
ESCUELA POLITÉCNICA NACIONAL
FACULTAD DE INGENIERÍA ELÉCTRICA
DISEÑO Y CONSTRUCCIÓN DE UN SISTEMA
DIGITAL PARA CALIBRACIÓN DE
'TERMISTORES
SDWIN JAVISR SÜQUILLO GUIJARRO
TESIS PREVIA LA OBTENCIÓN DEL TITULO DE INGENIERO
EN LA ESPECIALIZACIÓN ELECTRÓNICA Y CONTROL
QUITO, JULIO DE 1994

Certifico que el presente
trabajo ha sido realizado
en su totalidad por el
Sr. Edwin Suquillo G.
rlIng. Bolívar Ledesma
DIRECTOR DE TESIS

-gí
A mis padres
Rosa y Segundo
y a mi hermano
Santiago
A GRADECIMIENTO
Al Ing- Bolívar Ledesma por su acertada
dirección en este trabajo, a mi hermana
Ca ty y a la señor i ta Silvia Yépez
! GRACIAS !.
ÍNDICE
Pag.
INTRODUCCIÓN i
CAPITULO 1 GENERALIDADES.
1.1 El termistor como sensor de temperatura 1
1.1.1 S e n s o r e s de t e m p e r a t u r a u t i l i z a n d o
semiconductores 1
1.1.2 Terminología del termistor 4
1.1.3 Utilización de los termistores 7
1.1.3.1 Calorímetros 8
1.1.4 Ecuaciones de los termistores 12
1. 2 Técnicas de Calibración 14
1.2.1 Características de actuación 15
1.2.2 Comportamiento estático 16
1.2.3 Comportamiento dinámico 21
1.2.4 Errores de calibración 22
1.3 Técnicas y sistemas de adquisición de datos 24
1.3.1 Sistemas de adquisición de datos. 25
1.3.3 Técnicas de adquisición de datos 27
CAPITULO 2 REQUERIMIENTOS Y DISEÑO DEL HARDWARE.
2 .1 Especificaciones 30
2.1.1 Descripción del Sistema Calther 30
2.2 Circuito acondicionador de señal 34
2.2.1 Tipos de fuente de corriente 35

2.2.2 Ventaj as y desventad as de las fuentes de
corriente '. 41
2.2.3 Fuente de corriente de precisión de 10 uA 41
2.2.4 Amplificador de señal 43
2.3 Circuito análogo - digital 47
2.3.1 Demultiplexor analógico 48
2.3.2 Conversor análogo - digital 50
2.3.2.1 Funcionamiento 52
2.3.2.2 Ajuste del rango de conversión 53
2.3.3 Microcontrolador D8751H 54
2.3.3 Comunicación Calther - computador 58
CAPITULO 3 DISEÑO DEL SOFTWARE.
3.1 Programa supervisor en el microcontrolador 8751 61
3.1.1 Programa principal 66
3.1.2 Selección del canal analógico 67
3.1.3 Subrutina para medición del canal seleccionado.. 68
3-1.4 Subrutina para transmisión de datos 70
3.1.5 Diagrama de bloques del programa 71
3.2 Programas para la comunicación de datos 72
3.2.1 Especificaciones iniciales 72
3.2.2 Programa principal 75
3.2.3 Subrutina para el cálculo del valor medio 84
3.2.4 Subrutina para verificación de la comunicación
serial 85
3.2.5 Diagrama de bloques del programa 87
3.3 Programas para el procesamiento de datos 87
3.3.1 Generación de las tablas de calibración 88
3.3.1.1 Programa principal 89
3.3.1.2 Subrutina para la lectura de los puntos de

calibración 91
3.3.1.3 Subrutina para el cálculo de los coeficientes del
termistor 94
3.3.1.4 Subrutina para impresión de los resultados 97
3.3.1.5 Diagrama de bloques del programa 102
3.3.2 Programa para el manejo de archivos 102
3.3.2. 1 Menú principal 103
3.3.2.2 Pantalla de información 108
3.3.2.3 Diagrama de bloques del programa 108
CAPITULO 4 PRUEBAS Y RESULTADOS.
4. 1 Pruebas de funcionamiento , 109
4.1.1 Operación del sistema 109
4.1.2 Mantenimiento del sistema 111
4.1.3 Calibración del sistema 113
4.1.4 Calibración de termistores 114
4.1.5 Medición de temperatura 117
4. 2 Resultados obtenidos 118
4. 3 Análisis técnico económico 124
4.3.1 Especificaciones técnicas 124
4.3.2 Análisis técnico 125
4.3.3 Análisis económico 127
CAPITULO 5 CONCLUSIONES,
5.1 Discusión de los resultados obtenidos 131
5 . 2 Conclusiones 133
5 . 3 Recomendaciones 135
BIBLIOGRAFÍA ' 138

ANEXOS
1. Diseño de las fuentes de polarización 140
2. Curvas de resistencia y valor decimal 148
3. Determinación de polinomio de aproximación de valor
decimal a resistencia 152
4. Comportamiento estático canal cero (O) 155
5. Comportamiento estático canal uno (1) 158
6. Comportamiento estático canal dos (2) 161
7. Comportamiento estático canal tres (3) 164
8. Comportamiento estático canal cuatro (4) 167
9. Comportamiento estático canal cinco (5) 170
10. Comportamiento dinámico del sistema 173
11. Diagramas esquemáticos 177
12. Diagramas de circuitos impresos 181
13. Esquema mecánico del sistema 189
APÉNDICES
1. Glosario '- , 192
2. Tabla de calibración del termistor patrón 499 203
3. Especificaciones técnicas de los elementos
utilizados 206
4. Listado de programas 227

INTRODUCCIÓN
El avance científico-tecnológico en el que se encuentra inmerso
la universidad ecuatoriana, ha incentivado la realización de
proyectos de investigación que ayuden o colaboren con el
desarrollo de la humanidad.
La Escuela Politécnica Nacional, con el afán de colaborar con
dicho avance? ha creado el Instituto de Ciencias Nucleares
donde se ha instalado un acelerador de electrones para realizar
pruebas radiactivas sobre materiales orgánicos e inorgánicos.
La dosis de ionización de un acelerador de electrones se mide
utilizando calorímetros de agua los cuales generan un
incremento de temperatura cuando sobre ellos incide un haz de
electrones.
El objetivo del presente trabajo es desarrollar un sistema, para
me dir el incremen to de tempezca tura con gran preci si ón y
resolución de centésimas de gibado centígx^ado.
Para medir la temperatura se utilizan sensores tipo
termistores., los cuales deben ser calibrados, es decir;,
determinar la ecuación matemática que simule el comportamiento
de la curva característica, del sensor. El "Sistema digital
para calibración de termistores" llamado CALTHER permite además
encontrar dichos coeficientes midiendo la resistencia que

12
presenta el elemento sensor a una temperatura específica y
constante. Esta medición prácticamente se realiza en tiempo
real.
El sistema CALTHER tiene seis canales analógicos de entibada en
1 os cuales se conectan 1 os termistores, uno de el 1 os será el
termi stor &a trón. Útil isa como dispositivo de control de los
diferentes circuitos del sistema el microprooesador INTEL 8751,
gue a la ves establece la comunicación del sistema con un
computador personal IBM o compatible en el cual se desarrolló
el software necesario para el procesamiento de datos generados
por el sistema CALTHER.
El software desarrollado permitirá la utilización del sistema
por cualquier persona que tenga conocimientos básicos sobre los
sensores de temperatura tipo termistor.
El presente trabajo consta de 5 capítulos, varios anexos y
apéndices para que el usuario pueda tener acceso a información
sobre el desarrollo, uso y mantenimiento del sistema.
En el primer capitulo se desarrolla un estudio teórico sobre
los termistores? técnicas de calibración y métodos utilizados
para la adquisición de datos en un computador personal.
En el segundo capitulo se detalla los aspectos fundamentales
tomados en cuenta para la construcción del equipo. Se explica
el diseño del cii^cuito acondicionador de señal, del sistema de
adquisición de d&tos y se presentan los diagramas del diseño
en el anexo 12. El diseño de las fuentes de polaicización se

2.11
presen -tan en el anexo 1.
En el tercer capítulo se detalla el diseño de los programas
tanto del microcontrolador como de los desarrollados para el
computador personal.
En el cuarto capítulo se presentan los resultados de las
pruebas de laboratorio y aplicaciones realizadas. Se incluye un
manual de operación y mantenimiento y además se realista un
estudio del comportamiento estático y dinámico del sistema.
Finalmente en el quito capitulo se insumen las conclusiones y
recomendaciones recopiladas a lo largo del presente tx*abajo.
Adicionamente se presentan varios anexos y apéndices con tablas
de valores de las pruebas realizadas, hojas de especificaciones
técnicas de varios elementos utilizados en el eouipo y un
glosario de palabras técnicas.
El sistema de medición idealizado en esta tesis es de aplicación
práctica en nuestro medio, co.ractez>istica importante? toda ves
que la uní ver si dad ecua tobiana debe general"* sus propi os
recursos y sistemas Que puedan coadyuvar a la consecución de
los fines de la educación superior técnica y a su desarrollo
dentro del convivir nacional.

CAPITULO 1
GENERALIDADES
1.1 EL TERMISTOR COMO SENSOR DE TEMPERATURA.
La medida de -temperatura constituye lina, de las mediciones más
comunes e importantes gue se efectúan en los procesos
industriales. Las limitaciones de los sistemas de medida
quedan definidas por la precisión, velocidad de respuesta,
distancia entre el elemento de medida y el aparato receptor,
tipo de instrumento indicador, registrador o controlador
necesarios.
1.1.1 SENSORES DE TEMPERATURA UTILIZANDO SEMICONDUCTORES.
Los sensores de temperatura utilizan diversos fenómenos que son
influenciados por la temperatura, uno de ellos es la variación
de resistencia de un semiconductor.
Dentro de este tipo se sensores podemos mencionar:
a) Termistores.
Son los sensores de temperatura con semiconductores utilizados
más ampliamente. Su rango de medida se encuentra entre -50 y
300 °C. Se utilizan semiconductores obtenidos de mezclas de
sulfuros, seleniuros u óxidos de níquel, manganeso, cobalto,
cobre, hierro y uranio.
Se realizan formando pequeñas perlas o varillas que son
posteriormente encapsuladas. Los termistores se caracterizan
por una elevada resistividad y un alto coeficiente de
temperatura de resistencia negativa.
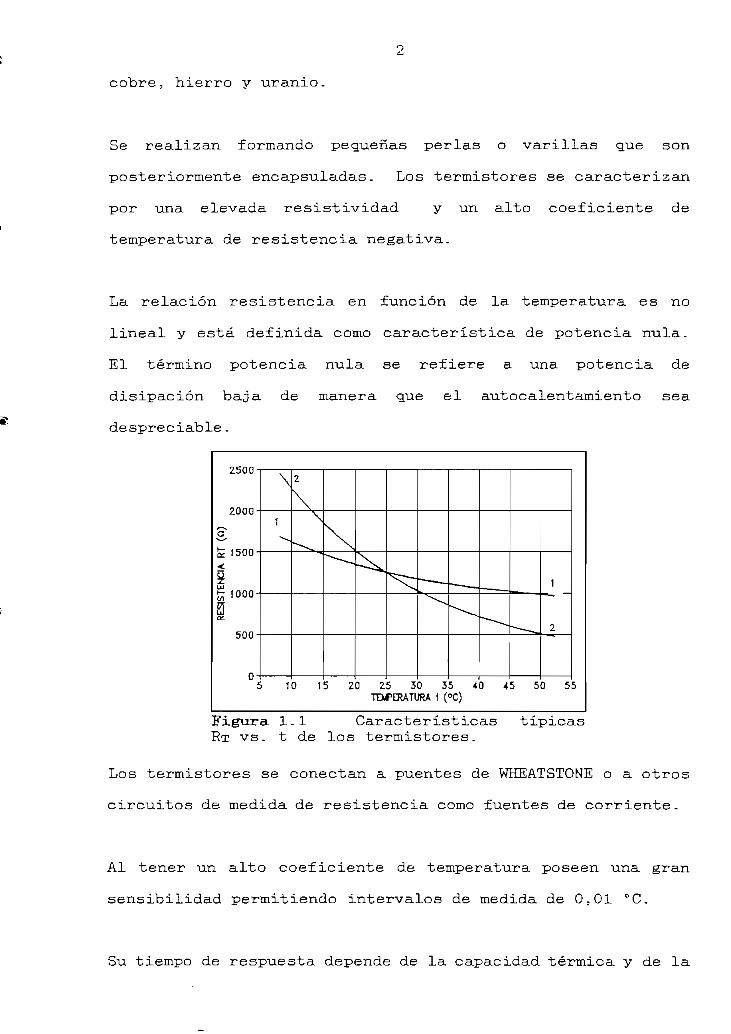
La relación resistencia en función de la temperatura es no
lineal y está definida como característica de potencia nula.
El término potencia nula se refiere a una potencia de
disipación baja de manera que el autocalent amiento sea
despreciable,
2500
10 15 20 25 30 35 40 45 50 55TBtfEKATURA t (°C)
Figura 1.1 Características típicasRT vs. t de los termistores.
Los termistores se conectan a puentes de WHEATSTONE o a otros
circuitos de medida de resistencia como fuentes de corriente.
Al tener un alto coeficiente de temperatura poseen una gran
sensibilidad permitiendo intervalos de medida de 0,01 °C,
Su tiempo de respuesta depende de la capacidad térmica y de la
3
masa del termistor variando de fracciones de segundo a minutos.
La distancia entre el termistor y el instrumento de medida
puede ser considerable siempre que el elemento posea una alta
resistencia comparada con la de los cables de unión.
La corriente que circula por el termistor a través del circuito
de medida debe ser baja (menor de 100 uA) para garantizar que
la variación de resistencia del elemento sea debida
exclusivamente a los cambios de temperatura externa y no
causada por el autocalentamiento por la disipación I2R.
b) Sensores de temperatura, de germanio,
El elemento sensor consiste en un cristal de germanio dopado,
su utilización es exclusiva para bajas temperaturas alrededor
de -250 °O_
La característica resistencia en función de la temperatura es
no lineal similar a los termietores.
Estos sensores se utilizan cuando se requieren medidas con
elevada repetibilidad a temperaturas por debajo del punto de
ebullición del helio (-268,9 °C. ) hasta alrededor del punto
ebullición del hidrógeno (-252,87 °C).
c) Diodo de aLrseniuro de galio (GaAs).
Se utiliza principalmente para medir temperaturas en un rango
1 HARRY N. NORTON, "Sensores y Analizadores", 1984,pag. 357 - 359.

entre -269 °C y 30 °C.
La tensión de un diodo de GaAs a corriente constante aumenta
prácticamente en forma lineal al disminuir la temperatura. La
corriente de excitación debe controlarse dentro de una
tolerancia pequeñas y la resistencia de carga asociada debe ser
suficientemente elevada dado que la impedancia de salida de un
diodo de GaAs es relativamente alta (de 15 a 20KQ).
d) Cristales de silicio.
Los cristales de silicio dopados por impurezas de fósforo se
utilizan en un rango medio y bajo de temperatura. La
conducción eléctrica tiene lugar en la superficie de la capa
difundida.
La característica resistencia en función de la temperatura
muestra una pendiente lineal y positiva por encima de -50 °C,
mientras que por debajo de esta temperatura la pendiente es
fuertemente negativa.
Los cristales de silicio se utilizan para medir la temperatura
del hidrógeno líquido.
1.1.2 TERMINOLOGÍA DEL TERMISTOR.
a) Definición.
Termistor es un resistor sensible a la temperatura cuya función
primaria es cambiar la resistencia con una variación de
temperatura en el cuerpo.

5
b) Temperatura de referencia eetandard.
Es la temperatura con la cual se relaciona la resistencia de
potencia nula, tipicamente (25 °C) .
c) Resistencia de potencia nula (Ro:)-
Es el valor de resistencia medida a una temperatura especifica
con una disipación de potencia suficientemente baja.
d) Característica proporcional de resistencia.
Identifica la razón entre la resistencia de potencia nula y la
resistencia medida a 25 °C.
e) Coeficiente de temperatura (oT).
Es la relación de una temperatura especifica de la velocidad de
cambio de la resistencia de potencia nula con la temperatura
del termistor. Este coeficiente se relaciona directamente con
la sensibilidad y esta expresado en Q/°C o en fracciones de
grado centígrado.
-, dRT
U
(1.1)
f) Coeficiente de temperatura negativa (NTC) .
Un termistor NTC es aquel en el cual la resistencia de potencia
nula decrece con un incremento de temperatura.
g) Coeficiente temperatura positivo (PTC).
Un termistor PTC es aquel en el cual la resistencia de potencia
nula aumenta con un incremento de temperatura.

6
n) Temperatura de operación máxima,
Es la máxima temperatura a la cual el termistor va a operar por
un extenso período de tiempo manteniendo estables sus
características. Esta temperatura es el resultado del
calentamiento interno, externo o ambos, y no debe exceder de su
máximo valor especificado.
i) Potencia máxima de disipación.
Es la máxima potencia que un termistor va a disipar por un
extenso período de tiempo manteniendo estables sus
características.
j ) Constante de disipación.
Es la relación (en mW/°C) a una temperatura especificada, del
cambio de potencia de disipación sobre el cambio de
temperatura.
k) Conetante de tiempo térmico.
Es el tiempo requerido por un termistor para cambiar 63,2% de
la diferencia total entre la temperatura inicial y final del
cuerpo.
1) Característica resistencia vs. temperatura.
Es la relación entre la resistencia de potencia nula y la
temperatura del cuerpo.
m) Característica temperatura vs. potencia.
Es la relación a una temperatura específica entre la
temperatura del termistor y la potencia aplicada.

7
n) Característica corriente vs_ tiempo,
Es la relación a una temperatura ambiente especifica entre la
corriente a través del termistor y el tiempo.
1.1.3 UTILIZACIÓN DE LOS TERMISTOKES.
Los termistores existen en diversas configuraciones y tamaños
típicamente muy pequeños, se pueden utilizar en su forma básica
o instalados en un conjunto tipo sonda.
Los termistores a más de utilizarse para medir la temperatura,
también son usados para determinadas funciones electrónicas
como interrupción, supresión de corrientes, retardos; medida de
magnitudes como temperatura, potencia, nivel de liquido, punto
de rocío, etc.
Figura 1.2 Termistores tipo perla.
El termistor tipo perla es la configuración más común para
medir la temperatura; en su fabricación se •utilizan polvos de
óxidos de metales con un. material fijador y luego son
encapsulados. Las uniones con los hilos de conexión se
realizan durante el proceso de formación, las perlas pueden

estar revestidas de cristal, hechas en parte en una sonda
pequeña de cristal o fijadas dentro de un tubo de cristal o
encapsulado.
La figura 1.2 muestra unos diseños de termistores tipo perla
en trabajos de investigación crítica utilizados por la
industria biomédica2.
Los termistores cuando están unidos a una plancha metálica se
pueden utilizar como sondas de temperatura de superficie. Las
sondas de cristal pequeñas o las perlas se utilizan en las
sondas de temperatura de gas. Cuando se encuentran
encapsuladas completamente en una vaina metálica se utiliza en
sondas de inmersión para la medida de temperatura de líquidos.
1.1.3.1 CALORÍMETROS.
A continuación se realiza la descripción de un tipo específico
de calorímetro utilizado por el Instituto de Ciencias Nucleares
de la Escuela Politécnica Nacional Quito-Ecuador.
Esta formado esencialmente por el acelerador de electrones y el
calorímetro propiamente dicho que utiliza como medio de
absorción al agua.
a) Acelerador de electrones.
La irradiación de electrones sobre el cuerpo del calorímetro
HARRY N. NORTON, "Sensores y Analizadores", 1984,Fig. 4-25. Termistores de alta flabilidad (USA).(cortesía de Yellow Springs Instrument Co. , Inc.)
son ejecutadas con un rayo de electrones de baja energía 3.,
con una corriente entre 5 y 30 mA? un ancho de 100 cm y una
frecuencia de 200Hz. El acelerador está provisto de un
conductor de velocidad variable, para transmitir al calorímetro
un rayo de luz. La distancia entre el acelerador y el
conductor es aproximadamente de 10 cm.
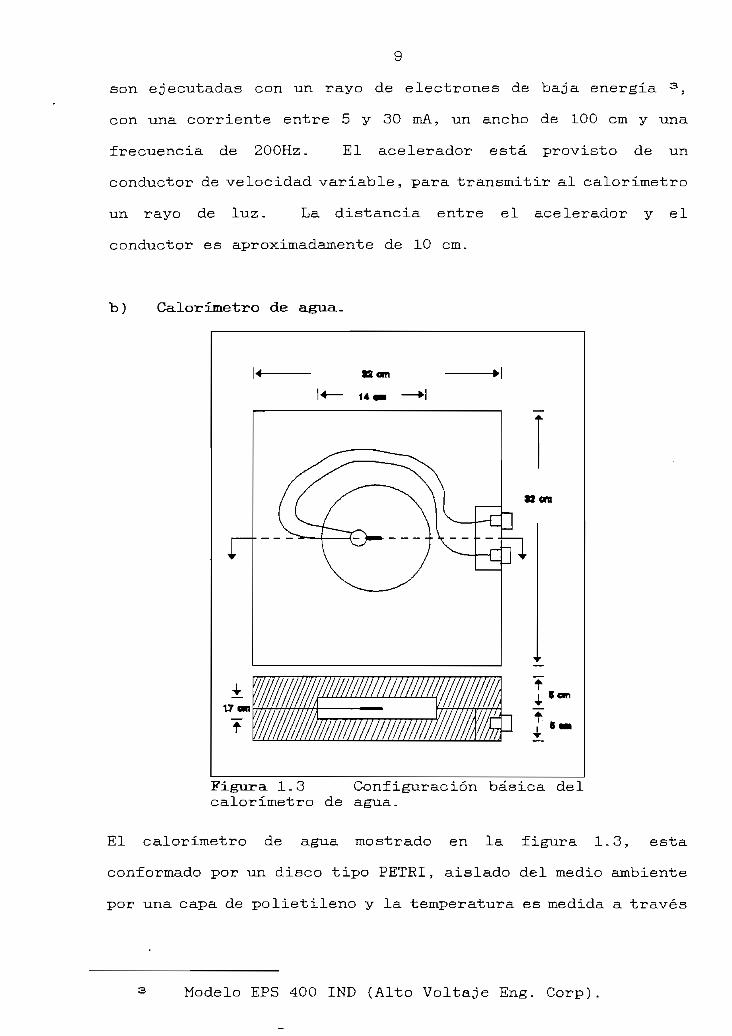
b) Calorímetro de agua.
Figura 1 _ 3 Configuración básica delcalorímetro de agua.
El calorímetro de agua mostrado en la figura 1.3, esta
conformado por un disco tipo PETRI, aislado del medio ambiente
por una capa de polietileno y la temperatura es medida a través
Modelo EPS 400 IND (Alto Voltaje Eng. Corp).

10
de un •tezmis'tor-*. de vidrio calibrado y encapsulado.
El calorímetro es normalmente irradiado por un haz de
electrones generado por un acelerador de electrones y la
temperatura es medida antes y después de la irradiación. A
pesar de su simple apariencia el calorímetro de agua es algo
complejo, debido a sus varios componentes que deben estar en
equilibrio térmico.
El calorímetro presenta las siguientes dimensiones: diámetro
14 cm, espesor 1.7 cm, masa 260 g.
Está envuelto en un bloque de polietileno de 32 x 32 x 10 cm.
El grosor de los platos es de 3 mm y densidad de 1 g/cm3,
suficiente para absorber totalmente los electrones irradiados.
Un espacio de aire de mas o menos 3 mm entre el cuerpo y el
bloque de polietileno disminuye las pérdidas de calor hacia el
medio ambiente, una membrana delgada de polietileno extendida
al tope del calorímetro así mantiene una capa de aire
encerrado, disminuyendo los efectos del aire comprimido que es
utilizado por la ventana de enfriamiento del acelerador de
electrones.
El calorímetro absorbe totalmente los 0.4 MeV de energía
impartida durante la irradiación la cual es distribuida
desigualmente, sin embargo la temperatura llega a ser
ecualisada a través del calorímetro dentro de un corto período
P32A180 (Corporación de Ingeniería Victoria)

12
medición.
1.1.4 ECUACIONES DE LOS TERMISTOKES.
La variación de resistencia que presentan los termistores en
función de los cambios de temperatura, se expresa mediante la
siguiente ecuación:
RTm RTo e
donde :
RT Resistencia de potencia nula medida a la temperatura
absoluta0 .
RTO Resistencia de potencia nula medida a la temperatura
absoluta To, usualmente 298,15 °K (25 °C) .
£ Constante que depende del material del termistor .
Los valores típicos de |3 se encuentran entre 3000 y 4500 °K,
determinados a partir de medidas de resistencia en el punto de
hielo y una temperatura por encima de la temperatura
ambiental, usualmente 50 °C. Los valores de resistencia de
potencia nula a 25 °C pueden estar entre 500 Q y 10 MQ.
La ecuación 1 . 2 es válida solamente dentro de un rango de
temperatura limitado, puesto que la constante del material (£)
sube con temperaturas más altas. Como mínimo se requiere dos
puntos de calibración o un punto de calibración si se
especifica el valor de ]3 .
°T(°K) - t (°C) 4- 273.15

13
Cuando se tienen tres puntos de calibración se suele utilizar
las siguientes ecuaciones:
I v(Ao 4- (_£) + (—))
T 3RT - e J (1.3)
1 3— - a. 0 + a1 In R% +• #3 (InRrp) (1.4)
donde:
Ao. Ai, AB, ao, ai y as Constantes.
El error introducido por esta ecuación es aceptable para
temperaturas bajo los 100 °C.
Cuando se tienen cuatro puntos de calibración o más se puede
utilizar las siguientes ecuaciones:
A-\ -"M(AO + (_i) + (_£) +. (_£))T1 O ^-¿ m¿« /rr'-J
-ff y m e ( 1 - 5 )
1 2 3
T °
El máximo error de 0.0015 °C fue encontrado para un termistor
típico operando dentro del rango de O a 100 °C.
Según RISO6, la ecuación 1.2 la expresan en grados centígrados
de la siguiente forma:
6 RISO NATIONAL LABORATORY, laboratorio que calibró eltermistor No. 499, utilizado como patrón para elsistema "CALTHER".

14
- 273.15 (1-7)(lnRT - A}
A - In RTn - — (1.8)-10 To
donde:
A, B Constantes.
Con el objeto de minimizar los errores, disminuir la precisión
y aumentar la sensibilidad para un punto especifico de
temperatura, la ecuación 1.7 se presenta de la siguiente forma:
t - - - - - 273.15 + G + ¿
donde :
A, B , Ci, Cs Constantes ,
Para encontrar las constantes de la ecuación 1.9 se requieren
como mínimo cuatro puntos de calibración.
1.2 TÉCNICAS DE CALIBRACIÓN.
Cualquier sistema que se utilice para medir, transmitir y/o
controlar las variables que intervienen en un proceso, presenta
una relación entre la variable de entrada y la de salida del
equipo. Esta relación puede encontrarse en las partes internas
del equipo en particular cuando este es complejo y compuesto
por varias etapas. Una parte importante constituyen los

15
dispositivos de conversión de señales que pasan tina variable de
entrada a una o varias de las siguientes funciones de salida:
- indicación de la variable de entrada.
- lectura de un registro.
- transmisión de la variable de entrada como señal neumática
o señal eléctrica.
Los instrumentos determinan en general valores inexactos en la
salida que se apartan en mayor o menor grado del valor
verdadero de la variable de entrada. El error es universal e
inevitable aunque la medición sea muy elaborada o aunque se
efectúe un gran número de veces.
1.2.1 CARACTERÍSTICAS DE ACTUACIÓN.
Para todo transductor existe una relación entre la salida y la
magnitud a medir. Si el transductor estuviera diseñado y
fabricado de materiales ideales, la salida de este transductor
ideal indicarla siempre el valor real de la variable medida, en
este caso la salida seguiría exactamente la curva teórica que
especifica la relación entre la salida y la magnitud aplicada,
definiendo asi el rango del transductor. Esta relación puede
establecerse en forma de una tabla de valores, gráfico o
ecuación matemática.
Las características de actuación de los transductores definen
las bases de calibración de los mismos, entre las más
importantes se pueden mencionar:

16
a) Características estáticas.
Describen la actuación del transductor bajo ciertas condiciones
ambientales, con cambios muy lentos de la magnitud a medir y en
ausencia de perturbaciones, aunque existen ciertos desacuerdos
acerca de qué condiciones constituyen las condiciones
ambientales7.
"b) Características dinámicas.
Relacionan la respuesta en el tiempo de un transductor con las
variaciones de la magnitud a medir.
c) Características del medio ambiente.
Relacionan la actuación de un transductor antes de su
exposición (características ambientales no operativas) o
durante la exposición (características ambientales operativas)
a unas condiciones externas como presión, vibraciones, etc_
d) Características de flabilidad.
Relacionan la esperanza de vida del transductor de temperatura
con una serie de sucesos que pueden presentarse por su
utilización inadecuada en un sistema que opera conjuntamente.
1.2.2 COMPORTAMIENTO ESTÁTICO.
La relación entre la salida y la variable a medir de un
transductor real, está afectada.por el.comportamiento.no ideal
Generalmente se establecen las siguientes condicionesambientales: una temperatura de 25 ± 10°C a un humedadrelativa del 90% o menos, y una presión barométricaentre 880 y 1080 mbar.

17
del mismo, que ocasiona que el valor de la magnitud indicada
esté desviado respecto del valor real. La diferencia
algebraica entre el valor indicado y el real es el error del
transductor.
La precisión se define como la relación entre el error y la
salida a fondo de escala, depende directamente del error y
establece la tolerancia de medida del transductor, con ello se
pretende tener un margen de seguridad para compensar los
siguientes efectos:
— Diferencias de apreciación de la personas que efectúan la
calibración
- Diferentes precisiones de los instrumentos de medida
utilizados
- Posibles alteraciones debidas al desplazamiento del
instrumento de un punto a otro
- Efectos ambientales y de envejecimiento.
La manera más simple de considerar los errores de un
transductor es establecer las desviaciones máximas respecto de
una linea o curva de referencia especificada que define la
relación entre la salida y la magnitud a medir (banda de
error). La existencia de errores individuales como la no
linealidad, no repetibilidad, histéresis, desplazamiento del
cero y desplazamiento de la sensibilidad deben ser analizados
aparte, el efecto de estos errores en el comportamiento del
transductor y los datos obtenidos permiten corregir los datos
finales y aumentar la precisión de los mismos.

18
Las características del error se determinan mediante
calibración. Este término implica -asnalmente una calibración,
estática, que corresponde al análisis de sus características
determinadas estáticamente. Una calibración es un "test"
durante el cual se aplica una magnitud de valor conocido a un
transductor y se registra la lectura de la salida
correspondiente- Este registro resultante se lo realiza en
forma de tabla (registro de calibración) o en forma gráfica
(curva de calibración). Nótese que también puede obtenerse una
curva de calibración a partir de un registro de calibración, ya
sea manualmente o con la ayuda de un computador. La
realización de este "test" sobre el rango completo del
transductor, una vez con magnitudes crecientes y otra con
magnitudes decrecientes se denomina ciclo de calibración.
La histérisis es la máxima diferencia en la salida., para un
valor determinado de la magnitud a medir interior al rango
cuando este valor es alcanzado mediante el aumento y
disminución de la magnitud. La histéresis vista en una porción
del rango es menor que la histéresis total.
La repetibilidad es la habilidad de un transductor para
reproducir iguales lecturas de salida cuando se aplica el mismo
valor de la magnitud a la entrada, bajo las mismas condiciones.
La. linealidad define el comportamiento diferencial, .de. la,,curva:
de calibración respecto a una linea recta' especificada. La
linealidad va acompañada de la especificación de a qué tipo de
línea recta se refiere (ver apéndice 3).
19
La resolución y el umbral son dos ^descripciones del
comportamiento del transductor. Cuando la magnitud varia
continuamente dentro del rango, la salida cambia con pequeños
escalones, la magnitud de los cambios en escalón de la salida
cuando la magnitud a medir varia continuamente dentro del rango
es la resolución del transductor_ La magnitud o el mayor de
todos los escalones observados es la resolución máxima. La
resolución de un transductor de salida digital viene dada por
el número de bits de la palabra de datos, o en el caso de los
transductores de salida digital increméntales por el número de
indicaciones de nivel alto obtenido por unidad de longitud.
Cuando los escalones no son medibles en la salida de un
transductor se dice que tiene resolución continua,
Para ocasionar un cambio en la salida de cualquier transductor
se requiere un cambio en la magnitud a medir, en algunos
transductores este cambio mínimo no es medible, en otros es
medible, pero es despreciado para una aplicación dada o es
significativo sólo en el limite inferior del rango. El cambio
más pequeño en la magnitud a medir necesario para conseguir un
cambio medible en la salida es el umbral del transductor.
La sensibilidad es la relación del cambio en la salida con el
cambio del valor de la magnitud a medir y establece la
pendiente de la curva de calibración.
La banda de error como se indicó anteriormente es la banda de
desviaciones máximas de los valores de salida respecto a una
linea o curva de referencia; como estas desviaciones pueden ser

21
encontrar programas que dibujan ima curva en base a un
polinomio de orden dado. En algunas aplicaciones la precisión
del transductor tiene importancia únicamente en una porción
limitada del rango pudiéndose sacrificar la precisión en otras
porciones. Para estos casos puede utilizarse una banda de error
estático a escalones.
El cambio ocurrido a la salida de un transductor en un periodo
de tiempo especificado cuando la magnitud que se mide se
mantiene constante en un valor dentro del rango de medida
manteniendo las condiciones ambientales constantes, se dice que
el transductor mantiene estabilidad temporal a la salida. Si se
genera un cambio a la salida correspondiente a la magnitud cero
dentro de un periodo de tiempo especificado, se llama
desplazamiento de cero y se carácter isa por ser un
desplazamiento paralelo a la curva de calibración. Un cambio en
la pendiente de la curva de calibración genera un cambio en la
sensibilidad. Estas características son dependientes del tiempo
y pueden ser determinadas mediante una serie de calibraciones
estáticas o con calibraciones estáticas repetidas después de un
periodo de tiempo.
1.2.3 (COMPORTAMIENTO DINÁMICO.
Cuando se utiliza un transductor en medidas donde la magnitud
varia de. manera rápida o en donde pueden existir -cambios de la
misma en escalón, se deben establecer las características
dinámicas del transductor. Estas pueden estar definidas y
determinadas en términos de la respuesta de frecuencia, tiempos

22
de respuesta y amortiguamiento8.
La respuesta frecuencial es el cambio observado con la
frecuencia de la relación entre la amplitud de salida y la
amplitud de la magnitud dentro de un rango definido de
frecuencias. Es también el cambio con la frecuencia de la
diferencia de fase entre la variable medida, especificada
usualmente en dB.
Al especificar las características de respuesta de un sistema
a una entrada escalón unitario, es habitual especificar el
tiempo que tarda la respuesta en alcanzar por primera vez la
mitad del valor final, denominado tiempo de retardo; el tiempo
que se demora la respuesta en crecer de O al 100%, del 5 al 95%
o del 10 al 90% de su valor final, se llama tiempo de
crecimiento y el tiempo de establecimiento es el requerido por
la curva de respuesta para alcanzar y mantenerse dentro del 5%
o 2% alrededor del valor final. Se relaciona el tiempo de
crecimiento con la constante de tiempo más grande del sistema.
1.2.4 ERRORES DE CALIBRACIÓN.
Un instrumento, se considera que está bien calibrado cuando en
todos los puntos de su campo de medida, la diferencia entre el
valor real de la variable y el valor indicado o registrado o
transmitido, está comprendida entre los limites determinados
por la precisión del instrumento.
Estos análisis se han normalizado por sociedadesprofesionales y por laboratorios gubernamentales, comoen Estados Unidos el National Bureaumof Standards.
23
En condiciones de funcionamiento estático, las desviaciones
respecto a la relación lineal indicada, dan lugar a los errores
de calibración de los instrumentos, suponiendo que estas
desviaciones no superan la exactitud dada por el fabricante,
consideraríamos el instrumento calibrado aunque no coincidiera
exactamente la curva variable vs. lectura con la recta ideal.
Las desviaciones de la curva variable vs. valor real de un
instrumento típico con relación a la recta ideal representa los
errores de medida del aparato. Esta curva puede descomponerse
en tres que representan individualmente los tres tipos de
errores que pueden hallarse en forma aislada o combinada en los
instrumentos.
Cuando todas las lecturas están desplazadas un mismo valor
positivo o negativo con relación a la recta representativa del
instrumento, se conoce como error de cero, el punto de partida
de la recta representativa cambia sin que varíe la inclinación
o la forma de la curva.
Cuando todas las lecturas aumentan o disminuyen progresivamente
con relación a la recta representativa, en la que el punto base
no cambia, se conoce como error de multiplicación.
Si la curva real coincide con los puntos O y 100% de la recta
representativa, pero se aparta de la misma en los restantes, se
dice que existe un error de singularidad, la máxima desviación
suele estar en la mitad de la escala. Para calibrar un
instrumento conviene reducir al mínimo el error de angularidad.
24
En el caso de sistemas digitales no se considera este tipo de
error.
Con el objeto de reducir al mínimo los errores de calibración
que puedan presentar los sistemas de medida, estos presentan
potenciómetros o tornillos de calibración que varían la
magnitud de los errores antes mencionados, y asi conseguir la
exactitud deseada o requerida.
1.3 TÉCNICAS Y SISTEMAS DE ADQUISICIÓN DE DATOS.
Históricamente la adquisición de datos con fines científicos,
fue implementada en grandes mainframes o sistemas de
microcomputadoras. Dichas máquinas trabaj aban con 16 bits y
corrían en tiempo compartido o multitarea. Su complejidad y
alto precio limitaba su utilización y sus aplicaciones.
Trabajos pequeños eran procesados en forma manual, o en el
mejor de los casos se empleaban simples técnicas electrónicas,
sin embargo no se justificaba la inversión económica y el
trabajo humano requerido para la automatización de tales
procesos.
En la década de los años sesenta, se disponía en el mercado de
una variedad de dispositivos neumáticos y electrónicos para
supervisión y control de procesos, desde entonces se ha
producido un profundo cambio con la introducción de los
computadores híbridos en dichos procesos.

25
Desde la segunda mitad de los años setenta con el impacto de
los microprocesadores y el consecuente aparecimiento de los
computadores personales, se desarrollaron sistemas
microprocesados, los cuales toman datos de las variables del
proceso prácticamente en tiempo real, facilitando las acciones
de control, disminuyendo los errores y agilitando el
procesamiento de señales _
Grandes paneles de instrumentos, perillas., interruptores, han
sido substituidos por teclados y pantallas. El desarrollo y
supervisión de las más variadas tareas son realizadas con la
ayuda de los computadores los cuales permiten una mayor
capacidad para implementar programas para el monitoreo y
operación de un sistema por complicado que éste sea.
1.3.1 SISTEMAS DE ADQUISICIÓN DE DATOS.
Simplemente expuesto, "adquisición de datos" es la colección de
información que describe una situación; desde el punto de vista
del control automático, los datos mencionados describen la
dinámica de un sistema o proceso.
Los sistemas de tiempo real se caracterizan por la habilidad de
ejecutar la adquisición de datos en un intervalo de tiempo
imperceptible. La velocidad a la que el sistema debe responder
depende de los requerimientos y limitaciones del sistema
físico.
Los microcontroladores fueron utilizados como sistemas de

26
adquisición de datos debido a la necesidad de realizar un
control digital en tiempo real sobre el proceso. Gracias a las
técnicas de integración;, se puede tener prácticamente un
microcomputador en una sola pastilla donde se integra la unidad
de procesamiento (CPU) , la memoria y los dispositivos de
entrada y salida, dando como resultado un elemento muy versátil
y preciso. Con el adecuado software puede reemplazar fácilmente
a circuitos digitales de gran tamaño, obteniéndose un equipo de
alta conflabilidad y bajo costo.
La función de los microprocesadores en los procesos, involucra
además tareas como el monitoreo, procesamiento de señales,
activado de alarmas, control de interrupciones, etc.
Si el proceso a controlar involucra un alto número de variables
y subprocesos será necesario implementar un control jerárquico,
donde la unidad de control principal basada en un sistema
digital computarizado dirigirá el trabajo del microprocesador,
en este caso la comunicación con el computador se realiza
utilizando algún formato estándar de comunicaciones
permitiendo el envío y recepción de información.
En las líneas anteriores se han mencionado las ventajas que
tiene el uso de los microprocesadores, pero no hay que perder
de vista algunas de sus limitaciones; así por ejemplo: longitud
de la palabra digital de datos utilizada en la comunicación y
tiempos de retardo que se producen al procesar la información.
Sin embargo, estos aspectos están siendo superados ya que los
fabricantes de los microcontroladores ya están introduciendo en
27
el mercado procesadores más rápidos., de menor consumo de
potencia, de palabras digitales de mayor longitud y dándoles
características nuevas, como un intérprete BASIC y conversores
A/D y D/A incorporados al microprocesador.
Un sistema de adquisición, presenta las variables físicas
tomadas de un proceso en formatos entendibles para un
computador digital, para que este procese y genere códigos de
control que actúen sobre el proceso. Internamente a la unidad
de adquisición, existen una variedad de componentes que
facilitan la operación de conversión; tales como conversores
análogo/digital y digital/análogo, multiplexores, muestreadores
retenedores, amplificadores, contadores, temporizadores y
algunos otros de funciones especializadas.
Una cualidad importante de un sistema de adquisición de datos
es brindar juntas todas estas sofisticadas funciones que un
proceso requiere en un solo sistema integrado y compatible.
Con el software adecuado, el usuario puede utilizar toda esta
tecnología sin estar familiarizado con los detalles de
construcción internos del sistema.
1.3.2 TÉCNICAS DE ADQUISICIÓN DE DATOS.
Un sistema de adquisión de datos procesa señales discretas de
información que representan variables medidas en un proceso.
Las señales eléctricas tales como voltajes y corrientes son las
más comunes.
28
Las cantidades discretas de información podrían desprenderse de
la naturaleza del proceso o podrían ser cuantificadas en el
caso de un proceso continuo.
Muchos sistemas físicos pueden ser descritos matemáticamente
por medio de ecuaciones diferenciales cuyas soluciones, como
funciones de tiempo, darán un comportamiento matemático del
proceso. Un computador análogo realiza una simulación directa
de un sistema físico. Cada sección de computador es el análogo
de alguna parte específica del proceso. Las variables en el
computador análogo están representadas por señales continuas
que varían con el tiempo y que por lo general son voltajes
eléctricos. De esta forma, las mediciones de voltajes análogos
pueden ser sustituidos por variables del proceso y se comportan
de la misma manera. El término señal análoga generalmente es
llamado señal continua debido a que el computador análogo
maneja variables continuas.
Un sistema de adquisición de datos que basa su funcionamiento
en un microprocesador, interactúa con el computador personal a
través de programas instalados tanto en el microcontrolador
como en el PC los cuales se encargan de operar correctamente
los conversores A/D y D/A, puertos paralelos para entrada y
salida digital, puerto serial para la transmisión bidireccional
de datos que se obtienen de las diferentes conversiones y
algoritmos implementados.
A través de la comunicación serial el operador puede
seleccionar uno de los módulos implementados en el

29
microprocesador y junto con el software respectivo en el PC,
puede realizar acciones de control sobre el proceso,
En la actualidad el desarrollo del software a ser instalado en
un microprocesador ya no es un misterio, el programador tiene
acceso a ensambladores, simuladores;, intérpretes,
programadores; en fin una serie de ayudas que con el computador
personal permiten depurar los programas antes de su
implantación final.

CAPITULO 2
REQUERIMIENTOS Y DISERO DEL HARDWARE
2.1 ESPECIFICACIONES INICIALES.
El Sistema, digital para calibración de tennistores CALTHER,, se
diseñó y construyó para la calibración de termistores
encapsulados de vidrio tipo P32A1801, <jue se emplean en
calorímetros para medir energía en materiales y calibración de
la respuesta de irradiación de dosímetros por aceleradores
industriales de baja energía de electrones, que utiliza el
Instituto de Ciencias Nucleares de la Escuela Politécnica
Nacional.
En general el sistema CALTHER puede ser utilizado para calibrar
cualquier sensor de temperatura tipo resistivo sensible a una
corriente de 10 uA en un rango de resistencia entre 500 y
2500 ohmios.
El funcionamiento del calorímetro se basa en tomar lecturas de
temperatura precisas antes y después de la irradiación de
electrones, por lo cual los termistores deben ser calibrados
con frecuencia para garantizar los resultados obtenidos.
A continuación se presenta un listado y diagrama del sistema
Corporación de Ingeniería Victoria.

31
CALTHER que va a ser diseñado con equipos adicionales que
requiere para su funcionamiento:
- Calorímetro.
- Circuito acondicionador de señal.
- Sistema de adquisición de datos.
- Display indicador -
- Fuente de polarización, transformadores y filtro de línea.
— Computador personal y periféricos.
2.1.1 DESCRIPCIÓN DEL SISTEMA CALTHER.
HAZ DE ELECTRONES
C 1 R C U I T OA C O N D 1 C I O N A D O R
DE 5 E N I A L
CACOND.8CH}
I T
LTROENEA
— *
TRANSFORMADORESDE VOLTAJE
FUENTE OEPDLAR17LAC I ONCFUEKTE , SCH3
CALTHER.SCH
Figura 2.1 Diagrama de bloques del sistema CALTHER.
La figura 2.1 contiene los siguientes bloques principales:
a) Calorímetro con termistor -
Es el elemento primario sobre el cual incide un haz de
electrones que genera un cambio térmico en el calorímetro. El
cambio de temperatura genera un cambio de resistencia en el
termistor, fenómeno físico en base al cual medimos la
temperatura.
32
b) Circuito acondicionador de señal.
La variación de resistencia del termistor al cambiar la
temperatura de su alrededor, es utilizada por esta etapa, en la
cual se acondiciona la señal a niveles normalizados de voltaje
entre O y 5 voltios.
Dentro de esta etapa se puede destacar las siguientes partes
importantes:
— Fuente de corriente de 10 uA
- Circuito amplificador de señal
Además, existen seis bloques de este tipo dentro del sistema
para cada canal activo.
c) Sistema de adquisición de datos.
Es una de las etapas más importantes del sistema, pues realiza
varias funciones importantes como:
- Selecciona el termistor a ser calibrado (canal activo)
Digitaliza la señal análoga que le entrega el circuito
acondicionador de señal
- Comunica el sistema con un computador personal a través de
su pórtico serial a una velocidad de 1200 bits/segundo,
siguiendo la norma internacional EIA RS-232C
- Genera las señales de control que seleccionan el canal de
medición.
d) Indicador del canal seleccionado.
Esta etapa está controlada directamente por el microcontrolador
del sistema de adquisición de datos, su única función es

33
mostrar el canal de medición seleccionado, para lo cual utiliza
un display de siete segmentos _
e) Fuentes de polarización.
Se ha diseñado tres tipos de fuentes reguladas (ver anexol):
- Fuente regulada de +5 V, 1.5 A.
Fuentes reguladas de 4-12 V y -12 V, 1 A c/u.
Estas fuentes se utilizan para polarizar los diferentes
circuitos digitales del sistema.
La alimentación del sistema la toma de la red de 110 V / 60 Hz,
además se coloca un filtro de protección y transformadores para
disminuir los niveles de voltaje.
f) Computador personal y periféricos,
Permite el envió de los códigos de selección del canal a medir
y la recepción de los bits correspondientes a la medición del
canal analógico activo. El software se lo desarrolló en
lenguaje C.
Las señales digitales que ingresan al computador son
almacenadas y procesadas en una base de datos, permitiendo
realizar consultas, cambios, inserciones, eliminaciones y
reportes en cualquier instante de tiempo. El software
correspondiente se desarrolló utilizando FOXPRO V2.0, que es un
administrador de bases de datos con gran capacidad de registros
de almacenamiento.

