MICROCLUB Main LPC
Construction d’une main robotique pourcoder du LPC
Yves Masur (06/03/2015)
Plan de la conférence
• Introduction au langage parlé complété (LPC)• But et utilité du montage• Mains robotiques existantes• Construction des doigts et de la main• Bras et motorisation, subtilités diverses• Commande par Arduino Leonardo• Soft embarqué• Démonstration
Le langage parlé complété (LPC)
• Le LPC est un codage. • La main près du visage complète, syllabe par syllabe tout ce qui est dit• C’est une aide à la lecture sur les lèvres
• Ce n’est pas de la lange des signes!
3 éléments sont nécessaire pour parler à une personne sourde• La parole, normale (en français pour nous)• Seul environ 35% du message est perçu
• Avec le LPC :• Coder les sons «voyelles», 5 positions autour
du visage• Coder les consonnes, 8 clefs des doigts
Plus d’info sur le LPC
• Plus d’info sur le LPC en Suisse:• http://www.alpc.ch/
• http://yvesmasur.ch/livre/«Entre le son et l’enfant sourd»A la page 70
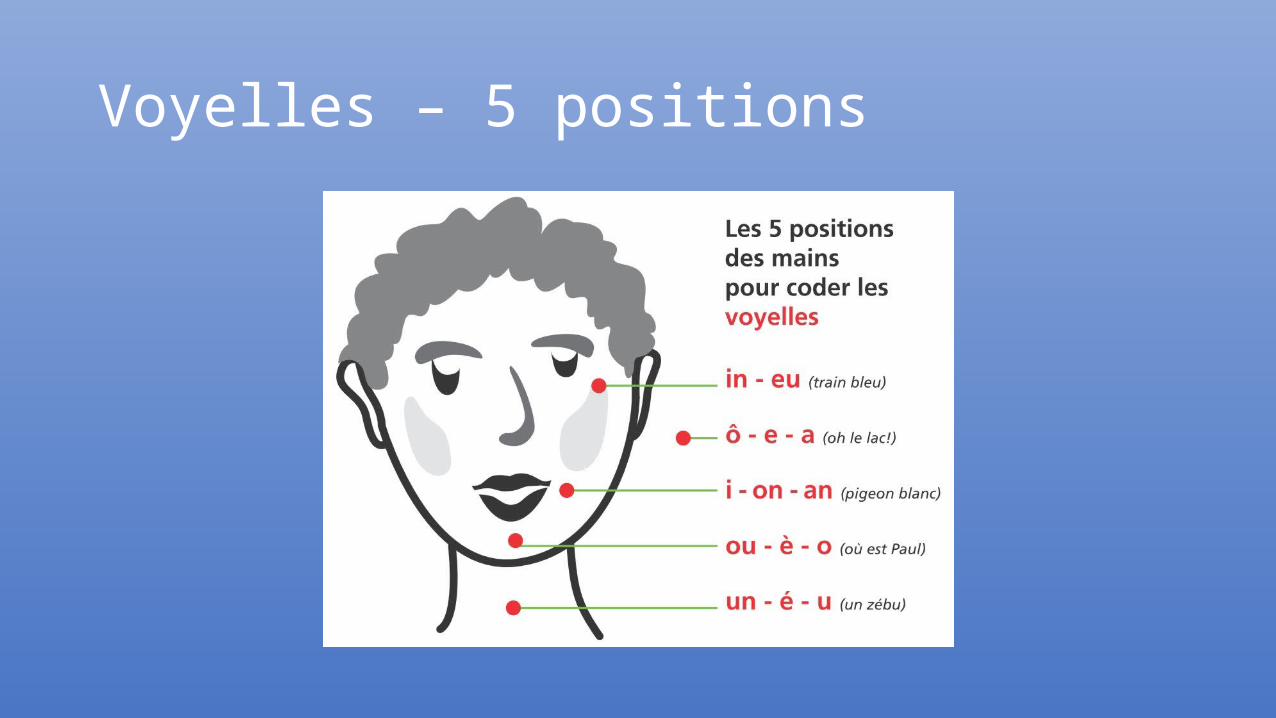
Voyelles – 5 positions
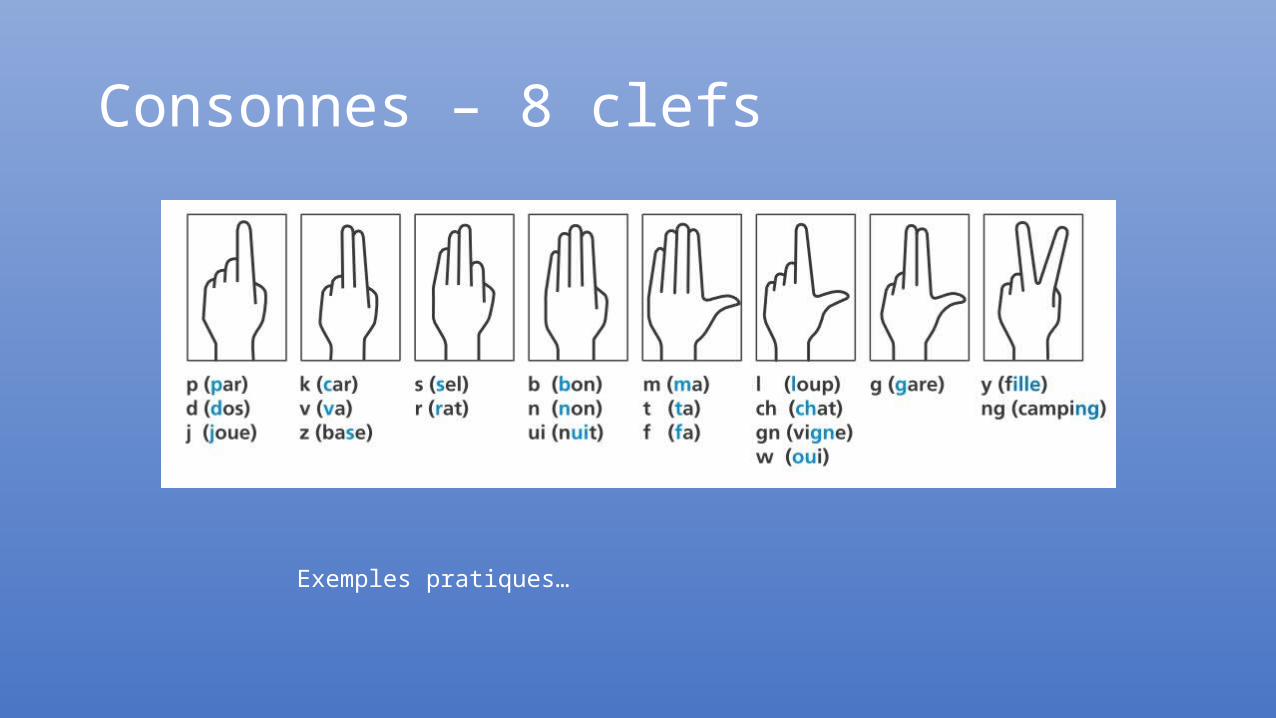
Consonnes – 8 clefs
Exemples pratiques…
Main mécanique – but?
Pas pour…• Ne remplace pas une codeuse –
interprète!• N’est (ne sera) pas un robot
«sans faute»• On oublie le temps réel
Convient pour…• Objet ludique• Apprentissage• Intérêt pour les enfants• Démontrer la simplicité du LPC
Quelles constructions sur le WEB?
• Mots clefs : mechanical hand / arm

Main mécanique (grande)
+ Visibilité- Peu réaliste- Motorisation?

