5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 1/52
HAMILTON SSTEMLER
Gamze CABAR
Eylül 2006
DENZL

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 2/52
HAMILTON SSTEMLER
Pamukkale Üniversitesi
Fen Bilimleri Enstitüsü
Yüksek Lisans Tezi
Matematik Anabilim Dalı
Gamze CABAR
Danışman: Y. Doç. Dr. Mehmet TEKKOYUN
Eylül 2006
DENZL

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 3/52
iii
YÜKSEK LSANS TEZ ONAY FORMU
Gamze CABAR tarafından Y. Doç. Dr. Mehmet TEKKOYUN yönetiminde hazırlanan
“Hamilton Sistemler” başlıklı tez tarafımızdan okunmuş, kapsamı ve niteliği açısından bir
Yüksek Lisans Tezi olarak kabul edilmiştir.
Pamukkale Üniversitesi Fen Bilimleri Enstitüsü Yönetim Kurulu’nun ...../...../2006 tarih ve
................ sayılı kararıyla onaylanmıştır.
Prof. Dr. Mehmet Ali SARIGÖL
Müdür

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 4/52
iv
TEŞEKKÜR
Bu çalışmanın hazırlanmasında bana destek olan aileme, gerekli bütün imkanları
sağlayarak benden her zaman yakın ilgi ve yardımlarını esirgemeyen değerli hocam Y. Doç.
Dr. Mehmet TEKKOYUN’a , Fizik Bölümü öğretim üyesi Sayın Y. Doç. Dr. Muzaffer
ADAK’a ve tezin yazılmasında emeği geçen Hüseyin Alper BOZ’a teşekkürlerimi sunmayı
bir borç bilirim.
Gamze CABAR

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 5/52
v
Bu tezin tasarımı, hazırlanması, yürütülmesi, araştırmalarının yapılması vebulgularının analizlerinde bilimsel etiğe ve akademik kurallara özenle riayet edildiğini; buçalışmanın doğrudan birincil ürünü olmayan bulguların, verilerin ve materyallerin bilimseletiğe uygun olarak kaynak gösterildiğini ve alıntı yapılan çalışmalara atfedildiğini beyanederim.
mza :
Öğrenci Adı Soyadı: Gamze CABAR

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 6/52
vi
ÖZET
HAMILTON SSTEMLER
Cabar, GamzeYüksek Lisans Tezi, Matematik ABD
Tez Yöneticisi: Y. Doç. Dr. Mehmet TEKKOYUN
Eylül 2006, 42 Sayfa
Bu çalışmada reel ve kompleks Hamilton sistemler incelendi. Bu bağlamda mekanik
sistemlerden bahsedildi. Reel uzayda Lagrange ve Hamilton denklemleri ile ilgili örnekler elealındı. Maple programı yardımıyla kompleks Lagrange ve Hamilton denklemlerine özgünörnekler verildi.
Anahtar kelimeler: Hamilton fonksiyonu, Lagrange fonksiyonu, Hamilton denklemi,Lagrange denklemi
Y. Doç. Dr. Mehmet TekkoyunY.Doç. Dr. Muzaffer Adak
Y. Doç. Dr. Murat Sarı

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 7/52
vii
ABSTRACT
HAMILTONIAN SYSTEMS
Cabar, Gamze M. Sc. Thesis in Mathematics
Supervisor: Y. Doç. Dr. Mehmet TEKKOYUN
September 2006, 42 Pages
In this study real and complex Hamilton systems have been examined. Within thecontext mechanical systems have been mentioned. In real space, related examples onLagrange and Hamilton equations have been dealt with. Original examples have also beengiven to the complex Lagrange and Hamilton equations with the help of Maple program.
Keywords: Hamilton functions, Lagrange functions Hamilton equation Lagrange equation.
Assist. Prof. Dr. Mehmet TekkoyunAssist. Prof. Dr. Muzaffer AdakAssist. Prof. Dr. Murat Sarı

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 8/52
viii
ÇNDEKLER
SayfaYüksek Lisans Tezi Onay Formu..................................................................................iiiTeşekkür.........................................................................................................................ivBilimsel Etik Sayfası.......................................................................................................vÖzet................................................................................................................................viAbstract.........................................................................................................................viiçindekiler....................................................................................................................viiiŞekiller Dizini…………………………………………………………………………ıxTablolar Dizini…………………………………………………………………………x
1.Reel Hamilton Sistemler……………………………………………………………...11.1. Giriş……………………….................................................................................11.2. Lagrange fonksiyonu ve denklemleri…………………………………………..31.3. Hamilton fonksiyonu ve denklemleri…………………………………………..41.4 Uygulamalar…………………………………………………………………….51.5 Sonuç…………………………………………………………………………..28
2.Kompleks Hamilton sistemler………………………………………………………292.1 Sonuç…………………………………………………………………………..39
3.Sonuç ve Öneriler…………………………………………………………………...40
KAYNAKLAR..............................................................................................................41
ÖZGEÇMŞ ………………………………………………………………………......42

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 9/52
ix
ŞEKLLER DZN
Sayfa
Şekil 1.1.1 Kütlesi m olan cisim ve üzerine etki eden kuvvetler……………………………....6Şekil 1.2.1 Bağlantı noktası yukarıya doğru sabit bir a ivmesi ile hareket eden basit
sarkaç ……………………………………………………..………………………………..9Şekil1.3.1 Eğik düzlemin yatayla θ açısını yaptığı an θ açısı sabit bir α sür’atle
artırılıyor.……………………………………………………………………...………….12
Şekil 1.4.1 Bir yayın ucuna m kütleli küçük bir top asılarak oluşturulan sarkaç. Küçük topun
hareketi sırasında hem θ hem de değişir..…………….……………..………...……...16
Şekil 1.5.1 Askı ipi sabit bir şekilde tavana tutturulmuş, diskin en üst noktasına bağlanan
sarkacın salınması sırasında farklı anlardaki görünümü ….…...................................……20
Şekil 1.6.1 Eğik düzlem üzerinde yuvarlanan diskin merkezine asılmış basit sarkaç.
Sarkaç ipinin boyu hareket süresince değişmiyor.……………………………..…………24Şekil 2.1.1 Kütlesi m olan cisim ve üzerine etki eden kuvvetler .……………………………30Şekil 2.2.1 Bağlantı noktası yukarıya doğru sabit bir a ivmesi ile hareket eden basit
sarkaç………………………………………………………………………...……………35

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 10/52
x
TABLOLAR DZN
Sayfa
Tablo:3.1 Lagrange ve Hamilton fonksiyonlarının kıyaslanması…...………….……………...5

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 11/52
1 REEL HAMLTON SSTEMLER
1.1 Giriş
Mekanik; günlük hayatta karşılaştığımız cisimlerin konumlarının zamanla
değişmesi veya durum ve yapılarının bozulmadan kalabilmesiyle ilgili problemleri
inceler ve günlük olaylar çerçevesinde oldukça kesin sonuçlar elde edilmesini sağlar.
Ancak ışık hızına yakın hızlarda hareket eden sistemler için rölativistik mekanik, çok
küçük uzaklık ölçeklerindeki sistemler için kuantum mekaniği ve her iki özelliğe sahip
sistemler için de rölativistik kuantum alan teorisi kullanılmaktadır. Mekanik; kinematik,
dinamik ve statik olmak üzere üç ana bölümden oluşur (Zengin vd 1999).
Kinematik: Cisimlerin konumlarının zamanla değişmesini yani hareketlerini ele
alır. Harekete neden olan kuvvetlerle ilgilenmez ve bu yönüyle dinamikten ayrılır.
Örneğin, deniz yüzeyinden h kadar yükseklikten atılan bir taş kinematiğin konusudur.
Dinamik: Cisimlerin konumlarının değişmesine yol açan nedenler bilindiğinde
cisimlerin hareketlerinin, özelliklerinin nasıl bulunacağını gösterir. Örnek olarak, eğik
düzlem üzerindeki bir bloğun hareketi verilebilir.
Statik: Cisimlerin durum ve yapılarının bozulmadan kalabilmesi, diğer bir ifadeyle,
dengede olabilmeleri için gerekli koşulları saptar. Denge halindeki bir sistem ya
hareketsizdir ya da sabit bir hızla hareket etmektedir. Bu durumda Newton’un üçüncü
yasasına göre, sistem üzerine etki eden net kuvvet ve net tork sıfırdır, tavana iple
tutturulmuş m kütleli basit sarkaç buna örnektir.
Çok iyi bilinen üç temel yasası üzerine kurulan Mekanik; XIX. yüzyılda pek çok
araştırmacının katkılarıyla neredeyse kusursuz bir sistematik yapıya kavuşturulmuştur.
Newton yasaları üzerine kurulan bütün yapı, bugün Klasik Mekanik veya Newton
Mekaniği olarak; XIX. yüzyılda geliştirilen sistematik yapıysa Analitik Mekanik veya
Analitik Dinamik olarak isimlendirilmektedir (Rızaoğlu 2002).

