Metodos Matematicos
O plano complexo: aplicacoes a cinematica e dinamica
A C Tort1
1Departmento de Fısica TeoricaInstituto Fısica – Universidade Federal do Rio de Janeiro
20 de agosto de 2012
Curvas, posicao, velocidade e aceleracao no plano
complexo
Curvas, posicao, velocidade e aceleracao no plano
complexo
Suponha que φ(t) e ψ(t) sejam duas funcoes reais da variavel realt que supomos contınuas para t ∈ [t1, t2]. As equacoes x = φ(t) ey = ψ(t) ou:
Curvas, posicao, velocidade e aceleracao no plano
complexo
Suponha que φ(t) e ψ(t) sejam duas funcoes reais da variavel realt que supomos contınuas para t ∈ [t1, t2]. As equacoes x = φ(t) ey = ψ(t) ou:
z = x + iy = φ(t) + iψ(t),
Curvas, posicao, velocidade e aceleracao no plano
complexo
Suponha que φ(t) e ψ(t) sejam duas funcoes reais da variavel realt que supomos contınuas para t ∈ [t1, t2]. As equacoes x = φ(t) ey = ψ(t) ou:
z = x + iy = φ(t) + iψ(t),
ou ainda, em notacao informal:
Curvas, posicao, velocidade e aceleracao no plano
complexo
Suponha que φ(t) e ψ(t) sejam duas funcoes reais da variavel realt que supomos contınuas para t ∈ [t1, t2]. As equacoes x = φ(t) ey = ψ(t) ou:
z = x + iy = φ(t) + iψ(t),
ou ainda, em notacao informal:
z(t) = x(t) + iy(t),
Curvas, posicao, velocidade e aceleracao no plano
complexo
Suponha que φ(t) e ψ(t) sejam duas funcoes reais da variavel realt que supomos contınuas para t ∈ [t1, t2]. As equacoes x = φ(t) ey = ψ(t) ou:
z = x + iy = φ(t) + iψ(t),
ou ainda, em notacao informal:
z(t) = x(t) + iy(t),
definem uma curva contınua ou arco no plano complexo que uneos pontos P1 = z(t1) e P2 = z(t2).
Se z(t1) = z(t2), para t1 6= t2, isto e: P1 = P2, a curva e fechada.
Se z(t1) = z(t2), para t1 6= t2, isto e: P1 = P2, a curva e fechada.Uma curva que nao intercepta a si mesma em nenhum ponto edita ser uma curva simples.
Se z(t1) = z(t2), para t1 6= t2, isto e: P1 = P2, a curva e fechada.Uma curva que nao intercepta a si mesma em nenhum ponto edita ser uma curva simples.Se x = φ(t) e y = ψ(t) tiverem derivadas contınuas no intervalofechado [t1, t2], a curva sera curva ou arco suave.
Se z(t1) = z(t2), para t1 6= t2, isto e: P1 = P2, a curva e fechada.Uma curva que nao intercepta a si mesma em nenhum ponto edita ser uma curva simples.Se x = φ(t) e y = ψ(t) tiverem derivadas contınuas no intervalofechado [t1, t2], a curva sera curva ou arco suave.Uma curva composta por um numero finito de arcos suaves echamada contınua por partes ou secionalmente contınua.
b
b
P1
P2
Posicao, velocidade no plano complexo
Posicao, velocidade no plano complexoA posicao instantanea de um ponto no instante t no planocomplexo e dada por:

