-
8/17/2019 Geodesie Didier Bouteloup Chap6
1/17
CHAPITRE VI : REALISATION DE RESEAUX GEODESIQUES
BIDIMENSIONNELS
Cours de Géodésie
Chapitre 6
REALISATION DE RESEAUXGEODESIQUES BI-DIMENSIONNELS
Version 2.0 20/10/2002
Didier BOUTELOUPCellule pédagogique et de recherche en
astro-géodésie
[email protected]
(33) 01 64 15 31 37
-
8/17/2019 Geodesie Didier Bouteloup Chap6
2/17
COURS D ' INTRODUCTION À LA GÉODÉSIE
CHAPITRE 6
REALISATION DES RESEAUX GEODESIQUES BIDIMENSIONNELS
1 I
ntroduction____________________________________________________________1
2 I nf luence de la déviation de la verticale sur les mesur es
angulair es _______________1
2.1 Introduction
__________________________________________________________ 1
2.2 Formulation générale
___________________________________________________22.2.a Déviation
de la verticale
________________________________________________________2
2.2.b Corrections des mesures
angulaires________________________________________________4
2.3 Application aux mesures de triangulation terrestre
_____________________________72.3.a Corrections aux distances
zénithales _______________________________________________7
2.3.b Corrections aux angles
azimutaux_________________________________________________7
2.3.c Corrections aux angles
horizontaux________________________________________________7
3 Triangles
géodésiques____________________________________________________7
3.1 Approximation des sections normales
_______________________________________ 7
3.2 Représentation des triangles géodésiques en projection
conforme __________________ 9
3.3 Réduction des
distances_________________________________________________10
4 Réal isation des réseaux géodésiques
bidimensionnels__________________________13
4.1 Principe
d'élaboration__________________________________________________13
4.2 Référentiels et systèmes géodésiques
_______________________________________14
-
8/17/2019 Geodesie Didier Bouteloup Chap6
3/17
CHAPITRE VI : REALISATION DE RESEAUX GEODESIQUES
BIDIMENSIONNELS
Didier BOUTELOUP / ENSG / 2002 VI-1
1 Introduction
Avant le lancement des premiers satellites artificiels de la
Terre dans les années 1960,les seules techniques utilisables pour
l'élaboration des réseaux géodésiques étaient lessuivantes :§ l'ast
r onomie de posit ion : elle fournit la longitude et la
latitude géographique aλ et
aϕ en un point ainsi que l'azimut d'une direction
a Az . C'est une méthode depositionnement absolu,
§ les mesures terrestres d'angles (t r iangulat ion ) et de
distances (t r ilat ér at ion ). Cesobservations permettent de
déterminer des différences de coordonnées, c'est-à-dire de
déterminer les coordonnées d'un deuxième point connaissant celles
d'unpremier. Il s'agit de techniques de positionnement relatif.
Les mesures terrestres d'angles et de distances peuvent
théoriquement être traitésdans l'espace (calcul tridimensionnel).
Mais, historiquement, les calculs ont quasimenttoujours été menés
de manière bidimensionnelle. Les stations et les points de
viséessont alors projetés orthogonalement sur l'ellipsoïde de
référence. Après différentescorrections que nous allons étudier,
les observations fournissent des longueurs de lignesgéodésiques
e D , des différences d'azimuts Az ∆ et des
distances zénithales Dz. Detelles traitements ne permettent en
aucun cas de connaître la hauteur h d'un point par
rapport à l'ellipsoïde ; on ne réalise ainsi que des réseaux sur
une surface, c'est-à-direbidimensionnels.
En fait, un réseau bidimensionnel est toujours couplé avec un
réseau d'altitudes. Maisl'altitude H d'un point n'est pas une
grandeur géométrique. Rappelons que l'altitude H est un
paramètre homogène à une distance qui traduit l'éloignement par
rapport augéoïde, et que, en un point, h et H peuvent
différer de quelques dizaines de mètres.
