5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 1/55
11
1X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Métodos de observación
Jose Antonio Sánchez Sobrino
Instituto Geográfico Nacional

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 2/55
22
2X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Clasificación de los métodos de observaciónLa elección del método dependerá fundamentalmente de:
Equipo disponible
Precisión final que se quiere alcanzar Relación de costes (rendimiento)
Clasificación en función de muchas variables:
En función del observable utilizado Código (metros) Código y Fase (centímetros, milímetros)
En función del movimiento del receptor
Estático, receptores no móviles (mayor precisión y tiempo) Cinemático, receptor se desplaza durante la observación
Híbridos, combina los dos anteriores

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 3/55
33
3X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Clasificación de los métodos de observación
En función del tipo de solución
Posicionamiento absoluto: coordenadas de un punto aislado, (X, Y, Z).En general, precisión de metros, excepto PPP.
Posicionamiento relativo o diferencial: coord. de un punto respecto otro,
(∆X, ∆Y, ∆Z).
En general, precisión de mm o cm.
En función de la disponibilidad de la solución
Tiempo Real, cálculo y solución en campo. Post-proceso, cálculo y solución a posteriori, en oficina.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 4/55
44 4X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Clasificación de los métodos de observaciónTres grupos principales mezclando los conceptos anteriores:
1.- Navegación autónoma = Posicionamiento Absoluto por código,
empleando sólo un receptor simple. Precisión: 5 – 10 m (sin SA).
Navegación
2.- GPS Diferencial por Código = DGPS, exige corrección (a laspseudodistancias o a las coordenadas). Precisión 0,5 – 5 m.
Navegación costera, adquisición de datos para SIG, inventarios georreferenciados, revisión decartografía de escalas medias (1:10.000, 1:25.000, 1:50.000), agricultura automatizada,
movimienos de maquinaria de obra civil, …
3.- Posicionamiento Diferencial de Fase, Precisión 0,1 m - 5 mm.
Geodesia, Topografía, Geodinámica, control deformaciones, control preciso de maquinaria
automática...

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 5/5555 5X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Es la técnica más sencilla empleada por los receptores GPS paraproporcionar instantáneamente al usuario la posición y/o tiempo.
Un único receptor: solución de la intersección de todas las pseudodistanciasde código (C/A) receptor-satélite sobre el lugar de estación.
Precisión nominal: 5 – 10 m (sin SA).
La medida y la solución directas en t real o por solución MMCC.
Posición en coordenadas absolutas y en el sistema de referencia al que estánreferidos los satélites.
Receptores bajo coste: navegación, aplicaciones poca exigencia precisión.
Posicionamiento absoluto con código

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 6/5566 6X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Dos receptores (al menos) simultáneamente observando satélites comunes,para establecer las ecuaciones de simples y dobles diferencias.
Uno ha de estar en un punto de coordenadas conocidas o bien asignarleunas aleatorias, pero consideradas fijas.
Se determinan los incrementos de coordenadas.
Ventaja: eliminación de errores, especialmente el retardo ionosférico ytroposférico, si consideramos de la misma magnitud en el mismo instante deobservación en puntos no muy alejados.
Combinaciones en f del observable, movimiento o no de los receptores, etc.
Posicionamiento relativo o diferencial

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 7/5577 7X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Estación Base
Vector diferencia entrePosición verdadera yposición GPS
Posiciónverdadera(conocida)
Posición
verdadera(corregida)
Posición GPS
Móvil
PosiciónGPSVector diferencialobtenido en laEstación Base yaplicado a laposición del Móvil
Posicionamiento diferencial: fundamento

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 8/5588 8X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Prácticamente se eliminan:
Errores de reloj SV
Error orbitalSA (antes)
Se disminuyen considerablemente:
Efecto de la ionosfera
Efecto de la troposfera
Se mantiene:
Multipath (código mucho mayor)
Ruido del receptor

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 9/5599 9X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Posicionamiento diferencial: clasificación Según tipo de corrección aplicada:
- Pseudodistancias
- Coordenadas
Según el proceso:
- Directa
- Inversa
Según disponibilidad o no instantánea:
- Post-proceso
- Tiempo real (RTK)
Según observable:
- Código (tradicionalmente DGPS)- Código y Fase
- Transmisión de diferencia de fase (RTK)
(En general, combinación de varias)

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 10/551010 10X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Corrección de pseudodistancia
La "estación base" genera una corrección para cada una de las pseudodistanciasobservadas (PRC - Pseudo Range Correction) y su variación con el tiempo (RRCRange Rate Correction), época a época, para los satélites observados.
El equipo móvil aplica estas correcciones sobre los satélites que esté utilizando paracalcular su posición. Este es el método más correcto.
Corrección por posición
Se calcula la diferencia de latitud, longitud y altura elipsoidal en la "estación base"para aplicársela al móvil.
Es el método más sencillo pero inconveniente de que sólo si en la base y el el móvil seusan los mismos satélites (constelación idéntica) puede considerarse correcta.
Corrección diferencial inversa
Se suele aplicar en control de flotas.
Los datos recogidos por los móviles se envían a un centro de control que dispone decorrecciones diferenciales y las aplica a todos ellos obteniendo su posición corregida.
En este tipo de tecnología el móvil suele desconocer su posición corregida.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 11/551111 11X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Corrección en post-proceso
Puntoconocido
Punto alevantar

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 12/551212 12X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Punto
conocido
Corrección en tiempo real
Punto a determinar