Posicao, velocidade no plano complexoA posicao instantanea de um ponto no instante t no planocomplexo e dada por:
z(t) = x(t) + iy(t) = r(t)eiθ(t),
Posicao, velocidade no plano complexoA posicao instantanea de um ponto no instante t no planocomplexo e dada por:
z(t) = x(t) + iy(t) = r(t)eiθ(t),
A velocidade instantanea e definida por:
Posicao, velocidade no plano complexoA posicao instantanea de um ponto no instante t no planocomplexo e dada por:
z(t) = x(t) + iy(t) = r(t)eiθ(t),
A velocidade instantanea e definida por:
v(t) = lim∆z
∆t∆t→0
=dz(t)
dt.
Posicao, velocidade no plano complexoA posicao instantanea de um ponto no instante t no planocomplexo e dada por:
z(t) = x(t) + iy(t) = r(t)eiθ(t),
A velocidade instantanea e definida por:
v(t) = lim∆z
∆t∆t→0
=dz(t)
dt.
Na representacao cartesiana:
v(t) =dz(t)
dt=
dx(t)
dt+ i
dy(t)
dt,
Posicao, velocidade no plano complexoA posicao instantanea de um ponto no instante t no planocomplexo e dada por:
z(t) = x(t) + iy(t) = r(t)eiθ(t),
A velocidade instantanea e definida por:
v(t) = lim∆z
∆t∆t→0
=dz(t)
dt.
Na representacao cartesiana:
v(t) =dz(t)
dt=
dx(t)
dt+ i
dy(t)
dt,
e na representacao polar:
Posicao, velocidade no plano complexoA posicao instantanea de um ponto no instante t no planocomplexo e dada por:
z(t) = x(t) + iy(t) = r(t)eiθ(t),
A velocidade instantanea e definida por:
v(t) = lim∆z
∆t∆t→0
=dz(t)
dt.
Na representacao cartesiana:
v(t) =dz(t)
dt=
dx(t)
dt+ i
dy(t)
dt,
e na representacao polar:
v(t) =dr(t)
dte iθ(t) + ir
dθ(t)
dte iθ(t).
Aceleracao
Aceleracao
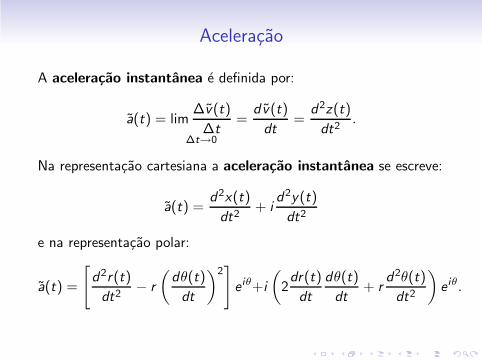
A aceleracao instantanea e definida por:
Aceleracao
A aceleracao instantanea e definida por:
a(t) = lim∆v(t)
∆t∆t→0
=dv(t)
dt=
d2z(t)
dt2.
Aceleracao
A aceleracao instantanea e definida por:
a(t) = lim∆v(t)
∆t∆t→0
=dv(t)
dt=
d2z(t)
dt2.
Na representacao cartesiana a aceleracao instantanea se escreve:
Aceleracao
A aceleracao instantanea e definida por:
a(t) = lim∆v(t)
∆t∆t→0
=dv(t)
dt=
d2z(t)
dt2.
Na representacao cartesiana a aceleracao instantanea se escreve:
a(t) =d2x(t)
dt2+ i
d2y(t)
dt2
Aceleracao
A aceleracao instantanea e definida por:
a(t) = lim∆v(t)
∆t∆t→0
=dv(t)
dt=
d2z(t)
dt2.
Na representacao cartesiana a aceleracao instantanea se escreve:
a(t) =d2x(t)
dt2+ i
d2y(t)
dt2
e na representacao polar:
Aceleracao
A aceleracao instantanea e definida por:
a(t) = lim∆v(t)
∆t∆t→0
=dv(t)
dt=
d2z(t)
dt2.
Na representacao cartesiana a aceleracao instantanea se escreve:
a(t) =d2x(t)
dt2+ i
d2y(t)
dt2
e na representacao polar:
a(t) =
[
d2r(t)
dt2− r
(
dθ(t)
dt
)2]
e iθ+i
(
2dr(t)
dt
dθ(t)
dt+ r
d2θ(t)
dt2
)
e iθ.
Exemplo: movimento circular uniforme
Exemplo: movimento circular uniforme
Considere um ponto material que descreve um movimento circularde raio R percorrendo arcos de cırculo iguais em intervalos detempo iguais (MCU). As coordenadas cartesianas do ponto sao:
Exemplo: movimento circular uniforme
Considere um ponto material que descreve um movimento circularde raio R percorrendo arcos de cırculo iguais em intervalos detempo iguais (MCU). As coordenadas cartesianas do ponto sao:
x(t) = R cos ωt, e y(t) = R senωt,
onde ω e a magnitude da velocidade angular. Multiplicando acoordenada y por i e somando com a coordenada x :
Exemplo: movimento circular uniforme
Considere um ponto material que descreve um movimento circularde raio R percorrendo arcos de cırculo iguais em intervalos detempo iguais (MCU). As coordenadas cartesianas do ponto sao:
x(t) = R cos ωt, e y(t) = R senωt,
onde ω e a magnitude da velocidade angular. Multiplicando acoordenada y por i e somando com a coordenada x :
x(t) + iy(t) = R (cos ωt + i senωt) ,
Exemplo: movimento circular uniforme
Considere um ponto material que descreve um movimento circularde raio R percorrendo arcos de cırculo iguais em intervalos detempo iguais (MCU). As coordenadas cartesianas do ponto sao:
x(t) = R cos ωt, e y(t) = R senωt,
onde ω e a magnitude da velocidade angular. Multiplicando acoordenada y por i e somando com a coordenada x :
x(t) + iy(t) = R (cos ωt + i senωt) ,
ou, fazendo uso da formula de Euler:
Exemplo: movimento circular uniforme
Considere um ponto material que descreve um movimento circularde raio R percorrendo arcos de cırculo iguais em intervalos detempo iguais (MCU). As coordenadas cartesianas do ponto sao:
x(t) = R cos ωt, e y(t) = R senωt,
onde ω e a magnitude da velocidade angular. Multiplicando acoordenada y por i e somando com a coordenada x :
x(t) + iy(t) = R (cos ωt + i senωt) ,
ou, fazendo uso da formula de Euler:
z(t) = R eiωt .
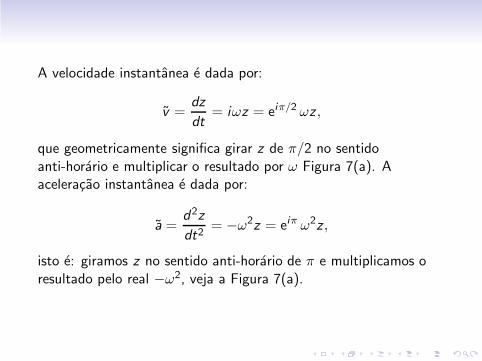
A velocidade instantanea e dada por:

