Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
IMethoden der Fernerkundung
Vorlesung für geographischen StudiengängeModul MNF-Geogr. 14Passive Aufnahmesysteme I
Prof. Dr. Natascha Oppelt
Arbeitsgruppe Fernerkundung & UmweltmodellierungGeographisches Institut Christian-Albrechts-Universität zu [email protected]
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
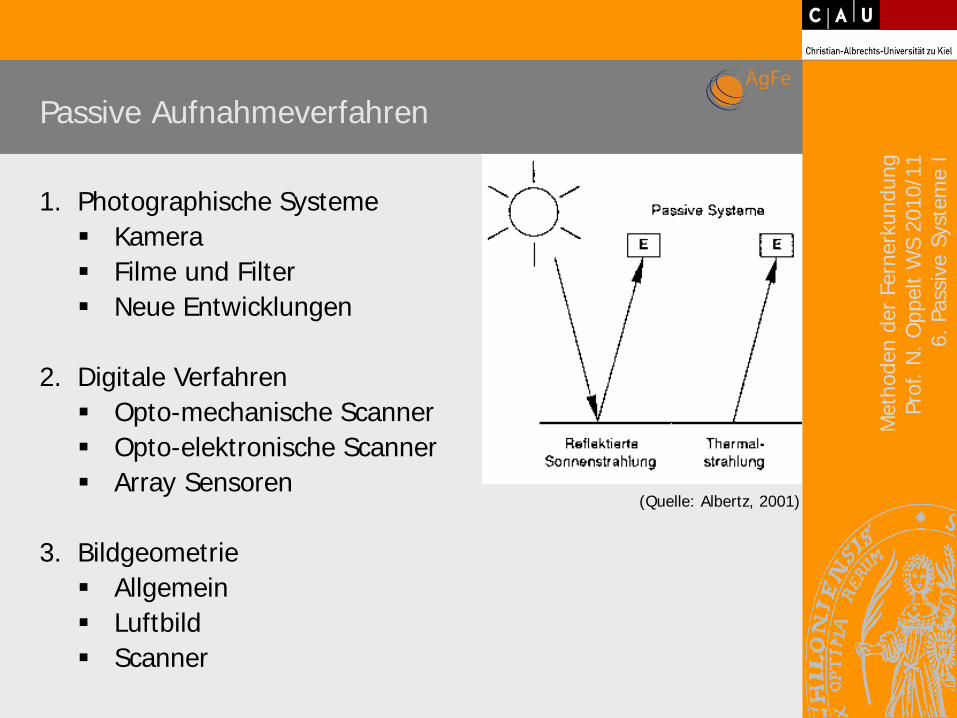
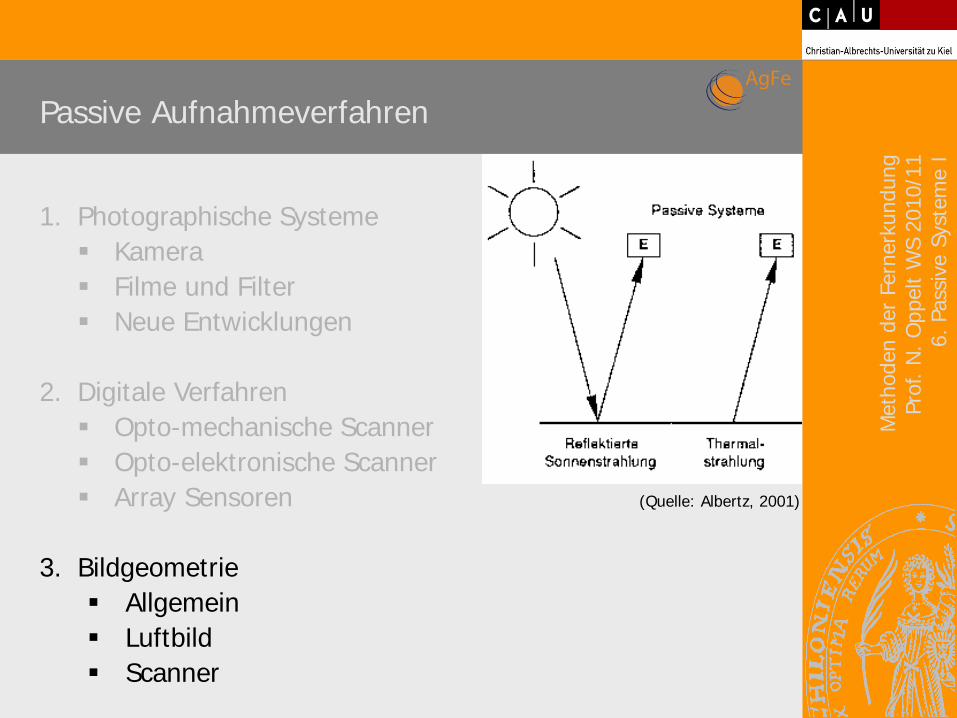
Passive Aufnahmeverfahren
1. Photographische Systeme Kamera Filme und Filter Neue Entwicklungen
2. Digitale Verfahren Opto-mechanische Scanner Opto-elektronische Scanner Array Sensoren
3. Bildgeometrie Allgemein Luftbild Scanner
(Quelle: Albertz, 2001)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Photographische Systeme
Grundlage der klassischen photographischen Aufnahmen von Luft- und Satellitenbildern
Photographische, lichtempfindliche Schicht eines Filmes dient als analoges Speichermedium
Passives Verfahren, das Strahlung im VIS und NIR (400-1000 nm) je nach Filmempfindlichkeit aufnimmt
Klassische Luftbildtechnik relativ preisgünstig und ermöglicht individuelle Flächenerfassung
Nachteile: - schwierige radiometrische Kalibrierung,- geringe spektrale Auflösung,- analoger Primärzustand der Daten (Negativ/Positiv) aufwendige Wandlung zur digitalen Weiterverarbeitung
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
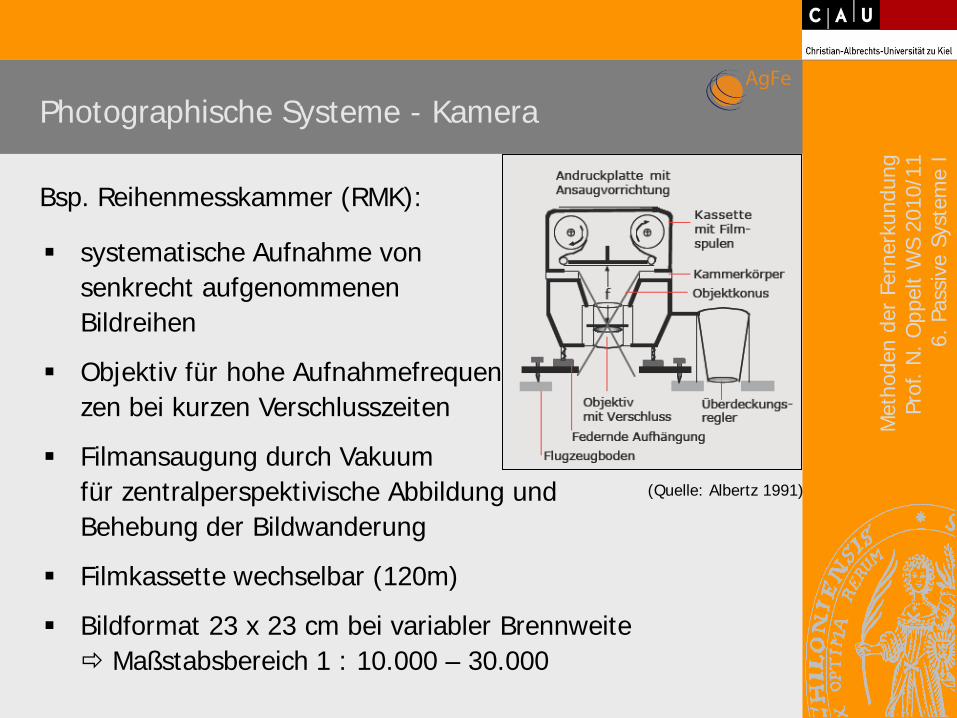
Bsp. Reihenmesskammer (RMK):
systematische Aufnahme von senkrecht aufgenommenen Bildreihen
Objektiv für hohe Aufnahmefrequenzen bei kurzen Verschlusszeiten
Filmansaugung durch Vakuum für zentralperspektivische Abbildung und Behebung der Bildwanderung
Filmkassette wechselbar (120m)
Bildformat 23 x 23 cm bei variabler Brennweite Maßstabsbereich 1 : 10.000 – 30.000
(Quelle: Albertz 1991)
Photographische Systeme - Kamera
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
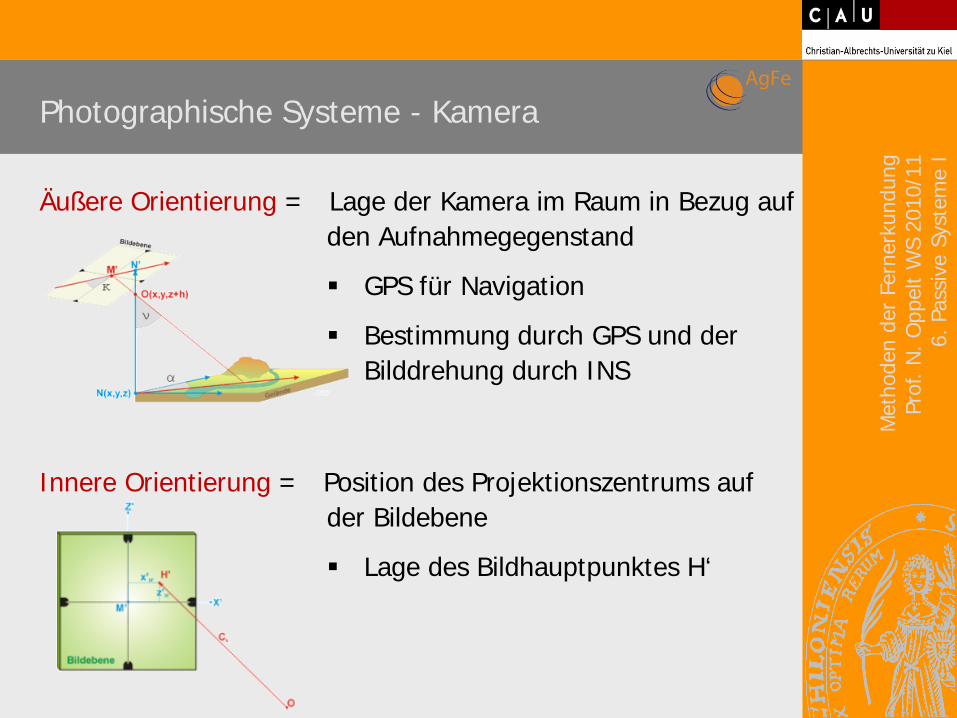
Äußere Orientierung = Lage der Kamera im Raum in Bezug auf den Aufnahmegegenstand
GPS für Navigation
Bestimmung durch GPS und der Bilddrehung durch INS
Innere Orientierung = Position des Projektionszentrums auf der Bildebene
Lage des Bildhauptpunktes H‘
Photographische Systeme - Kamera
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
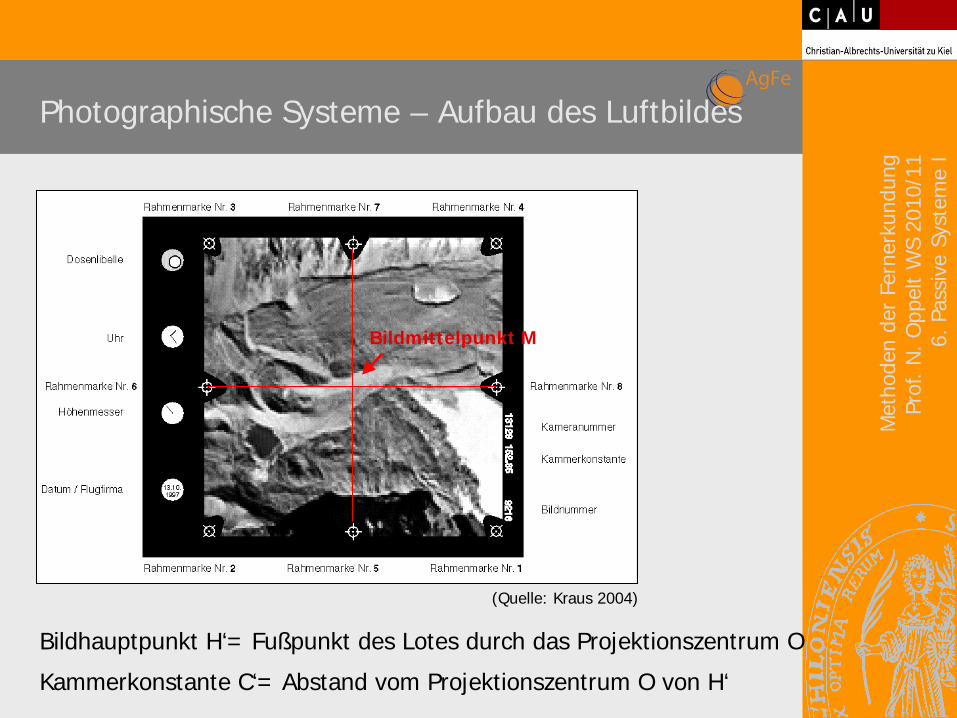
Bildmittelpunkt M