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 13/551313 13X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Dos grandes grupos: con código y con fase (mayor o menor precisión).
Posicionamiento relativo o diferencial con código (DGPS)
Resolviendo sistemas en simples diferencias de código, donde lasincógnitas son las coordenadas de los puntos y estado de reloj de receptores.
Los resultados obtenidos con este método de posicionamiento sonsatisfactorios incluso con distancias mayores de 200 Km.
Posicionamiento diferencial: DGPS
Las aplicaciones más comunes del DGPS con código son:
Navegación de precisión.
Levantamientos y apoyo para cartografías de escalas menores de 1/25000.
Confección y actualización de sistemas de información geográfica. Todo trabajo en general que no requiera precisiones > 1-2 m.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 14/551414 14X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Posición del receptor móvil B en relación
con el receptor referencia A.
Las coordenadas de la estación de
referencia A son conocidas.
Se recogen datos de 4 o más satélites en
ambos receptores.
Elimina el error de los satélites y los
receptores.
Minimiza los retardos atmosféricos.
Precisión 5 mm + 1 ppm con fase.Post-proceso ó Tiempo real, Estático o
Cinemático.
Baselinea o V ect or GP S
B B AA
Posicionamiento relativo o diferencial con fase
5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 15/551515 15X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
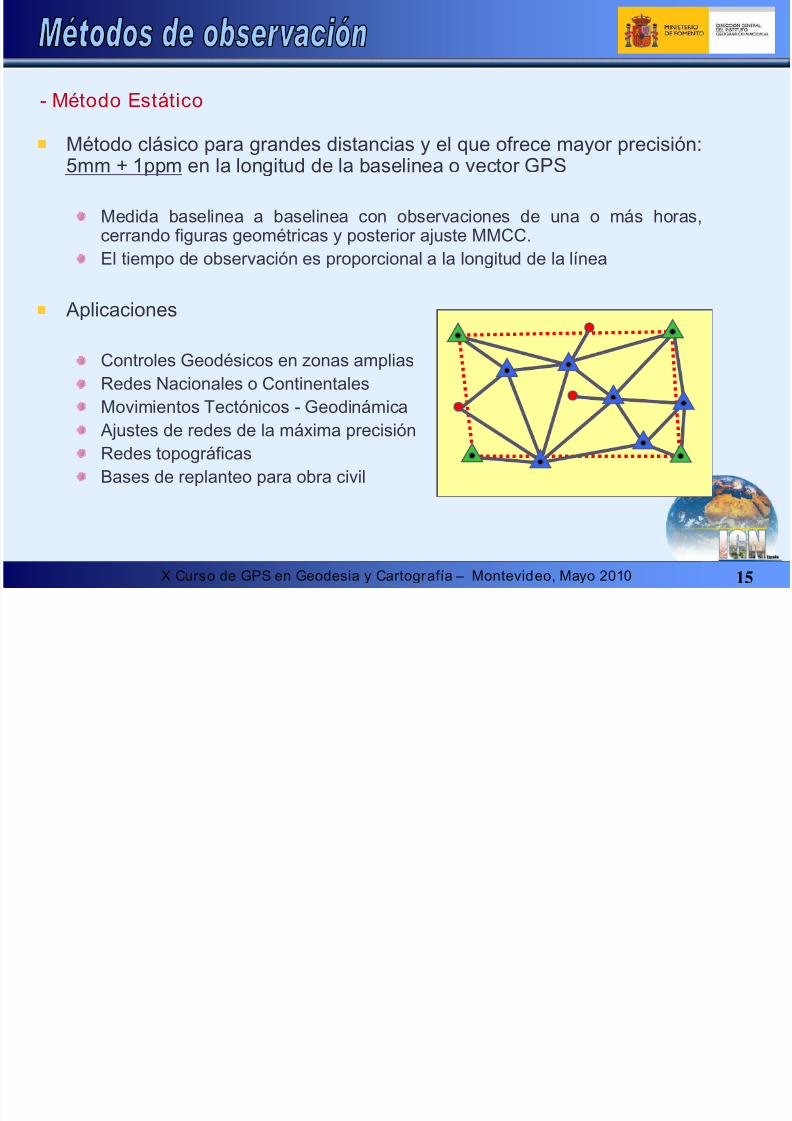
- Método Estático
Método clásico para grandes distancias y el que ofrece mayor precisión:5mm + 1ppm en la longitud de la baselinea o vector GPS
Medida baselinea a baselinea con observaciones de una o más horas,cerrando figuras geométricas y posterior ajuste MMCC.
El tiempo de observación es proporcional a la longitud de la línea
Aplicaciones
Controles Geodésicos en zonas amplias
Redes Nacionales o Continentales
Movimientos Tectónicos - GeodinámicaAjustes de redes de la máxima precisión
Redes topográficas
Bases de replanteo para obra civil

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 16/551616 16X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
- Método Estático Rápido
Observación en periodos cortos de tiempo (minutos)
Longitud máxima de baselinea: 20 - 25 Km.
Algoritmos simplificados de resolución de la ambigüedad inicial (FARA).
Precisión 10-30 mm +1ppm
Aplicaciones
Levantamientos de Control, Inventarios, GIS, levantamientos de detalle.
Reemplaza a las poligonales y las pequeñas triangulaciones locales.
Ventajas: Rapidez, facilidad, eficiencia.
Ideal para pequeñas distancias
Con el RTK, ha perdido uso.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 17/55
1717 17X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Se disminuyen los intervalos de medida que se usan en el estático (de 15, 20o 30 segundos se suele pasar a 1 o 3 segundos).
La ventaja del método es que es sencillo, rápido y preciso.
No requiere mantener el contacto con los satélites entre estaciones: idealpara redes o levantamientos en pequeñas distancias.
Dos modalidades a su vez dentro de este:
a) Modo estático rápido ocupando sólo una estación.b) Modo estático rápido reocupando una segunda estación al cabo de más omenos una hora.
En el modo a) se requieren técnicas rápidas de resolución de ambigüedades.
Tiempos de observación de unos 5-10 minutos.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 18/55
1818 18X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Estático Rápido
Paso 1
Estacionar receptor referencia en la estación “BASE” de
coordenadas conocidasInstalar una nueva estación “Ref2” con otro receptor.
BASERef2
4
3
Ref3
2 1
67
5

