
LA ROBOTIQUE ADAPTEE
AU HANDICAP : DES
TÉLÉMANIPULATEURS AUX
EXOSQUELETTES
PHILIPPE GARREC
16 MAI 2013
Les Rencontres du Visiatome | Philippe Garrec
CEA | 18 OCTOBRE 2012 | PAGE 1
LES RENCONTRES DU VISIATOME

LE LABORATOIRE DE ROBOTIQUE
INTERACTIVE DU CEA
| PAGE 2
CEA | 18 OCTOBRE 2012

INTERACTIVE ROBOTICS LABORATORY
Remote Handling
1
Collaborative Robotics
2 Force feedback remote
handling
Long range inspection
Manipulation
3
Co Manipulation
Haptics
Exoskeletons
Autonomy
Trajectory control
Energy management
Dexterous manipulation
Task planning
Mobile Robotics
4
Les Rencontres du Visiatome | 16 MAI 2013 | PAGE 3
Team :
29 Permanent
8 PhD and 2 Post doc
10 fix term contracts
Resources :
30 Projects
40 % Industrials contracts
20 % Institutional Funding (ANR, Pôles compétitivité…)
20 % Europeans projects
20 % CEA Subvention
Scientific et technical Production
57 Active patents
10 Patent pending in 2012
5 Actives licenses : AREVA NC, Haption, Cybernetix, ATI, RB3D
8 to 10 publications, 20 to 30 communications by year
INTERACTIVE ROBOTICS LABORATORY
Les Rencontres du Visiatome | 16 MAI 2013 | PAGE 4

INTERACTIVE ROBOTICS LABORATORY
Les Rencontres du Visiatome | 16 MAI 2013 | PAGE 5
Bancs d’essais

1948-1980
L’ÉPOQUE DES PIONNIERS :
TÉLÉMANIPULATION, ROBOTIQUE ET
L’INVENTION DE LA TÉLÉROBOTIQUE
| PAGE 6
CEA | 18 OCTOBRE 2012
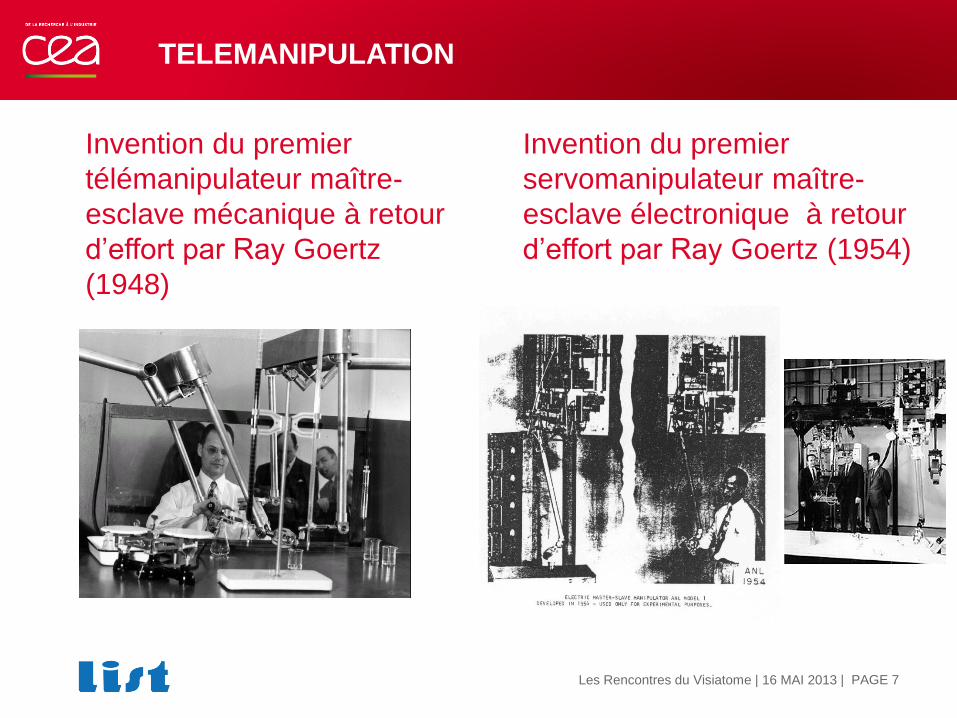
TELEMANIPULATION
Invention du premier
télémanipulateur maître-
esclave mécanique à retour
d’effort par Ray Goertz
(1948)
Les Rencontres du Visiatome | 16 MAI 2013 | PAGE 7
Invention du premier
servomanipulateur maître-
esclave électronique à retour
d’effort par Ray Goertz (1954)

TELEMANIPULATION MECANIQUE
| PAGE 8
Télémanipulateur maître-
esclave mécanique MA11
CEA-La Calhène (1966)
Dispositif original de décalage angulaire de
l’axe d’épaule esclave par rapport au maître
(augmentation du volume de travail) – Brevet
J. Vertut
Les Rencontres du Visiatome | 16 MAI 2013

