
PROYECTO DE GRADO
DISEÑO CONCEPTUAL DEL SISTEMA AERODINAMICO DE UNA AERONAVE
STOL PARA TRANSPORTAR PERSONAL Y EQUIPO DE DESMINADO EN
COLOMBIA
UNIVERSIDAD DE LOS ANDES
FACULTAD DE INGENIERÍA
DEPARTAMENTO DE INGENIERÍA MECÁNICA
POR: LUIS FELIPE HOYOS CAVIEDES
ASESOR: PhD OMAR DARIO LOPEZ MEJIA
BOGOTÁ, COLOMBIA
NOVIEMBRE DE 2018
2
INDICE
1. Nomenclatura………………………………………………………………………3
2. Ecuaciones………………………………………………………………………....4
3. Introducción………………………………………………………………………..6
4. Marco Teórico.……………………………………………………………………..7
4.1 Tipos aeronaves STOL …………………………………………………....7
4.2 Recomendaciones generales de diseño…………………………………….10
5. Metodología………………………………………………………………………...13
6. Objetivos…………………………………………………………………………....13
6.1 Objetivo principal ………………………………………………………….13
6.2 Objetivos específicos ……………………………………………………....13
7. Estimación de pesos………………………………………………………………...14
7.1 Peso payload………………………………………………………………..14
7.2 Peso Combustible…………………………………………………………..15
7.3 Peso vacío………………………………………………………………….17
8. Dimensionamiento preliminar……………………………………………………....18
8.1 Velocidad de entrada en pérdidas…………………………………………..18
8.2 Requerimientos de distancia de despegue………………………………….18
8.3 Requerimientos de distancia de aterrizaje………………………………….19
8.4 Resumen requerimientos de diseño………………………………………...20
9. Sistemas de alta sustentación……………………………………………………….20
9.1 Geometría del ala…………………………………………………………..20
9.2 Posición del ala…………………………………………………………….22
9.3 Puntas del ala……………………………………………………………....22
9.4 Dispositivos de alta sustentación…………………………………………..23
9.5 Perfil de referencia………………………………………………………....24
9.6 Construcción del perfil……………………………………………………..25
9.7 Análisis despegue…………………………………………………………..25
10. Sistema de fuselaje………………………………………………………………….28
10.1 Dimensiones cabina……………………………………………………….28
10.2 Dimensiones área transversal……………………………………………..29
10.3 Dimensiones generales…………………………………………………....30
11. Sistema de empenaje………………………………………………………………..31
11.1 Tipos de cola……………………………………………………………...31
11.2 Dimensionamiento y geometría general…………………………………..32
11.2.1 Estabilizador horizontal……………………………………………32
11.2.2 Estabilizador vertical………………………………………………32
11.3 Estabilidad estática longitudinal en fase crucero……………………….....34
12. Simulación software ADS light ………………………………………………….....36
13. CAD conceptual Air-H1 ……………………………………………………………36
14. Especificaciones Air-H1……………………………………………………………..37
15. Trabajo futuro………………………………………………………………………..37
16. Conclusiones………………………………………………………………………...37
17. Bibliografía…………………………………………………………………………..38
18. Anexos ………………………………………………………………………………39

3
1. NOMENCLATURA
𝑊𝑡𝑜 𝑃𝑒𝑠𝑜 𝑡𝑜𝑡𝑎𝑙 𝑑𝑒𝑠𝑝𝑒𝑔𝑢𝑒
𝑊𝑝𝑙 𝑃𝑒𝑠𝑜 𝑝𝑎𝑦𝑙𝑜𝑎𝑑
𝑊𝑓 𝑃𝑒𝑠𝑜 𝐶𝑜𝑚𝑏𝑢𝑠𝑡𝑖𝑏𝑙𝑒
𝑊𝑒 𝑃𝑒𝑠𝑜 𝑣𝑎𝑐𝑖𝑜
𝑀𝑓𝑓 𝐹𝑟𝑎𝑐𝑐𝑖𝑜𝑛 𝑑𝑒 𝑐𝑜𝑚𝑏𝑢𝑠𝑡𝑖𝑏𝑙𝑒 𝑚𝑖𝑠𝑖𝑜𝑛
𝑊𝑓𝑢𝑠𝑒𝑑 𝑃𝑒𝑠𝑜 𝑐𝑜𝑚𝑏𝑢𝑠𝑡𝑖𝑏𝑙𝑒 𝑢𝑠𝑎𝑑𝑜
𝑊𝑓𝑟𝑒𝑠 𝑃𝑒𝑠𝑜 𝑐𝑜𝑚𝑏𝑢𝑠𝑡𝑖𝑏𝑙𝑒 𝑟𝑒𝑠𝑒𝑟𝑣𝑎