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 12/52
2
Newton denklemlerinin vektörel bir yapıda olması toplam kuvvetin bilinmesine
gereksinim duyulması en büyük güçlüktür. Bu nedenle daha yalın skaler büyüklüklerin
kullanıldığı ve kuvvet vektörünün içinde doğrudan yer almadığı, ilke ve yöntemlerin
bulunmasına çalışılmıştır. Bulunan ve zamanla daha da geliştirilen bu ilke ve
yöntemlerin tümü bugün Analitik Dinamik olarak bilinmektedir. Analitik dinamiğinverdiği sonuçlar Newton denklemlerinin verdiği sonuçların aynısıdır.
Analitik Dinamik; Lagrange ve Hamilton denklemlerinden oluşmaktadır.
Lagrange yöntemi mekaniğin skaler büyüklükler kullanarak yeniden kurulması
açısından önemlidir. Lagrange yöntemi mekanik problemlerin çözümünde başarılıdır,
ancak bu yöntemin en büyük önemi Hamiltonsal yöntemlerin çıkışına yol açmasıdır
(Rızaoğlu 2002).
Lagrange yöntemi mekanik sistemlerin hareket denklemlerinin elde edilmesini
sıradan duruma getirir. Fakat bu denklemlerin çözülmesinde sistematik bir yol
göstermez.
Hamilton yöntemleriyle elde edilen denklemlerin doğrudan çözülebilmeleri
açısından, Lagrange yöntemiyle elde edilen denklemlere herhangi bir üstünlüğü yoktur.
Hamilton denklemlerinin fizikteki önemi, kolay integre edilebilmelerini sağlayan
yöntemlerin geliştirilmesine açık olmaları ve mekaniğin dışında örneğin mikroskopik
cisimlerin arasından sür’atleri ışığın sür’atiyle kıyaslanamayacak kadar küçük olan
cisimlerin davranışlarını açıklayan Kuantum mekaniği alanında da başarıyla
uygulanabilmesidir (Rızaoğlu 2002).
Klasik Mekanik her problemin çözümünde kullanılan bir yöntem olmasa da
günümüzde gökdelenlerden uçaklara kadar pek çok sistemin yıkılmadan,
parçalanmadan kalabilmesi için gerekli koşulların bulunmasında, dünya etrafında
dolanan uyduların yerleştirilmesinde, gezegenlere ve daha ötelere uzay gemilerinin
gönderilmesinde kullanılan bilgiler arasında Klasik Mekaniğin verdiği sonuçlar önemli
bir yer tutar. Bu nedenle Klasik Mekanik hayatımızda önemli bir yere sahiptir. Ayrıca
Klasik Mekanik matematik becerilerimizin ve fiziksel düşünme yeteneğimizin
artmasında da önemli rol oynar (Kibble 1999 ; Rızaoğlu 2002).

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 13/52
3
Kuantum mekaniğinde ve klasik mekanikte sıkça rastlanan Hamilton Sistemler,
uygulamalı bilimlerde önemli bir yere sahiptir. Bu konuda literatürde oldukça çok
çalışma yapılmıştır. Son zamanlarda yapılan çalışmalar; Chang ve vd. (1981) Henon-
Heiles Hamilton’unun sonuçlarını kompleks zaman düzleminde araştırmışlardır. Özer
(1994) çarpım-skalası metodunu çeşitli integrallenebilir sistemlerin (KdV, CKdV,integrallenebilir Klein-Gordon denklemleri) integrallenebilir NLS tip denklemlerini
çıkarmak için uygulamış, Henon-Heiles sistemi olarak açıkladığı bu metodun sonlu
boyutlu Hamilton sistemler için uygulanabilir oldugunu göstermiştir. Civelek (1996)
genişletilmiş vektör demetleri üzerinde Lagrange ve Hamilton denklemlerinin düşey ve
tam lift’lerini ele almıştır. De Leon vd. (2001) klasik alan teorilerini göz önünde
bulundurarak simplektik ve kosimplektik manifoldlar üzerindeki Hamilton çatısını
genişletmişlerdir. Tekkoyun (2002) Hamilton denklemlerini lift teoriyi kullanarak
genişletmiş Kahler manifoldlara genelleştirmiştir ve yüksek mertebeden türevleri içeren
Hamilton denklemlerinin geometrik özelliklerini sonuçlarnı vermiştir. Zabzine (2005)
genelleştirilmiş kompleks yapı ile genişletilmiş world-sheet süpersimetrisi arasındaki
ilişkiyi açıklayarak bu analizin sigma modellerinin geniş sınıfının faz uzayı tanımına
dayalı olduğunu belirtmiştir.
Bu çalışmada ise; Tekkoyun’un (2002) temellendirdiği kompleks Lagrange ve
Hamilton denklemlerine özgün uygulamalar verilecektir.
1.2 Lagrange Fonksiyonu ve Denklemleri
Sistemi tanımlamak için yeterli olan birbirinden bağımsız genelleştirilmiş
koordinatlarınnqqq ,...,, 21 ve bunların zamana göre birinci türevlerinin,
nqqq ,...,, 21
olduğunu kabul edelim. Sistemin Lagrange fonksiyonu; sistemin T kinetik enerjisi ile
V potansiyel enerjisinin farkına eşit olup; V T L −= şeklinde gösterilir. Burada
sistemin Lagrange denklemleri ise;
0)( =∂
∂−
∂
∂
ii q
L
q
L
dt
d
, n,1,2,3,…=i (1.2.1)
olarak verilir (Rızaoğlu 2002).
Bu denklem sistemi kartezyen koordinatlar n x x x ,...,, 21 kullanılarak ifade edilebilir.
Bu durumda (1.2.1) denklemi;

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 14/52
4
0)( =∂
∂−
∂
∂
ii x
L
x
L
dt
d
, n,1,2,3,…=i (1.2.2)
şeklinde ifade edilebilir.
ii
ii p xm x
T
x
L==∂
∂=∂
∂ ( p =momentum)
ve
i
ii
F x
V
x
L−=
∂
∂=
∂
∂
olmasından iiF p = yani F p
= şeklinde Newton denklemleri elde edilir.
1.3 Hamilton Fonksiyonu ve Denklemleri
Hamilton fonksiyonu;
),,(),,(1
t qq Lq pt pq H n
i
ii −=∑
=
, n,1,2,3,…=i (1.3.1)
şeklinde tanımlanır (Rızaoğlu 2002).
Bu bağıntının her iki tarafının diferansiyeli alınırsa;
dt t
H dp p
H dqq
H dH i
i i
i
i ∂
∂+∂
∂+∂
∂=∑ )(
olmasından
dt t
Lqd
q
Ldq
q
Lqdpqd p
dt t
H dp
p
H dq
q
H
i
i
i
i
i
n
i
iiii
n
i
i
i
i
i
∂
∂−
∂
∂+
∂
∂−+=
∂
∂+
∂
∂+
∂
∂
∑∑
∑
=
=
)()(
)(
1
1
(1.3.2)
elde edilir. Buradai
iq L p∂∂= ifadesi ve (1.2.1) Lagrange hareket denklemi kullanılırsa
(1.3.2) ile verilen denklem aşağıdaki şeklini alır.

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 15/52
5
dt t
L
dq pdpq
dt t
Ldq
q
L
dt
d dpq
dt t
H dp
p
H dq
q
H
ii
iii
i
i
i ii
ii
i
i
i
i
i
∂
∂
−−=
∂
∂−
∂
∂−=
∂
∂+
∂
∂+
∂
∂
∑∑
∑∑
∑
)(
)(
(1.3.3)
iq genelleştirilmiş koordinatlarıyla i
p genelleştirilmiş momentumlarının bağımsız
olarak alındığı anımsanırsa
i
i p
H q
∂
∂= ,
i
iq
H p
∂
∂−= ,
t
L
t
H
∂
∂−=
∂
∂, n,1,2,3,…=i (1.3.4)
denklemleri elde edilir. Burada birinci mertebeden 2n-tane diferansiyel denklem vardır.
Bu denklemler ilk defa Hamilton tarafından elde edilmiştir ve Hamilton Denklemleri
olarak bilinirler.
Lagrange ve Hamilton fonksiyonları ile ilgili kıyaslama aşağıdaki gibi yapılabilir.
Tablo 3.1 Lagrange ve Hamilton fonksiyonlarının kıyaslanması
Hamilton Lagrange
Genel Formül ),,(),,( t qq Lq pt pq H i
ii −=
∑ V T t qq L −=),,(
Mertebeleri 1.mertebe 2. mertebe
Bağımsız değişken qi koordinatları
pi momentumları
qi koordinatları
iq hızları
Tanımlandıkları uzay Faz uzayı
(2n-boyutlu soyut uzay)
Konfigürasyon uzayı
(n-boyutlu soyut uzay)
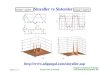
1.4 UygulamalarÖrnek 1.1 Sabit bir kütle-çekim alanında bulunan m kütleli bir cismin üzerine, Şekil
1.1.1 de görüldüğü gibi büyüklüğü 1)( −= α ρ ρ A f ( 1,0≠α ) olan ve kuvvet merkezi
orijinde bulunan, bir merkezcil kuvvet alanı etki ediyor. Cismin devamlı aynı düşey
düzlem içinde kaldığını kabul ederek, Lagrange ve Hamilton hareket denklemlerini
bulunuz (Rızaoğlu 2002).

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 16/52
6
Şekil 1.1.1 Kütlesi m olan cisim ve üzerine etki eden kuvvetler
Çözüm: Sistemin kinetik enerjisi;
)(2
1)(
2
1 2222 y xmvvmT
y x +=+=
olupϕ ρ ϕ ρ sin,cos == y x ifadelerinde x ve y ’nin zamana göre birinci türevleri
sırasıyla;
ϕ ϕ ρ ϕ ρ ϕ ϕ ρ ϕ ρ cossin,sincos +=−= y x
olarak bulunur.
Buradan x ve y ’nin karesi alınıp taraf tarafa toplanırsa
ϕ ϕ ρ ϕ ϕ ϕ ρ ρ ϕ ρ 222222 sincossin2cos +−= x ,
ϕ ϕ ρ ϕ ϕ ϕ ρ ρ ϕ ρ 222222 coscossin2sin ++= y ,
22222ϕ ρ ρ +=+ y x
şeklinde hesaplanır. Dolayısıyla sistemin kinetik enerjisi
)(2
1 222 ϕ ρ ρ += mT
konumuna gelir.
V F ∇−=
’den ∫−= r d F V
.
olur. ρ ρ ρ ρ α ˆ,ˆ1 d r d AF =−= − olduğundan ρ ρ α d Ar d F 1. −−=
bulunur.
Buradan α α ρ α
ρ ρ ∫ =−−= − Ad AV 1 ve α
ρ α
ϕ ρ A
mgV top += sin elde edilir.
Bu durumda sistemin Lagrange fonksiyonu;
y
x
f m
ϕ
ρ