Photographische Systeme – Aufbau des Luftbildes
(Quelle: Kraus 2004)
Bildhauptpunkt H‘= Fußpunkt des Lotes durch das Projektionszentrum O
Kammerkonstante C‘= Abstand vom Projektionszentrum O von H‘
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
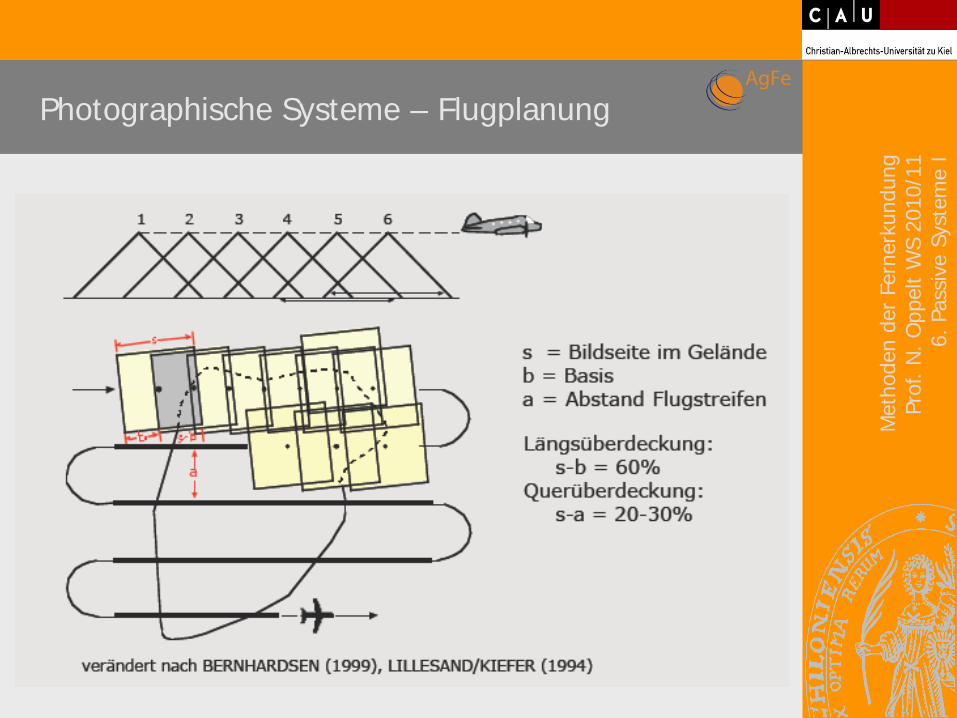
Photographische Systeme – Flugplanung
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
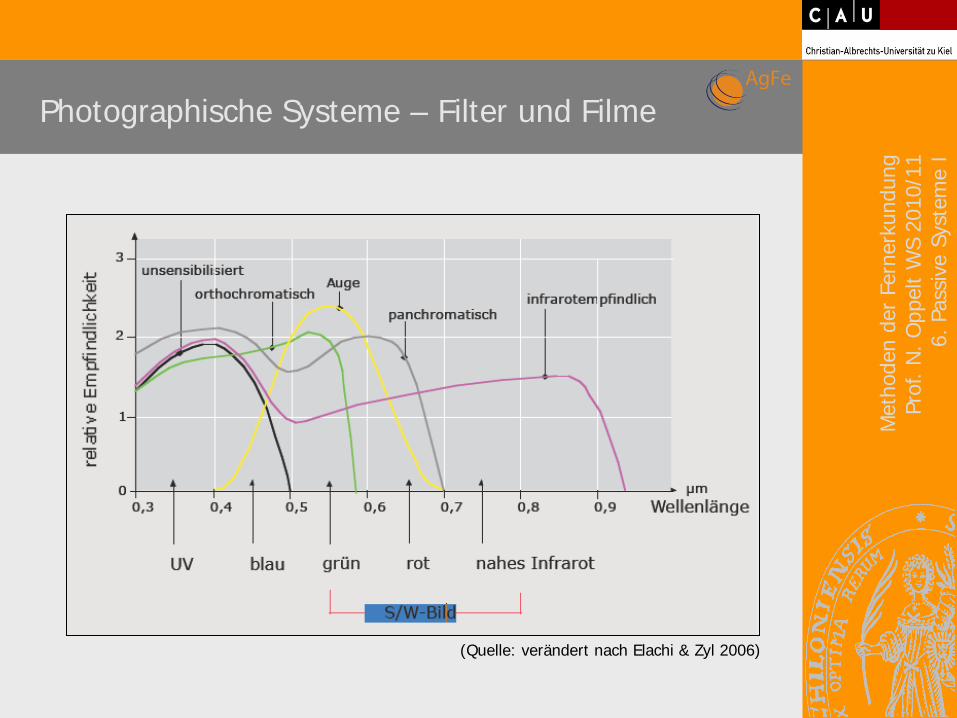
Photographische Systeme – Filter und Filme
(Quelle: verändert nach Elachi & Zyl 2006)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
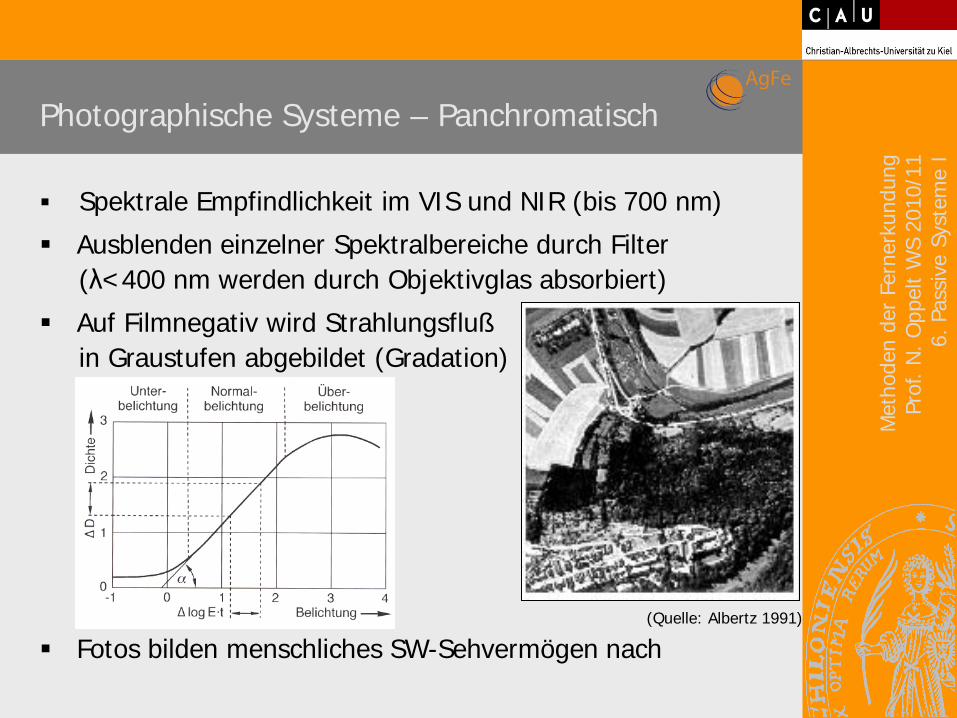
Spektrale Empfindlichkeit im VIS und NIR (bis 700 nm)
Ausblenden einzelner Spektralbereiche durch Filter (λ<400 nm werden durch Objektivglas absorbiert)
Auf Filmnegativ wird Strahlungsfluß in Graustufen abgebildet (Gradation)
Fotos bilden menschliches SW-Sehvermögen nach
Photographische Systeme – Panchromatisch
(Quelle: Albertz 1991)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
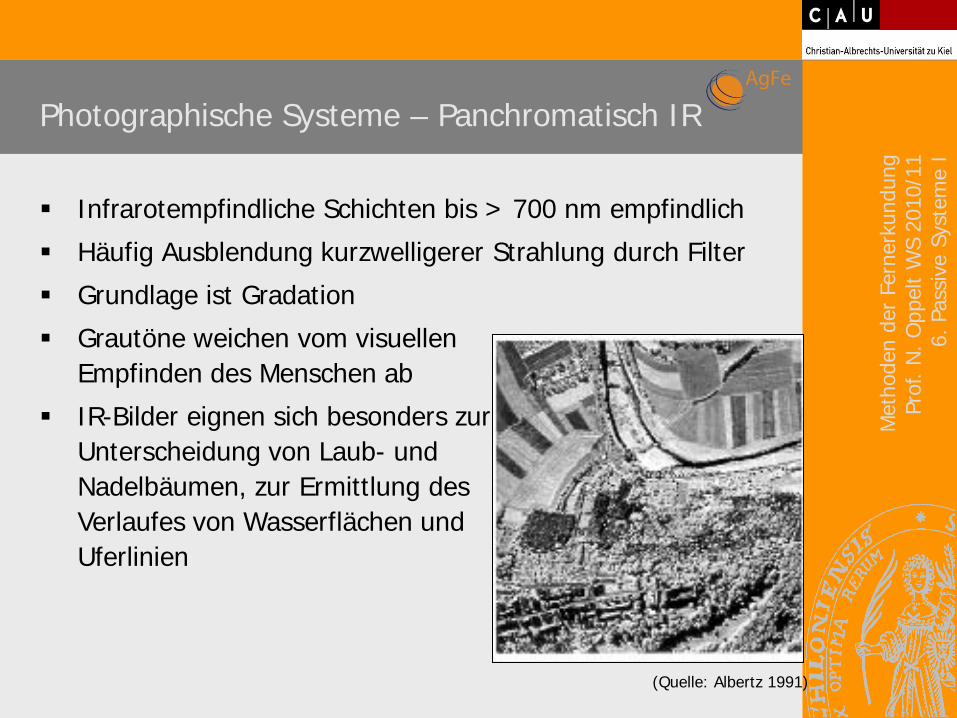
Photographische Systeme – Panchromatisch IR
Infrarotempfindliche Schichten bis > 700 nm empfindlich
Häufig Ausblendung kurzwelligerer Strahlung durch Filter
Grundlage ist Gradation
Grautöne weichen vom visuellen Empfinden des Menschen ab
IR-Bilder eignen sich besonders zur Unterscheidung von Laub- und Nadelbäumen, zur Ermittlung des Verlaufes von Wasserflächen und Uferlinien
(Quelle: Albertz 1991)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
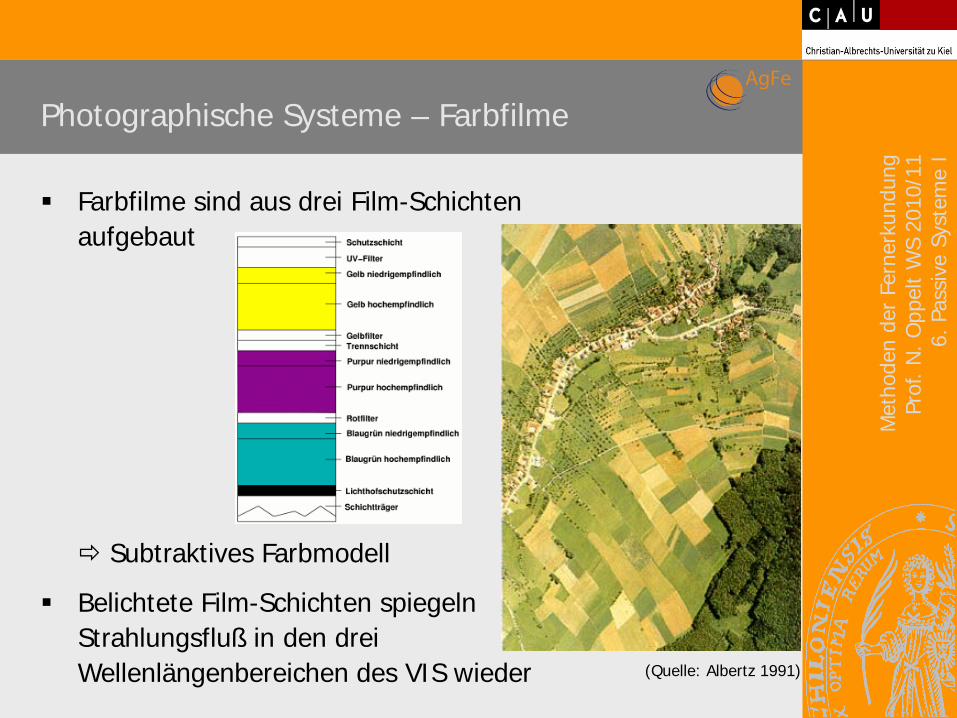
Photographische Systeme – Farbfilme
Farbfilme sind aus drei Film-Schichten aufgebaut
Subtraktives Farbmodell
Belichtete Film-Schichten spiegeln Strahlungsfluß in den drei Wellenlängenbereichen des VIS wieder (Quelle: Albertz 1991)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
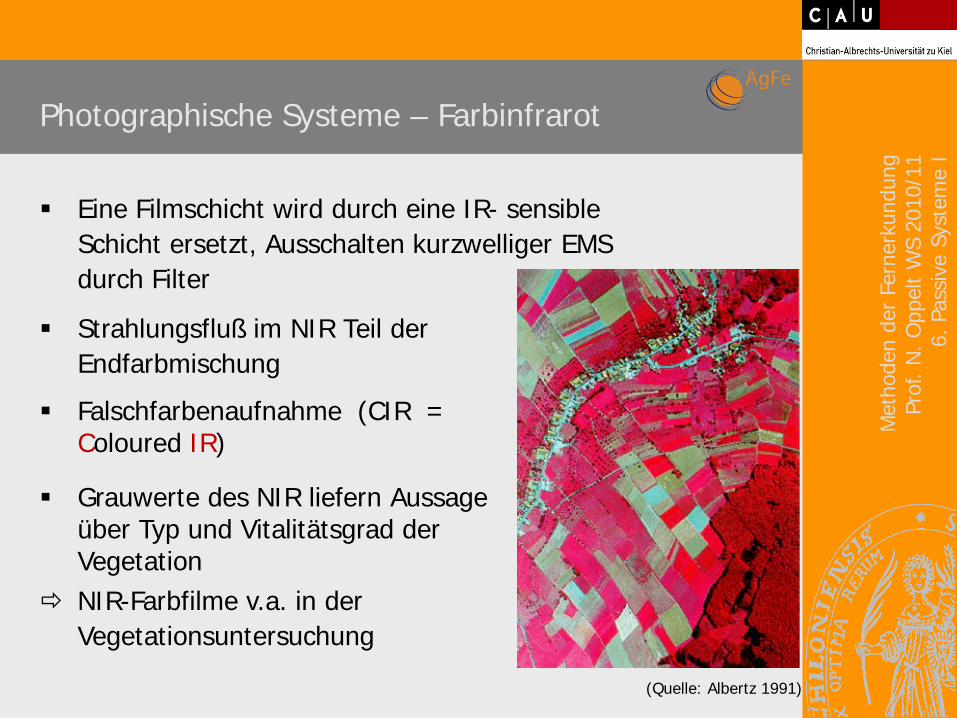
Eine Filmschicht wird durch eine IR- sensible Schicht ersetzt, Ausschalten kurzwelliger EMS durch Filter
Photographische Systeme – Farbinfrarot
(Quelle: Albertz 1991)
Strahlungsfluß im NIR Teil der Endfarbmischung
Falschfarbenaufnahme (CIR = Coloured IR)
Grauwerte des NIR liefern Aussage über Typ und Vitalitätsgrad der Vegetation
NIR-Farbfilme v.a. in der Vegetationsuntersuchung

Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Photographische Systeme – Neuere Entwicklungen
Ende des analogen Zeitalters
