversalen Ausdehnungen der Teilchenstrahlen
sollten beim Eintritt in die Wechselwirkungszonen möglichst identisch sein. Weil eine
Messung dieser Größen in der Wechselwirkungszone sehr aufwendig ist und Einfluss
auf das transversale Profil der Teilchenstrahlen nehmen könnte, bedient man sich der
Tatsache, dass die Emittanz in dem Teilchenbeschleuniger an jedem Ort konstant ist.
Durch das an einem Punkt bekannte transversale Profil des Teilchenstrahls und die
ebenfalls an diesem Ort bekannten Magnetfelder der Strahlführungsmagnete, kann an
dieser Stelle des Teilchenbeschleunigers die Emittanz berechnet werden. Wegen der
Konstanz der Emittanz kann mittels der bekannten Magnetfelder der anderen
Strahlführungsmagnete das transversale Profil des Teilchenstrahls an jedem beliebigen
Punkt in dem Teilchenbeschleuniger berechnet werden. Dieses Vorgehen ist sehr
effizient, denn mit der Messung des Profils an einem Punkt kann die Profilverteilung im
gesamten Teilchenbeschleuniger berechnet werden und ist somit bekannt.
Zur Kontrolle der transversalen Strahldimension von den Teilchenstrahlen werden
Diagnosegeräte unterschiedlicher Verfahren eingesetzt. Der neu zu konstruierende
Proton – Emittanz – Monitor wird in dem Teilchenbeschleuniger HERA dazu verwendet,
eine transversale Profilmessung des Protonenstrahls durchzuführen. Bei diesem Monitor
wird die Synchrotronstrahlung als Diagnosemedium genutzt. Durch das Ergebnis der
Messung kann das transversale Profil in den Wechselwirkungszonen optimiert werden.
Dadurch wird ein effizienteres Forschen an den Experimenten ermöglicht.
Kapitel 2: Die Aufgabenstellung ______________________________________________________________________
- 22 -
2.1. Der bestehende Proton – Emittanz – Monitor
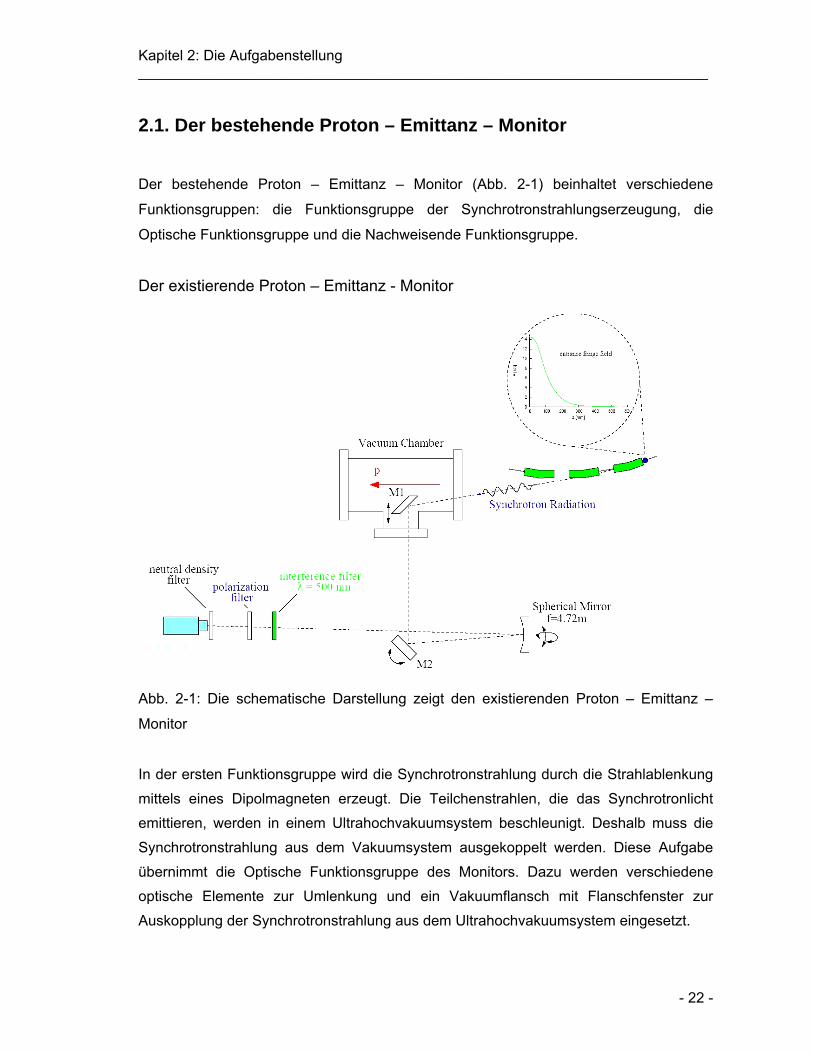
Der bestehende Proton – Emittanz – Monitor (Abb. 2-1) beinhaltet verschiedene
Funktionsgruppen: die Funktionsgruppe der Synchrotronstrahlungserzeugung, die
Optische Funktionsgruppe und die Nachweisende Funktionsgruppe.
Der existierende Proton – Emittanz - Monitor
Abb. 2-1: Die schematische Darstellung zeigt den existierenden Proton – Emittanz –
Monitor
In der ersten Funktionsgruppe wird die Synchrotronstrahlung durch die Strahlablenkung
mittels eines Dipolmagneten erzeugt. Die Teilchenstrahlen, die das Synchrotronlicht
emittieren, werden in einem Ultrahochvakuumsystem beschleunigt. Deshalb muss die
Synchrotronstrahlung aus dem Vakuumsystem ausgekoppelt werden. Diese Aufgabe
übernimmt die Optische Funktionsgruppe des Monitors. Dazu werden verschiedene
optische Elemente zur Umlenkung und ein Vakuumflansch mit Flanschfenster zur
Auskopplung der Synchrotronstrahlung aus dem Ultrahochvakuumsystem eingesetzt.
Kapitel 2: Die Aufgabenstellung ______________________________________________________________________
- 23 -
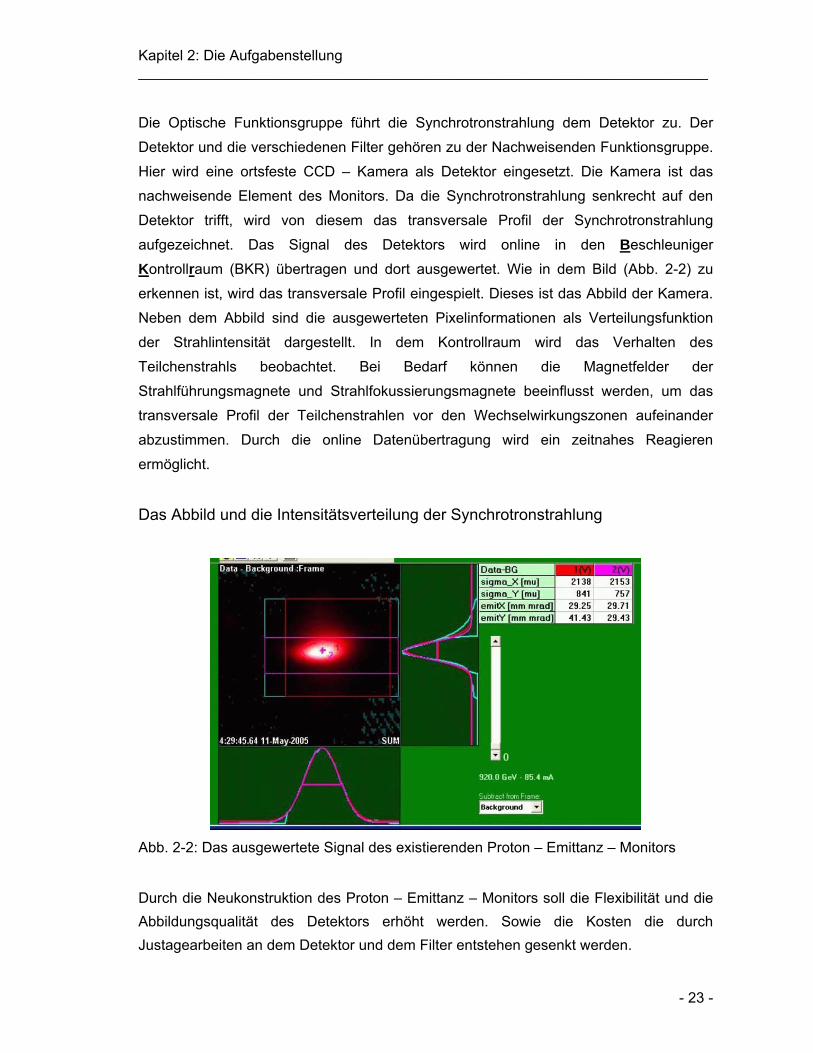
Die Optische Funktionsgruppe führt die Synchrotronstrahlung dem Detektor zu. Der
Detektor und die verschiedenen Filter gehören zu der Nachweisenden Funktionsgruppe.
Hier wird eine ortsfeste CCD – Kamera als Detektor eingesetzt. Die Kamera ist das
nachweisende Element des Monitors. Da die Synchrotronstrahlung senkrecht auf den
Detektor trifft, wird von diesem das transversale Profil der Synchrotronstrahlung
aufgezeichnet. Das Signal des Detektors wird online in den Beschleuniger
Kontrollraum (BKR) übertragen und dort ausgewertet. Wie in dem Bild (Abb. 2-2) zu
erkennen ist, wird das transversale Profil eingespielt. Dieses ist das Abbild der Kamera.
Neben dem Abbild sind die ausgewerteten Pixelinformationen als Verteilungsfunktion
der Strahlintensität dargestellt. In dem Kontrollraum wird das Verhalten des
Teilchenstrahls beobachtet. Bei Bedarf können die Magnetfelder der
Strahlführungsmagnete und Strahlfokussierungsmagnete beeinflusst werden, um das
transversale Profil der Teilchenstrahlen vor den Wechselwirkungszonen aufeinander
abzustimmen. Durch die online Datenübertragung wird ein zeitnahes Reagieren
ermöglicht.
Das Abbild und die Intensitätsverteilung der Synchrotronstrahlung
Abb. 2-2: Das ausgewertete Signal des existierenden Proton – Emittanz – Monitors
Durch die Neukonstruktion des Proton – Emittanz – Monitors soll die Flexibilität und die Abbildungsqualität des Detektors erhöht werden. Sowie die Kosten die durch Justagearbeiten an dem Detektor und dem Filter entstehen gesenkt werden.
Kapitel 2: Die Aufgabenstellung ______________________________________________________________________
- 24 -
2.2. Die Neukonstruktion
Die vorzunehmende Neukonstruktion des Proton – Emittanz – Monitors bezieht sich
hauptsächlich auf die Nachweisende Funktionsgruppe. Die neu konstruierte
Funktionsgruppe des Proton – Emittanz – Monitors soll kompatibel zu den im Urzustand
verbleibenden Funktionsgruppen sein.
Bei der Auslegung und der Konstruktion der Nachweisenden Funktionsgruppe müssen
spezielle Rahmenbedingungen und Anforderungen hinsichtlich des Strahlenschutzes
erfüllt werden. Diese werden in den folgenden Kapiteln genauer beschrieben.
Im wesentlichen soll der Funktionsumfang der Nachweisenden Funktionsgruppe erhöht
werden. Die bisher eingesetzte Kamera soll altersbedingt durch eine entsprechende
Kamera ersetzt werden. Außerdem soll ein zusätzlicher Detektor zur Verfügung gestellt
werden. Dabei handelt es sich um einen Photomultiplier. Zum Schutz der Detektoren
und zur Erhöhung der Abbildungsqualität sind verschiedene optische Filter vorzusehen.
Mittels einer Positionierungseinheit soll eine Steigerung der Abbildungsqualität erreicht
werden. Diese hat die Aufgabe die Detektoren in drei verschiedenen Achsen zu
verstellen. Dies ist insbesondere notwendig, weil sich die Emissionsstrecke der
Synchrotronstrahlung und somit der Fokuspunkt und damit die Bildgröße verändert. Um
immer die optimale Bildweite einhalten zu können, müssen die Detektoren in Richtung
der Strahlachse verstellbar gelagert werden.
Die Nachweisende Funktionsgruppe des Proton – Emittanz – Monitors, welche neu zu
konstruieren ist, dient der Strahlprofilkontrolle. Hierfür sind zwei Detektoren nötig, die
das transversale Profil und die Intensität des Strahls betrachten. Als erstes wird ein
Photomultiplier dazu verwendet die Lichtstärke zu messen. Dadurch wird untersucht in
welchem Bereich der Strahl der Synchrotronstrahlung einfällt. In diesen Bereich soll die
Kamera gefahren werden. Mittels der Kamera wird die optimale Abbildweite angefahren.
Die eingesetzte Kamera soll ein Bild vom Synchrotronstrahlfleck aufnehmen. Die Daten
des Kamerabildes werden online ausgewertet und lassen eine zeitnahe Beurteilung der
Teilchenstrahlaufweitung zu. Dazu wird die Häufung und die Intensität der einzelnen
Kapitel 2: Die Aufgabenstellung ______________________________________________________________________
- 25 -
Bildpunkte der Kamera ausgewertet und in eine Normalverteilung umgerechnet. Hieraus
lässt sich die Profilqualität und somit die Aufweitung des Strahls beurteilen.
Die Detektoren sollen nur die einfallende Synchrotronstrahlung betrachten. Deshalb darf
in den Monitor kein Fremdlicht einfallen. Dies ist besonders wichtig, da die Detektoren
sonst falsche Signale erhalten und die daraus resultierenden Ergebnisse keinen
Rückschluss auf die Strahl – Emittanz3 zulassen würden. Aus diesem Grund ist der
Monitor lichtdicht zu konstruieren.
Die im Rahmen dieser Diplomarbeit durchzuführenden Aufgaben beinhalten:
• Auslegung und Konstruktion der Nachweisenden Funktionsgruppe des
Protonen – Emittanz – Monitors unter Berücksichtigung der Schnittstellen
zu anderen Funktionsgruppen und der Prämisse der online und zeitnahen
Auswertungsmöglichkeit
• Auslegung und Konstruktion bezüglich der fernsteuerbaren
Positionierungseinheit
• Auslegung und Konstruktion einer Filterhöhenverstellung und eines
Filterwechselmechanismus
• Auslegung und Konstruktion der Detektoraufnahme, des
Detektorwechsels und der Detektorenfixierung
• Auslegung und Konstruktion der Abschirmung gegen äußere Einflüsse
wie z.B. Fremdlicht, Verunreinigung, Beschädigung und
Untergrundstrahlung
• Auslegung und Konstruktion eines Tragegestelles für die Nachweisende
Funktionsgruppe.
• Betreuung des Projektes bis zur Fertigungsfreigabe und die Erstellung
der für die Fertigung benötigen Unterlagen
• Erstellung der Montageanleitung und der Betriebsanweisung
3 Die Emittanz beschreibt als Gütekriterium die Auffächerung und den Querschnitt eines Teilchenstrahls. Je weniger der Strahl aufgefächert ist desto geringer ist die Emittanz
Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 26 -
3. Die allgemeinen Grundlagen der Strahlung
In diesem Kapitel werden die allgemeinen Grundlagen der verschiedenen
Strahlungsarten, die im Teilchenbeschleuniger vorkommen, beschrieben. Dazu gehören
die Synchrotronstrahlung und die verschiedenen Untergrundstrahlungsarten. Im
weiteren Verlauf wird auf die möglichen Schädigungen durch die Untergrundstrahlungen
sowie auf die geeigneten Schutzmaßnahmen eingegangen.
3.1. Die verschiedenen Strahlungsarten
In dem Teilchenbeschleuniger HERA kommen verschiedene Arten von Strahlungen vor.
Diese lassen sich aus Sicht der Strahldiagnose grundsätzlich in Nutzstrahlung und
Untergrundstrahlung unterteilen.
In die Gruppe der Nutzstrahlung fällt die zur transversalen Profilmessung eingesetzte
Synchrotronstrahlung mit einer Wellenlänge des sichtbaren Spektrums der
Synchrotronstrahlung in dem Bereich von 370 nm bis 780 nm.
Der Gruppe der Untergrundstrahlung werden verschiedene Strahlungen, wie z.B.
Neutronenstrahlung und Gammastrahlung und außerdem der hochenergetische Bereich
der Synchrotronstrahlung, zugeordnet. Die Neutronen- und Gammastrahlung entsteht
meistens unbeabsichtigt durch technische Störungen im geregelten Betriebsablauf der
Beschleuniger. Die Synchrotronstrahlung entsteht generell durch die zielgerichtete
Nutzung der Beschleuniger.
Die Gruppe der Untergrundstrahlung und die dadurch vorhandenen Gefahrenquellen für
die installierte Technologie im Beschleunigertunnel werden später betrachtet. Im
folgenden Kapitel werden die Eigenschaften, die Entstehung und die Gründe für den
Einsatz der Synchrotronstrahlung erläutert.
Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 27 -
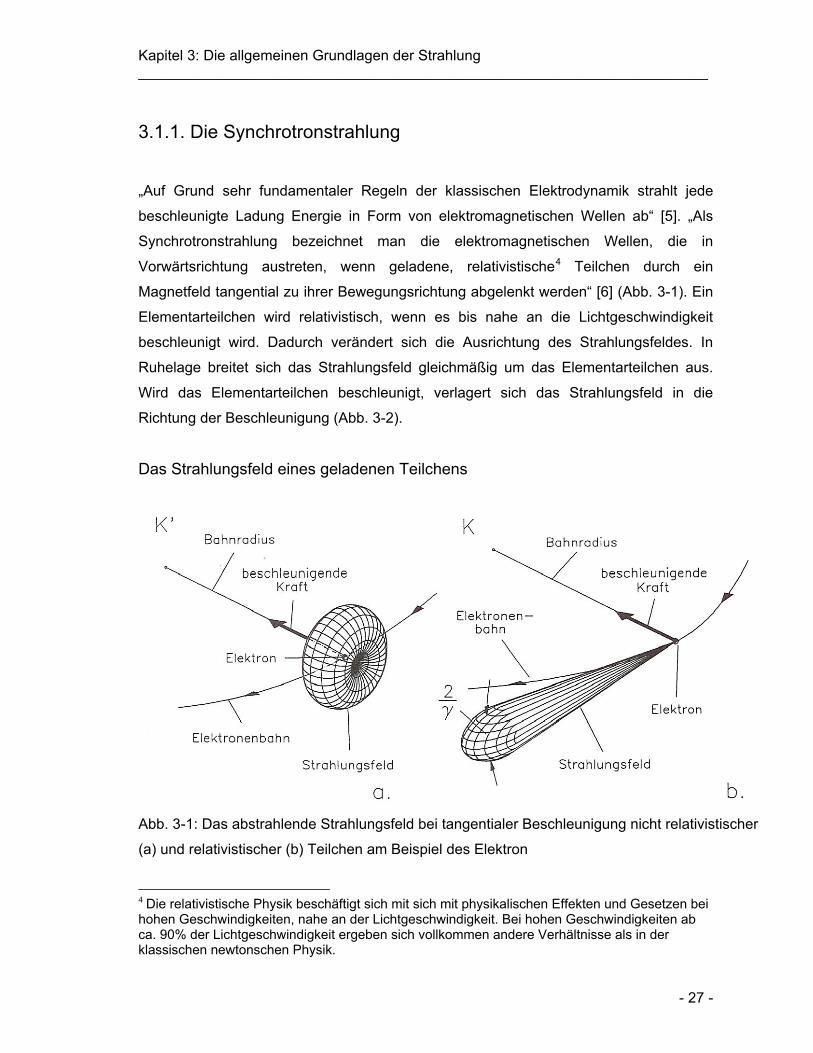
3.1.1. Die Synchrotronstrahlung
„Auf Grund sehr fundamentaler Regeln der klassischen Elektrodynamik strahlt jede
beschleunigte Ladung Energie in Form von elektromagnetischen Wellen ab“ [5]. „Als
Synchrotronstrahlung bezeichnet man die elektromagnetischen Wellen, die in
Vorwärtsrichtung austreten, wenn geladene, relativistische4 Teilchen durch ein
Magnetfeld tangential zu ihrer Bewegungsrichtung abgelenkt werden“ [6] (Abb. 3-1). Ein
Elementarteilchen wird relativistisch, wenn es bis nahe an die Lichtgeschwindigkeit
beschleunigt wird. Dadurch verändert sich die Ausrichtung des Strahlungsfeldes. In
Ruhelage breitet sich das Strahlungsfeld gleichmäßig um das Elementarteilchen aus.
Wird das Elementarteilchen beschleunigt, verlagert sich das Strahlungsfeld in die
Richtung der Beschleunigung (Abb. 3-2).
Das Strahlungsfeld eines geladenen Teilchens
Abb. 3-1: Das abstrahlende Strahlungsfeld bei tangentialer Beschleunigung nicht relativistischer
(a) und relativistischer (b) Teilchen am Beispiel des Elektron
4 Die relativistische Physik beschäftigt sich mit sich mit physikalischen Effekten und Gesetzen bei hohen Geschwindigkeiten, nahe an der Lichtgeschwindigkeit. Bei hohen Geschwindigkeiten ab ca. 90% der Lichtgeschwindigkeit ergeben sich vollkommen andere Verhältnisse als in der klassischen newtonschen Physik.

Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 28 -
Der Schnitt durch das geschwindigkeitsabhängige Strahlungsfeld
Abb. 3-2: Das Verhalten des Strahlungsfeldes bei unterschiedlichen Geschwindigkeiten
Die von den beschleunigten Teilchen emittierte Synchrotronstrahlung weist
Eigenschaften auf, die sie als ein hervorragendes Diagnosewerkzeug auszeichnen.
Dazu gehören unter anderem:
• die scharfe Bündelung und Polarisation
• die hohe Intensität
• der große Wellenlängenbereich, aus dem ein Spektrum wählbar ist
• der durch die Umlauffrequenz des Beschleunigers bestimmte, sehr kurze
Pulse
• das nicht invasive Verfahren bezüglich des Teilchenstrahls
• das sie bedingt durch die konstruktive Ausführung der
Teilchenbeschleuniger auftritt
Bei dem Proton – Emittanz – Monitor ist vor allem die scharfe Bündelung der
Synchrotronstrahlung von großer Bedeutung. Durch diese Eigenschaft der emittierten
Synchrotronstrahlung können direkt Rückschlüsse auf das transversale Profil des
Teilchenstrahls gezogen werden.
Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 29 -
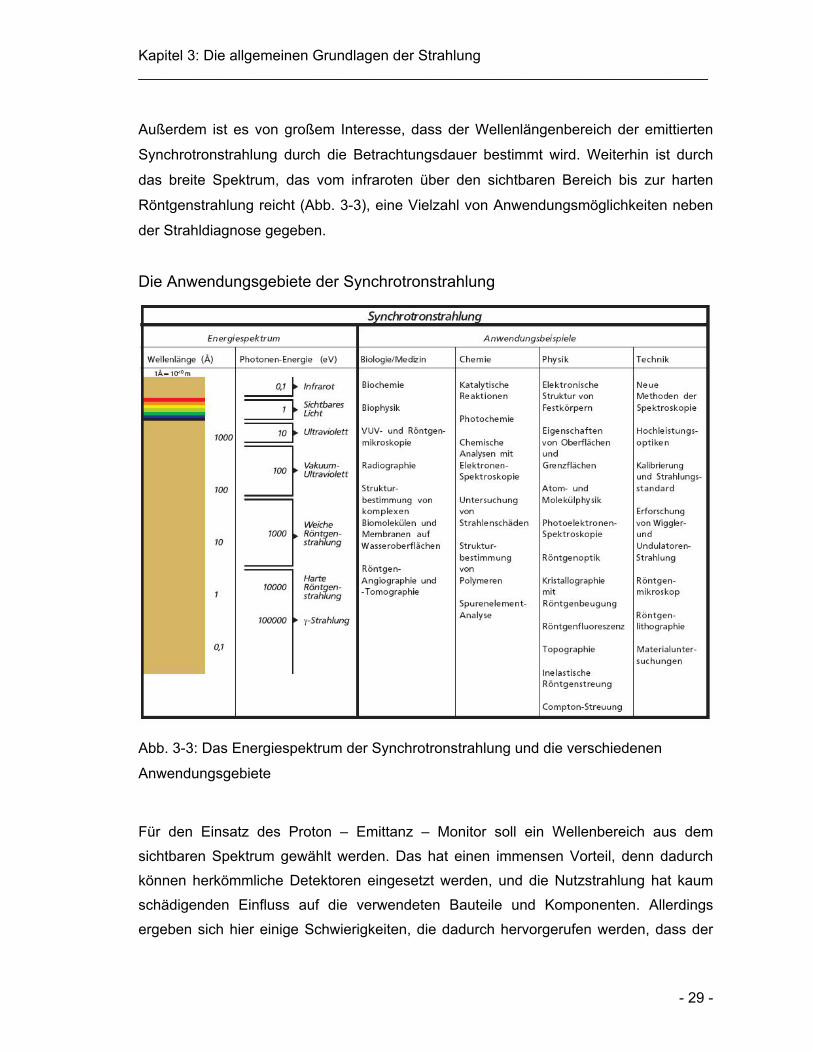
Außerdem ist es von großem Interesse, dass der Wellenlängenbereich der emittierten
Synchrotronstrahlung durch die Betrachtungsdauer bestimmt wird. Weiterhin ist durch
das breite Spektrum, das vom infraroten über den sichtbaren Bereich bis zur harten
Röntgenstrahlung reicht (Abb. 3-3), eine Vielzahl von Anwendungsmöglichkeiten neben
der Strahldiagnose gegeben.
Die Anwendungsgebiete der Synchrotronstrahlung
Abb. 3-3: Das Energiespektrum der Synchrotronstrahlung und die verschiedenen
Anwendungsgebiete
Für den Einsatz des Proton – Emittanz – Monitor soll ein Wellenbereich aus dem
sichtbaren Spektrum gewählt werden. Das hat einen immensen Vorteil, denn dadurch
können herkömmliche Detektoren eingesetzt werden, und die Nutzstrahlung hat kaum
schädigenden Einfluss auf die verwendeten Bauteile und Komponenten. Allerdings
ergeben sich hier einige Schwierigkeiten, die dadurch hervorgerufen werden, dass der

Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 30 -
Protonenstrahl als Synchrotronstrahlquelle genutzt wird. Das hängt mit den
Eigenschaften der Protonen zusammen, die im Gegensatz zu Elektronen erst bei einer
wesentlich höheren Energie Synchrotronstrahlung emittieren. Der Grund dafür liegt in
ihrer um ein Vielfaches höheren Ruhemasse, die einen erheblichen Einfluss auf das
Emissionsverhalten der Teilchen hat. Um diese Zusammenhänge zu verdeutlichen,
werden hier einige Gleichungen der Strahlungsphysik betrachtet. Zu Begin wird der
Unterschied zwischen den Teilchensorten mittels ihrer emittierten Leistung betrachtet.
Die abgestrahlte Leistung der Teilchen berechnet sich aus der Gleichung 3-1.
2
4
4200
2
*)*(
1***6*
RE
cmcePs επ
= (Gl. 3-1)
Ps = Strahlungsleistung
E = Elementarladung
c = Lichtgeschwindigkeit im Vakuum
m0 = Ruhemasse
ε0 = Dielektrizitätskonstante
E = Strahlenergie des Beschleunigers
R = Krümmungsradius des Beschleunigers
Wenn man nun die abgestrahlte Leistung der beiden Teilchenarten, Elektronen und
Protonen, miteinander vergleichen will, werden in die Gleichung 3-1 jeweils die Werte für
ein Proton und ein Elektron einsetzt. Geht man von gleicher Beschleunigungsenergie
und gleichem Radius der Beschleunigerstrecke aus, ergibt sich das Verhältnis der
abgestrahlten Leistung zu der folgenden Gleichung 3-2.
13
4
2
2
,
, 10*13.1**
=⎟⎟⎠
⎞⎜⎜⎝
⎛=
cmcm
SS
e
p
ps
es (Gl. 3-2)
kinetische Energie des Proton: 227.938²*c
MeVcm p =
kinetische Energie des Elektron: 2511.0²*c
MeVcm e =
Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 31 -
Wie man aus dem Ergebnis unschwer erkennen kann, ist die benötigte Energie bei
einem Proton um ein Vielfaches höher als bei einem Elektron. Dieser Sachverhalt
beinhaltet mehr Probleme als dem Betrachter im ersten Moment bewusst werden. Denn
nicht nur die abgestrahlte Leistung ist wesentlich von der Ruhemasse des Teilchens
abhängig, sondern auch das emittierte Wellenspektrum. Deshalb soll hier die
„charakteristische Wellenlänge (λc)“ des Protonstrahls berechnet werden. Die
„charakteristische Wellenlänge“ beschreibt das emittierte Spektrum der
Synchrotronstrahlung, das in dem Teilchenbeschleuniger HERA erreicht wird.
Die Gleichung dafür lautet:
cc
cωπλ **2
= (Gl. 3-3)
cλ = charakteristische Wellenlänge cω = kritische Frequenz c = Lichtgeschwindigkeit im Vakuum wobei sich ωc, die kritische Frequenz, durch folgende Gleichung
Rc
c *2**3 3γω = (Gl. 3-4)
cω = kritische Frequenz c = Lichtgeschwindigkeit im Vakuum
γ = Lorentzfaktor R = Krümmungsradius des Beschleunigers berechnen lässt. Zur Berechnung der kritischen Frequenz benötigt man den
Lorentzfaktor, der sich wiederum aus der Gleichung 3-5 berechnen lässt.
Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 32 -
20 *cmE
=γ (Gl. 3-5)
γ = Lorentzfaktor
E = Strahlenergie des Beschleunigers
c = Lichtgeschwindigkeit im Vakuum
m0 = Ruhemasse
Setzt man nun die angegebenen Werte ein, so kommt man zu dem folgenden Ergebnis:
E = Strahlenergie Einheit in eV5 (HERA Proton Ring; Ep = 920 GeV)
mp*c² = 0.93827 GeV
R = Krümmungsradius des Beschleunigers (HERA Proton – Ring;
R = 1002.68 m)
1152289.980=γ
sc110*2279.4 14=ω
mc μλ 45.4=
Wie man an diesem Ergebnis sieht, wird durch die beschleunigten Protonen eine Wellenlänge emittiert, die über der des sichtbaren Bereichs6 in dem Infraroten liegt. Aus diesem Grund muss ein Kunstgriff, der in dem weiteren Verlauf erläutert wird, zur Erzeugung einer Wellenlänge aus dem sichtbaren Spektrum angewendet werden. Das emittierte Wellenspektrum der Synchrotronstrahlung ist durch die Zeitdauer der Beobachtung an einem festen Beobachtungspunkt bestimmt. Ist die Zeitdauer der Beobachtung kurz, so ist die emittierte Wellenlänge klein. Die berechnete charakteristische Wellenlänge ist zu klein, aus diesem Grund muss die Zeitdauer der Beobachtung herabgesenkt werden. Die angewendete Theorie geht von der Entstehung der Synchrotronstrahlung im Zentrum des Magneten aus. Die Betrachtungsdauer der in dem Zentrum des Dipolmagneten emittierten Synchrotronstrahlung ist zu lang. Aus
5 1 eV entspricht 1,602 * 10-19 J 6 sichtbarer Bereich 370nm bis 780nm
Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 33 -
diesem Grund wird die im Randfeld des Magneten emittierte Synchrotronstrahlung betrachtet. Dadurch wird die Beobachtungsdauer kürzer und somit die emittierte Wellenlänge der Synchrotronstrahlung ebenfalls. Hierin liegt auch die Begründung für die Notwendigkeit der verfahrbaren Detektoren. Der Emissionsort der Synchrotronstrahlung ist nicht genau bekannt, daher müssen die Detektoren verfahren werden können, um somit die optimale Abbildweite zu erreichen. Nachdem die Grundlagen der Entstehung der Synchrotronstrahlung nun näher erläutert sind, soll an dieser Stelle genauer auf die scharfe Bündelung eingegangen werden. Die Winkelaufweitung der Strahlung soll an dieser Stelle berechnet werden. Diese berechnet sich nach der folgenden Gleichung:
γ1
≈Θ (Gl. 3-6)
γ = Lorentzfaktor
Θ = Abstrahlungswinkel
rad310*079864.1 −=Θ Diese geringe Strahlaufweitung von 1.079864 * 10-3 rad kann als fast parallel betrachtet werden. Aus den Betrachtungen wird deutlich, dass die Synchrotronstrahlung für die Diagnosezwecke ein sehr gut geeignetes Medium ist. Das Abbild des Protonenstrahls, das von der Synchrotronstrahlung übertragen wird, entspricht fast genau dem Spiegelbild des Teilchenstrahls selbst. Hinzu kommt, dass dieses angewendete Messverfahren keinen Einfluss auf den Protonenstrahl hat. Weiterhin ist der Proton – Emittanz – Monitor an einem Ort positioniert, an dem bereits eine Strahlumlenkung stattfindet. Dadurch entsteht die Synchrotronstrahlung unabhängig von ihrem Nutzen für die Diagnostik, und es entsteht durch den Betrieb des Monitors kein zusätzlicher Aufwand für die Strahlführung. Die abgegebene Energie wird dem Teilchenstrahl durch die entsprechenden Beschleunigerstrukturen wieder zugeführt.

Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 34 -
3.1.2. Die Untergrundstrahlung
Die vorkommende Untergrundstrahlung in dem Beschleuniger HERA beinhaltet
verschiedene Arten von Strahlungen. Eine der vorkommenden Strahlungen ist im
vorangegangenen Kapitel ausführlich erläutert worden, die Synchrotronstrahlung. Diese
Strahlung wird in dem Fall des Proton – Emittanz – Monitors als Nutzstrahlung
verwendet. Da sie bei jeder Strahlumlenkung entsteht und ein sehr breites Spektrum
besitzt, das bis in die harte Röntgenstrahlung reicht, wird auch die Synchrotronstrahlung
zum Teil als Untergrundstrahlung betrachtet. Dieses Problem tritt, wie im Kapitel über
die Synchrotronstrahlung beschrieben, vorwiegend bei der Beschleunigung der
Elektronen auf. Da sich die Strahlführungswege für beide Teilchenarten in einem Tunnel
befinden, muss dieses Problem auch bei dieser Konstruktion berücksichtigt werden.
Eine weitere Gruppe der Untergrundstrahlung ist die Neutronenstrahlung, die in den
Beschleunigern entstehen kann. Dies geschieht, wenn der Teilchenstrahl, ausgelöst
durch Störungen im technischen Betrieb, seinen vorgegebenen Orbit verlässt und mit
der Wand des Strahlrohrs kollidiert. Bei dieser Sekundärreaktion entsteht
Neutronenstrahlung und γ-Strahlung. Durch diese Strahlungen können an den
installierten Diagnoseinstrumenten und anderen Komponenten erhebliche Schäden
entstehen.
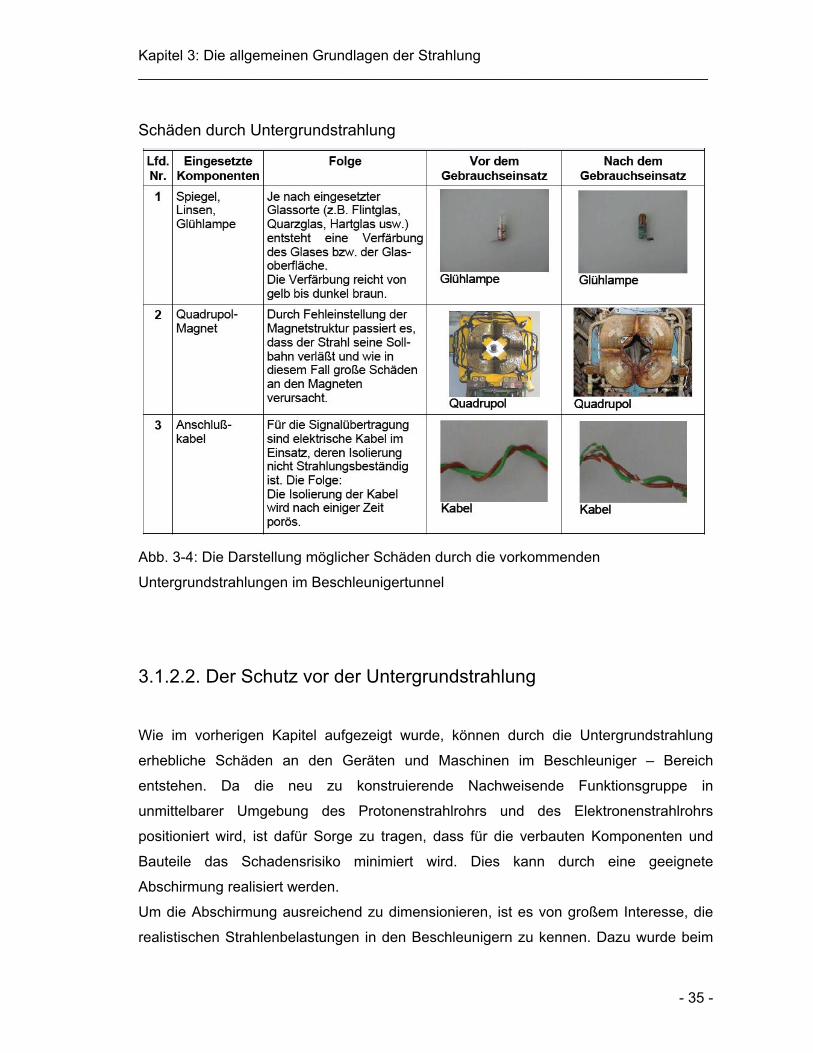
3.1.2.1. Die Schäden durch die Untergrundstrahlung
Dieses Kapitel gibt einen Ausblick über einen Teil der möglichen Beschädigungen der
Komponenten, die sich im HERA – Tunnel befinden. In der Abbildung 3-4 sind drei
Beispiele aufgeführt, die für die Neukonstruktion des Proton – Emittanz – Monitors
relevant sind. Dabei handelt es sich um Bauteile aus den Materialien Glas, Metall und
Kunststoff. Diese Materialien werden in optischen Elementen, Bauteilen und elektrischen
Komponenten eingesetzt.
Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 35 -
Schäden durch Untergrundstrahlung
Abb. 3-4: Die Darstellung möglicher Schäden durch die vorkommenden
Untergrundstrahlungen im Beschleunigertunnel
3.1.2.2. Der Schutz vor der Untergrundstrahlung
Wie im vorherigen Kapitel aufgezeigt wurde, können durch die Untergrundstrahlung
erhebliche Schäden an den Geräten und Maschinen im Beschleuniger – Bereich
entstehen. Da die neu zu konstruierende Nachweisende Funktionsgruppe in
unmittelbarer Umgebung des Protonenstrahlrohrs und des Elektronenstrahlrohrs
positioniert wird, ist dafür Sorge zu tragen, dass für die verbauten Komponenten und
Bauteile das Schadensrisiko minimiert wird. Dies kann durch eine geeignete
Abschirmung realisiert werden.
Um die Abschirmung ausreichend zu dimensionieren, ist es von großem Interesse, die
realistischen Strahlenbelastungen in den Beschleunigern zu kennen. Dazu wurde beim

Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 36 -
DESY von der Strahlenschutzgruppe D3 ein Bericht (Ausgabe D3-32) verfasst. Mit den
in diesem Bericht erfassten Werten wurde durch die MDI – Gruppe eine Empfehlung zur
Dimensionierung der Neutronenabschirmung erstellt. Diese Empfehlung gibt Grenzwerte
für elektrische Komponenten, wie z.B. Dioden, Transistoren und IC’s vor. Da diese
Komponenten in fast jedem elektrischen Gerät verbaut sind und dies die anfälligsten
Komponenten der Neukonstruktion des Proton – Emittanz – Monitors sind, werden diese
Werte als Richtlinie für die Abschirmung vorgegeben.
Als Grenzwerte der Neutronenfluenzen werden für Dioden, Transistoren und IC’s Φa =
1013 cm-2 angegeben. Laut Strahlenschutzbericht werden die Schäden hauptsächlich
von Neutronen mit einer Energie oberhalb 1 MeV verursacht. In einem Meter Abstand,
das ist ungefähr die Entfernung vom Strahlrohr zu der Nachweisenden Funktionsgruppe
des Proton – Emittanz – Monitors, beträgt die Neutronenfluenz, der Neutronen mit einer
Energie, die größer als 1 MeV ist, Φa (En>1MeV) = 4*1011 cm-2. Bei einer
Energieverteilung mit einem ausgeprägtem Maximum von 0.8 MeV [7].
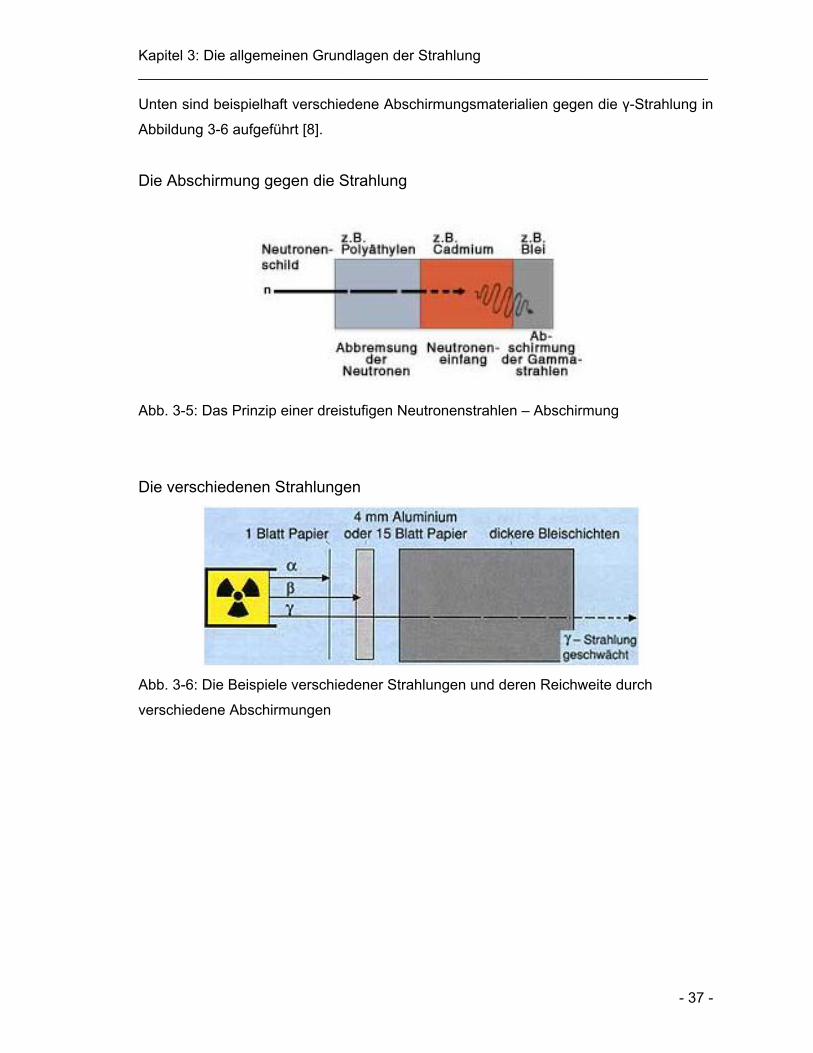
Aus dem Bericht „Neutronen Abschirmung in HERA“ geht weiterhin hervor, dass die
Abschirmung in drei Stufen (Abb. 3-5) zu realisieren ist. Zunächst werden die schnellen
Neutronen bis auf eine thermische Energie von ca. Eth = 0.025 eV abgebremst. Dies
geschieht durch elastische Stöße mit leichten Atomkernen, wie zum Beispiel
Wasserstoffatomen. Im Anschluss sollen die abgebremsten Neutronen von einem
geeigneten Material absorbiert werden. Dafür eigenen sich am besten Materialien, die
einen hohen Bor – oder Cadmium – Anteil aufweisen. Während des Brems- und
Absorbtzionsprozeses entsteht als Sekundärstrahlung γ-Strahlung mit einer Energie von
ca. 480 keV. Gegen diese relativ schwache γ-Strahlung muss eine weitere
Abschirmungsschicht vorgesehen werden. Da die im Beschleuniger entstehende harte
γ-Strahlung wesentlich höhere Energien aufweist, wird die letzte Stufe der Abschirmung
an die Anforderungen der harten γ-Strahlung angepasst. Die im Beschleuniger
entstehende Neutronenstrahlung ist die gefährlichere Strahlung. Die Abschirmung
gegen die Neutronenstrahlung ist wesentlich aufwendiger als die gegen γ-Strahlung. Im
allgemeinem kann man die Strahlenbelastungen, denen die Bauteile und Komponenten
ausgesetzt sind, nur minimieren und nicht vollständig abschirmen.
Kapitel 3: Die allgemeinen Grundlagen der Strahlung ______________________________________________________________________
- 37 -
Unten sind beispielhaft verschiedene Abschirmungsmaterialien gegen die γ-Strahlung in
Abbildung 3-6 aufgeführt [8].
Die Abschirmung gegen die Strahlung
Abb. 3-5: Das Prinzip einer dreistufigen Neutronenstrahlen – Abschirmung
Die verschiedenen Strahlungen
Abb. 3-6: Die Beispiele verschiedener Strahlungen und deren Reichweite durch
verschiedene Abschirmungen

Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 38 -
4. Die Konzeptphase
Nachdem in der Informationsphase die Aufgabenstellung und die allgemeinen
Grundlagen der vorkommenden Strahlungsarten genauer erläutert sind, wird nun mit der
Konzeptphase der Produktentwicklung begonnen. Da der Bedarf und der Nutzwert der
neu zu konstruierenden Nachweisenden Funktionsgruppe des Proton – Emittanz –
Monitors bereits durch das DESY festgestellt wurde, kann die Konzeptphase bei dieser
Produktentwicklung sehr kurz gehalten werden.
In den folgenden Kapiteln wird ein Konzept für die Neukonstruktion der Nachweisenden
Funktionsgruppe erstellt. Das Konzept wird aus der Aufgabenstellung und der
Anforderungsliste, die im folgendem erstellt wird, erarbeitet. Im Anschluss wird der
methodische Teil der Konstruktion dargestellt. Zu Beginn der Konzeptphase werden die
geforderten Funktionen analysiert und die Wirkprinzipien betrachtet. Für die
Wirkprinzipien werden Lösungsansätze ermittelt, diese werden bewertet, und aus den
bewerteten Lösungsansätzen wird mittels des Morphologischen Kastens die optimale
Gesamtlösung bestimmt.
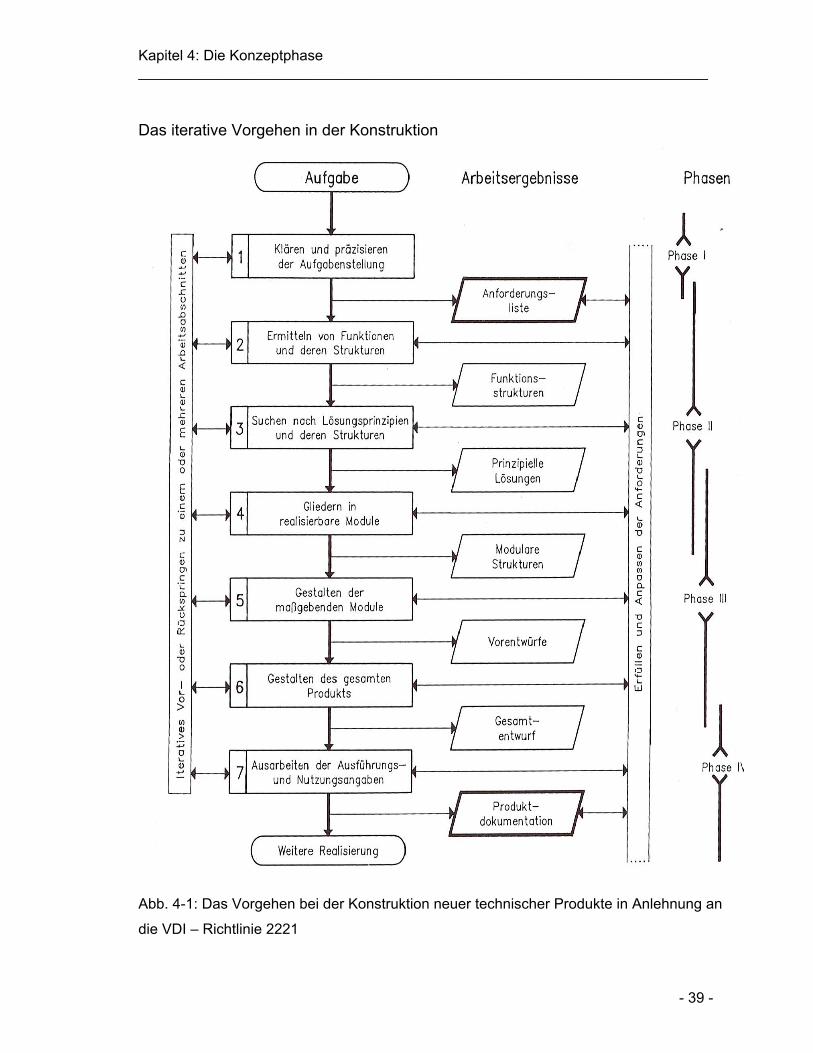
Der Auslegungsprozess und die Konstruktion werden in Anlehnung an die VDI –
Richtlinie 2221 (Abb. 4-1) durchgeführt. Da die Aufgabe in den vorherigen Kapiteln
bereits geklärt und präzisiert wurde, kann in dem folgenden Kapitel direkt mit der
Anforderungsliste begonnen werden.
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 39 -
Das iterative Vorgehen in der Konstruktion
Abb. 4-1: Das Vorgehen bei der Konstruktion neuer technischer Produkte in Anlehnung an
die VDI – Richtlinie 2221

Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 40 -
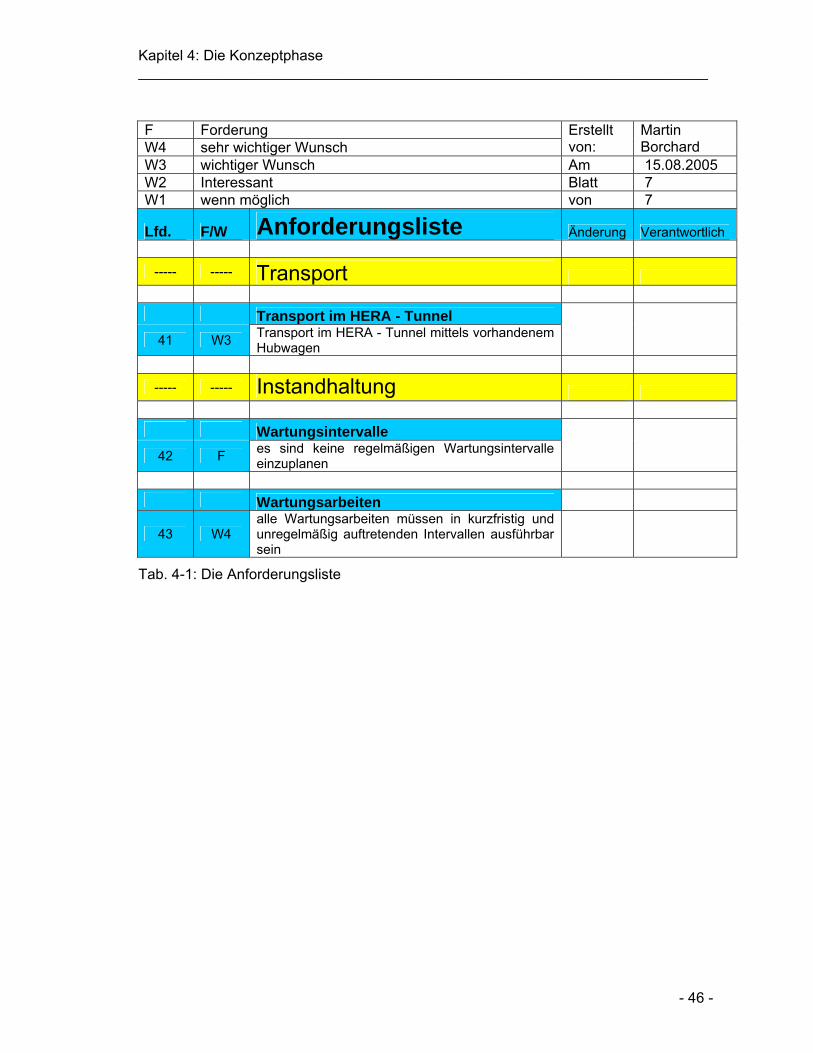
4.1. Die Anforderungsliste
Die Anforderungsliste wurde in Zusammenarbeit mit den verantwortlichen Projektleitern
der Gruppe MDI ausgearbeitet. Dabei waren die Interessen der verschiedenen
Fachabteilungen vom DESY, aus dem physikalischen Bereich, der Fertigung, der
Konstruktion und der Organisation, zu berücksichtigen.
In der Anforderungsliste gibt es zwei unterschiedliche Qualitäten an
Bewertungsmöglichkeiten. Die Anforderungen können als eine Forderung eingestuft
werden oder als ein Wunsch. Die Wünsche sollen in die Konstruktion einfließen, wenn
der dadurch entstehende Nutzen, die dafür aufzuwendenden Herstellungskosten
rechtfertigt. Die formulierten Wünsche sind wiederum in vier verschiedene Stufen
unterteilt, diese stellen eine Abstufung des akzeptablen Gefälles zwischen dem Nutzen
und den erhöhten Herstellungskosten dar. Die gestellten Forderungen sind im
Gegensatz zu den Wünschen definierte Anforderungen, die unabdingbar in der
Konstruktion umgesetzt werden müssen [9].
F Forderung W4 sehr wichtiger Wunsch
Erstellt von:
Martin Borchard
W3 wichtiger Wunsch Am 15.08.2005 W2 Interessant Blatt 1 W1 wenn möglich von 7
Lfd. F/W Anforderungsliste Änderung Verantwortlich
----- ----- Geometrie Abmessungen
1 F äußere Abmessungen müssen kleiner als x = 700mm ; y = 700mm ; z = 1200mm sein
Anordnung
2 F Proton - Emittanz - Monitor muss achsparallel zum Protonen - Strahlrohr ausgerichtet sein
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 41 -
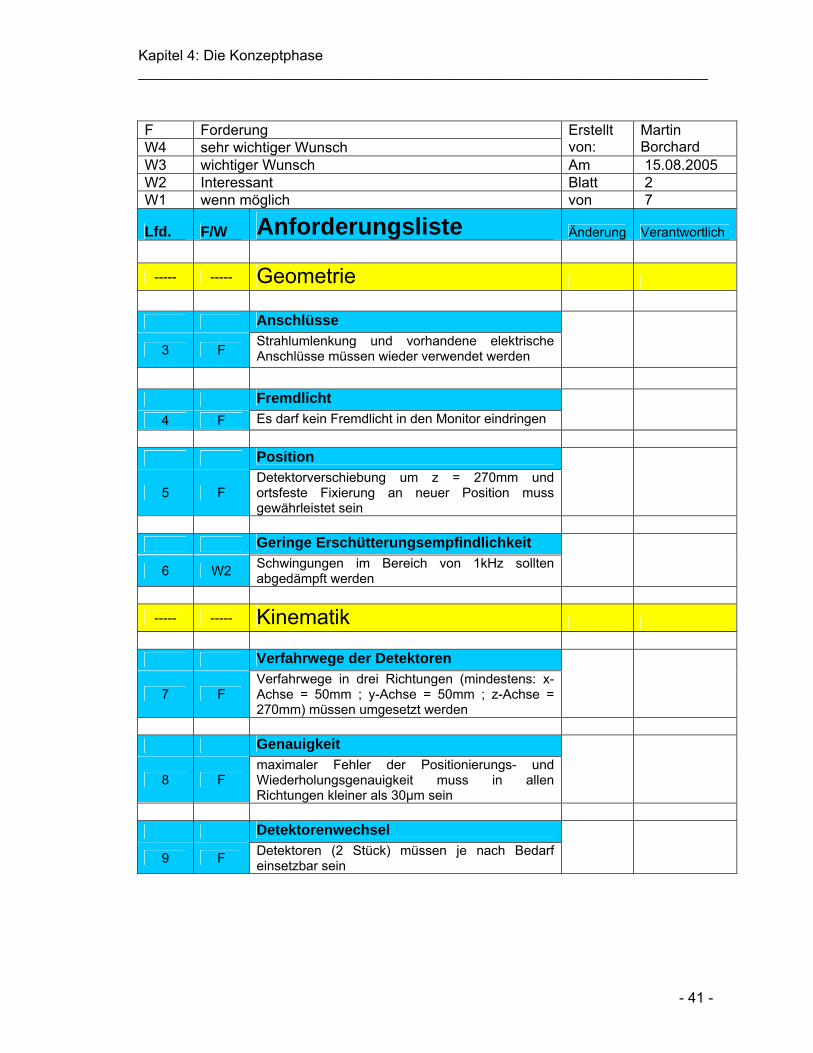
F Forderung W4 sehr wichtiger Wunsch
Erstellt von:
Martin Borchard
W3 wichtiger Wunsch Am 15.08.2005 W2 Interessant Blatt 2 W1 wenn möglich von 7
Lfd. F/W Anforderungsliste Änderung Verantwortlich
----- ----- Geometrie
Anschlüsse
3 F Strahlumlenkung und vorhandene elektrische Anschlüsse müssen wieder verwendet werden
Fremdlicht 4 F Es darf kein Fremdlicht in den Monitor eindringen Position
5 F Detektorverschiebung um z = 270mm und ortsfeste Fixierung an neuer Position muss gewährleistet sein
Geringe Erschütterungsempfindlichkeit
6 W2 Schwingungen im Bereich von 1kHz sollten abgedämpft werden
----- ----- Kinematik
Verfahrwege der Detektoren
7 F Verfahrwege in drei Richtungen (mindestens: x-Achse = 50mm ; y-Achse = 50mm ; z-Achse = 270mm) müssen umgesetzt werden
Genauigkeit
8 F maximaler Fehler der Positionierungs- und Wiederholungsgenauigkeit muss in allen Richtungen kleiner als 30μm sein
Detektorenwechsel
9 F Detektoren (2 Stück) müssen je nach Bedarf einsetzbar sein

Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 42 -
F Forderung W4 sehr wichtiger Wunsch
Erstellt von:
Martin Borchard
W3 wichtiger Wunsch Am 15.08.2005 W2 Interessant Blatt 3 W1 wenn möglich von 7
Lfd. F/W Anforderungsliste Änderung Verantwortlich
----- ----- Kinematik Verstellwege der Filter
10 W4 Verstellung und Justierung der Filter sollte in Richtung der y-Achse um ± 25mm ermöglicht werden
Vibrationsarmes Bewegen der Detektoren
11 W3 schwingungsarmes Bewegen der Positionierungs-einheit
Geschwindigkeiten
12 W1 keine besonderen Anforderungen
Beschleunigungen 13 W1 keine besonderen Anforderungen
----- ----- Kräfte
Statische Belastungen: Bauteile
14 F maximale Verformung der Bauteile der Positionierungseinheit in y - Richtung ≤ 0.3mm bei Biegung und Zug/Druck
Statische Belastungen: Positionierungseinheit
15 F Gesamtabsenkung der Detektoren in y - Richtung ≤ 1mm
Statische Belastungen: Abschirmung
16 F unvorhersehbare, senkrechte Belastung von maximal 1.5 kN dürfen nicht zum Versagen führen
Dynamische Belastungen: Positionierungseinheit
17 F maximale Verformung der Positionierungseinheit durch dynamische Belastung ≤ 0.1mm
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 43 -
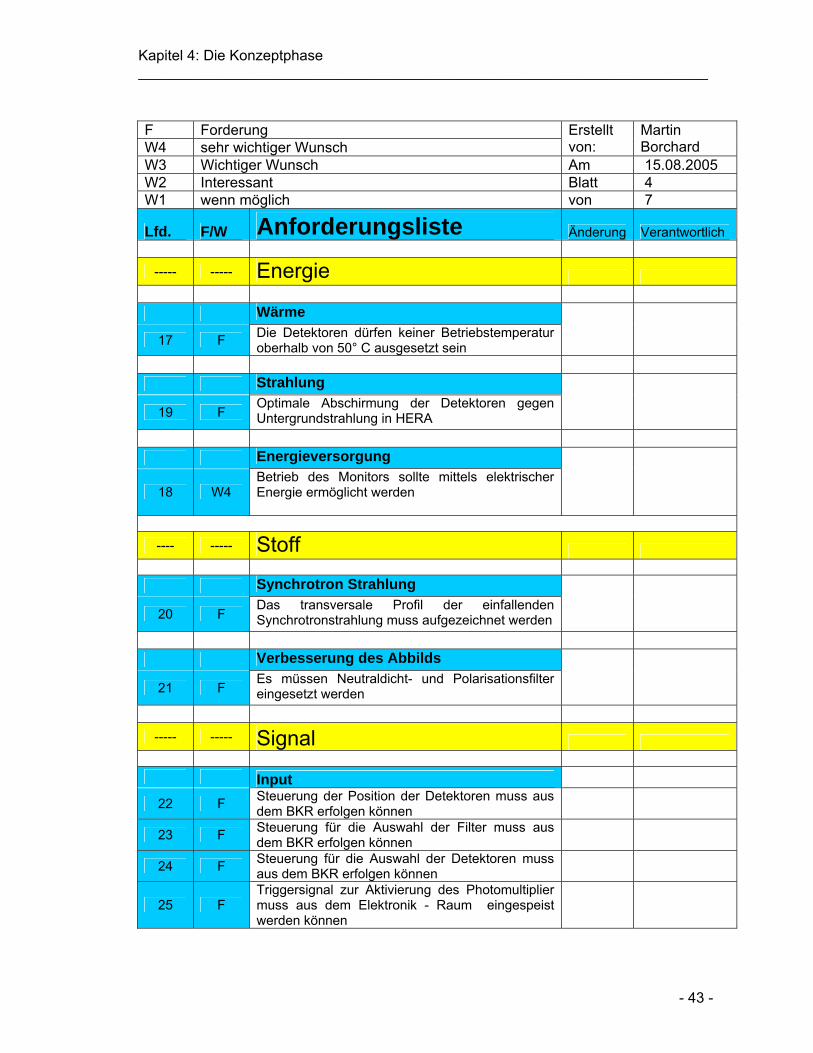
F Forderung W4 sehr wichtiger Wunsch
Erstellt von:
Martin Borchard
W3 Wichtiger Wunsch Am 15.08.2005 W2 Interessant Blatt 4 W1 wenn möglich von 7
Lfd. F/W Anforderungsliste Änderung Verantwortlich
----- ----- Energie Wärme
17 F Die Detektoren dürfen keiner Betriebstemperatur oberhalb von 50° C ausgesetzt sein
Strahlung
19 F Optimale Abschirmung der Detektoren gegen Untergrundstrahlung in HERA
Energieversorgung
18 W4 Betrieb des Monitors sollte mittels elektrischer Energie ermöglicht werden
---- ----- Stoff Synchrotron Strahlung
20 F Das transversale Profil der einfallenden Synchrotronstrahlung muss aufgezeichnet werden
Verbesserung des Abbilds
21 F Es müssen Neutraldicht- und Polarisationsfilter eingesetzt werden
----- ----- Signal
Input
22 F Steuerung der Position der Detektoren muss aus dem BKR erfolgen können
23 F Steuerung für die Auswahl der Filter muss aus dem BKR erfolgen können
24 F Steuerung für die Auswahl der Detektoren muss aus dem BKR erfolgen können
25 F Triggersignal zur Aktivierung des Photomultiplier muss aus dem Elektronik - Raum eingespeist werden können
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 44 -
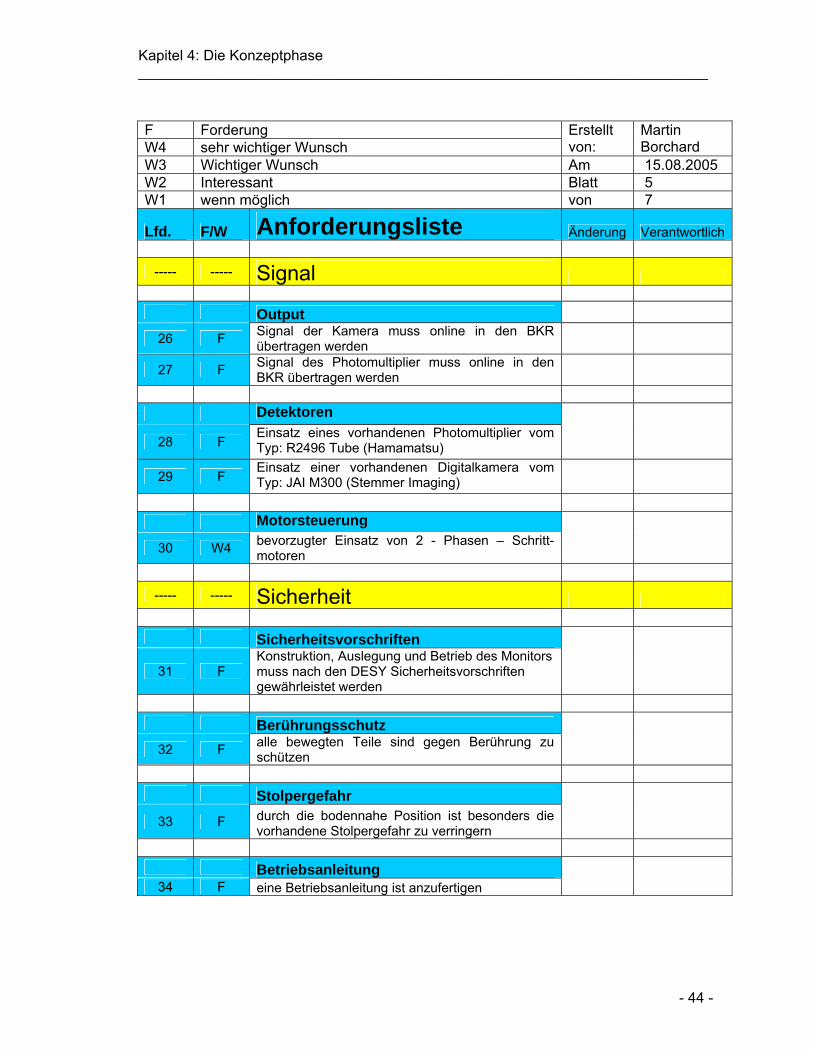
F Forderung W4 sehr wichtiger Wunsch
Erstellt von:
Martin Borchard
W3 Wichtiger Wunsch Am 15.08.2005 W2 Interessant Blatt 5 W1 wenn möglich von 7
Lfd. F/W Anforderungsliste Änderung Verantwortlich
----- ----- Signal Output
26 F Signal der Kamera muss online in den BKR übertragen werden
27 F Signal des Photomultiplier muss online in den BKR übertragen werden
Detektoren
28 F Einsatz eines vorhandenen Photomultiplier vom Typ: R2496 Tube (Hamamatsu)
29 F Einsatz einer vorhandenen Digitalkamera vom Typ: JAI M300 (Stemmer Imaging)
Motorsteuerung
30 W4 bevorzugter Einsatz von 2 - Phasen – Schritt-motoren
----- ----- Sicherheit
Sicherheitsvorschriften
31 F Konstruktion, Auslegung und Betrieb des Monitors muss nach den DESY Sicherheitsvorschriften gewährleistet werden
Berührungsschutz
32 F alle bewegten Teile sind gegen Berührung zu schützen
Stolpergefahr
33 F durch die bodennahe Position ist besonders die vorhandene Stolpergefahr zu verringern
Betriebsanleitung
34 F eine Betriebsanleitung ist anzufertigen
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 45 -
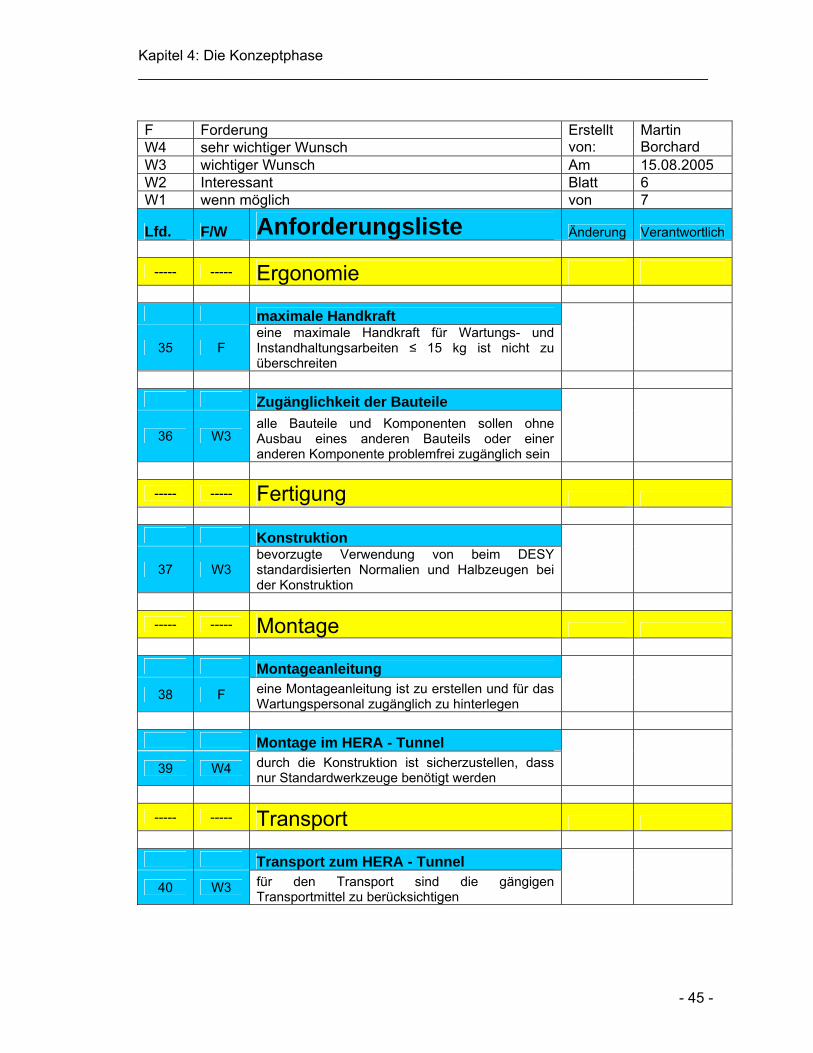
F Forderung W4 sehr wichtiger Wunsch
Erstellt von:
Martin Borchard
W3 wichtiger Wunsch Am 15.08.2005 W2 Interessant Blatt 6 W1 wenn möglich von 7
Lfd. F/W Anforderungsliste Änderung Verantwortlich
----- ----- Ergonomie maximale Handkraft
35 F eine maximale Handkraft für Wartungs- und Instandhaltungsarbeiten ≤ 15 kg ist nicht zu überschreiten
Zugänglichkeit der Bauteile
36 W3 alle Bauteile und Komponenten sollen ohne Ausbau eines anderen Bauteils oder einer anderen Komponente problemfrei zugänglich sein
----- ----- Fertigung
Konstruktion
37 W3 bevorzugte Verwendung von beim DESY standardisierten Normalien und Halbzeugen bei der Konstruktion
----- ----- Montage
Montageanleitung
38 F eine Montageanleitung ist zu erstellen und für das Wartungspersonal zugänglich zu hinterlegen
Montage im HERA - Tunnel
39 W4 durch die Konstruktion ist sicherzustellen, dass nur Standardwerkzeuge benötigt werden
----- ----- Transport
Transport zum HERA - Tunnel
40 W3 für den Transport sind die gängigen Transportmittel zu berücksichtigen
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 46 -
F Forderung W4 sehr wichtiger Wunsch
Erstellt von:
Martin Borchard
W3 wichtiger Wunsch Am 15.08.2005 W2 Interessant Blatt 7 W1 wenn möglich von 7
Lfd. F/W Anforderungsliste Änderung Verantwortlich
----- ----- Transport Transport im HERA - Tunnel
41 W3 Transport im HERA - Tunnel mittels vorhandenem Hubwagen
----- ----- Instandhaltung
Wartungsintervalle
42 F es sind keine regelmäßigen Wartungsintervalle einzuplanen
Wartungsarbeiten
43 W4 alle Wartungsarbeiten müssen in kurzfristig und unregelmäßig auftretenden Intervallen ausführbar sein
Tab. 4-1: Die Anforderungsliste

Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 47 -
4.2. Das Erstellen des Konzeptes
Das zu erstellende Konzept orientiert sich an der Anforderungsliste und der
Aufgabenstellung. Wegen des hohen Informationsgehaltes ist eine Skizze ein gut
geeignetes Instrument zur Verdeutlichung eines Konzeptes. Deshalb wird das Konzept
anhand einer Konzeptskizze (Abb. 4-2) dargestellt. Diese beinhaltet, da die meisten
Funktionsgruppen des Proton – Emittanz – Monitors in ihrem Urzustand verbleiben, die
wesentlichen Elemente der Nachweisenden Funktionsgruppe, sowie die Schnittstelle zu
den im Urzustand verbleibenden Funktionsgruppen. Diese Schnittstelle ist ein
Anschlussflansch mit Strahlzuführungsrohr, welches die Optische Funktionsgruppe mit
der Nachweisenden Funktionsgruppe lichtdicht verbindet. Die Konzeptskizze soll einen
Leitfaden für die Ermittlung der Wirkprinzipen und der Lösungsansätze während des
methodischen Konstruierens darstellen.
Die Konzeptskizze
Abb. 4-2: Die Konzeptskizze der Nachweisenden Funktionsgruppe des
Proton – Emittanz – Monitors
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 48 -
4.3. Das methodische Konstruieren
Nachdem das Konzept erstellt ist, wird die Funktionsstruktur des Proton – Emittanz –
Monitors untersucht. Das methodische Konstruieren wird als Vorgehensweise
angewendet, um die den Anforderungen entsprechende optimale Lösung für das zu
konzipierende Produkt zu entwickeln. Dieses angewendete iterative Vorgehen ist an die
in der Phase II, der VDI – Richtlinie 2221 (Abb. 4-1) beschriebenen Punkte angelehnt.
Dieses iterative Vorgehen eignet sich besonders für die Entwicklung und die
Konstruktion technischer Produkte mit der Betonung auf Maschinenbau und
Feinwerktechnik.
Zu Begin der ersten Phase des methodischen Konstruierens werden die in der
Anforderungsliste geforderten Funktionen genauer betrachtet. Dafür werden
verschiedene Diagramme und Darstellungsformen zur Funktionsanalyse angewendet.
Jede Darstellung beinhaltet eine höhere Auflösung der Aufgabenstellung, so dass man
sich über die Funktionsstruktur und die Lösungsansätze mit steigendem
Detaillierungsgrad der Festlegung der Variante annähert.
4.3.1. Die Funktionsstruktur
Als erster Schritt der Funktionsanalyse wird die Gesamtfunktion als Black Box
dargestellt. Die Eingangs- und Ausgangsgrößen, die zur Funktionserfüllung notwendig
sind, werden darin aufgezeigt. Das Black – Box – Schema vernachlässigt die innere
Struktur und befasst sich mit den abstrakten Eingangs- und Ausgangsgrößen. Im
weiteren Verlauf werden die inneren Strukturen und Funktionen weiter aufgelöst.
Dieses Vorgehen dient der systematischen Entwicklung von Lösungsansätzen und der
Variantenfindung für die Teilfunktionen und die Unterfunktionen. Bis schließlich mittels
der Bewertung und des Morphologischen Kastens die Variante festgelegt werden kann.
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 49 -
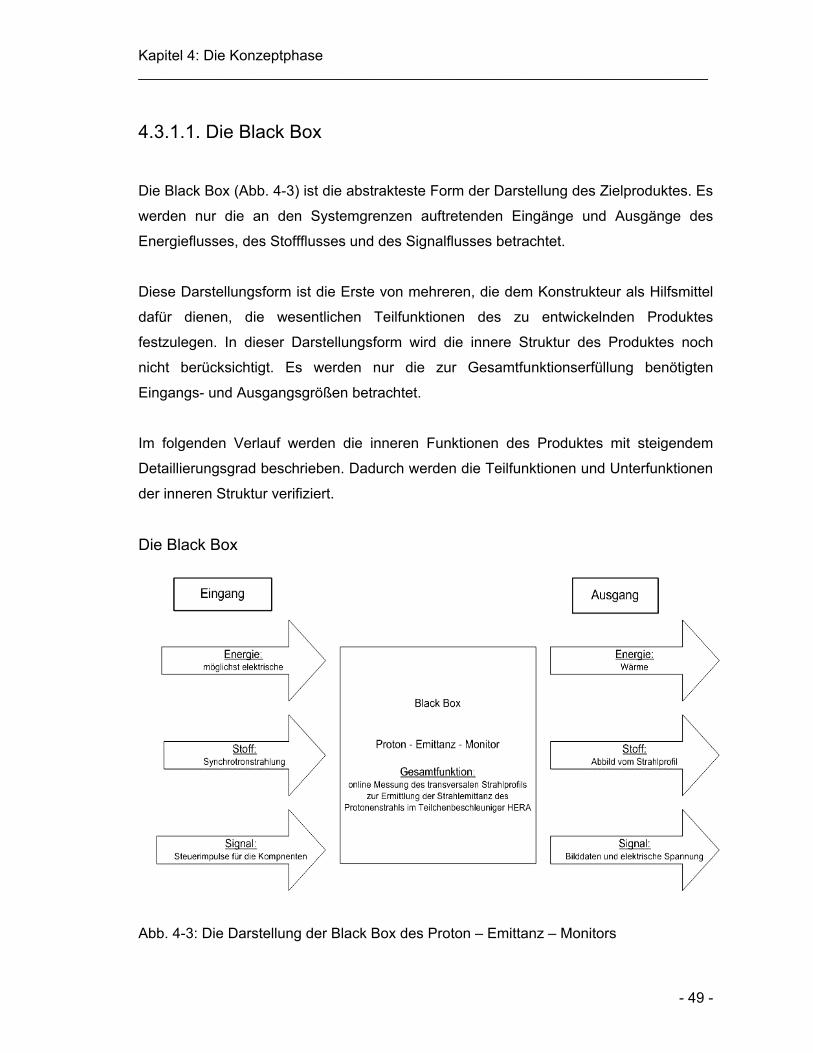
4.3.1.1. Die Black Box
Die Black Box (Abb. 4-3) ist die abstrakteste Form der Darstellung des Zielproduktes. Es
werden nur die an den Systemgrenzen auftretenden Eingänge und Ausgänge des
Energieflusses, des Stoffflusses und des Signalflusses betrachtet.
Diese Darstellungsform ist die Erste von mehreren, die dem Konstrukteur als Hilfsmittel
dafür dienen, die wesentlichen Teilfunktionen des zu entwickelnden Produktes
festzulegen. In dieser Darstellungsform wird die innere Struktur des Produktes noch
nicht berücksichtigt. Es werden nur die zur Gesamtfunktionserfüllung benötigten
Eingangs- und Ausgangsgrößen betrachtet.
Im folgenden Verlauf werden die inneren Funktionen des Produktes mit steigendem
Detaillierungsgrad beschrieben. Dadurch werden die Teilfunktionen und Unterfunktionen
der inneren Struktur verifiziert.
Die Black Box
Abb. 4-3: Die Darstellung der Black Box des Proton – Emittanz – Monitors
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 50 -
4.3.1.2. Die innere Funktionsstruktur
Nachdem in dem Black – Box – Schema die Gesamtfunktion, die drei Eingangs- und die
drei Ausgangsgrößen erläutert wurden, wird nun die innere Struktur des Proton –
Emittanz – Monitors genauer aufgelöst. Dazu wird der innere Verarbeitungsprozess der
Eingangs- und der Ausgangsgrößen betrachtet. Außerdem werden die aus den
Umgebungsbedingungen zu erwartenden Anforderungen mit in die Darstellung
aufgenommen. Dies betrifft die Untergrundstrahlung und die zu dämpfenden
Schwingungen.
In dieser Darstellung der inneren Funktionsstruktur (Abb. 4-4) werden die
Zusammenhänge der Eingangs- und der Ausgangsgrößen deutlich. Zusätzlich werden
hier die inneren Umwandlungsprozesse, die inneren Verknüpfungen des Energie-, Stoff-
und Signalflusses und die damit verbundenen Funktionen genauer beschrieben.
Aus dieser Darstellung und den Angaben der Anforderungsliste werden die
Teilfunktionen und die Unterfunktionen, die zur Erfüllung der Gesamtfunktion benötigt
werden, abgeleitet.

Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 51 -
Die innere Funktionsstruktur
Abb. 4-4: Die Abbildung zeigt die innere Struktur des Proton – Emittanz – Monitors
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 52 -
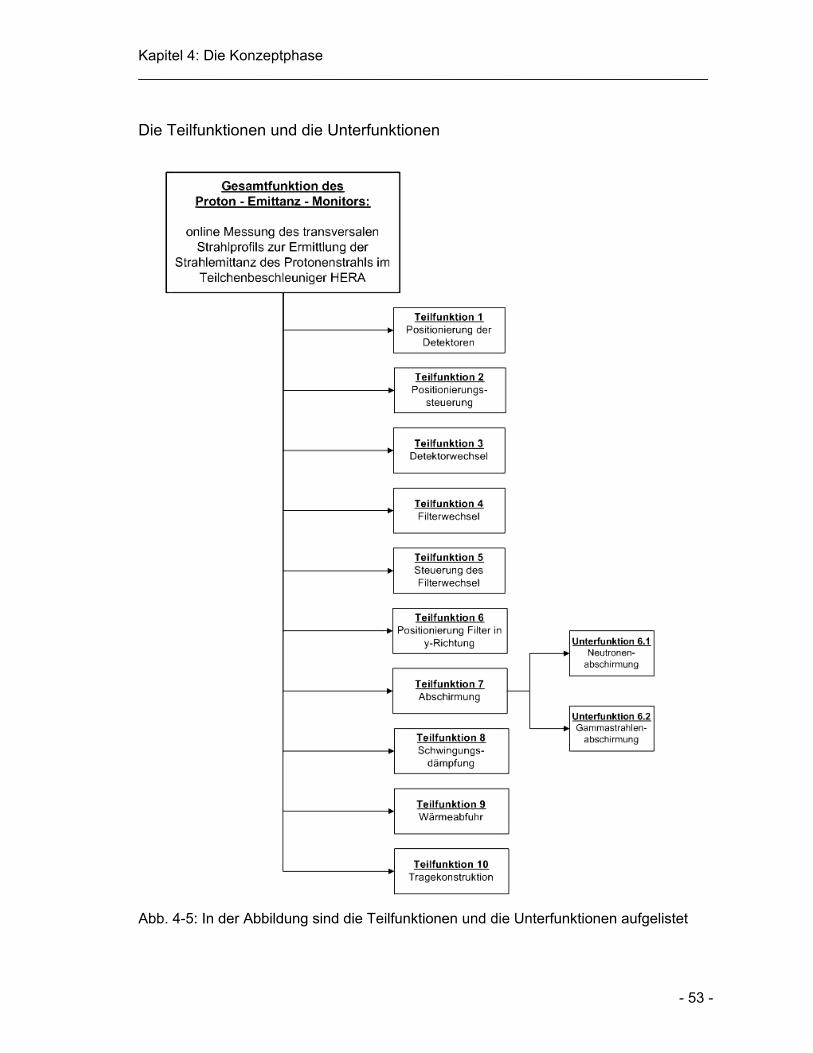
4.3.1.3. Die Teilfunktionen
Die Teilfunktionen und die Unterfunktionen sind aus der inneren Struktur heraus
abgeleitet. Diese sind im Hinblick auf die zu realisierende Gesamtfunktion weiter zu
untersuchen. Dazu werden im folgenden Kapitel für die Teilfunktionen und die
Unterfunktionen Wirkprinzipien und Lösungsansätze erarbeitet, die im weiteren Verlauf
analysiert und bewertet werden.
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 53 -
Die Teilfunktionen und die Unterfunktionen
Abb. 4-5: In der Abbildung sind die Teilfunktionen und die Unterfunktionen aufgelistet
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 54 -
4.3.2. Die Wirkprinzipien und die Lösungsansätze
In diesem Kapitel werden die unterschiedlichen Wirkprinzipien und die Lösungsansätze
für die Teilfunktionen und die Unterfunktionen aufgezeigt. Die Lösungsansätze werden
im Anschluss einer Bewertung unterzogen. Später werden die bewerteten
Lösungsansätze in einem Morphologischen Kasten eingetragen und die verschiedenen
Kombinationen aller Teilfunktionen betrachtet. Aus dieser Betrachtung wird die optimale
Gesamtlösung für die geforderte Gesamtfunktion des Proton – Emittanz – Monitors
ermittelt.
Da einige Teilfunktionen gleiche oder ähnliche Aufgaben beschreiben, werden bei der
Findung der Wirkprinzipien und der Lösungsansätze diese Funktionen gemeinsam
betrachtet. Dies trifft auf die Teilfunktionen 1 und 4, die Positionierung der Detektoren
und der Filter, sowie für die Teilfunktionen 2 und 5, die Steuerung der Positionierung der
Detektoren und der Filter, zu.
Die Ermittlung der Wirkprinzipien wird angewendet, um verschiedene Lösungsansätze
zu betrachten und zu vergleichen. Die Betrachtung der Problemstellung als abstrakte
Beschreibung und Darstellung ist zielorientiert. Technische Produkte können auf die
unterschiedlichsten Weisen realisiert werden. Durch die abstrakte Betrachtung der
Problemstellung wird sichergestellt, dass kein Wirkprinzip und auch keine
Lösungsmöglichkeit ohne vorherige Analyse verworfen wird [10].
Auf die Variationsmöglichkeiten, die sich auf die Ausführung, die Anordnung oder die
Herstellungsprozesse beziehen, wird hier aus praktischen Gründen nicht weiter
eingegangen.
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 55 -
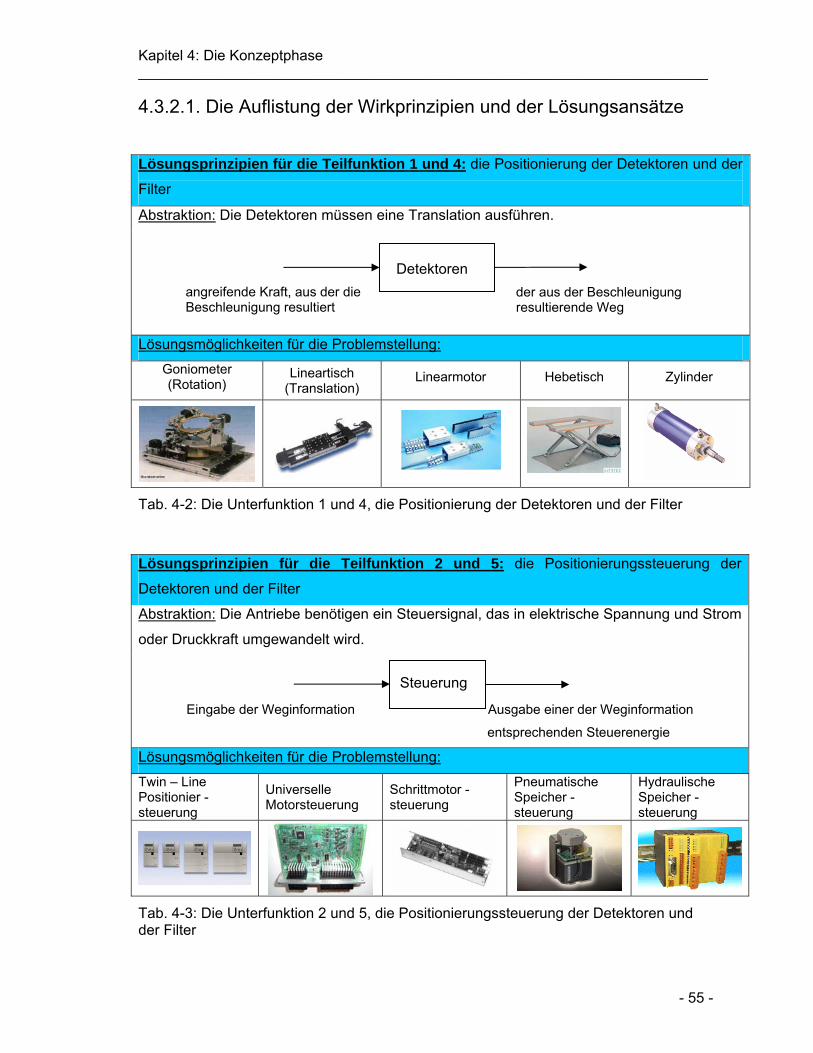
4.3.2.1. Die Auflistung der Wirkprinzipien und der Lösungsansätze Lösungsprinzipien für die Teilfunktion 1 und 4: die Positionierung der Detektoren und der
Filter
Abstraktion: Die Detektoren müssen eine Translation ausführen.
Lösungsmöglichkeiten für die Problemstellung:
Goniometer (Rotation)
Lineartisch (Translation)
Linearmotor Hebetisch Zylinder
Tab. 4-2: Die Unterfunktion 1 und 4, die Positionierung der Detektoren und der Filter
Lösungsprinzipien für die Teilfunktion 2 und 5: die Positionierungssteuerung der
Detektoren und der Filter Abstraktion: Die Antriebe benötigen ein Steuersignal, das in elektrische Spannung und Strom
oder Druckkraft umgewandelt wird.
Eingabe der Weginformation Ausgabe einer der Weginformation
entsprechenden Steuerenergie
Lösungsmöglichkeiten für die Problemstellung:
Twin – Line Positionier -steuerung
Universelle Motorsteuerung
Schrittmotor -steuerung
Pneumatische Speicher -steuerung
Hydraulische Speicher -steuerung
Tab. 4-3: Die Unterfunktion 2 und 5, die Positionierungssteuerung der Detektoren und der Filter
angreifende Kraft, aus der die Beschleunigung resultiert
Detektorender aus der Beschleunigung resultierende Weg
Steuerung
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 56 -
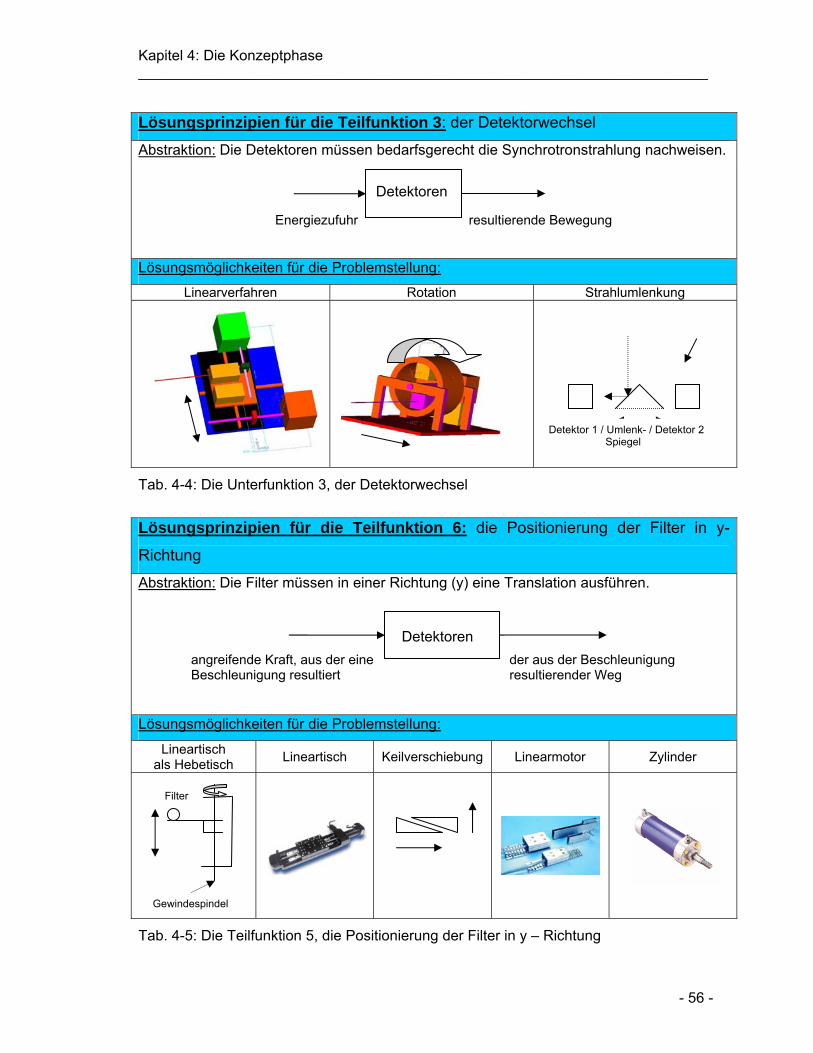
Lösungsprinzipien für die Teilfunktion 3: der Detektorwechsel
Abstraktion: Die Detektoren müssen bedarfsgerecht die Synchrotronstrahlung nachweisen.
Energiezufuhr resultierende Bewegung
Lösungsmöglichkeiten für die Problemstellung:
Linearverfahren Rotation Strahlumlenkung
Tab. 4-4: Die Unterfunktion 3, der Detektorwechsel
Lösungsprinzipien für die Teilfunktion 6: die Positionierung der Filter in y-
Richtung
Abstraktion: Die Filter müssen in einer Richtung (y) eine Translation ausführen.
Lösungsmöglichkeiten für die Problemstellung:
Lineartisch als Hebetisch Lineartisch Keilverschiebung Linearmotor Zylinder
Tab. 4-5: Die Teilfunktion 5, die Positionierung der Filter in y – Richtung
angreifende Kraft, aus der eine Beschleunigung resultiert
der aus der Beschleunigung resultierender Weg
Detektoren
Filter
Gewindespindel
Detektor 1 / Umlenk- / Detektor 2 Spiegel
Detektoren

Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 57 -
Lösungsprinzipien für die Unterfunktion 7.1: die Neutronenabschirmung
Abstraktion: Schutz der inneren Strukturen vor Neutronen – Untergrundstrahlung.
Lösungsmöglichkeiten für die Problemstellung:
Tetra - Boroxid Tetra - Borkarbid Polyäthylen Paraffin Wasser
Tab. 4-6: Die Unterfunktion 7.1, die Neutronenabschirmung
Lösungsprinzipien für die Unterfunktion 7.2: die Gammaabschirmung
Abstraktion: Schutz der inneren Strukturen vor Gamma – Untergrundstrahlung.
Lösungsmöglichkeiten für die Problemstellung:
Blei Beton Wasser Wolfram Eisen
Tab. 4-7: Die Unterfunktion 7.2, die Gammaabschirmung
energetisch gebremste Gammastrahlung
energetisch gebremste Neutronenstrahlung und Gammastrahlung
Neutronenstrahlung
Abschirmung
Gammastrahlung
Abschirmung
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 58 -
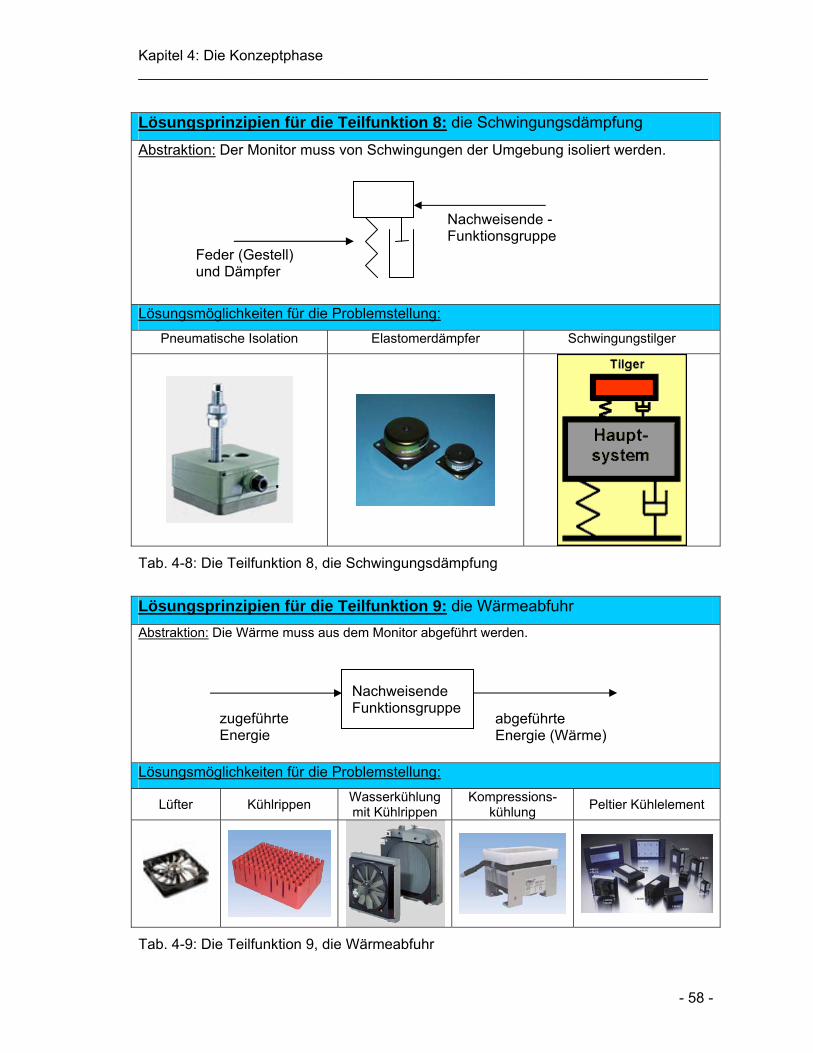
Lösungsprinzipien für die Teilfunktion 8: die Schwingungsdämpfung
Abstraktion: Der Monitor muss von Schwingungen der Umgebung isoliert werden.
Lösungsmöglichkeiten für die Problemstellung:
Pneumatische Isolation Elastomerdämpfer Schwingungstilger
Tab. 4-8: Die Teilfunktion 8, die Schwingungsdämpfung
Lösungsprinzipien für die Teilfunktion 9: die Wärmeabfuhr Abstraktion: Die Wärme muss aus dem Monitor abgeführt werden.
Lösungsmöglichkeiten für die Problemstellung:
Lüfter Kühlrippen Wasserkühlung mit Kühlrippen
Kompressions-kühlung Peltier Kühlelement
Tab. 4-9: Die Teilfunktion 9, die Wärmeabfuhr
Feder (Gestell) und Dämpfer
Nachweisende -Funktionsgruppe
Nachweisende Funktionsgruppe
zugeführte Energie
abgeführte Energie (Wärme)
Kapitel 4: Die Konzeptphase ______________________________________________________________________
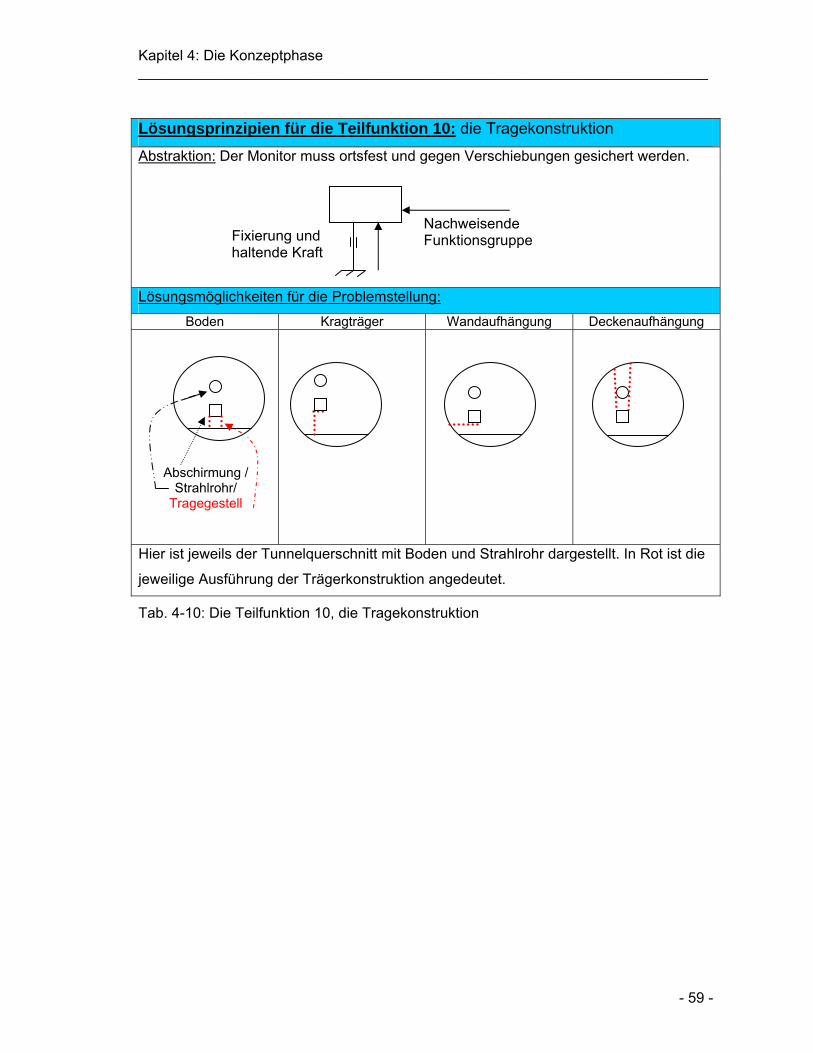
- 59 -
Lösungsprinzipien für die Teilfunktion 10: die Tragekonstruktion Abstraktion: Der Monitor muss ortsfest und gegen Verschiebungen gesichert werden.
Lösungsmöglichkeiten für die Problemstellung:
Boden Kragträger Wandaufhängung Deckenaufhängung
Hier ist jeweils der Tunnelquerschnitt mit Boden und Strahlrohr dargestellt. In Rot ist die
jeweilige Ausführung der Trägerkonstruktion angedeutet.
Tab. 4-10: Die Teilfunktion 10, die Tragekonstruktion
Abschirmung / Strahlrohr/
Tragegestell
Fixierung und haltende Kraft
Nachweisende Funktionsgruppe
Kapitel 4: Die Konzeptphase ______________________________________________________________________
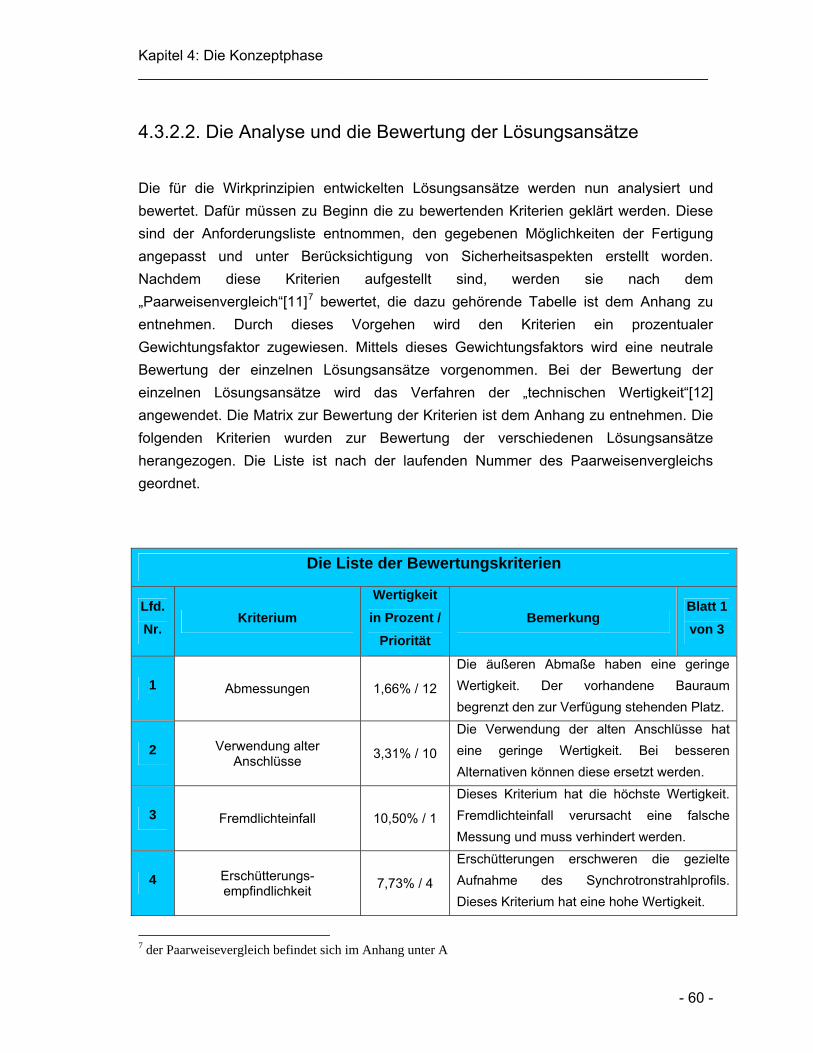
- 60 -
4.3.2.2. Die Analyse und die Bewertung der Lösungsansätze
Die für die Wirkprinzipien entwickelten Lösungsansätze werden nun analysiert und bewertet. Dafür müssen zu Beginn die zu bewertenden Kriterien geklärt werden. Diese sind der Anforderungsliste entnommen, den gegebenen Möglichkeiten der Fertigung angepasst und unter Berücksichtigung von Sicherheitsaspekten erstellt worden. Nachdem diese Kriterien aufgestellt sind, werden sie nach dem „Paarweisenvergleich“[11]7 bewertet, die dazu gehörende Tabelle ist dem Anhang zu entnehmen. Durch dieses Vorgehen wird den Kriterien ein prozentualer Gewichtungsfaktor zugewiesen. Mittels dieses Gewichtungsfaktors wird eine neutrale Bewertung der einzelnen Lösungsansätze vorgenommen. Bei der Bewertung der einzelnen Lösungsansätze wird das Verfahren der „technischen Wertigkeit“[12] angewendet. Die Matrix zur Bewertung der Kriterien ist dem Anhang zu entnehmen. Die folgenden Kriterien wurden zur Bewertung der verschiedenen Lösungsansätze herangezogen. Die Liste ist nach der laufenden Nummer des Paarweisenvergleichs geordnet.
Die Liste der Bewertungskriterien
Lfd. Nr.
Kriterium Wertigkeit in Prozent /
Priorität Bemerkung
Blatt 1 von 3
1 Abmessungen 1,66% / 12
Die äußeren Abmaße haben eine geringe Wertigkeit. Der vorhandene Bauraum begrenzt den zur Verfügung stehenden Platz.
2 Verwendung alter Anschlüsse 3,31% / 10
Die Verwendung der alten Anschlüsse hat eine geringe Wertigkeit. Bei besseren Alternativen können diese ersetzt werden.
3 Fremdlichteinfall 10,50% / 1
Dieses Kriterium hat die höchste Wertigkeit. Fremdlichteinfall verursacht eine falsche Messung und muss verhindert werden.
4 Erschütterungs-empfindlichkeit 7,73% / 4
Erschütterungen erschweren die gezielte Aufnahme des Synchrotronstrahlprofils. Dieses Kriterium hat eine hohe Wertigkeit.
7 der Paarweisevergleich befindet sich im Anhang unter A
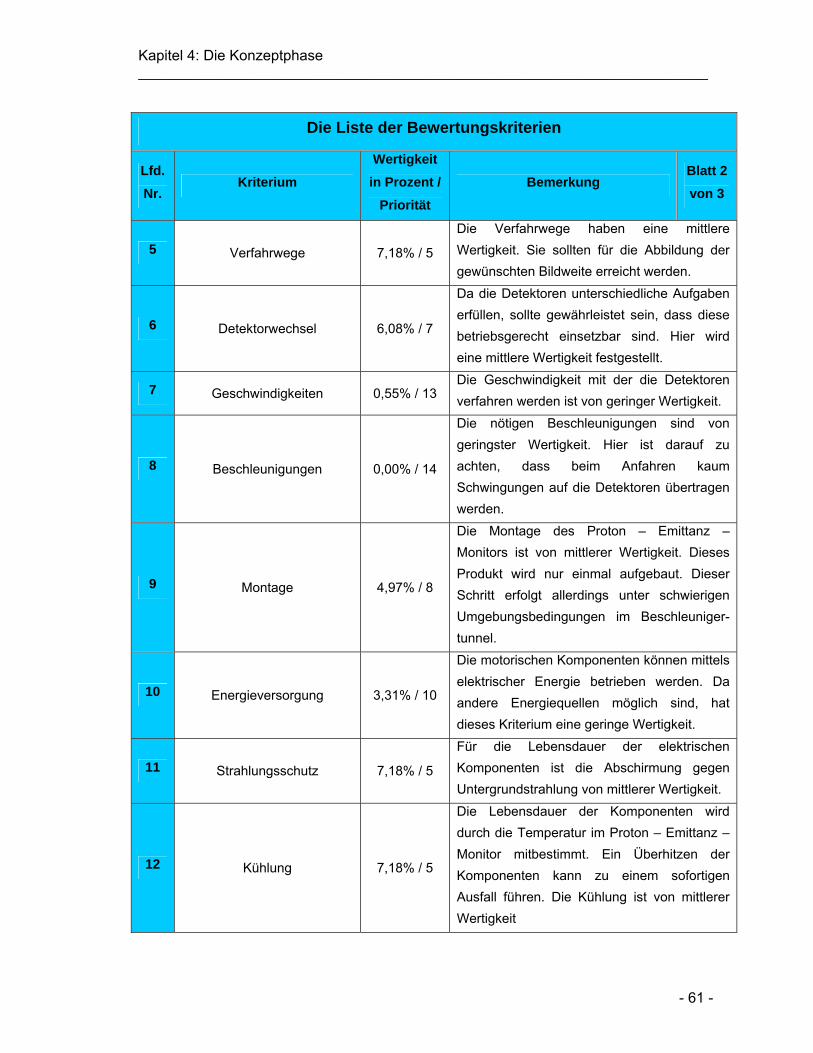
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 61 -
Die Liste der Bewertungskriterien
Lfd. Nr.
Kriterium Wertigkeit in Prozent /
Priorität Bemerkung
Blatt 2 von 3
5 Verfahrwege 7,18% / 5
Die Verfahrwege haben eine mittlere Wertigkeit. Sie sollten für die Abbildung der gewünschten Bildweite erreicht werden.
6 Detektorwechsel 6,08% / 7
Da die Detektoren unterschiedliche Aufgaben erfüllen, sollte gewährleistet sein, dass diese betriebsgerecht einsetzbar sind. Hier wird eine mittlere Wertigkeit festgestellt.
7 Geschwindigkeiten 0,55% / 13 Die Geschwindigkeit mit der die Detektoren verfahren werden ist von geringer Wertigkeit.
8 Beschleunigungen 0,00% / 14
Die nötigen Beschleunigungen sind von geringster Wertigkeit. Hier ist darauf zu achten, dass beim Anfahren kaum Schwingungen auf die Detektoren übertragen werden.
9 Montage 4,97% / 8
Die Montage des Proton – Emittanz – Monitors ist von mittlerer Wertigkeit. Dieses Produkt wird nur einmal aufgebaut. Dieser Schritt erfolgt allerdings unter schwierigen Umgebungsbedingungen im Beschleuniger-tunnel.
10 Energieversorgung 3,31% / 10
Die motorischen Komponenten können mittels elektrischer Energie betrieben werden. Da andere Energiequellen möglich sind, hat dieses Kriterium eine geringe Wertigkeit.
11 Strahlungsschutz 7,18% / 5
Für die Lebensdauer der elektrischen Komponenten ist die Abschirmung gegen Untergrundstrahlung von mittlerer Wertigkeit.
12 Kühlung 7,18% / 5
Die Lebensdauer der Komponenten wird durch die Temperatur im Proton – Emittanz – Monitor mitbestimmt. Ein Überhitzen der Komponenten kann zu einem sofortigen Ausfall führen. Die Kühlung ist von mittlerer Wertigkeit
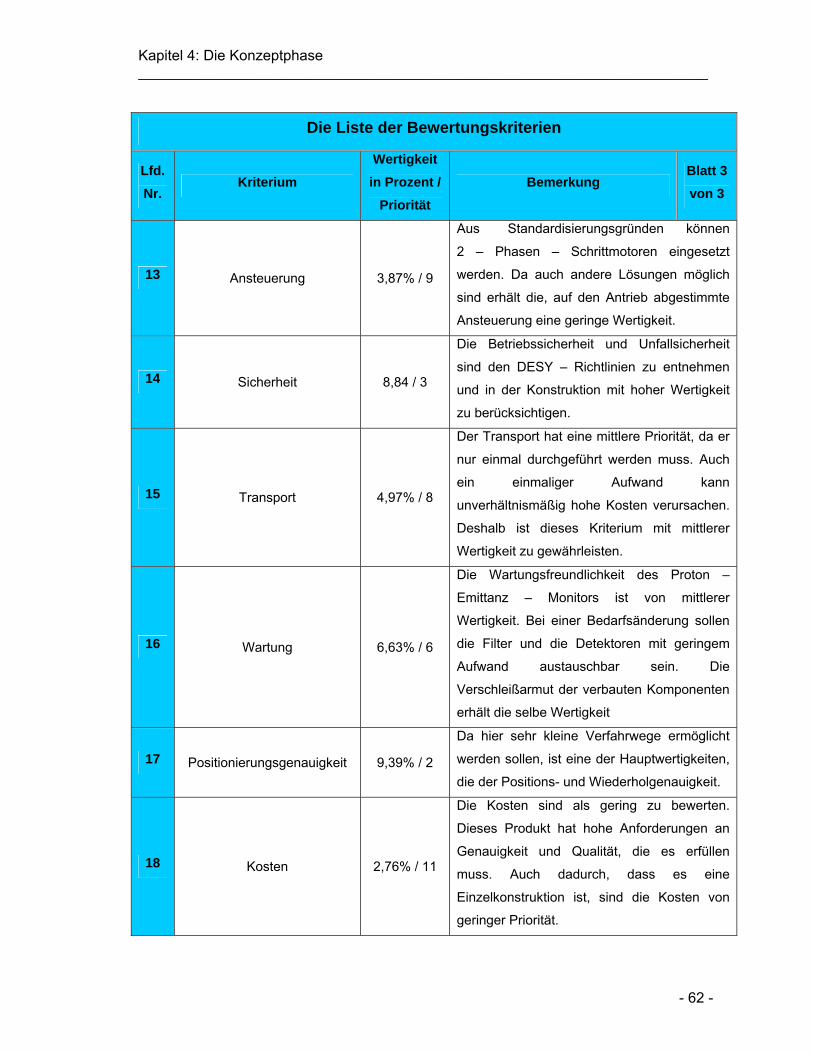
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 62 -
Die Liste der Bewertungskriterien
Lfd. Nr.
Kriterium Wertigkeit in Prozent /
Priorität Bemerkung
Blatt 3 von 3
13 Ansteuerung 3,87% / 9
Aus Standardisierungsgründen können
2 – Phasen – Schrittmotoren eingesetzt
werden. Da auch andere Lösungen möglich
sind erhält die, auf den Antrieb abgestimmte
Ansteuerung eine geringe Wertigkeit.
14 Sicherheit 8,84 / 3
Die Betriebssicherheit und Unfallsicherheit
sind den DESY – Richtlinien zu entnehmen
und in der Konstruktion mit hoher Wertigkeit
zu berücksichtigen.
15 Transport 4,97% / 8
Der Transport hat eine mittlere Priorität, da er
nur einmal durchgeführt werden muss. Auch
ein einmaliger Aufwand kann
unverhältnismäßig hohe Kosten verursachen.
Deshalb ist dieses Kriterium mit mittlerer
Wertigkeit zu gewährleisten.
16 Wartung 6,63% / 6
Die Wartungsfreundlichkeit des Proton –
Emittanz – Monitors ist von mittlerer
Wertigkeit. Bei einer Bedarfsänderung sollen
die Filter und die Detektoren mit geringem
Aufwand austauschbar sein. Die
Verschleißarmut der verbauten Komponenten
erhält die selbe Wertigkeit
17 Positionierungsgenauigkeit 9,39% / 2
Da hier sehr kleine Verfahrwege ermöglicht
werden sollen, ist eine der Hauptwertigkeiten,
die der Positions- und Wiederholgenauigkeit.
18 Kosten 2,76% / 11
Die Kosten sind als gering zu bewerten.
Dieses Produkt hat hohe Anforderungen an
Genauigkeit und Qualität, die es erfüllen
muss. Auch dadurch, dass es eine
Einzelkonstruktion ist, sind die Kosten von
geringer Priorität.
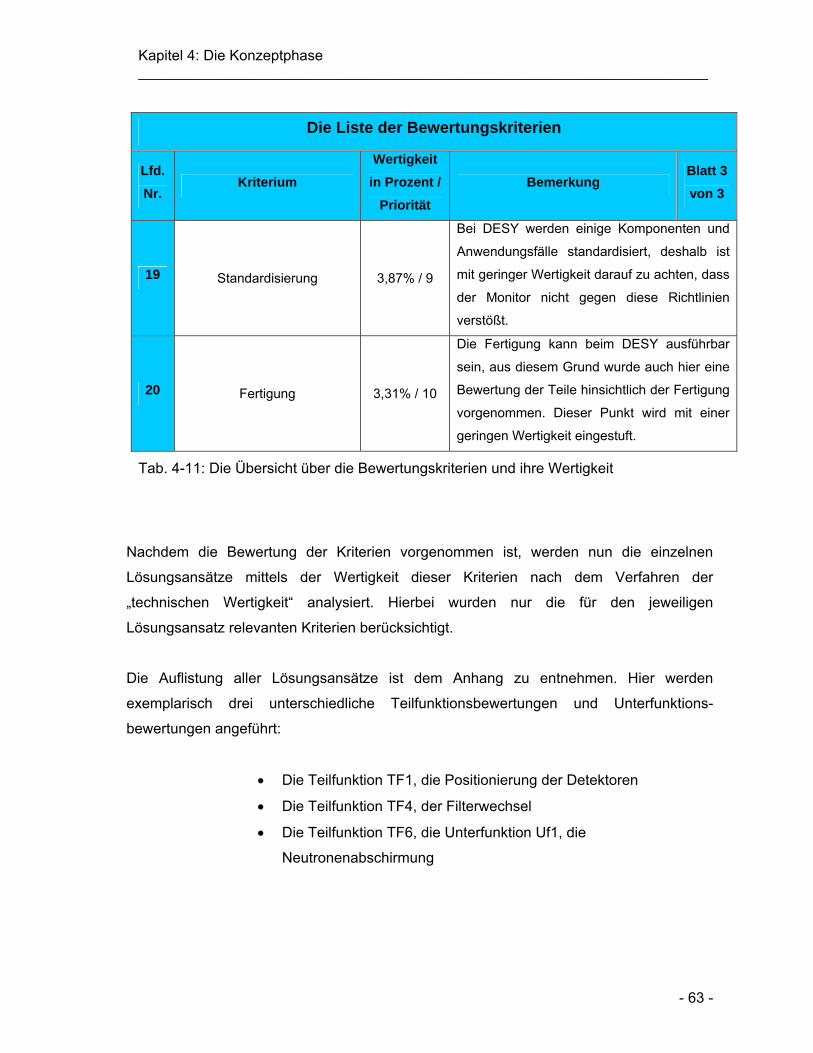
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 63 -
Die Liste der Bewertungskriterien
Lfd. Nr.
Kriterium Wertigkeit in Prozent /
Priorität Bemerkung
Blatt 3 von 3
19 Standardisierung 3,87% / 9
Bei DESY werden einige Komponenten und
Anwendungsfälle standardisiert, deshalb ist
mit geringer Wertigkeit darauf zu achten, dass
der Monitor nicht gegen diese Richtlinien
verstößt.
20 Fertigung 3,31% / 10
Die Fertigung kann beim DESY ausführbar
sein, aus diesem Grund wurde auch hier eine
Bewertung der Teile hinsichtlich der Fertigung
vorgenommen. Dieser Punkt wird mit einer
geringen Wertigkeit eingestuft.
Tab. 4-11: Die Übersicht über die Bewertungskriterien und ihre Wertigkeit
Nachdem die Bewertung der Kriterien vorgenommen ist, werden nun die einzelnen
Lösungsansätze mittels der Wertigkeit dieser Kriterien nach dem Verfahren der
„technischen Wertigkeit“ analysiert. Hierbei wurden nur die für den jeweiligen
Lösungsansatz relevanten Kriterien berücksichtigt.
Die Auflistung aller Lösungsansätze ist dem Anhang zu entnehmen. Hier werden
exemplarisch drei unterschiedliche Teilfunktionsbewertungen und Unterfunktions-
bewertungen angeführt:
• Die Teilfunktion TF1, die Positionierung der Detektoren
• Die Teilfunktion TF4, der Filterwechsel
• Die Teilfunktion TF6, die Unterfunktion Uf1, die
Neutronenabschirmung
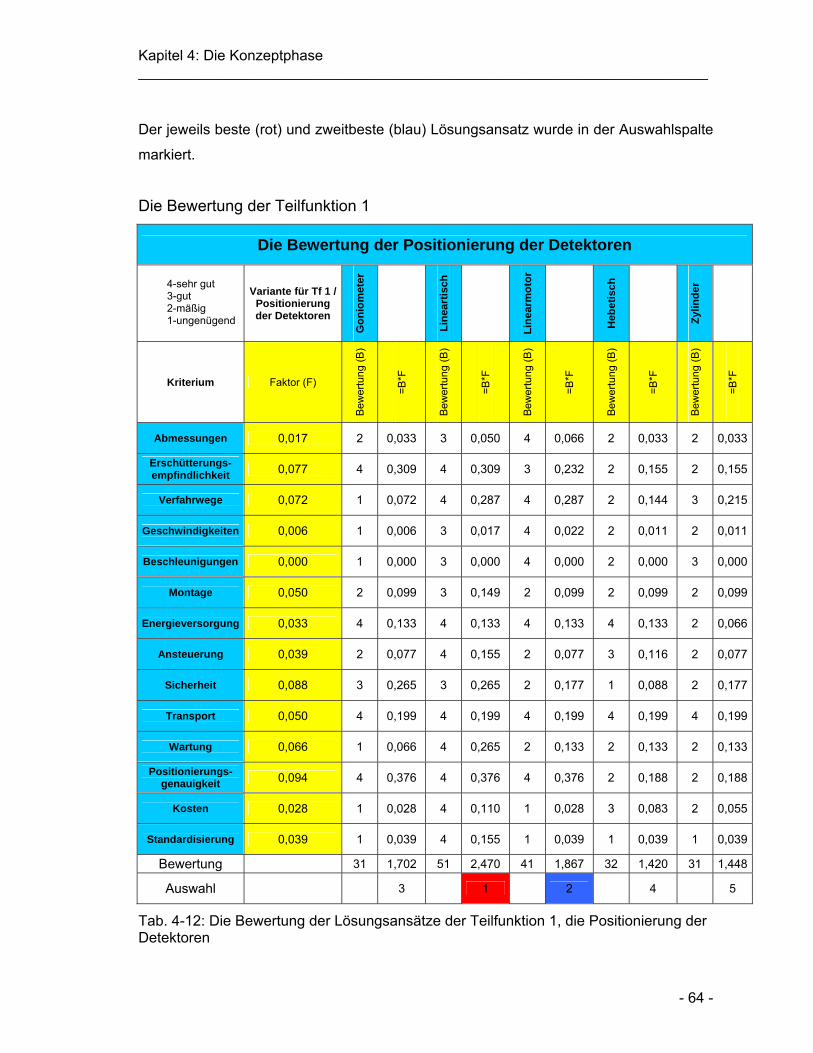
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 64 -
Der jeweils beste (rot) und zweitbeste (blau) Lösungsansatz wurde in der Auswahlspalte
markiert.
Die Bewertung der Teilfunktion 1
Die Bewertung der Positionierung der Detektoren
4-sehr gut 3-gut 2-mäßig 1-ungenügend
Variante für Tf 1 / Positionierung der Detektoren
Gon
iom
eter
Line
artis
ch
Line
arm
otor
Heb
etis
ch
Zylin
der
Kriterium Faktor (F)
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Abmessungen 0,017 2 0,033 3 0,050 4 0,066 2 0,033 2 0,033
Erschütterungs- empfindlichkeit 0,077 4 0,309 4 0,309 3 0,232 2 0,155 2 0,155
Verfahrwege 0,072 1 0,072 4 0,287 4 0,287 2 0,144 3 0,215
Geschwindigkeiten 0,006 1 0,006 3 0,017 4 0,022 2 0,011 2 0,011
Beschleunigungen 0,000 1 0,000 3 0,000 4 0,000 2 0,000 3 0,000
Montage 0,050 2 0,099 3 0,149 2 0,099 2 0,099 2 0,099
Energieversorgung 0,033 4 0,133 4 0,133 4 0,133 4 0,133 2 0,066
Ansteuerung 0,039 2 0,077 4 0,155 2 0,077 3 0,116 2 0,077
Sicherheit 0,088 3 0,265 3 0,265 2 0,177 1 0,088 2 0,177
Transport 0,050 4 0,199 4 0,199 4 0,199 4 0,199 4 0,199
Wartung 0,066 1 0,066 4 0,265 2 0,133 2 0,133 2 0,133
Positionierungs- genauigkeit 0,094 4 0,376 4 0,376 4 0,376 2 0,188 2 0,188
Kosten 0,028 1 0,028 4 0,110 1 0,028 3 0,083 2 0,055
Standardisierung 0,039 1 0,039 4 0,155 1 0,039 1 0,039 1 0,039
Bewertung 31 1,702 51 2,470 41 1,867 32 1,420 31 1,448
Auswahl 3 1 2 4 5
Tab. 4-12: Die Bewertung der Lösungsansätze der Teilfunktion 1, die Positionierung der Detektoren

Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 65 -
Die Bewertung der Teilfunktion 4
Die Bewertung des Filterwechsels
4-sehr gut 3-gut 2-mäßig 1-ungenügend
Variante für Tf 4 / Filterwechsel
Line
arve
rfah
ren
(Lin
eart
isch
)
Rot
atio
n (F
ilter
rad)
Stra
hlum
lenk
ung
Kriterium Faktor (F)
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Abmessungen 0,017 3 0,050 4 0,066 1 0,017
Erschütterungs- empfindlichkeit 0,077 3 0,232 3 0,232 1 0,077
Verfahrwege 0,072 3 0,215 4 0,287 2 0,144
Detektorwechsel 0,061 3 0,182 4 0,243 4 0,243
Geschwindigkeiten 0,006 2 0,011 1 0,006 4 0,022
Montage 0,050 3 0,149 4 0,199 1 0,050
Energieversorgung 0,033 4 0,133 4 0,133 4 0,133
Ansteuerung 0,039 4 0,155 4 0,155 2 0,077
Sicherheit 0,088 4 0,354 4 0,354 0 0,000
Transport 0,050 4 0,199 4 0,199 3 0,149
Wartung 0,066 4 0,265 4 0,265 1 0,066
Positionierungs- genauigkeit 0,094 4 0,376 4 0,376 2 0,188
Kosten 0,028 4 0,110 4 0,110 1 0,028
Standardisierung 0,039 4 0,155 4 0,155 1 0,039
Bewertung 51 2,586 55 2,779 31 1,232
Auswahl 2 1 3
Tab. 4-13: Die Bewertung der Lösungsansätze der Teilfunktion 4, der Filterwechsel
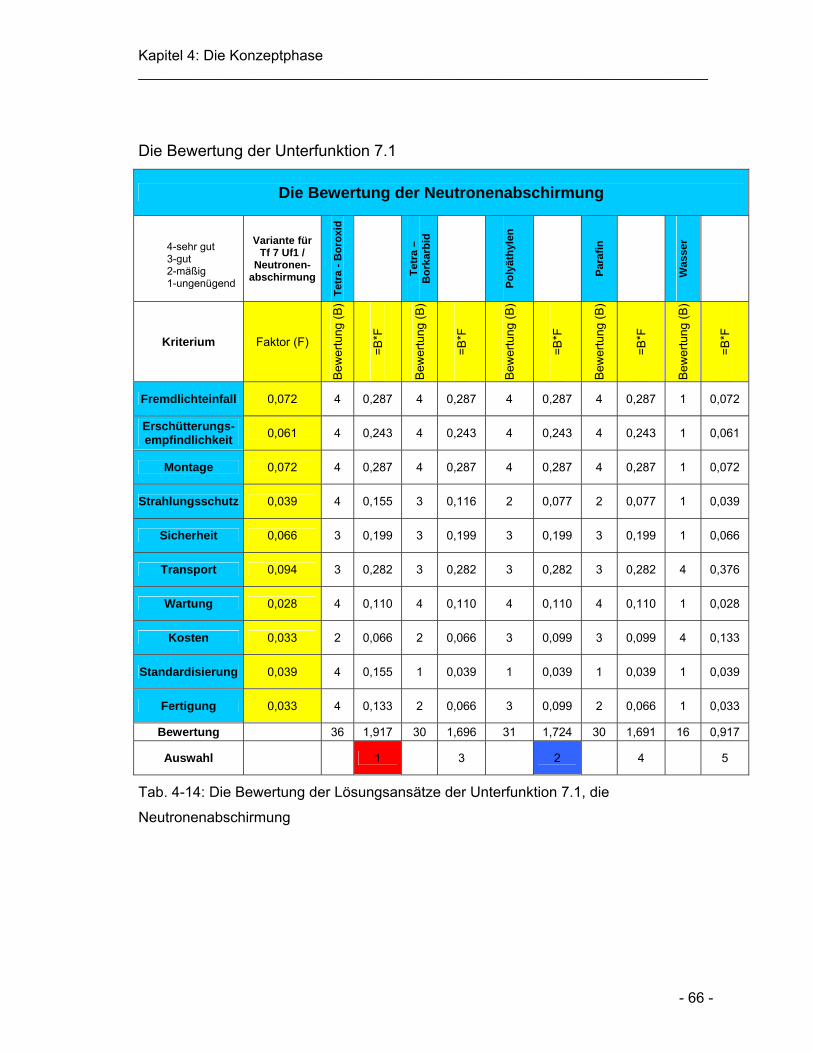
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 66 -
Die Bewertung der Unterfunktion 7.1
Die Bewertung der Neutronenabschirmung
4-sehr gut 3-gut 2-mäßig 1-ungenügend
Variante für Tf 7 Uf1 /
Neutronen- abschirmung
Tetr
a - B
orox
id
Tetr
a –
Bor
karb
id
Poly
äthy
len
Para
fin
Was
ser
Kriterium Faktor (F) B
ewer
tung
(B)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Fremdlichteinfall 0,072 4 0,287 4 0,287 4 0,287 4 0,287 1 0,072
Erschütterungs- empfindlichkeit 0,061 4 0,243 4 0,243 4 0,243 4 0,243 1 0,061
Montage 0,072 4 0,287 4 0,287 4 0,287 4 0,287 1 0,072
Strahlungsschutz 0,039 4 0,155 3 0,116 2 0,077 2 0,077 1 0,039
Sicherheit 0,066 3 0,199 3 0,199 3 0,199 3 0,199 1 0,066
Transport 0,094 3 0,282 3 0,282 3 0,282 3 0,282 4 0,376
Wartung 0,028 4 0,110 4 0,110 4 0,110 4 0,110 1 0,028
Kosten 0,033 2 0,066 2 0,066 3 0,099 3 0,099 4 0,133
Standardisierung 0,039 4 0,155 1 0,039 1 0,039 1 0,039 1 0,039
Fertigung 0,033 4 0,133 2 0,066 3 0,099 2 0,066 1 0,033
Bewertung 36 1,917 30 1,696 31 1,724 30 1,691 16 0,917
Auswahl 1 3 2 4 5
Tab. 4-14: Die Bewertung der Lösungsansätze der Unterfunktion 7.1, die
Neutronenabschirmung
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 67 -
4.3.3. Der Morphologische Kasten Die bewerteten Lösungsansätze der einzelnen Teilfunktionen und der Unterfunktionen
werden in den Morphologischen Kasten eingetragen. Dieser bietet nun die Möglichkeit,
durch Kombination der Lösungsansätze verschiedene Gesamtlösungen zu entwickeln.
Da die Kombinationsmöglichkeiten nahezu unbegrenzt sind, wurde hier durch die
vorhergehende Bewertung der Lösungsansätze bereits eine Orientierung geschaffen.
In dem Morphlogischen Kasten sind der jeweils beste Lösungsansatz (rot) und der
zweitbeste Lösungsansatz (blau) markiert. Die Kombinationen der besten und der
zeitbesten Lösungsansätze wurden durch gleichfarbige Pfeile miteinander verknüpft. Es
empfiehlt sich eine dieser Varianten oder Kombinationen daraus als Gesamtlösung
anzuwenden.
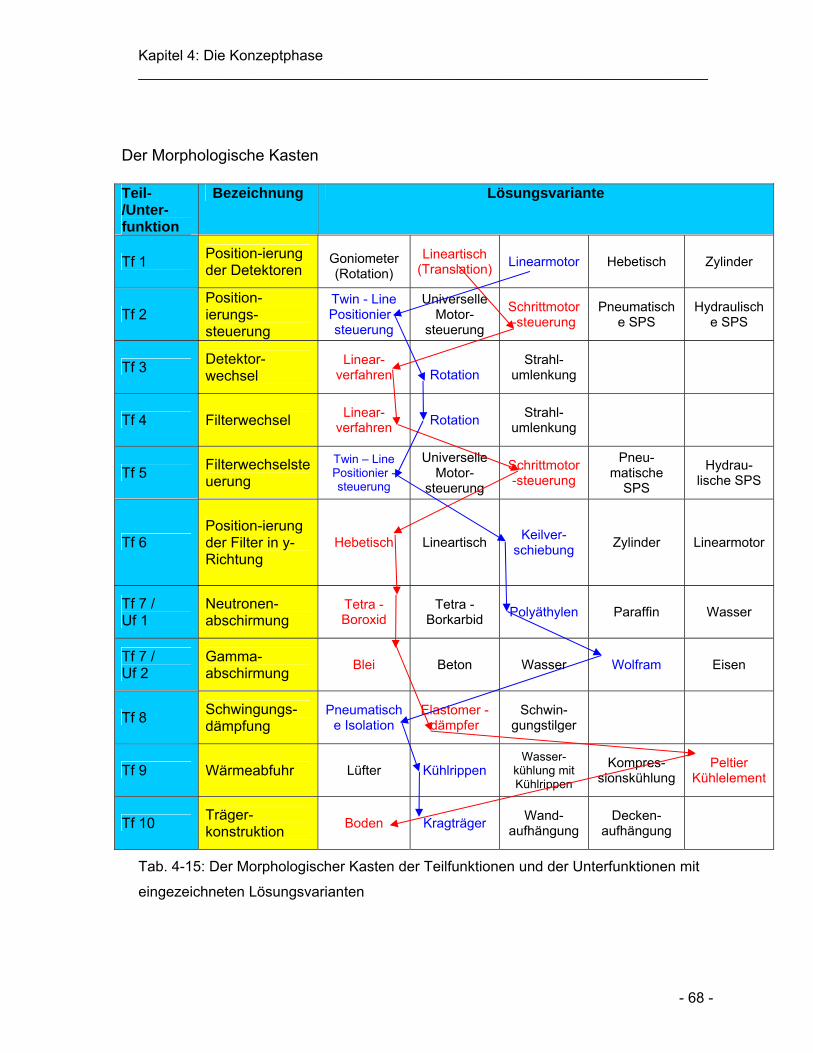
Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 68 -
Der Morphologische Kasten
Teil-/Unter-funktion
Bezeichnung Lösungsvariante
Tf 1 Position-ierung der Detektoren
Goniometer (Rotation)
Lineartisch (Translation) Linearmotor Hebetisch Zylinder
Tf 2 Position-ierungs-steuerung
Twin - Line Positionier -steuerung
Universelle Motor-
steuerung
Schrittmotor -steuerung
Pneumatische SPS
Hydraulische SPS
Tf 3 Detektor-wechsel
Linear-verfahren
Rotation
Strahl-umlenkung
Tf 4 Filterwechsel Linear-verfahren Rotation Strahl-
umlenkung
Tf 5 Filterwechselsteuerung
Twin – Line Positionier -steuerung
Universelle Motor-
steuerung
Schrittmotor -steuerung
Pneu-matische
SPS
Hydrau-lische SPS
Tf 6 Position-ierung der Filter in y-Richtung
Hebetisch Lineartisch Keilver-schiebung Zylinder Linearmotor
Tf 7 / Uf 1
Neutronen-abschirmung
Tetra - Boroxid
Tetra - Borkarbid Polyäthylen Paraffin Wasser
Tf 7 / Uf 2
Gamma-abschirmung Blei Beton Wasser Wolfram Eisen
Tf 8 Schwingungs-dämpfung
Pneumatische Isolation
Elastomer -dämpfer
Schwin-gungstilger
Tf 9 Wärmeabfuhr Lüfter Kühlrippen Wasser-
kühlung mit Kühlrippen
Kompres-sionskühlung
Peltier Kühlelement
Tf 10 Träger-konstruktion Boden Kragträger Wand-
aufhängung Decken-
aufhängung
Tab. 4-15: Der Morphologischer Kasten der Teilfunktionen und der Unterfunktionen mit
eingezeichneten Lösungsvarianten

Kapitel 4: Die Konzeptphase ______________________________________________________________________
- 69 -
4.3.4. Die Festlegung der Variante
Die Festlegung der technisch optimalen Variante ist der abschließende Meilenstein der
Konzeptphase. Nachdem die optimale Variante aus den Lösungsansätzen mit Hilfe des
Morphologischen Kastens bestimmt wurde, sollten keine Veränderungen in das Konzept
eingebracht werden. Die VDI - Richtlinie 2221 beschreibt ein iteratives Vorgehen, doch
würde ein Rücksprung in die Konzeptphase einen erheblichen zeitlichen Mehraufwand
bedeuten. Dies sollte nur nach der Feststellung gravierender
Verbesserungsmöglichkeiten oder Mängel geschehen. Da nach Rücksprache mit den
Projektverantwortlichen keine gravierenden Mängel oder Verbesserungsvorschläge
entstanden sind, wird hier auf einen Rücksprung verzichtet.
Anhand der bewerteten Lösungsansätze und des Morphologischen Kastens wurde
festgestellt, dass die Kombination der Lineartische mit einer Schrittmotorsteuerung die
technisch optimale Möglichkeit ist, die Detektoren linear zu verstellen und zu wechseln.
Das gleiche gilt für die Filter, hier wurde eine käufliche Lösung ermittelt, die auf einem
Rotationsprinzip basiert. Da dieser Lösungsansatz räumliche Vorteile bei der Anordnung
der Komponenten aufweist, wird hier von dem am besten bewerteten Lösungsansatz
abgewichen. Die am besten geeignete Materialkombination für die Strahlenabschirmung
ist eine Kombination bestehend aus Tetra – Boroxid und Blei. Die Schwingungen lassen
sich optimal mittels eines Elastomerdämpfer dämpfen. Als technisch optimales Element
zur Abfuhr der Betriebswärme wird der Einsatz von Peltier – Kühlelementen festgestellt.
Eine am Boden zu befestigende Tragekonstruktion für die Nachweisende
Funktionsgruppe ist die technisch beste Realisierung, um die Funktionsgruppe ortsfest
zu fixieren.
Für diese Kombination der Lösungsansätze werden nun Komponenten ermittelt, die die
gestellten Anforderungen bezüglich der Genauigkeit, der geometrischen Ausdehnung
und der Funktion erfüllen. Dazu werden für die jeweiligen Komponenten unverbindliche
Angebote von verschiedenen Herstellern eingeholt. Nach Vergleich der Angebote
werden unter Berücksichtigung des Preis-/ Leistungsverhältnisses die Komponenten
bestellt. Die Funktion der zum Einsatz kommenden Komponenten wird im nächsten
Kapitel beschrieben.
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 70 -
5. Die Funktionsbeschreibung
Dieses Kapitel beschreibt die Funktionsweise der Komponenten, die während der
Konzeptphase als technisch optimaler Lösungsansatz ermittelt wurden. Die Methoden
der Herstellerermittlung und der optimalen Produktvariante sind vom Prinzip in jedem
Unternehmen gleich. Aus diesem Grund wird hier nicht weiter darauf eingegangen.
Weiterhin wird zum Abschluss dieses Kapitels die erzielte Gesamtfunktion genauer
beschrieben. Die Kenntnis der Produktvariante und die daraus resultierenden
Anschlussmaße und Abmessungen, sind insbesondere für die Konstruktion von großem
Interesse. Für die konstruktive Gestaltung der Nachweisenden Funktionsgruppe werden
die äußeren Abmessungen und andere spezifische Angaben, wie zum Beispiel die
erforderlichen elektrischen Anschlüsse, Befestigungspunkte und mögliche Einbaulagen,
sowie die Abmaße der Verbindungselemente benötigt.
5.1. Die Funktionsbeschreibung der verwendeten Komponenten
Das Kapitel über die verwendeten Komponenten soll einen Ausblick über die
Funktionsweise und den Aufbau der einzelnen Komponenten und den genutzten
physikalischen Effekten geben.
5.1.1. Die Lineartische
Für die Lineartische gibt es eine Vielzahl von verschiedenen Anbietern, deren Produkte
sich in ihrem Leistungsumfang und Preisniveau stark unterscheiden. Bei der Auswahl
der Lineartische wurden zum Beispiel Produkte von den Herstellern „OWIS“, „Feinmess
Dresden“ und „Micos“ verglichen. Nach Auswertung der Produktinformationen und der
Preise wurden die Lineartische der Serie LTM 80 (Abb. 5-1) von dem Hersteller „Owis“
ausgewählt. Für die unterschiedlichen Verfahrwege sind drei verschiedene Lineartische
dieser Serie bestellt worden, weil diese das Kosten / Leistungsoptimum darstellen.
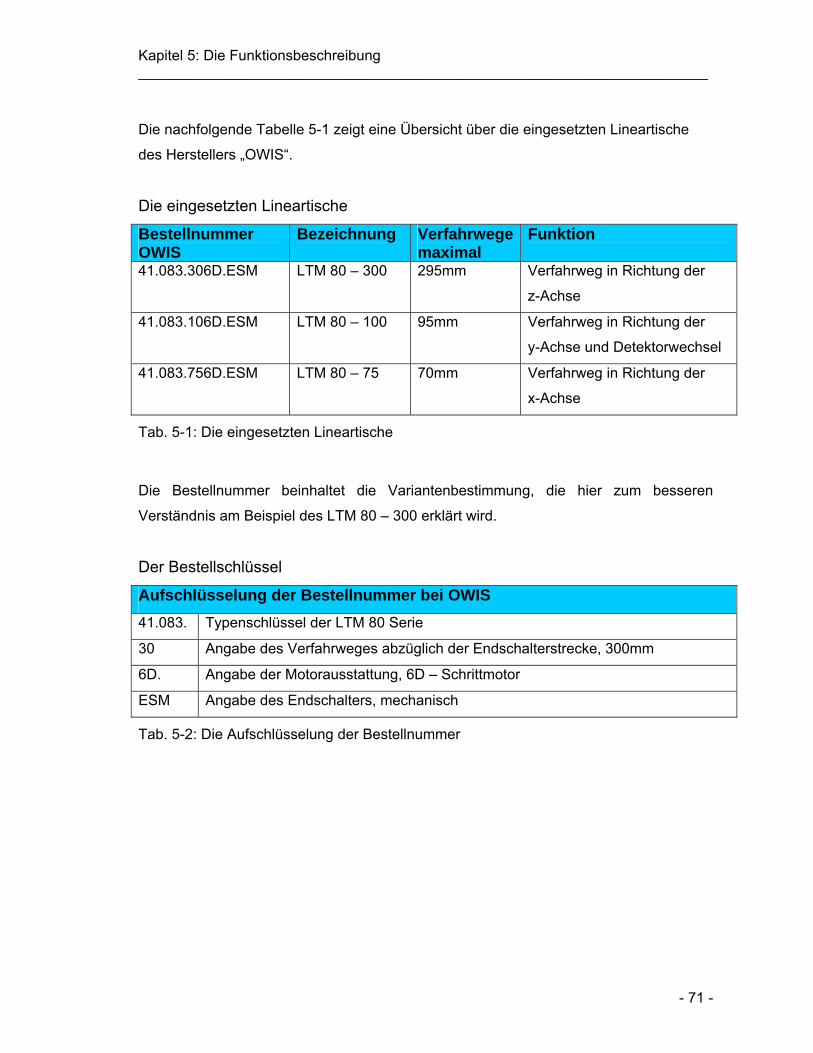
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 71 -
Die nachfolgende Tabelle 5-1 zeigt eine Übersicht über die eingesetzten Lineartische
des Herstellers „OWIS“.
Die eingesetzten Lineartische
Bestellnummer OWIS
Bezeichnung Verfahrwege maximal
Funktion
41.083.306D.ESM LTM 80 – 300 295mm Verfahrweg in Richtung der
z-Achse
41.083.106D.ESM LTM 80 – 100 95mm Verfahrweg in Richtung der
y-Achse und Detektorwechsel
41.083.756D.ESM LTM 80 – 75 70mm Verfahrweg in Richtung der
x-Achse
Tab. 5-1: Die eingesetzten Lineartische
Die Bestellnummer beinhaltet die Variantenbestimmung, die hier zum besseren
Verständnis am Beispiel des LTM 80 – 300 erklärt wird.
Der Bestellschlüssel
Aufschlüsselung der Bestellnummer bei OWIS 41.083. Typenschlüssel der LTM 80 Serie
30 Angabe des Verfahrweges abzüglich der Endschalterstrecke, 300mm
6D. Angabe der Motorausstattung, 6D – Schrittmotor
ESM Angabe des Endschalters, mechanisch
Tab. 5-2: Die Aufschlüsselung der Bestellnummer

Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 72 -
Der Lineartisch
Abb. 5-1: Die Darstellung eines der eingesetzten Lineartische von OWIS der LTM 80
Serie
Bei den Lineartischen wurden aus Gründen der Steuerungsstandardisierung,
2 – Phasen – Schrittmotoren eingesetzt. Als Endlagenschalter zur Begrenzung der
Verfahrstrecke werden hier mechanische Endlagenschalter verwendet. Die vom
Hersteller außerdem angebotenen Hallsensoren gelten unter den gegebenen
Einsatzbedingungen als problematisch. Weitere Angaben zu den Lineartischen, wie zum
Beispiel die Positionierungsgenauigkeit und der Wiederholungsfehler, sind dem im
Anhang beigefügten Datenblatt zu entnehmen. Im folgenden Kapitel werden kurz die
Schrittmotoren von „Nanotec“ genauer erläutert.
5.1.1.1. Die Schrittmotoren
Die in den Lineartischen zum Einsatz kommenden 2 – Phasen – Schrittmotoren werden
von dem Hersteller „Nanotec“ geliefert. Es werden die so genannten „High Torque“
Motoren eingesetzt. Diese Motoren gehören zu der Gruppe der Hybrid – Schrittmotoren,
charakteristisch weisen diese ein sehr hohes Drehmoment auf. Hybrid – Schrittmotoren
gehören zu der Klasse der permanentmagnetisch erregten Schrittmotoren. Obwohl
diese am oberen Ende der Preisskala angesiedelt sind, werden sie wegen der genauen
Positionierung und des hohen Drehmomentes für spezielle Aufgaben, wie zum Beispiel
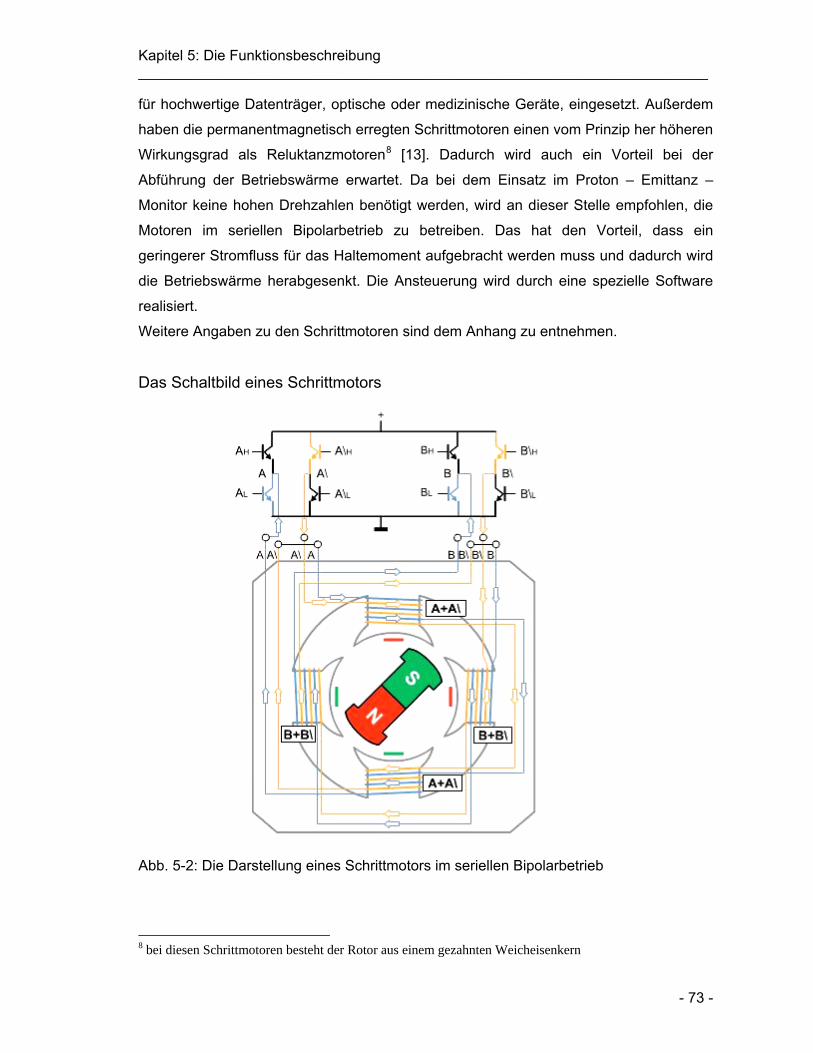
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 73 -
für hochwertige Datenträger, optische oder medizinische Geräte, eingesetzt. Außerdem
haben die permanentmagnetisch erregten Schrittmotoren einen vom Prinzip her höheren
Wirkungsgrad als Reluktanzmotoren8 [13]. Dadurch wird auch ein Vorteil bei der
Abführung der Betriebswärme erwartet. Da bei dem Einsatz im Proton – Emittanz –
Monitor keine hohen Drehzahlen benötigt werden, wird an dieser Stelle empfohlen, die
Motoren im seriellen Bipolarbetrieb zu betreiben. Das hat den Vorteil, dass ein
geringerer Stromfluss für das Haltemoment aufgebracht werden muss und dadurch wird
die Betriebswärme herabgesenkt. Die Ansteuerung wird durch eine spezielle Software
realisiert.
Weitere Angaben zu den Schrittmotoren sind dem Anhang zu entnehmen.
Das Schaltbild eines Schrittmotors
Abb. 5-2: Die Darstellung eines Schrittmotors im seriellen Bipolarbetrieb
8 bei diesen Schrittmotoren besteht der Rotor aus einem gezahnten Weicheisenkern
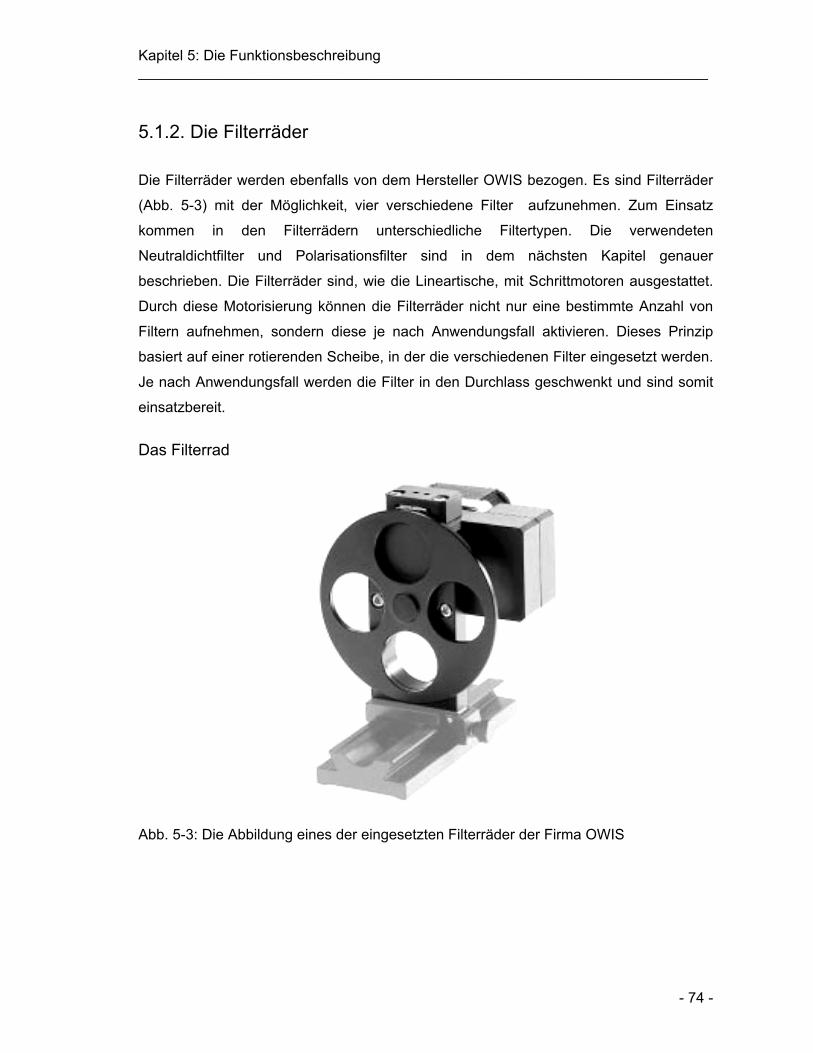
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 74 -
5.1.2. Die Filterräder
Die Filterräder werden ebenfalls von dem Hersteller OWIS bezogen. Es sind Filterräder
(Abb. 5-3) mit der Möglichkeit, vier verschiedene Filter aufzunehmen. Zum Einsatz
kommen in den Filterrädern unterschiedliche Filtertypen. Die verwendeten
Neutraldichtfilter und Polarisationsfilter sind in dem nächsten Kapitel genauer
beschrieben. Die Filterräder sind, wie die Lineartische, mit Schrittmotoren ausgestattet.
Durch diese Motorisierung können die Filterräder nicht nur eine bestimmte Anzahl von
Filtern aufnehmen, sondern diese je nach Anwendungsfall aktivieren. Dieses Prinzip
basiert auf einer rotierenden Scheibe, in der die verschiedenen Filter eingesetzt werden.
Je nach Anwendungsfall werden die Filter in den Durchlass geschwenkt und sind somit
einsatzbereit.
Das Filterrad
Abb. 5-3: Die Abbildung eines der eingesetzten Filterräder der Firma OWIS
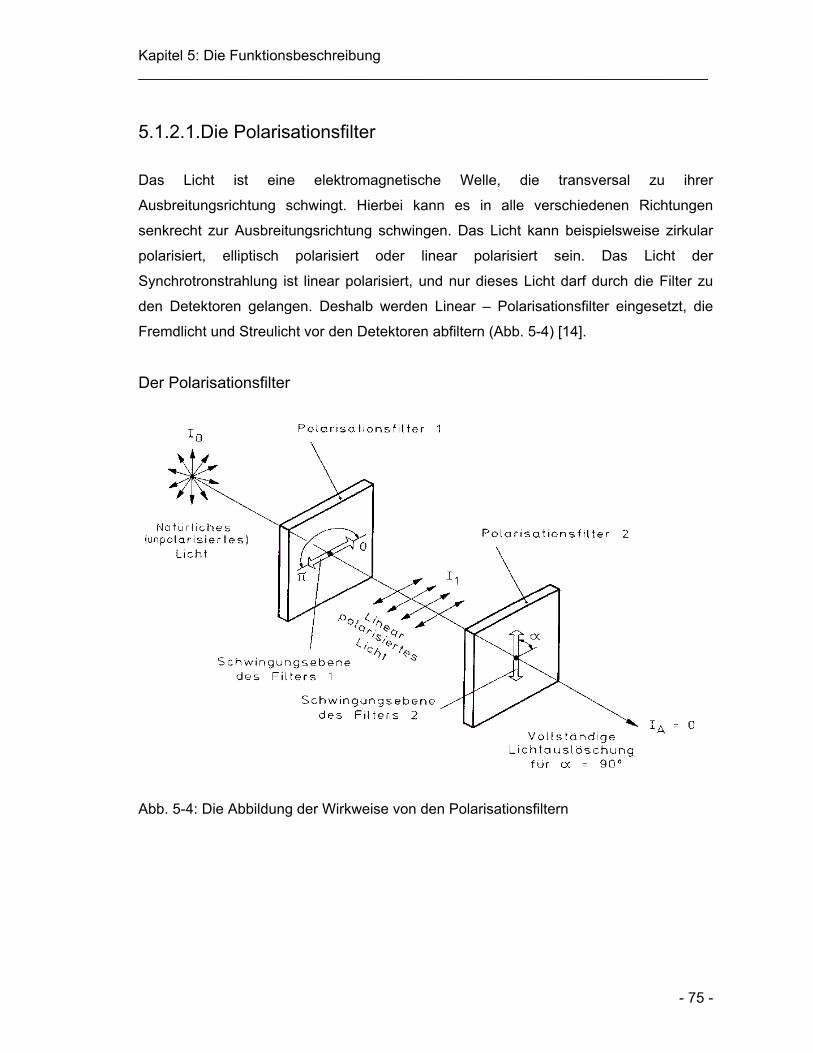
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 75 -
5.1.2.1.Die Polarisationsfilter
Das Licht ist eine elektromagnetische Welle, die transversal zu ihrer
Ausbreitungsrichtung schwingt. Hierbei kann es in alle verschiedenen Richtungen
senkrecht zur Ausbreitungsrichtung schwingen. Das Licht kann beispielsweise zirkular
polarisiert, elliptisch polarisiert oder linear polarisiert sein. Das Licht der
Synchrotronstrahlung ist linear polarisiert, und nur dieses Licht darf durch die Filter zu
den Detektoren gelangen. Deshalb werden Linear – Polarisationsfilter eingesetzt, die
Fremdlicht und Streulicht vor den Detektoren abfiltern (Abb. 5-4) [14].
Der Polarisationsfilter
Abb. 5-4: Die Abbildung der Wirkweise von den Polarisationsfiltern
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 76 -
5.1.2.2. Die Neutraldichtfilter Die Synchrotronstrahlung ist ein intensives und stark gebündeltes Licht. Durch eine zu hohe Intensität können die Detektoren überlastet werden. Deshalb werden Neutraldichtfilter vorgeschaltet. Diese sind neutralgrau eingefärbt, dadurch wird die durchtretende Lichtmenge vermindert. Somit ist gewährleistet, dass die einfallende Synchrotronstrahlung nur in der Intensität herabgesetzt wird und die Detektoren vor Überlastung geschützt sind.
5.1.3. Die CAN Bus – Steuerung Der CAN Bus (Controller Area Network / Binary Unit System) ist ein asynchroner, serieller Standard Feldbus (ISO 11898), der in vielen Bereichen eingesetzt wird. Der CAN-Bus arbeitet nach dem CSMA- (Carrier Sense Multiple Access) Verfahren. Zur fortlaufenden Synchronisierung der Busteilnehmer wird ein Bit - Stuffing verwendet. In diesem Anwendungsfall wird der Bus mit Kupferleitungen ausgeführt. Beim Einsatz von Kupferleitungen arbeitet der CAN-Bus mit Differenzsignalen. Er wird normalerweise mit 3 Leitungen ausgeführt: CAN_HIGH, CAN_LOW und CAN_GND. CAN_LOW enthält den komplementären Pegel von CAN_HIGH gegen Masse. Dadurch können Gleichtaktstörungen unterdrückt werden, da ja die Differenz gleich bleibt. Besonders interessant ist dieses System, weil es große Leitungslängen zulässt und über ein sehr gutes Fehlerverhalten verfügt. In dem CAN Bus Netz kann jede Komponente Bit – Fehler erkennen und diese als Meldung an alle anderen Komponenten senden. Kommt es zu einer Häufung „falscher Fehlermeldungen“, zum Beispiel weil ein Modul defekt ist, werden die Sendeberechtigungen des Moduls eingeschränkt, dies kann bis zu einem „bus off“ führen. In diesem Zustand hat das Modul keine Sendeberechtigung mehr [15]. Diese beiden beschriebenen Eigenschaften sind besonders in dem geplanten Einsatzgebiet wichtig, da die Signale über weite Strecken mit vielen möglichen Störquellen gesendet werden müssen. Die hohe Übertragungsrate, die der Bus zur Verfügung stellt, ist für den Einsatz nicht ausschlaggebend, da hier nur die fünf Endstufen zur Schrittmotorsteuerung angesprochen werden. Dennoch ist dieser Bus günstiger und auf Grund seiner hohen Störungssicherheit besser geeignet als andere Bussysteme.
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 77 -
5.1.4. Die Endstufen zur Schrittmotorsteuerung Für die Schrittmotoren werden zur Signalverarbeitung und zur Spannungsversorgung
Endstufen eingesetzt. Diese werden über den entsprechenden Bus angesteuert und
wandeln die Steuerungsbefehle in definierte Schrittfrequenzen und Ströme um. Die
Endstufen versorgen die Schrittmotoren mit Spannung in der definierten Schrittfrequenz.
Hier kommen die Endstufen „CAN – Stepcon 1H“ des Herstellers „esd“ zum Einsatz.
Diese Endstufen haben sich durch ihren Leistungsumfang, ihre Preisgestaltung und die
unkomplizierte und robuste Ansteuerung über die CAN – Bus – Schnittstelle bewährt.
Aus diesen Gründen werden diese Endstufen bei DESY bevorzugt verwendet. In
Abbildung 5-5 ist eine der Endstufen abgebildet. Das Schaltbild einer Schrittmotoren –
Endstufe mit den entsprechenden Anschlüssen der Signale und Energie ist in der
Abbildung 5-6 dargestellt. Das vollständige Datenblatt und die Bedienungsanleitung sind
dem Anhang beigefügt.
Die Schrittmotoren Endstufe
Abb. 5-5: Die Abbildung einer eingesetzten Endstufe des Hersteller esd
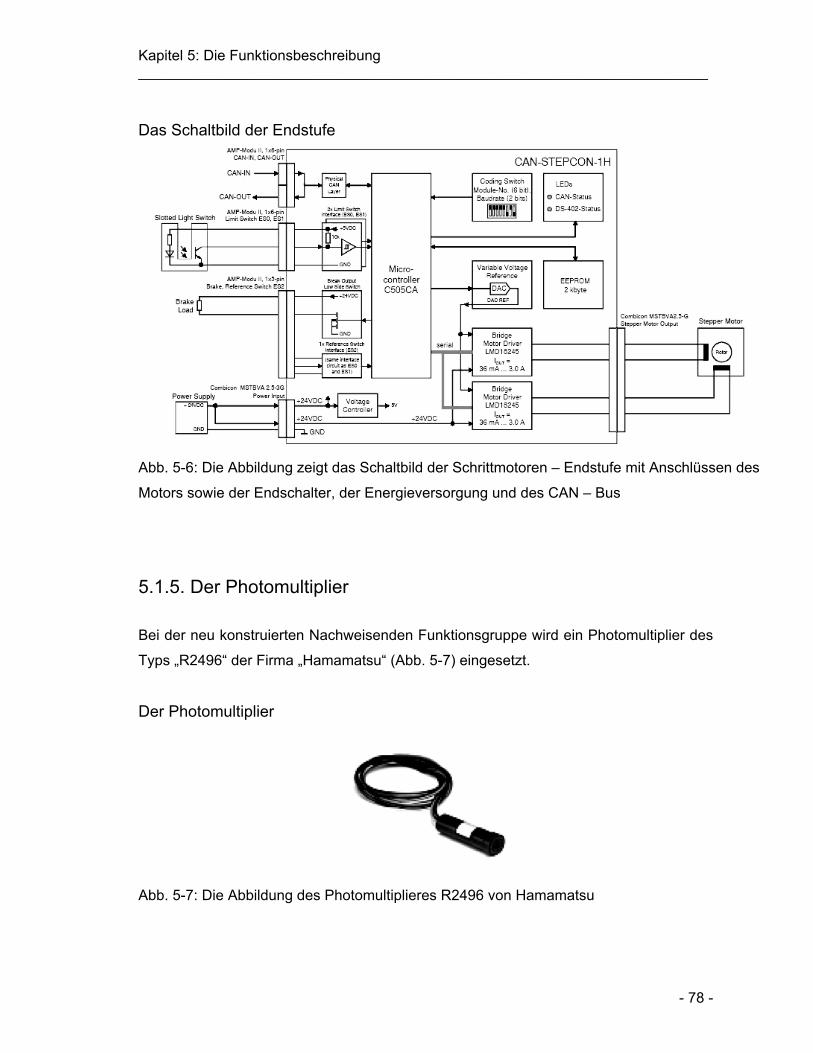
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 78 -
Das Schaltbild der Endstufe
Abb. 5-6: Die Abbildung zeigt das Schaltbild der Schrittmotoren – Endstufe mit Anschlüssen des
Motors sowie der Endschalter, der Energieversorgung und des CAN – Bus
5.1.5. Der Photomultiplier
Bei der neu konstruierten Nachweisenden Funktionsgruppe wird ein Photomultiplier des
Typs „R2496“ der Firma „Hamamatsu“ (Abb. 5-7) eingesetzt.
Der Photomultiplier
Abb. 5-7: Die Abbildung des Photomultiplieres R2496 von Hamamatsu
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 79 -
Photomultiplier sind spezielle Elektronenröhren, die dazu dienen, schwache Lichtsignale zu verstärken. An dem Messausgang wird ein Oszilloskop angeschlossen auf dem das Signal betrachtet wird. Durch die Funktionsweise ist es mit einem Photomultiplier möglich, einzelne Lichtteilchen (Photonen) nachzuweisen. Die Photonen treffen auf die Photokathodenschicht und schießen so Elektronen aus deren Oberfläche (Abb. 5-8).
Das Prinzip des Photomultipliers
Abb. 5-8: Die Prinzipskizze eines Photomultipliers
Die freigesetzten Photoelektronen werden in einem elektrischen Feld beschleunigt und treffen auf weitere Elektroden (sog. Dynoden), aus deren Oberfläche jedes auftreffende Elektron mehrere Sekundärelektronen herausschlägt. Somit nimmt die Anzahl der Elektronen von Dynode zu Dynode kaskadenartig zu. Damit dieses Prinzip funktioniert, müssen die Dynoden auf zunehmend (im Bild von links nach rechts) positivem Potential liegen. Meist wird dieses realisiert, indem die ursprüngliche Hochspannung über eine Spannungsteilerkette heruntergeteilt wird. Zum Schluss treffen die Elektronen auf eine Anode und fließen zur Masse ab. Dabei erzeugen sie einen Spannungsabfall über dem eingezeichneten Widerstand. Dieses Signal wird ausgekoppelt. Der Verstärkungsfaktor wächst exponentiell mit der Anzahl der Dynoden. Typische Multiplier haben ca. 10 Dynoden. Werden an jeder Dynode 5 Elektronen pro auftreffendem Elektron ausgeschlagen, so erhält man eine Verstärkung der Elektronenzahl, also des Stroms, um einen Faktor 510 ~ 107. Die Anzahl der erzeugten Sekundärelektronen ist proportional zur Anzahl der eingestrahlten Photonen. Darum ist auch die Höhe des ausgegebenen Spannungspulses proportional zur eingestrahlten Photonenzahl, somit auch zu der Intensität des Lichtes [16].
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 80 -
5.1.6. Die Kamera In dem bisher eingesetzten Monitor ist eine Digitalkamera mit einem empfindlichen Lichtsensor eingebaut. Diese wird in der neu konstruierten Nachweisenden Funktionsgruppe nicht wieder zum Einsatz kommen. Die bisherige Kamera wird durch eine Kamera vom Typ JAI-M 300 (Abb. 5-9) ersetzt. Diese Kamera hat einen lichtempfindlichen CCD – Sensor mit einer Empfindlichkeit von 0.05 Lux. Es ist eine monochrome Kamera ausgewählt worden. Eine farbliche Auflösung der Synchrotronstrahlung ist nicht nötig, da hier die Intensitätsverteilung im transversalen Strahlprofil betrachtet werden soll. Dieses wird bisher mit einer monochromen Kamera erfolgreich umgesetzt. Mit der verwendeten Kamera wird der Synchrotronstrahlfleck aufgenommen. Die Auswertung erfolgt nach einem speziellen Verfahren. Es werden die Helligkeitsinformationen der einzelnen Pixel ausgewertet. Die Helligkeit der aufgenommenen Synchrotronstrahlung lässt auf diese Weise einen Rückschluss auf die Intensitätsverteilung der Synchrotronstrahlung zu. Die Helligkeitsinformation der einzelnen Pixel des CCD – Chips werden in Strahlungsintensitäten umgerechnet. Dieses Prinzip ist anwendbar, weil die Kamera das aufgenommene Signal in einem 8 – Bit Code umsetzt. Nachdem die Transformation der Signale ausgeführt ist, werden beide Informationen auf einem Monitor angezeigt. Zum einen wird das aufgenommene Bild direkt in den Beschleuniger Kontrollraum übertragen, zum anderen werden die ausgewerteten Intensitätsinformationen neben dem Bild eingespielt. Durch diese Transformation des Signals ist es möglich eine Intensitätsverteilung anzugeben, die neben dem Abbild (Abb. 2-2) ebenfalls angezeigt wird. Durch diese Intensitätsverteilung lassen sich Rückschlüsse auf die Strahlemittanz ziehen.
Die Kamera
Abb. 5-9: Das Abbild der eingesetzten Kamera JAI – 300 M
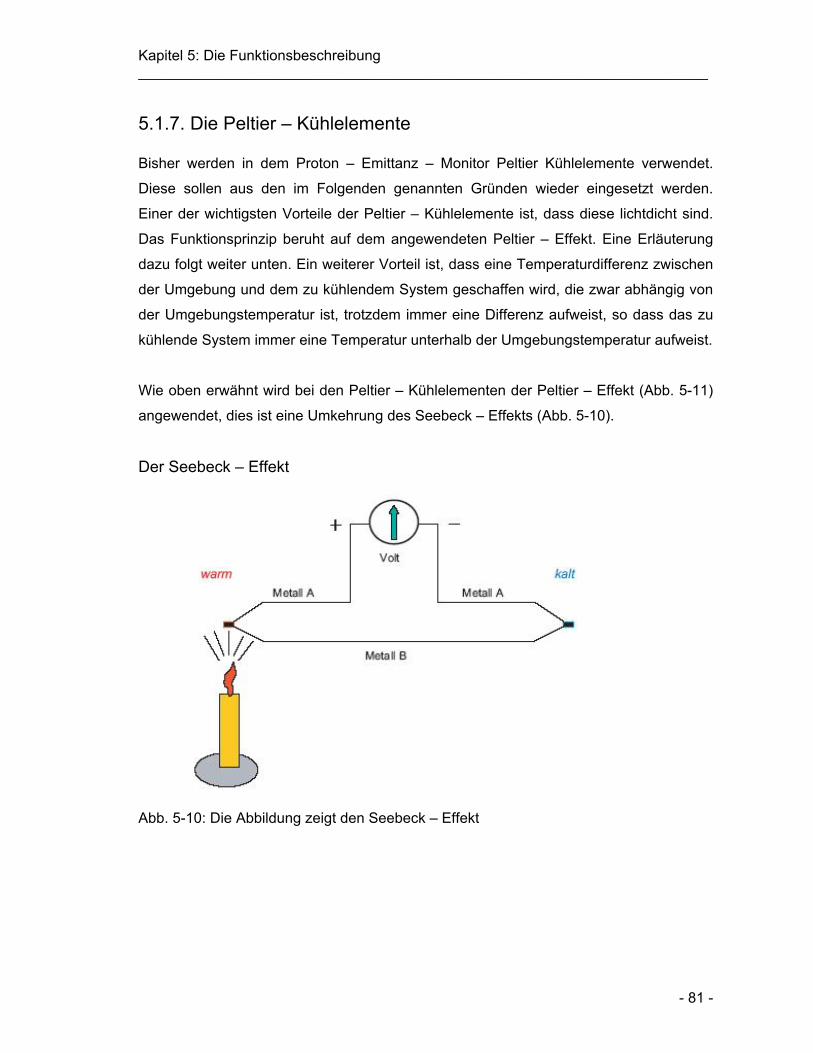
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 81 -
5.1.7. Die Peltier – Kühlelemente Bisher werden in dem Proton – Emittanz – Monitor Peltier Kühlelemente verwendet.
Diese sollen aus den im Folgenden genannten Gründen wieder eingesetzt werden.
Einer der wichtigsten Vorteile der Peltier – Kühlelemente ist, dass diese lichtdicht sind.
Das Funktionsprinzip beruht auf dem angewendeten Peltier – Effekt. Eine Erläuterung
dazu folgt weiter unten. Ein weiterer Vorteil ist, dass eine Temperaturdifferenz zwischen
der Umgebung und dem zu kühlendem System geschaffen wird, die zwar abhängig von
der Umgebungstemperatur ist, trotzdem immer eine Differenz aufweist, so dass das zu
kühlende System immer eine Temperatur unterhalb der Umgebungstemperatur aufweist.
Wie oben erwähnt wird bei den Peltier – Kühlelementen der Peltier – Effekt (Abb. 5-11)
angewendet, dies ist eine Umkehrung des Seebeck – Effekts (Abb. 5-10).
Der Seebeck – Effekt
Abb. 5-10: Die Abbildung zeigt den Seebeck – Effekt
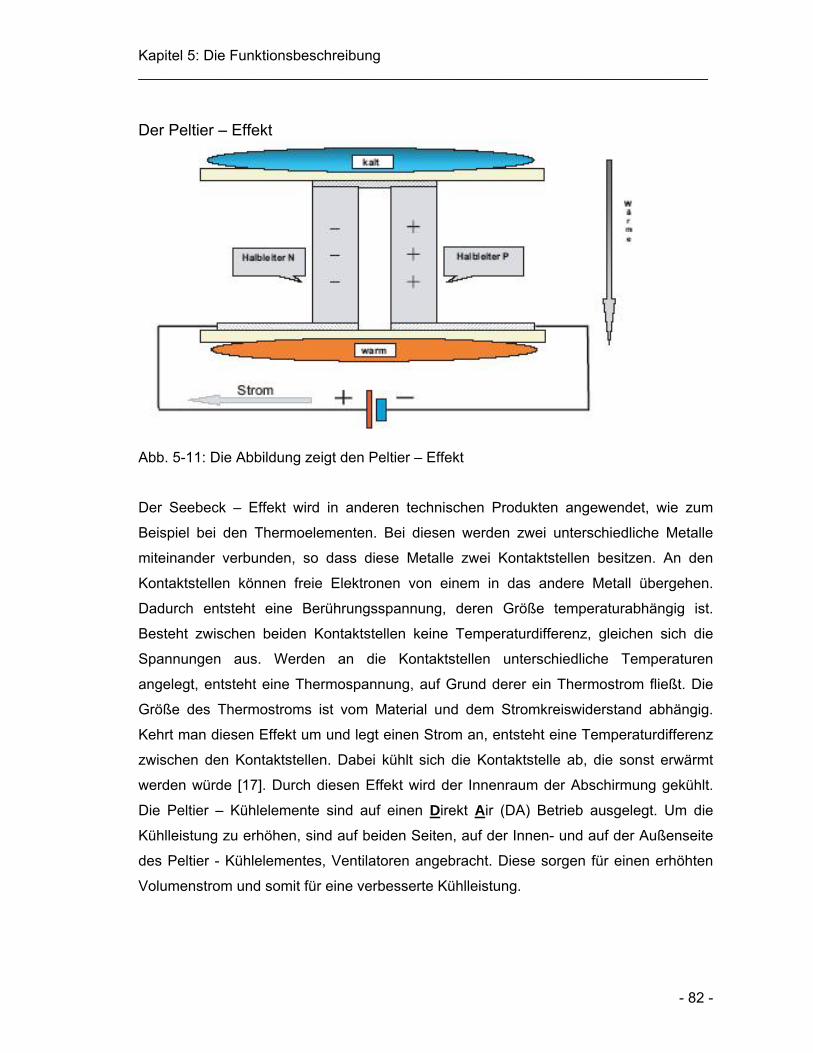
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 82 -
Der Peltier – Effekt
Abb. 5-11: Die Abbildung zeigt den Peltier – Effekt
Der Seebeck – Effekt wird in anderen technischen Produkten angewendet, wie zum
Beispiel bei den Thermoelementen. Bei diesen werden zwei unterschiedliche Metalle
miteinander verbunden, so dass diese Metalle zwei Kontaktstellen besitzen. An den
Kontaktstellen können freie Elektronen von einem in das andere Metall übergehen.
Dadurch entsteht eine Berührungsspannung, deren Größe temperaturabhängig ist.
Besteht zwischen beiden Kontaktstellen keine Temperaturdifferenz, gleichen sich die
Spannungen aus. Werden an die Kontaktstellen unterschiedliche Temperaturen
angelegt, entsteht eine Thermospannung, auf Grund derer ein Thermostrom fließt. Die
Größe des Thermostroms ist vom Material und dem Stromkreiswiderstand abhängig.
Kehrt man diesen Effekt um und legt einen Strom an, entsteht eine Temperaturdifferenz
zwischen den Kontaktstellen. Dabei kühlt sich die Kontaktstelle ab, die sonst erwärmt
werden würde [17]. Durch diesen Effekt wird der Innenraum der Abschirmung gekühlt.
Die Peltier – Kühlelemente sind auf einen Direkt Air (DA) Betrieb ausgelegt. Um die
Kühlleistung zu erhöhen, sind auf beiden Seiten, auf der Innen- und auf der Außenseite
des Peltier - Kühlelementes, Ventilatoren angebracht. Diese sorgen für einen erhöhten
Volumenstrom und somit für eine verbesserte Kühlleistung.
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 83 -
5.1.8. Die Spannungsversorgung und der Signalfluss
In der Konzeptphase wurde festgestellt, dass die Nachweisende Funktionsgruppe am
besten mit elektrischer Energie gespeist wird. Für die Energieversorgung des Monitors
werden demnach verschiedene Spannungen benötigt. Zum Einen werden Spannungen
in den Bereichen 12V DC und 24V DC benötigt, zum Anderen Hochspannung im
Bereich zwischen 1-2kV DC. Es müssen also mindestens drei verschiedene
Spannungswandler vorgesehen werden. Da die elektrischen Anschlüsse wieder
verwendet werden sollen, sind die Spannungsquellen für die Kamera und die Peltier –
Kühlelemente bereits vorhanden. Auch das Signalkabel in Form eines BNC Anschlusses
für die Kamera ist bereits vorhanden und soll weiterhin eingesetzt werden. Es ist eine
Spannungsquelle für die Schrittmotoren vorzusehen. Außerdem benötigt die
Schrittmotorsteuerung eine Signalleitung. Beides muss noch im HERA – Tunnel bzw. in
dem Elektronik - Raum installiert werden. In dem Elektronik - Raum werden noch weitere
Komponenten benötigt: Eine Hochspannungsquelle zur Versorgung des Photomultipliers
und ein Oszilloskop zur Auswertung des Stromes, den der Phtomultiplier liefert. Die
schematischen Darstellungen des Signalflusses (Abb. 5-12) und des Energieflusses
(Abb. 5-13) sind in den folgenden Darstellungen abgebildet.
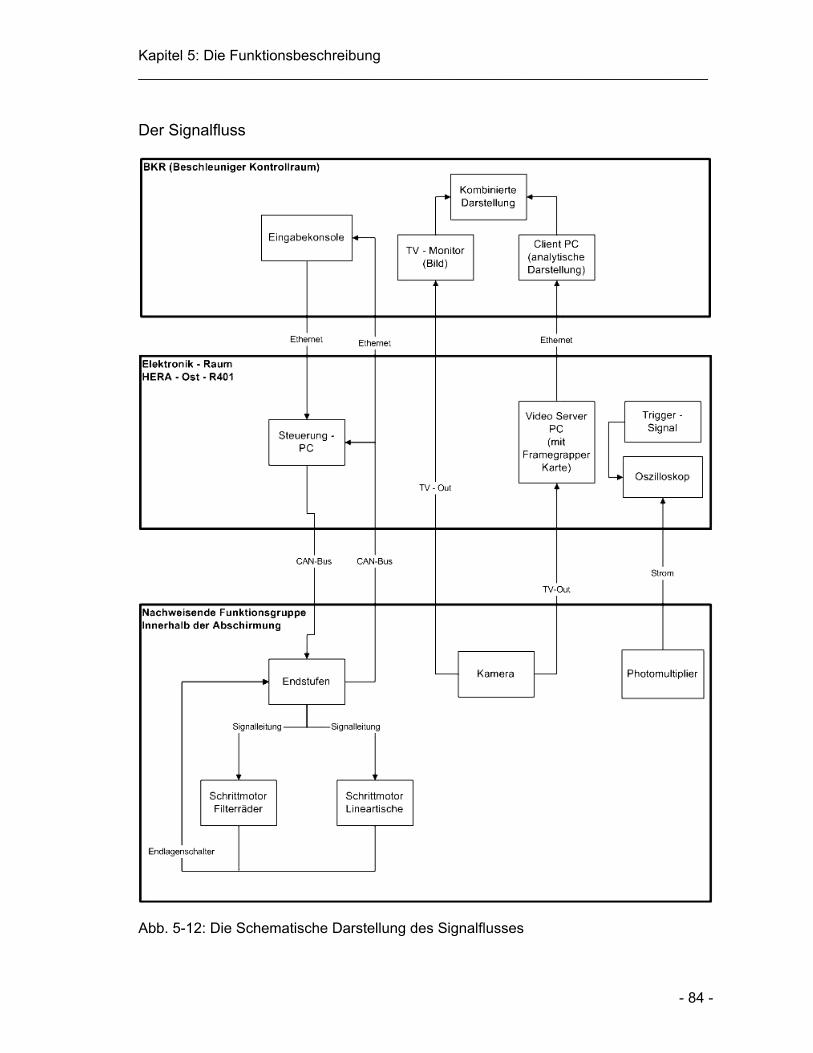
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 84 -
Der Signalfluss
Abb. 5-12: Die Schematische Darstellung des Signalflusses
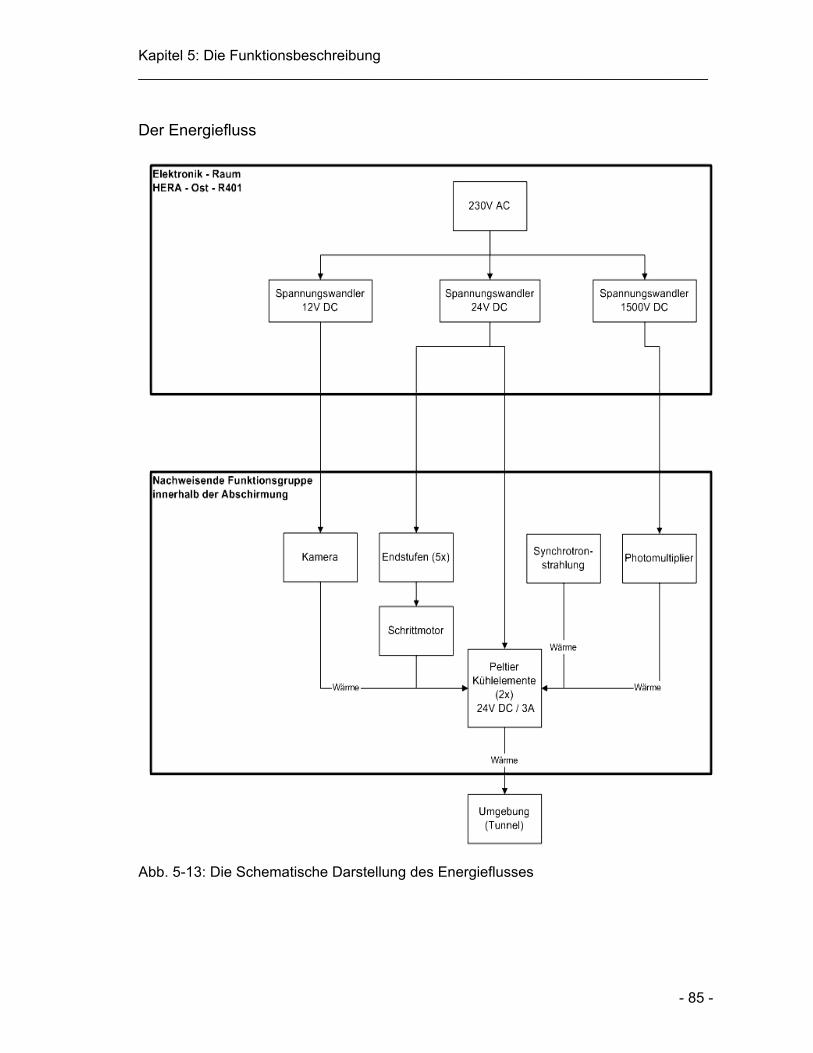
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 85 -
Der Energiefluss
Abb. 5-13: Die Schematische Darstellung des Energieflusses

Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 86 -
5.2. Die Zusammenfassung der Gesamtfunktion
Dieses Kapitel beschreibt die Gesamtfunktion der technischen Komponenten. Es dient
der Zusammenfassung der bisher beschriebenen Einzelfunktionen. Abschließend vor
dem Beginn der Konstruktion wird hierdurch das Ziel erneut fixiert. Das ist deshalb
besonders wichtig, weil nun die einzelnen zu verwendenden Komponenten und deren
Funktionsumfang, sowie deren Abmessungen genau bekannt sind.
Bei dieser Zusammenfassung ist der Ausgangspunkt die Synchrotronstrahlung. Diese
fällt durch die einzige verbliebene Öffnung der Abschirmung gezielt ein. Der geradlinige
Strahl trifft, nachdem er die Filtereinsätze passiert hat, auf den angewählten Detektor.
Die Auswahl der Detektoren erfolgt über einen der Lineartische, der funktionsgemäß das
Verfahren der Detektoren gewährleistet. Der für die Auswahl der Detektoren ausgelegte
Lineartisch ist so dimensioniert worden, dass er über den geforderten Verfahrweg eine
weitere Strecke verfahren kann, die ausreicht, um einen Wechsel der Detektoren
auszuführen. Durch die Kombination der drei Lineartische ist es nach Auswahl des
aktiven Detektors möglich, die optimale Bildweite anzusteuern. Der zum Einsatz
kommende Photomultiplier ermittelt, wo genau die Position der Synchrotronstrahlung ist
und misst die Strahlungsintensität. Die Kamera liefert nun als nachweisendes Element
die Daten, die zur Beurteilung des Elementarteilchenstrahls benötigt werden. Das Abbild
und die digitalisierte Intensitätsverteilung werden online auf den Kontrollbildschirm in
den BKR übertragen.
Die dafür notwendigen Nebenfunktionen beinhalten die Fernsteuerbarkeit und die
Abschirmung der Detektoren, die Steuereinheiten für die Lineartische sowie das
Tragegestell. Die Fernsteuerbarkeit wird mittels eines PC für die Steuerung der
Schrittmotoren und das entsprechende Übertragungsmedium, das Intranet und den CAN
– Bus, realisiert. Die Endstufen, die das andere Ende der Fernsteuerungssignalkette
darstellen, speisen die Schrittmotoren entsprechend der Steuerdaten mit Spannungen,
Strom und Schrittfrequenzen. Die Abschirmung dient, wie beschrieben, dem Schutz der
Komponenten gegen die Untergrundstrahlung im Beschleunigertunnel und gegen den
Einfall von Fremdlicht in den Messaufbau. Die letztere Funktion ist insbesondere bei der
Konstruktion zu berücksichtigen. Das Tragegestell soll die Nachweisende
Kapitel 5: Die Funktionsbeschreibung ______________________________________________________________________
- 87 -
Funktionsgruppe ortsfest im Beschleunigertunnel fixieren. Außerdem erfüllt das Gestell
die Funktion der Schwingungsdämpfung. Diese Funktion wird von einem speziellen
Dämpfungsmaterial übernommen. Dieses wird zwischen dem Tragegestell und der
Abschirmung platziert.
Nachdem nun in diesem Kapitel der Funktionsumfang der neuen Nachweisenden
Funktionsgruppe zusammenfassend beschrieben wurde, wird deutlich, wie die
erforderlichen Funktionen und Anforderungen in der Konstruktion umgesetzt werden
müssen.
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 88 -
6. Die Konstruktionsphase
Nachdem in der Konzeptphase der Gesamtentwurf für die neu zu konstruierende
Nachweisende Funktionsgruppe erstellt wurde, die Komponenten ermittelt und der
geforderte Funktionsumfang fixiert wurde, kann nun mit der Umsetzung der
Erkenntnisse durch die Konstruktion begonnen werden.
In diesem Kapitel werden im folgenden kurz die Struktur der Arbeiten und die während
der Konstruktion genutzten Hilfsmittel erläutert.
Die Entwicklung, die Dokumentation und die Herstellung von Produkten werden immer
stärker durch Computer – Software unterstützt. Dies erleichtert bei durchgängiger
Anwendung die Arbeit des Konstrukteurs, beginnend bei der Konstruktion, über die
Berechnung bis hin zu der Fertigung, erheblich. Für die optimale Ausnutzung der
Computer – Software sind einige Punkte vorab zu bedenken. Damit die Vorteile einer
Computerintegrierten Produktion (engl. CIM - Computer Integrated Manufacturing) zur
Geltung kommen können, ist es wichtig, die Leistungsfähigkeit und die Vernetzung der
zu nutzenden Ressourcen zu kennen.
Während der Konstruktion wird eine CAD – Software (engl. Computer Aided Design)
eingesetzt. Diese muss über Schnittstellen und Netzwerke mit anderen Programmen
Daten austauschen können. Zum Beispiel sollen aus den erstellten 3D – Modellen Daten
für eine CNC gesteuerte Fertigung nach dem CAM – Prinzip (engl. Computer Aided
Manufacturing) erstellt werden. Dazu muss sichergestellt sein, dass beide Programme
über geeignete Schnittstellen für die Datenkonvertierung verfügen. Neben dieser
Schnittstelle ist der Austausch der 3D – Modelle ein wichtiger Punkt. Dies geschieht mit
einer speziellen EDI – Applikation (engl. Electronic Data Interchange). Eine solche
Software ermöglicht generell den Austausch von 3D – Modellen mit anderen
Gruppenmitgliedern und anderen Nutzern, wie zum Beispiel OEM´s, Zulieferern oder
Lohnfertigungsunternehmen.
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 89 -
Ein weiterer wichtiger Punkt, der vor Beginn der Konstruktion zu klären ist, bezieht sich
auf das zu verwendende Koordinatensystem. Zwar ist es durch den Einsatz der
modernen 3D – CAD Software möglich, die Bauteil ohne jeden Bezug zu ihrem späteren
Koordinatesystem zu erzeugen. Trotzdem ist eine Festlegung des Koordinatensystems
aus verschiedenen Gründen wichtig. Zum Einen haben andere Nutzer der Daten dann
einen festen Bezug zu den Bauteilen. Zum Anderen können die Bauteile mittels des
globalen Koordinatensystems direkt in ihrer späteren Lage erzeugt und in bestehende
oder zukünftige Konstruktionen integriert werden. Die Verwendung des im
Teilchenbeschleuniger HERA vorgegebenen Koordinatensystems ist aus diesen
Gründen sehr zielorientiert. Das Koordinatensystem bezieht sich auf die Strahlachse des
Teilchenstrahls. Die positive z-Richtung wurde in Beschleunigungsrichtung des
Elektronenstrahls festgelegt. Daraus resultiert für den Monitor das in der Abbildung 4-2
dargestellte Koordinatensystem.
Nachdem nun die organisatorischen Rahmenbedingungen für die CAD – Anwendung
geklärt sind, wird in dem folgenden Kapitel kurz die Auswahl des CAD – Programms für
diese Aufgabe und das Vorgehen zur Strukturierung der 3D – Konstruktion erläutert.
Nach der Erläuterung der Dimensionierung im anschließenden Kapitel werden die
Ergebnisse der Bauteilberechnungen präsentiert.
6.1. Die Konstruktion mittels eines 3D – CAD Systems
Für diese Konstruktion wird ein 3D High End CAD – Programm eingesetzt. Der Gruppe
MDI stehen zwei verschiedene CAD – Programme zur Verfügung. Das CAD – Tool
„I –DEAS“ und „Solide Edge“. Beide Programme sind für eine 3D – Konstruktion sehr gut
geeignet. I – DEAS bietet über die geforderten Funktionalitäten hinaus noch einige
zusätzliche nützliche Applikationen, wie zum Beispiel eine FEM – Applikation. Viele
Konstruktionen, die den Teilchenbeschleuniger HERA betreffen, sind auf dem I – DEAS
System entstanden. Aus diesen beiden Gründen wird das Programm I – DEAS zur
Modellerzeugung eingesetzt.
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 90 -
Um einen effektiven Einsatz der CAD – Software zu gewährleisten, muss eine durchgängige Produktstruktur erstellt werden. In diesem Fall sollte die Produktstruktur sich an den Baugruppen der neu zu konstruierenden Nachweisenden Funktionsgruppe orientieren. Dadurch entstehen Vorteile; beispielsweise können die einzelnen Bauteile einer Baugruppe während des Konstruktionsprozesses ohne Einflussnahme auf andere Baugruppen verändert werden. Zur Erstellung der Baugruppen während der Assembly – Phase ist eine Baugruppenstruktur zielführend. Jedem Bauteil müssen bei der Baugruppenerstellung Zwangsbedingungen zugewiesen werden. Ein Produkt ohne eindeutige Struktur würde eine Vielzahl von redundanten Zwangsbedingungen enthalten. Ein strukturierter Zusammenbau würde dadurch sehr erschwert. Als erstes wird damit begonnen, die Produktstruktur im Sinne eines Baugruppen – Managements zu strukturieren. Da in der Konzeptphase durch das Erstellen der Teilfunktionen schon eine Struktur entstanden ist, wird auf diese zurückgegriffen. Die Produktstruktur gliedert die einzelnen Baugruppen in die entsprechenden Teilfunktionen und Unterfunktionen. Hier eine Auflistung der zu erstellenden Baugruppen:
• Baugruppe A: Neutronenabschirmung
• Baugruppe B: Gammaabschirmung
• Baugruppe C: Positionierungseinheit
• Baugruppe D: Detektoren
• Baugruppe E: Hubtisch
• Baugruppe F: Anbauteile
• Baugruppe G: Tragegestell
Einige dieser Baugruppen fassen einzelne Teilfunktionen und Unterfunktionen zusammen und stellen außerdem eine geeignete Fertigungsstruktur dar. Ein Grund dafür ist, dass einige der Baugruppen nicht in hausinternen Werkstätten gefertigt werden. Zum Beispiel die Gammaabschirmungen; die aus Blei bestehenden Bauteile, werden auf Grund der zur Bleiverarbeitung einzuhaltenden Sicherheitsvorschriften von einem speziellen Lohnfertigungsunternehmen hergestellt. Ähnliches gilt für die Neutronenabschirmung aus Tetra – Boroxid. Die vorhandene Werkstattstruktur ist nicht für derart große Dimensionen der Kunststoffbearbeitung ausgelegt. Deshalb wird die Fertigung ebenfalls an ein Lohnfertigungsunternehmen abgegeben.
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 91 -
Die beschriebenen Besonderheiten werden bei der Baugruppenstruktur dadurch berücksichtigt, dass diese Baugruppen separat erstellt werden. Die Baugruppe Positionierung fasst mehrere Teilfunktionen zusammen. Zum Einen die
Teilfunktion 1, Positionierung der Detektoren, und zum Anderen die Teilfunktion 2,
Wechsel der Detektoren. Die Baugruppe Detektoren beinhaltet sowohl die beiden
Detektoren als auch Bauteile, die der Befestigung der Detektoren dienen, und außerdem
einige elektrische Komponenten.
Der Hubtisch ist eine Eigenkonstruktion und wird vollständig in hausinternen Werkstätten
gefertigt. Aus diesem Grund ist der Hubtisch eine eigene Baugruppe. Diese erfüllt die
Teilfunktion 6, Positionierung der Filterräder. Da die Filterräder die Teilfunktion 5,
Filterwechsel, beinhalten, werden diese mit in der Baugruppe Hubtisch verwaltet. Die
Filterräder sind Kaufteile und werden als „grobes Modell“ nur mit den entsprechenden
Anschlussmaßen in der 3D – CAD – Software erzeugt.
In der Baugruppe Anbauteile sind alle Komponenten und Bauteile zusammengefasst,
die zu keiner Funktion der anderen Baugruppen gehören. Beispielsweise die Blenden für
die elektrischen Abschlüsse oder die Halterung der Endstufen für die Schrittmotoren.
Ferner gehören dazu weitere Kabelverbindungen und Stecker.
Das 3D – Modell wird mittels I-DEAS in den unterschiedlichen Programm –
Applikationen erzeugt. Zu Beginn werden die Bauteile in einem „Modeler“ erstellt. In der
Modeler – Applikation werden als erstes in einer „2D Oberfläche“ die Konturen der
Bauteile erzeugt. Durch Extrudieren wird aus der Kontur ein 3D – Modell. An diesen 3D
– Modellen werden weitere Formänderungen wie Bohrungen, Aussparungen und Fasen
erzeugt.
Eine andere Programm – Applikation, das Assembly, wird dazu genutzt, um die
erzeugten Bauteile zu einer Baugruppe zusammen zu fügen. Diese Baugruppen werden
durch Zwangsbedingungen weiter verknüpft. So entsteht aus den einzelnen
Baugruppen - Assemblys das neue Produkt.
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 92 -
6.2. Die Dimensionierung der Bauteile
Nachdem die Produktstruktur erstellt ist, kann mit der Erzeugung der 3D – Modelle und der Dimensionierung der Bauteile begonnen werden. Die Dimensionierung der Bauteile erfolgt nach dem „Inside Out“ Prinzip. Das bedeutet, dass von innen nach außen konstruiert wird. Durch dieses Vorgehen wird der minimale Bauraum erreicht, da alle Bauteile kompakt als Baugruppe zusammengefügt werden. Die innersten Baugruppen, die Positionierung, die Detektoren und der Hubtisch, bestimmen somit den Raumbedarf, der von der Abschirmung umgeben werden muss. Die Baugruppe Positionierung hat auf Grund der Lineartische die größten äußeren Abmaße. Deshalb wird diese Baugruppe zuerst erzeugt. Die Bauteile, die zur Verbindung der Lineartische benötigt werden, sind daher vorrangig zu bearbeiten. Die benötigten Abmaße ergeben sich aus den Gesamtabmessungen der Lineartische. Den Verbindungselementen wird als Versagensgrenze eine maximale zulässige Verformung zugeordnet. Daraus folgt, wie bei der Berechnung nachgewiesen wird, eine Überdimensionierung im Sinne der maximalen zulässigen Spannungen. Die Detektoren sind an der Positionierung befestigt, somit werden diese im nächsten Schritt als Modell erzeugt und zu einer Baugruppe zusammengefasst. Diese Baugruppe wird nun mit der Positionierung verbunden. Im nachfolgenden Schritt wird die Baugruppe Hubtisch erzeugt, diese ist die letzte der den Bauraum bestimmenden Baugruppen. Die erzeugten Baugruppen werden so angeordnet, dass sie bei vollem Funktionsumfang den geringsten Raumbedarf und die kleinsten Materialbeanspruchungen aufweisen. Die Baugruppen der Neutronenabschirmung und der Gammaabschirmung erfüllen zwei Aufgaben. Als Erstes sollen diese ihre Hauptfunktion erfüllen, nämlich die umbauten Bauteile und Komponenten vor der Untergrundstrahlung schützen. Als Zweites dient die Neutronenabschirmung der Befestigung der anderen Baugruppen. Durch die Befestigung der Positionierung und des Hubtisches an der Neutronenabschirmung wird ein erhöhter Raumbedarf einer Befestigungsstruktur umgangen. Die nötige Flexibilität der Nachweisenden Funktionsgruppe wird durch die Schnittstelle zwischen der Baugruppe der Positionierung und der Baugruppe der Detektoren erhalten. Die Dimensionen der Neutronenabschirmung und der Gammaabschirmung sind in der Anforderungsliste aufgeführt und durch den Raumbedarf der zu umschließenden Baugruppen gegeben.
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 93 -
Die Bauteile werden nach diesen Angaben dimensioniert. Die Berechnung erfolgt nach der Dimensionierung der Bauteile und dem Zusammenfügen der einzelnen Baugruppen zu einem Gesamtprodukt. Dieses Vorgehen wird ermöglicht, da Änderungen der Bauteildimensionen, die sich während der Berechnung ergeben, durch die assoziative Struktur von I-DEAS einfach vorzunehmen sind. Das bedeutet, dass durch die zugewiesenen Zwangsbedingungen die anderen Bauteile automatisch an die vorgenommenen Veränderungen angepasst werden. Außerdem sind erst nach der Dimensionierung die wirklichen Lasten, die durch die Bauteile entstehen, bekannt.
6.3. Die Berechnung der Komponenten und der Bauteile Zur Berechnung der Bauteile und der Komponenten wurde das Programm MathCad 2001 genutzt. Die zu der Berechnung benötigten Formeln sind den Büchern „Rolff / Matek - Maschinenelemente“ [18], und „Technische Mechanik – Herr und Frau Dankert“ [19] entnommen und unten exemplarisch in der verwendeten Reihenfolge aufgeführt. In diesem Abschnitt sind nur die relevanten Ergebnisse angeführt, die genauen Rechenwege und Gleichungen sind dem Anhang zu entnehmen. Weil es sich hier um grundlegende Gleichungen handelt sind die Symbolerklärungen Kapitel III zu entenhemen. Die verwendeten Lineartische geben die dynamischen Rahmenbedingungen, die Beschleunigung und die Geschwindigkeit, vor. Daher werden diese Komponenten zuerst berechnet. Im Anschluss werden die aus den statischen Belastungen resultierenden Verformungen bestimmt. Darauf aufbauend werden die dynamischen Einflüsse auf die Positionierung und der Einfluss der erhöhten Umgebungstemperatur betrachtet.
6.3.1.Die Berechnung der Komponenten Die Berechnung der Komponenten bezieht sich ausschließlich auf die Lineartische. Es sind die für die dynamischen Belastungen ausschlaggebenden Komponenten. Bei der Ansteuerung der Lineartische werden die Beschleunigungen und die Geschwindigkeiten vorgegeben. Da in der Anforderungsliste keine definierten Beschleunigungen und Geschwindigkeiten angegeben sind, werden hier vorrangig diese Größen bestimmt.

Kapitel 6: Die Konstruktion ______________________________________________________________________
- 94 -
6.3.1.1. Die Berechnung der Geschwindigkeit und der Beschleunigung
Zur Berechnung der dynamischen Leistungsfähigkeit wurden in diesem Abschnitt die
hier aufgeführten Gleichungen eingesetzt.
tva = Gl. 6-1
2* 2tas = Gl. 6-2
gungskraftBeschleunigtemasseBeschleunia =max Gl. 6-3
max
max
av
t = Gl. 6-4
Die vom Hersteller der Lineartische angegebene maximale Geschwindigkeit bei voller Last beträgt 9mm/s, das ist für die Positionierung der Detektoren eine sinnvolle Geschwindigkeit. Daraus folgt, dass die längste zurückzulegende Strecke innerhalb von ca. 35 Sekunden verfahren werden kann. Zum Anfahren einer definierten Position ist es erforderlich, dass die Geschwindigkeiten nicht zu groß sind. Durch die Trägheit des Systems wird das Anfahren einer definierten Position bei hohen Geschwindigkeiten erschwert. Als Anfahrzeit sind 0.5s eine sinnvolle Zeitspanne. Hieraus errechnet sich eine Beschleunigung von 18mm/s2. Dies bedeutet, dass eine Strecke von 2.25mm während der Beschleunigung überfahren wird. Auch dieses Ergebnis ist aus technischer Sicht gut geeignet, da bei genauer Positionierung die Beschleunigung nicht voll ausgereizt werden muss. Das hat den Vorteil, dass je nach Streckenbedarf, die Beschleunigungsphase reguliert werden kann. Der Hersteller gibt eine maximale Stellkraft von 60N an. Aus dieser Kraft und den zu beschleunigenden Massen ergibt sich eine maximale Beschleunigung von 7292 mm/s2. Bei dieser Beschleunigung würden erhebliche Verformungen der Bauteile auf Grund der eigenen Massenträgheit entstehen. Deshalb wird empfohlen, die Beschleunigung auf 18mm/s2 zu begrenzen und entsprechend die Schrittfrequenz zu regulieren. Ein weiterer
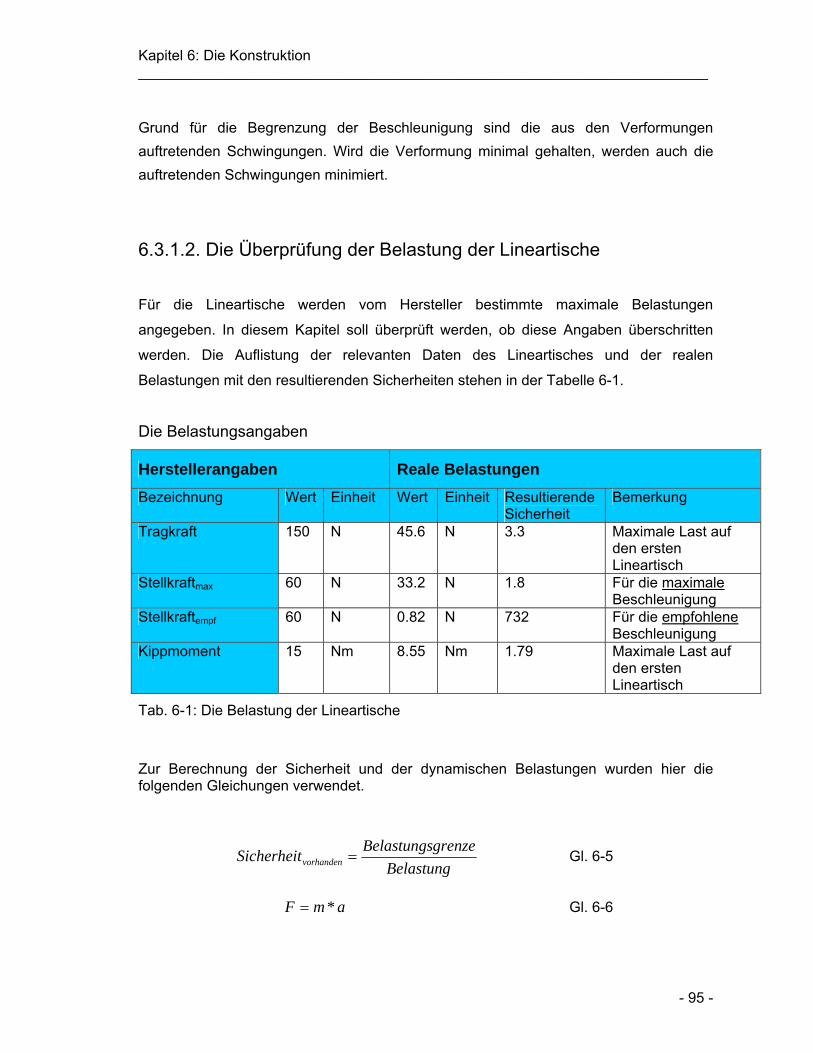
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 95 -
Grund für die Begrenzung der Beschleunigung sind die aus den Verformungen auftretenden Schwingungen. Wird die Verformung minimal gehalten, werden auch die auftretenden Schwingungen minimiert.
6.3.1.2. Die Überprüfung der Belastung der Lineartische
Für die Lineartische werden vom Hersteller bestimmte maximale Belastungen
angegeben. In diesem Kapitel soll überprüft werden, ob diese Angaben überschritten
werden. Die Auflistung der relevanten Daten des Lineartisches und der realen
Belastungen mit den resultierenden Sicherheiten stehen in der Tabelle 6-1.
Die Belastungsangaben
Herstellerangaben Reale Belastungen Bezeichnung Wert Einheit Wert Einheit Resultierende
Sicherheit Bemerkung
Tragkraft 150 N 45.6 N 3.3 Maximale Last auf den ersten Lineartisch
Stellkraftmax 60 N 33.2 N 1.8 Für die maximale Beschleunigung
Stellkraftempf 60 N 0.82 N 732 Für die empfohlene Beschleunigung
Kippmoment 15 Nm 8.55 Nm 1.79 Maximale Last auf den ersten Lineartisch
Tab. 6-1: Die Belastung der Lineartische
Zur Berechnung der Sicherheit und der dynamischen Belastungen wurden hier die folgenden Gleichungen verwendet.
BelastunggrenzeBelastungsSicherheitvorhanden = Gl. 6-5
amF *= Gl. 6-6
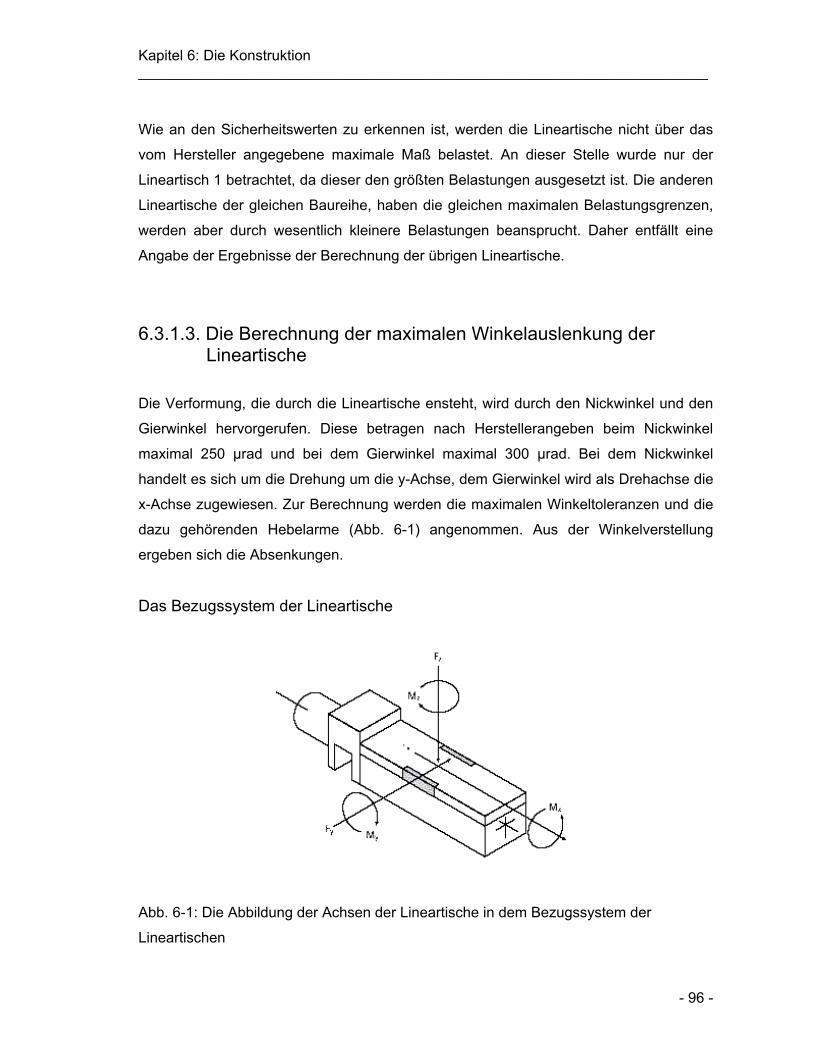
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 96 -
Wie an den Sicherheitswerten zu erkennen ist, werden die Lineartische nicht über das
vom Hersteller angegebene maximale Maß belastet. An dieser Stelle wurde nur der
Lineartisch 1 betrachtet, da dieser den größten Belastungen ausgesetzt ist. Die anderen
Lineartische der gleichen Baureihe, haben die gleichen maximalen Belastungsgrenzen,
werden aber durch wesentlich kleinere Belastungen beansprucht. Daher entfällt eine
Angabe der Ergebnisse der Berechnung der übrigen Lineartische.
6.3.1.3. Die Berechnung der maximalen Winkelauslenkung der Lineartische
Die Verformung, die durch die Lineartische ensteht, wird durch den Nickwinkel und den
Gierwinkel hervorgerufen. Diese betragen nach Herstellerangeben beim Nickwinkel
maximal 250 μrad und bei dem Gierwinkel maximal 300 μrad. Bei dem Nickwinkel
handelt es sich um die Drehung um die y-Achse, dem Gierwinkel wird als Drehachse die
x-Achse zugewiesen. Zur Berechnung werden die maximalen Winkeltoleranzen und die
dazu gehörenden Hebelarme (Abb. 6-1) angenommen. Aus der Winkelverstellung
ergeben sich die Absenkungen.
Das Bezugssystem der Lineartische
Abb. 6-1: Die Abbildung der Achsen der Lineartische in dem Bezugssystem der
Lineartischen
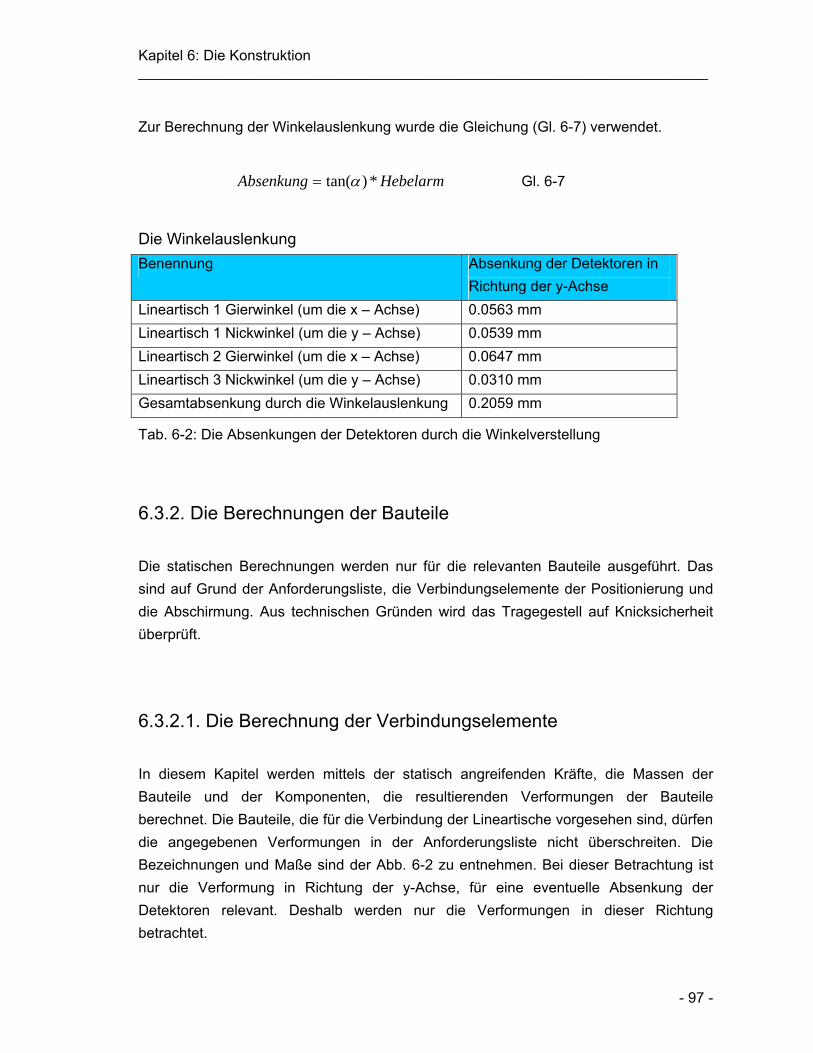
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 97 -
Zur Berechnung der Winkelauslenkung wurde die Gleichung (Gl. 6-7) verwendet.
HebelarmAbsenkung *)tan(α= Gl. 6-7
Die Winkelauslenkung Benennung Absenkung der Detektoren in
Richtung der y-Achse Lineartisch 1 Gierwinkel (um die x – Achse) 0.0563 mm Lineartisch 1 Nickwinkel (um die y – Achse) 0.0539 mm Lineartisch 2 Gierwinkel (um die x – Achse) 0.0647 mm Lineartisch 3 Nickwinkel (um die y – Achse) 0.0310 mm Gesamtabsenkung durch die Winkelauslenkung 0.2059 mm
Tab. 6-2: Die Absenkungen der Detektoren durch die Winkelverstellung
6.3.2. Die Berechnungen der Bauteile Die statischen Berechnungen werden nur für die relevanten Bauteile ausgeführt. Das sind auf Grund der Anforderungsliste, die Verbindungselemente der Positionierung und die Abschirmung. Aus technischen Gründen wird das Tragegestell auf Knicksicherheit überprüft.
6.3.2.1. Die Berechnung der Verbindungselemente In diesem Kapitel werden mittels der statisch angreifenden Kräfte, die Massen der Bauteile und der Komponenten, die resultierenden Verformungen der Bauteile berechnet. Die Bauteile, die für die Verbindung der Lineartische vorgesehen sind, dürfen die angegebenen Verformungen in der Anforderungsliste nicht überschreiten. Die Bezeichnungen und Maße sind der Abb. 6-2 zu entnehmen. Bei dieser Betrachtung ist nur die Verformung in Richtung der y-Achse, für eine eventuelle Absenkung der Detektoren relevant. Deshalb werden nur die Verformungen in dieser Richtung betrachtet.
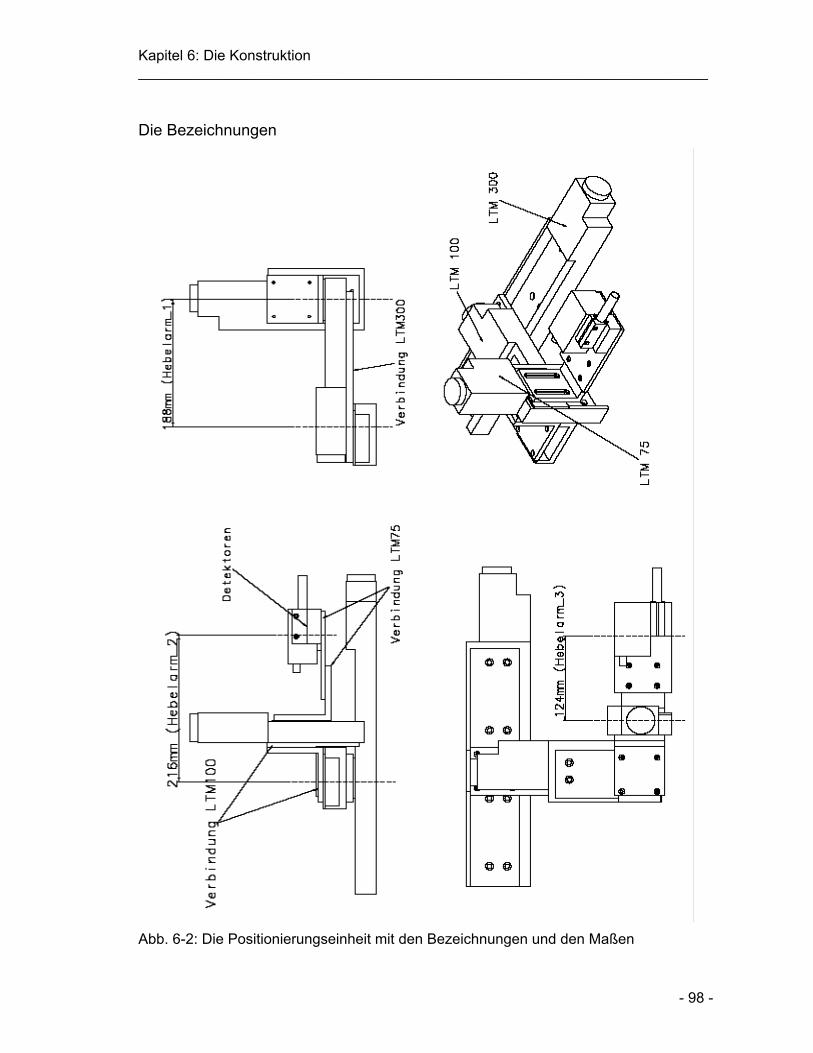
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 98 -
Die Bezeichnungen
Abb. 6-2: Die Positionierungseinheit mit den Bezeichnungen und den Maßen
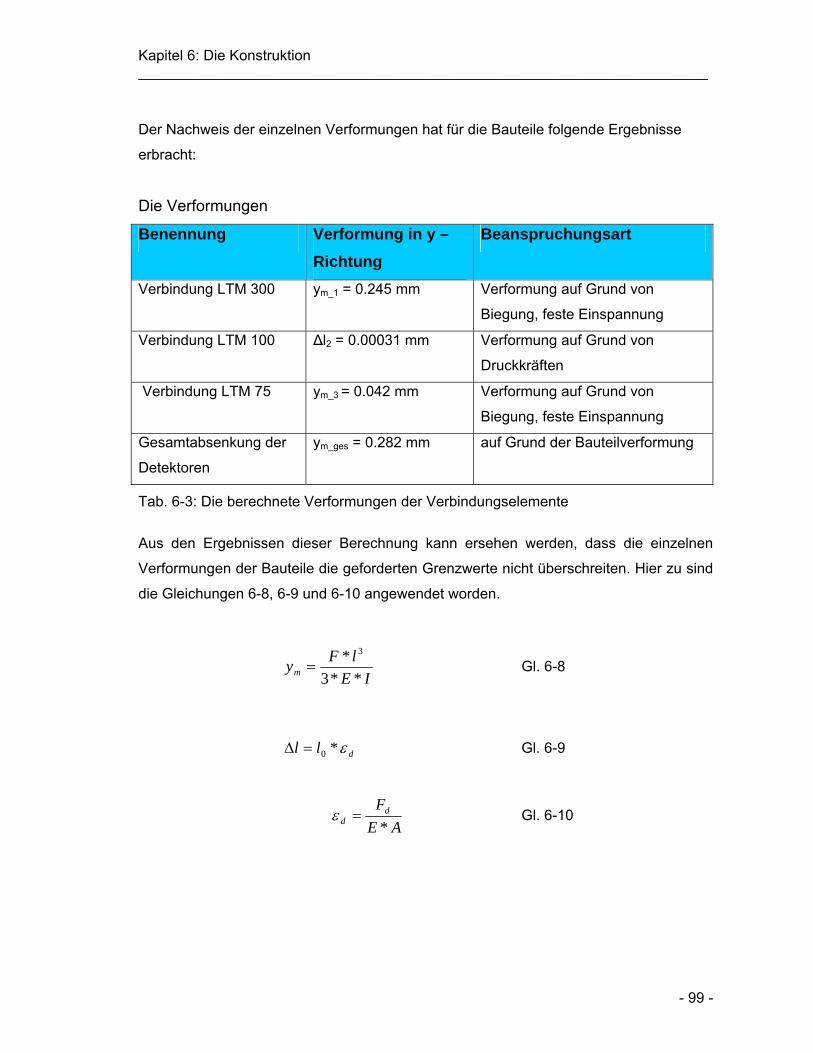
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 99 -
Der Nachweis der einzelnen Verformungen hat für die Bauteile folgende Ergebnisse
erbracht:
Die Verformungen
Benennung Verformung in y – Richtung
Beanspruchungsart
Verbindung LTM 300 ym_1 = 0.245 mm Verformung auf Grund von
Biegung, feste Einspannung
Verbindung LTM 100 Δl2 = 0.00031 mm Verformung auf Grund von
Druckkräften
Verbindung LTM 75 ym_3 = 0.042 mm Verformung auf Grund von
Biegung, feste Einspannung
Gesamtabsenkung der
Detektoren
ym_ges = 0.282 mm auf Grund der Bauteilverformung
Tab. 6-3: Die berechnete Verformungen der Verbindungselemente
Aus den Ergebnissen dieser Berechnung kann ersehen werden, dass die einzelnen
Verformungen der Bauteile die geforderten Grenzwerte nicht überschreiten. Hier zu sind
die Gleichungen 6-8, 6-9 und 6-10 angewendet worden.
IE
lFym **3* 3
= Gl. 6-8
dll ε*0=Δ Gl. 6-9
AE
Fdd *=ε Gl. 6-10
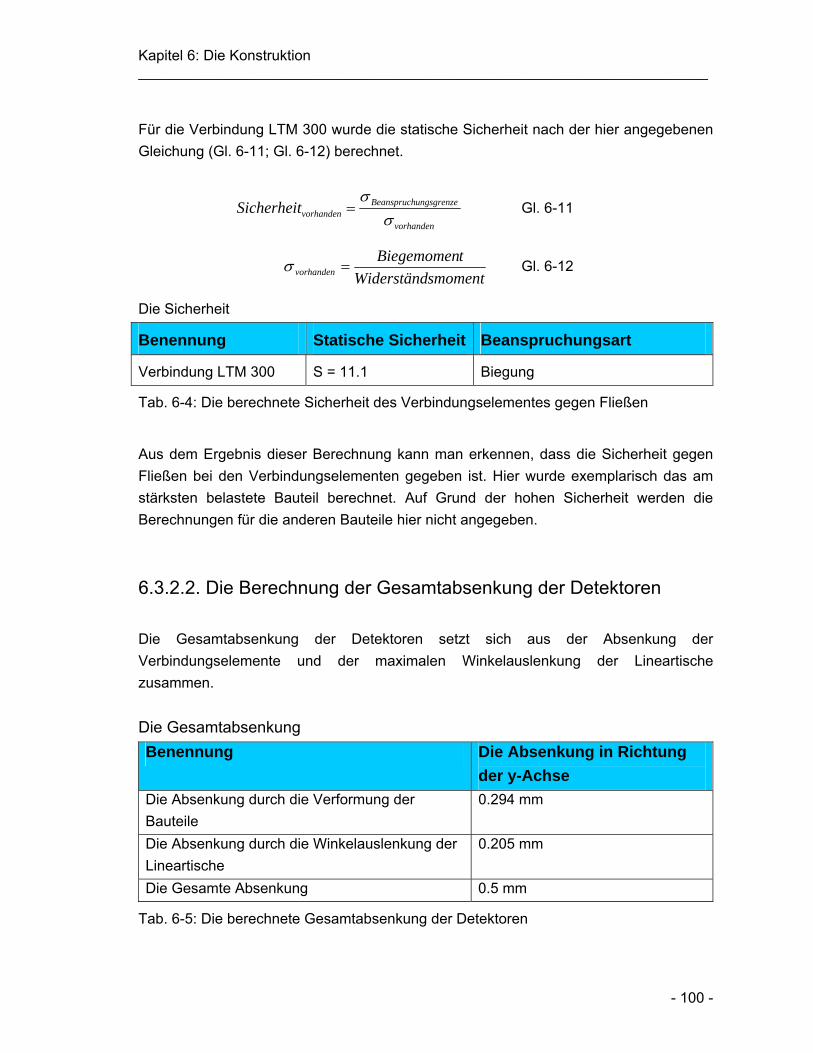
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 100 -
Für die Verbindung LTM 300 wurde die statische Sicherheit nach der hier angegebenen Gleichung (Gl. 6-11; Gl. 6-12) berechnet.
vorhanden
ungsgrenzeBeanspruchvorhandenSicherheit
σσ
= Gl. 6-11
smomentWiderständ
tBiegemomenvorhanden =σ Gl. 6-12
Die Sicherheit
Benennung Statische Sicherheit Beanspruchungsart
Verbindung LTM 300 S = 11.1 Biegung
Tab. 6-4: Die berechnete Sicherheit des Verbindungselementes gegen Fließen
Aus dem Ergebnis dieser Berechnung kann man erkennen, dass die Sicherheit gegen Fließen bei den Verbindungselementen gegeben ist. Hier wurde exemplarisch das am stärksten belastete Bauteil berechnet. Auf Grund der hohen Sicherheit werden die Berechnungen für die anderen Bauteile hier nicht angegeben.
6.3.2.2. Die Berechnung der Gesamtabsenkung der Detektoren Die Gesamtabsenkung der Detektoren setzt sich aus der Absenkung der Verbindungselemente und der maximalen Winkelauslenkung der Lineartische zusammen. Die Gesamtabsenkung Benennung Die Absenkung in Richtung
der y-Achse Die Absenkung durch die Verformung der Bauteile
0.294 mm
Die Absenkung durch die Winkelauslenkung der Lineartische
0.205 mm
Die Gesamte Absenkung 0.5 mm
Tab. 6-5: Die berechnete Gesamtabsenkung der Detektoren
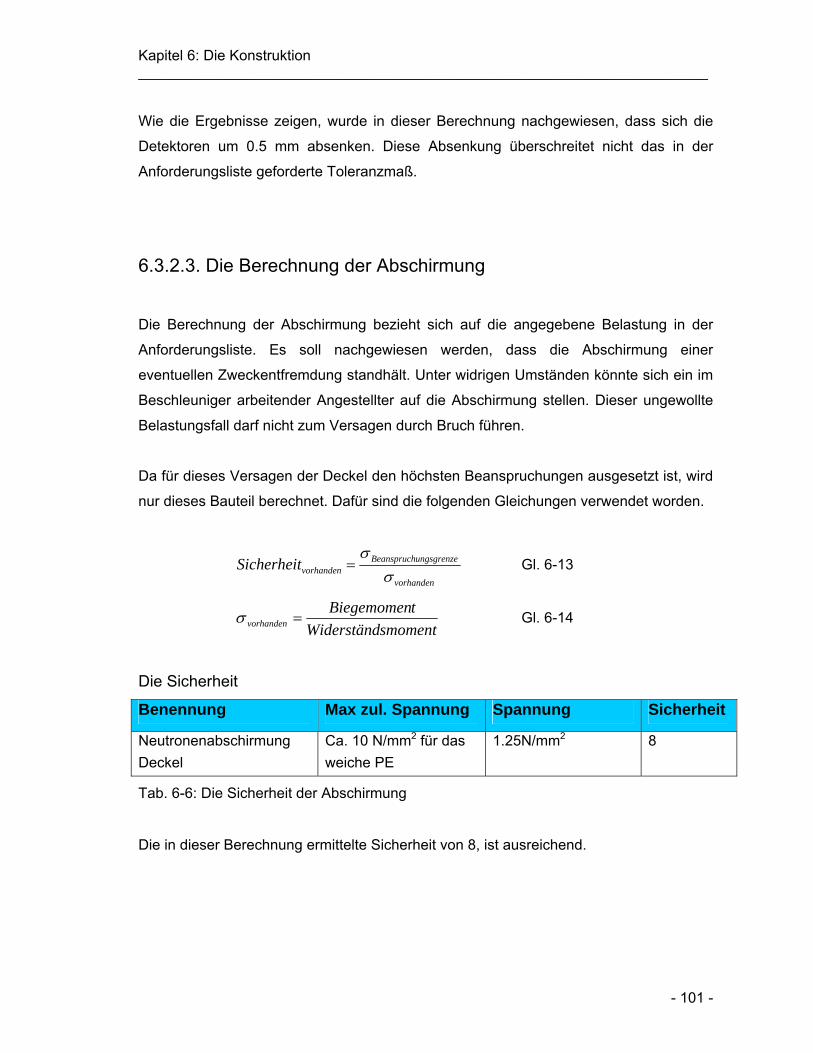
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 101 -
Wie die Ergebnisse zeigen, wurde in dieser Berechnung nachgewiesen, dass sich die
Detektoren um 0.5 mm absenken. Diese Absenkung überschreitet nicht das in der
Anforderungsliste geforderte Toleranzmaß.
6.3.2.3. Die Berechnung der Abschirmung
Die Berechnung der Abschirmung bezieht sich auf die angegebene Belastung in der
Anforderungsliste. Es soll nachgewiesen werden, dass die Abschirmung einer
eventuellen Zweckentfremdung standhält. Unter widrigen Umständen könnte sich ein im
Beschleuniger arbeitender Angestellter auf die Abschirmung stellen. Dieser ungewollte
Belastungsfall darf nicht zum Versagen durch Bruch führen.
Da für dieses Versagen der Deckel den höchsten Beanspruchungen ausgesetzt ist, wird
nur dieses Bauteil berechnet. Dafür sind die folgenden Gleichungen verwendet worden.
vorhanden
ungsgrenzeBeanspruchvorhandenSicherheit
σσ
= Gl. 6-13
smomentWiderständ
tBiegemomenvorhanden =σ Gl. 6-14
Die Sicherheit
Benennung Max zul. Spannung Spannung Sicherheit
Neutronenabschirmung Deckel
Ca. 10 N/mm2 für das weiche PE
1.25N/mm2 8
Tab. 6-6: Die Sicherheit der Abschirmung
Die in dieser Berechnung ermittelte Sicherheit von 8, ist ausreichend.

Kapitel 6: Die Konstruktion ______________________________________________________________________
- 102 -
6.3.2.4. Die Berechnung des Tragegestelles
Das Tragegestell wird auf die Knicksicherheit berechnet. Diese Berechnung ist wichtig,
da die Gesamtmasse des Monitors ca. 500 kg betragen wird. Außerdem kommt die
widrige Belastung von 150 kg hinzu. Bei dieser Berechnung liegt der Euler-Knickfall 2
vor. Die Befestigungspunkte der Querverbindungen und der Diagonalverbindungen des
Tragegestells werden bei dieser Berechnung vernachlässigt.
Die Sicherheit
Benennung kritische Gewichtskraft
Kritisches Gewicht
Sicherheit
Tragegestell 25039 N 2553 kg 3.9
Tab. 6-7: Die Sicherheit des Tragegestelles
Wie auch bei dieser Berechnung deutlich wird, ist die Dimensionierung des
Tragegestells ausreichend. Die Berechnung erfolgte dabei nach folgender Gleichung.
k
krit lIEF
*4**2π
= Gl. 6-15
Masse
kritvorhanden F
FSicherheit = Gl. 6-16
6.3.3. Die dynamischen Berechnungen
Das Kapitel der statischen Berechnungen hat gezeigt, dass durch die Eigenlasten keine
zu berücksichtigenden Verformungen an den Bauteilen auftreten und alle relevanten
Komponenten einen ausreichenden Sicherheitsbeiwert aufweisen. Nun müssen noch die
dynamischen Belastungen überprüft werden.
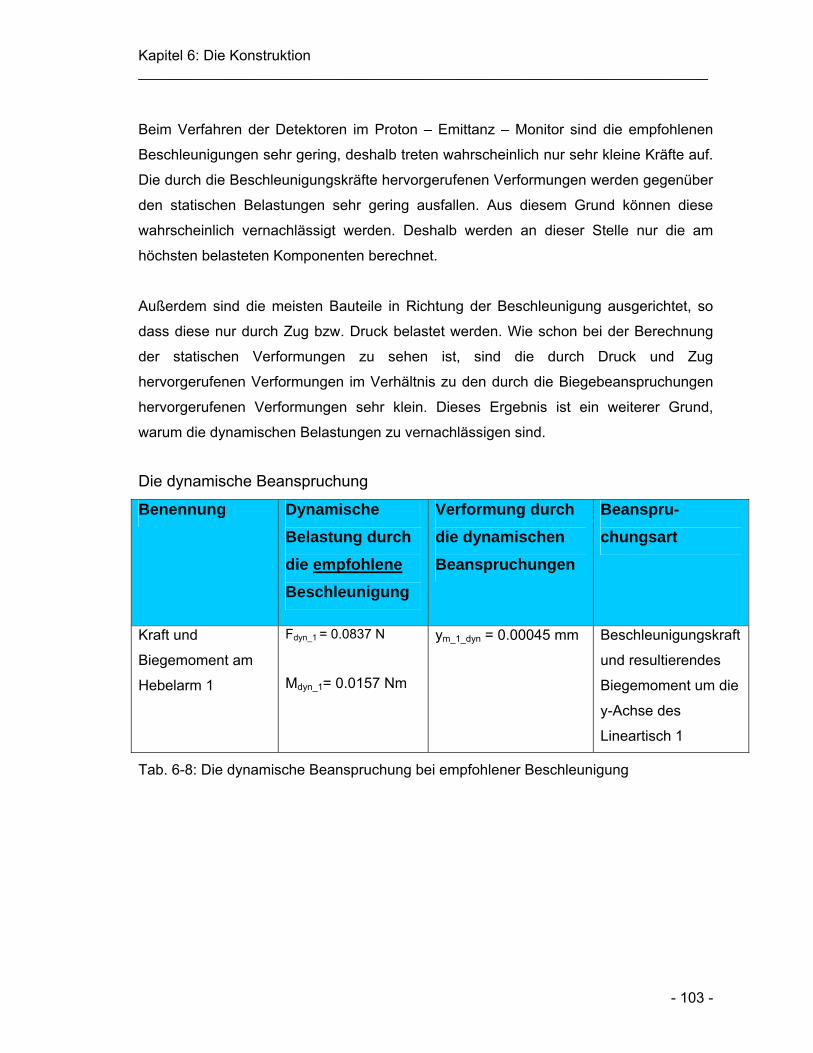
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 103 -
Beim Verfahren der Detektoren im Proton – Emittanz – Monitor sind die empfohlenen
Beschleunigungen sehr gering, deshalb treten wahrscheinlich nur sehr kleine Kräfte auf.
Die durch die Beschleunigungskräfte hervorgerufenen Verformungen werden gegenüber
den statischen Belastungen sehr gering ausfallen. Aus diesem Grund können diese
wahrscheinlich vernachlässigt werden. Deshalb werden an dieser Stelle nur die am
höchsten belasteten Komponenten berechnet.
Außerdem sind die meisten Bauteile in Richtung der Beschleunigung ausgerichtet, so
dass diese nur durch Zug bzw. Druck belastet werden. Wie schon bei der Berechnung
der statischen Verformungen zu sehen ist, sind die durch Druck und Zug
hervorgerufenen Verformungen im Verhältnis zu den durch die Biegebeanspruchungen
hervorgerufenen Verformungen sehr klein. Dieses Ergebnis ist ein weiterer Grund,
warum die dynamischen Belastungen zu vernachlässigen sind.
Die dynamische Beanspruchung
Benennung Dynamische Belastung durch die empfohlene Beschleunigung
Verformung durch die dynamischen Beanspruchungen
Beanspru-chungsart
Kraft und
Biegemoment am
Hebelarm 1
Fdyn_1 = 0.0837 N
Mdyn_1= 0.0157 Nm
ym_1_dyn = 0.00045 mm Beschleunigungskraft
und resultierendes
Biegemoment um die
y-Achse des
Lineartisch 1
Tab. 6-8: Die dynamische Beanspruchung bei empfohlener Beschleunigung

Kapitel 6: Die Konstruktion ______________________________________________________________________
- 104 -
Die dynamische Beanspruchung
Benennung Dynamische Belastung durch die maximale Beschleunigung
Verformung durch die dynamischen Beanspruchungen
Beanspru-chungsart
Kraft und
Biegemoment am
Hebelarm 1
Fdyn_1 = 34.65 N
Mdyn_1= 6.5 Nm
ym_1_dyn = 0.1865 mm Beschleunigungskraft
und resultierendes
Biegemoment um die
y-Achse des
Lineartisch 1
Tab. 6-9: Die dynamischen Beanspruchung bei maximaler Beschleunigung
Die Berechnung zeigt, dass die Kräfte und die Verformungen bei empfohlener
Beschleunigung zu vernachlässigen sind. Im Gegensatz zu den Kräften und den
Verformungen, die durch die maximale Beschleunigung hervorgerufen werden. Deshalb
wird ausdrücklich darauf hingewiesen, dass die Beschleunigung zu begrenzen ist.
6.3.4. Die Berechnung des Temperatureinflusses
Da in dem Beschleunigertunnel höhere Temperaturen zu erwarten sind, als im Bereich
der normalen Laborumgebung, muss überprüft werden, ob die dadurch entstehende
Längenänderungen der Bauteile einen Einfluss auf die Funktionalität der Positionierung
der Detektoren hat. Bei der Berechnung wird nur die eindimensionale Längenänderung
in Richtung der x- Achse berücksichtigt, weil diese die Ausschlaggebende ist. Es wird
davon ausgegangen, dass die Temperatur in der Fertigung bei Raumtemperatur liegt.
Das entspricht einer Temperatur von 20°C. Im Bereich des Beschleunigertunnels
werden höhere Temperaturen erwartet. Da die betreffenden Bauteile sich innerhalb der
Abschirmung befinden und diese durch Peltier – Kühlelemente klimatisiert wird, ist von
einer inneren Temperatur der Abschirmung von maximal 50°C auszugehen. Diese
Temperatur sollte nicht überschritten werden, da sonst die Detektoren Schaden nehmen
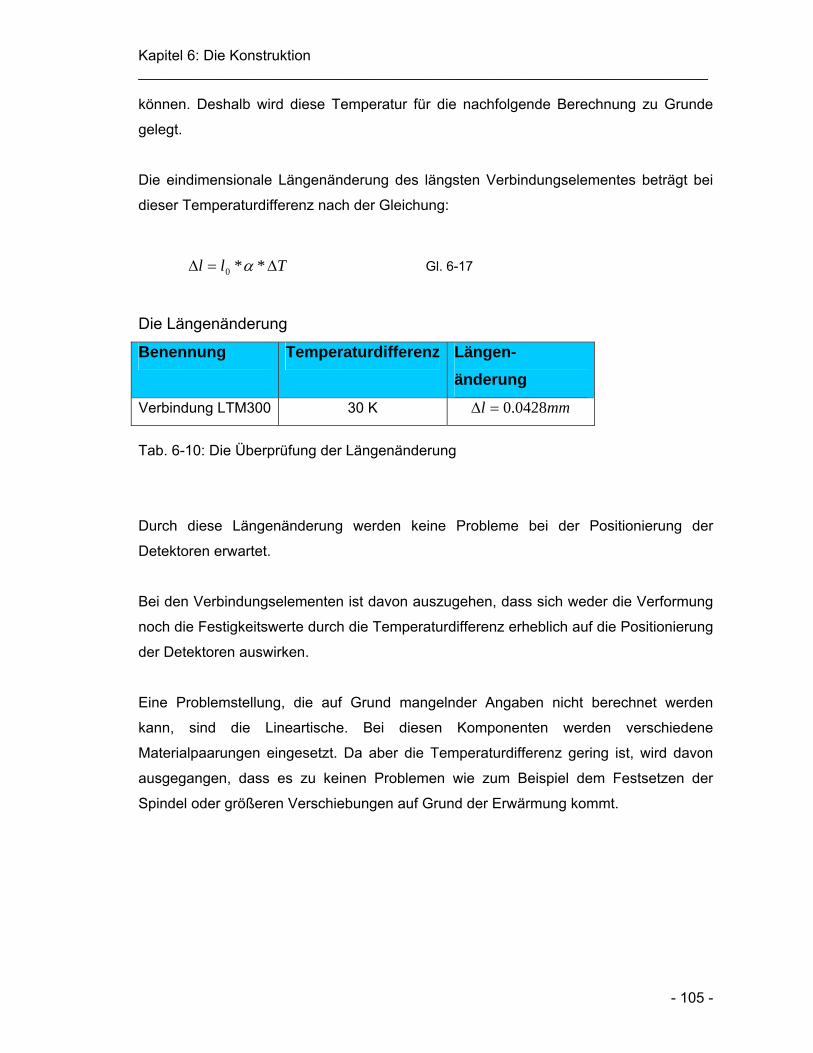
Kapitel 6: Die Konstruktion ______________________________________________________________________
- 105 -
können. Deshalb wird diese Temperatur für die nachfolgende Berechnung zu Grunde
gelegt.
Die eindimensionale Längenänderung des längsten Verbindungselementes beträgt bei
dieser Temperaturdifferenz nach der Gleichung:
Tll Δ=Δ **0 α Gl. 6-17
Die Längenänderung
Benennung Temperaturdifferenz Längen- änderung
Verbindung LTM300 30 K mml 0428.0=Δ
Tab. 6-10: Die Überprüfung der Längenänderung
Durch diese Längenänderung werden keine Probleme bei der Positionierung der
Detektoren erwartet.
Bei den Verbindungselementen ist davon auszugehen, dass sich weder die Verformung
noch die Festigkeitswerte durch die Temperaturdifferenz erheblich auf die Positionierung
der Detektoren auswirken.
Eine Problemstellung, die auf Grund mangelnder Angaben nicht berechnet werden
kann, sind die Lineartische. Bei diesen Komponenten werden verschiedene
Materialpaarungen eingesetzt. Da aber die Temperaturdifferenz gering ist, wird davon
ausgegangen, dass es zu keinen Problemen wie zum Beispiel dem Festsetzen der
Spindel oder größeren Verschiebungen auf Grund der Erwärmung kommt.
Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 106 -
7. Die Produktdokumentation
Dieses Kapitel soll einen abschließenden Blick auf die konstruierte Nachweisende
Funktionsgruppe geben. Hier werden zum Teil die Fertigungsunterlagen dargestellt und
neben der Montageanleitung die zum Betrieb erforderliche Betriebsanweisung. Auf die
Darstellung der technischen Zeichnungen wird aus Platzgründen verzichtet. Eine
isometrische Ansicht der Bauteile ist an dieser Stelle ausreichend, um einen Überblick
über die Form und Ausdehnung der Bauteile und Komponenten zu bekommen. Eine
ebenfalls isometrische Ansicht einer Baugruppe soll einen Ausblick über den Umfang
und die Funktionsweise der Baugruppe geben. Exemplarisch wird nur eine der
Stücklisten für eine Baugruppe abgebildet.
7.1. Die Fertigungsunterlagen
Zu den Fertigungsunterlagen gehören neben den Einzelteilzeichnungen und den
Baugruppenzeichnungen auch die Stücklisten. Wie in der Einleitung dieses Kapitels
erwähnt, wird auf die vollständige Abbildung dieser Unterlagen verzichtet. Die
Einzelteilzeichnungen, Baugruppenzeichnungen und Stücklisten sind dem Anhang
beigefügt.
7.1.1. Die Abbildung der Bauteile
In diesem Abschnitt werden exemplarisch die verwendeten Bauteile der
Neutronenabschirmung einmalig abgebildet. Es wurden zur besseren Übersicht
verschiedene Ansichten gewählt. Aus Darstellungsgründen können keine Angaben zu
den Maßstäben gemacht werden. Deshalb sind die realen Größenverhältnisse den
technischen Zeichnungen im Anhang zu entnehmen. Diese Abbildungen dienen dem
besseren Verständnis und sind keine normgerechten Fertigungsunterlagen.

Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 107 -
Die Bauteile der Neutronenabschirmung
Bauteile der Baugruppe A: Die Neutronenabschirmung Blatt 1 von 3
Abb. 7-1: Die isometrische Ansicht des Bodens
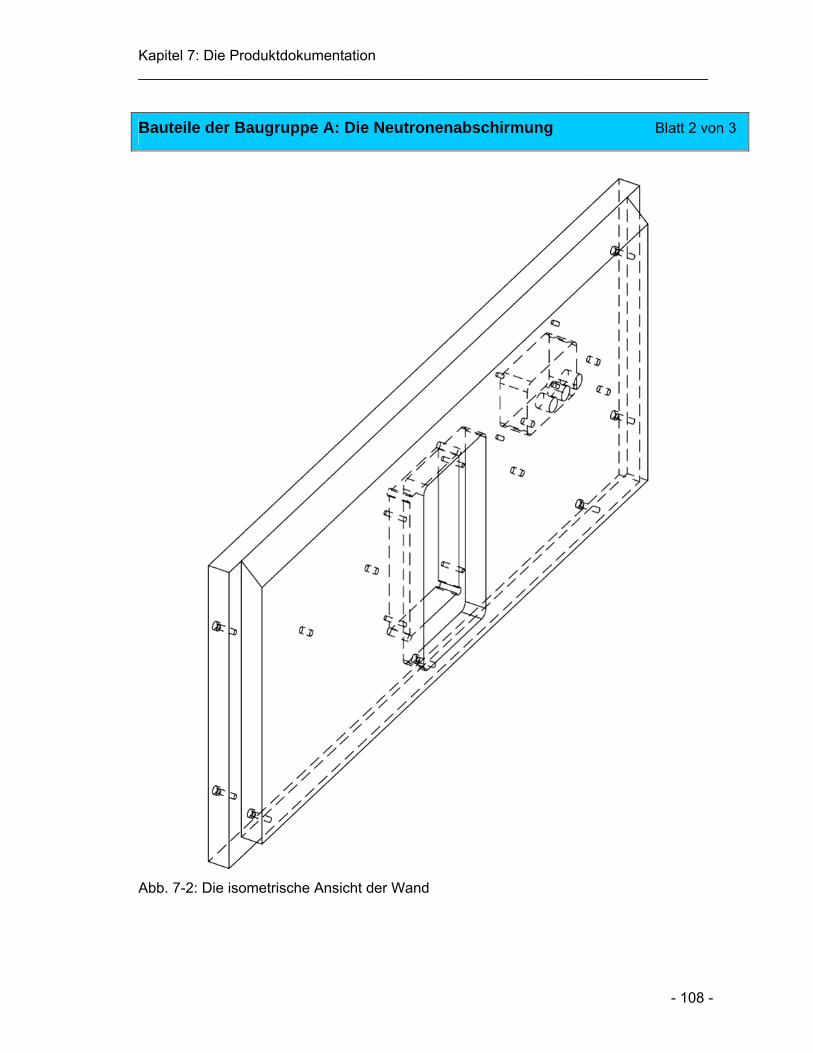
Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 108 -
Bauteile der Baugruppe A: Die Neutronenabschirmung Blatt 2 von 3
Abb. 7-2: Die isometrische Ansicht der Wand
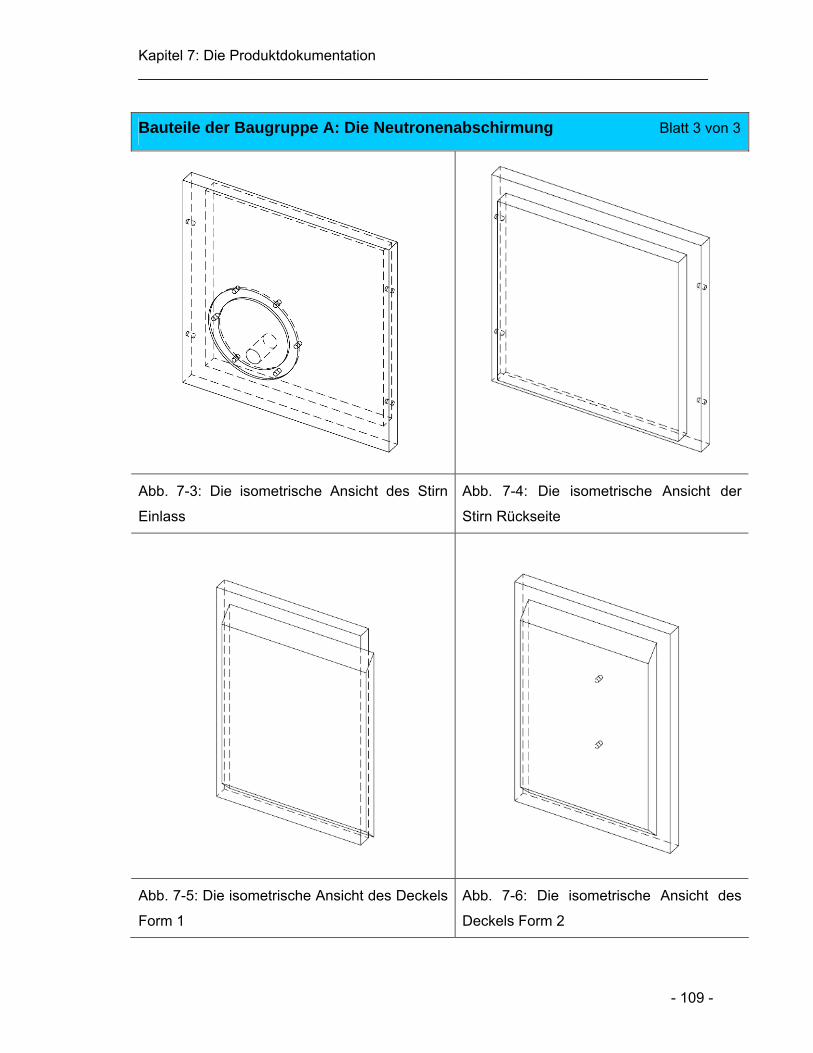
Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 109 -
Bauteile der Baugruppe A: Die Neutronenabschirmung Blatt 3 von 3
Abb. 7-3: Die isometrische Ansicht des Stirn
Einlass
Abb. 7-4: Die isometrische Ansicht der
Stirn Rückseite
Abb. 7-5: Die isometrische Ansicht des Deckels
Form 1
Abb. 7-6: Die isometrische Ansicht des
Deckels Form 2
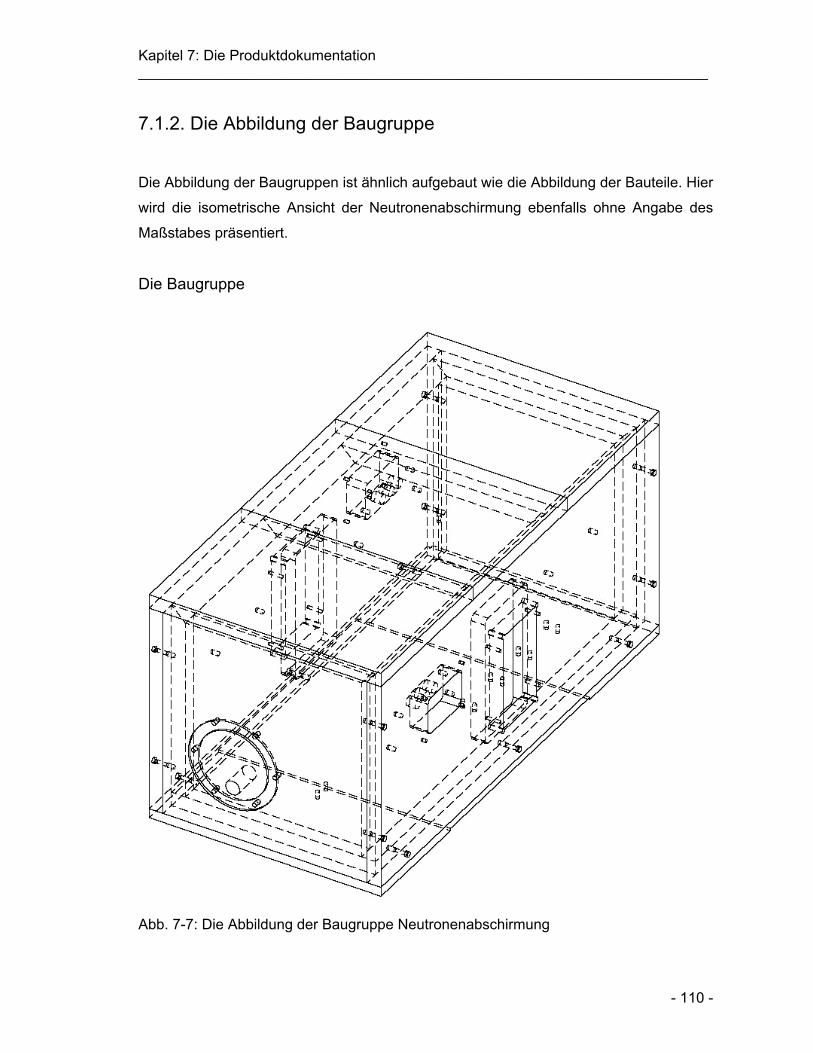
Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 110 -
7.1.2. Die Abbildung der Baugruppe
Die Abbildung der Baugruppen ist ähnlich aufgebaut wie die Abbildung der Bauteile. Hier
wird die isometrische Ansicht der Neutronenabschirmung ebenfalls ohne Angabe des
Maßstabes präsentiert.
Die Baugruppe
Abb. 7-7: Die Abbildung der Baugruppe Neutronenabschirmung

Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 111 -
7.1.3. Die Stückliste
Stellvertretend für alle Stücklisten wird hier die Stückliste der Baugruppe Positionierung abgebildet. Diese ist sehr zweckmäßig, da in dieser die verschiedenen Materialarten aufgeführt werden, wie Bauteile, Normteile und Kaufteile. Die Stückliste
Abb. 7-8: Die Stückliste der Baugruppe Positionierung
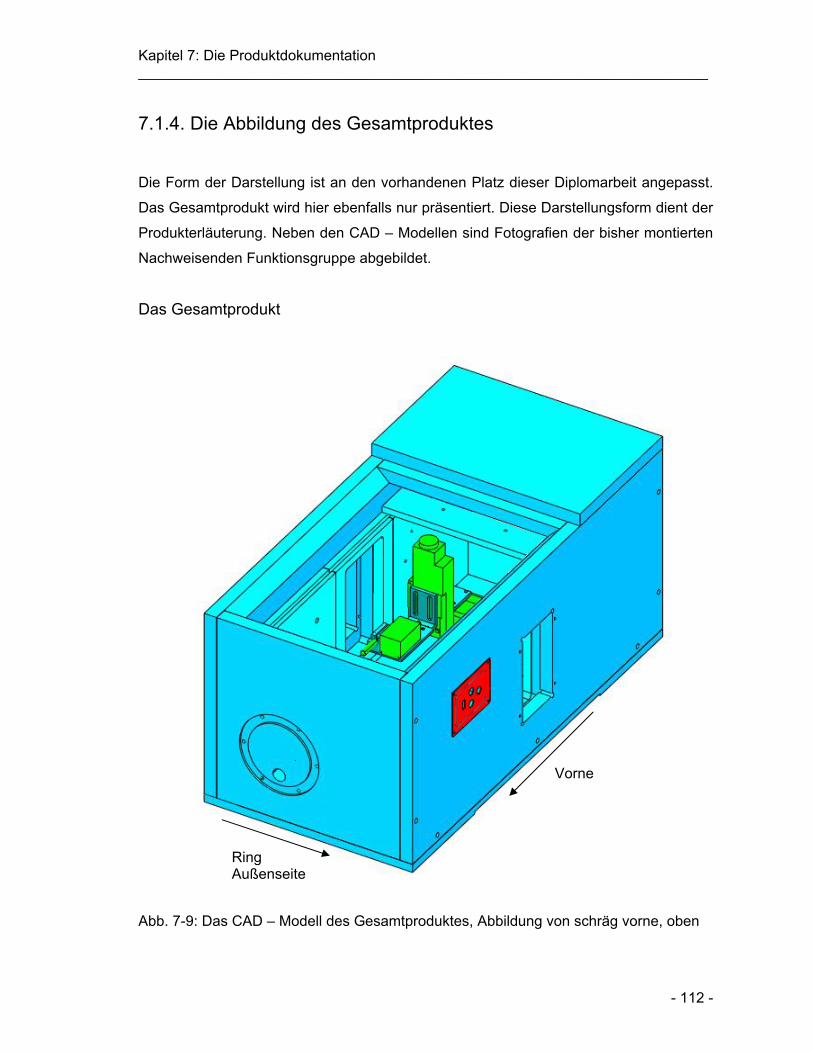
Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 112 -
7.1.4. Die Abbildung des Gesamtproduktes
Die Form der Darstellung ist an den vorhandenen Platz dieser Diplomarbeit angepasst.
Das Gesamtprodukt wird hier ebenfalls nur präsentiert. Diese Darstellungsform dient der
Produkterläuterung. Neben den CAD – Modellen sind Fotografien der bisher montierten
Nachweisenden Funktionsgruppe abgebildet.
Das Gesamtprodukt
Abb. 7-9: Das CAD – Modell des Gesamtproduktes, Abbildung von schräg vorne, oben
Ring Außenseite
Vorne
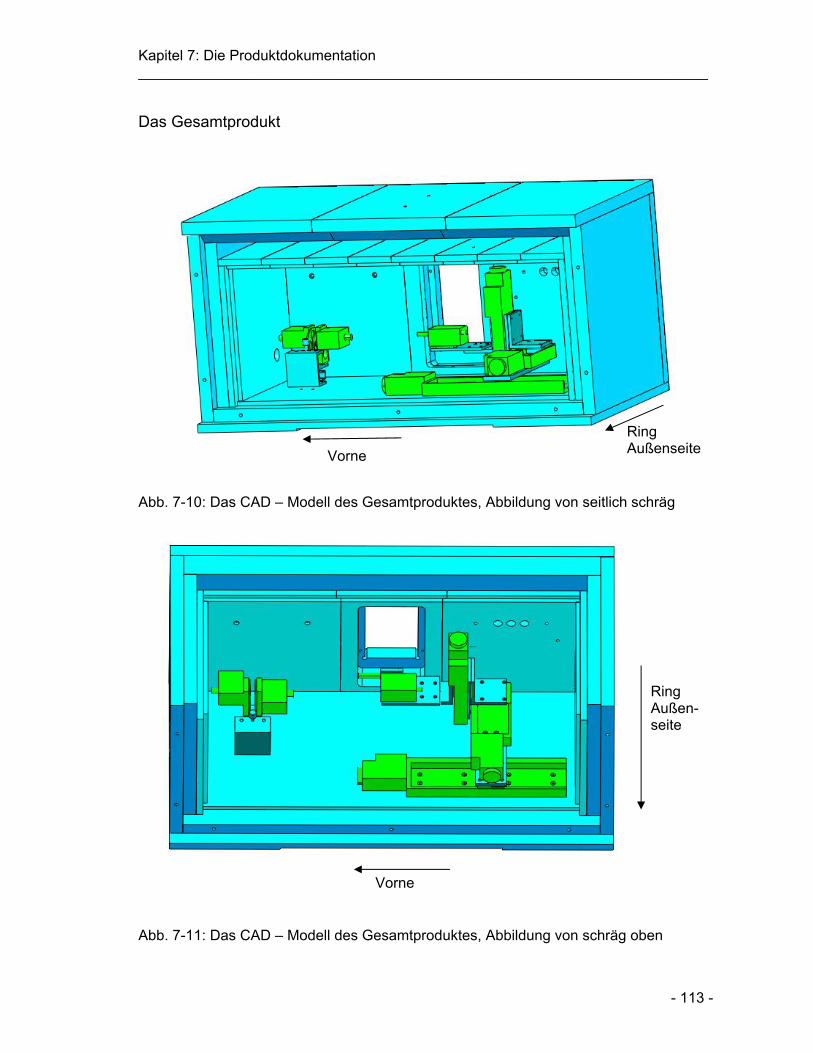
Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 113 -
Das Gesamtprodukt
Abb. 7-10: Das CAD – Modell des Gesamtproduktes, Abbildung von seitlich schräg
Abb. 7-11: Das CAD – Modell des Gesamtproduktes, Abbildung von schräg oben
Ring Außenseite
Vorne
Ring Außen-seite
Vorne
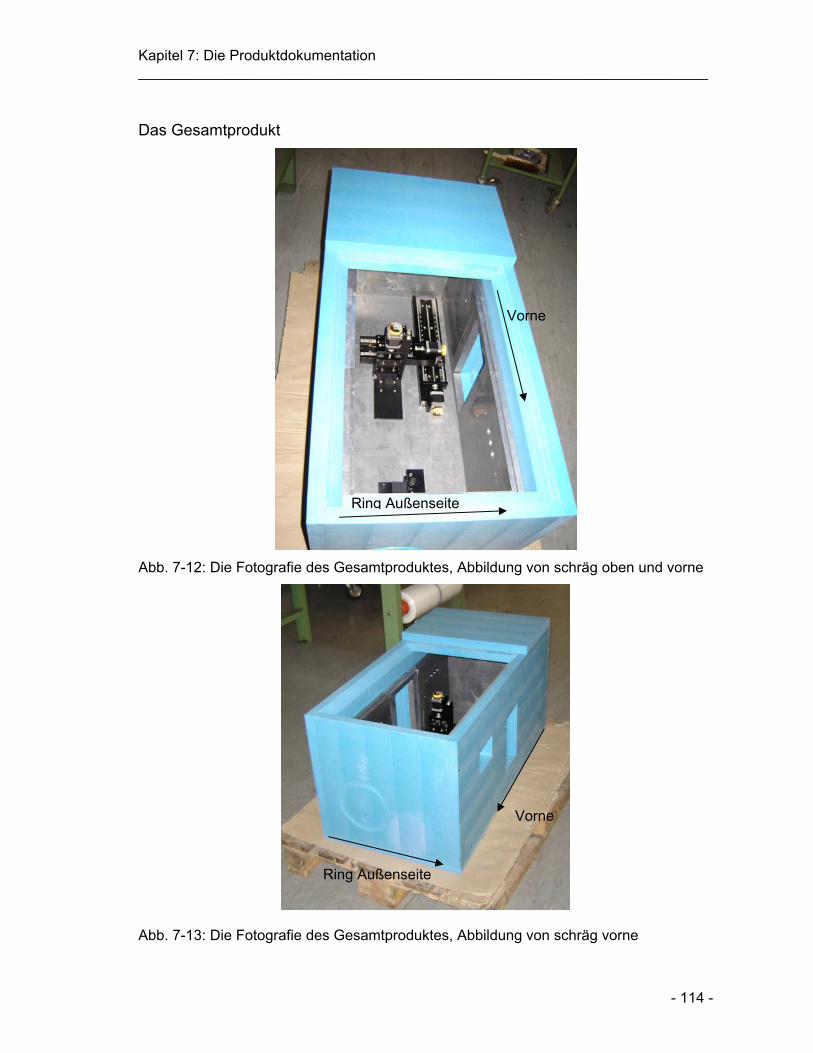
Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 114 -
Das Gesamtprodukt
Abb. 7-12: Die Fotografie des Gesamtproduktes, Abbildung von schräg oben und vorne
Abb. 7-13: Die Fotografie des Gesamtproduktes, Abbildung von schräg vorne
Ring Außenseite
Vorne
Vorne
Ring Außenseite
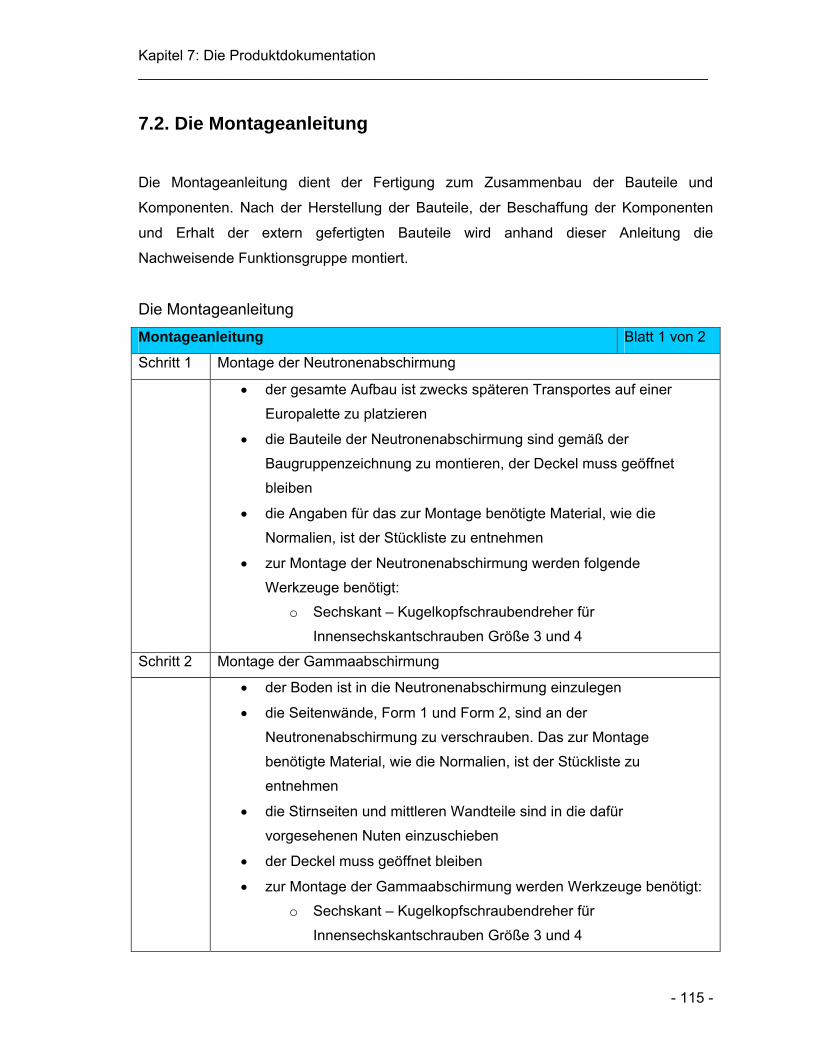
Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 115 -
7.2. Die Montageanleitung
Die Montageanleitung dient der Fertigung zum Zusammenbau der Bauteile und
Komponenten. Nach der Herstellung der Bauteile, der Beschaffung der Komponenten
und Erhalt der extern gefertigten Bauteile wird anhand dieser Anleitung die
Nachweisende Funktionsgruppe montiert.
Die Montageanleitung
Montageanleitung Blatt 1 von 2
Schritt 1 Montage der Neutronenabschirmung
• der gesamte Aufbau ist zwecks späteren Transportes auf einer
Europalette zu platzieren
• die Bauteile der Neutronenabschirmung sind gemäß der
Baugruppenzeichnung zu montieren, der Deckel muss geöffnet
bleiben
• die Angaben für das zur Montage benötigte Material, wie die
Normalien, ist der Stückliste zu entnehmen
• zur Montage der Neutronenabschirmung werden folgende
Werkzeuge benötigt:
o Sechskant – Kugelkopfschraubendreher für
Innensechskantschrauben Größe 3 und 4
Schritt 2 Montage der Gammaabschirmung
• der Boden ist in die Neutronenabschirmung einzulegen
• die Seitenwände, Form 1 und Form 2, sind an der
Neutronenabschirmung zu verschrauben. Das zur Montage
benötigte Material, wie die Normalien, ist der Stückliste zu
entnehmen
• die Stirnseiten und mittleren Wandteile sind in die dafür
vorgesehenen Nuten einzuschieben
• der Deckel muss geöffnet bleiben
• zur Montage der Gammaabschirmung werden Werkzeuge benötigt:
o Sechskant – Kugelkopfschraubendreher für
Innensechskantschrauben Größe 3 und 4

Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 116 -
Montageanleitung Blatt 2 von 2
Schritt 3 Montage der Positionierungseinheit und der Filterräder • die Positionierungseinheit ist gemäß der Baugruppenzeichnung zu
montieren, der Hubtisch für die Filterräder ebenfalls • nach Abschluss der Montage beider Baugruppen sind diese in der
Abschirmung in die dafür vorgesehenen Bohrungen zu befestigen • zur Montage der Positionierungseinheit und des Hubtisches werden
folgende Werkzeuge benötigt: o Sechskant – Kugelkopfschraubendreher für
Innensechskantschrauben Größe 3 und 4 Schritt 4 Montage der Anbauteile • die Anbauteile sind mit den vorgesehenen Steckern zu bestücken,
diese sind der Stückliste zu entnehmen, die Position der Stecker ist in der Bauteilzeichnung ersichtlich
• die Energieleitungen und Signalleitungen sind in die dafür vorgesehenen Öffnungen einzuführen
• die Anbauteile sind außerhalb und innerhalb der Abschirmung an den vorgegebenen Positionen anzubringen und mit den entsprechenden Leitungen zu verbinden
• zur Montage werden folgende Werkzeuge benötigt: o Sechskant – Kugelkopfschraubendreher für
Innensechskantschrauben Größe 3 und 4 Schritt 5 Abschließende Montage • die Griffe sind an den dafür vorgesehenen Deckeln zu montieren
• zur Montage der Griffe werden folgende Werkzeuge benötigt: o Sechskant – Kugelkopfschraubendreher für
Innensechskantschrauben Größe 3 und 4 • die Deckel der Gammaabschirmung sind einzulegen, hierfür werden
keine Werkzeuge benötigt • die Deckel der Neutronenabschirmung sind einzulegen, hierfür
werden ebenfalls keine Werkzeuge benötigt Schritt 6 Transportvorbereitung • die montierte Nachweisende Funktionsgruppe ist auf der
Europalette transportsicher zu befestigen
Tab. 7-1: Die Montageanleitung für die Nachweisende Funktionsgruppe
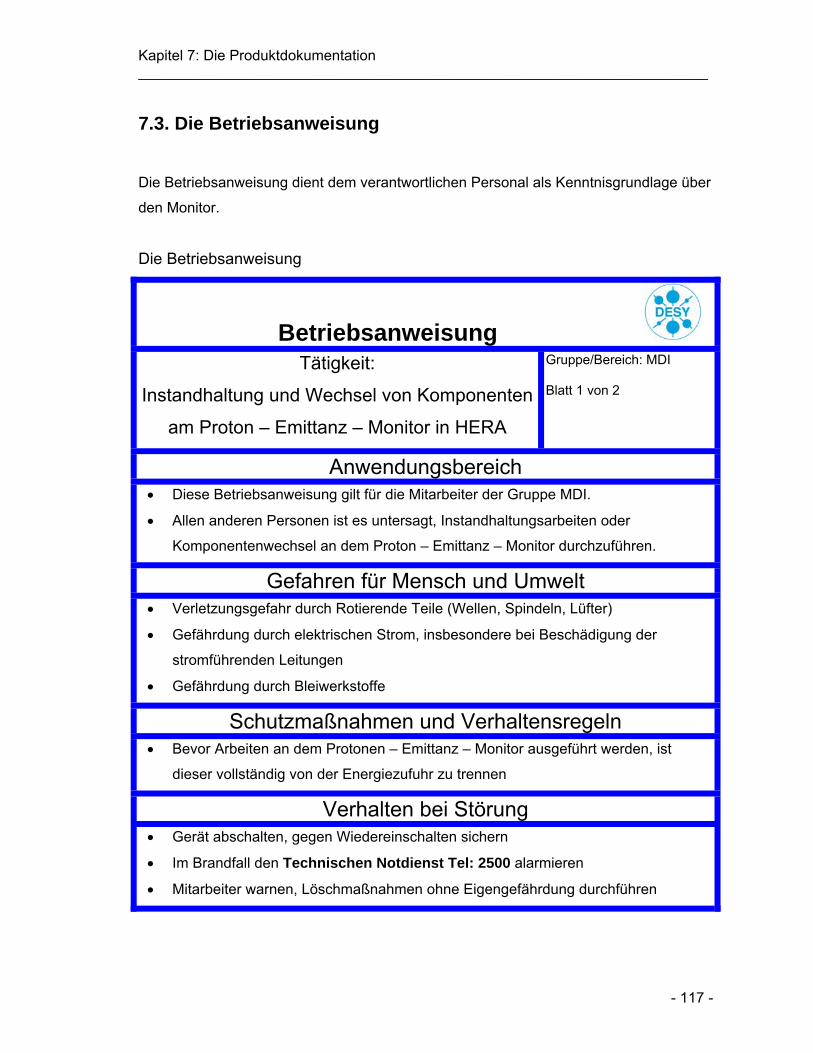
Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 117 -
7.3. Die Betriebsanweisung
Die Betriebsanweisung dient dem verantwortlichen Personal als Kenntnisgrundlage über
den Monitor.
Die Betriebsanweisung
Betriebsanweisung Tätigkeit:
Instandhaltung und Wechsel von Komponenten
am Proton – Emittanz – Monitor in HERA
Gruppe/Bereich: MDI Blatt 1 von 2
Anwendungsbereich • Diese Betriebsanweisung gilt für die Mitarbeiter der Gruppe MDI.
• Allen anderen Personen ist es untersagt, Instandhaltungsarbeiten oder
Komponentenwechsel an dem Proton – Emittanz – Monitor durchzuführen.
Gefahren für Mensch und Umwelt • Verletzungsgefahr durch Rotierende Teile (Wellen, Spindeln, Lüfter)
• Gefährdung durch elektrischen Strom, insbesondere bei Beschädigung der
stromführenden Leitungen
• Gefährdung durch Bleiwerkstoffe
Schutzmaßnahmen und Verhaltensregeln • Bevor Arbeiten an dem Protonen – Emittanz – Monitor ausgeführt werden, ist
dieser vollständig von der Energiezufuhr zu trennen
Verhalten bei Störung • Gerät abschalten, gegen Wiedereinschalten sichern
• Im Brandfall den Technischen Notdienst Tel: 2500 alarmieren
• Mitarbeiter warnen, Löschmaßnahmen ohne Eigengefährdung durchführen
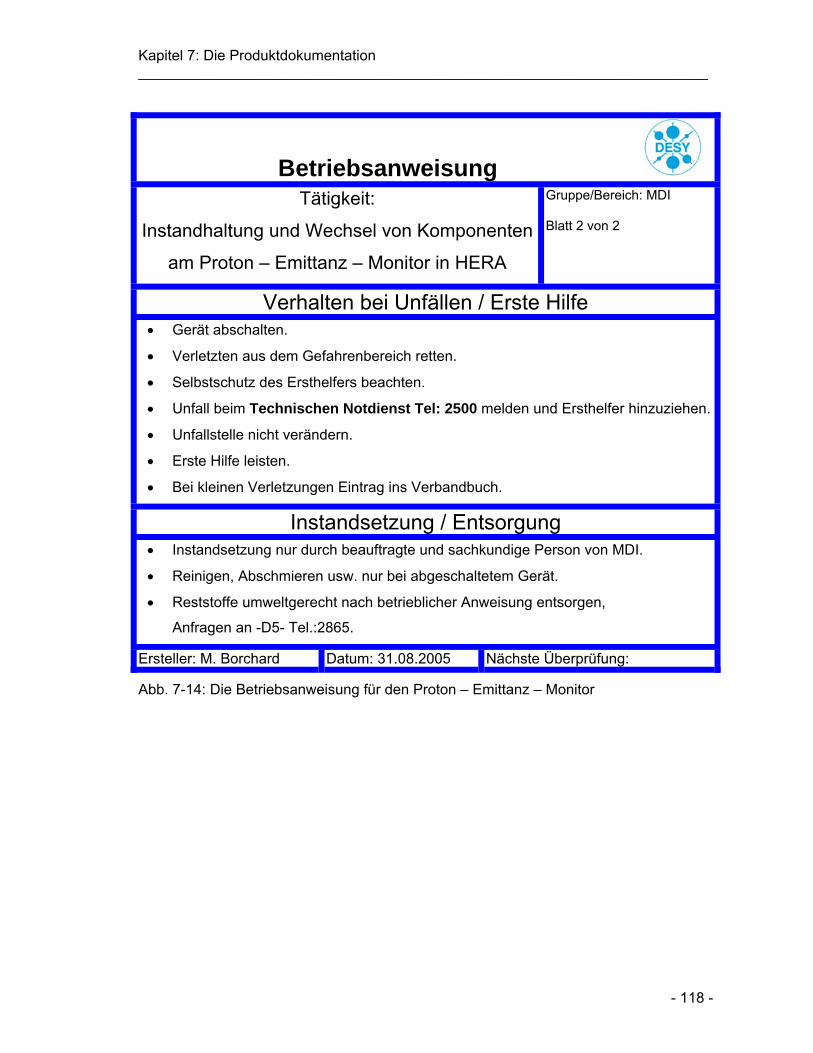
Kapitel 7: Die Produktdokumentation ______________________________________________________________________
- 118 -
Betriebsanweisung Tätigkeit:
Instandhaltung und Wechsel von Komponenten
am Proton – Emittanz – Monitor in HERA
Gruppe/Bereich: MDI Blatt 2 von 2
Verhalten bei Unfällen / Erste Hilfe • Gerät abschalten.
• Verletzten aus dem Gefahrenbereich retten.
• Selbstschutz des Ersthelfers beachten.
• Unfall beim Technischen Notdienst Tel: 2500 melden und Ersthelfer hinzuziehen.
• Unfallstelle nicht verändern.
• Erste Hilfe leisten.
• Bei kleinen Verletzungen Eintrag ins Verbandbuch.
Instandsetzung / Entsorgung • Instandsetzung nur durch beauftragte und sachkundige Person von MDI.
• Reinigen, Abschmieren usw. nur bei abgeschaltetem Gerät.
• Reststoffe umweltgerecht nach betrieblicher Anweisung entsorgen,
Anfragen an -D5- Tel.:2865.
Ersteller: M. Borchard Datum: 31.08.2005 Nächste Überprüfung:
Abb. 7-14: Die Betriebsanweisung für den Proton – Emittanz – Monitor

Kapitel 8: Das Fazit und Ausblick ______________________________________________________________________
- 119 -
8. Fazit und Ausblick Die konstruierte Nachweisende Funktionsgruppe erfüllt die an sie gestellten Anforderungen hinsichtlich der Qualität und der Funktionalität vollständig. Als Qualität ist hier die Verbesserung der Abbildungsqualität, die Lichtundurchlässigkeit, die geometrischen Abmessungen und die ausgewählten Herstellungsverfahren sowie die Montierbarkeit zu betrachten. Die Funktionalität beschreibt das Verfahren der Detektoren unter den geforderten Toleranzbedingungen und Wegstrecken, die Bereitstellung der Filter sowie die online Signalübertragung. Der Einbau in den Teilchenbeschleuniger HERA kann, wie geplant, während des Shutdowns9 im November stattfinden. Die durch den Monitor erwartete Effizienzsteigerung setzt sich aus folgenden Faktoren zusammen: Erstens verkürzt sich die Ermittlung der optimalen Detektorpositionen und der dafür benötigten Einstellzeit um ca. 40 Minuten. Zweitens wird hinsichtlich der Filterauswahl und Anzahl der zur Verfügung stehenden Filter die zum Wechseln der Filter benötigte Zeit um ca. 30 Minuten reduziert. Drittens wird es durch die Fernsteuerbarkeit des Systems nun möglich, alle nötigen Einstellungen der Detektoren und Filter online, während des Beschleunigerbetriebs, durchzuführen. Dies war zuvor nicht möglich und musste an Wartungstagen10 umgesetzt werden. Durch diese drei Faktoren wird eine geldliche Einsparung in fünfstelliger Höhe pro Jahr erwartet. Das Verbesserungspotential des Protonen – Emittanz – Monitors ist zum Teil in der Schnittstelle zwischen der Optischen Funktionsgruppe und der Nachweisenden Funktionsgruppe vorhanden. Die Aufhängung der lichtundurchlässigen Strahlzuführung und die entsprechenden Verbindungsflansche zwischen den Rohrteilstücken weisen noch Verbesserungspotential hinsichtlich der Lichtundurchlässigkeit und der Montierbarkeit bei Wartungsarbeiten auf. Ein weiterer Punkt, welcher einer Optimierung unterzogen werden kann, ist die Reduzierung Freiheitsgrade des Gesamtsystems. In der Optischen Funktionsgruppe werden zur Strahlumlenkung bewegliche Spiegelgruppen eingesetzt. Dadurch besitzt das Gesamtsystem erhebliche Freiheitsgrade. Diese führen zu einer unnötig hohen Justagekomplexität, da die Funktion der drehbar gelagerten Spiegel zum Teil durch die Funktionserweiterung der Nachweisenden Funktionsgruppe übernommen wurde.
9 Jährlicher auftretender Zeitraum in dem der Beschleuniger für Wartungs- und Installationsarbeiten abgeschaltet wird. Dauer ca. 2-3 Monate 10 Monatlich auftretender Wartungstag zur Wartung der Maschine und der Geräte. Dauer max 24 Std.

- 120 -

Kapitel V: Das Quellenverzeichnis ______________________________________________________________________
- 121 -
V. Quellenverzeichnis [1] Vgl.: http://www.desy.de/html/ueberdesy/ueber1.html
[2] Vgl.: http://www.desy.de/html/forschung/forschung.html
[3] Vgl.: http://desyntwww.desy.de/mdi/
[4] Vgl.: http://www.desy.de/html/forschung/teilchenbeschleuniger.html
[5] K. Wille / Physik der Teilchenbeschleuniger und Synchrotronstrahlungsquellen /
Teubner 1992 / S.35
[6] http://de.wikipedia.org/wiki/Synchrotronstrahlung
[7]Vgl.: Wladimir Hain / Neutronenabschirmung in HERA / DESY PKTR-Note: 43
[8]Vgl.: Eugen Sauter / Grundlagen des Strahlenschutzes / Siemens AG 1971
[9] Gerhard Pahl ,Wolfgang Beitz / Konstruktionslehre, Methoden und Anwendung / 4.
Auflage1997 / Springer Verlag / S. 167 ff
[10] Gerhard Pahl ,Wolfgang Beitz / Konstruktionslehre, Methoden und Anwendung / 4.
Auflage1997 / Springer Verlag / S. 201 ff
[11] Klaus Ehrlenspiel / Integrierte Produktentwicklung / 2. Auflage 2003 / Hanser Verlag
/ S.456
[12] Klaus Ehrlenspiel / Integrierte Produktentwicklung / 2. Auflage 2003 / Hanser Verlag
/ S. 458
[13] Erich Rummich / Elektrische Schrittmotoren und –antriebe / expert Verlag /
2.Auflage / S.100 ff
Kapitel V: Das Quellenverzeichnis ______________________________________________________________________
- 122 -
[14] Herbet Bernstein / Sensoren und Messelektronik / Pflaum Verlag, 1998/ S. 227
[15] Horst Engels / CAN – Bus / Franzis` Verlag GmbH 2000
[16] S. O. Flynckt, C. Mormonier / Photomultiplier tubes / Principles and applications /
Photonics September 2002
[17] Horst Kuchling / Taschenbuch der Physik / 16. Auflage 1996 / Fachbuchverlag
Leipzig / S. 490
[18] Roloff / Matek / Maschinenelemente / 15. Auflage, August 2001/ vieweg Verlag
[19] Jürgen Dankert und Helga Dankert / Technische Mechanik / 3. Auflage Januar 2004
/ Teubner Verlag
Kapitel VI: Der Anhang ______________________________________________________________________
- 123 -
VI. Anhang
Der Anhang befindet sich in dem beiliegenden Ordner oder auf der beiliegenden CD.
A. Der Anhang aus der Konzeptphase
a. Paarweiservergleich der Bewertungskriterien und Bewertung der Teilfunktionen und Unterfunktionen anhand der Bewertungskriterien
B. Der Anhang der Funktionsbeschreibung
a. Die Produktdokumentation der eingesetzten Komponenten und die entsprechenden Handbücher
C. Der Anhang der Konstruktion
a. Die Berechnungen der Komponenten und der Bauteile
D. Der Anhang der Produktdokumentation
a. Die Fertigungsunterlagen
Inhaltsverzeichnis des Anhangs Diplomarbeitsthema: Auslegung und Konstruktion eines Proton – Emittanz – Monitors Hamburg, September, 2005 Angaben in Klammern für die Daten-CD A Konzeptphase Die Bewertungskriterien (Anhang\A_Konzeptphase\Bewertung.pdf) Die Bewertung der Teil- und Unterfunktionen (Anhang\A_Konzeptphase\Bewertung.pdf) B Funktionsbeschreibung
Die Lineartische (Anhang\B_Funktionsbeschreibung\1_Die_OWIS_Podukte\LTM_80.pdf) Die Schrittmotoren
(Anhang\B_Funktionsbeschreibung\1_Die_OWIS_Podukte\st4018.pdf) (Anhang\B_Funktionsbeschreibung\1_Die_OWIS_Podukte\Nanotec-Kennlinie.pdf)
Die Filterräder C:\Borchard\privat_dateien\Abgabe\Anhang\B_Funktionsbeschreibung\ 1_Die_OWIS_Podukte\GHdt.pdf – Seite 70 / 71)
Die Endstufen (Anhang\B_Funktionsbeschreibung\2_Die Endstufen) Der Photomultiplier (Anhang\B_Funktionsbeschreibung\3_Der_Photomultiplier)
Die Kamera (Anhang\B_Funktionsbeschreibung\4_Die_Kamera)
Die Peltier – Elemente (Anhang\B_Funktionsbeschreibung\5_Die_Peltier) C Konstruktion Die Berechnung der Komponenten und Bauteile (Anhang\C_Konstruktionsphase\Mathcad_Berechnungen.pdf) D Produktdokumentation Baugruppe A: Neutronenabschirmung
(Anhang\D_Produktdokumentation\Baugr_A_Neutr) Baugruppe B: Gammaabschirmung (Anhang\D_Produktdokumentation\Baugr_B_Gamma) Baugruppe C: Positionierung (Anhang\D_Produktdokumentation\Baugr_C_Positi) Baugruppe D: Sensoren (Anhang\D_Produktdokumentation\Baugr_D_Sensor) Baugruppe E: Hubtisch (Anhang\D_Produktdokumentation\Baugr_E_Hubtisch) Baugruppe F: Anbauteile (Anhang\D_Produktdokumentation\Baugr_F_Anbauteile) Baugruppe G: Tragegestell (Anhang\D_Produktdokumentation\Baugr_G_Gestell)
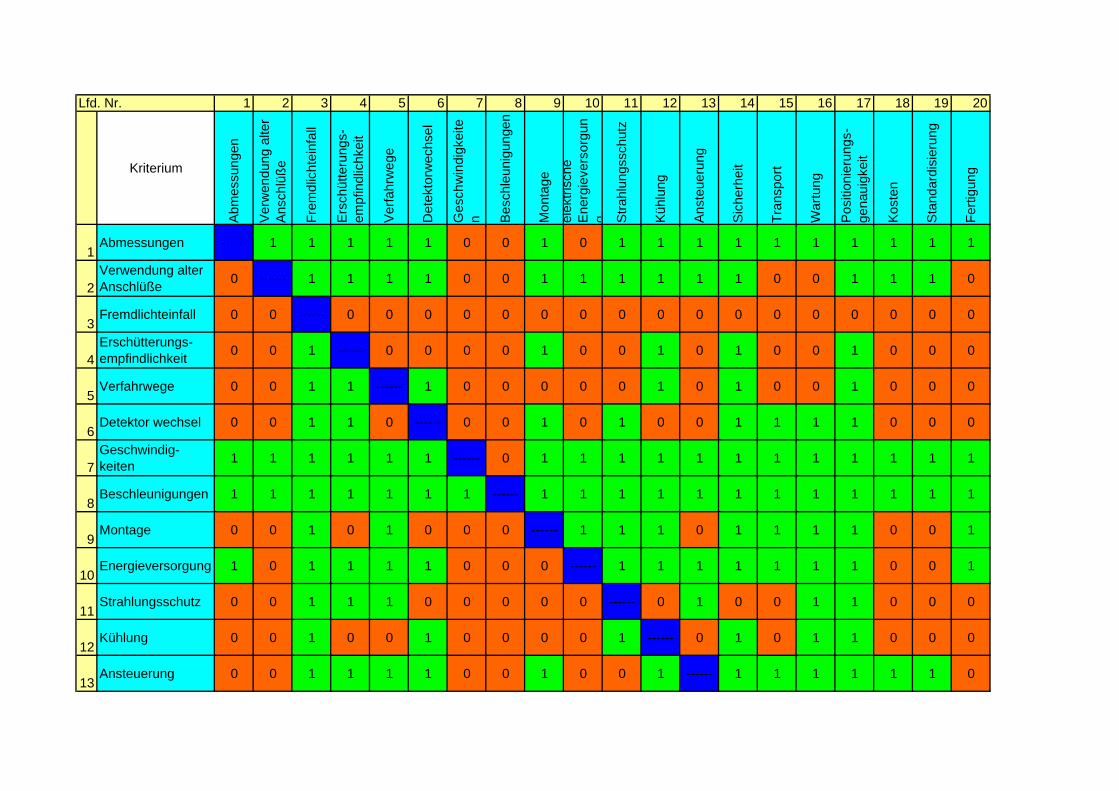
Lfd. Nr. 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
Kriterium
Abm
essu
ngen
Verw
endu
ng a
lter
Ansc
hlüß
e
Frem
dlic
htei
nfal
l
Ersc
hütte
rung
s-
empf
indl
ichk
eit
Verfa
hrw
ege
Det
ekto
rwec
hsel
Ges
chw
indi
gkei
ten Be
schl
euni
gung
en
Mon
tage
elek
trisc
he
Ener
giev
erso
rgun
g Stra
hlun
gssc
hutz
Kühl
ung
Anst
euer
ung
Sich
erhe
it
Tran
spor
t
War
tung
Posi
tioni
erun
gs-
gena
uigk
eit
Kost
en
Stan
dard
isie
rung
Ferti
gung
1Abmessungen ------ 1 1 1 1 1 0 0 1 0 1 1 1 1 1 1 1 1 1 1
2Verwendung alter Anschlüße 0 ------ 1 1 1 1 0 0 1 1 1 1 1 1 0 0 1 1 1 0
3Fremdlichteinfall 0 0 ------ 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0
4Erschütterungs- empfindlichkeit 0 0 1 ------ 0 0 0 0 1 0 0 1 0 1 0 0 1 0 0 0
5Verfahrwege 0 0 1 1 ------ 1 0 0 0 0 0 1 0 1 0 0 1 0 0 0
6Detektor wechsel 0 0 1 1 0 ------ 0 0 1 0 1 0 0 1 1 1 1 0 0 0
7Geschwindig-keiten 1 1 1 1 1 1 ------ 0 1 1 1 1 1 1 1 1 1 1 1 1
8Beschleunigungen 1 1 1 1 1 1 1 ------ 1 1 1 1 1 1 1 1 1 1 1 1
9Montage 0 0 1 0 1 0 0 0 ------ 1 1 1 0 1 1 1 1 0 0 1
10Energieversorgung 1 0 1 1 1 1 0 0 0 ------ 1 1 1 1 1 1 1 0 0 1
11Strahlungsschutz 0 0 1 1 1 0 0 0 0 0 ------ 0 1 0 0 1 1 0 0 0
12Kühlung 0 0 1 0 0 1 0 0 0 0 1 ------ 0 1 0 1 1 0 0 0
13Ansteuerung 0 0 1 1 1 1 0 0 1 0 0 1 ------ 1 1 1 1 1 1 0
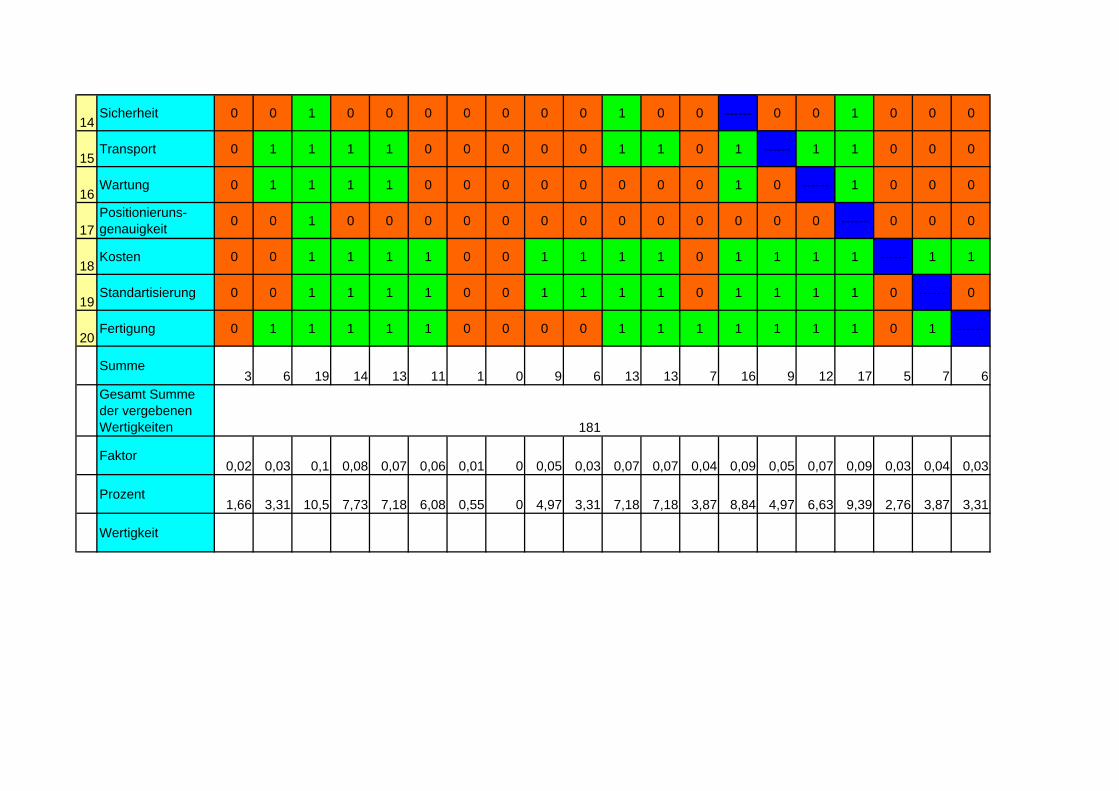
14Sicherheit 0 0 1 0 0 0 0 0 0 0 1 0 0 ------ 0 0 1 0 0 0
15Transport 0 1 1 1 1 0 0 0 0 0 1 1 0 1 ------ 1 1 0 0 0
16Wartung 0 1 1 1 1 0 0 0 0 0 0 0 0 1 0 ------ 1 0 0 0
17Positionieruns- genauigkeit 0 0 1 0 0 0 0 0 0 0 0 0 0 0 0 0 ------ 0 0 0
18Kosten 0 0 1 1 1 1 0 0 1 1 1 1 0 1 1 1 1 ------ 1 1
19Standartisierung 0 0 1 1 1 1 0 0 1 1 1 1 0 1 1 1 1 0 ------ 0
20Fertigung 0 1 1 1 1 1 0 0 0 0 1 1 1 1 1 1 1 0 1 ------
Summe3 6 19 14 13 11 1 0 9 6 13 13 7 16 9 12 17 5 7 6
Gesamt Summe der vergebenen Wertigkeiten 181
Faktor0,02 0,03 0,1 0,08 0,07 0,06 0,01 0 0,05 0,03 0,07 0,07 0,04 0,09 0,05 0,07 0,09 0,03 0,04 0,03
Prozent1,66 3,31 10,5 7,73 7,18 6,08 0,55 0 4,97 3,31 7,18 7,18 3,87 8,84 4,97 6,63 9,39 2,76 3,87 3,31
Wertigkeit
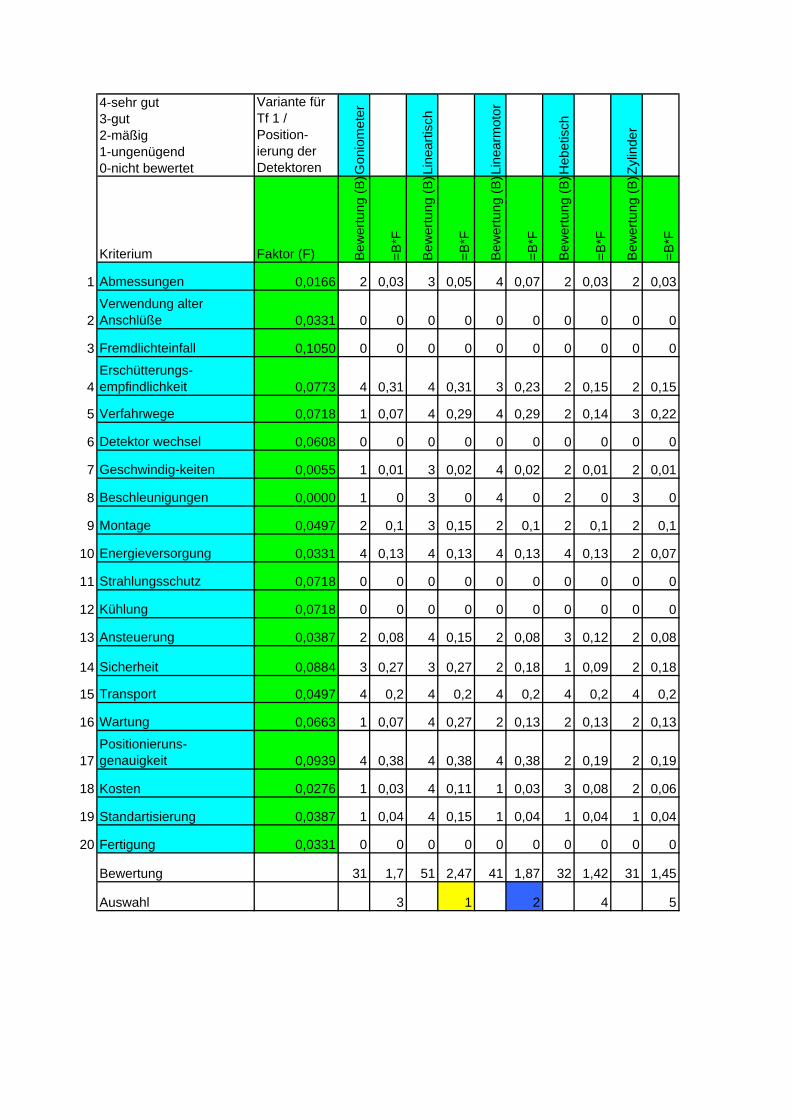
4-sehr gut 3-gut 2-mäßig 1-ungenügend 0-nicht bewertet
Variante für Tf 1 / Position-ierung der Detektoren G
onio
met
er
Line
artis
ch
Line
arm
otor
Heb
etis
ch
Zylin
der
Kriterium Faktor (F) Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
1 Abmessungen 0,0166 2 0,03 3 0,05 4 0,07 2 0,03 2 0,03
2Verwendung alter Anschlüße 0,0331 0 0 0 0 0 0 0 0 0 0
3 Fremdlichteinfall 0,1050 0 0 0 0 0 0 0 0 0 0
4Erschütterungs- empfindlichkeit 0,0773 4 0,31 4 0,31 3 0,23 2 0,15 2 0,15
5 Verfahrwege 0,0718 1 0,07 4 0,29 4 0,29 2 0,14 3 0,22
6 Detektor wechsel 0,0608 0 0 0 0 0 0 0 0 0 0
7 Geschwindig-keiten 0,0055 1 0,01 3 0,02 4 0,02 2 0,01 2 0,01
8 Beschleunigungen 0,0000 1 0 3 0 4 0 2 0 3 0
9 Montage 0,0497 2 0,1 3 0,15 2 0,1 2 0,1 2 0,1
10 Energieversorgung 0,0331 4 0,13 4 0,13 4 0,13 4 0,13 2 0,07
11 Strahlungsschutz 0,0718 0 0 0 0 0 0 0 0 0 0
12 Kühlung 0,0718 0 0 0 0 0 0 0 0 0 0
13 Ansteuerung 0,0387 2 0,08 4 0,15 2 0,08 3 0,12 2 0,08
14 Sicherheit 0,0884 3 0,27 3 0,27 2 0,18 1 0,09 2 0,18
15 Transport 0,0497 4 0,2 4 0,2 4 0,2 4 0,2 4 0,2
16 Wartung 0,0663 1 0,07 4 0,27 2 0,13 2 0,13 2 0,13
17Positionieruns- genauigkeit 0,0939 4 0,38 4 0,38 4 0,38 2 0,19 2 0,19
18 Kosten 0,0276 1 0,03 4 0,11 1 0,03 3 0,08 2 0,06
19 Standartisierung 0,0387 1 0,04 4 0,15 1 0,04 1 0,04 1 0,04
20 Fertigung 0,0331 0 0 0 0 0 0 0 0 0 0
Bewertung 31 1,7 51 2,47 41 1,87 32 1,42 31 1,45
Auswahl 3 1 2 4 5

4-sehr gut 3-gut 2-mäßig 1-ungenügend 0-nicht bewertet Variante für
Tf 2/ Position-ierungs-steuerung Tw
in L
ine
Posi
tioni
er
steu
erun
g
Uni
vers
elle
M
otor
steu
erun
g
Schr
ittm
otor
steu
erun
g
Pneu
mat
isch
e Sp
eich
erun
g
Hyd
raul
isch
e Sp
eich
erun
g
Kriterium Faktor (F) Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
1 Abmessungen 0,0166 3 0,05 2 0,03 3 0,05 2 0,03 1 0,02
2Verwendung alter Anschlüße 0,0331 0 0 0 0 0 0 0 0 0 0
3 Fremdlichteinfall 0,1050 0 0 0 0 0 0 0 0 0 0
4Erschütterungs- empfindlichkeit 0,0773 0 0 0 0 0 0 0 0 0 0
5 Verfahrwege 0,0718 0 0 0 0 0 0 0 0 0 0
6 Detektor wechsel 0,0608 0 0 0 0 0 0 0 0 0 0
7 Geschwindig-keiten 0,0055 0 0 0 0 0 0 0 0 0 0
8 Beschleunigungen 0,0000 0 0 0 0 0 0 0 0 0 0
9 Montage 0,0497 4 0,2 3 0,15 4 0,2 2 0,1 2 0,1
10 Energieversorgung 0,0331 4 0,13 4 0,13 4 0,13 2 0,07 1 0,03
11 Strahlungsschutz 0,0718 0 0 0 0 0 0 0 0 0 0
12 Kühlung 0,0718 0 0 0 0 0 0 0 0 0 0
13 Ansteuerung 0,0387 4 0,15 3 0,12 4 0,15 1 0,04 1 0,04
14 Sicherheit 0,0884 0 0 0 0 0 0 0 0 0 0
15 Transport 0,0497 0 0 0 0 0 0 0 0 0 0
16 Wartung 0,0663 0 0 0 0 0 0 0 0 0 0
17Positionieruns- genauigkeit 0,0939 3 0,28 2 0,19 4 0,38 3 0,28 2 0,19
18 Kosten 0,0276 2 0,06 1 0,03 4 0,11 2 0,06 1 0,03
19 Standartisierung 0,0387 1 0,04 1 0,04 4 0,15 1 0,04 1 0,04
20 Fertigung 0,0331 0 0 0 0 0 0 0 0 0 0
Bewertung 21 0,91 16 0,69 27 1,18 13 0,61 9 0,44
Auswahl 2 1
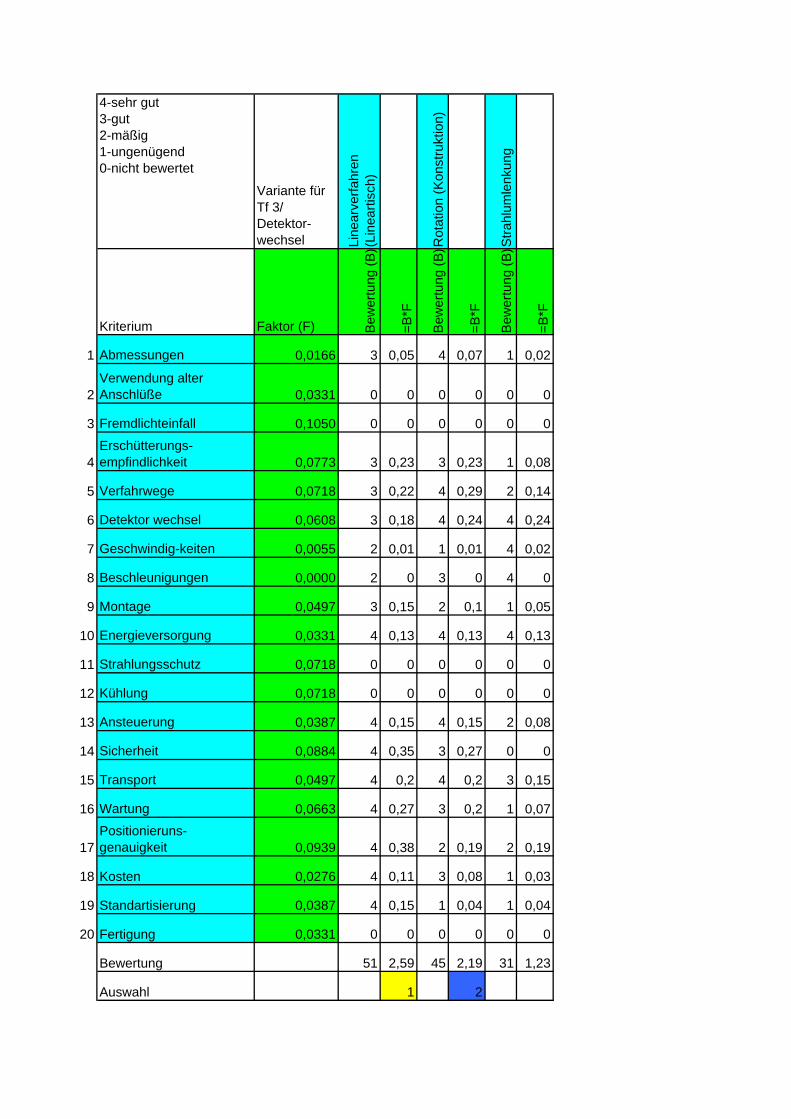
4-sehr gut 3-gut 2-mäßig 1-ungenügend 0-nicht bewertet
Variante für Tf 3/ Detektor- wechsel Li
near
verfa
hren
(L
inea
rtisc
h)
Rot
atio
n (K
onst
rukt
ion)
Stra
hlum
lenk
ung
Kriterium Faktor (F) Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
1 Abmessungen 0,0166 3 0,05 4 0,07 1 0,02
2Verwendung alter Anschlüße 0,0331 0 0 0 0 0 0
3 Fremdlichteinfall 0,1050 0 0 0 0 0 0
4Erschütterungs- empfindlichkeit 0,0773 3 0,23 3 0,23 1 0,08
5 Verfahrwege 0,0718 3 0,22 4 0,29 2 0,14
6 Detektor wechsel 0,0608 3 0,18 4 0,24 4 0,24
7 Geschwindig-keiten 0,0055 2 0,01 1 0,01 4 0,02
8 Beschleunigungen 0,0000 2 0 3 0 4 0
9 Montage 0,0497 3 0,15 2 0,1 1 0,05
10 Energieversorgung 0,0331 4 0,13 4 0,13 4 0,13
11 Strahlungsschutz 0,0718 0 0 0 0 0 0
12 Kühlung 0,0718 0 0 0 0 0 0
13 Ansteuerung 0,0387 4 0,15 4 0,15 2 0,08
14 Sicherheit 0,0884 4 0,35 3 0,27 0 0
15 Transport 0,0497 4 0,2 4 0,2 3 0,15
16 Wartung 0,0663 4 0,27 3 0,2 1 0,07
17Positionieruns- genauigkeit 0,0939 4 0,38 2 0,19 2 0,19
18 Kosten 0,0276 4 0,11 3 0,08 1 0,03
19 Standartisierung 0,0387 4 0,15 1 0,04 1 0,04
20 Fertigung 0,0331 0 0 0 0 0 0
Bewertung 51 2,59 45 2,19 31 1,23
Auswahl 1 2
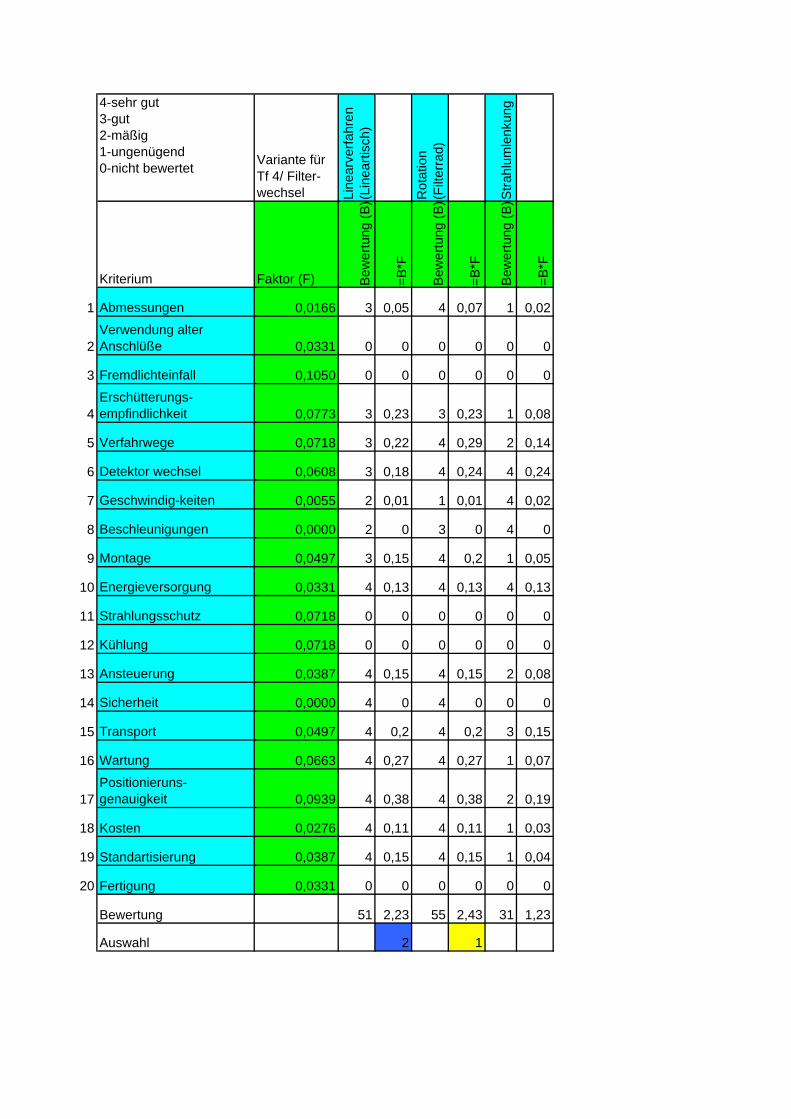
4-sehr gut 3-gut 2-mäßig 1-ungenügend 0-nicht bewertet Variante für
Tf 4/ Filter- wechsel Li
near
verfa
hren
(L
inea
rtisc
h)
Rot
atio
n (F
ilter
rad)
Stra
hlum
lenk
ung
Kriterium Faktor (F) Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
1 Abmessungen 0,0166 3 0,05 4 0,07 1 0,02
2Verwendung alter Anschlüße 0,0331 0 0 0 0 0 0
3 Fremdlichteinfall 0,1050 0 0 0 0 0 0
4Erschütterungs- empfindlichkeit 0,0773 3 0,23 3 0,23 1 0,08
5 Verfahrwege 0,0718 3 0,22 4 0,29 2 0,14
6 Detektor wechsel 0,0608 3 0,18 4 0,24 4 0,24
7 Geschwindig-keiten 0,0055 2 0,01 1 0,01 4 0,02
8 Beschleunigungen 0,0000 2 0 3 0 4 0
9 Montage 0,0497 3 0,15 4 0,2 1 0,05
10 Energieversorgung 0,0331 4 0,13 4 0,13 4 0,13
11 Strahlungsschutz 0,0718 0 0 0 0 0 0
12 Kühlung 0,0718 0 0 0 0 0 0
13 Ansteuerung 0,0387 4 0,15 4 0,15 2 0,08
14 Sicherheit 0,0000 4 0 4 0 0 0
15 Transport 0,0497 4 0,2 4 0,2 3 0,15
16 Wartung 0,0663 4 0,27 4 0,27 1 0,07
17Positionieruns- genauigkeit 0,0939 4 0,38 4 0,38 2 0,19
18 Kosten 0,0276 4 0,11 4 0,11 1 0,03
19 Standartisierung 0,0387 4 0,15 4 0,15 1 0,04
20 Fertigung 0,0331 0 0 0 0 0 0
Bewertung 51 2,23 55 2,43 31 1,23
Auswahl 2 1
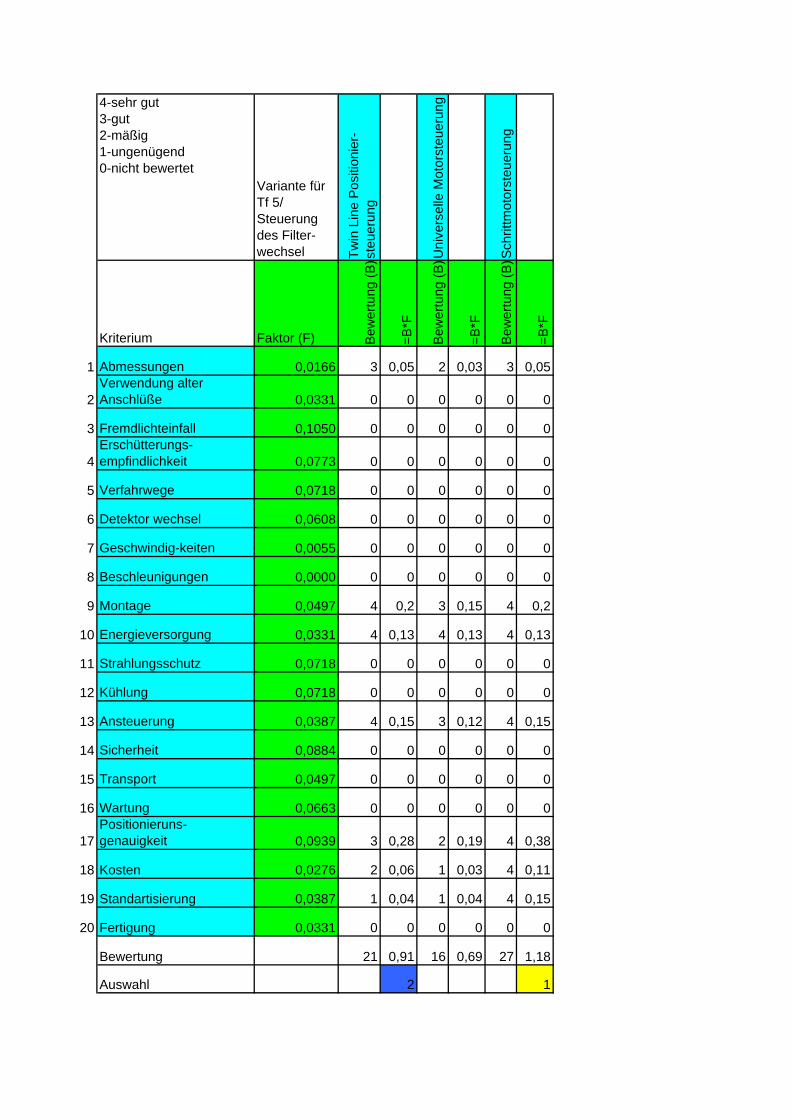
4-sehr gut 3-gut 2-mäßig 1-ungenügend 0-nicht bewertet
Variante für Tf 5/ Steuerung des Filter-wechsel Tw
in L
ine
Posi
tioni
er-
steu
erun
g
Uni
vers
elle
Mot
orst
euer
ung
Schr
ittm
otor
steu
erun
g
Kriterium Faktor (F) Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
1 Abmessungen 0,0166 3 0,05 2 0,03 3 0,05
2Verwendung alter Anschlüße 0,0331 0 0 0 0 0 0
3 Fremdlichteinfall 0,1050 0 0 0 0 0 0
4Erschütterungs- empfindlichkeit 0,0773 0 0 0 0 0 0
5 Verfahrwege 0,0718 0 0 0 0 0 0
6 Detektor wechsel 0,0608 0 0 0 0 0 0
7 Geschwindig-keiten 0,0055 0 0 0 0 0 0
8 Beschleunigungen 0,0000 0 0 0 0 0 0
9 Montage 0,0497 4 0,2 3 0,15 4 0,2
10 Energieversorgung 0,0331 4 0,13 4 0,13 4 0,13
11 Strahlungsschutz 0,0718 0 0 0 0 0 0
12 Kühlung 0,0718 0 0 0 0 0 0
13 Ansteuerung 0,0387 4 0,15 3 0,12 4 0,15
14 Sicherheit 0,0884 0 0 0 0 0 0
15 Transport 0,0497 0 0 0 0 0 0
16 Wartung 0,0663 0 0 0 0 0 0
17Positionieruns- genauigkeit 0,0939 3 0,28 2 0,19 4 0,38
18 Kosten 0,0276 2 0,06 1 0,03 4 0,11
19 Standartisierung 0,0387 1 0,04 1 0,04 4 0,15
20 Fertigung 0,0331 0 0 0 0 0 0
Bewertung 21 0,91 16 0,69 27 1,18
Auswahl 2 1