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 19/55
1919 19X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Paso 2
Usar las estaciones “BASE” y “Ref2” como Estaciones de Referencia
Con un tercer receptor estacionar en los puntos 1,2,3 y 4.
BASERef2
4
3
2
1
Ref3
6 75

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 20/55
2020 20X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Paso 3
Cuando se llega al límite de distancia del método se cambian lasreferencias
Estacionar el receptor referencia en un punto ya levantado: “4”
Establecer una nueva estación “Ref3” con un receptor móvil
BASERef2
Ref3
4
3
2 1
7 6
5

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 21/55
2121 21X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Paso 4
Usar las estaciones “4” y “Ref3” como Estaciones Referencia
Con la tercera unidad, levantar las estaciones 3, 5, 6 y 7
BASERef2
Ref3
7 6
5
4
3
21

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 22/55
2222 22X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
- Método "Stop and Go" o semicinemático
Resolución de ambigüedades inicial en el punto (de coordenadasconocidas o no), y a partir de ahí, nos movemos al resto.
El procedimiento se mantendrá hasta completar el trabajo o hasta sufriruna pérdida de señal que obligue a inicializar otra vez.
Precisión del método: 1 - 5 cm. (dependiendo L1 o L1&L2 y distancia).
La medición cinemática puede ser entendida como "la transferenciade ambigüedades de una estación a otra".

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 23/55
2323 23X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Stop and Go (Parar y Seguir)Paso 1: Modo Stop
Antes de empezar hay que resolver la ambigüedadinicial
Existen tres variantes para resolverla:
Inicialización Estática
Inicialización en un punto conocido, inicializador
Antena Swap Inicialización Estáticadel receptor móvil = Resolución de
Ambigüedad Inicial enPostproceso
Estación Referencia
5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 24/55
2424 24X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
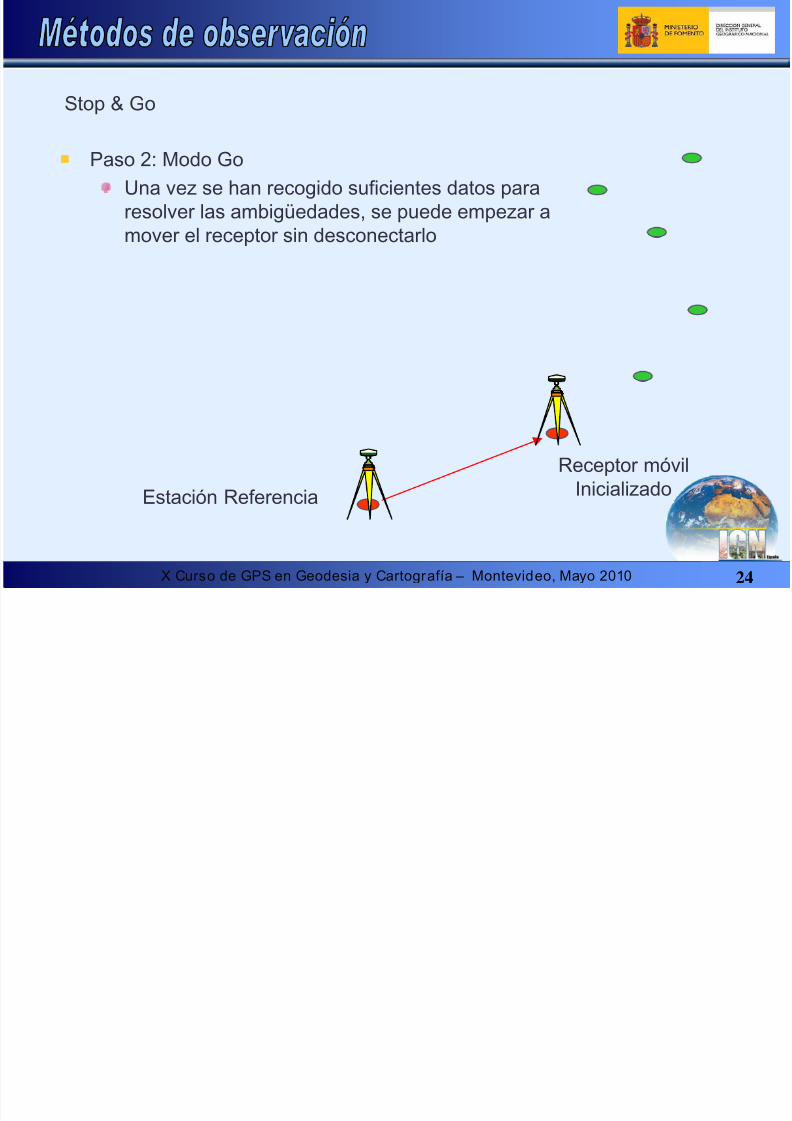
Stop & Go
Paso 2: Modo Go
Una vez se han recogido suficientes datos para
resolver las ambigüedades, se puede empezar amover el receptor sin desconectarlo
Receptor móvil Inicializado Estación Referencia

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 25/55
2525 25X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
1
2
3
4 5 Desarrollo: Modo Go
Resueltas las ambigüedades se comienza a visitar
los puntos a levantarSe tiene que mantener el seguimiento continuo de almenos 4 satélites
Cada punto requiere sólo una época
Si se pierde el seguimiento hay que volver areinicializar
Stop and Go
• Aplicaciones
– Levantamientos de Detalleen áreas abiertas
Estación Referencia
Receptor móvil
Inicialización