TELEMANIPULATION
Qu’est-ce qu’un
télémanipulateur ?
| PAGE 9 Les Rencontres du Visiatome | 16 MAI 2013
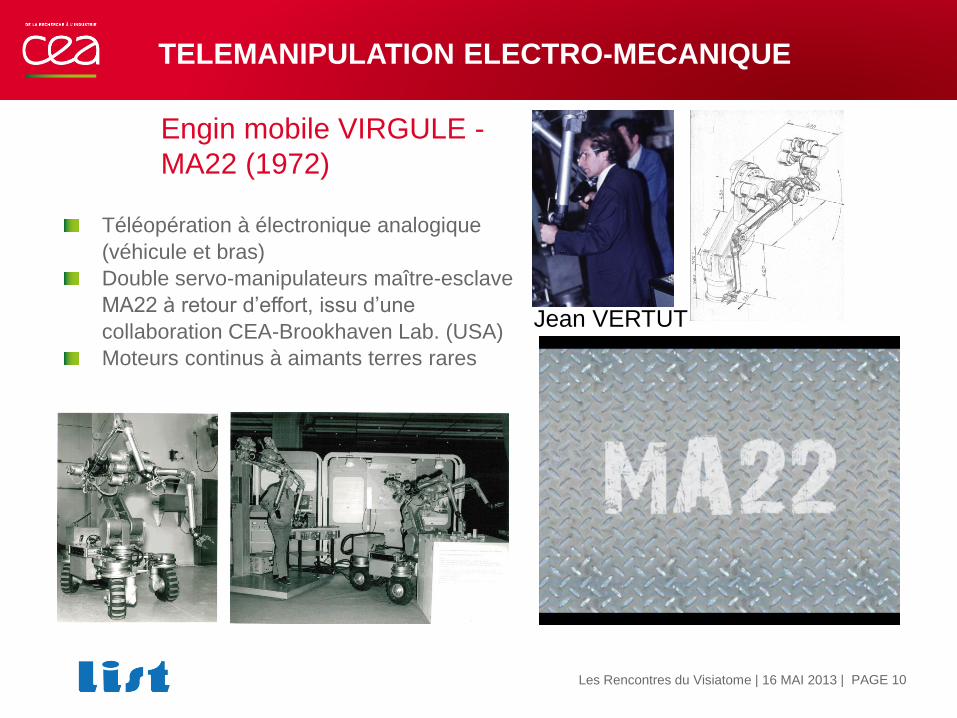
TELEMANIPULATION ELECTRO-MECANIQUE
Engin mobile VIRGULE -
MA22 (1972)
Téléopération à électronique analogique
(véhicule et bras)
Double servo-manipulateurs maître-esclave
MA22 à retour d’effort, issu d’une
collaboration CEA-Brookhaven Lab. (USA)
Moteurs continus à aimants terres rares
| PAGE 10
Pour insérer une image :
Menu « Insertion / Image »
ou
Cliquer sur l’icône de la zone
image
Jean VERTUT
Les Rencontres du Visiatome | 16 MAI 2013

TELEMANIPULATION ELECTRO-MECANIQUE
Servo-manipulateur maître-
esclave MA23 (1975)
Brevet CEA du MA23 incluant un dispositif
original d’amplification du couple par moufles
(1974)
Téléopération à électronique analogique
Adaptation à la Téléopération Assistée par
Ordinateur (>1980) – Logiciel TAO1 et 2
Nombreuses applications
expérience de démantèlement à l’atelier
AT-1 de COGEMA-Hague (AREVA NC)
soudure
Produit à environ 25 unités
Performances du bras maître toujours
d’actualité. Plusieurs unités utilisées au LRI
| PAGE 11
Pour insérer une image :
Menu « Insertion / Image »
ou
Cliquer sur l’icône de la zone
image

ROBOTIQUE MEDICALE – ASSISTANCE AU
HANDICAPÉ
| PAGE 12
Projet pilote SPARTACUS
(1975-1980) Une collaboration nationale de grande
envergure : INRIA-CEA-CNRS-INSERM
Un projet marquant au plan international
Téléopération uni-latérale (sans retour
d’effort) grâce à des capteurs de mouvement
de la tête
Coopération avec l’homme grâce à des
efforts maîtrisés par la conception de type
servo-manipulateur issue du MA23
Premier changeur de coordonnées temps
réel (MA-T1&MA23) ouvrant la voie à la
Téléopération Assistée par Ordinateur

UN PEU DE THEORIE…AVANT D’ALLER
PLUS LOIN
| PAGE 13
CEA | 18 OCTOBRE 2012

COMMANDE EN POSITION
(analogie avec un ressort de rappel)
COMMANDE EN FORCE
(analogie avec un contrepoids)
P
F=-P
Trajectoire libre
F=KP
Trajectoire programmée
Ecart de position P
Trajectoire réelle
DIFFÉRENTS PRINCIPES DE COMMANDE
14

MASTER ARM SLAVE ARM
Load
(weight, contact, etc.)
Sl
Operator
MlmM
mS
dS
m d
d m
S S S S
S M
T K
Position control
Controller
UNILATERAL COUPLING
BILATERAL COUPLING
MASTER ARM
Operator
SLAVE ARM
Load
(weight, contact, etc.)
SF
MF
mM
dM mS
dS
Position control
m d
d m
M M M M
M S
T K
m d
d m
S S S S
S M
T K
Position control
Controller
Sl
Ml
SF
Vision
(direct/indirect)
Vision
(direct/indirect)
TÉLÉMANIPULATION AVEC OU SANS RETOUR D’EFFORT
– COUPLAGE ELASTIQUE BI- OU UNI- LATÉRAL
Retour d’effort
Rappel moteur
Rappel moteur
Rappel moteur
15