4-sehr gut 3-gut 2-mäßig 1-ungenügend 0-nicht bewertet
Variante für Tf 6 / Position-ierung der Filter H
ebet
isch
Line
artis
ch
Keilv
ersi
ebun
g
Line
arm
otor
Zylin
der
Kriterium Faktor (F) Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
1 Abmessungen 0,0166 4 0,07 3 0,05 4 0,07 2 0,03 2 0,03
2Verwendung alter Anschlüße 0,0331 0 0 0 0 0 0 0 0 0 0
3 Fremdlichteinfall 0,1050 0 0 0 0 0 0 0 0 0 0
4Erschütterungs- empfindlichkeit 0,0773 4 0,31 4 0,31 3 0,23 2 0,15 2 0,15
5 Verfahrwege 0,0718 4 0,29 3 0,22 3 0,22 2 0,14 2 0,14
6 Detektor wechsel 0,0608 0 0 0 0 0 0 0 0 0 0
7 Geschwindig-keiten 0,0055 1 0,01 3 0,02 4 0,02 2 0,01 2 0,01
8 Beschleunigungen 0,0000 1 0 3 0 4 0 2 0 3 0
9 Montage 0,0497 4 0,2 3 0,15 4 0,2 2 0,1 2 0,1
10 Energieversorgung 0,0331 4 0,13 3 0,1 4 0,13 4 0,13 2 0,07
11 Strahlungsschutz 0,0718 0 0 0 0 0 0 0 0 0 0
12 Kühlung 0,0718 0 0 0 0 0 0 0 0 0 0
13 Ansteuerung 0,0387 4 0,15 3 0,12 4 0,15 3 0,12 2 0,08
14 Sicherheit 0,0884 4 0,35 3 0,27 4 0,35 1 0,09 2 0,18
15 Transport 0,0497 4 0,2 3 0,15 4 0,2 4 0,2 4 0,2
16 Wartung 0,0663 4 0,27 3 0,2 4 0,27 2 0,13 2 0,13
17Positionieruns- genauigkeit 0,0939 4 0,38 2 0,19 3 0,28 2 0,19 2 0,19
18 Kosten 0,0276 4 0,11 3 0,08 3 0,08 3 0,08 2 0,06
19 Standartisierung 0,0387 3 0,12 4 0,15 3 0,12 1 0,04 1 0,04
20 Fertigung 0,0331 0 0 0 0 0 0 0 0 0 0
Bewertung 49 2,57 43 1,99 51 2,32 32 1,42 30 1,38
Auswahl 1 3 2 4 5
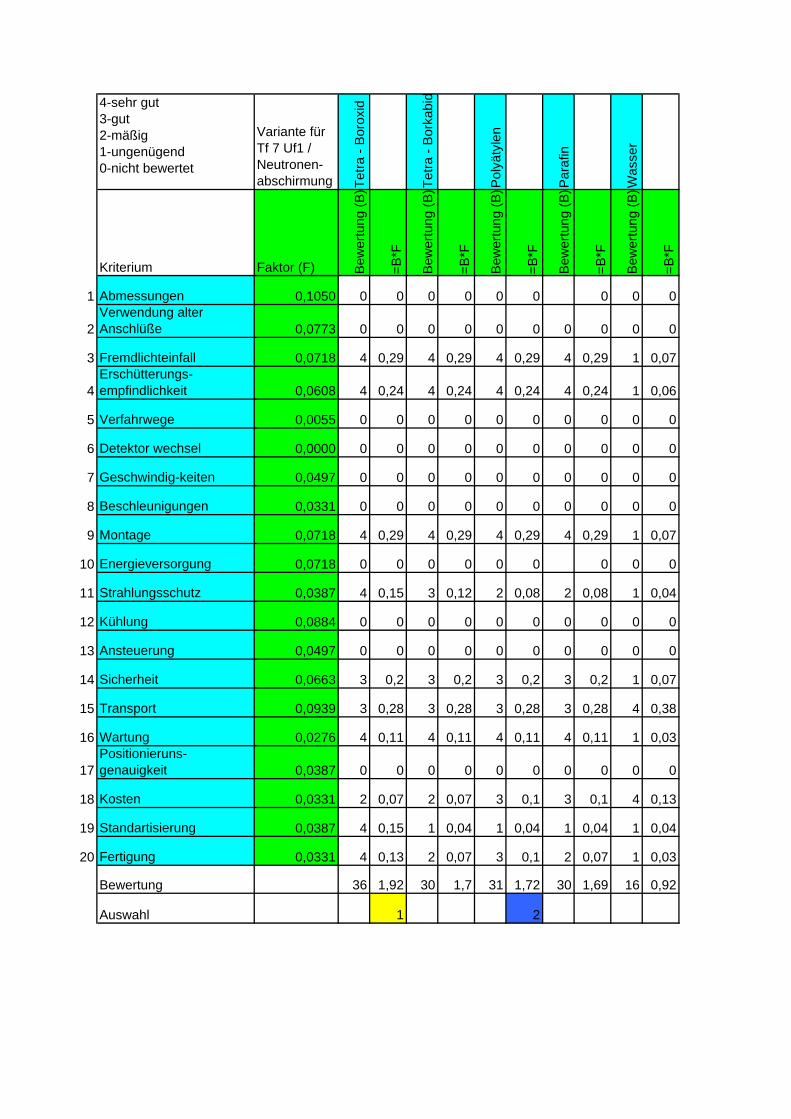
4-sehr gut 3-gut 2-mäßig 1-ungenügend 0-nicht bewertet
Variante für Tf 7 Uf1 / Neutronen- abschirmung Te
tra -
Boro
xid
Tetra
- Bo
rkab
id
Poly
ätyl
en
Para
fin
Was
ser
Kriterium Faktor (F) Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
1 Abmessungen 0,1050 0 0 0 0 0 0 0 0 0
2Verwendung alter Anschlüße 0,0773 0 0 0 0 0 0 0 0 0 0
3 Fremdlichteinfall 0,0718 4 0,29 4 0,29 4 0,29 4 0,29 1 0,07
4Erschütterungs- empfindlichkeit 0,0608 4 0,24 4 0,24 4 0,24 4 0,24 1 0,06
5 Verfahrwege 0,0055 0 0 0 0 0 0 0 0 0 0
6 Detektor wechsel 0,0000 0 0 0 0 0 0 0 0 0 0
7 Geschwindig-keiten 0,0497 0 0 0 0 0 0 0 0 0 0
8 Beschleunigungen 0,0331 0 0 0 0 0 0 0 0 0 0
9 Montage 0,0718 4 0,29 4 0,29 4 0,29 4 0,29 1 0,07
10 Energieversorgung 0,0718 0 0 0 0 0 0 0 0 0
11 Strahlungsschutz 0,0387 4 0,15 3 0,12 2 0,08 2 0,08 1 0,04
12 Kühlung 0,0884 0 0 0 0 0 0 0 0 0 0
13 Ansteuerung 0,0497 0 0 0 0 0 0 0 0 0 0
14 Sicherheit 0,0663 3 0,2 3 0,2 3 0,2 3 0,2 1 0,07
15 Transport 0,0939 3 0,28 3 0,28 3 0,28 3 0,28 4 0,38
16 Wartung 0,0276 4 0,11 4 0,11 4 0,11 4 0,11 1 0,03
17Positionieruns- genauigkeit 0,0387 0 0 0 0 0 0 0 0 0 0
18 Kosten 0,0331 2 0,07 2 0,07 3 0,1 3 0,1 4 0,13
19 Standartisierung 0,0387 4 0,15 1 0,04 1 0,04 1 0,04 1 0,04
20 Fertigung 0,0331 4 0,13 2 0,07 3 0,1 2 0,07 1 0,03
Bewertung 36 1,92 30 1,7 31 1,72 30 1,69 16 0,92
Auswahl 1 2
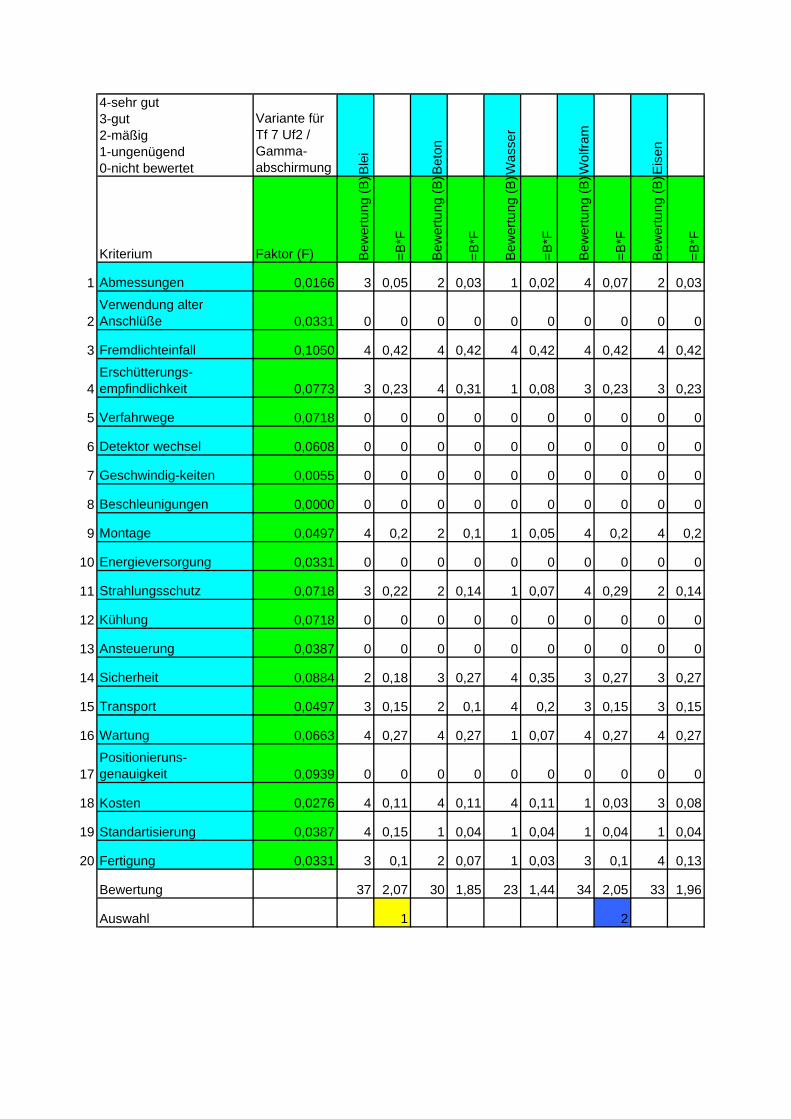
4-sehr gut 3-gut 2-mäßig 1-ungenügend 0-nicht bewertet
Variante für Tf 7 Uf2 / Gamma- abschirmung Bl
ei
Beto
n
Was
ser
Wol
fram
Eise
n
Kriterium Faktor (F) Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
1 Abmessungen 0,0166 3 0,05 2 0,03 1 0,02 4 0,07 2 0,03
2Verwendung alter Anschlüße 0,0331 0 0 0 0 0 0 0 0 0 0
3 Fremdlichteinfall 0,1050 4 0,42 4 0,42 4 0,42 4 0,42 4 0,42
4Erschütterungs- empfindlichkeit 0,0773 3 0,23 4 0,31 1 0,08 3 0,23 3 0,23
5 Verfahrwege 0,0718 0 0 0 0 0 0 0 0 0 0
6 Detektor wechsel 0,0608 0 0 0 0 0 0 0 0 0 0
7 Geschwindig-keiten 0,0055 0 0 0 0 0 0 0 0 0 0
8 Beschleunigungen 0,0000 0 0 0 0 0 0 0 0 0 0
9 Montage 0,0497 4 0,2 2 0,1 1 0,05 4 0,2 4 0,2
10 Energieversorgung 0,0331 0 0 0 0 0 0 0 0 0 0
11 Strahlungsschutz 0,0718 3 0,22 2 0,14 1 0,07 4 0,29 2 0,14
12 Kühlung 0,0718 0 0 0 0 0 0 0 0 0 0
13 Ansteuerung 0,0387 0 0 0 0 0 0 0 0 0 0
14 Sicherheit 0,0884 2 0,18 3 0,27 4 0,35 3 0,27 3 0,27
15 Transport 0,0497 3 0,15 2 0,1 4 0,2 3 0,15 3 0,15
16 Wartung 0,0663 4 0,27 4 0,27 1 0,07 4 0,27 4 0,27
17Positionieruns- genauigkeit 0,0939 0 0 0 0 0 0 0 0 0 0
18 Kosten 0,0276 4 0,11 4 0,11 4 0,11 1 0,03 3 0,08
19 Standartisierung 0,0387 4 0,15 1 0,04 1 0,04 1 0,04 1 0,04
20 Fertigung 0,0331 3 0,1 2 0,07 1 0,03 3 0,1 4 0,13
Bewertung 37 2,07 30 1,85 23 1,44 34 2,05 33 1,96
Auswahl 1 2
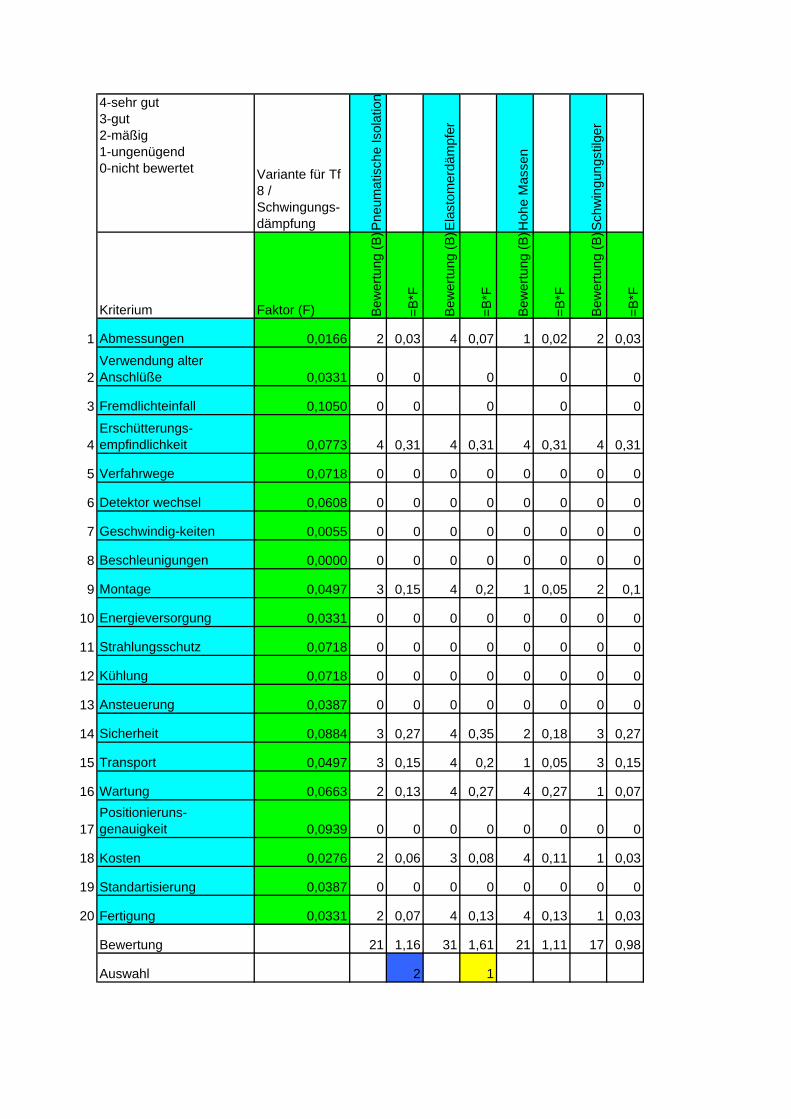
4-sehr gut 3-gut 2-mäßig 1-ungenügend 0-nicht bewertet Variante für Tf
8 / Schwingungs-dämpfung Pn
eum
atis
che
Isol
atio
n
Elas
tom
erdä
mpf
er
Hoh
e M
asse
n
Schw
ingu
ngst
ilger
Kriterium Faktor (F) Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
1 Abmessungen 0,0166 2 0,03 4 0,07 1 0,02 2 0,03
2Verwendung alter Anschlüße 0,0331 0 0 0 0 0
3 Fremdlichteinfall 0,1050 0 0 0 0 0
4Erschütterungs- empfindlichkeit 0,0773 4 0,31 4 0,31 4 0,31 4 0,31
5 Verfahrwege 0,0718 0 0 0 0 0 0 0 0
6 Detektor wechsel 0,0608 0 0 0 0 0 0 0 0
7 Geschwindig-keiten 0,0055 0 0 0 0 0 0 0 0
8 Beschleunigungen 0,0000 0 0 0 0 0 0 0 0
9 Montage 0,0497 3 0,15 4 0,2 1 0,05 2 0,1
10 Energieversorgung 0,0331 0 0 0 0 0 0 0 0
11 Strahlungsschutz 0,0718 0 0 0 0 0 0 0 0
12 Kühlung 0,0718 0 0 0 0 0 0 0 0
13 Ansteuerung 0,0387 0 0 0 0 0 0 0 0
14 Sicherheit 0,0884 3 0,27 4 0,35 2 0,18 3 0,27
15 Transport 0,0497 3 0,15 4 0,2 1 0,05 3 0,15
16 Wartung 0,0663 2 0,13 4 0,27 4 0,27 1 0,07
17Positionieruns- genauigkeit 0,0939 0 0 0 0 0 0 0 0
18 Kosten 0,0276 2 0,06 3 0,08 4 0,11 1 0,03
19 Standartisierung 0,0387 0 0 0 0 0 0 0 0
20 Fertigung 0,0331 2 0,07 4 0,13 4 0,13 1 0,03
Bewertung 21 1,16 31 1,61 21 1,11 17 0,98
Auswahl 2 1
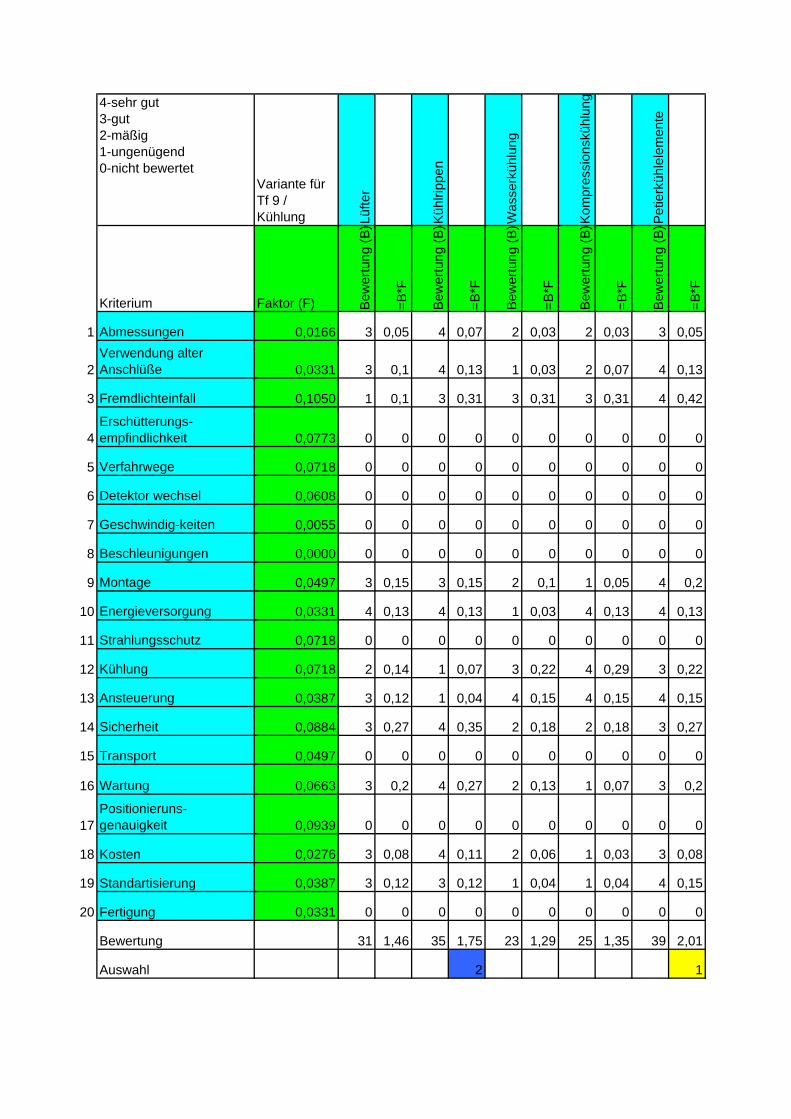
4-sehr gut 3-gut 2-mäßig 1-ungenügend 0-nicht bewertet
Variante für Tf 9 / Kühlung Lü
fter
Kühl
rippe
n
Was
serk
ühlu
ng
Kom
pres
sion
sküh
lung
Petie
rküh
lele
men
te
Kriterium Faktor (F) Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
1 Abmessungen 0,0166 3 0,05 4 0,07 2 0,03 2 0,03 3 0,05
2Verwendung alter Anschlüße 0,0331 3 0,1 4 0,13 1 0,03 2 0,07 4 0,13
3 Fremdlichteinfall 0,1050 1 0,1 3 0,31 3 0,31 3 0,31 4 0,42
4Erschütterungs- empfindlichkeit 0,0773 0 0 0 0 0 0 0 0 0 0
5 Verfahrwege 0,0718 0 0 0 0 0 0 0 0 0 0
6 Detektor wechsel 0,0608 0 0 0 0 0 0 0 0 0 0
7 Geschwindig-keiten 0,0055 0 0 0 0 0 0 0 0 0 0
8 Beschleunigungen 0,0000 0 0 0 0 0 0 0 0 0 0
9 Montage 0,0497 3 0,15 3 0,15 2 0,1 1 0,05 4 0,2
10 Energieversorgung 0,0331 4 0,13 4 0,13 1 0,03 4 0,13 4 0,13
11 Strahlungsschutz 0,0718 0 0 0 0 0 0 0 0 0 0
12 Kühlung 0,0718 2 0,14 1 0,07 3 0,22 4 0,29 3 0,22
13 Ansteuerung 0,0387 3 0,12 1 0,04 4 0,15 4 0,15 4 0,15
14 Sicherheit 0,0884 3 0,27 4 0,35 2 0,18 2 0,18 3 0,27
15 Transport 0,0497 0 0 0 0 0 0 0 0 0 0
16 Wartung 0,0663 3 0,2 4 0,27 2 0,13 1 0,07 3 0,2
17Positionieruns- genauigkeit 0,0939 0 0 0 0 0 0 0 0 0 0
18 Kosten 0,0276 3 0,08 4 0,11 2 0,06 1 0,03 3 0,08
19 Standartisierung 0,0387 3 0,12 3 0,12 1 0,04 1 0,04 4 0,15
20 Fertigung 0,0331 0 0 0 0 0 0 0 0 0 0
Bewertung 31 1,46 35 1,75 23 1,29 25 1,35 39 2,01
Auswahl 2 1
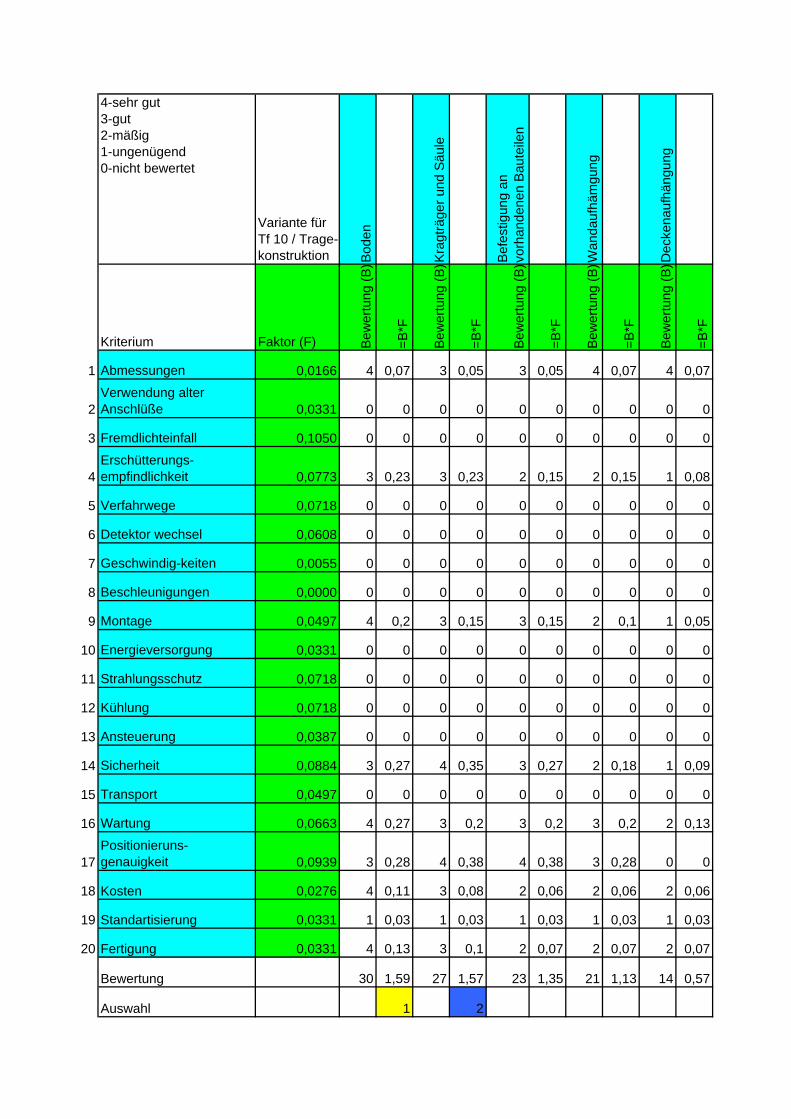
4-sehr gut 3-gut 2-mäßig 1-ungenügend 0-nicht bewertet
Variante für Tf 10 / Trage-konstruktion Bo
den
Krag
träge
r und
Säu
le
Befe
stig
ung
an
vorh
ande
nen
Baut
eile
n
Wan
dauf
häm
gung
Dec
kena
ufhä
ngun
g
Kriterium Faktor (F) Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
Bew
ertu
ng (B
)
=B*F
1 Abmessungen 0,0166 4 0,07 3 0,05 3 0,05 4 0,07 4 0,07
2Verwendung alter Anschlüße 0,0331 0 0 0 0 0 0 0 0 0 0
3 Fremdlichteinfall 0,1050 0 0 0 0 0 0 0 0 0 0
4Erschütterungs- empfindlichkeit 0,0773 3 0,23 3 0,23 2 0,15 2 0,15 1 0,08
5 Verfahrwege 0,0718 0 0 0 0 0 0 0 0 0 0
6 Detektor wechsel 0,0608 0 0 0 0 0 0 0 0 0 0
7 Geschwindig-keiten 0,0055 0 0 0 0 0 0 0 0 0 0
8 Beschleunigungen 0,0000 0 0 0 0 0 0 0 0 0 0
9 Montage 0,0497 4 0,2 3 0,15 3 0,15 2 0,1 1 0,05
10 Energieversorgung 0,0331 0 0 0 0 0 0 0 0 0 0
11 Strahlungsschutz 0,0718 0 0 0 0 0 0 0 0 0 0
12 Kühlung 0,0718 0 0 0 0 0 0 0 0 0 0
13 Ansteuerung 0,0387 0 0 0 0 0 0 0 0 0 0
14 Sicherheit 0,0884 3 0,27 4 0,35 3 0,27 2 0,18 1 0,09
15 Transport 0,0497 0 0 0 0 0 0 0 0 0 0
16 Wartung 0,0663 4 0,27 3 0,2 3 0,2 3 0,2 2 0,13
17Positionieruns- genauigkeit 0,0939 3 0,28 4 0,38 4 0,38 3 0,28 0 0
18 Kosten 0,0276 4 0,11 3 0,08 2 0,06 2 0,06 2 0,06
19 Standartisierung 0,0331 1 0,03 1 0,03 1 0,03 1 0,03 1 0,03
20 Fertigung 0,0331 4 0,13 3 0,1 2 0,07 2 0,07 2 0,07
Bewertung 30 1,59 27 1,57 23 1,35 21 1,13 14 0,57
Auswahl 1 2

OWIS GmbH [email protected]
Tel. +49 (0)76 33/95 04-0Fax +49 (0)76 33/95 04-44
Im Gaisgraben 779219 Staufen (Germany)
Präzision ist unsere Welt
Precision is Our World
Un univers de précision
• Stellweg 70 mm, 95 mm, 145 mm, 195 mm oder 295 mm
• industrietauglich• für Dauerbetrieb• 2-Phasen-Schrittmotor• hochfeste Aluminium-Spezial-
legierung• geschliffene Feingewinde-
spindel mit spielfreier Axial-lagerung
• Schlitten mit Kugel umlauf-führungen
• rostbeständige, gehärtete und geschliffene Stahl-Führungs-schienen
• berührungslose und hochge-naue Endschalter (Hall-Sen-soren)
• auf Wunsch mechanische End-schalter
• mit Schritt- oder DC-Servo-motor
Präzisions-Lineartische, motorisiertPrecision Translation Stages, motorized
• travel 70 mm, 95 mm, 145 mm, 195 mm or 295 mm
• designed for – industrial application – continuous operation• 2-phase stepping motor• high density aluminium alloy• ground fi ne thread spindle
with backlash-free axial bearings
• slide with recirculating ball bearings
• stainless, ground steel guides, case hardened
• contact free and high precisi-on Hall sensors
• optionally mechanical limit switches
• with step motors or DC-servo-motors
Die preiswerten Lineartische der Serie LTM 80 eignen sich für den Einsatz im Dauerbetrieb und den Einbau in Maschinen.Die speziellen Führungen sorgen für praktisch slip-stick-freien Lauf sowie für hohe Belastbarkeit. Die Werkstoffkombination von Gewindespindel und Mutter gewährleistet geringen Verschleiß und hohe Lebensdauer. Bodenplatte und Schlitten bestehen aus einer Aluminium legierung. Alle Aluminiumteile haben eine hochwertige schwarze Eloxal-Schutzschicht.
LTM 80
Ausgabe 28.02.2005
The economically priced linear stages of the series LTM 80 is parti-culary suitable for continuous operation and installation in machi-nes.The special guidance provide a practically slip-stick free movement as well as high load capacity. The material combination of spindle and nut ensures low abrasion and long lifetime. Base plate and slide are composed of a aluminium alloy. All aluminium parts have a top quality black anodised protective coating.
Technische Daten/Technical Data (bei 20 °C/@20 °C) Schrittmotor/step motorstep motor
DC-Servomotor/DC Servomotor
GeschwindigkeitGeschwindigkeit speedspeedohne Last without load max. 10 mm/smit Maximallast with full load max. 9 mm/s
TragkraftTragkraft load capacityload capacity max. 150 NStellkraft pushing forcepushing force max. 60 NKippmoment (Mx, My, Mz)Kippmoment (Mx, My, Mz) moment of tilt (Mx, My, Mz)moment of tilt (Mx, My, Mz) max.15 NmSpindelsteigungSpindelsteigung pitchpitch 1 mmWiederholfehler (bidirektional) repeatability (bi-directional)repeatability (bi-directional) max. 12 µmµmPositionierfehler positioning errorpositioning error max. 25 µm/100 mmµm/100 mmGierwinkel yaw yaw max. 300 µradµradNickwinkel pitchpitch max. 250 µradµradHöhenschlagHöhenschlag vertical deviation max. 5 µmµmSeitenschlagSeitenschlag lateral deviation max. 8 µmµmMotorspannung, max. zul.Motorspannung, max. zul. motor phase voltage,motor phase voltage, max. permiss. max. permiss. 40 24 VMotor-HaltespannungMotor-Haltespannung locking voltagelocking voltage 3,2 — VMotorstrom, max. zul. motor current, max. permiss.motor current, max. permiss. max. 1,81) 3,3 ASchritte/Striche pro Umdrehung pro Umdrehung steps/lines per revolutionsteps/lines per revolution 200 500Betriebsumgebungstemperatur Betriebsumgebungstemperatur 2) ambient operating temperatureambient operating temperature 2) –10 bis/to +50 +10 bis/to +40 °CLagerungstemperaturLagerungstemperatur 2) storing temperaturestoring temperature 2) –20 bis/to +70 °C1) pro Phase/per phase 2) ohne Betauung/without condensation
ProduktinformationProduct Information
9012.0002
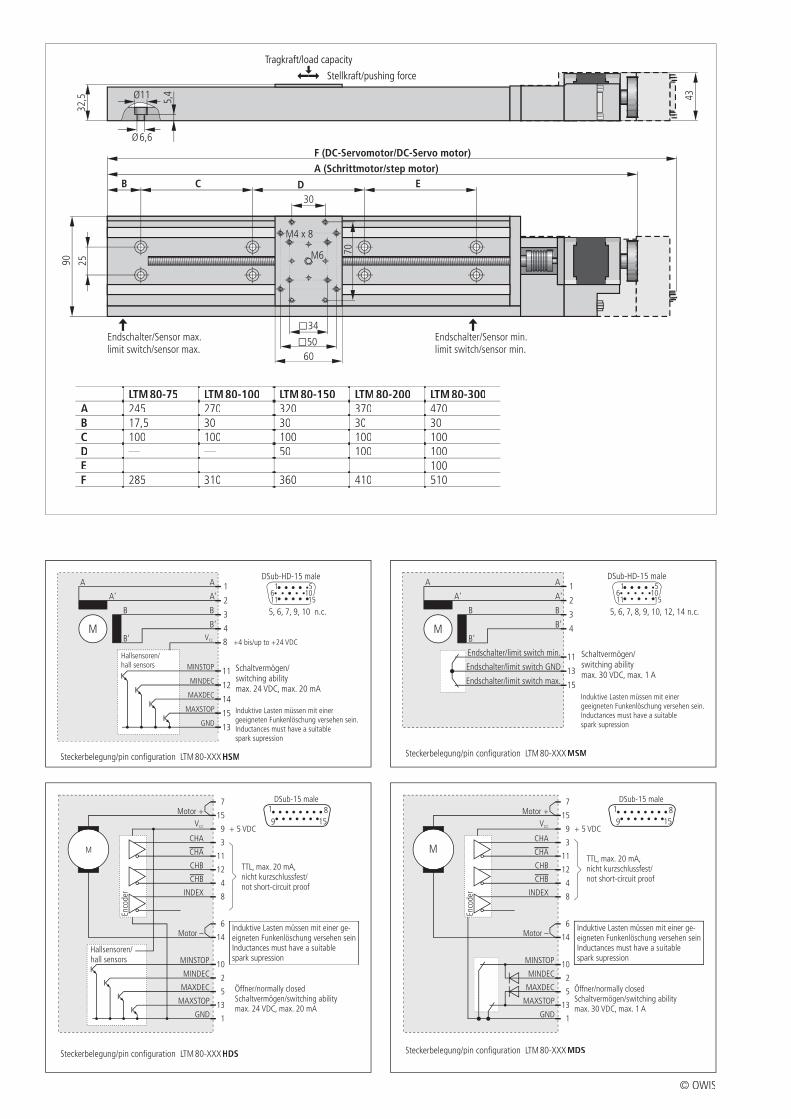
© OWIS
Steckerbelegung/pin confi guration LTM 80-XXX MSMSteckerbelegung/pin confi guration LTM 80-XXX HSM
LTM 80-75 LTM80-100 LTM80-150 LTM80-200 LTM80-300A 245 270 320 370 470B 17,5 30 30 30 30C 100 100 100 100 100D — — 50 100 100E — — — — 100F 285 310 360 410 510
Steckerbelegung/pin confi guration LTM 80-XXX MDSSteckerbelegung/pin confi guration LTM 80-XXX HDS
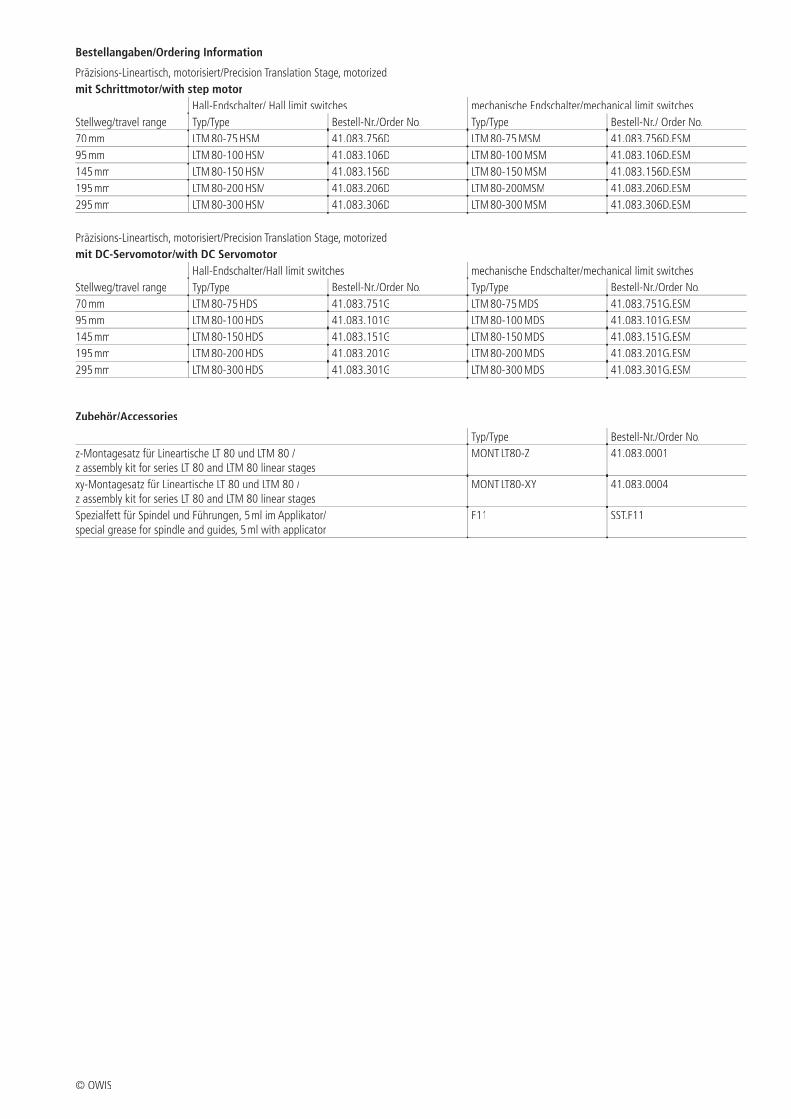
© OWIS
Bestellangaben/Ordering Information
Präzisions-Lineartisch, motorisiert/Precision Translation Stage, motorized mit Schrittmotor/with step motor
Hall-Endschalter/ Hall limit switches mechanische Endschalter/mechanical limit switchesStellweg/travel range Typ/Type Bestell-Nr./Order No. Typ/Type Bestell-Nr./ Order No.70 mm LTM 80-75 HSM 41.083.756D LTM 80-75 MSM 41.083.756D.ESM95 mm LTM 80-100 HSM 41.083.106D LTM 80-100 MSM 41.083.106D.ESM145 mm LTM 80-150 HSM 41.083.156D LTM 80-150 MSM 41.083.156D.ESM195 mm LTM 80-200 HSM 41.083.206D LTM 80-200MSM 41.083.206D.ESM295 mm LTM 80-300 HSM 41.083.306D LTM 80-300 MSM 41.083.306D.ESM
Präzisions-Lineartisch, motorisiert/Precision Translation Stage, motorized mit DC-Servomotor/with DC Servomotor
Hall-Endschalter/Hall limit switches mechanische Endschalter/mechanical limit switchesStellweg/travel range Typ/Type Bestell-Nr./Order No. Typ/Type Bestell-Nr./Order No.70 mm LTM 80-75 HDS 41.083.751G LTM 80-75 MDS 41.083.751G.ESM95 mm LTM 80-100 HDS 41.083.101G LTM 80-100 MDS 41.083.101G.ESM145 mm LTM 80-150 HDS 41.083.151G LTM 80-150 MDS 41.083.151G.ESM195 mm LTM 80-200 HDS 41.083.201G LTM 80-200 MDS 41.083.201G.ESM295 mm LTM 80-300 HDS 41.083.301G LTM 80-300 MDS 41.083.301G.ESM
Zubehör/Accessories
Typ/Type Bestell-Nr./Order No.z-Montagesatz für Lineartische LT 80 und LTM 80 /z assembly kit for series LT 80 and LTM 80 linear stages
MONT LT80-Z 41.083.0001
xy-Montagesatz für Lineartische LT 80 und LTM 80 /z assembly kit for series LT 80 and LTM 80 linear stages
MONT LT80-XY 41.083.0004
Spezialfett für Spindel und Führungen, 5 ml im Applikator/special grease for spindle and guides, 5 ml with applicator
F11 SST.F11

© OWIS
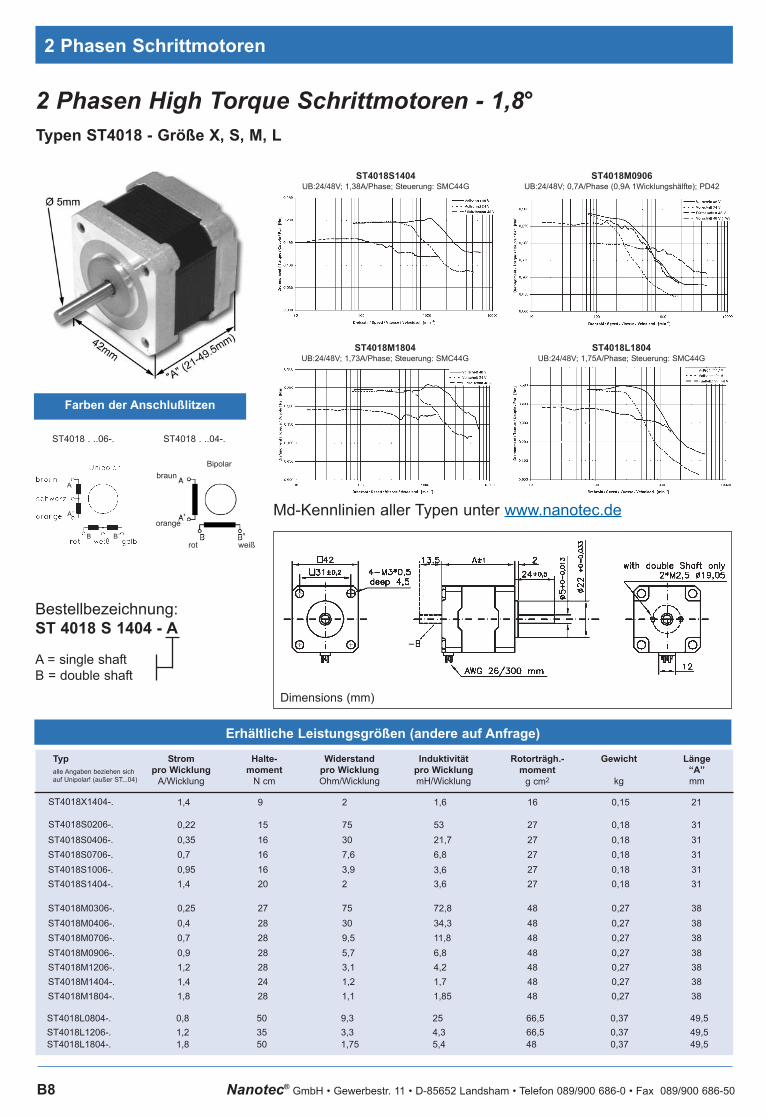
2 Phasen Schrittmotoren
2 Phasen High Torque Schrittmotoren - 1,8°
Farben der Anschlußlitzen
B8 Nanotec® GmbH • Gewerbestr. 11 • D-85652 Landsham • Telefon 089/900 686-0 • Fax 089/900 686-50
Typen ST4018 - Größe X, S, M, L
Erhältliche Leistungsgrößen (andere auf Anfrage)
Typ Strompro Wicklung
A/Wicklung
Halte-moment
N cm
Widerstandpro WicklungOhm/Wicklung
Induktivitätpro WicklungmH/Wicklung
Rotorträgh.-moment
g cm2
Gewicht
kg
Länge“A”mm
ST4018S0206-. 0,22 15ST4018S0406-. 0,35 16
75 53 27 0,18 31
ST4018X1404-. 1,4 9 2 1,6 16 0,15 21
30 21,7 27 0,18 31ST4018S0706-. 0,7 16 7,6 6,8 27 0,18 31ST4018S1006-. 0,95 16 3,9 3,6 27 0,18 31ST4018S1404-. 1,4 20 2 3,6 27 0,18 31
ST4018M0306-. 0,25 27ST4018M0406-. 0,4 28
75 72,8 48 0,27 3830 34,3 48 0,27 38
ST4018M0706-. 0,7 28 9,5 11,8 48 0,27 38ST4018M0906-. 0,9 28 5,7 6,8 48 0,27 38ST4018M1206-. 1,2 28 3,1 4,2 48 0,27 38ST4018M1404-. 1,4 24 1,2 1,7 48 0,27 38
Bestellbezeichnung:ST 4018 S 1404 - A
A = single shaftB = double shaft
ST4018M1804-. 1,8 28 1,1 1,85 48 0,27 38
ST4018L1804UB:24/48V; 1,75A/Phase; Steuerung: SMC44G
ST4018M1804UB:24/48V; 1,73A/Phase; Steuerung: SMC44G
ST4018M0906UB:24/48V; 0,7A/Phase (0,9A 1Wicklungshälfte); PD42
ST4018S1404UB:24/48V; 1,38A/Phase; Steuerung: SMC44G
ST4018L0804-. 0,8 50 9,3 25 66,5 0,37 49,5ST4018L1206-. 1,2 35 3,3 4,3 66,5 0,37 49,5ST4018L1804-. 1,8 50 1,75 5,4 48 0,37 49,5
Dimensions (mm)
ST4018 . ..06-. ST4018 . ..04-.
alle Angaben beziehen sichauf Unipolar! (außer ST...04)
A
A´
B´Brot
braun
orange
weiß
Bipolar
Md-Kennlinien aller Typen unter www.nanotec.de

ST4018L1804VM: 24 / 48 V; 1.75 A /Phase; Driver: SMC44G
0,000
0,100
0,200
0,300
0,400
0,500
10 100 1000 10000
Drehzahl / Speed / Vitesse / Velocidad [min -1]
Dre
hm
om
ent
/ T
orq
ue
/ C
ou
ple
/ P
ar
[N
m]
Vollschritt 48 V
Vollschritt 24 V
Fünftelschritt 48 V
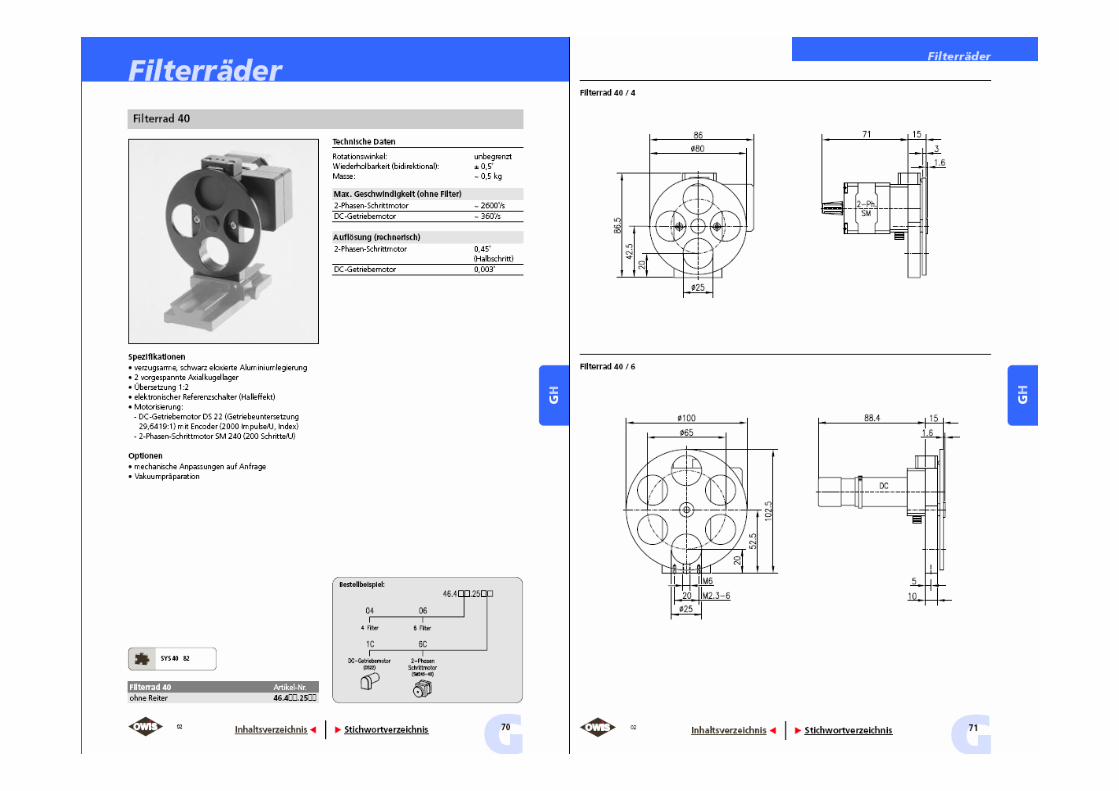

esd electronic system design gmbh Phone: +49-511-37298-0Vahrenwalder Str. 207 Fax: +49-511-37298-68
I:\texte\Doku\DBL\CAN\ENGLISCH\Blue\can_step_02.en6 D-30165 Hannover / Germany E-Mail: [email protected]
esd gmbh
PhysicalCANLayer
LEDs
serial
+5VDC
GND
10k
1x Reference SwitchInterface (ES2)
Slotted Light Switch
1x Limit SwitchInterface (ES2)GND
BrakeLoad
AMP-Modu II, 1x5-pinBrake, Reference Switch ES2
CAN-IN
CAN-OUT CAN-Status
DS-402-Status
+24VDC
(same interfacecircuit as ES0
and ES1)
2x Limit SwitchInterface (ES0, ES1)
Rotor
Stepper Motor
BridgeMotor DriverLMD18245
IOUT = 36 mA ... 3.0 A
CAN-STEPCON-1H
5V
GND
+ 24VDC
GND
Power Supply+24VDC
+24VDC
DAC
DAC REF
Combicon MSTBVA 2.5-3GPower Input
AMP-Modu II, 1x6-pinCAN-IN, CAN-OUT
Combicon MSTBVA2.5-GStepper Motor Output
+24VDC
BridgeMotor DriverLMD18245
IOUT = 36 mA ... 3.0 A
EEPROM2 kbyte
VoltageController
AMP-Modu II, 1x6-pinLimit Switch ES0, ES1
Coding SwitchModule-No. (6 bit),Baudrate (2 bits)
Break OutputLow Side Switch
Variable VoltageReference
Micro-controllerC505CA
Stepper motor interface:
CAN:
General:
Order information:
CAN-STEPCON-1HHigh Current Stepper Motor Controller
- 3 A stepper motor output- brake output- 3 limit switch inputs- easy mounting- CiA DS-402 implementation
Full Stepper ControlThe module offers full control for one high current stepper motorchannel by CiA DS-402 commands. It is equipped with two motordriver bridges that support up to ±3 A output current. The three limitswitch inputs are designed for slotted light switches. The brake outputis equipped with a low side switch.
Intelligent MicrocontrollerThe CAN-STEPCON-1H module is equipped with a C505CA-microcontroller with an integrated CAN interface. 2 Kbyte EEPROM is used to store module configuration data.
LED Display and Coding SwitchThe status LEDs display the CAN status of the module. The codingswitch is used to set the bit rate (2 bits) and the Node-ID (6 bits).
CAN BusThe physical CAN layer is ISO 11898-compliant and allows data-transfer rates of up to 1 Mbit/s.
CAN ProtocolsThe module is operating with CANopen according to CiA-DS-301 andDS-402.
Technical Specifications:
Stepper output: H-bridge with 2 motor driver controllersLMD18245, UVCC = 12 VDC ... 55 VDC,programmable IOUT = 36 mA ... 3.0 A, overtemperature and overcurrent (ILIMIT_TYP= 12 A) protection
Limit switch inputs: 3-pin connection for slotted light switches: +5 Vpower supply output, CMOS Schmitt-Triggerinput 74HC86, GND
Brake output: low side switch, UVCC = 24 VDC, INOM = 1.4 A, over current protection (ILIMIT_TYP= 7.5 A)
CAN controller: C505CA, CAN2.0A (supported by firmware)
CAN interface: differential, 1 Mbit/s, ISO11898, no electrical isolation of physical layer
Protocol: CANopen DS-301, DS-402
LED display: CAN status, DS-402 status
Ambient temperature: 0...50 /COperating voltage UVCC: 24 VDC (separate power supply for
stepper motor drivers possible)
Case dimensions: 40 mm x 35 mm x 160 mm, 6 holes(diameter 3.5 mm) for fastening screws
Designation order no.
CAN-STEPCON-1H stepper motor controller, C.2090.01CANopen DS-402
CAN-STEPCON-1H-MD German users’s manual C.2090.20
CAN-STEPCON-1H-ME English users’s manual C.2090.21

CAN-STEPCON-1H Hardware-Handbuch Rev. 1.4
CAN-STEPCON-1HHigh Current Stepper Controller
Hardware-Handbuch
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.4
Dokument-Datei: I:\texte\Doku\MANUALS\CAN\STEPCON-1H\hcstep_14h.ma9
Datum derDruckvorlagenerstellung: 16.09.2004
Platinen-Version: Rev. 1.0
Änderungen in den Kapiteln
Die hier aufgeführten Änderungen im Anwenderhandbuch betreffen sowohl Änderungen in derHardware als auch reine Änderungen in der Beschreibung der Sachverhalte.
Kapitel Änderungen gegenüber Vorversion
4.1.3 - 4.1.5 Der Leitungsstecker mit Crimp-Kontakten erhält eine neue Steckernummer
Weitere technische Änderungen vorbehalten.
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.4
Der Inhalt dieses Handbuches wurde mit größter Sorgfalt erarbeitet und geprüft. esd übernimmt jedochkeine Verantwortung für Schäden, die aus Fehlern in der Dokumentation resultieren könnten. Insbeson-dere Beschreibungen und technische Daten sind keine zugesicherten Eigenschaften im rechtlichenSinne.
esd hat das Recht, Änderungen am beschriebenen Produkt oder an der Dokumentation ohne vorherigeAnkündigung vorzunehmen, wenn sie aus Gründen der Zuverlässigkeit oder Qualitätssicherung vor-genommen werden oder dem technischen Fortschritt dienen.
Sämtliche Rechte an der Dokumentation liegen bei esd. Die Weitergabe an Dritte und Vervielfältigungjeder Art, auch auszugsweise, sind nur mit schriftlicher Genehmigung durch esd gestattet.
esd electronic system design gmbhVahrenwalder Str. 20730165 Hannover
Tel.: 0511/372 98-0FAX : 0511/372 98-68 E-Mail: [email protected]: www.esd-electronics.com
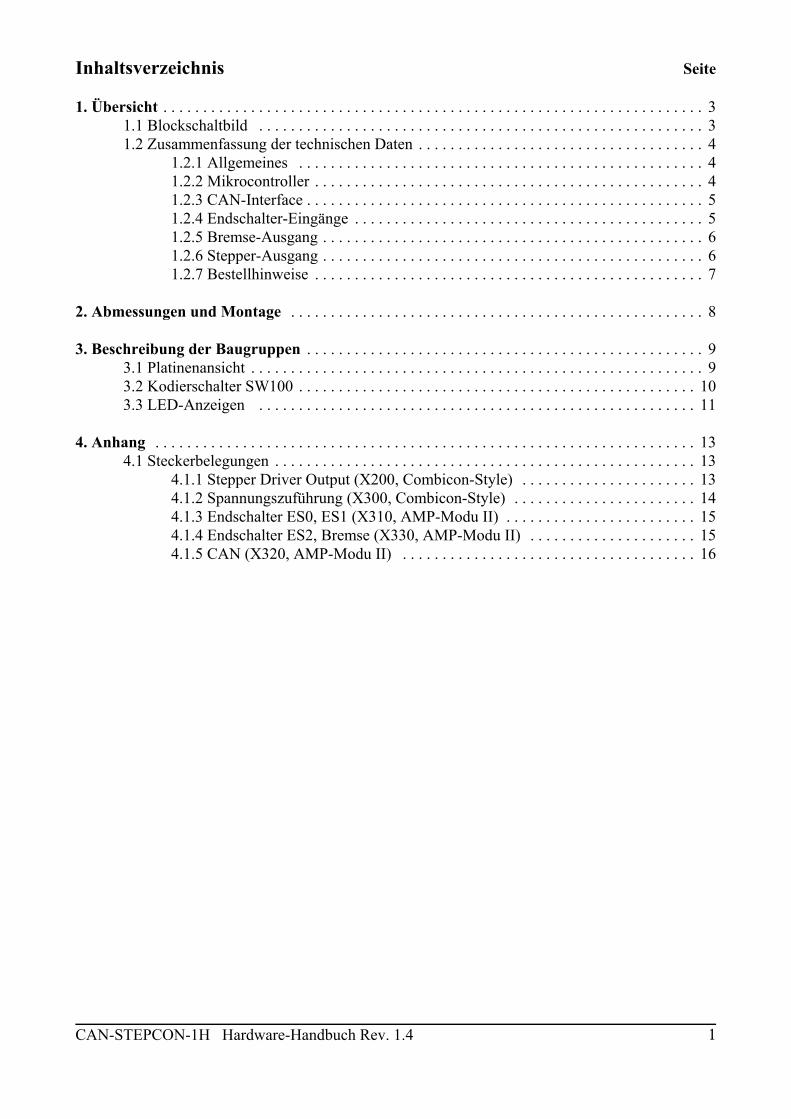
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.4 1
Inhaltsverzeichnis Seite
1. Übersicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.1 Blockschaltbild . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 31.2 Zusammenfassung der technischen Daten . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4
1.2.1 Allgemeines . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2.2 Mikrocontroller . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 41.2.3 CAN-Interface . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2.4 Endschalter-Eingänge . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 51.2.5 Bremse-Ausgang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2.6 Stepper-Ausgang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 61.2.7 Bestellhinweise . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 7
2. Abmessungen und Montage . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 8
3. Beschreibung der Baugruppen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.1 Platinenansicht . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 93.2 Kodierschalter SW100 . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103.3 LED-Anzeigen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 11
4. Anhang . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 134.1 Steckerbelegungen . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 13
4.1.1 Stepper Driver Output (X200, Combicon-Style) . . . . . . . . . . . . . . . . . . . . . . 134.1.2 Spannungszuführung (X300, Combicon-Style) . . . . . . . . . . . . . . . . . . . . . . . 144.1.3 Endschalter ES0, ES1 (X310, AMP-Modu II) . . . . . . . . . . . . . . . . . . . . . . . . 154.1.4 Endschalter ES2, Bremse (X330, AMP-Modu II) . . . . . . . . . . . . . . . . . . . . . 154.1.5 CAN (X320, AMP-Modu II) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 16
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.42
Diese Seite ist bewußt unbedruckt.
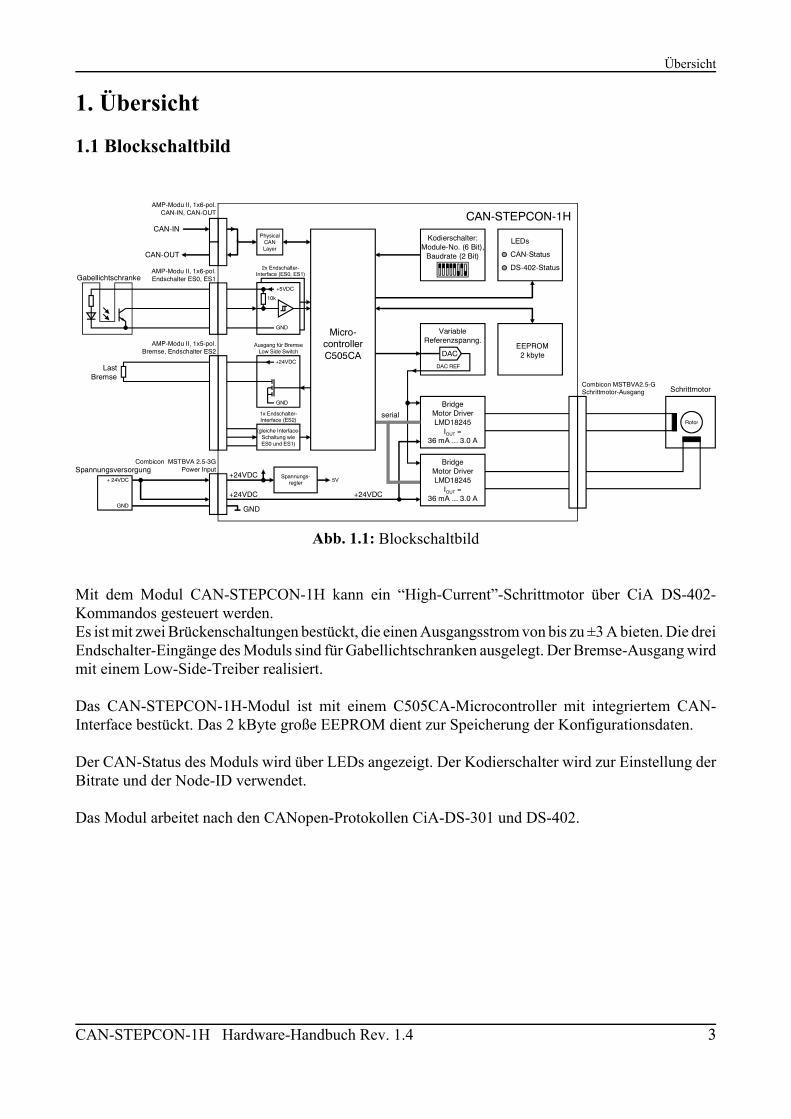
Übersicht
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.4 3
PhysicalCANLayer
LEDs
serial
+5VDC
GND
10k
1x Limit SwitchInterface (ES2)GND
CAN-IN
CAN-OUT CAN-Status
DS-402-Status
+24VDC
Rotor
BridgeMotor DriverLMD18245
IOUT = 36 mA ... 3.0 A
CAN-STEPCON-1H
5V
GND
+ 24VDC
GND
+24VDC
+24VDC
DAC
DAC REF
Combicon MSTBVA 2.5-3GPower Input
+24VDC
BridgeMotor DriverLMD18245
IOUT = 36 mA ... 3.0 A
EEPROM2 kbyte
SpannungsversorgungSpannungs-
regler
LastBremse
AMP-Modu II, 1x5-pol.Bremse, Endschalter ES2
1x Endschalter-Interface (ES2)
(gleiche Interface-Schaltung wieES0 und ES1)
Ausgang für BremseLow Side Switch
GabellichtschrankeAMP-Modu II, 1x6-pol.Endschalter ES0, ES1
AMP-Modu II, 1x6-pol.CAN-IN, CAN-OUT
2x Endschalter-Interface (ES0, ES1)
Micro-controllerC505CA
Kodierschalter:Module-No. (6 Bit),
Baudrate (2 Bit)
VariableReferenzspanng.
SchrittmotorCombicon MSTBVA2.5-GSchrittmotor-Ausgang
1. Übersicht
1.1 Blockschaltbild
Abb. 1.1: Blockschaltbild
Mit dem Modul CAN-STEPCON-1H kann ein “High-Current”-Schrittmotor über CiA DS-402-Kommandos gesteuert werden. Es ist mit zwei Brückenschaltungen bestückt, die einen Ausgangsstrom von bis zu ±3 A bieten. Die dreiEndschalter-Eingänge des Moduls sind für Gabellichtschranken ausgelegt. Der Bremse-Ausgang wirdmit einem Low-Side-Treiber realisiert.
Das CAN-STEPCON-1H-Modul ist mit einem C505CA-Microcontroller mit integriertem CAN-Interface bestückt. Das 2 kByte große EEPROM dient zur Speicherung der Konfigurationsdaten.
Der CAN-Status des Moduls wird über LEDs angezeigt. Der Kodierschalter wird zur Einstellung derBitrate und der Node-ID verwendet.
Das Modul arbeitet nach den CANopen-Protokollen CiA-DS-301 und DS-402.

Übersicht
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.44
1.2 Zusammenfassung der technischen Daten
1.2.1 Allgemeines
Temperaturbereich max. zulässige Umgebungstemperatur: 0...50 C
Luftfeuchtigkeit max. 90%, nicht kondensierend
Größe der Platine 146,69 mm x 32,0 mm
Gehäuse U-förmiges Alu-Profil, 160 x 39 x 34 mm
Schutzklasse IP10
Gewicht ca. 120 g
Spannungsversorgungs-eingang
UVCC_Nom = 24 V DCUVCC_max = 40 V DC (maximal zulässiger Wert)
I 30 mA (typisch, bei 20 C, Ausgänge unbelastet)
X300: MSTBVA2,5-3G (Steckverbinder auf Leiterplatte)
1.2.2 Mikrocontroller
Microcontroller C505CA
EEPROM 2 KByte (z.B. CAT24WC08)
RAM 1 K + 256 Byte
OTP 32 K
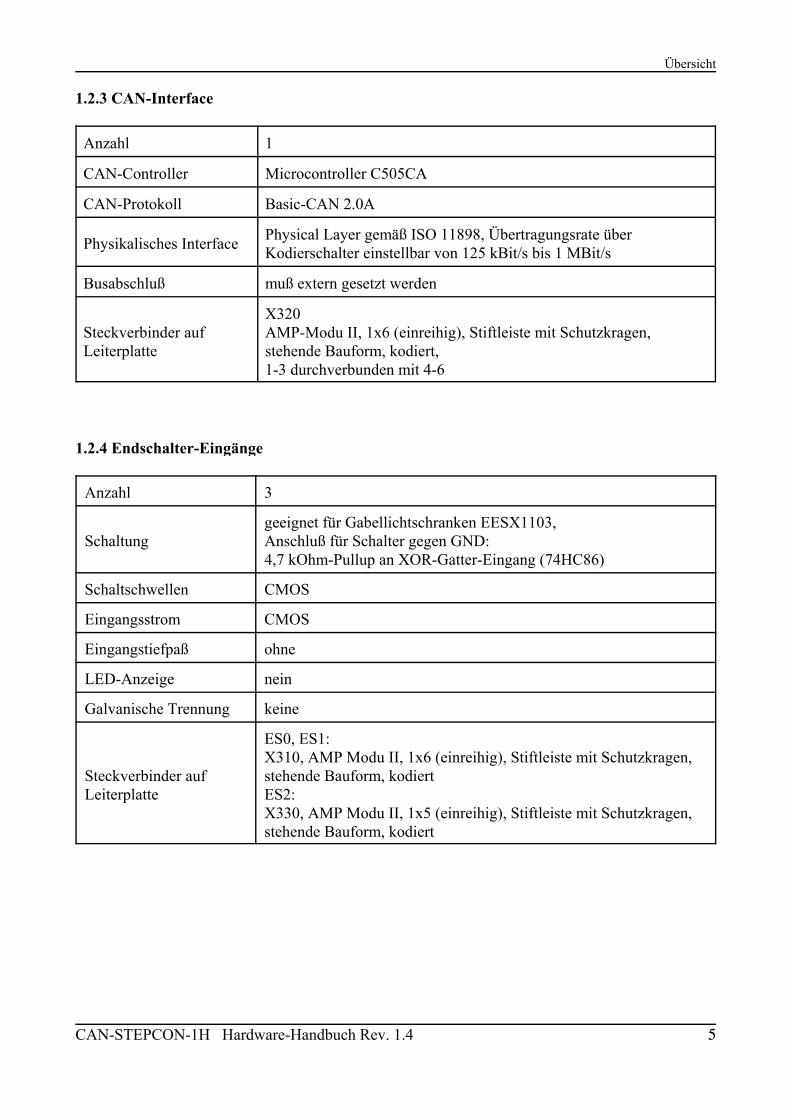
Übersicht
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.4 5
1.2.3 CAN-Interface
Anzahl 1
CAN-Controller Microcontroller C505CA
CAN-Protokoll Basic-CAN 2.0A
Physikalisches Interface Physical Layer gemäß ISO 11898, Übertragungsrate überKodierschalter einstellbar von 125 kBit/s bis 1 MBit/s
Busabschluß muß extern gesetzt werden
Steckverbinder aufLeiterplatte
X320AMP-Modu II, 1x6 (einreihig), Stiftleiste mit Schutzkragen,stehende Bauform, kodiert,1-3 durchverbunden mit 4-6
1.2.4 Endschalter-Eingänge
Anzahl 3
Schaltunggeeignet für Gabellichtschranken EESX1103,Anschluß für Schalter gegen GND:4,7 kOhm-Pullup an XOR-Gatter-Eingang (74HC86)
Schaltschwellen CMOS
Eingangsstrom CMOS
Eingangstiefpaß ohne
LED-Anzeige nein
Galvanische Trennung keine
Steckverbinder aufLeiterplatte
ES0, ES1:X310, AMP Modu II, 1x6 (einreihig), Stiftleiste mit Schutzkragen, stehende Bauform, kodiertES2:X330, AMP Modu II, 1x5 (einreihig), Stiftleiste mit Schutzkragen, stehende Bauform, kodiert
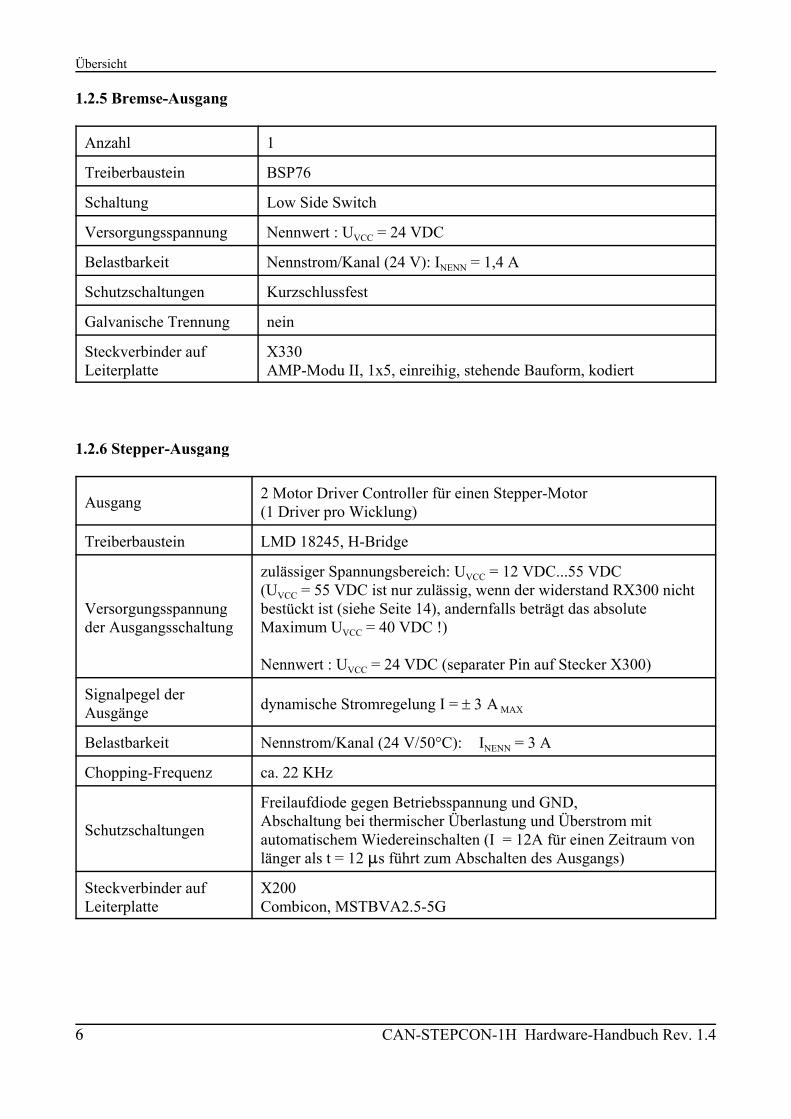
Übersicht
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.46
1.2.5 Bremse-Ausgang
Anzahl 1
Treiberbaustein BSP76
Schaltung Low Side Switch
Versorgungsspannung Nennwert : UVCC = 24 VDC
Belastbarkeit Nennstrom/Kanal (24 V): INENN = 1,4 A
Schutzschaltungen Kurzschlussfest
Galvanische Trennung nein
Steckverbinder aufLeiterplatte
X330AMP-Modu II, 1x5, einreihig, stehende Bauform, kodiert
1.2.6 Stepper-Ausgang
Ausgang 2 Motor Driver Controller für einen Stepper-Motor (1 Driver pro Wicklung)
Treiberbaustein LMD 18245, H-Bridge
Versorgungsspannungder Ausgangsschaltung
zulässiger Spannungsbereich: UVCC = 12 VDC...55 VDC(UVCC = 55 VDC ist nur zulässig, wenn der widerstand RX300 nichtbestückt ist (siehe Seite 14), andernfalls beträgt das absoluteMaximum UVCC = 40 VDC !)
Nennwert : UVCC = 24 VDC (separater Pin auf Stecker X300)
Signalpegel derAusgänge dynamische Stromregelung I = A MAX
Belastbarkeit Nennstrom/Kanal (24 V/50°C): INENN = 3 A
Chopping-Frequenz ca. 22 KHz
Schutzschaltungen
Freilaufdiode gegen Betriebsspannung und GND,Abschaltung bei thermischer Überlastung und Überstrom mitautomatischem Wiedereinschalten (I = 12A für einen Zeitraum vonlänger als t = 12 s führt zum Abschalten des Ausgangs)
Steckverbinder aufLeiterplatte
X200Combicon, MSTBVA2.5-5G
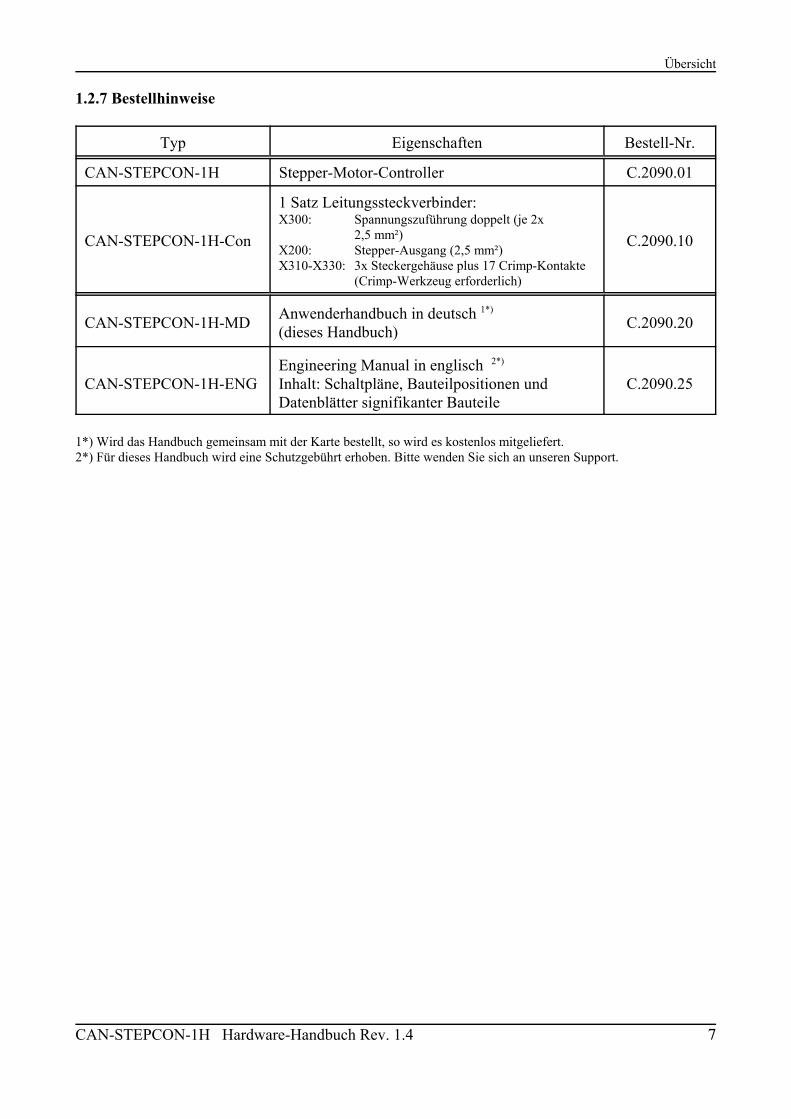
Übersicht
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.4 7
1.2.7 Bestellhinweise
Typ Eigenschaften Bestell-Nr.
CAN-STEPCON-1H Stepper-Motor-Controller C.2090.01
CAN-STEPCON-1H-Con
1 Satz Leitungssteckverbinder:X300: Spannungszuführung doppelt (je 2x
2,5 mm²)X200: Stepper-Ausgang (2,5 mm²)X310-X330: 3x Steckergehäuse plus 17 Crimp-Kontakte
(Crimp-Werkzeug erforderlich)
C.2090.10
CAN-STEPCON-1H-MD Anwenderhandbuch in deutsch 1*)
(dieses Handbuch) C.2090.20
CAN-STEPCON-1H-ENGEngineering Manual in englisch 2*)
Inhalt: Schaltpläne, Bauteilpositionen undDatenblätter signifikanter Bauteile
C.2090.25
1*) Wird das Handbuch gemeinsam mit der Karte bestellt, so wird es kostenlos mitgeliefert.2*) Für dieses Handbuch wird eine Schutzgebührt erhoben. Bitte wenden Sie sich an unseren Support.
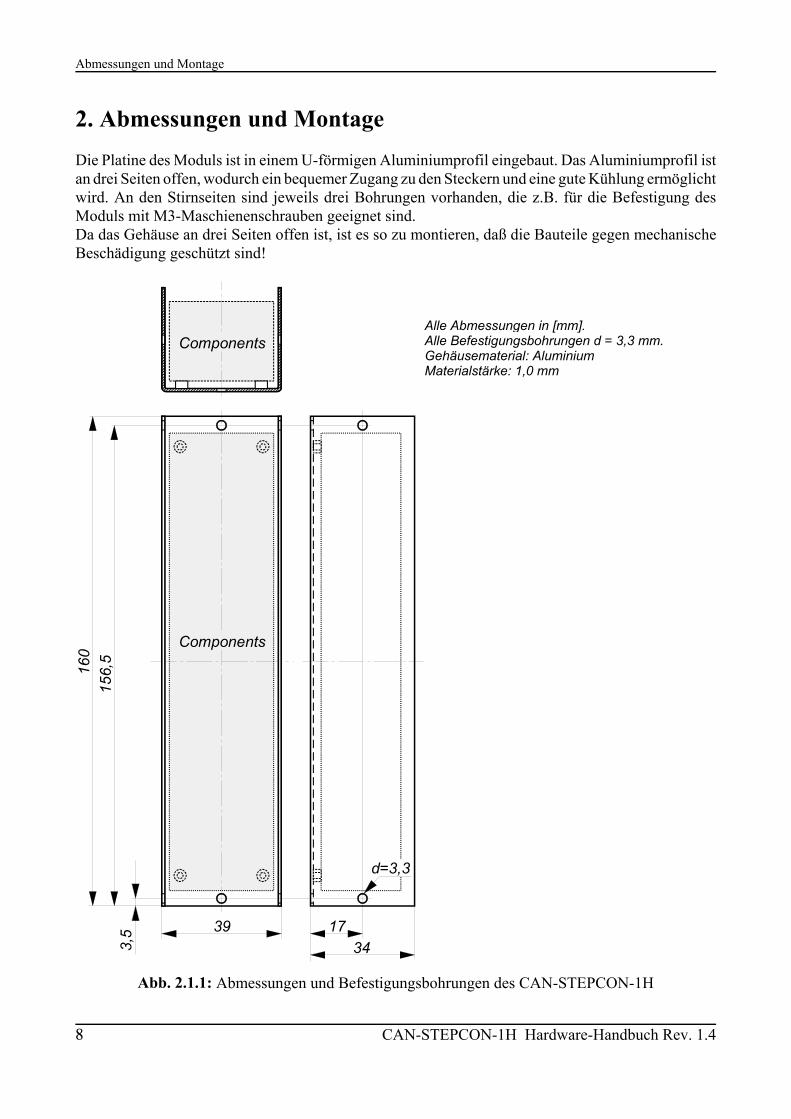
Abmessungen und Montage
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.48
156,
516
0
3,5 39 17
34
d=3,3
Components
Components
2. Abmessungen und MontageDie Platine des Moduls ist in einem U-förmigen Aluminiumprofil eingebaut. Das Aluminiumprofil istan drei Seiten offen, wodurch ein bequemer Zugang zu den Steckern und eine gute Kühlung ermöglichtwird. An den Stirnseiten sind jeweils drei Bohrungen vorhanden, die z.B. für die Befestigung desModuls mit M3-Maschienenschrauben geeignet sind.Da das Gehäuse an drei Seiten offen ist, ist es so zu montieren, daß die Bauteile gegen mechanischeBeschädigung geschützt sind!
Alle Abmessungen in [mm].Alle Befestigungsbohrungen d = 3,3 mm.Gehäusematerial: Aluminium Materialstärke: 1,0 mm
Abb. 2.1.1: Abmessungen und Befestigungsbohrungen des CAN-STEPCON-1H
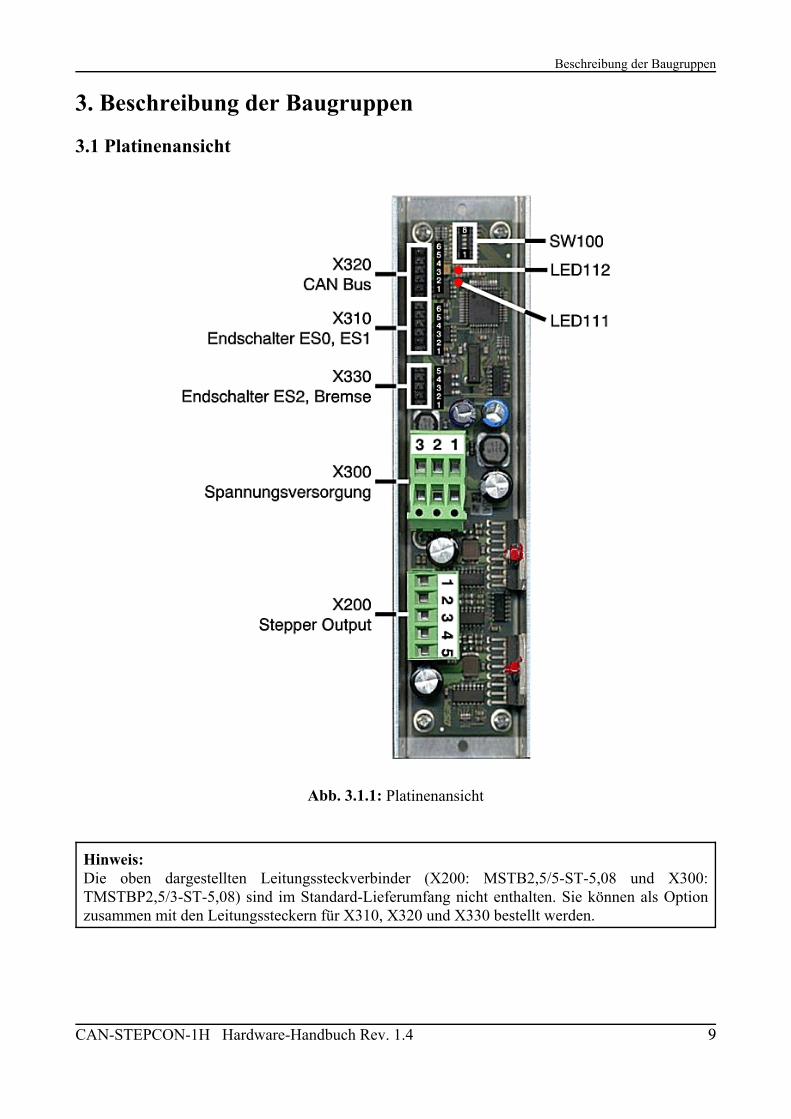
Beschreibung der Baugruppen
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.4 9
3. Beschreibung der Baugruppen
3.1 Platinenansicht
Abb. 3.1.1: Platinenansicht
Hinweis:Die oben dargestellten Leitungssteckverbinder (X200: MSTB2,5/5-ST-5,08 und X300:TMSTBP2,5/3-ST-5,08) sind im Standard-Lieferumfang nicht enthalten. Sie können als Optionzusammen mit den Leitungssteckern für X310, X320 und X330 bestellt werden.