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 17/52
7
V T L −= ’den
α ρ ϕ ϕ ρ ρ A
mgm L −−+= sin)(2
1 222 şeklinde olur.
Sistemin Lagrange hareket denklemleri:
1) 0)( =∂
∂−
∂
∂
ρ ρ
L L
dt
d
2) 0)( =
∂
∂−
∂
∂
ϕ ϕ
L L
dt
d
olup bu denklemlerin çözümleri sırasıyla
1) 0sin)22
1()2
2
1( 12 =++− −α ρ ϕ ϕ ρ ρ Amgmm
dt
d ,
0sin12 =++− − ϕ ρ ϕ ρ ρ α mg Amm
ve
2) 0cos)22
1( 2 =− ϕ ρ ϕ ρ mgm
dt
d
0cos)( 2 =− ϕ ρ ϕ ρ mgmdt
d
olur.
Sistemin Hamilton fonksiyonunun elde edilebilmesi için ρ ve ϕ ye bağlımomentumlar;
ρ ρ ρ
ρ
mm
L p ==
∂
∂= 2
2
1, ϕ ρ ϕ ρ
ϕ ϕ
22 22
1mm
L p ==
∂
∂=
şeklinde olur. Sistemin L p p H −+= ϕ ρ ϕ ρ Hamilton fonksiyonu;
α ρ α
ϕ ρ ϕ ρ ρ ϕ ρ ρ A
mgmmm H +++−+= sin)(2
1 222222
α ρ α
ϕ ρ ϕ ρ ρ A
mgmm
+++= sin22
222
şeklinde elde edilir. Diğer taraftan ρ ve ϕ çekilip Hamilton fonksiyonunda yerine
yazılırsa;

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 18/52
8
ϕ ρ ρ ϕ ρ
2, m pm p == ’dan2
, ρ
ϕ ρ ϕ ρ
m
p
m
p== olur. Bu denklemler sistemin
L p p H −+= ϕ ρ ϕ ρ Hamilton fonksiyonunda yerine yazılırsa
ϕ ρ ρ α ρ
ρ
ρ
α ϕ ρ ϕ
ϕ
ρ
ρ sin)(2
1
. 42
22
2
2
2 mg
A
m
p
m
p
mm
p
pm
p
p H +++−+=
ϕ ρ ρ α ρ ρ
α ρ ρ ϕ ρ sin
22. 2
22
2
22
mg A
m
p
m
p
m
p
m
p++−−+=
ϕ ρ ρ α ρ
α ϕ ρ sin
22 2
22
mg A
m
p
m
p+++=
olarak bulunur.
Hamilton denklemleri de
1) ρ
ρ p
H
∂
∂= ,
ρ ρ
∂
∂−=
H p
m
p
m
p ρ ρ ρ ==
2
2
]sin2
2[ 12
ϕ αρ α
ϕ ρ α
ρ mg Am
p ++−= −
]sin[ 12 ϕ ρ ϕ ρ α mg Am ++−= −
]sin[ 1
42
2
ϕ ρ ρ
ρ α ϕ
mg Am
Pm ++−= −
ϕ ρ ρ
α ϕ sin1
3
2
mg Am
p−−−= −
2)ϕ
ϕ p
H
∂
∂= , ϕ
ϕ ∂∂−=H
p ’dan
222
.2
ρ ρ ϕ
ϕ ϕ
m
p
m
p== ve
ϕ ϕ ρ ϕ ϕ ρ ϕ cos)cos( mgmg p −=−=
şeklinde elde edilir.

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 19/52
9
Örnek 1.2 Şekil 1.2.1’de görülen ve bağlantı noktası yukarıya doğru sabit bir a ivmesi
ile hareket eden; bir basit sarkacın küçük salınımlarının Lagrange ve Hamilton
fonksiyonlarını yazıp hareket denklemlerini çıkarınız (Rızaoğlu 2002):
Şekil 1.2.1 Bağlantı noktası yukarıya doğru sabit bir a ivmesi ile hareket eden basit
sarkaç
Çözüm: Herhangi bir t anında sarkacın bağlantı noktasının orijinden η kadar ötede
olduğunu varsayalım. Buna göre sarkacın ucundaki m kütleli noktasal cismin x ve y
koordinatları sırasıyla ,
θ sin= x , η θ −= cos y
olur. Buradan cismin kinetik enerjisi;
)(2
1 22 y xmT += ’den, θ θ cos = x θ θ
2222 cos = x
η θ θ −−= sin y η θ θ η θ θ η θ θ sin2sin)sin( 222222 ++=−−= y
)sin2sincos(2
1 2222222
η θ θ η θ θ θ θ
+++= mT
)sin2(2
1 222θ η θ η θ ++= m (1.4.1)
ve potansiyel enerjisi de x -ekseni boyunca
0=V kabul edildiğinde
y
x
θ
η
η θ −cos
θ cos
m
θ sin

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 20/52
10
)cos( η θ −−= mgV
olarak bulunur. O halde sarkacın V T L −= Lagrange fonksiyonu
)cos()sin2(2
1 222 η θ θ η θ η θ −+++= mgm L .
Buradan 0)( =∂
∂−
∂
∂
θ θ
L L
dt
d
Lagrange’ın θ’ya bağlı hareket denklemi
0sincos22
1)sin2
2
12
2
1( 222 =+−+ θ θ θ θ η θ η θ mgmmm
dt
d
0sincos)sin( 222 =+−+ θ θ θ θ η θ η θ mgmmmdt
d
olarak elde edilir.
0)( =∂
∂−
∂
∂
η η
L L
dt
d
Lagrange’ın η’ye bağlı hareket denklemi
0)sin22
1.2
2
1( =++ mgmm
dt
d θ θ η
0)sin( =++ mgmmdt
d θ θ η
bulunur.
Sarkacın L p p H −+= η θ η θ Hamilton fonksiyonunu yazabilmek için θ ve η’ye bağlı
momentumları,
θ η θ θ η θ θ
θ sinsin22
12
2
1 22
mmmm
L p +=+=
∂
∂=
ve
θ θ η θ θ η η η sinsin22
1
22
1 mmmm
L
p +=+=∂
∂
=
olmak üzere
)cos()sin2(2
1sinsin 222222 η θ θ θ η η θ θ θ η η θ η θ θ −−++−+++= mgmmmmm H
elde edilir ve gerekli işlemler yapılırsa,

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 21/52
11
η θ θ θ η η θ
mgmgmmm
H +−++= cossin22
222
(1.4.2)
bulunur.
θ η θ θ sin2
mm p += ’dan 2
sin
m
m p θ η θ
θ −= (1.4.3)
ve
θ θ η η sin mm p += danm
m p θ θ η
η sin
−= (1.4.4)
elde edilir.
(1.4.3) ve (1.4.4) eşitlikleri (1.4.2) ile verilen Hamilton fonksiyonunda yerine yazılırsa;
η θ θ θ η θ θ
θ θ θ η
θ η
η θ
mgmgm
m p
m
m pm
m
m pm
m
m pm
H
+−−−
+
−
+
−
=
cossinsinsin
2
)sin
(
2
)sin
(
2
222
2.
m
m p
m
m p H
2
)sin(
2
)sin(2
2
2 θ θ θ η η θ
−+
−=
η θ θ
θ η
θ θ θ
η mgmgm
m p
m p +−
−
−+ cossin
)sin(
)sin(
(1.4.5)
bulunur. Dolayısıyla (1.4.5) ile verilen fonksiyona ait yukarıdaki Hamilton denklemleri
aşağıdaki gibidir.
1)η
η P
H
∂
∂= ve
η η
∂
∂−=
H p den
θ θ η θ θ
η θ η
sinsin
2
sin22
m
m p
m
m p −+
−
= ,
θ θ η θ θ
θ η sinsinsin
m
m p
m
m p −+
−=
ve
mg p −=η

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 22/52
12
bulunur.
2)θ
θ p
H
∂
∂= ve
θ θ
∂
∂−=
H p dan
m
m p
m
m p θ θ θ θ η θ
η θ sin)sin(sin
2
−+
−=
ve
θ θ θ θ η
θ θ θ θ η θ
sincos
)sincos(2
2
mgm
mgm p
−−=
+−=
şeklinde elde edilir.
Örnek 1.3 Şekil 1.3.1 de m kütleli noktasal bir cisim başlangıçta, sürtünmesiz yatay bir
düzlemin bir ucunda durmaktadır. Düzlemin cismin durduğu ucu sabit bir α sür’atiyle
(burada süratten kasıt θ açısının birim zaman aralığındaki değişme miktarıdır) yukarıya
kaldırılıyor. Düzlemin herhangi bir anda yatayla yaptığı açıyı θ ile gösterelim. Cismin
Lagrange ve Hamilton fonksiyonlarını yazıp denklemlerini belirleyiniz.(Rızaoğlu 2002).
Şekil 1.3.1 Eğik düzlemin yatayla θ açısını yaptığı an θ açısı sabit bir sür’atle
artırılıyor.
Çözüm: Cismin herhangi bir t anında eğik düzlem boyunca orijinden olan uzaklığını
r(t) ile gösterelim. Hem r hem de θ zamanla değiştiğine göre, cismin kinetik enerjisi
)(2
1)(
2
1
2
1 2222222 α θ r r mr r mmvT +=+== .
Düzlemin ilk konumunun belirlediği yatay düzlemde kütle-çekim potansiyel enerjisi
sıfır alındığında, cismin potansiyel enerjisi
θ 0
)(t r