2 Influence de la déviation de la verticale sur les mesures
angulaires
2.1 Introduction
Pratiquement, les angles observés sont des différences
d'azimuts (angles horizontaux)et des distances
zénithales (angles verticaux). Pour pouvoir utiliser le
modèleellipsoïdique, il faut ramener ces mesures à des angles
relatifs à la normale à l'ellipsoïde.
-
8/17/2019 Geodesie Didier Bouteloup Chap6
4/17
COURS D ' INTRODUCTION À LA GÉODÉSIE
Didier BOUTELOUP / ENSG / 2002 VI-2
2.2 Formulation générale
2.2.a Déviation de la verticale
En un lieu M, on appelle verticale la direction du
vecteur-accélération depesanteur terrestre g . La verticale
est dirigée par le vecteur unitaire vr
défini
par gvg
= −r
r
r
Autrement dit, la verticale est "la direction du fil à plomb".
Le plan passant parM et orthogonal à v est le plan
horizontal. On appelle zénith la direction définiepar + v
r
et nadir la direction opposée de -vr
.
On appelle déviation de la verticale l'angle θ entre
nr
et vr
. On a cos n vθ = ⋅r r
.
Numériquement, en France métropolitaine, ona toujours 15θ
′′< , et, dans le monde, 100θ ′′< .
Si n v≠r r
, définissons un vecteur normal Tαuur
orthogonal à nr
et coplanaire avec nr
et vr
. Tαuur
est donc un vecteur du plan tangent et peuts'écrire:
p mT sin T cos Tα α α= +uur uur uur
vr
s'exprime alors:
v cos n sin Tαθ θ= +r r uur
Il est clair que θ étant un angle infiniment
petit, cos 1sin θθ θ≈ ≈ et les composantes devr
dans le
repère local sont
LR
sin
v cos
1
θ α
θ α
r
, où cosθ α et
sinθ α sont des angles infiniment petits.
ellipsoïdeg
v
n θ
Fig. 1 : Vecteurs g et n
T m T p
T α
n
v
ηξ
θ
α
Fig. 2 : Décomposition de la
déviation de la verticale
-
8/17/2019 Geodesie Didier Bouteloup Chap6
5/17
CHAPITRE VI : REALISATION DE RESEAUX GEODESIQUES
BIDIMENSIONNELS
Didier BOUTELOUP / ENSG / 2002 VI-3
On retiendra:v
1 R g
L
η
ξ
r
η et ξ sont les composantes de
la déviation de la verticale,respecti-vement dans lesdirections
Est-Ouest et Nord-Sud.
On désigne pargL
R le repère local géodésique en 1 1 p
m( ; T ,T ,n) M uur uur r
et par
( )L 1 1 2a ; T , T , vR M = uur uur
r
le repère local astronomique en 1 .
• ( )1 2; T , v M uur r
est un repère orthonormé du plan mér id ien ast r
onomique , c'est
à dire du plan contenant v et parallèle à l'axe des
pôles,
• 1Tuur
est tel que ( )1 2T , T , vuur uur r
soit une base orthonormée directe.
Par définition de La R , a priori,
( ) ( )a g
1 2L L
R R R R ξ η− +≠ .
Cherchons une relation entre lescoordonnées astronomiques ( )a
a,λ ϕ ,
les coordonnées géographiques ( )g g,λ ϕ
et les composantes ( ),η ξ de ladéviation de la
verticale.