Main de robot
• http://xrobots.co.uk/alien2/index_hands.html
+ Imprimable 3D- Mobilité réduite- L’index ne s’écarte pas

Main grande, en bois
+ facile à construire- Peu réaliste- L’index ne s’écarte pas

Main réaliste
+ Mobilité naturelle+ toutes les phalanges (4:30)- L’index ne s’écarte pas
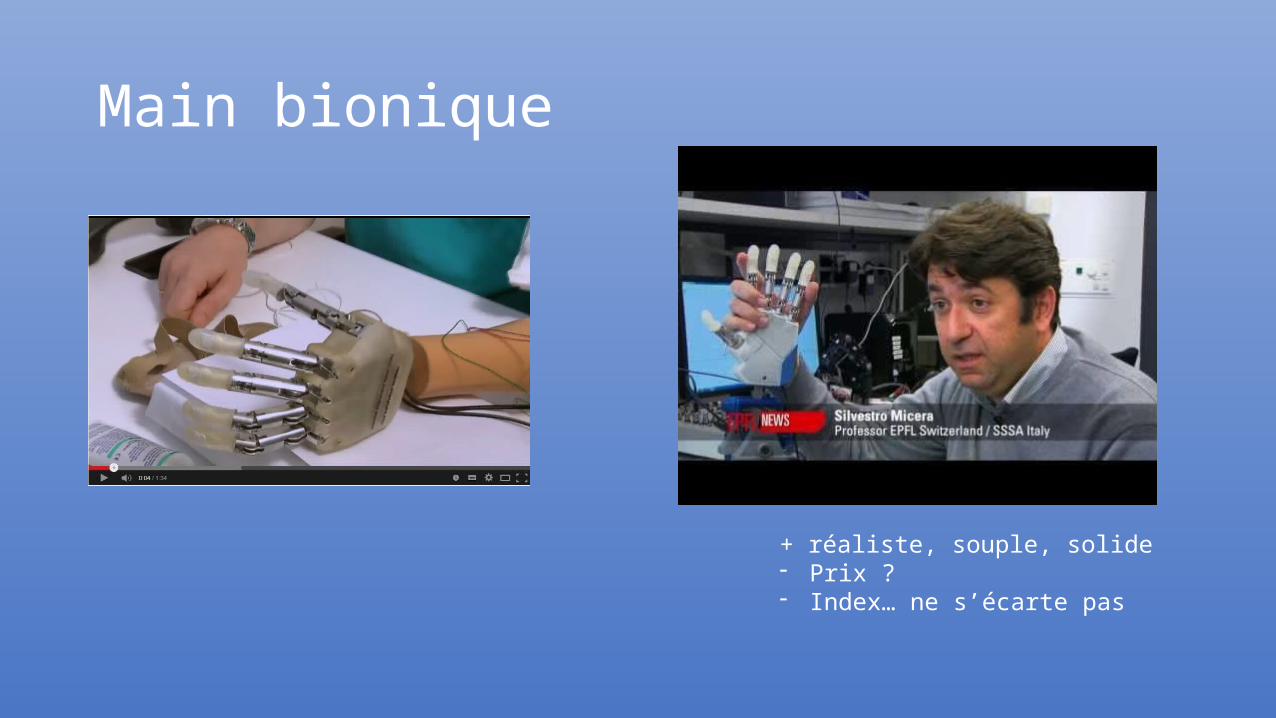
Main bionique
+ réaliste, souple, solide- Prix ?- Index… ne s’écarte pas
Main – construction simple
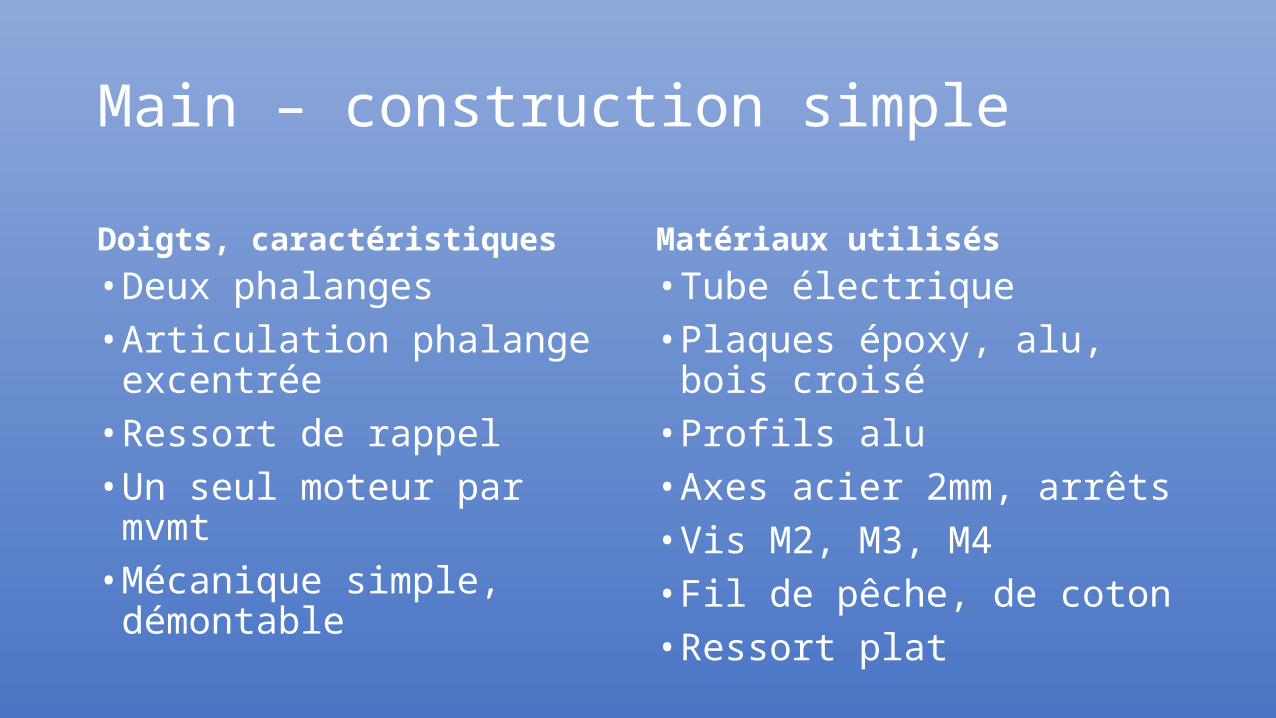
Doigts, caractéristiques• Deux phalanges• Articulation phalange excentrée• Ressort de rappel• Un seul moteur par mvmt• Mécanique simple, démontable