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 26/55
2626 26X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Antes de empezar hay que resolver la ambigüedad inicial:
- Inicialización Estática, en un punto cualquiera con una pequeñaobservación estática.
- Inicialización en un punto conocido, inicializador, de menor periodo detiempo.
-Cambio de antena (antenna swapping):
- Se sitúan dos receptores en dos estaciones cercanas.- Una estación es de coordenadas conocidas, puesto (estación de referencia).- La segunda se selecciona arbitrariamente.- Se observan datos comunes aproximadamente un minuto.- Después se intercambian las antenas, manteniendo la fijación de fase de lossatélites observados y nuevamente se recolectan datos durante un minuto.
La mayoría de los fabricantes incluyen estos tres posibles métodos deinicialización.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 27/55
2727 27X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Eficiente en áreas abiertas, donde no se espere pérdida de señal.
En caso de pérdida de señal, nueva inicialización, el receptor móviltiene que volver a la última marca coordenada de la medición.
Es esencial que en tal caso, el receptor avise de la pérdida de señal.
Este método ha perdido validez y uso por el RTK, con más versatilidaden el funcionamiento y rendimiento superior en topografía.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 28/55
2828 28X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
- Cinemático normal
Paso 1: Modo Stop
Inicialización estática del receptor móvil
InicializaciónBaselinea conocida, inicializador
Swap de antenas
5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 29/55
2929 29X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
2 3 : 1
0 : 2
2
2 3 : 1
0 : 2
4
2 3 : 1
0 : 2
6
2 3 : 1
0 : 2
7
2 3 : 1
0 : 2
8
2 3 : 1
0 : 3
0
2 3 : 1
0 : 1
2
2 3 : 1
0 : 1
4
2 3 : 1
0 : 1
6
2 3 : 1
0 : 1
8
2 3 : 1
0 : 2
0
2 3 : 1
0 : 1
4
2 3 : 1
0 : 1
6
2 3 : 1
0 : 1
8
2 3 : 1
0 : 2
0
2 3 : 1
0 : 2
2
2 3 : 1
0 : 2
4
2 3 : 1
0 : 2
6
2 3 : 1
0 : 2
7
2 3 : 1
0 : 2
8
2 3 : 1
0 : 3
0
2 3 : 1
0 : 1
2
2 3 : 1
0 : 1
4
2 3 : 1
0 : 1
6
2 3 : 1
0 : 1
8
2 3 : 1
0 : 2
0
2 3 : 1
0 : 1
2
2 3 : 1
0 : 1
4
2 3 : 1
0 : 1
6
2 3 : 1
0 : 1
8
2 3 : 1
0 : 2
0
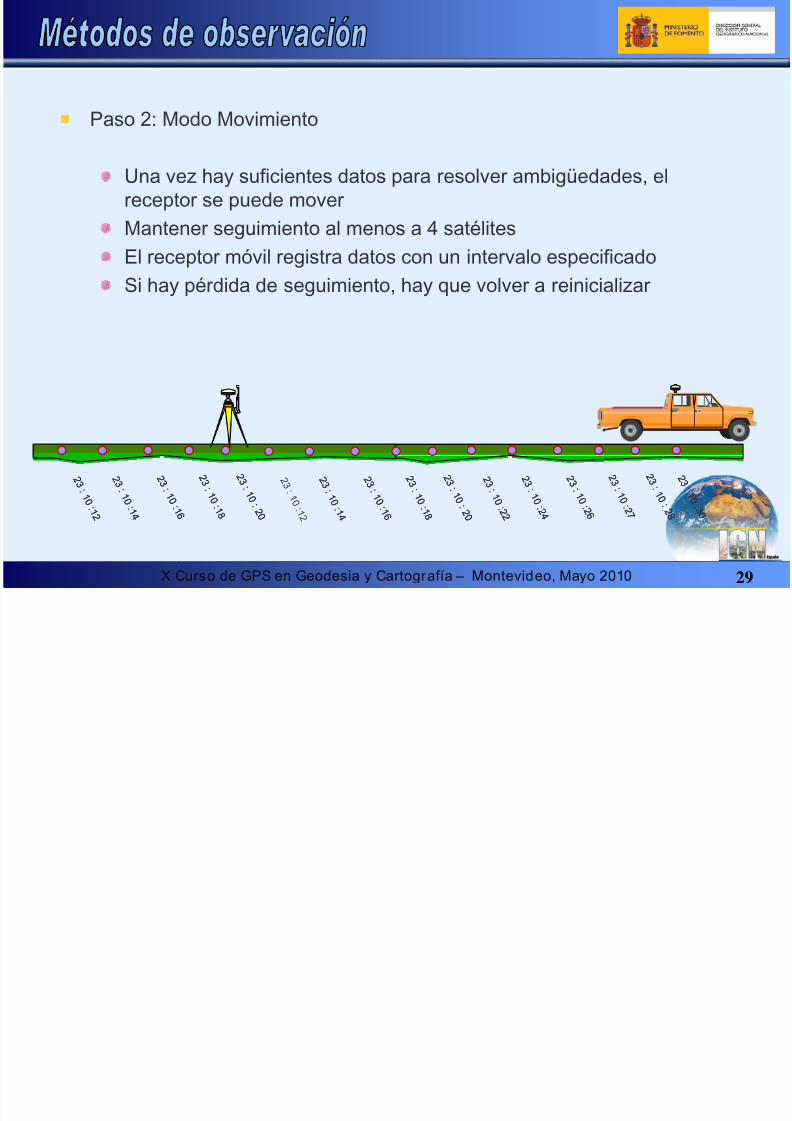
Paso 2: Modo Movimiento
Una vez hay suficientes datos para resolver ambigüedades, elreceptor se puede mover
Mantener seguimiento al menos a 4 satélites
El receptor móvil registra datos con un intervalo especificado
Si hay pérdida de seguimiento, hay que volver a reinicializar

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 30/55
3030 30X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Levantamiento continuo
Requiere planeamiento minucioso para evitar obstáculos a
los satélitesHay que mantener seguimiento continuo a 4 satélites
Apto para
áreas abiertas y despejadas de vegetación
trabajos no críticos
Necesita inicialización del equipo móvil
5-10 minutos parado para resolver posteriormenteambigüedades en postproceso