1980
DEVELOPPEMENT DE LA
TELEOPERATION ASSISTEE PAR
ORDINATEUR ET DE LA
TELEROBOTIQUE POUR LES MILEUX
HOSTILES
| PAGE 16
CEA | 18 OCTOBRE 2012
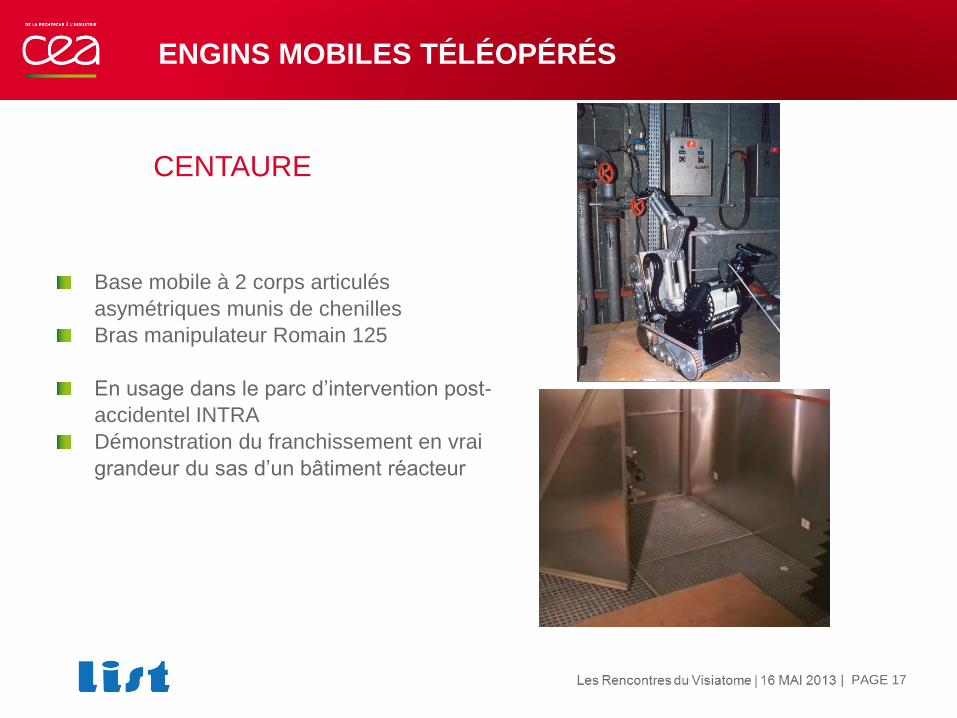
ENGINS MOBILES TÉLÉOPÉRÉS
| PAGE 17
CENTAURE
Base mobile à 2 corps articulés
asymétriques munis de chenilles
Bras manipulateur Romain 125
En usage dans le parc d’intervention post-
accidentel INTRA
Démonstration du franchissement en vrai
grandeur du sas d’un bâtiment réacteur

ENGINS MOBILES TÉLÉOPÉRÉS
| PAGE 18
Contribution à la création du parc d’intervention post-accidentel
GIE INTRA (1988)

ENGINS MOBILES TÉLÉOPÉRÉS
| PAGE 19
DACTARIX (1995)
Base mobile à roues téléopérée
Bras manipulateur Titan Shilling
Utilisé par CEA DAM pour la récupération
d’engins non explosés dans le cadre de leur
essais

ENGINS MOBILES
| PAGE 20
Programme TELEMAN
(EU)
TALOS
Engin multi-corps articulé
Prévu pour la locomotion en environnement
très contraint (bâtiments des centrales
nucléaires)
Version à 4 corps mue par des essieux tri-
roues (MESSINA)

ENGINS MOBILES
| PAGE 21
Programme TELEMAN
(EU) - SHERPA Engin de transport hexapode à jambes
télescopiques (origine Odex 3 – Odetics,
USA)
Développements de pieds tactiles
Développement de la commande de la
marche « tripode alterné »
Rotation angulaire, passage étroit, évitement
d’obstacles, rampe, escalier par la mise en
œuvre de fonctions réflexes
Première démonstration d’un robot
marcheur transporteur (200 kg) dans des
centrales nucléaires (y compris sur
escalier) en mode téléopéré (Chooz-B,
1993 et Trino, 1994)

ENGINS MOBILES
| PAGE 22
Projet SHERPA 2 (1994-1998)
Plateforme de transport hexapode d’une capacité
de 300 kg pouvant déployer un manipulateur dextre
à grande portée
Nouvelle technologie de jambe compacte et
modulaire
Bras porteur modulaire redondant (contournement
des obstacles)
Emport d’un outil de manipulation secondaire
Technologie en partie exploitée sur le robot de
maintenance de la chambre d’expérimentation du
LMJ

TÉLÉOPÉRATION MAÎTRE-ESCLAVE ASSISTÉE PAR
ORDINATEUR
| PAGE 23
Bras esclave RD500 à
retour d’effort
Construction étanche pour le travail en
piscine
Capacité de charge 500 N
Retour d’effort par capteurs de couple
Utilisé avec le logiciel prototype TAO
(assistance au suivi de trajectoires, de
surfaces)
Démonstration de travail sous eau
Démonstration de téléopération sur
environnement virtuel (vérifier Andriot)

