1
Frekventne metode analizesistema automatskog
upravljanja
• Pored odskočne pobude pri ispitivanju linearnihsistema automatskog upravljanja se čestoprimjenjuje i prostoperiodična, odnosno sinusnapobuda. U okviru frekventnih metoda se analizira odziv sistema u stacionarnom stanju naprostoperiodičnu pobudu. U okviru funkcijeprenosa SAU G(s), promjenljiva s se mijenjakompleksnom učestanošću jω, tako da se analizira funkcija prenosa sistema u frekventnom domenu G(jω), gde je ωpromenljiva učestanost pobudnog signala.
2
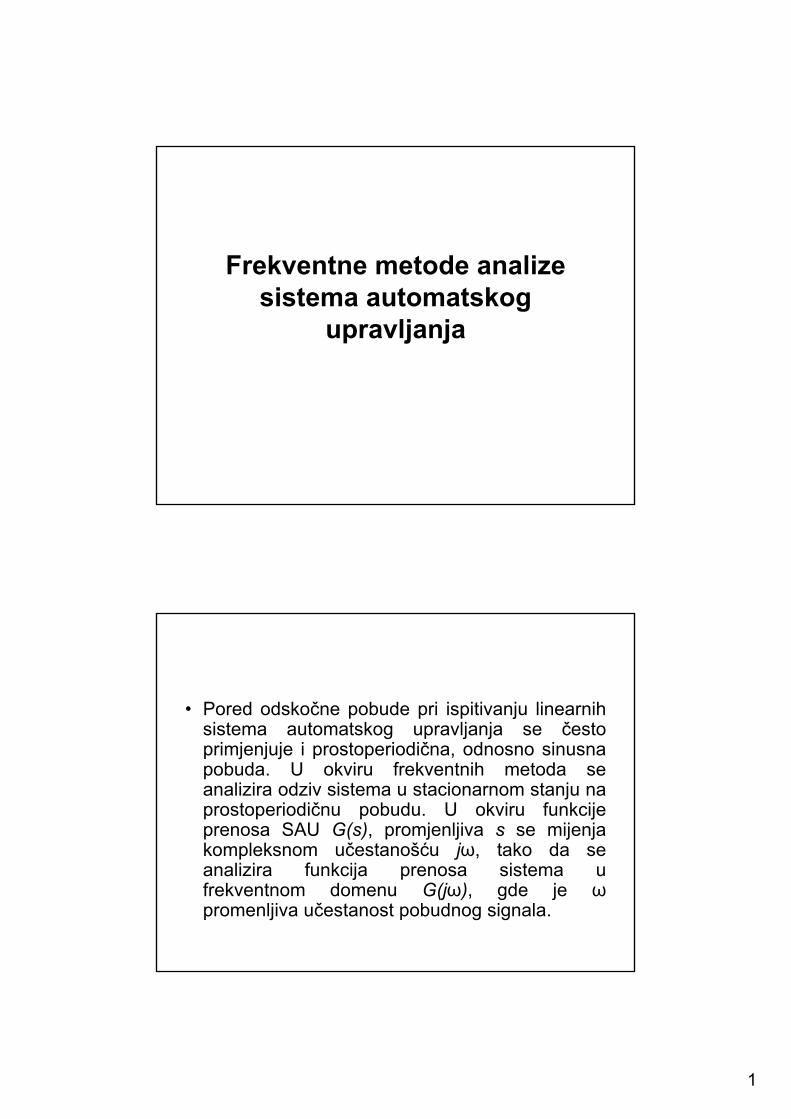
Frekventna karakteristika SAU
• G(jω) se, kao i bilo koji drugi kompleksanbroj, može predstaviti u eksponencijalnomobliku:
3
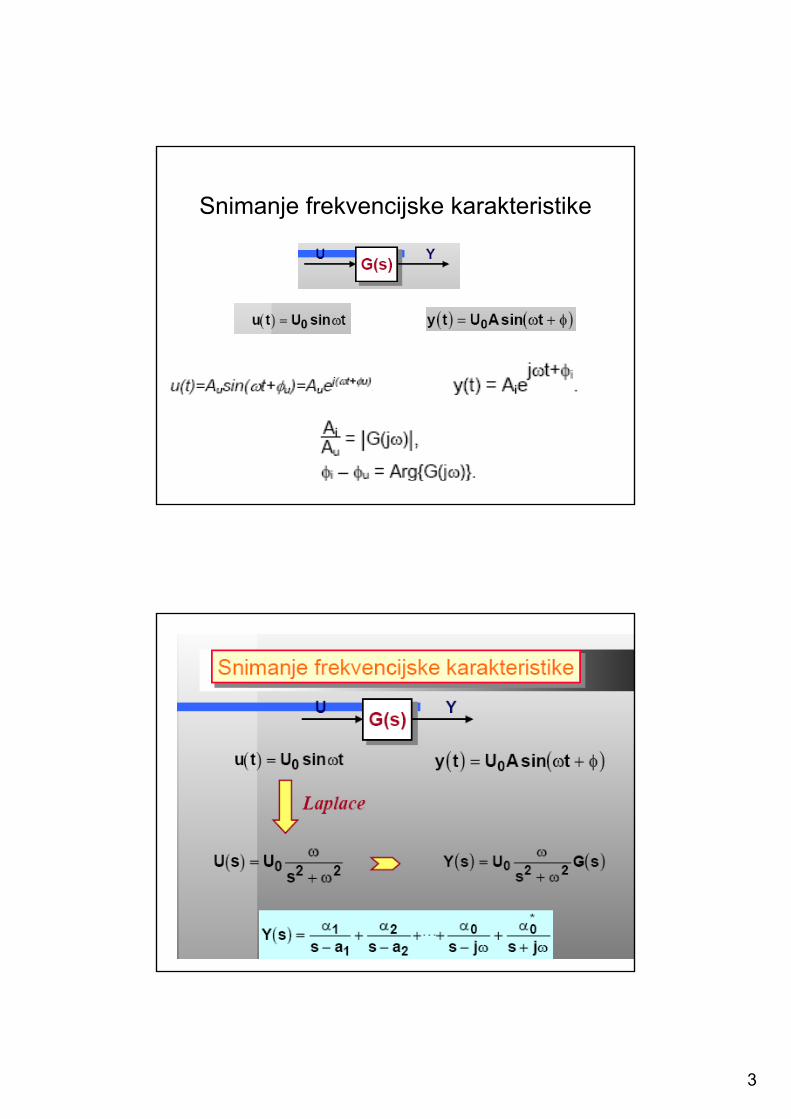
Snimanje frekvencijske karakteristike
4
5
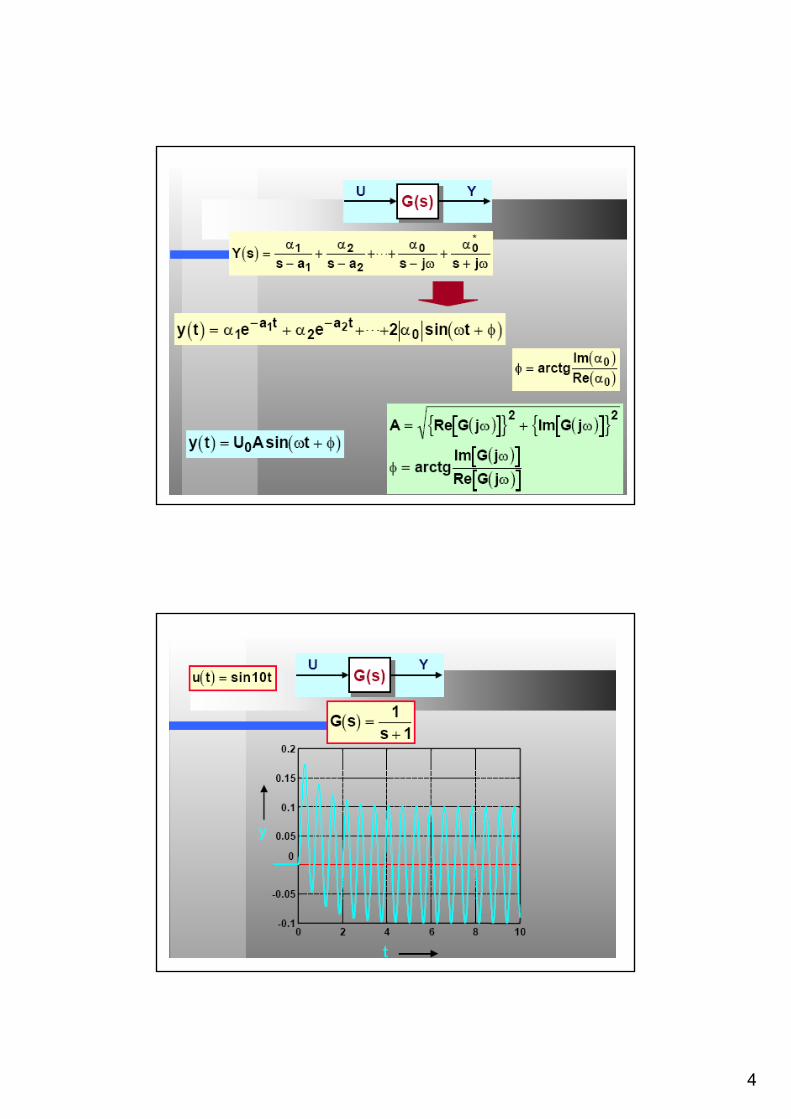
• Prethodni izrazi pokazuju da linearan sistempobuđen prostoperiodičnom pobudom, u stacionarnom stanju daje prostperiodičan odziviste učestanosti kao pobudni signal, ali sapromenjenom amplitudom i faznim pomerajem. Odnos amplituda ulaznog i izlaznog signala je jednak modulu funkcije prenosa sistema zarazmatranu učestanost ω, a fazni pomerajizlaznog u odnosu na ulazni signal je jednakargumentu funkcije prenosa za razmatranuučestanost ω.
• Za različite ω će pojačanje i fazni pomerajsignala pri prolasku kroz sistem bitirazličito, odnosno za različite ω ćevrednosti |G(jω)| i Arg{G(jω)} biti različite. Promena G(jω) pri promjeni ω od -∞ do ∞se može predstaviti grafički, i ta kriva se naziva amplitudno fazno frekventnakarakteristika (ili samo frekventnakarakteristika, AFFK) sistema*.