Beschreibung der Baugruppen
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.410
3.2 Kodierschalter SW100
Kodierschalter-Bit-Nr. Bedeutung
8 LSB76 Module-No.543 MSB2
CAN-Baudrate1
Tabelle 3.2.1: Zuordnung der Kodierschalter-Bits
Kodierschalter-Bit-Nr.
Modul-No.-Bit-Nr.
Default-Stellung bei Auslieferung
Schalterstellung Modul-No.-Bit-Wert
8 0 ON 17 1 OFF 06 2 OFF 05 3 OFF 04 4 OFF 03 5 OFF 0
Tabelle 3.2.2: Einstellung der Module-No.
Kodierschalter-BitBaudrate
2 1
OFF OFF1 MBit/s
(Default-Stellungbei Auslieferung)
OFF ON 500 kBit/sON OFF 250 kBit/sON ON 125 kBit/s
Tabelle 3.2.3: Einstellung der Baudrate
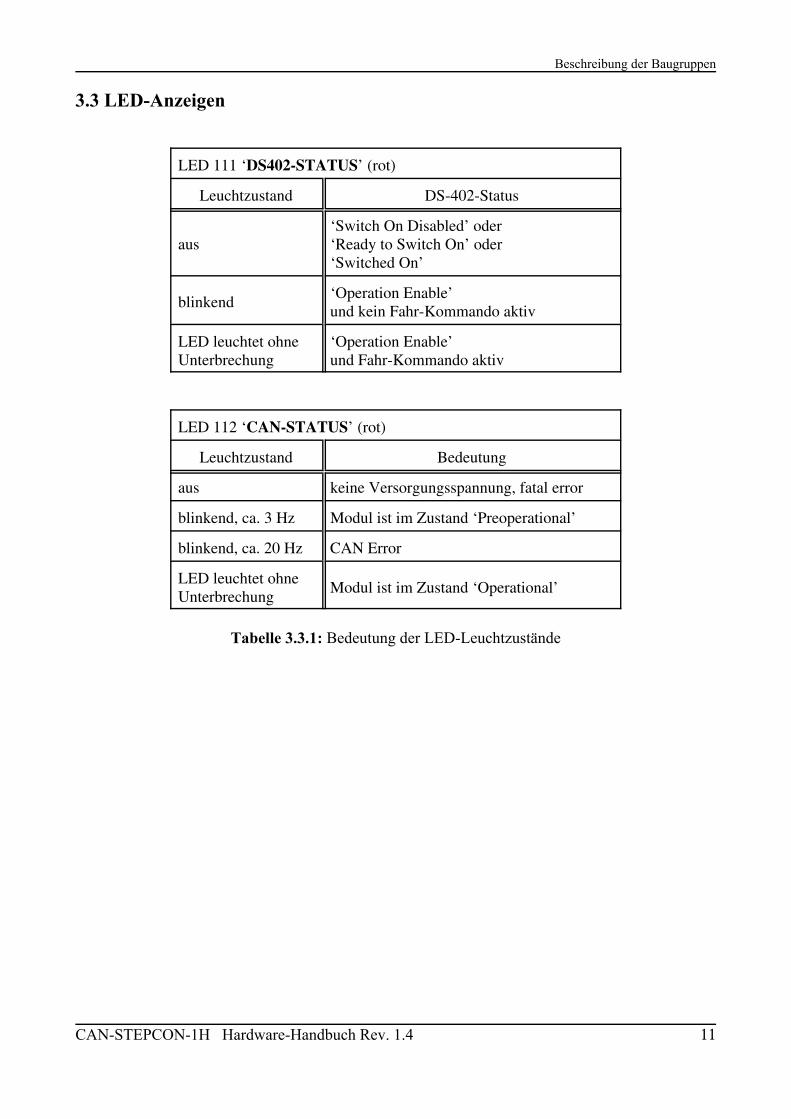
Beschreibung der Baugruppen
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.4 11
3.3 LED-Anzeigen
LED 111 ‘DS402-STATUS’ (rot)
Leuchtzustand DS-402-Status
aus‘Switch On Disabled’ oder‘Ready to Switch On’ oder‘Switched On’
blinkend‘Operation Enable’und kein Fahr-Kommando aktiv
LED leuchtet ohneUnterbrechung
‘Operation Enable’und Fahr-Kommando aktiv
LED 112 ‘CAN-STATUS’ (rot)
Leuchtzustand Bedeutung
aus keine Versorgungsspannung, fatal error
blinkend, ca. 3 Hz Modul ist im Zustand ‘Preoperational’
blinkend, ca. 20 Hz CAN Error
LED leuchtet ohneUnterbrechung
Modul ist im Zustand ‘Operational’
Tabelle 3.3.1: Bedeutung der LED-Leuchtzustände
Beschreibung der Baugruppen
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.412
Diese Seite ist bewußt unbedruckt.
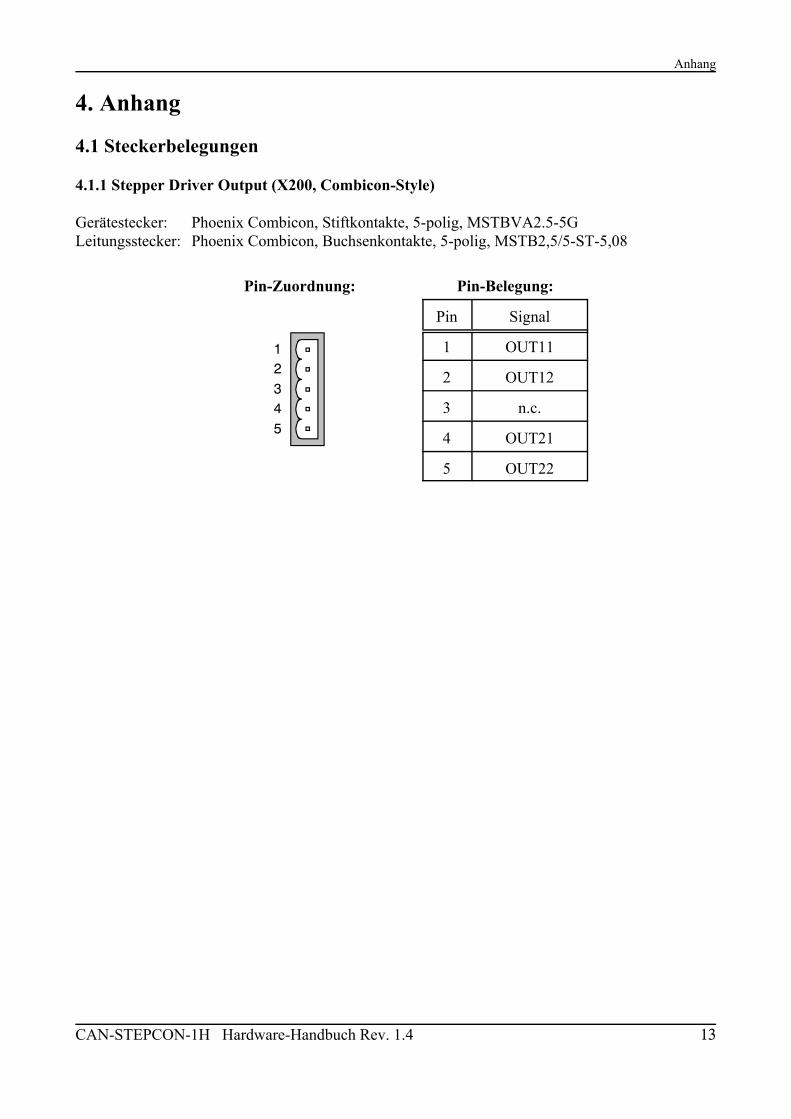
Anhang
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.4 13
12345
4. Anhang
4.1 Steckerbelegungen
4.1.1 Stepper Driver Output (X200, Combicon-Style)
Gerätestecker: Phoenix Combicon, Stiftkontakte, 5-polig, MSTBVA2.5-5GLeitungsstecker: Phoenix Combicon, Buchsenkontakte, 5-polig, MSTB2,5/5-ST-5,08
Pin-Zuordnung: Pin-Belegung:
Pin Signal
1 OUT11
2 OUT12
3 n.c.
4 OUT21
5 OUT22
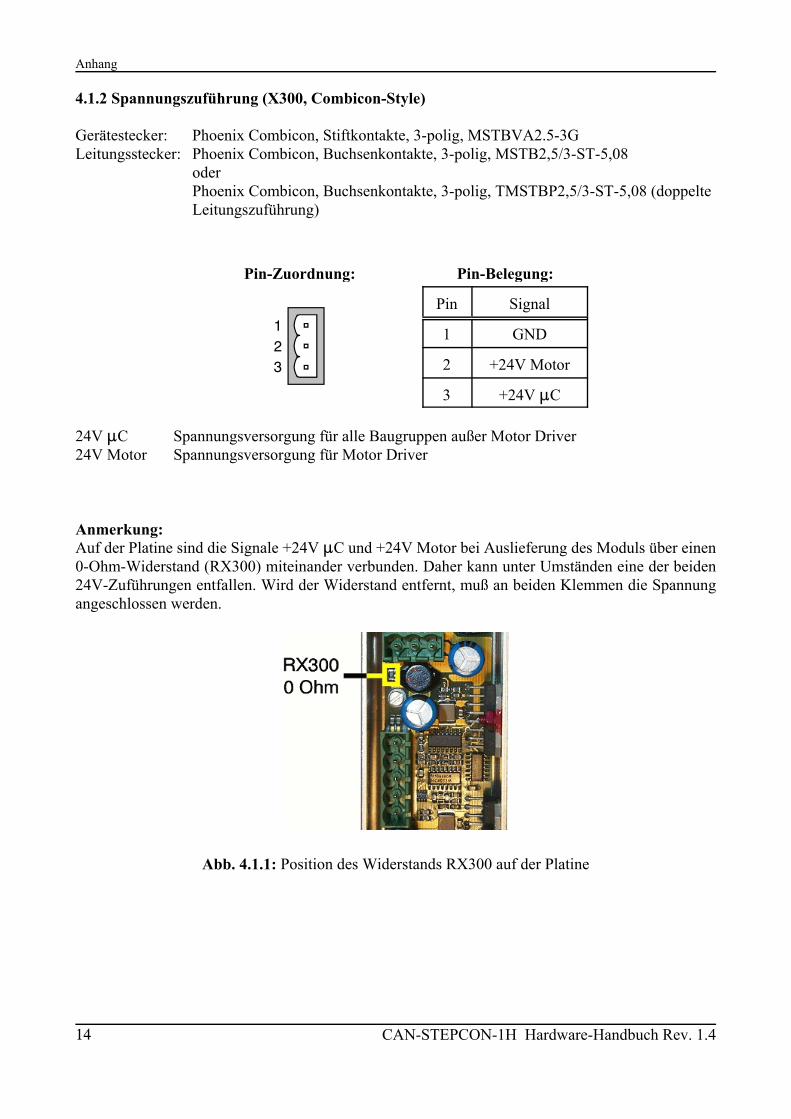
Anhang
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.414
321
4.1.2 Spannungszuführung (X300, Combicon-Style)
Gerätestecker: Phoenix Combicon, Stiftkontakte, 3-polig, MSTBVA2.5-3GLeitungsstecker: Phoenix Combicon, Buchsenkontakte, 3-polig, MSTB2,5/3-ST-5,08
oderPhoenix Combicon, Buchsenkontakte, 3-polig, TMSTBP2,5/3-ST-5,08 (doppelteLeitungszuführung)
Pin-Zuordnung: Pin-Belegung:
Pin Signal
1 GND
2 +24V Motor
3 +24V C
24V C Spannungsversorgung für alle Baugruppen außer Motor Driver24V Motor Spannungsversorgung für Motor Driver
Anmerkung:Auf der Platine sind die Signale +24V C und +24V Motor bei Auslieferung des Moduls über einen0-Ohm-Widerstand (RX300) miteinander verbunden. Daher kann unter Umständen eine der beiden24V-Zuführungen entfallen. Wird der Widerstand entfernt, muß an beiden Klemmen die Spannungangeschlossen werden.
Abb. 4.1.1: Position des Widerstands RX300 auf der Platine
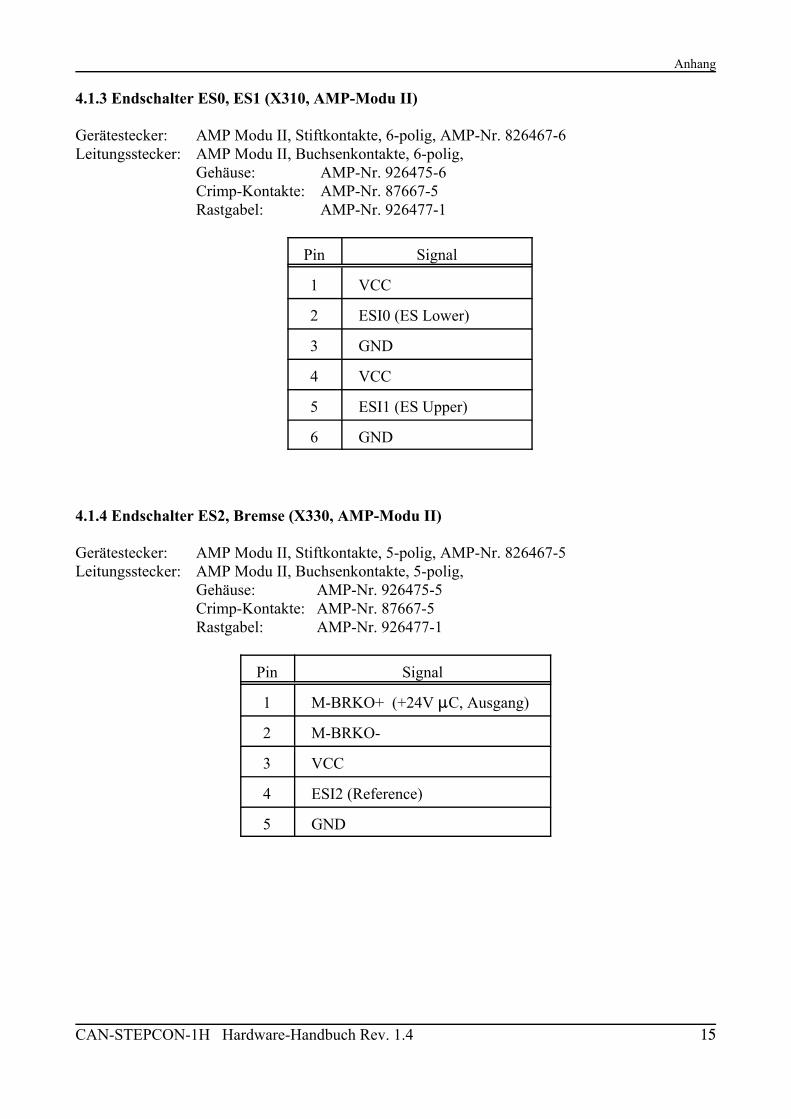
Anhang
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.4 15
4.1.3 Endschalter ES0, ES1 (X310, AMP-Modu II)
Gerätestecker: AMP Modu II, Stiftkontakte, 6-polig, AMP-Nr. 826467-6Leitungsstecker: AMP Modu II, Buchsenkontakte, 6-polig,
Gehäuse: AMP-Nr. 926475-6Crimp-Kontakte: AMP-Nr. 87667-5Rastgabel: AMP-Nr. 926477-1
Pin Signal
1 VCC
2 ESI0 (ES Lower)
3 GND
4 VCC
5 ESI1 (ES Upper)
6 GND
4.1.4 Endschalter ES2, Bremse (X330, AMP-Modu II)
Gerätestecker: AMP Modu II, Stiftkontakte, 5-polig, AMP-Nr. 826467-5Leitungsstecker: AMP Modu II, Buchsenkontakte, 5-polig,
Gehäuse: AMP-Nr. 926475-5Crimp-Kontakte: AMP-Nr. 87667-5Rastgabel: AMP-Nr. 926477-1
Pin Signal
1 M-BRKO+ (+24V C, Ausgang)
2 M-BRKO-
3 VCC
4 ESI2 (Reference)
5 GND
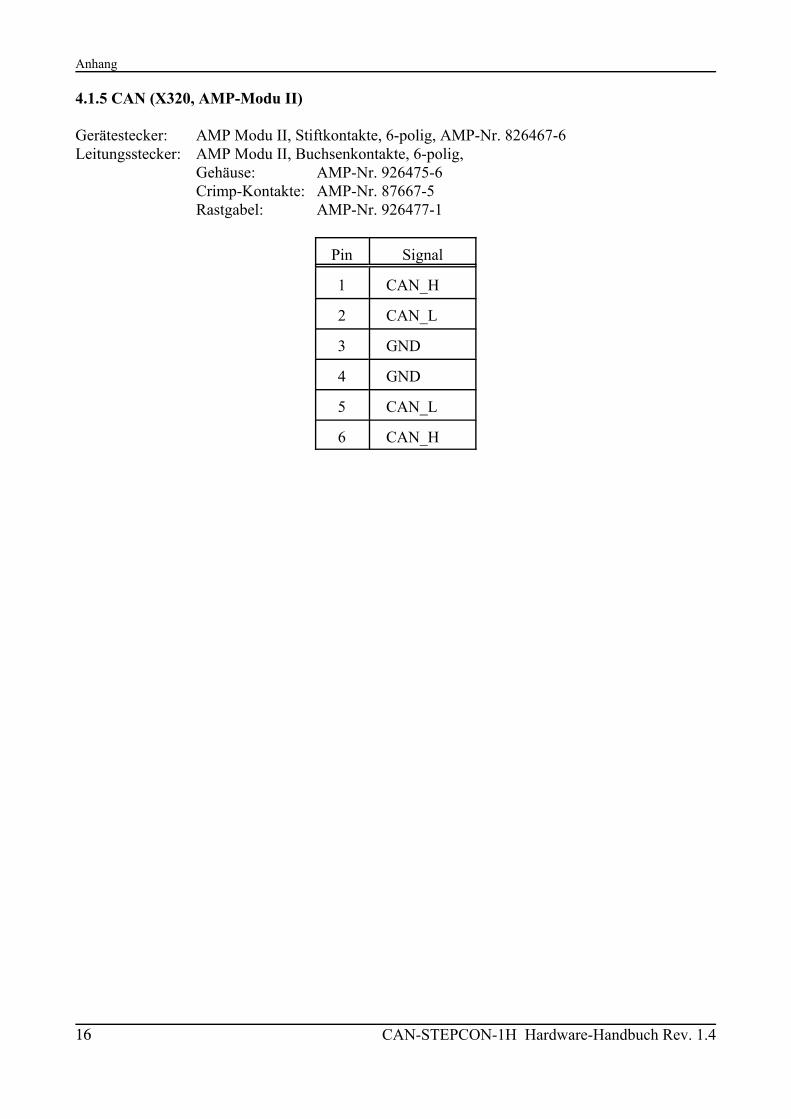
Anhang
CAN-STEPCON-1H Hardware-Handbuch Rev. 1.416
4.1.5 CAN (X320, AMP-Modu II)
Gerätestecker: AMP Modu II, Stiftkontakte, 6-polig, AMP-Nr. 826467-6Leitungsstecker: AMP Modu II, Buchsenkontakte, 6-polig,
Gehäuse: AMP-Nr. 926475-6Crimp-Kontakte: AMP-Nr. 87667-5Rastgabel: AMP-Nr. 926477-1
Pin Signal
1 CAN_H
2 CAN_L
3 GND
4 GND
5 CAN_L
6 CAN_H
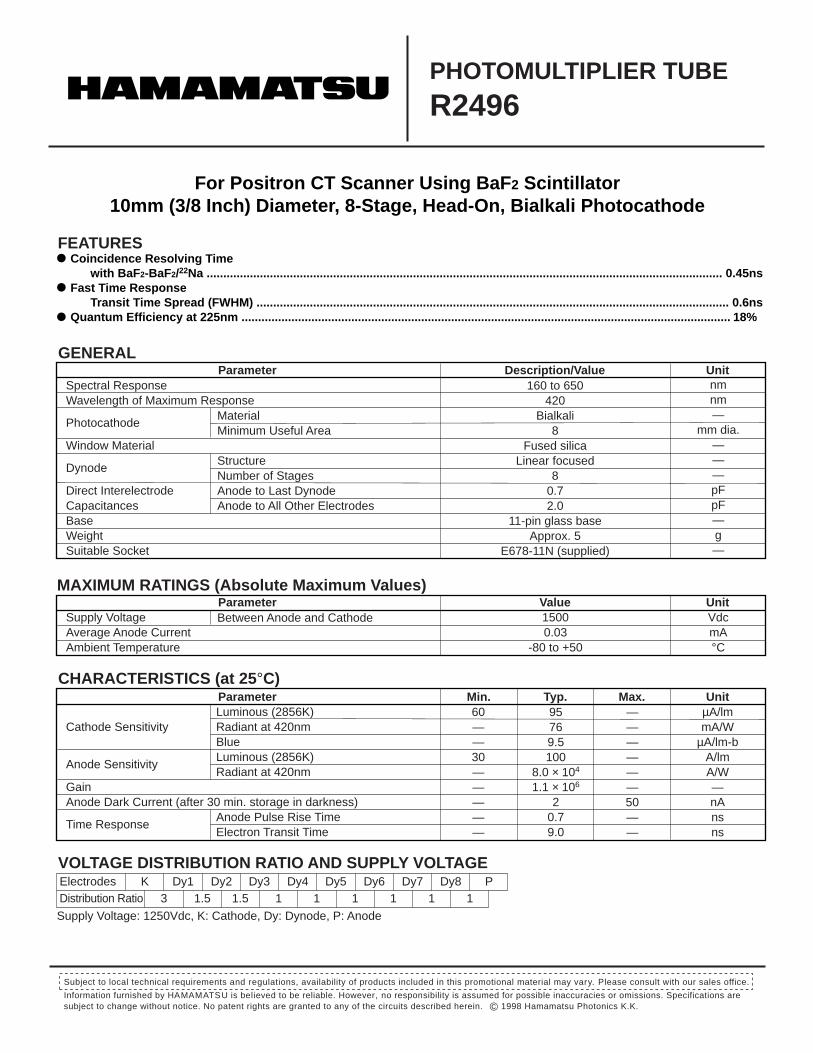
GENERALParameter Description/Value Unit
Spectral ResponseWavelength of Maximum Response
Photocathode
Window Material
Dynode
Direct InterelectrodeCapacitancesBaseWeightSuitable Socket
nmnm—
mm dia.———pFpF—g—
160 to 650420
Bialkali8
Fused silicaLinear focused
80.72.0
11-pin glass baseApprox. 5
E678-11N (supplied)
MaterialMinimum Useful Area
StructureNumber of StagesAnode to Last DynodeAnode to All Other Electrodes
PHOTOMULTIPLIER TUBE
R2496
MAXIMUM RATINGS (Absolute Maximum Values)
Information furnished by HAMAMATSU is believed to be reliable. However, no responsibility is assumed for possible inaccuracies or omissions. Specifications are subject to change without notice. No patent rights are granted to any of the circuits described herein. © 1998 Hamamatsu Photonics K.K.
Subject to local technical requirements and regulations, availability of products included in this promotional material may vary. Please consult with our sales office.
For Positron CT Scanner Using BaF2 Scintillator10mm (3/8 Inch) Diameter, 8-Stage, Head-On, Bialkali Photocathode
CHARACTERISTICS (at 25°C)Parameter Min. Unit
Parameter Value UnitSupply VoltageAverage Anode CurrentAmbient Temperature
15000.03
-80 to +50
VdcmA°C
Between Anode and Cathode
Cathode Sensitivity
Anode Sensitivity
GainAnode Dark Current (after 30 min. storage in darkness)
Time Response
Luminous (2856K)Radiant at 420nmBlueLuminous (2856K)Radiant at 420nm
Anode Pulse Rise TimeElectron Transit Time
60——30—————
95769.5100
8.0 × 104
1.1 × 106
20.79.0
µA/lmmA/W
µA/lm-bA/lmA/W—nAnsns
——————50——
Typ. Max.
Supply Voltage: 1250Vdc, K: Cathode, Dy: Dynode, P: Anode
VOLTAGE DISTRIBUTION RATIO AND SUPPLY VOLTAGEElectrodesDistribution Ratio
K Dy13
Dy21.5
Dy31.5
Dy41
Dy51
Dy61
Dy71
Dy81
P1
FEATURES Coincidence Resolving Time with BaF2-BaF2/22Na ........................................................................................................................................................... 0.45ns Fast Time Response Transit Time Spread (FWHM) .............................................................................................................................................. 0.6ns Quantum Efficiency at 225nm ................................................................................................................................................... 18%
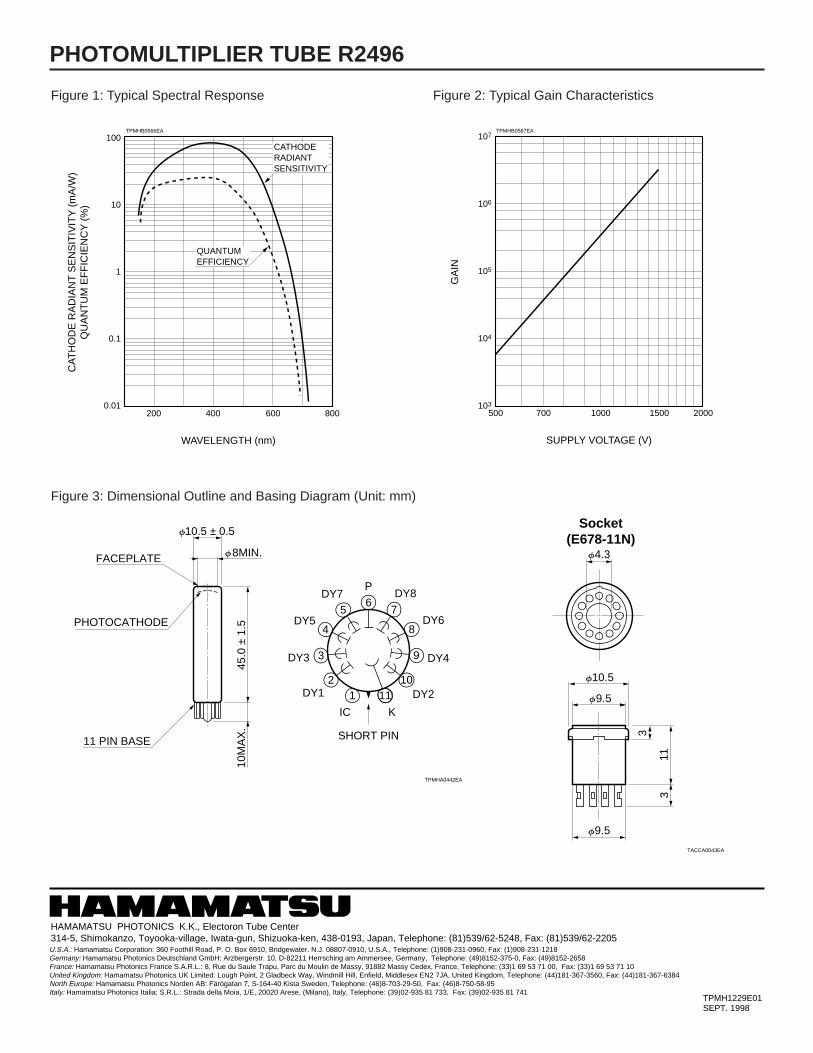
PHOTOMULTIPLIER TUBE R2496
Figure 1: Typical Spectral Response
TPMH1229E01SEPT. 1998
HAMAMATSU PHOTONICS K.K., Electoron Tube Center 314-5, Shimokanzo, Toyooka-village, Iwata-gun, Shizuoka-ken, 438-0193, Japan, Telephone: (81)539/62-5248, Fax: (81)539/62-2205U.S.A.: Hamamatsu Corporation: 360 Foothill Road, P. O. Box 6910, Bridgewater. N.J. 08807-0910, U.S.A., Telephone: (1)908-231-0960, Fax: (1)908-231-1218Germany: Hamamatsu Photonics Deutschland GmbH: Arzbergerstr. 10, D-82211 Herrsching am Ammersee, Germany, Telephone: (49)8152-375-0, Fax: (49)8152-2658France: Hamamatsu Photonics France S.A.R.L.: 8, Rue du Saule Trapu, Parc du Moulin de Massy, 91882 Massy Cedex, France, Telephone: (33)1 69 53 71 00, Fax: (33)1 69 53 71 10United Kingdom: Hamamatsu Photonics UK Limited: Lough Point, 2 Gladbeck Way, Windmill Hill, Enfield, Middlesex EN2 7JA, United Kingdom, Telephone: (44)181-367-3560, Fax: (44)181-367-6384North Europe: Hamamatsu Photonics Norden AB: Färögatan 7, S-164-40 Kista Sweden, Telephone: (46)8-703-29-50, Fax: (46)8-750-58-95Italy: Hamamatsu Photonics Italia: S.R.L.: Strada della Moia, 1/E, 20020 Arese, (Milano), Italy, Telephone: (39)02-935 81 733, Fax: (39)02-935 81 741
TPMHB0566EA
Figure 2: Typical Gain Characteristics
TPMHB0567EA
Figure 3: Dimensional Outline and Basing Diagram (Unit: mm)
TPMHA0442EA
TACCA0043EA
Socket(E678-11N)
4.3
9.5
10.511
3
3
9.5
100
10
1
0.1
0.01200 600 800400
WAVELENGTH (nm)
CA
TH
OD
E R
AD
IAN
T S
EN
SIT
IVIT
Y (
mA
/W)
QU
AN
TU
M E
FF
ICIE
NC
Y (
%)
CATHODERADIANTSENSITIVITY
QUANTUMEFFICIENCY
12
3
4
56
7
8
9
1011
IC
DY1
DY3
DY5
DY7P
DY8
DY6
DY4
DY2
K
SHORT PIN
FACEPLATE
PHOTOCATHODE
11 PIN BASE
8MIN.
10M
AX
.45
.0 ±
1.5
10.5 ± 0.5
107
106
105
104
103
500 1000700 1500 2000
SUPPLY VOLTAGE (V)G
AIN
2/3"-IT-CCD-Monochrom-Kamera JAI M300
www.stemmer-imaging.com
kamerasflächenkameras monochromflächenkameras farbezeilenkameras
JAI M300, der LichtminimalistDie Kamera M300 ist durch ihre hohe Lichtempfindlichkeit von0,05 Lux der Spezialist für schlechte Beleuchtungsverhältnisse. Ver-schiedene Trigger-Modi, die Fähigkeit zu Langzeitintegration undexterner Synchronisierung machen die JAI M300 zu einer universelleinsetzbaren monochromen 2/3"-Standard-Video-CCD-Kamera. AufKundenwunsch ist die JAI M300 auch mit einem Winkelkopf erhält-lich, um den Einbau in beengten Einbauräumen zu ermöglichen.
Die 2/3"-IT-CCD-Monochrom-Kameras aus der JAI M-SerieNeuer 2/3"-Hyper-HAD-Sensor mit 752 (H) x 582 (V) (CCIR) bzw.768 (H) x 494 (V) (EIA) Bildpunkten, größerer Dynamik und ver-bessertem »Smear«-VerhaltenHD/VD-Ausgang oder -EingangPixelsynchrones Arbeiten möglichEinfache Blitzsynchronisation über EEN-Puls (Exposure Enable)Extrem günstiges Preis-/LeistungsverhältnisIndustriegehäuse identisch mit M10, M30, M40, M50 und M1Langzeitintegration über externes VD-Signal
Trigger-Modus EDGE PRE-SELECTDie fallende Flanke des Trigger-In löst sofort den Reset des CCD-Sensors aus und startet die voreingestellte Integrationszeit. DerWEN-Puls zeigt anschließend den Start des Auslesevorgangs an.
Trigger-Modus PULSE WIDTH CONTROLDie Pulslänge des Trigger-In steuert die Dauer der Integrationszeit.Die fallende Flanke startet, die steigende Flanke stoppt die Integra-tion. Der WEN-Puls zeigt dann den Start des Auslesevorgangs an.
Trigger-Modus START/STOPIntegrations- und Auslesezeitpunkt können über eine externeTrigger/VD-Kombination gesteuert werden. Die fallende Flanke desexternen Triggers startet die Integration. Mit der fallenden Flankeeines extern gelieferten VD wird die Integration beendet.
Trigger-Modus LONGTIME EXPOSUREIm Langzeit-Integrations-Modus wird die Dauer der Integrationdurch den Abstand zweier externer VDs bestimmt:
Frame-Accumulation-Modus, 2:1 Interlaced: Das erste externeVD-Signal startet die Integration der geraden Zeilen und 20 ms(1 VD) später der ungeraden Zeilen. Das zweite VD-Signal beendetdie Integration, und die Ausgabe der Halbbilder erfolgt.
Field-Accumulation-Modus, 2:1 Interlaced: Das erste externe VD-Signal startet die gleichzeitige Integration von geraden undungeraden Zeilen. Nach dem zweiten VD werden die summiertenLadungen in einem Halbbild ausgegeben (20 ms).
Vier Random-Trigger-Modi

K-JAI
12-0
8/20
04. T
echn
ische
Änd
erun
gen u
nd Fe
hler v
orbe
halte
n.
spezifikationen
ccd-sensor 2/3" IT-Hyper-HAD-Sensor
bildelemente 752 (H) x 582 (V) CCIR768 (H) x 494 (V) EIA
pixelgrösse 11,6 µm (H) x 11,2 µm (V) CCIR / 11,6 µm (H) x 13,5 µm (V) EIA
auflösung 560 TV-Linien horizontal CCIR / 570 TV-Linien horizontal EIA
empfindlichkeit 0,05 Lux bei F=1,4; AGC on
video-output 1,0 Vp-p, 75 Ohm2:1 interlaced oder non-interlaced (Halbbildauflösung)
s/n-ratio mind. 59 dB (AGC off, Gamma = 1)
synchronisation Intern oder extern mit HD/VD oder Random-Trigger
shutter Off, On 1/100 bis 1/10.000 s
trigger-shutter 1/50 bis 1/10.000 s CCIR, 1/60 bis 1/10.000 s EIA Trigger-Pulsweite min. 1 HD (neg.)
besonderheiten Pixelclock-AusgangAsynchroner Shutter durch Edge Pre-Select-TriggerPulse Width ControlledVariable Integrationszeitsteuerung über Start/Stop-TriggerLangzeitintegration über externes VD-SignalEEN-Puls (Ausgabe der effekt. Belichtungszeit) WEN-Puls (Start des Auslesevorgangs)
gamma 1 oder 0,45 (Off/On)
bedienung DIP-Schalter, Drehschalter (Kamera-Rückwand)
anschluss 12-Pol und 6-Pol Hirose, BNC
objektivanschluss C-Mount
temperaturbereich -5 °C bis +45 °C
luftfeuchtigkeit 20% bis 80%
stromversorgung 12 VDC, 3,6 W
abmessungen 40 x 50 x 80 (H x B x T in mm)
gewicht 230 g
Technische Daten
Abmessungen der JAI M300
12-Pin Stecker DC/SYNC IN 6-Pin Stecker TRIGGER
Pin Signal Pin Signal1 Ground 1 N.C.2 +12 VDC In 2 EEN-Pulse Out3 Ground 3 Ground4 Video Output 4 N.C.5 Ground 5 Ext. Trigger In6 HD In oder HD Out 6 WEN-Pulse Out7 VD In oder VD Out / WEN Out8 Ground9 Clock Out
10 Ground11 +12 VDC In12 Ground
Frontansicht Seitenansicht Rückansicht
Anschlussbelegung
Bedienung
2/3"-IT-CCD-Monochrom-Kamera JAI M300
alle Angaben in mm
Unterseite
www.stemmer-imaging.comDeutschland: Gutenbergstr. 11 . D-82178 Puchheim . Telefon +49 (0)89 / 80 90 2-0 . Fax +49 (0)89 / 80 90 2-116Schweiz: Rietbrunnen 48 . CH-8808 Pfäffikon . Telefon +41 (0)55 415 90 90 . Fax +41 (0)55 415 90 91
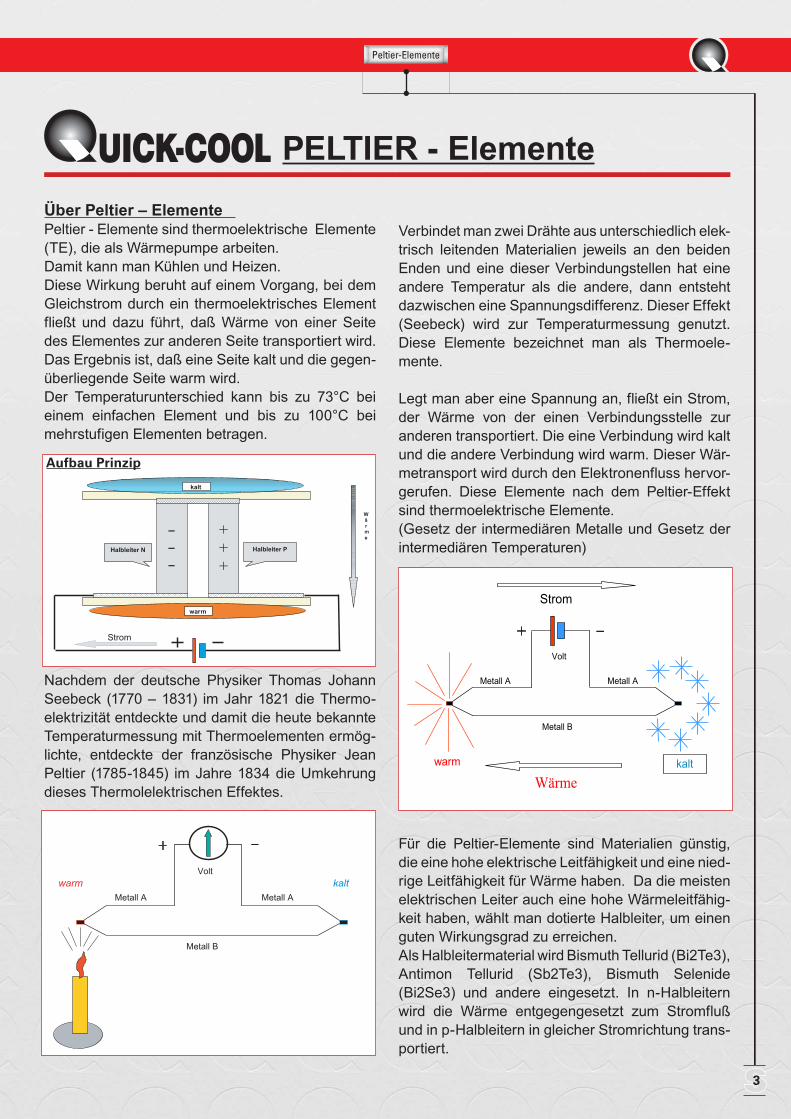
Peltier-Elemente
3
Verbindet man zwei Drähte aus unterschiedlich elek-trisch leitenden Materialien jeweils an den beiden Enden und eine dieser Verbindungstellen hat eine andere Temperatur als die andere, dann entsteht dazwischen eine Spannungsdifferenz. Dieser Effekt (Seebeck) wird zur Temperaturmessung genutzt. Diese Elemente bezeichnet man als Thermoele-mente.
Legt man aber eine Spannung an, fließt ein Strom, der Wärme von der einen Verbindungsstelle zur anderen transportiert. Die eine Verbindung wird kalt und die andere Verbindung wird warm. Dieser Wär-metransport wird durch den Elektronenfluss hervor-gerufen. Diese Elemente nach dem Peltier-Effekt sind thermoelektrische Elemente. (Gesetz der intermediären Metalle und Gesetz der intermediären Temperaturen)
Für die Peltier-Elemente sind Materialien günstig, die eine hohe elektrische Leitfähigkeit und eine nied-rige Leitfähigkeit für Wärme haben. Da die meisten elektrischen Leiter auch eine hohe Wärmeleitfähig-keit haben, wählt man dotierte Halbleiter, um einen guten Wirkungsgrad zu erreichen.Als Halbleitermaterial wird Bismuth Tellurid (Bi2Te3), Antimon Tellurid (Sb2Te3), Bismuth Selenide (Bi2Se3) und andere eingesetzt. In n-Halbleitern wird die Wärme entgegengesetzt zum Stromfluß und in p-Halbleitern in gleicher Stromrichtung trans-portiert.
warm kalt
Volt
Metall A Metall A
Metall B
Volt
Metall A Metall A
Metall B
Strom
Wärme
warm kalt
Über Peltier – Elemente Peltier - Elemente sind thermoelektrische Elemente (TE), die als Wärmepumpe arbeiten.Damit kann man Kühlen und Heizen.Diese Wirkung beruht auf einem Vorgang, bei dem Gleichstrom durch ein thermoelektrisches Element fließt und dazu führt, daß Wärme von einer Seite des Elementes zur anderen Seite transportiert wird.Das Ergebnis ist, daß eine Seite kalt und die gegen-überliegende Seite warm wird.Der Temperaturunterschied kann bis zu 73°C bei einem einfachen Element und bis zu 100°C bei mehrstufigen Elementen betragen.
Nachdem der deutsche Physiker Thomas Johann Seebeck (1770 – 1831) im Jahr 1821 die Thermo-elektrizität entdeckte und damit die heute bekannte Temperaturmessung mit Thermoelementen ermög-lichte, entdeckte der französische Physiker Jean Peltier (1785-1845) im Jahre 1834 die Umkehrung dieses Thermolelektrischen Effektes.
PELTIER - Elemente
Halbleiter N Halbleiter P
kalt
warm
Strom
ä
r
m
e
W
Aufbau Prinzip
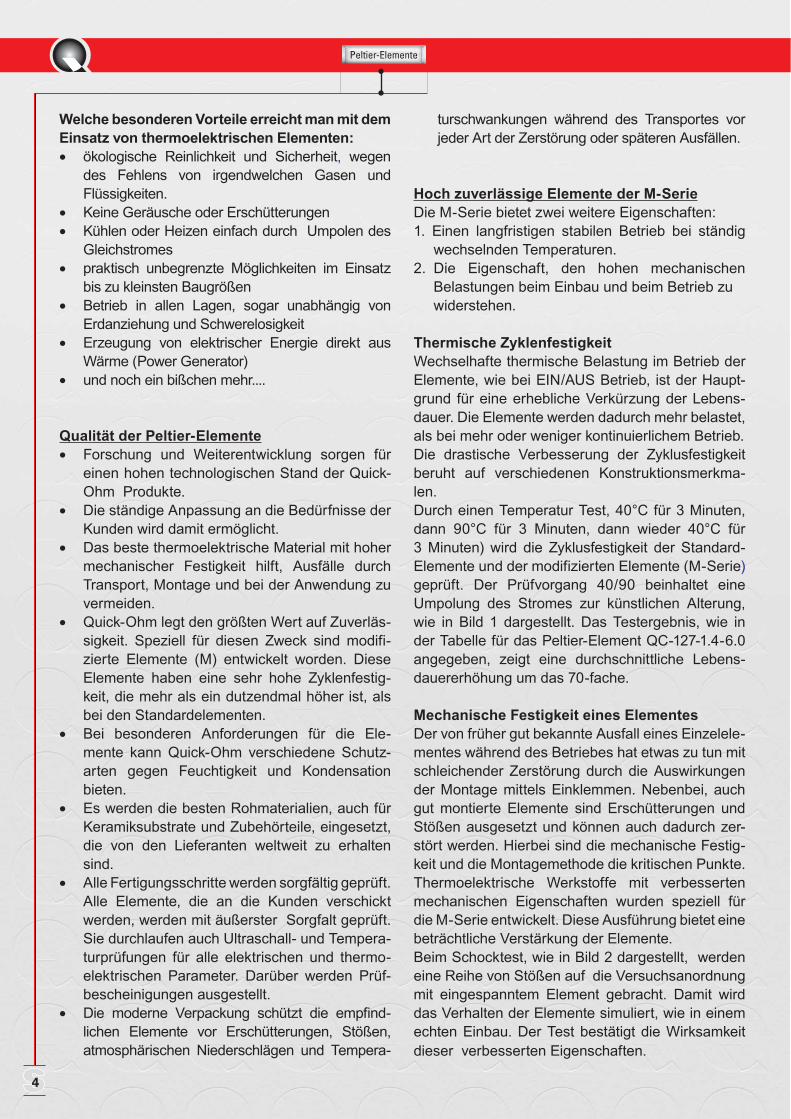
Peltier-Elemente
4
Welche besonderen Vorteile erreicht man mit dem Einsatz von thermoelektrischen Elementen:• ökologische Reinlichkeit und Sicherheit, wegen
des Fehlens von irgendwelchen Gasen und Flüssigkeiten.
• Keine Geräusche oder Erschütterungen• Kühlen oder Heizen einfach durch Umpolen des
Gleichstromes• praktisch unbegrenzte Möglichkeiten im Einsatz
bis zu kleinsten Baugrößen• Betrieb in allen Lagen, sogar unabhängig von
Erdanziehung und Schwerelosigkeit• Erzeugung von elektrischer Energie direkt aus
Wärme (Power Generator)• und noch ein bißchen mehr....
Qualität der Peltier-Elemente• Forschung und Weiterentwicklung sorgen für
einen hohen technologischen Stand der Quick-Ohm Produkte.
• Die ständige Anpassung an die Bedürfnisse der Kunden wird damit ermöglicht.
• Das beste thermoelektrische Material mit hoher mechanischer Festigkeit hilft, Ausfälle durch Transport, Montage und bei der Anwendung zu vermeiden.
• Quick-Ohm legt den größten Wert auf Zuverläs-sigkeit. Speziell für diesen Zweck sind modifi-zierte Elemente (M) entwickelt worden. Diese Elemente haben eine sehr hohe Zyklenfestig-keit, die mehr als ein dutzendmal höher ist, als bei den Standardelementen.
• Bei besonderen Anforderungen für die Ele-mente kann Quick-Ohm verschiedene Schutz-arten gegen Feuchtigkeit und Kondensation bieten.
• Es werden die besten Rohmaterialien, auch für Keramiksubstrate und Zubehörteile, eingesetzt, die von den Lieferanten weltweit zu erhalten sind.
• Alle Fertigungsschritte werden sorgfältig geprüft. Alle Elemente, die an die Kunden verschickt werden, werden mit äußerster Sorgfalt geprüft. Sie durchlaufen auch Ultraschall- und Tempera-turprüfungen für alle elektrischen und thermo-elektrischen Parameter. Darüber werden Prüf-bescheinigungen ausgestellt.
• Die moderne Verpackung schützt die empfind-lichen Elemente vor Erschütterungen, Stößen, atmosphärischen Niederschlägen und Tempera-
turschwankungen während des Transportes vor jeder Art der Zerstörung oder späteren Ausfällen.
Hoch zuverlässige Elemente der M-SerieDie M-Serie bietet zwei weitere Eigenschaften:1. Einen langfristigen stabilen Betrieb bei ständig wechselnden Temperaturen. 2. Die Eigenschaft, den hohen mechanischen Belastungen beim Einbau und beim Betrieb zu widerstehen.
Thermische ZyklenfestigkeitWechselhafte thermische Belastung im Betrieb der Elemente, wie bei EIN/AUS Betrieb, ist der Haupt-grund für eine erhebliche Verkürzung der Lebens-dauer. Die Elemente werden dadurch mehr belastet, als bei mehr oder weniger kontinuierlichem Betrieb.Die drastische Verbesserung der Zyklusfestigkeit beruht auf verschiedenen Konstruktionsmerkma-len. Durch einen Temperatur Test, 40°C für 3 Minuten, dann 90°C für 3 Minuten, dann wieder 40°C für 3 Minuten) wird die Zyklusfestigkeit der Standard-Elemente und der modifizierten Elemente (M-Serie) geprüft. Der Prüfvorgang 40/90 beinhaltet eine Umpolung des Stromes zur künstlichen Alterung, wie in Bild 1 dargestellt. Das Testergebnis, wie in der Tabelle für das Peltier-Element QC-127-1.4-6.0 angegeben, zeigt eine durchschnittliche Lebens-dauererhöhung um das 70-fache.
Mechanische Festigkeit eines ElementesDer von früher gut bekannte Ausfall eines Einzelele-mentes während des Betriebes hat etwas zu tun mit schleichender Zerstörung durch die Auswirkungen der Montage mittels Einklemmen. Nebenbei, auch gut montierte Elemente sind Erschütterungen und Stößen ausgesetzt und können auch dadurch zer-stört werden. Hierbei sind die mechanische Festig-keit und die Montagemethode die kritischen Punkte. Thermoelektrische Werkstoffe mit verbesserten mechanischen Eigenschaften wurden speziell für die M-Serie entwickelt. Diese Ausführung bietet eine beträchtliche Verstärkung der Elemente. Beim Schocktest, wie in Bild 2 dargestellt, werden eine Reihe von Stößen auf die Versuchsanordnung mit eingespanntem Element gebracht. Damit wird das Verhalten der Elemente simuliert, wie in einem echten Einbau. Der Test bestätigt die Wirksamkeit dieser verbesserten Eigenschaften.
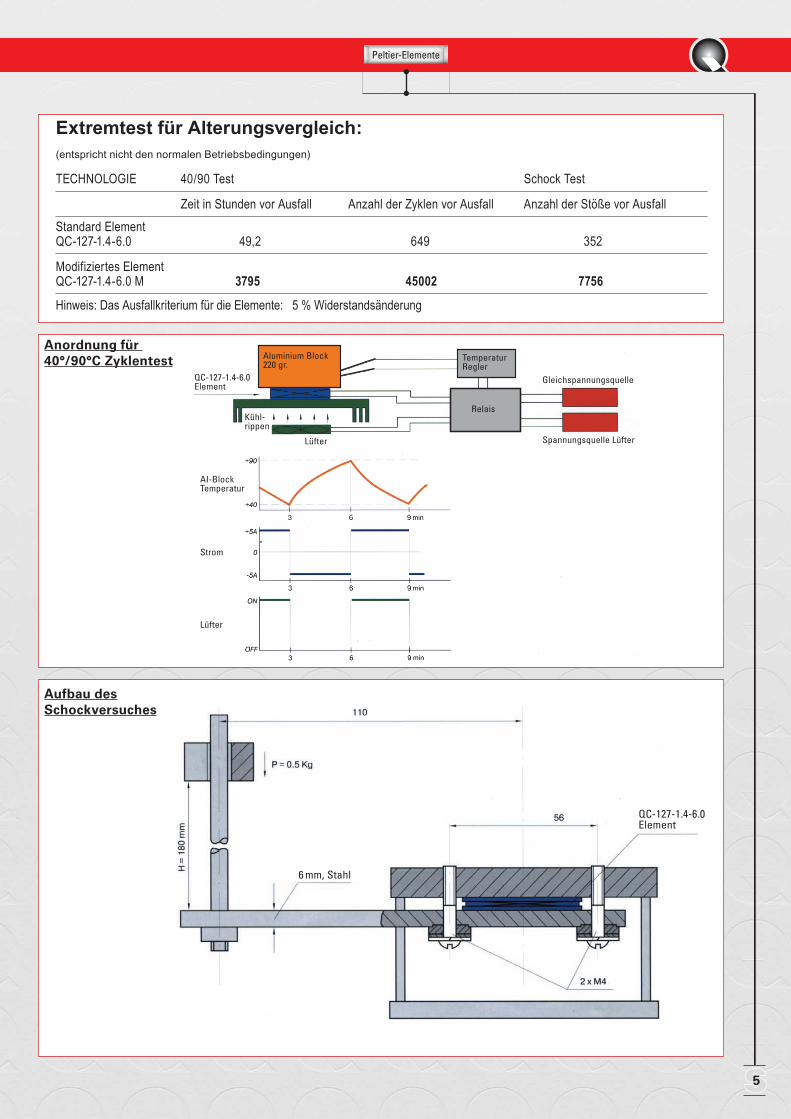
Peltier-Elemente
5
Extremtest für Alterungsvergleich:(entspricht nicht den normalen Betriebsbedingungen)
TECHNOLOGIE 40/90 Test Schock Test
Zeit in Stunden vor Ausfall Anzahl der Zyklen vor Ausfall Anzahl der Stöße vor AusfallStandard Element QC-127-1.4-6.0 49,2 649 352
Modifiziertes Element QC-127-1.4-6.0 M 3795 45002 7756
Hinweis: Das Ausfallkriterium für die Elemente: 5 % Widerstandsänderung
Anordnung für
40°/90°C Zyklentest
Aufbau des
Schockversuches
AI-BlockTemperatur
Strom
Lüfter
Kühl-rippen
QC-127-1.4-6.0Element
Lüfter
Aluminium Block220 gr.
TemperaturRegler
Relais
Gleichspannungsquelle
Spannungsquelle Lüfter
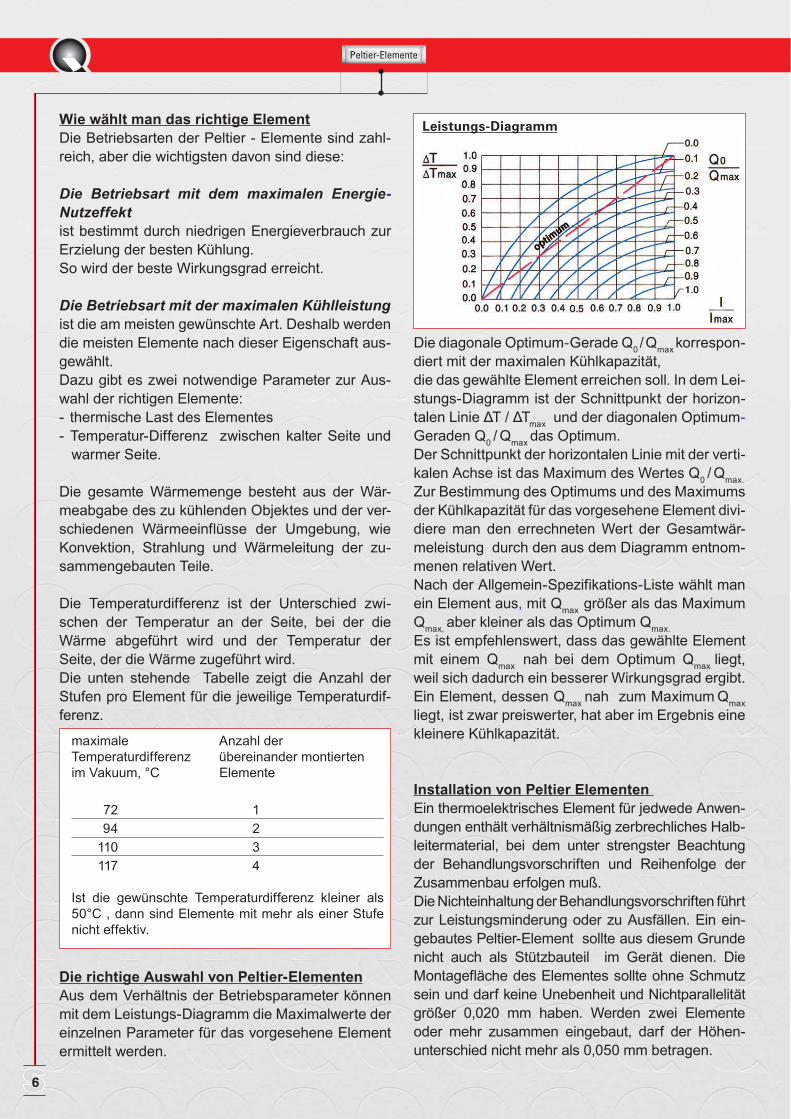
Peltier-Elemente
6
Die diagonale Optimum-Gerade Q0 / Qmax korrespon-diert mit der maximalen Kühlkapazität,die das gewählte Element erreichen soll. In dem Lei-stungs-Diagramm ist der Schnittpunkt der horizon-talen Linie T / Tmax und der diagonalen Optimum-Geraden Q0 / Qmax das Optimum.Der Schnittpunkt der horizontalen Linie mit der verti-kalen Achse ist das Maximum des Wertes Q0 / Qmax.Zur Bestimmung des Optimums und des Maximums der Kühlkapazität für das vorgesehene Element divi-diere man den errechneten Wert der Gesamtwär-meleistung durch den aus dem Diagramm entnom-menen relativen Wert. Nach der Allgemein-Spezifikations-Liste wählt man ein Element aus, mit Qmax größer als das Maximum Qmax, aber kleiner als das Optimum Qmax. Es ist empfehlenswert, dass das gewählte Element mit einem Qmax nah bei dem Optimum Qmax liegt, weil sich dadurch ein besserer Wirkungs grad ergibt. Ein Element, dessen Qmax nah zum Maximum Qmax liegt, ist zwar preiswerter, hat aber im Ergebnis eine kleinere Kühlkapazität.
Installation von Peltier Elementen Ein thermoelektrisches Element für jedwede Anwen-dungen enthält verhältnismäßig zerbrechliches Halb-leitermaterial, bei dem unter strengster Beachtung der Behandlungsvorschriften und Reihenfolge der Zusammenbau erfolgen muß.Die Nichteinhaltung der Behandlungsvorschriften führt zur Leistungsminderung oder zu Ausfällen. Ein ein-gebautes Peltier-Element sollte aus diesem Grunde nicht auch als Stützbauteil im Gerät dienen. Die Montagefläche des Elementes sollte ohne Schmutz sein und darf keine Unebenheit und Nichtparallelität größer 0,020 mm haben. Werden zwei Elemente oder mehr zusammen eingebaut, darf der Höhen-unterschied nicht mehr als 0,050 mm betragen.
maximale Anzahl der Temperaturdifferenz übereinander montierten im Vakuum, °C Elemente
72 1 94 2 110 3 117 4 Ist die gewünschte Temperaturdifferenz kleiner als 50°C , dann sind Elemente mit mehr als einer Stufe nicht effektiv.
Wie wählt man das richtige ElementDie Betriebsarten der Peltier - Elemente sind zahl-reich, aber die wichtigsten davon sind diese:
Die Betriebsart mit dem maximalen Energie-Nutzeffektist bestimmt durch niedrigen Energieverbrauch zur Erzielung der besten Kühlung.So wird der beste Wirkungsgrad erreicht.
Die Betriebsart mit der maximalen Kühlleistungist die am meisten gewünschte Art. Deshalb werden die meisten Elemente nach dieser Eigenschaft aus-gewählt.Dazu gibt es zwei notwendige Parameter zur Aus-wahl der richtigen Elemente:- thermische Last des Elementes- Temperatur-Differenz zwischen kalter Seite und warmer Seite.
Die gesamte Wärmemenge besteht aus der Wär-meabgabe des zu kühlenden Objektes und der ver-schiedenen Wärmeeinflüsse der Umgebung, wie Konvektion, Strahlung und Wärmeleitung der zu-sammengebauten Teile.
Die Temperaturdifferenz ist der Unterschied zwi-schen der Temperatur an der Seite, bei der die Wärme abgeführt wird und der Temperatur der Seite, der die Wärme zugeführt wird. Die unten stehende Tabelle zeigt die Anzahl der Stufen pro Element für die jeweilige Temperaturdif-ferenz.
Die richtige Auswahl von Peltier-ElementenAus dem Verhältnis der Betriebsparameter können mit dem Leistungs-Diagramm die Maximalwerte der einzelnen Parameter für das vorgesehene Element ermittelt werden.
Leistungs-Diagramm
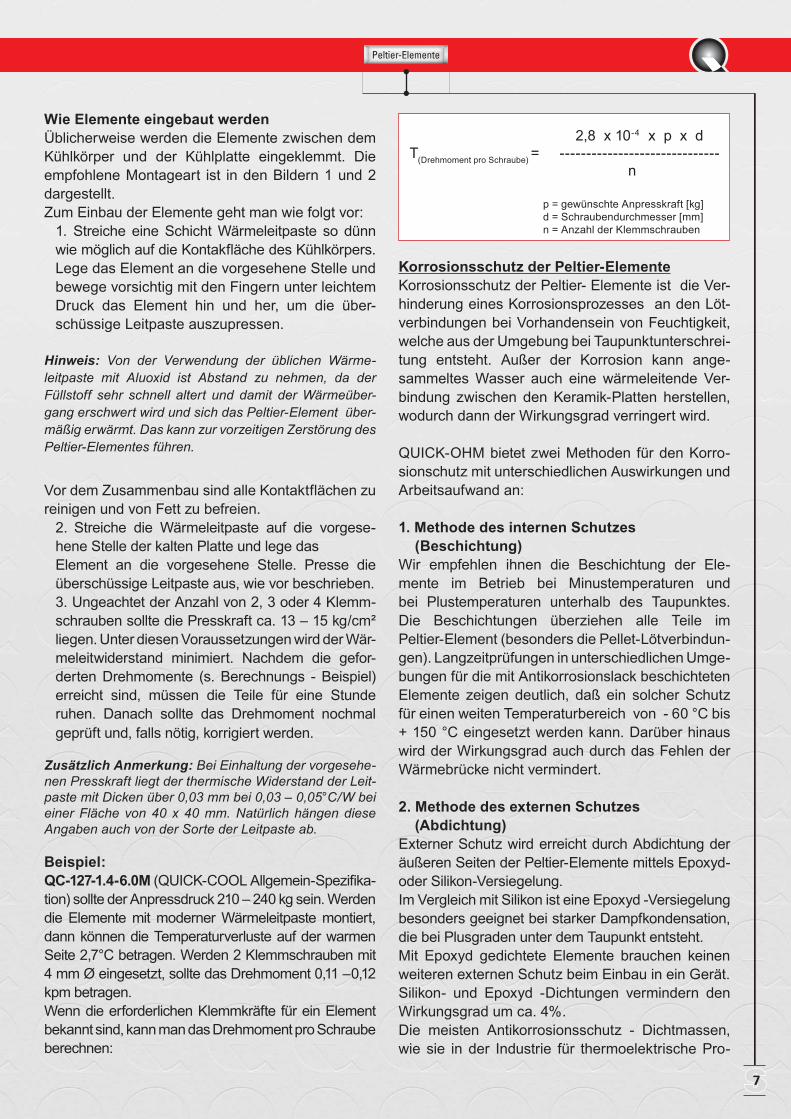
Peltier-Elemente
7
Wie Elemente eingebaut werdenÜblicherweise werden die Elemente zwischen dem Kühlkörper und der Kühlplatte eingeklemmt. Die empfohlene Montageart ist in den Bildern 1 und 2 dargestellt.Zum Einbau der Elemente geht man wie folgt vor:
1. Streiche eine Schicht Wärmeleitpaste so dünn wie möglich auf die Kontakfläche des Kühlkörpers. Lege das Element an die vorgesehene Stelle und bewege vorsichtig mit den Fingern unter leichtem Druck das Element hin und her, um die über-schüssige Leitpaste auszupressen.
Hinweis: Von der Verwendung der üblichen Wärme-leitpaste mit Aluoxid ist Abstand zu nehmen, da der Füllstoff sehr schnell altert und damit der Wärmeüber-gang erschwert wird und sich das Peltier-Element über-mäßig erwärmt. Das kann zur vorzeitigen Zerstörung des Peltier-Elementes führen.
Vor dem Zusammenbau sind alle Kontaktflächen zu reinigen und von Fett zu befreien.
2. Streiche die Wärmeleitpaste auf die vorgese-hene Stelle der kalten Platte und lege das Element an die vorgesehene Stelle. Presse die überschüssige Leitpaste aus, wie vor beschrieben.3. Ungeachtet der Anzahl von 2, 3 oder 4 Klemm-schrauben sollte die Presskraft ca. 13 – 15 kg/cm² liegen. Unter diesen Voraussetzungen wird der Wär-meleitwiderstand minimiert. Nachdem die gefor-derten Drehmomente (s. Berechnungs - Beispiel) erreicht sind, müssen die Teile für eine Stunde ruhen. Danach sollte das Drehmoment nochmal geprüft und, falls nötig, korrigiert werden.
Zusätzlich Anmerkung: Bei Einhaltung der vorgesehe-nen Presskraft liegt der thermische Widerstand der Leit-paste mit Dicken über 0,03 mm bei 0,03 – 0,05°C/W bei einer Fläche von 40 x 40 mm. Natürlich hängen diese Angaben auch von der Sorte der Leitpaste ab. Beispiel:QC-127-1.4-6.0M (QUICK-COOL Allgemein-Spezifika-tion) sollte der Anpressdruck 210 – 240 kg sein. Werden die Elemente mit moderner Wärmeleitpaste montiert, dann können die Temperaturverluste auf der warmen Seite 2,7°C betragen. Werden 2 Klemmschrauben mit 4 mm Ø eingesetzt, sollte das Drehmoment 0,11 –0,12 kpm betragen. Wenn die erforderlichen Klemmkräfte für ein Element bekannt sind, kann man das Drehmoment pro Schraube berechnen:
Korrosionsschutz der Peltier-ElementeKorrosionsschutz der Peltier- Elemente ist die Ver-hinderung eines Korrosionsprozesses an den Löt-verbindungen bei Vorhandensein von Feuchtigkeit, welche aus der Umgebung bei Taupunktunterschrei-tung entsteht. Außer der Korrosion kann ange-sammeltes Wasser auch eine wärmeleitende Ver-bindung zwischen den Keramik-Platten herstellen, wodurch dann der Wirkungsgrad verringert wird.
QUICK-OHM bietet zwei Methoden für den Korro-sionschutz mit unterschiedlichen Auswirkungen und Arbeitsaufwand an:
1. Methode des internen Schutzes (Beschichtung)Wir empfehlen ihnen die Beschichtung der Ele-mente im Betrieb bei Minustemperaturen und bei Plus temperaturen unterhalb des Taupunktes. Die Beschichtungen überziehen alle Teile im Peltier-Element (besonders die Pellet-Lötverbindun-gen). Langzeitprüfungen in unterschiedlichen Umge-bungen für die mit Antikorrosionslack beschichteten Elemente zeigen deutlich, daß ein solcher Schutz für einen weiten Temperaturbereich von - 60 °C bis + 150 °C eingesetzt werden kann. Darüber hinaus wird der Wirkungsgrad auch durch das Fehlen der Wärmebrücke nicht vermindert.
2. Methode des externen Schutzes (Abdichtung)Externer Schutz wird erreicht durch Abdichtung der äußeren Seiten der Peltier-Elemente mittels Epoxyd- oder Silikon-Versiegelung.Im Vergleich mit Silikon ist eine Epoxyd -Versiegelung besonders geeignet bei starker Dampfkondensation, die bei Plusgraden unter dem Taupunkt entsteht.Mit Epoxyd gedichtete Elemente brauchen keinen weiteren externen Schutz beim Einbau in ein Gerät.Silikon- und Epoxyd -Dichtungen vermindern den Wirkungsgrad um ca. 4%.Die meisten Antikorrosionsschutz - Dichtmassen, wie sie in der Industrie für thermoelektrische Pro-
p = gewünschte Anpresskraft [kg]d = Schraubendurchmesser [mm]n = Anzahl der Klemmschrauben
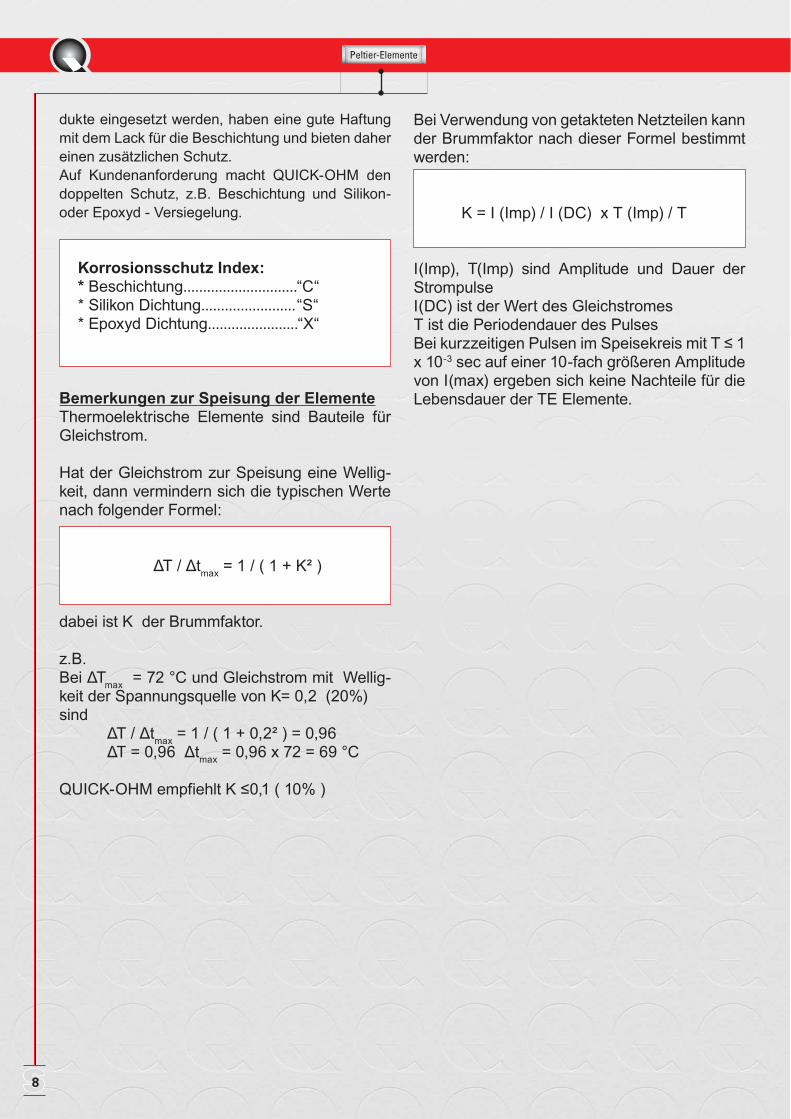
Peltier-Elemente
8
dukte eingesetzt werden, haben eine gute Haftung mit dem Lack für die Beschichtung und bieten daher einen zusätzlichen Schutz.Auf Kundenanforderung macht QUICK-OHM den doppelten Schutz, z.B. Beschichtung und Silikon- oder Epoxyd - Versiegelung.
Korrosionsschutz Index:* Beschichtung.............................“C“* Silikon Dichtung........................“S“* Epoxyd Dichtung.......................“X“
Bemerkungen zur Speisung der ElementeThermoelektrische Elemente sind Bauteile für Gleichstrom.
Hat der Gleichstrom zur Speisung eine Wellig-keit, dann vermindern sich die typischen Werte nach folgender Formel:
T / tmax = 1 / ( 1 + K² )
dabei ist K der Brummfaktor.
z.B. Bei Tmax = 72 °C und Gleichstrom mit Wellig-keit der Spannungsquelle von K= 0,2 (20%)sind T / tmax = 1 / ( 1 + 0,2² ) = 0,96 T = 0,96 tmax = 0,96 x 72 = 69 °C
QUICK-OHM empfiehlt K 0,1 ( 10% )
Bei Verwendung von getakteten Netzteilen kann der Brummfaktor nach dieser Formel bestimmt werden:
K = I (Imp) / I (DC) x T (Imp) / T
I(Imp), T(Imp) sind Amplitude und Dauer der StrompulseI(DC) ist der Wert des GleichstromesT ist die Periodendauer des PulsesBei kurzzeitigen Pulsen im Speisekreis mit T 1 x 10-3 sec auf einer 10-fach größeren Amplitude von I(max) ergeben sich keine Nachteile für die Lebensdauer der TE Elemente.
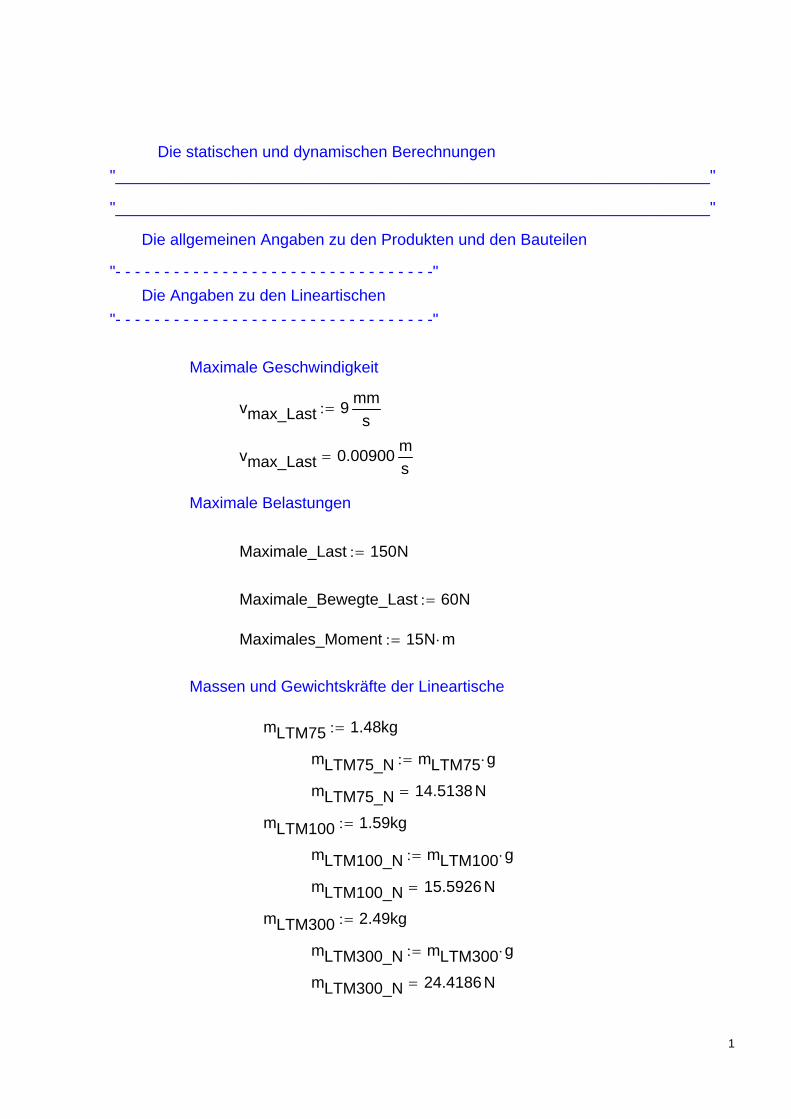
mLTM300_N 24.4186N=
mLTM300_N mLTM300 g⋅:=
mLTM300 2.49kg:=
mLTM100_N 15.5926N=
mLTM100_N mLTM100 g⋅:=
mLTM100 1.59kg:=
mLTM75_N 14.5138N=
mLTM75_N mLTM75 g⋅:=
mLTM75 1.48kg:=
Massen und Gewichtskräfte der Lineartische
Maximales_Moment 15N m⋅:=
Maximale_Bewegte_Last 60N:=
Maximale_Last 150N:=
Maximale Belastungen
vmax_Last 0.00900 ms
=
vmax_Last 9 mms
:=
Maximale Geschwindigkeit
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Die Angaben zu den Lineartischen
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Die allgemeinen Angaben zu den Produkten und den Bauteilen
"___________________________________________________________________"
"___________________________________________________________________"Die statischen und dynamischen Berechnungen
1
mVerbindung_LTM300_N 3.9227N=
mVerbindung_LTM300_N mVerbindung_LTM300 g⋅:=
mVerbindung_LTM300 0.4kg:=
Für den Lieneartisch LTM80-300
mPhotomultiplier_Halter_N 1.0787N=
mPhotomultiplier_Halter_N mPhotomultiplier_Halter g⋅:=
mPhotomultiplier_Halter 0.11kg:=
Der Photomultiplierhalter
Masse und Gewichtskräfte der Verbindungselemente
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Die Angaben zu den Verbindungselementen
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
mDetektoren_sum 3.2362N=
mDetektoren_sum mKamera_N mPhotomultiplier_N+:=
Summe der Gewichtskräfte der Detektoren
mPhotomultiplier_N 0.9807N=
mPhotomultiplier_N mPhotomultiplier g⋅:=
mPhotomultiplier 0.1kg:=
mKamera_N 2.2555N=
mKamera_N mKamera g⋅:=mKamera 0.23kg:=
Massen und Gewichtskräfte der Detektoren
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Die Angaben zu den Detektoren
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
2
mZw_Sum_LTM75 3.4323N=
mZw_Sum_LTM75 mVerbindung_LTM75_N mWinkel_LTM75_N+:=
Summer für die Verbindungselemente am LTM 80-75
mWinkel_LTM75_N 1.7652N=
mWinkel_LTM75_N mWinkel_LTM75 g⋅:=
mWinkel_LTM75 0.18kg:=
mVerbindung_LTM75_N 1.6671N=
mVerbindung_LTM75_N mVerbindung_LTM75 g⋅:=
mVerbindung_LTM75 0.17kg:=
Für den Lineartisch LTM80-75
mZw_Sum_LTM100 3.9227N=
mZw_Sum_LTM100 mVerbindung_LTM100_NmWinkel_LTM100_N+
...:=
Summe für die Verbindungselemente am LTM 80-100
mWinkel_LTM100_N 2.2555N=
mWinkel_LTM100_N mWinkel_LTM100 g⋅:=
mWinkel_LTM100 0.23kg:=
mVerbindung_LTM100_N 1.6671N=
mVerbindung_LTM100_N mVerbindung_LTM100 g⋅:=
mVerbindung_LTM100 0.17kg:=
Für den Lineartisch LTM80-100
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Die Angaben zu den Verbindungselementen
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
3
mSum_Heb_3 6.6685N=
mSum_Heb_3 mDetektoren_sum mZw_Sum_LTM75+:=
Am Hebelarm_3 greifen nur noch die Gewichtskräfte der Detektoren, deren Halterung und dem Verbindungselement LTM75 an.
mSum_Heb_2 25.1050N=
mSum_Heb_2 mDetektoren_sum mZw_Sum_LTM100+mZw_Sum_LTM75 mLTM75_N++
...:=
Am Hebelarm_2 greifen alle Gewichtskräfte an, ausser die des Lineartisches LTM 80-300 und des Lineartisches LTM 80-100 und demVerbindungselement LTM300.
mSum_Heb_1 44.6203N=
mSum_Heb_1 mDetektoren_sum mVerbindung_LTM300_N+mZw_Sum_LTM100 mZw_Sum_LTM75++
...
mLTM75_N mLTM100_N++...
:=
Am Hebelarm_1 greifen alle Gewichtskräfte an, ausser die des Lineartisches LTM 80-300
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Die summierung der Massen, die Summe der Gewichtskräfte wird passend zu den Indiezes der Hebelarme gebildet.
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Hebelarm_3 124mm:=
Hebelarm_2 215.75mm:=
Hebelarm_1 187.5mm:=
Hier werden die Längen der Hebelarme angegeben, die für die Biegebeansruchungen und die Momentenbelastungen ausschlaggebend sindDie genaue Lage der Hebelarme sind der Abb. 6-2 der Diplomarbeit zu entnehmen.
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Die Angaben zu den Hebelarmen
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
4
"___________________________________________________________________"
Der Beginn der Berechnung"___________________________________________________________________"
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Kapitel 6.3.1.1) Angaben zur theoretischen Beschleunigung"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Die angenommene theoretische Zeit des Beschleunigungsvorganges
t_beschleunigung 0.5s:=
Berechnete Beschleunigung
a_theovmax_Last
t_beschleunigung:=
a_theo 18.0000 mm
s2=
Zurückgelegter Weg bei berechneter Beschleunigung
s_besch a_theo t_beschleunigung2⋅( )2
:=
s_besch 2.2500mm=
5
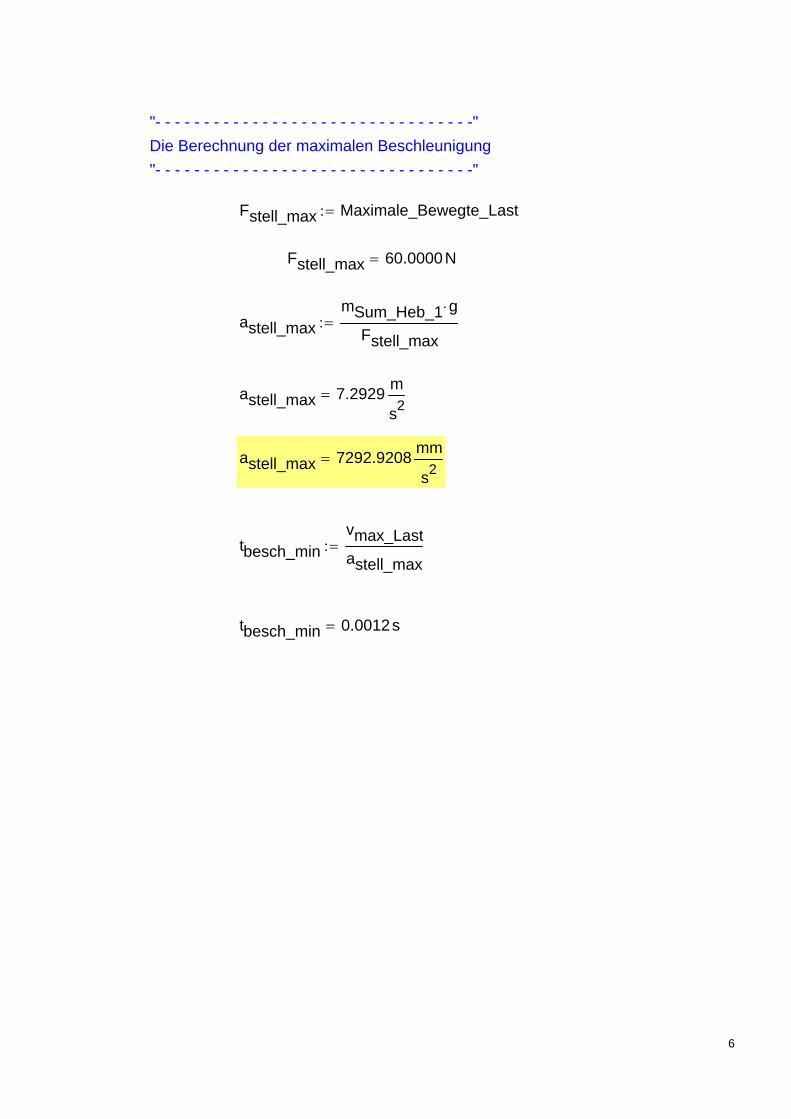
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Die Berechnung der maximalen Beschleunigung"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Fstell_max Maximale_Bewegte_Last:=
Fstell_max 60.0000N=
astell_maxmSum_Heb_1 g⋅
Fstell_max:=
astell_max 7.2929 m
s2=
astell_max 7292.9208 mm
s2=
tbesch_minvmax_Lastastell_max
:=
tbesch_min 0.0012s=
6

"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
S_M_x_LTM100 2.7694=
S_M_x_LTM100 Maximales_MomentM_xLTM100
:=
statische Sicherheit bei 15Nm
M_xLTM100 5.4164N m⋅=
M_xLTM100 Hebelarm_2 mSum_Heb_2⋅:=
LTM80 - 100"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
S_M_zLTM300 1.7929=
S_M_zLTM300Maximales_Moment
M_zLTM300:=
statische Sicherheit bei 15Nm
M_zLTM300 8.3663N m⋅=
M_zLTM300 Hebelarm_1 mSum_Heb_1⋅:=
LTM80 - 300
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Die Berechnung der statischen Momente
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Die Ergebnisse zeigen, dass keiner der Lienartische über die Grenzender Herstellerangaben belastet wird.
Slineartisch 3.3617=
Slineartisch150 N⋅
mSum_Heb_1:=
Überprüfung der Tragfähigkeit der Lineartische. Es wird nur der Lineartisch LTM 80-300 berechnet, da die anderen geringer belastet werden.
"___________________________________________________________________"
Kapitel 6.3.1.2) Die Berechnung der statischen Momente und Kräfte, die auf die Lineartische wirken, Berechnugsangaben im Koordinatensystem der Lineartische
"___________________________________________________________________"
7