Übergang zu digitalen Messkammern auf CCD-Basis
z.B. ADS-Systeme (Airborne Digital Sensor)
(Quelle: Eckhardt 2002)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
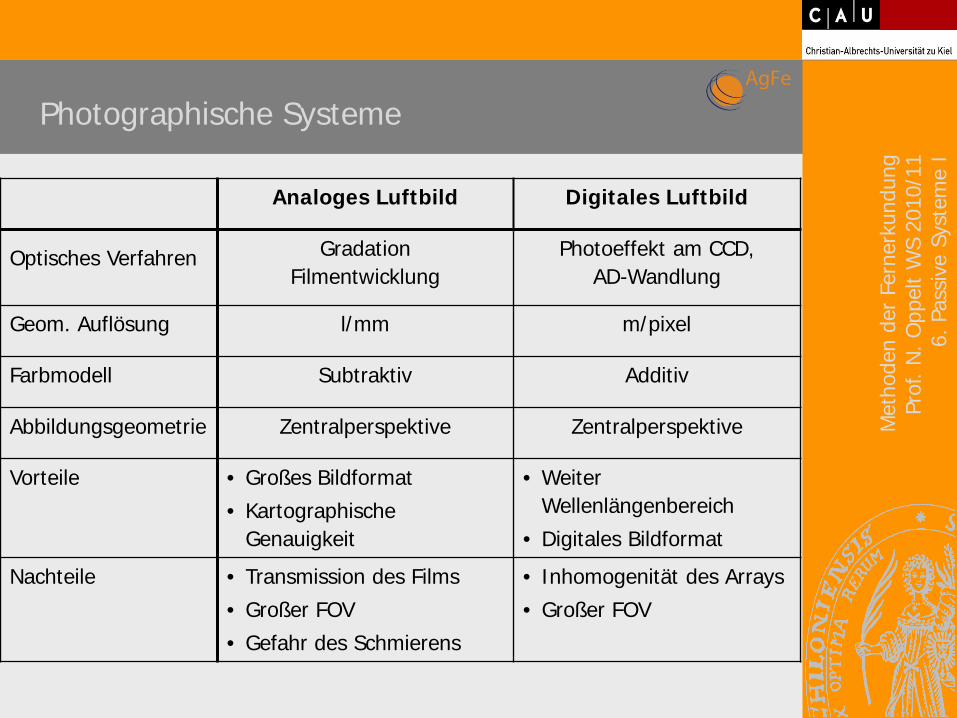
Photographische Systeme
Analoges Luftbild Digitales Luftbild
Optisches Verfahren GradationFilmentwicklung
Photoeffekt am CCD,AD-Wandlung
Geom. Auflösung l/mm m/pixel
Farbmodell Subtraktiv Additiv
Abbildungsgeometrie Zentralperspektive Zentralperspektive
Vorteile • Großes Bildformat
• Kartographische Genauigkeit
• Weiter Wellenlängenbereich
• Digitales Bildformat
Nachteile • Transmission des Films
• Großer FOV
• Gefahr des Schmierens
• Inhomogenität des Arrays
• Großer FOV
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Passive Aufnahmeverfahren
1. Photographische Systeme Kamera Filme und Filter Neue Entwicklungen
2. Digitale Verfahren Opto-mechanische Scanner Opto-elektronische Scanner Array Sensoren
3. Bildgeometrie Allgemein Luftbild Scanner
(Quelle: Albertz, 2001)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
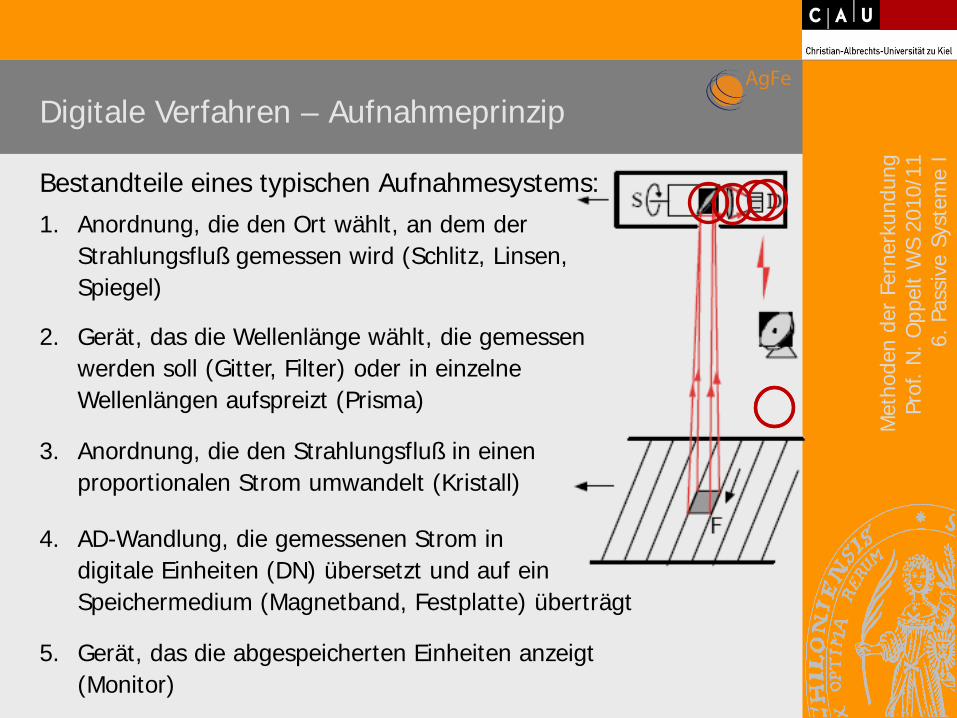
Digitale Verfahren – Aufnahmeprinzip
Bestandteile eines typischen Aufnahmesystems: 1. Anordnung, die den Ort wählt, an dem der
Strahlungsfluß gemessen wird (Schlitz, Linsen, Spiegel)
2. Gerät, das die Wellenlänge wählt, die gemessen werden soll (Gitter, Filter) oder in einzelne Wellenlängen aufspreizt (Prisma)
3. Anordnung, die den Strahlungsfluß in einen proportionalen Strom umwandelt (Kristall)
4. AD-Wandlung, die gemessenen Strom in digitale Einheiten (DN) übersetzt und auf ein Speichermedium (Magnetband, Festplatte) überträgt
5. Gerät, das die abgespeicherten Einheiten anzeigt (Monitor)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Strahlungsfluß wird direkt als elektrischer Impuls gespeichert
Digitales Speichermedium
Radiometrische Auflösung bestimmt Anzahl der möglichen numerischen Grauwerte pro Kanal
Zerlegung der EMS in einzelne Spektralbereiche bzw. Kanäle
Geometrisch identische, aber spektral unterschiedliche Daten in den einzelnen Kanälen
Speicherung jedes Kanals auf separatem Speicherplatz
Bearbeitung der einzelnen Kanäle
Digitale Verfahren – Aufnahmeprinzip
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Vorteile
Differenzierte Abbildung und Analyse der Grauwerte
Digitale Aufzeichnung der Messwerte
Vielfältige Wellenlängenbereiche