6
• Frekventna karakteristika sistema se crta u kompleksnoj ravni promjenljive G(jω). Jedannačin je da se za nekoliko vrijednosti ω naintervalu [0,∞) sračuna vrijednost Re i Im dijelaG(jω) ili |G(jω)| i Arg{G(jω)}, te tačke se unesu u koordinatni sistem na čijoj se apscisi nanosivrijednost za Re{G(jω)} a na ordinati zaIm{G(jω)}, tačke se spoje, kriva se orijentiše u smjeru porasta frekvencije ω i dobija se traženafrekventna karakteristika. Ovaj način se rijetkoprimjenjuje jer je nepraktičan (potrebno je sračunavanje vrijednosti kompleksne funkcije u većem broju tačaka) i postoji realna šansa da se neke važne (karakteristične) tačke izostave (kaošto su presjeci sa Re i Im osom), a upotrebnavrijednost precizno nacrtanog dijagrama nijeznačajno veća od približne skice.
• Iz navedenih razloga se najčešće AFFK sistemasamo skicira i to na taj način da se odredepočetak i kraj krive (G(jω) za ω=0 i ω→∞) i tačke presjeka krive sa Re i Im osom, spajanjemdobijenih tačaka u smjeru porasta frekvencije ω, dobija se skica AFFK koja nosi dovoljnu količinuinformacija za njenu najčešću primjenu, a to je analiza stabilnosti sistema. Valja napomenuti, šta u stvari AFFK predstavlja fizički? Svakatačka na AFFK odgovara tačno jednoj frekvencijiω sa intervala [0,∞). Udaljenost te tačke odkoordinatnog početka jeste |G(jω)|, to jest odnosamplituda izlaznog i ulaznog signala. Ugao kojizaklapa vektor povučen iz koordinatnog početkau tu tačku sa pozitivnim smerom Re ose jesteArg{G(jω)}, to jest fazni pomeraj izlaznog u odnosu na ulazni signal.
7
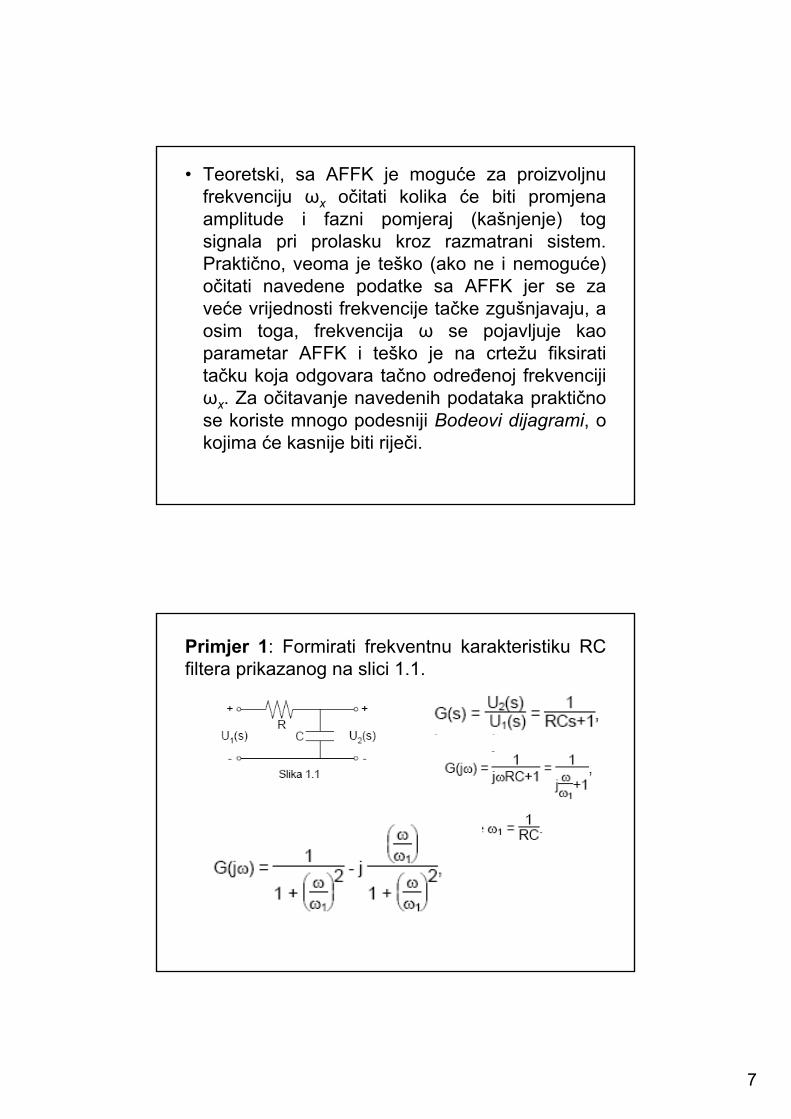
• Teoretski, sa AFFK je moguće za proizvoljnufrekvenciju ωx očitati kolika će biti promjenaamplitude i fazni pomjeraj (kašnjenje) tog signala pri prolasku kroz razmatrani sistem. Praktično, veoma je teško (ako ne i nemoguće) očitati navedene podatke sa AFFK jer se zaveće vrijednosti frekvencije tačke zgušnjavaju, a osim toga, frekvencija ω se pojavljuje kaoparametar AFFK i teško je na crtežu fiksiratitačku koja odgovara tačno određenoj frekvencijiωx. Za očitavanje navedenih podataka praktičnose koriste mnogo podesniji Bodeovi dijagrami, o kojima će kasnije biti riječi.
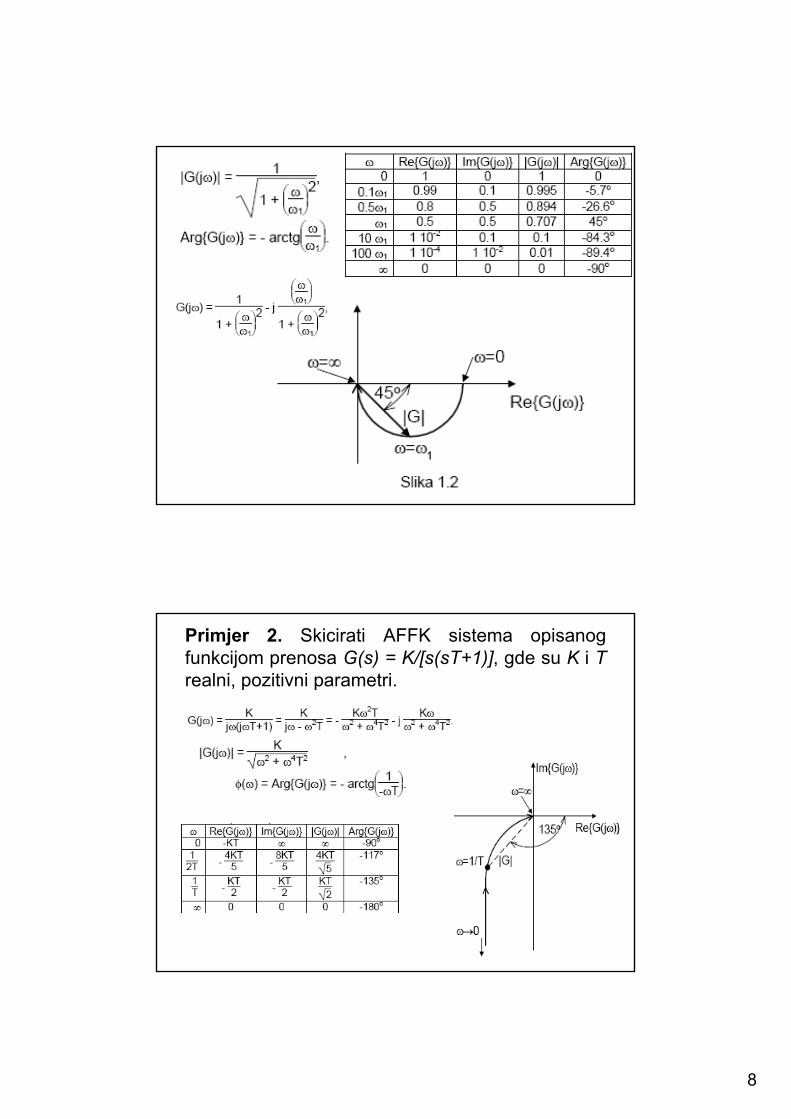
Primjer 1: Formirati frekventnu karakteristiku RC filtera prikazanog na slici 1.1.
8
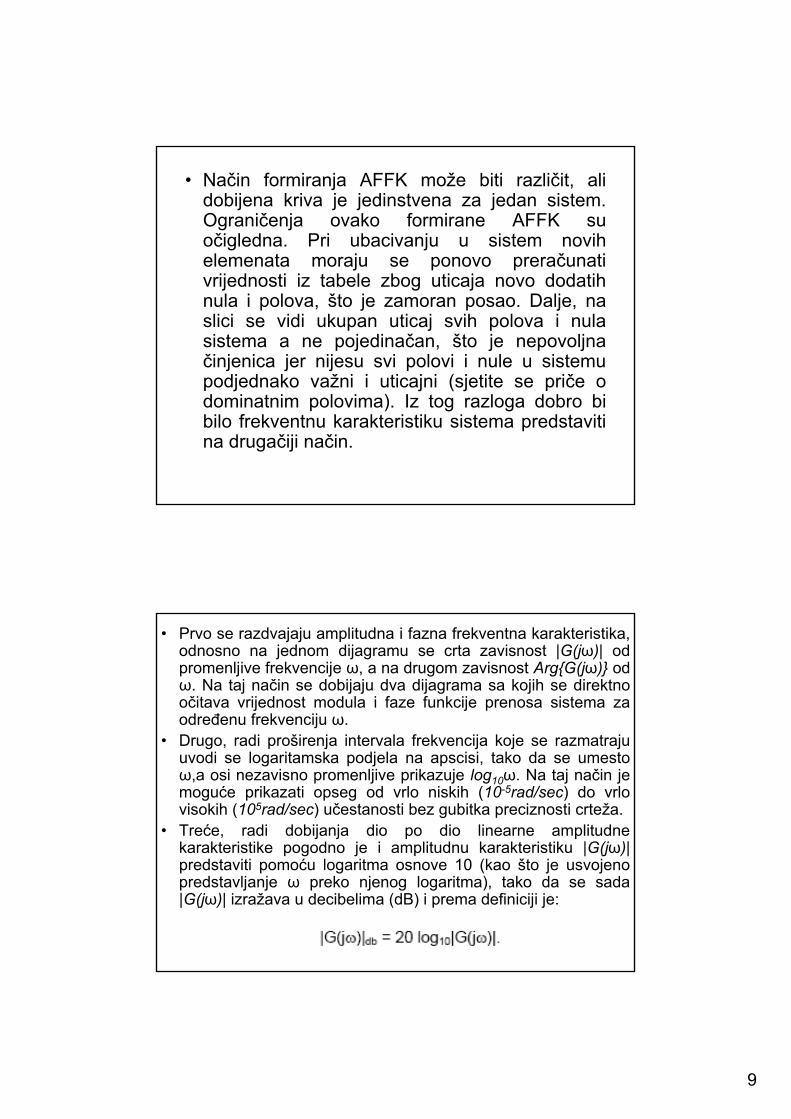
Primjer 2. Skicirati AFFK sistema opisanogfunkcijom prenosa G(s) = K/[s(sT+1)], gde su K i T realni, pozitivni parametri.