An diesem Ergebniss ist zu sehen, dass die Stellkraft weit über das benötigteMaß hinaus ausreichend ist.
SStellkraft_empf 732.6007=
SStellkraft_empf60 N⋅
Fdyn_1_empf:=
Überprüfung der Stellkraft des LTM 80-300 bei empfohlener Beschleunigung
Fdyn_1_empf 0.0819N=
Fdyn_1_empf a_theomSum_Heb_1
g⋅:=
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Bei empfohlener Beschleunigung am LTM 80-300"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Die Berechnung der Beschleunigungskräfte
"___________________________________________________________________"Die Berechnung der dynamischen Belastungen"___________________________________________________________________"
S_M_y_LTM75 18.1401=
S_M_y_LTM75 Maximales_MomentM_yLTM75
:=
statische Sicherheit bei 15Nm
M_yLTM75 0.8269N m⋅=
M_yLTM75 Hebelarm_3 mSum_Heb_3⋅:=
LTM80 - 75
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Die Berechnung der statischen Momente
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
8
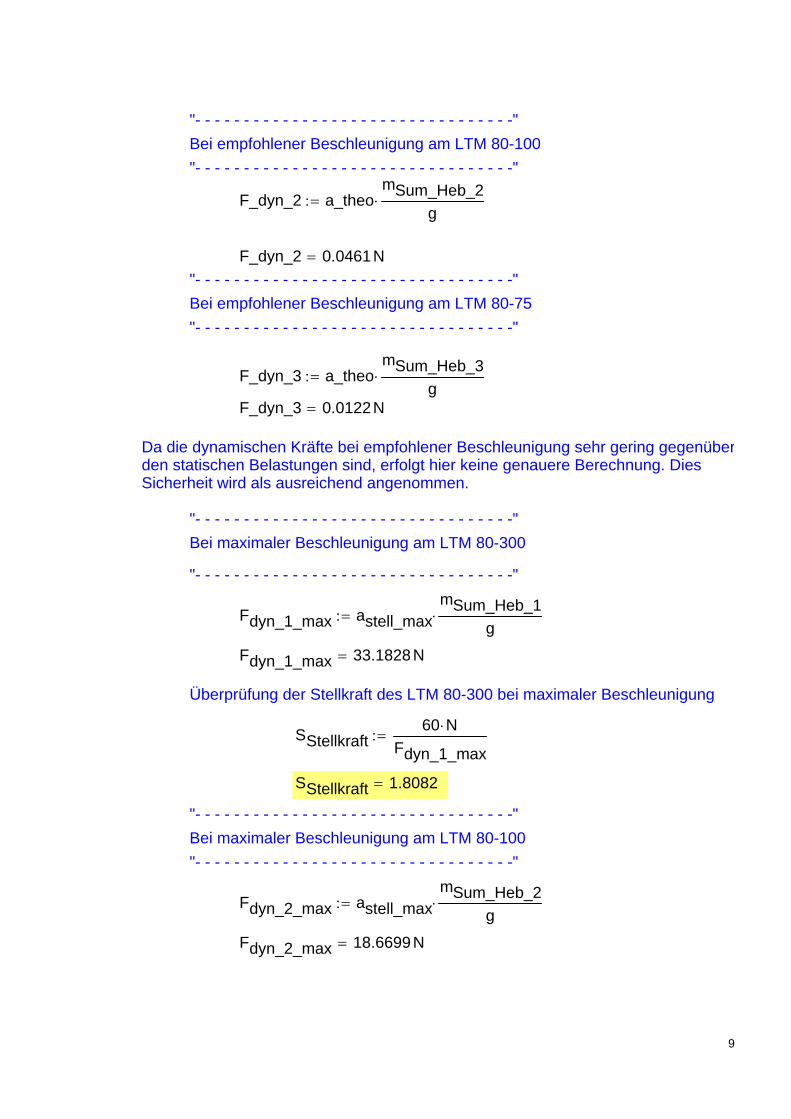
Fdyn_2_max 18.6699N=
Fdyn_2_max astell_maxmSum_Heb_2
g⋅:=
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Bei maximaler Beschleunigung am LTM 80-100"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
SStellkraft 1.8082=
SStellkraft60 N⋅
Fdyn_1_max:=
Überprüfung der Stellkraft des LTM 80-300 bei maximaler Beschleunigung
Fdyn_1_max 33.1828N=
Fdyn_1_max astell_maxmSum_Heb_1
g⋅:=
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Bei maximaler Beschleunigung am LTM 80-300"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Da die dynamischen Kräfte bei empfohlener Beschleunigung sehr gering gegenüberden statischen Belastungen sind, erfolgt hier keine genauere Berechnung. Dies Sicherheit wird als ausreichend angenommen.
F_dyn_3 0.0122N=
F_dyn_3 a_theomSum_Heb_3
g⋅:=
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Bei empfohlener Beschleunigung am LTM 80-75"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
F_dyn_2 0.0461N=
F_dyn_2 a_theomSum_Heb_2
g⋅:=
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Bei empfohlener Beschleunigung am LTM 80-100"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
9

"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Bei maximaler Beschleunigung am LTM 80-75"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Fdyn_3_max astell_maxmSum_Heb_3
g⋅:=
Fdyn_3_max 4.9592N=
Da die dynamischen Kräfte bei maximaler Beschleunigung um ein Vielfaches ansteigen, sollte die Beschleunigung auf das empfohlene Maß beschänkt werden.
10
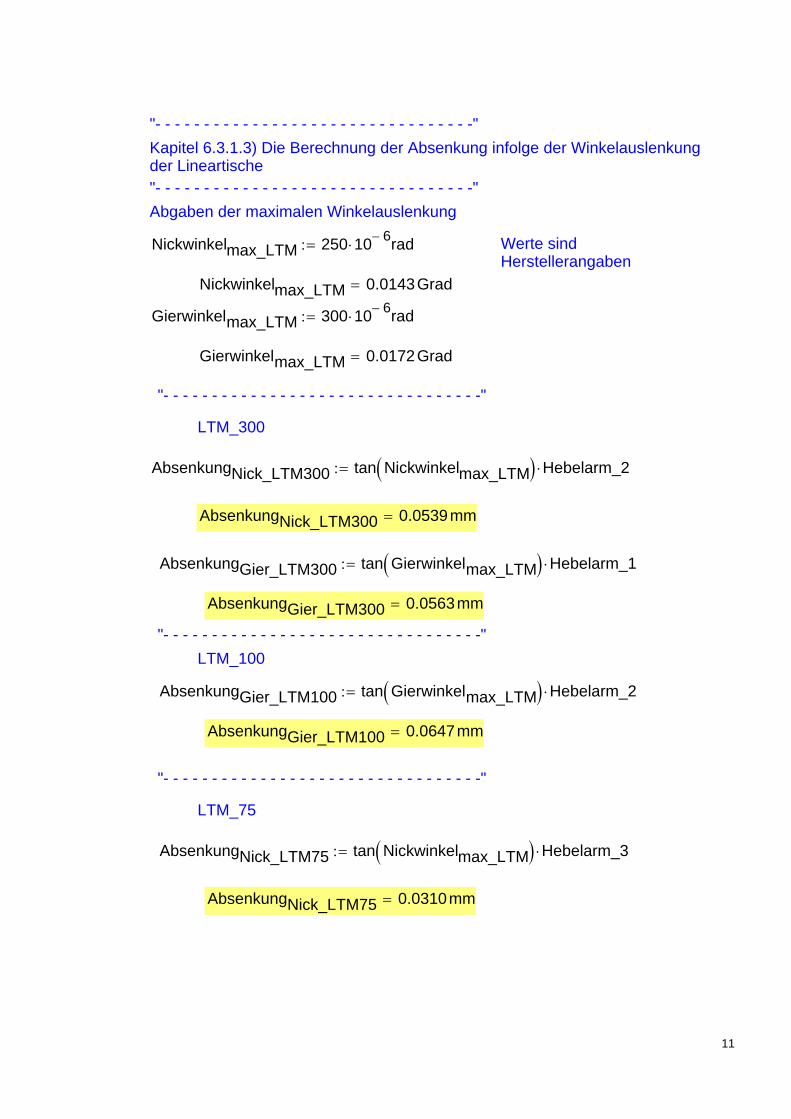
AbsenkungNick_LTM75 0.0310mm=
AbsenkungNick_LTM75 tan Nickwinkelmax_LTM( ) Hebelarm_3⋅:=
LTM_75
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
AbsenkungGier_LTM100 0.0647mm=
AbsenkungGier_LTM100 tan Gierwinkelmax_LTM( ) Hebelarm_2⋅:=
LTM_100 "- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
AbsenkungGier_LTM300 0.0563mm=
AbsenkungGier_LTM300 tan Gierwinkelmax_LTM( ) Hebelarm_1⋅:=
AbsenkungNick_LTM300 0.0539mm=
AbsenkungNick_LTM300 tan Nickwinkelmax_LTM( ) Hebelarm_2⋅:=
LTM_300
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Gierwinkelmax_LTM 0.0172Grad=
Gierwinkelmax_LTM 300 10 6− rad⋅:=
Nickwinkelmax_LTM 0.0143Grad=
Werte sind Herstellerangaben
Nickwinkelmax_LTM 250 10 6−⋅ rad:=
Abgaben der maximalen Winkelauslenkung"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Kapitel 6.3.1.3) Die Berechnung der Absenkung infolge der Winkelauslenkung der Lineartische
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
11

ymVerbindung_LTM300 0.2401mm=
ymVerbindung_LTM300 mSum_Heb_1Hebelarm_13
3 E_Alu⋅ IVerbindung_LTM300⋅⋅:=
IVerbindung_LTM300 5833.3333 mm4=
IVerbindung_LTM300 70mm 10mm( )3
12⋅:=
Feste Einspannung und beansprucht auf Biegung
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Berechnung der statischen Durchbiegung des Verbindungselementes für die Lineartische LTM 80-100 und LTM 80-75
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Rp0.2 80 N
mm2:=
E_Alu 70000 N
mm2:=
Der E-Modul von Aluminium (Al Mg 3)
"___________________________________________________________________"Kapitel 6.3.2.1) Die Berechnung der statischen Durchbiegung der Verbindungselemente
"___________________________________________________________________"
AbsenkungWinkel_Summe 0.2059mm=
AbsenkungWinkel_Summe AbsenkungNick_LTM75AbsenkungGier_LTM100+
...
AbsenkungGier_LTM300+...
AbsenkungNick_LTM300+...
:=
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Summe der Absenkung auf Grund des Winkelversatzes"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
12
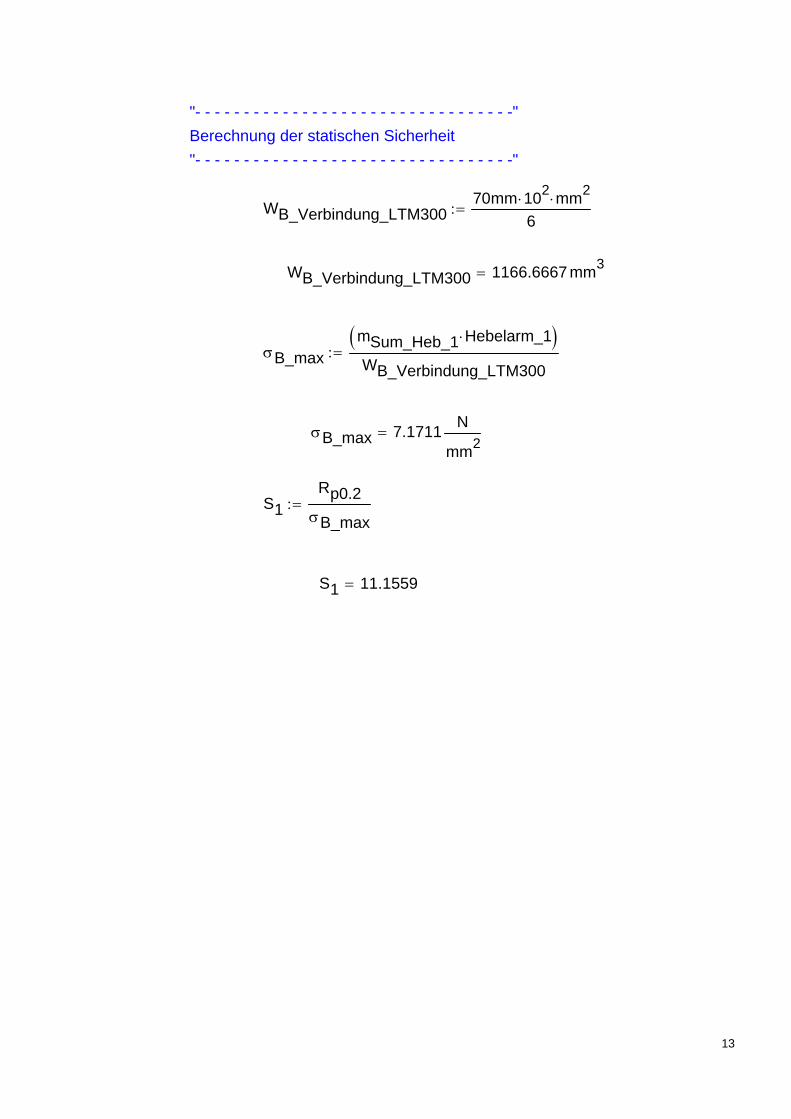
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Berechnung der statischen Sicherheit"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
WB_Verbindung_LTM30070mm 102⋅ mm2⋅
6:=
WB_Verbindung_LTM300 1166.6667 mm3=
σB_maxmSum_Heb_1 Hebelarm_1⋅( )WB_Verbindung_LTM300
:=
σB_max 7.1711 N
mm2=
S1Rp0.2
σB_max:=
S1 11.1559=
13
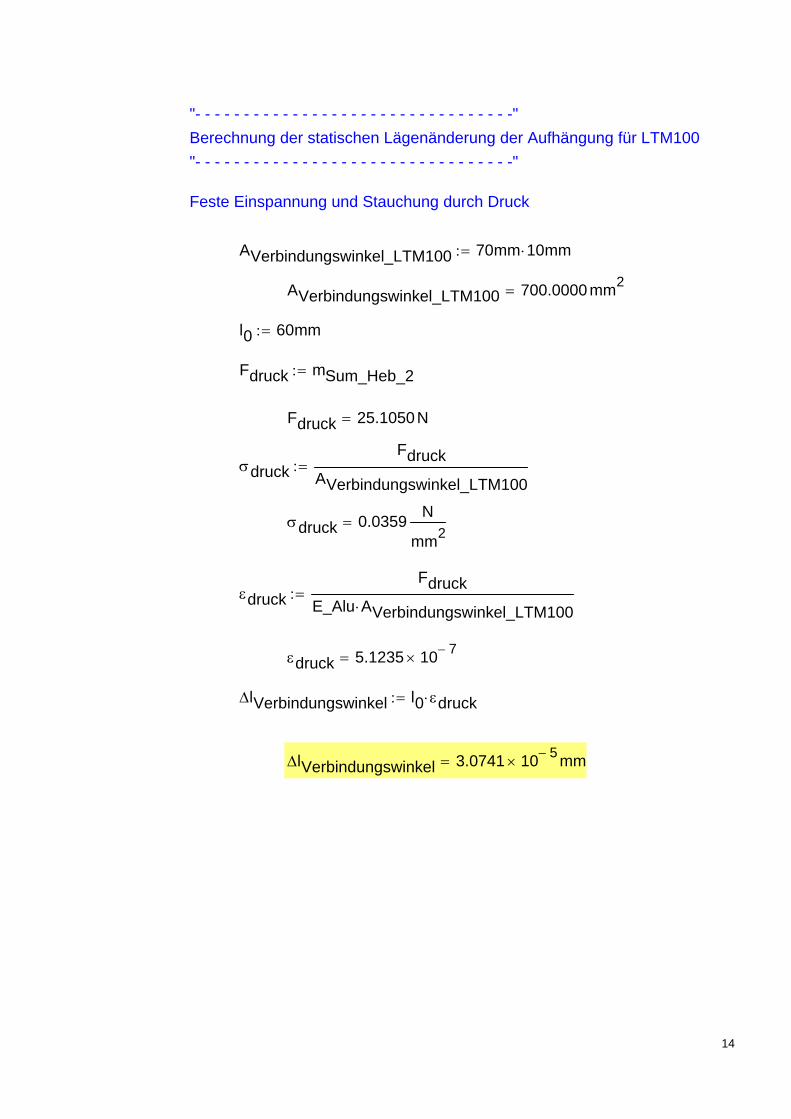
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Berechnung der statischen Lägenänderung der Aufhängung für LTM100"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Feste Einspannung und Stauchung durch Druck
AVerbindungswinkel_LTM100 70mm 10⋅ mm:=
AVerbindungswinkel_LTM100 700.0000 mm2=
l0 60mm:=
Fdruck mSum_Heb_2:=
Fdruck 25.1050N=
σdruckFdruck
AVerbindungswinkel_LTM100:=
σdruck 0.0359 N
mm2=
εdruckFdruck
E_Alu AVerbindungswinkel_LTM100⋅:=
εdruck 5.1235 10 7−×=
∆lVerbindungswinkel l0 εdruck⋅:=
∆lVerbindungswinkel 3.0741 10 5−× mm=
14
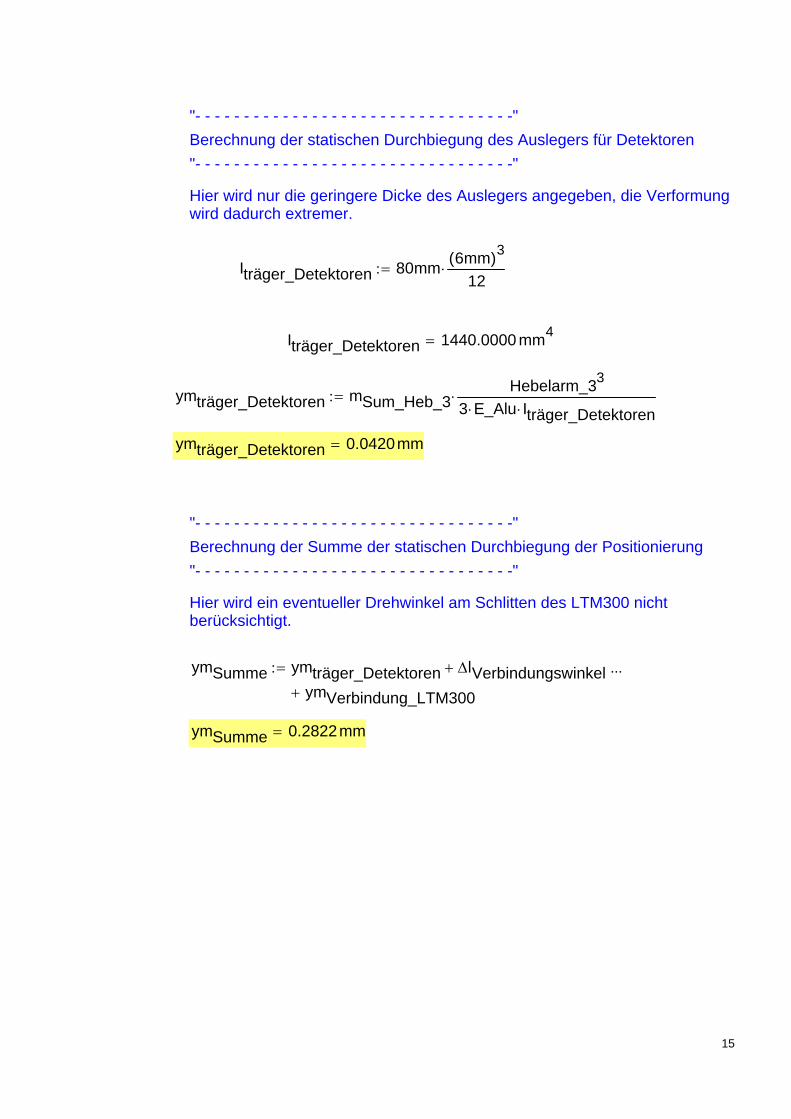
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Berechnung der statischen Durchbiegung des Auslegers für Detektoren"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Hier wird nur die geringere Dicke des Auslegers angegeben, die Verformung wird dadurch extremer.
Iträger_Detektoren 80mm 6mm( )3
12⋅:=
Iträger_Detektoren 1440.0000 mm4=
ymträger_Detektoren mSum_Heb_3Hebelarm_33
3 E_Alu⋅ Iträger_Detektoren⋅⋅:=
ymträger_Detektoren 0.0420mm=
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Berechnung der Summe der statischen Durchbiegung der Positionierung"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Hier wird ein eventueller Drehwinkel am Schlitten des LTM300 nicht berücksichtigt.
ymSumme ymträger_Detektoren ∆lVerbindungswinkel+
ymVerbindung_LTM300+
...:=
ymSumme 0.2822mm=
15
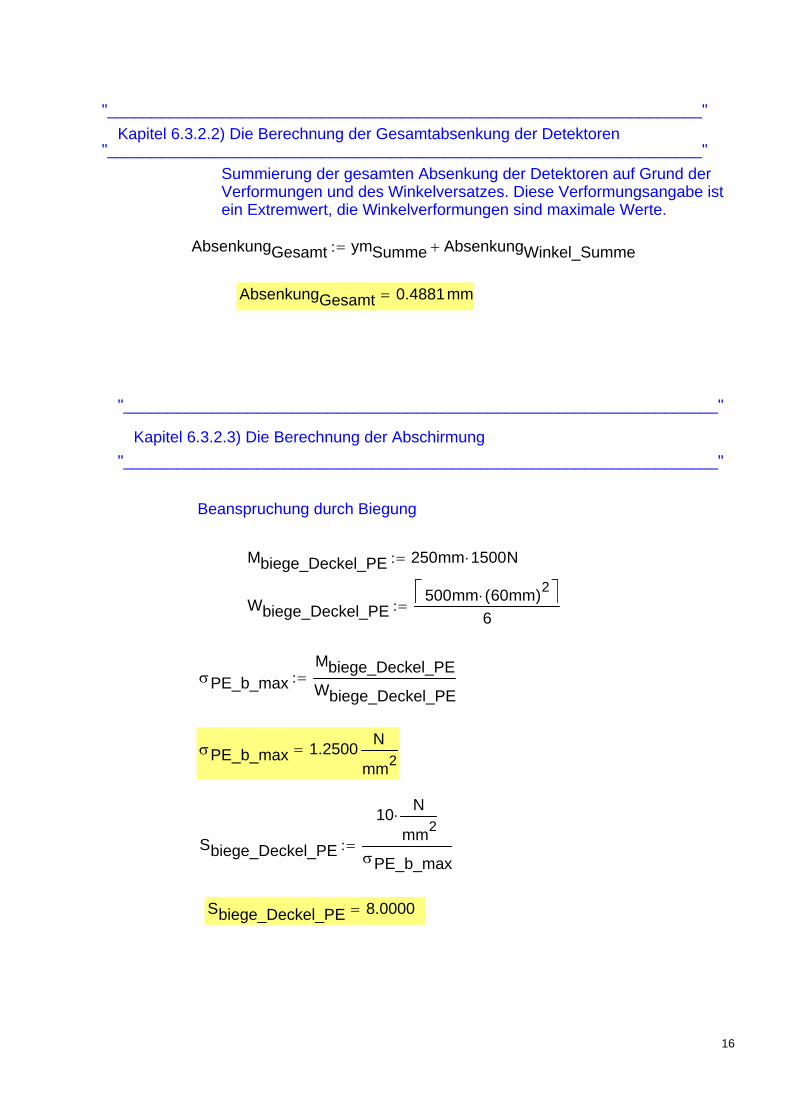
"___________________________________________________________________"Kapitel 6.3.2.2) Die Berechnung der Gesamtabsenkung der Detektoren
"___________________________________________________________________"Summierung der gesamten Absenkung der Detektoren auf Grund der Verformungen und des Winkelversatzes. Diese Verformungsangabe ist ein Extremwert, die Winkelverformungen sind maximale Werte.
AbsenkungGesamt ymSumme AbsenkungWinkel_Summe+:=
AbsenkungGesamt 0.4881mm=
"___________________________________________________________________"
Kapitel 6.3.2.3) Die Berechnung der Abschirmung"___________________________________________________________________"
Beanspruchung durch Biegung
Mbiege_Deckel_PE 250mm 1500⋅ N:=
Wbiege_Deckel_PE500mm 60mm( )2⋅⎡⎣ ⎤⎦
6:=
σPE_b_maxMbiege_Deckel_PEWbiege_Deckel_PE
:=
σPE_b_max 1.2500 N
mm2=
Sbiege_Deckel_PE
10 N
mm2⋅
σPE_b_max:=
Sbiege_Deckel_PE 8.0000=
16
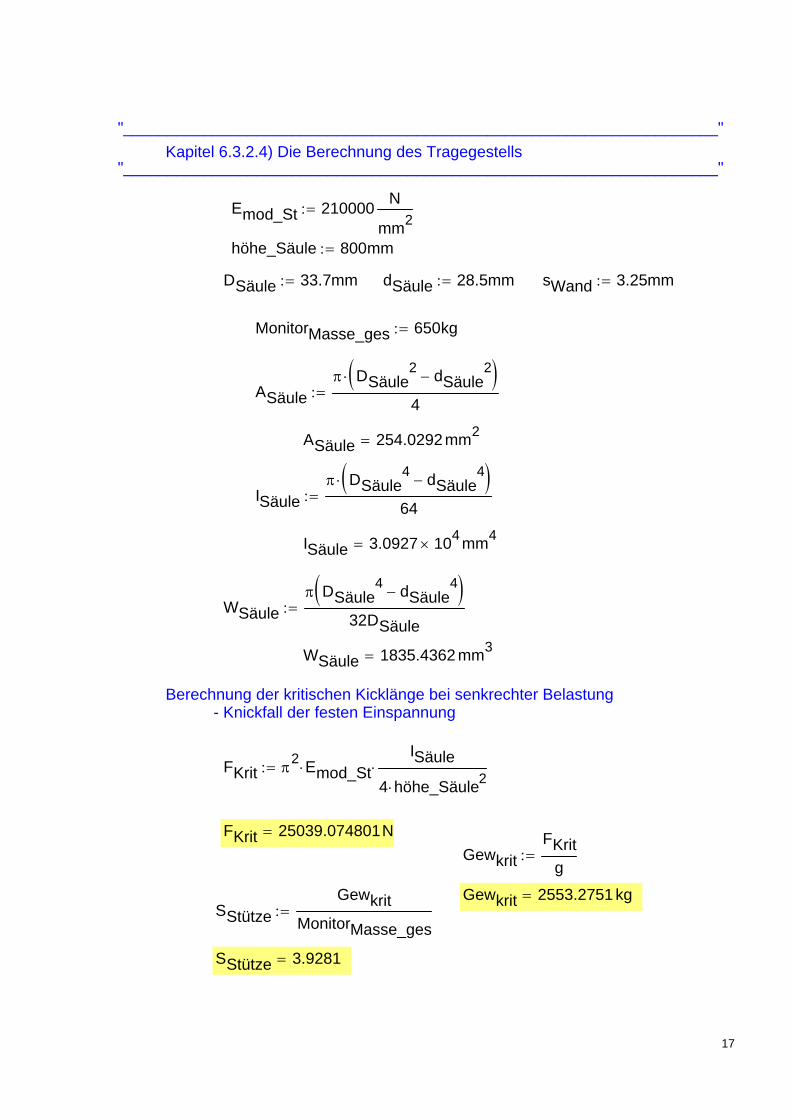
SStütze 3.9281=
SStützeGewkrit
MonitorMasse_ges:=
Gewkrit 2553.2751 kg=
GewkritFKrit
g:=
FKrit 25039.074801N=
FKrit π2 Emod_St⋅ISäule
4 höhe_Säule2⋅⋅:=
Berechnung der kritischen Kicklänge bei senkrechter Belastung- Knickfall der festen Einspannung
WSäule 1835.4362 mm3=
WSäuleπ DSäule
4 dSäule4−( )
32DSäule:=
ISäule 3.0927 104× mm4=
ISäuleπ DSäule
4 dSäule4−( )⋅
64:=
ASäule 254.0292 mm2=
ASäuleπ DSäule
2 dSäule2−( )⋅
4:=
MonitorMasse_ges 650kg:=
sWand 3.25mm:=dSäule 28.5mm:=DSäule 33.7mm:=
höhe_Säule 800mm:=
Emod_St 210000 N
mm2:=
"___________________________________________________________________"Kapitel 6.3.2.4) Die Berechnung des Tragegestells
"___________________________________________________________________"
17
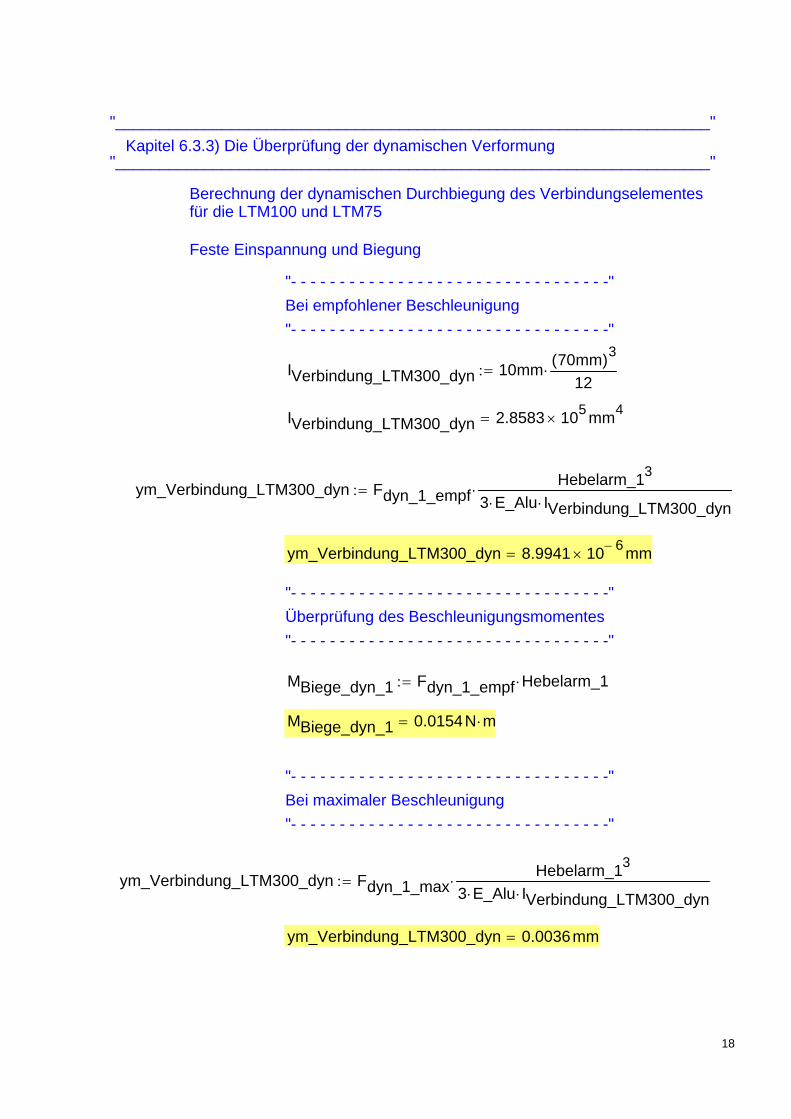
ym_Verbindung_LTM300_dyn 0.0036mm=
ym_Verbindung_LTM300_dyn Fdyn_1_maxHebelarm_13
3 E_Alu⋅ IVerbindung_LTM300_dyn⋅⋅:=
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Bei maximaler Beschleunigung"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
MBiege_dyn_1 0.0154N m⋅=
MBiege_dyn_1 Fdyn_1_empf Hebelarm_1⋅:=
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Überprüfung des Beschleunigungsmomentes"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
ym_Verbindung_LTM300_dyn 8.9941 10 6−× mm=
ym_Verbindung_LTM300_dyn Fdyn_1_empfHebelarm_13
3 E_Alu⋅ IVerbindung_LTM300_dyn⋅⋅:=
IVerbindung_LTM300_dyn 2.8583 105× mm4=
IVerbindung_LTM300_dyn 10mm 70mm( )3
12⋅:=
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Bei empfohlener Beschleunigung"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
Feste Einspannung und Biegung
Berechnung der dynamischen Durchbiegung des Verbindungselementesfür die LTM100 und LTM75
"___________________________________________________________________"Kapitel 6.3.3) Die Überprüfung der dynamischen Verformung
"___________________________________________________________________"
18
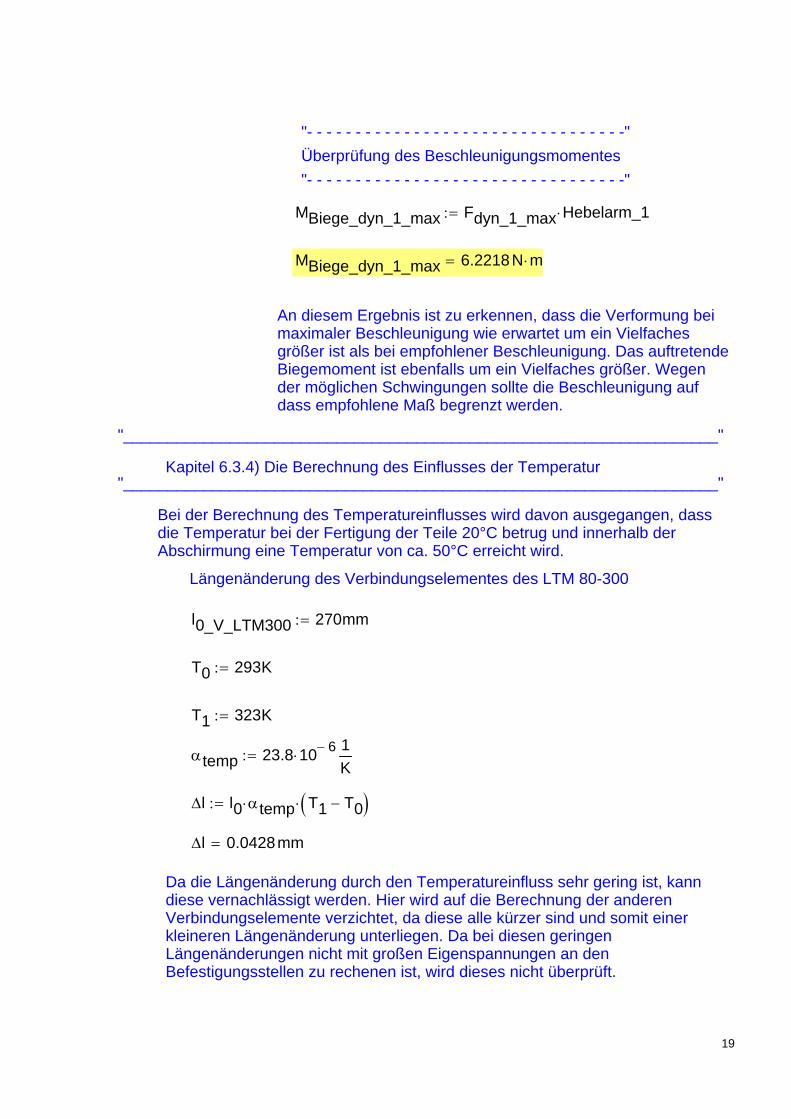
Da die Längenänderung durch den Temperatureinfluss sehr gering ist, kann diese vernachlässigt werden. Hier wird auf die Berechnung der anderen Verbindungselemente verzichtet, da diese alle kürzer sind und somit einer kleineren Längenänderung unterliegen. Da bei diesen geringen Längenänderungen nicht mit großen Eigenspannungen an den Befestigungsstellen zu rechenen ist, wird dieses nicht überprüft.
∆l 0.0428mm=
∆l l0 αtemp⋅ T1 T0−( )⋅:=
αtemp 23.8 10 6−⋅1K
:=
T1 323K:=
T0 293K:=
l0_V_LTM300 270mm:=
Längenänderung des Verbindungselementes des LTM 80-300
Bei der Berechnung des Temperatureinflusses wird davon ausgegangen, dass die Temperatur bei der Fertigung der Teile 20°C betrug und innerhalb der Abschirmung eine Temperatur von ca. 50°C erreicht wird.
"___________________________________________________________________"Kapitel 6.3.4) Die Berechnung des Einflusses der Temperatur
"___________________________________________________________________"
An diesem Ergebnis ist zu erkennen, dass die Verformung bei maximaler Beschleunigung wie erwartet um ein Vielfaches größer ist als bei empfohlener Beschleunigung. Das auftretende Biegemoment ist ebenfalls um ein Vielfaches größer. Wegen der möglichen Schwingungen sollte die Beschleunigung auf dass empfohlene Maß begrenzt werden.
MBiege_dyn_1_max 6.2218N m⋅=
MBiege_dyn_1_max Fdyn_1_max Hebelarm_1⋅:=
"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"Überprüfung des Beschleunigungsmomentes"- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -"
19
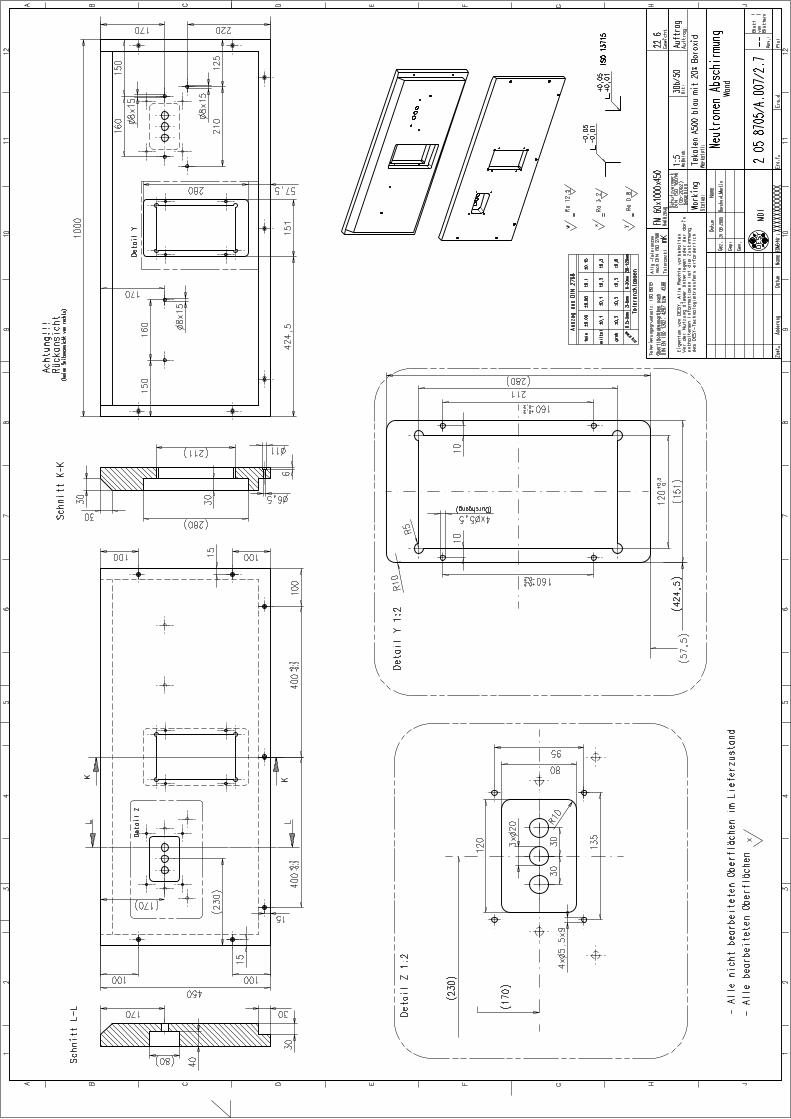
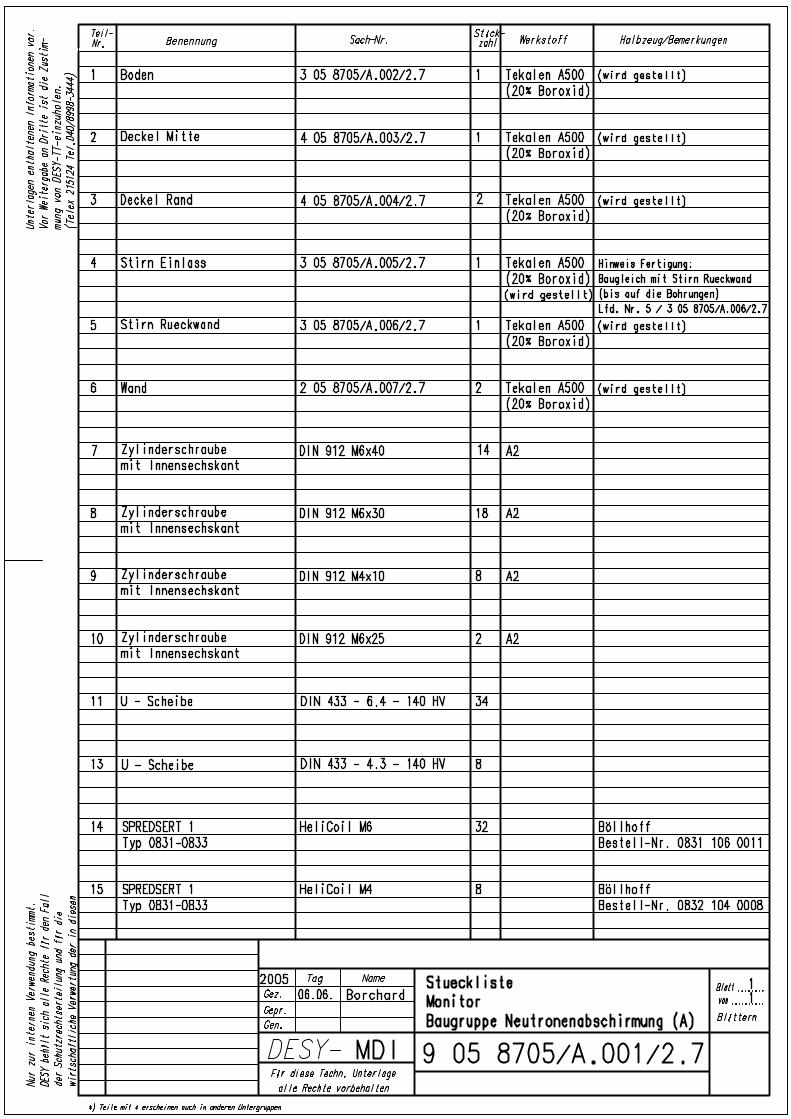
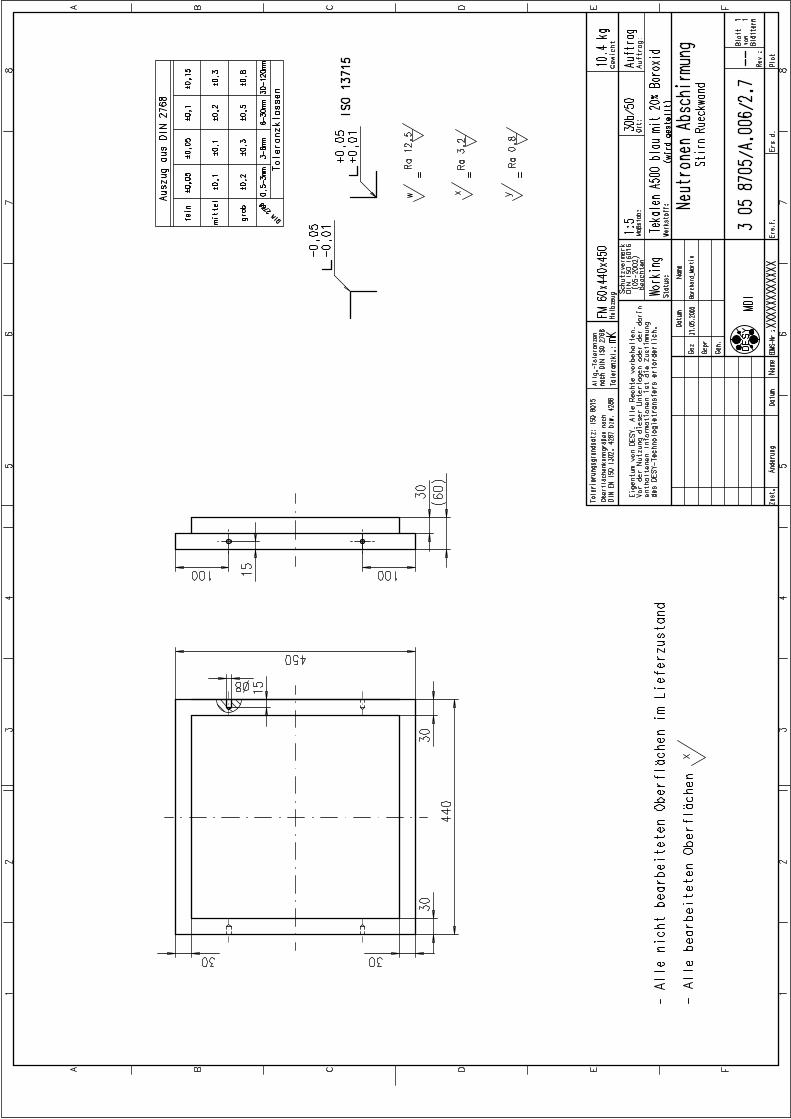
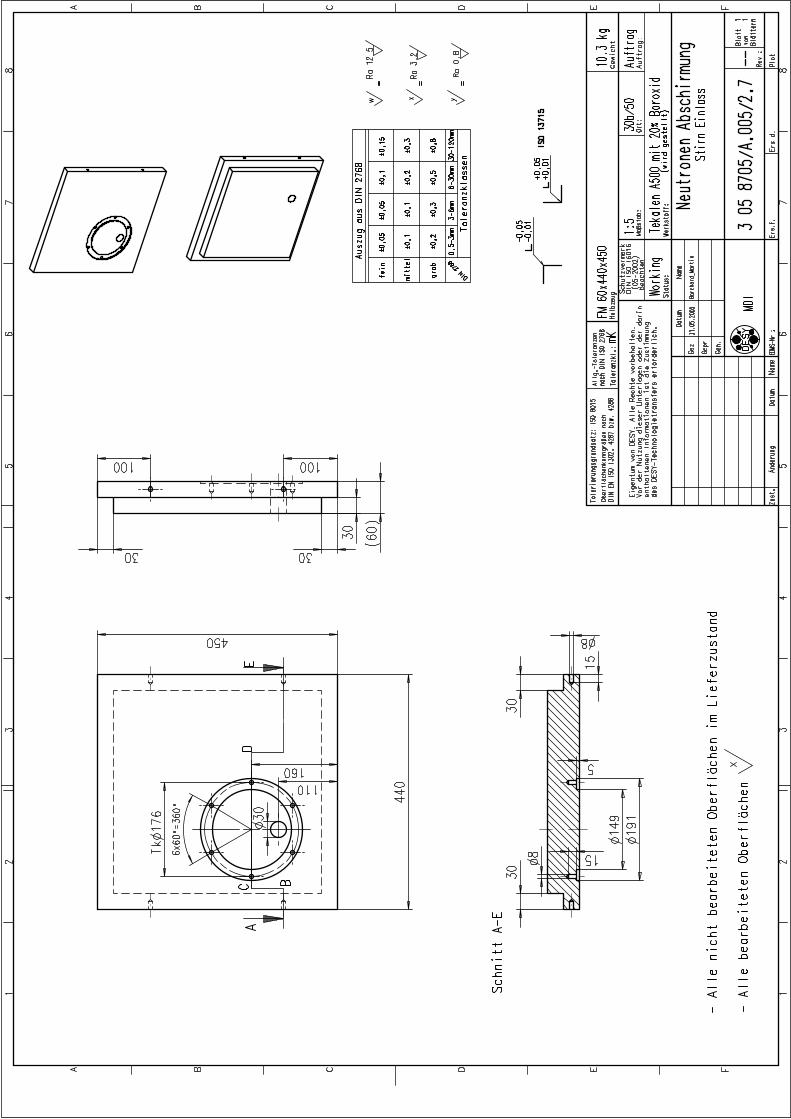
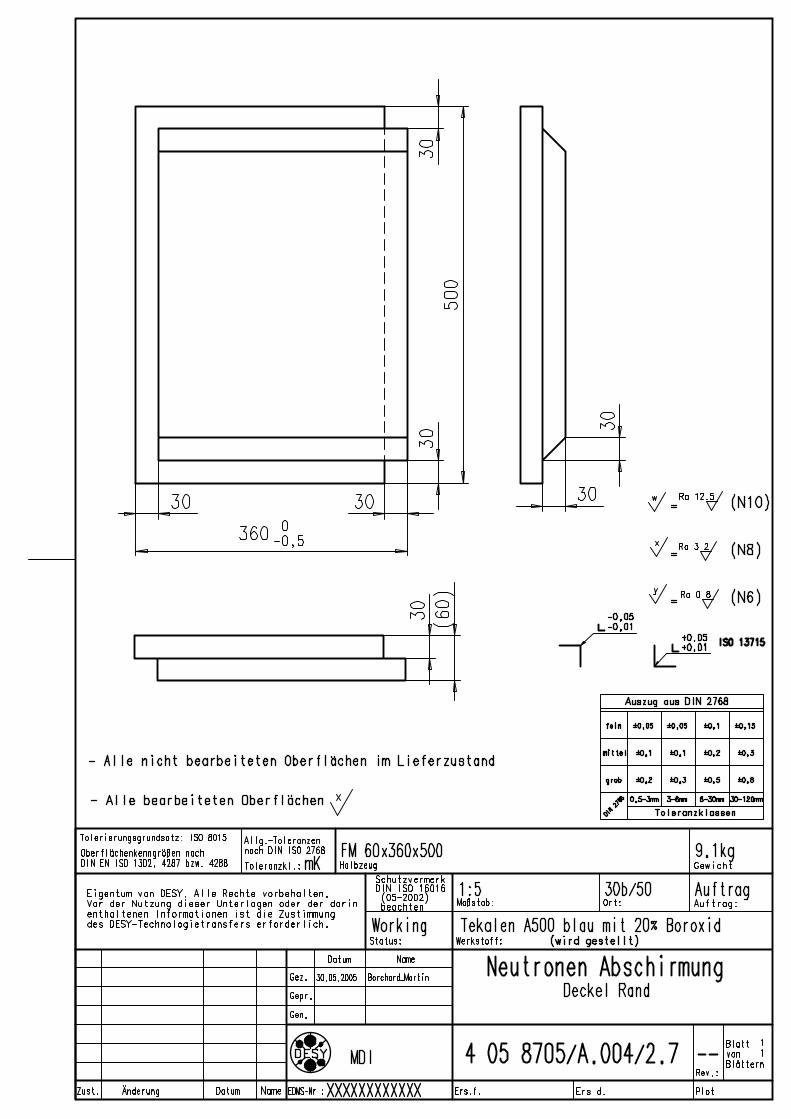
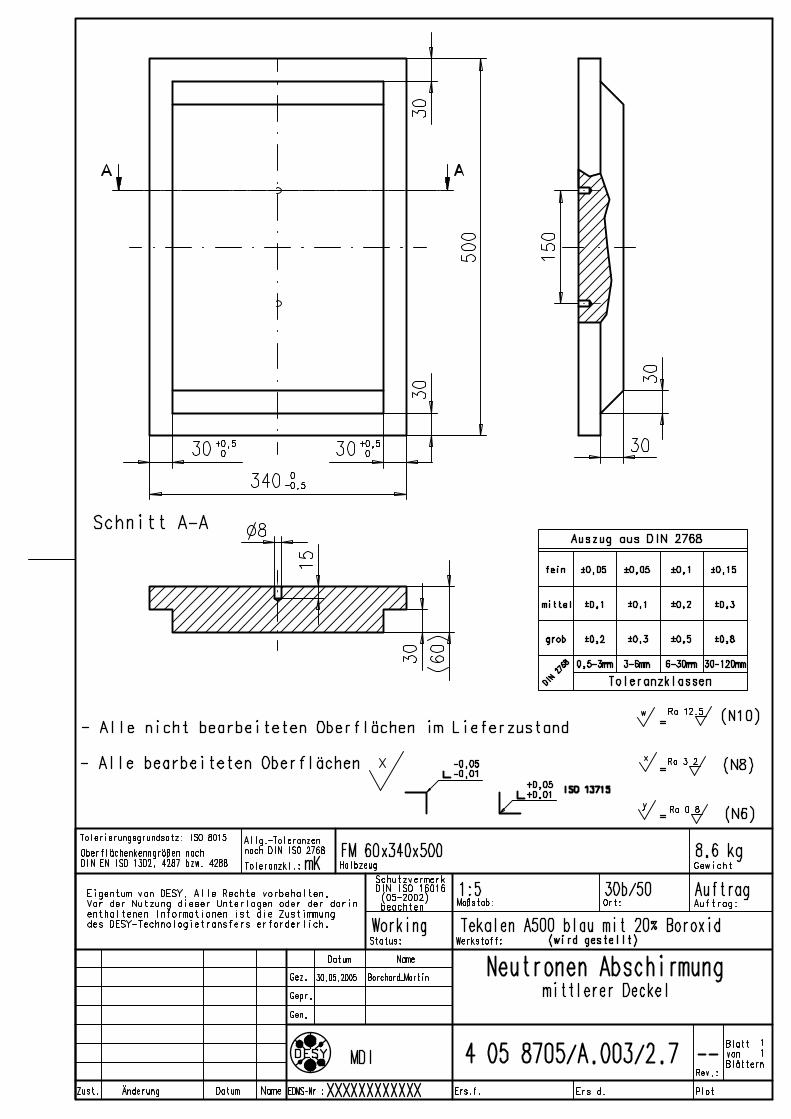

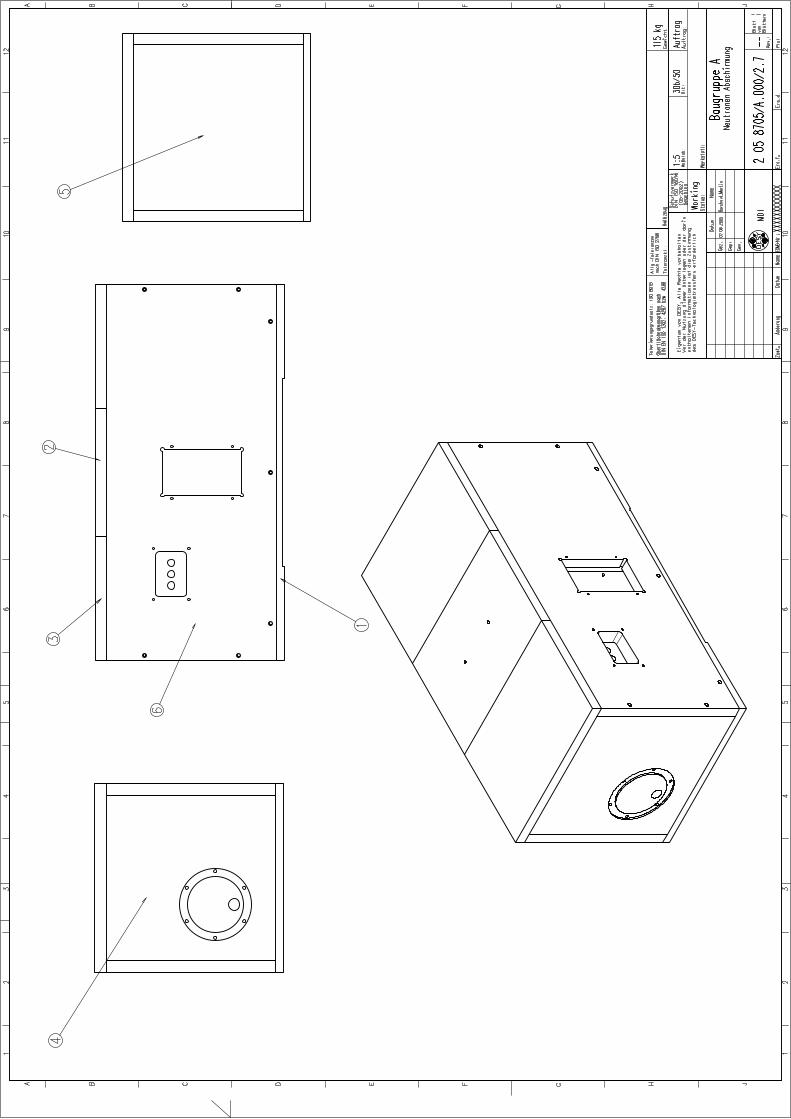
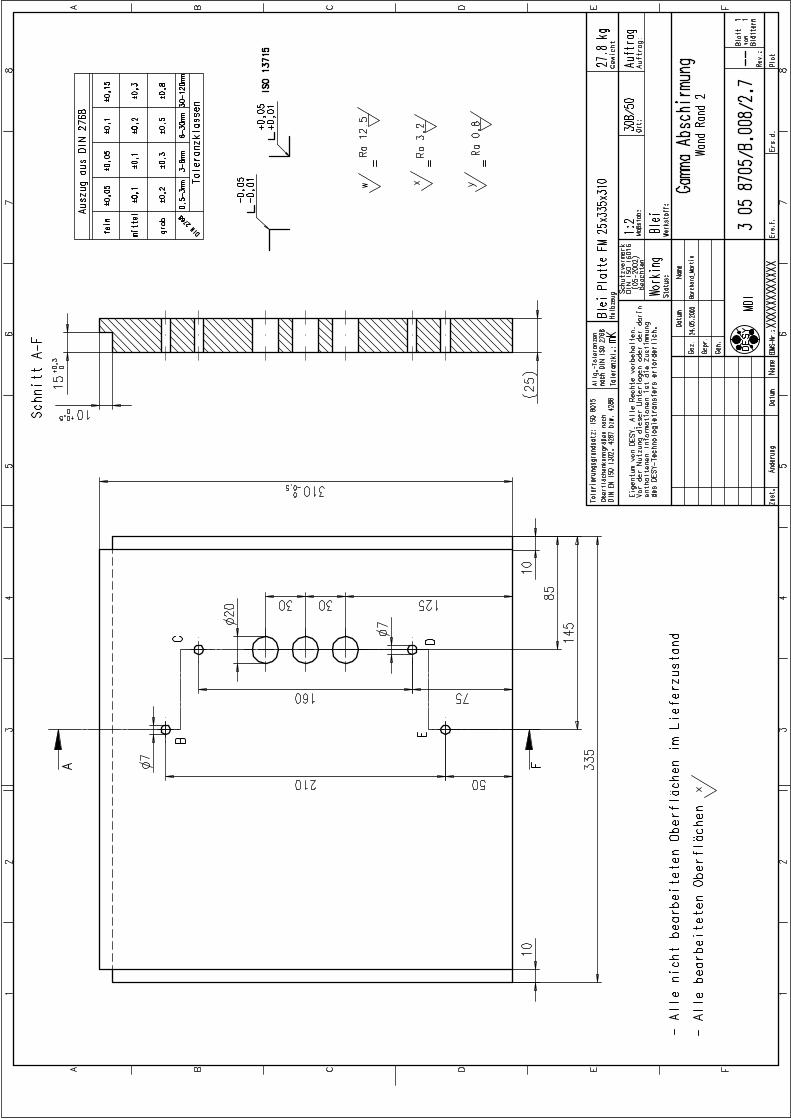
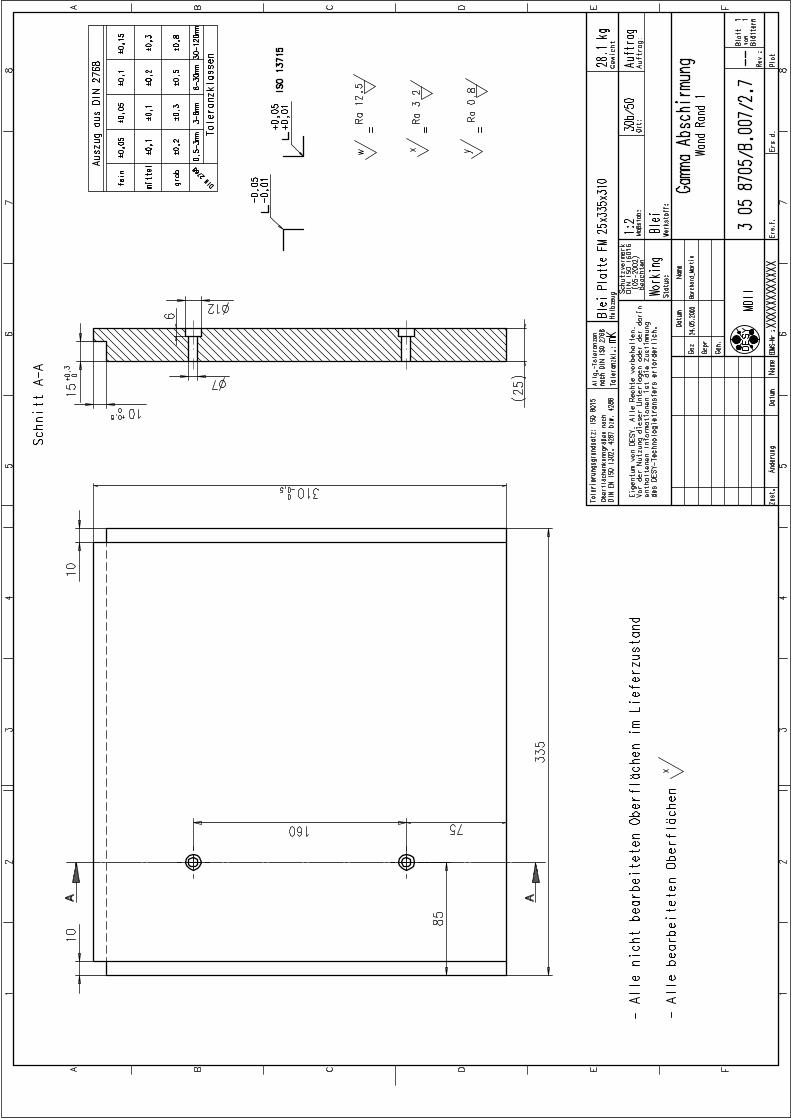
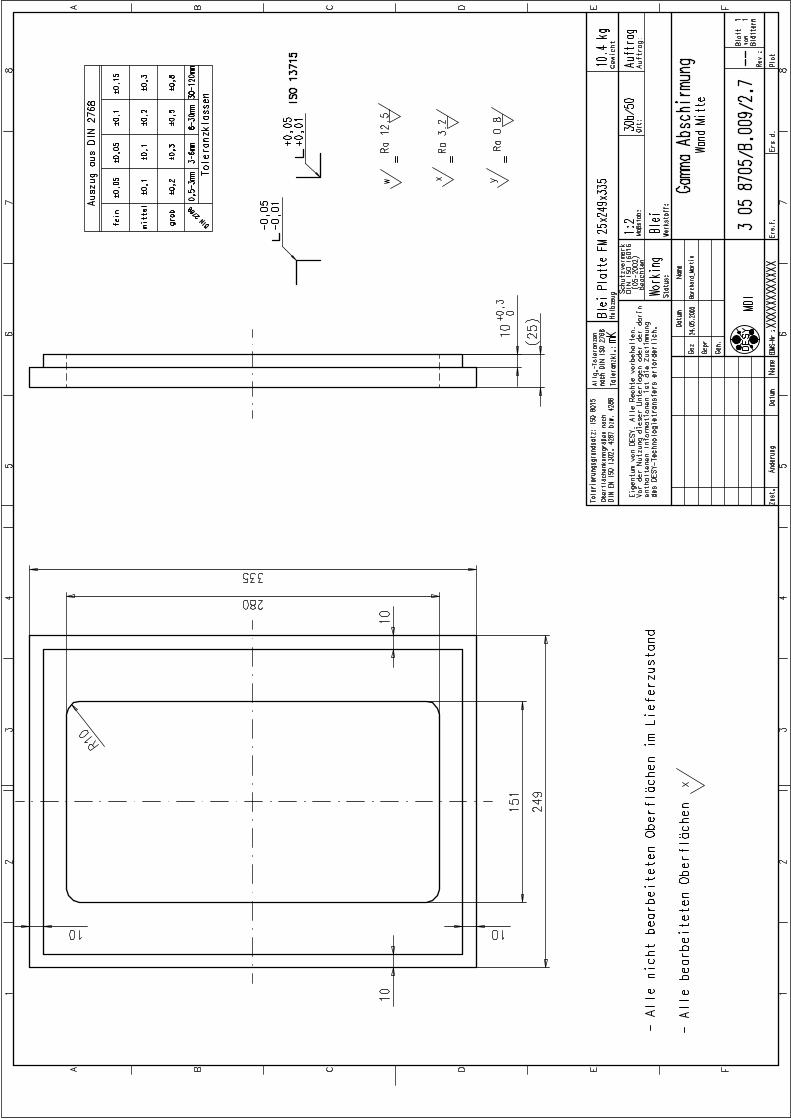
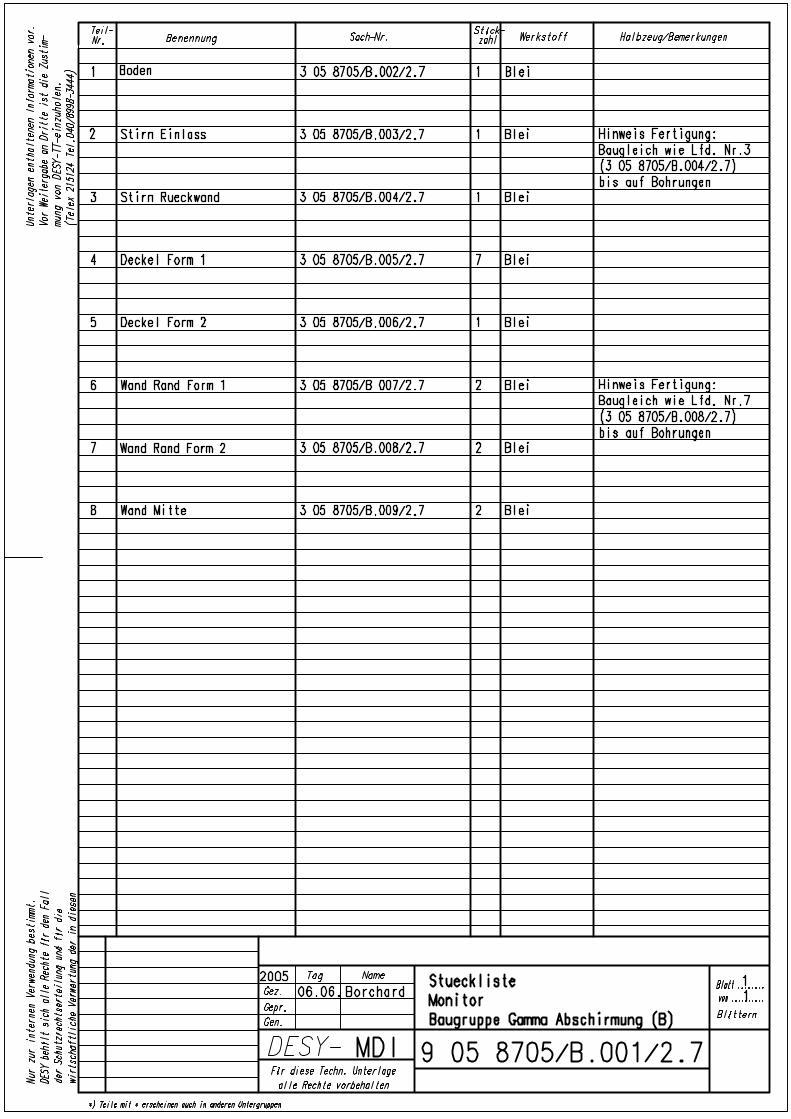
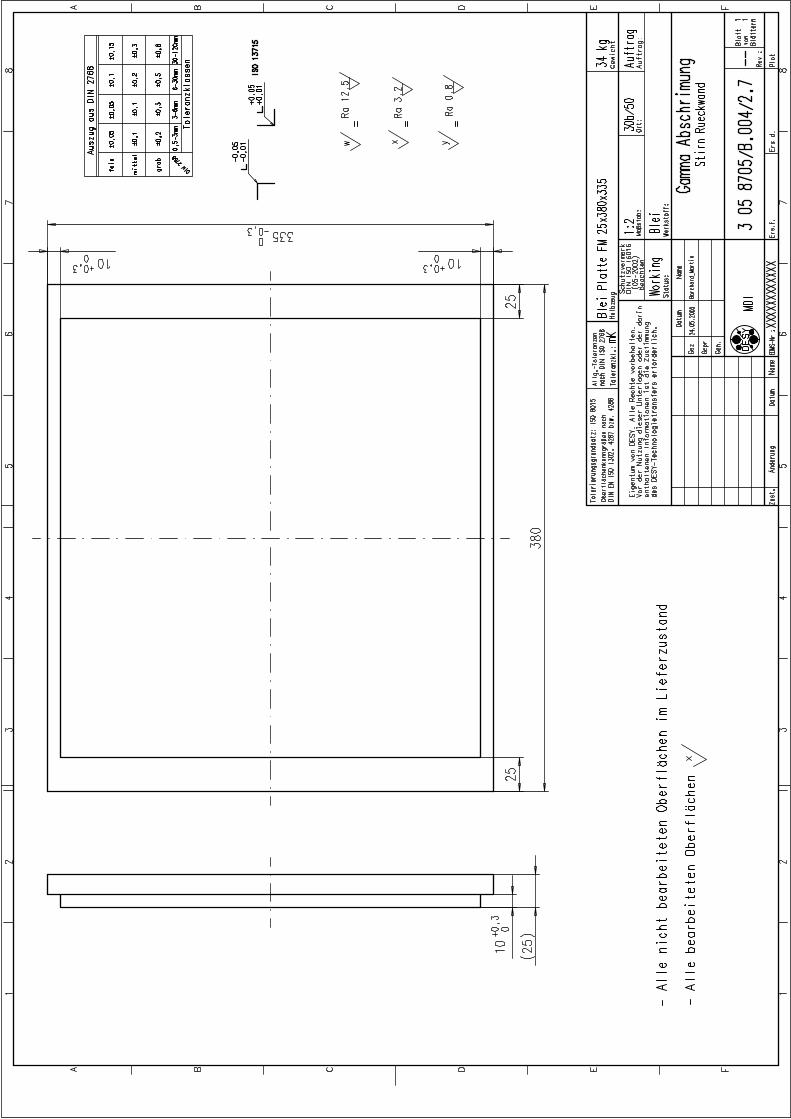
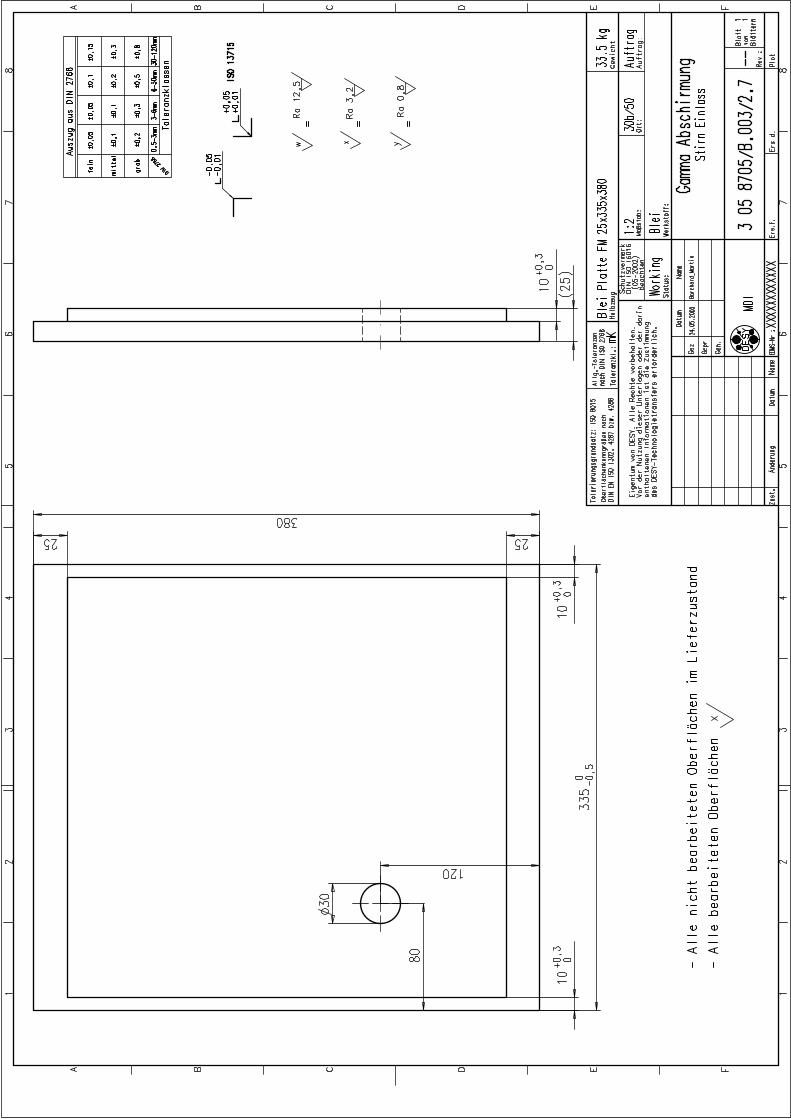
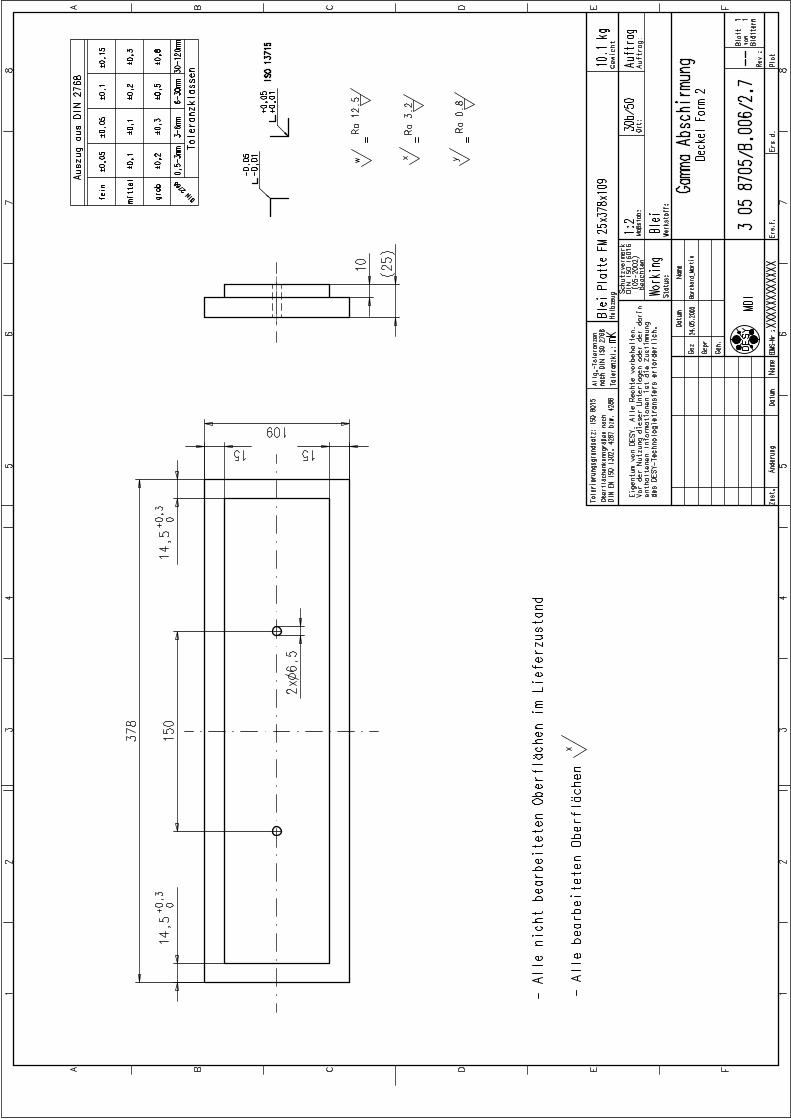
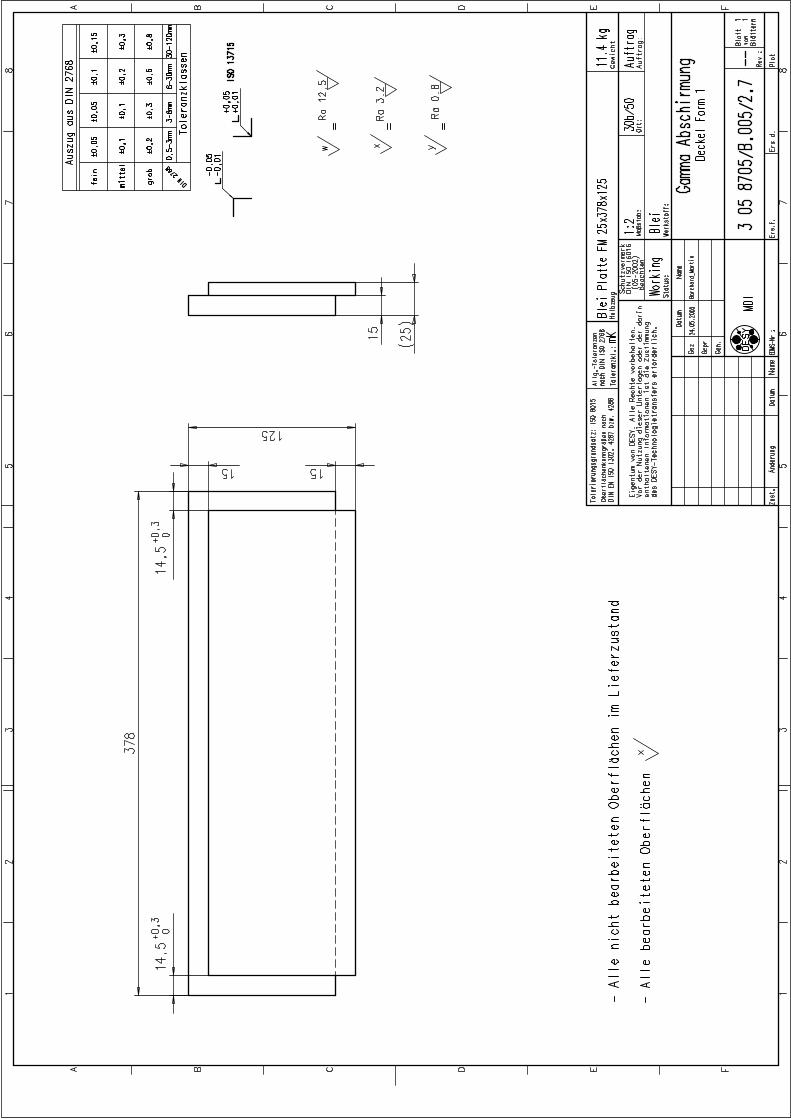
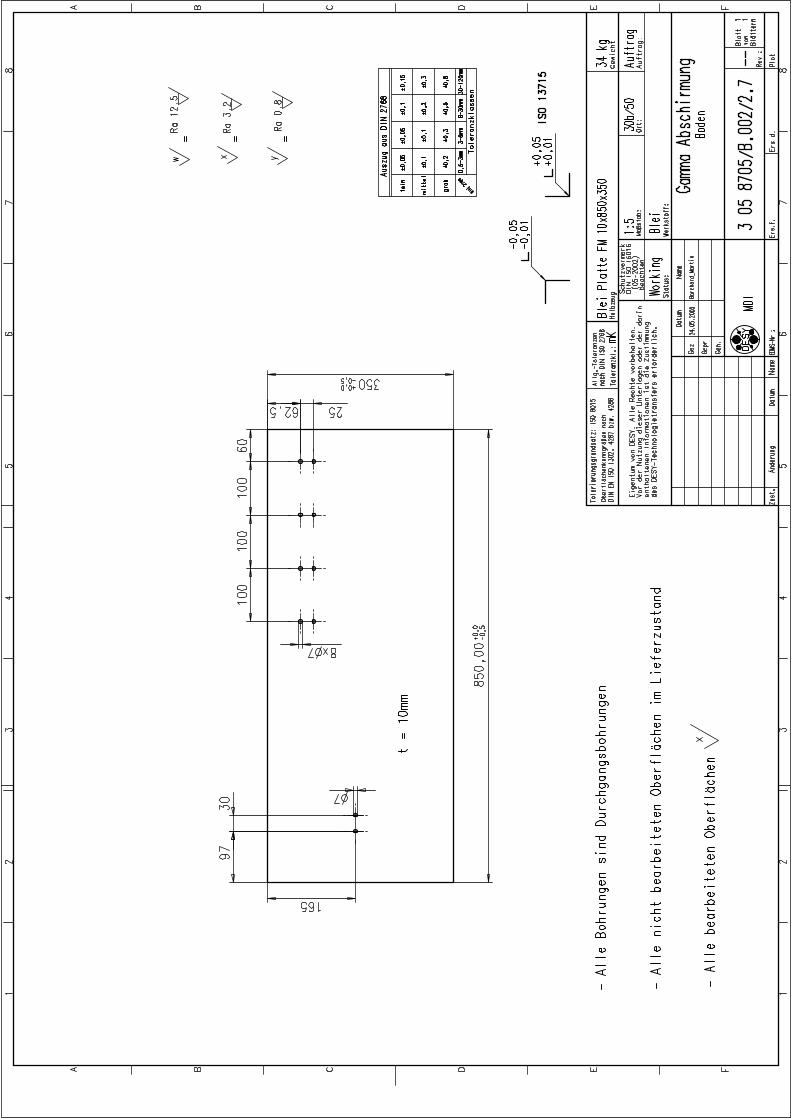
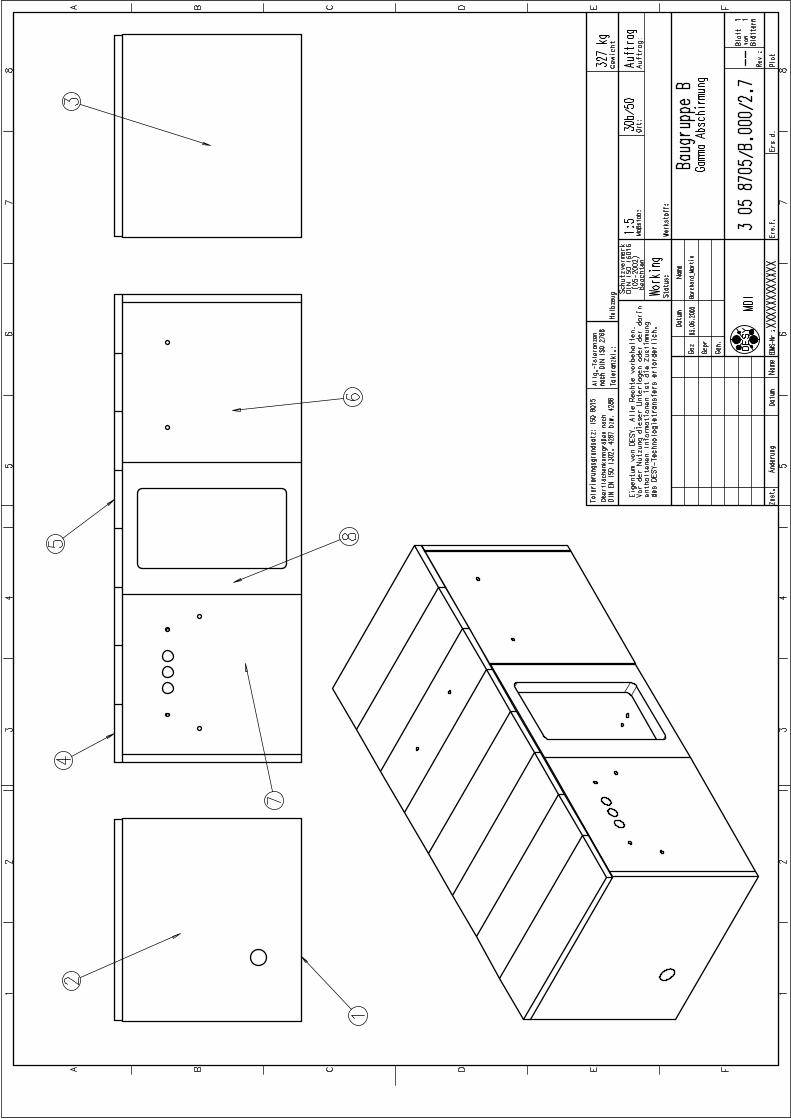
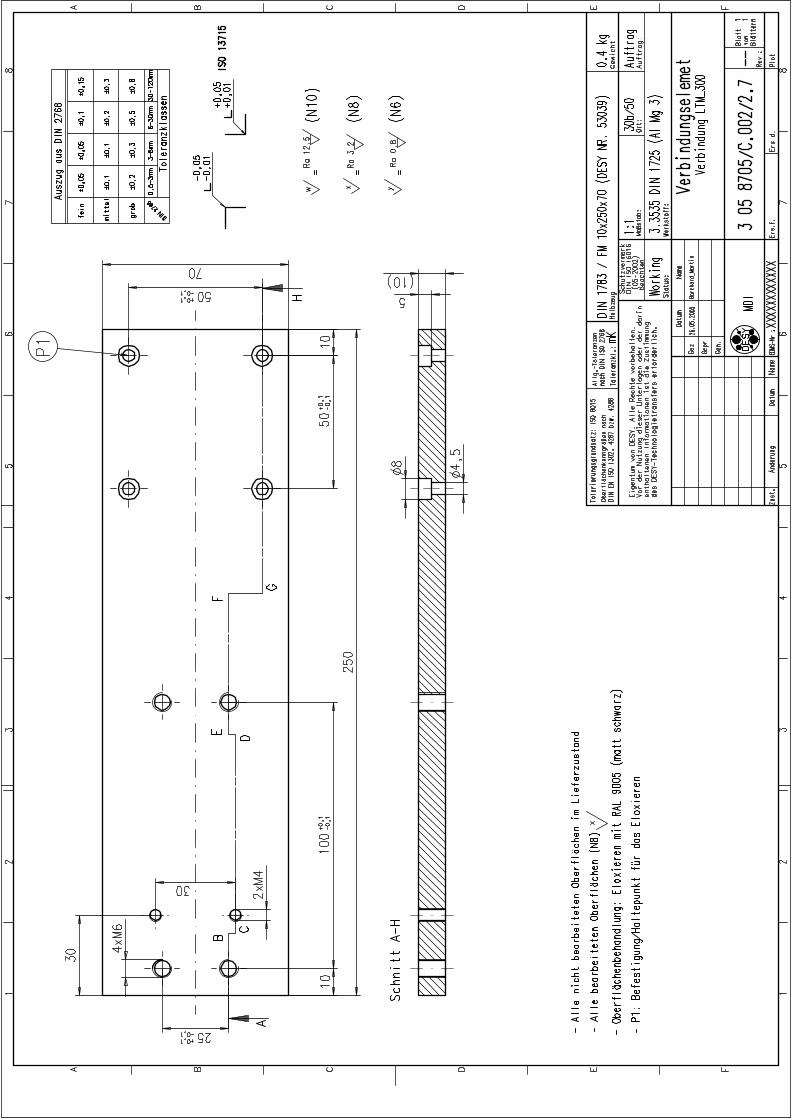
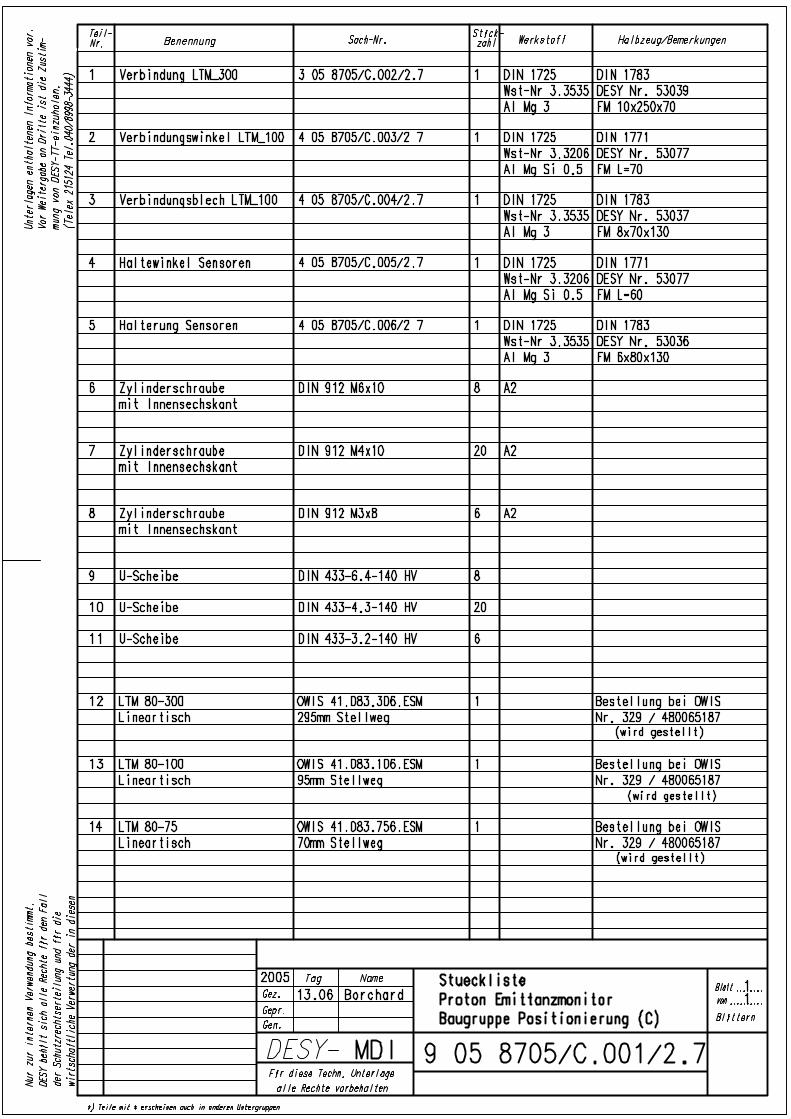
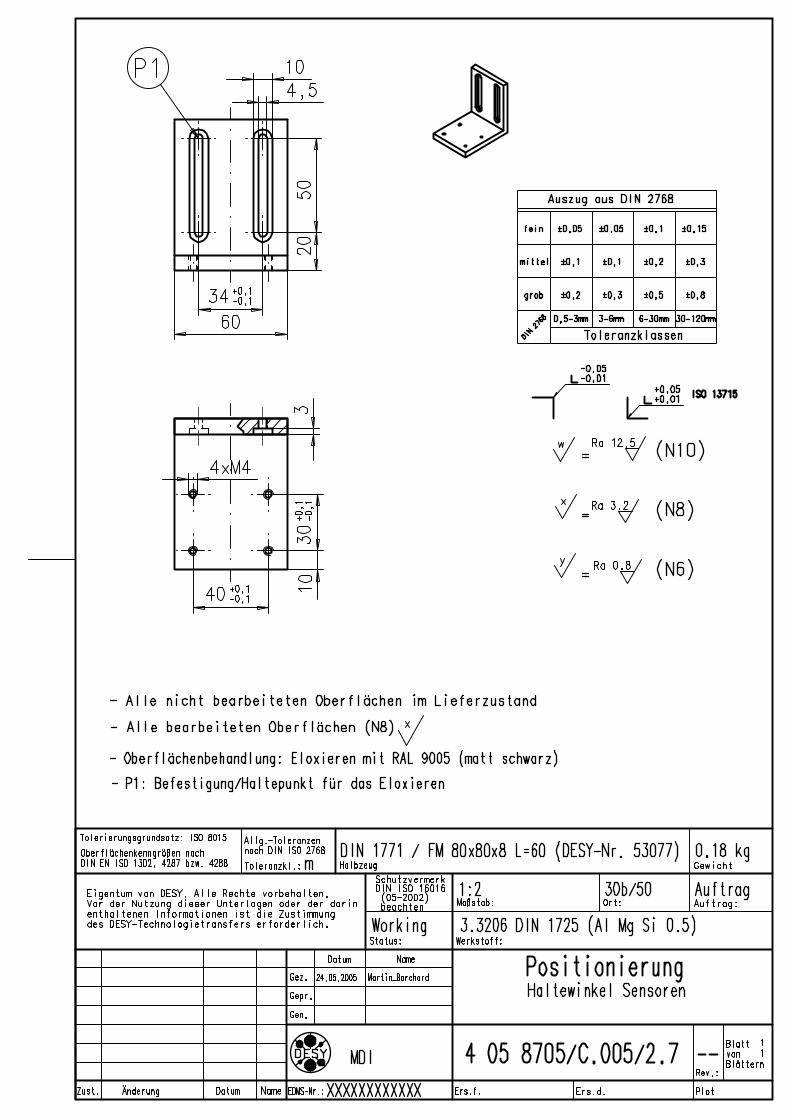
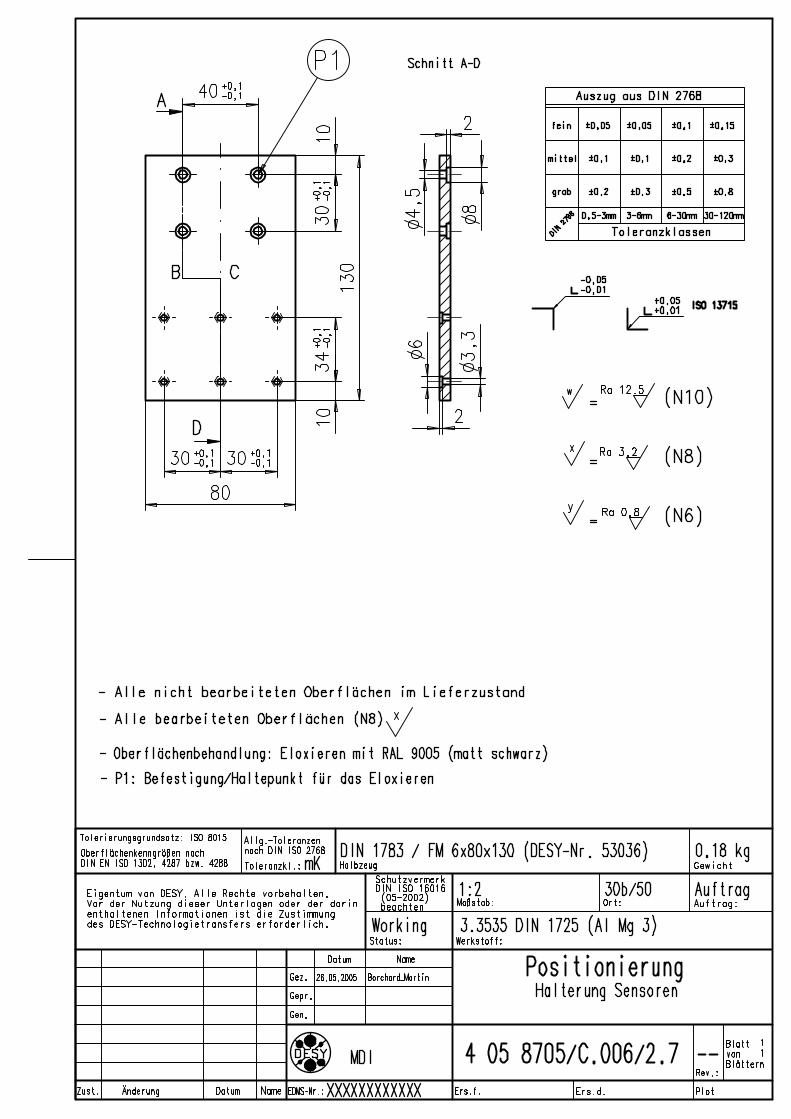