TÉLÉOPÉRATION MAÎTRE-ESCLAVE ASSISTÉE
PAR ORDINATEUR
Le développement du logiciel TAO 2000 au
coeur des applications
Un bras maître banalisé et des bras esclaves diversifiés en fonction
des environnements et des tâches grâce au contrôle temps réel en
coordonnées Cartésiennes
De multiples fonctions d’assistance sophistiquées (mécanismes
virtuels, repères d’observation pour le confort visuel)
Plusieurs licenciés industriels ; une notoriété internationale
Une conception générique, archétype d’un futur standard
international (ISO TC85/SC2/WG 24 Remote
Handling/Telerobotics)
Master arm
and
standard
controller
TÉLÉOPÉRATION MAÎTRE-ESCLAVE ASSISTÉE PAR
ORDINATEUR
| PAGE 25
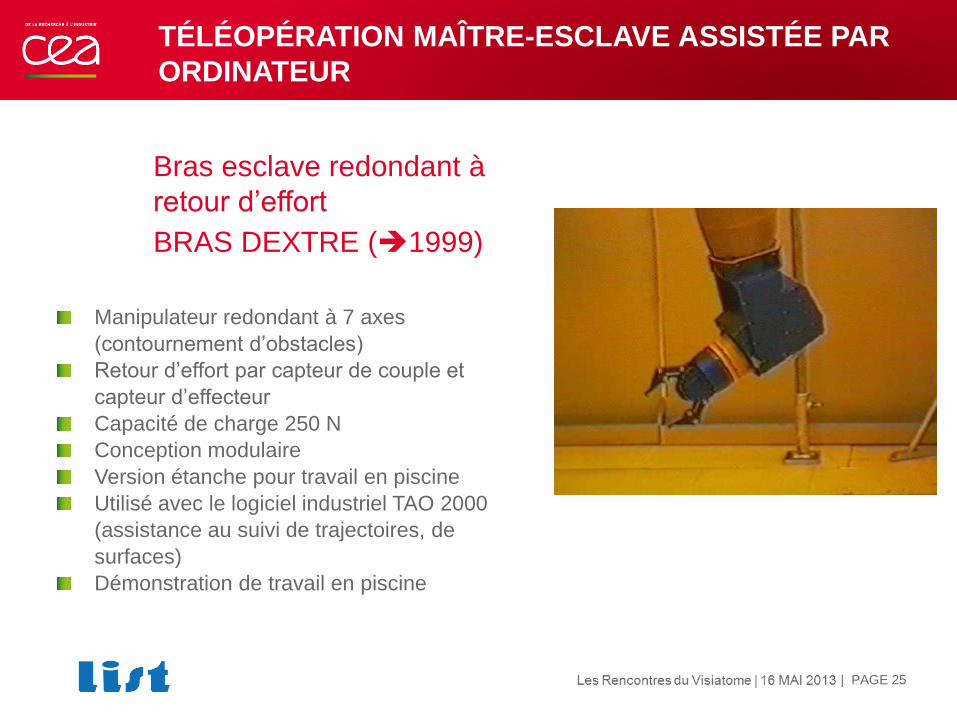
Bras esclave redondant à
retour d’effort
BRAS DEXTRE (1999)
Manipulateur redondant à 7 axes
(contournement d’obstacles)
Retour d’effort par capteur de couple et
capteur d’effecteur
Capacité de charge 250 N
Conception modulaire
Version étanche pour travail en piscine
Utilisé avec le logiciel industriel TAO 2000
(assistance au suivi de trajectoires, de
surfaces)
Démonstration de travail en piscine

TÉLÉOPÉRATION MAÎTRE-ESCLAVE ASSISTÉE PAR
ORDINATEUR
| PAGE 26
Bras esclave hydraulique à
retour d’effort
MAESTRO Issu d’une collaboration CEA-IFREMER-
CYBERNETIX
Retour d’effort de haute qualité grâce à des
algorithmes de commande spécifiques
Version avec contrôleur durci CBND
Utilisé avec le logiciel industriel TAO 2000
Intégré à l’atelier pilote de qualification du
démantèlement téléopéré (Marcoule)
Utilisation programmée sur plusieurs chantiers
de démantèlement (dont bâtiment 18 à FAR)
Commercialisé par CYBERNETIX

TÉLÉOPÉRATION MAÎTRE-ESCLAVE ASSISTÉE PAR
ORDINATEUR
| PAGE 27
Famille de bras maître à
retour d’effort
VIRTUOSE 6D Version téléopération remplaçant le bras
maître MA23 (2001)
Premier bras actionné par vérins à câbles
Utilisé à l’usine de la Hague (RX TAO et
MT200 TAO)
Version haptique destinée à la simulation
interactive (2002)
Actionné par cabestan et réducteur
Harmonic Drive
Vendu dans de nombreux pays
Equipe des industriels majeurs
Gamme complète commercialisée par
HAPTION (une spinoff du CEA)

TÉLÉOPÉRATION MAÎTRE-ESCLAVE ASSISTÉE PAR
ORDINATEUR
| PAGE 28
Famille de bras esclave
industriel à retour d’effort
RX Stäubli TAO
Une collaboration à long terme entre CEA et
AREVA NC Hague
Manipulateur industriel standard
Retour d’effort par capteur d’effort d’effecteur
« durci »
Réducteur d’ombilic par multiplexeur durci
(ROC)
Utilisé avec le logiciel industriel TAO 2000
(assistance au suivi de trajectoires, de
surfaces, mode « robot »)
RX 170 a réalisé, à partir de 2005, le
remplacement des galets sur 3 roues de
dissolveurs à l’usine de AREVA Hague
Versions RX130 et RX 170 industrialisées
par AREVA MECACHIMIE

TÉLÉOPÉRATION MAÎTRE-ESCLAVE ASSISTÉE PAR
ORDINATEUR
| PAGE 29
MT200 TAO
Une collaboration à long terme entre CEA et AREVA NC
Hague
Système remplaçant la partie maître du télémanipulateur
mécanique télescopique de paroi MT200 et le transformant
en un télérobot
Bloc moteur esclave déconnectable à très haute réversibilité
et à refroidissement forcé
Bras maître Virtuose 6D
Utilisé avec le logiciel industriel TAO 2000 (assistance au
suivi de trajectoires, de surfaces, mode « robot »)
Campagne de validation de 10 mois en usage permanent
sur la cellule chaude de vitrification R7
Approbation du système par la majorité des pilotes de
l’usine
En cours d’industrialisation par Getinge-La Calhène
Premier système de TAO remplaçant les fonctions d’un
télémanipulateur mécanique télescopique en usage
quotidien