𝑊𝑓 𝑃𝑒𝑠𝑜 𝑐𝑜𝑚𝑏𝑢𝑠𝑡𝑖𝑏𝑙𝑒 𝑡𝑜𝑡𝑎𝑙
𝑊𝑜𝑒 𝑃𝑒𝑠𝑜 𝑜𝑝𝑒𝑟𝑎𝑡𝑖𝑣𝑜 𝑣𝑎𝑐𝑖𝑜
𝑉𝑆 𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑒𝑛𝑡𝑟𝑎𝑑𝑎 𝑒𝑛 𝑝𝑒𝑟𝑑𝑖𝑑𝑎𝑠 (𝑓𝑙𝑎𝑝𝑠 𝑑𝑒𝑠𝑝𝑙𝑒𝑔𝑎𝑑𝑜𝑠)
𝑉𝑇𝑂 𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑑𝑒 𝑑𝑒𝑠𝑝𝑒𝑔𝑢𝑒
𝑉𝐿𝐴𝑁 𝑉𝑒𝑙𝑜𝑐𝑖𝑑𝑎𝑑 𝑑𝑒 𝑎𝑡𝑒𝑟𝑟𝑖𝑧𝑎𝑗𝑒
𝑊
𝑆 𝐶𝑎𝑟𝑔𝑎 𝑎𝑙𝑎𝑟
𝑊
𝑃 𝐶𝑎𝑟𝑔𝑎 𝑑𝑒 𝑝𝑜𝑡𝑒𝑛𝑐𝑖𝑎
𝜌 𝐷𝑒𝑛𝑠𝑖𝑑𝑎𝑑 𝑑𝑒𝑙 𝑎𝑖𝑟𝑒
𝜎 𝑅𝑎𝑧𝑜𝑛 𝑑𝑒 𝑑𝑒𝑛𝑠𝑖𝑑𝑎𝑑 𝑑𝑒𝑙 𝑎𝑖𝑟𝑒
𝐹𝐴𝑅 𝐹𝑒𝑑𝑒𝑟𝑎𝑙 𝑎𝑣𝑖𝑎𝑡𝑖𝑜𝑛 𝑟𝑒𝑔𝑢𝑙𝑎𝑡𝑖𝑜𝑛𝑠
𝑆𝑇𝑂 𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑑𝑒𝑠𝑝𝑒𝑔𝑢𝑒 𝑡𝑜𝑡𝑎𝑙
𝑆𝑇𝑂𝐺 𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑑𝑒𝑠𝑝𝑒𝑔𝑢𝑒 𝑡𝑖𝑒𝑟𝑟𝑎
𝑇𝑂𝑃23 𝐹𝐴𝑅 23 𝑝𝑎𝑟𝑎𝑚𝑒𝑡𝑟𝑜 𝑑𝑒 𝑑𝑒𝑠𝑝𝑒𝑔𝑢𝑒
𝐶𝐿 𝐶𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑠𝑢𝑠𝑡𝑒𝑛𝑡𝑎𝑐𝑖ó𝑛
𝑡
𝑐 𝑅𝑎𝑧𝑜𝑛 𝑑𝑒 𝑒𝑠𝑝𝑒𝑠𝑜𝑟 𝑑𝑒 𝑝𝑒𝑟𝑓𝑖𝑙
𝑐 𝐶𝑢𝑒𝑟𝑑𝑎
𝐶𝐴𝑀 𝐶𝑢𝑒𝑟𝑑𝑎 𝑎𝑒𝑟𝑜𝑑𝑖𝑛𝑎𝑚𝑖𝑐𝑎 𝑚𝑒𝑑𝑖𝑎
𝐴 𝑅𝑒𝑙𝑎𝑐𝑖𝑜𝑛 𝑑𝑒 𝑎𝑠𝑝𝑒𝑐𝑡𝑜
𝑏 𝐸𝑛𝑣𝑒𝑟𝑔𝑎𝑑𝑢𝑟𝑎
𝜆 𝑅𝑒𝑙𝑎𝑐𝑖𝑜𝑛 𝑑𝑒 𝑡𝑎𝑝𝑒𝑟𝑎𝑑𝑜
4
𝑆 𝐴𝑟𝑒𝑎 𝑎𝑙𝑎𝑟
𝜇 𝐶𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑓𝑟𝑖𝑐𝑐𝑖ó𝑛
𝑑𝑓 𝐷𝑖𝑎𝑚𝑒𝑡𝑟𝑜 𝑒𝑞𝑢𝑖𝑣𝑎𝑙𝑒𝑛𝑡𝑒 𝑓𝑢𝑠𝑒𝑙𝑎𝑗𝑒
𝑙𝑓 𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑓𝑢𝑠𝑒𝑙𝑎𝑗𝑒
𝑙𝑓𝑐 𝐿𝑜𝑛𝑔𝑖𝑡𝑢𝑑 𝑒𝑚𝑝𝑒𝑛𝑎𝑗𝑒
𝜃𝑓𝑐 𝐴𝑛𝑔𝑢𝑙𝑜 𝑒𝑚𝑝𝑒𝑛𝑎𝑗𝑒
𝐶𝐻𝑇 𝐶𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑣𝑜𝑙𝑢𝑚𝑒𝑛 𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 ℎ𝑜𝑟𝑖𝑧𝑜𝑛𝑡𝑎𝑙
𝐶𝑉𝑇 𝐶𝑜𝑒𝑓𝑖𝑐𝑖𝑒𝑛𝑡𝑒 𝑑𝑒 𝑣𝑜𝑙𝑢𝑚𝑒𝑛 𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 𝑣𝑒𝑟𝑡𝑖𝑐𝑎𝑙
𝑙ℎ 𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑐𝑒𝑛𝑡𝑟𝑜𝑠 𝑎𝑒𝑟𝑜𝑑𝑖𝑛𝑎𝑚𝑖𝑐𝑜𝑠 𝑡𝑜𝑡𝑎𝑙 𝑦 𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 ℎ𝑜𝑟𝑖𝑧𝑜𝑛𝑡𝑎𝑙
𝑙𝑣 𝐷𝑖𝑠𝑡𝑎𝑛𝑐𝑖𝑎 𝑐𝑒𝑛𝑡𝑟𝑜𝑠 𝑎𝑒𝑟𝑜𝑑𝑖𝑛𝑎𝑚𝑖𝑐𝑜𝑠 𝑡𝑜𝑡𝑎𝑙 𝑦 𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 𝑣𝑒𝑟𝑡𝑖𝑐𝑎𝑙
𝑆ℎ 𝐴𝑟𝑒𝑎 𝑦 𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 ℎ𝑜𝑟𝑖𝑧𝑜𝑛𝑡𝑎𝑙
𝑆𝑣 𝐴𝑟𝑒𝑎 𝑦 𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 𝑣𝑒𝑟𝑡𝑖𝑐𝑎𝑙
𝐿𝑤𝑓 𝐹𝑢𝑒𝑟𝑧𝑎 𝑠𝑢𝑠𝑡𝑒𝑛𝑡𝑎𝑐𝑖𝑜𝑛 𝑎𝑙𝑎𝑠 𝑦 𝑓𝑢𝑠𝑒𝑙𝑎𝑗𝑒
𝐿ℎ 𝐹𝑢𝑒𝑟𝑧𝑎 𝑠𝑢𝑠𝑡𝑒𝑛𝑡𝑎𝑐𝑖𝑜𝑛 𝑒𝑠𝑡𝑎𝑏𝑖𝑙𝑖𝑧𝑎𝑑𝑜𝑟 ℎ𝑜𝑟𝑖𝑧𝑜𝑛𝑡𝑎𝑙
𝑀𝑜𝑤𝑓 𝑀𝑜𝑚𝑒𝑛𝑡𝑜 𝑑𝑒 𝑐𝑎𝑏𝑒𝑐𝑒𝑜 𝑎𝑒𝑟𝑜𝑑𝑖𝑛𝑎𝑚𝑖𝑐𝑜 𝑑𝑒 𝑎𝑙𝑎𝑠 𝑦 𝑓𝑢𝑠𝑒𝑙𝑎𝑗𝑒
2. ECUACIONES
(1) 𝑅𝑐𝑟 = 375 ∗ (𝑛𝑝
𝑐𝑝) 𝑐𝑟 ∗ (
𝐿
𝐷) 𝑐𝑟 ∗ 𝐿𝑛 (
𝑊4
𝑊5) [1]
(2) 𝐸𝑙𝑡𝑟 = 375 ∗ (1
𝑉𝑙𝑡𝑟) ∗ (
𝑛𝑝
𝑐𝑝) 𝑙𝑡𝑟 ∗ 𝐿𝑛 (
𝑊5
𝑊6) [1]
(3) 𝑊𝑓𝑢𝑠𝑒𝑑 = (1 − 𝑀𝑓𝑓) ∗ 𝑊𝑡 [1]
(4) 𝑊𝑓 = 𝑊𝑓𝑢𝑠𝑒𝑑 + 𝑊𝑓𝑟𝑒𝑠 [1]
(5) 𝑊𝑜𝑒𝑡𝑒𝑛𝑡 = 𝑊𝑡𝑜 − 𝑊𝑓 − 𝑊𝑝𝑙 [1]
(6) 𝑊𝑒𝑡𝑒𝑛𝑡 = 𝑊𝑜𝑒𝑡𝑒𝑛𝑡 − (𝑊𝑡𝑜 ∗ 0,005) − 𝑊𝑝𝑙 [1]

5
(7) 𝑉𝑆 = √2 𝑊
𝑆
𝜌 𝐶𝐿𝑚𝑎𝑥
[1]
(8) 𝑆𝑇𝑂 = 1,66𝑆𝑇𝑂𝐺 [1]
(9) 𝑆𝐿 = 1,938𝑆𝐿𝐺 [1]
(10) 𝑇𝑂𝑃23 =(
𝑊
𝑆)
𝑇𝑂(
𝑊
𝑃)
𝑇𝑂
𝜎 𝐶𝐿𝑚𝑎𝑥𝑇𝑂
[1]
(11) 𝐶𝐿 =𝐿
1
2𝜌𝑉2𝑆
(12) 𝐶𝐷 =𝐷
1
2𝜌𝑉2𝑆
(13) 𝐶𝑀 =𝑊
1
2𝜌𝑉2𝑆2
(14) 𝛴𝐹𝑥 = 𝐹𝑒𝑚𝑝 − 𝐹𝑎𝑟𝑟𝑎𝑠𝑡𝑟𝑒 − 𝐹𝑓𝑟 = 𝑚𝑎
(15) 𝑙𝑓 = 𝑎𝑊𝑡𝑜𝑐 [2]
(16) 𝐶𝐻𝑇 =𝐿ℎ∗𝑆ℎ
𝐶𝑎𝑚∗𝑆 [3]
(17) 𝐶𝑉𝑇 =𝐿𝑣∗𝑆𝑣
𝐶𝑎𝑚∗𝑆 [3]
(18) 𝑙ℎ/𝑣 = 𝐾𝑐√4∗𝐶𝑎𝑚∗𝑆∗𝐶𝑉𝐻/𝐶𝑉𝑇
𝛱∗𝐷𝑓 [3]
(19) 𝐿𝑤𝑓 =1
2𝜌 ∗ 𝑉2 ∗ 𝑆 ∗ 𝐶𝑙𝑤𝑓 [4]
(20) 𝐿ℎ =1
2𝜌 ∗ 𝑉2 ∗ 𝑆ℎ ∗ 𝐶𝑙ℎ [4]
(21) 𝑀𝑜𝑤𝑓 =1
2𝜌 ∗ 𝑉2 ∗ 𝑆 ∗ 𝐶𝑚𝑜𝑤𝑓 ∗ 𝐶𝑎𝑚 [4]

6
3. INTRODUCCIÓN
El conflicto armado en Colombia ha traído innumerable cantidad de víctimas y familias
afectadas durante más de cincuenta años. La desmovilización de las FARC representa un
gran paso hacia la paz duradera, pero es necesario seguir trabajando con los demás grupos
al margen de la ley para proteger a toda la comunidad.