n v T m
T p
T 1T2
Ogϕ
gλ
aλ
ϕa
θ
M
Fig. 3 : Repère local astronomique;
coordonnées astronomiques
Les composantes de vr
sont connues dans R et dansg
LR :
a a
a a
a
cos cos
v sin cos
sinR
λ ϕ
λ ϕ
ϕ
r
et
gL
v
1 R
η
ξ
r
Or la matrice R de passage de R àgL
R a déjà été étudiée :
-
8/17/2019 Geodesie Didier Bouteloup Chap6
6/17
COURS D ' INTRODUCTION À LA GÉODÉSIE
Didier BOUTELOUP / ENSG / 2002 VI-4
g g
g g g g g
g g g g g
sin cos 0
sin cos sin sin cos
cos cos cos sin sin
R
λ λ
ϕ λ ϕ λ ϕ
ϕ λ ϕ λ ϕ
−
= − −
D'où on tire l'identité matricielle:
g g a a
g g g g g a a
g g g g g a
sin cos 0 cos cos
sin cos sin sin cos sin cos
1 cos cos cos sin sin sin
η λ λ λ ϕ
ξ ϕ λ ϕ λ ϕ λ ϕ
ϕ λ ϕ λ ϕ ϕ
− = − −
( )
( )
( )
a a g
a g a g a g
a g a g a g
cos sin (1)
sin cos cos sin cos (2)
1 cos cos cos sin sin (3)
η ϕ λ λ
ξ ϕ ϕ ϕ ϕ λ λ
ϕ ϕ λ λ ϕ ϕ
= −
⇔ = − −
= − +
L'égalité (1) montre que a gλ λ− est de l'ordre de η,
c'est à dire un infinimentpetit de 1er ordre. Ainsi, au 1er ordre
près, on peut donc écrire
( )
( )
a g a g
a g
sin
cos 1
λ λ λ λ
λ λ
− = −
− = .
Les relations (1) et (2) s'écrivent donc:
( )
( )
a a g
a g a g a g
cos
sin cos cos sin 1 sin
η ϕ λ λ
ξ ϕ ϕ ϕ ϕ ϕ ϕ
= −
= − × = −
On en déduit que a gϕ ϕ− est aussi un infiniment petit de
1er ordre. Dans cesconditions:
( ) ( ) ( ) ( )a a g g a g g a g a gcos cos cos sin sinϕ λ λ ϕ ϕ
ϕ ϕ ϕ ϕ λ λ − = − − − −
( ) ( )( ) ( )g a g g a g a g g a gcos sin cosnéligeable
ϕ λ λ ϕ ϕ ϕ λ λ ϕ λ λ= − − − − = −14444244443
En définitive, on peut écrire: ( )a gcosη ϕ λ λ= −
a gξ ϕ ϕ= −
2.2.b Corrections des mesures angulaires
Si on note gaR la matrice de passage de LaR
à gLR , l'expression de LaR est :
( ) ( )ga 3 2 g 3 g 3 a 2 a 3
L Lg a
R R R R R R R 2 2 2 2
passage de à passage de àR R R R
π π π πϕ λ λ ϕ
+ + + − − − = − −
1444442444443 1444442444443
-
8/17/2019 Geodesie Didier Bouteloup Chap6
7/17
CHAPITRE VI : REALISATION DE RESEAUX GEODESIQUES
BIDIMENSIONNELS
Didier BOUTELOUP / ENSG / 2002 VI-5
De plus, si S désigne une station d'observations et
V un point de visée, nous utiliseronsles notations suivantes
:
§ a aet Dz Az représentent respectivement la
distance zénithale et l'azimut observés
de 1 vers 2 ,§ g get Dz Az représentent
respectivement la distance zénithale et l'azimut corrigés,
c'est à dire ramenés dansgL
R .
n v
T 2
T 1
Az a
Dz a
S
V
T p
T m
Dz g
A z g
S
V
Fig. 4 : Correction des mesures angulaires
Soit SVuSV
=uuur
r
uuur , les composantes de ur
sont connues dansg
L R et dans L a R :
g
g g
g g
gL
sin sin
u sin cos
cosR
Dz Az
Dz Az
Dz
r
et
a
a a
a a
aL
sin sin
u sin cos
cos R
Dz Az
Dz Az
Dz
r
et
g g a a
g
g g a a a
g a
sin sin sin sin
sin cos R sin cos
cos cos
Dz Az Dz Az
Dz Az Dz Az
Dz Dz
=
.