TÉLÉOPÉRATION MAÎTRE-ESCLAVE ASSISTÉE PAR
ORDINATEUR
| PAGE 30
Téléopération augmentée
(supervisée) par un modèle
virtuel
Projet TELEMACH
(téléopération sur un
tunnelier)
Collaboration avec Bouygues TP
Exploitation de la simulation interactive dans
un contexte de TAO

| PAGE 31
Au cœur de la télérobotique
nucléaire : l’électronique
durcie
Une technologie présentant de nombreux
challenges en terme de modélisation de l’effet
des radiations sur les composants
Un mix de protection et de sélection de
composants résistants grâce à des essais
d’irradiation
Des performances (104 Gy) maintenues grâce
à un effort de recherche permanent
(obsolescence des composants électroniques)
Une avance du CEA aujourd’hui
internationalement reconnue (engins mobiles
du parc INTRA, bras esclave industriel RX à
l’usine AREVA Hague, Bras hydraulique
Maestro)
Contexte porteur pour un élargissement du
champ d’application (démantèlement)
Outdoor Robot
Indoor Robot Indoor crane
Inspection Robot
Manipulateur
arm
Embedded electronics
modules

LES ROBOTS MANIPULATEURS À
GRAND ÉLANCEMENT – APPLICATION
À LA MAINTENANCE DES GRANDS
INSTRUMENTS DE RECHERCHE
| PAGE 32
CEA | 18 OCTOBRE 2012
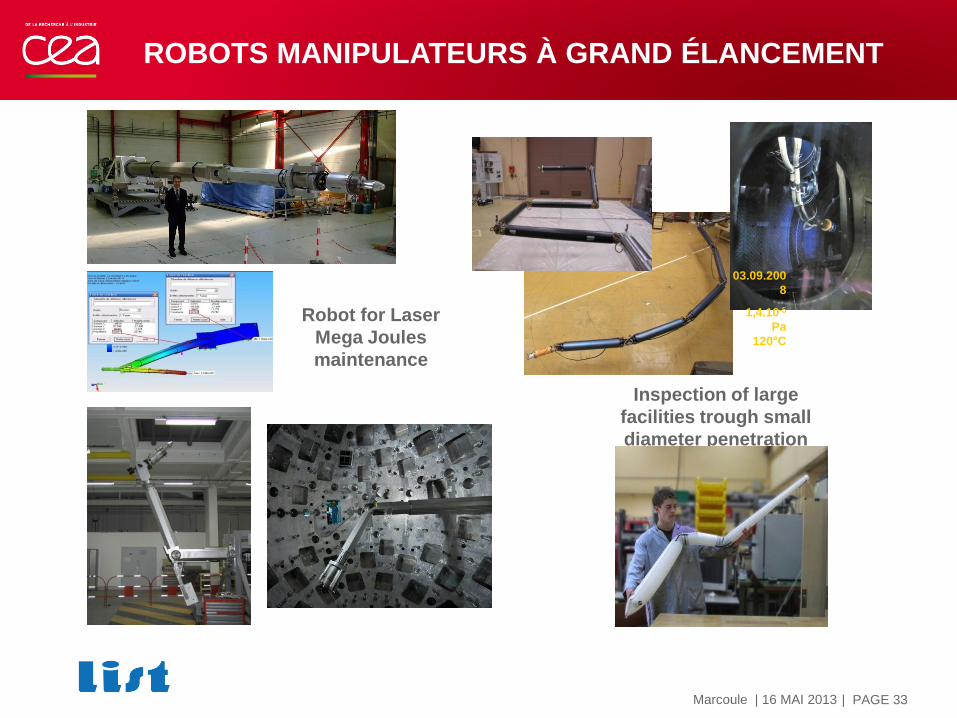
ROBOTS MANIPULATEURS À GRAND ÉLANCEMENT
Robot for Laser
Mega Joules
maintenance
Inspection of large
facilities trough small
diameter penetration
holes
03.09.200
8
1,4.10-5
Pa
120°C
Marcoule | 16 MAI 2013 | PAGE 33

ROBOTS MANIPULATEURS À GRAND ÉLANCEMENT
Marcoule | 16 MAI 2013 | PAGE 34
Porteur articulé AIA
Essai réel TORE SUPRA (2008)

Marcoule | 16 MAI 2013 | PAGE 35
ROBOTS MANIPULATEURS À GRAND ÉLANCEMENT
Robot de maintenance de la chambre d’expérimentation du Laser Mega Joule
Pose automatique des panneaux dans la chambre du LMJ (2012)
Conception de base CEA LIST (2004) Recette (2011)
ROBOTIQUE MEDICALE
| PAGE 37
CEA | 18 OCTOBRE 2012