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 23/52
13
)sin( t mgr V =
yazılır. Buna göre cismin Lagrange fonksiyonu;
V T L −= den )sin()(2
1 222 t mgr r r m L α α −+=
olur. Buradan Lagrange hareket denklemleri sırasıyla
1) 0)( =∂
∂−
∂
∂
r
L
r
L
dt
d
dan
0)sin(22
1)2
2
1( 2 =+− t mgr mr m
dt
d α α
olup gerekli işlemler yapılırsa
0)sin()( 2 =+− t mgmr r mdt d α α ,
bulunur ve buradan da
0)sin(2 =+− t mgmr r m α α
veya
)sin(2 t gr r α α −=−
olarak elde edilir. Elde edilen denklem ikinci mertebeden sabit katsayılı homojen
olmayan bir diferansiyel denklemdir. Öncelikle homojen kısmın çözümü
02 =− α r r ’dan
022 =−α D
ya da
±= D ve dolayısıyla
t t
h Be Aer α α += −
elde edilir.
=)cosh(2 t t t eeα α −+ ve t t eet α α α −−=)sinh(2 ifadelerinden
)sinh()cosh( t t e t α α α += ve )sinh()cosh( t t e t α α α −=− eşitlikleri elde edilir.
0))sinh()(cosh())sinh()(cosh( =++− t t Bt t A α
olup

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 24/52
14
0)sinh()()cosh()( =−++ t B At B A α elde edilir.
Buradan,
A+B=C ve A-B=D denilirse homojen çözüm
)sinh()cosh( t Dt C r h
+=
şeklinde elde edilir. Özel çözüm ise
)sin()cos( 21 t ct cr p α +=
)cos()sin( 21 t ct cr p α +−=
)sin()cos( 22
12 t ct cr
p α α α α −−=
elde edilir. Dolayısıyla
)sin(2 t gr r p p
α α −=−
olup buradan
)sin())sin()cos(()sin()cos( 212
22
12 t gt ct ct ct c α α α α α α α α −=+−−−
)sin())sin()cos((2 212 t gt ct c α α α α −=+−
elde edilir.
02 1
2
=− cα ve gc −=− 2
2
2α dan 01 =c ve 22 2α
g
c = olarak bulunur.
O halde )sin(2 2
t g
r p α α
= olup genel çözüm
)sin(2
)sinh()cosh()(2
t g
t Dt C t r α α α ++=
şeklinde elde edilir.
0=t anında cismin O noktasına olan uzaklığı 0r ile gösterilirse, cisim durduğuna göre
0=o
v olur. Bu başlangıç koşullarına göre genel çözüm, 0r C = ve 0=t için
)cos(2
)cosh()sinh()(2
t g
t Dt C t r α α
α α α α α ++=
ve
0)0( 0 ==V r

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 25/52
15
olup buradan
)0cos(2
)0cosh()0sinh(0 α α g
DC ++=
elde edilir.
α α
20
g D += den
22α
g D −= olur.
O halde cismin herhangi bir t anında eğik düzlem boyunca orijinden olan uzaklığı
)sin(2
)sinh(2
)cosh(220 t
gt
gt r r α
α α α +−=
olarak bulunur.
Sistemin Lr p H r
−= Hamilton fonksiyonu
r mr mr
L p
r
==
∂
∂= )2(
2
1’den
)sin()(2
1 2222 t mgr r r mr m H α α ++−=
şeklinde bulunur. Sistemin Hamilton fonksiyonu momentuma bağlı yazılırsa r m pr =
dan r çekilip Hamilton fonksiyonunda yerine konursa
)sin()(2
1 22
2
2
2
2
t mgr r m
pm
m
pm H r r α α ++−=
veya
)sin(22
2222
t mgr mr
m
p
m
p H r r α
α +−−=
veya
)sin(
22
222
t mgr mr
m
p H r α
α +−=
olarak bulunur.
Hamilton denklemi
r P
H r
∂
∂= ve
r
H pr
∂
∂−= olup

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 26/52
16
m
p
m
pr r r ==
2
2
ve
)sin(
))sin((
))sin()2(2
1(
2
2
2
t mgmr
t mgmr
t mgr m pr
α α
α α
α α
−=
+−−=
+−−=
elde edilir.
Örnek 1.4 Yay sabiti k , boyu 0 olan ve kütlesiz kabul edilebilen bir yay Şekil 1.4.1’de
görüldüğü gibi, bir ucundan tavana asılmış ve öteki ucuna da kütlesi m olan küçük bir
top takılmıştır. Küçük top hem yayın ucunda düşey düzlem içinde salınmakta ve hem de
denge konumu etrafında titreşmektedir. Cismin Lagrange ve Hamilton denklemlerini
yazınız (Rızaoğlu 2002).
Şekil 1.4.1 Bir yayın ucuna m kütleli küçük bir top asılarak oluşturulan sarkaç. Küçük
topun hareketi sırasında hem θ hem de değişir.
Çözüm: Cismin salınması sırasında, yayın herhangi bir t anında düşey doğrultuyla
yaptığı açı θ olsun. Cismin denge durumu etrafında aşağı yukarı titreşmesi sırasında
yayın t anındaki boyunu ile gösterelim. Koordinat sisteminin orijini olarak yayın askı
noktasını alalım. m kütlesinin konumunu belirlemek için en uygun koordinatlar kutupsal
koordinatlardır. Cismin 2
2
1vmT
= kinetik enerjisi hesaplanırsa;
)(2
1 22 y xmT +=
olur.
θ
m

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 27/52
17
θ θ cos,sin == y x
olup bu koordinatların zamana göre birinci türevleri;
θ θ θ sincos += x , θ θ θ cossin +−= y
dır.θ θ θ θ θ θ 222222 sinsincos2cos ++= x
θ θ θ θ θ θ 222222 cossincos2sin +−= y
olup verilen eşitlikleri taraf tarafa toplanıp formülde yerine yazılırsa;
22222 +=+ θ y x den
)(2
1 222 += θ mT
olarak bulunur. Sistemin, hem yerin sabit kütle-çekim alanında bulunması hem de yayın
titreşmesi sırasında gerilmesi veya sıkışması nedeniyle, iki potansiyel enerjisi vardır.
Yerin kütle-çekim potansiyelini orijinin bulunduğu düzeyde sıfır kabul edelim. Sistemin
toplam potansiyel enerjisi
20 )(
2
1cos −+−= k mgV θ ,
Buna göre sistemin V T L −= Lagrange fonksiyonu
20
222 )(21cos)(
21 −−++= k mgm L θ θ
olur. Buradan sistemin titreşim ve salınım hareket denklemleri olan Lagrange
denklemleri yazılırsa;
1) 0)( =∂
∂−
∂
∂
L L
dt
d dan
,0))22(
2
1cos2
2
1()2
2
1( 0
2 =−−+− k mgmm
dt
d θ θ
0)cos()( 02 =+−+− k k mgmm
dt
d θ θ ,
,0cos 02 =−+−− k k mgmm θ θ

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 28/52
18
0)(cos 02 =−+−−
m
k g θ θ ,
bulunur.
2) 0)( =∂
∂−
∂
∂
θ θ
L L
dt
d
dan
0)sin()22
1( 2 =−− θ θ mgm
dt
d ,
0sin)( 2 =+ θ θ mgmdt
d ,
0sin2
222
2
=++
m
mg
m
m
m
m θ θ θ ,
0sin1
2 =++ θ θ θ
g ,
elde edilir.
Sistemin L p p H −+=
θ θ Hamilton fonksiyonunun elde edilmesi için
θ θ
θ θ
22 2
2
1mm
L p ==
∂
∂=
mm L
p ==∂
∂= 2
2
1
olup Hamilton fonksiyonu
20
222222 )(2
1cos
2
1
2
1 −+−−−+= k mgmmmm H θ θ θ ,
20
222 )(
2
1cos
22
−+−+= k mgmm
H θ θ (1.4.6)
olarak hesaplanır.
Sistemin Hamilton fonksiyonunu momentumlar cinsinden yazmak için θ ve çekilirse
θ θ
2m p = dan2
m
pθ θ = (1.4.7)
ve

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 29/52
19
m p = denm
p
= , (1.4.8)
olur. (1.4.7) ve (1.4.8) eşitlikleri; (1.4.6) ile verilen Hamilton fonksiyonunda yerine
yazılırsa
202
2
42
22 )(
2
1cos
22
−+−+= k mg
m
pm
m
pm H θ θ veya
20
2
2
2
)(2
1cos
22
−+−+= k mgm
p
m
p H θ θ
olarak bulunur.
Buradan Hamilton denklemleri
1)θ
θ p H ∂∂= ,
θ θ
∂∂−= H p dan
222
2
m
p
m
p θ θ θ == ,
θ θ θ sin mg p −= elde edilir.
2)
p
H
∂
∂= ,
∂
∂−=
H p den
m
p
m
p
==2
2,
02
02 cos2
2
12
2
1cos2
2
k k mgmk k mg
m p +−+−=+−+−= θ θ θ θ
bulunur.
Örnek 1.5 Boyu olan bir ipin bir ucu R yarıçapında ve sabit bir şekilde tavana
tutturulmuş bir diskin en uç noktasına bağlanmıştır. Cismin öteki ucuna kütlesi m olan
küçük bir top takılarak Şekil 1.5.1’de gösterilen bir sarkaç yapılmıştır. Sarkacın küçük
salınımlarının Lagrange ve Hamilton hareket denklemlerini bulunuz (Rızaoğlu 2002).