L'expression de gaR se développe comme il suit :
g g a a a a a
g
a g g g g g a a a a a
g g g g g a a
sin cos 0 sin sin cos cos cos
R sin cos sin sin cos cos sin sin cos sin
cos cos cos sin sin 0 cos sin
λ λ λ ϕ λ ϕ λ
ϕ λ ϕ λ ϕ λ ϕ λ ϕ λ
ϕ λ ϕ λ ϕ ϕ ϕ
− − − = − − −
( ) ( ) ( )
( ) ( )( )
( ) ( ) ( )
a g a a g a a g
g a a g g ag g
g a g a a g
g
a a g g a a gg a g
g a g a
cos sin sin cos sin
sin sin cos cos sinsin sin
cos cos sin cos cos
cos sin cos cos cos coscos sinsin cos sin sin
a
λ λ ϕ λ λ ϕ λ λ
λ ϕ ϕ λ λ ϕ ϕϕ λϕ ϕ ϕ ϕ λ λ
ϕ ϕ λ λ ϕ ϕ λ λϕ λ λϕ ϕ ϕ ϕ
− − − − −− + − −=
− − − − − + +
-
8/17/2019 Geodesie Didier Bouteloup Chap6
8/17
COURS D ' INTRODUCTION À LA GÉODÉSIE
Didier BOUTELOUP / ENSG / 2002 VI-6
g
a
1 tan
R tan 1
1
η ϕ η
η ϕ ξ
η ξ
− ⇔ = − −
On en déduit :
g g a a
g g a a
g a
sin sin 1 tan sin sin
sin cos tan 1 sin cos
cos 1 cos
Dz Az Dz Az
Dz Az Dz Az
Dz Dz
η ϕ η
η ϕ ξ
η ξ
− =
− −
g g a a a a a
g g a a a a a
g a a a a a
sin sin sin sin tan sin cos cos (1)
sin cos tan sin sin sin cos cos (2)
cos sin sin sin cos cos (3)
Dz Az Dz Az Dz Az Dz
Dz Az Dz Az Dz Az Dz
Dz Dz Az Dz Az Dz
η ϕ η
η ϕ ξ
η ξ
= − +
⇔ = + + = − − +
Écrivons la formule de Taylor au 1er ordre pour la fonction
cos au voisinage de a Dz :
( ) ( ) ( )g a g a a g a g acos cos sin Dz Dz Dz Dz Dz Dz
Dz Dz Dz ε= − − + − −
( )g ag a
avec lim 0 Dz Dz
Dz Dz ε→
− =
Et l'égalité (3) s'écrit :( )g a a a acos cos sin sin
cos Dz Dz Dz Az Az η ξ= − +
Par identification on en tire l'identité suivante au 1er ordre
près :g a a asin cos Dz Dz Az Az η ξ− = +
Il se démontre également que, au 1er ordre près, cette formule
peut s'écrire :
g a sin cos Dz Dz Az Az η ξ− = +
Pour obtenir la relation liant g aà Az Az , formons a
a(1) cos (2) sin Az Az ⋅ − ⋅ :
( )g g a a a a a asin sin tan sin cos cos cos sin Dz Az Az
Dz Dz Az Dz Az η ϕ η ξ− = − + −
Cette relation nous montre que ( )g asin Az Az − ,
et donc g a Az Az − est un infiniment petit
du 1er ordre. Le premier membre de l'égalité s'écrit donc :( ) (
) ( )g g a g a asin sin sin sin cos Dz Az Az Az Az Dz
Az Az η ξ − = − + +
( ) ( )( ) ( )a g a a g a a g asin cos sin cos sin
négligeable car du 2ème ordre
Dz Az Az Dz Az Az Az Az Dz Az Az η ξ= − + − + =
−14444444244444443
Et a a(1)cos (2)sin Az Az − se transforme ainsi
en :
( ) ( )a g a a a a asin tan sin cos cos sin Dz Az Az
Dz Dz Az Az η ϕ η ξ− = − + −
( )g a a a atan cot cos sin Az Az Dz Az Az η ϕ η ξ⇔ −
= − + −
-
8/17/2019 Geodesie Didier Bouteloup Chap6
9/17
CHAPITRE VI : REALISATION DE RESEAUX GEODESIQUES
BIDIMENSIONNELS
Didier BOUTELOUP / ENSG / 2002 VI-7
La démonstration serait simple à faire que, dans cette dernière
formule, au 1er ordreprès, acot Dz peut être
remplacé par gcot Dz , acos Az par
gcos Az et asin Az par
gsin Az . Nous retiendrons donc :
( )g a tan cot cos sin Az Az Dz Az Az η ϕ η ξ−
= − + −
ou encore :( ) ( )g a g asin cot cos sin Az Az Dz Az
Az ϕ λ λ η ξ− = − + −
2.3 Application aux mesures de triangulation terrestre
2.3.a Corrections aux distances zénithales
En ce qui concerne les distances zénithales a Dz , la
correction g a Dz Dz − est dedeuxième ordre par
rapport à la correction de réfraction, qui est très mal connue;
engénéral, on ne l'applique pas.