34
2.2 CIRCUITO ACONDICIONADOR DE SEtfAL.
En la figura 2_2 mues-fcra el diagrama de bloques que muestra los
componentes principales del circuito acondicionador de señal.
VOLTAJE DEREFERENC!A
r-57F UC NT E DECORR 1 ENTE
i
\.7
]
AMPL 1 r I CADORDE 3ENAL
I
SCNAL A N A L O G I C ADE S A L I D A C
SEÑAL A N A L Ó G I C ADE E N T R A D ACTEHM I STOFO
Figura 2.2. Acondicionamiento de señal.
Tomando en cuenta la sensibilidad de los termistores, las
corrientes a través de los mismos deben mantenerse muy baoas,
típicamente menores que 100 uA para asegurar una disipación de
potencia casi nula y por lo tanto un calentamiento
despreciable.
Una fuente de corriente tiene una resistencia interna muy
grande. Además produce una corriente de salida que no depende
de la resistencia de carga.
Para el análisis de la señal analógica generada por el
termistor, los niveles de tensión se deben amplificar a valores
normalÍ2ados entre O y 5 voltios, haciéndose necesaria la
implementación de una etapa de amplificación, de .señal que
cumpla este objetivo.
J
35
2.2.1 TIPOS DE FUENTE DE CORRIENTE.
A continuación se analizan varios tipos de fuente de corriente
resaltando sus ventajas y desventajas, para luego optimizar el
diseño de una fuente de corriente de 10 uA.
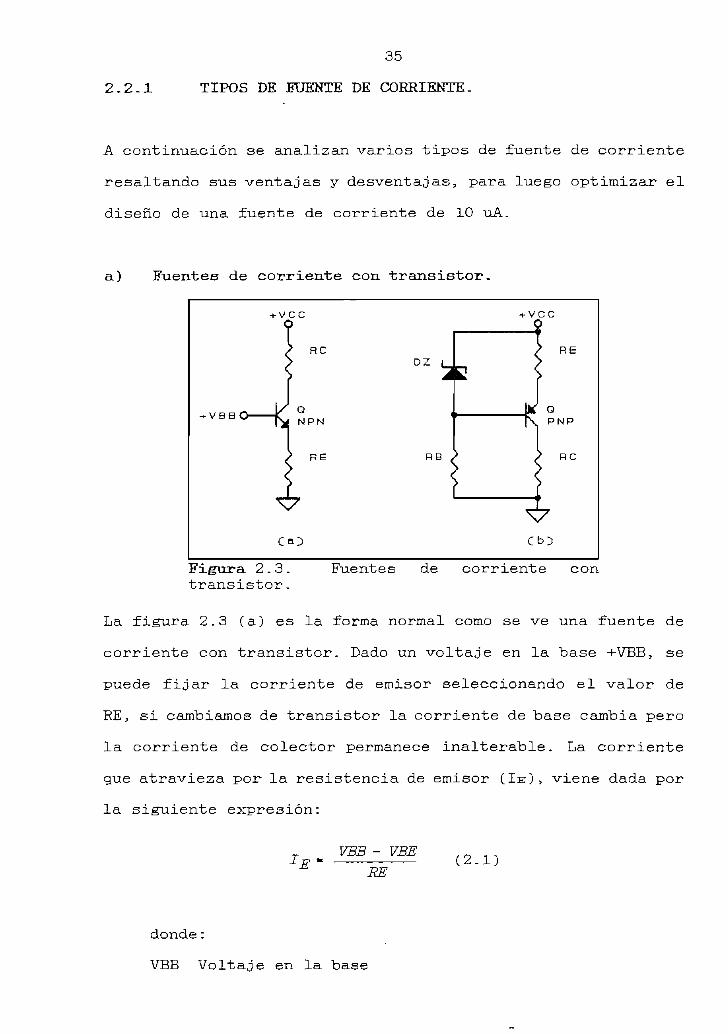
a) Fuentes de corriente con transistor.
VCC
RC
- V B B
+ VCC
REDZ
RE RB RC
Figura 2.3.transistor.
Fuentes de corriente con
La figura 2.3 (a) es la forma normal como se ve una fuente de
corriente con transistor. Dado un voltaje en la base -f-VBB, se
puede fijar la corriente de emisor seleccionando el valor de
RE, si cambiamos de transistor la corriente de base cambia pero
la corriente de colector permanece inalterable. La corriente
que atravieza por la resistencia de emisor (!E), viene dada por
la siguiente expresión:
I:VBB - VBE
PE(2.1)
donde:
VBB Voltaje en la base

36
VBE Voltaje base-emisor
RE Resistencia de emisor
Por ejemplo, si: VBB = 5V3 VBE = 0.7 V; entonces, para obtener
una corriente IE = 10 uA, se tiene que RE - 430 Kfí.
El voltaje aplicado en la resistencia del emisor (VE) , está
dado por:
VE «= VBB - VBE (2.2)
Como VBE es fijo y aproximadamente igual a 0.7 V, VE seguirá
las variaciones en VBB. Este fenómeno se denomina
autoelevación .
Para diseñar una fuente de corriente de precisión, el voltaje
aplicado en la base del transistor, debe ser también lo más
preciso posible. La figura 2.3 (b) muestra una fuente de
corriente que utiliza un diodo sener para fijar un voltaje
constante entre emisor y base del transistor, la corriente en
la resistencia de emisor ( IE) , esta dada por:
V - VBE(2.3)
RE
donde :
Vz Voltaje en el diodo zener
Por e j emplo , si : Vz = 5 . IV , VBE = O _ 7 V y se desea tener una
corriente de 10 pA, entonces RE debe ser aproximadamente igual
a 440 Kfí.

37
Debido a que la resistencia zener es muy pequeña, este circuito
proporciona una corriente muy estable en la resistencia de
colector. El transistor pnp invertido permite la conexión a
tierra por un lado de la resistencia de colector _
b) Fuente de corriente con amplificador operaciona.1.
•vcc
-vccQ
-VEEO
V«nt '
—OVsn
RL
RL
CtO
Figura 2.4por voltaje
Fuentes de corriente controladas
(a) Carga conectada a tierra(b) Carga flotante
Las ventajas que presentan los amplificadores operacionales
(alta impedancia de entrada, entradas de bajo ruido, ganancias
regulables, etc ) ., hacen de este dispositivo el elemento
ideal para el diseño de fuentes de corriente de precisión.
Dos tipos de fuente de corriente que utilizan amplificador
operacional;, constituyen las llamadas fuentes de corriente
controladas por voltaje, tal como se ilustra en la figura 2.4,
El caso (a) muestra una fuente de corriente controlada por
voltaje con carga conectada a tierra. Debido al efecto de
autoelevación, el voltaje en la entrada inversora es casi igual

38
al voltaje en la entrada no inversora (Vent), esto significa
que la corriente a través de la resistencia de
retroalimentación (!R), es aproximadamente igual a:
VCC - Vent .0 ..IR* - (2.4)^ R
donde :
VCC Voltaje de polarización positivo
R Resistencia de retroalimentación
Si Vent proviene de un diodo zener u otra fuente de voltaje
fijo, el transistor se comportará como una fuente de corriente
directa fija frente a la resistencia de carga (RL).
Existe un limite para la corriente de salida que el circuito
puede proporcionar. La corriente de base en el transistor es:
(2.5)J3cc
Puesto que el amplificador operacional tiene que proporcionar
la corriente de base IB, ésta tiene que estar entre los limites
de corriente de salida que entregue el amplificador
operacional . 2
Conforme aumenta la resistencia de carga el voltaje se
incrementa. Puesto que el emisor está al voltaje Vent, el
voltaje máximo en la resistencia de carga debe ser ligeramente
Ejemplo: LF351N, Amplificador operacional debajo ruido. Isal (máx) = 3.4 mA.

39
menor que Verrb, de modo que el transistor no entre en
saturación. Por lo tanto, se debe verificar que la corriente
de salida multiplicada por la mayor resistencia de carga no
exceda el valor de Vent.
Por ejemplo, si: VCC = 12 V, Vent = 5V, 0cc - 100 y se desea
obtener una corriente IR = lOpA, entonces; R - 700 K£> e
IB = 0.1 uA.
Puesto que las corrientes de colector y emisor son
aproximadamente iguales, se puede decir que la corriente de
carga fluye a través de la resistencia de retroalimentación.
Una variación de este circuito permite aislar la resistencia de
carga del nivel de referencia cero voltios, evitando asi
posibles problemas de ruido. Tal como se ve en la
figura 2.4 (b).
La función de transferencia del este circuito es:
Vsa.1 RL + R
Vent(2.6)
donde:
Vsal Voltaje de salida
Vent Voltaje a la entrada no inversora
RL . Resistencia de carga
La corriente en la resistencia de carga es:
40
IRLVsal
RL + R(2.7)
Reemplazando en la ecuación (2.6) y resolviendo, tenemos:
XRLVent
2 -
Por lo tanto, la corriente en la carga es proporcional al
voltaje de entrada y su valor se fija con la resistencia R.
Por ejemplo, sea- Vent = 5 V y se desea tener una corriente de
carga IRL - 10 pA, entonces R — 500 KQ-
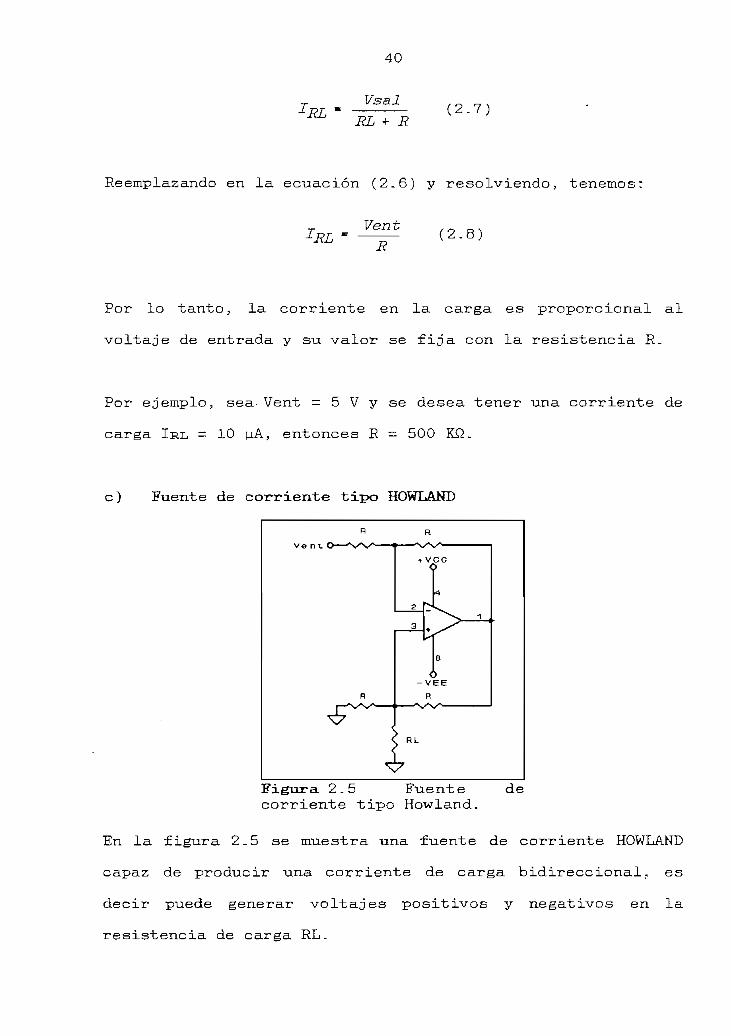
c) Fuente de corriente tipo HOWLAND
Figura 2.5 Fuente decorriente tipo Howland.
En la figura 2_5 se muestra una fuente de corriente HOWLAND
capaz de producir una corriente de carga bidirecciorial., es
decir puede generar voltajes positivos y negativos en la
resistencia de carga RL.

41
2.2.2 VENTAJAS Y DESVENTAJAS DE LAS FUENTES DE CORRIENTE.
Como se vio en el numeral anterior existen varios tipos de
fuentes de corriente, sin embargo tienen sus limitaciones.
En las fuentes de corriente que utilizan transistores, la
resistencia de carga debe ser de un valor en el orden de la
resistencia de calibración que se utiliza para fijar el valor
de la corriente de carga, de esta manera se garantiza el
correcto funcionamiento del transistor. Tomando en cuenta que
los termistores presentan baja resistencia respecto a la
resistencia de calibración, por tanto no existe compatibilidad
con este tipo de fuentes de corriente.
Las fuentes controladas por voltaje., requieren a su entrada no
inversora un voltaje fijo y preciso que sea invariante ante
fluctuaciones de los niveles de tensión, sobre todo los
relacionados con polarización- Estos circuitos no permiten
trabajar con resistencias de carga pequeñas comparadas con la
resistencia de fijación de corriente.
La fuente de corriente tipo Howland permite obtener una
corriente bidireccional en la carga; sin embargo también
requiere de un voltaje de entrada preciso y además de varias
resistencias idénticas para su óptimo funcionamiento.
2.2.3 FUENTE DE CORRIENTE DE PRECISIÓN DE 10 uA.
La figura 2 - 6 muestra el circuito equemático de la fuente de

42
corriente de precisión de 10 uA implementada, en base a un
amplificador operacional (LF351N), -un voltaje de referencia de
precisión (LM336.50) y un potenciómetro (Pl) para calibrar el
nivel de corriente deseado.
LU23G.50
*D17 D16
P5I OK
* LED I N D I C A D O RDE POLAR IZACI ON
L F 3 5 1 N C101 5 O u F / -16V
2.6 Fuente de corriente de precisión 10a) Voltaje de referencia de precisiónb) Fuente de corriente controlada con
carga flotante
El sistema incorpora un interruptor de 2 posiciones (SW3) el
cual habilita la carga del termistor (THER-A, THER-B) o de una
resistencia de valor constante 1 Kfí (R18) a la fuente de
corriente. De este modo los terminales de carga (LOAD-t-., LOAD-)
de la fuente de corriente no se quedan en ningún momento
43
abiertos. Este interruptor es útil sobretodo cuando se va a
cambiar de termistor.
La corriente en la resistencia de carga (!RL) de la fuente de
corriente esta dada por la ecuación 2.8; de donde, el valor de
R para obtener una corriente de 10 uA es:
Vent 5.00 V cnn 500 j£2
IRL 10 uA
El voltaje a la entrada no inversora (VR1) está dado por el
circuito integrado IJtf 336.50 que constituye un diodo zener que
en estado de conducción genera un voltaje de referencia de
precisión de 5.0 V ± 0.1%, La figura 2-6 (a) muestra el
circuito implementado; con el potenciómetro P5 podemos calibrar
el voltaje de referencia en 5.00 V ± 0.1%.
Para facilitar la calibración de la corriente de carga, la
resistencia R se dividió en una resistencia fija de 470 KQ (R4)
y un potenciómetro variable de 100 KQ (Pl).
El capacitor de 150 uF/16 V (CIO), se añadió posteriormente al
circuito para eliminar señales de ruido que oscilaban a una
frecuencia de 60 Hz , obteniéndose magníficos resultados .
2.2.4 AMPLIFICADOR DE SKfíAL.
El voltaje generado en los terminales del termistor al ser
aplicado una corriente de 10 uA es sumamente pequeño, la

45
resistencia variable externa.
Ancho de banda ajustable
internamente
externamente o seteado
Figura 2.7 Circuito de amplificación de señal,utilizando un amplificador de instrumentación.
La ganancia en lazo cerrado Av?
P3
donde:
P3 Potenciómetro externo para fijar la ganancia
del amplificador
Despejando P3 de la ecuación anterior, se tiene:
P3Av - 1
(2.10)
Considerando -que la resistencia máxima que puede presentar el
termistor es de 2, 5 Kfí; entonces, el voltaje máximo que se
Expresión dada por el fabricante del amplificador deinstrumentación, National Semiconductor.

46
tendrá en los terminales del mismo al circular una corriente de
10 uA es:
Vmax «= 2500 Q * 10 uA - 25 ¿?7
La ganancia en lazo cerrado, en función de los voltajes de
entrada y salida, esta definida como:
Av = — (2.11)V2 - VI
donde:
Vo Voltaje de salida
V2 - VI Voltaje de entrada diferencial
Reemplazando valores, se tiene:
Av - 5 V. = 20025 mV
Reemplazando Av en la ecuación (2.10); se tiene:
P3 5° K = 251 Q200 - 1
Al optimizar el circuito, se utilizó un potenciómetro de
precisión multivuelta de 200 Q. (P3)_
Cuando cortocircuitamos los terminales del termistor, el
voltaje diferencial a la entrada del amplificador es cero, con
lo cual a la salida se genera un voltaje DC de off-set que debe
ser anulado; para ello se utiliza un circuito divisor de
tensión g e alimenta el pin 8 del amplificador de

47
instrumentación., figura 2.7, nótese que este circuito toma el
voltaje de referencia VR1 — 5.00 V para su alimentación, de
este modo sus niveles de tensión no cambian ante posibles
variaciones de las fuentes de polarización.
Mediante la utilización combinada de los potenciómetros P2 y
P37 se puede calibrar los niveles de OV y 5V respectivamente a
la salida del anrolificador.
2_3 CIRCUITO ANALOGO-DIGITAL.
En la figura 2.8 se muestra en forma esquemática el proceso que
sigue la señal analógica par su digitalisación e ingreso al
computador.
S E N I A L DE RELOJ
VOLTAJE DE
SEN I ALESAWA.LOC ! CASDE E N T R A D A
Figura 2..digital.
Diagrama de bloques del circuito análogo -
El sistema CALTHER, pone a disposición del usuario seis
entradas analógicas; es decir, la posibilidad desconectar seis
termistores al mismo tiempo. Para el procesamiento de las
señales generadas por los termistores se dispone de un
demultiplexor analógico, el cual habilita una y solo una de las
48
señales de entrada a su salida, la señal seleccionada ingresa
a un conversor análogo-digital el cual genera el código binario
de la señal analógica de entrada.
Como sistema supervisor (generador de las señales de control),
que garantice el funcionamiento de todos los circuitos se
emplea un microcontrolador que además permite la comunicación
con el computador a través de su pórtico serial.
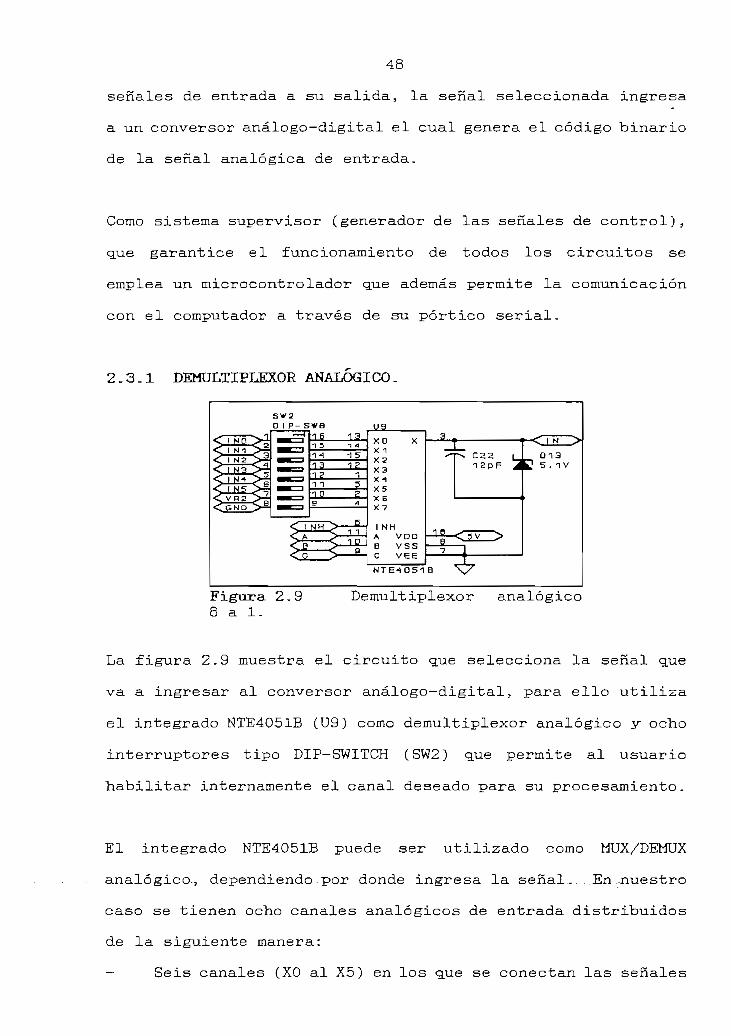
2.3.1 DEMOLTIPLEXOR ANALÓGICO.
NTE-1051B
Figura 2.9B a l .
Demultiplexor analógico
La figura 2.9 muestra el circuito que selecciona la señal que
va a ingresar al conversor análogo-digital, para ello utiliza
el integrado NTE4051B (U9) como demultiplexor analógico y ocho
interruptores tipo DIP-SWITCH (SW2) que permite al usuario
habilitar internamente el canal deseado para su procesamiento.
El integrado NTE4051B puede ser utilizado como MUX/DEMUX
analógico-, dependiendo .por donde ingresa la señal... En ..nuestro
caso se tienen ocho canales analógicos de entrada distribuidos
de la siguiente manera:
— Seis canales (XO al X5) en los que se conectan las señales

49
t ermi s"t o r e s adecuadamentegeneradas por los
acondicionadas.
Un canal (X6) en el que se conecta la referencia interna
de voltaje (VR2) de 5.00 V que limita el valor máximo del
conversor.
Un canal (X7) conectado al nivel de referencia cero
voltios.
Las señales de control (A, B, C) y la señal de habilitación
(INH), son generadas por el microcontrolador, las cuales
cumplen la siguiente tabla de verdad:
SEÑALES DE
CONTROL
INH
H
L
L
L
L
L
L
L
L
A
X
L
L
L
L
H
H
H
H
B
X
L
L
H
H
L
L
H
H
C
X
L
H
L
H
L
H
L
H
SEÑAL HABILITADA (X)
-
XO
-
-
-
-
-
-
-
-
_
XI
-
-
-
-
-
-
-
-
-
X2
-
_
-
-
-
-
-
-
_
X3
_
-
-
-
-
-
-
-
-
X4
-
-
-
_
-
-
-
-
-
X5
-
-
-
-
-
-
_
-
-
X6
-
-
-
-
-
-
-
-
-
X7
Tabla 2_2

50
A la salida del demultiplexor (PIN 3) se coloca un capacitor de
12 pF (C22) gue regula la señal de salida (X).
2.3.2 CONVERSOR ANALOGO-DIGITAL.
El rango de •temperatura a medirse está comprendido entre los 10
y 50 grados centígrados; además el sistema permite tomar
lecturas de temperatura con una resolución de centésimas de
grado centígrado.
En base a las premisas anteriores, calculamos el número de bits
mínimo que se requiere para la conversión; así:
sea:
R: Rango ~ 40 grados centígrados.
r; resolución = O.01 grados centígrados
tf =— c * 4000 nasosr 0.01
2n « 4000
Entonoes~ n * 12
donde:
N: # de pasos
n: # de bits; n e N
Utilizando un conversor de 12 bits se puede realizar mediciones
en el siguiente rango:
2n - 212 •= 4096
E -= N*r = 4096*0.01 - 41° C

51
En forma experimental se determinó los limites de temperatura
comprendidos entre 9 ° C y 58 °C aproximadamente, es decir un
rango de 49°C, cumpliendo las especificaciones planteadas.
El conversor análogo/digital de 12 bits utilizado es el
ADC1210HCD (U10) de NATIONAL SEMICONDUCTOR el cual realiza la
conversión mediante aproximaciones sucesivas. El conversor
requiere para su funcionamiento de una señal de reloj y un
voltaje de referencia externos. La señal de reloj (CLK) es
generada por el microcontrolador u8751, utilizando para el
efecto el TIbíER O (TO) como temporizador de 8 bits con
autorecarga generando pulsos a una frecuencia de 19.2 KHz
aproximadamente.
El voltaje de referencia (VR2) está dado por el LM336.50 (D7)
que proporciona un voltaje de precisión de 5 .00 V ± 0.1 % y es
calibrado por un potenciómetro de 10K (P6).
La figura 2.10 muestra el diagrama esquemático del conversor
análogo-digital.
ADC121DHCD
Figura 2.10 Circuito conversor análogo-digital.

52
2.3.2.1 FUNCIONAMIENTO.
Para iniciar el proceso de conversión, se debe poner un pulso
negativo en el pin de inicio (-SC, pin 13) del conversor. El
pulso de inicio es generado por la bandera de interrupción en
la transmisión (TI) del microcontrolador. El bit más
significativo Dll se pone en un estado bajo y el resto de bits,
DO hasta DIO se pondrán en un estado alto.
Cuando el pin de inicio cambia de estado, empieza (la
conversión. El estado de los bits Dll hasta DO cambian
secuencialmente., dependiendo de la señal analógica de entrada.
El diagrama de tiempos de la figura 2.11 muestra un ejemplo de
aplicación.
O 1 2 3 1 5 6 7 B 8 1O 11 12 13
DO
-ec
T I eUPO DE C O N V E R S I Ó N I jJ DATOS
Figura. 2.11 Diagrama detiempos para Vin - 2_412 V.
Cuando el voltaje de entrada al conversor (Vin) es 5,000 V, se
generan 4096 pasos; por lo tanto7 cuando el voltaje de entrada
53
es 2,412 V se tienen 1976 pasos aproximadamente, cuyo
equivalente en binario es 000011101111, que constituye la
correspondiente salida digital.
El proceso de conversión se termina cuando el bit menos
significativo DO cambia de estado y es indicado por el cambio
de estado en el bit de conversión completa (—CC, pin 14)_
La conversión se reinicia nuevamente cuando en el pin de inicio
se pone nuevamente un pulso negativo.
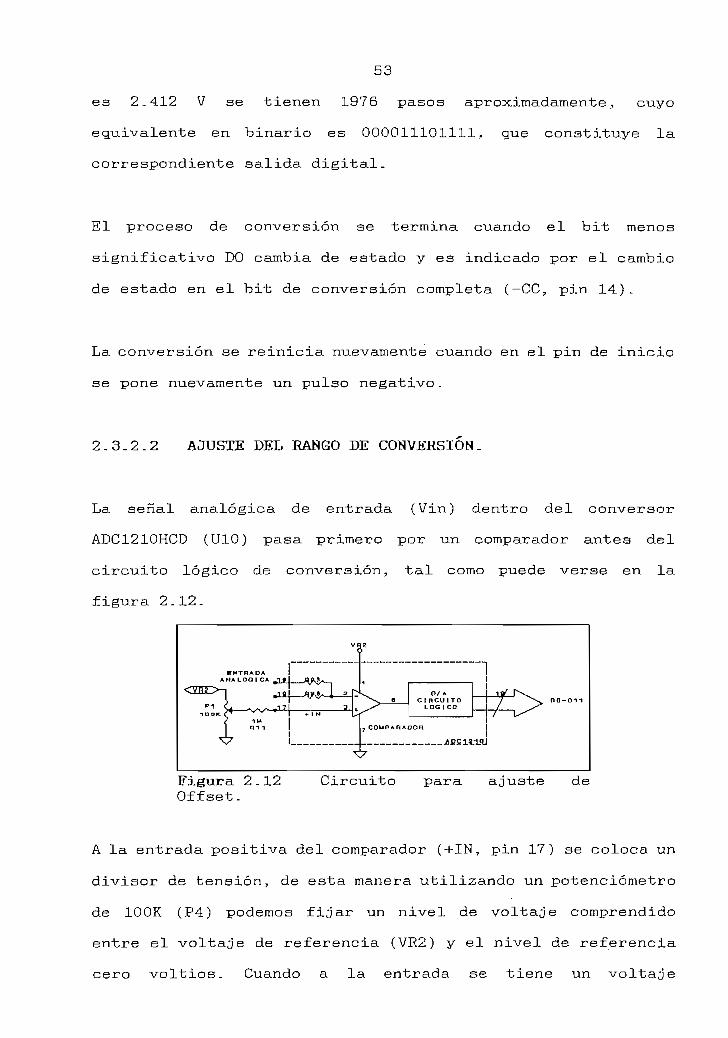
2.3.2.2 AJUSTE DEL RANGO DE CONVERSIÓN.
La señal analógica de entrada (Vin) dentro del conversor
ADC1210HCD (U10) pasa primero por un comparador antes del
circuito lógico de conversión, tal como puede verse en la
figura 2.12.
Figura 2.12 Circuito para ajuste deOffset.
A la entrada positiva del comparador (+IN, pin 17) se coloca un
divisor de tensión, de esta manera utilizando un potenciómetro
de 100K (P4) podemos fijar un nivel de voltaje comprendido
entre el voltaje de referencia (VR2) y el nivel de referencia
cero voltios. Cuando a la entrada se tiene un voltaj e

54
Vin = O V, el potenciómetro (P4) permite calibrar el comparador
de modo que a la salida del conversor se generen únicamente
niveles lógicos bajos.
El fondo de escala o nivel de tensión máximo de entrada al
conversor está impuesto por el voltaje de referencia (VR2), el
mismo que polariza el comparador.
De esta manera se establece el rango de trabajo del conversor
entre el nivel de referencia cero voltios y el voltaje de
referencia 5.00 V. Es importante que el voltaje de referencia
permanezca estable para garantizar el proceso de conversión.
2.3.3 MICROTONTROIADOR DB751H.
Los microcontroladores permiten manejar dispositivos externos
con la ayuda de interrupciones, pórticos, etc.._y la facilidad
de programación que presenta el assembler de la familia de
microcontroladores 8XX1, son algunas de la ventajas que hacen
del microcontrolador el elemento ideal para trabajos de
supervisión y control en sistemas microprocesados.
La circuiteria básica para el funcionamiento del
microcontrolador D8751H (U6) es muy simple7 tal como se ve en
la figura 2-13. En realidad la polifuncionalidad que presenta
el microcontrolador está determinada por el software que ae
almacena en la memoria del mismo.

55
Figura 2.13D8751H-
Microcontro lador
En el subcapítulo 3.1 correspondiente al diseño del software
del programa supervisor del microcontrolador 8751, se realiza
un estudio detallado del programa residente en la memoria del
microcontrolador; en este capitulo vamos a analizar el
funcionamiento de la circultería externa.
En el microcontrolador existen señales digitales que ingresan,
asi como también señales digitales que se generan para el
control de circuitos externos; así:
a) Señales digitales de entrada.
Las señales digitales que ingresan al microcontrolador se
indican en la tabla 2.3.
SE6JALES DIGITALES
DO
DI
D2
D3
D4
D5
PIN
Pl.O
Pl.l
P1.2
P1.3
P1.4
P1.5
(#)
(1)
( 2 )
(3)
(4)
(5)
( 6 )

56
D6
D7
D8
D9
DIO
Dll
-CC
RESET
RXD
P1.6
P1.7
P2.0
P2.1
P2,2
P2.3
INTO
(7)
(8)
(21)
(22)
(23)
(24)
(12)
RESET (9)
RXD (10)Tabla 2_3
Las señales analógicas ruego de ser digitalizadas DO a Dll
ingresan al microcontrolador a través de los pórticos Pl y P2
para su procesamiento.
La señal -CC está generada por el conversor análogo-digital e
indica el fin de conversión. Esta señal ingresa al
microcontrolador generando la interrupción externa cero (INTO,
pin 12).
El circuito de RESET se utiliza para inicialisar el sistema, el
diagrama se muestra en la figura 2.14. Este circuito como su
nombre lo indica, inicializa el funcionamiento del
microcontrolador utilizando para el efecto un pulsante externo
(SW1), el cual al ser presionado genera un nivel bajo a la
entrada de un inversor tipo schmitt-trigger DM74LS14N (USB),
obteniéndose a la salida un nivel alto. El microcontrolador
permanece en un estado de espera, hasta que el computador envíe
los códigos que habilitan nuevamente su funcionamiento.

57
PE ser >
Figura 2.14 Circuito de reset.
La recepción de señales que el computador envía al
microcontrolador, se realiza a -través del pórtico de recepción
serial (KXD). Se envían códigos escritos en lenguaje C ( véase
subcapitulo 3.2) que indican el canal analógico a ser medido _
b) Señales digitales de salida.
Estas señales se generan mediante software en el assembler del
microcontrolador 8751 y sirven para el control de los circuitos
externos, las señales digitales de salida que se genera se
indican en la tabla 2-4.
SEtfALES DIGITALES
CLK
baurate
A
B
C
INH
TXD
PIN ( # )
TO (14)
TI (15)
P2.4 (25)
P2.5 (26)
P2.6 (27)
P2.7 (28)
TXD (11)Tabla 2_4
El pin TO (14) y pin TI (15) generan la señal de reloj y el
baiadrate para la comunicación serial entre el microprocesador

58
y el computador, necesarias para iniciar el funcionamiento del
conversor.
Las señales de control (A, B, C) y la señal de habilitación
(INH) que el demultiplexor requiere para su funcionamiento son
generadas a través del pórtico P2.4 al P2.7 del
microcontrolador. Estas señales además permiten visualizar el
canal analógico medido en un display de siete segmentos con
ánodo común CSS-514E (DISP1), cuya circuiteria se muestra en la
figura 2,15. Utiliza el decodificador BCD a siete segmentos
7447APC (Ull) para la decodificación de las señales de control
A, B, C, generadas por el microcontrolador.
Figura 2.15 Circuito indicador del canalutilizando display de siete segmentos.
La transmisión de señales del microcontrolador al computador se
realiza utilizando el pórtico de transmisión serial (TXD), el
cual trabada como un buffer de 8 bits. A través de éste se
envían los dos bytes correspondientes al canal analógico medido
hacia el computador,
2,3,4 COMUNICACIÓN CALTHER-COMPUTADOR.
La comunicación entre el sistema CALTHER y el computador se

59
realiza a través del pórtico serial, para lo cual se utiliza un
circuito de ínterfaz transmisión - recepción que cumpla las
especificaciones EIA RS-232C.
La figura 2.16 muestra la circuiteria implementada, utilizando
para la transformación de datos, un DTL driver de línea MC1488P
(U7A) el cual genera a su salida niveles de tensión de ± 10 V
requeridos para la comunicación serial. Para la recepción de
códigos binarios que envía el computador se utiliza un inversor
schmitt trigger DM74LS14N (USA) además se ha colocado un diodo
zener de 5.1 V (D6) a la entrada del mismo para fijar los
niveles TTL de entrada.
CONHECTOR DB9
CON11
Figura 2.16serial.
ínterfaz de comunicación
Un conector tipo DB9 (CON1) es utilizado como terminal para la
conexión del cable serial que llevará la información entre el
equipo y el computador.

CAPITHKL3
El programa desarrollado para el mícrocontrolador permite
administrar los recursos del sistema (supervisor del sistema),
controlar el conversor A/D y las comunicaciones con el
computador personal. Para el conversor A/D genera las señales
necesarias para.su funcionamiento; inicio de conversión (SC)?
fin de conversión (CC); mediante buses de control y de datos.
A través de la comunicación serial el operador puede
seleccionar el canal analógico a ser medido y junto con los
programas respectivos en el computador realisar un
procesamiento de información.
El programa del microcontrolador fue desarrollado con ayuda del
ensamblador de CYBERNETIC MICROSYSTEMS V3.2. Los programas
para el computador personal se desarrollaron en Lenguaje C
utilizando el compilador TURBO C de BORLAND INTERNATIONAL, a
través de los cuales se manejan los datos enviados por el
sistema de adquisición y se generan las tablas de calibración.
Además se implemento un sistema en FOXPRO V2 . O para manejar los
diferentes programas de adquisición de datos y procesamiento de
información presentando al usuario opciones de ayuda e
información general . De esta manera el usuario no requiere
conocimientos profundos de lenguajes de programación ni saber

61
la arquitectura misma del sistema.
3.1 PROGRAMA SUPERVISOR EN EL MICROCONTROLADOR 8751.
Para la operación del sistema de adquisición de datos se ha
desarrollado el software correspondiente en el Assernbler del
microcontrolador Intel 8751H, este programa se encarga de la
configuración inicial del sistema y además contiene las
sigui ent es subrutinas principales:
- Rutina de comunicación serial, que permite la recepción y
transmisión de datos entre el equipo y el computador,
- Rutina de selección del canal a medir, a partir de un
comando enviado desde el computador.
- Rutina de medición del canal seleccionado y almacenamiento
en dos registros internos de 8 bits del microcontrolador.
Además se realiza la transmisión del byte más
significativo al computador,
- Rutina de transmisión del byte menos significativo al
computador,
Siguiendo las normas de programación de los microcontroladores,
primero se debe especificar las etiquetas de memoria RAM
interna.
DSERIAL EQU 7FH
BSERIAL BIT OOH
BINTO BIT 01H
Inicialmente el microcontrolador se sitúa en la dirección OOOOH

62
la cual corresponde al reset inicial., donde se encuentra la
orden de saltar y salir de la zona de interrupciones para
continuar ejecutando el programa principal a partir de la
dirección 0030H. Automáticamente se especifican las
direcciones de las atenciones a las interrupciones.
ORG OOOOH
LJMP INICIO
ORG 0003H
LJMP EXINTO
ORG OOOBH
LJMP TIMERO
ORG 0023H
LJMP SERIAL
ORG 0030H
INICIO:
Habilitamos la interrupción serial y seleccionamos el timer O
y timer 1 para que trabajen como temporisadores, es decir,
colocamos en el bit de control C/T un 1L. Luego se selecciona
el modo de operación mediante el par de bits Ml=l y MO-0 que
corresponde al modo 2 de trabajo como temporasador de 8 bits
con autorecarga. El byte de control es el siguiente:
TMOD
GATE
0
C/T
0
MI
1
MO
0
GATE
0
C/T
0
MI
1
MO
0
MOV
TIMER 1
IE?#10010000B
TIMER O
;Habilita interrupción serial

64
El pórtico serial es full-duplex, lo cual significa que puede
transmitir y recibir simultáneamente. También la recepción es
"buffereada" lo que permite que se pueda-comenzar la recepción
de un segundo byte antes de que el byte previamente recibido
haya salido del registro de recepción. El pórtico serial recibe
y transmite accesando a un registro de función especial llamado
SBUF.
El pórtico serial puede operar en cuatro modos:
- En modo O actúa como registro de desplazamiento con una
velocidad igual a 1/12 de la frecuencia del oscilador.
- En modo 1 actúa como transmisor y receptor asincrónico de
8 bits con frecuencia variable
- En los modos 2 y 3 actúa como transmisor y receptor
asincrónico de 9 bits.
El modo 1 de trabajo se adapta a nuestro caso, utiliza 10 bits
que son transmitidos a través de TDX o recibidos a través de
RXD.
Los bits utilizados tienen la siguiente función:
1 bit de start (0)
- 8 bits de datos
1 bit de stop (1)
Para seleccionar el modo 1 se utiliza el registro de control
del pórtico serial SCON, colocando en los bits SMO^O y SM1=1,
SM2 "habilita las comunicaciones multiprocesador, BEN habilita
la recepción serial, TI es la bandera de transmisión y RI la de

recepción.
65
SCObí
SMO
0
SM1
1
SM2
0
REbT
1
TB8
0
RB8
0
TI
0
RI
0
Para habilitar la. interrupción externa INTO., se utiliza el
registro especial de habilitación de interrupciones IE el cual
permite- modificar individualmente cada uno de sus bits para
activar o desactivar las interrupciones. El bit EA habilita
todas las interrupciones que se encuentran activadas.
ES controla las interrupciones producidas en el pórtico serial,
ET1 controla la interrupción generada en el sobre flujo del
timer 1, ETO habilita la interrupción generada en el sobre
flujo del timer O y EXO habilita la interrupción externa O.
En primera instancia se habilita únicamente la interrupción
serial.
IE
EA
1
-
0
ET2
0
ES
1
ET1
0
EX1
0
ETO
0
EXO
0
El timer O genera la señal de reloj (CLK) para el conversor A/D
a la siguiente frecuencia:
fCLKFrec. crista.!
12 * (256 - THO}(3.2)
Si colocamos en el registro THO un valor igual a OFDH=253,

67
MOV A,DSERIAL
3.1.2 SELECCIÓN DEL CANAL ANALÓGICO.
Cuando el computador envía el comando O, el microcontrolador
entra en un lazo de espera hasta que en el buffer del puerto
serial se coloque el número del canal a ser medido (debe ser
enviado por el computador), el número del canal seleccionado se
almacena en el registro R7 _
COMANDOO:
JNB BSERIAL,$
CLR BSERIAL
MOV A,DSERIAL
MOV R7,A
El código binario (formado por tres bits) que selecciona el
canal a medir se lo envía al pórtico P2.4, P2.5, P2.6 que sirve
como bus de datos que habilita la salida seleccionada en el
MUX/DEMUX NTE4051B (U9). Esta subrutina también habilita el
funcionamiento del MUX/DEMUX a través del pin P2.7 y finalmente
regresa al programa principal.
SWAP A
ORL A,#10001111B;
MOV P2,A
CLR P2.7
LJMP PROGRAMA

68
3.1.3 SUBRUTINA PARA MEDICIÓN DEL CANAL SELECCIONADO.
Cuando al microcontrolador se envia el comando 1, el programa
principal salta a esta subrutina, donde se activa un contador
de 16 mediciones con el objeto de tomar varias lecturas y
realizar un promedio evitando asi problemas de ruido en los
voltajes de entrada. Dado que el tiempo que se requiere para
obtener este promedio es despreciable en comparación a los
tiempos de transmisión y recepción serial, se puede seguir
considerando a este promedio como un valor instantáneo.
Inicialización de registros:
MOV R6,#010H .-Contador de 16 mediciones
MOV R1,#OOH ;Registros auxiliar
MOV R07#OOH
Se genera un lazo DO para tomar las lecturas del conversor A/D
las mismas que se acumulan en los registros Rl y RO. Para
iniciar la lectura de mediciones se inicialisan las banderas de
interrupción "BINTO" y "TI" y se genera un retardo de 10 ciclos
de máquina antes de enviar el pulso de "START" al conversor
A/D.
RELEERAD:
CLR C
CLR BINTO
CLR TI
MOV R5,tt005H
DJNZ R5?$
SETB TI

69
Cuando se produce la interrupción externa O indicando que la
conversión ha terminado, se leen los datos del pórtico Pl
(8 bits menos significativos) y , se sutna.n a los valores
anteriores, el resultado se almacena en el registro RO.
JNB BINTO,$
CLR BINTO
MOV A,P1
CPL A
ADDC A,RO
MOV RO,A
Luego se lee el valor del pórtico P2 (4 bits más
significativos) se suman a los valores anteriores y se
almacenan en el registro Rl. Este proceso se repite hasta que
el registro R6-0.
MOV A,P2
CPL A
ANL A?#QOQ01111B
ADDC A,R1
MOV R1,A
DJNZ R6,RELEERAD
La suma almacenada en RO y Rl se divide para 16 mediante cuatro
rotaciones a la derecha para obtener el promedio. Este
resultado se almacena en dos bytes: en R3 el byte menos
significativo y en R4 el byte más significativo.
MOV A,RO
RR A
RR A

70
RR A
RR A
ANL A #000011118
MOV RO,A
MOV A,R1
ANL A,#00001111B
SWAP A
ORL A,RO
MOV R3,A ;Almacena en R3 el byte menos significativo
MOV A,R1
ANL A?#11110000B
SWAP A
MOV R47A ;Almacena en R4 el byte más significativo
El registro R4 se transmite al computador y se retorna al
programa principal.
MOV
MOV
LJMP
A,R4
SBUF,A
PROGRAMA
3.1.4 SUBRUTINA PARA TRANSMISIÓN DE DATOS.
Como el conversor A/D con que se está trabajando es de 12 bits,
los datos maestreados se los almacena en dos registros R3 y R4.
En el primero se almacenan los 8 bits menos significativos y en
el segundo los 8 bits más significativos. El registro R4 es
transmitido al computador en la subrutina anterior.

71
Cuando al microcontrolador se envía el comando 2 el programa
ejecuta esta subrutina donde se envían los 8 bits menos
significativos al computador y se retorna al programa
principal.
MOV A,R3
MOV SBUF,A
LJMP PROGRAMA
3.1.5 DIAGRAMA DE BLOQUES DEL PROGRAMA.
I N I C I O
C O NFIGURACIONI N I C I A L
R E C IBO COMANDODESDE EL
COMPUTADOR
NO
SUBHUTi NA PARASELECCION DELCANAL A MED I R
SUBRUTINA PARA M E D I C I Ó NDHL CANAL SELECCIONADOY T R A N S M I S I Ó N DE B BITSMSB AL COMPUTADOR
SUBRUTINA PARA T R A N S M I S I Ó NDE 8 BITS LSS ALCOMPUTADOR

72
3.2 PROGRAMAS PARA LA COMUNICACIÓN DE DATOS.
Los programas en el computador personal que permiten establecer
la comunicación entre el usuario y el sistema de adquisición de
datos fueron desarrollados en TURBO C.
El programa para la calibración de termistores mide la
resistencia que marca el termistor de prueba y la
correspondiente temperatura que marca el termistor patrón. El
programa desarrollado para medición de temperatura muestra la
resistencia y la temperatura que marca el canal de entrada
habilitado. Los dos programas son similares., por lo tanto
vamos a analizar el programa realizado para la medición de un
canal analógico.
3.2-1 ESPECIFICACIONES INICIALES.
Los programas desarrollados siguen las normas para los
compiladores TURBO C, estas son:
a) Definición de los archivos de incl-usión.
Para utilizar una función de biblioteca puede ser necesario
incluir cierta información especificada dentro de la parte
principal del programa. Por ejemplo, las declaraciones de
funciones y definiciones de constantes simbólicas suelen
necesitarse cuando se usan funciones de biblioteca. Esta
información suele encontrase almacenada en ciertos archivos
incluidos en el compilador a los cuales se accede mediante la
sentencia del preprocesador "#include <nombre_archivo>". Los
73
archivos de inclusión utilizados en este programa son:
#include <stdio.h> Define tipos y macros necesarios para las
entradas/salidas estándar.
#include <taios.h> Declara varias funciones usadas cuando se
llama a rutinas IBM-PC ROM BIOS.
#include <conio.h> Declara varias funciones usadas cuando se
llama desde consola rutinas de
entrada/salida.
#include <time.h> Define una estructura de llenado en
rutinas de conversión.
#include <math.h> Declara prototipos para las funciones
matemáticas.
#include <ctype.h> Contiene información usada por los
caracteres de información.
ífinclude <stdlib.h> Declara comúnmente varias rutinas
utilizadas.
#include <dos.h> Define constantes y declaraciones del DOS.
t>) Definición de constantes simbólicas_
Una constante simbólica es un nombre que sustituye una
secuencia de caracteres. Los caracteres pueden representar una
constante numérica, una consta.nte de carácter o una constante
de cadena. Cuando se compila el programa, cada aparición de
una constante simbólica es reemplazada por su correspondiente
secuencia de caracteres-
Se define una constante simbólica escribiendo "#define nombre
texto" y las utilizadas en este programa son:
tfdefine SETTINGS (OxEO¡x03¡0x00¡0x00);

74
Define una combinación de bits necesarios para la comunicación
serial; estos valores indican lo siguiente:
OxEO: 9600 baurl rate
OxE3: 8 bits de datos
0x00: 1 bit de entrada
0x00: No polaridad
La función "bioscom ( )" que se utiliza para la comunicación
serial requiere se definan las siguientes constantes:
tfdefine INIT_PORT O;
Setea los parámetros de comunicación especificados en SETTINGS.
#define SEND 1;
Envia los datos al pórtico serial
ífdefine RECEIVE 2;
Recibe los datos desde el pórtico serial.
4f define CHECK 3;
Retorna al estado actual del pórtico de comunicación.
Los comandos que el computador envía al microcontrolador a
través del pórtico serial también se los ha definido como
constantes asi:
ífdefine SEL_CANAL O;
Selecciona el canal analógico a medir.
tfdefine REQ^HBYTE 1;
Lee el byte más significativo de la medición realizada.
tfdefine REQ_HBYTE 2;
Lee el byte menos significativo de la medición realizada.
ífdefine MAX_NUM_SAMPLES 15;
Almacena el número de muestras que toma el computador para
76
float2 oíd, temp, ohms, error, CD, CC, CB, CA;
float dato, A, B, Cl, C2? RS;
int3 channel, flag, i;
char4 c;
Cuando se trabaja con archivos secuenciales de datos, se debe
establecer una área de buffer donde la información se almacena
temporalmente mientras se está transfiriendo entre la memoria
de la computadora y el archivo de datos. El área del buffer se
establece escribiendo "FILE *'ptvar", donde "ptvar" es la
variable puntero que indica el inicio de esta área. Los
archivos secuenciales utilizados en el programa son:
FILE *fpt, *fcoef;
Inicialización de variables.
flag = 0;
Esta bandera se activa cuando se sale del programa.
oíd = 20; temp - 20 ; error = O ;
Valores iniciales utilizados cuando se realiza la primera
lectura.
El programa solicita al usuario que ingrese por teclado el
canal analógico que está utilizando, este valor es almacenado
en la variable "channel".
cprintf("Ingrese el canal a medir (O a 5):");
float: Número de punto flotante, contiene un puntodecimal y/o un exponente, ocupa 1 palabra en memoria.
int: Cantidad entera, ocupa 2 bytes o 1 palabra enmemoria.
char: Carácterf ocupa 1 byte en memoria.