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 30/52
20
Şekil 1.5.1 Askı ipi sabit bir şekilde tavana tutturulmuş, diskin en üst noktasına
bağlanan sarkacın salınması sırasında farklı anlardaki görünümü
Çözüm: Sarkacın salınması sırasında ip diske dolanacak ve boyu değişecektir. Sarkacın
herhangi bir anında salınma açısı ϕ kabul edilsin. Şekil 1.5.1 de görüldüğü gibi, ipin
diske teğet olduğu noktayı diskin merkezine birleştiren yarıçapın yatay doğrultuyla
yaptığı açı da ϕ olur. Bu anda sarkaç ipinin boyu )
2
( ϕ π −− R uzunluğuna eşittir.
( ϕ −90 dilimlik yayın uzunluğu; )2
()90(360
902 ϕ
π ϕ
ϕ π −=−=
− R R R olup ipin boyu
idi. O halde sarkaç ipinin boyu )2
( ϕ π −− R olur) Buna göre m kütlesinin koordinatları;
ϕ ϕ π
ϕ sin))2
((cos −−+= R R x
ϕ ϕ π
ϕ cos))2
((sin −−+−= R R y .
Buradan bu koordinatlar yardımıyla hızı elde etmek için zamana göre birinci türevleri
alınırsa
ϕ ϕ ϕ π
ϕ ϕ ϕ π
ϕ ϕ cos))2
((cos))2
((sinsin −−=−−++−= R R R R x ,
ϕ ϕ ϕ π
ϕ ϕ cos))2
((sinsin −−++−= R R R x
ϕ
m
y
ϕ sin R ϕ
cos R ϕ
sin R R ϕ −
x
R

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 31/52
21
ϕ ϕ ϕ π 2222 cos))2
(( −−= R x ,
ϕ ϕ ϕ π
ϕ ϕ ϕ π
ϕ ϕ sin))2
((sin))2
((coscos −−−=−−−+−= R R R R y
ϕ ϕ ϕ π 2222 sin)}2
(( −−= R y
olup buradan sistemin )(2
1 22 y xT += kinetik enerjisi
22))2
((2
1ϕ ϕ
π −−= RmT dir.
x-ekseninin belirlediği düzeyde kütle-çekim potansiyel enerjisi sıfır seçilirse, sarkacın
potansiyel enerjisi
)sincos))2
((( ϕ ϕ ϕ π R RmgV −−−−=
olup sistemin V T L −= Lagrange fonksiyonu,
)sincos))2
((())2
((2
1 22 ϕ ϕ ϕ π
ϕ ϕ π
R Rmg Rm L −−−+−−=
olarak elde edilir.
Sistemin Lagrange denklemi
0)( =∂∂−
∂∂
ϕ ϕ
L L
dt
d
dan
ϕ ϕ π
ϕ ϕ π
ϕ
22 ))2
((2))2
((2
1−−=−−=
∂
∂ Rm Rm
L,
)coscossin))2
((())2
((22
1 2ϕ ϕ ϕ ϕ
π ϕ ϕ
π
ϕ R R Rmg R Rm
L−+−−−+−−=
∂
∂ ,
ϕ ϕ
π
ϕ ϕ
π
ϕ sin))2(())2((
2
−−−−−=∂
∂
Rmg R Rm
L
0sin))2
(())2
(()))2
((( 22 =−−+−−−−− ϕ ϕ π
ϕ ϕ π
ϕ ϕ π
Rlmg R Rm Rmdt
d

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 32/52
22
ϕ ϕ π
ϕ ϕ π
ϕ ϕ π
ϕ ϕ π
sin))2
(())2
(())2
(()2
(2 222 −−+−−−−−++− Rmg R Rm Rm R R Rm
0
))2((
sin))2
((
))2((
))2
((
))2((
))2
((
22
2
2
2
=
−−
−−+
−−
−−+
−−
−−
ϕ π
ϕ ϕ π
ϕ π
ϕ ϕ π
ϕ π
ϕ ϕ π
Rm
Rmg
Rm
Rm
Rm
R Rm
0sin))
2(())
2((
2 =
−−
+
−−
+ ϕ
ϕ π
ϕ
ϕ π
ϕ
R
g
R
R
olur.
Sistemin L p H −= ϕ ϕ Hamilton fonksiyonu ve denklemi
ϕ ϕ
π
ϕ ϕ
π
ϕ ϕ
22
))2(())2((22
1
−−=−−=∂
∂
= Rm Rm
L
p (1.4.9)
olup sistemin Hamilton fonksiyonu
)sincos))2
((())2
((2
1))
2(( 2222
ϕ ϕ ϕ π
ϕ ϕ π
ϕ ϕ π
R Rmg Rm Rm H −−−−−−−−−= ,
ϕ ϕ ϕ π
ϕ ϕ π
sincos))2
(())2
((2
22mgR Rmg R
m H +−−−−−= (1.4.10)
elde edilir.
Sistemin Hamilton fonksiyonu momentumlar cinsinden yazılmak istenirse (1.4.9)
denklemlerinden;
ϕ ϕ π
ϕ
2))2
(( −−= Rm p
olup ϕ yalnız bırakılırsa
2))
2
(( ϕ π
ϕ ϕ
−−
=
Rm
p
olup (1.4.10) Hamilton fonksiyonu;
ϕ ϕ ϕ π
ϕ π
ϕ π ϕ sincos))
2((
))2
(())
2((
2 42
2mgR Rmg
Rm
p R
m H +−−−
−−
−−=
,

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 33/52
23
ϕ ϕ ϕ π
ϕ π
ϕ sincos))
2((
))2
((2 2
2
mgR Rmg
Rm
p H +−−−
−−
=
(1.4.11)
elde edilir.
(1.4.11) Hamilton fonksiyonundan yararlanarak Hamilton denklemi yazılmak istenirse;
22 ))2
(())2
((2
2
ϕ π
ϕ π
ϕ ϕ ϕ
ϕ −−
=
−−
=∂
∂=
Rm
p
Rm
p
p
H
ve
ϕ ϕ ϕ ϕ ϕ π
ϕ
ϕ π
ϕ ϕ ϕ ϕ ϕ π ϕ
ϕ π
ϕ π
ϕ
ϕ
ϕ
ϕ
cossin))2
((cos))
2((
cossin))2
((cos))
2((4
))
2
((22
3
2
42
2
mgR RmgmgR
Rm
R p
mgR RmgmgR
Rm
R Rm p
H p
+−−+−
−−
−=
+−−+−−−
−−
−=
∂
∂−=
elde edilir
Örnek 1.6 Şekil 1.6.1 deki yarıçapı R ve kütlesi M olan bir disk, eğim açısı olan bir
eğik düzlem üzerinde kaymadan yuvarlanmaktadır. Diskin merkezine yerleştirilmiş ufak
bir çivi üzerine bir sarkaç bağlanmıştır. Sarkaç ipi, sarkacın salınması sırasında
bağlanmış olduğu çiviye dolanmıyor. Sarkaç ipinin boyu R< ve ucundaki kütlede
m olsun. Sarkacın disk düzleminde serbestçe salındığını varsayarak sistemin Lagrange
ve Hamilton denklemlerini çıkarınız (Rızaoğlu 2002).

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 34/52
24
Şekil 1.6.1 Eğik düzlem üzerinde yuvarlanan diskin merkezine asılmış basit sarkaç.
Sarkaç ipinin boyu hareket süresince değişmiyor.
Çözüm: Koordinat sistemi şekilde gösterildiği gibi seçilsin. Diskin yuvarlanmasını
belirleyen açı θ olsun ve disk eğik düzlemin en üst noktasından harekete başlasın. Disk
eğik düzlem boyunca kaymadan yuvarlandığına göre, herhangi bir t anında eğik düzlem
boyunca θ R kadar yol almış olacaktır. Diskin kütle merkezinin X ve Y koordinatlarışekilden kolaylıkla görülebildiği gibi;
α θ sincos R R X += ve θ cossin R RhY +−= .
Sarkacın düşey doğrultuda yaptığı salınma açısını ϕ ile gösterildiğinde, sarkaç
kütlesinin koordinatları;
ϕ sin+= X x ve ϕ cos−= Y y olur.
Sistemin kinetik enerjisi yazılmak istenirse;
22222
)(4
1
)(2
1
)(2
1
θ
R M Y X M y xmT ++++=
Burada 2
2
1 MR ; M kütleli diskin eylemsizlik momentidir.
α θ cos R X = ve α θ 2222 cos R X =
α θ sin RY −= ve α θ 2222 sin RY =
olup buradan
α m
y
ϕ cos R α
sin Rθ ϕ
x
α
α
sin R α cos Rθ α
Rθ
M
R
h-Rθ sinα
h

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 35/52
25
2222222222 sincos R R RY X θ α θ α θ =+=+
elde edilir.
ϕ ϕ α θ coscos += R x
veϕ ϕ ϕ α ϕ θ α θ 2222222 coscoscos2cos ++= R R x
α ϕ α θ sinsin +−= R y
ve
ϕ ϕ ϕ α ϕ θ α θ 2222222 sinsinsin2sin +−= R R y
ϕ ϕ ϕ α ϕ θ
α θ ϕ ϕ ϕ α ϕ θ α θ
222
22222222222
sinsinsin2
sincoscoscos2cos
+−
+++=+
R
R R R y x
2222
222222
)cos(2
)sinsincos(cos2
ϕ ϕ α ϕ θ θ
ϕ ϕ α ϕ α ϕ θ θ
+++=
+−+=+
R R
R R y x
olup sistemin kinetik enerjisi
22222222
4
1
2
1))cos(2(
2
1θ θ ϕ ϕ α ϕ θ θ MR R M R RmT +++++=
bulunur. Sistemin potansiyel enerjisi
)coscossin()cossin( ϕ α θ α α θ −+−++−= R Rhmg R Rh MgV
ϕ α θ cos)cossin()( mg R Rhgm M −+−+=
olup V T L −= Lagrange fonksiyonu;
)coscossin()cossin(4
1
2
1))cos(2(
2
1 22222222
ϕ α α θ α α θ
θ θ ϕ ϕ α ϕ θ θ
−+−−+−−
+++++=
R Rhmg R Rh Mg
MR R M R Rm L
elde edilir. Buradan diskin θ koordinatına göre olan Lagrange denklemi;
0)( =∂
∂−
∂
∂
θ θ
L L
dt
d
dan
0sin)()2
1)cos(( 2222 =+−+++++ α θ θ θ ϕ α ϕ θ gRm M R M R M mmR Rm
dt
d ,