9
• Način formiranja AFFK može biti različit, alidobijena kriva je jedinstvena za jedan sistem. Ograničenja ovako formirane AFFK suočigledna. Pri ubacivanju u sistem novihelemenata moraju se ponovo preračunativrijednosti iz tabele zbog uticaja novo dodatihnula i polova, što je zamoran posao. Dalje, naslici se vidi ukupan uticaj svih polova i nulasistema a ne pojedinačan, što je nepovoljnačinjenica jer nijesu svi polovi i nule u sistemupodjednako važni i uticajni (sjetite se priče o dominatnim polovima). Iz tog razloga dobro bi bilo frekventnu karakteristiku sistema predstavitina drugačiji način.
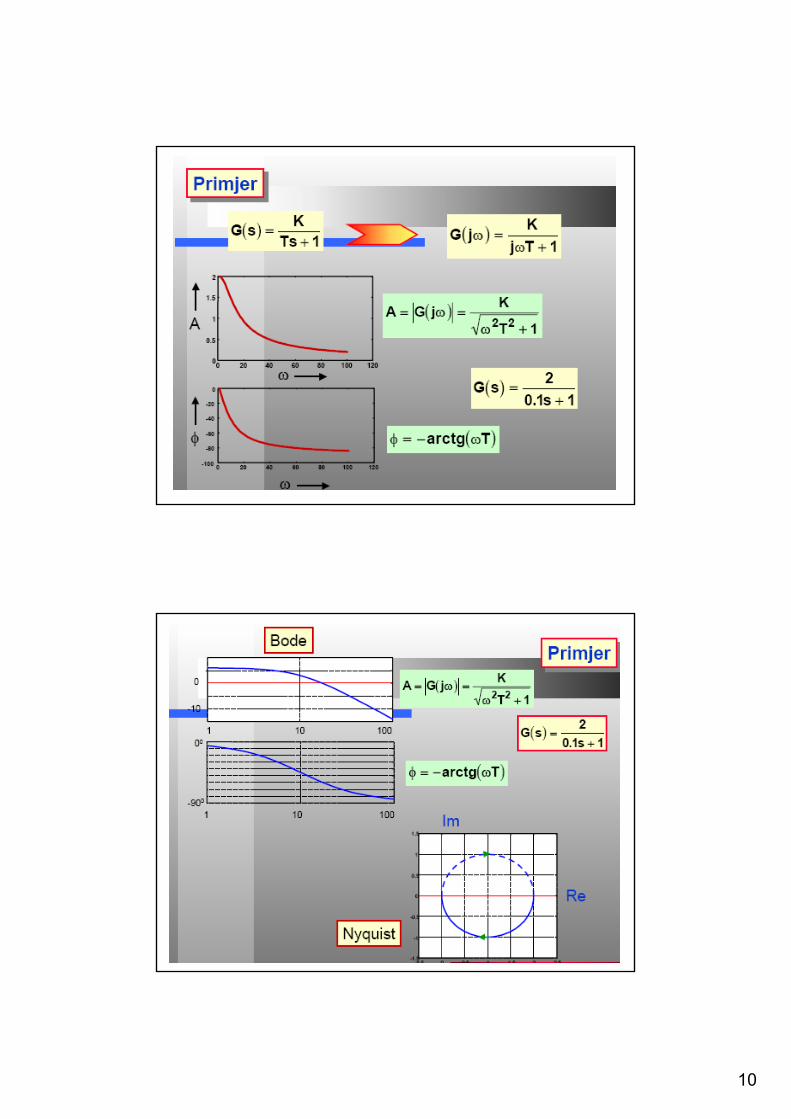
• Prvo se razdvajaju amplitudna i fazna frekventna karakteristika, odnosno na jednom dijagramu se crta zavisnost |G(jω)| odpromenljive frekvencije ω, a na drugom zavisnost Arg{G(jω)} odω. Na taj način se dobijaju dva dijagrama sa kojih se direktnoočitava vrijednost modula i faze funkcije prenosa sistema zaodređenu frekvenciju ω.
• Drugo, radi proširenja intervala frekvencija koje se razmatrajuuvodi se logaritamska podjela na apscisi, tako da se umestoω,a osi nezavisno promenljive prikazuje log10ω. Na taj način je moguće prikazati opseg od vrlo niskih (10-5rad/sec) do vrlovisokih (105rad/sec) učestanosti bez gubitka preciznosti crteža.
• Treće, radi dobijanja dio po dio linearne amplitudnekarakteristike pogodno je i amplitudnu karakteristiku |G(jω)| predstaviti pomoću logaritma osnove 10 (kao što je usvojenopredstavljanje ω preko njenog logaritma), tako da se sada|G(jω)| izražava u decibelima (dB) i prema definiciji je:
10

11
• Ako se frekventna karakteristika sistema formira na gore objašnjen način dobijaju se dva grafikona koji se nazivaju Bodeovi dijagrami. Njihov praktični značaj i primjenljivost je veoma velika, a način formiranja se vidiiz sledećeg primjera.
• Primjer 3. Formirati Bodeove dijagrame za RC filter izprimjera 1.
• Funkcija prenosa sistema, u frekventnom domenu, je:
• gde je T=RC (vremenska konstanta sistema). Moduo i argument G(jω) su:
Ako se |G(jω)| izrazi u decibelima, izraz postaje:
Iz poslednjeg izraza se vidi da je za male frekvencije ω<<1/T (ωT<<1):
odnosno da je za velike frekvencije ω>>1/T (ωT>>1):
a da je za ω=1/T (ωT=1):
12
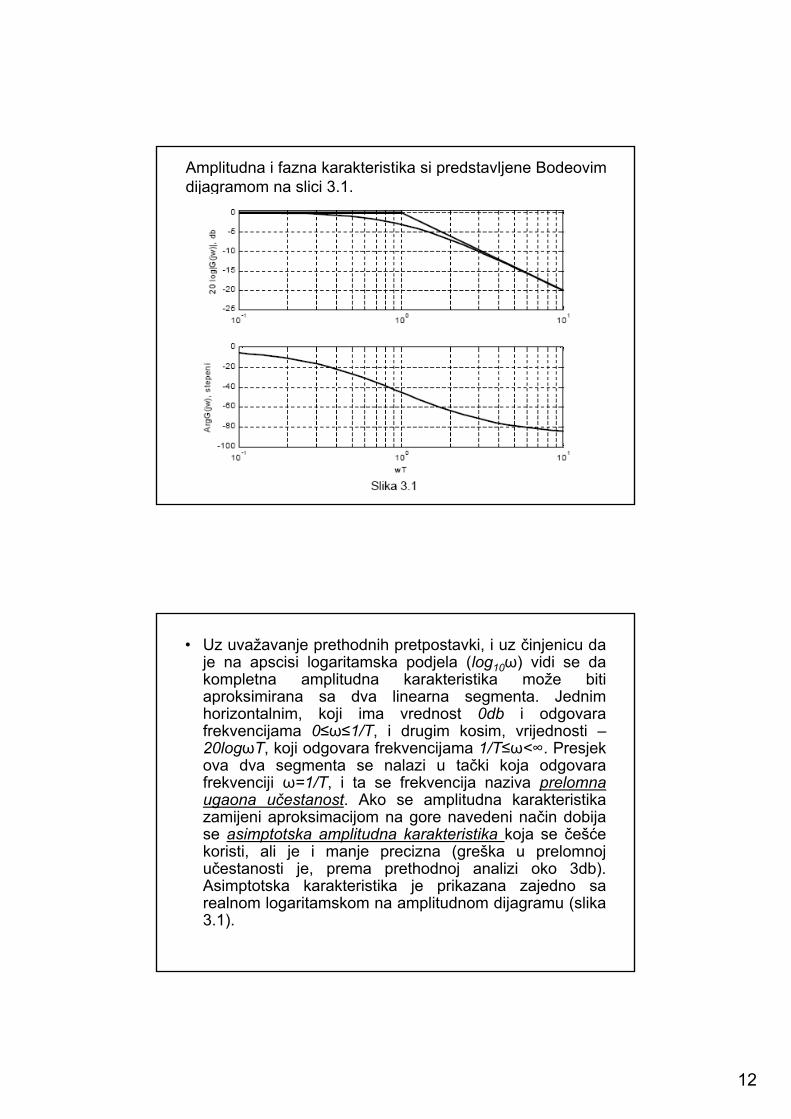
Amplitudna i fazna karakteristika si predstavljene Bodeovimdijagramom na slici 3.1.
• Uz uvažavanje prethodnih pretpostavki, i uz činjenicu daje na apscisi logaritamska podjela (log10ω) vidi se dakompletna amplitudna karakteristika može bitiaproksimirana sa dva linearna segmenta. Jednimhorizontalnim, koji ima vrednost 0db i odgovarafrekvencijama 0≤ω≤1/T, i drugim kosim, vrijednosti –20logωT, koji odgovara frekvencijama 1/T≤ω<∞. Presjekova dva segmenta se nalazi u tački koja odgovarafrekvenciji ω=1/T, i ta se frekvencija naziva prelomnaugaona učestanost. Ako se amplitudna karakteristikazamijeni aproksimacijom na gore navedeni način dobijase asimptotska amplitudna karakteristika koja se češćekoristi, ali je i manje precizna (greška u prelomnojučestanosti je, prema prethodnoj analizi oko 3db). Asimptotska karakteristika je prikazana zajedno sarealnom logaritamskom na amplitudnom dijagramu (slika3.1).