Uno de los más grandes problemas a raíz del conflicto armado son las minas antipersonal
(MAP), las municiones sin explosionar (MUSE) y los artefactos explosivos improvisados
(AEI) en las zonas rurales del territorio Colombiano. Entre las víctimas de encuentran
personas de la fuerza pública en un 61%, y el resto población civil de un variado rango de
edades.
Según la acción integral contra minas antipersonal hasta el 31 de marzo del presente año se
han registrado 11556 víctimas. Una de las cosas más preocupantes del asunto es la alta tasa
de mortalidad asociada con estos accidentes. Para las minas antipersonal el 20% de las
victimas fallece, mientas que en las municiones sin explosionar (donde el 62% son menores
de edad) es del 25%. El porcentaje de las víctimas que no fallece puede sufrir perdida de
miembros o queda con discapacidades físicas o mentales. Las comunidades indígenas
también han sido afectadas en gran medida por este problema [5].
Las minas colocadas por el gobierno nacional son conocidas y en los próximos años serán
retiradas por completo. El verdadero problema son aquellas colocadas por los grupos al
margen de la ley, ya que las colocaban en zonas secretas para “proteger” sus campamentos.
Estas zonas se encuentran muy retiradas de las ciudades y municipios grandes, y solo tienen
limitados modos de acceso diferentes de llegar caminando.
Los cinco departamentos con mayor número de accidentes al año son Antioquia, Nariño,
Meta, Cauca y Norte de Santander. Cuatro de estos cinco departamentos se encuentran en la
zona de la cordillera de los Andes o alguna de sus ramificaciones. La topografía de estas
regiones dificulta aún más la búsqueda de zonas posibles de minas antipersonas [5].
Actualmente, hay mucho desarrollo e investigación para mejorar las técnicas de desminado.
Se busca cubrir áreas más grandes en menores tiempos, siempre teniendo como foco
principal la vida de las personas que lo realizan. Aunque se ha avanzado bastante, el
problema de acceso a las zonas de desminado sigue siendo un problema fundamental. Si se
continua el ritmo actual de trabajo con las técnicas actuales, no se podrá afirmar un
desminado completo por al menos unas cuantas décadas.
Existen actualmente dos técnicas utilizadas en el país para realizar el desminado. En el
primero, de manera manual, donde el operario utiliza un detector de metales y una sonda
para registrar una zona potencialmente contaminada.
Si se llega a encontrar alguna mina, esta se deja descubierta para posteriormente ser
destruida o neutralizada (según estándares nacionales e internacionales). El segundo

7
método es mecánico, y se utilizan equipos dirigidos a control remoto para hacer el mismo
procedimiento mencionado. La asistencia canina es una herramienta adicional para ambos
métodos y resulta muy útil para la delimitación de perímetros de áreas peligrosas [6].
En el país todavía no se cuentan con muchos equipos para el segundo método, por lo que el
primero es el más utilizado hasta ahora.
Como se mencionó anteriormente, las zonas a descontaminar se encuentran en áreas
montañosas de difícil acceso con vehículos terrestres. Una aeronave STOL (short take off
and landing) reduce las distancias de despegue y aterrizaje a comparación de aeronaves
comunes. También pueden estar diseñados para pistas no convencionales (Tierra o pasto
largo). Esto se hace bastante llamativo para la aplicación propuesta, teniendo en cuenta que
la topografía Colombiana dificulta encontrar áreas extensas y con condiciones similares a
las de una pista de asfalto para el despegue/aterrizaje en las zonas potencialmente a
descontaminar.
Por todo lo anteriormente mencionado se hace necesario buscar una alternativa que pueda
facilitar a un equipo de trabajo a acceder de manera más fácil a zonas remotas para realizar
el desminado.
Se plantea un equipo de tres personas (en caso de que un integrante sufra un accidente los
otros dos pueden transportar el herido de vuelta a la aeronave), un perro que facilite la
detección de las minas y los instrumentos adicionales como el detector de metales y la
sonda.
4. MARCO TEORICO
4.1 Tipos de aeronaves V/STOL
Las aeronaves V/STOL son aquellas que tienen capacidades especiales en cuanto a que
pueden despegar y aterrizar verticalmente (VTOL) o en cortas distancias (STOL). Esto
se puede lograr al incrementar el ángulo de ataque de despegue, utilizar dispositivos de
hipersustentación en las alas, reducción de peso al máximo, tener una configuración que
permita tener una componente vertical de empuje, entre otros factores.
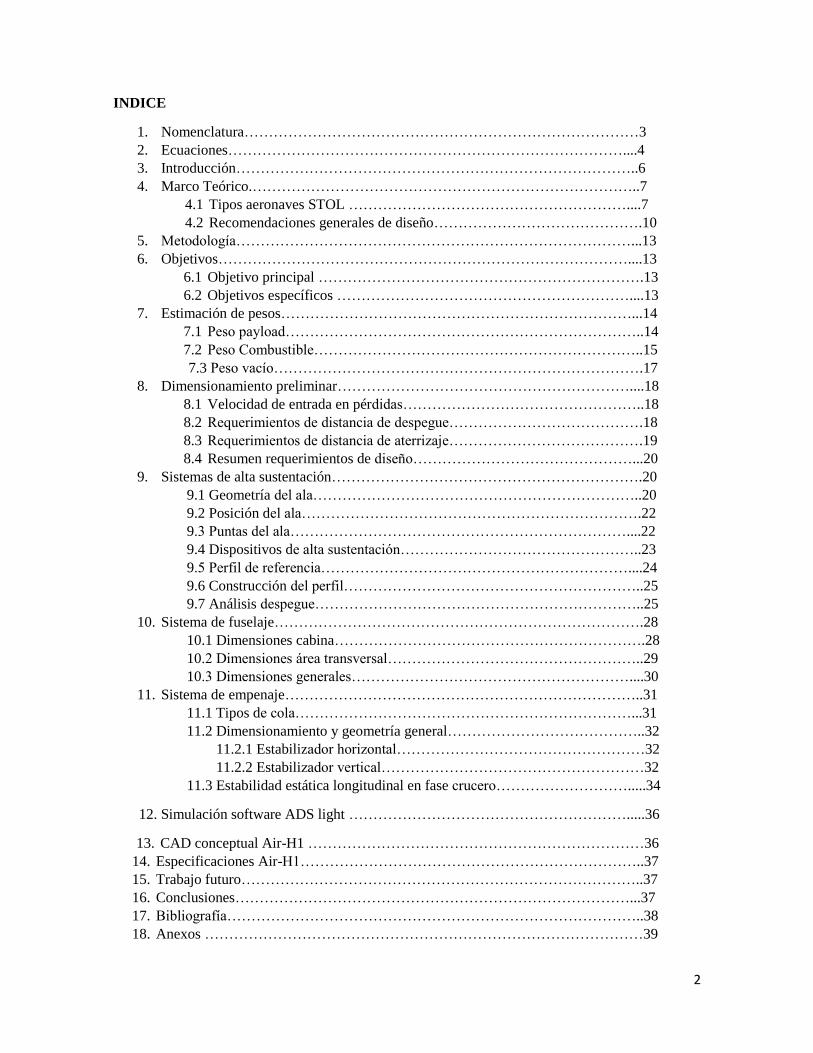
En la tabla 1 se puede ver una clasificación de diferentes tipos de aeronaves V/STOL
dependiendo del tipo de sistema de propulsión y generación de sustentación.