77
cscanf ("%ld" , &channel) ;
El símbolo "%ld" nos indica que el valor que toma la va.riable
"channel" es un número entero decimal de 1 cifra. Si por error
se ingresa un número que no este dentro del rango indicado., se
genera una rutina de error y se sale del programa. La secuencia
de escape "\a" genera un sonido de alerta,
if (channel < O ¡ ¡ channel > 5)
•C
cprintfC "Fuera de rango .. -\a" );
delay (3000);
return;
Dependiendo del canal seleccionado se determinan los
coeficientes del termistor . Estos coeficientes están
almacenados en un archivo de nombre "canaln.cof" donde "n" es
el número del canal a medir. Por ejemplo si el canal
seleccionado es el cero (O) se leen los datos del archivo
"canalO . cof " .
Si el archivo de datos no puede ser abierto porgue no se
encuentra en el directorio raíz o se encuentra alterado por
alguna circunstancia, la función "fopen( ") " retorna el valor
NULL. Este valor permite desplegar un mensaje de error y salir
del programa.
if (channel "0)
í
if((fcoef = fopenC'canalO.cof'V'r")) ==
78
•ecprintf(" Error, archivo \"canal0.cof\ no se puede abrir \a" ) ;
delay(3000);
clrscr( ) ;
exit(l);
El archivo "canalO.cof" contiene los valores de los
coeficientes A, B, Cl, 02 y RS- asi:
-4.40402e+00
+3.43869e+03
+4.46742e-02
~2.70070e-07
-f-l_14450e+03
Estos valores son leídos y asignados a las variables
respectivas .
f scanf (fcoef , "%e"s &dato ) ; A - dato;
f scanf ( fcoef , "%e", &dato); B = dato;
f scanf (fcoef ? "%e" , &dato } ; Cl - dato:
f scanf (fcoef ., "%e" ? &dato) ; C2 = dato;
f scanf (fcoef , "%e", &dato); RS = dato;
Finalmente el archivo de datos es cerrado.
f cióse ( fcoef ) ;
Cuando se selecciona el canal a medir también se establece los
coeficientes que permiten aproximar el valor decimal a su
correspondiente valor de resistencia. Por ejemplo para el

79
canal O, tenemos;
CD - -3.511324153107376E-10;
CC - +2.079270315370728E-6;
CB = +4.902300262194896E-1;
CA = +4.649716566700133E-4-2;
Luego de este proceso se inicializa el pórtico de comunicación
serial.
status = bioscom (INIT_PORT3 SETTINGS, COMÍ);
La función "bioscom ()" retorna un valor entero de 16 bits de
los cuales los 8 bits más significativos corresponden a los
bits de "estatus" y los 8 bits menos significativos dependen
del valor especificado en SETTINGS. Los bits de "status" se
definen de la siguiente manera:
Bit 15 Fuera de tiempo
Bit 14 Transmit shift register empty
Bit 13 Transmit holding register empty
Bit 12 Ruptura detectada
Bit 11 Franming error
Bit 10 Error de polaridad
Bit 9 Overrun error
Bit 8 Datos correctos
De este modo se conoce el estado de la comunicación serial y se
verifica si no se han producido errores a través de la
siguiente rutina:
if (status - = Ox OOFF)

80
cprintf( "Error y fuera cíe tiempo . ._\a");
delay (3000);
exit (1);
Si el pórtico de comunicación se encuentra habilitado, se
presenta al usuario las siguientes opciones:
cprintf("<M> Medir <I> Imprimir <G> Grabar <S> Salir");
cprintf( "Escoja una opción:");
El programa ingresa en un laso cerrado mientras la variable
"flag" sea igual a cero (O). Se llama a la subrutina
"average_data" para tomar la lectura enviada por el
microcontrolador , este valor es asignado a la variable "data11.
Con los coeficientes del canal analógico seleccionado se
calcula el valor de resistencia y con los coeficientes del
termistor (leidos del archivo de datos "canaln. cof " ) se calcula
el valor de temperatura. Además se determina el error relativo
entre la medición de temperatura anterior y la actual. Un
error relativo pequeño (menor que 0.1%) permite establecer
cuando la temperatura se ha estabilizado, garantizando que por
lo menos dos mediciones sucesivas son iguales. Este punto
puede ser tomado como punto de calibración para generar la
tabla de calibración del termistor .
do
{
Son();
oíd = temp;
data - average_data(channel,MAX_NUM_SAMFLES) ;

81
ohms - CD*data*data*data+CC*data*data+CB*data+CA;
temp = B/(log(ohms)-A)-273.15+Cl+C2*(ohms-RS)*(ohms-RS);
error - f atas (old-temp)/temp#100 ;
Los cálculos realizados se muestran en pantalla, además se pide
al usuario que escoga una opción del menú es decir <M> medir,
<I> Imprimir, <G> Grabar o <S> Salir. La letra seleccionada se
transforma a mayúsculas y se muestra en la pantalla.
cprintf("RESISTENCIA = %6.2± Q", ohms);
cprintf("TEMPERATURA = %4.2f °C", temp);
cprintf("Error: %6.2f %", error),-
c = getch();
if (islower(c)) c - toupper(c);
put'ch (c) ;
En las figuras 6.1 y 6.2 se muestran las pantallas que se
presentan al usuario cuando se realiza la medición de
temperatura y la calibración de termistores respectivamente.
Cuando se elige la opción <M> Medir presionando cualquier
tecla, no necesariamente la letra <M>, se ejecuta nuevamente el
lazo DO donde se realizan las siguientes tareas:
- Se llama a la subrutina average_data (), que almacena en
la variable "data" el valor decimal enviado por el
microcontrolador.
- Se realizan los cálculos para determinar la resistencia,
temperatura y el error cometido respecto a la lectura
anterior.
- Se muestra en pantalla los resultados obtenidos.
- Se pide al usuario escoger una nueva opción.

82
SISTEMA DIGITAL PARA CALIBRACIÓN DE TERMISTORESMEDICIÓN DEL CANAL ANALÓGICO O
RESISTENCIA = 994.92 QTEMPERATURA = 31.02 °C
Error: 0.00 %
<M> Medir <I> Imprimir <G> Grabar <S> Salir
Escoja una opción: M
Figura 6.1 Menú para medición de temperatura_
SISTEMA DIGITAL PARA CALIBRACIÓN DE TERMISTORESCALIBRACIÓN DEL CANAL ANALÓGICO 4
TEMPERATURA (CANAL O)RESISTENCIA (CANAL 4)
Error: O.00 %
= 31.03 °C= 1473.00
<M> Medir <I> Imprimir <G> Grabar <S> Salir
Escoja una opción: M
Figura 6.2 Menú para calibración de -termístores.
Si se escoje la opción <I> Imprimir., se envían los resultados
de la medición a la impresora con el objeto de tener un reporte
impreso de los puntos de calibración.
if (c == '!')
-C
85
variable "average". Además oada vea que el computador envía un
código al puerto serial se verifica que la comunicación entre
el equipo CALTHER y el computador se haya realizado
satisfactoriamente .
for (sample ~ O, average - O; s ampie < num_samples: sample-f+)
{
status = bioscom(SEND; REQ_HBYTE, COMÍ);
if ( !RS232( status)) exit (1);
data - bioscom(RECEIVE; O, COMÍ) & OxFF;
data #= 256;
status - bloscom(SEND, REQ_LBYTE? COMÍ);
if ( !RS232( status)) exit (1);
datalow = bioscom(RECEIVE, O, COMÍ) & OxFF;
data += datalow;
average += data;
Si el número de muestras es mayor que 1, calcula el valor medio
y retorna al programa principal .
if (num_samples > 1)
average /- num_samples;
return ( average ) ;
3.2.4 SDBRÜTINA PARA VERIFICACIÓN DE LA COMUNICACIÓN
SERIAL.
Como se indicó anteriormente , cada ves que el computador envía
un código al microcontrolador es necesario verificar el éxito
de la comunicación serial. Este proceso se realisa en la

86
subrutina RS232 .
Definición de variables.
clock_t start , wtime., end;
Se genera un lazo con la variable "wtime" que tarda alrededor
de 5 segundos, si en este periodo no existe comunicación se
despliega un mensaje de error. También se despliega el mensaje
de error si en el "status" de la comunicación se ha generado un
error de TIME_OUT.
f or ( start-clock ( ) ? wtime-Q . O : wtime < 1 . Oe-4 ; status-OxQOFF )
{
if ((status - bioscom(CHECK; O, COMÍ)) & DATA__READY )
break;
end - clock( ) ;
wtime - ( end-start )/CLK_TCK;
}
if (status & TIME_OUT ¡ ¡ status == OxOOFF)
{
cprintf( "Error , 'en la comunicación serial... ");
return O ;
Los errores en la comunicación serial se generan cuando el
computador envía un código al microcontrolador y el eg_uipo
CALTHEK no se encuentra, encendido o el microcontrolador está
mal inicialisado ; en este caso se debe presionar el botón de
KESET del equipo para reinicialisar el funcionamiento del
microcontrolador,

87
3.2.5 DIAGRAMA DE BLOQUES DEL PROGRAMA.
COHPIGUflAC(OHI H I C i AL
INGRESE ELCANAL A MEDIR ?
SELECCIONE UNA OPCIÓN?
MED I RGRABAR
I M R R I U I RSAL t F*
LECTURA DC C O E F I C I E N T E SDEL A R C H I V O CORHeSPONO I ENTE
AL C A N A L S E L E C C I O N A D O
I N I C 1 AL|ZACION DCLPÓRTICO DE COMUNICACIÓN
SUBRUTINA PARA LECTURADG DATOS Y CALCULODEL VALOR MEO t o
IMPRCSION DELPUNTO OG CALIBRACIÓNMEDÍ DO
ALMACENAMIENTO DELPUNTO DG CAL I B R A C I Ó N ENCL ARCHIVO "MED I R. OAT"
RETORIJO ALMENÚ PRINCI PAL
3.3 PROGRAMAS PARA EL PROCESAMIENTO DE DATOS.
Básicamente se ha desarrollado dos programas; el primero en
Lenguaje C, toma varios puntos de calibración que hayan sido
almacenados en el archivo de datos "*.dat" y genera los
coeficientes del termisto asi como su tabla de calibración. Elt
segundo programa fue desar-rollado en FOXPRO, el cual genera un
menú con las opciones disponibles al usuario; de esta manera se
facilita la utilización del sistema CALTHER.

3.3.1
88
GENERACIÓN DE LAS TABLAS DE CALIBRACIÓN,
Este programa mantiene algunas funciones y variables utilizadas
en un programa similar desarrollado por RISO (Instituto de
Calibraciones de Dinamarca) en Lenguaje PASCAL1.
Archivos de inclusión.
#include <stdio,h>
#include <conio.h>
ítinclude <math.h>
tfinclude <ctype.h>
tfinclude <stdlib.h>
#include <dos.li> Define constantes y declaraciones del DOS.
#include <io.h> Contiene estructuras y declaraciones para
rutinas de entrada/salida de bajo nivel.
#include <fcntl.h> Define constantes simbólicas usadas en
conexión con una librería abierta
Definición de constantes,
tfdefine TRUE 1
tfdefine FALSE O
Definición de funciones.
void Cti ( void ) ; Lee la información del archivo que
contiene los puntos de calibración
"calibrar.dat".
void S ( void ); Realisa los cálculos para determinar los
Cortesía del Instituto de Ciencias Nucleares de laEscuela Politécnica Nacional.

89
coeficientes del termlstor.
void Vypocet(void); Calcula los coeficientes del termistor.
void Tisk ( void ) ; Imprime los puntos de cal ib ración y los
coeficientes del termistor.
void Tabl er C void ) ,- Imprime la tabla de calibración.
Definición de variables globales.
int Konec, n, Cislo;
float st, sr, st2, str, pod, A, B, Cl, C2, RS;
float t[100],r[100],ti[100],rl[100],ttClOO],tdClOO],t2ClO03;
3.3.1.1 PROGRAMA PRINCIPAL.
Definición de variables.
int flag = O; Esta bandera cambia de estado (flag = 1) cuando
se pulsa alguna de las teclas especificadas en
el programa.
char c; En la variable "c" se almacena el código de la
tecla presionada.
El programa principal sigue los siguientes pasos:
— Rutina que lee la información del archivo que contiene los
puntos de calibración "ca1 ibrar.dat".
— Rutina que realiza los cálculos para determinar los
coeficientes del termistor.
— Rutina que imprime los puntos de calibración leídos del
archivo de datos, cálculos realizados y coeficientes del
termistor.
- Rutina que imprime la tabla de cal ibración.

90
da
£
Cti( ) ;
Vy pocet ( ) ;
£
Tisk( ) ;
Tabler( ) ;
Finalmente se pregunta al usuario si desea salir del programa.
cprintfí "Salir del programa <S/N> ?: ");
El código de la tecla presionada se almacena en la variable "c"
y se cambia a mayúsculas en caso de presionarse en minúsculas.
c = getchí ) ;
if ( islower ( c) ) c = toupper ( c) ;
Cuando se ha presionado la tecla <N>, la variable "Konec" no es
alterada ("Konec = FALSE") y se repite todo el proceso desde el
inicio. Si al contrario se presiona la tecla <S> la variable
indicada cambia de estado ( "Konec = TRUE" ) y se sale del
programa principal .
if ( c == *S' ¡ i c == 'N' ) flag = 1;
while ( flag == O ) ;
if ( c == 'N' ) Konec = FALSE;
else Konec = TRUE;
while ( 1 Konec ) ;
return ;

91
3-3,1.2 SUBRÜTINA PARA LA LECTURA BE LOS PUNTOS DE
CALIBRACIÓN.
Definición de variables,
int i, handle;
float dato, bits ;
FILE *fpt;
El programa solicita al usuario que ingrese el número del
termistor de prueba? este valor es almacenado en la variable
"Cislo".
cprintf("Ingrese el número del Termistor: ");
cscanf("%d",&Cislo);
Luego abre el archivo de datos "calibrar.dat" el cual contiene
los puntos de calibración correspondientes al termistor de
prueba. Este archivo será utilizado solo para lectura de datos
sin poderse añadir ni eliminar información desde este punto del
sistema.
handle = open("calibrar.dat", 0_RDONLY);
Se -determina el número de puntos de calibración que contiene el
archivo de datos, este valor entero es almacenado en la
variable "n" y mostrado en pantalla.
bits = filelength(handle);
n = ceil(bits/18);
cprintf("Puntos de calibración leídos: %2d", n);
Tomando en cuenta que los arrays donde se almacena la

92
información de temperatura y resistencia de los puntos de
calibración están definidos de dimensión 100, el número de
puntos de calibración no debe exceder este limite. Si el número
de puntos de calibración es menor que 2 o mayor que 100, se
ejecuta la siguiente subrutina que retorna al programa
principal .
if ( n < 2 ! i n > 100 )
•C
cprintf ( "Puntos de calibración fuera de rango... \a" ) ;
Konec = TRÜE;
return;
Si el archivo de datos no puede ser abierto porque esta dañado
o simplemente porque no existe, se despliega el siguiente
mensaje de error:
if((fpt = fopen( "calibrar.dat", "r")) == NÜLL)
cprintf ( "Error , archivo no se puede abrir. . . \a");
Una vez abierto el archivo de datos y determinado el número de
puntos de calibración "n", se genera un lazo FOR desde O hasta
"n" para ir leyendo uno a uno los datos y almacenando dicha
información en los arraye t [1001 para la temperatura y rClOO]
para la resistencia. Cada vez que se realice una lectura
verificamos que el dato esté dentro del rango establecido , es
decir:
Rango de resistencia: de 400Q a 250QQ
Rango de temperatura: de 5°C a 55 °C

93
Se ha dejado un margen de tolerancia con el objeto de hacer más
flexible el sistema, sin embrago si los datos leídos del
archivo "calibrar.dat" se salen de este rango, se despliega un
mensaje de error y se regresa al programa principal.
for ( i = 0; i < n; i
fscanf (fpt, "%f" , £dato) ;
t[i] = dato;
if ( t[i] < 5 ¡ ! t[i] > 55 )
{
cprintf ( "Dato fuera de rango .. .\a" );
Konec = TRUE;
return;
}
fscanf (fpt , "%f" , &dato);
r[i] - dato;
if ( r[i] < 400 ¡ J r[ij > 2500 )
{
cprintf ( "Dato fuera de rango .. .\a" );
Konec = TRUE;
return;
>
ti [i] = l/(t[i] -t- 273.15);
Cada dato de temperatura leído se transforma a grados kelvin
sumando 273.157 el inverso de este valor se almacena en el
array tl[100]; así mismo se calcula el logaritmo natural de la
94
resistencia leída y se almacena en el array rl[100].
Cuando se ha terminado de leer todos los puntos de califor ación ,
cerramos el archivo de datos y retornamos al programa
principal.
f cióse (fpt ) ;
return;
3.3.1.3 SUBRUTINA PARA EL CALCULO DE LOS COEFICIENTES DEL
TERMISTOR.
Definción de variables.
int i ;
Según Riso, la temperatura en grados centígrados esta dada por
la siguiente expresión:
Ln(K) - A- 273.15 + Cl -f C2(R - RS}2 (3.3)
Para determinar las constantes A, B, Cl, C2 y RS; se realizan
los siguientes cálculos:
sr - . _ , .A = • . -- (3.4)
n* st2 - st* st
B « - (3.5)n* st2 - st* st
Donde las variables st ? st'2 , sr y str , almacenan la suma de
temperaturas, resistencias 7 temperaturas al cuadrado y
temperaturas * resistencias de los puntos de calibración. Así:

95
St » ÜÉ.Z
E ti2
Htíri
Estos cálculos se realizan en la subrutina "S()M. Primero
inicializamos las varia.bles st , sr., st2 y str. Luego generamos
un lazo FOR para realizar los sumat crios planteados y
finalmente se calcula el denominador de las ecuaciones 3.4 y
3.5- Este valor se almacena en la variable "pod" y en ningún
caso puede tener un valor igual a cero.
void S ( void )
-C
int i;
st = O; sr = 0; st2 = O; str = O;
for ( i - 0; i < n; i
{
st += tl[i];
sr += rl[i] ;
st2 += tl[i
str += tl[i]#rl[i] ;
pod =
return;
En el caso de que la variable "pod" sea nula (sucede cuando un
punto de calibración está repetido) se despliega un mensaje de

96
error y se regresa al programa principal.
if ( pod -- O )
-C
cprintf( "Error 3 división para cero...\a");
Konec = TRUE;
return;
Luego se calcula las constantes A y B.
A = (st2*sr - st*str)/pod;
B = (n*str - sr#st)/pod;
Se determina la constante RS, que es la resistencia media de
los puntos de calibración.
RS = (r[0]+r[n-l])/2;
Se calcula las temperaturas determinadas con la primera
aproximación? estos valores se almacenan en el array tt[100];
los errores absolutos se almacenen en rl[100]_ También se
calcula el valor de (R-RS)2 y se almacena en ti [100] .
for ( i = O; i < n; i-M- )
-C
tt[i] = B/CrlCi] - A) - 273.15;
rlCi] = t[i] - tt[i];
tlCi] = (r[i] - RS)*(r[i] - RS);
Nuevamente se llama a la subrutina "S( ) " para calcular las
constantes Cl y C2 de la misma manera que A y B.
97
if ( pod == O )
{
cprintf( "Error ? división para cero . . .\a" ) ;
Konec = TRUE;
return;
>
Cl = (st2*sr - st*str)/pod;
C2 =: (n*str - st*sr)/pod;
Se calcula las temperaturas determinadas con la segunda
aproximación estos valores se almacenan en el array td[100] .
También se calcula los errozves de estas aproximaciones y se
almacenan en t2[100] .
for ( i = 0; i < n; i-M- )
{
td[i] = tt[i] + Cl + C2*tl[i];
t2[i] = t[i] - td[i];
3-3.1.4 SUBRUTINA PARA IMPRESIN DE LOS RESULTADOS.
Existen dos subrutinas para impresión de resultados., la primera
imprime los coeficientes del termistor y los arraya utilizados
para los cálculos de dichos coeficientes. La segunda subrutina
imprime la tabla de calibración del termistor de prueba .
La subrutina que imprime los coeficientes de aproximación se
invoca a través del comando "Tisk()"- Esta subrutina envía al

102
3,3.1.5 DIAGRAMA DE BLOQUES DEL PROGRAMA-
RUT I NA PARALECTURA DE DATOS
RUTINA PARA CALCULODE LOS COEFICIENTES
DEL T E R M I S T O R
R U T I N A PARA I M P R E S I Ó NDE LOS PUNTOS DE
CAL I BRAC ION
RUTINA PARA IMPRESIÓNDE LA TABLA DECAL I BPAC ION
3.3.2 PROGRAMA PARA EL MANEJO DE ARCHIVOS.
Este programa fue desarrollado en FOXPRO V2.O, y maneja los
siguientes archivos:
Ejecutables: medir.exe, calibrar.exe, calor.exe.
Inf ormacion: equipo _ txt., progra.txt, ayuda, txt 7 calther.txt P
ecuaci . txt., aplica, txt.

103
Datos: calibrar . dat , medir.dat, canalO . dat,
canall.dat, canal2.dat, canal3.dat, canal4.dat,
canalS _ dat _
El programa inicia limpiando la pantalla y cerrando todos los
ficheros abiertos y selecciona el primer área de trabajo.
También libera cualquier menú activo.
CLEAR
SET TALK OFF
GLOSE ALL
CLEAR ALL
Cuando se edita algún archivo de datos, el programa identifica
el archivo a editar con la variable "ARCHIVO"; por lo tanto
esta variable tiene que ser inicialisada.
ARCHIVO = "
Finalmente se ejecutan los programas que despliega el menú
principal y la pantalla de información.
DO MENU1.MPR
DO PANTA.SPR
3.3.2,1 MENÚ PRINCIPAL.
El programa MENU1.MPR fue generado automáticamente por GENMENU.
Este programa presenta al usuario el menú superior isquierdo
con las siguientes opciones:
AYUDAS SISTEMA TERMISTORES

104
Cuando seleccionamos la opción AYUDAS se despliega el siguiente
submenú:
USO EQUIPO . Muestra la información contenida en el archivo
"equipo.txt" con referencia a la utilización
correcta del equipo.
USO PROGRAMA Muestra la información contenida en el archivo
"progra.txt" con referencia a la utilización
del sistema para medir temperatura y/o calibrar
termistores.
AYUDA RÁPIDA Muestra al usuario las teclas rápidas o macros
disponibles por el sistema. Asi:
Ctrl <£.> Ayudas del egiüj^o ¡ Alt <A> Menú ayudas
Ctrl <'0> Ayudas del programa ' Alt <S> Menú Sistema
Ctrl <M> Medir temperatura ¡ Alt <T-> Menú Termistores
Ctrl <C> Cal i brar termi s tares !
Ctrl <G> Generar tablas de calibración ¡
Ctrl <'//-> Ecuaciones de los tennis tores ,'
Ctrl <Á> Aplicaciones con termistores /
Ctrl <*/-> Información del Sistema /
Ctrl <-£-> Salir del Sistema '
Ctrl <D> Editar archivos X.CVF *'.DAT /
CALTHER VI .O Muestra información general del sistema
CALTHER. Asi:
" C A L T H E R VI. O "
(c) E.P.N. 11 de jimio de 1994 .
Título: Sistema Digital para Calibración de Termistores
Autor: Bdwin Suquillo Guijarro
Director: Ing. Bolívar Ledesma G,

105
Fa cal ta d: Ingeni eria SI éc tri ca
Sspecialización:Slectrónica en Control
Solicitado por: Instituto de Ciencias Nucleares de la
Asistencia técnica: Sdwin Suquillo G.
Dirección: Fernando Dávalos 338 y S. Bernal (La Florida)
Teléfono: (02) 241-143 Quito-Ecuador
Cuando seleccionamos la opción SISTEMA, se presenta al usuario
el siguiente submenú.
MEDIR Ejecuta el programa "medir.exe" (desarrroliado
en TURBO C) que mide la temperatura del canal
seleccionado.
CALIBRAR Ejecuta el programa "calibrar.exe" que
determina los puntos de calibración
(resistencia y temperatura) del tennistor de
prueba.
GENERAR TABLAS Ejecuta el programa "calor.exe" que lee los
puntos de calibración del archivo
"calibrar.dat", determina los coeficientes del
termistor y genera su tabla de calibración
respectiva.
EDITAR ARCHIVOS Permite editar archivos #.DAT con formato DOS.
Por e j emplo el archivo con los puntos de
calibración (calibrar.dat) como también los
archivos con los coeficientes de los
termistores (canaln.dat).
SALIR Sale del sistema.
Cuando seleccionamos la opción TERMISTORES, se presenta al

106
usuario el siguiente submenú.
ECUACIONES Despliega la información contenida en el
archivo "ecuaci.txt" referente a los diferentes
tipos de aproximaciones matemáticas que se
pueden realisar para medir temperatura
utilizando termistores.
APLICACIONES Despliega la información contenida en el
archivo "aplica. txt " referente a aplicaciones
prácticas con los termistores. En especial se
hace referencia a la utilización de los
termistores en el Institxito de Ciencias
Nucleares de la E.P.N.
La definición de ventanas para edición de textos y
visualización de información sigue el siguiente formato
DEFINE WINDOW <nombre ventana>
FROM <filal>,<coll> TO <f ila2>, <co!2>
[TITLE <expC>]
[FOOTER <expC>]
[características]
Las características definen el tipo de ventanas, colores,, etc.
Algunas utilizadas en este programa son;
[DOÜBLE/PANEL/NONE/SYSTEM/<caracter>]
Define el tipo de borde de la ventana
[CLOSE/NOCLOSE]
Permite cerrar una ventana desde el Menú principal o con el
ratón.
[FLOAT/NOFLOAT]

107
Permite que la ventana se pueda mover por la pantalla.
[GROW/NQGROWJ
Permite que pueda modificar el tamaño de la ventana.
[SHADOW/NOSHADOW]
Permite que la ventana que se define tenga sombra.
[ZOOM/NOZOOM]
Permite que se pueda agrandar la ventana hasta cubrir el área
total de la pantalla.
[COLOR/COLOR SCHEME]
Determina los atributos de color de la ventana.
Las ventanas utilizadas en el programa fueron definidas de la
siguiente forma:
DEFINÍ? mM VENTANA1 FROH 4 ,4 TO 20,75 FOOTER "C A L T H E R 1994";
SYSTEH GLOSE FLOAT GROH ZOOH COLOR SOTE 8
DEFINE WINDOtf EQUIPO FROH 4,4 TO 20,75 TITLK "USO DEL EQUIPO";
FÜOTER "C A L T H E R 1994" SYSTEH FLOAT GLOSE ZOOH COLOR SCHEHE 8
DKFIHE mm PROGRAMA FROH 4,4 TO 20,75 TITLK "OSO DEL PROGRAHA";
FOOTSR "C A L T H E R 1994" SYSTEH FLOAT GLOSE Z00tfCOLOR SCHEHK 8
DEFINE HITO AYUDA FROH 4 , 4 TO 20,75 TITLE "AYUDA RÁPIDA";
FOOTER "C A L T H E R 1994" DOUBLE GLOSE COLOR SCRSHE 8
D E F I N E mm ECUACIONES FROH 4,4 TO 20,75 TITLE "ECUACIONES DEL TERHISTOR";
FOOTER "C A L T H E R 1994" SYSTKH FLOAT GLOSE ZOOH COLOR SCHEHK B
DEFINE (íINDOlí APLICACIONES FROH 4,4 TO 20,75 TITLE "APLICACIONES";
FOOTER "C A L T H E R 1994" SYSTKH FLOAT GLOSE ZOOH COLOR SCHEHE 8
DEFINE KINDOH CALTHER FROH 4,9 TO 20,69 TITLS 'INFORHACION";
FOOTER "CALTHSR 1994" DOUBLE GLOSE SHADOíí COLOR SCHEHE 8

108
3.3.2.2 PANTALLA DE INFORMACIÓN.
La pantalla de información muestra los archivos con extensión
#.dat, y son aquellos que pueden ser editados por el programa.
En la parte inferior de la pantalla se muestra un mensaje de
ayuda en forma de menú.
<ALT> Menú <F1> Ayuda <ESC> Salir del programa
Además se muestra información general respecto a la versión del
sistema desarrollado, fecha y lugar de realización.
3_3.2.3 DIAGRAMA DE BLOQUES DEL PROGRAMA.
D E F I N I C 1 D N D ELAS V E N T A N A S DE
T R A B A J O
D E F I N I C I Ó N A U T O M Á T I C ADEL MENÚ P R I N C I P A L
D E F I N I C I Ó N A U T O M Á T I C ADE LA PANTALLA
DE T R A B A J O

JCAEITOLCL4
4.1 PRUEBAS DE FUNCIONAMIENTO.
El sistema CALTHER presenta dos opciones fundamentales., la de
medir la temperatura en un rango entre 10 y 50 °C
aproximadamente con una resolución de 0.01 °C, y la de generar
la tabla de calibración de un termistor en base a puntos de
calibración determinados experimentalrnente. Para, cualquiera de
los dos casos debe existir la comunicación a través de la
interfase serial entre el sistema y el computador .
En este capitulo se analizan las pruebas realizadas para
verificar el correcto funcionamiento del sistema presentando
las guias de operación y mantenimiento. Además se realiza el
análisis técnico económico del mismo.
4.1.1 OPERACIÓN DEL SISTEMA-
El equipo está diseñado para funcionar con una tensión de
alimentación de 120V/60Hz, el encendido se lo realiza mediante
el interruptor SI (ObJ/OFF) ubicado en la parte lateral derecha
el cual se ilumina cuando se encuentra activado en la posición
ON. Las conexiones de los termistores se deben realizar en las
borneras exteriores del equipo, identificando correctamente los
111
4.1.2 MANTENIMIENTO DEL SISTEMA,
Para un funcionamiento adecuado de todo el sistema es necesario
chequear ciertos puntos propensos a daño., los cuales se
describen a continuación.
- Verificar el estado del fusible Fl ubicado al costado
derecho del equipo, el mismo que lo protege de sobre
corrientes en caso de generarse un cortocircuito. Para el
efecto se debe comprobar su continuidad utilizando un
óhmetro. En caso de detectarse alguna anomalía se debe
cambiar por un similar de 220V/0.5A.
— En caso de detectarse anomalías en el funcionamiento de
las fuentes reguladas, primeramente se debe medir el
voltaje a la salida de los puentes rectificadores, es
decir en los capacitores 04,07 y 08 donde se debe tener un
voltaje DC mínimo para el funcionamiento de los
reguladores, caso contrario se debe reemplazar los
capacitores o los puentes rectificadores según sea el
daño. Los voltajes mínimos que se deben tener en los
capacitores cuando los reguladores están con carga son:
CAPACITOR*
C40708
VOLTAJE DC (V)
15-15
Todas las tarjetas están provistas de leds de varios
La ubicación de los diferentes elementos dentro delequipo se encuentran en los anexos 11 y 12.
112
colores que indican el correcto funcionamiento de las
fuentes reguladas, asi:
COLOR DEL LED
rojoverdeamarillo
VOLTAJE
512-12
Todos los circuitos integrados tienen colocados en sus
terminales de polarización capacitores de O.luF, para
garantizar los niveles de polarización y eliminar ruidos
de alta frecuencia que podrían alterar el funcionamiento
de los mismos.
Para comprobar la comunicación entre el equipo y el
computador personal se puede visualizar los pulsos
generados en los pines 2 y 3 del conector DB9 (utilizando
un osciloscopio). Se deben tener señales normalizadas de
trasmisión serial entre +10V y -10V.
Cuando el sistema está midiendo la temperatura, el canal
activo es indicado poz^ el display colocado en la parte
delantera del equipo. El comando de selección del canal es
enviado por el computador personal y codificado por el
microprocesador. Si el display indicador no marca un
número entre O y 5, significa que el computador no envía
el código correcto o que el programa del microprocesador
se ha alterado. En cualquiera de los casos se requiere de
la asistencia técnica calificada para su reparación.
Cuando un canal se encuentra desactivado en la posición

113
OFF, internamente se coloca una resistencia de precisión
de 1K£> simulando la presencia del terrnistor; es decir si
realizamos la medición a través de este canal el
computador personal debe indicar valores de resistencia de
1KQ ± 0.5%; caso contrario el sistema se ha descalibrado.
4.1.3 CALIBRACIÓN DEL SISTEMA.
Para poder utilizar el sistema CALTHER., se calibró cada uno de
los canales analógicos de entrada. Para el efecto se dispuso de
43 valores de resistencias conocidas entre 500 a 2500Q•
aproximadamente, estas resistencias simulaban la acción de los
termistores y fueron colocadas a la entrada de cada uno de los
canales analógicos, tomándose el valor decimal que se obtenía
en el computador.
Con los valores obtenidos se determinó la ecuación que
aproximaba el valor decimal al equivalente en resistencia, para
los cual se siguieron los siguientes pasos:
1. Graficación de las curvas de resistencia y valor decimal
para cada canal, para analizar la linealidad del sistema
(ver anexo 2).
2. Cálculo del polinomio que aproxima la1 curva de valor
decimal a la curva de resistencia, utilizando para el
efecto comandos del programa MATHLAB, existente en el
Laboratorio de Sistemas de Control.
COEF = polyfit (DEC.RES )
Donde:
114
COEF Matriz de coeficientes calculados por el
programa.
DEC Matriz de valores decimales.
RES Matriz de valores reales de resistencia.
n Grado del polinomio a aproximar.
Según las curvas obtenidas, una aproximación de tercer
orden (n - 3) dio magníficos resultados, obteniéndose un
polinomio de la forma:
Res ~ CO + Cl*Dec + C2*Dec* -H C3*Dec®
donde:
C0? Cl, C27 C3 Coeficientes del polinomio
3. Evaluación del polinomio de aproximación:
Raprox = polyval (COEF,DEC)
donde:
Raprox Matris de valores de resistencias
aproximadas
Los coeficientes de los polinomios de aproximación para cada
canal de entrada y la tabla de valores se indican en el
anexo 3. Estos coeficientes son utilizados por el programa que
permite medir la resistencia y la temperatura en el computador
personal.
4.1.4 CALIBRACIÓN DE TERMISTORES.
Para calibrar un termistor se deben seguir los siguientes
pasos:

115
Encender el equipo, mediante el interruptor SI (el
• interruptor se debe iluminar).
- Colocar todos los interruptores que habilitan los canales
de entrada en la posición OFF.
- Verificar la conexión del cable serial entre el sistema y
el computador.
- Colocar en el canal O el termistor patrón número 499 y en
cualquier otro canal el termistor de prueba.
- Colocar los interruptores que habilitan los canales
utilizados en la posición ON.
- Correr el programa principal en el computador personal
mediante el comando C:>\CALTHER-EXE.
- Seleccionar dentro del menú principal la opción SISTEMA y
dentro de esta la opción CALIBRAR, entonces se activa un
subprograma en el que se pide el canal donde está
conectado el termistor de prueba.
A continuación se presenta al usuario varias opciones para
realizar la medición de los puntos de calibración. La
resistencia está dada por el termistor de prueba y la
temperatura por el termistor patrón.
<I> Imprimir: Imprime el valor de resistencia y temperatura
(punto de calibración) en la impresora colocada
en el puerto paralelo del computador, antes de
proceder a activar esta opción se debe
verificar que la impresora se encuentre
encendida y habilitada para recibir
información, de no ser asi se despliega un

116
mensaje de error que indica esta anomalía.
<M> Medir: Mide el valor de resistencia y temperatura y
los despliega en el monitor del computador,
además se indica el error existente entre la
medición actual y la anterior. Para que el
punto de calibración sea adecuado, el error de
la lectura debe ser menor que el 0.1% para lo
cual se debe presionar la tecla <M> por varias
ocasiones hasta conseguir dicho objetivo.
<G> Grabar: Permite almacenar la información de resistencia
y temperatura en el archivo "calibrar, clat" 3
este archivo es utilizado para genera.r las
tablas de calibración- Se recomienda que los
valores almacenados en el archivo tengan un
error porcentual menor al 0.1%.
<S> Salir: Sale del subprograma y retorna al menú
principal.
Para determinar los coeficientes del termistor de prueba y
generar las tablas de calibración se debe activar la opción
GENERAR TABLAS. Se activa un subprogra.ma que pide al usuario la
forma como se van a ingresar los puntos de calibración es decir
mediante teclado o a través del archivo "calibrar.dat". En el
caso de ingresar datos mediante teclado se debe especificar el
número de puntos de calibración a utilizar. Luego se imprime
los coeficientes del termistor y los puntos de prueba tomados
117
para dicho cálculo. A continuación se pregunta al usuario si se
desea imprimir la tabla de calibración, para lo cual se debe
ingresar el valor de resistencia de inicio asi como también el
valor de resistencia final para la tabla. La tabla es generada
con pasos de O.lfi.
4.1.5 MEDICIÓN DE TEMPERATURA.
Para verificar los resultados de la calibración se debe
realizar la medición de temperatura con el termistor calibrado
contrastando estos valores con los del termistor patrón. Para
realizar la medición de temperatura se deben seguir los
siguientes pasos:
- Encender el equipo mediante el interruptor SI (el
interruptor se debe iluminar).í
— Colocar todos los interruptores que habilitan los canales
de entrada en la posición OFF.
- Verificar la conexión del cable serial entz%e el sistema y
el computador.
— Colocar en forma fija los terminales de los termistores en
los canales a ser utilizados. Para evitar contactos
falsos o movimientos durante las pruebas de medición es
preferible que los terminales de los termistores estén
provistos de conectores tipo banana.
- Colocar los interruptores que habilitan los canales
utilizados en la posición ON.
— Correr el programa principal en el computador personal
mediante el comando C:>\E
- Seleccionar dentro del menú principal la opción SISTEMA y

118
dentro de esta la opción MEDIR. Se activa un subprograma
el cual pide al usuario el número del canal que desea
utilizar para realizar la medición.
4.2 RESULTADOS OBTENIDOS.
El funcionamiento del sistema CALTHER fue satisfactorio
mientras se realizaban las pruebas estáticas y dinámicas para
su calibración. Asi también las pruebas de calibración y
medición de temperatura cumplieron los objetivos planteados,
Los resultados del comportamiento estático de cada uno de los
canales de entrada se muestran en los anexos 4,5,6,7,8 y 9
donde se observan las características; resistencia medida vs.
temperatura, precisión vs. temperatura y sensibilidad vs.
temperatura- Además se calcula el rango de entrada de
resistencia y rango de salida de temperatura. Se realiza el
cálculo de valores máximos, valores mínimos y valores medios de
los errores obtenidos, los cuales se presentan a continuación;
a) CANAL O
ta error precisión sensib.ea er E I S
Í'C) ('O (%) (%) CC) (fi/c'C)
VALORES MÁXIMOS: 52.30 0.09235 0.22852 0,17658 0.07136 1.062927ALOKSS MÍNIMOS: 8.14 0.00101 0.01124 0,00193 0.00017 0.153697ALOHES MEDIOS : 23.80 0.02184 0.08962 0.04177 0.01263 0.5898Í
RANGO KNTRADA = 44.16 'CK SALIDA = 1973.13 Q

120
f) CANAL 5
ti error precisión seneib.ea er K K S
Í'C) l'C) (X) (X) Í'C) (Q/c'C)
VALORES HÁXÍMOS: 52.25 0.06746 0.23735 0.12910 0.05217 1.06300VALORES HÍNIHOS: 8.14 0.00015 0.00170 0.00028 0.00002 0.15391VALORES KEDIOS : 23.80 0.01793 0.07852 0.03430 0.00957 0.58981
RANGO ENTRADA - 44.11 'CDK SALIDA = 1972.63 Q
Con los valores máximos y mínimos de temperatura podemos
determinar el rango de operación del sistema. Según los datos
obtenidos la temperatura mínima que el sistema puede medir es
de 8.14°C y.la temperatura máxima de 52.22°C, lo que determina
un rango de 43.08°C.
La tolerancia de los errores cometidos son visualizados mejor
en función de la precisión del sistema. Si observamos el
comportamiento estático del canal analógico 4 (tomado como
ejemplo para la explicación), la precisión varia en forma
creciente y decreciente a medida que se aumenta la temperatura
y los puntos más altos constituyen los que presentan mayor
error en la medición. Según la figura 4.17 el máximo error que
se puede obtener en una medición es del 0.11% de su salida a
fondo de escala (alrededor de los 41°C).
La sensibilidad del equipo representa la variación de
resistencia medida entre un cambio de temperatura expresado en
centésimas de grado centigz^ado, la figura 4.2 muestra esta
característica. La sensibilidad disminuye a medida que
incrementamos la temperatura, sin embargo la menor aensibilidad
que presenta el sistema es de 0.58Q/°C,

121
0.12
0.
10 15 20 25 30 35 40 45 50 551~~L TEMPERATURA MEDIDA tm (°C)
Figura 4.1 Característica Precisión va. Temperatura.
1 ./ n
1-
c?0^7 U. o
s(/)
O c^ -0<Q_JmCO U. 42:LüÍO
.Z
\
\
x
K^^^^• ^^
5 10 15 20 25 30 35 40 45 50 55TEMPERATURA MEDIDA tm (°C)
Figura 4.2 Característica Sensibilidad vs_ Temperatura,

122
Para analizar el comportamiento dinámico del sistema, se
desarrolló un programa en lenguaje' C, el cual tomaba la lectura
de temperatura y almacenaba dicho valor en un archivo.
Este archivo con la ayuda del QPRO V4.0-, permitió obtener la
característica temperatura vs. tiempo y así determinar los
tiempos que caracterizan el comportamiento dinámico del
sistema.
Para medir la temperatura se utilizó el termistor patrón 499 en
el canal de entrada T4, para generar el incremento de
temperatura se llevó el termistor de la temperatura ambiente a
la temperatura corporal. Los resultados obtenido fueron los
siguientes:
Tiempo de crecimiento: tr (5 - 95%) = 1.4 s
tr (10 -90%) = 1.1 s
Tiempo de respuesta: ts (2%) = 2.0 s
ts (5%) = 1.8 s
Tiempo de retardo: td = 1.1 s
Para garantizar los resultados obtenidos y mejorar el
comportamiento dinámico, se tomó varias muestras y se realizó
un promedio, así para 10 muestras los resultados son los
siguientes:
tr (5 - 95%) = 1.7 s
tr (10 -90%) - 1.3 s
ts (2%) = 1.8 s
ts (5%) = 1,5 s
td - 0,7 s

123
Para analizar los resultados indicados veamos la curva
característica Temperatura vs. Tiempo que se muestra en la
figura 4.3. En ella se indica en número de muestras (n)
tomadas para realizar el promedio. El tiempo de respuesta
depende directamente de la velocidad que tiene el computador
personal para realizar las operaciones de adquisición de datos
y procesamiento de los mismos. Durante las pruebas realizadas
se utilizó un computador tipo XT de 8Mhz de velocidad, sin
embargo el sistema va a ser instalado para trabajar con un
computador marca IBM de 25 Mhz (Instituto de Ciencias Nucleares
de la EPN.) de velocidad lo cual mejorará el comportamiento
dinámico del sistema.
60Tiempo (s)
80 100 120
Figura 4_3 Característica Temperatura- vs_ Tiempon: número de muestras promediadas„
Los datos fueron evaluados utilizando el paquete QPRO V4,0. Se
determinó los tiempos que definen el comportamiento dinámico,
el más importante es el tiempo de crecimiento que está

124
alrededor de 2 segundos., si el gradiente de temperatura
incrementado es de 18 °C aproximadamente la velocidad de
respuesta es de 9°C/seg. La velocidad de respuesta disminuye
si aumentamos el número de muestras.
La tabla de valores de los resultados obtenidos y la
característica temperatura vs. tiempo se muestran en el
anexo 10,
4.3 ANÁLISIS TÉCNICO ECONÓMICO.
4.3.1 ESPECIFICACIONES TÉCNICAS.
Todas las características que a continuación se especifican
tienen relación con el equipo construido, tomando en cuenta que
el mismo constituye en si un medidor de temperatura con
interfaz serial hacia un computador personal IBM o compatible.
a) Mediciones
rango de medición:
precisión
sensibilidad:
resolución analógica:
resolución digital:
10 A 50°C
@ 20 °C 0.036% ± 0.01°C
0.56 Q/c°C
1.07 c°C
12 bits
b) Entrada
sensor:
forma:
modelo:
termistor
perla
P32N80

fabricante:
125
Corporación de Ing. Victoria.
b) Eléctricas
Alimentación:
frecuencia:
120 VAC (fase, neutro, tierra)
60 Hz
c) Transmisión serial
Protocolo:
Conector PC:
Conector CALTHER:
baudrate:
RS-232c
DB25 macho
DB9 macho
9600 baudios
c) Varios
Dimensiones:
Accesorios:
0.2x0.3x0.2 mts.
Computador IBM o compatible
Cable de comunicación
4.3.2 ANÁLISIS TÉCNICO.
El sistema construido cumple con las especificaciones
solicitadas por el Instituto de Ciencias Nucleares de la E.P.N.
Sin embargo para satisfacer dicha solicitud, se debió emplea'r
elementos de alta precisión, en lo posible inmunes a efectos
ambientales y disponibles en el mer'cado local.
El sistema se alimenta con señal alterna de 110V/60Hz a través
de un filtro que elimina desde la entrada posibles ruidos
eléctricos que vengan con la linea de alimentación.
126
Kn las fuentes de polarización se han colocado filtros
capacitivos tanto a la entrada corno a la salida, de modo que
las variaciones de tensión disminuyan al ±1%. Iterante las
pruebas del sistema, éste ha trabajado en forma continua en
periodos de hasta 5 horas, sin que se presenten problemas en
las fuentes de polarización.
El sistema dispone de dip-switch internos para habilitar un
determinado canal analógico de entrada, asi se protege la
circuiteria interna del equipo en caso de no ser utilizado en
toda su capacidad; es decir con seis termistores al mismo
tiempo. Además se dispone de interruptores ObJ/OFF para cada
canal de modo que se facilita la instalación y retiro de los
termistores., asi el equipo en ningún momento se queda sin carga
a la entrada.
Se dispone de un pulsante de reset en la parte delantera del
equipo, así en caso de que el sistema entre en un laso cerrado
infinito, no hay necesidad de apagar y encender nuevamente el
equipo, sino que solamente se debe presionaz^ el pulsante
indicado e iniciallzar el software del computador personal.
La interfaz implementada ha trabajado en forma exitosa durante
las pruebas de adquisición de datos realizadas. Para este
efecto se ha utilizado un computador marca Packard Bell XT y
también un computado!1 marca Intel AT286.
Para el diseño del circuito impreso se utilizaron básicamente
dos paquetes de software: ORCAD de OrCAD System Corporation,
127
para elaborar los diagramas circuitales y TANGO de ACCEL
Tecnologías para elaborar los diagramas del circuito impreso.
Todos los diagramas del sistema se muestran en los anexos 11
y 12.
Todos los circuitos integrados tienen en sus pines de
polarización capacitores de . luF para eliminar señales de ruido
y además están provistos de sócalos, lo cual facilita su
reemplazo en caso de daños. La tarjeta de adquisición de datos
es la única que se realizó a doble lado por la gran cantidad de
caminos que se debían interconectar.
4.3-3 ANÁLISIS ECONÓMICO.
A continuación se realiza un listado de materiales utilizados
en la construcción del equipo con el valor aproximado en
dólares.2
ítem Cantidad Referencia Parte Costo US$
1
2
3
4
5
6
3
3
6
21
2
1
C4?C77C8
C57C6?C9
6C10
6C11,6C12,C13,C14,C15;C16,C17,CÍ8,C25,C26,C27
C19,C20
C21.
lmF/25V
47uF/25V
150uF/16V
,luF
20pF
10uF/25V
3.3
0.9
0,6
2.1
0.8
0,2
2E1 valor en dólares fue tomado del catálogo de componenteselectrónicos de JAMECO de 1994. Para los componentes adquiridosen el mercado local, se calcxiló el valor en dólares en base a lacotización de abril de 1994 que es de 2.200 sucres.