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 36/52
26
,0sin)(2
1
)sin()cos(
2
2222
=+−+
+++−++
α θ
θ θ ϕ α ϕ ϕ α ϕ θ
gRm M R M
R M mmRmR Rm
0sin)()sin()cos()2
3
(
22
=+−+−+++ α ϕ α ϕ ϕ ϕ α θ g M mmRmR R M m
olarak hesaplanır. Sarkacın ϕ koordinatına göre olan Lagrange denklemi de;
0)( =∂
∂−
∂
∂
ϕ ϕ
L L
dt
d
dan
0)sin())cos(22
12
2
1( 2 =−−++ ϕ ϕ α θ ϕ mg Rmm
dt
d
0sin)sin()cos(2 =++−++ ϕ ϕ α ϕ θ ϕ α θ ϕ mgmRmRm
olarak bulunur. Sistemin L p p H −+= ϕ θ ϕ θ Hamilton fonksiyonunu bulmak için;
θ θ ∂
∂=
L p ,
ϕ ϕ
∂
∂=
L p dan
θ θ ϕ α ϕ θ
θ θ ϕ α ϕ θ θ
222
222
2
1)cos(
24
12
2
1)cos(2
2
12
2
1
MR R M mR Rm
MR R M Rm Rm p
++++=
++++=
22
2
3)cos( R M mR Rm θ ϕ α ϕ θ +++= (1.4.12)
ϕ ϕ α θ ϕ 2
2
1)cos(2
2
1 2m Rm p ++=
ϕ ϕ α θ 2)cos( mmR ++= (1.4.13)
olup sistemin Hamilton fonksiyonu
)coscossin()cossin(
4
1
2
1])cos(2[
2
1
))cos(()2
3)cos((
22222222
222
ϕ α α θ α α θ
θ θ ϕ ϕ α ϕ θ θ
ϕ ϕ ϕ α θ θ θ ϕ α ϕ θ
−+−++−+
−−+++−
++++++=
R Rhmg R Rh Mg
MR R M R Rm
mmR R M mR Rm H
olup fonksiyonunda gerekli sadeleştirmeler yapılırsa
222222
2)cos(
4
3
2θ ϕ α ϕ θ θ θ m
mR R M Rm
H ++++=
)coscossin()cossin( ϕ α α θ α θ −+−++−+ R Rhmg R Rh Mg (1.4.14)
olarak bulunur.

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 37/52
27
Sistemin Hamilton fonksiyonu momentumlar cinsinden yazılmak istenirse (1.4.12) ve
(1.4.13) denklemlerinden θ veϕ çekilip (1.4.14) Hamilton fonksiyonunda yerine
yazılırsa,
22
23
)cos(
MRmR
mR p
+
+−=
ϕ ϕ θ θ
,
2)cos(
mmR
p
++=
ϕ α ϕ
ϕ ,
22
22
22
22
)
2
3
)cos((
4
3)
2
3
)cos((
2R
MRmR
mR p M R
MRmR
mR pm H
+
+−+
+
+−=
ϕ ϕ ϕ ϕ θ θ
)coscossin(
)cossin())cos((2
)cos()cos(
2
3)cos(
22
22
222
ϕ α α θ
α α θ ϕ α
ϕ α ϕ α
ϕ α ϕ
ϕ
ϕ θ
−+−+
+−+++
+
+++
+
+−+
R Rhmg
R Rh MgmmR
pm
mmR
p
MRmR
mR pmR
olup sadeleşmiş şekli
)coscossin(
)cossin())cos((2
)cos()cos()
2
3(
)cos(
)23(
))cos((
4
3
)23(
))cos((
2
2
2
22
2
22
2
ϕ α α θ
α α θ ϕ α
ϕ α ϕ α
ϕ α ϕ
ϕ α ϕ ϕ α ϕ
ϕ
ϕ θ
θ θ
−+−+
+−+++
+
+++
+
+−+
+
+−+
+
+−=
R Rhmg
R Rh Mg R
p
l Rl
p
M m R
mR p
M m R
mR p M
M m R
mR pm H
olarak bulunur.
Buradan Hamilton denklemlerini
1)θ
θ p
H
∂
∂= ,
θ θ
∂
∂−=
H p
ve

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 38/52
28
2)ϕ
ϕ p
H
∂
∂= ,
ϕ ϕ
∂
∂−=
H p
olup aşağıdaki gibi hesaplanır.
1)
)23()
23(
))cos((2
4
3
)23(
))cos((2
2 2222 M m R M m R
mR p M
M m R
mR pm
+
+
+
+−+
+
+−=
ϕ α ϕ ϕ ϕ θ θ θ
)2
3()
2
3(
))cos((2
2
3
)2
3(
))cos((
2222 M m R M m R
mR p M
M m R
mR pm
+
+
+
+−+
+
+−=
ϕ ϕ ϕ α ϕ θ θ ,
α α α θ
sin)()sinsin( gRm M mgR MgR p +=−−−= ,
2)
))cos((2
2
2)cos(
)cos(2
++
+
++
+=
ϕ α ϕ α
ϕ α ϕ
ϕ
R
p
R
))cos((2)cos(
)cos(2
+++
++
+=
ϕ α ϕ α
ϕ α ϕ
R
p
R
))sin()cossinsincos(( ϕ ϕ ϕ α ϕ ϕ α ϕ ϕ θ ϕ mgmRP −−−−= .
Sonuç 1.5 Bu bölümde; reel Lagrange ve Hamilton sistemleri tanımlanarak değişik
örneklerle altı beslendi. Gelecek bölümde ise kompleks Hamilton sistemler
irdelenecektir.

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 39/52
29
2 KOMPLEKS HAMILTON SSTEMLER
Bu bölümde, reel uzayda yapılan Lagrange ve Hamilton sistemler ile ilgili bazı
çalışmaların kompleks versiyonları Mapple bilgisayar programı yardımıyla elde
edilecektir. Kompleks kinetik ve potansiyel enerji, kompleks Lagrange ve Hamilton
fonksiyonları verilerek kompleks Lagrange ve Hamilton denklemleri ifade edilecektir.
Tanım 2.1: 2 n -reel boyutlu bir M manifoldu üzerinde kompleks koordinatlar ( ii z z , ),
ni ≤≤1 ve im , M manifoldu üzerinde m parçacıklı bir sistemin kütlesi olmak üzere
22 )(2
1)(
2
1 i
i
i
i zm zmT ==
ile verilen
C M T →:
dönüşümüne sistemin kinetik enerjisi denir (Tekkoyun 2002).
Tanım 2.2: 2 n -reel boyutlu bir M manifoldu üzerinde kompleks koordinatlar ( ii z z , ),
ni ≤≤1 ve im , M manifoldu üzerinde m parçacıklı bir sistemin kütlesi g , yerçekimiivmesi ve h , sistemin orijine olan uzaklığı olmak üzere
ghmV i
=
ile verilen
C M V →:
dönüşümüne sistemin potansiyel enerjisi denir (Tekkoyun 2002).
Sistemin kompleks anlamdaki Lagrange fonksiyonu;
ghm zm
V T L
i
i
i−=
−=
2)(2
1
Hamilton fonksiyonu

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 40/52
30
),,(),,( t z z L z zt z z H iii
ii
i −=
olup denklemleri sırasıyla
z
L
z
L
t i L
∂
∂=
∂
∂
∂
∂= )(1 ,
z
L
z
L
t i L
∂
∂−=
∂
∂
∂
∂= )(2
z
H i
t
z H
∂
∂−=
∂
∂=1 ,
z
H i
t
z H
∂
∂=
∂
∂=2
şeklindedir (Tekkoyun 2002).
Örnek 2.1 Sabit bir kütle-çekim alanında bulunan m kütleli bir cismin üzerine, şekil
2.1.1 de görüldüğü gibi büyüklüğü 1)( −= α ρ ρ A f ( 1,0≠α ) olan ve kuvvet merkezi
orijinde bulunan, bir merkezcil kuvvet alanı etki ediyor. Cismin devamlı aynı düşey
düzlem içinde kaldığını kabul ederek, kompleks Lagrange ve kompleks Hamilton
hareket denklemlerini bulunuz (Rızaoğlu 2002).
Şekil 2.1.1 Kütlesi m olan cisim ve üzerine etki eden kuvvetler
Çözüm: Kinetik enerji; 2
2
1vmT
= idi. Hızı elde edebilmek için m kütleli cismin
konum vektörlerinin zamana göre birinci türevleri alınır. O halde kinetik enerji
aşağıdaki şekilde yazılır.
)(2
1)(
2
1 2222 y xmvvmT y x +=+= .
y
x
f
ϕ
ρ
m

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 41/52
31
ϕ ρ cos= x ve, ϕ ρ sin= y olup
ϕ ϕ ρ ϕ ρ sincos −= x ve ϕ ϕ ρ ϕ ρ cossin += y
şeklinde hesaplanır.
ϕ ϕ ρ ϕ ϕ ϕ ρ ρ ϕ ρ
ϕ ϕ ρ ϕ ϕ ϕ ρ ρ ϕ ρ
222222
222222
cos.sincos2sin
sin.sincos2cos
++=
+−=
y
x
olup bu eşitlikleri taraf tarafa toplanırsa
22222 ϕ ρ ρ +=+ y x şeklinde bulunur. O halde kinetik enerji
)(2
1 222 ϕ ρ ρ += mT (2.1)
olarak yazılır.
)sin(cos ϕ ϕ ρ i z += ve z nin eşleniği )sin(cos ϕ ϕ ρ i z −= şeklindeki gösterim
kutupsal gösterim olup buradaki ρ ve ϕ zamana bağlı değişkenlerdir, yani )(t ρ ρ = ,
)(t ϕ ϕ = dir.
Bu eşitliklerden faydalanarak ρ ve ϕ çekilirse
ϕ ϕ ρ 222 sin(cos += z z ),
2 ρ = z z , olup
ρ = z z (2.2)
ve
)sin(cos
)sin(cos
ϕ ϕ ρ
ϕ ϕ ρ
i
i
z
z
−
+= ,
z )sin(cos ϕ ϕ i− = )sin(cos ϕ ϕ i z + ,
ϕ ϕ ϕ ϕ sincossincos zi ziz z +=− ,
)(cos
)(sin
)(cos
)(cos
z zi
z zi
z zi
z z
+
+=
+
−
ϕ
ϕ
ϕ
ϕ ,
ϕ tan)(
)(1=
+
−
z z
z z
iolup