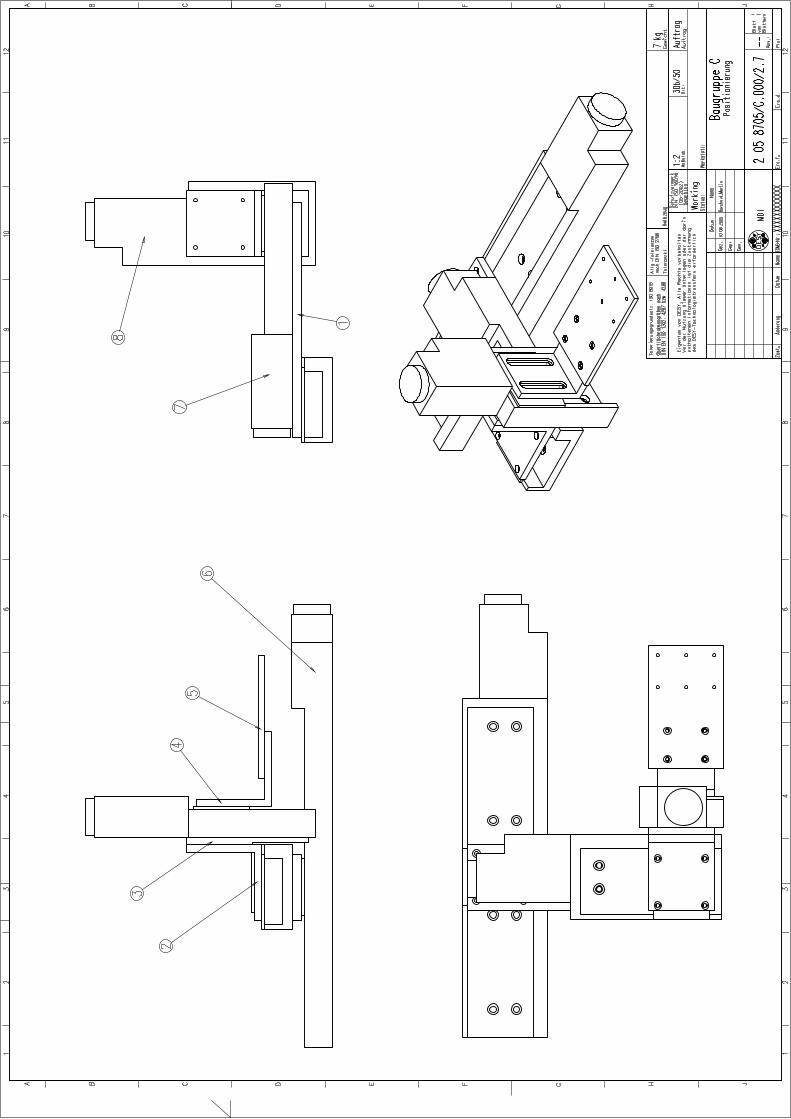
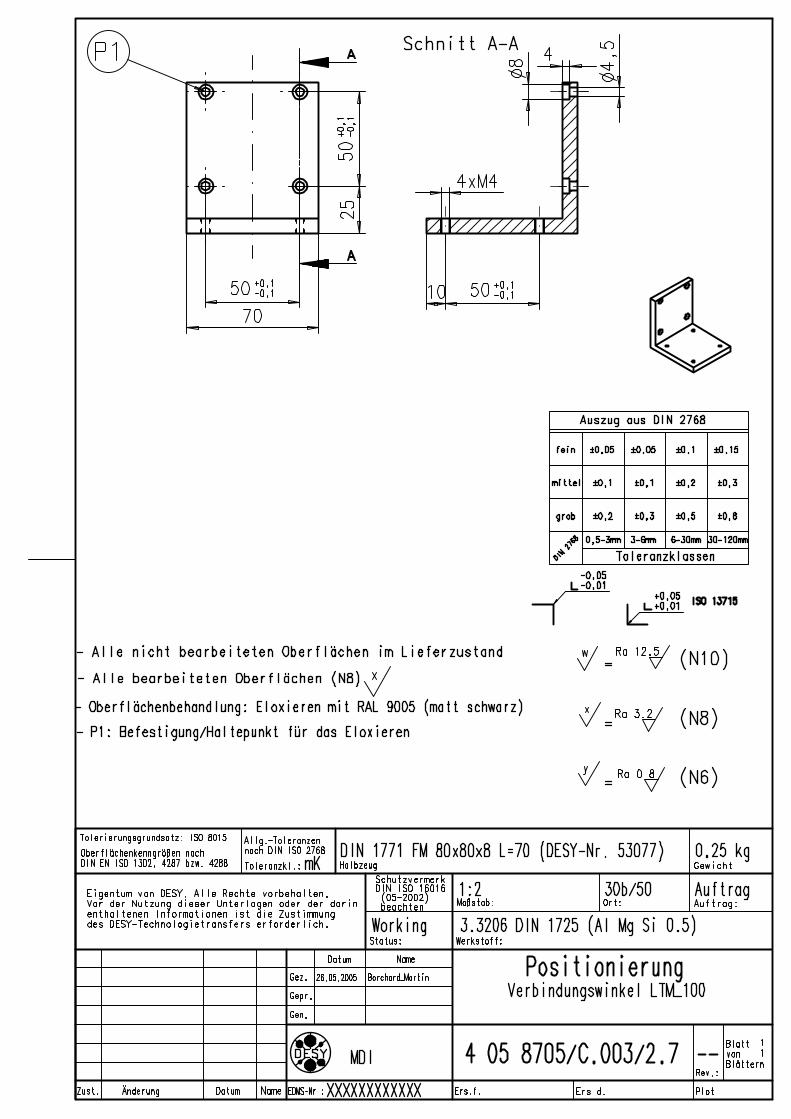
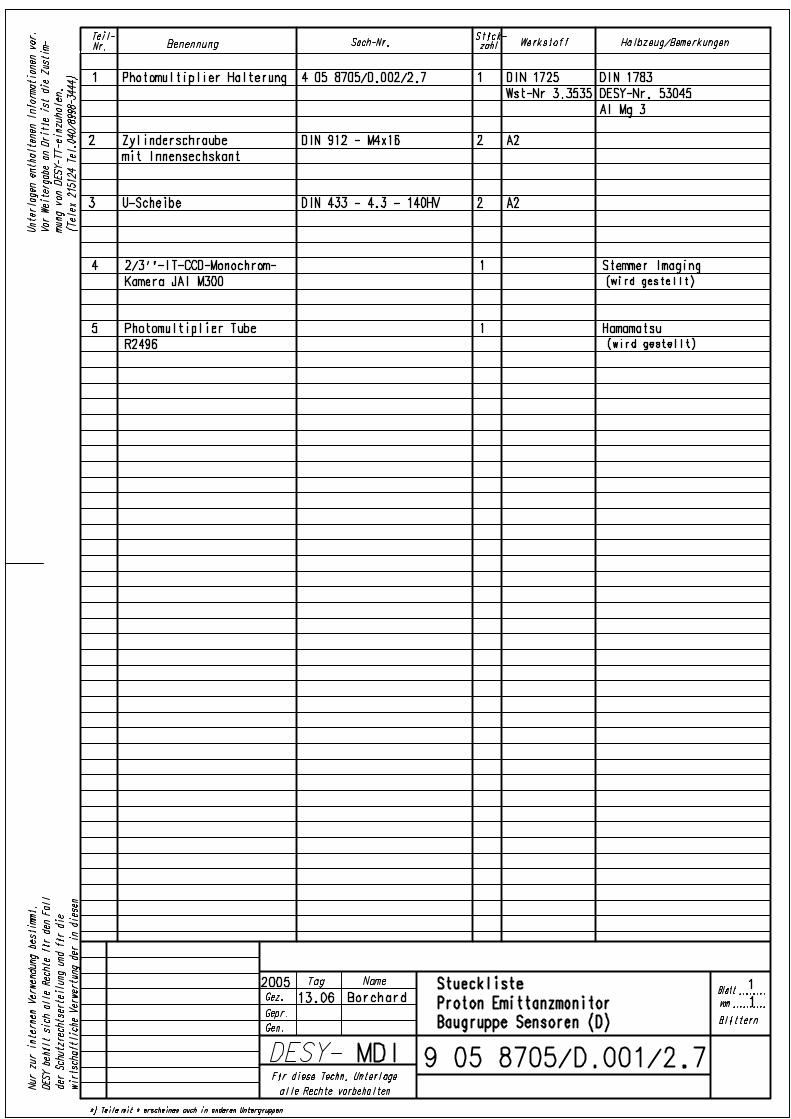
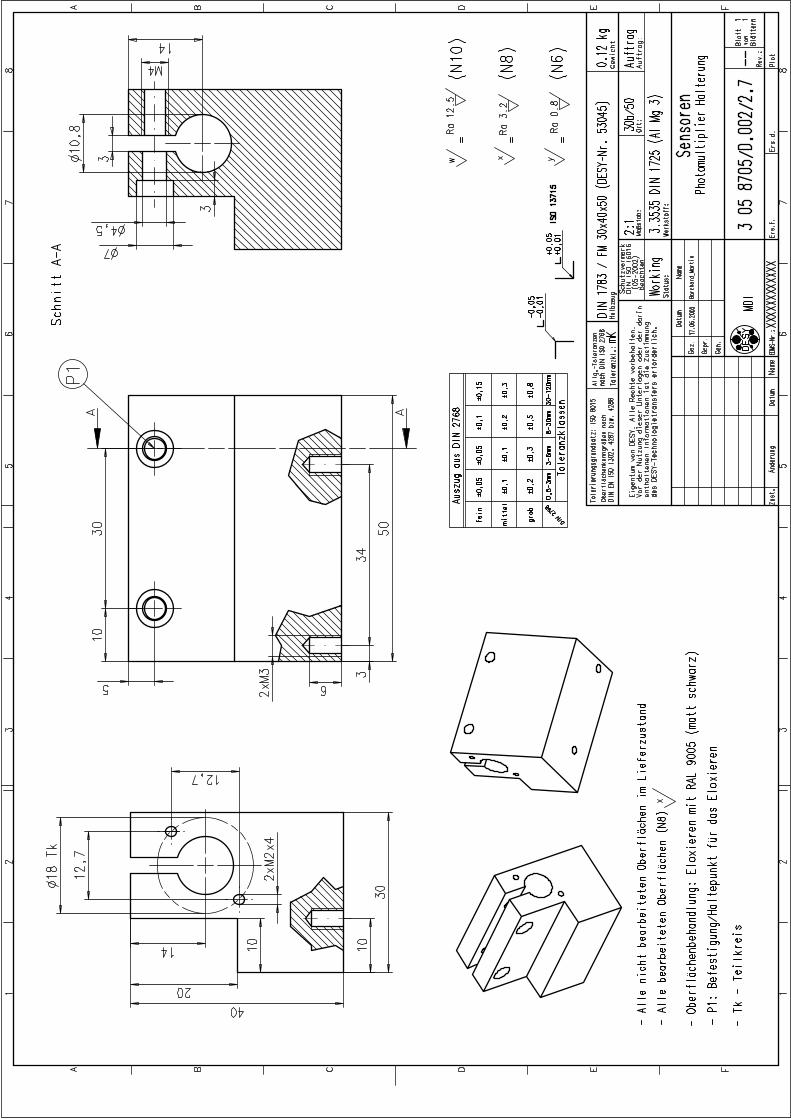
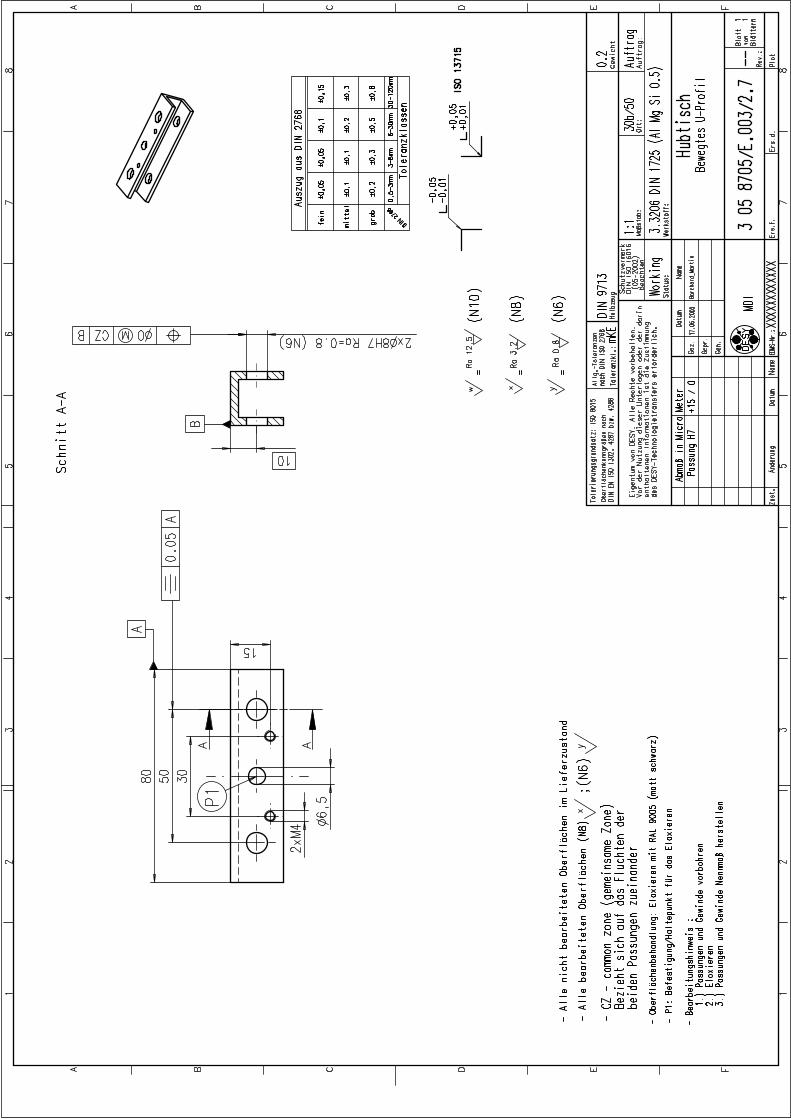
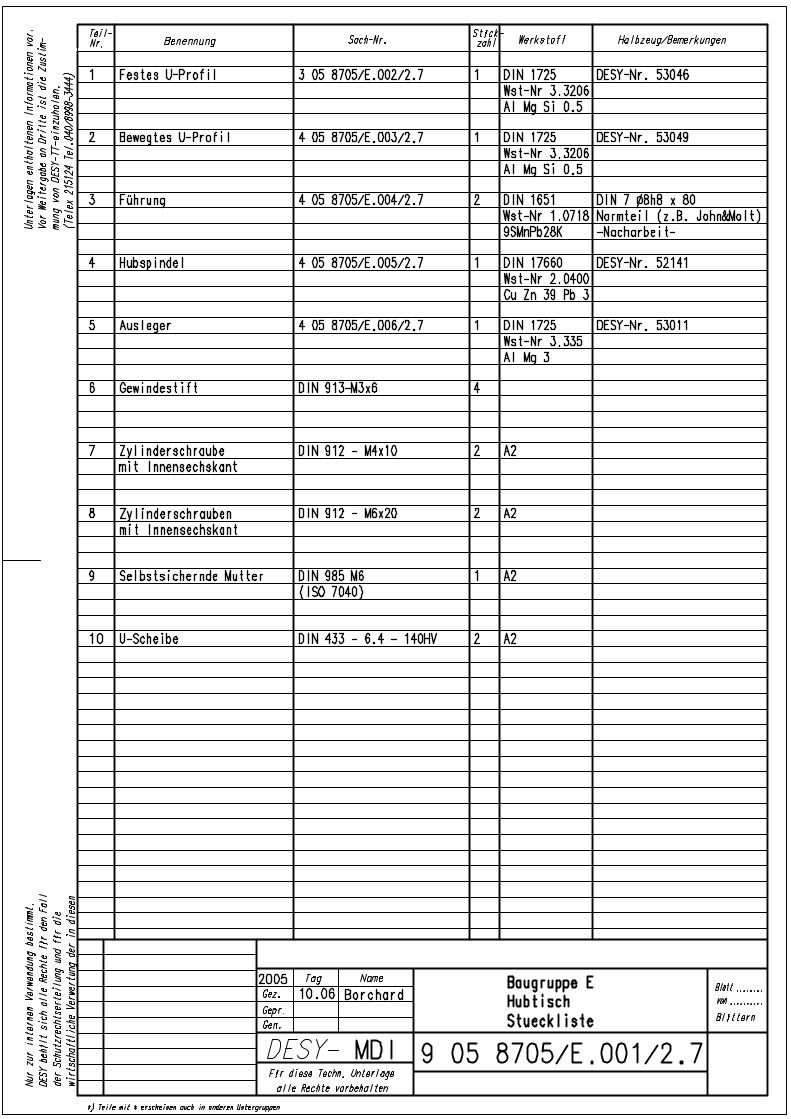
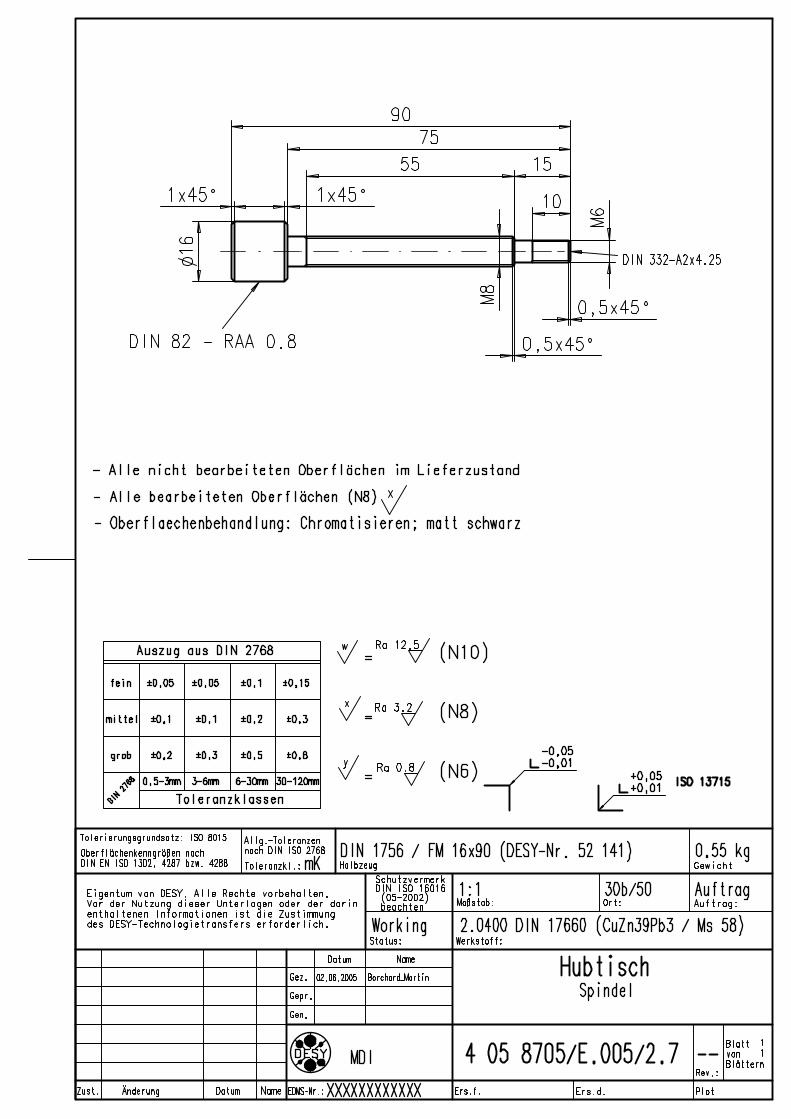
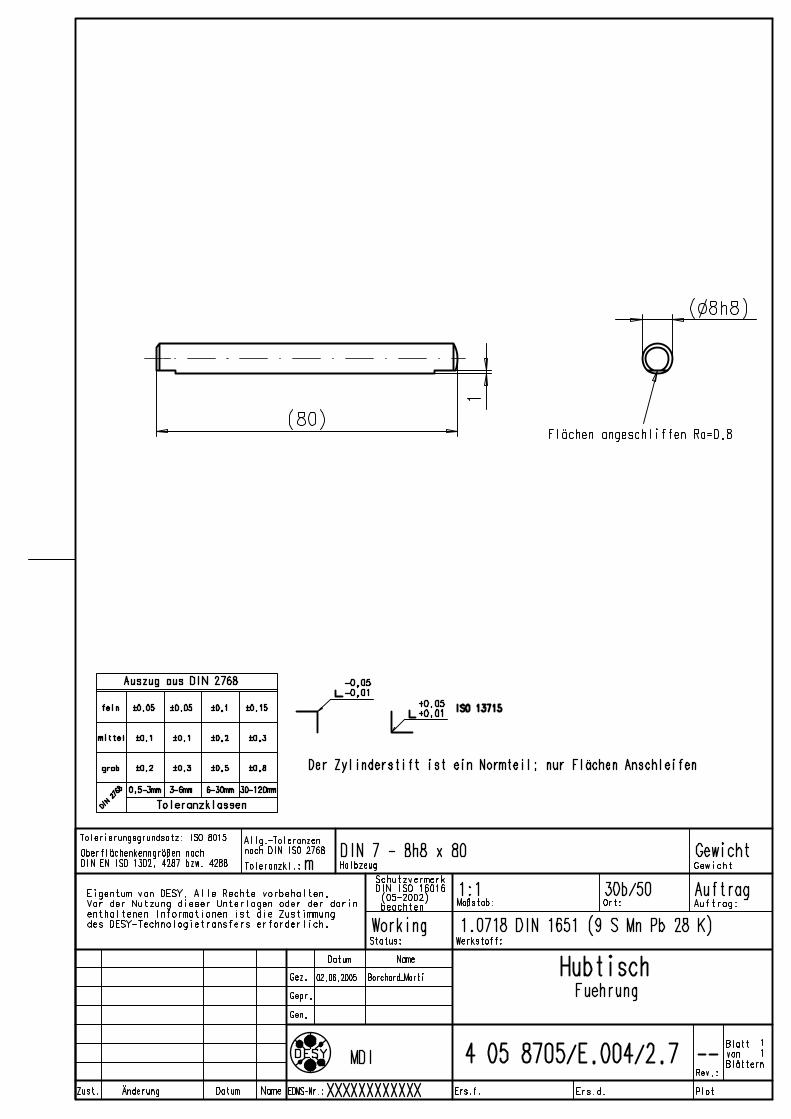
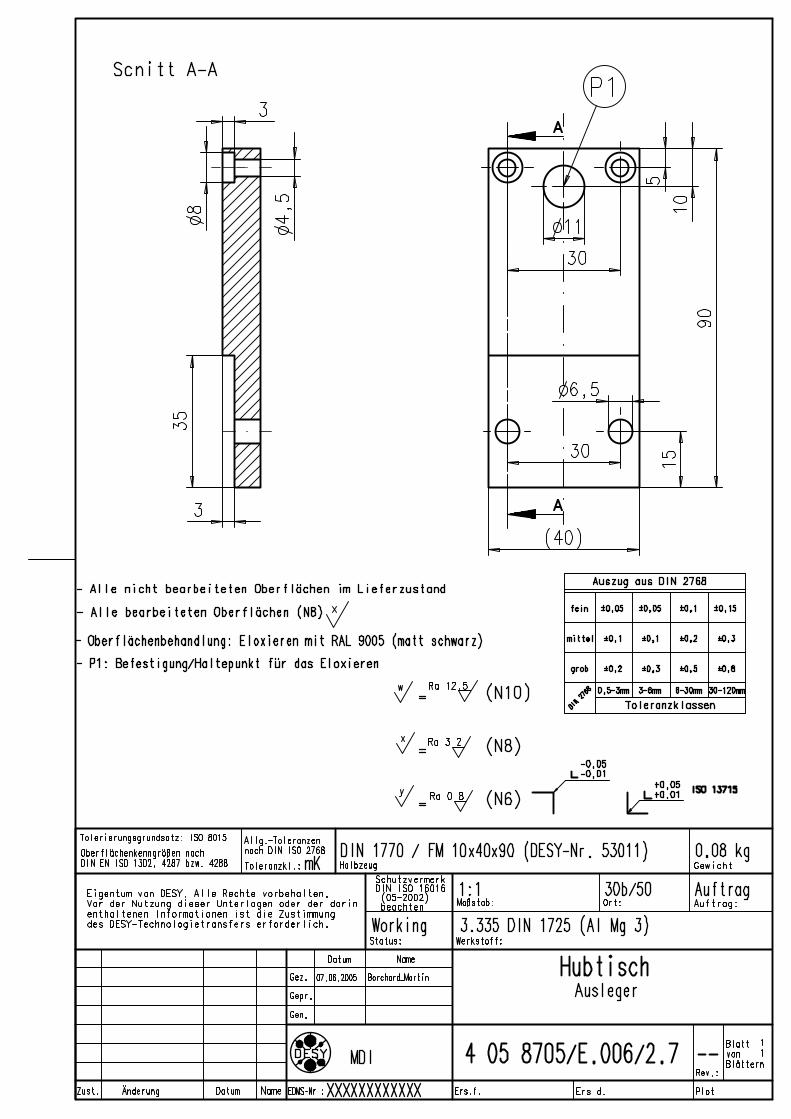
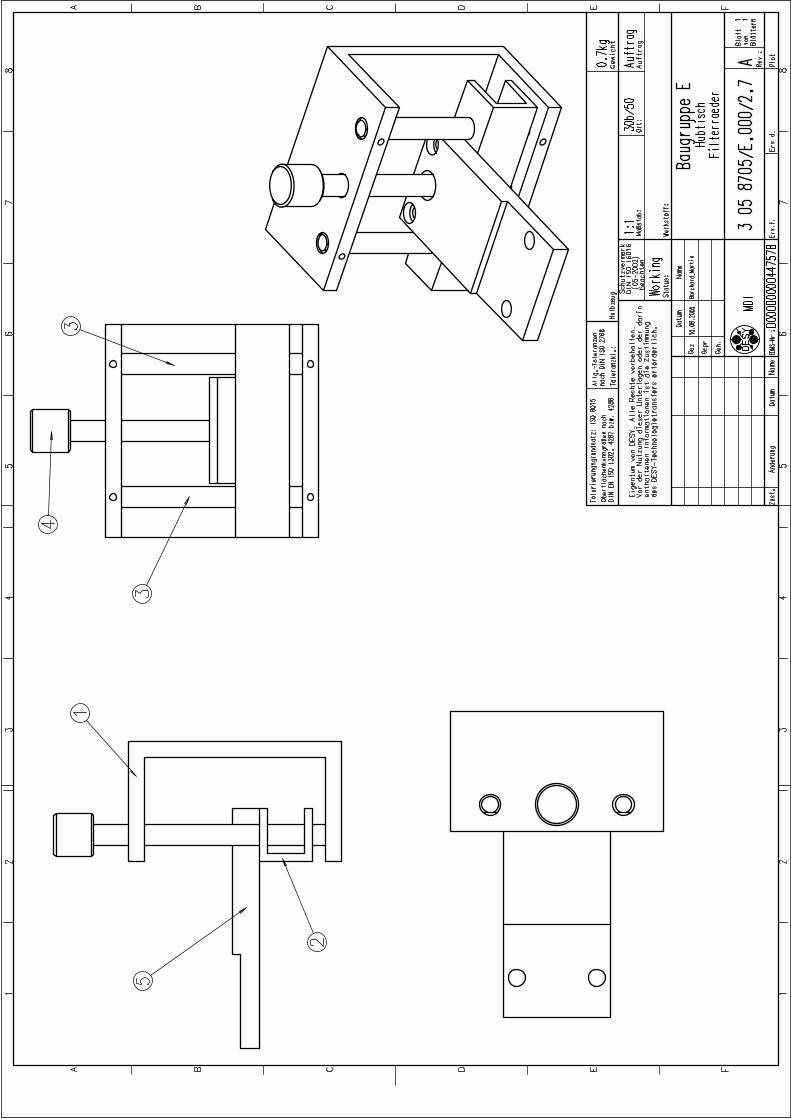
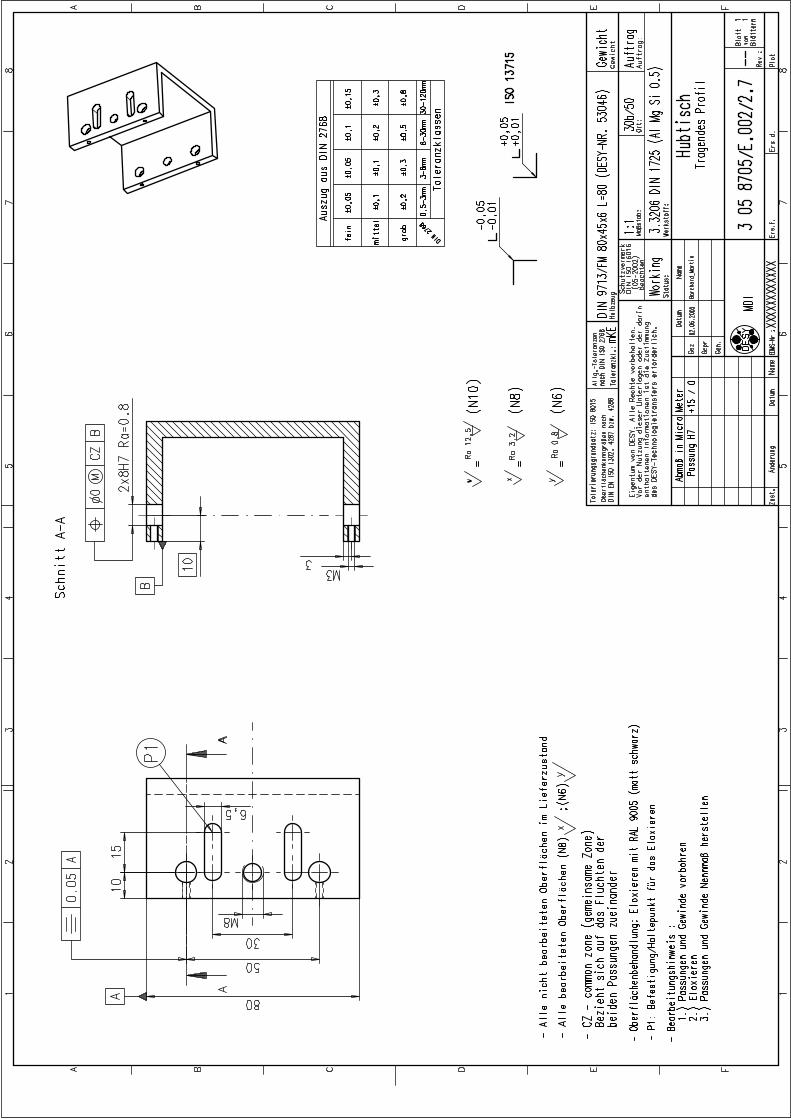
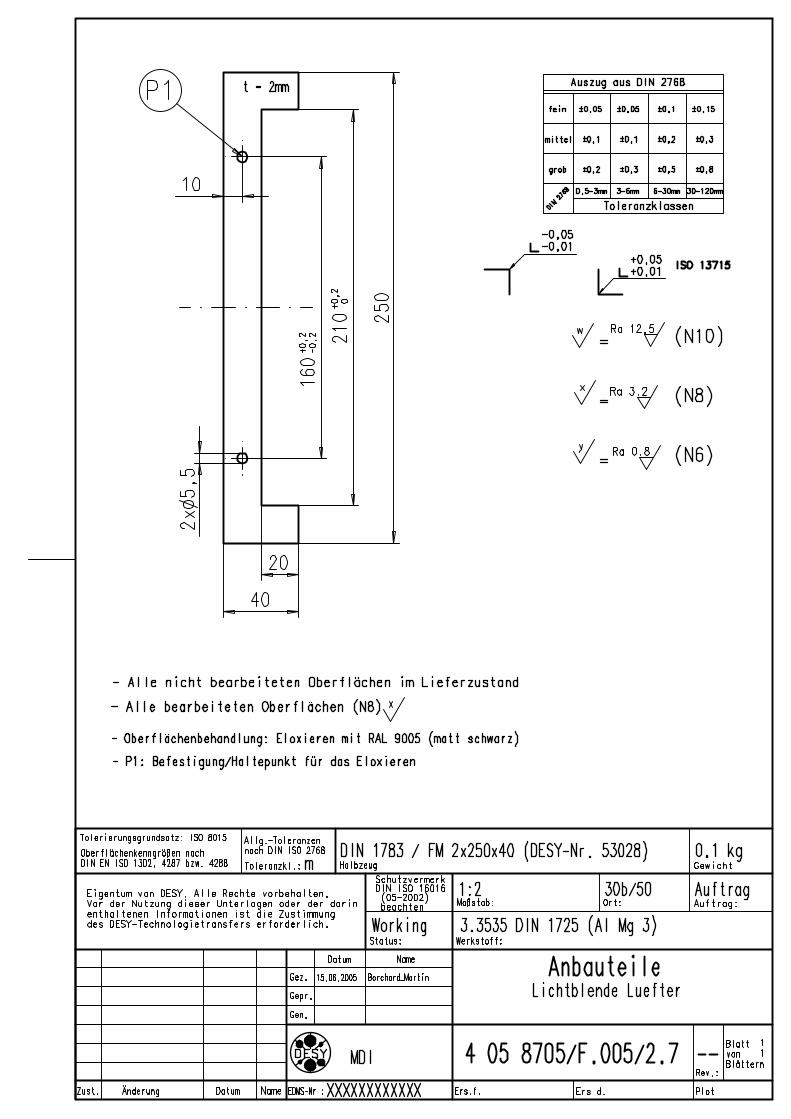

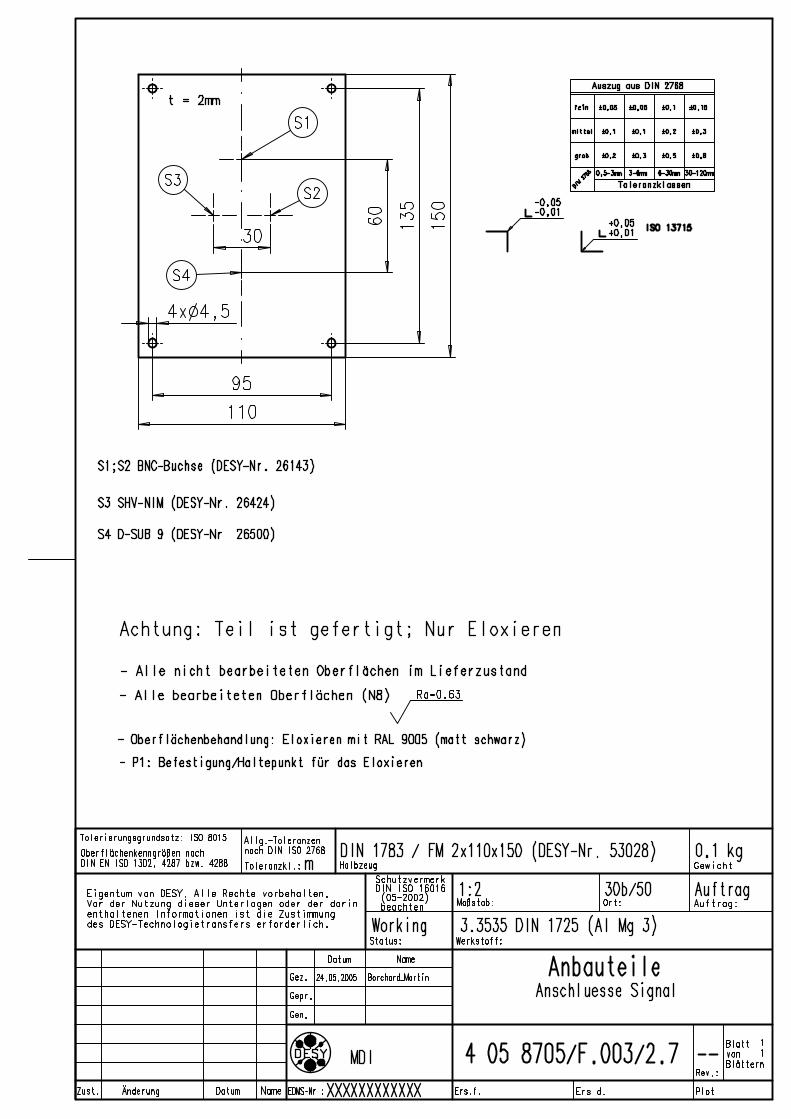

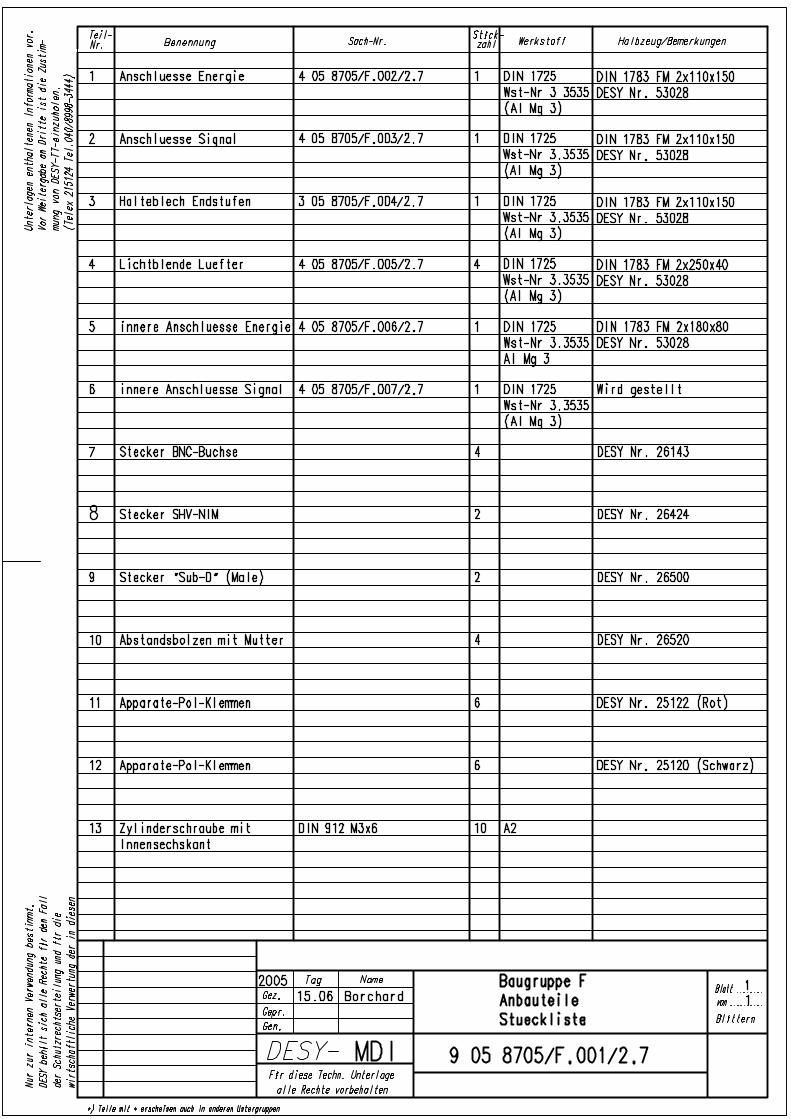
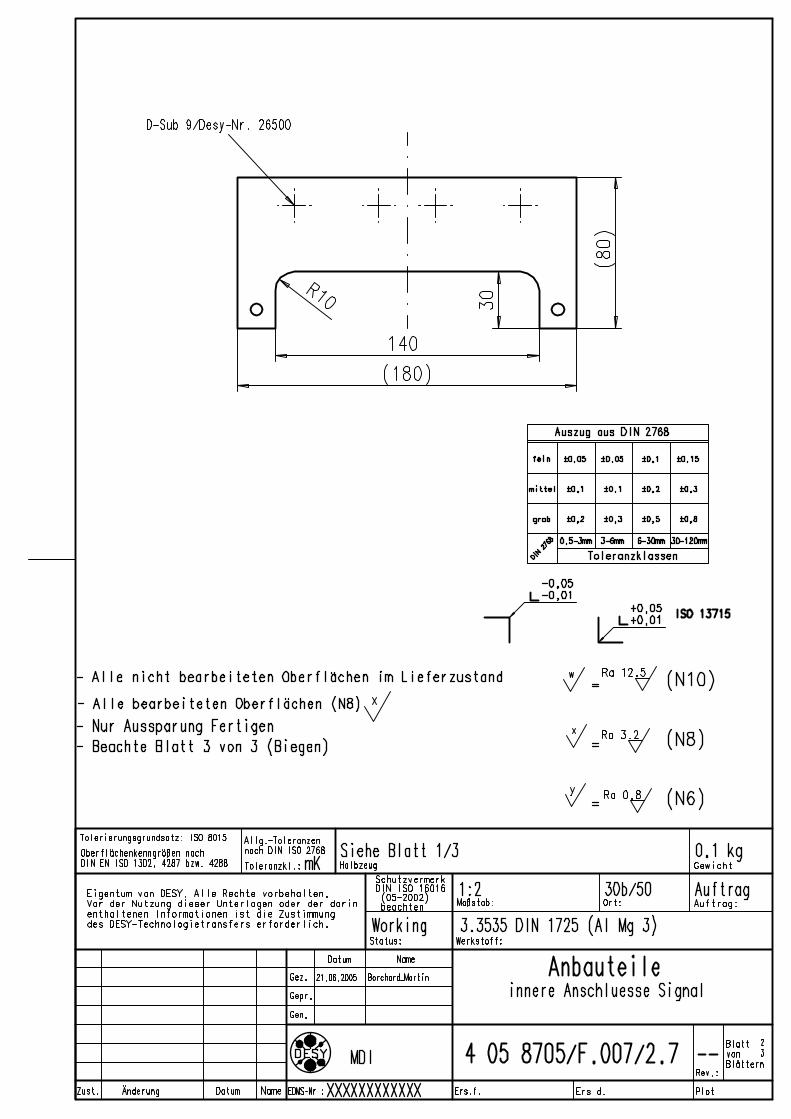
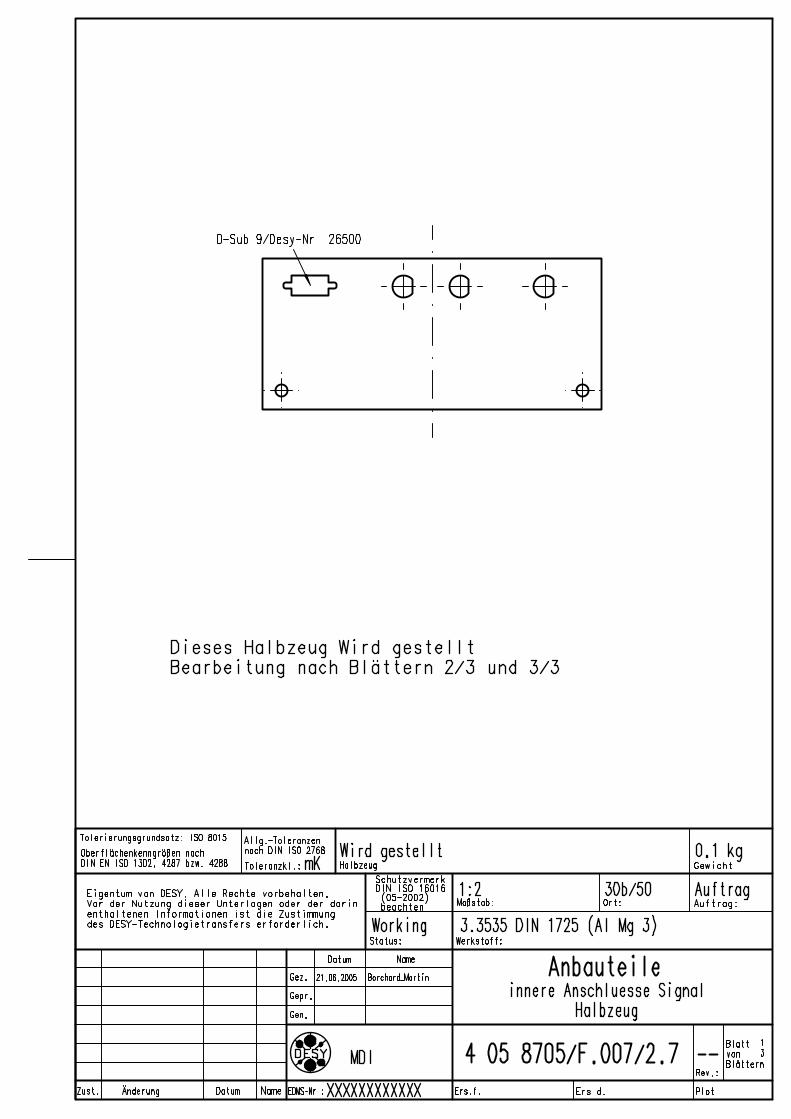
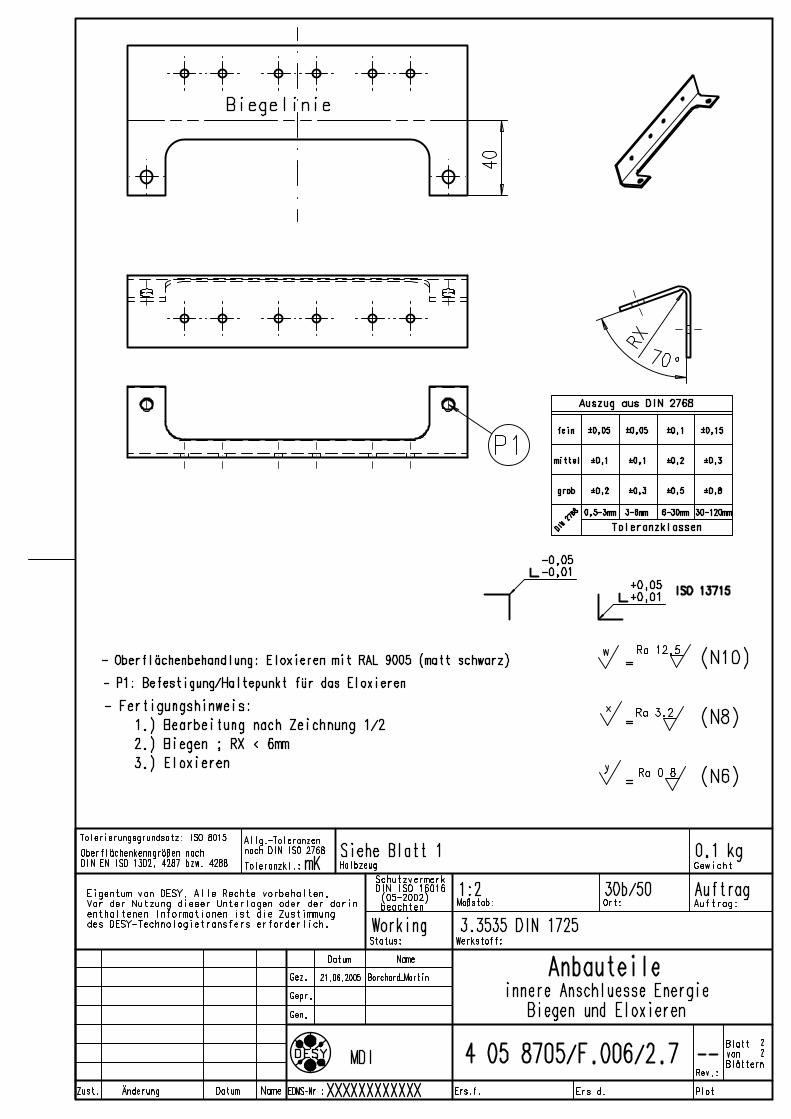

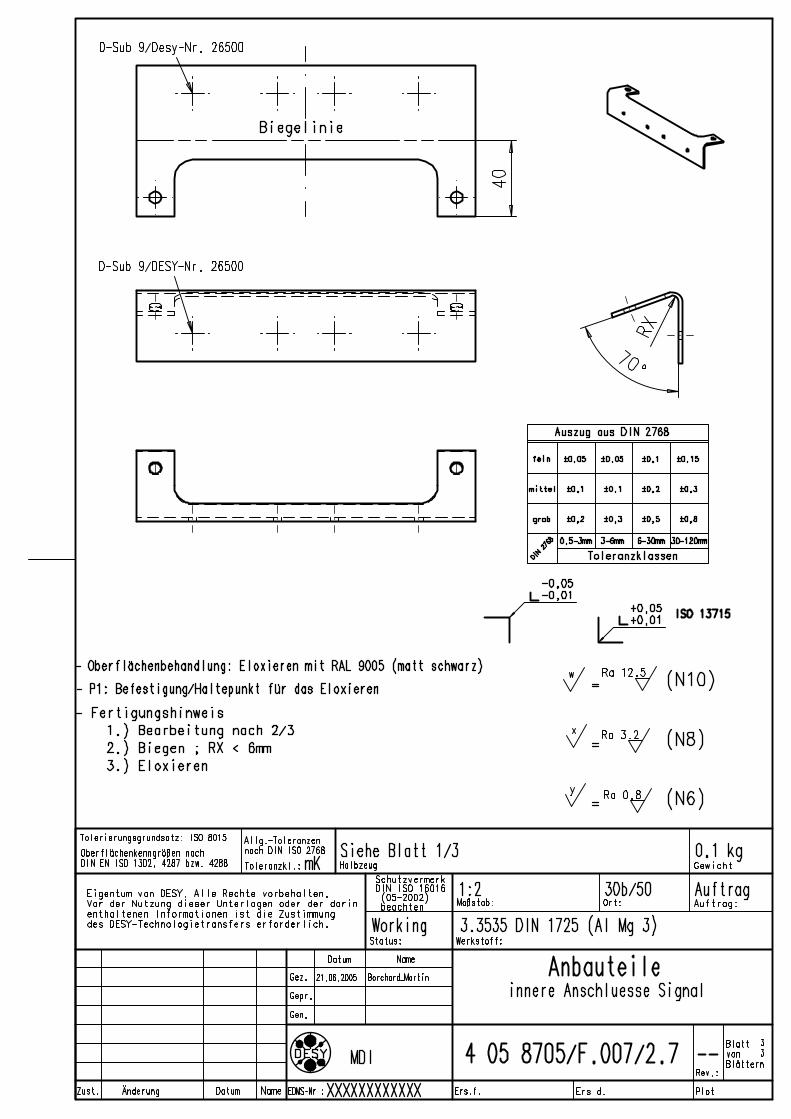
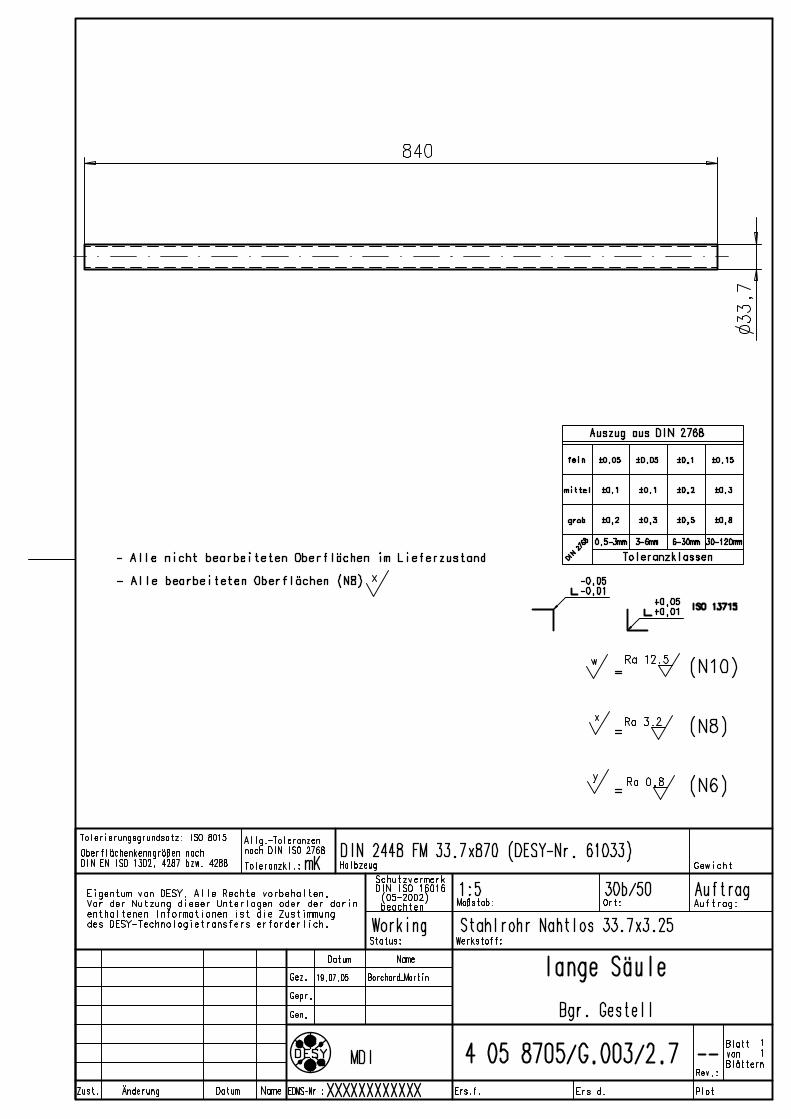
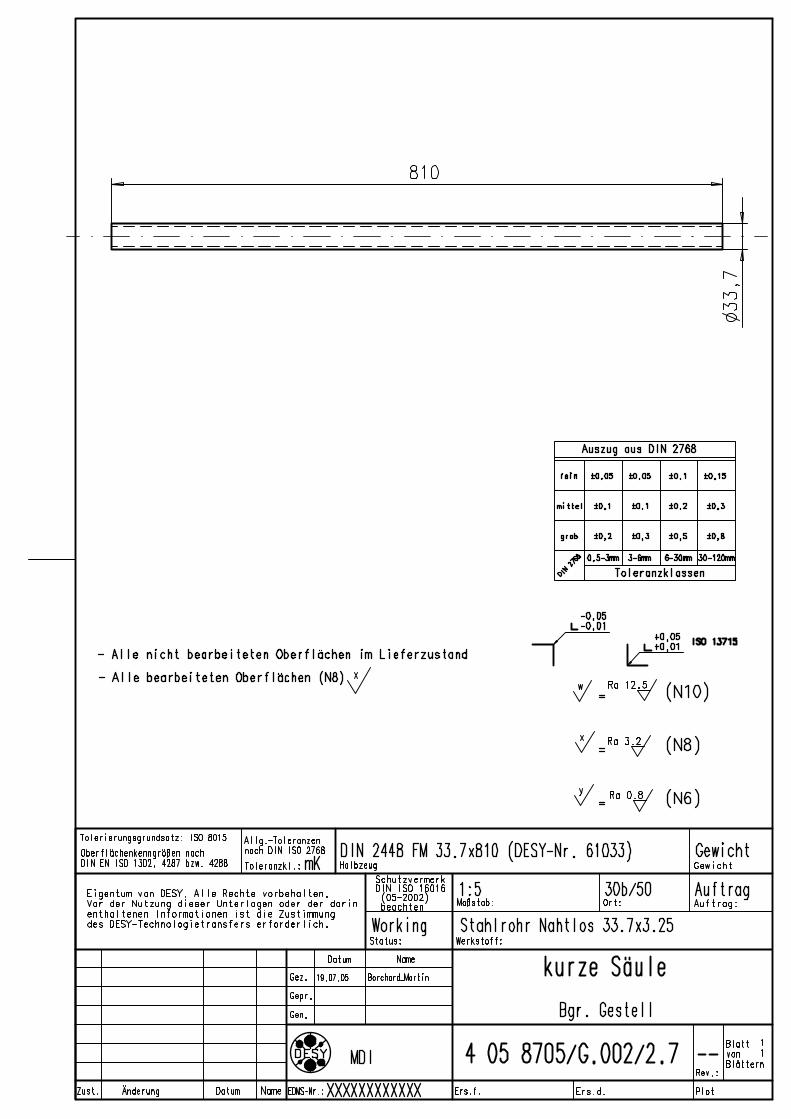


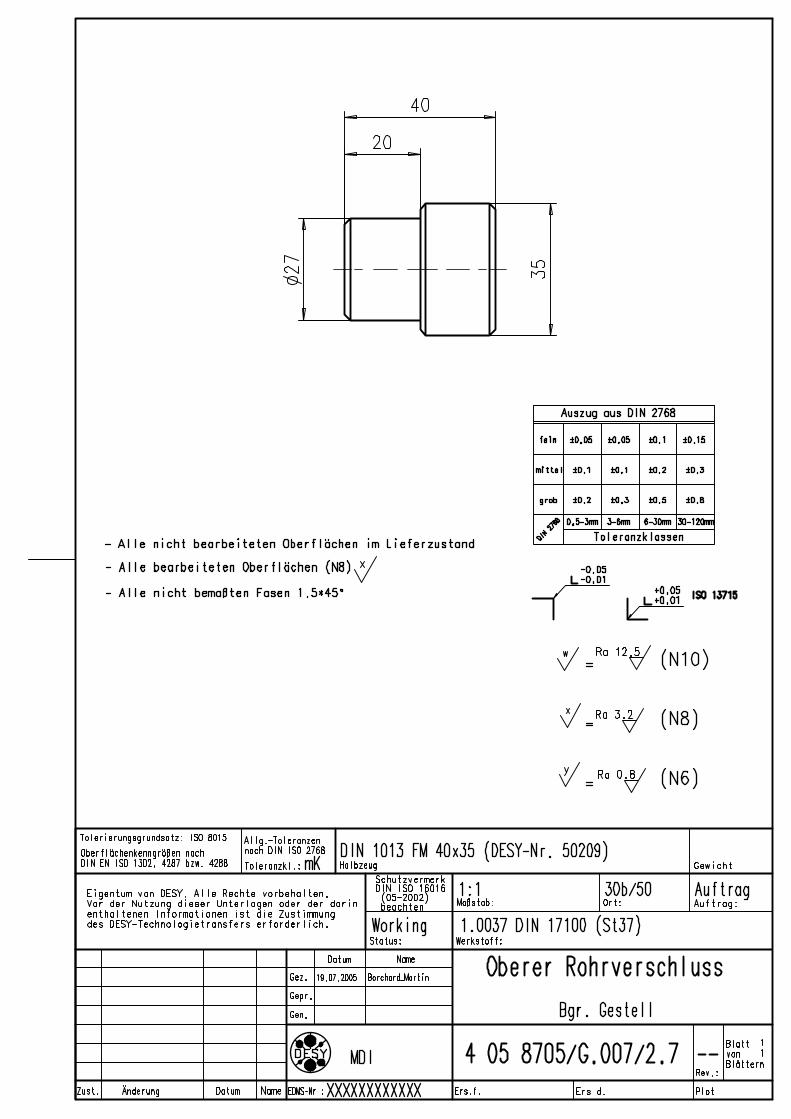
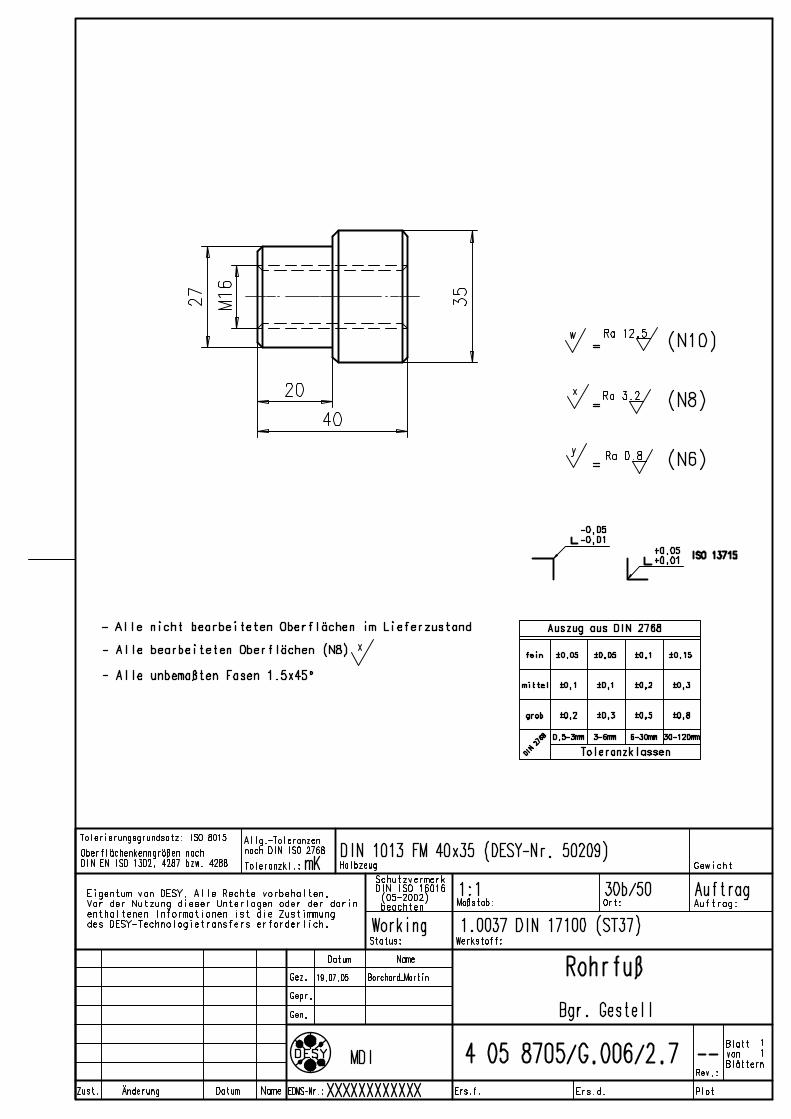
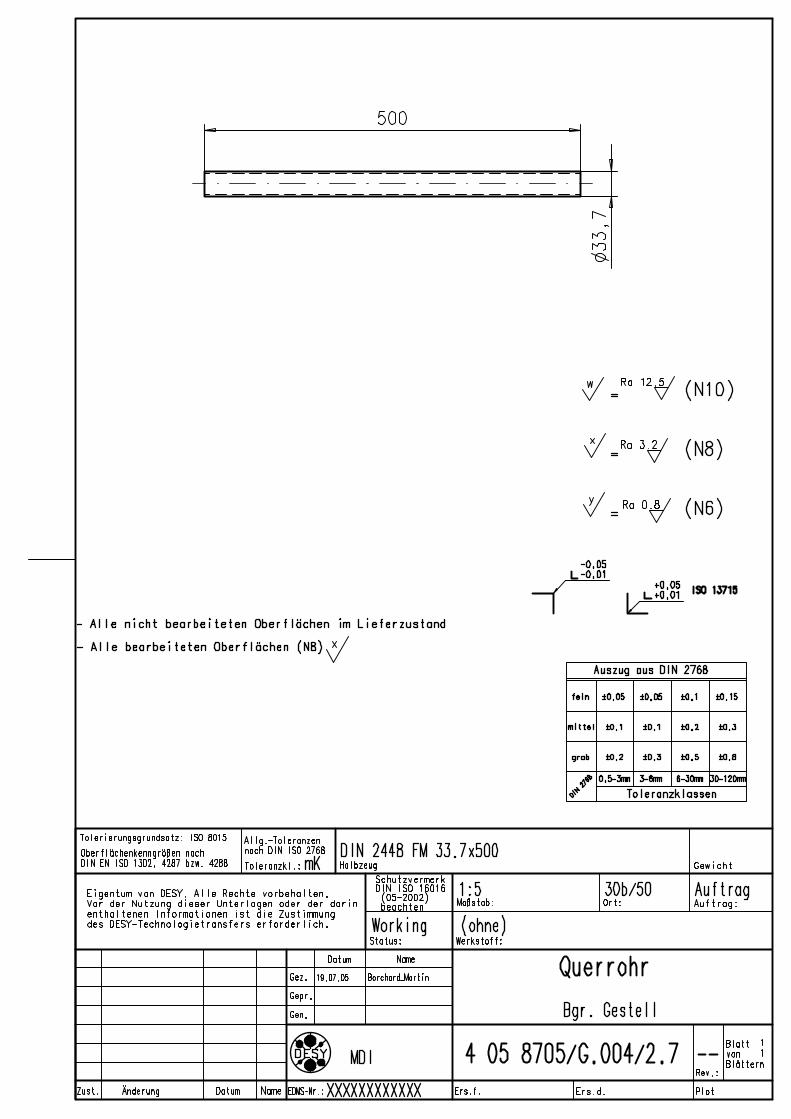
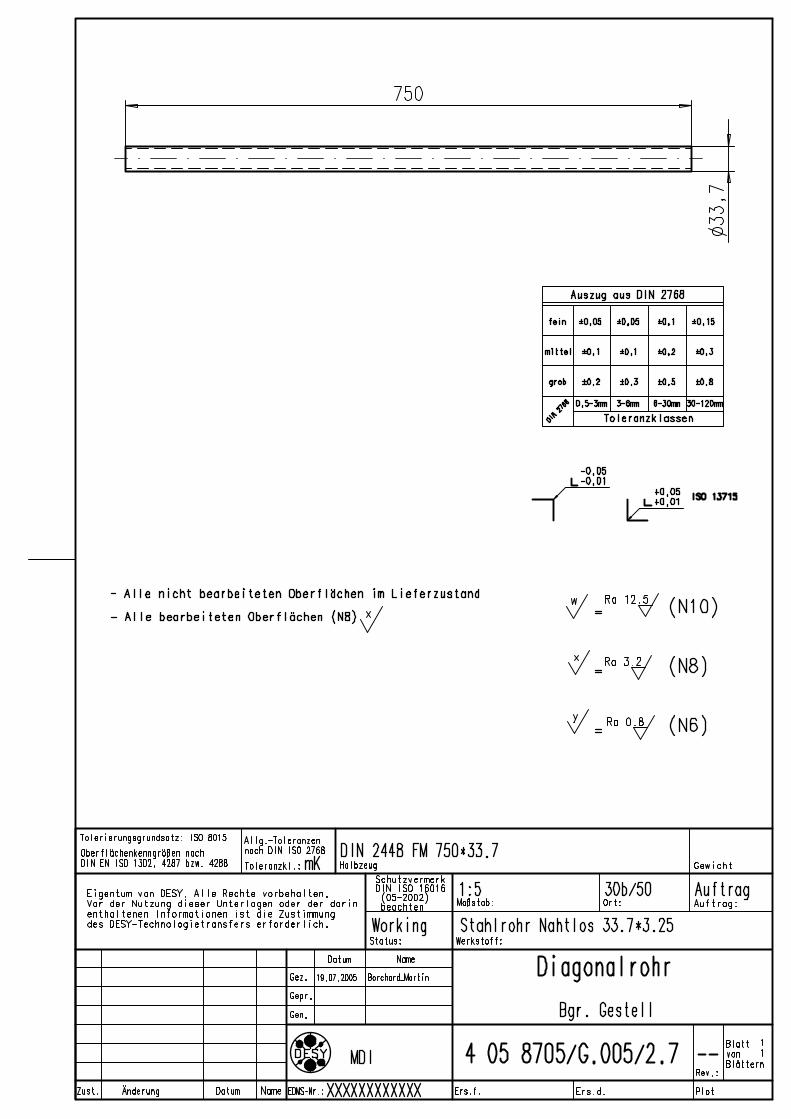
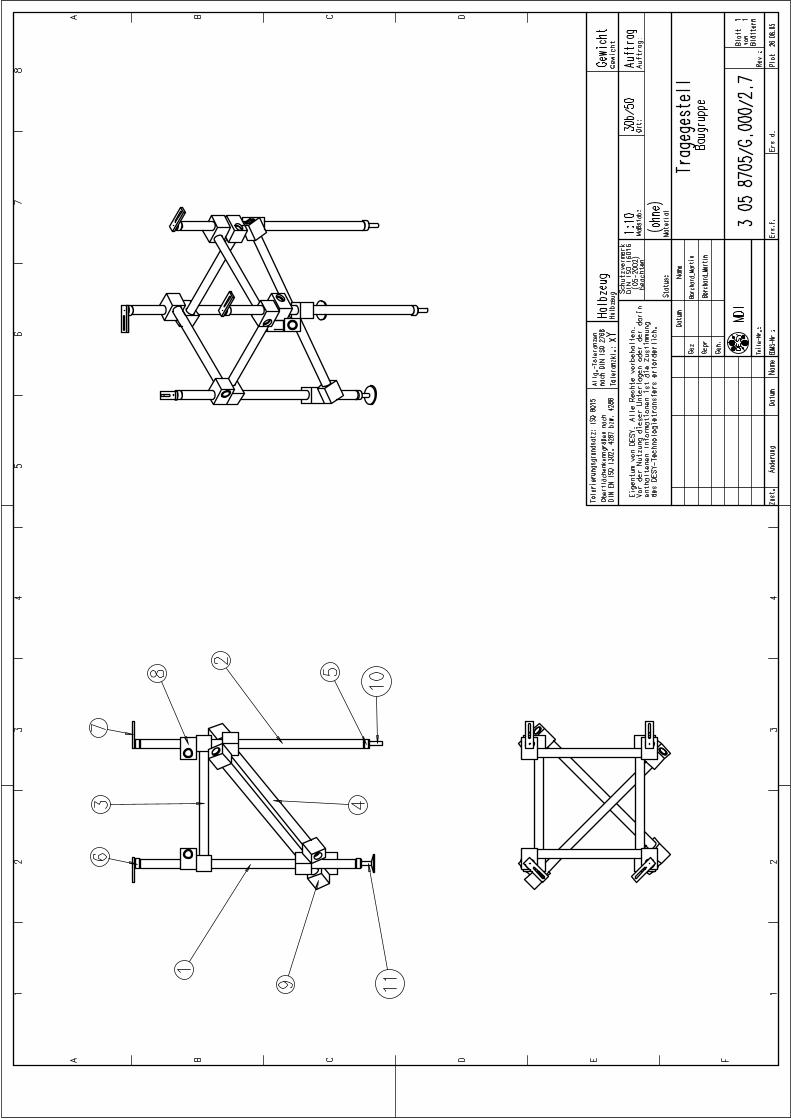
Recommended

![Literaturverzeichnis3A978-3-663... · 2017. 8. 27. · Fahrzeuggetriebe; Grundlagen, Auswahl, Auslegung und Konstruktion Berlin, Heidelberg: Springer, 1994 [5-18] MAN Nutzfahrzeuge](https://img.pdfslide.tips/doc/110x75/60e1c36e186a760c3f722a82/literaturverzeichnis-3a978-3-663-2017-8-27-fahrzeuggetriebe-grundlagen.jpg)