128
ítem Cantidad Referencia Parte Costo US$
7
8
9
10
11 •
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
1
2
1
1
12
7
1
1
28
1
1
7
12
12
6
9
14
6
1
1
1
1
1
1
1
1
6
C22
C23,C24
CON1
OON2
DI, 02, 03, 608, D9, 010,011
604,07
05
06
6014,6015,6016,6017,018,019,20,021
DISP1.
Fl
6P1,P4
6P2,6P5
6R5,6R6
6P3
R1,RPACK1,R14
R2,R3,R7,R8,R9?R12,R15,R16,6R18
6R4
RIO
Rll
R13
RECT1
RECT2
SI
SW1
SW2
6SW3
12pF
4,7uF/100V
COLECTOR DB9
CONECTOR DB2
LEO
LM336.50
1N4148
5. IV
1N695A
CSS-514E
1.5A
100K
10K
10K
200
330
1K
470K
150K
1M
2K
NTE166
TW10M
ON/OFF
OPEN
DIP-SW8
SW 2POS
0.4
0.4
1.0
1.2
4.8
7.0
1.1
1.0
14.0
5.0
0.5
7.0
12.0
1.2
7.0
1.0
1.4
1.4
0.1
0.1
0.1
2.0
1.0
2.0
1.0
2.0
6.0

129
ítem Cantidad Referencia Parte Costo US$
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
1
1
1
1
1
6
6
1
1
1
1
1
1
1
1
12
12
4
2
1
1
5
7
1
6
1
TI
T2
Ul
U2
U3 -
6U4
6U5
Ü6
U7
IJ8
U9
U10
Ull
U12
Yl
8 FINES
12 FINES
14 FINES
16 FINES
24 FINES
40 FINES
8PINES
12 FINES
RS232C
PCB
GABINETE METÁLICO
n=12,10W
n=7,8W
UA7805C
LM340T 12
Ü1320T-12
LH0036CG
LF351N
D8751H
MC1488P
DM74LS14N
NTE4051B
ADC1210HCD
7447APC
74LS04N
7.3728MHz
ZÓCALOS
ZÓCALOS
ZÓCALOS
ZÓCALOS
ZÓCALOS
ZÓCALOS
CONECTORES
CONECTORES
CABLE
TARJETAS
10,0
8.0
1.0
1.0
1.0
105.0
11.5
30.0
2.0
2,0
3.5
45.0
1.0
1.0
2,5
30.0
3.0
4.0
2.0
5.0
5.0
10.0
15.0
8.5
50.0
35.0
T O T A L $. 481.6

130
El costo del equipo está en relación directa con las
características de precisión y resolución que el mismo
presenta. Tomando en cuenta que va a trabajar en conjunto con
elementos de elevado costo3 y en ambientes radioactivos, se
justifica la utilización de elementos de calidad par-a su
construcción.
Las diferentes tarjetas del circuito implementadas en el equipo
fueron realizadas tratando de optimizar el espacio físico, de
manera que el tamaño global del equipo disminuya y los costos
lo hagan de igual manera.
Termístor tipo perla P32N80 utilizado como patrón enel sistema CALTHER cuesta alrededor de 300 dólares.
5.1 DISCUSIÓN DE LOS RESULTADOS OBTENIDOS.
El sistema fue construido a petición del Instituto de Ciencias
Nucleares de la Escuela Politécnica Nacional, imponiendo las
especificaciones técnicas deseadas para el equipo. En especial
se solicitó una resolución de centésimas de grado centígrado lo
cual constituyó el mayor punto de interés y dificultad para el
diseño. A continuación se realiza una evaluación de los
resultados obtenidos, comparándolos con las características
planteadas al inicio del diseno del sistema.
De los resultados del comportamiento estático del sistema se
determina el rango de trabajo en aproximadamente 43°C, lo que
determina una resolución de 44°C/4096 = 0.0107°C. Presenta una
precisión pico máxima de O.Q7°C para temperaturas inferiores a
los 35 °C. La sensibilidad es mayor que 0. 2£2/c°C para valores
inferiores a los 45°C. Todas estas características garantizan
el funcionamiento del sistema dentro de los márgenes de error,
cumpliendo con las especificaciones solicitadas.
Pero veamos algunas virtudes particulares que presentan ciertos
puntos de trabajo, que pueden ser considerados como ideales en
un proceso de medición. Observando el comportamiento estático

132
del equipo los errores de medida aumentan en forma oscilante
con el inci-emento de temperatura, es decir existen puntos donde
el error es mínimo. Por ejemplo., para t = 15.26°C el error de
medición es de 0.001°C lo cual implica -una precisión de
0.003°C. Estos puntos deben ser tomados preferencialmente como
puntos de calibración para la determinación de los coeficientes
de un termistor.
La sensibilidad del sistema disminuye de 1.06 a 0.58 fí/c°C a
medida que se incrementa la temperatura de 8 a 52°C. Por lo
tanto es preferible tomar mayor puntos de calibración a
temperaturas bajas.
La velocidad de respuesta del sistema es de 9°C/seg, es decir,
si el termistor detecta una variación de temperatura de 9
grados centígrados el sistema se demora 1 segundo en visualizar
esta variación. La alta velocidad de respuesta del sistema
está dada por la calidad de los termistores utilizados y por la
velocidad de procesamiento de información tanto en el
microprocesador como en el computador personal.
Todos los programas desarrollados para el procesamiento de
datos fueron realisados en Lenguaje C. Se desarrolló un
programa administrador de archivos utilizando las ayudas del
FOXPRO V2.0. De esta manera se desarrolló un sistema "amigo al
usuario" que despliega mensajes de ayuda, errores e indica la
actividad en la cual se encuentra el sistema.
Los programas realizan los cálculos utilizando números de punto

133
flotante1, incrementando la precisión en el procesamiento de
información.
Luego de las pruebas realizadas para el análisis estático,
análisis dinámico, funcionamiento de equipo, funcionamiento del
software tanto en el microcontrolador como en el computador, se
puede afirmar que el sistema opera satisfactoriamente y que
cumplió con los objetivos prepuestos.
5.2 CONCLUSIONES.
Para garantizar que la variación de resistencia medida en un
termistor sea debida única y exclusivamente a la variación de
temperatura, la corriente que circula por el termistor debe ser
constante y menor que lOOuA. El sistema CALTHER utiliza una
fuente de corriente de lOuA diseñada en base a amplificadores
operacionales. Con este nivel de corriente se garantiza una
disipación de calor mínima por efecto del I2R.
El voltaje generado en los terminales de un termistor debe ser
amplificado en forma diferencial? es decir, ningún terminal del
sensor conectado a tierra. De esta forma se evita el efecto de
posibles señales de ruido que viajan por la tierra del sistema.
Además se debe utilizar amplificadores de instrumentación con
el objeto de obtener la máxima relación de rechazo en modo
común y reducir al mínimo el voltaj e de offset ? puesto que
estos efectos propios de una amplificación, influeyen
Número de punto flotante: número que incluye puntodecimal y/o exponente y ocupa 1 palabra ~ 4 bytes enmemoria.

134
negativamente en la señal analógica amplificada.
Para garantizar una buena repetibilidad en las mediciones, los
voltajes de referencia de las fuentes de corriente y del
conversor A/D., deben ser precisos y no deben alterarse por los
cambios inesperados que sxifre la red de alimentación ni tampoco
por los cambios ambientales de temperatura. Por lo tanto los
circuitos que generen los voltajes de referencia deben tener
una alta estabilidad térmica- Por ejemplo el elemento LM336
5. OV presenta un baj o coeficiente de temperatura y una alta
estabilidad térmica en un rango de trabajo de O a 70 0.s
Para obtener una resolución de centésimas de grado centígrado
en un rango entre 10 y 50 grados centígrados., se debe utilizar
un conversor A/D de mínimo 12 bits. Si las posibilidades
económicas y de mercado lo permiten, se puede utilisar un
conversor A/D de 13 bits, donde los 12 bits más significativos
corresponderían al dato digitalizado y el último bit se#
mantendría oscilante y no se lo utilizaría.
La utilización del computador personal para el procesamiento de
datos presenta las siguientes ventajas: realizar cálculos
complejos con exactitud y gran velocidad, fácil programa.ción.,
almacenamiento de datos en unidades de disco duro o disco
flexible permitiendo transportar la información de un
computador a otro para su posterior análisis. Todas estas
características garantizan la conflabilidad del sistema.
• Véase Apéndice 2. Especificaciones técnicas delLM336 5.0V de National Semiconductor,

136
1.- Verificar las conexiones de alimentación y comunicación
entre el computador personal, impresora y equipo .
2.- Encender el computador y la impresora.
3.- Encender el equipo CALTHER y presionar el botón RESET para
garantizar la inicialización correcta del tnicroprocesador.
4.™ Correr el programa principal en el computador. Dentro del
mismo se presentan las ayudan de operación del sistema.
Mientras se esté utilizando el sistema para medir la
temperatura o generar las tablas de calibración, no se debe
apagar ni el equipo ni la impresora, pues estas acciones
generan errores en el software que pueden ocasionar lazos
infinitos sin control.
Cuando se esté tomando puntos de calibración9 estos no deben
estar cerca de los limites del rango de medida es decir a los
8°C o a los 52°C. Es preferible que los puntos de calibración
se encuentren esparcidos en todo el rango de medida y no más de
100 puntos (depende de la capacidad de memoria RAM que tenga el
computador personal)_
Tomando en cuenta la precisión y sensibilidad de las medidas,
se recomienda que los puntos de calibración sean tomados a
temperaturas inferiores a los 45°C.
El canal T4 presenta el menor margen de error y
consecuentemente una mayor precisión de medida en las lecturas,
es por ello que se recomienda la utilización del mismo en
preferencia a los otros canales de medida.

137
Si se reemplaza algún componente cíe las tarjetas de
acondicionamiento de señal, las condiciones de operación de
dicho canal se alteran, obligándose a la recalitaración del
mismo.
Cualquier ajuste de calibración, cambio de elementos, cambio de
software, debe ser realizado por personal técnicamente
calificado que conozca el funcionamiento del sistema.
Se debe incentivar la realización de trabajos prácticos,
orientados a la calibración de otros tipos de sensores para
medición de cualquier tipo de magnitud y sin necesidad de
requerirse una resolución muy baja, de esta forma se disminuyen
los costos y se generaliza su utilización.

BIBLIOGRAFÍA
1.- OGATA KATSUHIKO, "Ingeniería de Control Moderna",
Prentice-Hall Internacional, USA, 1974.
2.- HARRY N- NORTON, "Sensores y Analizadores", Gustavo Gili
S.A., Barcelona, 1984,
3.- ANTONIO CREUS SOLÉ, "Instrumentación Industrial", 4ta.
edición, Macornbo S. A. , Barcelona-España, 1989 .
4.- ADOLFO GONZALES V_ , "Introducción a los Microcontroladores
Hardware, software y aplicaciones", McGraw-Hill, Madrid-
Espafía, 1992.
5.- MORRIS MANO, "Lógica digital y diseño de Computadores",
Prentice-Hall Hispanoamericana S.A., México, 1982.
6.- HELENA VASS, "Mediciones Eléctricas", Colección E.P.N.,
Quito-Ecuador 3 1979.
7. - BYRON S. GOTTFRIED, "Programación en C", McGraw-Hill
Interamericana de México S.A.; México, 1991.
8.- JOSÉ MOMPIN POBLET, "Interconección de periféricos a
Microprocesadores", Macombo, Barcelona-México, 1983.

ANEXOS

140
El sistema CALTHER se alimenta de una red monofásica de
110 Vrms/ 60 Hs con conexión a tierra. Con el propósito de
eliminar perturbaciones de la red, se coloca un filtro de linea
a la entrada del equipo, además el sistema x^equiere para
polarizar los diferentes componentes de fuentes reguladas de
+5 V, -1-12 V y -12 V, tal como se indica en la figura Al.l.
F U K N T ES DE P O l - A P l Z A C I O H
Figura Al-1 Diagrama de bloques del circuito dealimentación y fuentes de polarización del sistemaCALTHER.
1.1 FUENTES DE POLARIZACIÓN.
Para el diseño de una fuente de polarización se siguen los
siguientes pasos:
1.- Determinar el consumo máximo de corriente (lom* ) que la
fuente regulada va a entregar, para los cual se suman los
respectivos valores de corriente máxima (Icemos) de cada
elemento utilisado. Sin embargo este valor es ideal, pues
nunca van a estar funcionando todos los elementos al mismo
tiempo, ni tampoco todos ellos van a estar consumiendo su

141
máximo valor de corriente. Por ello se sugiere colocar un
amperímetro en serie entre la fuente regulada y la máxima
carga que va a alimentar, determinando asi el consumo
máximo de corriente en forma experimental; este valor se
aumenta un 10% por seguridad.
2 . - Se elige el regulador de voltaje adecuado que satisfaga
los requerimientos de corriente máxima y que su salida no
sobrepase el 5% de error. Los reguladores de voltaje deben
ir acompañados de filtros tanto a la entrada como a la
salida.
3_- Con el dato de corriente máxima que va a entregar el
regulador, también se elige el tipo de rectificador que se
va a utilizar.
4.- Diseñar el transformador que va a alimentar el
rectificador, es decir* calcular la relación de
transformación y potencia.
Con el objeto de generar la mínima disipación de calor1, se
calcula la máxima relación de transformación (nm«jc) en función
de los mínimos voltajes requeridos.
(AI. 2)
vsrms

Vsrms
145
11012
=9.17 V
Po - 1 * 9.17 - 9.17 W - 10
5.- La máxima potencia cíe disipación del regulador determinada
por las ecuaciones Al. 6, Al. 7 y Al. 8 es:
Vsp = 9.17
V±DC
12.96 V
- 1.2) * 0.8 = 9.41 V
- 5) * 0,88 = 5. O
6.- Se considera necesario la utilización de un disipador1 de
calor tipo ECG402 con RB = 17°C/W
1.3 FUENTES REGULADAS DE +12 V Y -12 V.
U3LU32DT--12
Figura Al. 3 Diagrama. esquemático de la fuente depolarización de +12 V y —12 V.
Tanto la fuente de +12 V como la de -12 V utilizan el mismo
rectificador y transformador, razón por la cual su diseño se lo
realiza en conjunto, además los cálculos y mediciones se los
realizó en forma análoga al caso anterior, obteniéndose los

146
siguientes resultados :
1.- loma^ (-+12V) - 200 mA * 1.1 ~ 220 mA.
(-12V) = 150 mA * 1.1 = 165 mA.
2 . - Regulador de volt a j e LM340T 12 ( U2 ) que genera a su.
salida un voltaje de 12 V ± 5% con capacidad de corriente
de 1 A. Regulador de voltaje LM32QT-12 (Ü3) que genera a
su salida un voltaje de -12V ± 5% con capacidad de
corriente de 1 A .
C7 = CB = 1 mF/ 25 V, para proporcionar un rizado
* aceptable a la entrada del regulador.
C6 = C9 = 47 uF/ 25 V., para garantizar un voltaje DO puro
a la salida del regulador .
C26 - C27 - 0.1 uF, para mejorar la respuesta transitoria.
3.- Rectificador tipo puente TW10M con capacidad de corriente
* de 1.5 A.
4.- Relación de transformación n:
Vsp = (14-í- 1.2) * 1.2 - 18.24 V
110 8.53- 9m&A 12.90
Considerando márgenes de seguridad, se tornó una relación de
transformación n = 7.
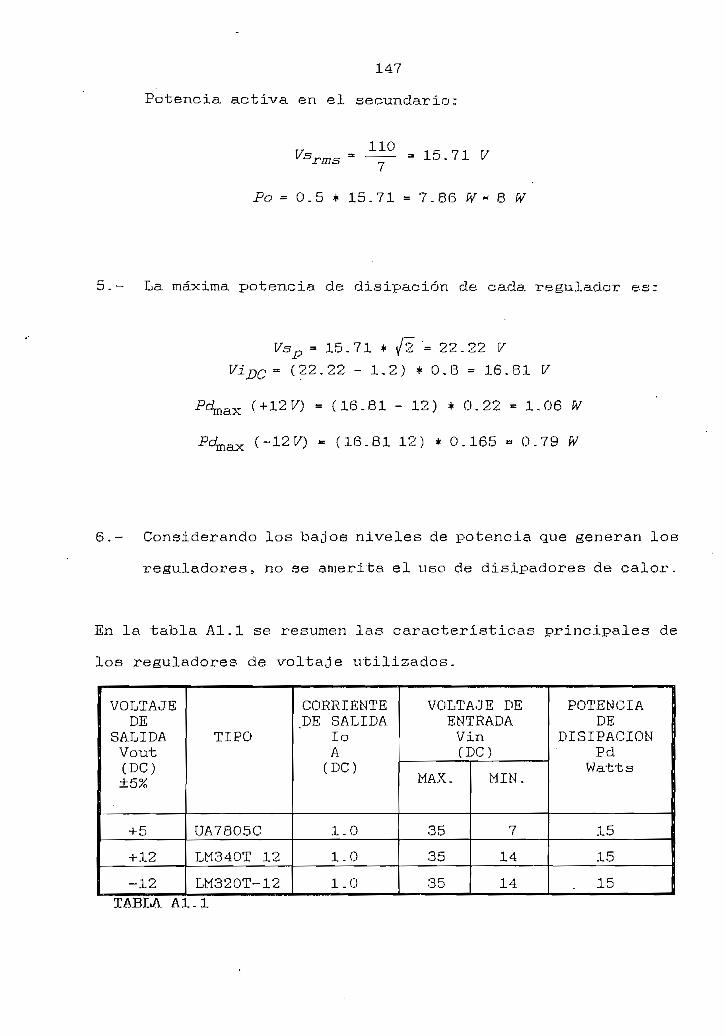
147
Potencia activa en el secundario:
110Jrms 15.71 V
Po - 0,5 * 15.71 = 7.86 W - 8 W
5.- La máxima potencia de disipación de cada regulador es:
*P 15,71 * = 22.22 V
V±DC= (22.22 - 1.2) * 0.6 = 16.81 V
Pdmax (+12I/) = (16.81 - 12) * 0.22 = 1.06 W
("121/) - (16.81 12) * 0.165 - 0.79 W
6,- Considerando los bajos niveles de potencia que generan los
reguladores, no se amerita el uso de disipadores de calor.
En la tabla Al.1 se resumen las caracteristicas principales de
los reguladores de voltaje utilizados.
VOLTAJEDE
SALIDAVout(DC)±5%
-4-5
+ 12
-12
TIPO
UA7S05C
LM34QT 12
LM320T-12
CORRIENTEDE SALIDA
loA(DC)
1.0
1.0
1.0
VOLTAJE DEENTRADAVin(DC)
MAX.
35
35
35
MIN,
7
14
14
POTENCIADE
DISIPACIÓNPdWatts
15
15
. 15TABLA Al.l
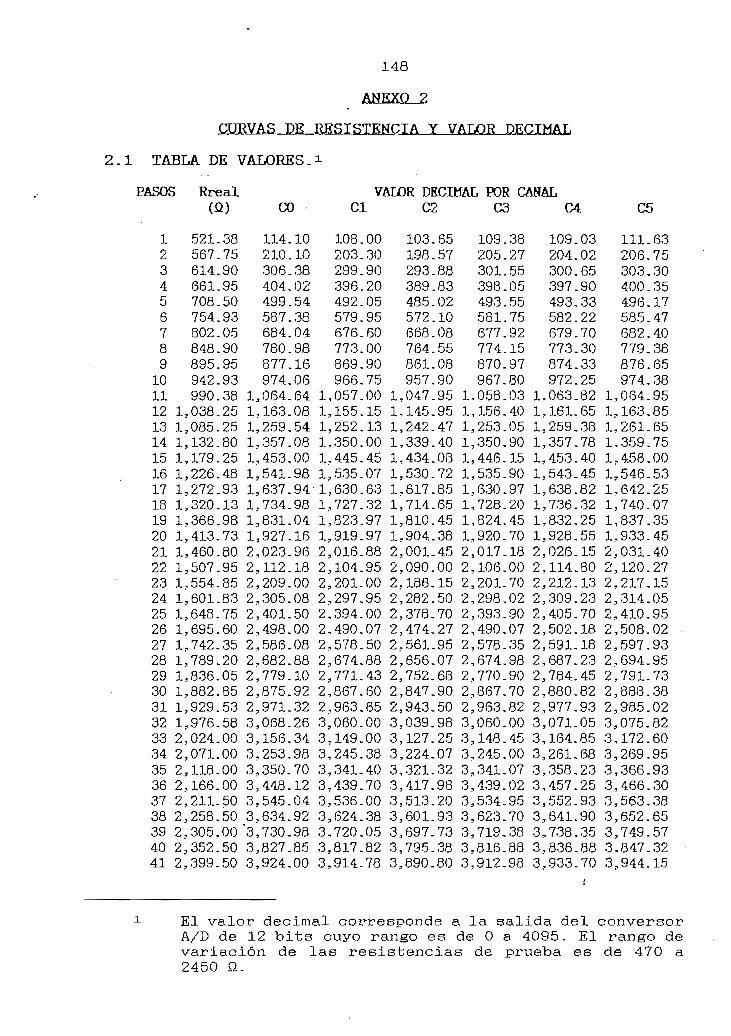
148
CURVAS DE RESISTENCIA Y VALOR DECIMAL
A DE VALORES. i
Rreal(fi)
521.38567.75614.90661.95708.50754.93802.05848.90895.95942.93
VALOR DECIMAL POR CANALCO
114.10210.10306.38404,02499.54587.38684.04780.98877.16974.06
Cl
108.00203.30299.90396.20492.05579.95676.60773.00869,90966.75
C2
103.65198.57293.88389.83485.02572.10668.08764.55861.08957.90
C3
109.38205.27301.55398.05493.55581.75677.92774.15870.97967.80
C4
109.03204.02300.65397.90493.33582.22679.70773.30874.33972.25
C5
111,63206.75303.30400.354.96.17585.47682.40779,38876.65974.38
PASOS
123456789
1011 990.38 1,064.64 1,057,00 1,047.95 1,058.03 1,063.82 1,064.9512 1,038.25 1,163.08 1,155.15 1,145.95 1,156.40 1,161.65 1,163.8513 1,085.25 1,259.54 1,252.13 1,242.47 1,253.05 1,259,38 1,261,6514 1,132.80 1,357.08 1,350.00 1,339.40 1,350.90 1,357.76 1,359-7515 1,179.25 1,453.00 1,445.45 1,434.08 1,446.15 1,453.40 1,456.0016 1,226.48 1,541.98 1,535.07 1,530.72 1,535.90 1,543.45 1,546.5317 1,272.93 1,637.94 1,630.63 1,617.85 1,630.97 1,638.82 1,642.2518 1,320.13 1?734.98 1,727.32 1,714.65 1,728.20 1,736.32 1,740.0719 1,366.98 1,831.04 1,823.97 1,810.45 1,824.45 1,832,25 1,837.3520 1,413.73 1,927.16 1,919.97 1,904.38 1,920.70 1,928.55 1,933.4521 1,460.80 2,023.96 2,016.88 2,001.45 2,017.18 2,026.15 2,031.4022 1,507.95 2,112.18 2,104,95 2,090.00 2,106.00 2,114.80 2,120.2723 1,554.85 2,209.00 2,201.00 2,186.15 2,201.70 2,212.13 2,217,1524 1,601.83 2,305,08 2,297.95 2,282.50 2,298.02 2,309.23 2,314.0525 1,648.75 2,401.50 2,394.00 2,378,70 2,393.90 2,405.70 2,410.9526 1,695.60 2,498,00 2,490.07 2,474.27 2,490.07 2,502.18 2,508.0227 1,742.35 2,586.08 2,578.50 2,561.95 2,578.35 2,591,18 2,597.9328 1,789.20 2,682.88 2,674.88 2,656.07 2,674.98 2,687.23 2,694-9529 1,836.05 2,779,10 2,771.43 2,752.68 2,770.90 2,784.45 2,791.7330 1,882.85 2,875.92 2,867.60 2,847.90 2,867.70 2,880.82 2,888.3831 1,929.53 2,971.32 2,963.65 2,943.50 2,963.82 2,977.93 2,985.0232 1,976.58 3,068.26 3,060.00 3,039,98 3,060.00 3,071,05 3,075.8233 2,024.00 3,156.34 3,149.00 3,127.25 3,148.45 3,164.85 3,172.6034 2,071.00 3,253.98 3,245.38 3,224.07 3,245.00 3,261.68 3,269.9535 2,118.00 3,350.70 3,341-40 3,321.32 3,341.07 3,358,23 3,366.9336 2,166.00 3,448.12 3,439.70 3,417.98 3,439.02 3,457.25 3,466.3037 2,211.50 3,545.04 3,536.00 3,513,20 3,534-95 3,552.93 3,563.3838 2,258.50 3,634.92 3,624.38 3,601.93 3,623,70 3,641.90 3,652.6539 2,305.00'3,730.98 3,720.05 3,697.73 3,719.38 3,738.35 3,749-5740 2,352.50 3,827.85 3,817.82 3,795.38 3,816.88 3,836.88 3,847.3241 2,399.50 3,924.00 3,914.78 3,890.80 3,912,98 3,933.70 3,944.15
El valor decimal corresponde a la salida del conversorA/D de 12 bits cuyo rango es de O a 4095. El z^ango devariación de las resistencias de prueba es de 470 a2450 Q.

149
2.2 CANAL CERO (O),
i ^nn4DUU
4UUU
x^nn -oouu
7 n nn -ouuu
o R AH _Z j(J(J
9 nnn -¿UUU
1500-
1000-
c;n^ -OUU^~-
^
•
-^
^¿¿.
0 5 10 1
KLSIS. REA
^-^
^^__.
^
^^
/s*
^^
^^
^-
^
^^
5 20 25 30 35 40 45PASOS
L /n\ . - \! A I í*^^ VALt.)R DECIMAL 1
2,3 CANAL UNO (1)_
4000
3500
3000
2500
2000
1000
0"
RESI5. REAL (Q) VALOR DECIMAL j

150
2.4 CANAL DOS (2).
¿nrm-i*f U U w
T en n „oDUU
Tnnn -oUUU
o en A _Z JUU
o nnn -/UUU
1 trnr\1 OUU
1 nnn -I UUU
C ^ A A -JUU ^x^^
/¿//
/X
/^
^-^
/S
^^
^^
/
~^~
0 5 10 15 20 25 30 35 40 45PASOS
\t SIS. REA (S2J VALC)R DECIMAL 1
2.5 CANAL TRES (3),
¿SnnT-U U W
A An A -i4UUU ^
•7 c nn „óüUU
oUUU
•9 AA/OUU
n A AA _/UUU
1 c;nn J1 OUU
1000r
C A ÁoUU
04 1 1 1 1 1 i 1 r —
_ -
^
^^^¿.
^/-^
/
/s
[^^
/s-
^
^x*1
^ '
^
^^~~
0 5 10 15 20 25 30 35 40 45PASOS
KLSIS. REA (.nj VALC.)R DECIMAL 1

151
2.6 CANAL CUATRO (4),
4500
4000
3000
2000
1500
1000
15 20 25PASOS
30 35
RESIS, REAL - VALOR DECIMAL
40 45
2.7 CANAL CINCO (5)_
4500
4000
3500
3000
2500
2000
1500
1000
500
10 15 20 25PASOS
30 35
RESIS. REAL (Q) VALOR DECIMAL
40 45

152
DETERMINACIN DEL POLINOMIO DE . APRQyiMA_QT_QlS_
^
El polinomio de tercer orden que aproxima la curva de valor
decimal a la curva de resistencia real (ver tabla de valores
del ANEXO 2) es de la forma:
Raprox. = 00 + Cl*Dec -f C2#Dec2 + C3*Dec3
Donde los coeficientes C0? Cl? 02 y C3, como también la
evaluación del polinomio para cada uno de los canales
analógicos se realiza con el programa PC-MATLAB. Los valores de
resistencia aproximados por el programa se muestran al final de
este anexo .
3.1 CANAL CERO (O).
>COEFO = polyfit (CO,Rreal,3)
>COEFO = [-3.5113e-010? 2.0792e-0067 4.9023e-001, 4.6497e+002]
>RO - polyval (COEFO?CO)
3.2 CANAL UNO (1)
>COEF1 = polyfit (Cl,Rreal,3)
>COEF1 = [-2.3752e-010? 1.4821e-006, 4.9l30e-001, 4 . 6802e-(-002]
>R1 - polyval (CQEF1,C1)
3.3 CANAL DOS (2).
>COEF2 = polyfit (C2,Rreal,3)
>COEF2 = [-3.5636e-010, 2-2115e-006, 4.9264e-001, 4.7038e+002]
>R2 = polyval (COEF27C2)

153
3.4 CANAL TRES (3).
>COEF3 - polyfit (C3,Rreal,3)
>COEF3 = [-2.35786-010, 1.5347e-006y 4.9141e-001, 4.6730e+002]
>R3 = polyval (COEF3,C3)
3.5 CANAL CUATRO (4).
>COEF4 =.polyfit (C4,Rreal,3)
>COEF4 = [-2.9328e-010, 1.8404e-006, 4.8831e-OQl, 4.6823e+002J
>R4 = polyval (CGEF4,C4)
3.6 CANAL CINCO (5),
>COEF5 = polyfit (C5,Rreal,3)
>COEF5 = [-2.31566-010, 1.16426-006, 4,8902e-001, 4.6681e+002]
>R5 = polyval (COEF5,C5)
3.7 TABLA DE VALORES.
PASOS Rreal VALOR DE RESISTENCIA APROXIMADA POR CANAL (Q)(fi) RO . Rl R2 R3 R4 R5
0 474.25 473,31 473.80 474.21 473.27 474.43 474.001 521.38 520.93 521.11 521.48 521.07 521.50 521.422 567.75 568.06 567.97 568.30 568.24 567.93 567.973 614.90 615.35 615.50 615.35 615.62 615,20 615.244 661.95 663.35 662.90 662.75 663.14 662.81 662.775 708.50 710.34 710.11 709.81 710.19 709.55 709.716 754.93 753.57 753.41 752.89 753.66 753.11 753.487 802.05 801.17 801.05 800,40 801.07 800.90 801.008 848.90 848.93 848.58 848.17 848.54 846.81 848.559 895.95 896.34 896.38 896.01 896.32 896.39 896.2610 942.93 944.13 944.17 944.01 944.12 944.47 944,2111 990.38 988.82 988.71 988.68 988.67 989.44 988.6512 1,038.25 1,037.41 1,037.17 1,037.30 1,037.26 1,037.51 1,037.1813 1,085.25 1,085.03 1,085.06 1,085.22 1,085.02 1,085.54 1,085.1914 1,132.80 1,133.20 1,133.41 1,133.35 1,133,38 1,133.91 1,133.3415 1,179.25 1,180.59 1,180.56 1,180.38 1,180.46 1,180.93 1,180.5916 1,226.48 1,224.55 1,224.85 1,228.40 1,224.83 1,225.23 1,225.0417 1,272.93 1,271.97 1,272.07 1,271.69 1,271.85 1,272.14 1,272.0418 1,320.13 1,319.94 1,319.87 1,319.81 1,319.93 1,320.11 1,320.0619 1,366.98 1,367.42 1,367.64 1,367.43 1,367.54 1,367.32 1,367.8220 1,413.73 1,414.93 1.415.10 1,414.13 1,415.16 1,414.71 1,415.00

154
PASOS Rreal VALOR DE RESISTENCIA APROXIMADA POR CANAL (Q)RO Rl R2 R3 R4 R5
21 1,460.80 1,462.78 1,463.01 1,462.40 1,462.89 1,462.74 1,463.0922 1,507.95 1,506.39 1,506.55 1,506,42 1,506.83 1,506.37 1,506.7123 1,554.85 1,554.25 1,554.04 1,554.23 1,554.18 1,554.27 1,554.2624 1,601.83 1?601.74 1,601.96 1,602.14 1,601,83 1,602.06 1,601.8225 1,648.75 1,649.39 1,649.45 1,649.96 1,649.26 1,649.53 1,649.3626 1,695.60 1,697.07 1,696.93 1,697.47 1,696.84 1,697.01 1,696.9827 1,742.35 1,740.58 1,740.64 1,741.04 1,740.51 1,740.79 1,741.0728 1,789.20 1,788.39 1,788.27 1,787.81 1,788.30 1,788.04 1,788.6429 1,836.05 1,835.89 1,835.97 1,835.81 1,835.74 1,835.85 1,836.0830 1,882.85 1,883.68 1,883.48 1,883.10 1,883.60 1,883.23 1,883.4531 1,929.53 1,930.75 1,930.92 1,930,56 1,931.11 1,930.97 1,930.7932 1,976.58 1,978.56 1,978.49 1,978.45 1,978,65 1,976.73 1,975.2533 2,024.00 2,021.98 2,022.42 2,021.74 2,022.36 2,022.80 2,022.6334 2,071.00 2,070.09 2,069.99 2,069.76 2,070.05 2,070.35 2,070,2635 2,118.00 2,117-72 2,117.36 2,117.96 2,117.50 2,117.75 2,117.7036 2,166.00 2?165.67 2,165.83 2,165.85 2,165.85 2,166.33 2,166.2837 2,211,50 2,213,34 2,213.31 2,212.99 2,213.20 2,213.25 2,213.7138 2,258.50 2/257.53 2,256.86 2,256.90 2,256.98 2,256.86 2,257.3139 2,305,00 2,304.72 2,303.99 2,304.28 2,304.17 2,304.11 2,304.6240 2,352,50 2,352,27 2,352.12 2,352,54 2,352.23 2,352,36 2,352.3141 2,399.50 2,399.43 2,399.84 2,399,66 2,399.58 2,399.73 2,399.5242 2,446.00 2,446.44 2,447.17 2,447.17 2,447.04 2,446.95 2,446.64

155
4.1 TABLA DE VALORES-
fireal
(Q)
474.25521.38567.75614.90661.95708.50754.93802.05848.90895.95942.93990.381038.251085.251132.801179.251226.481272.931320.131366.981413.731460.801507.951554.851601.831648.751695.601742.351789.201836.051882.851929.531976.582024.002071.002118.002166.002211.502258.502305.002352.502399.502446.00
RO
W
473.31520.93568,06615.35663.35710.34753.57801.17848.93896.34944.13988.821037,411085.031133.201180.591224.551271.971319.941367.421414.931462.781506.391554.251601.741649.391697.071740.581788.391035.891083.681930.751978.562021.982070.092117.722165.672213.342257.532304.722352.272399.432446.44
tr
('
52.49.46.44.42.40.38.36.35.33.32.31.29.28.27,26.25.24.23.22.21.20.20.19.18.17.17.16.15.15.14.14.13.12.12.11.
C)
243481473541629335874815887057514952586803991841669425579226630243842771
11.1610.10.
6412
9.629.8.8.
116215
ti
Í'C)
52.29749.3946.8044.4542.2740.3238.6536.9335.3333.8432.4331.1829.9028.7127.5626.4925.5424.5523.6022.6921.8220.9720.2219.4318.6717.9417.2216.5915.9115.2614.6214.0113.4012.8612.2811.7211.1610.6210.139.629.118.628.14
errorea er
00000000
CC)
.06131
.04533
.00967
.01989
.07565
.09235
.02762
.004630.01812000000000000000000000000000
.02791
.04918
.03436
.02136
.00950
.00622
.01988
.04714
.03200
.01715
.00972
.01354
.02042
.04421
.02327
.01454
.00240
.02696
.01968
.00687
.00171
.01069
.01599
.02512
.02454
.01080
.003340.003960000
.02113
.01049
.00315
.002150.001010.00430
(*}
0.117370.091060.020650.044730.178640.228520.071530.012550.051260.082400.151430.110300.071490.033110.022560.074990.384940.330500.072740.042850.062010.097310.219300.119880.077910.013360.156270.118760.043160.011240.073090.114020.187100.391100.088010.028500.035490.198530.103640.032760.023630.011720.05278
000000000000000000000000
precisiónK 1W
.11724
.08667
.01849
.03804
.14466
.17658
.05282
.00886
.03465
.05337
.09405
.06570
.04085
.01817
.01189
.03801
.09014
.06119
.03280
.01858
.02589
.03906
.08454
.044490.02780000000000000000000
.00458
.05155
.03763
.01314
.00328
.0,2045
.03057
.04803
.04693
.02064
.00630
.00757
.04040
.02006
.00602
.00412
.00193
.00022
Í'C)
0.061240.042760.008650.016920.061260.071360.020400.003270.012250.018080.030550.020460.012210.005220.003280.010080.022980.015000.007730.004210.005650.008200.017060.008640.005190.000820.008890.006230.002090.000500.002990.004290.006450.006020.002530.000750.000840.004300,002030.000500.000300.000170.00067
seneib.S
(Q/c'C)
0.153690.172200.190760.209700.229100.240300.266530.206460.306660.326910.347480.367120.380390.409400.430800.451990.472030.493510.515370.537160.559040.501250.601890.624280.646670.669200.691820.712900.735700.758790.781940.804000.828250.849910.873610.897200.921100.944790.967200.990951.015021.038981.06292

ti
156
errorea er
Í ' C ) ( X )
VALÜfiES MÁXIMOS:VALORES MIBIMOS:VALORES MEDIOS :
RAMGO EHTHADA = 44.16 'CRASGO D8 SALIDA - 1973.13 Q
52.30 0.092358.14 0.00101
23.80 0.02184
precisiónI
Í ' C )
seneib.S
(Q/c'C)
0.228520.011240.08962
0.17658 0.07136 1.062920.00193 0.00017 0.153690.04177 0.01263 0.58981
4.2 CARACTERÍSTICA ESTÁTICA.
2500-
onnn -.r\¿(j\J(jG
0
Ü l w u U
ÜLJ
n ififld -y lUUU
uh
uÍY cnn -^ jUU
n -U 1c
\
rNK
^^\0 15 20 25 30 35 40 45 50 55
TEMPERATURA MEDIDA fm (°C)
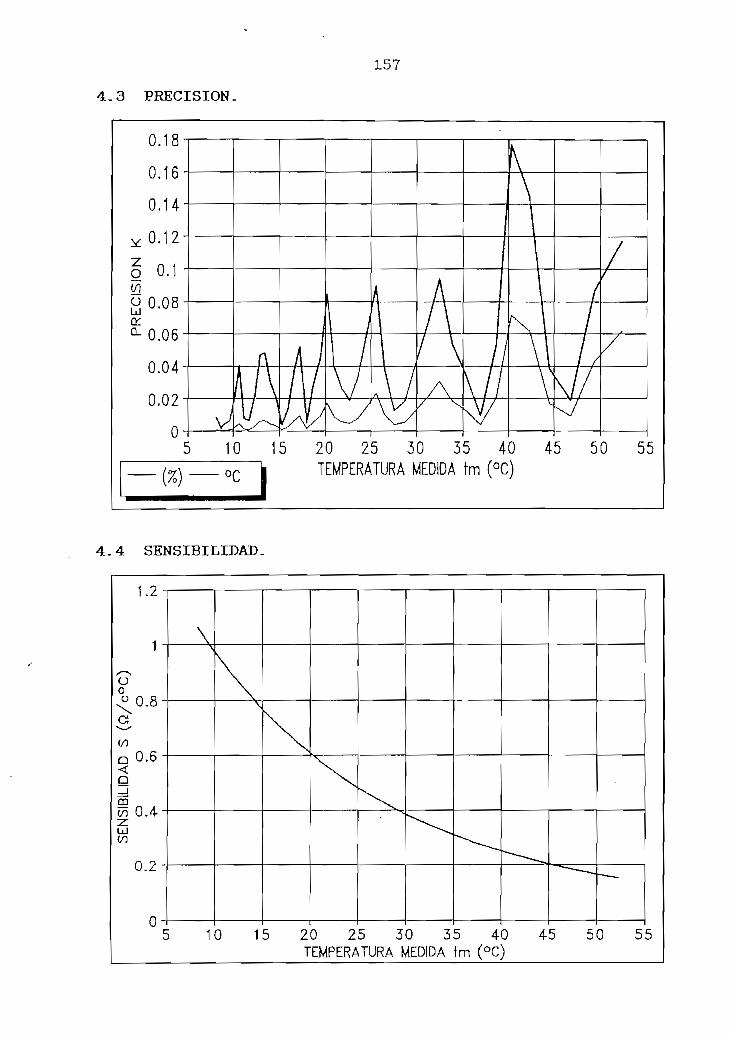
157
4.3 PRECISIÓN.
10
°c15 20 25 30 35 40 45
TEMPERATURA MEDIDA tm (°C)50 55
4.4 SENSIBILIDAD.
1 o _ — — — — — — —I . Z.
^
C?o^0.8-
300
„ .0 n<O-J£13
00 U. 4-•z.LU00
0.2-
Q-l 1 1 1 í . . r— -r- ~ ,
\
\
"\^~^^ —— .
- —
5 10 15 20 25 30 35 40 4-5 50 55TEMPERATURA MEDIDA tm (°C)

158
5.1 TABLA DE VALORES.
Kreal
W
474.2552156761466170875480284889594299010381085
.38
.75
.90
.95
.50
.93
.05
.90
.95
.93
.38
.25
.251132.801179122612721320136614131460150715541601164816951742178918361882192919762024207121182166221122582305235223992446
.25
.48
.93
.13
.98
.73
.80
.95
.85
.83
.75
.60
.35
.20
.05
.85
.53
.58
.00
.00
.00
.00
.50
.50
.00
.50
.50
.00
Ri
(fl)
473.80521.11567.97615.50662.90710.11753.41801.05848.58896.38944.17988.711037.171085.061133.411180.561224.851272.071319.871367.641415.101463.011506.551554.041601.961649.451696.931740.641788.271835.971883.481930.921978.492022.422069.992117.362165.832213.312256.862303.992352.122399.842447.17
tr
co52.2449.3446.44.42.40.38.36.35.33.32.31.29.28.27.26.
8147354162933587481588705751
25.4924.23.22.21.20.20.
525868839918
19.4118.17.17.16.15.15.14.14.13.12.12.11.11.10.10.
669425579226630243842771166412
9.62• 9.8.8.
116215
ti
CO
52.26549.3846.8044.4442.2940.3338.6536.9435.3433.8432.4331.1929.9128.7127.5626.4925.5324.5523.6022.6921.8120.9720.2219.4418.6717.9417.2316.5915.9115.2614.6214.0013.4012.8612.2811.7211.1610.6210.149.639.128.628.13
errorea erCO (X)
0.02918 0.055870.035280.005150.026760.056180.083130.033450.008760.006780.028970.050170.037360.027490.008780.010880.019320.040880.029960.018530.005530.016550.024350.041570.026770.010990.003270.024950.018830.005200.000660.008030.018150.024280.019070.012010.007590.002070.020730.017810.011020.003720.003150.01177
0.071510.011000.060180.132670.205720.086600.023710.019190.085540.154460.119940.091990.030590.039480.072890.160380.122190.078560.024370.075820.116000.206010,137910.058890.01825O.L44660.113660.032660.004300.054900.129400.180850.148570.097900.064780.018600.194760.175940.114610.040790.036590.14447
precisión1 1(X) CO
0.05584 0.029170.067500.009850.051210,107500.159060.063990.016750.012980.055440.095990,071480.052590.016800.020830.036970.078220.057330.035440.010580.031670.046590.079540.051220.021030.006260.047740.036040.009950.001260.015370.034720.046450.036490,022980.014520.003970.039660.034070.021090.007110.006040.02251
000
.03331
.00461
.022770.0455300000000000000000000000000000000000000
.06428
.02471
.00619
.00459
.01878
.03118
.02227
.01571
.00482
.00574
.00980
.01994
.01406
.00836
.00240
.00691
.00978
.01605
.00994
.00392
.00112
.00824
.00597
.00158
.00019
.00225
.00487
.00624
.00468
.00282
.00170
.00044
.00422
.00345
.00203
.00065
.00052
.00183
S(Q/c'O
0.153850.172260.190730.209750.228950.248300.266470.286420.306530.326930.347490.367080.388300.409410.430870.451980.472150.493550.515340.537250.559100.581340.601950.624200.646760.669230.691770.712920.735730.758820.781860.804940.828220.850100.873560.897050.921170.944780.966910.990631.014951.039151.06324
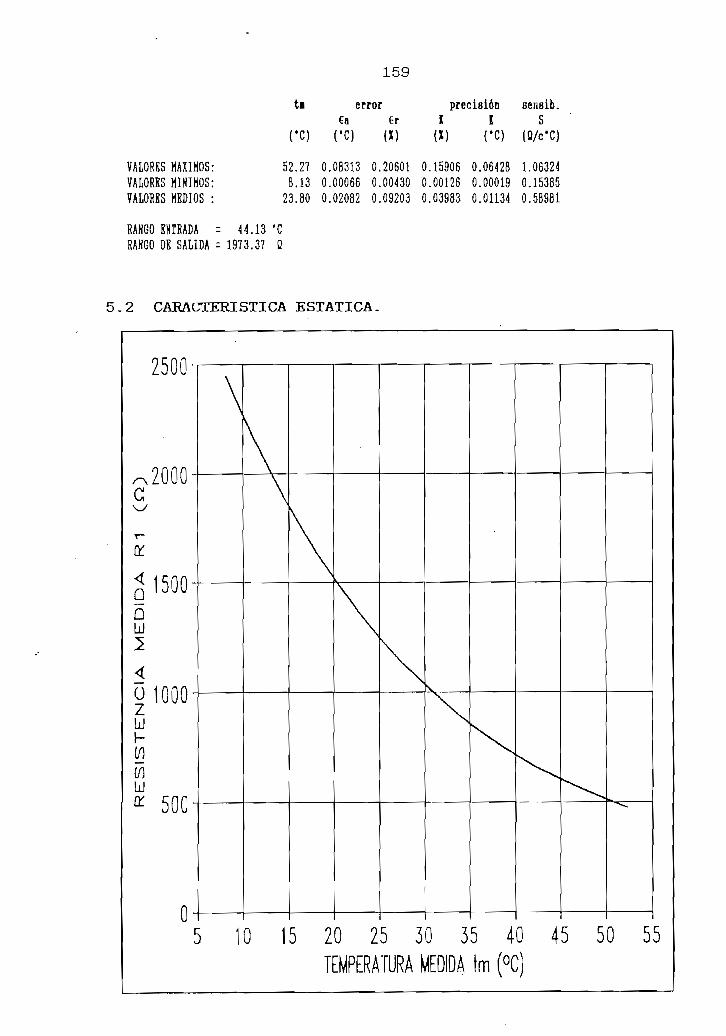
RE
SIS
TE
NC
IA
ME
DID
A
R1
(O
)
en
r-o
en
W3
SO
=
0
CO
C
D
CO
m
CP
0=
O
CC
O O
O
era
co
CO
—-3
CO
OJ
Oí
co
C33
co
<=>
tnco
*—
to
Oo
fo
-Oco
cr
> en
en
CZ3 en
en
en
h—
O
-co
en o
*C
D
CO
C
Oca
oo to
^— en
^^
co)—
..cr

r«
oC
/l en
m o
m
OJ o en
O OO en en o en en
SE
NS
IBIL
IDA
D
S (
Q/c
°C)
p KJO O)
O boN)
Oí co w 2! CO H td H fí H tí
Oí r co O M CO H O 35
05 O