Matériaux utilisés• Tube électrique• Plaques époxy, alu, bois croisé• Profils alu• Axes acier 2mm, arrêts• Vis M2, M3, M4• Fil de pêche, de coton• Ressort plat
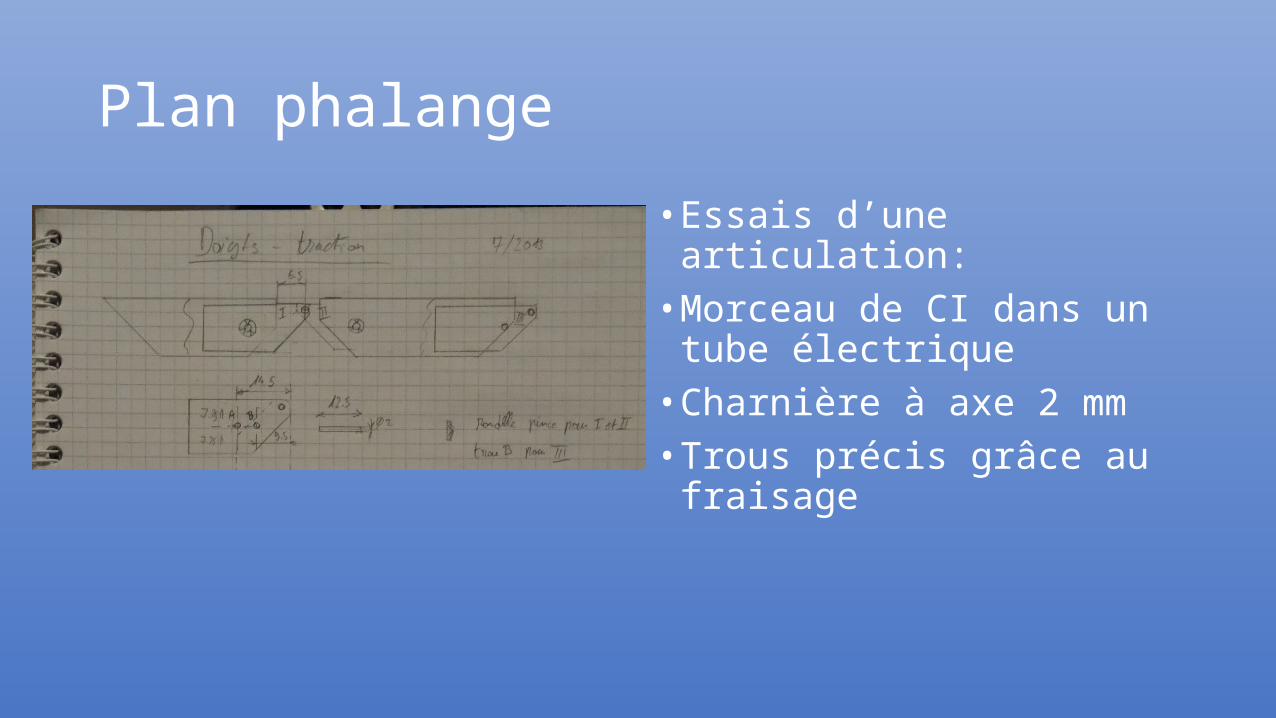
Plan phalange
• Essais d’une articulation:• Morceau de CI dans un tube
électrique• Charnière à axe 2 mm• Trous précis grâce au fraisage
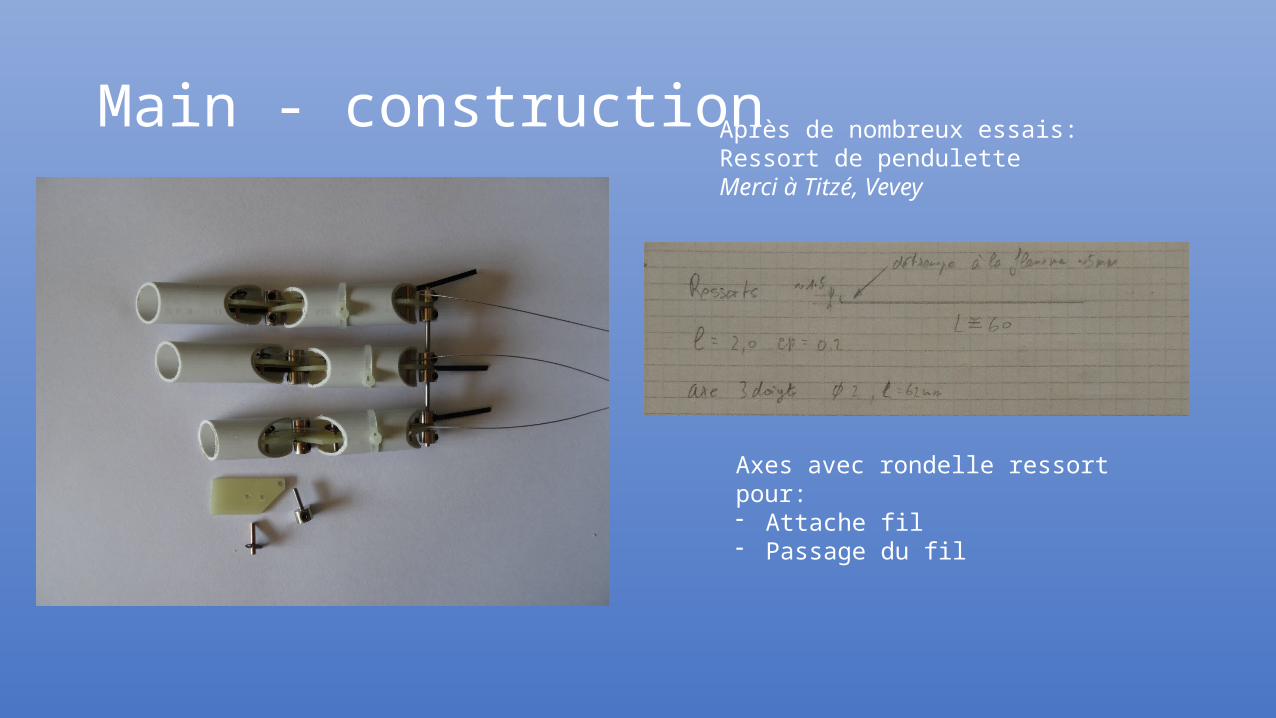
Main - construction Après de nombreux essais:Ressort de penduletteMerci à Titzé, Vevey
Axes avec rondelle ressort pour:- Attache fil- Passage du fil
Main - construction
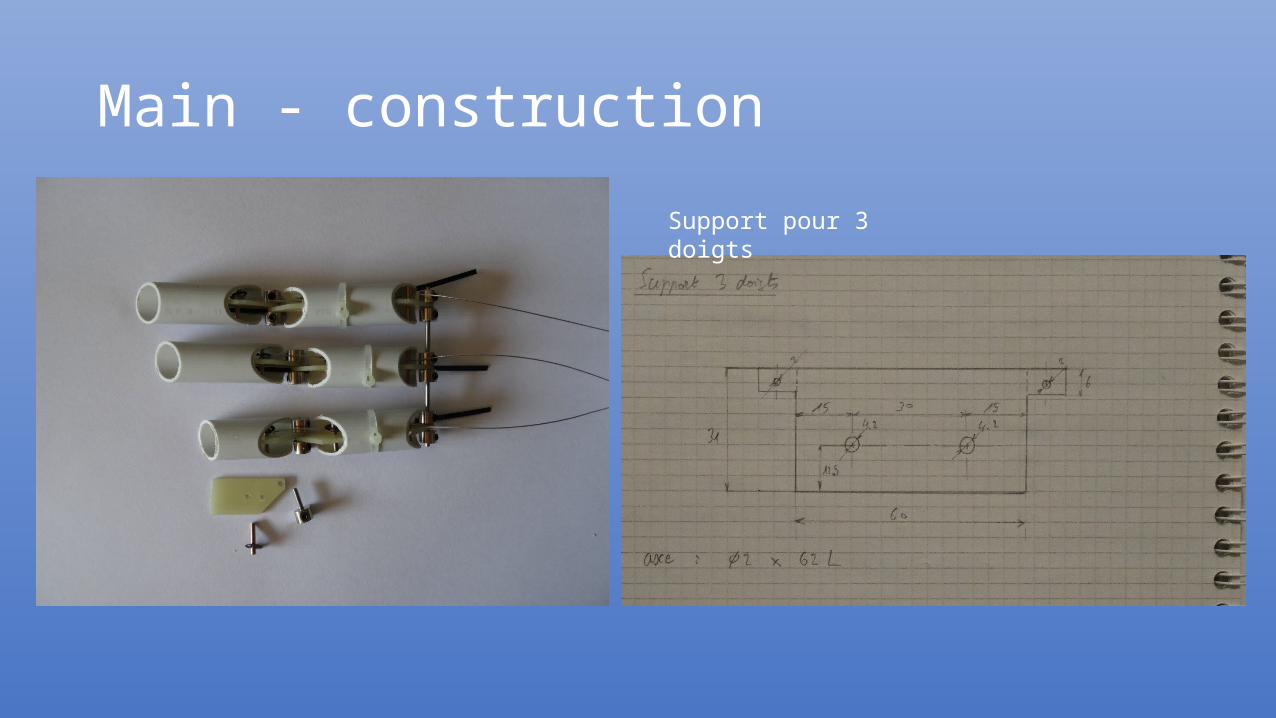