8
Tabla 1. Tipos de aeronave vs generadores de sustentación [7]
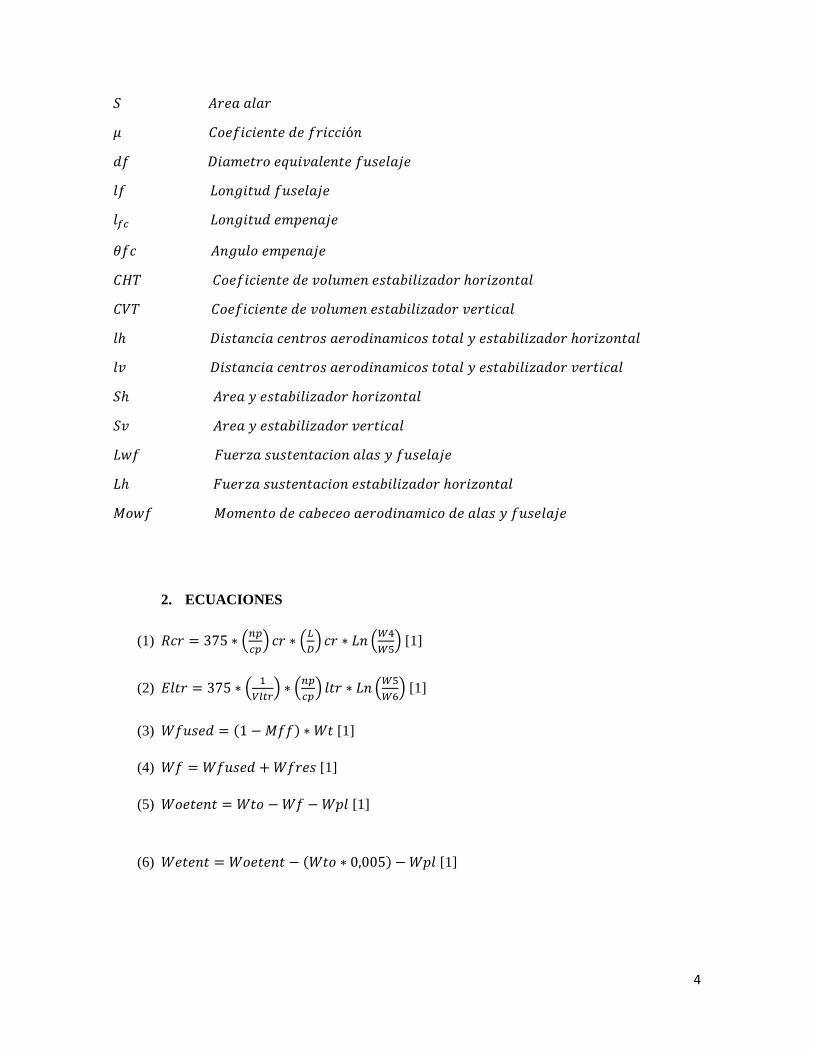
• Compuestas
Imagen 1. Aeronave compuesta [7]

9
Es una combinación de un helicóptero con alas fijas. En el vuelo hacia adelante la sustentación
está dada por las alas. El empuje frontal está dado por un propeller o jet como se ve en la parte
trasera de la imagen 1.
• Tail sitters
Son aeronaves impulsadas por jet o propellers que tienen suficiente empuje para permitirle
flotar con el eje horizontal moviéndose de manera vertical (VTOL)
• Tilt wing
En este tipo de aeronave se rotan las alas aproximadamente 90 grados con respecto a la cuerda
para incrementar a sustentación. Este diseño debe ir acompañado por propeller en la parte
superior.
Imagen 2. Aeronave tilt wing [7]
• Empuje rotativo (Jets, propeller y rotores)
El principio de funcionamiento de los tres tipos mencionados anteriormente es el mismo. El
empuje esta dado completamente por el elemento que rota. El fuselaje y alas se mantienen
horizontales. Los elementos que rotan pueden ser acoplados a las alas o al fuselaje mismo. En el
momento del despegue se busca una deflexión hacia abajo para producir una componente
vertical de empuje

10
Imagen 3. Aeronave turboprop [3]
4.2 Recomendaciones generales de diseño para aeronaves tipo STOL
1. Sistema de alta sustentación
Alas
Se debe buscar un alto coeficiente de sustentación con velocidades de despegue/aterrizaje
tan bajas como sea posible. Esto se logra con dispositivos de hipersustentación como los
flaps (en el borde de fuga) y slats (en el borde de ataque). Dependiendo del tipo de flaps y
slats estos pueden incrementar la combadura o la cuerda media. Este incremento se puede
apreciar en la figura 1.
Es importante tener un área alar significativa para generar alta sustentación, pero también se
debe tener en cuenta que elevar las dimensiones de la envergadura o cuerda podría
incrementar el peso a un punto donde ya no es beneficioso. Por esto se debe iterar las
dimensiones en el análisis de despegue para llegar a un buen balance área alar vs peso
aproximado.
Para la presente aplicación las alas de menor envergadura reducen la posibilidad de impacto
en terrenos con obstáculos como árboles.
Figura 1. Incremento coeficiente de sustentación con flaps y slats [8]
11
Es importante que el diseño incremente el coeficiente de sustentación en el despegue y
aterrizaje, y minimice el coeficiente de arrastre a velocidades de crucero. Los slats suelen
aumentar el arrastre a velocidades de crucero, así que se pueden utilizar sistemas mecánicos
donde se iguale la presión debajo y encima del ala en el borde de ataque para evitar
pérdidas. Los flaps desplegados fijos también incrementarían el arrastre en crucero por lo
que se hace necesario un sistema para retraerlos en esta etapa de vuelo.