13
Koliki je nagib "kosog" dijela asimptotske amplitudne karakteristike? Posmatra se |G(jω)|db na frekvencijama ω1 i ω2, koje su veće od 1/T. Može se napisati:
Ako je frekvencija ω1 deset puta veća od ω2 (ω2=10ω1) one tada čine dekadu, a izprethodnog izraza slijedi:
odnosno, ako frekvencija ω poraste deset puta, amplitudna karakteristika opadneza 20dB, pa je nagib tog dijela karakteristika –20dB/dekadi. U literaturi se susrećejoš i pojam oktave. Oktavu čine frekvencije koje se nalaze na intervalu između ω1 i ω2 , gde je ω2=2ω1. Ako se u prvi izraz unesu granične vrijednosti oktave dobija se:
pa je nagib kosog dijela karakteristike je približno –6db/oktavi. Naravno, vidi se da je nagib –20db/dekadi isto što i –6db/oktavi.
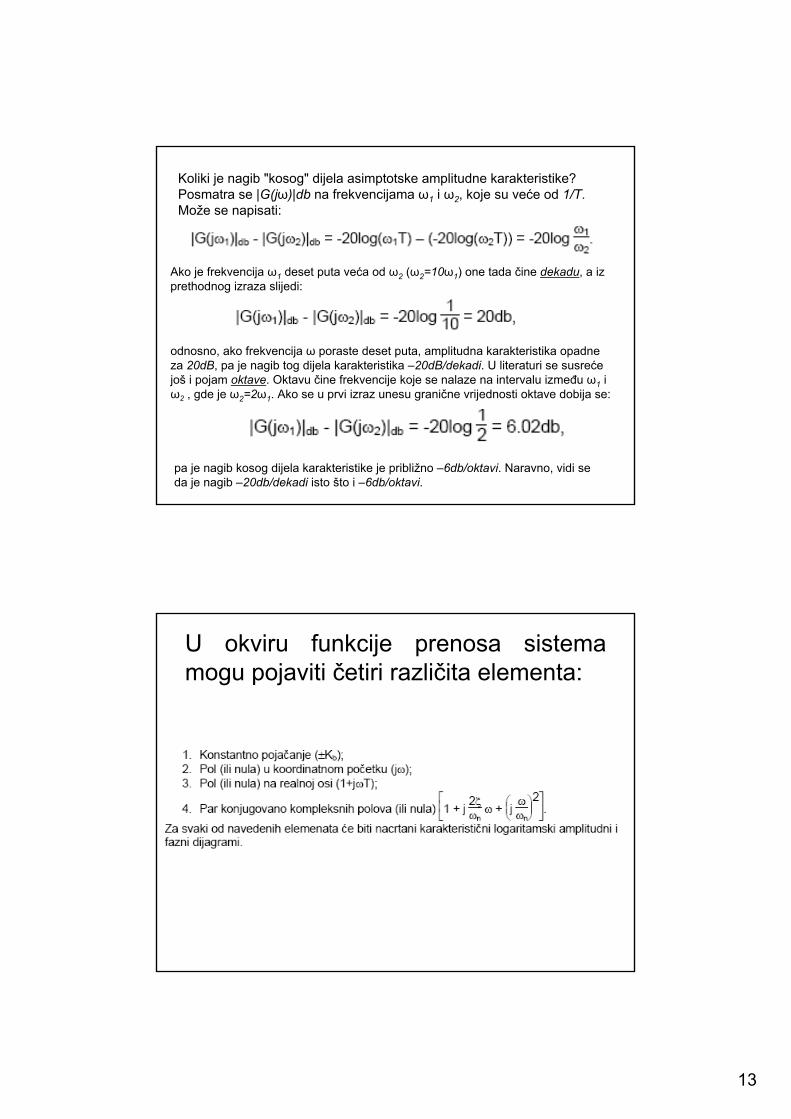
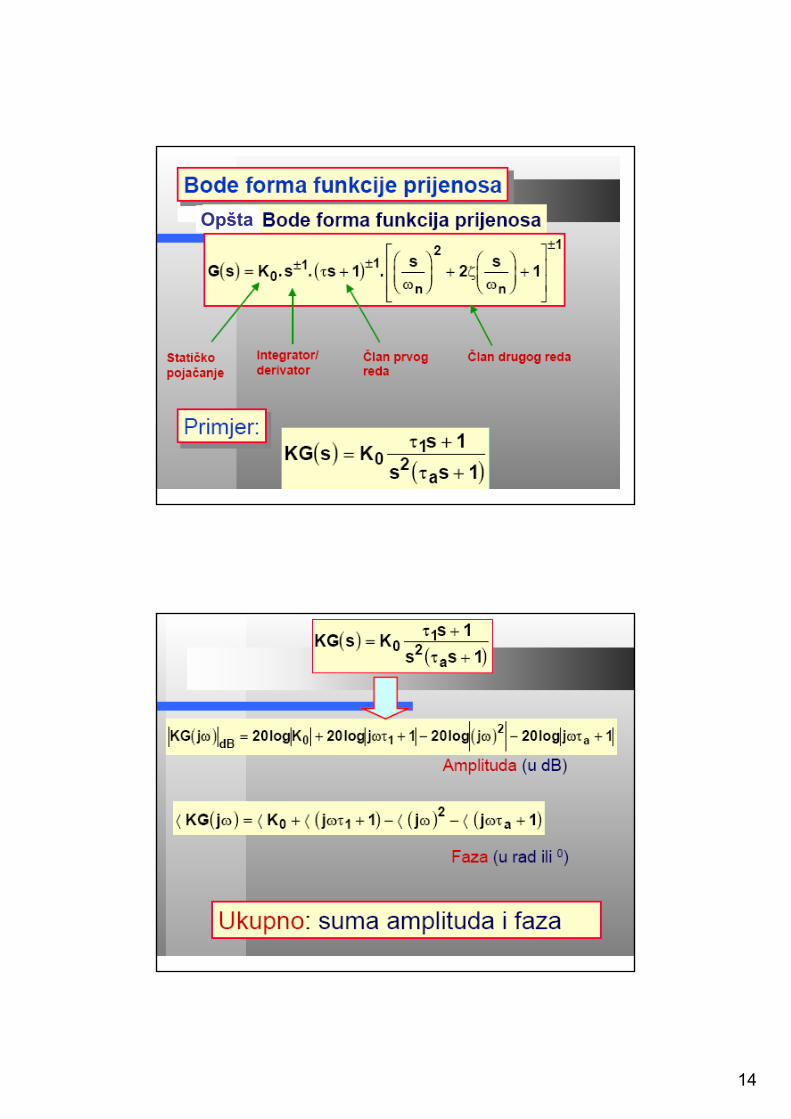
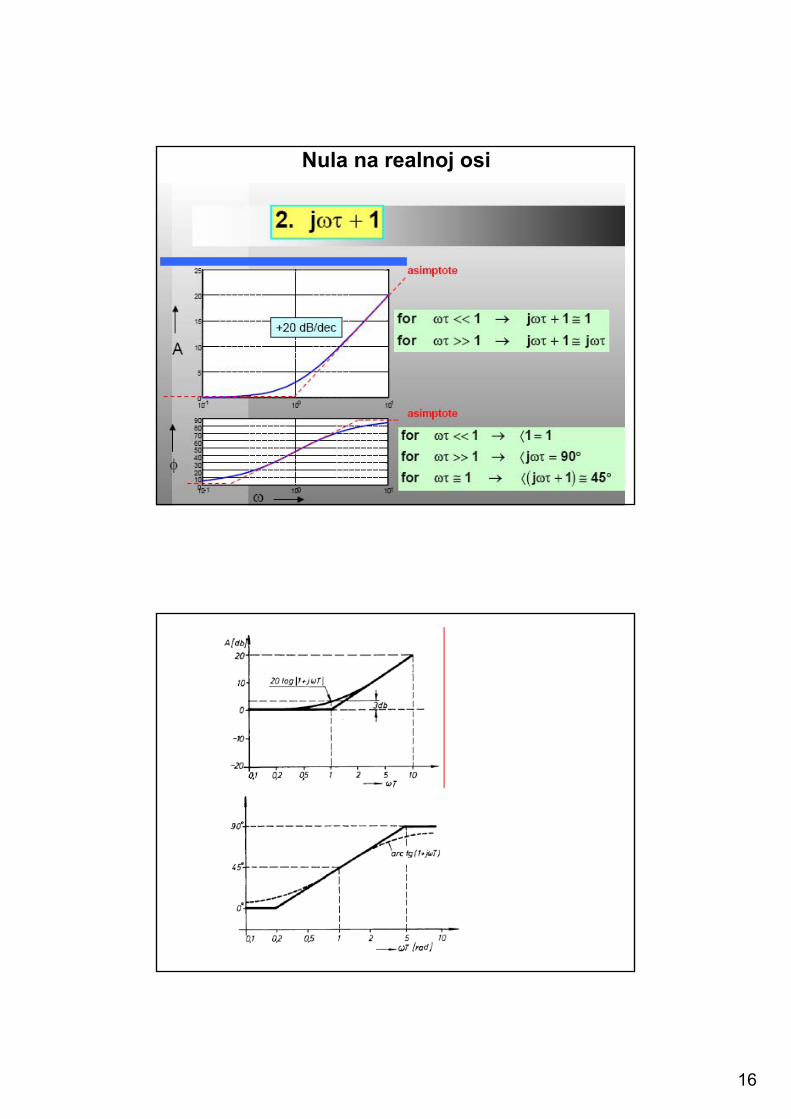
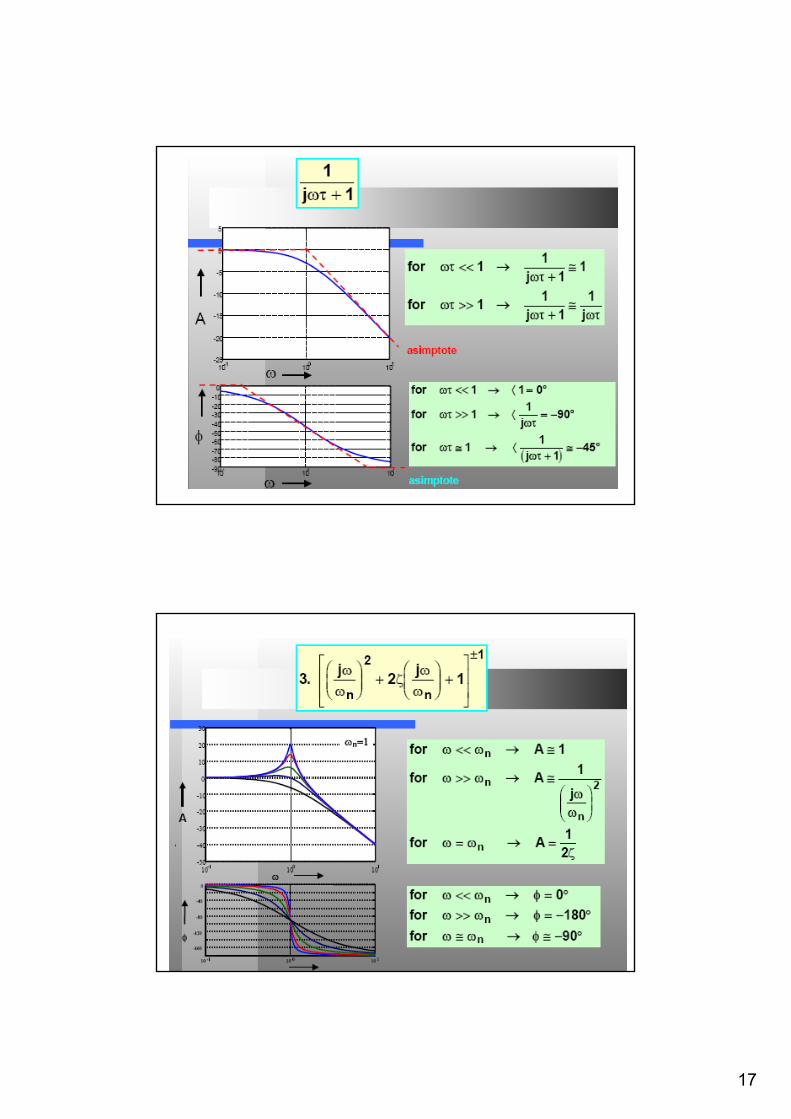
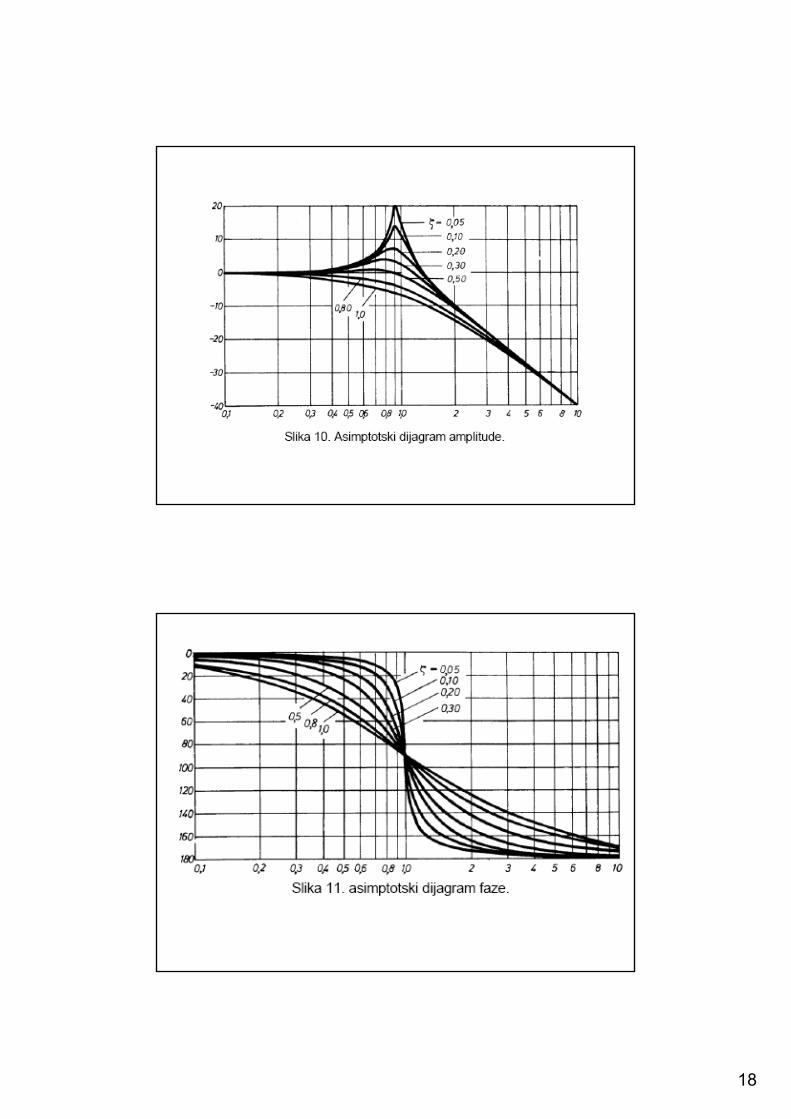
U okviru funkcije prenosa sistemamogu pojaviti četiri različita elementa:
14
Opšta
15
Pol ili nula u koordinatnom početku
16
Nula na realnoj osi
17
18
19
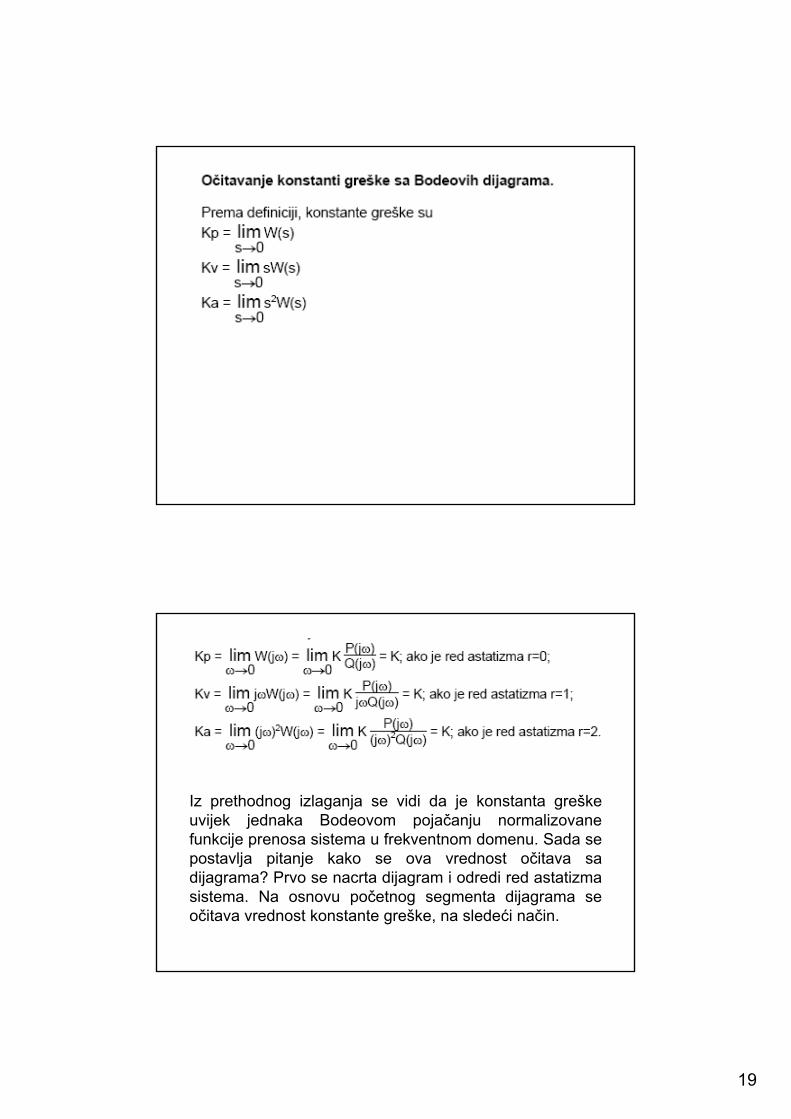
Iz prethodnog izlaganja se vidi da je konstanta greškeuvijek jednaka Bodeovom pojačanju normalizovanefunkcije prenosa sistema u frekventnom domenu. Sada se postavlja pitanje kako se ova vrednost očitava sadijagrama? Prvo se nacrta dijagram i odredi red astatizmasistema. Na osnovu početnog segmenta dijagrama se očitava vrednost konstante greške, na sledeći način.