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 31/55
3131 31X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
- Cinemático en Tiempo Real (RTK).
Mayor eficacia, versatilidad, precisión y rendimiento para todo tipo detrabajos de topografía.
Es una forma de obtener los resultados una vez procesadas lasobservaciones en tiempo real.
El cálculo se realiza de forma inmediata a la recepción de las observacionespor la unidad de control, obteniendo las coordenadas en t real.
Transmisión de las diferencias de fase de un receptor a otro en t real através de radio-modem.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 32/55
3232 32X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Permite edición de datos de un levantamiento en campo, replanteo, y labores en lasque sea necesario el conocimiento de las coordenadas de los puntos en tiempo real.
Inconveniente: limitación de los radio-modem de emisión y transmisión de datos:licencias de frecuencias y potencias de señal permitidas. Un equipo de 0.5 W,(permitido por las autoridades), está limitado (7-8 Km con intervisibilidad).

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 33/55
3333 33X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
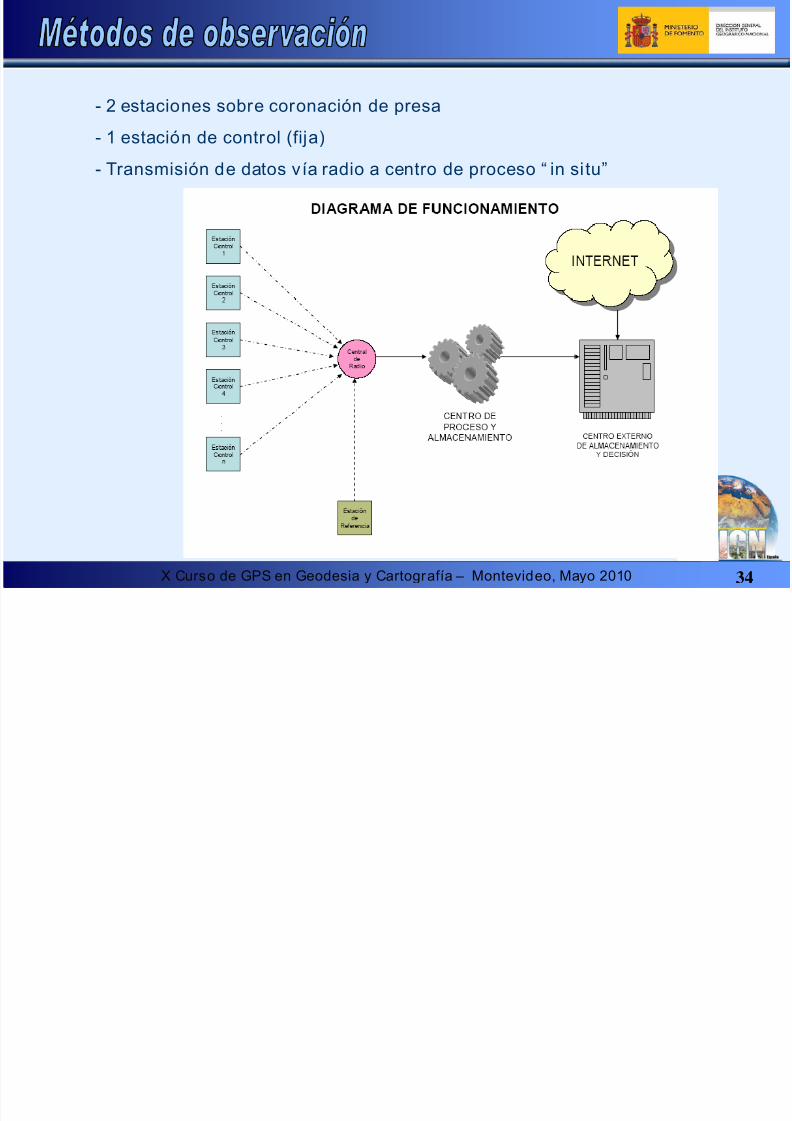
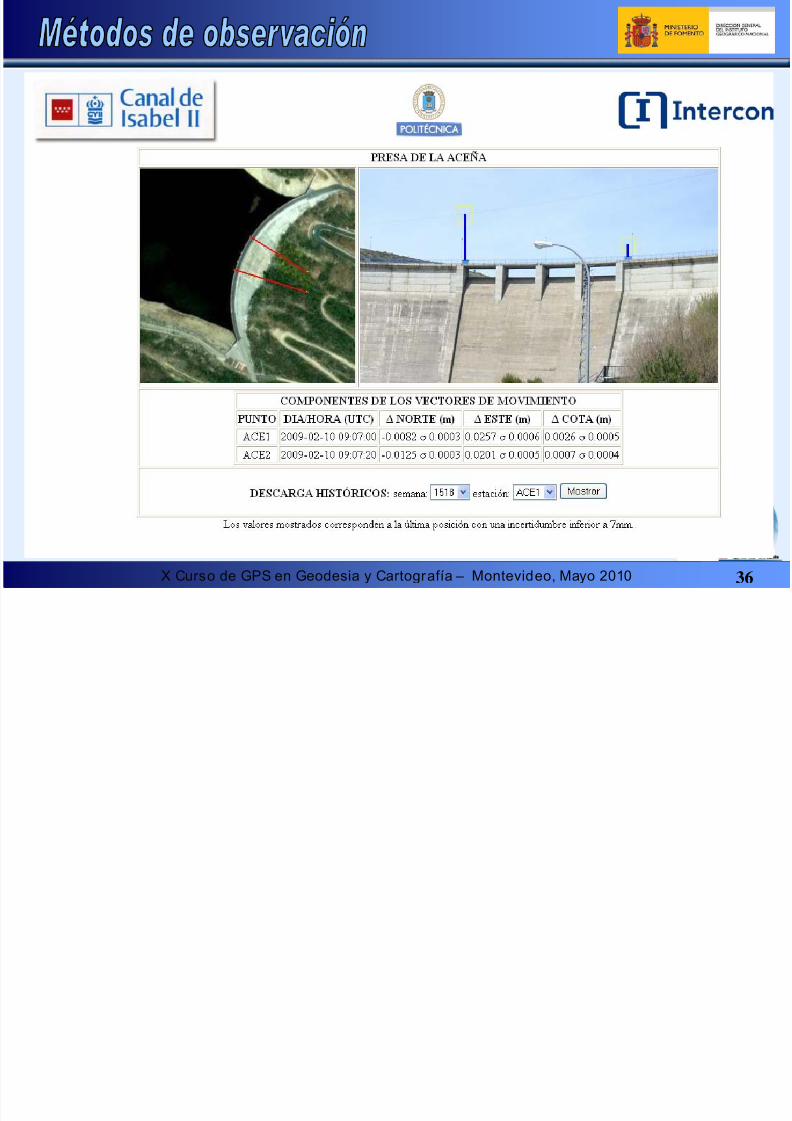
Ejemplo de RTK para control de obra civil: Monitorización continuade la presa de La Aceña
5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 34/55
3434 34X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
- 2 estaciones sobre coronación de presa- 1 estación de control (fija)
- Transmisión de datos vía radio a centro de proceso “in situ”