(*•
RE
SIS
TE
NC
IA
ME
DID
A
R2
(O
)
en
en
ho
en
en
- ss
s
35 o
ae o
cen
es
caco co
en
r-o
en
CO
O
O
3
O
C3 O
en to
en
O O
O
o o
oI—
' C
3
CJ1
o
c=>
tnC
x3
I—»
Ps3
cu ro
^—
en
i—
* o
CD
C
J1 C
T>
CO
C
U
CO
C33
C
O tO
»—
OO
Jk
.
• •
09
IO
í»~*
a
O
C/3
C
8•
J-"
(T3
CT
en
en
en

(*'•
o
~D m > m o o :>
O en'
o o
01 en o en en
'
SE
NS
IBIL
IDA
D
S (
fí/c
°C)
p K)
Oo oí
o bo
O3 en W as en H W H tr* H b
PR
EC
ISIÓ
N K
O
C3
O
O)
03 O H en H O
CD CO
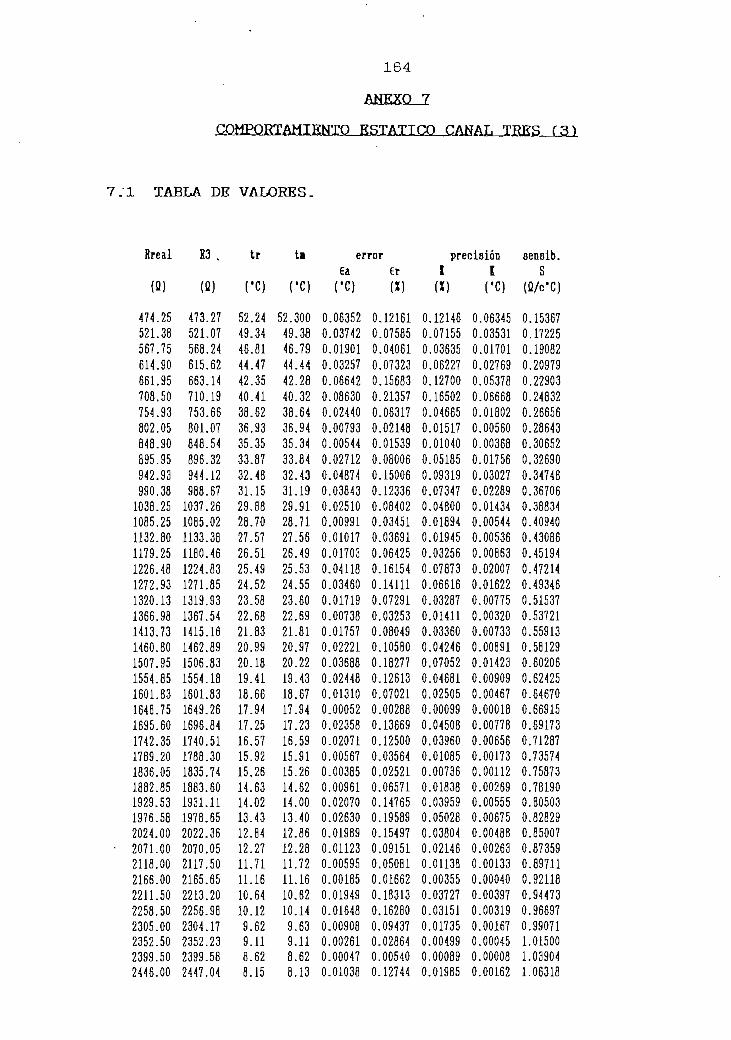
164
7.1 TABLA DE VALORES.
Rreal
(Q)
474.521.567.614.661.708.754.802.848.895.942.990.1038.1085.1132.1179.1226.1272.1320.1366.1413.1460.1507.1554.1601.1648.1695.1742.1789.1836.1882.1929.1976.2024.2071.2118.2166.2211.2258.2305.2352.2399.2446.
25387590955093059095933825258025489313987380958583756035200585535800000000505000505000
B3 ,
(Q)
473.27521.07568.24615.62663.14710.19753.66801.07848.54896.32944.12988.671037.261085.021133.381180.461224.831271.851319.931367.541415.161462.891506.831554.181601.831649.261696.841740.511788.301835.741883.601931.111978.652022.362070.052117.502165.852213.202256.982304.172352.232399.582447.04
tr
CC)
52.2449.3446.8144.4742.3540.4138.6236.9335.3533.8732.4831.1529.8828.7027.5726.5125.4924.5223.5822.6821.8320.9920.1819.4118.6617.9417.2516.5715.9215.2614.6314.0213.4312.8412.2711.7111.1610.6410.129.629.118.628.15
ti
CC)
52.30049.3846.7944.4442.2840.3238.6436.9435.3433.8432.4331.1929.9128.7127.5626.4925.5324.5523.6022.6921.8120.9720.2219.4318.6717.9417.2316.5915.9115.2614.6214.0013.4012.8612.2811.7211.1610.6210.149.639.118.628.13
error€a 6rCC)
0.063520.037420.019010.032570.066420.086300.024400.007930.005440.027120.048740.038430.025100.009910.010170.017030.041180.034600.017190.007380.017570.022210.036880.024480.013100.000520.023580.020710.005670.003850.009610.020700.026300.019890.011230.005950.001850.019490.016480.009080.002610.000470.01038
(X)
0.121610.075850.040610.073230.156830.213570.063170.021480.015390.080060.150060.123360.084020.034510.036910.064250.161540.141110.072910.032530.080490.105800.182770.126130.070210.002880.136690.125000.035640.025210.065710.147650.195890.154970.0915Í0.050810.016620.183130.162800.094370.028640.005400.12744
precisiónI I(X)
0.121460.071550.036350.062270.127000.165020.046650.015170.010400.051850.093190.073470.048000.018940.019450.032560.078730.066160.032870.014110.033600.042460.070520.046810.025050.000990.045080.039600.010850.007360.018380.039590.050280.038040.021460.011380.003550.037270.031510.017350.004990.000890.01985
sen fu b.S
CC) (Q/c'C)
0000000000000000000000000000000000000
.06345
.03531
.01701
.02769
.05378
.06668
.01802
.00560
.00368
.01756
.03027
.02289
.01434
.00544
.00536
.00863
.02007
.01622
.00775
.00320
.00733
.00891
.01423
.00909
.00467
.00018
.00778
.00656
.00173
.00112
.00269
.00555
.00675
.00488
.00263
.00133
.000400.0039700000
.00319
.00167
.00045
.00008
.00162
0000000000000000000000000000000000000000111
.15367
.17225
.19082
.20979
.22903
.24832
.26656
.28643
.30652
.32690
.34748
.36706
.38834
.40940
.43086
.45194
.47214
.49346
.51537
.53721
.55913
.58129
.60206
.62425
.64670
.66915
.69173
.71287
.73574
.75873
.78190
.80503
.82829
.85007
.87359
.89711
.92118
.94473
.96697
.99071
.01500
.03904
.06318

165
VALORES M A X I H O S :VALORES HINIHOS:VALORES MEDIOS ;
RANGO ENTRADA - 44 .16 'CE SALIDA = 1973.77 Q
(528
23
ti
•C)
.30
.13
.80
000
errorea(fC)
.08630 0.
.00047 0.
.02192 0.
£r(X)
213570028809253
000
precisión1 1(X) re).16502 0.06668.00089 0.00008.04191 0.01255
sensib.. S
(fl/c'C)
1.063180.153670.58981
7.2 CAKACTERISTICA ESTÁTICA.
o^nflZüUU
Oflfifi^ZUUU
£K)c¿
Ü! \ U W
üLJ2
n ^ f\c\f\U 1UUU
Uh
iñÜJ(Y ^nn -11 jUU
nUn
\
\
\
> 10 15 20 25 30 35 40 45 50 55TEMPERATURA MEDIDA tm (°C)
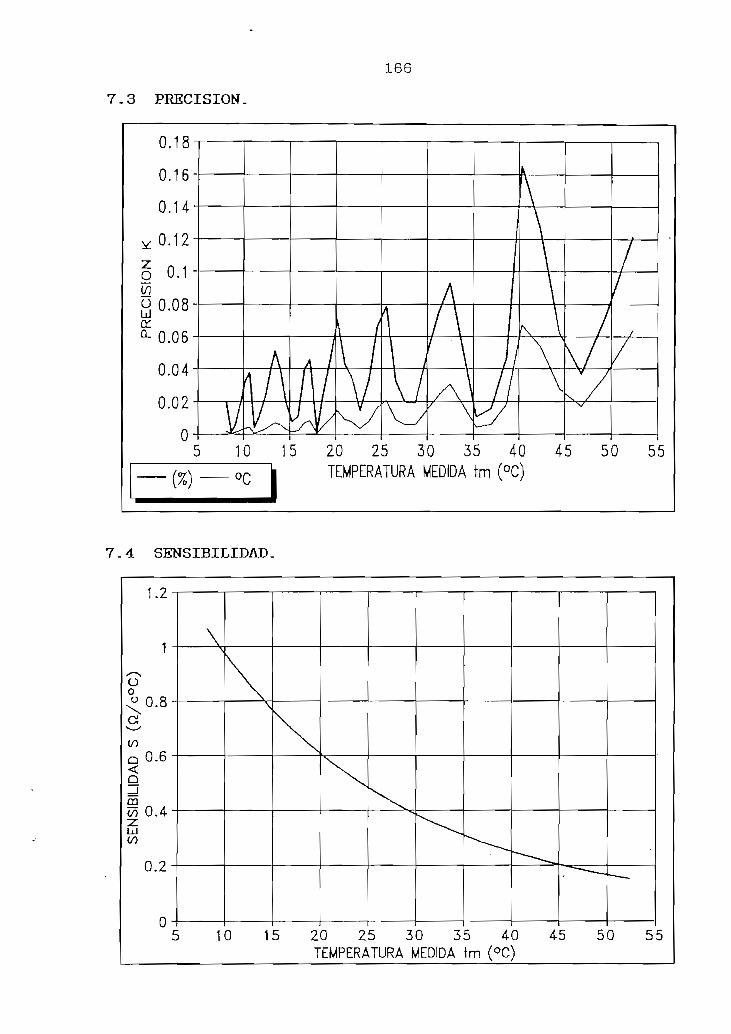
(•*(*
o
o
m o
s: ~o m m o D
OJ
O w en
O OO en oí o en en
SE
NS
IBIL
IDA
D
S (
Q/c
°C)
O CD
O boN
>en co M td H f< H O
O O
m o
~D n
en OJ
O
O
en en o en en
PR
EC
ISIÓ
No
o
o
o
o
oO en
oO
O
(O
-£-
CT
1
O
Cu O M en H O as
CD
CD
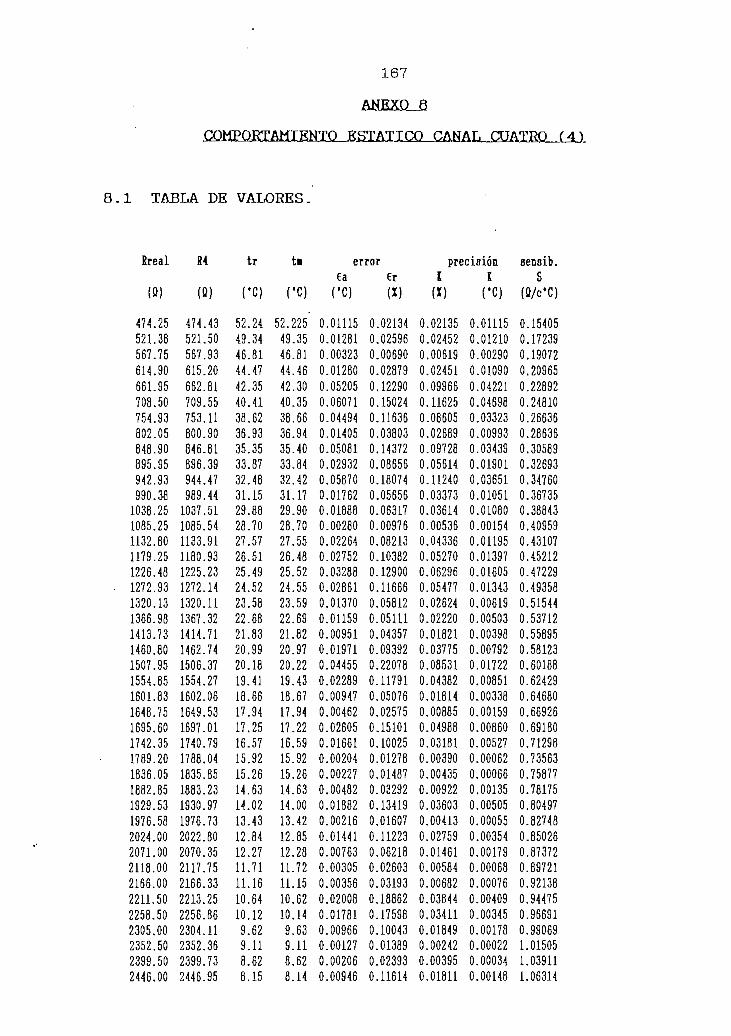
167
ÍXMEQSTAMIEMTQ^ESTATICQ CANAL CUATRO f 4 )
8.1 TABLA DE VALORES.
Kreal
W
474.25521.38567.75614.90661.95708.50754.93802.05848.90895.95942.93990.381038.251085.251132.801179.251226.481272.931320.131366.981413.731460,801507.951554.851601.831648.751695.601742.351789.201836.051882.851929.531976.582024.002071.002118.002166.002211.502258.502305.002352.502399.502446.00
R4
(fl)
474.43521.50567.93615.20662.81709.55753.11800.90846.81896.39944.47989.441037.511085.541133.911180.931225.231272.141320.111367.321414.711462.741506.371554.271602.061649.531697.011740.791788.041835.851883.231930.971976.732022.802070.352117.752166.332213.252256.862304.112352.362399.732446.95
tr
CC)
52.2449.3446.8144.4742.3540.4138.6236.9335.3533.8732.4831.1529.8828.7027.5726.5125.4924.5223.5822.6821.8320.9920.1819.4118.6617.9417.2516.5715.9215.2614.6314.0213.4312.8412.2711.7111.1610.6410.129.629.118.628.15
<
52.4946444240383635
ti
•C)
225.35.81.46.30.35.66.94.40
33.843231292827
.42
.17
.90
.70
.5526.48252423222120201918171716151514141312121111
.52
.55
.59
.69
.82
.97
.22
.43
.67
.94
.22
.59
.92
.26
.63
.00
.42
.85
.28
.72
.1510.62109988
.14
.63
.11
.62
.14
error6a GrCC)
0.011150.012810.003230.012800.052050.060710.044940.014050.050810.029320.058700.017620.018880.002800.022640.027520.032880.028610.013700.011590.009510.019710.044550.022890.009470.004620.026050.016610.002040.002270.004820.018820.002160.014410.007630.003050.003560.020080.017810.009660.001270.002060.00946
(*)
0.021340.025960.006900.028790.122900.150240.1L6360.038030.143720.086560.180740.056560.063170.009760.082130.103820.129000.116660.058120.051110.043570.093920.220780.117910.050760.025750.151010.100250.012780.014870.032920.134190.016070.112230.062180.026030.031930.188620.175980.100430.013890.023930.11614
0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.
precisióní 1(X)
021350245200619024510996611625086050268909728056141124003373036140053604336
0.052700.0.0,0.0.0.0.0.0.0.0.0.0.0.0.0.
06296054770262402220018210377508531043820181400885049880318100390004350092203603
0.004130.0.0.0.0.0.0.0.0.0.
02759014610058400682038440341101849002420039501811
aenaib.S
CC) (Q/c'C)
0.011150.012100.002900.010900.042210.046980.033230.009930.034390.019010.036510.010510.010800.001540.011950.013970.016050.013430.006190.005030.003980.007920.017220.008510.003380.001590.008600.005270.000620.000660.001350.005050,000550.003540.001790.000680.000760.004090.003450.001780.000220.000340.00148
0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.1.1.1.
15405172391907220965228922481026636286363058932693347603673538843409594310745212472294935851544537125589558123601886242964680669266918071298735637587778175804978274885026873728972192138944759669199069015050391106314

r*
RE
SIS
TE
NC
IA
ME
DID
A
R-4
- (O
)=¡0
3»
=«5
=o
re -
*a
en
CD
CD
CD
CD
CD
CD
en
C»J
ae
—3
e-"
i — i
"Oc=
ae oc
en o
CD
co
en
en
y
eo —-J
ro
~o
C3
O
S
o o
>—*
es
co
t—'
tn
c-o
co
—
j
en
CC
J <^
>
Cs3
en
en
oJ
. C
O
—3
C-O
C
3
CO
H1
CD
CD
en
en
*>
enro
co
. C
O
CO
<=>
O
t—*
en

169
8.3 PRECISIÓN.
0,12
O,
10
°c20 25 30 35 40 45TEMPERATURA MEDIDA tm (°C)
50 55
8.4 SENSIBILIDAD.
1.2
1 -
oo^0.8
coo 0.6<Q=J03
co 0.4LJ
0.2

170
ANEXOS
9.1 TABLA DE VALORES.
Rreal
(£»
474.25521.38567.75614.90661.95708.50754.93802.05848.90895.95942.93990.381038.251085.251132.801179.251226.481272.931320.131366.981413.731460.801507.951554.851601.831648.751695.601742.351789.201836,051882.851929.531976.582024.002071.002118.002166.002211.502258.502305.002352.502399.502446.00
B5
W
474.00521.42-567.97615.24662.77709.71753.48801.00848.55896.26944.21988.651037.181085.191133.341180.591225.041272.041320.061367.821415.001463.091506.711554.261601.821649.361696.981741.071788.641836.081883.451930.791975.252022.632070.262117.702166.282213.712257.312304.622352.312399.522446.64
tr
CC)
52.2449.3446.8144.4742.3540.4138,6236,9335.3533.8732.4831.1529.8828.7027.5726.5125.4924.5223.5822.6821.8320.9920.1819.4118.6617.9417.2516.5715.9215.2614.6314.0213.4312.8412.2711.7111.1610.6410.129.629.118.628.15
ti
co52.25249.3646.8044.4642.3040.3438.6536.9435.3433.8432.4331.1929.9128.7127.5626.4925,5324.5523.5922.6821.8220.9620.2219.4318.6717.9417.2216.5815.9115.2614.6214.0113.4412.8512.2811.7211.1510.6210.139.629.118.628.14
errorea Gr
0.0.
CC)
0161701727
0.005070.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0,0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.0.
01441050420674603099010630057502534051250391602718005780093901999036810307501467-002100148402574038830230701333001970256301258010480009000763016510163401655008690036000298025260128600419001760001500630
(X)
0.030950.035000.010830.032410.119060.166930.080250.028790.016280.074810.157780.125730.090960.020150.034050.075390.144420.125420.062230.009250.067990.122630.192430.118880.071430.010980.148560.075900.065840.005880.052120.117710.121710.128940.070820.030750.026730.237350.127020.043530.019320.001700.07737
0000000000000000000000000000000000000000
precisiónI i(X)
.03094
.03305
.00970
.02758
.09650
.12910
.05932
.02035
.01101
.04849
.09807
.07495
.05201
.01107
.01797
.03825
.07045
.05885
.02808
.00401
.02841
.04926
.07432
.04416
.02551
.00377
.04904
.02407
.02006
.00172
.01459
.03159
.03127
.03168
.01663
.00689
.00571
.04834
.02461
.008010.0033700.00028.01206
0000000000000000000000000000000000000000000
CC)
.01616
.01631
.00454
.01227
.04087
.05217
.02291
.00752
.00389
.01642
.03185
.02335
.01554
.00318
.00495
.01014
.01796
.01443
.00662
.00091
.00620
.01034
.01500
.00857
.00476
.00068
.00846
.00399
.00319
.00026
.00214
.00443
.00420
.00407
.00204
.00081
.00064
.00515
.00249
.00077
.00031
.00002
.00098
eensib.S
(Q/c'C)
0.153910.172360.190730.209660.228900.248160.266500.286400.306520.326880.347510.367050.388310.409460.430850.451990.472220.493540.515420.537320.559070.581370.602020.624290.646700.669190.691790.713100.735880.758870.781840.804890.826870.850190.873680.897190.921360.944950.967110.990911.015031.039011.06300

171
VALORES MAXIHOS:VALORES HINIHOS;VALORES HEDIOS :
í
52823
ti
fC)
.25
.14
.80
errorea er
000
Í'C)
.06746
.00015
.01793
000
U)
.23735
.00170
.07852
000
precisión1 Kw.12910.00028.03430
000
CC)
.05217
.00002
.00957
sene ib.S
(Q/c'C)
1.063000.153910.58981
RANGO KÜTRADÁ - 44.11 'CDE SALIDA - 1972.63 fl
9.2 CARACTERÍSTICA ESTÁTICA.
O^fifiZülJU
if]f\í\^zuuuSUlo:<í i £fifi -Q IJUU
QÜJ5
ñ \^ 1UUU
Uh(/)(/}UJ(Y £nn^ DÚO
f\-. Unc
\
NJ
V
^
\
10 ..15 20 25 30 35 40 45 50 55TEMPERATURA MEDIDA tm (°C)
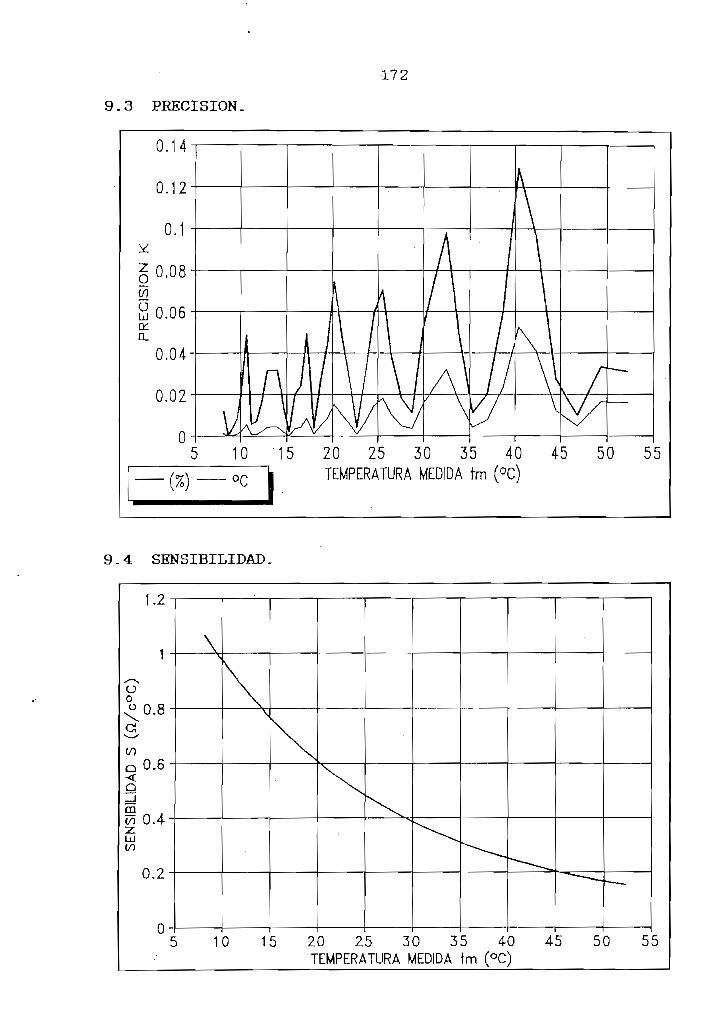
O
O'
Oí'
n s: ~D
en
o o
en-
o o
OT
O '
en en'
SE
NS
IBIL
IDA
D S
(fí/c
°C)
p N>o
p CD
O boN
>
co co w 2S C/3
H w H t-l
H
CD
O
PR
EC
ISIÓ
N K
o
o
oO
O H en H O 25
H1
-O DO

173
CQHEQBIAllI^^
10.1 TABLA BE VALORES.
Tieipo(8)
0.000.480.951.431.902.382.863.333.814.294.765.245.716.196.677.147.628.108.579.059.5210.0010.4810.9511.4311.90.12.3812.8613.3313.8114.2914.7615.2415.7116.1916.6717.1417.6218.1018.5719.0519.5220.0020.4820.95
ADi
2046.002046.002046.002046.002046.002046.002046.002046.002046.002046.002046.002046.002046.002046.002046.002046.002045.001979.001377.00943.00791.00745.00741.00737.00732.00728.00723.00719.00717.00716.00716.00715.00714.00712.00711.00711.00710.00710.00710.00709.00709.00709.00709.00709.00708.00
VALOR DECIMALAD5
2373.402369.602367.802365.202362.402359.002355.802350.202342.402084.201121.40804.60730.60716.20720.00,717.40709.20706.60706.60706.00705.20704.40703.80703.80704.00704.00704.40704.00704.00704.40703.20702.40702.00701.40700.20699.40699.00699,40700.80702.40702.60702.40702.00701.80701.20
ADÍO
2179.002177.302175.702174.002172.502169.002165.902158.001571.10982.10810.70725.20713.90711.90709.40707.70706.40705.30704.70703.80703.40703.20703.00702.60702.50702.00701.70701.00700.30700.00699.70700.40919.901231.401395.101506.701595.401684.201785.201860.201925.201987.102041,302086,802135.30
AD20
2678.952673.952668.102638.201339.70776.65757.85739.95729.00722.50717.60714.60711.80710.95710.45709.95709.40714.70937.151362.701538.901654.751742.651813.651874.551938.402017.052053.952087.302115.302139.452159.852176.602188.802195.402197.752198.902198.802197.252194.252188.952182.502175.352166.952158.40
Hrl
1484.531484.531484.531484.531484.531484.531484.531484.531484.531484.531484.531484.531484.531484.531484.531484.531484.031451.211152.01936.61861.27838.48836.50834.51832.04830.06827.58825.60824.61824.11824.11823.62823.12822.13821.64821.64821.14821.14821.14820.65820.65820.65820.65820.65820.15
RESISTENCIA (D)Rr5
1647.301645.421644.521643.231641.841640.151638.561635.771631.891503.521025.11868.00831.34824.21826.09824.81820.75819.46819.46819.16818.76818.37818.07818.07818.17818.17818.37818.17818.17818.37817.77817.38817.18816.88816.29815.89815.69815.89816.59817.38817.48817.38817.18817.08816.78
RrlO
1550.661549.811549.021548.171547.421545.681544.141540.211248.44956.00871.03,828.67823.07822.08820.84820.00819.36818.81818.52818.07817.87817.77817.68817.48817.43817.18817.03816.68816.34816.19816.04816.39925.151079.701161.001216.441260.521304.651354.861392.151424.461455.241482.191504.811528.93
Rr20
1799.161796.671793.771778.911133.48854.16844.84835.98830.55827.33824.91823.42822.03821.61821.36821.12820.84823.47933.711144.911232.441290.021333.711369.001399.281431.031470.131488.481505.061518.981530.991541.131549.461555.531558.811559.981560.551560.501559.731558.241555.601552.401548.841544.661540.41
TEMPERATURA ('C)TI
20.5920.5920,5920.5920.5920.5920.5920.5920.5920.5920.5920.5920.5920.5920.5920.5920.6021.1727.1332.6534.9435.6735.7435.8035.8935.9536.0336.1036.1336.1536.1536.1736.1836.2236.2336.2336.2536,2536.2536.2736.2736.2736.2736.2736.28
T5
17.9718.0018.0118.0318.0518.0818.1018.1518.2120.2730.2234.7235.9136.1536.0836.1336.2636.3136,3136.3236.3336.3436.3536.3536.3536.3536.3436.3536.3536.3436.3736.3836.3936,4036.4236.4336.4436.4336.4136.3836.3836.3836.3936.3936.40
TÍO
19.4919.5119.5219.5319.5419.5719.6019.6625.0432.0934.6336.0036.1936.2236.2636.2936.3136.3336,3436.3536.3636.3736.3736.3836.3836.3936.3936.4036.4136.4236.4236.4132.9828.8426.9325.7124.7923.9022.9322.2321.6521.1020.6320.2519.85

174
Tieipo(0)
21.4321.9022.3822.8623.3323.8124.2924.7625.2425.7126.1926.6727.1427.6228.1028.5729.0529.5230.0030.4830.9531.4331.9032.3832.8633.3333.8134.2934.7635.2435.7136.1936.6737.1437.6238.1038.5739.0539.5240.0040.4640.9541.4341.9042.3842.8643.3343.8144.2944.7645.2445.7146.1946.6747.14
AD1
708.00708.00708.00707.00707.00707.00707.00707.00707.00706.00706.00706.00705.00705.00705.00705.00705.00705.00705.00705.00705.00704.00704.00704.00704.00703.00703.00703.00703.00702.00703.00703.00703.00702.00702.00701.00701.00701.00701.00701.00701.00701.00702.00702.00701.00701.00701.00701.00701.00700.00703.00782.00970.001142.001267.00
VALORAD5
701.20796.001043.801206.801316.001392.801455.801510.801551.401594.001633.001668.801702.001731.201759.001784,801811.601837.201863.401888.001912.201935.401957.601978.801999.202018.002035.802047.202061.602078.202094.202109.002123.002136.402148.602160.602172.602185.202196.602208.002218.002226.202234.202240.802247.202253.202258.402263.202268.202273.002277.002281.002284.402287.802290.40
DECIMALADÍO
2179.202218.002256.702302.702360.102413.902464.802491.502511.702532.002548.902557.802559.302562.502564.502570.502574.702575.802576,302577.202579.402585.502591.102599.602606.602612.802616.902620.602624.402628.702633.102636.902640.002642.702645.002647.902651.602656.102661.302665.902670.502675.202679.302683.702687.602691.102693.802695.902697.802699.70
RKSISTKHCIá (fl)AD20
2150.702143.352135.302126.052115.102104.902096.502089.352083.402077.952072.652067.402061.252055.002049.002047.002046.052043.302039.652036.952034.802033.102031.60
Rrl
820.15820.15820.15819.66819.66819.66819.66819.66819.66819.16819.16819.16818.67818.67818.67818.67818.67818.67818.67818.67818.67818.17818.17818.17818.17817.68817.68817.68817.68817.18817.68817.68817.68817.18817.18816.68816.68816.68816.68816.68816.68816.68817.18817.18816.68816.68816.68816.68816.68816.19817.68856.81950.001035.331097.38
Rr5
816.78863.74986.601067.491121.711159.861191.151218.481238.651259.821279.211297.001313.501328.021341.841354.661367.991380.711393.741405.971418.001429.541440.571451.111461.261470.601479.461485.121492.281500.541508.491515.851522.811529.471535.541541.511547.471553.741559.411565.071570.051574.121578.101581.381584.561587.551590.131592.521595.011597.391599.381601.371603.061604.751606.04
RrlO
1550.761570.051589.291612.161640.691667.441692.741706.011716.051726.141734.541738.961739.711741.301742.291745.271747.361747.901748.151748.601749.691752.731755.511759.731763.211766.291768.331770.171772.051774.191776.381778.271779.811781.151782.291783.731785.571787.811790.391792.671794.961797.291799.331801.521803.461805.191806.541807.581808.521809.47
Rr20
1536.591532.931528.931524.331518.881513.811509.641506.081503.121500.411497.781495.171492.111489.001486.021485.021484.551483.181481.371480.031478.961478.111477.37
TKMPmTÜÍA COTI
36.2836.2836.2836.3036.3036.3036.3036.3036.3036.3236.3236.3236.3336.3336.3336.3336.3336.3336.3336.3336.3336.3536.3536.3536.3536.3736.3736.3736.3736.3936.3736.3736.3736.3936.3936.4036.4036.4036.4036.4036.4036.4036.3936.3936.4036.4036.4036.4036.4036.42
36.3735.0832.2629.9528.41
T5
36.4034.8631.2429.1427.8326.9526.2625.6725.2424.8024.4124.0523.7223.4423.1722.9322.6822.4422.2021.9821.7621.5521.3621.1721.0020.8320.6820.5820.4620.3220.1920.0719.9519.8419.7419.6419.5419.4419.3519.2619.1819.1119.0519.0018.9518.9018.8618.8218.7818.74
18.7118.6818.6518.6318.61
TÍO
19.4919.1818.8718.5118.0717.6617.2917.0916.9416.8016.6816.6116.6016.5816.5716.5216.4916.4816.4816.4716.4616.4216.3816.3216.2716.2216.1916.1716.1416.1116.0816.0516.0316.0116.0015.9815.9515.9215.8915.8515.8215.7915.7615.7315.7015.6815.6615.6515.6315.62

175
Tieipo(8)
47.6248.1048.5749.0549.5250.0050.4850.9551.4351.9052,3852.8653.3353.8154.2954.7655.2455.7156.1956.6757.1457.6258.1058.5759.0559.5260.0060.4860.9561.4361.9062.3862.8663.3363.8164.2964.7665.2465.7166.1966.6767.1467.6268.1068.5769.0569.5270.0070.4870.9571.4371.9072.3872.8673.33
VALOR DECIMALADÍ
1337.001394.001441.001478.001509.001535.001555.001578.001599.001619.001639.001655.001670.001684.001696.001708.001720.001730.001741,001749.001758.001765.001772.001778.001783.001788.001792.001796.001800.001804.001807.001810.001812.001814.001815,001817.001817.001819.001819.001819.001818.001817.001816.001813.001810.001808.001805.001803.001801.001799.001798,001796.001795,001795.001795.00
AD5 ADÍO
2293.2295.2296.2297.2298.2297.2297.2296.2294.2293.2290.2289,2287.2285.2284.2282.2280.2278.2276.2274.2271.2269.2266.2264.2261.2258.2256.2253.2251.2249.2248.2246.
0000406020602040602080004060408060204020804040000040008060602000
AD20 Rrl
1132.141160.451183.801202.181217.591230.501240.441251.871262.311272.251282.191290.141297.601304.561310.521316.491322.451327.421332.891336.871341.341344.821348.301351.281353.771356.251358.241360.231362.221364.211365.701367.191368.181369.181369.681370.671370.671371.661371.661371.661371.171370.671370.171368.681367.191366.201364.701363.711362.721361.721361.221360.231359.731359.731359.73
RESISTENCIA (Q)Rr5 RrlO
1607.331608.331609.031609.621609.921609.621609.421609.031608.131607.431606.241605.35"1604.551603.661603.061602.261601.171599.981599.081597.991596.791595.601594.111592.921591.431590.13 .1588.941587.851586.751585.761585.061583.97
TEHPERATURA ( 4 C )8r20 TI T5 TÍO
27.59 18.5926.94 18.5726.42 18.5626.02 18.5525.69 18.5525.41 18,5525.20 18.5524.96 18.5624.75 18.5724.55 18.5924.35 18.6024.19 18.6224.04 18.6323.90 18.6423.78 18.6523.66 18.6723.55 18.6823.45 18.7023.35 18.7223.27 18.7323.18 18.7523.12 18.7723.05 18.7922.99 18.8122.95 18.8422.90 18.8622.86 18.8822.82 18.8922.79 18.9122.75 18.9322.72 18.9422,69 18.9622,6922.6722,6622.6422.6422.6222.6222.6222.6322.6422.6522.6822.7122.7322.7522.7722.7922.8100 00¿¿.0¿
22.8422.8522.8522.85

Te
mp
era
tura
t
(°C
)
Cu 4 O a 0) (D CQ ct 4 (U CD 0 0 fU a CD H O 3 CD C^ H-
O

ANEXO 11
DIAGRAMAS ESQUEMÁTICOS
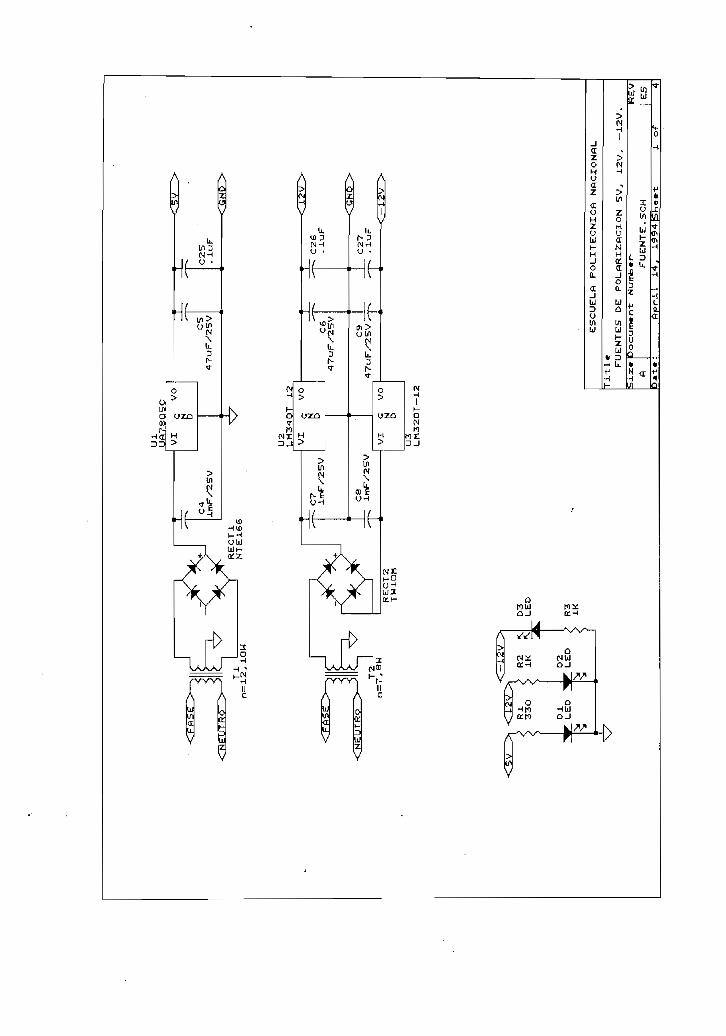
__-C
NE
UT
RO
>—
1n=l
<N
EU
TR
O
>—
>
n=7
>
33O
>
DI
1 F
LE
D 3
!
* ;
Ui
UA
78
05
C
1 _1
_ S
JL
_T_
— — -
H
^V
T
B
T
T£
_X
' X
Ü
C4
^^
C25
í
1 X
,
/""
lm
F/2
SV
4
7u
F/2
5V
. lu
F?
XV
^X
-
C
. .
. ^T
ñTTT
.1
NX
^\^
'
n
*
«
CS
HO
>
, 1
Y
RE
CT
-1
\E
.10
W
HT
Elb
b
U2
LM
34
0T
12
_ , ,
T-
. .^
_
_
^—
mm
-v.
1 '-r- C
7
g
^-r
^
-^p*
C26
1 ,
•S
^^t
ifnF
X2S
V
^
r^
.
JLU
FC
~
Tf*
-^
<.
47U
F/2
SV
^—i ^^
'\/
'
I C
8
C9
j
|
C27
r-s
i Y
^p
±
mF
/2S
V
^4
7u
FX
2S
V^p
~. . lu
F
RE
CT
2
^I
N
"°
<I
2S
_>
TW
10
M
D
U3
LM
320T
-12
R2
\3
1K
^
LE
Djé
k.
D2
r LE
D
> R
3
£
^
1K
f E
SC
UE
LA
P
OLIT
ÉC
NIC
A
NA
rTO
MO
l
FU
EN
TE
S D
E P
OL
AR
IZA
CIÓ
N 5
V.
12V ,
-1
2V .
Sj.z«
D
ocum
en±
N
um
fo«r-
R
EV
A
FU
EN
TE
. S
CH
E
S
D-»
t«:
Ap
r^l
14,
1994
tS
he
wt
1 o
f 4