2.3.b Corrections aux angles azimutaux
Quant aux angles azimutaux a Az , les visées étant le
plus souvent proches del'horizontale, Dz est le plus souvent
proche de 2π et cot Dz est suffisamment petitpour
être négligé. La formule de correction, appelée f ormule de
Laplace , à appliquer estdonc :
formule de Laplace : ( )g a g asin Az Az
ϕ λ λ− = −
Cette formule indique la correction à apporter à une mesure
d'azimut astronomique.
2.3.c Corrections aux angles horizontauxL'angle horizontal entre
deux visées est une différence d'azimuts
2 1a a a Az Az Az ∆ = − .
La correction g a Az Az ∆ − ∆ vaut donc :
( ) ( )g g a ag a 2 1 2 1 Az Az Az Az Az Az ∆ −
∆ = − − −
( ) ( )2 2 2 1 1 1cot cos sin cot cos sin Dz Az Az Dz Az
Az η ξ η ξ= − − −
Tant que 1 Dz et 2 Dz sont
suffisamment proches de 2π , 1cot Dz et
2cot Dz sontnégligeables et il n'y a pas lieu de
corriger une différence d'azimuts.
Il faut garder à l'esprit que, si cot Dz n'est plus
négligeable, alors la formule de Laplacene peut pas être utilisée
et doit être remplacée par la formule générale de g a Az
Az − établie précédemment ; cela peut être le cas en
zone de montagne, ou lors de mesuresd'angles sur un ouvrage
architectural ou industriel.
3 Triangles géodésiques
3.1 Approximation des sections normales
Après correction de la déviation de la verticale, un tour
d'horizon fournit donc les
différences d'azimuts géodésiques g Az ∆ entre
les différents points de visées, c'est à
-
8/17/2019 Geodesie Didier Bouteloup Chap6
10/17
COURS D ' INTRODUCTION À LA GÉODÉSIE
Didier BOUTELOUP / ENSG / 2002 VI-8
dire les angles entre les différentes sections normales à
l'ellipsoïde à la station. Nousnoterons dans ce paragraphe
jiS la section normale en i passant
par j.
Soit M, P et Q les trois côtés d'un triangle
géodésique. À la station M, la différence des
deux visées vers P et Q est l'angle entre les deux
sections normales P
M S etQ
M S . À lastation P (respectivement Q), la
différence des deux visées vers M et Q (resp. M et
P)est l'angle entre les sections normales
M P S et
Q
P S (resp. M
QS et P
QS ). Ces six courbessont a priori toutes différentes. En
effet, si i j≠ , alors a priori j ii jS S ≠ .
Pratiquement, il se démontre que, pour un triangle de quelques
dizaines de km de côtésau maximum, la ligne géodésique passant par
i et j ( G
j
iΓ ) se situe toujours entre les deux
sections normales jiS eti
jS , et que la différence d'azimuts,i k
jS ∆ entre deux visées en
une station ( ,i k k i
j j jS S S ∆ = − ) peut être confondue, à4
10 gr
−
près au pire, avec ladifférence d'azimuts des géodésiques
,G G Gi k k i
j j j∆Γ = Γ − Γ .
Il est donc légitime de considérer que, à la précision des
observations près, les mesuresd'angles horizontaux entre stations
géodésiques forment des triangles sur l'ellipsoïdedont les côtés
sont des arcs de lignes géodésiques. Cette approximation est
appeléeapproximation des sections normales.