A velocidade instantanea e dada por:
v =dz
dt= iωz = eiπ/2 ωz ,

A velocidade instantanea e dada por:
v =dz
dt= iωz = eiπ/2 ωz ,
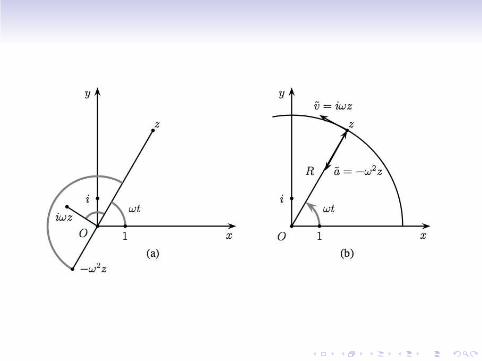
que geometricamente significa girar z de π/2 no sentidoanti-horario e multiplicar o resultado por ω Figura 7(a). Aaceleracao instantanea e dada por:
A velocidade instantanea e dada por:
v =dz
dt= iωz = eiπ/2 ωz ,
que geometricamente significa girar z de π/2 no sentidoanti-horario e multiplicar o resultado por ω Figura 7(a). Aaceleracao instantanea e dada por:
a =d2z
dt2= −ω2z = eiπ ω2z ,
isto e: giramos z no sentido anti-horario de π e multiplicamos oresultado pelo real −ω2, veja a Figura 7(a).
Dinamica bidimensional no plano complexo
Dinamica bidimensional no plano complexo
Dinamica newtoniana no plano complexo significa resolver aequacao newtoniana de movimento:
Dinamica bidimensional no plano complexo
Dinamica newtoniana no plano complexo significa resolver aequacao newtoniana de movimento:
F = ma
Dinamica bidimensional no plano complexo
Dinamica newtoniana no plano complexo significa resolver aequacao newtoniana de movimento:
F = ma
com as condicoes iniciais:
Dinamica bidimensional no plano complexo
Dinamica newtoniana no plano complexo significa resolver aequacao newtoniana de movimento:
F = ma
com as condicoes iniciais:
z(0) = z0 = x0 + iy0, edz(0)
dt= v0 = vx0 + ivy0,

(i) 0 oscilador harmonico simples (OHS) e suas variantes, opendulo simples e o pendulo conico;
(i) 0 oscilador harmonico simples (OHS) e suas variantes, opendulo simples e o pendulo conico;
(ii) o oscilador amortecido com atrito linear na velocidade;
(i) 0 oscilador harmonico simples (OHS) e suas variantes, opendulo simples e o pendulo conico;
(ii) o oscilador amortecido com atrito linear na velocidade;
(iii) o oscilador forcado;
(i) 0 oscilador harmonico simples (OHS) e suas variantes, opendulo simples e o pendulo conico;
(ii) o oscilador amortecido com atrito linear na velocidade;
(iii) o oscilador forcado;
(iv) o referencial girante; o pendulo de Foucault;
(i) 0 oscilador harmonico simples (OHS) e suas variantes, opendulo simples e o pendulo conico;
(ii) o oscilador amortecido com atrito linear na velocidade;
(iii) o oscilador forcado;
(iv) o referencial girante; o pendulo de Foucault;
(v) partıcula carregada em um campo magnetico uniforme;
(i) 0 oscilador harmonico simples (OHS) e suas variantes, opendulo simples e o pendulo conico;
(ii) o oscilador amortecido com atrito linear na velocidade;
(iii) o oscilador forcado;
(iv) o referencial girante; o pendulo de Foucault;
(v) partıcula carregada em um campo magnetico uniforme;
(vi) o problema da forca central;
(i) 0 oscilador harmonico simples (OHS) e suas variantes, opendulo simples e o pendulo conico;
(ii) o oscilador amortecido com atrito linear na velocidade;
(iii) o oscilador forcado;
(iv) o referencial girante; o pendulo de Foucault;
(v) partıcula carregada em um campo magnetico uniforme;
(vi) o problema da forca central;
Discutiremos alguns desses exemplos nas proximas aulas.
Recommended



![Geometría Analítica - docencia.dim.uchile.cl · Sistema de coordenadas cartesianas Semana03[4/26] Sistema de coordenadas cartesianas Un poco más de nomenclatura: La recta horizontal](https://img.pdfslide.tips/doc/110x75/5c17024109d3f28f0a8d5d81/geometria-analitica-sistema-de-coordenadas-cartesianas-semana03426-sistema.jpg)