D4
LM336.SO
CIO
-LSOuF/lSV
R4470K
SW3
SW 2POS
R18
1K
Pl1OOK
XC12
-T~-. C1J-
. iuF
I
. luF
ESCUELA POLITÉCNICA NACIONAL
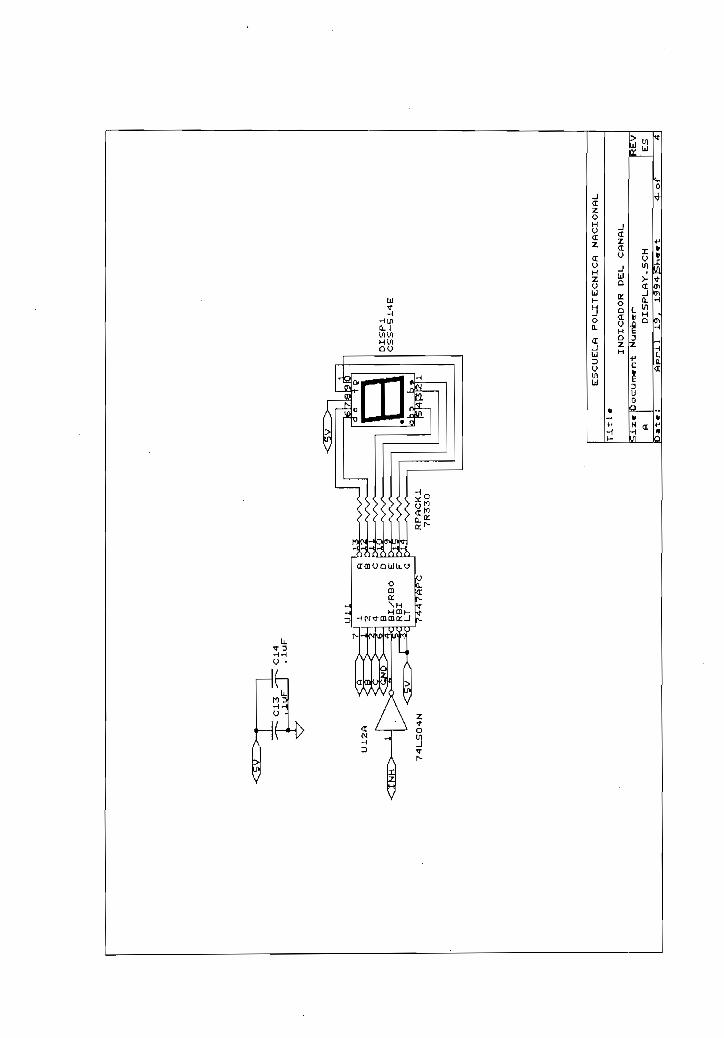
74US04N
DISP1
CSS-S14E
Titl.
ESCUELA POLITÉCNICA NACIONAL
INDICADOR DEL CANAL
(Siz*
ADISPLAY.SCH
-J. 1 19 . J.994 gh««
ES
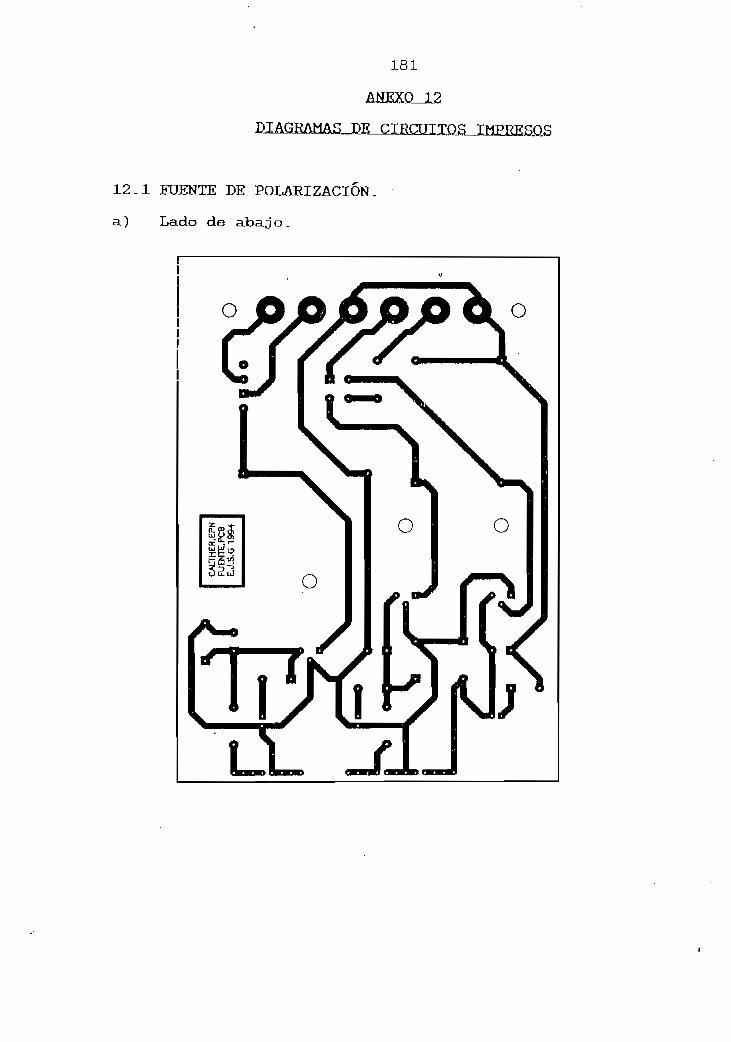
12.1 FUENTE DE POLARIZACIÓN,
a) Lado de aba,j o _
I
O o
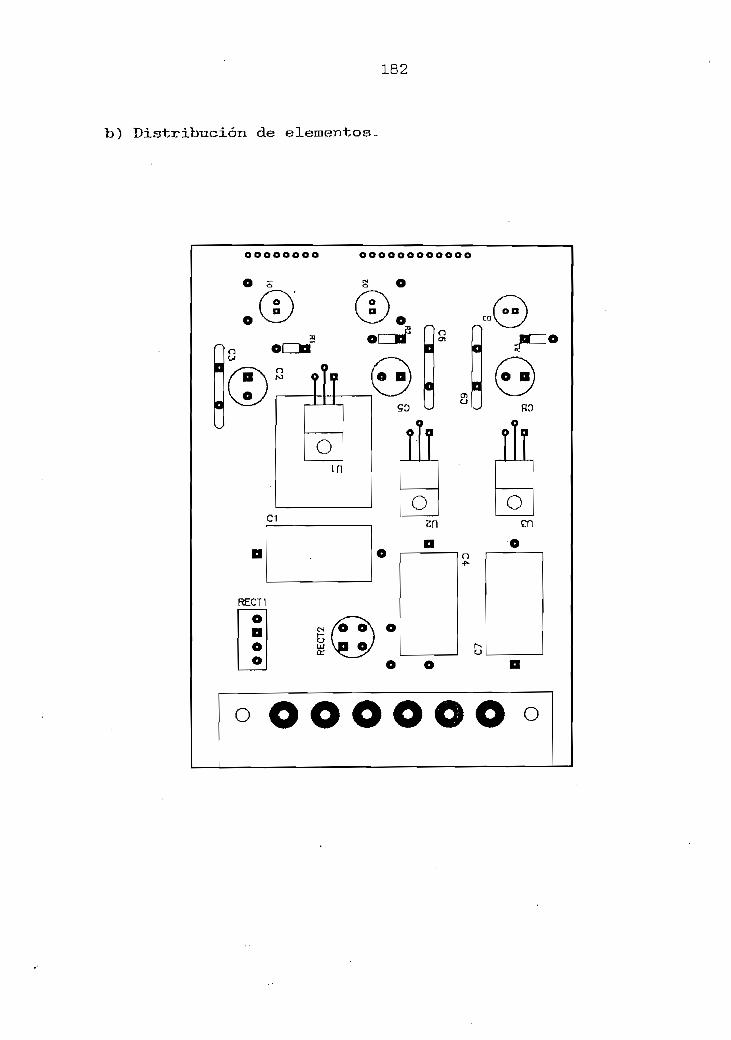
182
b) Distribución de elementos _
oooooooo oooooooooooo
C1
RECT1
OaOO
Otn
tJ1
SO
.pa
O Bl
so
osn
nen
O O
O O O 0
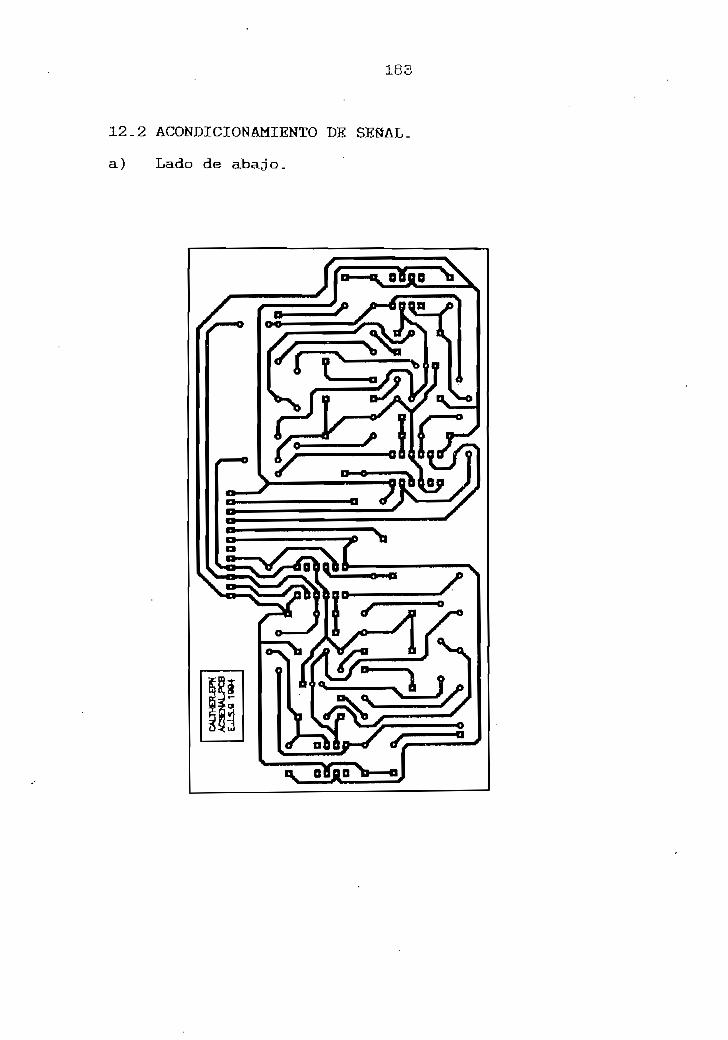
183
12.2 ACONDICIONAMIENTO DE SEffAL.
a) Lado de abaj o _

184
b) Distribución de elementos_
BMB
o -<nOoodia01 7A
oa
aa
tBD
a oPM O
P1A
a oPZA o
O 0
of~1ng
oBdO
n o PB80PPE
O ;o a
O ,jo o
o «O D
000000 O5. K
oans 2L3onao
¿ta
gtaDI 5OCBD14 i
OtZlB Oí ID
o (3D^-^B
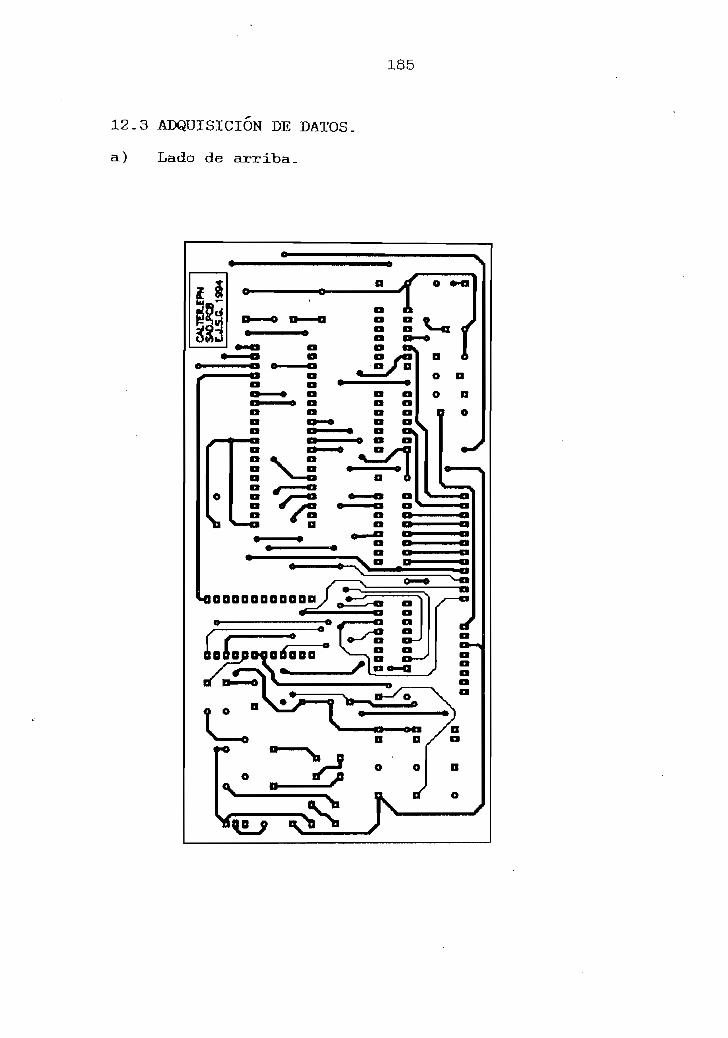
185
12.3 ADQUISICIÓN DE DATOS,
a) Lado de arriba.
TÍ frO

r».
an
o
aooo
Qoaa
oooo
Doaa
aoaa
a n
a o
v*r
oaoo
aai
QQOO
QQU—
Q ao
qgaá
áa—y
oooo
gá^o
—^
a
o /'f
lBB
flB
(hi
«B
BB
BB
áa
o|^
pB
BB
BB
a a
Ofl
^B
fláB
a o^—
o
00
00
00
00
00
00
B
BB
Bfl
fiB
o.
O
CD

CO
1 to 0 ff 03 E 0) H 0) Oí Tí
*0 •rí Ü fi .—i
•n M -p
Rf|l
/^^
\ a^
0
S°
* O
BO
OO
OB
BB
OB
B O
OO
OO
OO
D /^
\i •—
\
n 1
1 n
*
\
O
^—
• -
B^
O
O
' j--
»^o
• w
o
/'A
,(o
| O
OO
BB
Oo
^O
OB
BB
BD
^ Jo]
00
00
00
0a
,,o
O
OB
OB
BB
O g (
Sf«
\5v ®
K
0
.
"
/-T
^ q
• o
«
w
A»
• /
OA
^•
o
e
oo
o
( I0
'•
a
•
V '
O J
(o
pT)
U1
0%
9
X^-X
^
BB
BB
BB
BB
BB
BB
BB
flB
flB
Ba
OÍ
w
1i —
i !•
"
-<
D
•
« J
•
0
•o
-•
•
o
c o
o e
o *
1 «
»1 —
' I
* o
, -^
^
BB
BB
BB
BB
BB
BB
BB
BO
BB
BB *
a
»(o
~~
o)*
°
o«
O
ZD
*
*
°
•
**
CQ
B;
a o
0
9l°
**
x^~^v
OO
f • \
O/
•.
í -&
1
í TI
o •
V • /
-1
0
^-*
S
EO
0
13
D
OdB
«
OO
$'-"
o
QB
o)
co
«
O
JB
d]O
L- r=
r
co •H fi.
«JJ|
] Oce
»o[
in
* =oí
in
1
B»
M
CM
T HT)
••
. °n
D 6
t

188
12.4 DISPLAY INDICADOR.
a.) Lado de abajo y distribución de elementos.
DooeBoooDDQOO
BB°B°

189
El sistema CALTHER está formado por un gabinete metálico que
contiene en su interior lo siguiente:
- 3 tarjetas de acondicionamiento de señal, ubicadas en la
parte superior del equipo,
- 1 tarjeta de adquisición de datos, ubicada debajo de las
tarjetas de acondicionamiento de señal.
- 1 tarjeta de fuente de polarización , ubicada debajo de la
tarjeta de acondicionamiento de señal.
- 1 tarjeta de display indicador, ubicada en la puerta
lateral.
- 2 transformadores , ubicados en el suelo de la caja.
- 6 pares de borneras para conexión de los termi stores,
ubicadas en la puerta lateral .
- 1 conector DB9 para la comunicación serial, 1 conecto** de
tres patas para la conexión con la red y 1 fusible
exterior. Todos estos ubicados en la parte latez^al
derecha del equipo .
La figura 12.1 muestra el contenido interno del equipo.
Exteriormente el equipo presenta al usuario un panel frontal
con los 6 pares de borneras para conexión de los termistores,
véase figura 12.2. Además se muestra el display que indica el
canal seleccionado para la medición de temperatura, donde cada
canal tiene su propio interruptor (ON/OFF) que habilita el
termistor para la medición.
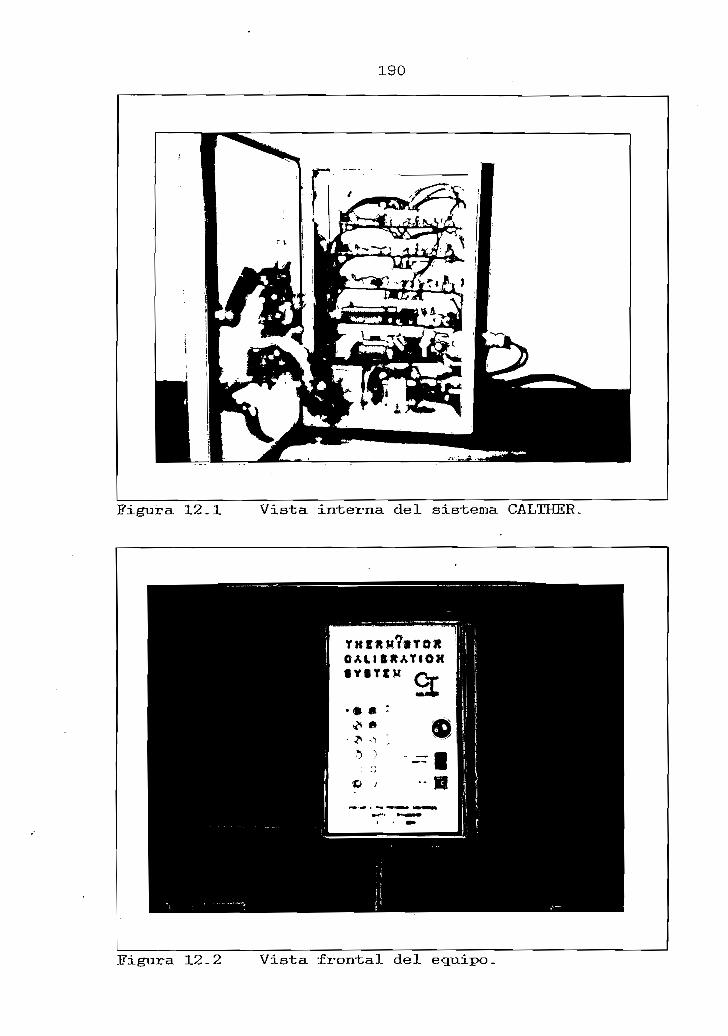
190
Figura 12.1 Vista interna del sistema CALTHER.
YKIft!t?*TOftC A U B K A T I O Ht r i T C W
Figura 12_2 Vista frontal del equipo.

191
En la figura 12.3 podemos ver al sistema CALTHER operando
conjuntamente con otros equipos (Instituto de Ciencias
Nucleares de la Escuela Politécnica Nacional). El sistema se
comunica por un cable serial con un computador IBM, desde donde
se manejan los canales de medición y se generan las tablas de
calibración. Los termistores son sumergidos en agua a una
temperatura constante mantenida por otro equipo.
Figura 12-3 Opera.ción conjunta con otros ecjuipos_

APÉNDICES

192
Los 'siguientes términos definen las- caractei'isticas de los
sistemas de medida. Algunas definiciones empleadas se
relacionan con las sugerencias hechas por la SAMA1.
Acondicionadores o convertidores. Son circuitos que reciben
una señal de entrada electrónica procedentes de un instrumento
y la modifican a sefíal de salida normalizada2.
Alcance. Diferencia algebraica entre los valores superior e
inferior del campo de medida.
Banda de error. Banda de desviaciones máximas de los
valores de salida respecto a una linea de referencia.
Calibración. Ajuste de la señal de salida a valores deseados
dentro de una tolerancia especificada para valores particulares
de la señal de entrada.
Campo de medida con elevación de cero. Campo de medida en el
que el valor cero de la variable medida es mayor que el valor
inferior del campo .
SAMA (Scientific Apparatus Markers Association) en sunorma PMC 20-2-1970.
El protocolo MAP aplicado al control de procesos debecumplir con las características de señal de 4 a 20 mAy alimentación a través'del mismo par de hilos.

193
Campo de medida con supresión de cero. Campo de medida, en el
que el valor cero de la variable medida es menor que el valor
inferior del campo.
Clase de precisión (K). Representa la precisión garantisada de
un sistema de medida. Los aparatas tipo laboratorio tienen
clases 0.1, 0.2 y O.5; mientras que los equipos tipo panel las
clases 1, 1.5, 2,5 y 5.
Controladores. Son circuitos que comparan el valor de la
variable medida con un valor deseado y ejercen una acción
correctiva de acuerdo con la desviación.
Corrección. Es el valor de magnitud igual al error absoluto
pero con signo contrario.
Curva caracterisitca. Representa gráficamente la señal de
salida en función de la señal de entrada-
Deriva. Variación de la sefíal de salida que se presenta en un
periodo de tiempo determinado mientras se mantiene constante la
señal de entibada. Se suelen considerar la deriva de cero y la
deriva térmica de cero, está expresada en % SFE,
Desplazamiento de ce.ro. Cambio en la señal de salida
correspondiente a la magnitud cero dentro de un periodo de
tiempo especificado. El desplazamiento de cero se caracterisa
por ser un desplazamiento paralelo a la curva característica.

194
Desplazamiento de sensibilidad. Cambio en la pendiente de la
curva característica, se especifica como el valor máximo
observado durante un periodo de tiempo.
Elementos primarios. Son elementos que están en contacto
con la variable a ser medida, absorben energía del medio para
dar al sistema de medición una indicación en respuesta a la
variación de la variable generando un cambio de presión3
fuerza, posición., resistencia., etc.
Elementos de integración. Son circuitos integrados formados
por varias compuertas, se clasifican de acuerdo al número de
elementos:
SSI formado por pocas compuertas.
MSI formado por muchas compuertas.
LSI formado por un gran números de compuertas.
Elevación de cero_ Cantidad con que el valor cero de la
variable medida supera el valor inferior del campo. Puede
expresarse en unidades de la va.riable medida o en %SFE.
Error absoluto (ea)- Es la diferencia entre el valor
obtenido en la medida (Am) y el valor verdadero o real fAr) de
la variable, siempre y cuando el proceso este en condiciones de
régimen permanente.
e * \Am~AA

195
Error de cuantificación. Es la desviación máxima entre la
salida de un conversor A/D de n bits, ideal y la linea recta
correspondiente a un conversor A/D ideal de un número infinito
de bits.
Error dinámico. Es la diferencia entre el valor instantáneo
y el valor indicado por el instrumento. En condiciones
dinámicas el error varia considerablemente debido a g_ue los
instrumentos tienen características comunes a los sistemas
físicos, lo cual da lugar a retardos en la lectura del aparato.
Error de angularidad. Desviación de los valores de la señal
de salida con relación a la curva característica.
Error de cero. Desplazamiento constante de todos los valores de
la señal de salida con relación a la curva característica.
Error de multiplicación. Aumento o disminución progresiva de
todos los valores de la señal de salida con relación a la curva
característica.
Error medio. Media aritmética de los errores absolutos en
cada punto de medición.
Error relativo. Relación entre el error absoluto y el valor
real de la señal de entrada:
^a Am - Ar: K , » .
r Ar Ar

196
Errores accidentales _ Son aquellos que nacen de una
combinación arbitraria de un gran número de pequeños sucesos,
son de naturaleza errática y poseen un comportamiento
irregular. Estos errores pueden estudiarse aplicando métodos
estadísticos, de modo que la señal de entrada sea la más exacta
de todas las medidas.
Errores ambientales. Errores sobre los resultados de
calibración influenciados por el ambiente físico donde se
realizan las pruebas. Algunas influencias ambientales son:
temperatura? presión, humedad, vibraciones mecánicas,
fluctuaciones de voltajes de alimentación, etc.
Errores instrumentales. También llamados fallas de calibración
y son debidos a fallas en la construcción del instrumento o
provocados por el desgaste y deterioro de elementos internos o
también por el abuso en la utilización del mismo.
Errores sistemáticos- Son aquellos errores que pueden
evitarse o corregirse, son debidos a confusiones, defectos de
los instrumentos, influencias del ambiente ? mala técnica de
medida o falta de calibración.
Estabilidad. Capacidad de un instrumento para mantener su
comportamiento durante su vida útil.
Estabilidad temporal a la salida. Cambio ocurrido en la señal
de salida manteniendo constante la señal de entrada y a un
valor distinto de cero.

197
Fiabilidad. Probabilidad de que el sistema de medida
continúe comportándose dentro de límites de error. Caso
contrario el equipo necesita -ana calibración.
Fin de conversión. Señal digital q-ue informa al
microprocesador que la salida del conversor A/D es válida.
Histéresis. Diferencia máxima en los valores de salida para
el mismo valor de entrada, generalmente expresado en %SFE.
Instrumentos ciegos. No tienen indicación visible de la
señal medida. Ejemplo: alarmas, interruptores. Poseen una
escala exterior con la cual se ajusta el punto de disparo
cruzar la magnitud medida el valor seleccionado.
Inicio de conversión. Señal digital para un conversor A/D
que inicia un ciclo de conversión.
Instrumentos indicadores. Disponen de un Índice, escala
graduada o indicadores digitales en los que puede leerse el
valor de la variable medida.
Instrumentos registradores- Grafican la curva característica
con trazos ciz^culares, rectangulares, alargados, etc.
Linealidad. Es la aproximación de una curva característica
a una curva especificada.

198
Linealidad basada en puntos. Linealidad respecto a -una línea
recta entre los puntos correspondiente al cero y al 100% de la
variable medida, .expresado en forma de desviación máxima.
Linealidad con pendiente teórica. Comportamiento de la curva
caracteristica respecto a la linea recta entre los puntos
extremos teóricos _
Linealidad de mínimos cuadrados. Linealidad respecto a la
curva para la cual la suma de los cuadrados de las desviaciones
de las lecturas de la salida respecto a los valores
correspondientes a la linea recta calculada, es mínimo.
Linealidad de puntos extremos. Linealidad respecto a los
límites superior e inferior del rango, siempre y cuando las
tolerancias de los puntos extremos están especificadas.
Linealidad independiente. Comportamiento de la curva
característica respecto a la mejor línea recta gue es la línea
intermedia entre las dos lineas paralelas en cuyo interior se
mantienen todos los valores de salida de una curva de
calibración.
Precisión- Define la tolerancia de los errores cometidos.
La precisión varía en cada punto del campo de medida, sin
embargo el fabricante la especifica en todo el rango, indicando
a veces su valor en algunas zonas de la escala. Cuando se
desea obtener la máxima precisión en un punto determinado,
puede calibrarse únicamente para este punto de trabajo de modo

201
el sistema trabaja favorablemente, exceder los márgenes error
establecidos-
Tiempo de conversión- Es el tiempo que necesita un conversor
para la realización de una conversión.
Tiempo de crecimiento (tr). Tiempo requerido para que la
salida de crezca del 10 al 90% ? del 5 al 95% o del O al 100% de
su valor final.
Tiempo de respuesta (ts). Tiempo requerido para que la
salida alcance y se mantenga alrededor* del 5% o 2% del valor
final.
Tiempo de retardo (td)- Tiempo que tarda la salida en alcanzar
por primera ves la mitad del valor final.
Transductores. Son elementos que reciben una señal de entrada
función de uno o más fenómenos físicos y la convierten
modificada a una determinada señal de salida.
Transmisores. Son circuitos que captan la variable de un
proceso a través del elemento primario y la transmiten en forma
de señal electrónica. Se puede utilizar un microprocesador en
la transmisión por las ventajas que posee de rapidez de
cálculo, pequeño tamaño, flabilidad, permite además la
utilización del transmisor con señales de salida digital, lo
cual facilita la comunicación entre el transmisor1 y el

202
controlador.3
Umbral. Cambio mas pequeño de la variable a medir necesario
para conseguir un. cambio en la señal de salida vaz^iable medida
expresado en unidades de la variable medida.
Zona muerta. Campo de valores de entrada que no hacen variar
la indicación o la señal de salida; se expresa en %SFE.
La digitalisación de señales y su envió a los sistemasde control, está experimentando .un proceso denormalización a cargo del Comité SP5Ü de ISA(Instrument Society of America),
APÉNDICE 2
TABLA PE CALIBRACIÓN BEL TERMISTOR PATRÓN 499

CPLÜRIMETER NO. 499CflLOKlMETER FflCTOK:
T h e r - m i s t ü r c a l i b r a c i ó n W e d n e b d a y 1992-02-19-i. 000 | < G y / d e g r t í e
9 :46
bOO510Í5SO530340
550560570500090
600& J. 0&£0630640
650660670680690
700710
t* 720730740
750760770780790
soo810eso830840
850860870sao890
900910920930940
í50 .49.49,4a.43.
47.47.46.46.45.
45.44.44.43.43.
4S.4£.42.4 1 .41.
40.40.39.39.39.
3S.38.38.¿7.37.
37.36.36.35.35.
35.34.34.34.34.
j vi.vi vi.
vi vi.
3£.tic' .
1
59994133£9
75ci'c'(69*ia68
1971£478viC.
37 •4/1005816
7535955618
804306/O35
0065319764
3£99633605
71344158556
150,49.'i '•} .48.48.
47.47,46.46,45.
45.44.44.43.43.
43.4¿.4 í .4 Í .
'll.
40,40.39.39.39,
38,38.38.¿{ .37,
36,36.36.35.35.
... c.
34 .34..54.34.
-.i vi i
33..-!• til .
vic .
til- •
c1 -ivJvi
9 'i
3b74J¿4
691664l-.¡63
14061973£8
833'-)965412
/I:-;i9 a5314
/b3903b./\ j.
96ce
289461
Sil96&4330£
7£41!;•Se'O-'/
c
50,4':).4'-3.48.48.
47,47,46.46.45.
45.4 4 ,44.43.43.
4£.42.41 .4 1 ,41 .
40.40.39.39.39.
¿B.3Ü,37.vV .37,
36.36.36 .T^
35.
w5 .3 4 .34.34.33.
VÍ vi .
vJ vi .
vi vi.
Wll ,
ti l" ,
47aa3073.18
641159oa53
10621568C'vi
79359£5003
6.7
27884910
/336996 vi
28
9358¿49158
•"'tíj93613099
69380979LÍO
¿50.49,4 -j ,48.48,
47.4 7 .46.46.45.
45,44 .4 4 .43.43,
42.0¿,4 J .41 ,41.
40.40.39.39.39 .
38.36.37.37.37.
36.36.36.35.35.
~?K
30.¿4.3n ,viii.
VJv_' .
vi vil
33.»Í C .
VÍC .
41i/íC.
¿46013
5906540354
0357106419
7431884504
63c! <.'.•
84 '4507
69JiC
95faO
£4
8955c! 1
8734
£29058i- /96
0635u&76•ifí
450 .49 .•+'•).48.03.
47.47.46.05.45.
45.44 .40.43.43.
42.4c.41.41.41.
40.40.39.39.39.
38.38,37.37.37.
36.36.36.¿,'vJ.
3t~j.
35.34.34.34.ti'ii •
VÍ. i .
livJ .
33.¿£1-JfC .
3Lí76UDC
07
5301499849
00dui035914
7026334100
3919804103
65c'892vJ&
¿i
3651173451
1937552493
63vid
03744o
u
50.49.49.48.4Ü.
47.46.46.43-45.
44.44.44.43.43.
42.4S,4 1 .41.40.
40.40.39,39,33,
38.33.37.37.37.
36.36.36.35.35 ,
35.30.34.34.viii .
-.JiJ." .
vi vJ.
wO .
ta.'Í*i -
J-L .
1
29701357Oc
4095449344
9547015510
65ce
793796
3513763799
c-c'£5885217
as43.148143
15333c'c'l90
593000714¿
e30.49.49.48.47.
47.46.46.45.45.
• i 4 .44.43.43.43.
42.4c.41.•U.40-
40.40.39.39.33.
38.38.37.37.37.
36-36.36.35.33.
35.34.34.34,¿¿j ,
33.vi vi.
32.vi'C',
vi iT. .
i
CvJ
64075196
4390398839
9043'-365005
611875¿ vi
92
311172VÍÓ
95
5821354914
7945117745
1 C*j. i_
3049t u87
56£797633S
150,49.49.'iU.47.
47.46.46.45.45.
44.44.43.43.43.
42.42.41.41,'Hi.
00.40.39.39.33.
38.30.37.3 / .37.
36.36.36.35.35.
35.34 .34.34 .vi vi .
vi VÍ .
vi vi.
vlC"
32.•.'j 1 - ,
1759Oíí4691
3783348334
86vill'
914601
571371£988
4/0768299S
5417814310
7341077441
0977461484
53£49465,i6
£50.49.43.48.47.
47.46.46.43.45.
44 .4 4 .43.43.4£.
4£.42.41.41.40.
40.40.39.39.33.
38.38.¿7.3/.37 -
36.36.36.vi!j.
33.
33 .34.34.34.vikJ .
Jívi .
vivi •
•-ÍC «
vl'Cl
tiC i
iu53%4036
ví'C.
SO297829
81t'jvl'
874196
tr^-ti.JC
0966£534
4303642688
5014774£07
7233047133
06/44¿1.131
50239162vJW
tj
30.49.43.48.4 /.
47.46.4 ü) .'IJ.4S.
44.4 4 .43.43.4£.
4£.4£.41.41.40.
40,39.39.39.38.
33.33 ,37.vi / •
37.
36.36.36 .vi^l.
villf .
35.34.34.34.vi' vi.
vi vi .
« ' v.'; •
t"1t-i C •
32.V./C .
Í
0!Jf\?"¡ u't L-.Jv.
30
£7X3c* /•73¿4
7629Se3792
4305b¿£179
3999602£34
4710703803
683401be.ó'j
0371¿"i
Oii78
f\fJí-8r)
í-jS,>f.)
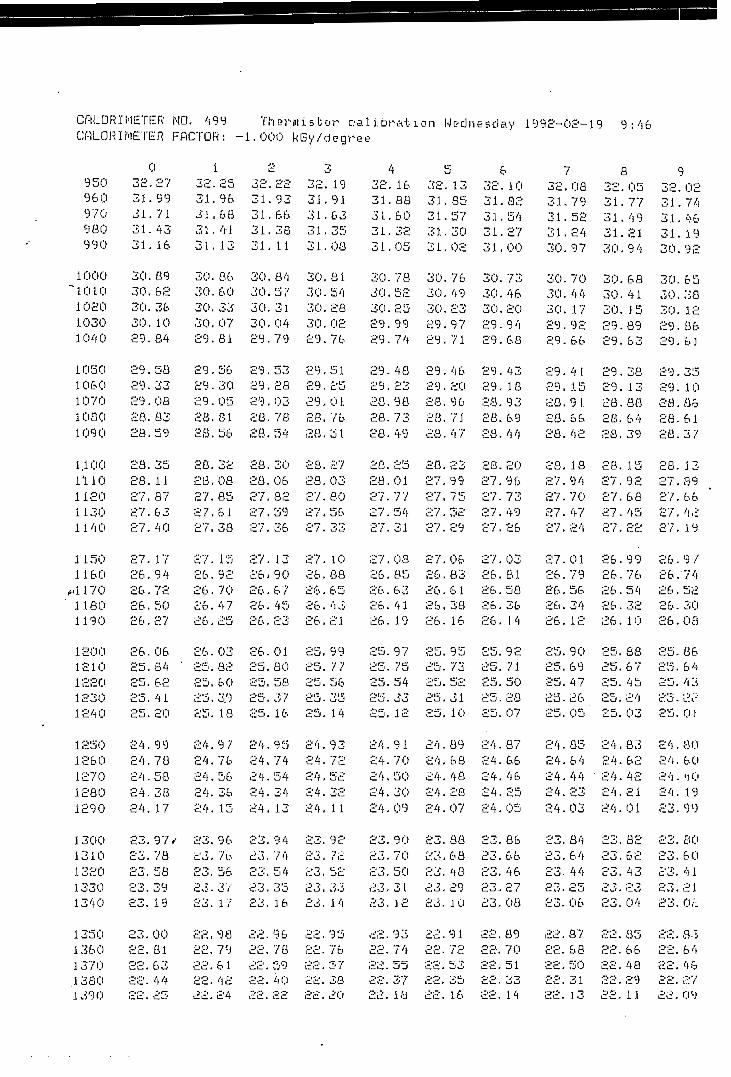
OJ
-3-
en 1—1 I CU V
-,' I cu 1—1 fu TD ifi iü TJ ÜJ
O •-i
-P •í JU .-i
-Urd
c;
ü
5- cní-
cu
O
X!
Oí
>.
•¿ &
m
o
i — ,
.— ,
1
en
¿e<•
p
. b
o
cz2
LL
££ o:
LU
UJ
UJ
UJ
n o
u u
fu <
r
CU
T
H
ro r
o
10 í
.<~
. ¡X
.03
. .
fij
-.-i
ro r
o
cp
cr.
OJ
-rt
ro r
o
*
03
CU -t
ro r
o
ro L
OT
- C
O
OJ
-rt
ro ro
1-1 0
3
CU -i
ro
ro
—i
enro
-
-0
> —
iro
ro
cu
roCU
en
OJ
ni
,-tró
" ro
</j
oj'CU
en
Oj
*-<
_
ó-i
cr«
CU
t-!
ro r
o
LO
OJ
en
en
•£ ^
— !
—
(
ro
ro
¿n
•»-•
-í-
CU
—¡
-i— i
ro
ro
in c
ui-<
1—1
ÍO
ÍO
<J~
;~-
[f3
Ó
J
ro
fo
r--
oLO
ÍO
ro í
o
— *
— t
ro r
o
o ro
— i
1—1
ío r
o
•Jj
03•jj
roI-H
•— <
ro
ío
G3
-—
•-.0
-i~
• £
•
—i
ÍOr--
-T
• — f
-<— i
'O
ÍO
N. C
Oen
¿r
-
cu ro en -~ ro en : ÍO OJ ro to ro 9? ro — <
ÍO ro — i
i— •
ro — 1
-— t
ro <r> en
!H
CCI *
ro r
o
O3
-H
_ ro r
o
ro
ro
ÍO
OJ
ro
ro
:o r
o
03
O"
!"-
tO
O O
ÍO '0
03
LO
o o
ro :
•-;
—
,
fO '0
Cj
• rj
ío ro
en C
U03
uj
ro r
o
i-t T
*
OJ
...ü
J
ro c
u
ÍO
en^
03
— fO
CU
: c
u
C-
enÍO
CU
CU
en
O
eníO
O
J
CU
er-
ro
OJ
!O
cr»
OJ
cr.
íO
OJ
03
OJ
CU
O
ro r
o
-« -
í-ÍO
O
— ?o
ro
ro b
ro
ro
ro ^
ro
fo
cu r
o--i
— »
2 OJ ro en CU en OJ
03 OJ
OJ
OJ cu r- en CU —1
03 OJ
Q3
en OJ
O *s"
•*— <
10 cu eo ro en CU en CU ro OJ
ÓJ
OJ cu en CU i!!
CP CU OJ
LO "
2
c§
cr.
coCU
CU
ro c
a
en
cocu
-:u
T-:
en
cr-
caOJ
CU
cr-
enCU
CU
en
o"'
CU
Cu
ÓJ
en
en
C3
CU
ru
Cu
O
cr-
enCU
¿"
U
O3
JOO
J O
er-
er-
CU
OJ
cr-
enOJ
OJ
r- j
03
cr
enCU
OJ
1—1
03 OJ
CU Oj
CU OJ
03 CU CT1
ÍO 03 OJ
-IJ en cu 03 r*- 03 cu CO Oj
ÍO 03 03
CU 03 ^
¡O 03 CU en ro OJ cu 03 OJ
-3-
CQ CU m co CU f'J •3"
CU ;JJ
CO 03 OJ en -— <
•¿i
03 OJ
ij'J CU 03 -r-1 03 CU OJ
03 CU ro cu 03 CU ÓJ 03 cu CU CO OJ
fO 03 CU CU ro 03 íO ro 03 cu X.
en ÓJ
CU cu ÓJ
en OJ
tn í"-
CU i~t
03 CU ÍO 03 OJ
C3
CU 03 03 —i
03 CU j-<
Oj
-"'J
Cn
ÓJ
ÓJ
ÓJ
CO
iO
CU
OJ
-í-
CU
CU
O
J Ó
J
CU
OJ
ÓJ
r-- -
3- oj
cu c
u cu
LO r
u en
r-- i
o oj
ÓJ
ÓJ
CU
I**-
^S*
T-i
r- 1
/3 ro
ÓJ
CU
Ó
J
0
OJ
-'Oaj-
in
ro
cu c
u cu
co
10
ro
ÓJ
OJ
ÓJ
in -•
c3
03
•-.£
ror-
r--
í
í-
rO
O03
<¿
j <-
r^- r
- r^-
ÓJ
CU
C
U
CU
ro
<-
-r~í
-^
t T—
)i-H ,-l
— i
•r-
:--
CU
Cu
OJ
CU
-H
CT'
cu c
u
íO
O C
O
r- o
jcu
cu
O 03
ÓJ
CU
co i
nO
03
OJ
CU
O
03
ój rj
ro O
— <
en
r---
ojCU
CU
¡n c
u—
i en
ój
Oj
— .
en
r*- o
jcu
cu
--H
---i
•f)
t'O
cu c
u
-3"
'"ij
10
roOD
O
JO
J C
U
U j
fO
CU
CU
03
OJ
UT .'0
cu c
u
•— ! O
j
•D
ÍO
ru
Oj
ÍO
"•"<
vTr
<T
OJ
CU
\n r
o
O
OJ
cu c
u
uj
-T
<.£•
vDO
J O
J
C'J
-'U
cu o
r-~ u
";
OJ
CU
r- c
a1
-r-l
O OJ
OJ
OJ
CU OJ
— 1 cu OJ
OJ
OJ
en Oj
OJ
OJ
OJ ro OJ
OJ
OJ
LO CU OJ
OJ cu cr-
eo cu 03 03 OJ
en CU CU en IO CU m cn CU en ül
CU er-
en CU
1—1
cu ÍO cu OJ cu cu
--h
to Ój cu en IO OJ in OJ
ÍO IO -•'J p tJ~.I
cu cu ¿0 Ü"3
CU
03 LO OJ <J- 03 CU cu
v
C'J
LO
¿O••'U
OJ
<r
OJ
iO
uTcu
cu
h-
CJ
tn 1
0cu
cu
O 0
3ÍO
O
J
cu c
u
ru
— n•O
'O
OJ
r,j
IO
'O
cu c
u
oj p
cu c
u
10
-OCU
O
J
•j~í
LOcu
cu
CU -i
tn L
OO
J O
J
CU
ÍO
OJ
CU
ÜT cu ÍO o U"J cu u~3
OJ r- cu 1—1 cu cu IO cu 1—1
iO cu OJ cu 03 I— !
i/"ü cu >:Ú ÜT
OJ cu
i cu 03 cu CO OJ
03 OJ
en 03 en OJ ro cu er-
OJ
en en OJ •O CU
o cu cu •Jj
cu OJ
;*; '
03 CU j-v.
CU cu f*-
OJ <r <r OJ
CU 03 r- cu OJ
CU
O c
r.
CU
OJ
ftj
1—1
-3-
CU
<r
<rCU
CU
-3"
Í'-J
-3-
CU
CU
OJ
Oj
Ü"J
•c- c
u
CU
OJ
CO
G3
<- c
u
•'U
CU
¡n
ío<-
<r
nj c
u
•u c
u•S
J ÍO
•T
<rO
J C
U
LO
ro
¡"tj
CU
•¿i
-úüi
ro
cu c
u
03 0
3LO
ro
cu c
u
r- 0
3cu
cu
en ro CU ro OJ
-3-
OJ
OJ cu cu ro — i
-r LO OJ
CU en OJ
Clj ro cu cu 03 i'O CU 03 ro cu 03 ro OJ
03 03 ro cu er- ro CU Cu en ro cu -T cr-
CU en ¡x-
en ro cu o ro
3 ro CU OJ ro cu OJ ro OJ
í_O co vD C*j
íO OJ
'!Ü •O •': ' -ú r-1 :ú 03 .-o CU -^
~Ü fO ro Cu <r ro cu OJ -r ro .'O cu LO ro cu í'"1 cu i'O cu ro cu 03 ÍO OJ
CU ÍO
"U ó
ro r
ocu
cu
cu ó
ru c
u
Íf3
Oj
cu
oro
ío
OJ
CU
r- 0
3O
J O
ro r
oO
J ^J
cr-
•"*O
J -i
—
Oj
ro ^
"Ú
'":J
fO
-OCU
''u
LO
OJ
ro -
Ój
ÓJ
JO n
'0 r
oO
! C
U
er>
enro
*-«
ro ro
CU
OJ
ro
ro
c¿ CU cu f-J
03 OJ
en CU OJ ro Sj ir- CU
:'U OJ "U '"U CO cu ro cu Ul
ro
!~C
r <j"
CU
CUcu
cu
Oj
03
OJ
CU
OJ
CU
03
OO
j ¡f3
OJ
CU
cu c
u
•O
—i
r- LO
cu c
ucu
cu
CU
ro
cu c
ucu
cu
¡
10
cu :
u'"U
CU
,15
f-*-
í^-
IO
CU
O
Jcu
cu
03
en
CU
C
"CU
'U
í1*-
O
J
OJ
CU
cu c
u
CO
Oj
CU
O
Jcu
cu
oj
-r-^ro
ro
f"- í
CU
'"'j
l'U M
j
en
—i
CU -i
cu c
uO
J í"ij
r-t
roro
-.
cu -
:uO
J O
J
ro <
r
CU
OJ
OJ
OJ
OJ
Oj
OJ
OJ
•N
CO
¡"U
Oj-
eo
o
CU
OJ
OJ
OJ
O O
J• <
*• cu
OJ
CU
CU
ru
CU <r
<r O
J
OJ
OJ
OJ
-M
<-
oj
CU
O
Jcu
cu
O3
(7*
ro -
o

«Jj
-f en T cu ! OJ en en i—i
T) ÜJ
•o ÜJ
C O -p rtí JD -i-t Ü
í- cr!L
ci
o
*o
.C 8
í—
O Jt 'a-
' ••
en C
E;-- p
_-
U
^1 U
.
ce o:
• >i
tt !
¡— i
—
E! E
ce
DJ:
C3
CI
_J _
JC
J C
J
— 1
en cu 'O cnCO
1— i
CU kD en — -t
OJ
CO enÍO
—i
CU O
<r ° OJ cu OJ >~«
rocu O
J cu 10^
'-'
¡-_
—
*— '
cu o o
Í2 T-t
OJ
u!
,*x.
T-(
CU CO f-s.
cu ¿ó TH OJ
OJ
OJ
.— i
OJ <r 03 ¡O aj
TH
UJ
r.
aj
en OJ o 1—1
<r
ir ir - CC IjT 0. •-'_ cu -—I
cu -u"
UJ
TM cu «.n «o —(
¡ •Jj
1— t
cu en •jj
TH ,_, r*- V
-•
CU
r- o
O
J LO
ro
-:u
o c
o
cu c
u cu
o.
ro c
u o
ceT
-í
1-1
T-(
O
TI
ro
<£ c
o<r
cu
o c
o
CU
CU
OJ
CU
OJ L
O
r-
o<r
cu
o
e1*
1
-•— i
— i
•'-
'OCU
CU
CU
O
J
<•
í--
en O
J•íf
C
U
O
cr"
'-f
— !
í-i
O
OJ
OJ
OJ
'"t1
uj
03
-i ro
<r
OJ
*-t
en
-i
^H
r-i
O
cu c
u oj
cu
03 o
ro
LO-r
ro . .
* c
-
r r
1
r P
O
:*U
-T h-
IO i
'o
--i
enT-
, ,-,
TM
oO
J C
U
OJ
OJ
•-i
<"
vD e
nij"3
fO
•— .
en
rl r
* r P
ro i
o co
-u3
ro
TH
o
O
•"•
>"""•>
•"••
ío <
r \n ^ i
'-ú .
o-ro
'-*
ai
cu c
u ¡X!
en
CU -
j~J
03vú
UT
ro
-i
O O
C
1
O
r- 'ÍT
J ío
cu
cTi
6~j ai
cu
ro
^n e
n cu
r- m
ro
cu
CU
CU
CU
O
J
<r r
-- o
ro
r- iri
--
cu
OJ
'ÍJ X
1
CU
0
en O
J
IOr--
ífj
<r
CU
O-
O O
O
OJ
OJ
CU
O
J
o -i
<r
r--r*-
-jj
-~
cu
o o
o
o
O
CU
ID
0303
v£
i <•
OJ
O O
O
O
OJ
OJ
CU
C
U
._,
.— f^
.—
.03
\sj
<•
ro
o o
o
o
ío
«jj
en
cuco
-jj
<r
ro
0 0 0
0
.•~.
.— , iQ
. .—
,
r^-
03 ¿
n o
<r
-í-
r io
•~> CU CU o ro OJ in c- O-
0!
en •-'
.— .
cu ri O1
¡*r|
.— .
OJ ro • o in T-,
O ,--,
T^
IO
03 ^j
ij-J
en
en e
n
10
«T-
cua'j
-J
j in
en
en
en
03 r-
ÜT
en
cr-
en
03
OJ
«Jj
03 f-
ij?
iT*
en
en
O -i"
i--
en
!*-
LO
en
en e
n
CU
ü~J
enen
r~
LO
en
en
cr-
— i
-.-i
i
'r'
f^-
•Xi
en
cr-
en
LO
en
cu
cr*
CT'
en-^
^
•— -1
-—
4
p.
O
<i-
en 0
3 sc
-cr
- cr<
en
CO
CU 'O
en
03
aj
en
cr.
en
,— ,
£-,
.-",
OJ
fO -í-
UO
LiT
LIO
í¡j
en
'O s-
ro
•-(
O
-n3
en c
r- CT
- eo
i— <
— -<
-i— i
-i
•Jj
O
<•
O3fO
C
U O
eo
er'
en
en e
o
03
OJ
<&
Oro
cu
o
en
cr-
en
en
co
en
ro
í-- C
UfO
C
U O
en
en
en
en
coT-l
-r
-<
—-t
1
*-*
'j"3
en
(O
er-
en
en
03TH -^
T-l
-H
ro
r>-
T-,
uo•cr
oj
—i
en
en
en
en
coT-l
1
••— i
i—
(
,*
;*
;j«
.
-^•>
en
e^
en e
o
.3 o
<-
03
•c-
ro
v-<
en
cr-
o>
er-
03, ^
,-,.-,
03
••
••'
íí~J
en
-4-
r-*j
T— .
en
er-
en e
r- oo
en ro
r-
-^
en
en
en
en
C-
-"""•
-~
•"•
\n -
jj r--
eo
tn L
O !T
J m
P T-i
ro co r- co T-(
— í
03 en r^- 03 — -t eo 03 ni
03 03 — :
<T 03 CQ in 03 03 ,— ,
CT' ÍTJ
LO
O
i"J
cr
-LO
<r
-;;
j o
03
G3
O3
CO
r-- c
u -jj
---i
uo <
r cu
*H
03
a3
03
O3
en
,'O
03
-X-
ÜT
-J-
CU -^
cQ
cO
CO
O
3(
-1
—
(
T-l
O
tn
en
<rv£
r -T
O
J ^
03
cO
03
03-H
—
—
-) T-I
UJ
-"
rO
T
-Í
CO
CO
C
3 co
rO c
o oj
r--vD
<•
-0
T-t
C3
c3
eo
CO
— '
*^
— '
'
«Jj
<T
I"O
r~
1
03
cO
33
cO
v3
ü-J
ro
CU
CO
03
03
CO_,
^^ „,
^_,
G3
OJ
-v.
CU•jj lil
'•?
• C
U
CO
03
eo
C3
en
<•
03
ÍO•jii
ü~j
ro O
Jco
03
eo
co
.". .-"i
."*j .".
o *-
i cu
ro•J
j vD
C
J
Uj
4
? — H r- r- en en O 03 OJ
° 03 -~" ro 03 '-'
cO — '
tü •-'
CO 03 '-'
cO .".
<í*
^
r--
-jj
-T
ro
OJ
O
en
r--
,ü <r
fO C
U O
en
r^-
í*^
f--
r*- r
*1-
r^-
«jj
xi;
kij
«jj
<.¡j
-jj o
LO
T-t
vD T
-I ijj
T-(
,••%.
OJ
eo
-T
en
m -
•— >
f^-
«í"
CQ ijj
IO
fO C
U
O
CT-
r*-
...ü
<r
fó
CU
O
en
r~~-
r— (~
~ r~~
- r*~
r*-
«Jj
'Jj
"-JJ "
Jj
>jj 0
<jj
ü"j
CU r
^ O
J r--
ro
co -
T en
\n
—
* h-
ro
en
¿Tco
«JD
ni
ro
OJ
o en
r-v
vr
, ü"3
ro
cu
o
en
r^- ¡
~~-
p*-.
r~~ i
*»-
f**-
v£j
>jj ijj
>jj
>jj
<jj
<sj
tjO
<• e
n <r
en
-T
o "3
T-
I f-~
OJ
03
<•
O
<jj
03
«jj
\¡~J
ro
OJ
— <
en
co
«Jj
ü~J
i'O
OJ -
»-i
en
r — r
^- r^-
r^~
r^~
¡~ *
jj vo
|jj
*jj
ij «x
i «j
j to
T—
1
i
T-l
-, —
1 -r-1
1
-. —
1 .. —
t T
— ¡
1
•, —
1 -. —
t T
— 1
- — '
ÍTJ
O
ü~í
O
-ú
— !
f^-
CU
-3
<r
C-
-Jj
OJ c
Oc3
r-
ÍO <
•- CU
—
j en
co
-Jj
LO
-3-
CU —
i en
^::^ií:
^ 2
2 á
í ¿
í^:2
h- O
J r^
cu
r*-
¡o 0
3 -4
- en
ID
-^
r-
ío
en
co r
- io
<r
cu
— •
en c
u v¿
j t¡~3
<r
cu
•--
( en
;--
'-^
r*-
"•>-
r~
.""-
v£i
-Jj
vD «
Jj
ijj
vD
-JJ
i.O^
•^
H^
^T
-,
_, ,-, -^
,_
,
-,
¡ _i
-, ,H
co r
^- i!i
-í-
co
'-• O
eo
r^-
m
<r
-X1
>-<
O
í~-
p- í
1*- í
- í^~
í"
r**-
««o
«j
j -jj
«jj
~jj
-jj
«jj ,'
O
\fí
O
U~J
O
LO
--'
i-
OJ 0
3
<J~
O
-ü
Oj
en r
- oj
Ȓ~
fO
—"
'w-
- eo
."--
*.;~
j -T
ro
*-<
O¡
>,
r^.
.--.
r-,
,-v.
r--
-.D Jj
-Jj
vTi
<Jj
«Jj ^
T-,—
,^
-1^
-.--.
_,_
^.
H^
_,
,_, ^
_, „,
- .
s -
-jj
w
f- c
u co
<r e
n io - :- ro
en r
-- *
& -d
- :0
T-
t o
co r-
L7
<r
ro ^
o
¡ r
- í-
^-
r~
^ h
~ -jj jj
v^
,jj -
jj ui
-,0
^fO
33
ro
03
ÍO
G
3 -í-
en
iO
—
i f-
-'O
C
n [jl
en r
~ -
jj -c
- fO
— • i
o eo
.-
-Jj
-c-
fO •
--*
o
h-r
^-r^
-í^-
r—
r^-f
-s-'
jjij
jv!j
v
Ov
Dv
ijij
j
O
>""•
O
•**"*
•""'•
~- •
""' '"
O
'""
* •""
'• •"•
•"""-
«•""•
ÍTJ
sD
í-
O3
£T-
O
T-I íjj
fi3
<f
ti"3 -jj
r-
03•jj ijj
r¡
-jj
t.£t
r^-
N r
~- r
- í--
r-
n-
t-^-
r--
-N,
Ae