20
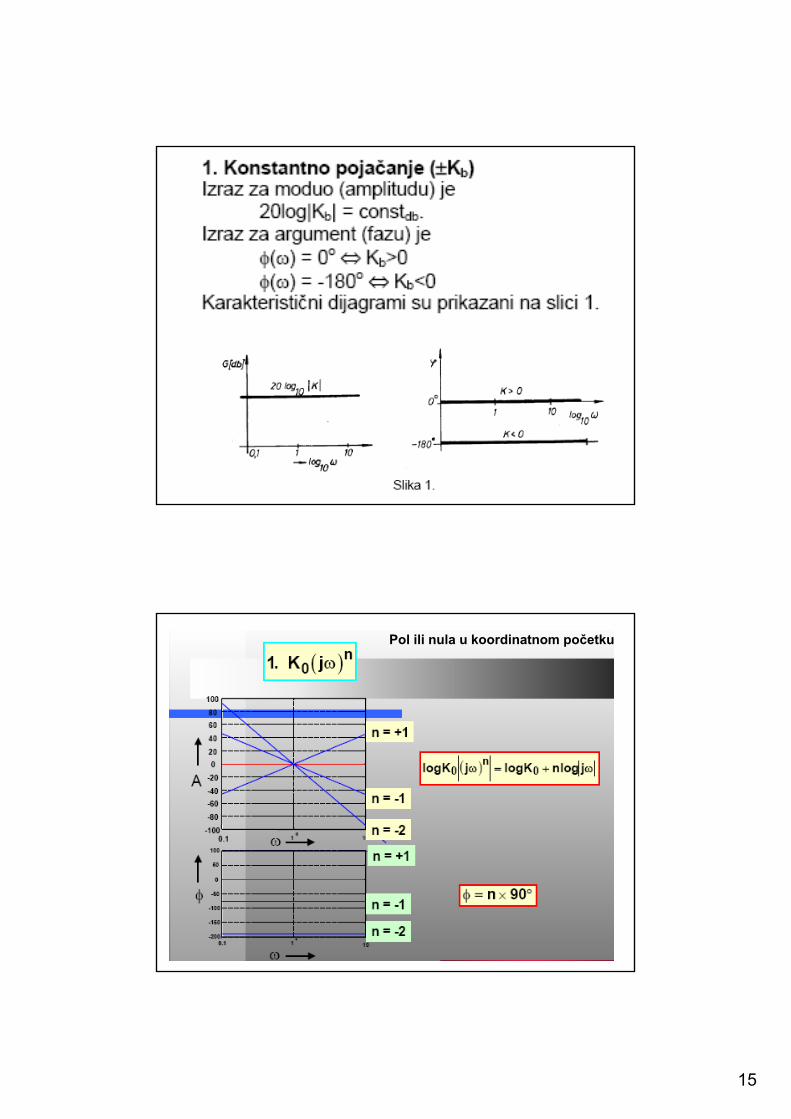
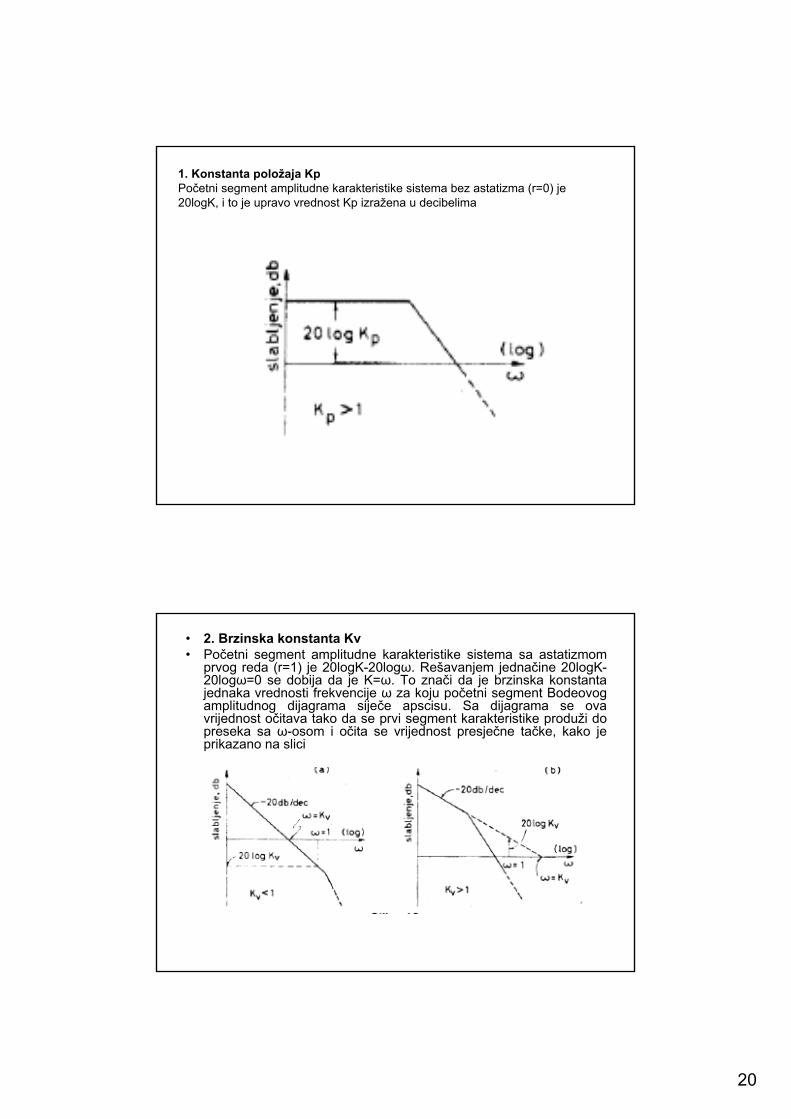
1. Konstanta položaja KpPočetni segment amplitudne karakteristike sistema bez astatizma (r=0) je 20logK, i to je upravo vrednost Kp izražena u decibelima
• 2. Brzinska konstanta Kv• Početni segment amplitudne karakteristike sistema sa astatizmom
prvog reda (r=1) je 20logK-20logω. Rešavanjem jednačine 20logK-20logω=0 se dobija da je K=ω. To znači da je brzinska konstantajednaka vrednosti frekvencije ω za koju početni segment Bodeovogamplitudnog dijagrama siječe apscisu. Sa dijagrama se ova vrijednost očitava tako da se prvi segment karakteristike produži do preseka sa ω-osom i očita se vrijednost presječne tačke, kako je prikazano na slici
21
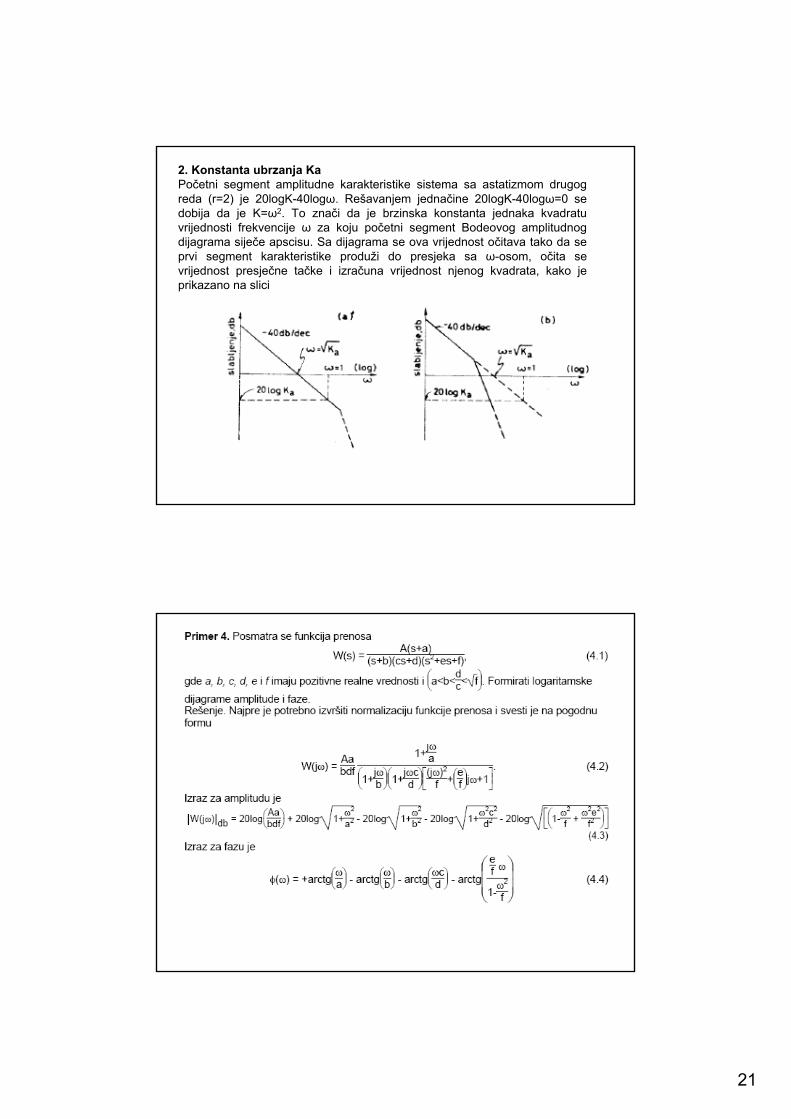
2. Konstanta ubrzanja Ka Početni segment amplitudne karakteristike sistema sa astatizmom drugogreda (r=2) je 20logK-40logω. Rešavanjem jednačine 20logK-40logω=0 se dobija da je K=ω2. To znači da je brzinska konstanta jednaka kvadratuvrijednosti frekvencije ω za koju početni segment Bodeovog amplitudnogdijagrama siječe apscisu. Sa dijagrama se ova vrijednost očitava tako da se prvi segment karakteristike produži do presjeka sa ω-osom, očita se vrijednost presječne tačke i izračuna vrijednost njenog kvadrata, kako je prikazano na slici
22
23
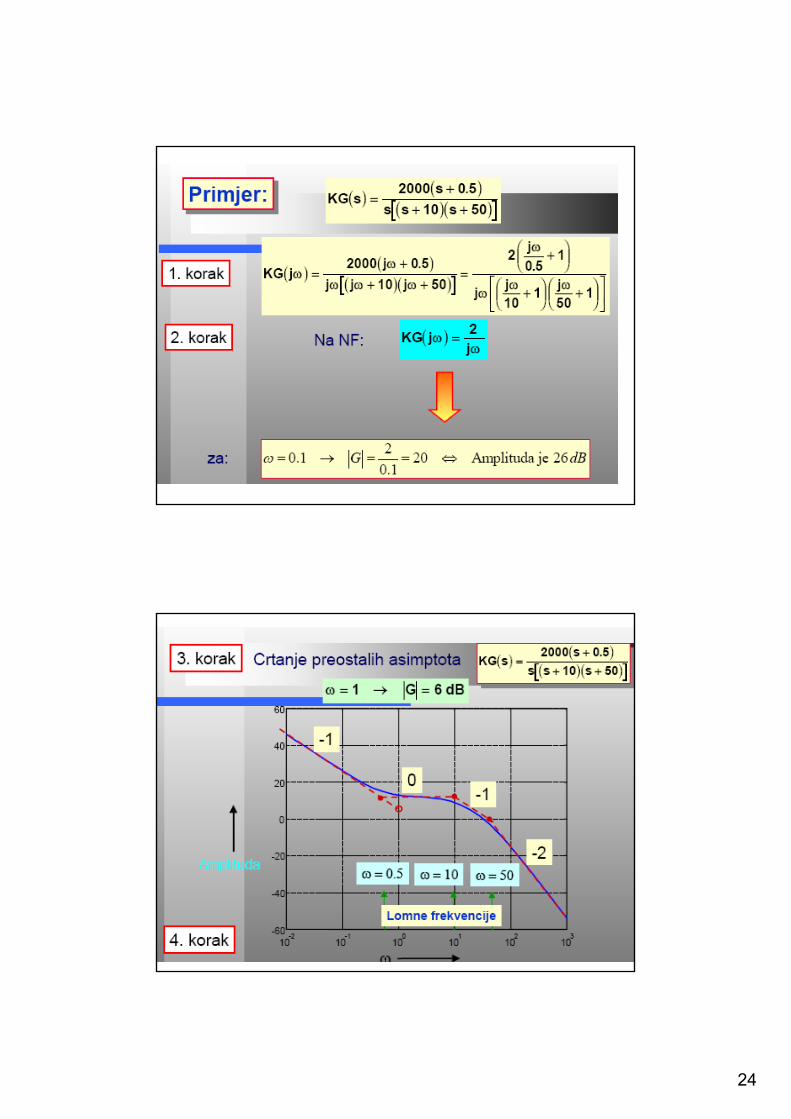
24
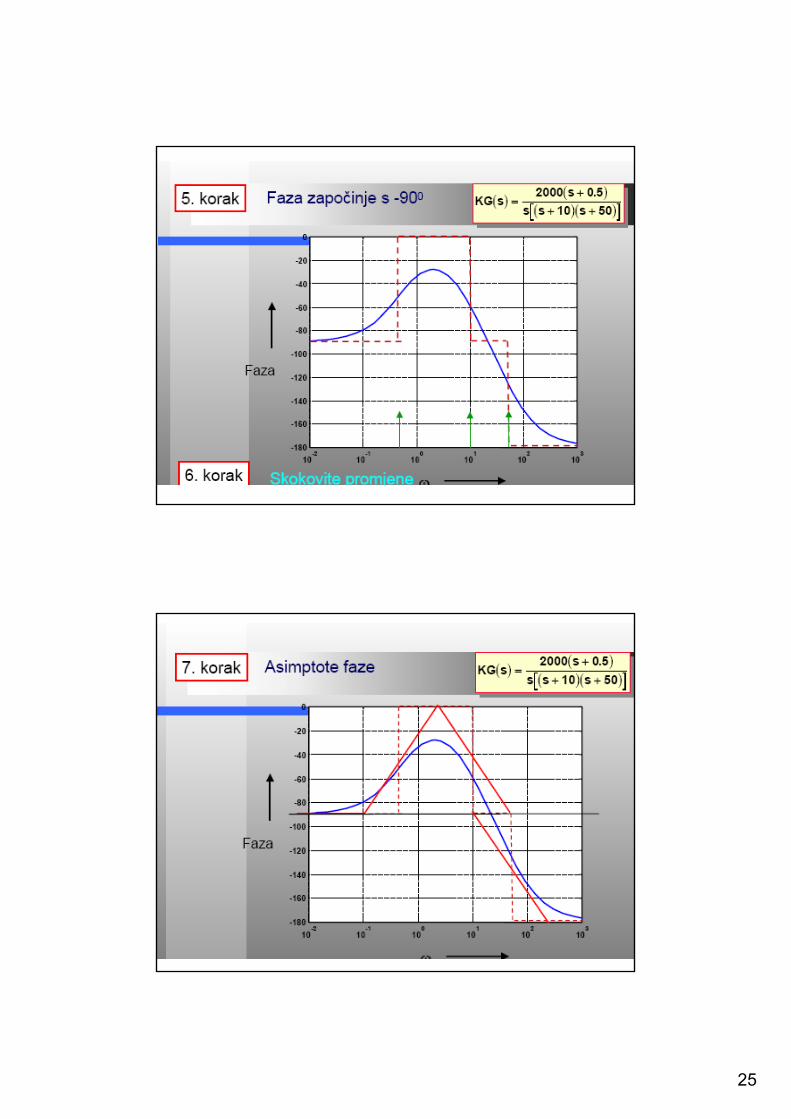
25
26
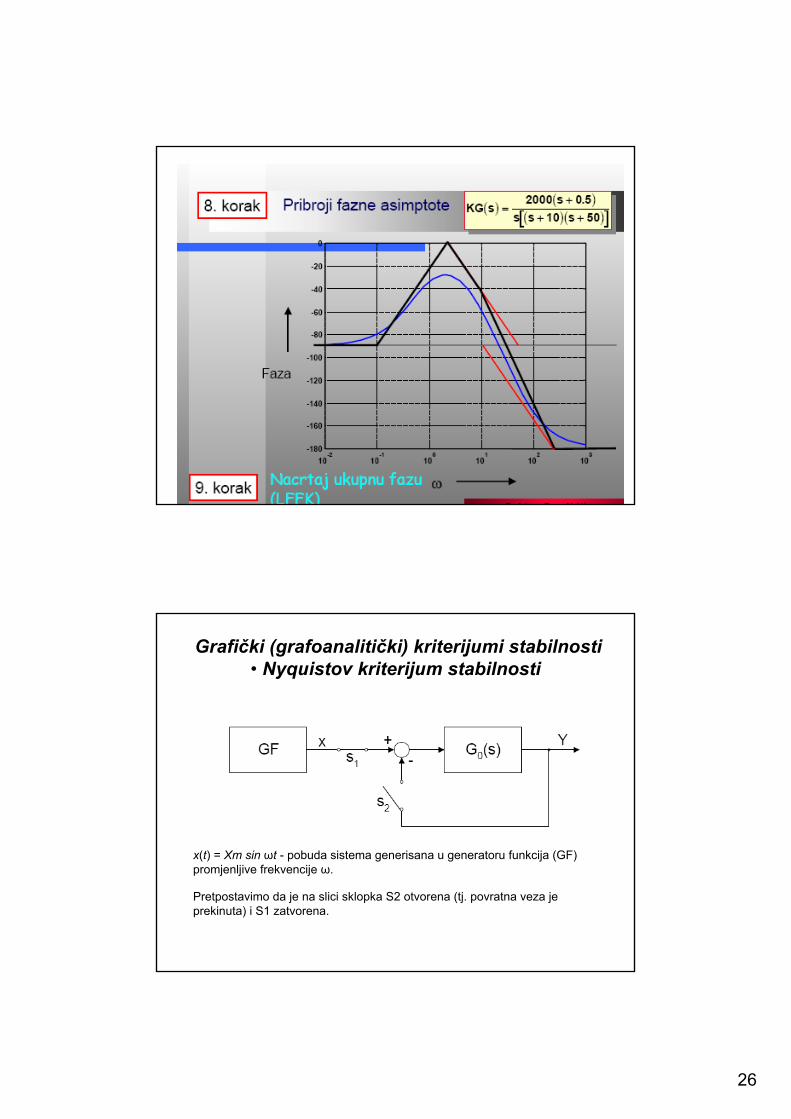