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 35/55
3535 35X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Software de control y sistema dealarmas en tiempo real
“Estabilización” durante unas
horas para tomar posición dereferencia
Filtro de Kalman para predecir
posiciones y suavizar la evolución
Componentes (N,E,h) respecto aposición de referencia
5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 36/55
3636 36X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 37/55
3737 37X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 38/55
3838 38X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Tiempos de observación
Longitud
Línea
Número de
Satélites
GDOP Tiempo
Observación
Precisión
20 - 50 Km.
50 - 100 Km.
> 100 Km.
2 - 3 hr.
min. 3 hr.
min. 4 hr.
5 mm + 1ppm
5 mm + 1ppm
5 mm + 1ppm
Estático (depende mucho del software de post-proceso)
> =
4
4
4
> =
> = 6
6
6
< =
< =
< =
• Estático-Rápido
Longitud
Línea
Número de
Satélites
GDOP Tiempo
Observación
Precisión
0 - 5 Km.
5 - 10 Km.
10 - 20 Km.
5 - 10 min.
10 - 15 min.
10 - 30 min.
5 - 10 mm + 1ppm
5 - 10 mm + 1ppm
5 - 10 mm + 1ppm > =
4
4
4
> =
> = 5
5
5
< =
< =
< =

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 39/55
3939 39X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
• Stop and Go
– Para fijar las ambigüedades se realiza con un estático rápido. Si es conpunto conocido, se inicializa con pocos segundos.
• Cinemático
– Para fijar las ambigüedades se realiza con un estático rápido. Ellevantamiento se realiza en movimiento.
Intervalos de toma de datos
Método
Estático
Estático-Rápido
Stop and Go
Cinemático, OTF
5 - 30 seg.
3 -5 seg.
1 - 5 seg.
1 seg. o más
Intervalos típicos
Depende del t de obs.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 40/55
4040 40X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
PrecisionesCARACTERÍSTICAS DE LOS MÉTODOS DE TRABAJO CON GPS
Mét odo Núm. mín.Satéls
Tiempo de observación
Precisión típica Otras característica
Estático 4 De minutos a horas 5 mm + 1 ppm Límite 15 Km para unafrecuencia. Sin límite con
dos
E s t á t i c o -
Rápido
4 5-20 minutos 1cm + 1 ppm
Cinemático 4 2 épocas 2 cm + 2 ppm L í m i t e 1 5 K m .Reinicialización si hay
pérdida de señal
Cinemático
en tiempo
real RTK
4 2 épocas 2 cm + 2 ppm Límite 10 Km. Enlace por
radio. Reinicialización si hay
pérdida de señalDiferencial
DGPS
2D: 3
3D: 4
1 posición/segundo Asistido de fase: < 1m
Sin fase: 1-4 m
Recepción de correcciones
diferenciales o postprocesoAutónomo 1D: 2
2D: 3
3D: 4
1 posición/segundo Con SA: 100 m
Sin SA: 4-10 m
Sólo se necesita un receptor