ADC1080, ADC1280
O ; ; .n < o o oir" o tn -t otO — o> O oí
5' S, n n otD 2. 3 3 1
i- s f 1 í3 * 3 1 I-^ n M "* f)tu | s * H
O — — S m—i < ° Sí E 3 3
?
3
1
S?i
3
~
o01o
o 3
o •í
p o'oro
H
3
^ic333
3Oa
o" ^ 3 'Z 3
3 1
s §•5 n
1 1
1 ^
1 1
ia
- o o t =
" - S » 1L L i r- íj _* o W <0 -• 0 OT =•
: í
^ s +c d. i;
n £_ í?
5- " 5"
1 _
^ I° ys »g ss1 b.< o r1 §1 ro
CD tn
3 S
II H ^ f^ío o ^
ggg
111
1 5 s N,^11
ff Oí
o
f—
53
a
<
«
P oo" •3
5"3
O
0 °14 oO tD
on gq t»
# >O_ 3
i 5"3J 5"v "o3 E
?IJ^«
Ifs
1+<
O CDc 3"
"3Z
•nUT
VO
LT
AG
EfU
2
O)
I
INP
UT
VO
LTA
G
m
soa aa SVOINOM, s
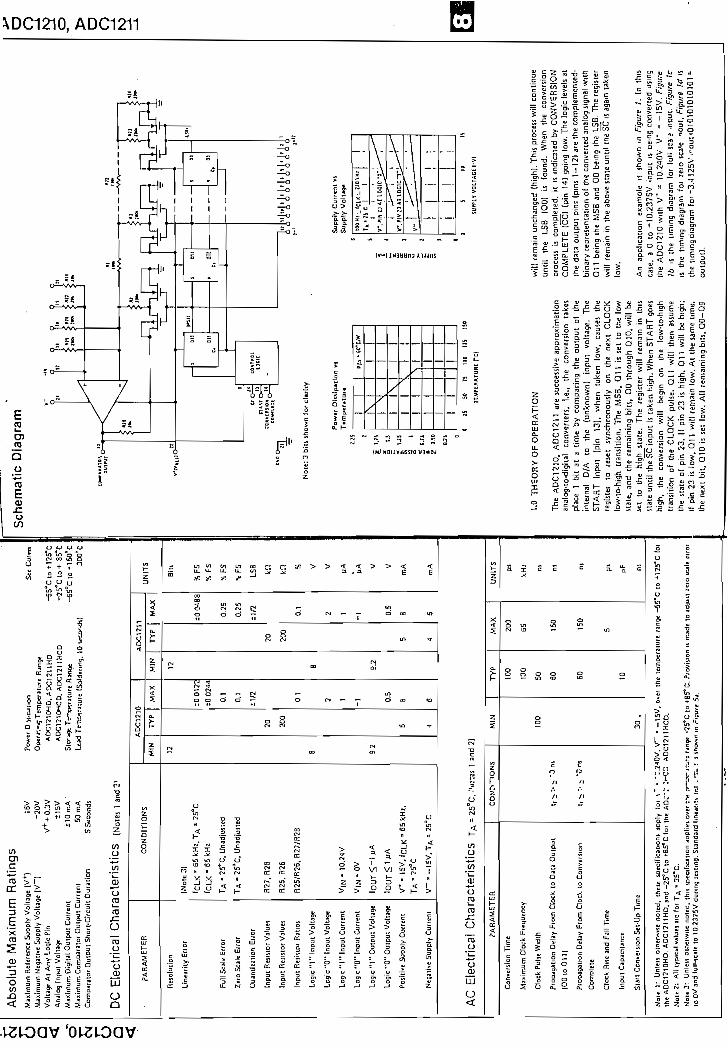
ADC1210, ADC1211
roí
O)
oID
Non
1:
Unle
» om
erwise n
ottcí, th
eie
lo
eciíic
aiio
ni apply
IOT \ " '"JZ
-íOV
. V~
• — I5
V, ow
er ihe
tempera lu
í e tange -5
5* C
to -M
25°C fo
ílhe A
OC
1210HD
. AO
C1211H
D, a
nd -2
5°C
to +B
5S C
foí tne A
DC
'T :>~C
^ A
DC
1211HC
D.
No
tt 2. A
ll typic
il valúes are
fot T
A • 2
5*C
.
Ñau
3:
Unle
» Q
lnerwne n
ole
d. th
ls spe
cificatio
n applie
i over :it c— sr-a
r-i?: (»ngí -2
5*C
to -+B
5*C. P
rovisión 11 made lo
ad
juit u
to ica
lt etrorto
OV
and
full-su
te to 1Q
.2375V dunng
tem
ng. S
tandard lineat.Tv in: . ~r_ :
i in
ow
n m
Figure S
í.
ítate
untiJ
tne S
C in
puc fs
tafe
en h
igh. W
ílen
S
hig
h,
the
co
nve
rsió
n
will
begin
on
ihe
tran
sitio
n
of
the
CL
OC
K
puls
e.
Qll
will
t
the
sta
te oí
pin
23.
If pin
23
is h
igh. Q
l 1
v.
if p
in 2
3 is
low
, Qll w
ill fem
ain
low
. A
t the
lhe
ne
xt
bit, Q
IO is
sel lo
w.
All re
ma
min
g b
TA
HT
goei
case
, a 0
lo
-10.2
375V
in
pui i$
sem
a c
pnverte
d u
smg
ow
-to-h
igh
!he
AD
C1
21
0 w
iih V
* * 10.2
40V
V
- -1
5V
. F
igu
re
len
a
ssum
e Ib
is
ihe tim
ing
dia
ora
m fo
r fu
ll 5:3
'.; -nput. F
igu
re
Je
ill be h
igh;
is lh
e tim
ing
dia
gra
m io
r ze
io sca'e
iput. F
igu
re
Id 1
5
sam
e time
, th
e tim
ing
dia
gra
m fo
' -3.4
12
5V
tiou
tiQlQ
101010101 -
is. Q
O-Q
9
ou
tpu
t).
Conversión
Tim
e
Mai-im
um
Clo
ck Frequency
Clocfc P
ulse Wid
ih
Propagatm
n Oelay F
rom
Clock to
Data O
uip
ui
(QO
lo Q
1 1 1
Propagation D
elsy Fcom
Clock lo C
on
veisio
n
Com
plete
Clock R
ué and Fa
lITim
e
Input C
apaciUnce
Sta
ri Co
nve
rno
n Set-U
p Tim
e
i/ i/
i/ i/CJ Ó3 3
Ul —0 0. o
0 0 0 O W Qo o
*" s s s s
ir3 ^ , - C 3 S ^ S - H
S S F 5 Í 3 5 * ' 2 . 3 - I r" - ÍS . ^ S ^ w 3 " o
3 ' o ™ 3 J 3 ™ á > ~*
f^íSÍrÜÍS 33-3- ~° ^ £' w ^— . ; ; " 2 c : j > i i i — . — . ^
J - > S ™ « a, — - o- i = - " ^ D = n> -nss¡. o - í ^ ^ - g g ^ o
"H|'HÍ-5" o-¡ 5 5Í T S - i ^ S Í S - 53-° S S If ¡1.3 5•S.oSí-3 11 h g 2- 0 • „ D 2. " n2 — O° S.^ ^ ^.n^ J . ^ - ' ^ T T IQ:TIOí 3 " 3 5' „ m S.= = c - 3 - ^ ^ n g7 ^ : r e o £ f T i g ™T f - . S ^ Í ' C C * " 0
3 2 " S 0 - 5 - 0^ -° - o 1 s " H-5' í. sf (~ S * S.^3
Í"s"fSI'i3fl'°'
> o" í D g; 3. o-g = í3 5 = í - ' 3 r l > O o 2 = :
• - , - S j Q . S g = "tj m C T ^ a i T í í ; ; re
"o. 3 5 ' S S C " ' 3 ' 9S 1'* ^ ° H s' n |-
5 3- f S S ™ § G §cha
ng
ed Ih
ighl. T
his
pro
cess w
ill contin
ué
B
(00
) is
found.
When
the
co
nve
rsión
iple
ted
. it
is mdic
aie
d b
y C
ON
VE
RS
IÓN
CC
1 (p
in 1
4) g
oin
g lo
vv. The lo
gic
levé
is a
t
t pin
s (p
ms
1-1
2) a
te the c
om
ple
me
nte
d-
itatio
n o
í the
co
nve
rtetí a
na
log
sign
al w
ith
MS
B
and Q
O b
em
g th
e
1_SB
. The
reg
ister
the
a
bo
ve siate
until trie
SC
is again
take
n
i e
xa
mo
le
is sh
ow
n m
Fig
ure
!.
In th
is
PA
RA
ME
TE
R
ooz'J
1ozm
Z2
H-<TJ
£>X
c2
01A
C E
léctrica! Characteristics T
A = 25ac. ;<>.::;>s i and 21
„'•s. S33
1
S
s
«;
¿
Z T f r - r - r - r - r - r - r r i r ^ - O ' ^ ' n r- 3J£ 2 1 2 1 a , a , 2 , 2 i § ' S ' o ^ c t : — 5' 2£ =. ñ' ñ ñ fi ñ' ñ - « - a tp i —í Í t : ; : ! i 3 ) 3 i 3 í ; - X 1 3 ;v -
c / ) c í ~ i c l ~ : c í ~ i ' i i ' i ' í t " — s~ •< 5% í o o s r ^ í ^ S ' S s f m í t i S 1 3
13 S H S - o ü - D - a H S S ^ S ox ^ - g E £ S S 5 ; o < < ? 5 *
S ~ < < ? £ ) ° s : 5 f | °
- H f !" 2 2 1 "S
«í í< < 0 0 < < 3 3 3 í1 £< n n 2„' , ,, C C Z -Z £ M Í3 „ ,, £ ^ £
1 S s ÍA ¡A v - 3 3 3 a K • • aS o .< - .1 < g í" m o> 0° n* 3 s• r^T 5. -c ^ ^ " _ _ : * • * •-t P * > < y £ £ £ ?u ^ ^ a a "_¡M C, W S' £" >Ul m — n „
n 5 a a KD
" n
S S
•*» In u M
8 °
oí m o — — to o — n o o ooí — ¡3 '— — D o
!• W
10 m -KJ ^
01 g S
0 , 0 , 0 - - K J p ^ K K ?
m
,_ s» # # & a
3 3 "K ' ~K ¡S *£ "> TI TI TI TI -'> > < < J - > < < i ^ J ^ ' i n t n W ü ) W K
PA
RA
ME
TE
RC
ON
DIT
Ozto
Sí
3 §TJ M
IJ>X
•c2
3 §"» M
í
£
c2
H
2 ^- y
LJ ° T.rO*EH OISSIf*7IOí( [W| 0 - 9 0a " - — ^ ~ ll-I 3
S K - f c u K ^ K - 1
í? í .S3 í 3 ?í
' J O "* " £ ! „
¿C c B «• o o o/ s? & ?=?=?=.^/^ s • „ 1
S -1 »- «
* 3 =
1 rI
_ ^ _. '
SUPFlYCUHRENIl".*! jjj 2
Í.1 r- í*3 S? -^
- z — - z ~ S - ^j- O -
= . ^ "^r <n o^ , , , , L-s \ - -S4- í a s o^ i i i i\ s \ •; « a o^ i i i
" V A " °^- r? i
VW
?£
/
E?l-A^A—rH ^
i— *A^—
Fl?=S?L*— V , — '
ir ?£u, 1
n_n^_
Absoluta M
áximum
Ratings
Má
ximu
m fleferenc?
Supply V
olt3
ge
IV"1")
I6V
Po
wtr D
«.OJIK
XI
See C
urva
Má
ximu
m N
egative Supply V
olla
ge (V
~)
-20
V
Ow
r»t<
^T
e^«
ratu
(i Ringe
Volla
ge A
i Any to
qic
Pin
V
+ 4 0
.3V
A
OC
HIO
HO
. AD
CU
11H
O
-55*C
lo -H
25*C
Analog
Input V
olta
y ±
15
V
AD
C121D
HC
D. A
DC
171 1H
CD
-2
5aC
lo -t- 8
5*0
MaK
imum
Dig
ital O
utp
ui C
urfEnt
±1
0 m
A '
Sio
-ig; T
t-^>rrjtu
rt R
arvge -5
5°C
to •M
50°C
Má
ximu
m C
omparator O
uip
ut C
urre
ni
50
mA
U
adT
mD
-ra;u
(e (S
old
erin
q, 1
0 i
c-v
lil 300*C
Com
parator Ou
tpu
t Sh
oct-C
írcuit D
uta
tion
5 S
eco
ndi
DC
Eléctrica! C
haracteristics (Notes i and ?>
100orrO)
31 S.
1: ó"H o
_J» 5'H -Tv-o^ ¡' \it Vv^ Q
15 =^/vv^rO5 =
?5 =
|i
•í "
i
'*'
<r
«^
»•
i1-
*-
UZU3QV '01210QV

<N 5 Q S
JWO
— i
c,
V
ÍC £t Q11
QH
C
I 0 "O
UI\
r
,'?", \
«
i.jjH
v^-^
^^-7
^
i ai
ai
oí n
s oí
aj w
oí
ao /
RII>
SJ¡
FIG
UR
E 1
i. A
DC
1210
Con
o^t.d
for
OV
to -
10.2
375V
(N
aur.l
Bin
.ry
Out
put)
FIG
UR
E Ih.
Tim
ins D
i»5ra
m i
ot
V,N
• F
ull S
cíle t
op
ut
8-1
10
O I
1 )
< i
I I
I J
10
U
I)
I]
14
FIG
UR
E Id
.TJm
mg D
iigritn
fo
i V
)N •
-3
.41
2S
V 1010101010101)
8-1
11

ADC1210, ADC1211
E g8 | =
s|f ¡'° o Ñ S :
:in=" .21 -S i
¡i J: 1 3 '
¿ H o íA ss " 7AAÍÍ > a
.' c o
1 -a I |'! °. t o .
•p u 3•£ c _cc S E .
S -£ > co.a- 2-:i S _ .c
3 S
OJ Í ™ (N
I"1 ™ 2
« *t ^r
E -S < o* 3
-i 5 *; — o u
i u "
tn ~ _ £: E
1
c
c
•0C
3cE
1c
03<tt-
FU
NC
T10
N
1M
NE
MO
NIC
PIN
NU
MB
ER
S ™ 5 "S^ É Q - ^ ' ^ ' ^ ' ^ J . Q . S ; ^ S& - o a o a . . S ( u E c : S c c™ U n ) U a j C = 1 3 ~ ^ : 3 ™. c . c S T J S ' 3 . S 5 - - c : ; 2 -S^ . O ' - ^ E C ^ ^ - ™ 0 1
s s S ^ S 1 S 8 £ „ S -3 2c > u « w g e •« c c . S >- S£ c a . 5 ~ c 5 3 — o u « SE o •" + Í5 c -2 o «t -s : F --a j U •" > S -2 2 'c -^ ™ •£ c"
"5- V ~ "o * £ 2-5 > 0 = 8 s £c c •*- c -^ !: « e r- •- c. " ™ • —¡ S . Q " ^ = &H ~ ¿ ^ ^ s g -S £ + ••= T) S n ™ > u o ^ u P Í S .& ~~ TI-9 '— •- o .ü * a i - 3 a i S ( ? ) 5 O " c c(S ™ " • f í . 'D j^ X : ™ .S ^ — . CL • oí O™
•" n í v - £ c "S «u ? .E -f- 6 o ° 's -a— .a § £ ^ - 5 O Q . - o g ^ í á i S ~ l c
^1 1 1 1 1 £ "s ! ' § • = « £ a e- g |S- c £ s £ a s S ' i . S Í S § o £ «™ < t - t - 2 r " " ™ — C " O r - Q . M í ^ i i j o -D Q- S
~ S > s - o , . ? l °l s < Í ° •£ i? 1 ™-g | g I 5 '¿ .E " - H j j ^ s ! | ^ s -s aS •= -o u c a- s S . S . S . ñ S S - c ™ ? c Su
¡ 1 ¡ 1 i B í "H j ! * H í £ - 1 i s f2 | Í S l l | . g í s S - | g S 5 l g ^ ^ ^ S
¡S= S & J ? > > S 3 ¡ ¡1 3 1 ! 2 ó | § | §« > > U m . a 8 " c ' E ^ ' S a ' D ' 5 . c : G o M e 3 m g "' ! 8 7 Í o : | : : < u - ¿ T í ~ ™ = . n s ™ ' S ! - S S. g1 « E - f i e" - . . t í — . E - . O l c o C p - o S o r C - D r a 2 . Í Í § . t ío
||5- ilglíifiiSií 1!f¡-¿11UMl^Ssljürií |!ll?l§S 5 3 3 ! S 1 . 2 Í 1 3 i c < u 1 S t : - a : E £ a ^ 5 o £ c - £^ E g g - S ^ S ^ H ™ S " i " ° S ^ ¿ S H ^ - S 2 " í~ s = u.¡ ¡ -• ü « ^ c j . s - g * g o -s | | s a ^ f« a s l g S S ' S ' ñ S ^ g g K f g •= s1 ° s ¡ ° 2Q £ ^ . J i . E i S ; _ j í i : , £ S 2 i s a : ^ s ; £ 2 : o o > c j u - £
_ 03 ID U-g (NI CM UJO ce o: re
J. iC z in Q >— l u i U rs £ : Í N 1 2 + O i x0 Iw |u o: + o: > 0 > u "
es ^ 2
I n « L j - in ^ . 0 3 o •— IN n -T^- ~ ^ .— — ~ r - J ( N I Í N { N C N 2.
0 A
PP
LIC
AT
ION
S
"sav
ed"
if 10
-bÍt
conv
eisi
on
accu
racy
is
ta
king
pla
ce.
The
02 o
utp
mjh
ould
be "
OR
'd"
with
C
ON
VE
RS
IÓN
2.1
Pow
er S
uppl
y C
onsí
deta
tions
and
CO
MP
LET
E
(CC
I in
or
der
to e
nsur
e th
at
the
regi
ster
Dec
oupl
ing
does
not
loc
k-up
upo
n po
wer
tu
rn-o
n.
Pin
22
is b
oth
the
pos
itive
sup
ply
and
volta
ge r
efer
ence
- s g S ^ s s a 2í R o " , .2 5
> * — T -J ¡- 0,
2-= S o f i ' o t ^ í cA-MS E •= " -o - .- >- -- =I I "~ = a i c C 3 r o C EVJí 2I - é " o S F 3 | gsY a -5 s s s g ^ y - s -i
— " s?~° < J = .y 7» *- -o *s 3 «
- ° — n fe BiH «i S £ c "o 'E -^ —= = " - „ - - *• ' " - ^ - ^ r — S-5 S S.
^s S ST^ H i.E = -•= g.-= g S .2 oO- - a £ O S UK > - ( Ñ * Q - * ' I ~ ™<>=• * s - - o " r g £ r t ^ - S ^ - ' i " S "S
K - o . 2 ™ U ^ ° I— * "" " - n°T: S~~° M e £ Q '« '= ts, >• ~ *•= c
S '3-°J ¿| | *SI-S,§s.s o ¡í0^ s^^^ ^^ § S - g ^ i ^ - a g, ||
E 2 ,y u o ' ^ o o & g £ - ^" o" S . ^ í ; . ^ " " ^ - ^ o. — —
-1 < o -6 . -=5o E ' ° ° s i**i ^ S o J ^ O ^ " ^ ^ > ocS h - O « — < Q _ S ; i ^ es t^ííi
5 2 S " a ^ T ) ' Q ^ c £ ™ - c c o a i ^ " " S
llPllif giif! iii tfs.a j ° . S o l c 8 — c g ™ S t t •- 2 E Í É3 - £ H t . * ' " í ^ T 3 Q J " O Ü 0 1 ™ - £ " g t 3 a . " - '
I^ÍSl-l-ül tíl^I -T-^- 5£lE^H^Iñ- l t > S J S g g ¡ - g g |g|« o ^ X - a ^ c . E S1 ™ V- -21 o r = B c '= " E5 -S 4, > g a a - = e S ^ ^ S ^ ^ a S g>~-£. í c í í S ' S ^ S ^ o ai a „ -= ™ S e - £ c o- j= ¡ - S e " u « w - o- 2 íH-o,™ g H O ÚÑ : ¿ o ^ S - S 1 = - ~ S " ¿ 3 V ° § ^ < N3 ^ 5 ^ > Í 5 ' ° 3 - 2 a X o -5 u.' S u 5 = -° S u .3 o w S = r ; | " 2 -^f|¿n. ° 2 - g « > ^ g : -
^¡iil II B j iSs i fsr» t §:eÍI?i.2lSsS i iíí! ÍPI i? § i<í « - o S s ;^S ^i-S - 3I -g" Sí -S a o*'|u — E o j ^ - a O ^ E o - m S o - í á ™ S1 ™ ™ u"u_ ( ^ 2 ™^ ^ O D i E u c — f^n i 3 a •- P >• 0. _ , ~ Q - 0 IJ— T- ^ 21
M * S E ^ 1 * S riljls Ii*S |¡ Sil' - E S i ^ S l a e S ^ u . > S » 5 3 u. ^ S ^ a . ^p < ^ J
^ S - s ^ S s i - S 1 1 ^ ^ E S « ¿ " §=- "52 „' „ c 5¡ í S S S S ^ ' i d ííüllSÍ J s S l 3 ( 5 2 |
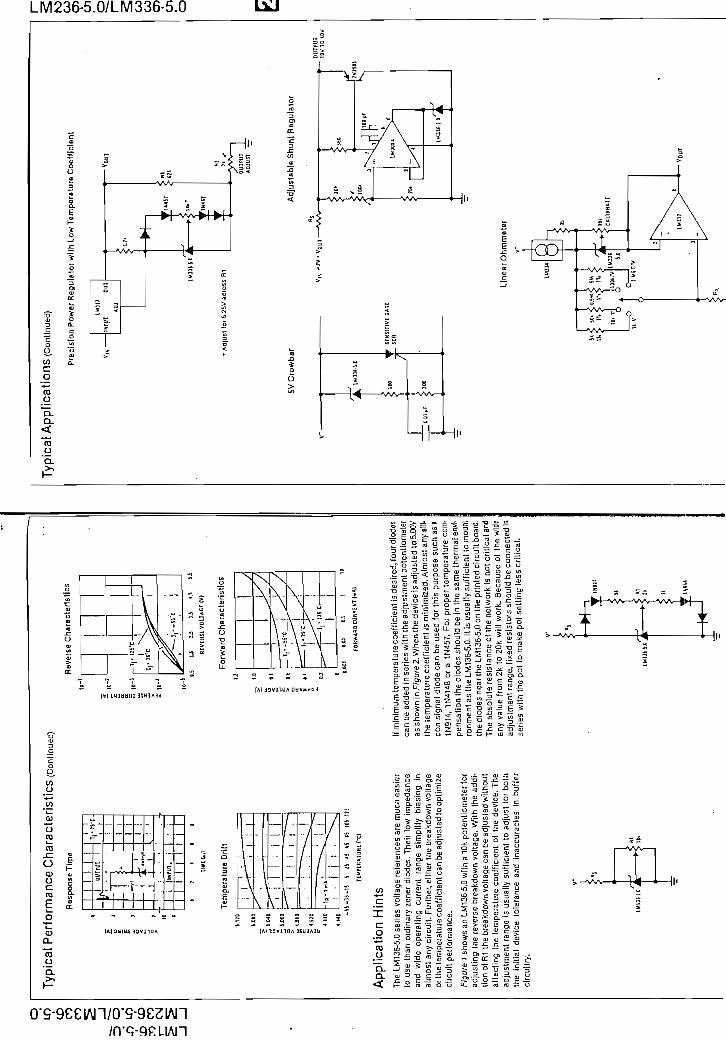
Typ
ical
Pe
rfo
rma
nce
Cha
ract
eris
tics
Res
pons
e T
ime
-bb
-3b
-IS
5
Ji
tí
i$
IS
tÜ5 U
S
TE
MfE
BH
UR
EC
U
Ap
plic
atio
n H
ints
The
LM
136-
5.0
setie
s vo
ltag
e re
fete
nce
s ar
e m
uch
eas
ier
to u
se t
ha
n or
dína
ry z
ener
dio
des.
The
ir lo
w i
mpe
danc
ean
d w
ide
op
erat
ing
curr
enl
rang
e si
mpl
ify
bia
sing
In
alm
osi
any
cir
cuí!
. F
urth
er, e
lther
the
bre
akd
ow
n vo
ltage
or th
e te
mp
era
ture
coe
f íic
iení c
an b
e a
dju
síe
d lo
op
timiz
eci
rcu
í! p
erfo
rman
ce.
Fig
ure
I sh
ow
s an
LM
13S
-5.0
wlth
a 1
0k
pote
nüc-
mel
er í
ora
dju
stin
g th
e re
vers
e br
eakd
own
volta
ge
. With
Ihe
add
i-tio
n o
í R
l tr
ie b
reak
dow
n vo
ttag
e ca
n be
adj
usle
d w
iího
uí
aff
ect
ing
Ihe
te
mp
era
ture
co
eff
icie
nt
of t
he d
evic
e. T
head
just
men
t ra
nge
is u
sual
ly s
utí
icie
nt
to a
dju
sl l
or b
oth
the
¡nlíl
al
devi
ce t
oler
ance
an
d in
accu
raci
es
in b
ufí
er
circ
utt
ry.
Rev
erse
Ch
ara
cte
rist
ics
10-*
RE
VE
RS
E V
QLT
AG
E (V
I
Fo
rwa
rd C
ha
ract
erl
stic
s
FO
RW
AH
DC
UR
RE
Mlm
A)
lí m
inim
um
tem
pera
ture
coe
f lic
ienl i
s de
sire
d, [
ourd
ioda
sca
n b
e a
dded
in s
erie
s w
iih th
e a
dju
stm
en
t po
tent
iom
elef
as s
ho
wn
in F
igur
e 2.
Whe
n th
e de
vice
is a
dju
sle
d lo
S.O
OV
the
tem
pe
ratu
ra c
oe
lfici
en
t is
min
imiz
ed. A
lmo
si a
ny s
i)!-
con s
ign
al d
iode
ca
n b
e u
ssd
for
this
pu
rpo
se s
uch
as l
1N91
4, 1
N41
48 o
r a
1N45
7. F
oi
pro
pe
r te
mp
era
ture
con
vpensa
lion
the
dio
des
should
be
in t
he s
am
e th
erm
ai e
m\-
ronm
enl a
s th
e L
M13
6-5.
0. II
is u
sua
lly s
uff
icie
nl í
o m
ounl
the
díod
es n
ear í
he L
M13
6-5,
0 on
the
prt
nte
d ci
rcu
í! b
oarc
tT
he a
bso
lute
le
sist
an
ce o
f íh
e n
etw
ork
is n
ot c
ritl
cal a
nüan
y va
lué
fro
m 2
k to
20k
will
wo
rk.
Be
cau
se o
í th
e w
ide
ad
just
me
n!
rang
e, (
¡xed
re
sist
ors
should
be
conn
ecte
d ir.
seri
es w
ith
th
e p
ot
to m
ake
pol s
eít
ing
less
cri
tica
l.
-w-
nni i
dius
tmen
t
Typ
ical
Ap
plic
atio
ns
(Con
tinué
^
Pre
cisi
ón
Po
we
r R
eg
ula
lor
wM
h L
ow
Te
mp
era
lure
Co
eff
icle
nt
VJK-
tMIN
fUI
A
17DU
IJ
< • rIM
JJB
5Í Á
1 !o
r6.2
5Vac
foss
Rl
M.It
t-I
Fl
]
-/
<E
^
* 1
ftM
it
<—
<
'MU
'
r\msi
r
> ni
> tí
5
O)
enen
á|
b co O) en b
SV
Cro
wb
ar
Adj
usta
ble
Shu
nt R
eg
ula
tor
Tr
LIn
ea
rOh
mm
ete
r
LF155/LF156/LF157 Series
oo13DCUO
oBLOou13(T>O
w
OQ.
Abs
olut
e M
áxim
um
Rat
ings
Sup
ply
Vo
ltag
e ±
1BV
Pow
er D
issl
pa
tlon (N
ote
1)
" -
500
mW
Opefa
tlng
Te
mp
era
tura
Ran
ge
' O
'C to
-f 7
0 'C
Tj(M
AX
) 115'C
Dllí
ere
nU
alIn
pu
t V
olta
ge
±3
0V
Inpul V
olta
ge
Ran
ge (
Not
e 2)
±
15V
Out
put
Sho
rt C
ircu
it D
ura
tion
Contln
uous
Slo
rage
Tem
pera
tura
Ran
ge
-65
'Cto
+I5
0*C
Le
ad
Te
mp
era
ture
(So
lde
f!n
g,1
0sB
con
ds)
30
0 *C
DC
Elé
ctric
a!
Ch
ara
cte
rist
ics
(Not
es)
SY
MB
OL
vos
'os
IB SIN
AVOL
v0 VCM
CM
RR
PS
RR
'S
PA
RA
ME
TE
R
Input
Ofí
set
Vol
lage
Ave
rage
TC
oí
Inpu
t O
físe
tV
olta
ge
Input
Oíl
set
Cur
rent
Input
Bia
s C
urr
en
t
Input
Re
sist
an
ce
Larg
e S
lgnal
Vo
ltag
e G
aln
Out
put
Vol
tage
Sw
ing
Inpu
t C
omm
on-M
ode
Vo
ltag
eR
ange
Com
moiv
Mode
Re
ject
lon
Rallo
Sup
ply
Vol
tage
Re
ject
ion
Rallo
Sup
ply
Cur
rent
CO
ND
ITIO
NS
Ove
f T
empe
ratu
ra
Rs=
10
kQ
T¡ =
25
'C,
(Not
es 3
, 4)
Tj C
70
*C
T¡ =
25*
C,
(No
tes
3. 4
)¡
70 *
C
T¡ =
25 'C
VS =
±1
5V
,TA =
25
'CV
0=
±1
0V
. R
L =
2kQ
Ove
f T
empe
ratu
re
Vs=
±15
V,
RL=
10
kQ
RS<
10k
Q
{Not
e 5)
LF35
1
MIN 25 15 ±12
±11 70 70
TY
P 5 10 25 50
1012 100
±13
.5+
15
-12
100
100
1.8
MA
X
10 13 100 4 200
3.4
AC
E
léct
rica!
Ch
ara
cte
rist
ics
(Not
e 3)
SYM
BOL
SR GB
W
PA
RA
ME
TE
R
Sle
w R
ate
Ga
in B
andw
lOÍti
Pro
duct
Equlv
ale
nl' Ifip
ul
Noi
se V
olta
ge
Equiv
ale
n!
Inpu
t N
oise
Cur
tent
CO
ND
IT10
NS
VS=
-1
5V
,TA =
25
'C
VS=
-:1
5V
.TA =
25
-C
TA =
25
'C,
RS=
10
ÜQ
,I =
100
0HZ
LF35
1
MIN
TY
P
13 4 16
0.01
MA
X
UN
1TS
mV
mV
PA
nA PA
nA Q
V/m
V
V/m
V
V V V dB dB mA UN
ITS
MH
z
nW
-/H
z
Nol
e 1:
Foi
ope
tatin
g al
ele
vate
d le
mpe
ralu
re. I
he d
evic
e m
usí b
eQer
aled
bas
edon
a th
erm
al :e
sisl
ance
oí 1
50'C
/Wiu
nctio
n to
ambi
ent
or 4
5'C
JW ju
nclio
n to
cas
e.N
ota
2: U
nles
s ol
herw
ise
spec
lfied
the
abs
olut
e m
áxim
um n
egal
ive
inpu
l vol
lage
is e
qual
lo In
e ne
galiv
e po
wer
sup
ply
volla
ge.
Nol
e 3:
The
se s
peci
ficat
ions
'app
ly l
or V
$=
±15
V a
nd O
'C C
TA
í +
70
'C. V
os-
IB a
nd
'os
ate
mea
suie
d al
VC
M =
°-N
ole
*: T
he m
put
bias
cur
ienl
s ar
e ju
nclio
n le
aKag
e cu
rren
ls w
hict
i app
roxi
mal
ely
doub
le lo
e ev
ery
10"C
incr
ease
m Ih
e ju
nclio
n te
m-
pera
luie
, Tj.
Due
lo I
he li
mile
d p
rodu
cllo
n te
st l
ime.
Ihe
inpu
l bia
s cu
fienl
s m
easu
red
afe
corr
elal
ed t
o ju
nclio
n le
moe
ratu
re. I
n no
rmal
oper
alio
n [fi
e ju
nclio
n te
mpe
ratu
re f
ises
abo
ve Ih
e am
bien
l lem
pera
lute
as
a íe
sull
oí I
nler
nai
pow
er a
issi
oatio
n. P
Q. T
j = T
A •+
9jA
PD
wtie
re 6
^ is
Ihe
Iher
mal
tesi
stan
ce fr
om ju
ncl
ion
lo a
mbi
enl.
Use
ot a
hea
l sm
k is
leco
mm
enO
etí il i
noul b
ias
curie
n! i
s lo
be
kep
l lo
»m
ínim
um.
Nol
e 5.
: S
uppl
y vo
llage
rej
eciio
n ra
llo I
s m
easu
ied
lor
botri
sup
ply
mag
nitu
des
Inct
easi
ng o
t ae
cíea
smg
sim
ulla
neou
siy
m a
ccor
oanc
íw
ilh
com
mon
pta
clic
e.
3-36
Typ
ical
Per
form
ance
Ch
ara
cte
rist
ics
Input
BÍSJ
Cur
rent
In
put
Blas
Cur
rent
¡ '
' j l_
l LJ_I
" L
' [
! '
' '
!
<
JI
ÍIA
J C
UR
RE
NT
£
S
S
i ID
-V
j.sliV
-TA
-H-C
—
//
^
, 1
1 ,
1 1
1 1
1
-11
-S
0
5
CO
MU
Qft
.MD
DE
Va
iTA
[jE
(V|
Pos
itive
Com
mon
-Mod
e In
pV
olla
ge L
tmit
10
*
u
35
§=
1D
2 « |I
s 0
H IM
Hi)
K
fCA
IlV
E O
UT
PU
T V
OL
TA
CE
SW
ING
(V
C.
l <
s
~
UM
TY
GA
IN B
AN
imiD
T
O-C
SlA
S*»
/
Y
C
/f
/ \
/
S ID
IS
Jega
tive
Cu
rre
nt Lím
it
|
\
:
:1
Id
70
M
*
DU
IMS
INK
CU
Rfl
EN
Ttm
M
Gai
n B
andw
idth
i i
^^
|
; t
1 11
1V
S'il
SR
L-I»
Ct
• 10
5tf
~1
i i
i i i
t ! X
¡
!
i i
' !
>->
^i
í i
1 !
!l
i
•* C 3 m
*
0 ut
10
S>
IS
NE
CA
TIV
tCQ
MM
DN
Ua
pl
VO
LT
AC
E L
IMIT
31
ID U 1
0
M »
~10
-10
_vc*-
»
__-V
j-iü
V—
1 — i i— i—
-/
\ \Á AE
jPf ''
i i
i ii 1
11
10
»
41
40
U
Ti
TE
UP
ER
AIU
Rlf
O
Jega
tive
Com
mon
-Mod
e In
Vol
tage
Lím
ít
» C
£tA
Í.-í
1 C
(
i 1 11
A1
S\
!/
AA
_M S
IÉ
IS
í
Vol
tage
Sw
ing
iH
L-»
-TA
-IS
•A
| 1 / ' 1 1 1
--,+
- ^
/\_
S 10
IS
í
sum
.r VO
LTAG
E U vi
Bod
e P
lot
\ ~í l-Lli lii1 F
1ÍIK
--1!
MTlfl"1
'11
Pi-v
JMlI
ct-i
oopM
'
\ A
. ! :
:' •
•I!ü» ¡
!\• ü
üí
: \
Sup
ply
Cur
rent
" \
1
1 i
1
i
*
l.in: 3 >
M
"
!.*
U
1 pul
5
'
HGtV
pp)
rosi
Tiv
í, "
<
IS
=•
ID
5
S 0
0 D
1M
IS
too
M
» i I
o S ;
u
-M S
»
"
" 1
Z.1
00
-IÍD
U
»
JO
30
«D
5
0
60
JO
"-
1
l
»
1M
TCM
reRA
TUHU
a
mom
wm
a
^
s~
^
S U
IS
ID
¡b
SU
rrL
YV
OlT
AG
Eli
V)
Pos
itive
Cur
rent
Lim
it
— L
' '
=^L
>1
JB'Cm
r 1
i
10 n
»
toO
UT
fUT
SO
UR
CE
CU
BR
EN
: (m
A)
Outp
ut
Vol
tage
Sw
ing
Vi-
-TA
- ^/
?*-
-
•Í5
V
I
II
Ih
T
M/l H /i IIllk"
K 1 II IIt
iR
L-ou
TruT
iOA
nt*n
Sle
w R
ate
BL
-IAV
- |
t —
— li
FA
1 !
i -
!
! ¡ i
u
LllN
C
SIN
C-
1 '
1
TE
MP
tHA
IUR
El
Cl
3-37
00 en

IO co U.
Typ
ical
Per
form
ance
Cha
ract
eris
tics
(contf
nued
)
Díit
ort
ion
vi
Freq
uenc
y
II
IM
11
tf
t
(RtO
UE
NC
YIH
l)
Com
mon
-Mod
e R
ejec
tíon
Rat
io
10
1U
11
1U
19*
1U
10M
IRE
DU
EN
CY
IHil
Ope
n Lo
op V
olta
ge G
ain
IV/V
)
t 10
is
¡etU
Pfl
YV
OU
»C
ll-V
I
Undiitorted
Outp
ut
Vol
tage
Sw
ing
vs • iiw
:<is
DIS
T
IMt
FR
EQ
UíK
CY
lHO
Pow
er S
uppl
y R
eje
ctlo
nR
atio
•ili
V•I
S'C
SJ
1K
1SI
IMi
FR
£QU
£NC
Y(H
i)
Out
put
Impe
danc
e
|VS
-MS
VÍ
loo
n lo
t iM
t IM
lo
w
Ope
n L
oo
p F
requ
ency
Rei
pon«
i ID
na
n
m I
ÍRE
OU
EN
CY
lKil
? *
Equiv
ale
n! In
put
Noi
seV
olta
ge
ES
•TÍ'-
Ü it.
iii't
>miF
TT"m
ii tit
iü -
iüjo
:
Inve
riei
Sen
lin
gT
íme
SE
nil
NC
IIM
EI.
il
Puls
e
Res
pons
e
Sm
all S
igna
l Inve
rtin
gS
mal
l S
igna
l N
on
-lnve
nin
g
TI
CO Oí
TIM
E (0
.2 t,
s/01
Vl
Larg
e S
ígna
l In
vert
ing
TIM
E (0
.2^i
/DlV
)
Larg
e S
igna
l N
on
-ln
vert
ing
TIM
E(Z
vs/O
IVt
Cur
rent
Lim
ít (R
L=
100
Í1)
TIM
EIS
yi/D
W)
Ap
plic
atio
n H
ínts
The
L
P3
51
is
an o
p am
p w
ith
an
inte
rna
lly
trim
me
din
pu
toff
setv
Dlt
ag
e an
d JF
HT
inp
utd
evi
ces
(BU
FE
T II™
).Th
ese
JFE
Ts
haue
larg
e re
vers
e hr
eakd
own
volta
ges
fro
mga
ie t
o so
urce
and
dra
m e
limin
atin
g ih
e n
eed
for
clam
psac
ross
th
e in
puts
. T
here
fore
. la
tge
diff
ere
niia
l m
put
volta
ges
can
easi
ly
be a
ccom
mod
aíed
wnhoui
a la
rge
incí
ease
in
in
pu
t cu
rre
nt,
T
he
má
xim
um
d
iffe
ien
ua
tin
pu!
voha
ge
is
inde
oend
ent
of
the
suop
ly
volta
ges.
How
ever
, ne
ither
of
th
e in
put
volta
gel
shou
ld
be
allo
wed
to
exce
ed t
he n
egat
ive
suop
ly a
s th
is w
íll c
ause
larg
e cu
rren
ts t
o ílo
w w
hic
h c
an r
esul
t in
a
desu
oyed
unit.
Exc
eetíi
ng
the
nega
tive
com
mon
-mod
e lim
it on
eith
erin
pui
wíll
cau
se
a re
vers
al o
í th
e cr
iase
lo
th
e outp
ul
and
forc
é ih
e
ampl
iííer
outp
ut
to
Ihe
co
rres
pond
ing
hig
h o
r lo
w s
taie
. E
xcee
ding
the
neg
ativ
e co
mm
on-m
ode
litnit
on b
oih
inp
uts
will
for
cé i
he a
mpl
ifier
out
put
lo a