Mini-invasive surgical devices Minimally invasive robotized
instruments
Rehabilitation devices Exoskeleton, Haptic reeducation
device
Medical staff support devices Positioning robot for protontherapy
Mobile imaging device Personal assistance devices Autonomous mobile robot
Hand and arm for manipulation
Gesture training platform Surgical gesture training
Surgical collaborative devices Maxillofacial and orthopedic
surgery
DOMAINES DE RECHERCHE COUVERTS EN
ROBOTIQUE MEDICALE
| PAGE 38
ROBOTIQUE MEDICALE – ASSISTANCE AU
HANDICAPÉ
| PAGE 39
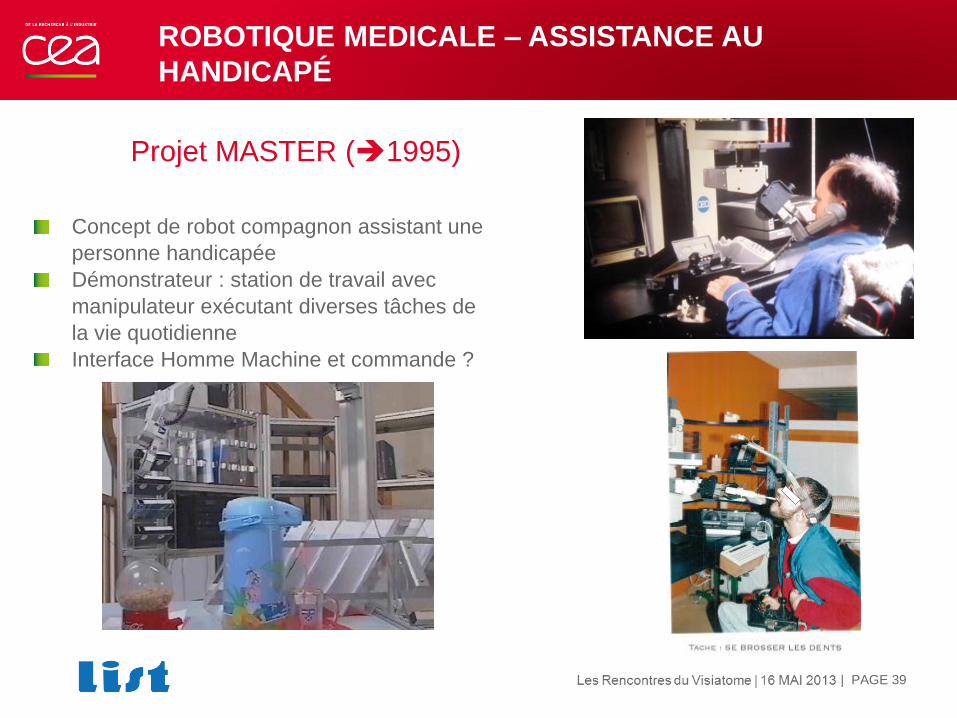
Projet MASTER (1995)
Concept de robot compagnon assistant une
personne handicapée
Démonstrateur : station de travail avec
manipulateur exécutant diverses tâches de
la vie quotidienne
Interface Homme Machine et commande ?

Objectifs
Développement d’assistances robotiques physiques et logicielles pour
compenser la perte d’autonomie
Saisie automatique d’objets inconnus (Projets : ITEA Anso et Midas)
Développement d’IHM intuitives (one click)
Développement d’une fonction d’identification d’objet dans les images par vision
Planification de tâches et réaction à des évènements imprévus
ASSISTANTS ROBOTIQUES POUR PERSONNE
HANDICAPÉE
| PAGE 40

CHIRURGIE MINI INVASIVE : ORGANES MAITRES
Objectifs
Interfaces haptiques à retour d’effort pour la télé-chirurgie et la formation
Bras maitre de commande (Projet RNTS EndoXiRob)
Piloter un robot porte endoscope et des instruments de chirurgie mini-invasive
Plate forme multimodale de formation à la chirurgie maxilo-faciale
en RV (Projet FP7 Skills)
Développement et intégration d’un prototype complet: haptique (2 bras), visuel (écran 3D avec
Mocap de la tête de l’utilisateur), sonore, tactile
Développement d’un logiciel de simulation de chirurgie osseuse
Développement de premiers exercices de formation et IHM dédiée
Partenaires
Haption, APHP La pitié Salpêtrière, CHU Amiens, Rouen, Nantes
| PAGE 41

CHIRURGIE MINI INVASIVE : INSTRUMENTS INTRA
CORPORELS
Objectifs
Nouveaux instruments pour la chirurgie mini-invasive MIS, SILS, NOTES (<5mm)
Instruments dextres robotisés pour la laparoscopie
(Projets : ANR ID2U, ITEA Mediate)
Outil endoscopique porte-aiguille motorisé, partiellement jetable
Instrument miniature (trocart Ø=5mm) basé sur les technologies d’articulations flexibles, à
actionnement partiellement localisé pour une meilleure dextérité
Instrument de chirurgie intracardiaque sous imagerie
échographique ou RX (Projet AS2coeur)
Mise en place d’un cordage valvulaire artificiel (valve mitrale) à cœur battant
| PAGE 42

CHIRURGIE MINI INVASIVE : INSTRUMENTS INTRA
CORPORELS
Instrument de suture semi-automatique pour vaisseaux
(Projet MISS)
Réalisation d’anastomoses latéro-latérales pour le pontage coronarien mini-invasif
et à cœur battant (validation du concept à l’échelle 8:1)
Objectif 3
.
EndoControl, Cédrat Technologies, Fraunhofer Institut IPA, UPMC ISIR, APHP La
Pitié Salpétrière, Institut Mutualiste Montsouris
| PAGE 43

COBOTIQUE : CHIRURGIE ORTHOPEDIQUE
SURGICOBOT
La laminectomie :
Un nombre d’actes en augmentation corrélé avec le
vieillissement de la population
Un taux de complications élevé (~10%)
Comment rendre la laminectomie plus sûre, plus
simple, plus rapide
Solutions explorées dans ANR Surgicobot
Visualiser en 3D l’os en cours de fraisage
Protéger physiquement la moelle épinière
| PAGE 44
Pitié Salpétrière
Hôpital