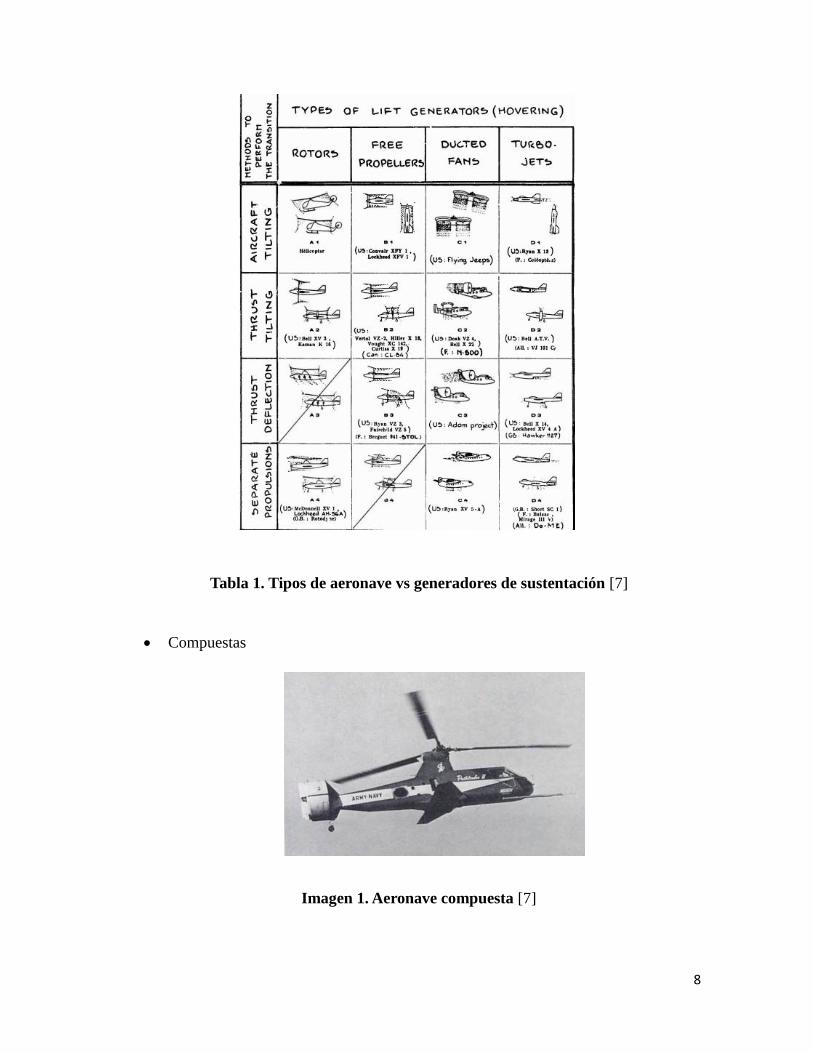
• Puntas de las alas
Los efectos del cambio de presión entre debajo y encima del ala se sienten menos hacia la
punta de esta, creando un segundo flujo que resulta en un vórtice. Curvando la punta del ala
hacia arriba o hacia abajo se centra el vórtice fuera del espacio de ala. Hay que tener como
consideración el peso adicional que esta curvatura brinda al ala. Además de esto, si se
recorta la parte inferior del ala con un ángulo de 45 grados con un filete suave, el vórtice no
entra a la parte superior del ala.
Imagen 4. Efecto Angulo de corte punta del ala [8]
2. Sistema del fuselaje
• STOL
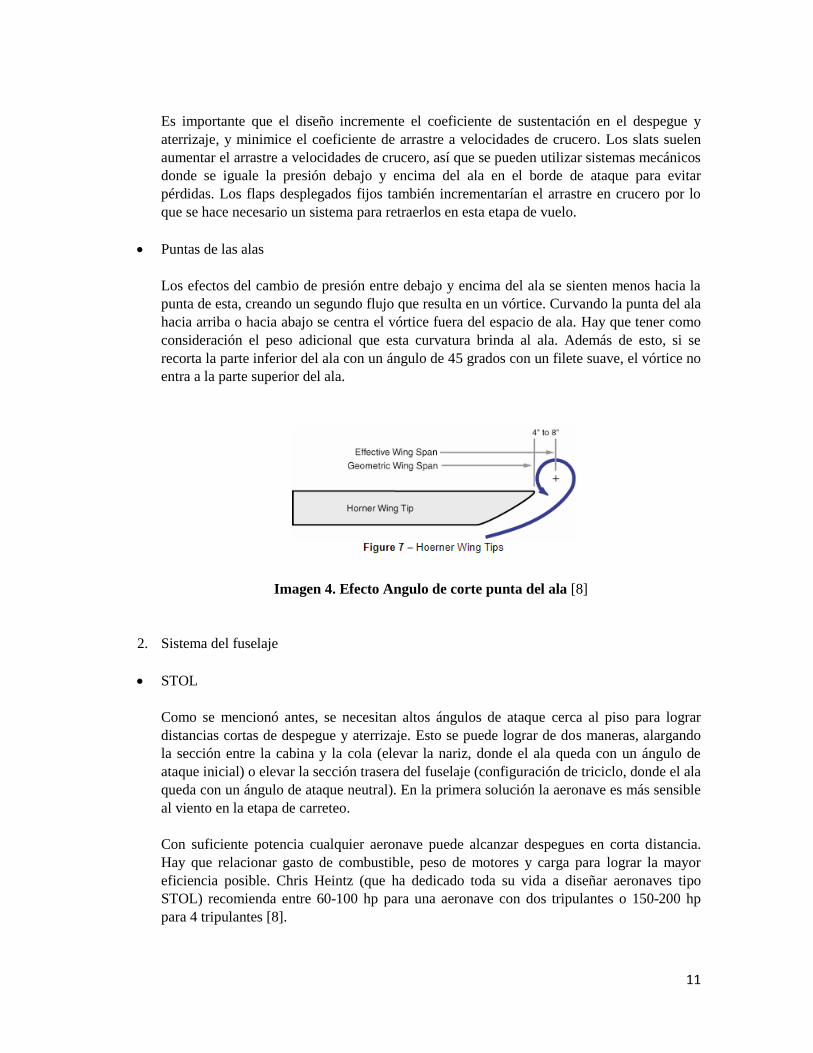
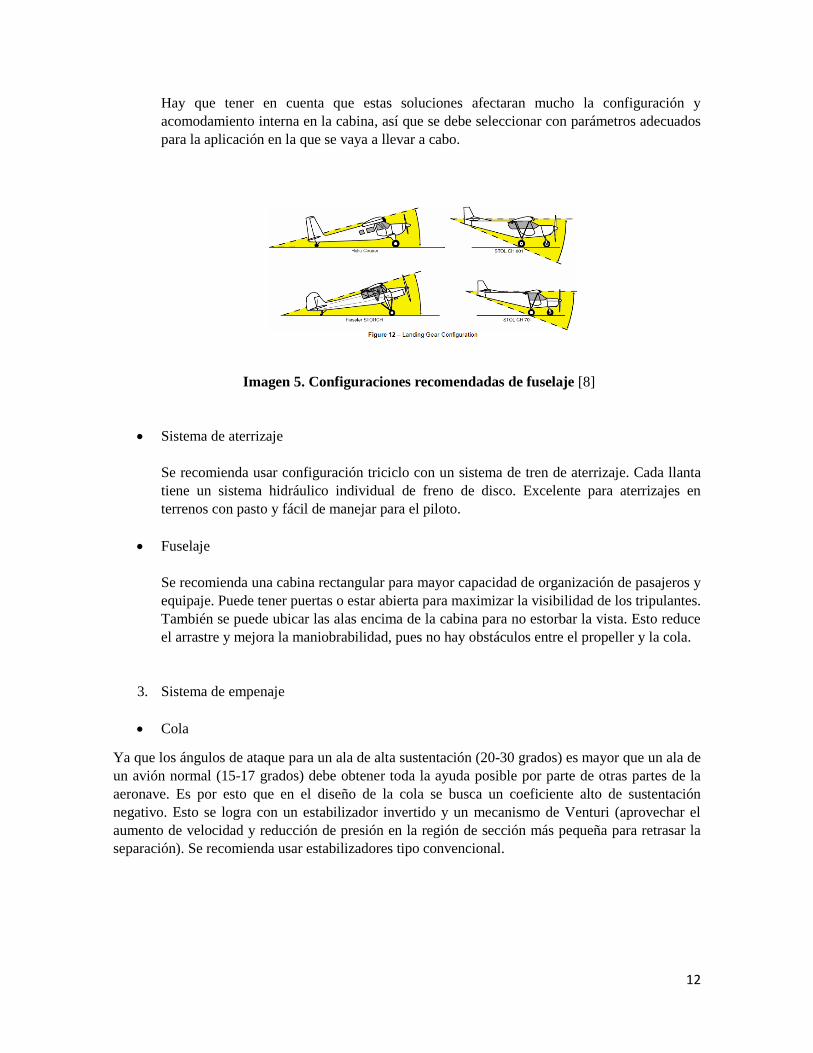
Como se mencionó antes, se necesitan altos ángulos de ataque cerca al piso para lograr
distancias cortas de despegue y aterrizaje. Esto se puede lograr de dos maneras, alargando
la sección entre la cabina y la cola (elevar la nariz, donde el ala queda con un ángulo de
ataque inicial) o elevar la sección trasera del fuselaje (configuración de triciclo, donde el ala
queda con un ángulo de ataque neutral). En la primera solución la aeronave es más sensible
al viento en la etapa de carreteo.