( jiΠ : plan normal à l'ellipsoïde en
i passant par j)
M
P
Q
M Q
Π
Π M P
Π M Q
Π M P
Π P Q
Π P Q
Fig. 5 : Observation d'un triangle géodésique
-
8/17/2019 Geodesie Didier Bouteloup Chap6
11/17
CHAPITRE VI : REALISATION DE RESEAUX GEODESIQUES
BIDIMENSIONNELS
Didier BOUTELOUP / ENSG / 2002 VI-9
S M
P
S M P
M
P GΓ
M
Fig. 6 : Sections normales et ligne géodésique entre deux
points
3.2 Représentation des triangles géodésiques en projection
conforme
Les calculs de triangulation ont le plus souvent été réalisés
non pas sur l'ellipsoïde(estimation des coordonnées géographiques
des sommets des triangles), mais plutôt en
représentation plane conforme (estimation des coordonnées en
projection). Dans ce cas,il faut réduire les triangles
géodésiques sur le plan de projection, c'est à dire établir
larelation entre un triangle géodésique et son image en
représentation :
§ la représentation étant conforme, un triangle infiniment petit
a ses angles conservéset ne subit qu'une homothétie de facteur
µ,
§ à l'échelle de la Terre, les triangles géodésiques de quelques
dizaines de km de côtésne peuvent pas être considérés infiniment
petits. Les lignes géodésiquesreprésentant les côtés du triangle ne
peuvent donc pas être assimilées à des droites
et les angles intérieurs ne sont ainsi pas conservés.On appelle
gisement, noté V, l'angle en projection entre l'axe des ordonnées
et la droitereliant deux points 1m et 2m .
Soit Gγ l'image de la ligne géodésique reliant les
points 1m et 2m . On notetraditionnellement dV l'angle
en 1m entre Gγ et la droite 1m 2m .Remarque :
l’image d’une géodésique tourne sa concavité vers l’isomètre
central de lareprésentation.
Az
dV
Nord
λ=λconst
1m
2m
Gγ
V
X=X const
Fig. 7 : Ligne géodésique en représentation
-
8/17/2019 Geodesie Didier Bouteloup Chap6
12/17
COURS D ' INTRODUCTION À LA GÉODÉSIE
Didier BOUTELOUP / ENSG / 2002 VI-10
Dans le cas particulier d'une représentation conique conforme de
Lambert :§ d Az V V γ = + − , où
γ représente la convergence du méridien,§ la correction
dV est donnée par la formule de Schols que nous
admettrons :§
( )1 3 0 1 31 3 0 0
1 1d sin2
radians sV Az
N β β
µ ρ−= × ×
avec :§ 0 (respectivement 0ρ et 0β ) représentent la
grande normale (resp. le rayon de
courbure du méridien ρ et la distance à l'équateur β)
calculés sur le parallèleautomécoïque,
§ s est la longueur de Gγ entre 1m et 2m
,§ 1 3µ (resp. 1 3 Az et 1 3β ) représentent
le module linéaire µ (resp. l'azimut de Gγ et
la fonction β) calculés en 1 3m , point situé sur Gγ
entre 1m et 2m à la distance 3 s
de 1m .§ Autre formulation approché :
1 3 0
1 3 0
sin sind sin
2 sinradians eV D Az
R
ϕ ϕ
ϕ
−= ⋅ ⋅
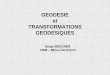
3.3 Réduction des distances
Au delà de quelques dizaines de mètres, les techniques de mesure
de distances utiliséesen géodésie sont de deux types :§ fil en
invar : l'utilité de cet instrument s'est beaucoup réduite depuis
la disponibilitédes distancemètres électroniques à partir des
années 1960. Cette technique
fournissait la distance euclidienne p D 1 entre
deux points de la surface terrestre. La
précision relative obtenue p p
D
D
δ était de l'ordre de -5 -610 à quelques 10 ,
§ distancemètre électronique : ces instruments utilisent la
propagation d'une ondeélectromagnétique dans l'atmosphère, que le
présent cours n'étudie pas en détail. Undistancemètre électronique
fournit donc le temps de parcours d'une onde entredeux points. À
partir de cette observation on peut obtenir la distance
euclidienne
p D entre deux points. La précision relative
est de l'ordre de6
10− .