COBOTIQUE : CHIRURGIE ORTHOPEDIQUE
SURGICOBOT
Un cobot (robot comanipulateur)
Comanipule l’outil avec le chirurgien
Est complètement transparent la plupart du temps
Exerce si nécessaire des contraintes actives sur l’outil
Caractéristiques mécaniques (usinage os)
F=40N, K=40N/mm
Intérêt : Le chirurgien
Conserve la vision directe
Conserve ses sensations habituelles
Conserve le pouvoir de décision
| PAGE 45
Un système cobotique pour sécuriser l’opération
intègre trois composants principaux

COBOTIQUE : CHIRURGIE ORTHOPEDIQUE
SURGICOBOT
Un système de navigation précis et rapide
Localise en temps réel outil, robot et vertèbre
Composé de camera à 3 barrettes CCD rapides et n x 4 cibles actives
sans fil à diodes infrarouge formant un référentiel rigide
Précision : 0.2mm à 250Hz pour 8 diodes dans un volume de 1m3
| PAGE 46
Un système cobotique pour sécuriser l’opération
intègre trois composants principaux

COBOTIQUE : CHIRURGIE ORTHOPEDIQUE
SURGICOBOT
Une interface interactive
conviviale et un PC
Scénarisent le processus complet
Effectuent l’ensemble des calculs
géométriques
Visualisent en 3D multivues l’opération en
cours
| PAGE 47
Un système cobotique pour sécuriser l’opération
intègre trois composants principaux

COBOTIQUE : CHIRURGIE ORTHOPEDIQUE
SURGICOBOT
Les fonctions apportées par le
système
Visualisation 3D de la zone opératoire
Protection de zones d’exclusion par effort de
répulsion ou de blocage
Compensation des mouvements du patient
(déplacements, respiration)
Guidage de l’outil, suppression de son poids,
des frottements
Ergonomie
| PAGE 48
Première prise en main
Le système a été jugé efficace, « transparent » et convivial
Les tâches supplémentaires (recalage, calibration) sont
simples et rapides à réaliser

ROBOTS DE POSITIONNEMENT EN RADIOTHÉRAPIE
INTERVENTIONELLE
Objectifs
Lever les verrous techniques en matière de qualité de cinématique
et précision de positionnement
Imageur Robotisé pour Interventions mini-invasives
(Projet FUI Irimi)
Conception d’une base mobile holonome
Performances équivalente à un bras robotisé (0,5mm précision)
Solution innovante : Roue sphérique holonome,
Déplacement dans toutes les directions sans réorientation préalable
Petites corrections de position possibles
Capacité de franchissement isotrope
Simplification des trajectoires
GE Healthcare, BA Systèmes, IRCCYN
ball – O – nom Patent Pending FR 11 59013
| PAGE 49

ROBOTS DE POSITIONNEMENT EN RADIOTHÉRAPIE
INTERVENTIONELLE
Positionnement robotisé de patient (Projet ANR Poros )
Développement d’un robot pour remplacer les tables de radiothérapie
Grande dextérité (6 ddl), Précision de positionnement <0.5 mm en traitement,
Intégration au contrôle-commande de la salle de traitement
Adaptation possible à la radiothérapie dynamique, co-manipulation
.
AS2I, Dosisoft, ISIR, Institut Curie
| PAGE 50

LES DÉFIS DE LA COBOTIQUE (« COLLABORATIVE
ROBOTIQUE »)
| PAGE 51
Cobotique avec un bras industriel Stäubli RX 90 et la
problématique de la maîtrise de l’effort et de la
sécurité (2001)

LES DÉFIS DE LA COBOTIQUE
| PAGE 52
Cobotique avec des
manipulateurs spécialement
conçus : le cobot RB3D
A6.15
Fruit d’un partenariat RB3D (PME, leader),
et CEA
Eléments de sûreté intégrés à la conception
Produit aujourd’hui commercialisé pour le
rechapage de pneus et l’ébavurage

LES DÉFIS DE LA COBOTIQUE - VERS UN BRAS
ASSISTANT CAPABLE D’UNE MANIPULATION FINE
Projet ASSIST
| PAGE 53
Objectives:
Very Safe Light Weight Robot
Collaborative Robot (Workspace sharing)
Features:
Anthropomorphic kinematics (7dof)
Force / torque control without sensor
High fidelity actuators
Payload 3kg
Intuitive programming by learning
Safety:
Collision detection based on dynamic
model survey
LES DÉFIS DE LA COBOTIQUE VERS UN BRAS
ASSISTANT CAPABLE D’UNE MANIPULATION FINE
| PAGE 54
Les projets de mains ABILIS
(ANR) et HANDLE (EU)
Grand nombre d’axes d’articulation
Capteurs tactiles en extrémité de phalange
Actionnement par mini vérin à câbles
Electronique entièrement intégrée
Main ABILIS
Main HANDLE

EXOSQUELETTES : UNE FORME DE COBOT
ABLE 7D
Exosquelette du membre
supérieur à retour d’effort
| PAGE 55

ABLE 7D: EXOSQUELETTE DU MEMBRE SUPÉRIEUR
À RETOUR D’EFFORT
| PAGE 56
Applications : Rééducation fonctionnelle
Assistance motrice
Téléopération
Réalité virtuelle grand champ
Performances/Spécificités :
Intégrable à un dossier : environnements exigus, au domicile
Contrôle en effort sans capteur d’effort/haute sûreté
Haute transparence (très faible résistance au mouvement)
Capacité d’effort comparable à l’homme