Con suficiente potencia cualquier aeronave puede alcanzar despegues en corta distancia.
Hay que relacionar gasto de combustible, peso de motores y carga para lograr la mayor
eficiencia posible. Chris Heintz (que ha dedicado toda su vida a diseñar aeronaves tipo
STOL) recomienda entre 60-100 hp para una aeronave con dos tripulantes o 150-200 hp
para 4 tripulantes [8].
12
Hay que tener en cuenta que estas soluciones afectaran mucho la configuración y
acomodamiento interna en la cabina, así que se debe seleccionar con parámetros adecuados
para la aplicación en la que se vaya a llevar a cabo.
Imagen 5. Configuraciones recomendadas de fuselaje [8]
• Sistema de aterrizaje
Se recomienda usar configuración triciclo con un sistema de tren de aterrizaje. Cada llanta
tiene un sistema hidráulico individual de freno de disco. Excelente para aterrizajes en
terrenos con pasto y fácil de manejar para el piloto.
• Fuselaje
Se recomienda una cabina rectangular para mayor capacidad de organización de pasajeros y
equipaje. Puede tener puertas o estar abierta para maximizar la visibilidad de los tripulantes.
También se puede ubicar las alas encima de la cabina para no estorbar la vista. Esto reduce
el arrastre y mejora la maniobrabilidad, pues no hay obstáculos entre el propeller y la cola.
3. Sistema de empenaje
• Cola
Ya que los ángulos de ataque para un ala de alta sustentación (20-30 grados) es mayor que un ala de
un avión normal (15-17 grados) debe obtener toda la ayuda posible por parte de otras partes de la
aeronave. Es por esto que en el diseño de la cola se busca un coeficiente alto de sustentación
negativo. Esto se logra con un estabilizador invertido y un mecanismo de Venturi (aprovechar el
aumento de velocidad y reducción de presión en la región de sección más pequeña para retrasar la
separación). Se recomienda usar estabilizadores tipo convencional.
13
5. METODOLOGÍA
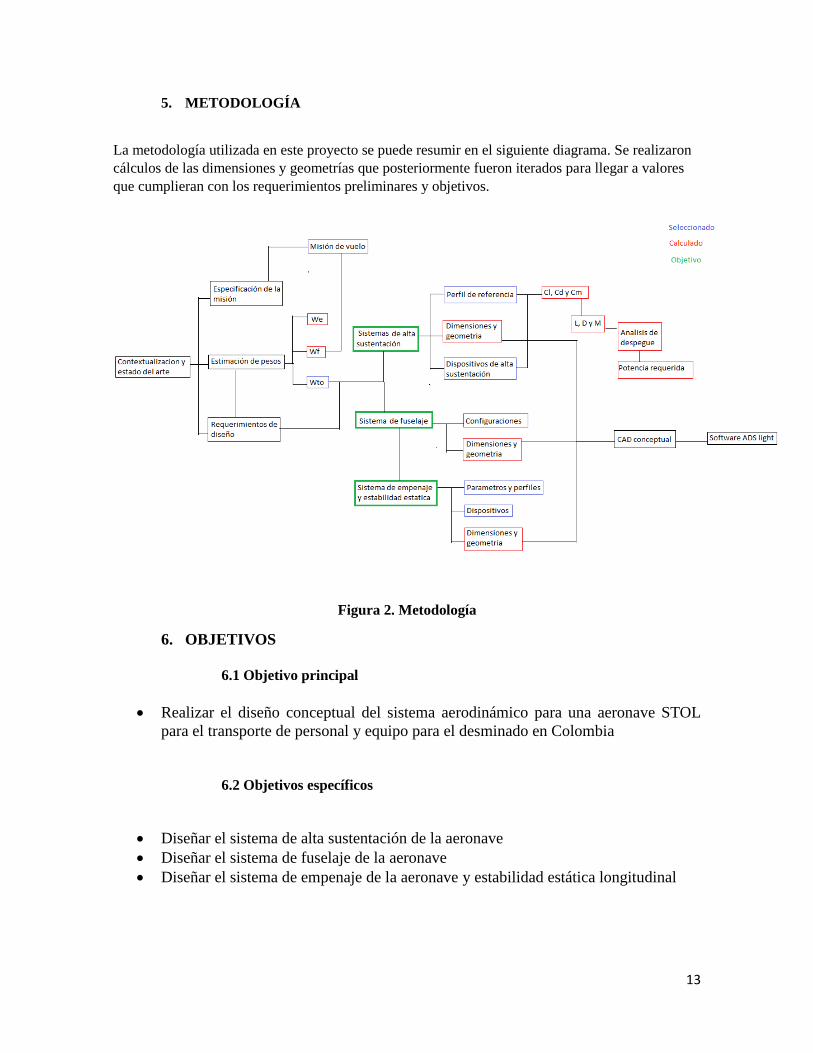
La metodología utilizada en este proyecto se puede resumir en el siguiente diagrama. Se realizaron
cálculos de las dimensiones y geometrías que posteriormente fueron iterados para llegar a valores
que cumplieran con los requerimientos preliminares y objetivos.
Figura 2. Metodología
6. OBJETIVOS
6.1 Objetivo principal
• Realizar el diseño conceptual del sistema aerodinámico para una aeronave STOL
para el transporte de personal y equipo para el desminado en Colombia
6.2 Objetivos específicos
• Diseñar el sistema de alta sustentación de la aeronave
• Diseñar el sistema de fuselaje de la aeronave
• Diseñar el sistema de empenaje de la aeronave y estabilidad estática longitudinal

14
7. ESTIMACION DE PESOS
Los componentes principales del peso total de la aeronave son el payload, el combustible y el peso
vacío. Para la estimación de los pesos se utilizó el método descrito por J. Roskam [1]. Se seleccionó
esta ya que esta es la utilizada en la mayoría de las referencias consultadas, además de su facilidad
de uso a partir de pocos parámetros conocidos. Inicialmente, se debe hacer una estimación del peso
total de despegue. Después de haber realizado una consulta bibliográfica de aeronaves similares, se
definió un peso de 1.3 toneladas.
7.1 Peso Payload
Este es el peso compuesto por los tripulantes y la carga. La siguiente tabla presenta los valores
utilizados.
Peso por tripulante (Kg) 80
Peso tripulantes (Kg) 240
Peso equipo (Kg) 11,5
Perro (Kg)
Demás equipo (Kg)
Payload (Kg)
33,5
15
300
Tabla 2. Pesos Payload.
Seguido a esto, se debe plantear un perfil de la misión, especificando las diferentes fases que la
conforman. La etapa de Loiter o sobrevuelo es aquella donde se hace el reconocimiento general de
un terreno para identificar la zona potencial de aterrizaje e inspección.