Support pour 3 doigts
Main - construction
Main - montage
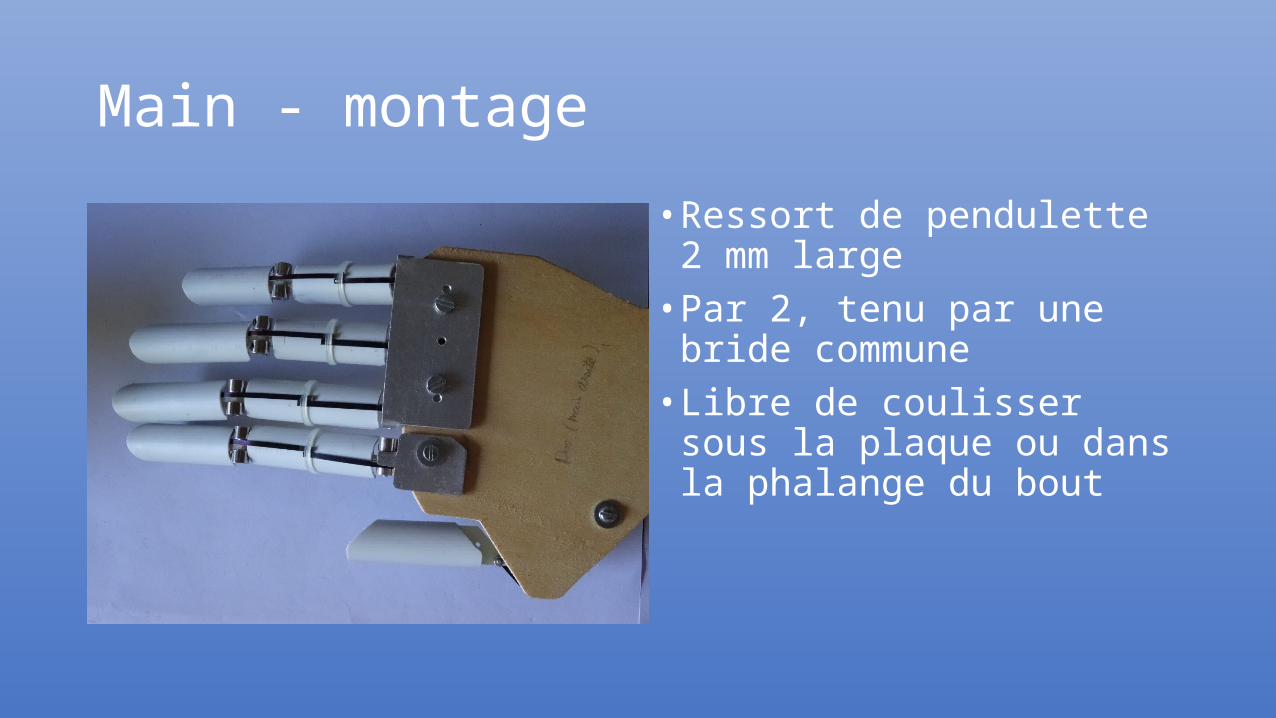
• Ressort de pendulette 2 mm large• Par 2, tenu par une bride
commune• Libre de coulisser sous la plaque
ou dans la phalange du bout
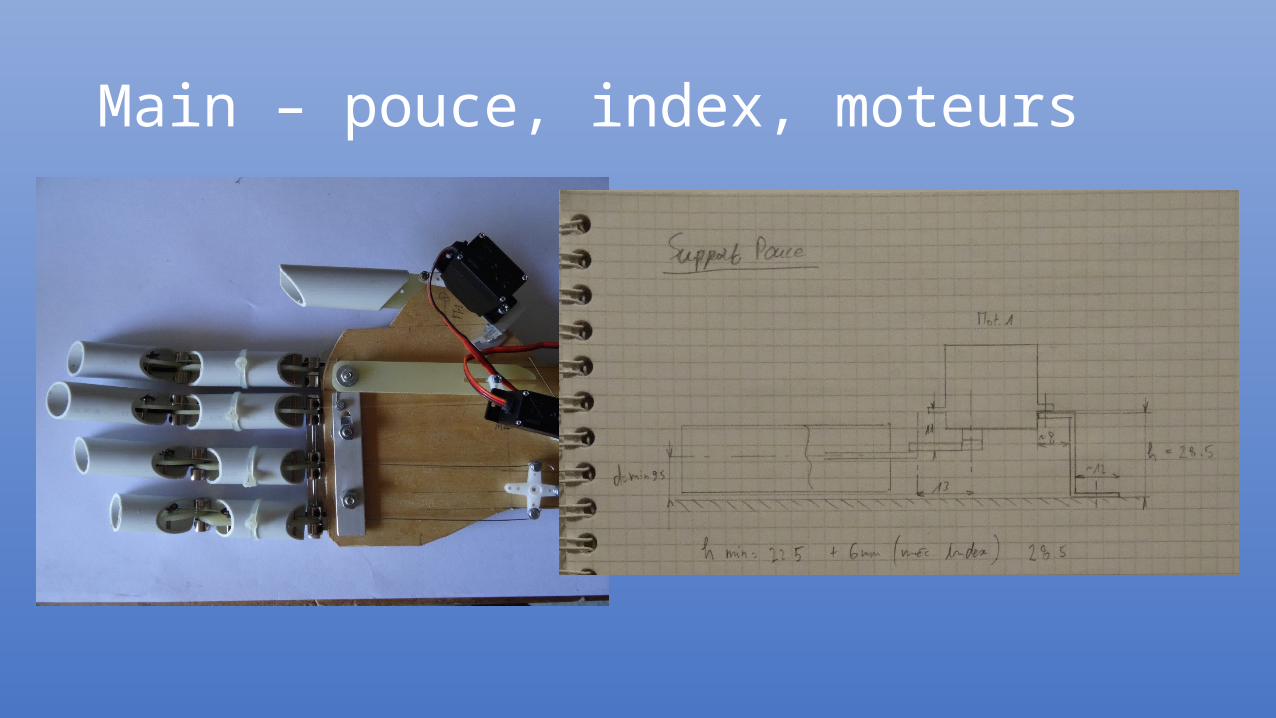
Main – pouce, index, moteurs
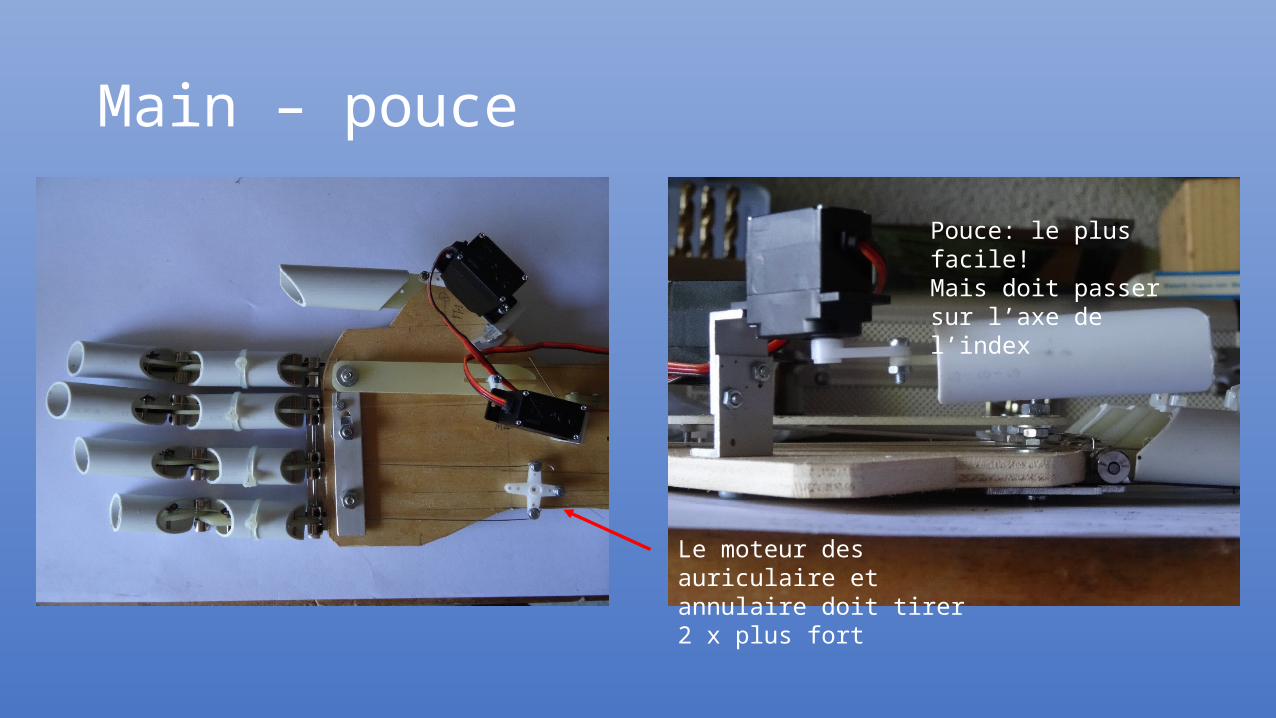
Main – pouce
Pouce: le plus facile!Mais doit passer sur l’axe de l’index
Le moteur des auriculaire et annulaire doit tirer 2 x plus fort
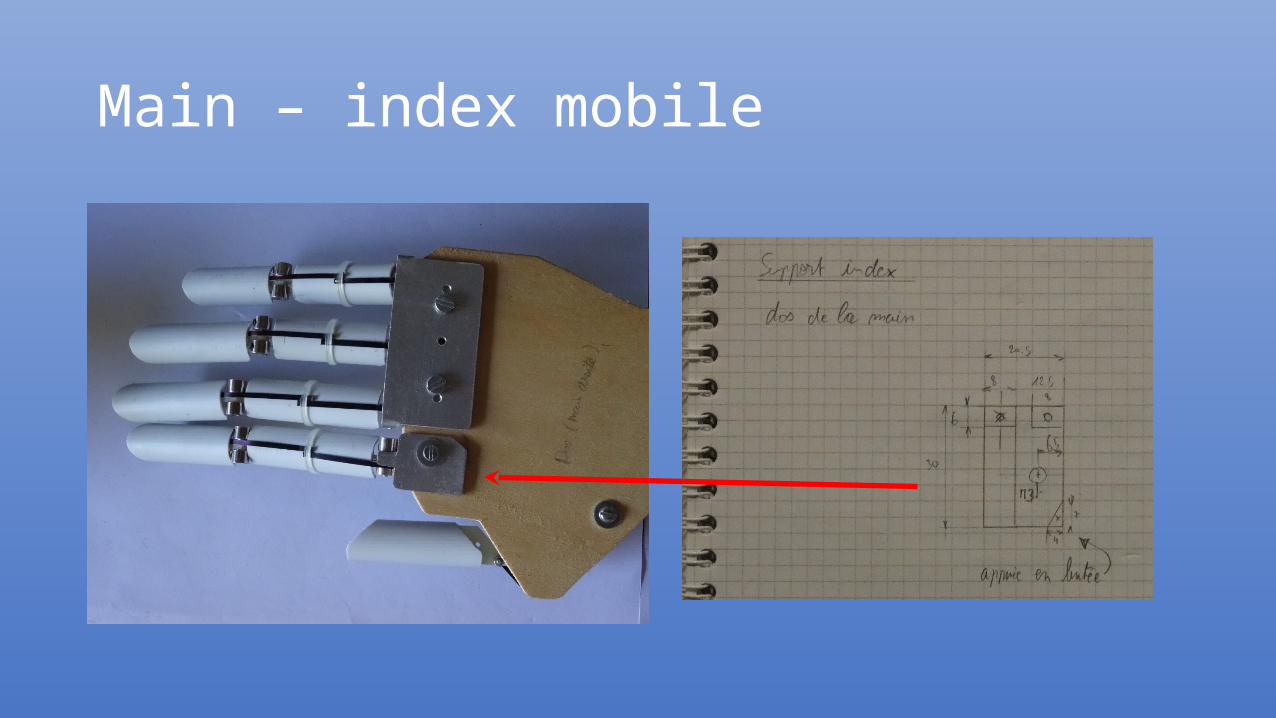
Main – index mobile
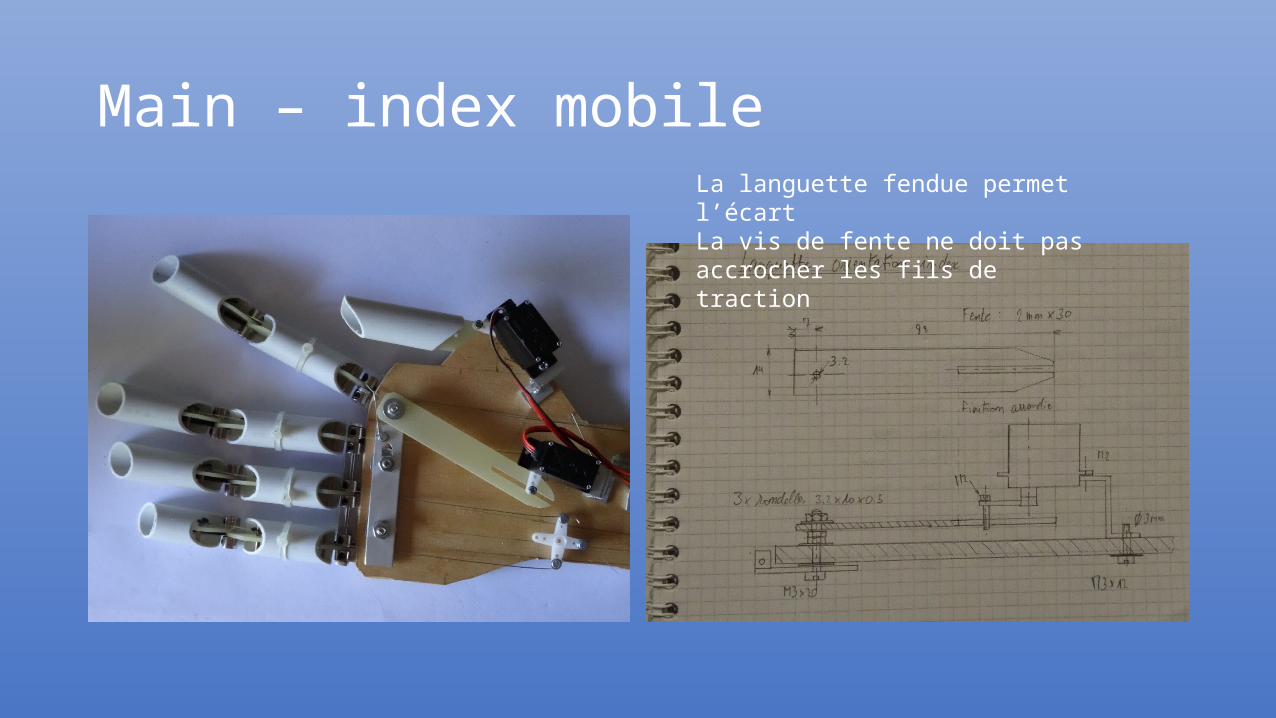
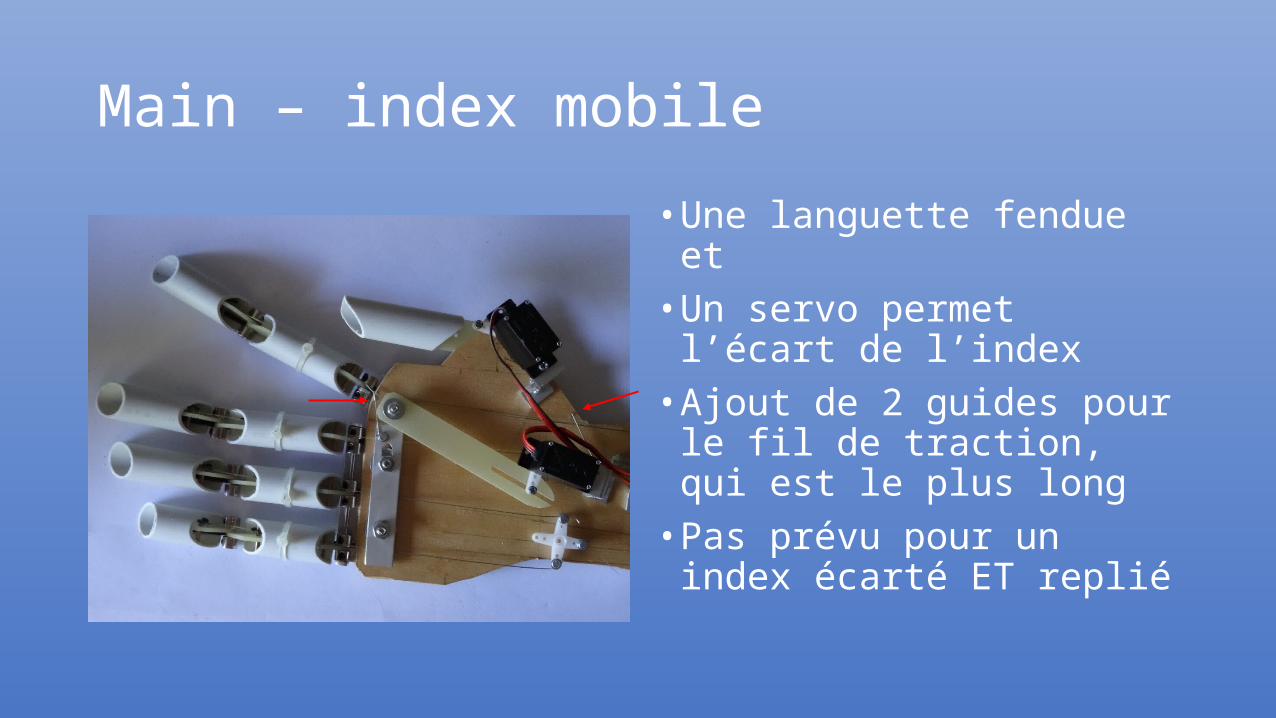