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 42/52
32
)](1
arctan[ z z
z z
i +
−=ϕ (2.3)
olur. Buradan (2.2) ve (2.3) ile elde edilen ρ ve ϕ nin zamana göre birinci türevleri
alınıp (2.1) de yerine yazılırsa
z z z z z z
z z z z
22)( +=′= ρ ,
,2
)(1
22
221
))((
)(1
)(
)()(
)(
))(())((1
)(1
)(1
2
22
2
2
z z
z z z z
i z z
z z z z
i
z z z z z z z z
z z z z z z z z z z z z z z z zi
z z
z z z z
z z
z z z z z z z z
i
z z
z z z z
z z
i
−=
−=
+−+−++
++−−−−+=
+
−−+
+
+−−+−
=
+
−−
′+
−
=ϕ
z zm z z
z z z zm
z z
z z z z z z z z z z z z z z z zm
z z
z z z z
z z
z z z zm
z z
z z z z
i z z
z z
z z z zmT
21)
4)2)(2((
21
)4
))(((
2
1
)4
)(
4
)((
2
1
))2
1()
2((
2
1
22
22
==
+−+−++=
−−
+=
−+
+=
olur.
Sistemin potansiyel enerjisi
))(1
(sin(arctan z z
z z
i z zmg z z
AV
+
−+=
α
α
olarak hesaplanır.
z z; nin zamana göre birinci türevi, ; z z nin zamana göre ikinci türevi, ; z z nin
eşleniği olmak üzere sistemin Lagrange fonksiyonu;
)))(
(sin(arctan)(2
12
z z
z zi z zmg z z
A z zm L
+
−−−−=
α
α
veya

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 43/52
33
2
2
2
1
)(
)(1)(
)()(
2
1
z z
z z z z
z z z zimg z z A z zm L
+
−−+
−+−=
α
α
bulunur.
z
L
z
L
t i L
∂∂=
∂∂
∂∂= )(:1 den
2 / 3
2
2
3
2
2
2
22
2
2
2
2
2
1
2 / 32
2
3
2
2
2
22
2
2
2
2
2
1
)
)(
)(1)((
))(
)(2
)(
)(2)((
2
1
)(
)(1)(
)(
)(
)(1)(
)(
)(1)(
)(2
1
2
)(
))
))()(1)((
))(
)(
)(
)(2)((
2
1
)()(1)(
)(
)(
)(1)(
)(
)(1)(
)(i2
1
2
)(((:1
z z
z z z z
z z
z z
z z
z z z z z zimg
z z
z z z z
z z z zimg
z z
z z z z
z zimg
z z
z z z z z z
z z zimg
z
z z A
z z z z z z
z z
z z
z z
z z z z z zimg
z z z z z z
z z z zimg
z z
z z z z
z zimg
z z
z z z z z z
z z zmg
z
z z A
t i L
+
−−+
+
−+
+
−−−
−
+
−−+
−−
+
−−+
+
+
−−+
−+−=
+−−+
+
−+
+
−−−
+−−+
−−
+
−−+
+
+
−−+
−+−
∂
∂=
α
α
şeklinde bulunur.
z
L
z
L
t i L
∂
∂−=
∂
∂
∂
∂= )(:2 denkleminden
zm zmt
i L
2
1))
2
1((2 −=
∂
∂= olarak hesaplanır.
Sistemin L z p z p H z z −+= Hamilton fonksiyonunu yazabilmek için
z
L p
z∂
∂= olup zm p
z
2
1=
ve
z
L p z ∂
∂= olup zm p z
2
1=

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 44/52
34
olmak üzere
))(sin(arctan2
12
z z
z zi z zmg z z
A z zm H
+
−−++=
α
α
veya
2
2
21
)(
)(1)(
)()(
2
1
z z
z z z z
z z z zimg z z A z zm H
+
−−+
−−+=
α
α
şeklinde hesaplanır. Hamilton denklemlerinden birincisine H1 ikincisine de H2
denilirse, H1 denklemi;
),
))(
)(1)((
))(
)(2
)(
)(2)((
2
1
)(
)(1)(
)(
)(
)(1)(
)(
)(1)(
)(2
1
2
)((:1
2 / 3
2
2
3
2
2
2
22
2
2
2
2
2
1
z z
z z z z
z z
z z
z z
z z z z z zimg
z z
z z z z
z z z zimg
z z
z z z z
z zimg
z z
z z z z z z
z z zimg
z
z z Ai
z
H i
t
z H
+
−−+
+
−+
+
−−
+
+
−−+
−+
+
−−+
+
+
−−+
−−−=
∂
∂−=
∂
∂=
α
H2 denklemi ise
z
H i
t
z H
∂
∂=
∂
∂=2
den
)
))(
)(1)((
))(
)(2
)(
)(2)((
2
1
)(
)(1)(
)(
)(
)(1)(
)(
)(1)(
)(2
1
2
)((:2
2 / 3
2
2
3
2
2
2
22
2
2
2
2
2
1
z z
z z z z
z z
z z
z z
z z z z z zimg
z z
z z z z
z z z zimg
z z
z z z z
z zimg
z z
z z z z z z
z z zimg
z
z z Ai z
t H
+
−−+
+
−+
+
−−−
+
+
−−+
−+
+
−−+
−
+
−−+
−−=
∂
∂=
α
şeklinde bulunur.
Örnek 2.2 Şekil 2.2.1’de görülen ve bağlantı noktası yukarıya doğru sabit bir a ivmesi
ile hareket eden; bir basit sarkacın küçük salınımlarının kompleks Lagrange ve
kompleks Hamilton fonksiyonlarını yazıp hareket denklemlerini elde ediniz (Rızaoğlu
2002).

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 45/52
35
Şekil 2.2.1 Bağlantı noktası yukarıya doğru sabit bir a ivmesi ile hareket eden basit
sarkaç
Çözüm:
Kompleks düzlemdeki bir nokta iy x z += idi. Buradan θ sin= x ,
η θ −= cos y eşitlikleri yerine yazılırsa; )(cossin η θ θ −+= i z elde edilir. z ’nin
eşleniği; )(cossin η θ θ −−= i z olup z ile z taraf tarafa toplanırsa
θ sin2=+ z z ,
θ sin2
=+
z z,
)2
arcsin(
z z +=θ
elde edilir. Şimdi de η , z ve z cinsinden çekilirse
)(cossin η θ θ −+= i z idi;
η θ θ −=− cos)sin(1
zi
η −+
=+
− ))2
(cos(arcsin)))2
(sin(arcsin(1
z z z z z
i
η −=+
−+
− ))2
(cos(arcsin))2
((1
z z z z z
ibulunur.
y
x
θ
η
η θ −cos
θ cos
m
θ sin

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 46/52
36
Buradan )2
()2
(1 2 z z zi
z z +−+
+−=
η den
)2
()2
(1 2 z zi
z z −+
+−=
η
olarak hesaplanır. Şimdi de sırayla θ ve η nin zamana göre birinci türevleri alınıp
(1.4.1)’de yerine yazılırsa
22222 )(4
2
)(42
)2
(1
)2
())
2(arcsin(
z z
z z
z z
z z
z z
z z
z z
+−
+=
+−
+
=+
−
′+
=′+
=
θ
.)(42
))(()
2(
2)(42
))((24
1
)
2
(
)2
(12
))2
(()
2
(
22
22
2
2
2
z z
z z z z z zi
z z
z z z z z z
i
z z
z z
z zi
+−
++−
−=
+−
++−
+−
=
+−
′+
−+
−=
η
Kinetik enerji
)sin)
)(42
))((
2
)((
)(4
2
4
)()
))(4(4
)()(
)(4
)((
2
1
2222
2
22
22
22
22
θ
z z
z z z z z zi
z z
z z
z z
z z
z z z z
z z
z zmT
+−
++−
−
+−
++
−−
+−
+++
+−
+=
olarak bulunur.
Sistemin potansiyel enerjisi de
)cos( η θ −−= mgV den
)2
(
)2
()2
(1)2
(1(
))2
())2
(1)2
(cos(arcsin(
22
2
z zmgi
z zi
z z z zmg
z zi
z z z zmgV
−=
−−
+−−
+−−=
−−
+−−
+−=
olup sistemin V T L −= Lagrange fonksiyonu;

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 47/52
37
)(2
1)
)(4
))(4
))(()()()(sin(
)(4
1
)(416
)()(
)(4
)((
2
1
22
22
2
22
22
22
22
z zimg
z z
z z
z z z z z zi z z
z z z z
z z z z
z z
z zm L
−−
+−
+−
++−−+
+
−−+−
+++
+−
+=
θ
elde edilir.
Lagrange denklemlerine sırasıyla L1 ve L2 denirse
z
L
z
L
t i L
∂
∂=
∂
∂
∂
∂= )(:1 ;
z
L
z
L
t i L
∂
∂−=
∂
∂
∂
∂= )(:2 den
img z z
z z
z z z z z z
z z
z z z zi z z
z z
z z z z
z z z z z zi z z
z z
z z z z z z
z z
z z z z
z z
z z z zm
img z z
z z
z z z z z z
z z
z z z zi z z
z z
z z z z
z z z z z zi z z
z z
z z z z z z
z z
z z z z
z z
z z z zm
t i L
2
1)
)(4
)))(4(2
)22)()((
)(4
)()(()()(sin(
))(4(2
)22)()(4
))(()()()(sin(
))(416(
)88()()(
)(416
))((2
))(4(
)22()((
2
1
))2
1)
)(4
)))(4(2
)22)()((
)(4
)()(()()(sin(
))(4(2
)22)()(4))(()()()(sin(
))(416(
)88()()(
)(416
))((2
))(4(
)22()((
2
1((:1
22
2 / 32222
2 / 322
22
222
22
22
2
222
22
22
2 / 32222
2 / 322
22
222
22
22
2
222
2
−+−
+−
−−+++
+−
−−−+
+
+−
−−+−
++−−+
−
+−
−−++−
+−
+++
+−
−−+−=
−+−
+−
−−+++
+−
−−−+
+
+−
−−+−
++−−+
−+−
−−++−
+−
+++
+−
−−+−
∂
∂=
θ
θ
θ
θ
ve
))))(4
))(4
)()()(sin(
)(4
))(4
))(()()(sin(
2
1
2
1
)(416
)()(2
)(4
)(2(
2
1((:2
22
22
22
22
22
2
22
2
z z
z z
z z z z
z z
z z
z z z z z z
z z
z z
z z z z
z z
z zm
t
i L
+−
+−
+−+
++−
+−
++−−
+
+−
+−
+++
+−
+
∂
∂=
θ θ