Figura 3. Perfil de la misión
15
7.2 Peso combustible
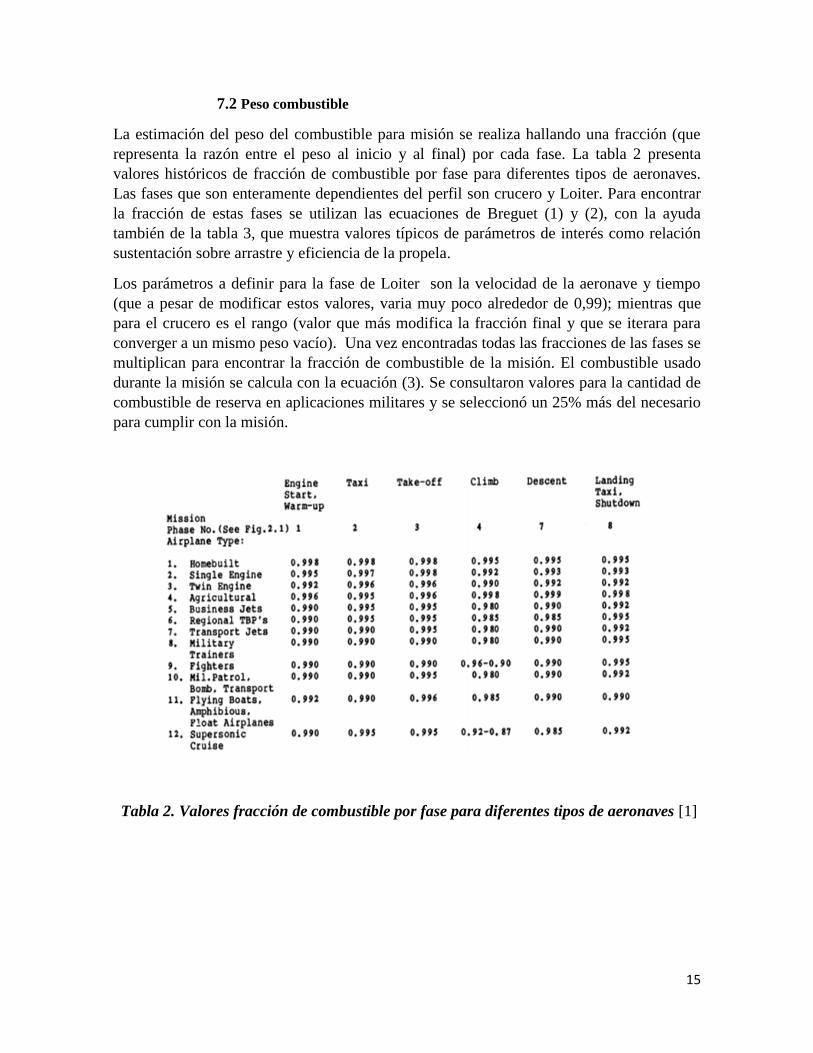
La estimación del peso del combustible para misión se realiza hallando una fracción (que
representa la razón entre el peso al inicio y al final) por cada fase. La tabla 2 presenta
valores históricos de fracción de combustible por fase para diferentes tipos de aeronaves.
Las fases que son enteramente dependientes del perfil son crucero y Loiter. Para encontrar
la fracción de estas fases se utilizan las ecuaciones de Breguet (1) y (2), con la ayuda
también de la tabla 3, que muestra valores típicos de parámetros de interés como relación
sustentación sobre arrastre y eficiencia de la propela.
Los parámetros a definir para la fase de Loiter son la velocidad de la aeronave y tiempo
(que a pesar de modificar estos valores, varia muy poco alrededor de 0,99); mientras que
para el crucero es el rango (valor que más modifica la fracción final y que se iterara para
converger a un mismo peso vacío). Una vez encontradas todas las fracciones de las fases se
multiplican para encontrar la fracción de combustible de la misión. El combustible usado
durante la misión se calcula con la ecuación (3). Se consultaron valores para la cantidad de
combustible de reserva en aplicaciones militares y se seleccionó un 25% más del necesario
para cumplir con la misión.
Tabla 2. Valores fracción de combustible por fase para diferentes tipos de aeronaves [1]

16
Tabla 3. Valores sugeridos para L/D, np, cp y cj, para fases de crucero y Loiter [1]
Inicio y calentamiento motor 0,995
Taxi 0,997
Despegue 0,998
Acenso a altitud y velocidad crucero
Crucero
Descenso Loiter
Loiter
Descenso final
Aterrizaje
Mff
Wfused (Kg)
Wf (Kg)
Woetent (Kg)
We (Kg)
𝑉𝐿𝑜𝑖𝑡𝑒𝑟 (mph)
𝑉𝑐𝑟𝑢𝑐𝑒𝑟𝑜 (mph)
𝑡𝑙𝑜𝑖𝑡𝑒𝑟 (min)
𝑅𝑎𝑛𝑔𝑜 (𝑚𝑖)
0,992
0,902
0,993
0,990
0,993
0,993
0,852
178,29
222,86
760
777,14
70
120
30
528
Tabla 4.Fracciones por fase y pesos combustible y parámetros crucero y Loiter.

17
7.3 Peso vacío
Si se observa la gráfica 1 se puede ver que, siguiendo la línea de tendencia, un peso total de
despegue de 1.3 toneladas corresponde aproximadamente a un peso vacío de 760 kg.
Utilizando las ecuaciones 3-6, se itera el rango total de la misión para que Wetent sea
cercano con We encontrado a partir de la gráfica 1. Esta diferencia finalmente queda de
17,14 Kg, lo cual es cercano.
Se encuentra un rango de 528 millas (sin la reserva), el cual es aceptable considerando que
solo se debería hacer una parada para tanquear para el recorrido máximo que tendría que
hacer la aeronave para la distancia entre los departamentos de Nariño y Norte de Santander
(800 millas aproximadamente).
Los valores finales con la iteración se encuentran en la tabla 4.
Grafica 1. Tendencias de peso vacío contra peso total aeronaves de una propela [1].

18
8. DIMENSIONAMIENTO PRELIMINAR
8.1 Velocidad de entrada en perdidas
Las velocidades de despegue y aterrizaje para aeronaves livianas de este estilo son
generalmente entre 40-60 mph. Esto también depende en gran medida de la habilidad del
piloto [8]. Asumiendo que este tendrá buena experiencia, y pensando en reducir lo máximo
las distancias de despegue y aterrizaje se eligió el límite superior de este rango. La
velocidad de entrada en pérdidas para aplicaciones militares es 1.2 veces menor a la
velocidad de despegue [1].
Utilizando la ecuación 7 se calcula la relación 𝑊
𝑆 para una densidad del aire a una altura de
1500 m, y un 𝐶𝐿𝑚𝑎𝑥 de 1.8, que se encuentra dentro del estado del arte según la tabla 5.
Este valor es de 19,27 lb/ft^2.
Tabla 5. Valores típicos para coeficiente de sustentación máximo [1]
8.2 Requerimientos de distancia de despegue
Teniendo en cuenta que las distancias de despegue en áreas rurales en Colombia no son muy
extensas, se buscaron unas adecuadas que concordaran con otras aeronaves STOL similares. Se
llegó a la distancia total de 132,8 m, que por normativa FAC 23 son suficientes para elevarse del
suelo y superar un obstáculo de 50 ft.
Figura 4. Distancias de despegue FAR 23 [1]
19
Para calcular la distancia en tierra se utiliza la ecuación (8). Los resultados se pueden ver en la tabla
6.