Main – index mobileLa languette fendue permet l’écartLa vis de fente ne doit pas accrocher les fils de traction
Main – index mobile
• Une languette fendue et• Un servo permet l’écart de
l’index• Ajout de 2 guides pour le fil de
traction, qui est le plus long• Pas prévu pour un index écarté
ET replié
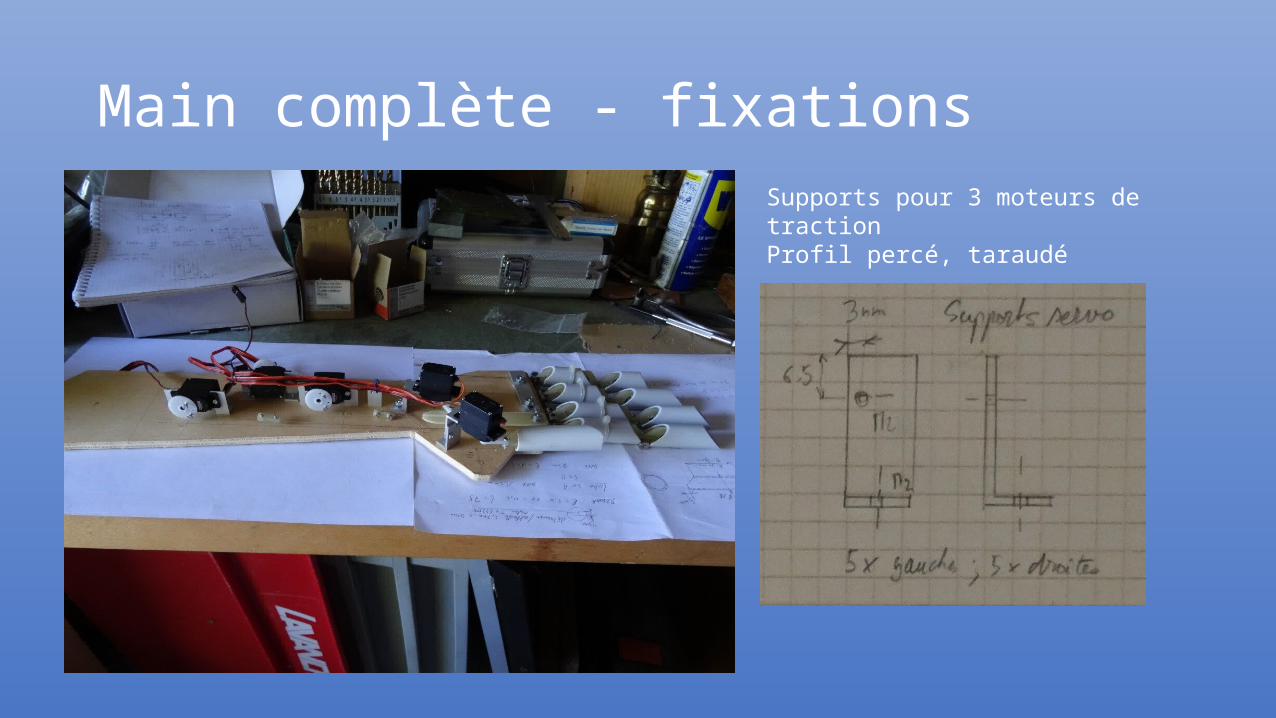
Main complète - fixationsSupports pour 3 moteurs de tractionProfil percé, taraudé
Main complète – câbles traction
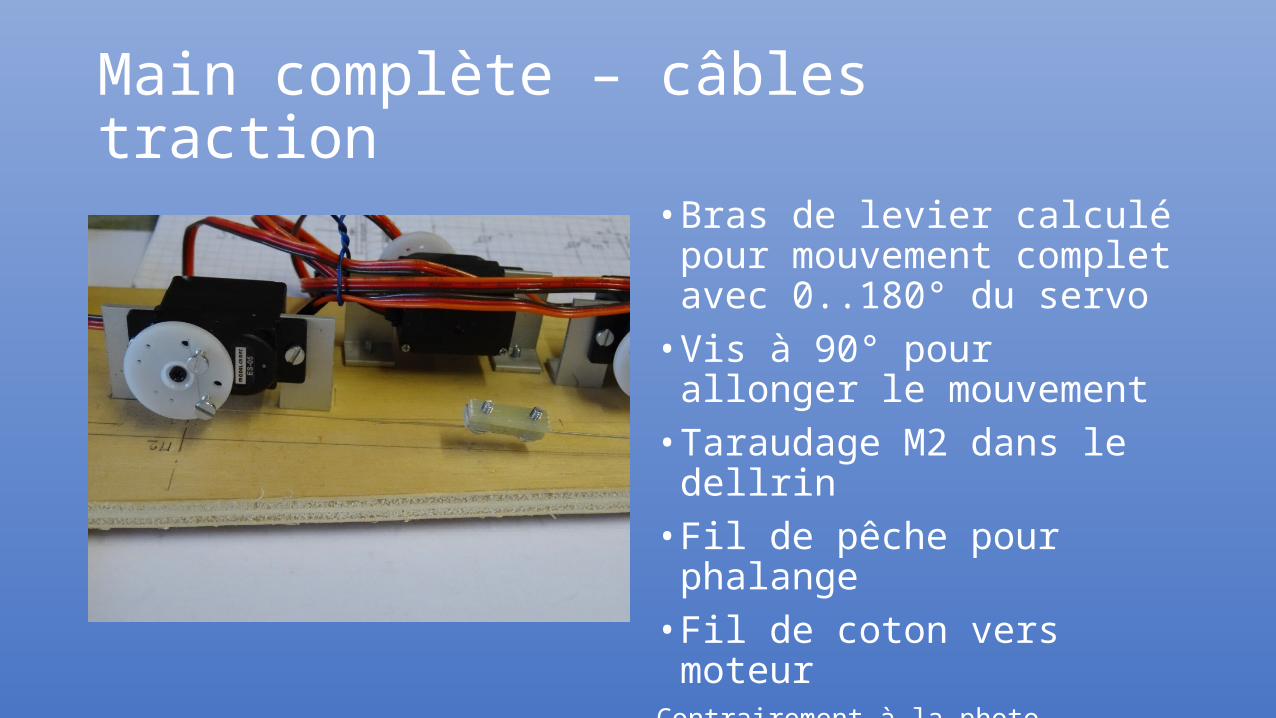
• Bras de levier calculé pour mouvement complet avec 0..180° du servo• Vis à 90° pour allonger le