Application
H
íntS
(C
on
tín
ue
d)
hig
h tu
te.
In
neíther
case
do
es
a
late
n occ
ur
sinc
e
raiii
ng
tfx
Jnput
back
w
ithin
íh
e com
mon-m
ode
ran
ge
agai
n puti t
he input
stag
e and i
hus ih
e
am
plif
ier
in a
norm
a*
oper
a ting
mcx
ie.
Exc
etd
ing
ihe
posi
tive
com
mon-m
ode H
mít o
n a
sin
gle
input
will
nol
cha
ng
e t
he
pha
se of
the o
mp
ut;
ho
we
ve
r,
If b
oth
inputi
exc
p^d
the lím
it,
the o
utp
ut
of
the
am
pli-
fier
wíll
be t
orc
ed
to a
híg
h. s
tate
.
The j/n
pnfíef
will
opéra
te w
ith
a
com
mon-m
ode í
nput
vohage
eq
uaJ
to
the
po
sitiv
e s
up
ply
; h
ow
eve
r, t
he g
ain
bandw
idih
arx
J sl
ew
ra
te m
ay
be
de
cre
ase
d in
this
condi-
tion.
When
the
negativ
e com
mon-m
ode
volta
ge
sw
ings
to w
ithin
3V
of
the
ne
ga
tive
su
pp
ly,
an
incr
ea
se i
n input
off
set voitagí
may o
ccur.
The
L
F3
51
Es
bia
sed
by
a ze
ne
r re
fere
nce
wh
ich
allo
ws
norm
al
ciic
uit
op
era
tío
n o
n±
4V
po
we
rsu
pp
lies,
Supply
volla
g-s
le
ss th
an
th
ese
may
resu
lt in
lo
we
r gain
band-
wíd
th a
nd
[lew
ra
te.
Th
e
LF
35
1 w
ill drive
a
2 k
£2 lo
ad
re
sist
an
ce to
±1
0V
ove
r th
e f
ull
tem
pe
ratu
re r
ange
of
0°C
to +
70°C
. If
the
am
plif
ier
is f
orc
ed
to
drive
h
ea
vie
r lo
ad
cu
rre
nts
, how
-
ever
. an
inc
reas
e in
in
put
off
se
t vo
lta
ge m
ay
occ
ur
on
the
negativ
e
volta
ge
sw
ing
and (¡
nally
re
ach
an
act
ive
cu
rre
n!
limit
on
boih
p
ositiv
e
and
n
eg
ativ
e
swin
gs.
Pre
cau
íion
s íh
ould
b
e t
ake
n t
o
en
sure
th
at
the
p
ow
er
supply
fo
r th
e i
nte
gra
ted c
írcuil
ne
ver
beco
mes
reve
rse
d
in p
ola
rity
or
that
the u
ní!
is n
ot
ina
dve
ríe
ntly
inst
alle
d
Det
aile
d S
chem
atic
ba
ckw
ard
s in
a
so
cke
l as
an u
nlim
iied
curr
en!
surg
e
thro
ugh
the
re
su
ltin
g f
orw
ard
dio
de w
ithin
the
IC
co
uld
caus
e íu
sing
of
the in
tern
a!
conducto
r! a
nd r
esu
lt in
a
de
str
oye
d u
nit.
Be
cau
s« t
hese
am
plif
iers
a
re J
FE
T r
ath
er
than
MQ
SF
ET
input
op
a
mp
s th
ey
do
not
require
sp
eci
al
handlin
g.
As
with
mo
st a
mp
lifie
rs,
care
should
be
ta
ke
n w
ith
lead
dre
ss,
co
mp
on
en
! p
lace
me
nt
and
supply
deco
uplin
g
ino
rde
r to
en
sure
sia
bili
ty.
Fo
r «am
pie
, re
síst
ors
fro
m th
e
outp
ut
io an Ínput
sho
uld
be
pla
ced w
ith
the b
ody c
ióse
to t
he i
nput
to m
inim
íze "p
ick-u
p"
an
d m
axim
ize t
he
frequency
of
the
fe
ed
ba
ck
pole
by m
inim
iiing
th
e
cap
aci
tan
ce í
rom
th
e Í
nput
to g
round.
A
fee
db
ack
p
ole
is
cre
ate
d w
he
n
tíie
fe
ed
ba
ck
aro
und
an
y a
mp
lifie
r is
re
sist
ive
. T
he
p
ara
llel
resi
sta
nce
a
nd
cap
aci
tan
ce
fro
m
the
¡nput
of
the
d
evi
ce
(usu
ally
th
e
¡nve
rtín
g Í
np
ut)
to
AC
gro
un
d s
et
the f
req
ue
ncy
of
the
pole
. In
m
any
inst
an
ces
the
fre
qu
en
cy
of
this
pole
is
much
g
rea
ter
tha
n
the
exp
ect
ed 3
dB
fre
qu
en
cy
of
the
clo
sed
loop
gain
a
nd
con
seq
ue
ntly
the
re
ís
neglíg
ible
eff
ect
on
sta
bili
ty
marg
in,
Ho
we
ve
r, í
f th
e
fee
db
ack
pole
is
le
ss
than
a
pp
roxim
aíe
ly
6
times
the e
xp
ecte
d3
d
B
fre
qu
en
cy
a l
ea
d c
ap
aci
tor
should
be
pla
ced fr
om
the o
utp
ut
to th
e input
of
the o
p a
mp
.Th
e v
alu
é o
f th
e
ad
de
d c
ap
acito
r sh
ou
ld
be
suc
h
that
the R
C l
ime
co
n-
sta
nt
of
this
ca
pa
cito
r a
nd
the
re
sist
an
ce
ít
pa
ralle
ls
!s
gre
ate
r th
an
or
eq
ua
l to
th
e origin
al
fee
db
ack
pole
tim
e c
onsta
n!.
Typ
ical
Ap
plic
atio
ns
•n to en
Sup
ply
Cur
rent
Ind
ícat
or/U
míte
rH
i-Z
]fj
Inva
rting
Am
püfie
r
VSUP
PLY
TD
SY
ST
EM
SU
PTL
YV
OLT
AG
E C
ON
NE
CII
ON
IDC
DN
IRO
LCIR
CU
lIR
r
Par
asitl
c Ín
put
capa
cita
nte
Cl
a 13
pF l
or
LF35
1pl
us
any
addlti
onal
layo
ul
capa
cita
n ce
) in
ieocti
wit
h
ftted
back
el
enie
nts
»od
ciea
tet
unde
sira
ble
hígh
¡re
quen
cy p
ole.
To
cnm
pent
ate,
add
C2
such
thai:
R2
C2
& R
1C
1.
Ult
ra-L
ow
(o
r H
igh)
Duty
Cyc
ie P
ulía
Ge
ne
rato
rU
ong T
ime I
nle
gra
tor
tQU
TP
UT
HtG
H '
R1
C E
n
*
tQU
TP
UT
UO
W
wheíe
Vs •
V* +
IV
"ip
wle
aka
ge
ca
pa
cito
r
4.8 -
2
VS
4J -
Vs
2V
S-7
.8
VS -
7.8
* Low
le
aka
ge c
ao
acito
r
50k
po
t U
ied (
p( l«
s í
en
sitiv
f V
0g
adju
st

» 3I
mjQc
O~toc
Q)3a.
ÍDO
OQ)"
(O-itu3co
í a tn "" 5- ^* "° -< —
: g £• ° | £• S- 3 !U °" — ' 3 n 3
" 5 a ? ™ "" °~~o- S =' o' S o <5S 3 "* s-1 o- 2
• 9- 11 S -a
a. p S
Í Í 3 - 3 ,
& 5'
a a. i
oa>won."H6"
U r J í f S S( -a c =.' ^ n (
L^ s S' 9- S Ü'
o. a. 55 o
a>(A
3(D3
LH0036/LH0036a
«k.
800
r-Xsco
O5Ten
C3n>u<- -Q)«> >
o'
la* £*i * i* fU
ííiifoi I ± ¿
£ 2 ü "j §
D;S ** ™ 7n 5 i S' s W. S ~
_ P ai "
g ¡
P a
-n ^-. o"
•o <
3 (/!
- 5*< *"
a.
s ^S c
" 1n Q.2 *,
ñ w
o 3a *
í n
o3 3
í \i n < m v > o o n n ü i n o c i T" ^ í í ' = 5 ' : ^5 ' a O - ^ O H i - ' p p T ; ^ '
¡ r § | f e 1 = 1 I s- 1 i 1 !?.!-! H|| | I f fs!| 5- ; = = S i1 2 íj m ^ , ~ P % í £ í ^ ~ í f
1 "" S e = ? » i - •* " " ? S < ? , 2 . < S -? " * " — ^ s í 3 "" ? i ' c t ¡ ' 5 j i j ¡í 2 1
L - - i 3 J [ > a i o < < > > > > i* > i» > p o > < > > > * ' -1 - H ) > > > > j j n ^ a i a j< o r < i - i . - * " < < < < f < f < ° ~ £ ; - ; < < < > » e < e < w t» « n *•
g ^31 > .< — r* -^ _ ") IA § ™ f ^"~. ' ^ ? ?. f . " ^ S o " " — . " — o S . «
3 " •"* S 3 ". x 5 < .< 3 S S £ S u í K£ ° ¡= 5- ." £~ ~ n rf
P S 5 5
ge e a g e g g g P E g s g g S 5 g *üs% s «¡gsí : s s g e^
,.R 5 S S S £ S ® ° S S S b b b
tn LH
1. 1.0>
s£ 5 s s g g s g S S £ 5 S S " -g " oí " " ° ° 5 5 S S •" 5 S b
0 0 S ° a
< 1 C< 1 ^ 1 1 ^ . - ^ 3 3 3 3 ^ ^ 3 3 3 3S 2 f ^ ^ ^ « < 3 < < < / : ^ « Í 5 5 5 £ £ ? . Í £ « « o í««
\R
OaH
On
Z
-t
£
X
z
•<
*•X
fT
«
g
fl
£
S
cz
5
S1 ^ \_ g5". ¡Spfpl c"S. E|||ÍÍ< oo 1 í í i í í f sU" s a < £ » 2 * C O *
S llfiíí |-f
S í f i? " 35" 33— *1 Q)o" — -W 3-, ^
2.IDV>
O,
S« - H < <
r- w 0 BS _ 5 f I
í * C E f • ai ? S g 3 s^ ¡ B 0 H 1 ,j
— * n 3 OS = n í s-" £ • "í; ? itt ? 31
i *s1
A r J^
s?"s e^is.i |n o" O o" í
'í
09£OOH1/9eOOHl

¿r ¿o coTy
pica
l P
erfo
rman
ce C
har
acte
rist
ics
Sup
ply C
urr
tnt *i
SU
pply
Curr
vnt
vi S
upply
Vo
Oiit
p-Jt
Vol
t»fl«
Sw
¡n9
viS
uppjy
Valti
g»
„' . j
sl
I. •
íl'C
riN
t.íi
lCH
DU
ND
ED
1
1
XI
- ~l S
\~-T
Í1*
\
r¿
-u -;t i
is
s»
PM
k lo
P«*
k O
ulp
üt
Sw
ing
vi
R[_
t.a i
.a i
.o u
n 1
4 u n
SU
ffLY
VO
LUC
ElíV
)
To
t.lt
np
utN
oÍM
Vo
ltio
»*
vi
Fr»
qu»n
cy
H.O
lí.t
ill
Cla
»d
Lo
op V
olt»
9*
íin
YJ
Fr«
tju«r
x:y
Z?!g
lijppi
1
100
1.01
]•
* IM
M
fflEQ
UEN
CVI
Hi]
Com
mon
Mod*
Volti
ff*
nS
uppl
y V
oltiffi
•I-I
'HI,
-JS
~7/
c ,*i
/
GHOU
NOEO
,
i
'
J
' I
S>
/
Liryf
S
igíli
l P
ulí*
R«ip
onn
-SS
-IS
t
II
»
»
IM
SIS
HU
fEflA
IUflE
fCl
1.»'
IMFR
ÍQU
ESC
TIH
il
4-2
0
I 10
U
\!
t TÍ
O IM
14
0 n
i
ypic
a! A
pp
lica
tion
s
Inst
rum
en
utio
n A
mplií
ur
wit
h U
o9ic
Co
ntf
olU
dS
hu
i-D
ow
n
Pie
M
UX
Si9n
»l C
ondilionio
g
|,oU
lion
Am
plií
líf
for
Med
ie»!
Te
l«m
«tr
y
4-21

:! feL
.
App
licat
ions
Info
rmat
ion
TH
EO
RY
O
F
OP
ER
AT
10
N
FIG
UR
E
1. S
implif
i.d L
H00
3G
The
LH
0036
is
a
2
sta
ge
am
plif
ier
with
a h
igh
input
ímpedance
gaín
sia
ge
com
pri
sed o
f A
j a
nd
A3
an
d a
d
iffe
ren
tia
l to
sí
ng
le-e
nd
ed
unity g
ain
sta
ge
, A
3.
Op
era
tio
na
l am
plif
ier,
A
j,
rece
ives
dif
fere
nlí
al
¡nput
signal,
e1
t a
nd
am
plif
ies
it b
y a
facto
r e
qu
al
lo (R
l +
RG
)/R
G.
A,
also
re
ceiv
es
input
e3 v
ia A
3 a
nd R
2.
e3 i
s se
en
as
an ¡
nverí
ing
sig
nal
with
a g
ain
o
f R
1/R
G,
Aj
als
o re
ceiv
es
the
co
mm
on
mode
si
gn
al
BCM
a
nd
proc
esse
s it
with
a
gain
of
+1.
Henee:
V, =
—
- -
e, - —
e2 -
f e
cw
RQ
R
G
By
sim
ilar
an
aly
sís
V3 i
s se
en t
o b
e:
R2
+ R
G
R2
Fo
rRl
= R
2:
Vf/
2R
1\
-V
, =
— U
l (e
2-
ei)
t\G
/ J
(2)
(3)
Als
o,
for
R3
= R
5 =
R4 =
R6
, th
e g
ain
of
A3 =
1.
and:
[4)
As
can
be
se
en
for
íde
ntí
ca
lly
ma
tch
ed
re
sist
ors
,e
CM
¡í
ca
nce
lled o
ut,
a
nd
the
d
iffe
ren
tia
l gain
is
dic
tate
d b
y equatio
n (
4).
Fo
r th
e L
H0
03
6,
eq
ua
tio
n
(4)
red
uce
s to
:
50
k(5
a)
Th
e c
lose
d loop
ga
in m
ay
be
se
l to
an
y va
lué fr
om
1
(RG
= ") to
10
00
(RG s
5Q
Í1).
Eq
ua
tiu
n (
5a
)re
-arr
an
ge
d in
mo
re c
on
ven
ien
t ío
rm m
ay
be
use
dto
sel
ect
RG
fo
r a
de
sire
d gain
:
RG
-50
k(5
b)
US
E O
F B
AN
DW
IDT
H
CO
NT
RO
L
(pin
1
)
In t
he
sta
nd
ard
co
nfig
ura
tio
n,
pin
1 o
í th
e L
H0036
is
sim
ply
g
rou
nd
ed
. T
he
am
plif
ier'
s sl
ew
ra
te
in
this
c
on
fíg
ura
tio
n
is lY
pic
ally
Q
.3W
fJS
a
nd
sma
ll
sig
na
l b
an
dw
idth
35
0 k
Hz f
or
Ay
CL
= '• '
n s
oma
sp
plica
tio
ns,
pa
rtíc
ula
rly
at
low
fre
qu
en
cy, ii
ma
y
be
d
esí
rab
le
to lim
it
ba
nd
wid
th
in o
rde
r to
mín
i-
miz
e t
he
ove
rall
nois
e b
an
dw
idth
of
the
de
vic
e.A
resi
sto
r R
B\H
m
ay
be
pla
ced
b
etw
ee
n p
in
1 a
nd
gro
un
d
to a
cco
mp
lish t
his
purp
ose
. F
igure
2 s
how
sty
pic
al sm
all
signal
ba
nd
wid
th
vers
us R
BW
,.* IT
'IJS
"niítílT
Lüár
O.IM
I.O
M
1W
1MM
1D
OO
M
flr,-
flES
IÍIlfC
EF
"0«f
l'l|IO
EB
OU
ND
(a
FIG
UR
E 2
. B
undw
ldth
vi R
BW
It
als
o s
hould
be n
ote
d t
ha
rla
rge
sig
na
l bandw
idth
an
d
sle
w
rate
m
ay
be
sd
juste
d d
ow
n
by
use
of
RB
W.
Fig
ure
3
is
plo
t o
f sl
ew
ra
te v
ersu
s R
BW
-
1.0U
K,n
-«Í
SIII
ÍXC
E ÍR
DM ÍI.
N 11
0 C
FIG
UR
E 3
. O
utp
ut
Sltw
R
.lt
vi R
gyV
CM
RR
C
ON
SID
ER
AT
ION
S
Use
o
í P
in 9
, C
MR
R
Pre
iet
Pin
9
sho
uld
.be
g
rou
nd
ed fo
r nom
inal
opera
tíon.
An
inte
rna
! fa
cto
ry
trim
me
d
resis
tor,
R
6,
will
yie
ld a
CM
RR
in
exc
ess
of 8
0 d
B [
for
AV
CL =
10°l'
Should
a h
igher
CM
RR
be
de
sire
d,
pin
9
sh
ould
be
left
open
and
th
e
pro
ced
ure
, in
th
is se
ctio
nfo
llo
we
d.
DC
Q
ff-s
et
Vo
ha
ge
a
nd
Co
mm
on
Moda
Re
jecti
on
A
dj'u
stm
em
s
Off
-se
t m
ay
be n
ulle
d u
sing
the cír
cuit s
ho
wn i
nF
igu
re 4
. FIG
UR
E
J. V
QS
Ad
jujlm
en
t C
ircu
í!
Pin
8
is
also
u
sed
to
imp
rove
th
e c
om
mo
n m
ode
reje
cti
on
ra
tio
as
sho
wn
in
Fig
ure
5.
Nuil
is
App
licat
ions
In
form
atio
n
ach
ieve
d b
y a
lte
rna
tely
apply
ing ±
10
V
(fo
r V
&
V~
=
15
V)
to
ihe
in
puts
a
nd
a
dju
stin
g
Rl
for
min
ímum
ch
an
ge
at
ihe outp
ut.
FIG
UR
E 5
. C
MR
R A
djo
itn
un
t C
íicu
ii
Th
e
cir
cu
its
of
Fig
ure
4 a
nd 5
ma
y b
e c
om
bin
ed
as
sho
wn
in
Fig
ure
6
to
acc
om
plis
h
bo
th V
os
an
d
CM
RR
nuil.
H
ow
eve
r, th
e V
os
an
d C
MR
Ra
dju
stm
en
t a
re
inte
ractive
a
nd
se
vera
l it
era
tio
ns
are
req
uir
ed
. T
he
p
roce
du
re
for
nuil
should
st
art
with
th
e i
nputs
gro
unded.
FIG
UR
E 6
. C
ombi
riMi
CM
RH
, V
OS A
d¡u
itm«nt
Citc
uit
R2
is
ad
just
ed
for
Vos nuil.
An
inp
ut
of
+-1
0Vis t
hen
ap
plie
d a
nd R
l ¡s
ad
just
ed f
or
CM
RR n
uil.
Th
e p
roce
du
re i
s th
en
re
pe
ate
d until
the o
ptim
um
¡s a
ch
ieve
d.
A c
ircu
it w
hic
h o
verc
om
es
ad
justm
en
t ¡n
tera
ctí
on
is
sho
wn
¡n F
igure
7.
In th
is c
ase,
R2
¡s
ad
just
ed
firs
t fo
r ouip
ut
nuil
of
the U
H0036.
Rl
is t
hen
ad
just
ed
for
ou
tpu
t nuil
with
+
10
V in
put. I
t is
alw
ays
a good
id
ea
to
check
C
MR
R nuil
with
a
-10V
in
put.
T
he
o
ptim
um
nuil
ach
ieva
ble
w
ill
yie
ld
the
hig
he
st
CM
RR
ove
r th
e a
mp
lifie
rs c
om
-
mo
n m
od
e
ran
ge
.
FIG
UR
E 7
. tm
pro
v.d
VOS
. M
RR
Nulling
Cir
cuí!
AC
C
MR
R
Co
niíd
era
tio
ns
Th
e
ac
CM
RR
m
ay
be i
mp
rove
d u
sing
th
e c
ircu
í!
oí
Fig
ure
8.
4-23
FIG
UR
E 8
. lm
prov
«d A
C C
MR
R C
ircu
it
Aft
er
ad
justi
ng
R
l fo
r best
de C
MR
R
as
be
fore
,R
2 s
ho
uld
b
e a
dju
ste
d ío
r m
ínim
um
pe
ak-
to-p
ea
kvo
lta
ge
at
the
ou
tpu
t w
hile
a
pp
lyin
g
an
ac
co
mm
on
m
ode
si
gnal
of
the m
áxim
um
a
mp
litu
de
an
d f
req
ue
ncy
of
¡nte
rest
.
INP
UT
B
IAS
C
UR
RE
NT
C
ON
TR
OL
Undern
om
inal
op
era
tin
g c
on
diu
on
s (p
in 3
gro
un
d-
ed
l, t
he L
H0036
re
qu
ire
s in
put
curr
em
s o
f 4
0 n
A.
Th
e
inp
ut
cu
rre
nt
ma
y b
e r
ed
uce
d b
y in
se
rtin
g a
resi
sto
r (R
B)
be
twe
en
3
an
d
gro
un
d
or,
a
lte
r-
na
tive
ly,
be
twe
en 3
an
d V
.
Fo
r R
g
retu
rne
d t
o
gro
un
d.
the in
put
bias
cu
rre
nt
ma
y b
e p
red
icte
d
by:
V* - 0.5
'BIA
S —
,
,nB
, o
nn 0
(6a)
or
V+
-0
5-
(4
x 1
|6b]
800 l
aiA
S
Wh
ete
: IBTA
S = 'n
pu
t B
ias
Cu
rre
nt
(nA
)
RB
=
Ex
tern
al
Re
sist
or
con
ne
cte
d b
etw
ee
n
pin
3 a
nd
gro
un
d
(Oh
ms)
V+ »
Po
siti
ve S
upply
Vo
lta
ge
(Vo
lts)
Fig
ure
9 i
s a
plo
t o
f in
put
bias
cu
rre
ní
vers
us R
B.
1H
1M
I
«, -
«EIiS
ItfgC
E fB
OM M
\D C
FIG
UR
E 3
. In
ptJI
Bui C
unenl ti i
Fu
ne
lion
o( R
g
As
ind
ica
ted
a
bo
ve.
RB
may
be r
eiu
me
d
to
the
ne
ga
live
supply
vo
lta
ge
. In
put
bias
cu
rre
nt
rnav
the
n b
e p
red
icte
d b
y:
(V*
- V
") - 0
.5
8IA
S =
4
x1
0a-8
00
RB

..^-.
í ,~
<D CO O O I
BD
Ol
' (8)
Wh
ere
: IBIA
S =
Inpui B
las
Cu
rre
nt
(nA
)
Ra
=
Ext
ern
al
resi
stor
co
nnec
ted
betw
een
pin
3 a
nd
V"
(Ohm
s)
V"5"
= P
ositi
ve S
uppl
y V
olta
ge (
Vol
ts)
V~
= N
eg
ativ
e S
upply
Vo
lta
ge
(Vol
ts)
1MM
R, -
«S
ISltN
CE í
RO
M n
tt 1
V lu
í
FIG
UR
E 1
0. I
nput
Bía
i Cüt
r.nt
>s ,
Fun
clio
n o(
Rg
Fig
ure
10
is
a p
lot
of
input
bias
curr
en!
vers
usR
B
retu
rne
d to
V
ít s
hould
be
no
ted
that
ban
d-w
idth
is
aff
ect
ed
by c
hang
es i
n R
B.
Fig
ure
11 i
s a
plo
t o
f bandw
idíh
ver
sus
RB.
R,-
ftE
US
imL
Ffl
DM
NN
1TB
Cft
OW
DU
!)
FIG
UR
E ll.U
nily
Gjin
Bjn
dw
idth
íii
Fuoetion
of
RB
BIA
S
CU
RR
EN
T
RE
TU
RN
PA
TH
C
ON
S1D
6RA
TIO
IMS
Th
e L
H0036
exh
ibhs
input
bias
cur
rent
s ty
pic
allv
¡n
the
40
nA
re
gión
in
eac
h in
put.
Thi
s cu
rren
tm
ust
ílow
th
rou
gh R
lso
as
show
n ín
F
igur
e 1
2.
PIC
UR
E 1
2. B
iii C
uri.
nt
fí*w
n P
ith
In a
typ
ica
l a
pp
lica
tion
, V
s =
±1
5V
, lB
i 'I
B2 3
:4
0 nA
.» t
he
to
tal
curr
en
t.
]T.w
ou
ld í
low
th
roug
hR
ISO
cau
síng
a v
olta
ge r
ise
at p
oin
l A
. F
or v
alúe
s°f
R
ISO >
15° M
^. ln
e v
olta
ge a
t poin
t A
exc
eeds
the
+ 1
2V
co
mm
on
rang
e o
f th
e de
více
. C
lear
ly,
for
RIS
O
= °
°,
the
LH
0036
wo
uld
be
dfiv
en
topo
sitiv
e sa
tura
ción
.
The
im
plíc
aiio
n
ís
tha
t a
fin
ite
im
peda
nce
mus
tbe
su
pplie
d b
etw
ee
n th
e in
put
and
po
we
r su
pply
gro
und.
The
va
lué
of
the
resi
stor
Ís
d
icta
ted
by
the
má
xim
um
input
bias
cu
rre
nt,
an
d th
e c
omm
onm
ode
volla
ge.
Under
wo
rst
case
conditi
ons:
„
VC
MR
—
VC
M
RIS
O < -
O
)
Whe
re:
R
=
Com
mon
Mod
e R
ange
{1
0V
fo
rth
e LH
0036)
=
Com
mon
M
ode
Vo
lta
ge
In a
pp
líca
tion
s Ín
wh
ich t
he
sig
nal
iourc
e ¡
t floit-
íng,
suc
h ai
a th
erm
oco
uple
, one
end
of
the
sour
c*m
ay b
e gr
ound
ed d
ire
ctly
or
thro
ugh
a r
esis
tor.
GU
AR
O
OU
TP
UT
Pin
2
of
the
LH
00
36
Ís
pro
víd
ed
as a
gua
rd d
rive
pin
in
th
ose
strm
ge
nt
ap
plic
atio
ns
whic
h r
eq
uir
eve
ry l
ow
lea
kage
and
mín
imum
Input c
ap
aci
tan
ce.
Pin
2 w
ill a
lway
s b
e bi
ased
at
the
inpui
com
mo
nm
ode
volta
ge
. T
he
sour
ce i
mpe
danc
e lo
oki
ng
in
topin
2 Í
s a
pp
roxi
ma
tely
15 k
fi.
Pro
pe
r use
oí
the
gu
ard
/sh
ield
pin
ís
show
n in
Fig
ure
13.
FIG
UR
E 1
3. U
« o
f G
uard
For
ap
plic
ati
on
sre
qu
irin
ga
low
er s
ourc
e im
peda
nce
tha
n 15
kfi,
a u
nity
gain
b
uff
er,
su
ch
as t
heLH
OO
D2
may
be
¡n
sert
ed
betw
een
pin
2 an
d th
ein
put
shie
lds
as s
ho
wn
in F
igur
e 14
.
FIG
UR
E H
.Gu
jrd
Pin
Wilh B
ullti
4-24
pefin
ition
of T
erm
s
Bandw
idth
: T
he
fr
=qu
ency
at
whic
h t
he v
olti
ge
gain
is
re
duce
d to
0.
707
of
th
e lo
w
freq
uenc
y
(de)
va
lué
.
Clo
nd
Loop G
iín,
AV
CL
* T
he ral¡0
of th
e o
utp
ut
volta
ge
swin
g to
th
e in
put
volta
ge
swin
g de
ter-
min
ed b
y A
VCL
- 1 +
(5
0k/R
G)-
Whe
re:
RG
•G
ain
S<í
Re
sist
or.
Com
mon
M
od<
Rij«
^íon
R
atio
: T
he
ra
tio
of
ínput
volta
ge
rang
e to
th
e pe
ak-t
o-pe
ak c
hano
e in
-
off
set
volta
ge o
ver
thís
ran
ge.
Gai
n E
qu
atio
n A
ccu
racy
: T
he
devl
atío
n o
f m
eac
tual
clo
sed
loop
gai
n fr
om
th
e pre
dic
ted
clo
sed
loo
p g
ain, A
vcu -
1 +
(5
0k/
RG
) fo
r th
s sp
eci
fied
clos
ed loop
gai
n.
Input
Bia
s C
urr
en
t: T
he c
urr
en
t flo
win
g at
pin
5an
d 6
under
the
spe
cifie
d op
erat
íng
condili
ons.
Input
Off
set
Cu
rre
nt:
Th
e di
ffer
ence
bet
wee
n th
eÍn
put
bias
cu
rre
nt
at
pins
5
an
d 6;
í.e.
I0s
"
Input
Sta
gt
OH
»it
Volt^«,
V|o
s=
Th
e v
olta
gew
hic
h m
ust
be
app
lied
to t
he i
nput
pins
to
forc
é
the
ou
tpu
t to
zer
o vo
lts f
or
AV
CL
"
10Í
-
Ou
tpu
t S
tage
O
ffse
t V
olta
je,
VQ
OS
: T
he v
olta
gew
hic
h m
ust
be a
pplie
d t
o t
he i
nput
of t
he o
utp
ut
stag
e to
pr
oduc
e le
ro
outp
ut
volta
ge.
It c
an
be
mea
sure
d by
me
asu
rin
g th
e o
vera
ll of
fset »
unity
gsi
n a
nd s
ub
tra
ctin
g V
IQS
-
AV
CL"
I O
ffif
lt V
olu
g«:
Vo
os
- V
1000
VIIQ
S
^VC
L
Pow
«r
Supply
R
«¡a
ctÍo
n
Ra
tio
: T
he
ra
tio
of
the
chan
ge
Ín
off
set
volta
ge
, V
os,
to th
e c
hang
o ¡n
supp
ly
volta
ge
pro
duci
ng it,
Re
iiito
r, R
B:
An
op
tio
na
l re
sist
or p
lace
d be
twee
npin
3
of
th
e
LH
0036
an
d
gro
un
d (o
r V
1
to
redu
ce
the
input
bias
cu
rre
nt.
Re
íiito
r,
RBW
: A
n
oplío
nal
resi
stor
pl
aced
be
-tw
ee
n pin
1 o
f th
e
LH
0036
and
gro
un
d (o
r V
)
ío
redu
ce
the
ba
nd
wid
th
of
the
ou
tpu
t st
age.
Re
iiito
r,
RQ
: A
ga
in
sett
ing
resi
stor
co
nn
ect
ed
betw
een
pin
s 4
a
nd
7 o
f th
e L
H0036
in
ord
er
to
pro
gra
m t
he
gai
n fr
om
1 t
o 10
00.
S«nlin
o
Tim
e:
The
time
be
twee
n th
e in
itia
tion
of
an
¡nput
step
fu
nctio
n a
nd
the
time
whe
n th
eo
utp
ut
volta
ge
has
sett
led
to
wíthin
a
spec
ified
err
or
band
o
f th
e f
ina
l o
utp
ut
volta
ge
.
Nat
iona
lS
emic
ondu
ctor
CD
4051
BM
/CD
4051
BC
Sin
gle
8-C
hann
el A
nalo
gM
ultip
lexe
r/D
emul
tiple
xer
CD
4052
BM
/CD
4052
BC
Dua
l 4-
Cha
nnel
Ana
log
Mul
tiple
xer/
Dem
ultip
lexe
rC
D40
53B
M/C
D40
53B
C T
riple
2-C
hann
el A
nalo
gM
ultip
lexe
r/D
emul
tiple
xer
Gen
eral
D
escr
iptio
nT
hese
ana
log
mul
íiple
xers
/dem
ultip
lexe
rs a
re d
igita
llyco
ntro
lled
anal
og s
wltc
hes
havi
ng l
ow
"ON
"im
pe
da
nce
and
ver
y lo
w "O
FF"
leak
age c
urre
nts.
Con
trol
oí an
alog
sign
áis
up l
o 1
5Vp.
p ca
n be
ach
ieve
d by
dig
ital
signal
ampl
itude
s of
3-15
V.
For
exam
ple,
ií V
DD =
5V
, Vs
s=
0V
and
VE
E=
-SV
, ana
log
sign
áis
(rom
-5V
to
-í-S
Vca
n be
cont
rolle
d by
dig
ital i
nput
s of
0-5
V. T
he m
ultip
lexe
r ci
r-cu
its d
issi
pate
ext
rem
ely
low
qui
esce
nt p
ower
ove
r th
efu
ll VQ
O -
Vss
an
d V
DD -
VE
E s
uppl
y vo
lt ag
e ra
nges
, ind
e-pe
nden
! of t
he lo
gic
sí a
te o
f the
con
trol
sig
ná
is. W
hen
alo
gic
al
"1"
is p
rese
n! a
t th
e In
hib
it In
put
term
inal
all
chan
nels
are
"O
FF
".
CD
4051
BM
/CD
4051
BC
is a
sin
gle
8-c
hann
el m
ulti
ple
xer
havi
ng t
hree
bin
ary
cont
rol ¡
nput
s. A
, B
, and
C, a
nd a
n in
-hi
bit
inpu
t.The
thre
e bi
nary
sig
náis
sel
ect 1
oí 8
cha
nnel
sto
be
turn
ed "O
N" a
nd c
onne
ct t
he in
put
lo t
he o
utp
ut.
CD
4052
BM
/CD
4052
BC
Is
a di
lfere
ntia
l 4-
chan
nel m
ulti
-pl
exer
hav
ing
two b
inary
contr
ol i
npuís
, A a
nd B
, and
an
inhib
it in
put.
The
two
bina
ry í
npuí
sig
náis
sel
ect
1 or
4pa
irs o
í ch
anne
ls
to b
e tu
rned
on
and
conn
ect
the
dlf-
fere
ntia
l ana
log in
puts
lo t
he d
iffe
ren
tlal o
utp
uís
.
CD
4053
BM
/CD
4053
BC
Is
a tr
iple
2-c
hann
el m
ultip
lexe
rha
ving
thre
e s
epár
ate
dig
ital c
ontr
ol i
nputs
, A, B
, and
C,
and
an in
hlb
ll in
put.
Eac
h co
ntro
l inp
ut s
elec
ta o
ne o
f a
paif
of c
hann
als
wh
ich
are
conn
ecte
d in
a s
ingl
e-po
ledo
uble
-thr
ow c
on
figu
raro
n.
Fea
ture
s•
Wíd
e ra
nge
of d
igita
l a
nd
ana
log
sign
al l
evéi
s: d
igita
l3-
15V
, ana
log
tol5
Vp
.p
• Low
"O
N" r
esis
tanc
e: S
OS
(typ.
) ov
er e
ntir
e 15
Vp.
p
sign
ai-I
nput
ran
ge f
or V
DD-V
EE=
15
V
• H
igh "
OF
F"
resi
sta
nce
: cha
nnel
lea
kage
of
±10p
A(t
yp
.)a
tVD
O-V
EE =
10V
• Lo
gic
leve
l con
vers
ión
for d
igita
l add
ress
tng
sign
áis
of 3
-15
V (V
DO -
Vss
= 3
-15
V) í
o s
wilc
h an
alog
sig
náis
tol5
Vp.p
(VO
D-V
EE =
15V
)
• M
alch
ed s
wltc
h ch
arac
teri
stic
s: A
RQ
N=
5Q
(ty
p.) f
or
• V
ery
low
qui
esce
nt p
ower
dis
sipa
tion
unde
r all
dig
ilal-
con
íro
i in
put
and
supp
ly c
onditi
ons:
1¡A
V (
typ.
) at
Bin
ary
addr
ess
deco
ding
on
chip
Con
nect
ion
Dia
gram
s
CD
-105
1BM
/CD
4051
BC
CD
4052
BM
/CD
4D52
BC
N/OU
1 nlr,,
lw
IN/O
UI
CD
4053
BM
/CD
4053
BC
OU
IIN
IV/Q
UI
ti r- i
ti 1
11 í
u 4
17 5
11 í
to 7
,
J
1s
Qun
s J IN
.'DU
I<*
¡V
_ v
j.
1>_
IS'D
UI
OU
1'1
N
IN.'O
UT
"QU
TIN
IS
OU
I
TO
P V
IEW
.""
" >
*'
*>
íi
Abs
olut
e M
áxim
um R
atin
gs
Rec
omm
ende
d O
pera
ting C
onditi
ons
VO
D
DC
Su
pp
ty V
olt
ag
e -0
.5 V
dc
ío +
18 V
dc
VD
D
DC
Su
pp
ly V
olt
ag
e 4
5 V
dc
to +
15 V
dc
V|N
nput
Vo
lta
ge
-0.5
Vd
c jo
VD
D +
0.5
Vd
c
V1N
Input
Vo
ltag
e
^V
toV
oo
Vd
c
Ts
Sto
rag
e T
em
pe
ratu
re R
ange
-6
5°C
to +
150
°C
TA
O
pe
ratin
g T
em
pe
ratu
re R
angc
Pn
Pac
kage
Dis
sip
atio
n
SO
Om
W
40
51
BM
/40
52
BM
/40
53
BM
-5
5°C
to +
]25
°C
T°
Le
ad
Te
mp
era
tura
(so
Kfe
rins.
IQ
seco
ncM
300°C
4051B
C/4
052B
C/4
053B
C
-4Q
°C t
o +
85°C
DC E
léct
rica
! C
ha
ract
eri
síic
s (N
ote 2)
IDD
Par
amei
er
Qui
esce
nt D
evic
e C
urfe
nt
Con
ditio
ns
VO
D=
5V
Sign
a np
uis
(V]s
) an
d O
utpu
ts (
Vogl
"ON
" R
eiis
lanc
e (P
aak
A"O
N"
Fesí
sian
ceB
etw
een
Any
Tw
oC
tiann
els
"OFF
" C
hann
el L
eaka
geC
urte
nt, a
ny c
hann
el"O
FF
"
"OF
F"
Cha
nnel
Lea
kage
Cur
rent
, al
l cna
nnel
s"O
FF
" (C
omm
onO
UT
/IN
)
RL»
iokn
(any
cha
nnel
sele
cted
)
RL
= l
Okíl
'any
cha
nnel
sele
cted
)
VDD
= 7
.5V
.0/1
= ±
7.5
V,
-55
°C
+25°
C
+12
5°C
Min
M
ax
5 10 20
Min
Typ
M
ax
M¡n
5 20 20
Max
150
500
600
fiA
VDD
- 2.
5V.
VE
E =>
-2.5
Vor V
OD
= 5
V.
VD
O=
5V
VEE-
-SV
orV
oo
= 10
V.
orV
DD=
15V
,
VDD
- 2-
5 v.
or V
Do
= S
V,
vEV
E=D
oV°V
'
VDD
= 7-
5 v,
orV
DD
= 15
V.
/o-o
v
nhib
it =
7.5
V
CD
4051
VDD
= 7
-5 v
.V
Ee
= -7.5
V,
CD
4Q52
0/1
-O
V.
/0 =
17.5
V
CD
4053
2000
310
220
i | =50
' =2
00
=200
=200
270
¡
120
80 10 10 5 :0.0
]
:0.0
8
10.0
2
2500
400
280
Í50
1200
±200
1200
3500
580
400
±500
±20
00
=200
0
±20
00
n n n n n n nA nA nA nA
'-mnol
Inpu
is A
, B
, C a
nd In
hib
it
•ih
Low
Lev
el In
put
Vol
tage
i
!|5
<2
fjA
on
all
OF
F c
hann
els
,
VDD-
SV
i.sVQ
D =
lov
• 3.
0
Hig
h L
evel
Input
Vol
tage
V
= 5
V0
0=
1Q
¡VD
D»
15
Inp
utC
uri
en
t IV
po
= 1
5V
,
1
3.5
í 3.
57
, 7
;
• 11
i 11 !
1.5
3.0
¡4.
0
1.5
3.0
4.0
V V V
3.5
!
V7
i V
n
! v
/ec
-OV
i :
-i
fc-
-0.1
í
-io
-3;
-o.í
;Jc
c =
OV
:
.„
=«
.'
'0.
1
10"=
0.1
-1.0
HA
• •
- ow
-rai
ion.
•'•'e
1. A
ll vo
itage
i mm
ufeo
f,,tn
ies
t>rc
i 10
Vgg
uni
etl O
tnr-
.vli' I3«.'i
eo
5-15
3

o a o- 5 Q ?• O o « n o do
acó
i-C
Oo
un
oo
T ^
rO
OO
O
mea
T-
CO
5O m
o o
T T
OO
ÜO
DcT
lEle
ctric
al C
hara
cter
istié
Í\com
'd.)t
Not
e2)
IDO
PlIlfTM
tff
Quíe
icenl
Dev
ice
Cu
rte
nt
Conditioni
yD
D-5
VV
DD -
iov
VD
D-I
SV
<f"
-4l
M¡n
Max
20
40 80
Min |
Typ ¡
Max
20 40 80
Min
Max
150
300
600
Unh
i
fiA MA
PA
Sio
nal In
puts
(V
K)
and
Ou
tpu
ts (
Vos)
,
RON
¿RO
N
Co
ntr
o
VIL
VIH
IIN
'ON
" R
esis
tanc
e {P
eak
ot V
EE<V
IS<V
DD
)
¿"O
N"
Res
ista
nce
Bet
wee
n A
ny
Tw
oC
ha n
nei
s
"QF
F"C
hanne!
Leaf
cage
Cu
rte
n!,
an
y ch
annel
"QF
F"
"OFF
" C
hannel
Leak
age
Cu
rre
nt.
all
cnannelí
"OF
F"
(Com
mon
OU
T/IN
)
Inp
uts
A,
B, C
and Inhib
it
Lo
w L
evel
Input
Vo
ltag
e
Hig
h L
evel
Input
Vo
ltag
e
Inpui C
urr
ent
RL"
lof
cnany c
hannel
ele
cted)
ñ[_=
lotc
íila
ny
channel
sele
cted
)
VO
D-7
.5V
,
VD
O •
2.5
V,
VE
E--
2.5V
or V
DD
- s
v,V
EE
-OV
VDD
• sv
,V
EE
--5
Vot
VD
D-
iov,
VE
E^O
V
VDD
• 7.
5V.
VEE
- -7
.5 v
ot V
DD
- is
v,VE
E = o
vVD
D -
2.5 v,
VE
E--
2.S
Vo
rVD
D^S
V.
VE
Ea
QV
VDD
= 5
VVE
E = -
SV
of V
DO "i
ov,
VEE =
OV
VDD
-7.5
V,
VEE
• -w
vof
VD
DS
isv.
VE
E =
-7.5
V0
/I =
±7
.5V
, I/
O-O
V
Inhib
it -
7.5
V
CD
4051
VDD
= 7
-5V
,V
EE
--7
-SV
, C
D40
53
I/O
- =7.5
VC
D40
53
VE
E-
Vss
RL=
níí
toV
Ss
llS
<2fjA
onall O
FF
Cnanneli
V]S
- V
DD
lhru Ikíl
VD
D-S
VV
DD
- io
v
VDD
-5VD
D -1
0VD
D -1
5
VD
D-I
SV
, V
EE
-OV
VIN
-OV
VD
D*
>sv,
VEE
= O
VV
IN-
isv
3.5
7 11
1
2100
330
230
=50
=200
=200
=200
1.5
3.0
4.0
-0.1 0.1
3.5
7 11
270
120
80 10 10 5 ±0.0
1
±0.0
8
=0.0
4
=0.0
2
-10-5
10-5
2500
400
280
=50
=200
=200
=200
1.5
3.0 4.0
!f i U
3200
520
360
±500
!
±2000
=2000
=2000
1
1.5
3.0
i 4.0
| i-0
.1
¡
¡ -1.0
0.1
I Í
1.0
¡
n n n n n n nA nA nA nA V v!
V V V V ¡* i '
Ñau
I:
-Aw
oiu
» M
í'im
um
Rilm
gi'
nc
Ihoi
e v
alue
i bey
ond
"*>'":M
Ihe
Wfe
ty o
f th
e d
ev.c
e onnot
De
gua
ranl
teO
. E
'CtB
l lo
. O
cMtllin
B T
íf'IM
'<'1"
fl»ns«
" tn
ry >
t. n
ol m
..nl l
o ir
oply
th
,t iht
otv
tctt
sdo
uld
t» o
p«at
*a «
tf.«
e l.m
itt.
Tu*
HW
f oí
"E
lecw
teil
Char.
ele
nili
ci
mov
idei
con
d'lio
nf t
a. K
IO
tvic
r o
wtí
tio
n.
Not
t 2:
All
vottJ
9« m
mufe
c w
iin r
elp
tcl t
o V
jg u
nltl
! at
heiv
wM
t jpealie
d.
•"
5-15
4
AC E
lect
rical C
hara
cteris
tics
.
t
.
M
TA *
25°C
, t,
n t
| =*
2Q n
s, u
nle
is o
thcrw
íse s
pe
cíf
ied
.
tPZ
H,
tPZ
L
tPH
Ztp
LZ
CIN
COUT
CIQ
S
Pa
rim
ete
f
Pro
paga
uon
Del
ay T
ime
fro
mIn
hib
it t
o S
ígna
l O
utp
ut
(cha
nnel
turn
ing
on)
Pro
pagatio
n D
elay
Tim
e f
rom
Inhib
it t
o S
tgna
l O
uio
ut
(cha
nnel
turn
ing
off
)
Input
Cap
acita
nce
Co
ntr
ol In
put
Sig
na!
Input
[IN
/OU
T]
Ou
tpu
t C
apac
ítan
ce(c
om
mon O
UT/IN
J
CD
4051
CD
4052
CD
4053
Fe
ed
thfo
ug
n C
apac
itanc
e
Pow
er D
iisip
atio
n C
apac
itanc
e
CD
4051
CD
4052
CD
40
53
Candid
a n
t
VEE-
VSS-
OV-
RL-
I kü
CL-S
OPF
VEE-
VSS-
OVH
L-I «
iC
L-5
0p
F
VEE-
VSS-
OV
Vp
p
SV
IOV
15
V
SV
IOV
15
V
IOV
IOV
IOV
¡ M
inTY
P60
02
25
160
210
100
75 5 10 30 15 8 0.2
110
140
70
Max
1200
45
0320
420
200
150
7.5 15
Uníti ns ns ns ns ns ns PF
PF
PF
PF
PF
PF
PF
PF
PF
Sig
na!
Inputs
(V
|2)
an
d O
utp
uti (
Vo
s)
'PH
L,tP
LH
!C
on
tro
l
IPH
L,
fPL
H
Sín
e W
ave
Res
pons
o(D
isto
ftio
n)
Fte
qu
en
cy R
espo
nse,
Channel
"ON
" (S
itie
Wav
e In
put]
Cfo
ista
lk B
etw
een
An
y T
wo
Cha
nnel
s (f
req
ue
ncy
at
40
dB
l
Pro
paga
tion
Del
ay S
igna!
Input
lo S
igna
! O
utp
ut
nputs
. A
, B
, C a
nd Inhib
it
Cro
ssta
lk
Pro
pagatio
n D
ela
y T
ime fto
tnA
ddre
ss t
o S
ignal O
utp
ut
[cna
nnel
s "O
N" or
"OF
F"]
RL-
lokí
íÍIS
-UH
ZV
|S-5
Vp
_p
VE
E-V
SI-
OV
RL" i
ka
VE
E -
vss
= o
v. v
,s •
5vp
_p.
20
log
10V
osA
'ls--
3d
a
RL
- i k
íí, V
EE
- vss
= o
v, V
|g«
5vp_
p,2
0lo
9,0
Vo
sA/|
s-->
Od
B
RL • i
ka
VEE
- vs
s - o
v, V
¡S(A
) - 5
Vp^
20 lo
gio
VQ
SlB
lA'ls
tA] =
-10
dB
[N
ote
3|
VEE-
VSS-
OVC
L-S
OpF
vE
E"V
ss
-OV
, R
L~ l
Ofc
fia
lbo
th e
ndi
of
cha
nn
el.
Input
Squ
are
Wav
e A
mp
lítu
de
= I
OV
VEE-
VSS-
OVC
L-S
Op
F
IOV
IOV
IOV
IOV
5V
1Q
V15V
IOV
5V
IOV
1S
V
0.04 40 10 3 25 15 10 65
500
180
120
55
35
25
1000
360
240
%
MH
z
MH
i
MH
i
ns ni
ni
mV
Ipe
ak)
ni
ns ns
'"le
3;
A, B
ate
lwo a
ibura
ty e
nann
elí w
iih A
tuin
ed
"ON
" an
d B
"O
FF". 5
-155

Blo
ck D
iagr
ams
íruth
Tab
le
1"
LOG
ICuv
aC
ON
VE
RS
IÓN
1
BIK
fiR
YT
QID
F 2
OE
CD
DtR
WIT
HlN
Him
3s
i2
n T
i: ^'
f—T s rr s [~T S
CD
40
53
BM
/CD
40
53
BC
¡ IN
PU
TS
TA
TE
S
' "O
N"
CH
AN
NE
LS
|
! 1N
HIB
IT
C
B !
A
CD
4D51
E
i o
o • o
: o
o0
00
1
1
00
10
?
00
11
3
! o
1
00
j0
1
0 • i
5
• 0
1 '
0 5
0
11
1
J
I •
' '
NO
NF
1 '
CD
4052
B
' O
X.
DY
IX.
1Y
i 3
X.
?Y
: 3
X.3
Y
NO
N E
'CD
40
53
BÍ
< ci.
bu.
Jí-
, c».
li>. ¿
y'
, e
x. b
y. J
- •
C«
. tlf. '¥
•
ÉY. b
<. j-
ev. U
», j
y,
cv. U
v. »
«
Cv.
BV.
jyi
NO
NE
'
*0o
n tC
*irC
P"i
i-M
i
Recommended

