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 48/52
38
)
)(4
))(4
)()()(sin(
)(4
))(4
))(()()(sin(
2
1
2
1
)(416
)()(2
)(4
)(2(
2
1
22
22
22
22
22
2
22
2
z z
z z
z z z z
z z
z z
z z z z z z
z z z z
z z z z
z z
z zm
+−
+−
+−+
+
+−
+−
++−−
+
+−+−
+++
+−
+−=
θ θ
olarak bulunur.
Hamilton fonksiyonu;
L z p z p H z z −+= olup
z
L p z
∂
∂= ve
z
L p z ∂
∂= için
))sin()(4
))(22()sin(
)(4
2
4
22
))(4(4
)22()(
)(4
)22((2
1
2222
22
2
22
2
θ θ z z
z z z z
z z
zi
z z
z z
z z z z
z z
z z
m z
L
p z
+−
++−
+−+
−−+−
++++−
+=∂
∂=
ve
))sin()(4
))(22()sin(
)(4
2
4
22
))(4(4
)22()(
)(4
)22((
2
1
2222
22
2
22
2
θ θ z z
z z z z
z z
zi
z z
z z
z z z z
z z
z zm p
z
+−
++−
+−
−+
+−−
+−
+++
+−
+=
olarak hesaplanırsa
)(2
1)
)(4
sin)(
)(4
)(sin
)(41
)(416)()(
)(4)((
21
))(4
))((sin
)(4
sin
4
1
4
1
)(416
)()(
)(4
)(()
)(4
))((sin
)(4
)sin(
4
1
4
1
)(416
)()(
)(4
)((:
22
2
22
22
222
22
22
22
222222
2
22
2
2222
22
2
22
2
z zimg z z
z z
z z
z zi
z z z z z z z z
z z z zm
z z
z z z z
z z
zi z z
z z
z z z z
z z
z z zm
z z
z z z z
z z
zi
z z z z
z z z z
z z
z z zm H
−++−
+−
+−
−+
+++−+++
+−+−
+−
++−
+−−+−
+−
+++
+−
++
+−
++−
+−+
+−+−
+++
+−
+=
θ θ
θ θ
θ θ
bulunur. Hamilton denklemi H1 ve H2, sırasıyla

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 49/52
39
),
2
1)
))(4(
)22)(sin()(
))(4(
)22)(sin()(2
1
))(416(
)88)(()(
)(416
))((2
))(4(
)22()((
2
1
))(4(
)22)()()(sin(
)(4
))(sin(
))(4(
)22()sin(2
1
))(416(
)88)(()(
)(416
))((2
))(4(
)22)(((
)))(4(
)22)()()(sin(
)(4
))(sin(
))(4(
)22()sin(2
1
))(416(
)88)(()(
)(416
))((2
))(4(
)22)((((
:1
2 / 322
2
2 / 322
22
222
2
22
2
222
22
222222 / 322
222
2
22222
2
222222 / 322
222
2
22222
2
img
z z
z z z z
z z
z z z zi
z z
z z z z z z
z z
z z z z
z z
z z z zm
z z
z z z z z z
z z
z z
z z
z z zi
z z
z z z z z z
z z
z z z z
z z
z z z z zm
z z
z z z z z z
z z
z z
z zl
z z zi
z z
z z z z z z
z z
z z z z
z z
z z z z zmi
z
H i
t
z H
−
+−
−−−+
+−
−−−−
+−
−−++−
+−
+++
+−
−−+−−
+−
−−+++
+−
+−
+−
−−+
+−
−−++−
+−
+++
+−
−−+−+
+−
−−++
++−
+
−+−
−−
−
+−
−−++−
+−
+++
+−
−−+−−=
∂
∂−=
∂
∂=
θ θ
θ θ θ
θ θ θ
)2
1)
))(4(
)22)(sin()(
))(4(
)22)(sin()(2
1
))(416(
)88)(()(
)(416
))((2
))(4(
)22()((
2
1
))(4(
)22)()()(sin(
)(4
))(sin(
))(4(
)22()sin(2
1))(416(
)88)(()(
)(416
))((2
))(4(
)22)(((
)))(4(
)22)()()(sin(
)(4
))(sin(
))(4(
)22()sin(2
1
))(416(
)88)(()(
)(416
))((2
))(4(
)22)((((
:2
222
2
2 / 322
22
222
2
22
2
222
22
222222 / 322
222
2
22222
2
222222 / 322
222
2
22222
2
img z z
z z z z
z z
z z z zi
z z
z z z z z z
z z
z z z z
z z
z z z zm
z z
z z z z z z
z z
z z
z z
z z zi
z z
z z z z z z
z z
z z z z
z z
z z z z zm
z z
z z z z z z
z z
z z
z z
z z zi
z z
z z z z z z
z z
z z z z
z z
z z z z zmi
z
H i
t
z H
++−
−−−+
+−
−−−−
+−
−−++−
+−
+++
+−
−−+−−
+−
−−+++
+−
+−
+−
−−+
+−
−−++−
+−
+++
+−
−−+−+
+−
−−+++
+−
+−
+−
−−−
+−
−−++−
+−
+++
+−
−−+−=
∂
∂=
∂
∂=
θ θ
θ θ θ
θ θ θ
elde edilir.
Sonuç 2.1 Bu bölümde Maple programı kullanılarak kompleks Hamilton denklemlerine
örnekler verilmiştir.

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 50/52
40
3 SONUÇ VE ÖNERLER
Bu çalışmada çıkarılan denklemlerin ışığı altında genelleştirilmiş klasik mekanik
ve alan teorisinde Hamilton formalizmi, kompleks uzaylarda karakterize edilmiş ve
ilgili uygulamalara yer verilmiştir.
Elde edilen bu denklemler nümerik ve analitik olarak temsil edeceği ortamlar
göz önünde tutularak çözülebilir. Aynı zamanda, elde edilen kompleks Lagrange ve
Hamilton denklemleri kuantum mekaniğinin muhtemel yeni formalizmine taşınabilir.

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 51/52
41
KAYNAKLAR
Chang, Y. F., Tabor, M., Weiss, J. (1981) Analytic Structure of the Henon-HeilesHamiltonian in Integrable and Nonintegrable Regimes. J.Math. Phys., 23(4):531-538.
Civelek, Ş. (1996) The Lifts of Lagrange and Hamilton Equations to the ExtendedVector Bundles, Manisa, Türkiye, Mathematical & Computational
Applications, 1.1: 21-28.
De Leon, M., Oubina, J. A., Rodrigues, P. R., Salgado, M. R., Merino, E. (2001)Hamiltonian Systems on k-Cosymplectic Manifolds, Project PB940106 andProject XUGA13101A94, Spain.
Kibble, T. W.B., Berkshire, F. H., (Çeviri Editörü) Çolakoğlu, K.(1999) KlasikMekanik, Palme Yayıncılık, Ankara, 361s.
Özer, M. N. (1994) Related Integrable Hamilton Systems, Doktora Tezi, The University of Leeds, England, 158s.
Rızaoğlu, E., Sünel, N. (2006) Klasik Mekanik, Seçkin Yayıncılık, Ankara, 570s.
Tekkoyun, M. (2002), Genişletilmiş Kahler Manifoldlara Euler-Lagrange veHamiltonDenklemlerin Yüksek Mertebeden Lift’leri, Doktora Tezi, OsmangaziÜniversitesi Fen Bilimleri Enstitüsü, Eskişehir, 71s.
Zabzine, M. (2005) Hamiltonian Perspective on Generalized Complex Structure, http:/arxiv.org/abs/hep-th/0502137 (15.02.2005).
Zengin, M., Selam, C., Korcak, S. (1999) Mekanik, Bilim Yayıncılık, Ankara, 291s.

5/17/2018 Hamilton Sistemler Hamilton Systems - slidepdf.com
http://slidepdf.com/reader/full/hamilton-sistemler-hamilton-systems 52/52
42
ÖZGEÇMŞ
27.07.1981 tarihinde Almanya’nın Nagold kasabasında doğdu. 1987-1992 yılları
arasında Denizli Hürriyet lkokulu’nda, 1992-1995 yılları arasında ise Denizli Merkez
Ortaokulu’nda okudu. 1995 yılında kazandığı Denizli Anafartalar Süper Lisesi’ne kayıt
oldu ve 1999’da mezun oldu. 2000 yılında kazandığı Eskişehir Osmangazi Üniversitesi
Fen-Edebiyat Fakültesi Matematik bölümünden 2004 yılında mezun oldu ve aynı yıl
Denizli Pamukkale Üniversitesi Fen Bilimleri Enstitüsü Matematik Anabilim dalında
Yüksek Lisansa başladı. 2004-2005 öğretim yılında Cankurtaran lköğretim Okulu’nda
sözleşmeli öğretmen olarak görev yaptı. Halen, özel bir dershanede matematik
öğretmeni olarak görev yapmaktadır.
Recommended