mouvement• Taraudage M2 dans le dellrin• Fil de pêche pour phalange• Fil de coton vers moteurContrairement à la photo
Main – avant bras
Doigts - Résultats
• Les mouvements sont plus lents que prévu• Le moteurs peinent et vibrent• Le moteur M5 (2 doigts) doit
être changé• Les fils de coton doivent recevoir
une goutte de peinture pour ne pas se délier
• Les calculs des mouvements est OK• La mécanique des ressorts
fonctionne• Le positionnement au repos
laisse à désirer• Attention aux collisions entre les
mouvement du pouce et l’index
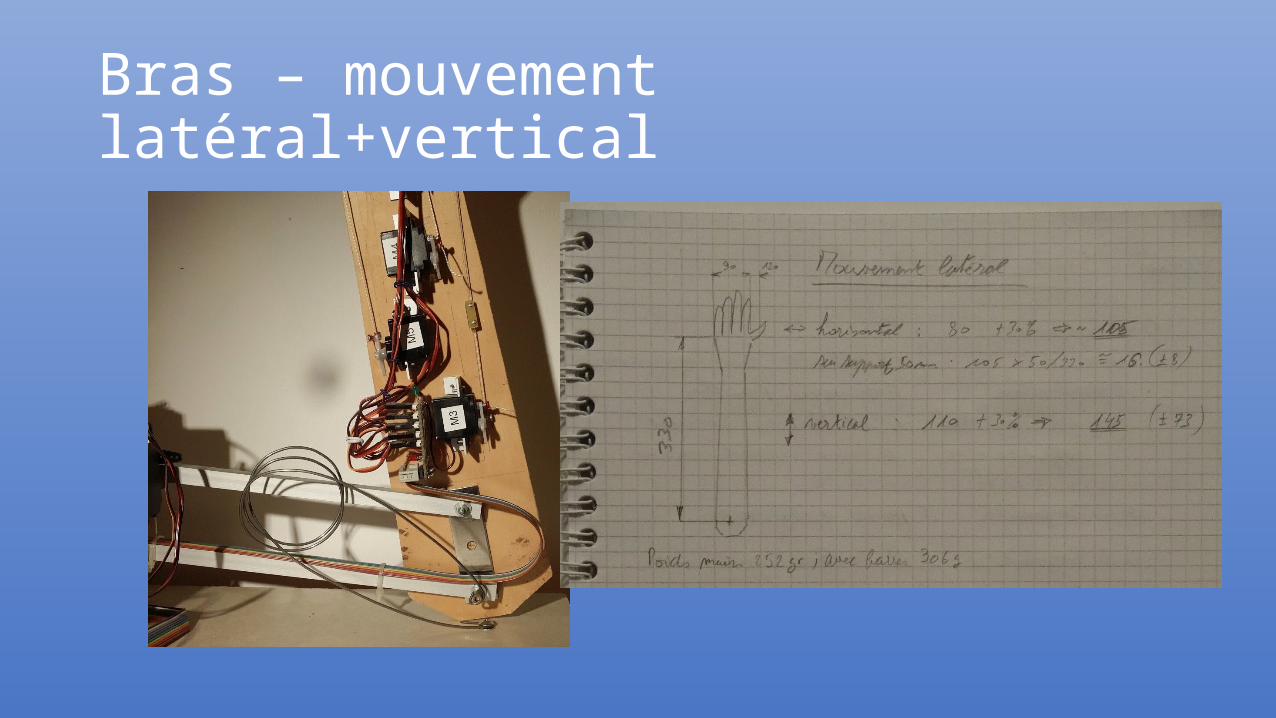
Bras – mouvement latéral+vertical
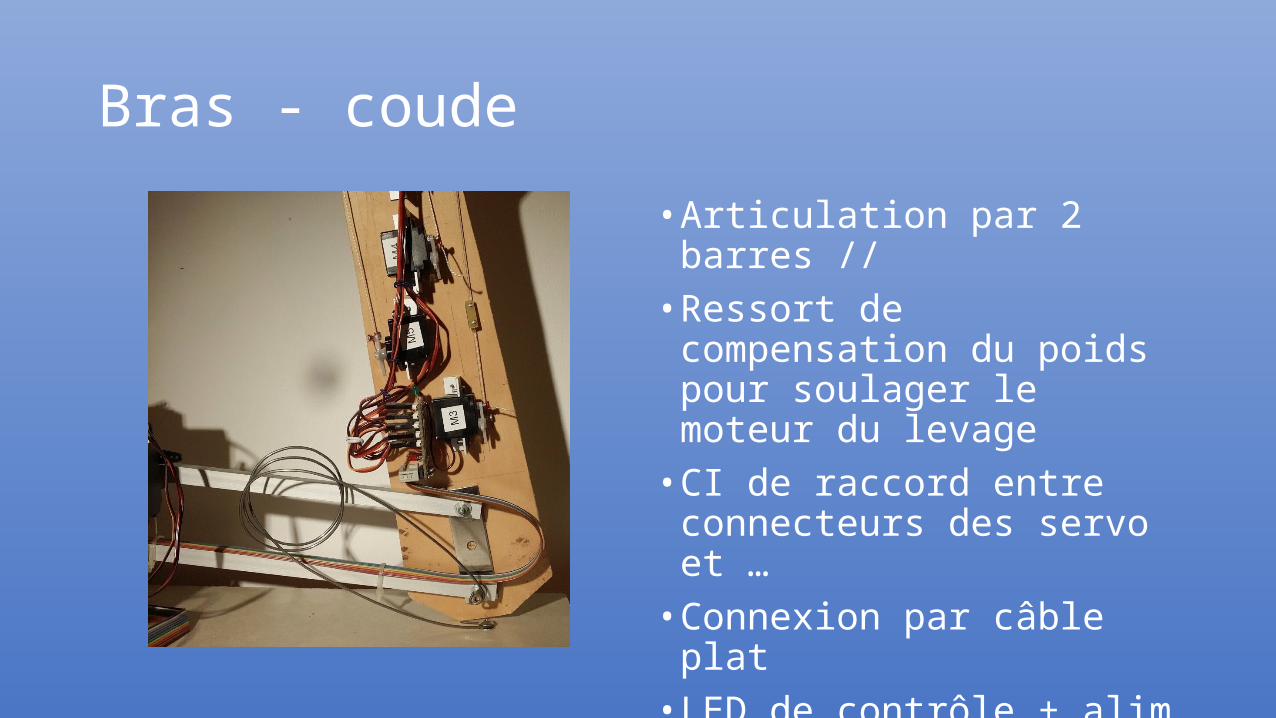
Bras - coude
• Articulation par 2 barres //• Ressort de compensation du
poids pour soulager le moteur du levage• CI de raccord entre connecteurs
des servo et …• Connexion par câble plat • LED de contrôle + alim
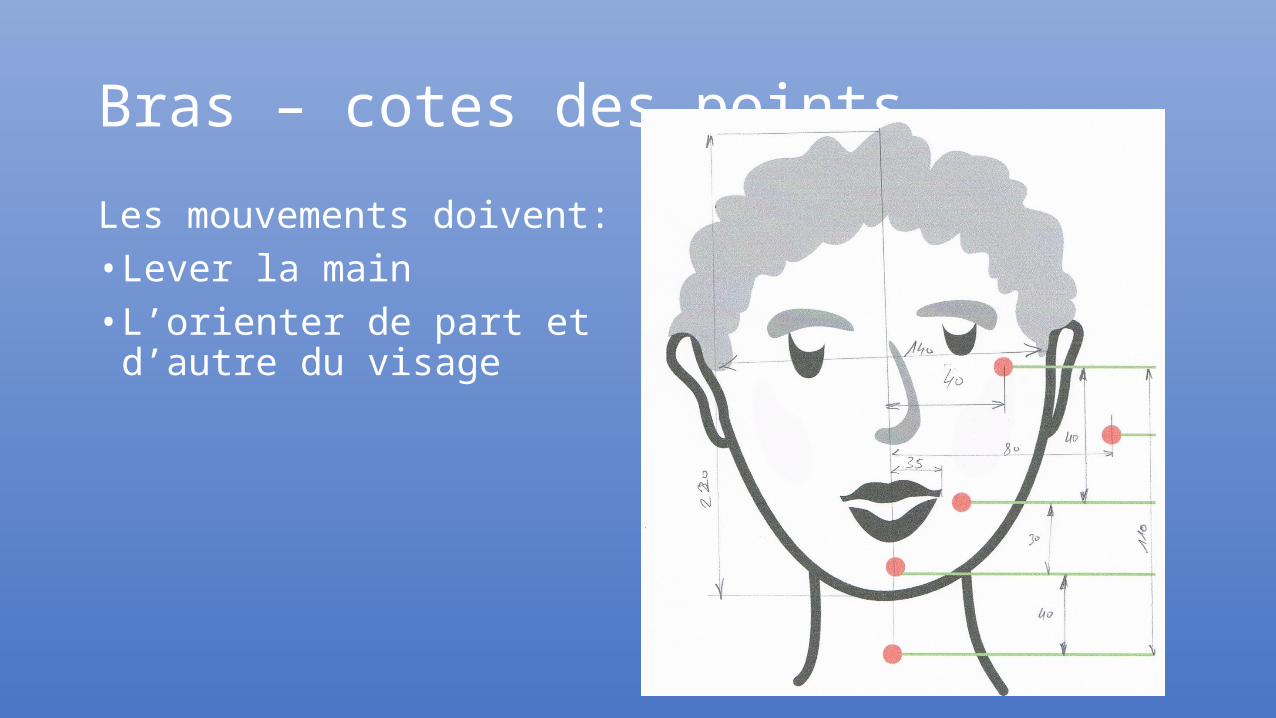
Bras – cotes des points
Les mouvements doivent:• Lever la main• L’orienter de part et d’autre du
visage
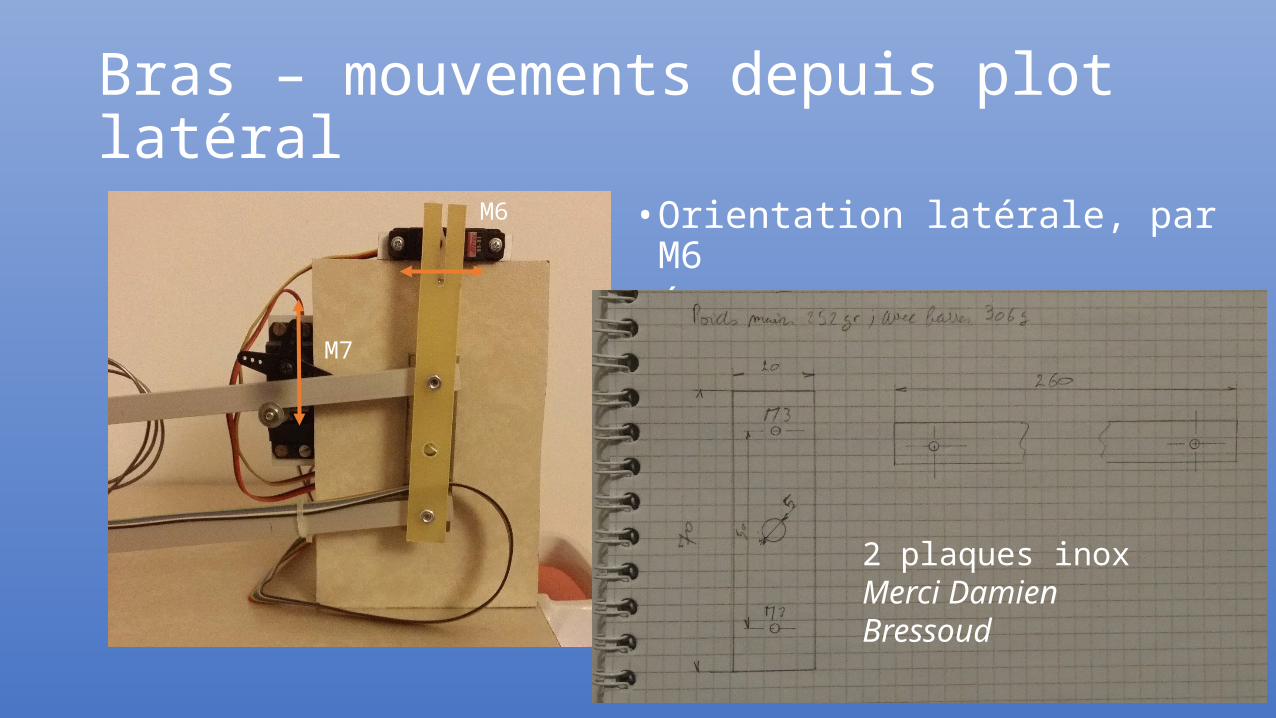
Bras – mouvements depuis plot latéral
• Orientation latérale, par M6• Élévation, bras de levier x 5, par M7
M6
M7
2 plaques inoxMerci Damien Bressoud
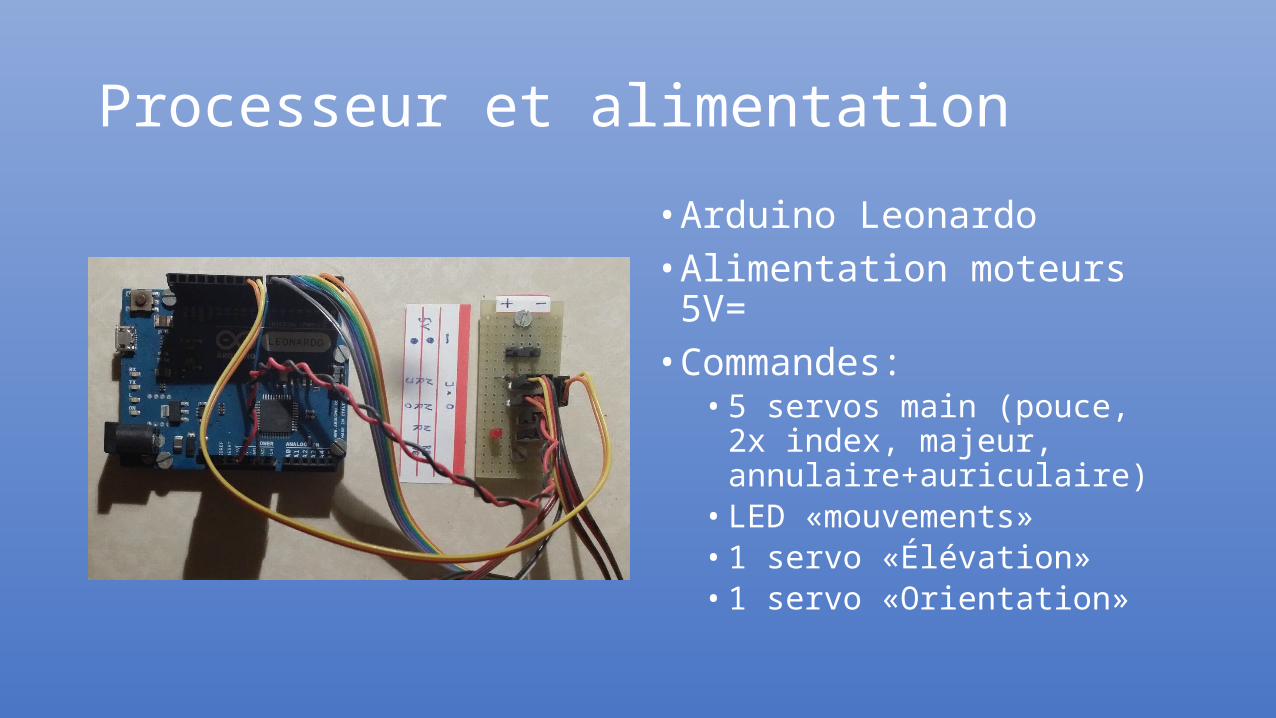
Processeur et alimentation
• Arduino Leonardo• Alimentation moteurs 5V=• Commandes:• 5 servos main (pouce, 2x index,
majeur, annulaire+auriculaire)• LED «mouvements»• 1 servo «Élévation»• 1 servo «Orientation»
Conclusion sur le «hardware»
Montage en général• La mécanique est compliquée• Les bonnes solutions demandent
beaucoup de réflexion• Il faut être précis• Il faut penser à la durée• Il faut penser à la réparation
Projet «Main LPC»• Fragile – ne peut être prêté• Convient pour des démos• Parallaxe trop important avec
visage fixe.
C’est fini pour le hard.Un coup d’œil au soft?
Recommended