Les Rencontres du Visiatome | 16 MAI 2013 | PAGE 57
ABLE 7D: EXOSQUELETTE DU MEMBRE
SUPÉRIEUR À RETOUR D’EFFORT
Conception – Technologie
Actionneurs longitudinaux - Vérins à câbles
Architecture anthropomorphe (7 axes), ouverte
Epaule à axes obliques
Avant-Bras-Poignet à structure parallèle
5 brevets

Évaluation de ABLE en rééducation
(Projet ANR Brahma )
pour des applications de rééducation fonctionnelle et
améliorer les connaissances sur le contrôle moteur
Utilisation du prototype ABLE 4 axes du CEA
Préparation des expériences avec patient
Validation du niveau élevé de transparence intrinsèque
Evaluation de différents modes d’assistance avec guidage
sur les synergies naturelles
.
| PAGE 58 LRI 06/12/2012
EXOSQUELETTE DU MEMBRE SUPÉRIEUR À
RETOUR D’EFFORT

EXOSQUELETTES AMBULANTS – PANORAMA MONDIAL
Applications médicales: Rééducation et suppléance Augmentation
capacité humaines: Militaire & Civil
Hercule
Rex ReWalk
Hal
Lopes
Lokomat
Xos 2
Hulc
| PAGE 59

EXOSQUELETTES AMBULANTS
| PAGE 60
HERCULE
Fruit d’un partenariat RB3D (PME, leader),
ESME-Sudria (Ecole d’ingénieur) et le CEA
Technologies-clés d’actionnement à haut
rendement et de commande issue du CEA
Démonstration d’assistance d’une charge de 40kg
dans le dos et de 13kg sur les bras
Autonomie sur batterie compétitive
L’après Hercule :
Charge utile augmentée en conservant la
transparence
Charge utile égale avec transparence améliorée
Créer avec l’industriel des exosquelettes efficaces
(puissants et transparents) et sûrs

• Objectifs projet
Actionnement électrique réversible
Pas de capteur d’intention
Usage dual civil / militaire
Objectifs : 40kg à 100kg charge utile et autonomie de 4 h à 5km/h
• Problématiques :
Cinématique, points d’accroche sur personne
Actionneurs longeant les membres
Architecture enveloppante (non « emprisonnante »)
Nb ddl actionnés et passifs
Commande transparente : compensation poids, frottements et inertie
Conception des bras
Gestion de l’énergie
| PAGE 61
HERCULE

HERCULE - CONCEPTION
• Cinématique des jambes à 7 degrés de liberté dont 2 actionnés
• Vérins à câbles pour actionner genou et hanches
• Liaisons avec Homme : dos et pieds
• Design intégré dès phase conception
• Conception des bras a 1 actionneur
• Vérin à câble unique en position dorsale
• Transmission fractionnée (câbles primaire/secondaire)
• Déploiement d’une force verticale ascendante sur la main
Opérateur
Exosquelette
Liaison
Charge
| PAGE 62

HERCULE - Commande
• Surveillance des défauts pour garantir la sureté de fonctionnement et la sécurité d’usage
• Etude des évènements redoutés
• Surveillance de l’état du système
• Mise en sécurité en cas de défaut détecté (arrêt)
• Commande verticale de compensation de la masse portée
• Compensation de gravité du dos
• Compensation de gravité des segments de jambe
• Compensation frottements actionneurs
| PAGE 63

APPLICATIONS CIVILES ET MILITAIRES DES
EXOSQUELETTES AMBULANTS
| PAGE 64

EXOSQUELETTES AMBULANTS
PROJETS DE COMMANDE DIRECTE PAR LE CERVEAU (BRAIN COMPUTER
INTERFACE)
| PAGE 65
Aujourd’hui : Commande par des signaux nerveux : EMG (électromyographie)
EMG est souvent utilisée en évaluation, analyse
Contrôle par EMG: HAL, ATR [Morimoto&al 2012]
MultiElectrode Array
Casque EEG ElectroEncephalogramme
Matrices ECoG
ElectroCorticoGramme
CEA/CLINATEC
Demain : Commande par des signaux
cérébraux : BCI
Projet avec REX Contreras-Vidal, Houston
Projet MINDwalker
Projet Exo EMY
du CEA-LIST

| PAGE 66
Stabilité sans cannes: crucial
pour des assistances « autonomes»
pour une rééducation ambulatoire
Surveiller la stabilité
Développer des stratégies utilisant:
- l’adaptation d’impédance
- le placement des pieds
EXOSQUELETTES AMBULANTS
RECHERCHES SUR L’ÉQUILIBRE: COMMENT NE PAS TOMBER ?

Réalisé avec le précieux concours du service de documentation et d’archive du
centre CEA Fontenay-aux-Roses
et en particulier de :
Clémentine Markidès
Gwenaëlle Clerc
Fabien Bleuze
Sauf mention contraire, les documents iconographiques illustrant cette
présentation sont des copyright Archives CEA (CEA et Don IRSN/DEI/SARG)
| PAGE 67

Direction Recherche Technologique
Département Intelligence Ambiante et
Systèmes Interactifs
Laboratoire
Commissariat à l’énergie atomique et aux énergies alternatives
Institut Carnot CEA LIST
Centre de Fontenay-aux-Roses|18, route du Panorama
BP6 | 92265 Fontenay-aux-RosesCedex
T. +33 (0)1 46 54 91 17| F. +33 (0)1 46 54 89 80
Etablissement public à caractère industriel et commercial | RCS Paris B 775 685 019
| PAGE 68
CEA | 18 OCTOBRE 2012
Recommended

