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 41/55
4141 41X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 42/55
4242 42X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Metodología y aplicaciónTIPO DE APLICACIÓN DEL GPS
Levantamientos de Control
Levantamientos Topográficos
Replanteos
Posicionamiento rápido de precisión
Levantamientos para SIG
Navegación
MÉTODO DE TRABAJOGPS Estático
GPS Estático-Rápido
GPS Cinemático
GPS Cinemático en tiempo realGPS Diferencial
GPS AutónomoAplicación de uso principal del procedimiento
Procedimiento auxiliar o de apoyo para la aplicación
5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 43/55
4343 43X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
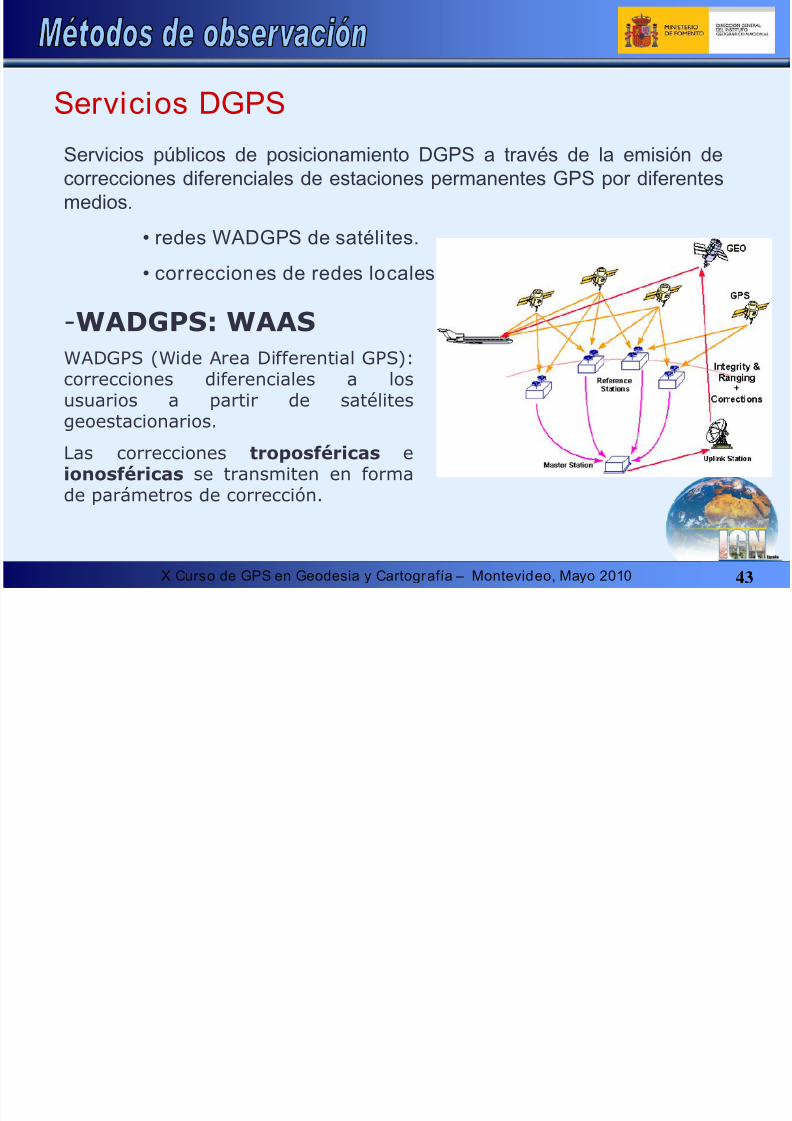
Servicios DGPSServicios públicos de posicionamiento DGPS a través de la emisión decorrecciones diferenciales de estaciones permanentes GPS por diferentesmedios.
• redes WADGPS de satélites.
• correcciones de redes locales.
-WADGPS: WAASWADGPS (Wide Area Differential GPS):correcciones diferenciales a losusuarios a partir de satélites
geoestacionarios.Las correcciones troposféricas eionosféricas se transmiten en formade parámetros de corrección.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 44/55
4444 44X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
EGNOS (European Geostationary Navigation Overlay Service)

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 45/55
4545 45X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
El sistema EGNOS proporciona las siguientes funciones, que constituyenlas aumentaciones requeridas para complementar las prestaciones de laconstelación GPS/GLONASS:
• Telemetría / GEO Ranging (R-GEO): Transmisión de señales GPS desdetres satélites geoestacionarios (INMARSAT III AOR-E, INMARSAT III IOR y elARTEMIS). Al aumentar el número de satélites de navegación, aumenta ladisponibilidad, continuidad y precisión.
• Integridad / GNSS Integrity Channel (GIC): Distribución de información deintegridad. Esto aumenta la integridad del servicio de seguridadGPS/GLONASS/EGNOS de navegación hasta el nivel requerido para laaviación civil (no precisión).
• Precisión / Wide Area Differential (WAD): Distribución de correccionesdiferenciales. Esto incrementa la exactitud del servicioGPS/GLONASS/EGNOS de navegación y las prestaciones en general hastaalcanzar el nivel exigido para aproximaciones de categoría I.
Sistemas similares en USA (WAAS).

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 46/55
4646 46X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
- Correcciones de redes locales (LAAS)Mensajes RTCM 2.x
RTCM: formato estandarizado desde 1985, de acuerdo a la RadioTechnical Commission for Maritime Services, Comité 104 para la
transmisión de correcciones diferenciales GPS.
64 tipos de mensajes disponibles, aunque la mayoría aún no definidos.Se definirán, por ej., para satélites geoestacionarios, GALILEO, etc.
- La versión 2.0 incluye mensajes para hacer posible lacorrección a las pseudodistancias y variación con el tiempo ala corrección de éstas.
- La versión 2.1 en adelante contiene además tipos para las
correcciones a las medidas de fase.
- Actualmente, versión 3.x, más compleja y más mensajes(rejilla de transformación, modelo de geoide...)