Pour pouvoir se servir de la modélisation de la Terre par un
ellipsoïde, il fauttransformer les distances spatiales
p D en longueur sur l'ellipsoïde e D .
Les distances mesurées au fil invar ou au distancemètre étant
toujours inférieures à50 km environ, nous sommes autorisés, au
niveau millimétrique, à confondre la lignegéodésique avec son
cercle osculateur.
1. On l'appelle aussi de «distance selon la pente».
-
8/17/2019 Geodesie Didier Bouteloup Chap6
13/17
CHAPITRE VI : REALISATION DE RESEAUX GEODESIQUES
BIDIMENSIONNELS
Didier BOUTELOUP / ENSG / 2002 VI-11
Appelons A et B les deux points de la surface terrestre et 0
0et A B leurs projectionsnormales sur l'ellipsoïde. R
désigne le rayon du cercle osculateur, C son centre et c D
ladistance spatiale2 entre 0 0et A B .
Cherchons c D en fonction de p D , puis
e D en fonction de c D .
C
A0 B
0 Dc
D p
h A h
α R R
De
Fig. 8 : Réduction des distances à l'ellipsoïde
Si α est l'angle entre les vecteurs CA et CB ,
on a :
( ) ( ) ( ) ( ) ( )( )22 2 22
p AB AB AC CB AC CB 2cos A B A B D R h R
h R h R hα= ⋅ = + ⋅ + = + + + − + +uuur uuur uuur uuur uuur
uuur
En appliquant le même raisonnement au triangle ( )0 0, , A
C B , on
obtient :2 2 2 2c 2cos D R R Rα= + −
En isolant cosα dans les deux équations, on arrive à :( )
( )
( ) ( )
2 2 22 2 pc
2
2 A B
A B
R h R h D R D
R R h R h
+ + + −−=
+ +
( ) ( ) ( )( )
( ) ( )
2 222 pc
2
2 A B A B
A B
D R h R h R h R h D
R R h R h
− + − + + + +⇔ =
+ +
( )( ) ( )
2
222 p p 2 2c
c p2
1
1 1
A B
A B
A B A B
h h
D D h h D D D
h h R R h R h
R R
−
− − − ⇔ = ⇔ =+ + + +
En conclusion :2
p
c p
1
1 1
A B
A B
h h
D D D
h h
R R
−−
= + +
2. Dc est aussi appelée «distance selon la
corde».
-
8/17/2019 Geodesie Didier Bouteloup Chap6
14/17
COURS D ' INTRODUCTION À LA GÉODÉSIE
Didier BOUTELOUP / ENSG / 2002 VI-12
Il reste à déterminer e D en fonction de c D .
On sait quec
sin2 2
D
R
α= , ce qui peut
s'écrire c2arcsin2
D
Rα = et :
ce 2 arcsin
2 D D R R
Rα= =
Le développement de arcsin selon les puissances de
x s'écrit :3 2 1
53 3 5 (2 1)arcsin6 40 2 4 (2 ) 2 1
n x n x x x x
n n
+× × × −= + + + + ⋅ +× × × +
LL L
L
On a donc :3 5 2 4
c c c c c
e c3 5 2 4
3 32 1
2 48 1280 24 640
D D D D D D R D
R R R R R
= + + ⋅ + = + + ⋅ +
L L
Or 4c 5 10 m D < × et66,4 10
m R ≈ × d'où on tire les ordres de grandeurs
suivants :
26c
2
411c
4
3 1024
32 10
640
D
R
D
R
−
−
< × ⋅ < ×
Le terme en4
c
4
D
R peut donc être négligé , puisque p D
est connue au mieux à
610− près.
Nous retiendrons la formule dite de cor r ect ion de cour bur
e :
2
c
e c 21 24
D D D R
= +
En toute rigueur, il est nécessaire de connaître les hauteurs
des stations A et B au-dessus de l'ellipsoïde Ah
et Bh pour pouvoir réduire sur l'ellipsoïde la
distance mesurée.Historiquement, les réductions ont été calculées
en utilisant les altitudes H au lieu des
hauteurs h. L'ordre de grandeur de l'erreur ainsi introduite est
celui de h H R
− . En
France métropolitaine, pour le calcul de la triangulation sur
l'ellipsoïde Clarke 1880 IGN,
l'erreur est toujours inférieure à 615
6,4 10× , soit6
310−
.