Separate Erfassung verschiedener Spektralbereiche in einzelnen Kanälen
Nachteile:
Einzelbeobachtung der Strahlung auf kleinen Bildelemente
Flächenhafte Abbildung größerer Geländeflächen erfordert Zusammenfügung der Bildelemente
Digitalspeicherung und Verarbeitung erfordert digitale Technik zur Bildbearbeitung und -auswertung
Digitale Verfahren – Aufnahmeprinzip

Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Digitale Verfahren – Opto-mechanische Scanner
Rotierendes spiegeloptisches System tastet zeilenweise Erdoberfläche ab
Einfangspiegel rotiert um eine zur Flugbahn parallele Achse
Aufgenommenes Flächensegment (Pixel) wandert quer zur Flugrichtung über das Gelände
Across-Track oder WhiskbroomScanner
z.B. Landsat
(Quelle: Elachi & Zyl 2006)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
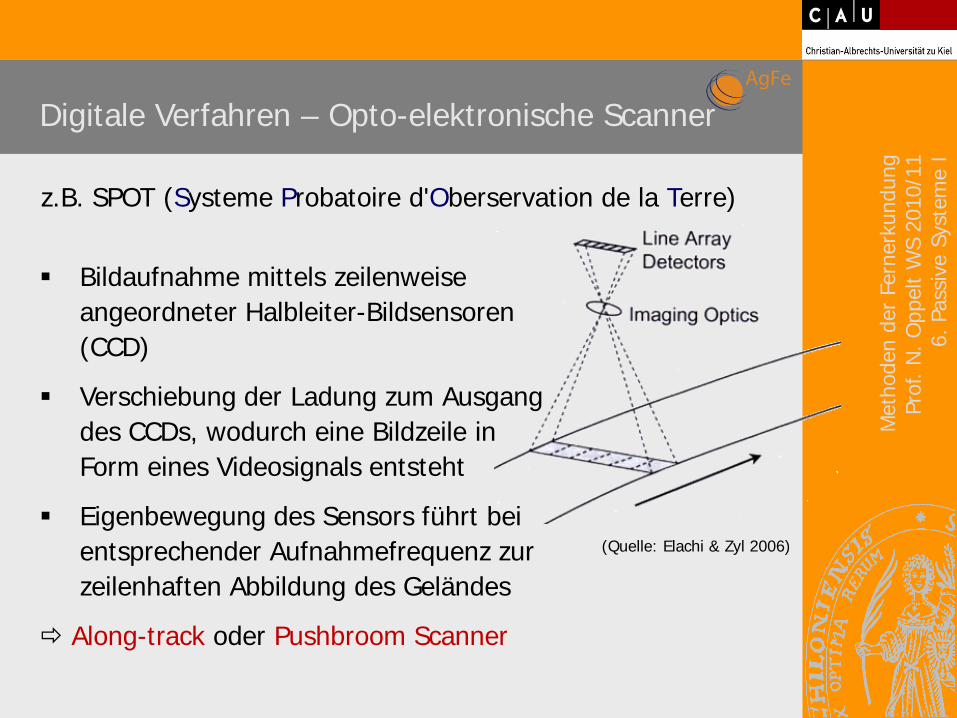
z.B. SPOT (Systeme Probatoire d'Oberservation de la Terre)
Bildaufnahme mittels zeilenweise angeordneter Halbleiter-Bildsensoren (CCD)
Verschiebung der Ladung zum Ausgang des CCDs, wodurch eine Bildzeile in Form eines Videosignals entsteht
Eigenbewegung des Sensors führt bei entsprechender Aufnahmefrequenz zur zeilenhaften Abbildung des Geländes
Along-track oder Pushbroom Scanner
Digitale Verfahren – Opto-elektronische Scanner
(Quelle: Elachi & Zyl 2006)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
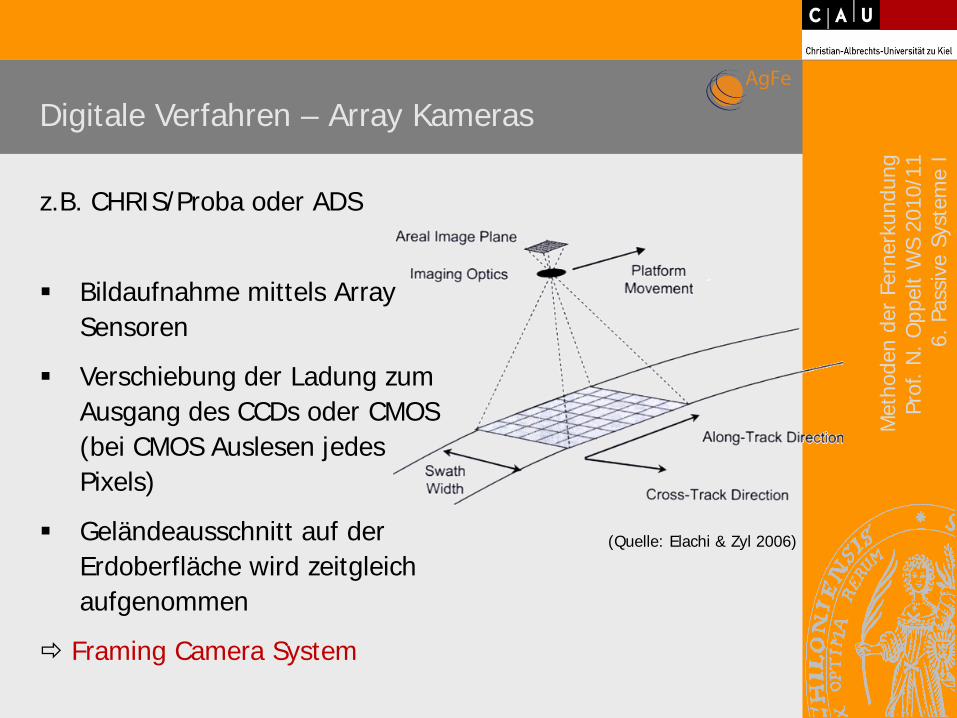
Digitale Verfahren – Array Kameras
Bildaufnahme mittels Array Sensoren
Verschiebung der Ladung zum Ausgang des CCDs oder CMOS (bei CMOS Auslesen jedes Pixels)
Geländeausschnitt auf der Erdoberfläche wird zeitgleich aufgenommen
Framing Camera System
z.B. CHRIS/Proba oder ADS
(Quelle: Elachi & Zyl 2006)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
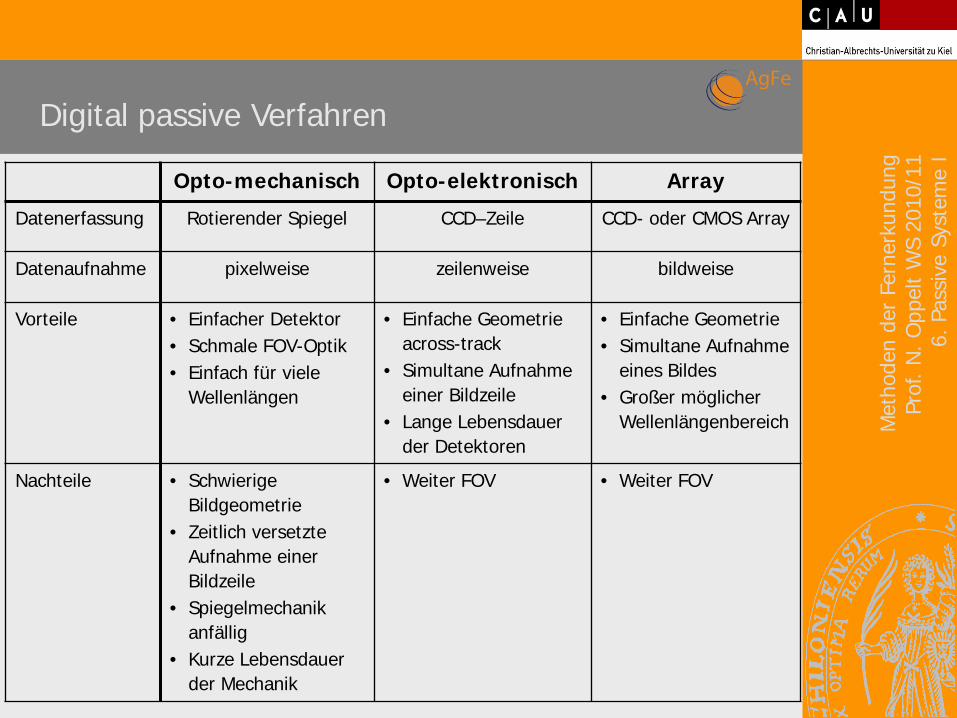
Digital passive Verfahren
Opto-mechanisch Opto-elektronisch Array
Datenerfassung Rotierender Spiegel CCD–Zeile CCD- oder CMOS Array
Datenaufnahme pixelweise zeilenweise bildweise
Vorteile • Einfacher Detektor• Schmale FOV-Optik• Einfach für viele
Wellenlängen
• Einfache Geometrie across-track
• Simultane Aufnahme einer Bildzeile
• Lange Lebensdauer der Detektoren
• Einfache Geometrie• Simultane Aufnahme
eines Bildes• Großer möglicher
Wellenlängenbereich
Nachteile • Schwierige Bildgeometrie
• Zeitlich versetzte Aufnahme einer Bildzeile