Grafički (grafoanalitički) kriterijumi stabilnosti• Nyquistov kriterijum stabilnosti
x(t) = Xm sin ωt - pobuda sistema generisana u generatoru funkcija (GF) promjenljive frekvencije ω.
Pretpostavimo da je na slici sklopka S2 otvorena (tj. povratna veza je prekinuta) i S1 zatvorena.
27
Ako elementi sistema ne bi unosili vremenska kašnjenja(fazno zaostajanje), onda bi izlazni signal y(t) bio u fazi s ulaznim signalom x(t).
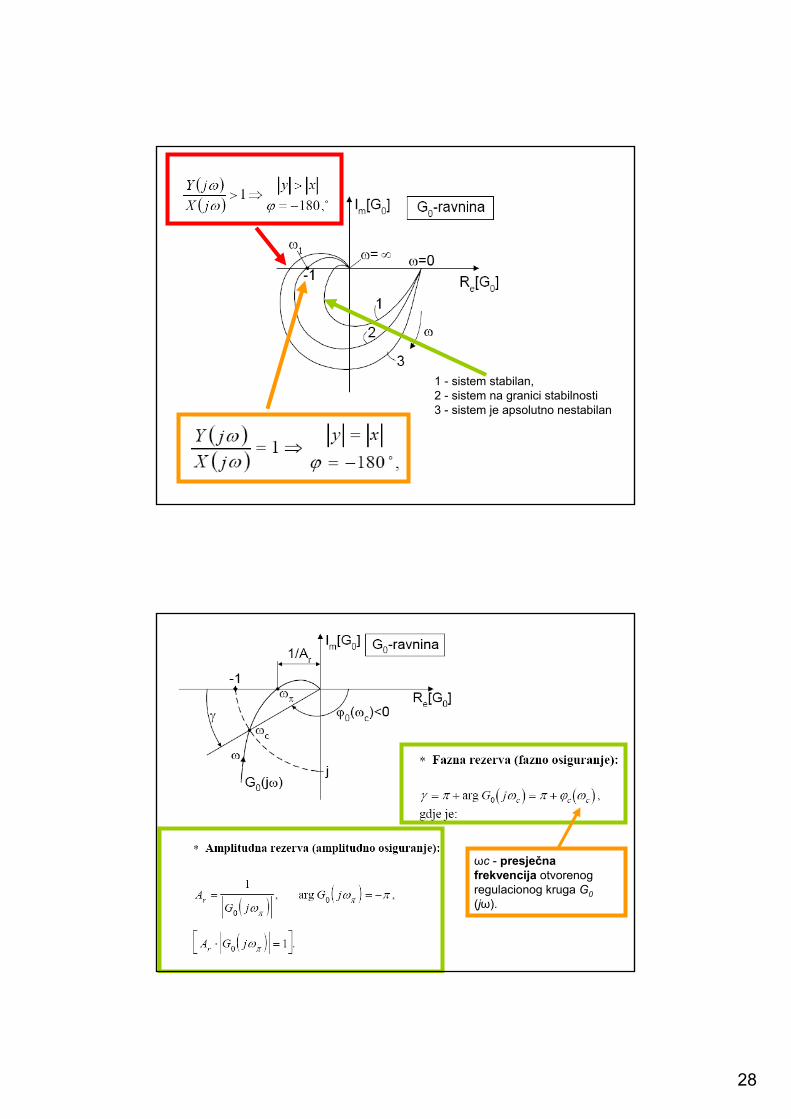
U realnom sistemu izlazni signal y(t) fazno zaostaje zaulaznim signalom x(t) s porastom frekvencije ω. Kod nekefrekvencije (ω = ω1) izlazni signal može fazno zaostajati za180°, što znači da su x(t) i y(t) u protivfazi. Pretpostavimoda je pri toj frekvenciji amplituda izlaznog signala Ymjednaka amplitudi ulaznog signala Xm.
Ako istovremeno isključimo ulazni signal x(t) i uključimosignal povratne veze y(t), signal povratne vezenadomjestit će ulazni signal. Sistem podržava oscilacije(samooscilacije); Sistem se nalazi na granici stabilnosti.
• Ako je uz iste uslove Ko > 1, sistem je apsolutno nestabilan, amplitude oscilacija bi se povećavale teoretski do beskonačnosti.
• Za Ko < 1 sistem je stabilan.• Stabilnost sistema određena je isključivo
parametrima sistema; stabilnost ne zavisiod pobude sistema.
28
1 - sistem stabilan,2 - sistem na granici stabilnosti3 - sistem je apsolutno nestabilan
ωc - presječnafrekvencija otvorenogregulacionog kruga G0(jω).