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 47/55
4747 47X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 48/55
4848 48X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Correcciones diferenciales GPS en el IGN
1. DGPS (de código) sobre radio analógica (RDS): proyecto RECORD.
RECORD (Red Española de CORrecciones Diferenciales): difusión de
correcciones DGPS a través de la subportadora no audible RDS (Radio DataSystem) de las emisoras RNE.
La corrección diferencial GPS de código se dispone en formato RTCM 2.1.
Compresión formato RASANT (Radio Aided Sat. Navigation Technique).
En este formato se envía a RNE y lo incorpora a la señal FM.
Un receptor FM/RDS/RASANT descomprime y proporciona las correcciones
originales RTCM integrables en la gran mayoría de receptores GPS.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 49/55
4949 49X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Las correcciones diferenciales en formato RTCM se generan y comprimen enel IGN, donde son enviadas a RNE.
En RNE se integran en el servidor RDS encargado de transmitir y mezclarlas distintas tramas RDS.
Desde RNE se inyectan en Hispasat y se difunden a los centros emisores.
Las distintas emisoras FM difunden las correcciones diferenciales que
reciben de Hispasat.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 50/55
5050 50X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
2. DGPS sobre Internet: proyecto EUREF-IP.
(http://igs.ifag.de/euref_realtime.htm)
Las aplicaciones DGPS sobre Internet, aunque requieren un flujo continuode datos, no necesitan un ancho de banda muy grande.
Proyecto EUREF-IP: transmisión de datos brutos GPS y correccionesdiferenciales de código y fase en formato RTCM.
La recepción de correcciones diferenciales se realiza a través de cualquierequipo con acceso a Internet: ordenador, PDA con GPRS, etc.
El ancho de banda requerido para aplicaciones de código se cifra en unos50 bytes/segundo mientras que en fase (RTK) unos 500 bytes/segundo.
Posicionamiento preciso y navegación RTCM con mensajes 1-2 para DGPS
y 18/19 o 20/21 para RTK.
NTRIP es la tecnología para transferir datos GNSS (por ejemplocorrecciones RTCM) mediante redes de Internet o de telefonía móvil.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 51/55
5151 51X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Proyectos de redes GNSS de las CCAA
Instalación de redes de estaciones permanentes GNSS CCAA.
Propósitos: RTK (Internet y radio-modem), servidor RINEX, DGPS, etc.
Correcciones con solución de red: mensaje NMEA a servidor yemisión de correcciones para el usuario de VRS baselínea 0.
Correcciones de estaciones individuales: el usuario selecciona lamás cercana a su posición y se conecta con el CASTER.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 52/55
5252 52X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 53/55
5353 53X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
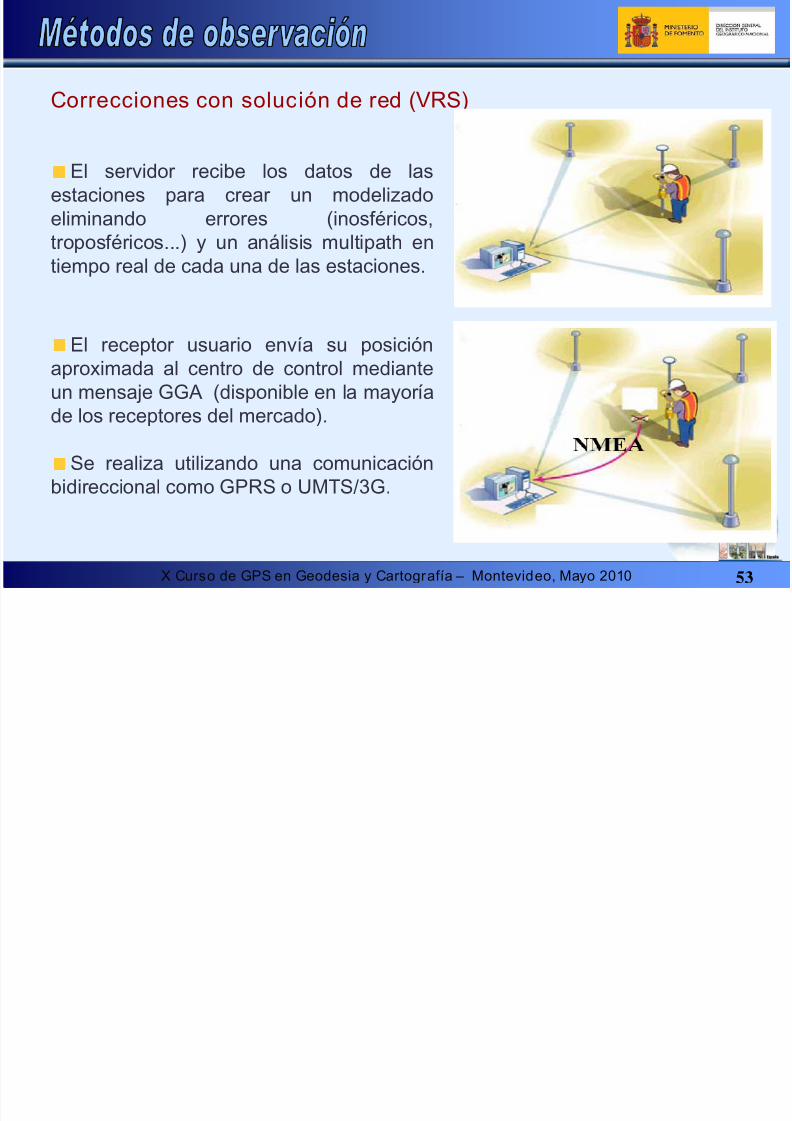
Correcciones con solución de red (VRS)
El servidor recibe los datos de lasestaciones para crear un modelizado
eliminando errores (inosféricos,troposféricos...) y un análisis multipath entiempo real de cada una de las estaciones.
El receptor usuario envía su posiciónaproximada al centro de control medianteun mensaje GGA (disponible en la mayoría
de los receptores del mercado).
Se realiza utilizando una comunicaciónbidireccional como GPRS o UMTS/3G.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 54/55
5454 54X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
El centro de control acepta la posicióny responde generando correccionesRTCM al receptor usuario a través de un
puerto lógico (Internet).
El usuario calcula una posición DGPS(precisión de 1 m) que servirá para
actualizar su posición y enviarla de nuevoal centro de control, lo que asegura quelas distorsiones sean prácticamenteiguales.

5/11/2018 Metodos de observacion-1 - slidepdf.com
http://slidepdf.com/reader/full/metodos-de-observacion-1 55/55
5555 55X Curso de GPS en Geodesia y Cartografía – Montevideo, Mayo 2010
Creación de datos de estacionesde referencia “virtuales” (VRS).
Es posible alcanzar el rendimientoen mediciones RTK dentro de la red.
Precisión horizontal de 1-2 cm.
cuando las distancias entre lasestaciones de ref. son de 50 a 70 km.
Esta distancia depende de las
propias características de la zona,(en zonas con alta actividadionosférica necesitaría una mayordensidad de estaciones la red).
Recommended