• Spiegelmechanik anfällig
• Kurze Lebensdauer der Mechanik
• Weiter FOV • Weiter FOV
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Passive Aufnahmeverfahren
1. Photographische Systeme Kamera Filme und Filter Neue Entwicklungen
2. Digitale Verfahren Opto-mechanische Scanner Opto-elektronische Scanner Array Sensoren
3. Bildgeometrie Allgemein Luftbild Scanner
(Quelle: Albertz, 2001)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
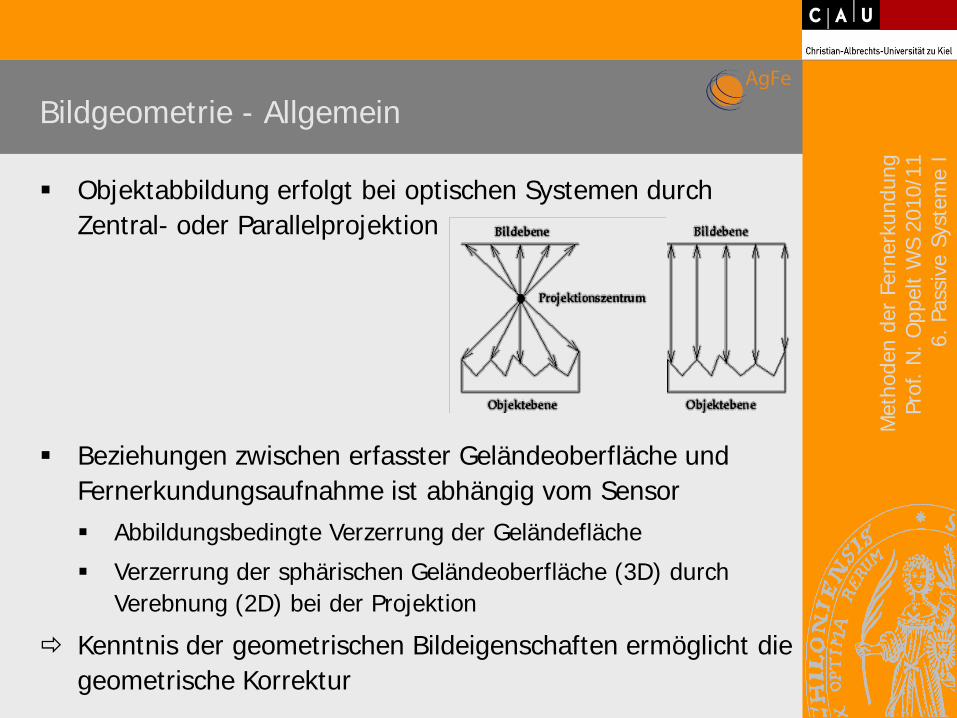
Bildgeometrie - Allgemein
Objektabbildung erfolgt bei optischen Systemen durch Zentral- oder Parallelprojektion
Beziehungen zwischen erfasster Geländeoberfläche und Fernerkundungsaufnahme ist abhängig vom Sensor Abbildungsbedingte Verzerrung der Geländefläche
Verzerrung der sphärischen Geländeoberfläche (3D) durch Verebnung (2D) bei der Projektion
Kenntnis der geometrischen Bildeigenschaften ermöglicht die geometrische Korrektur
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Jedes FE-Bild weist verschiedene geometrische Fehler auf Größe und Ausprägung der Fehler abhängig von Faktoren
wie z.B.:
- Sensoroptik (Perspektive)
- Bewegung(srichtung) des Aufnahmesystems
- Bewegung und Instabilität der Sensorplattform
- Höhe, Ausrichtung und Geschwindigkeit der Sensorplattform
- Geländetopographie
- Erdkrümmung
- Erdrotation
Bildgeometrie - Allgemein
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
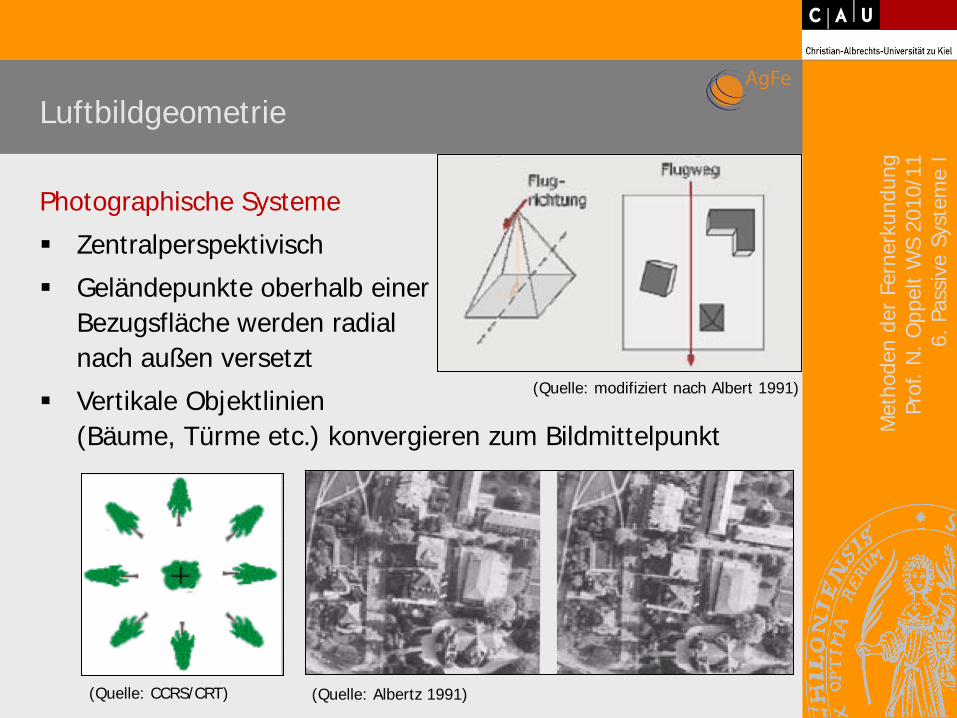
Photographische Systeme
Zentralperspektivisch
Geländepunkte oberhalb einerBezugsfläche werden radial nach außen versetzt
Vertikale Objektlinien (Bäume, Türme etc.) konvergieren zum Bildmittelpunkt
(Quelle: modifiziert nach Albert 1991)
Luftbildgeometrie
(Quelle: Albertz 1991)(Quelle: CCRS/CRT)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
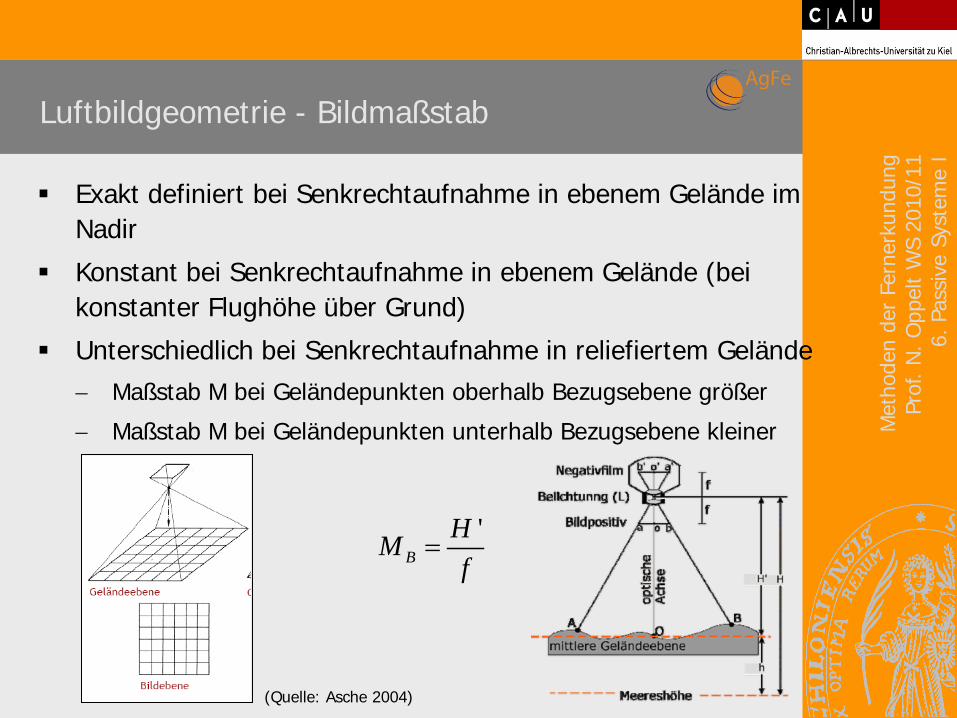
Exakt definiert bei Senkrechtaufnahme in ebenem Gelände im Nadir
Konstant bei Senkrechtaufnahme in ebenem Gelände (bei konstanter Flughöhe über Grund)
Unterschiedlich bei Senkrechtaufnahme in reliefiertem Gelände− Maßstab M bei Geländepunkten oberhalb Bezugsebene größer
− Maßstab M bei Geländepunkten unterhalb Bezugsebene kleiner
'B
HMf
=
(Quelle: Asche 2004)
Luftbildgeometrie - Bildmaßstab
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Luftbildgeometrie - Bildmaßstab
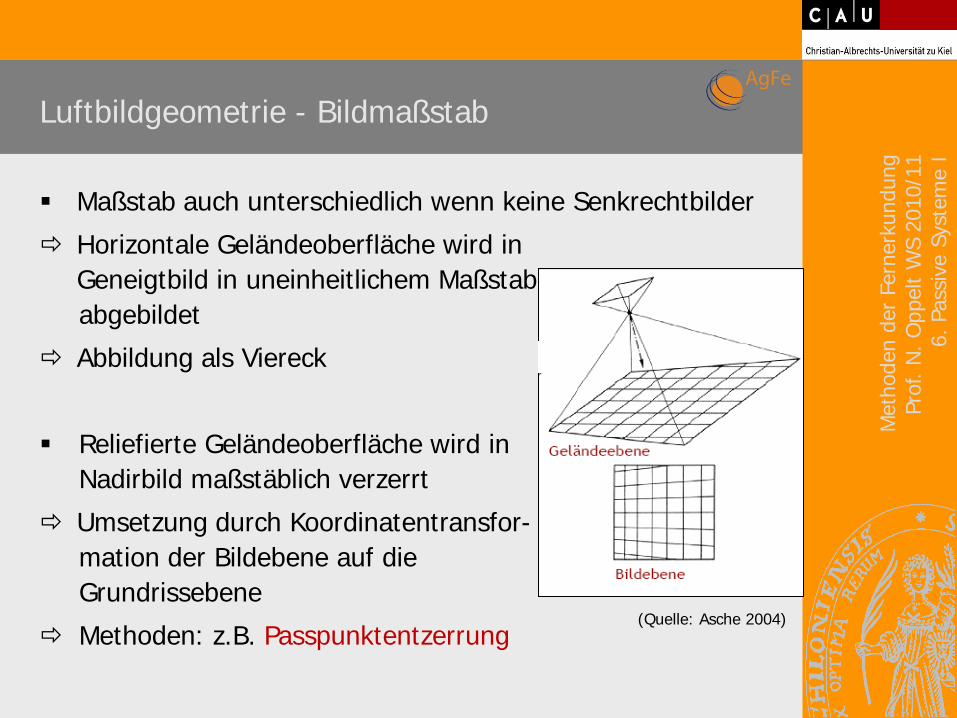