𝑆𝑇𝑂 (m) 80
𝑆𝑇𝑂 (m) 132,8
Tabla 6. Distancias de despegue FAR23
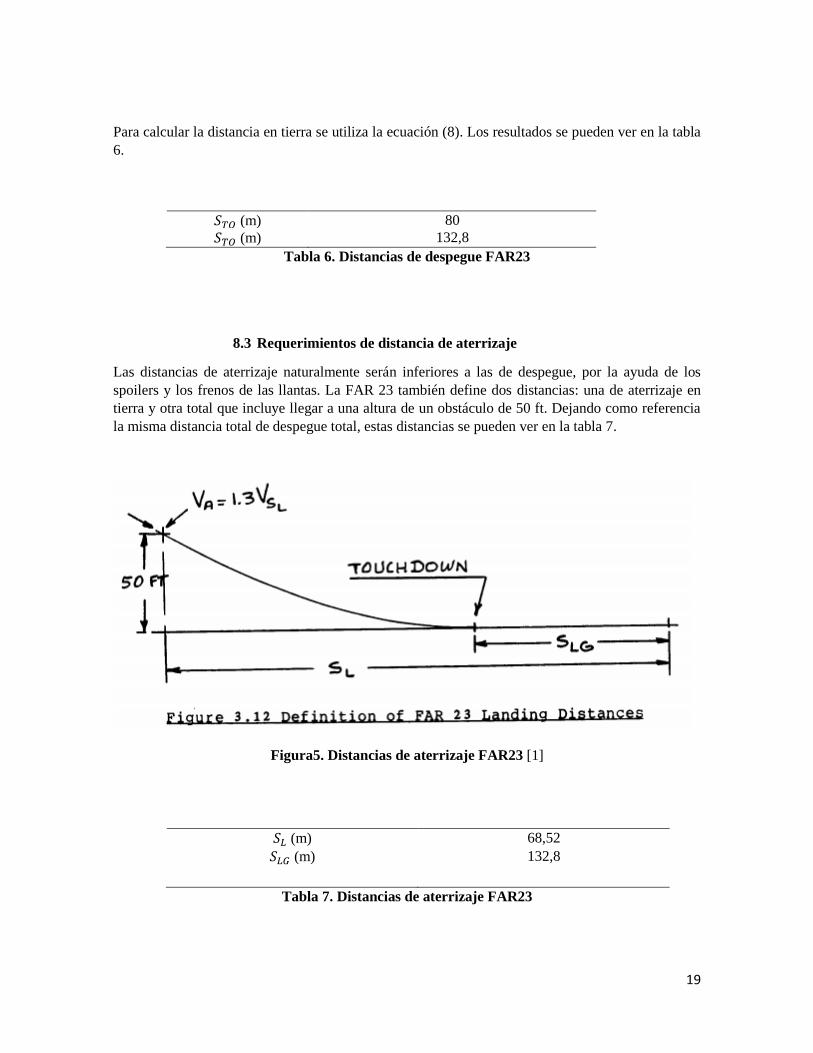
8.3 Requerimientos de distancia de aterrizaje
Las distancias de aterrizaje naturalmente serán inferiores a las de despegue, por la ayuda de los
spoilers y los frenos de las llantas. La FAR 23 también define dos distancias: una de aterrizaje en
tierra y otra total que incluye llegar a una altura de un obstáculo de 50 ft. Dejando como referencia
la misma distancia total de despegue total, estas distancias se pueden ver en la tabla 7.
Figura5. Distancias de aterrizaje FAR23 [1]
𝑆𝐿 (m) 68,52
𝑆𝐿𝐺 (m) 132,8
Tabla 7. Distancias de aterrizaje FAR23

20
8.4 Resumen requerimientos de diseño
En la tabla 8 se ven resumidos los demás requerimientos recopilados
𝑉𝑇𝑂 (mph) 60
𝑉𝐿𝐴𝑁 (mph)
𝑉𝑠 (mph)
𝑉𝐶𝑟𝑢𝑐𝑒𝑟𝑜(mph)
Potencia (HP)
Payload (Kg)
Wto (Ton)
Cabina presurizada
Configuración fuselaje
60
50
120
180-250
300
1.3
No
Triciclo
Tabla 8. Recopilación demás requerimientos de diseño
9. SISTEMAS DE ALTA SUSTENTACION
9.1 Geometría del ala
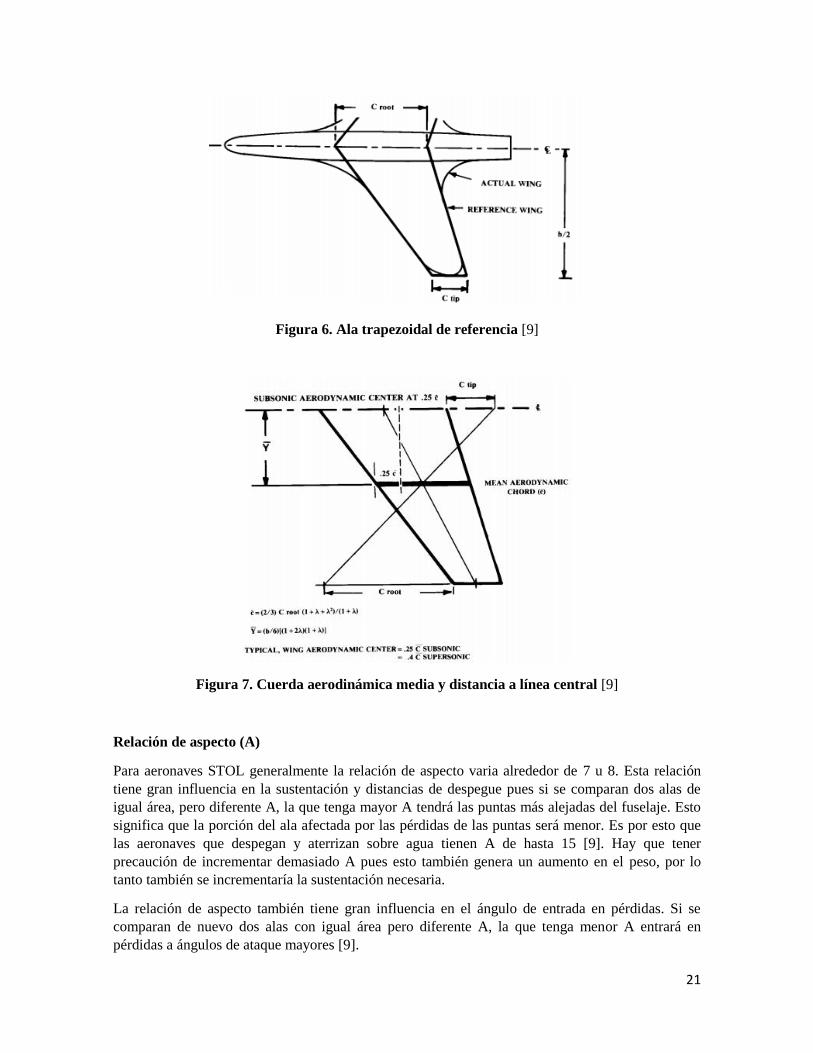
Para comenzar el diseño se inicia con un ala trapezoidal como la que se muestra en la figura 6. Es
importante mencionar que esta referencia es ficticia, pues el ala se extiende a través del fuselaje
hasta su línea central. La cuerda en la raíz se tiene en cuenta a esta línea central, y no en el
verdadero punto de conexión con el fuselaje.
Algunos parámetros geométricos importantes para definir son los ángulos de flecha, diedro y twist.
Ya que la velocidad máxima de operación va a estar alrededor de 0.18 Mach, no hay que
preocuparse por formación de choques ni efectos de compresibilidad, así que el ángulo de flecha
puede ser 0. El ángulo de diedro esta muy relacionado con el ángulo de flecha y los efectos que
tiene sobre el momento de balanceo, así que este también será 0.
El twist se utiliza para reducir las perdidas por vórtices en las puntas de las alas. Este varia
generalmente entre 0-5 grados. Ya que se tendrá en cuenta una configuración especial para las
puntas de las alas, tampoco se utilizará ningún twist. La figura 7 contiene otros parámetros básicos
importantes a especificar, como la cuerda aerodinámica media y la envergadura [9].
Teniendo en cuenta lo anterior (especialmente la baja velocidad de operación, y que no hay
requerimientos demasiado estrictos en cuanto a maniobrabilidad) y comparando con aeronaves
similares se decidió que las alas serian rectangulares de cuerda constante. Esto también enfocado en
reducir costos de manufactura.
21
Figura 6. Ala trapezoidal de referencia [9]
Figura 7. Cuerda aerodinámica media y distancia a línea central [9]
Relación de aspecto (A)
Para aeronaves STOL generalmente la relación de aspecto varia alrededor de 7 u 8. Esta relación
tiene gran influencia en la sustentación y distancias de despegue pues si se comparan dos alas de
igual área, pero diferente A, la que tenga mayor A tendrá las puntas más alejadas del fuselaje. