1
LAUREA QUINQUENNALE IN ARCHITETTURA INGEGNERIA
a.a. 2009-2010
CORSO DI
TECNICA DELLE COSTRUZIONI
Prof. Roberto Capozucca
APPUNTI DI CALCOLO ELASTICO DELLE
PIASTRE SOTTILI
Generalità
E’ tradizione consolidata dei corsi di Tecnica delle Costruzione delle Facoltà di
Ingegneria riprendere l’analisi dei continui elastici bidimensionali – piastre e lastre –
o quelli di a sviluppo spaziale – gusci, per le numerose applicazioni che si
riscontrano nella pratica tecnica delle strutture in cemento armato, in acciaio o nelle
più tradizionali strutture in muratura di edifici monumentali.
In quanto segue l’attenzione sarà rivolta alla teoria delle piastre sottili in
grado di mantenere un regime flessionale prevalente a quello membranale e costituite
di materiale isotropo. Il problema dell’equilibrio elastico della piastra sottile viene
ricondotto alla soluzione di un’equazione differenziale alle derivate parziali,
associata a particolari condizioni al contorno, in cui è la superficie elastica è
incognita. Soluzioni ancora efficaci per gli ingegneri strutturisti sono praticabili
mediante uno sviluppo in serie di funzioni che, per la rapida convergenza delle serie
adottate, permettono di determinare i valori degli spostamenti e sollecitazioni in
modo semplice ed utile per il controllo di soluzioni spesso onerose ottenibili con
codici di calcolo agli elementi finiti usualmente utilizzabili.
Si discutono le soluzioni con lo sviluppo in serie semplici ed in serie doppie.
Inoltre, come esempio applicativo, si controlla il comportamento di un modello
sperimentale di piastra quadrata in conglomerato cementizio rinforzato appoggiata su
tutti i lati sottoposta ad un carico distribuito su un’area quadrata limitata.

2
2 Proprietà dei materiali e legge dell’elasticità
Nello studio del continuo si considera che i materiali posseggano alcune
particolari proprietà fisiche. In particolare, un materiale si definisce perfettamente
elastico se a seguito della rimozione del carico riassume completamente la forma
originaria. Matematicamente la proprietà elastica è descritta dalla legge di Hooke.
Un corpo che mostra lo stesso comportamento elastico in tutte le direzioni è
chiamato isotropo.
Nel caso in cui il corpo possieda differenti proprietà elastiche nelle due
direzioni ortogonali è detto ortotropo. L’ortotropia è solo un caso particolare di
anisotropia. Nell’analisi delle strutture impiegate nell’ingegneria si distinguono due
tipologie di elementi ortotropi: l’ortotropia naturale, conseguente alle proprietà
fisiche del materiale che differiscono lungo le varie direzioni, l’ortotropia
strutturale, che comprende gli elementi rinforzati per motivi di resistenza e stabilità,
come le piastre nervate. Le proprietà elastiche variabili in questi casi possono essere
espresse dalle differenti rigidezze torsionali e flessionali nelle due direzioni. In
campo elastico questo secondo gruppo può essere trattato con la stessa teoria
impiegata per le piastre ortotrope con qualche modifica.
Per la soluzione del problema della distribuzione delle tensioni e delle
deformazioni in un corpo isotropo, è necessario utilizzare equazioni che tengano
conto delle stesse proprietà nelle varie direzioni.
La relazione generale di elasticità è esprimibile nel modo seguente
klijklij C (1)
Secondo la notazione di Voight:
333331
232221
131211
;;
;;;
;;;
zzyzx
yzxyx
xzxyx
(2)
Esplicitando una delle componenti di tensione (ad esempio x ), si ricava:
31113123112322112221112113111312111211111111 CCCCCCCx
331133321132 CC

3
In generale, ogni componente di tensione si scrive attraverso 9 costanti elastiche;
essendo 9 il numero delle componenti di tensione ( ij per i,j=1,3) si ottengono 81
costanti elastiche. Poiché risulta jiij e jiij , le componenti di tensione
indipendenti sono 6 e quindi le costanti della (3.1) diventano 36. L'equazione (3.1),
per le condizioni di elasticità di Green, richiede che sia verificata anche la seguente
condizione:
))(())(( ijklklij CC (3)
Quindi le 36 costanti elastiche si riducono a 21. Se ci sono simmetrie del materiale,
le 21 costanti presenti nei legami possono essere ancora ridotte.
MATERIALE ANISOTROPO
L'equazione (3.3) può essere scritta in forma matriciale esplicitando le 21 costanti:
zx
yz
xy
z
y
x
=
666564636261
565554535251
464544434241
363534333231
262524232221
161514131211
cccccc
cccccc
cccccc
cccccc
cccccc
cccccc
zx
yz
xy
z
y
x
(4)
essendo le costanti ijc (i,j=1,6) legate alle costanti ijklC (i,j,k,l=1,3) dell'equazione
(1). Per esempio :
111111 Cc ;
112315 Cc ;
121244 Cc ;
….
MATERIALE ORTOTROPO
Un materiale ortotropo possiede una simmetria elastica rispetto a 3 assi
perpendicolari. Considerando le coordinate dei tre assi x,y,z perpendicolari a tre
piani di simmetria, si possono determinare alcune relazioni tra le costanti
dell'equazione (3.4). Si hanno quindi solo 9 costanti elastiche:
4
zx
yz
xy
z
y
x
=
66
55
44
33
2322
131211
00000
00000
00000
00000
0000
000
c
c
c
c
cc
ccc
zx
yz
xy
z
y
x
(5)
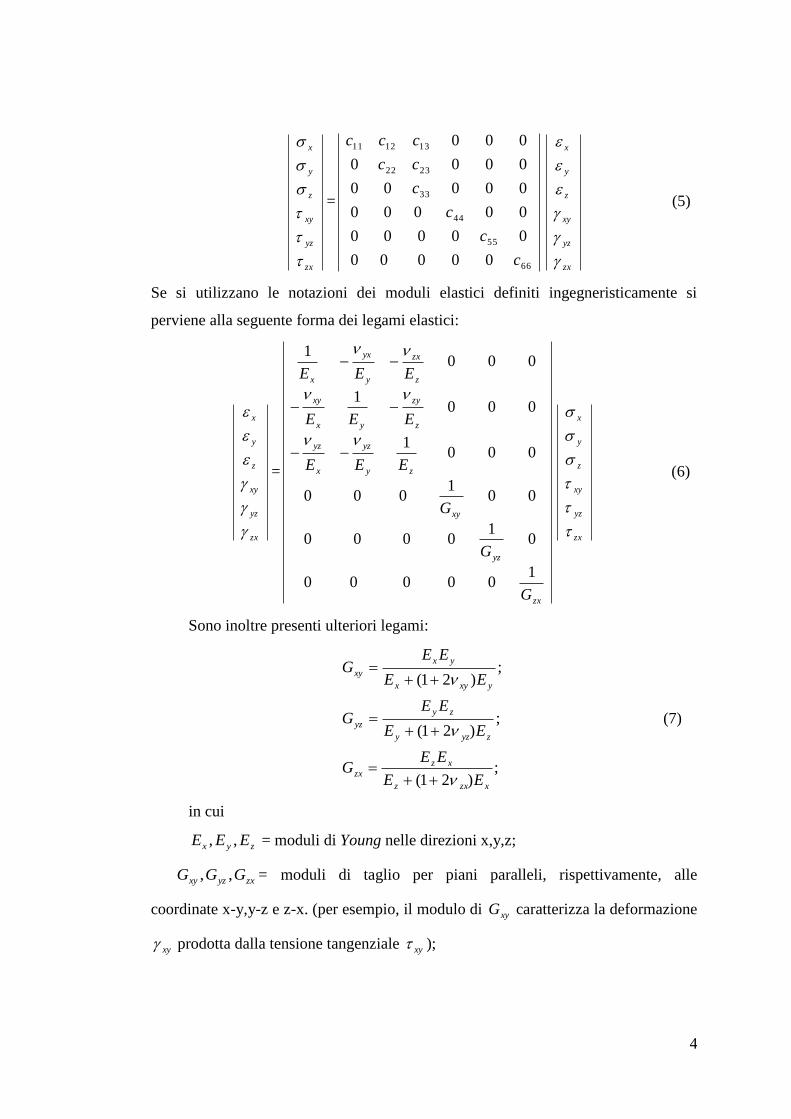
Se si utilizzano le notazioni dei moduli elastici definiti ingegneristicamente si
perviene alla seguente forma dei legami elastici:
zx
yz
xy
z
y
x
=
zx
yz
xy
zy
yz
x
yz
z
zy
yx
xy
z
zx
y
yx
x
G
G
G
EEE
EEE
EEE
100000
01
0000
001
000
0001
0001
0001
zx
yz
xy
z
y
x
(6)
Sono inoltre presenti ulteriori legami:
;)21(
;)21(
;)21(
xzxz
xzzx
zyzy
zy
yz
yxyx
yx
xy
EE
EEG
EE
EEG
EE
EEG
(7)
in cui
zyx EEE ,, = moduli di Young nelle direzioni x,y,z;
zxyzxy GGG ,, = moduli di taglio per piani paralleli, rispettivamente, alle
coordinate x-y,y-z e z-x. (per esempio, il modulo di xyG caratterizza la deformazione
xy prodotta dalla tensione tangenziale xy );
5
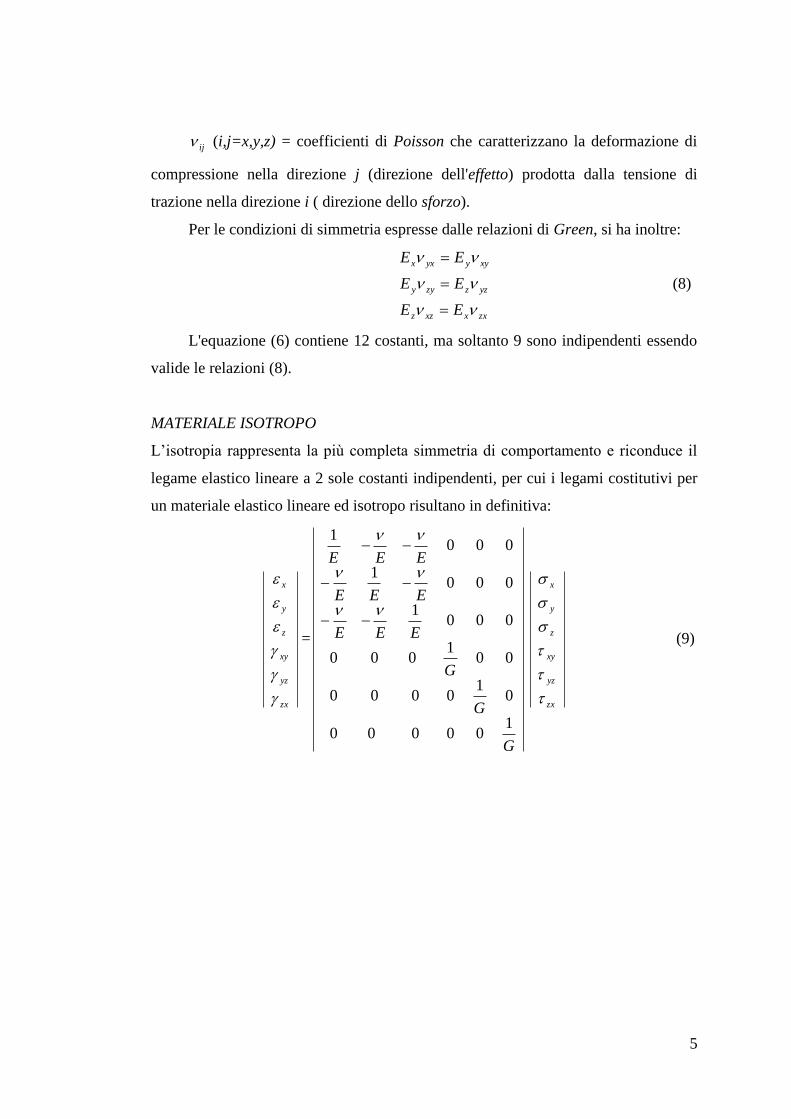
ij (i,j=x,y,z) = coefficienti di Poisson che caratterizzano la deformazione di
compressione nella direzione j (direzione dell'effetto) prodotta dalla tensione di
trazione nella direzione i ( direzione dello sforzo).
Per le condizioni di simmetria espresse dalle relazioni di Green, si ha inoltre:
zxxxzz
yzzzyy
xyyyxx
EE
EE
EE
(8)
L'equazione (6) contiene 12 costanti, ma soltanto 9 sono indipendenti essendo
valide le relazioni (8).
MATERIALE ISOTROPO
L’isotropia rappresenta la più completa simmetria di comportamento e riconduce il
legame elastico lineare a 2 sole costanti indipendenti, per cui i legami costitutivi per
un materiale elastico lineare ed isotropo risultano in definitiva:
zx
yz
xy
z
y
x
=
G
G
G
EEE
EEE
EEE
100000
01
0000
001
000
0001
0001
0001
zx
yz
xy
z
y
x
(9)
6
3 Legami costitutivi per piastre isotrope
Nel caso delle piastre isotrope, in cui il continuo elastico è costituito da un
solido bidimensionale con riferimento xoy, le relazioni elastiche sono espresse nel
modo seguente:
G
EE
EE
xy
xy
yxy
yxx
(10)
essendo G il modulo di taglio esprimibile con
)1(2
E
G (11)
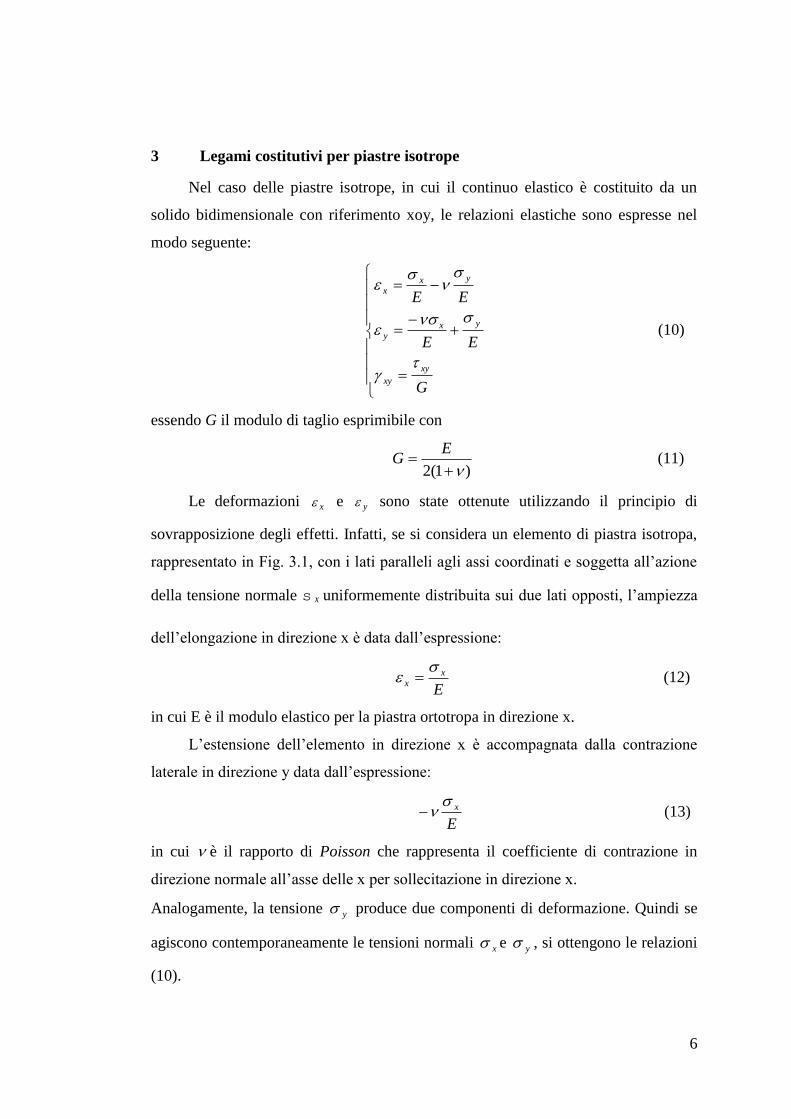
Le deformazioni x e y sono state ottenute utilizzando il principio di
sovrapposizione degli effetti. Infatti, se si considera un elemento di piastra isotropa,
rappresentato in Fig. 3.1, con i lati paralleli agli assi coordinati e soggetta all’azione
della tensione normale s x uniformemente distribuita sui due lati opposti, l’ampiezza
dell’elongazione in direzione x è data dall’espressione:
E
xx
(12)
in cui E è il modulo elastico per la piastra ortotropa in direzione x.
L’estensione dell’elemento in direzione x è accompagnata dalla contrazione
laterale in direzione y data dall’espressione:
E
x (13)
in cui è il rapporto di Poisson che rappresenta il coefficiente di contrazione in
direzione normale all’asse delle x per sollecitazione in direzione x.
Analogamente, la tensione y produce due componenti di deformazione. Quindi se
agiscono contemporaneamente le tensioni normali x e y , si ottengono le relazioni
(10).
7
Fig. 1 - Effetto Poisson.
Le tensioni invece sono espresse dalle seguenti relazioni:
xyxy
xyy
yxx
G
E
E
)(1
)(1
2
2
(14)
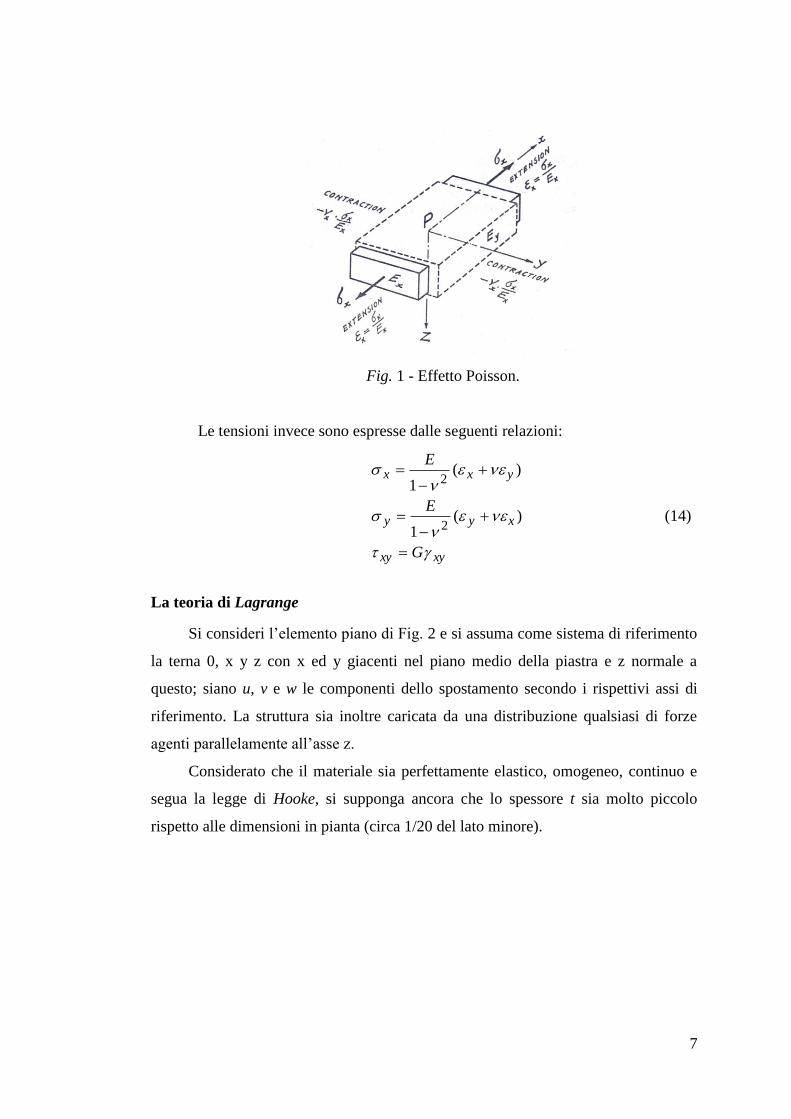
La teoria di Lagrange
Si consideri l’elemento piano di Fig. 2 e si assuma come sistema di riferimento
la terna 0, x y z con x ed y giacenti nel piano medio della piastra e z normale a
questo; siano u, v e w le componenti dello spostamento secondo i rispettivi assi di
riferimento. La struttura sia inoltre caricata da una distribuzione qualsiasi di forze
agenti parallelamente all’asse z.
Considerato che il materiale sia perfettamente elastico, omogeneo, continuo e
segua la legge di Hooke, si supponga ancora che lo spessore t sia molto piccolo
rispetto alle dimensioni in pianta (circa 1/20 del lato minore).
8
Fig. 2 – Schema della piastra.
Quest’ultima condizione permette di formulare il problema elastico della
piastra nella forma sviluppata da Lagrange.
Tale teoria si basa sulle seguenti ipotesi fondamentali:
a) i segmenti rettilinei e normali al piano medio della piastra restano tali nella
configurazione deformata. L’ipotesi, detta di Kirchoff, è analoga a quella della
conservazione della sezione piana per la trave ed è attendibile solo se lo spessore
t è piccolo rispetto alle altre dimensioni, perché in questo caso è trascurabile la
deformazione dovuta al taglio rispetto alle deformazioni provocate dai momenti
flettenti;
b) le componenti u e v dello spostamento dei punti appartenenti al piano medio della
piastra sono nulle, ciò significa che le componenti di deformazione sx e sy si
suppongono nulle. L’ipotesi è giustificata solo se lo spessore t, pur trascurabile
rispetto alle dimensioni in pianta, non è estremamente piccolo rispetto a queste:
la piastra deve essere sottile ma non troppo, altrimenti gli spostamenti w sono
paragonabili a t e viene chiamata in gioco anche la resistenza membranale della
piastra, con conseguente deformazione del piano medio;
c) La componente w dello spostamento in direzione normale al piano medio è
indipendente dalla quota z ed è quindi funzione solo di x ed y.
Secondo le ipotesi elencate, la configurazione deformata della piastra è pertanto
definita quando è nota la componente dello spostamento w(x,y) del piano medio della
piastra.
9
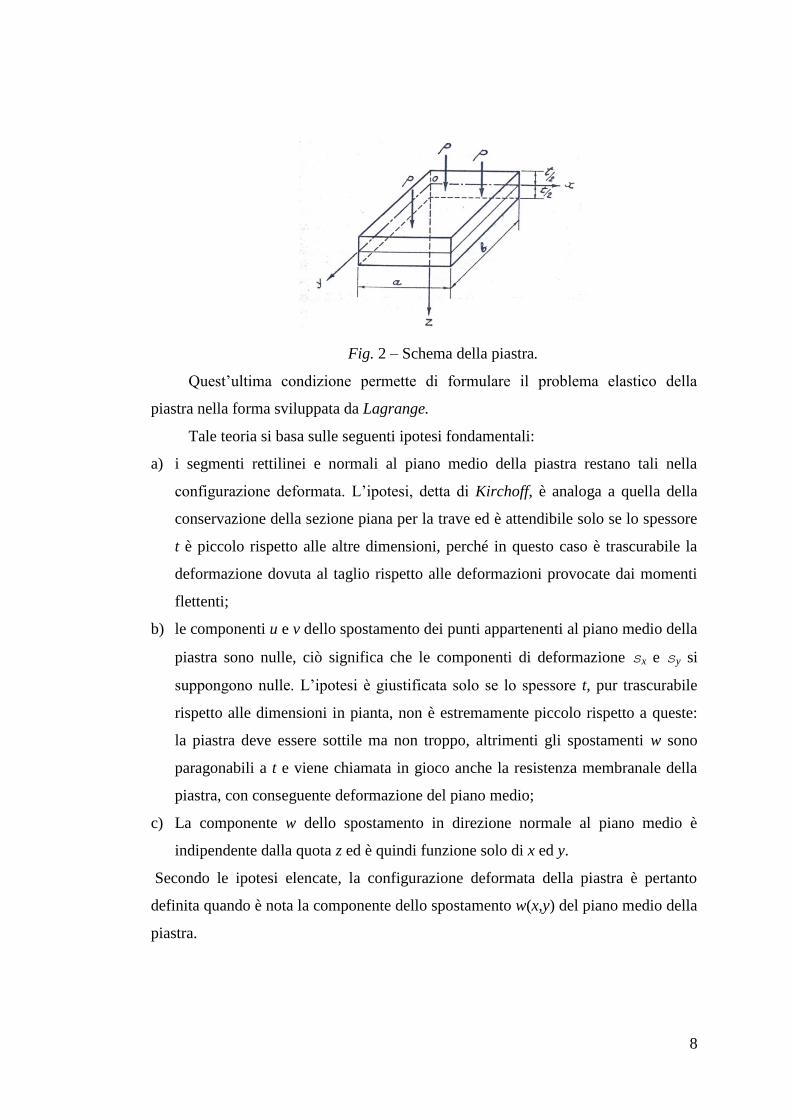
Fig. 3 - Deformazioni dell'elemento di piastra.
Infatti facendo riferimento alla Fig. 3, le componenti dello spostamento u e v
della fibra disposta alla quota z rispetto al piano medio della piastra, sono
rappresentate dalle relazioni seguenti:
x
wzu
y
wzv
(15)
E’ così possibile esprimere le componenti di deformazione del generico
elementino della piastra in funzione dello spostamento w(x,y):
0
2
2
2
2
z
w
y
wz
y
v
x
wz
x
u
z
y
x
0
0
22
y
w
z
v
x
w
z
u
yx
wz
x
v
y
u
yz
xz
xy
(16)
Per passare dalle componenti di deformazione (3.16) alle componenti di
tensione, in virtù dell’ipotesi fatta sullo spessore della piastra, è lecito porre:
0z (17)
Infatti, indicando con p il carico sulla faccia superiore della piastra, il valore
della sz dovrà variare fra i due estremi –p per z = -t/2 e 0 per z = t/2; se la piastra è
abbastanza sottile il valore di p e quindi della massima sz è trascurabile rispetto ai
valori di sx , sy e txy dovuti alle caratteristiche flettenti e torcenti; la posizione (17)
10
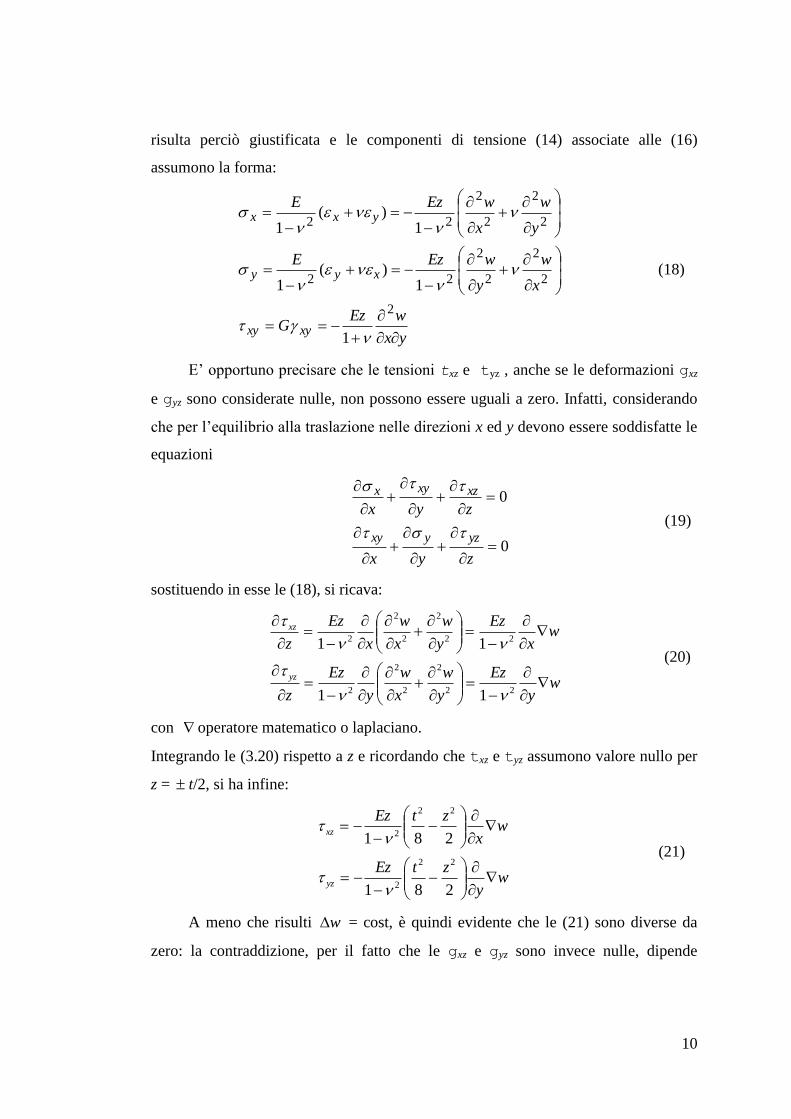
risulta perciò giustificata e le componenti di tensione (14) associate alle (16)
assumono la forma:
yx
wEzG
x
w
y
wEzE
y
w
x
wEzE
xyxy
xyy
yxx
2
2
2
2
2
22
2
2
2
2
22
1
1)(
1
1)(
1
(18)
E’ opportuno precisare che le tensioni txz e tyz , anche se le deformazioni gxz
e gyz sono considerate nulle, non possono essere uguali a zero. Infatti, considerando
che per l’equilibrio alla traslazione nelle direzioni x ed y devono essere soddisfatte le
equazioni
0
0
zyx
zyx
yzyxy
xzxyx
(19)
sostituendo in esse le (18), si ricava:
wy
Ez
y
w
x
w
y
Ez
z
wx
Ez
y
w
x
w
x
Ez
z
yz
xz
22
2
2
2
2
22
2
2
2
2
11
11
(20)
con operatore matematico o laplaciano.
Integrando le (3.20) rispetto a z e ricordando che txz e tyz assumono valore nullo per
z = t/2, si ha infine:
wy
ztEz
wx
ztEz
yz
xz
281
281
22
2
22
2
(21)
A meno che risulti w = cost, è quindi evidente che le (21) sono diverse da
zero: la contraddizione, per il fatto che le gxz e gyz sono invece nulle, dipende
11
dall’ipotesi di conservazione dell’elemento normale, che non consente di porre in
relazione queste tensioni con le corrispondenti componenti di deformazione.
In conclusione le tensioni (21) derivano da necessità di equilibrio, ma sono incapaci
di produrre alcuna deformazione: ciò significa che la teoria di Lagrange fornisce
soluzioni equilibrate ma non perfettamente congruenti.
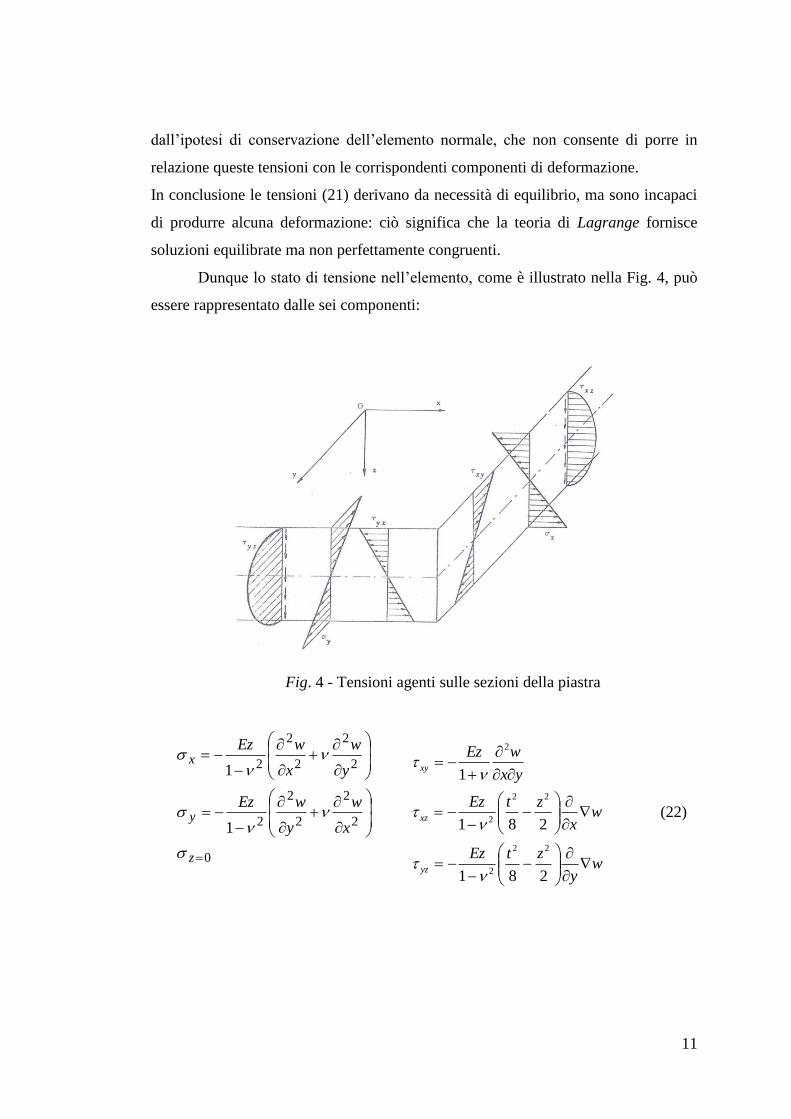
Dunque lo stato di tensione nell’elemento, come è illustrato nella Fig. 4, può
essere rappresentato dalle sei componenti:
Fig. 4 - Tensioni agenti sulle sezioni della piastra
0
2
2
2
2
2
2
2
2
2
2
1
1
z
y
x
x
w
y
wEz
y
w
x
wEz
wy
ztEz
wx
ztEz
yx
wEz
yz
xz
xy
281
281
1
22
2
22
2
2
(22)
12
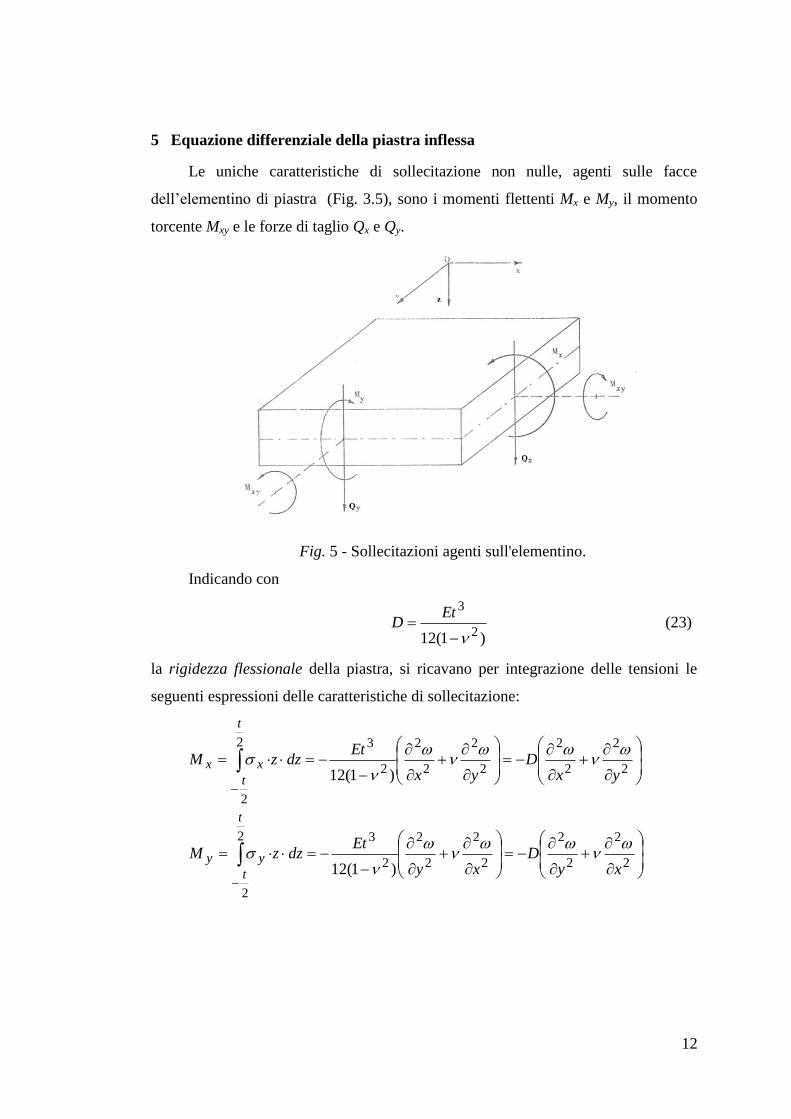
5 Equazione differenziale della piastra inflessa
Le uniche caratteristiche di sollecitazione non nulle, agenti sulle facce
dell’elementino di piastra (Fig. 3.5), sono i momenti flettenti Mx e My, il momento
torcente Mxy e le forze di taglio Qx e Qy.
Fig. 5 - Sollecitazioni agenti sull'elementino.
Indicando con
)1(12 2
3
EtD (23)
la rigidezza flessionale della piastra, si ricavano per integrazione delle tensioni le
seguenti espressioni delle caratteristiche di sollecitazione:
2
2
2
2
2
2
2
2
2
32
2
2
2
2
2
2
2
2
2
2
32
2
)1(12
)1(12
xyD
xy
EtdzzM
yxD
yx
EtdzzM
t
t
yy
t
t
xx

13
yxD
yx
EtdzzM
t
t
yxxy
2232
2
)1()1(12
(24)
wy
Dwy
EtdzzQ
wx
Dwx
EtdzzQ
t
t
yzy
t
t
xzx
)1(12
)1(12
2
32
2
2
32
2
Si osserva che le ultime due delle (24) si sarebbero potute ricavare direttamente
dalle prime tre, considerando l’equilibrio globale dell’elementino di piastra (Fig. 6).
Infatti scrivendo le condizioni di equilibrio alla rotazione intorno ai lati BC ed AB, si
ottiene:
y
M
x
MQ
y
M
x
MQ
yxy
y
xyxx
(25)
e sostituendo in queste le prime tre delle (24) si ricavano le ultime relazioni delle
(24). Invece per la condizione di equilibrio alla traslazione verticale dell’elementino
di Fig. 3.6 si rileva
0
p
y
Q
x
Q yx (26)
14
Si individua facilmente che le (25) e le (26) sono equivalenti alle relazioni che
intercorrono nelle travi fra momento flettente e forza di taglio e tra forza di taglio e
carico:
Fig. 6 - Sollecitazioni agenti su un elemento di piastra.
Qdx
dM 0 p
dx
dQ (27)
Sostituendo le (25) nella (26) è inoltre possibile unificare le relazioni nell’equazione
py
M
yx
M
x
M yxyx
2
22
2
2
2 (28)
perfettamente analoga al caso delle travi, in cui si ha
pdx
Md
2
2
(29)
Per ottenere l’equazione fondamentale in w(x,y), che governa il problema
dell’equilibrio elastico delle piastre sottili, è sufficiente sostituire le ultime due delle
(24) nella (26), oppure le prime tre delle (24) nella (28). Si ottiene così l’equazione
15
differenziale alle derivate parziali nell’incognita w(x,y) nota come equazione di
Lagrange:
),(24
4
22
4
4
4
yxpy
w
yx
w
x
wD
(30)
ovvero
),(2
2
2
2
2
2
2
2
yxpy
w
x
w
yxD
(31)
che in forma simbolica si può esprimere nel modo seguente.
),(2 yxpwD (32)
E’ immediato riscontrare che la (32) risulta duale dell’equazione della linea
elastica delle travi inflesse:
pdx
wdEI
4
4
(33)
Se la w dell’eq. (30) è funzione della sola x si ha
pdx
wdD
4
4
(34)
che differisce dalla (33). Tale differenza è dovuta essenzialmente all’impedita
contrazione trasversale della piastra, che risulta sollecitata, a differenza della trave,
non solo da tensioni sx, ma anche da tensioni sy.
6 Tensioni nelle piastre isotrope
Noto lo spostamento w(x,y) dall’integrazione dell’equazione fondamentale di
Lagrange (30), mediante le relazioni (24) è immediato ricavare le caratteristiche
della sollecitazione. Se si considerano l’espressione della tensione sx nella (18)
2
2
2
2
21 y
w
x
wEzx
(35)
e quella del momento Mx dell’equazione (24) nella seguente forma:
2
2
2
2
23 1
12
y
w
x
wEz
t
M x
(36)
16
dal confronto delle due equazioni è possibile risalire alla tensione x ; in maniera
analoga, si determinano le altre componenti di tensione:
zI
Mz
t
M
zI
Mz
t
M
zI
Mz
t
M
xyxy
xy
yy
xxx
3
3
3
12
12
12
2828
12
2828
12
2222
3
2222
3
zt
I
Qzt
t
Q
zt
I
Qzt
t
Q
yy
yz
xxxz
(37)
dove I è il momento d’inerzia della piastra per unità di lunghezza.
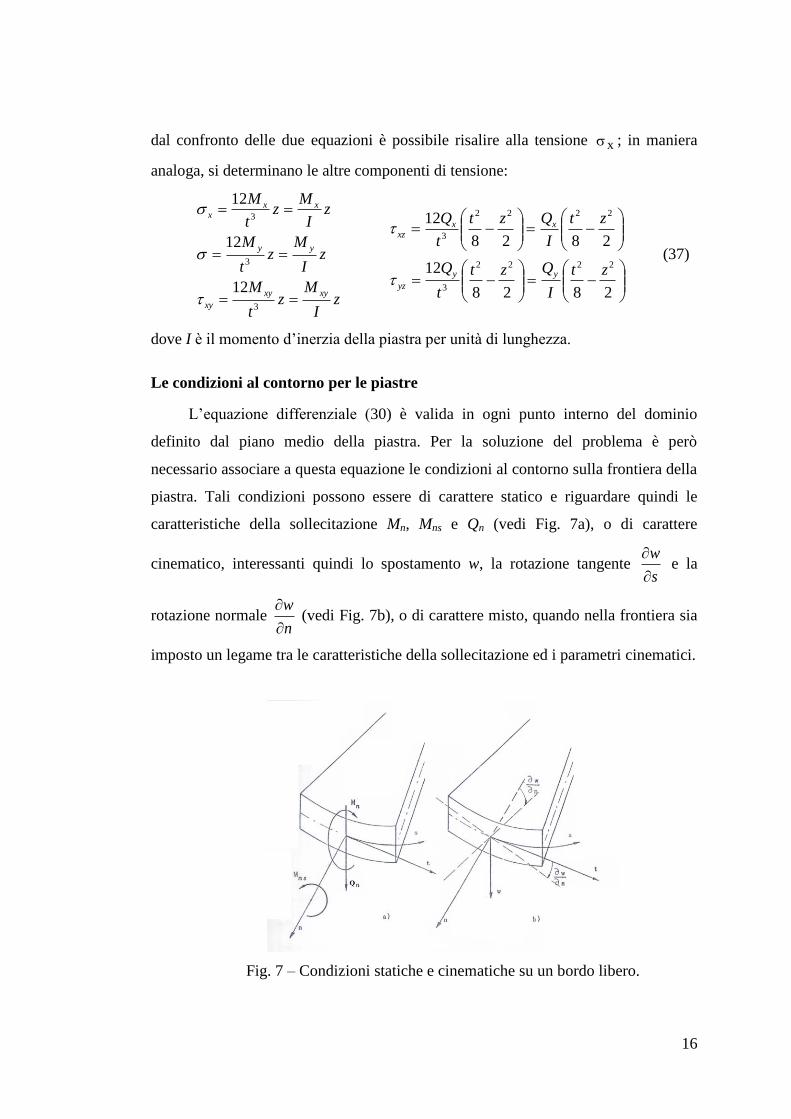
Le condizioni al contorno per le piastre
L’equazione differenziale (30) è valida in ogni punto interno del dominio
definito dal piano medio della piastra. Per la soluzione del problema è però
necessario associare a questa equazione le condizioni al contorno sulla frontiera della
piastra. Tali condizioni possono essere di carattere statico e riguardare quindi le
caratteristiche della sollecitazione Mn, Mns e Qn (vedi Fig. 7a), o di carattere
cinematico, interessanti quindi lo spostamento w, la rotazione tangente s
w
e la
rotazione normale n
w
(vedi Fig. 7b), o di carattere misto, quando nella frontiera sia
imposto un legame tra le caratteristiche della sollecitazione ed i parametri cinematici.
Fig. 7 – Condizioni statiche e cinematiche su un bordo libero.
17
Due è il numero massimo di condizioni cinematiche che si possono imporre
indipendentemente sul contorno: lo spostamento w e la rotazione normale n
w
; la
rotazione tangente s
w
infatti è nota quando su un tratto del contorno sia assegnato,
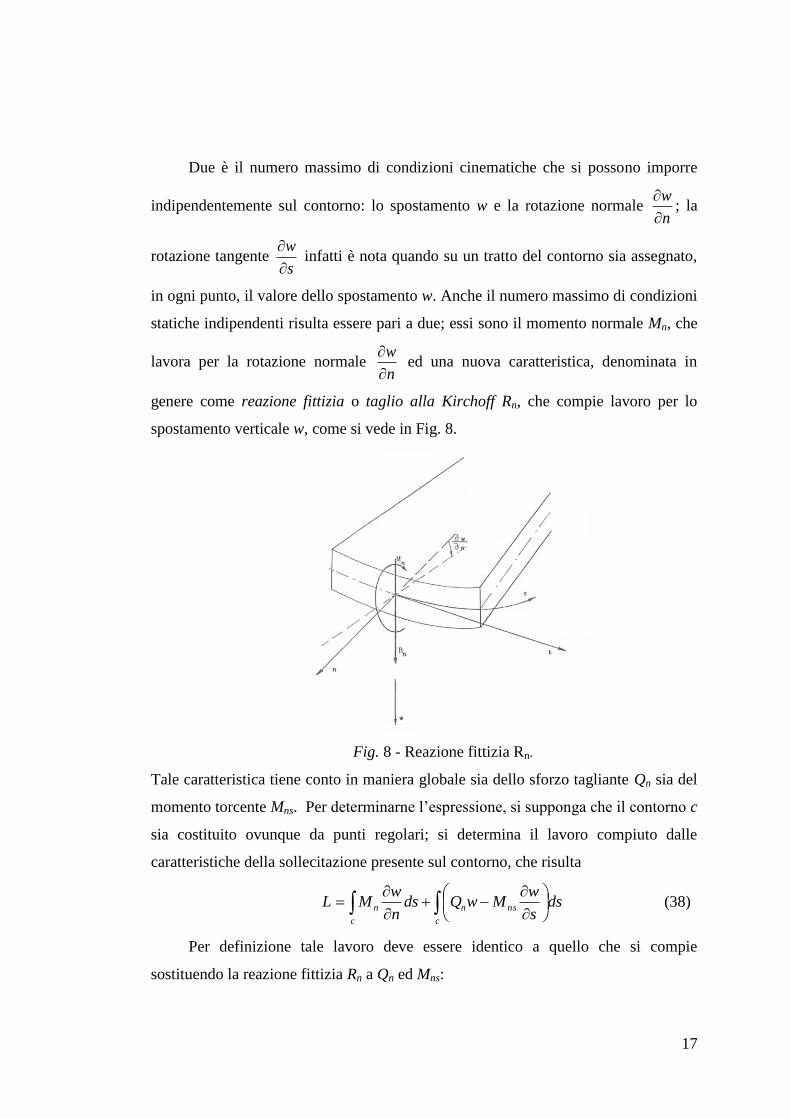
in ogni punto, il valore dello spostamento w. Anche il numero massimo di condizioni
statiche indipendenti risulta essere pari a due; essi sono il momento normale Mn, che
lavora per la rotazione normale n
w
ed una nuova caratteristica, denominata in
genere come reazione fittizia o taglio alla Kirchoff Rn, che compie lavoro per lo
spostamento verticale w, come si vede in Fig. 8.
Fig. 8 - Reazione fittizia Rn.
Tale caratteristica tiene conto in maniera globale sia dello sforzo tagliante Qn sia del
momento torcente Mns. Per determinarne l’espressione, si supponga che il contorno c
sia costituito ovunque da punti regolari; si determina il lavoro compiuto dalle
caratteristiche della sollecitazione presente sul contorno, che risulta
c c
nsnn dss
wMwQds
n
wML (38)
Per definizione tale lavoro deve essere identico a quello che si compie
sostituendo la reazione fittizia Rn a Qn ed Mns:

18
c c
nn wdsRdsn
wML (39)
Deve quindi aversi
c
n
c
nsn wdsRdss
wMwQ (40)
Integrando per parti su tutto il contorno la quantità
c
ns dss
wM (41)
si ottiene
c
n
c
nsn wdsRwds
s
MwQ (42)
e quindi si ha
s
MQR ns
nn
(43)
Se invece il contorno c contiene un punto angoloso, la funzione Mns risulterà
discontinua in questo punto, assumendo i due valori Mns’ ed Mns’’. Pertanto, alla
distribuzione di tagli Qn e momenti torcenti Mns andrà sostituita, nel punto angoloso,
non solo una distribuzione continua di reazioni fittizie Rn, ma anche una forza
concentrata S.
Rimanendo valida la (38), la (39) va riscritta nella forma
p
c c
nn SwwdsRdsn
wML
(44)
e quindi si deve avere
p
c
n
c
nsn SwwdsRdss
wMwQ
(45)
Integrando per parti la quantità
c
ns dss
wM (46)
la (45) diventa
19
p
c
npnsns
c
nsn SwwdsRwMMwds
s
MwQ
)( ''' (47)
Per qualsiasi tipo di contorno è dunque valida l’espressione (43) per la
reazione fittizia Rn, tenendo presente inoltre che in ogni punto angoloso agisce una
forza concentrata
'''nsns MMS (48)
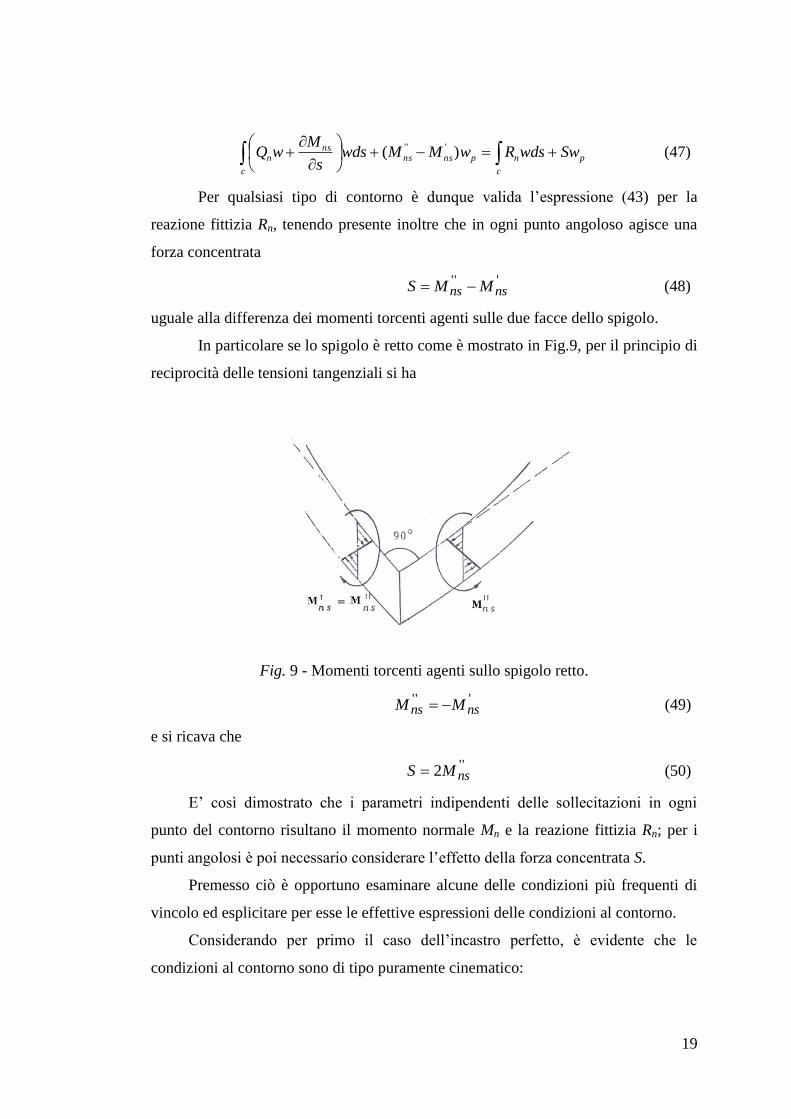
uguale alla differenza dei momenti torcenti agenti sulle due facce dello spigolo.
In particolare se lo spigolo è retto come è mostrato in Fig.9, per il principio di
reciprocità delle tensioni tangenziali si ha
Fig. 9 - Momenti torcenti agenti sullo spigolo retto.
'''nsns MM (49)
e si ricava che
''2 nsMS (50)
E’ così dimostrato che i parametri indipendenti delle sollecitazioni in ogni
punto del contorno risultano il momento normale Mn e la reazione fittizia Rn; per i
punti angolosi è poi necessario considerare l’effetto della forza concentrata S.
Premesso ciò è opportuno esaminare alcune delle condizioni più frequenti di
vincolo ed esplicitare per esse le effettive espressioni delle condizioni al contorno.
Considerando per primo il caso dell’incastro perfetto, è evidente che le
condizioni al contorno sono di tipo puramente cinematico:
20
w = 0 0
n
w (51)
Nel caso dell’appoggio, esse sono di tipo misto e si presentano nella forma
w = 0 Mn = 0 (3.52)
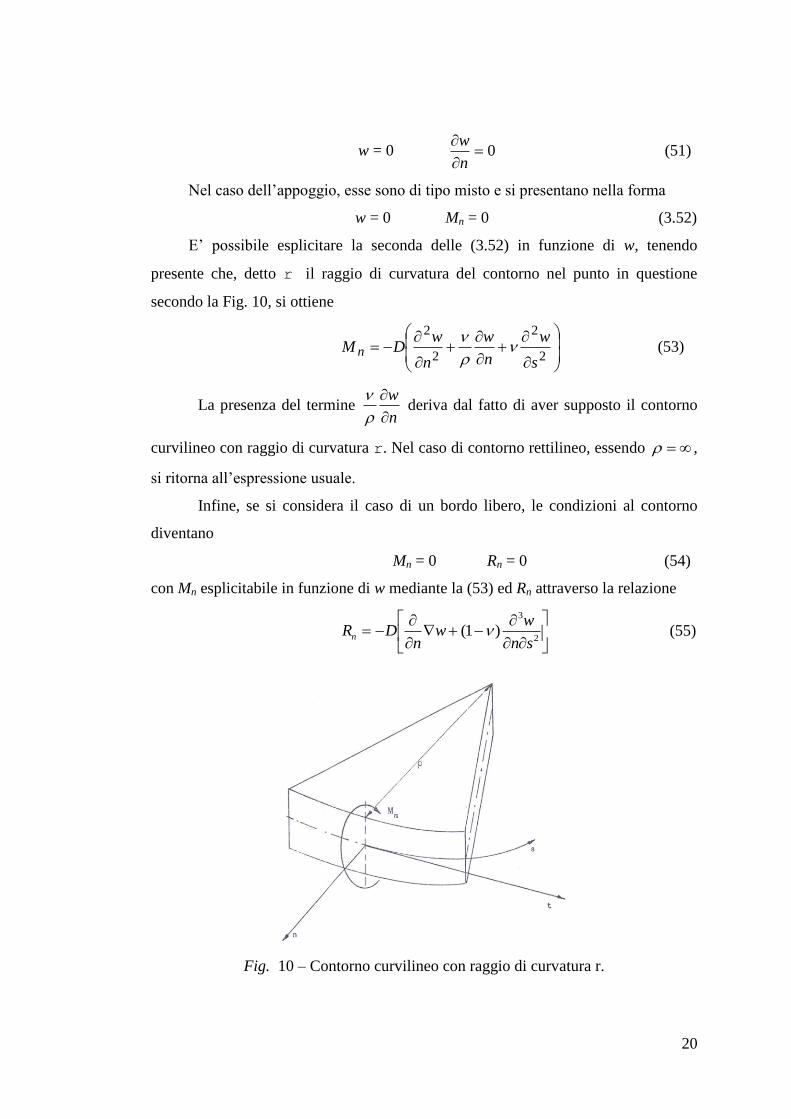
E’ possibile esplicitare la seconda delle (3.52) in funzione di w, tenendo
presente che, detto r il raggio di curvatura del contorno nel punto in questione
secondo la Fig. 10, si ottiene
2
2
2
2
s
w
n
w
n
wDM n
(53)
La presenza del termine n
w
deriva dal fatto di aver supposto il contorno
curvilineo con raggio di curvatura r. Nel caso di contorno rettilineo, essendo ,
si ritorna all’espressione usuale.
Infine, se si considera il caso di un bordo libero, le condizioni al contorno
diventano
Mn = 0 Rn = 0 (54)
con Mn esplicitabile in funzione di w mediante la (53) ed Rn attraverso la relazione
2
3
)1(sn
ww
nDRn (55)
Fig. 10 – Contorno curvilineo con raggio di curvatura r.
21
dove si è posto
2
2
2
2 1
s
w
n
w
n
w
(56)
* * *
Si è osservato come il problema dell’equilibrio elastico della piastra sottile è
ricondotto alla soluzione dell’equazione differenziale alle derivate parziali, associate
alle condizioni al contorno. Di essa difficilmente si possono dare soluzioni in termini
finiti; la superficie elastica w viene invece determinata mediante: soluzioni agli
elementi finiti con l’utilizzo di codici di calcolo (SAP, STRAUS, etc); soluzioni alle
differenze finite; sviluppi in serie di funzioni, i cui coefficienti sono le nuove
incognite del problema. Questa ultima procedura matematica, è basata sull’utilizzo di
serie semplici e serie doppie per piastre rettangolari. Il primo deriva da un preciso
procedimento matematico, il secondo scaturisce direttamente dall’osservazione di un
fenomeno fisico, quale le libere oscillazioni della piastra.
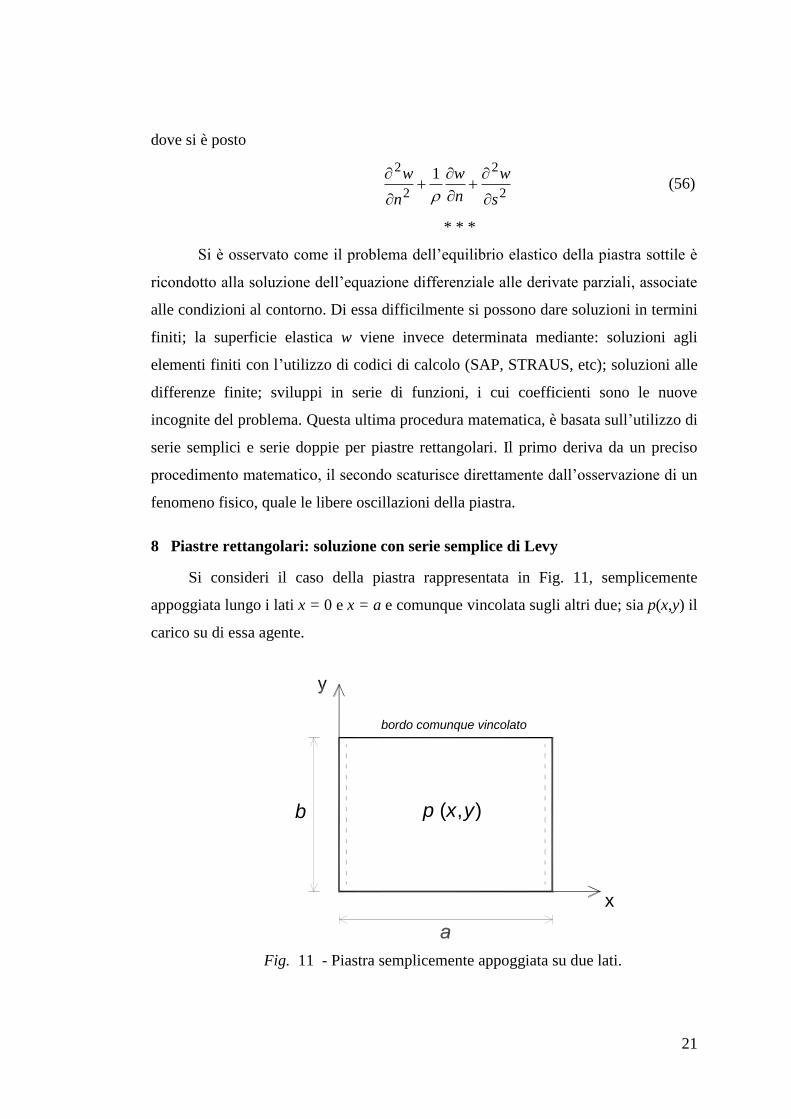
8 Piastre rettangolari: soluzione con serie semplice di Levy
Si consideri il caso della piastra rappresentata in Fig. 11, semplicemente
appoggiata lungo i lati x = 0 e x = a e comunque vincolata sugli altri due; sia p(x,y) il
carico su di essa agente.
b
x
p (x,y)
bordo comunque vincolato
Fig. 11 - Piastra semplicemente appoggiata su due lati.
22
La soluzione dell’equazione differenziale delle piastre (equazione di Lagrange)
si ottiene dalla somma di due soluzioni:
po www (57)
dove ow rappresenta la soluzione generale dell’equazione differenziale
dell’omogenea associata e pw è una soluzione particolare dell’equazione non
omogenea. Una soluzione dell’equazione omogenea può essere data in serie
semplice. Questa soluzione, proposta per primo da Levy, può essere rappresentata
nella forma generale:
)()(),( xfyYyxw mmo (58)
essendo la serie costituita dalle funzioni )(xfm che devono quindi godere delle
proprietà:
a) di poter rappresentare attraverso la serie:
)()(),( xfyAyxw mm (59)
la deformata di una qualsiasi striscia di piastra parallela all’asse x;
b) di soddisfare le condizioni al contorno secondo x.
In tal modo la ricerca dell’integrale generale dell’omogenea, viene ricondotta alla
determinazione delle sole funzioni Ym(y). Una serie di funzioni che gode delle
proprietà elencate risulta
a
xmsinxfm
)( (60)
E’ evidente però che la proprietà b) risulta soddisfatta solo nel caso in cui i lati x = 0
ed x = a siano semplicemente appoggiati; ciò restringe l’applicabilità del metodo allo
studio delle piastre che abbiano due lati opposti semplicemente appoggiati. Restano
invece del tutto arbitrarie le condizioni di vincolo sui lati y = 0 ed y = b.
Tuttavia, anche per condizioni di vincolo che non rispettino quanto detto, la
soluzione del problema può ancora ottenersi per sovrapposizione di varie soluzioni
elementari, ciascuna delle quali dedotte attraverso il metodo delle serie semplici.
Per la funzione Ym(y) si adotta la seguente espressione
y
m eAyY )(

23
La soluzione dell’equazione omogenea risulta quindi
a
xmsineAw y
m
o
1
(61)
dove A e sono costanti da determinare. Sostituendo questa espressione
nell’omogenea associata dell’equazione di Lagrange:
024
4
22
4
4
4
y
w
yx
w
x
w (62)
si ottiene:
0sen)()()( )()(24
a
xmyYyY
a
myY
a
m IVm
IImm
(63)
La soluzione non banale si ricava dall’equazione caratteristica
0
42
24
a
m
a
m
(64)
Per la risoluzione si pone *2 e dunque le soluzioni dell’equazione
caratteristica risultano
2
3
2
42
*
2,1
a
m
a
m
(65)
Poiché *1 e *
2 sono due numeri complessi coniugati, utilizzando la formula
derivante dalla relazioni di De Moivre, si ottengono le quattro radici dell’equazione
caratteristica che sono ancora numeri complessi e a coppie coniugati:
**111 ii
**222 ii (66)
**113 ii
**
224 ii
dove

24
12 , 12 , 2
2
*
a
m
, 2
23
4
*
b
m
(67)
L’espressione di Ym(y) può dunque essere scritta in forma reale
yDeyCeyBeyAeyY yyyym sencossencos)( (68)
per cui la soluzione dell’omogenea associata risulta, nella forma di serie semplice:
a
xmy
a
mDy
a
mCy
a
mBy
a
mAw
m
o
sensenhcoshcoshsenh
1
(69)
dove le costanti A, B, C, D si determinano imponendo le condizioni al
contorno; 2211 ,,, e quindi anche A, B, C, D sono funzione di m, che assume
valori interi dispari (m = 1,3,5,…) se il carico è simmetrico, e valori interi pari (m =
2,4,6,…) se il carico è emisimmetrico.
Per trovare la soluzione particolare dell’equazione differenziale si adottano le
seguenti due ipotesi per gli abbassamenti e per il carico:
a) a
xmsinaw
m
mp
1
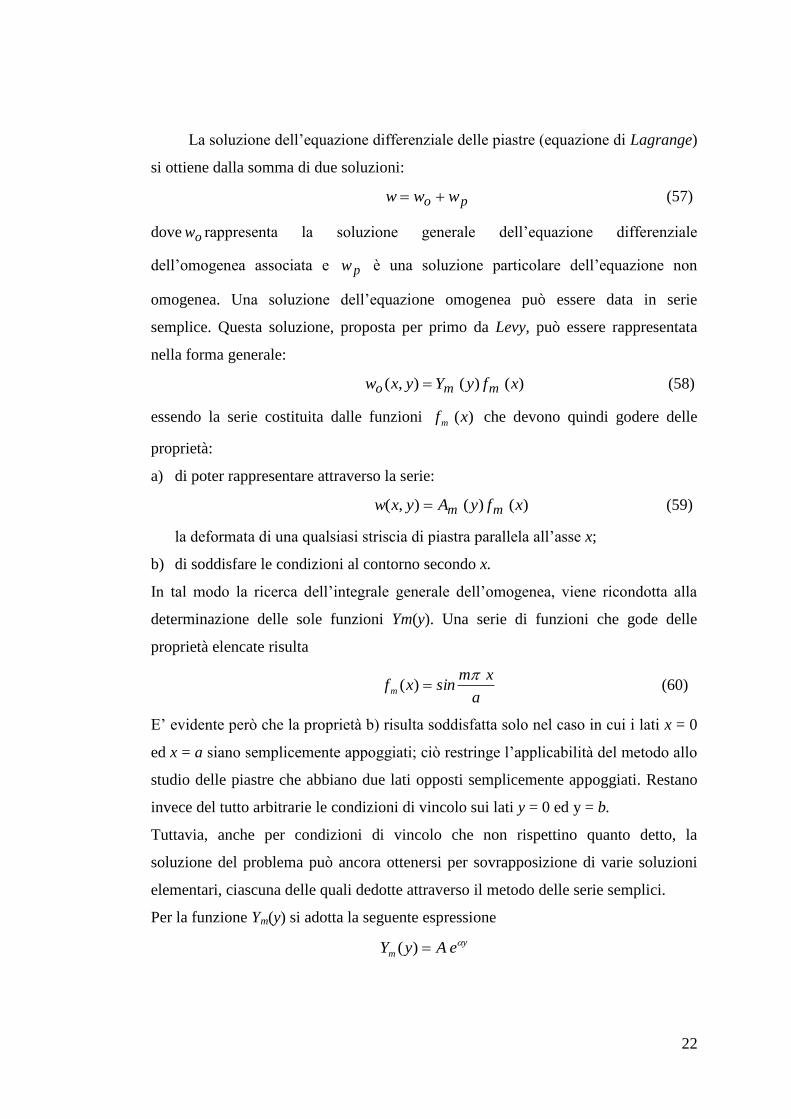
b) il carico p(x,y) sulla piastra può essere considerato come una serie di
carichi )(),......(),( 21 xpxpxp n ognuno applicato su una sottile striscia
parallela all’asse x come mostrato in Fig.12.
Quindi, il carico p(x), funzione della sola x, può essere espresso in serie di
Fourier come segue:
a
xmsinpxp
m
m
1
)( (70)
dove pm, sfruttando le proprietà delle funzioni circolari, risulta
dxa
xmsinxp
ap
a
m 0
)(2
(71)
Per la seconda ipotesi si perde la dipendenza dell’integrale particolare dalla variabile
y e dunque l’equazione della piastra assume la forma
D
p
x
w
4
4
(72)
25
Sostituendo nell’equazione (72) la soluzione particolare si ricava la relazione
tra i coefficienti ma e mp :
x
a
b
Fig. 12 - Piastra soggetta a carico p(x) costante lungo y.
4
m
a
D
pa m
m (73)
Quindi l’integrale particolare assume la forma definitiva:
a
xmsin
m
a
D
pw
m
mp
4
1
(74)
La soluzione completa è data dalla somma delle due espressioni (69) e (74)
nella forma seguente:
a
xmy
a
mDy
a
mCy
a
mBy
a
mA
m
a
D
pw
m
m
sensenhcoshcoshsenh
1
4
(75)
che rappresenta l’espressione generale della deformata di una piastra avente due lati
opposti semplicemente appoggiati e soggetta ad un carico generico.
Nel caso di carico uniformemente distribuito p(x) = po si ha che
pm = m
p4 (76)
La soluzione particolare diventa quindi:
a
xmsin
m
a
D
pw
m
mp
4
1
(77)

26
e la forma definitiva della soluzione completa è data dalla relazione
a
xmy
a
mDy
a
mCy
a
mBy
a
mA
m
a
Dm
pw
m
sensenhcoshcoshsenh
4
1
4
(78)
Per la ricerca delle caratteristiche di sollecitazione si utilizzano le relazioni
seguenti, ottenute derivando l’espressione dell’abbassamento (78)
Mx =
2
2
2
2
y
w
x
wD , My =
2
2
2
2
x
w
y
wD (79)
Mxy = Myx = yx
wD
2
Le forze di taglio verticali sono determinate dall’equilibrio dei momenti
dell’elemento:
yx
w
y
wD
x
M
y
MQ
yx
w
x
wD
y
M
x
MQ
xyy
y
xyxx
2
3
3
3
2
3
3
3
(80)
9 Piastre rettangolari: soluzione con serie doppie di Navier.
Si consideri una piastra comunque vincolata al contorno e sollecitata da un
carico generico: il problema dell’equilibrio elastico della piastra è risolto se si
determina la superficie elastica w, che definisce la configurazione della piastra,
equilibrata e congruente e compatibile sul contorno con i vincoli.
L’equilibrio e la congruenza (con i limiti derivanti dall’ipotesi di Kirchoff) risultano
rispettati se la funzione w soddisfa l’equazione di Lagrange; la compatibilità con i
vincoli è osservata se la w rispetta le condizioni al contorno associate.
La soluzione dell’equazione (30)che soddisfi le condizioni sopra citate può
essere espressa nella serie doppia di Navier come segue:
),(),(
1 1
yxwAyxw mn
m n
mn
(81)
Quindi la piastra rappresentata da 2 particelle collegate elasticamente,
ammetterà 2 configurazioni semplici di oscillazione wmn (autofunzioni).
27
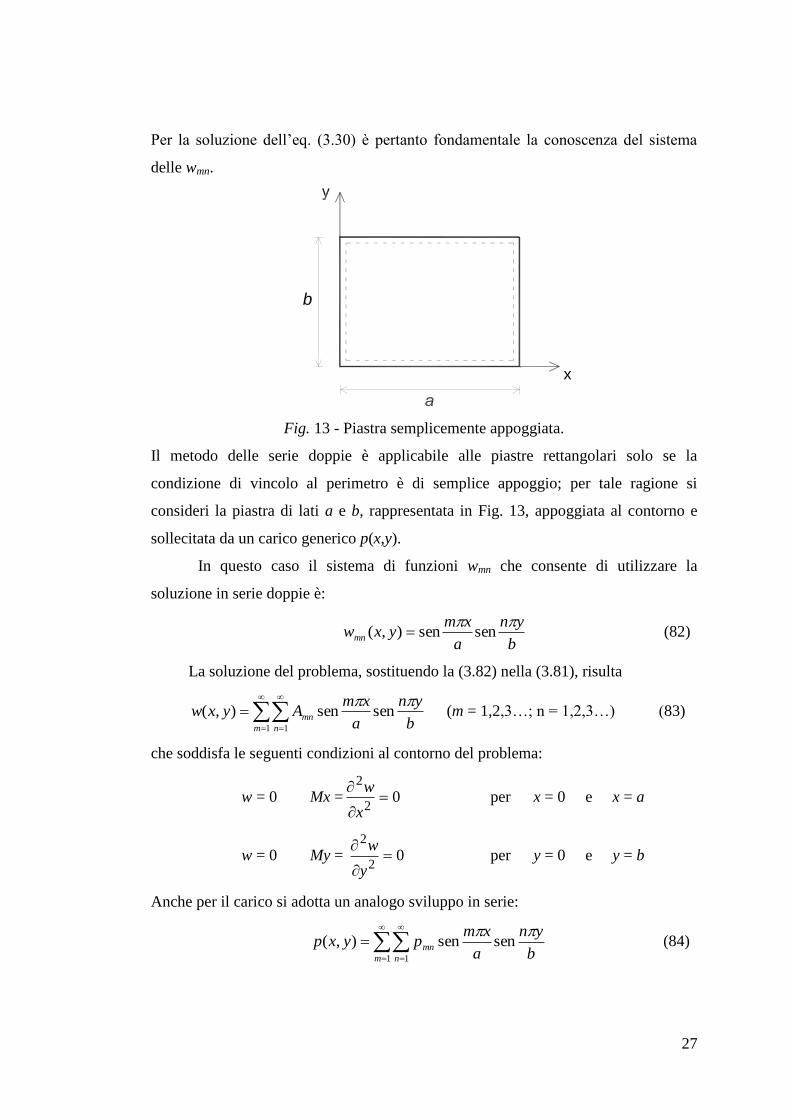
Per la soluzione dell’eq. (3.30) è pertanto fondamentale la conoscenza del sistema
delle wmn.
x
b
Fig. 13 - Piastra semplicemente appoggiata.
Il metodo delle serie doppie è applicabile alle piastre rettangolari solo se la
condizione di vincolo al perimetro è di semplice appoggio; per tale ragione si
consideri la piastra di lati a e b, rappresentata in Fig. 13, appoggiata al contorno e
sollecitata da un carico generico p(x,y).
In questo caso il sistema di funzioni wmn che consente di utilizzare la
soluzione in serie doppie è:
b
yn
a
xmyxwmn
sensen),( (82)
La soluzione del problema, sostituendo la (3.82) nella (3.81), risulta
b
yn
a
xmAyxw
m n
mn
sensen),(
1 1
(m = 1,2,3…; n = 1,2,3…) (83)
che soddisfa le seguenti condizioni al contorno del problema:
w = 0 Mx = 02
2
x
w per x = 0 e x = a
w = 0 My = 02
2
y
w per y = 0 e y = b
Anche per il carico si adotta un analogo sviluppo in serie:
b
yn
a
xmpyxp
m n
mn
sensen),(
1 1
(84)
28
dove il generico pmn, che dipende dal tipo e dalla posizione del carico applicato, è
espresso dalla relazione
db
yn
a
xmyxp
Np
mn
mn
sensen),(
12
(85)
4
abd
b
ynsen
a
xmsenN2
mn
(86)
Le costanti Amn si possono ricavare sostituendo la soluzione w nell’equazione della
piastra (30), quindi
b
yn
a
xm
a
mAD
m n
mn
1
4
1
sensen
b
yn
a
xm
b
n
a
mA
m n
mn
1
22
1
sensen2 (87)
),(sensen1
4
1
yxpb
yn
a
xm
b
nA
m n
mn
Sostituendo la soluzione w(x,y) e il carico p(x,y) sviluppati in serie di Fourier
nell’equazione di Lagrange (30), si ricavano così le costanti Amn dell’eq. (83):
D
C
b
n
a
mD
pA mn
mn
2
2
2
2
24
(88)
La deformata della piastra assume quindi l’espressione definitiva:
b
yn
a
xm
b
n
a
m
p
Dyxw
m n
mn
sensen
1),(
1 12
2
2
2
24
(89)
Le caratteristiche di sollecitazione, definite per unità di lunghezza, sono date
dalle derivate dell’abbassamento w(x, y), analogamente al caso degli sviluppi in serie
semplice secondo le relazioni (79) e (80). Per proporzionare le sezioni, i valori
ottenuti devono essere moltiplicati per la rispettiva larghezza efficace.
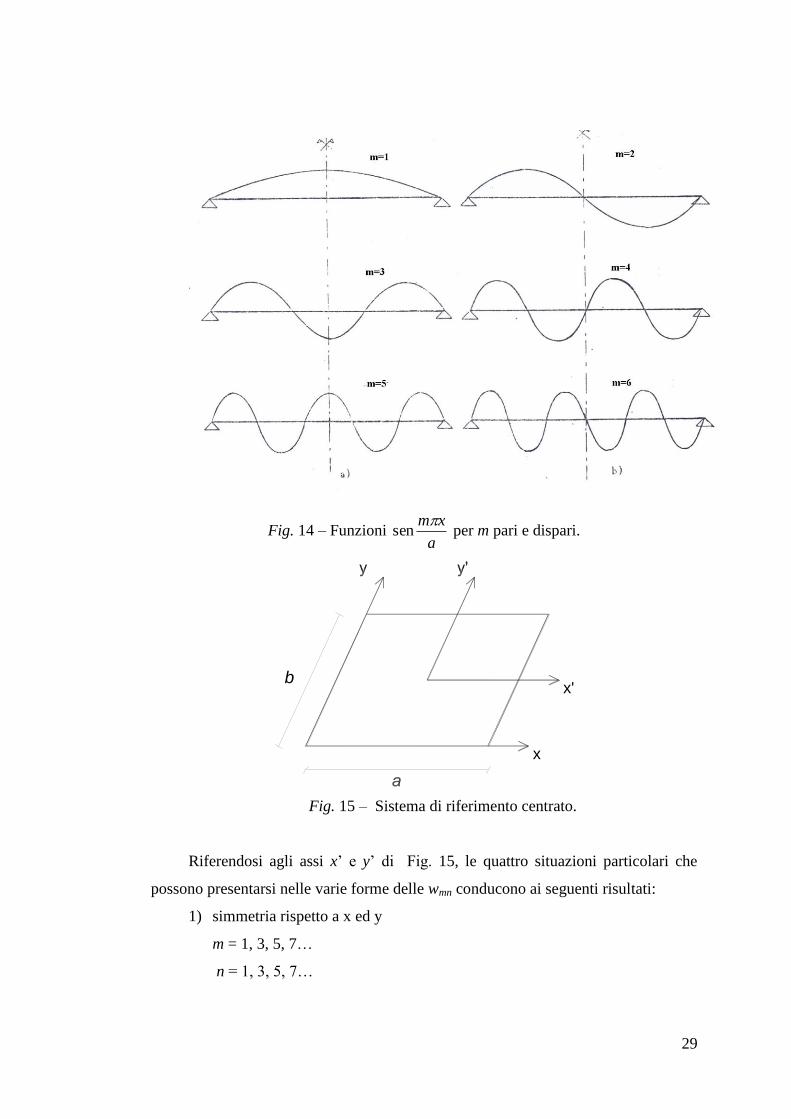
Nella Fig. 14 sono rappresentate le funzioni a
xmsen per m pari e per m
dispari. E’ evidente che tutte le funzioni con m dispari sono simmetriche rispetto alla
sezione di mezzeria e quelle con m pari sono invece emisimmetriche.
29
Fig. 14 – Funzioni a
xmsen per m pari e dispari.
x
bx'
Fig. 15 – Sistema di riferimento centrato.
Riferendosi agli assi x’ e y’ di Fig. 15, le quattro situazioni particolari che
possono presentarsi nelle varie forme delle wmn conducono ai seguenti risultati:
1) simmetria rispetto a x ed y
m = 1, 3, 5, 7…
n = 1, 3, 5, 7…
30
2) emisimmetria rispetto a y e simmetria rispetto a x
m = 2, 4, 6, 8…
n = 1, 3, 5, 7…
3) simmetria rispetto a y ed emisimmetria rispetto a x
m = 1, 3, 5, 7…
n = 2, 4, 6, 8…
4) simmetria rispetto a x ed y
m = 2, 4, 6, 8…
n = 2, 4, 6, 8…
Nel caso in cui la piastra sia sottoposta ad un carico uniformemente distribuito
p agente su tutta l’area, l’eq. (85) risulta:
mn
pdxdy
b
yn
a
xm
ab
pp
a
o
b
mn 2
0
16sensen
4
(90)
essendo m ed n numeri dispari per la simmetria della soluzione. Sostituendo la (90)
nella (89) si ottiene come deformata della piastra l’espressione seguente:
1 1
2
2
2
2
26
sensen16
),(m n
b
n
a
mmn
b
yn
a
xm
D
pyxw
(91)
Lo spostamento massimo si manifesta ovviamente al centro della piastra, per
x = a/2 e y = b/2 si ha quindi:
1 12
2
2
2
2
12
6max)1(16
m n
nm
b
n
a
mmn
D
pw
(92)
Anche i massimi momenti flettenti si verificano in mezzeria e valgono:
1
2
1 12
2
22
2
22
4
2
max )1(16
nm
m n
x
nmmn
nm
paM
(93)
31
1
2
1 12
2
22
2
2
2
4
2
max )1(16
nm
m n
y
nmmn
mn
paM
(94)
essendo un coefficiente pari al rapporto tra i lati
a
b
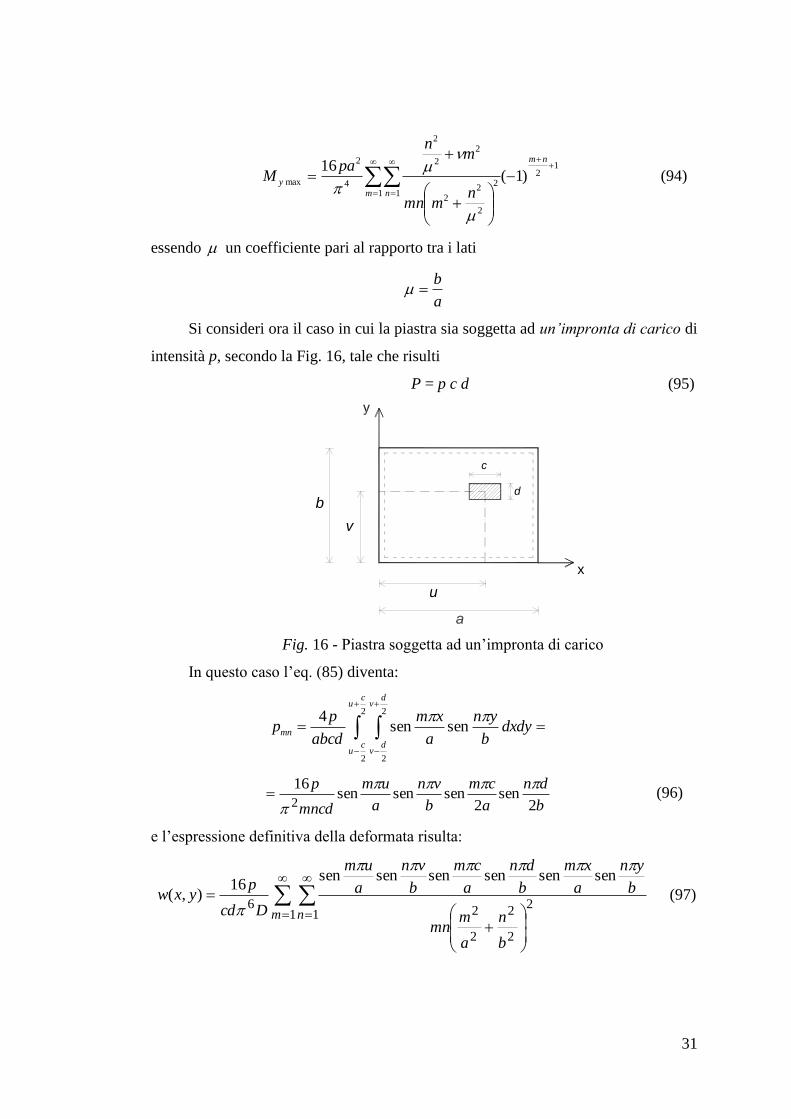
Si consideri ora il caso in cui la piastra sia soggetta ad un’impronta di carico di
intensità p, secondo la Fig. 16, tale che risulti
P = p c d (95)
x
bd
c
v
u
Fig. 16 - Piastra soggetta ad un’impronta di carico
In questo caso l’eq. (85) diventa:
dxdyb
yn
a
xm
abcd
pp
cu
cu
dv
dv
mn
sensen
4 2
2
2
2
b
dn
a
cm
b
vn
a
um
mncd
p
2sen
2sensensen
16
2
(96)
e l’espressione definitiva della deformata risulta:
1 12
2
2
2
26
sensensensensensen16
),(
m n
b
n
a
mmn
b
yn
a
xm
b
dn
a
cm
b
vn
a
um
Dcd
pyxw
(97)
32
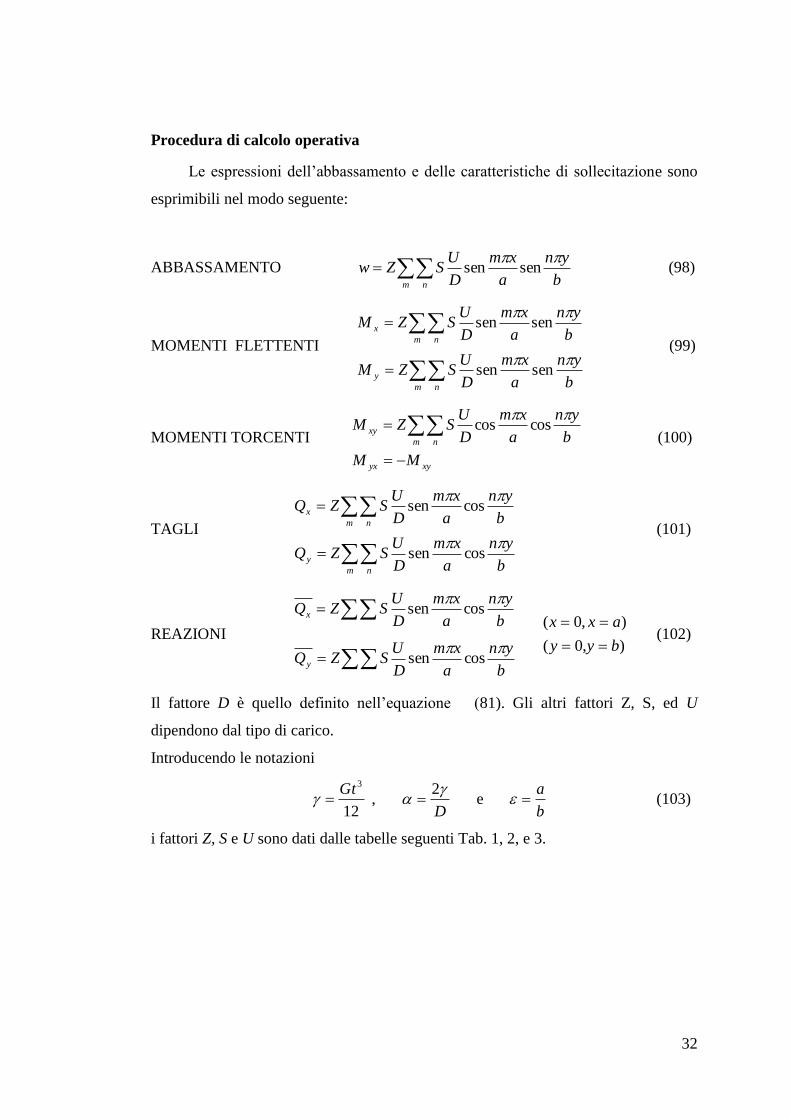
Procedura di calcolo operativa
Le espressioni dell’abbassamento e delle caratteristiche di sollecitazione sono
esprimibili nel modo seguente:
ABBASSAMENTO b
yn
a
xm
D
USZw
m n
sensen (98)
MOMENTI FLETTENTI
b
yn
a
xm
D
USZM
b
yn
a
xm
D
USZM
m n
y
m n
x
sensen
sensen
(99)
MOMENTI TORCENTI
xyyx
m n
xy
MM
b
yn
a
xm
D
USZM
coscos (100)
TAGLI
b
yn
a
xm
D
USZQ
b
yn
a
xm
D
USZQ
m n
y
m n
x
cossen
cossen
(101)
REAZIONI
b
yn
a
xm
D
USZQ
b
yn
a
xm
D
USZQ
y
x
cossen
cossen
),0(
),0(
byy
axx
(102)
Il fattore D è quello definito nell’equazione (81). Gli altri fattori Z, S, ed U
dipendono dal tipo di carico.
Introducendo le notazioni
12
3Gt ,
D
2 e
b
a (103)
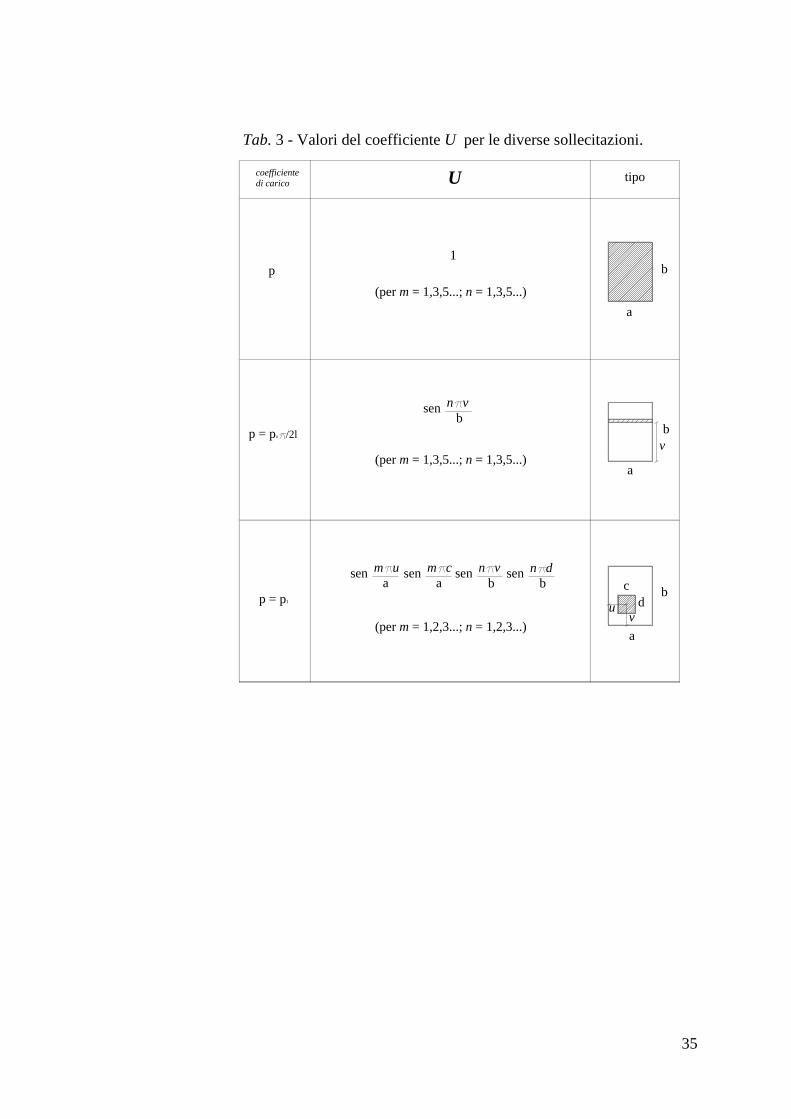
i fattori Z, S e U sono dati dalle tabelle seguenti Tab. 1, 2, e 3.