Maßstab auch unterschiedlich wenn keine Senkrechtbilder
Horizontale Geländeoberfläche wird inGeneigtbild in uneinheitlichem Maßstababgebildet
Abbildung als Viereck
Reliefierte Geländeoberfläche wird inNadirbild maßstäblich verzerrt
Umsetzung durch Koordinatentransfor-mation der Bildebene auf die Grundrissebene
Methoden: z.B. Passpunktentzerrung(Quelle: Asche 2004)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Jedes FE-Bild weist verschiedene geometrische Fehler auf Größe und Ausprägung der Fehler abhängig von Faktoren
wie z.B.:
- Sensoroptik (Zentral vs Parallelprojektion)
- Bewegung(srichtung) des Aufnahmesystems
- Bewegung und Instabilität der Sensorplattform
- Höhe, Ausrichtung und Geschwindigkeit der Sensorplattform
- Geländetopographie
- Erdkrümmung
- Erdrotation
Scannergeometrie - Allgemein
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
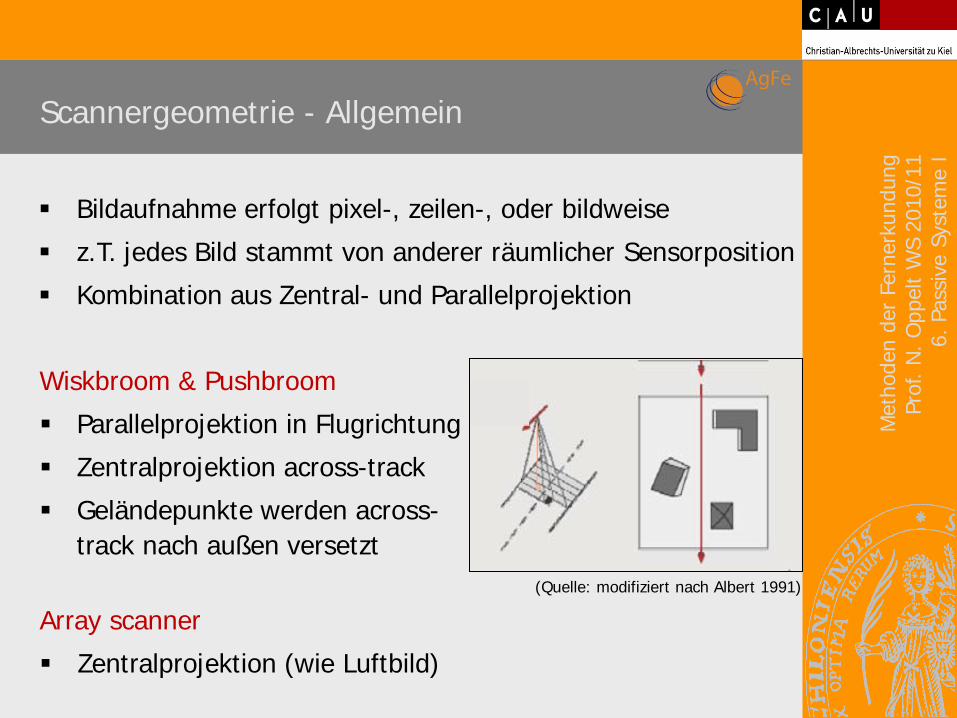
Bildaufnahme erfolgt pixel-, zeilen-, oder bildweise
z.T. jedes Bild stammt von anderer räumlicher Sensorposition
Kombination aus Zentral- und Parallelprojektion
Array scanner
Zentralprojektion (wie Luftbild)
Scannergeometrie - Allgemein
(Quelle: modifiziert nach Albert 1991)
Wiskbroom & Pushbroom
Parallelprojektion in Flugrichtung
Zentralprojektion across-track
Geländepunkte werden across-track nach außen versetzt
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Zwei Möglichkeiten zur Berechnung des mittleren Bildmaßstabes
1. Vergleich einer Strecke (Karte, gemessen) mit der Anzahl der Pixel im Bild
2. Berechnung über den IFOV
Scannergeometrie - Bildmaßstab
NxB=
hIFOVB *=
B = Pixelgröße [m]X = gemessene Strecke [m]N = Anzahl der Pixel
IFOV = IFOV [rad]h = Flughöhe [m]
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
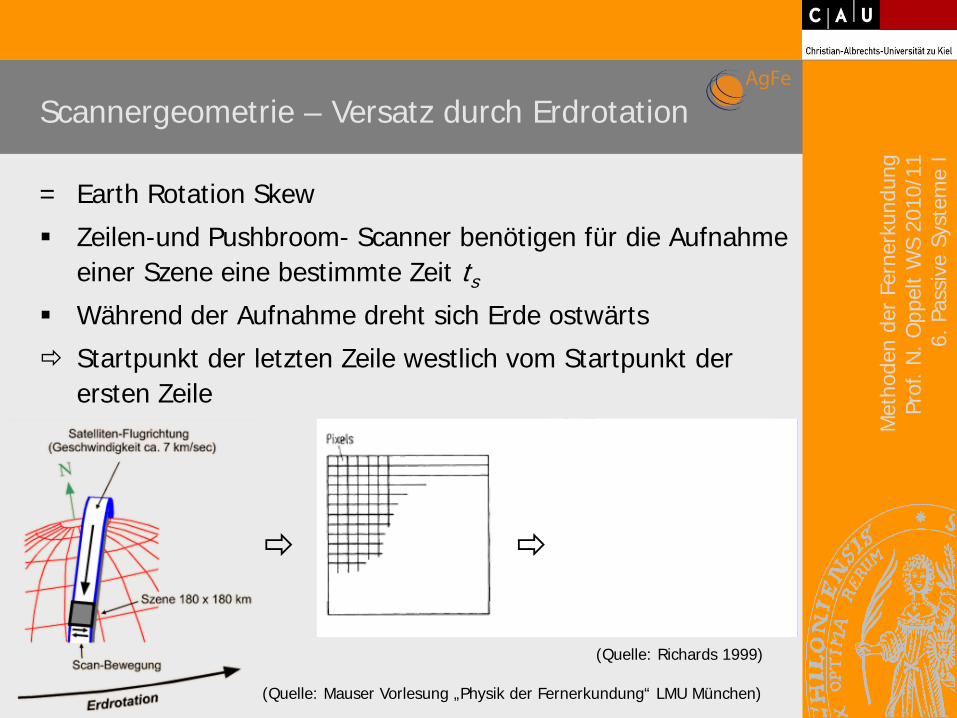
Scannergeometrie – Versatz durch Erdrotation
= Earth Rotation Skew
Zeilen-und Pushbroom- Scanner benötigen für die Aufnahme einer Szene eine bestimmte Zeit ts
Während der Aufnahme dreht sich Erde ostwärts
Startpunkt der letzten Zeile westlich vom Startpunkt der ersten Zeile
(Quelle: Mauser Vorlesung „Physik der Fernerkundung“ LMU München)
(Quelle: Richards 1999)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
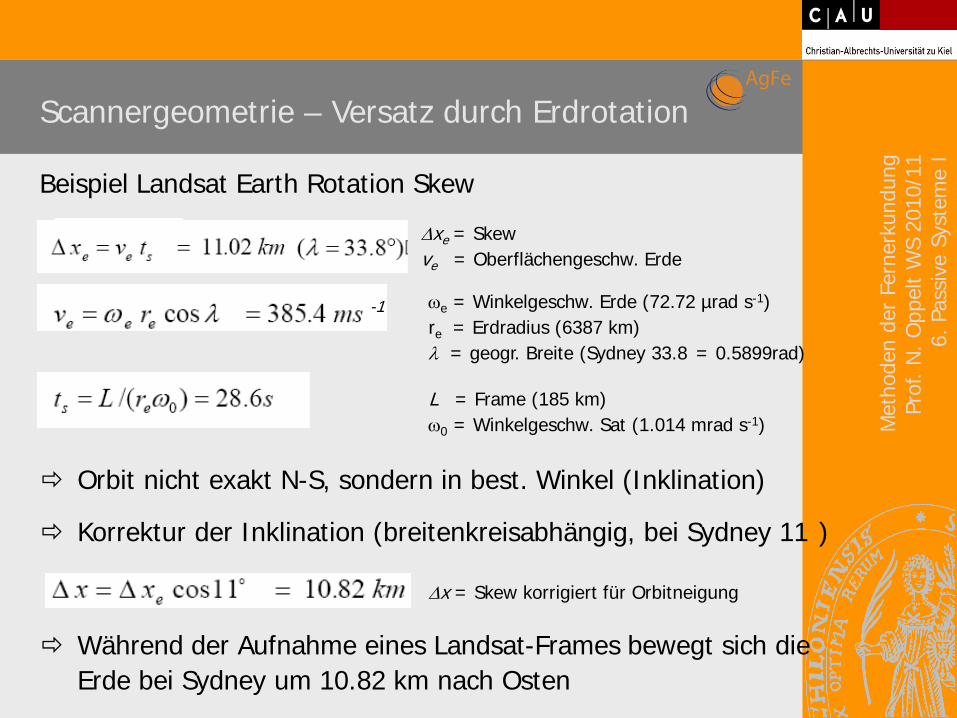
Orbit nicht exakt N-S, sondern in best. Winkel (Inklination)
Beispiel Landsat Earth Rotation Skew