-
8/17/2019 Geodesie Didier Bouteloup Chap6
15/17
-
8/17/2019 Geodesie Didier Bouteloup Chap6
16/17
COURS D ' INTRODUCTION À LA GÉODÉSIE
Didier BOUTELOUP / ENSG / 2002 VI-14
(NTF) est l'axe de la croix surplombant le Panthéon à
Paris, et le point fondamental duréseau allemand de triangulation
principale DHDN3 est la Tour Helmert à Potsdam.
Les observations sont toujours faites en nombre surabondant,
afin de renforcer et devérifier le réseau :§ mesures de
plusieurs bases,§ observations angulaires redondantes,§
éventuellement observations de points de Laplace : on appelle ainsi
un point du
réseau (donc muni de coordonnées g getλ ϕ ) où sont de plus
déterminés lescoordonnées astronomiques a aetλ ϕ et l'azimut
a Az d'une direction. Ainsi, en telpoint, la
déviation de la verticale est estimée et l'azimut astronomique peut
êtrecorrigé. L'orientation du réseau peut y être vérifiée.
La surabondance est traitée par estimation par moindres
carrés
De tels réseaux sont bidimensionnels dans la mesure où les
observations utilisées nepermettent pas de déterminer les hauteurs
par rapport à l'ellipsoïde h. En général, ladétermination d'un tel
réseau bidimensionnel est associée à l'élaboration d'un
réseaud'altitudes.
Les réseaux bidimensionnels réalisés selon ce processus sont
entachés d'imprécisionscaractéristiques :§ l'échelle de tout le
réseau dépend de la mesure de quelques bases courtes.
L'imprécision relative (quelques 10-6) reste constante sur
l'ensemble du réseau,§
les calculs ont souvent été expédiés, faute de capacité de
calculs suffisante.§ Par exemple, en France, l'imprécision relative
de la NTF est évaluée à 10-5, ce quireprésente 1 cm d'erreur
entre deux points distants de 1 km (ou 10 m pour1000 km).
4.2 Référentiels et systèmes géodésiques
Un défaut majeur des réseaux bidimensionnels est le caractère
non-géocentrique deleurs coordonnées. En effet, l'usage d'un
point fondamental revient implicitement àdéplacer l'origine
O du repère R .
On appelle référentiel géodésique ( ; i, j,k) R
O= un repère affine de l'espace tel que :• est à peu près au
centre de gravité de la Terre,§ i j k = = et i
vaut environ 1,§ (i , j ,k ) est une base
orthogonale directe respectant à peu près l'orientation suivante :§
(O;k ) est parallèle à l'axe de pôles, §
(O;i ,k ) est confondu avec le plan méridien de
Greenwich.On appelle système géodésique la réalisation
numérique d'un référentiel géodésique.
3. Deutsche Hauptdreiecknetz.
-
8/17/2019 Geodesie Didier Bouteloup Chap6
17/17
CHAPITRE VI : REALISATION DE RESEAUX GEODESIQUES
BIDIMENSIONNELS
Didier BOUTELOUP / ENSG / 2002 VI 15
Les référentiels et systèmes géodésiques sous-jacents aux
réseaux bidimensionnels nesont pas exactement géocentriques; leur
origine peut être éloignée du centre de gravitéterrestre jusqu'à
couramment quelques centaines de mètres, et au pire, 2000 m.
Unsystème bidimensionnel est caractérisé comme il suit :• les
coordonnées et l'azimut au point fondamental en fixent l'origine et
l'orientation,• les mesures de bases déterminent le facteur
d'échelle, c'est à dire la norme exacte
des trois vecteurs de base.Deux réseaux basés sur deux points
fondamentaux distincts réalisent donc deuxsystèmes géodésiques a
priori différents.
L'étude des systèmes géodésiques et des transformations entre
systèmes est un point-clef de la géodésie moderne.