33
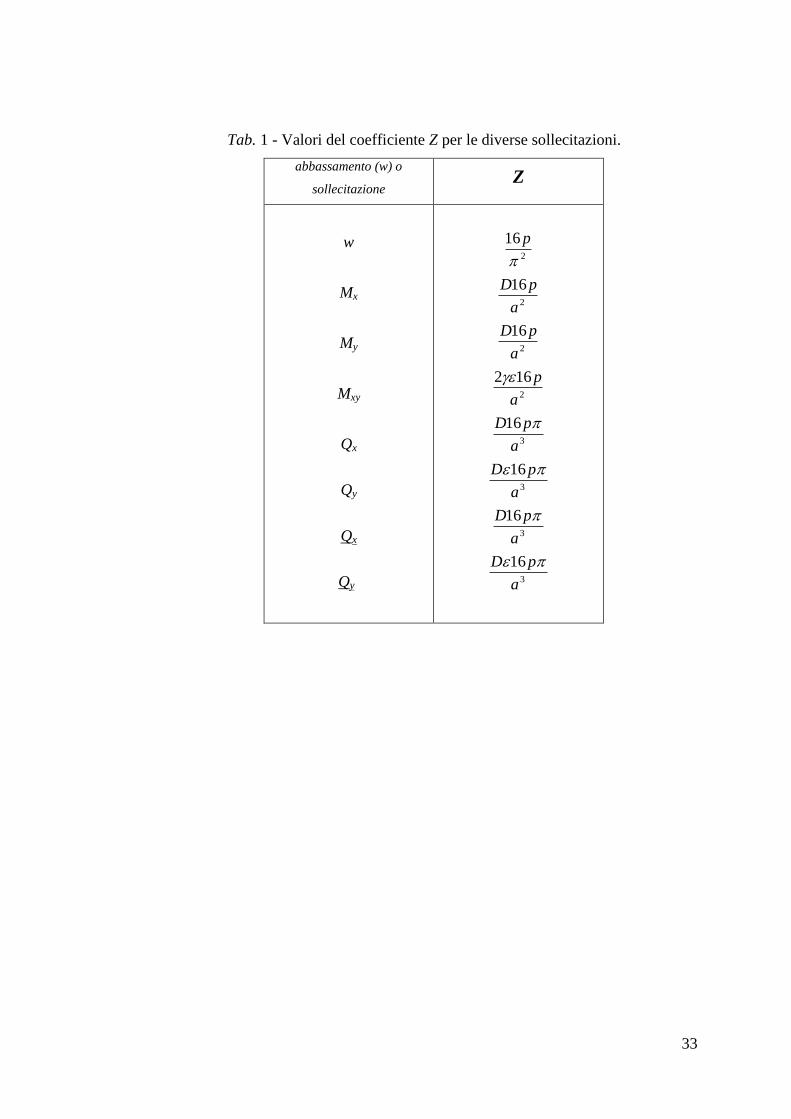
Tab. 1 - Valori del coefficiente Z per le diverse sollecitazioni.
abbassamento (w) o
sollecitazione Z
w
Mx
My
Mxy
Qx
Qy
Qx
Qy
2
16
p
2
16
a
pD
2
16
a
pD
2
162
a
p
3
16
a
pD
3
16
a
pD
3
16
a
pD
3
16
a
pD
34
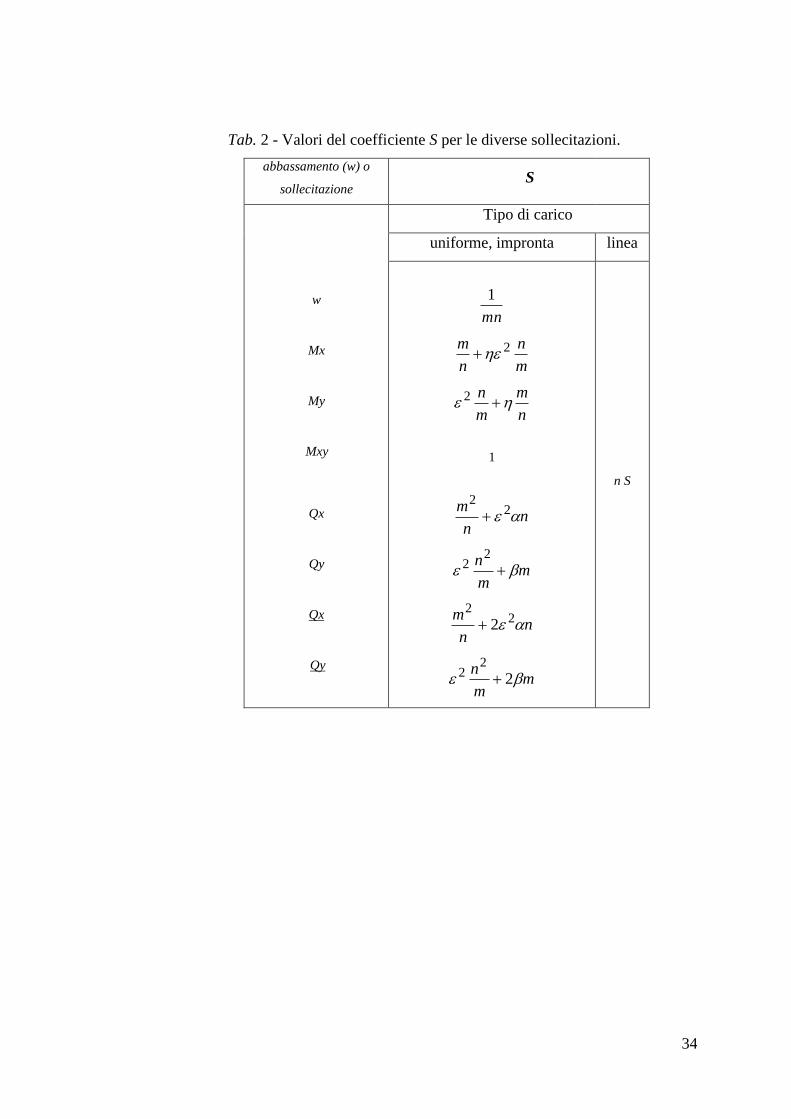
Tab. 2 - Valori del coefficiente S per le diverse sollecitazioni.
abbassamento (w) o
sollecitazione S
Tipo di carico
w
Mx
My
Mxy
Qx
Qy
Qx
Qy
uniforme, impronta linea
mn
1
m
n
n
m 2
n
m
m
n 2
1
nn
m 2
2
mm
n
22
nn
m 2
2
2
mm
n 2
22
n S
35
Tab. 3 - Valori del coefficiente U per le diverse sollecitazioni.
coefficiente
di caricotipoU
p
p = po /2l
p = p1
1
(per m = 1,3,5...; n = 1,3,5...)
sen
(per m = 1,3,5...; n = 1,3,5...)
(per m = 1,2,3...; n = 1,2,3...)
b
a
b
a
b
a
v
c
duv
n v
b
sen n v
bsen n d
bsen m c
asen m u
a

36
Applicazione
I metodi di soluzione discussi nei paragrafi precedenti sono stati applicati al
modello di piastra isotropa appoggiata su tutti i lati rappresentata in Fig. 17.
lo
sezione trasversale
xa = 100 cm
b =
100
cm t = 5 cm
Fig. 17 - Schema del modello sperimentale.
La soluzione in serie doppia di Navier con il metodo di calcolo proposto è stata
impiegata per condizione di carico uniformemente distribuito (p = 1 kg/cmq).
Le condizioni al contorno, per la piastra semplicemente appoggiata, risultano:
0
0
xM
w per x = 0 , x = a (104)
0
0
yM
w per y = 0 , y = b
La stessa piastra, sottoposta a carico uniformemente distribuito, è stata risolta
con la serie semplice di Levy. In questo caso le condizioni al contorno sono:
0
0
yM
w per y = 0 , y = b (105)
Si mostrano i risultati per alcuni punti, riassunti nelle tabelle seguenti
relativamente alla sola condizione di carico uniforme:
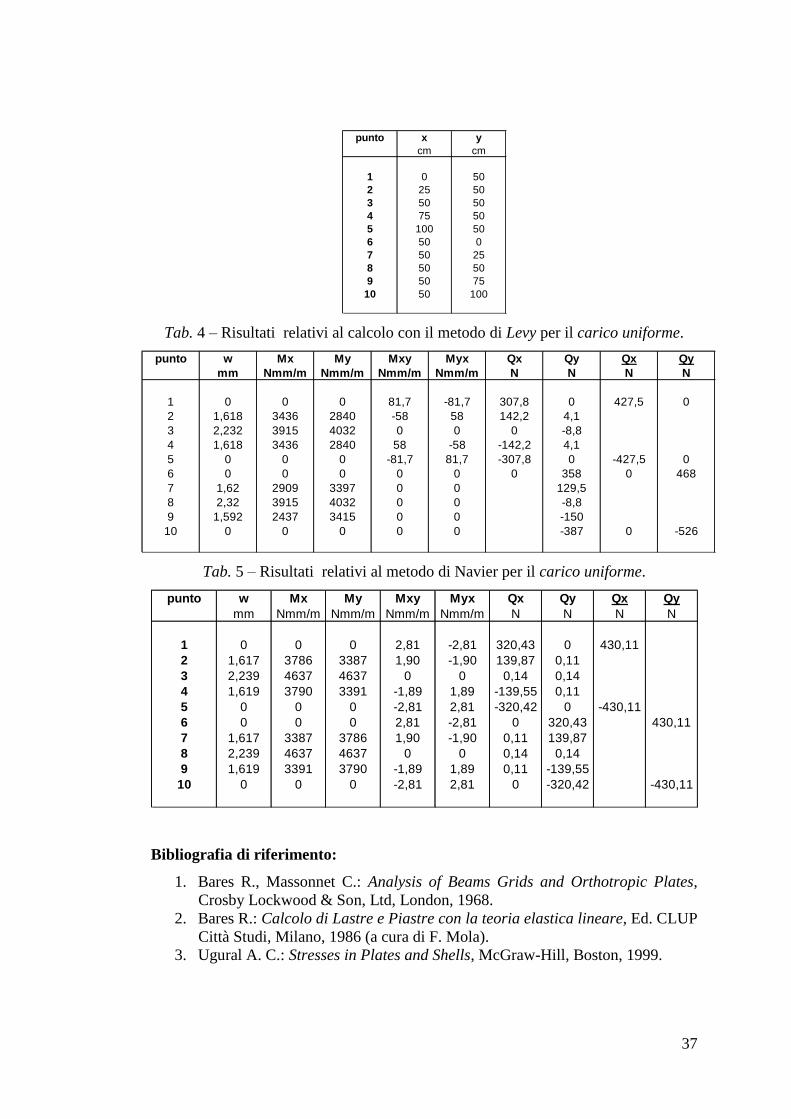
37
punto x y
cm cm
1 0 50
2 25 50
3 50 50
4 75 50
5 100 50
6 50 0
7 50 25
8 50 50
9 50 75
10 50 100
Tab. 4 – Risultati relativi al calcolo con il metodo di Levy per il carico uniforme.
punto w Mx My Mxy Myx Qx Qy Qx Qy
mm Nmm/m Nmm/m Nmm/m Nmm/m N N N N
1 0 0 0 81,7 -81,7 307,8 0 427,5 0
2 1,618 3436 2840 -58 58 142,2 4,1
3 2,232 3915 4032 0 0 0 -8,8
4 1,618 3436 2840 58 -58 -142,2 4,1
5 0 0 0 -81,7 81,7 -307,8 0 -427,5 0
6 0 0 0 0 0 0 358 0 468
7 1,62 2909 3397 0 0 129,5
8 2,32 3915 4032 0 0 -8,8
9 1,592 2437 3415 0 0 -150
10 0 0 0 0 0 -387 0 -526
Tab. 5 – Risultati relativi al metodo di Navier per il carico uniforme.
punto w Mx My Mxy Myx Qx Qy Qx Qy
mm Nmm/m Nmm/m Nmm/m Nmm/m N N N N
1 0 0 0 2,81 -2,81 320,43 0 430,11
2 1,617 3786 3387 1,90 -1,90 139,87 0,11
3 2,239 4637 4637 0 0 0,14 0,14
4 1,619 3790 3391 -1,89 1,89 -139,55 0,11
5 0 0 0 -2,81 2,81 -320,42 0 -430,11
6 0 0 0 2,81 -2,81 0 320,43 430,11
7 1,617 3387 3786 1,90 -1,90 0,11 139,87
8 2,239 4637 4637 0 0 0,14 0,14
9 1,619 3391 3790 -1,89 1,89 0,11 -139,55
10 0 0 0 -2,81 2,81 0 -320,42 -430,11
Bibliografia di riferimento:
1. Bares R., Massonnet C.: Analysis of Beams Grids and Orthotropic Plates,
Crosby Lockwood & Son, Ltd, London, 1968.
2. Bares R.: Calcolo di Lastre e Piastre con la teoria elastica lineare, Ed. CLUP
Città Studi, Milano, 1986 (a cura di F. Mola).
3. Ugural A. C.: Stresses in Plates and Shells, McGraw-Hill, Boston, 1999.
Recommended




![Vévfolpm ]0,uóm l99ó. iúnius 3. ffi2009/08/05 · lr i.9 iL I - lor l-\Í I I! l I I I ^ lf-'-lF-l j l t* I 1 i l 'l' I rI i..lot.'to) l l I I "io I i l-j ii ,y a,É 9 {J lr-](https://img.pdfslide.tips/doc/110x75/5f4448dc2d32ee5c9c59cf8f/vvfolpm-0um-l99-inius-3-ffi-20090805-lr-i9-il-i-lor-l-i.jpg)