L = Frame (185 km)ω0 = Winkelgeschw. Sat (1.014 mrad s-1)
∆xe = Skewve = Oberflächengeschw. Erde
Während der Aufnahme eines Landsat-Frames bewegt sich die Erde bei Sydney um 10.82 km nach Osten
Korrektur der Inklination (breitenkreisabhängig, bei Sydney 11 )
∆x = Skew korrigiert für Orbitneigung
ωe = Winkelgeschw. Erde (72.72 µrad s-1)re = Erdradius (6387 km)λ = geogr. Breite (Sydney 33.8 = 0.5899rad)
-1
Scannergeometrie – Versatz durch Erdrotation
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
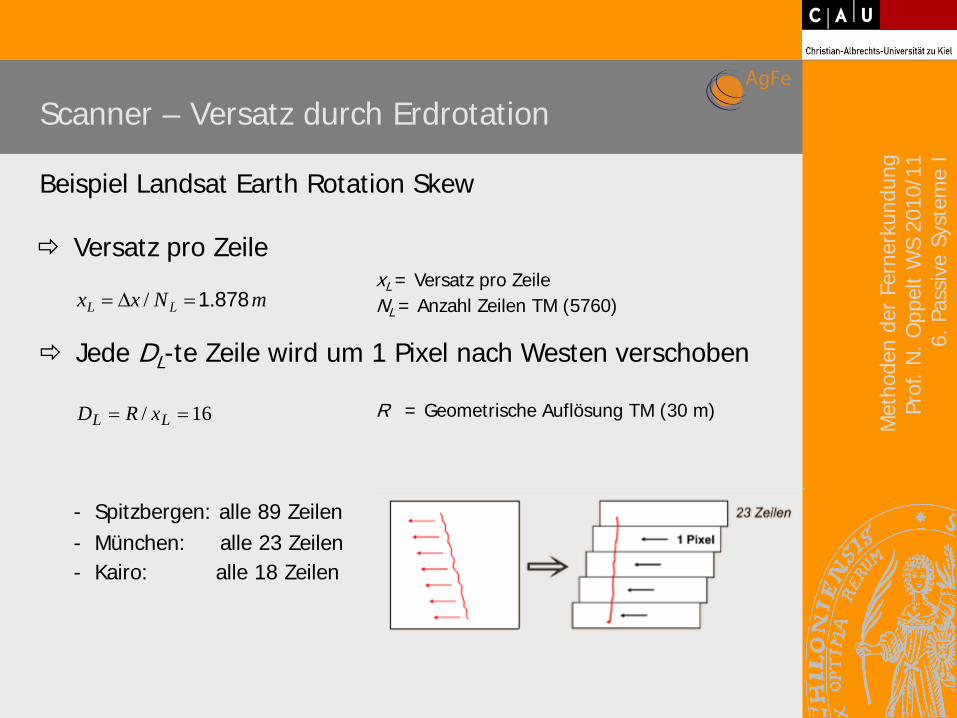
Scanner – Versatz durch Erdrotation
xL = Versatz pro ZeileNL = Anzahl Zeilen TM (5760)
- Spitzbergen: alle 89 Zeilen- München: alle 23 Zeilen - Kairo: alle 18 Zeilen
Versatz pro Zeile
mNxx LL 8781./ =∆=
16/ == LL xRD
Jede DL-te Zeile wird um 1 Pixel nach Westen verschoben
R = Geometrische Auflösung TM (30 m)
Beispiel Landsat Earth Rotation Skew
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
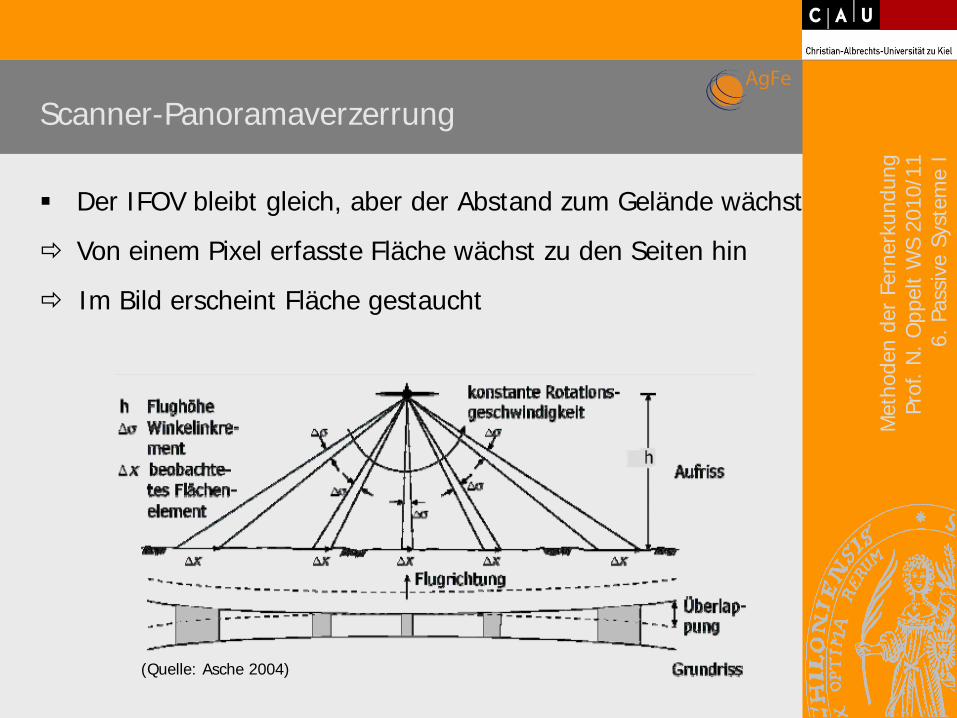
Scanner-Panoramaverzerrung
(Quelle: Asche 2004)
Der IFOV bleibt gleich, aber der Abstand zum Gelände wächst
Von einem Pixel erfasste Fläche wächst zu den Seiten hin
Im Bild erscheint Fläche gestaucht
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
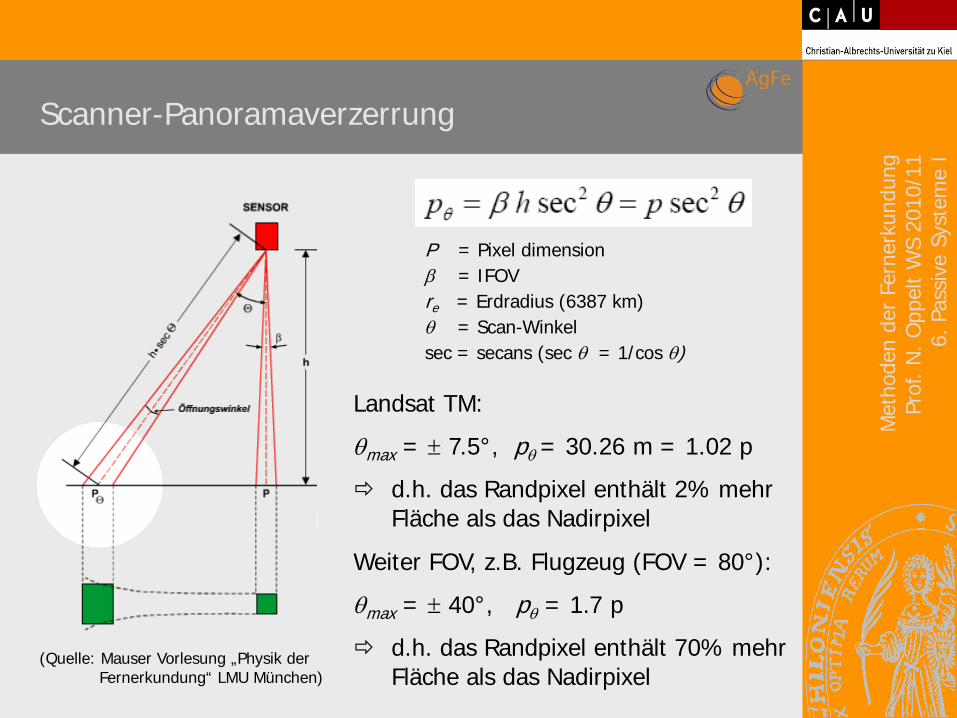
(Quelle: Mauser Vorlesung „Physik der Fernerkundung“ LMU München)
P = Pixel dimensionβ = IFOV re = Erdradius (6387 km)θ = Scan-Winkelsec = secans (sec θ = 1/cos θ)
Landsat TM:
θmax = ± 7.5°, pθ = 30.26 m = 1.02 p
d.h. das Randpixel enthält 2% mehr Fläche als das Nadirpixel
Weiter FOV, z.B. Flugzeug (FOV = 80°):
θmax = ± 40°, pθ = 1.7 p
d.h. das Randpixel enthält 70% mehr Fläche als das Nadirpixel
Scanner-Panoramaverzerrung
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
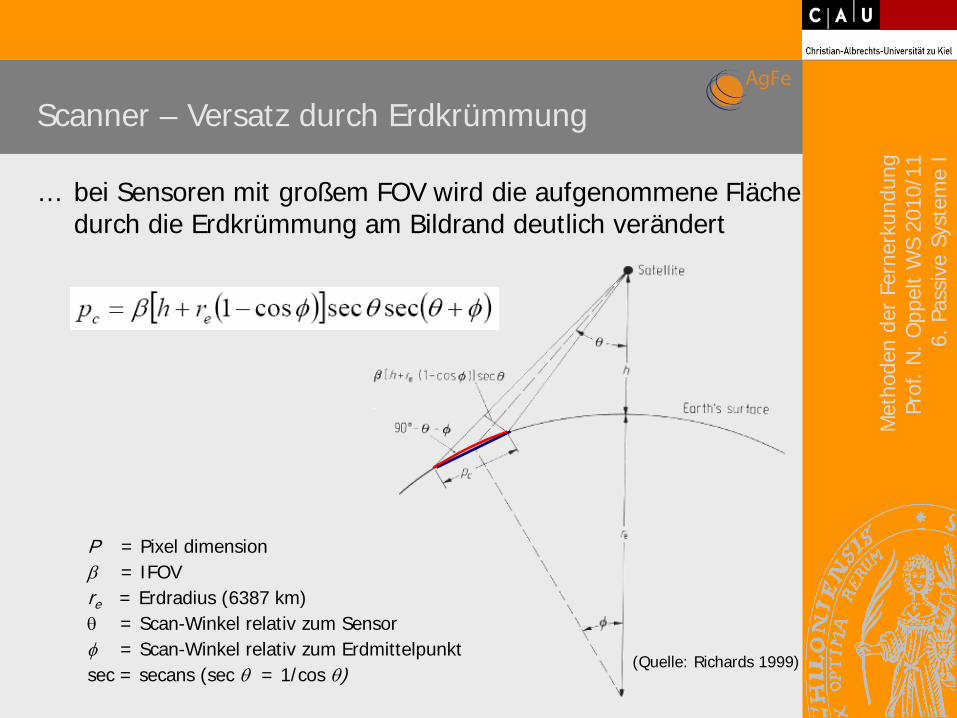
Scanner – Versatz durch Erdkrümmung
… bei Sensoren mit großem FOV wird die aufgenommene Fläche durch die Erdkrümmung am Bildrand deutlich verändert
(Quelle: Richards 1999)
P = Pixel dimensionβ = IFOV re = Erdradius (6387 km)θ = Scan-Winkel relativ zum Sensorφ = Scan-Winkel relativ zum Erdmittelpunktsec = secans (sec θ = 1/cos θ)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
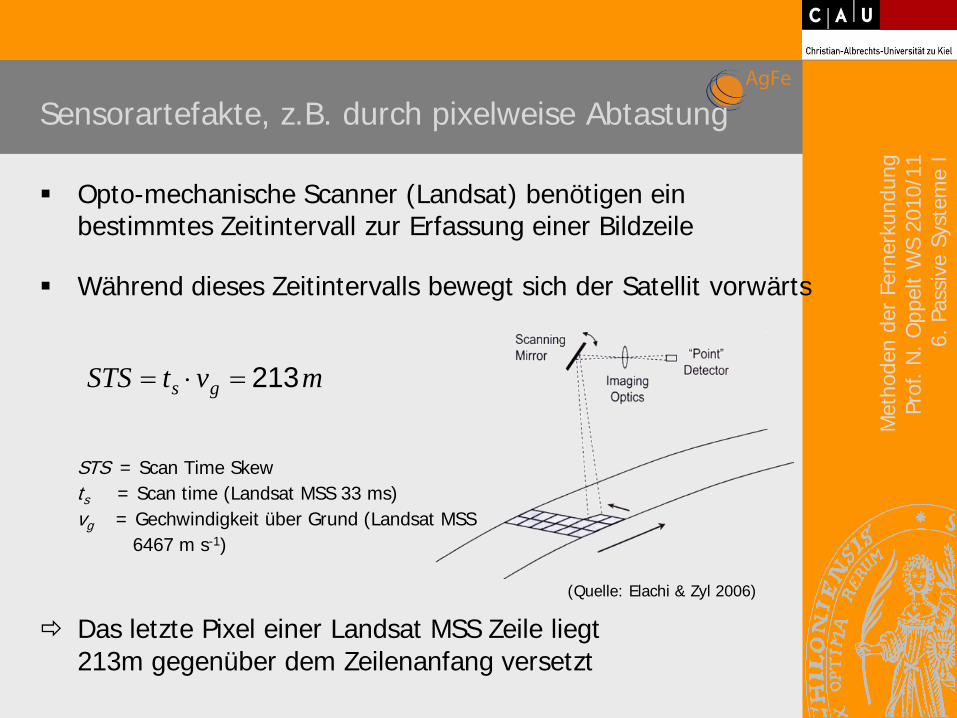
Sensorartefakte, z.B. durch pixelweise Abtastung
Opto-mechanische Scanner (Landsat) benötigen ein bestimmtes Zeitintervall zur Erfassung einer Bildzeile