29
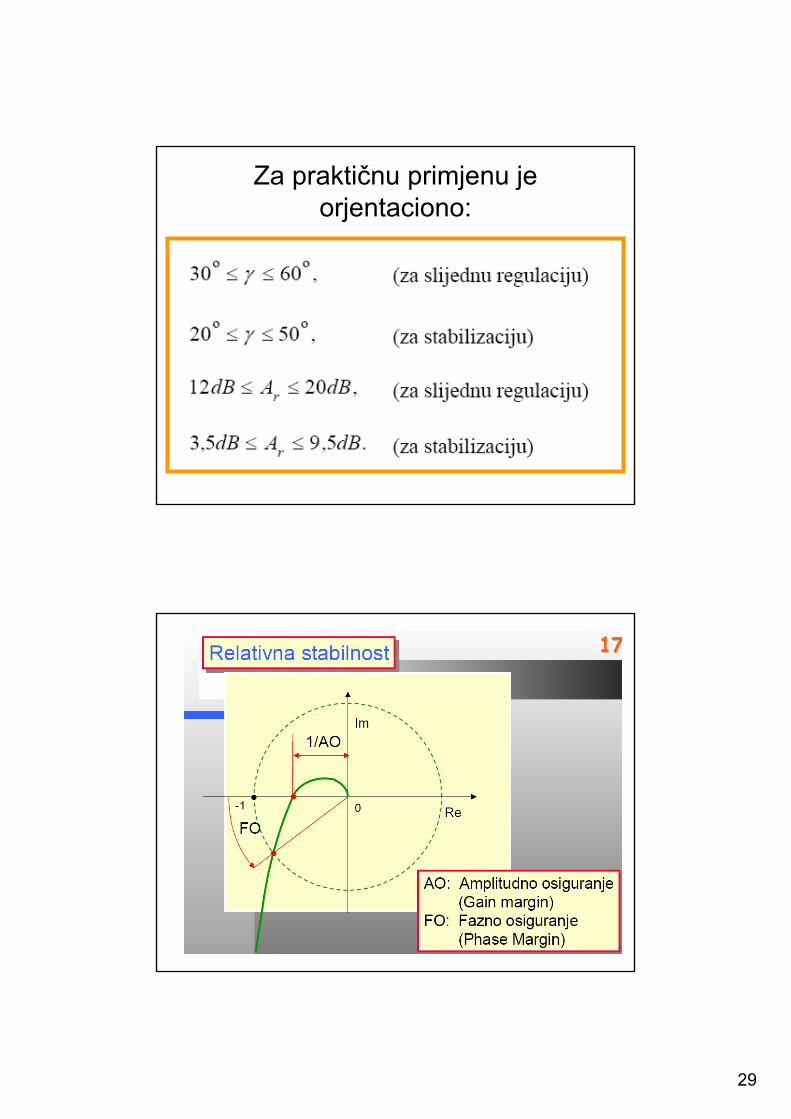
Za praktičnu primjenu je orjentaciono:
30
31
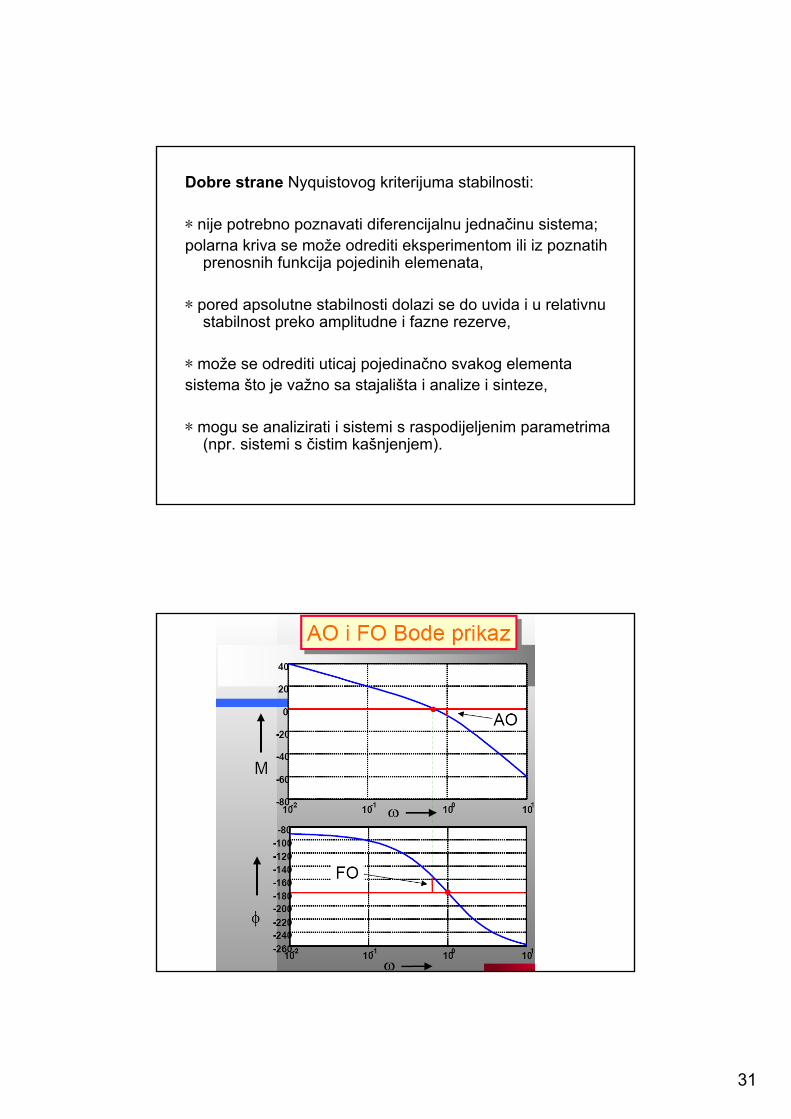
Dobre strane Nyquistovog kriterijuma stabilnosti:
∗ nije potrebno poznavati diferencijalnu jednačinu sistema;polarna kriva se može odrediti eksperimentom ili iz poznatih
prenosnih funkcija pojedinih elemenata,
∗ pored apsolutne stabilnosti dolazi se do uvida i u relativnustabilnost preko amplitudne i fazne rezerve,
∗ može se odrediti uticaj pojedinačno svakog elementasistema što je važno sa stajališta i analize i sinteze,
∗ mogu se analizirati i sistemi s raspodijeljenim parametrima(npr. sistemi s čistim kašnjenjem).
32
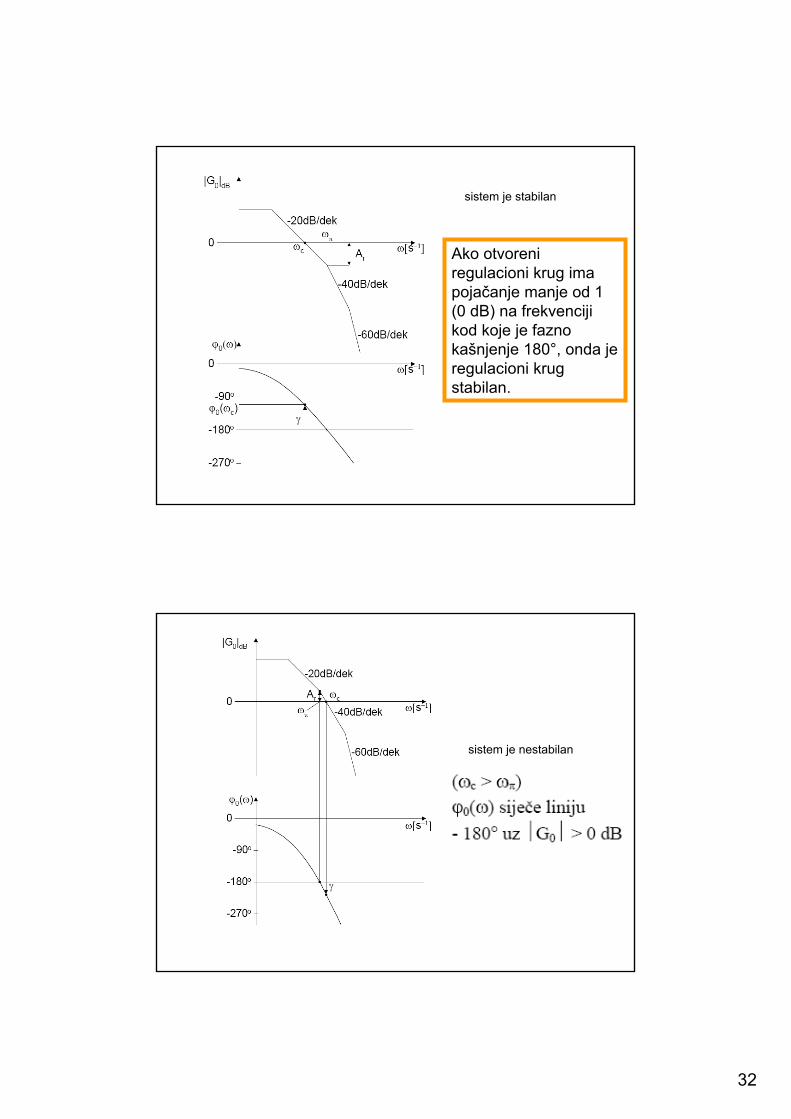
sistem je stabilan
Ako otvoreniregulacioni krug imapojačanje manje od 1 (0 dB) na frekvencijikod koje je faznokašnjenje 180°, onda jeregulacioni krugstabilan.
sistem je nestabilan
33
Gruba procjena stabilnosti sistema:sistem je vjerojatno nestabilan ako �G0�dB siječefrekvencijsku osu pod nagibom - 40 dB/dek.
Bodeov dijagram veoma je prikladan za analizu i sintezusistema upravljanja:∗ vrlo je jasan uticaj parametara sistema na stabilnostsistema;∗ relativno je jednostavno povezati frekvencijskekarakteristike otvorenog sistema s vremenskim ponašanjem
zatvorenog sistema upravljanja.
Zaključak
• Za razliku od algebarskih postupaka (Routh, Hurwitz) frekvencijski postupak analizestabilnosti omogućava analizu relativnestabilnosti, tj. daje odgovor na pitanje koliko je sistem daleko od granice stabilnosti (A.O.- pretek pojačanja i F.O.- pretek faze)
• Frekvencijski postupci omogućuju analizuuslovno stabilnih SAU.
• Projektovanje korekcijskih sklopova (regulatora) je u frekvencijskm području (osobito u Bode prikazu) veoma pregledno.
Recommended