(Quelle: Elachi & Zyl 2006)
Während dieses Zeitintervalls bewegt sich der Satellit vorwärts
mvtSTS gs 213=⋅=
STS = Scan Time Skewts = Scan time (Landsat MSS 33 ms)vg = Gechwindigkeit über Grund (Landsat MSS
6467 m s-1)
Das letzte Pixel einer Landsat MSS Zeile liegt 213m gegenüber dem Zeilenanfang versetzt
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
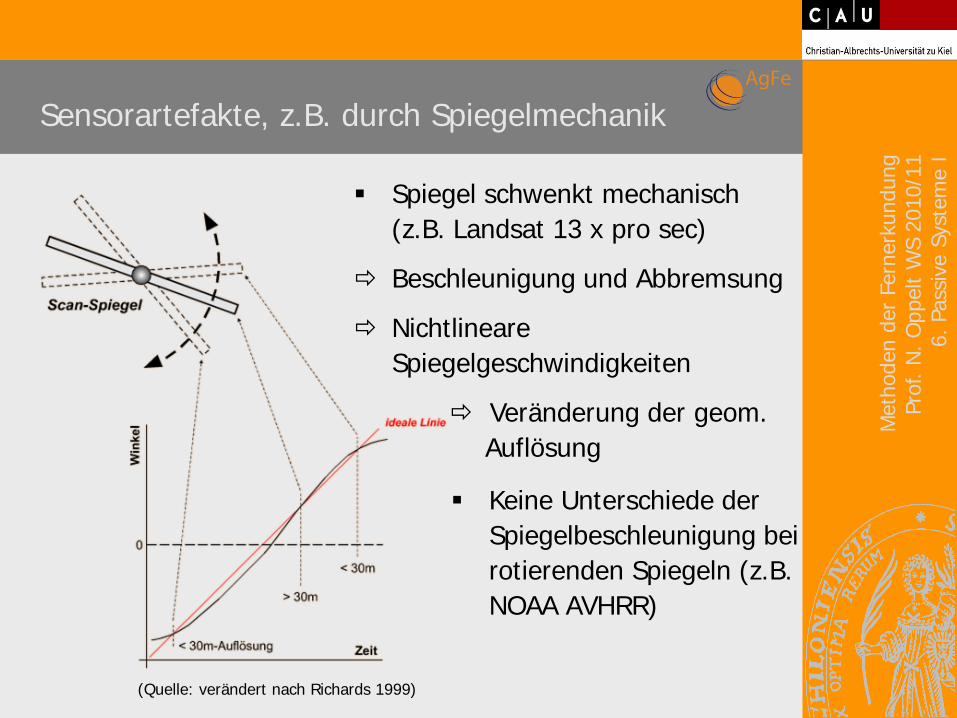
(Quelle: verändert nach Richards 1999)
Spiegel schwenkt mechanisch (z.B. Landsat 13 x pro sec)
Beschleunigung und Abbremsung
Nichtlineare Spiegelgeschwindigkeiten
Veränderung der geom. Auflösung
Keine Unterschiede der Spiegelbeschleunigung bei rotierenden Spiegeln (z.B. NOAA AVHRR)
Sensorartefakte, z.B. durch Spiegelmechanik
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
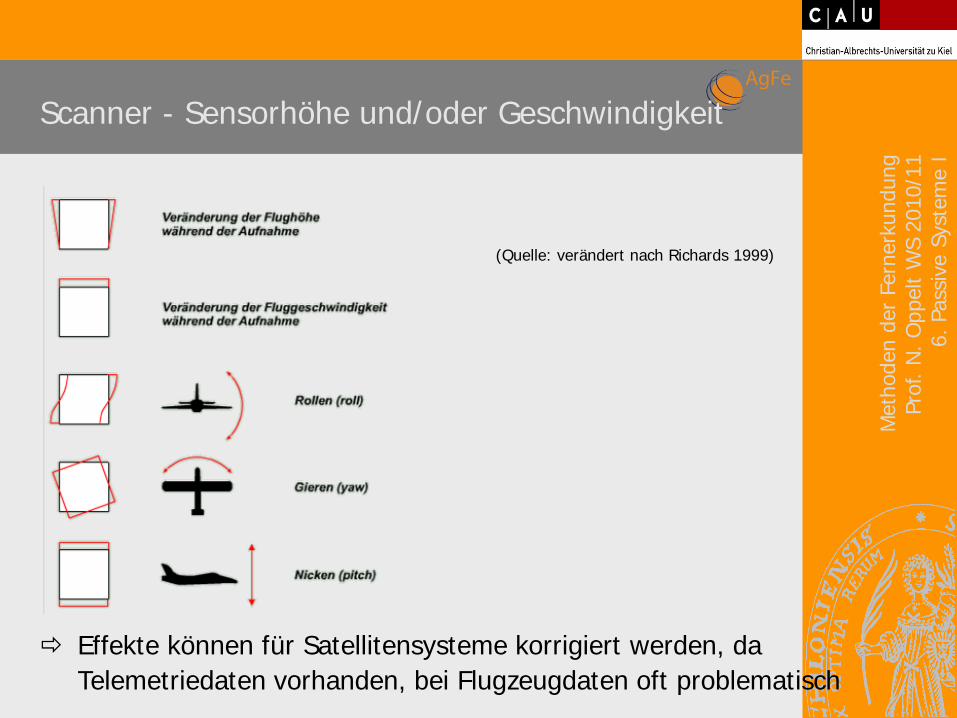
Scanner - Sensorhöhe und/oder Geschwindigkeit
Effekte können für Satellitensysteme korrigiert werden, daTelemetriedaten vorhanden, bei Flugzeugdaten oft problematisch
(Quelle: verändert nach Richards 1999)
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
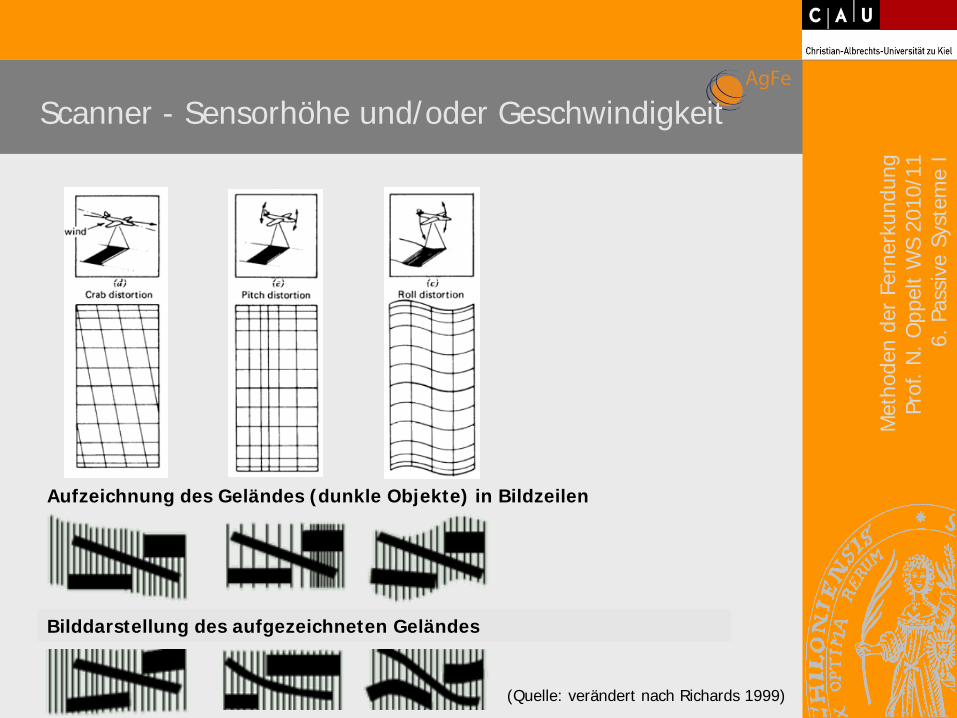
Aufzeichnung des Geländes (dunkle Objekte) in Bildzeilen
Bilddarstellung des aufgezeichneten Geländes
(Quelle: verändert nach Richards 1999)
Scanner - Sensorhöhe und/oder Geschwindigkeit

Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Overlay AVIS - IKONOS 1m
Scanner - Sensorhöhe und/oder Geschwindigkeit
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
Verzerrung = Lageveränderung der Flächenelemente einer Fernerkundungsaufnahme bei der Abbildung durch optisches System
Entzerrungprojektive Transformation eines Bildes bzw. Bildteils auf eine Ebene (Grundrissebene) Methode: Einpassen eines Bildes auf Passpunkte (z.B. Karte) oder differenziell
Keine Lagetreue, keine Längentreue, keine Flächentreue
Georeferenzierung
Bildgeometrie – Korrektur
Met
hode
n de
r Fe
rner
kund
ung
Prof
. N
. Opp
elt
WS
2010
/11
6. P
assi
ve S
yste
me
I
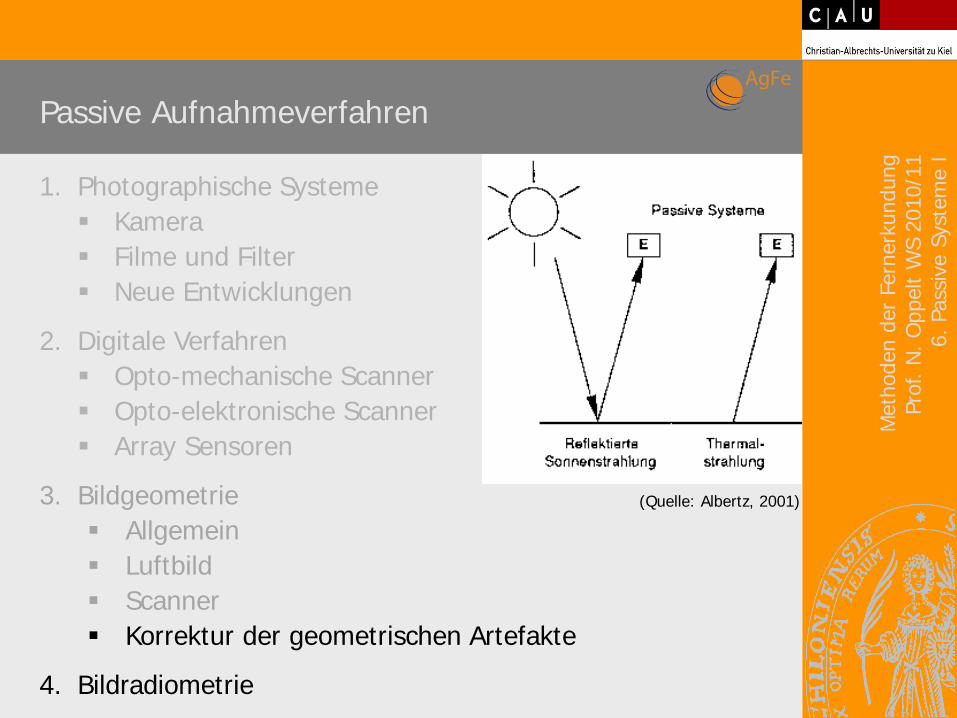
Passive Aufnahmeverfahren
1. Photographische Systeme Kamera Filme und Filter Neue Entwicklungen
2. Digitale Verfahren Opto-mechanische Scanner Opto-elektronische Scanner Array Sensoren
3. Bildgeometrie Allgemein Luftbild Scanner Korrektur der geometrischen Artefakte
4. Bildradiometrie
(Quelle: Albertz, 2001)
Recommended

















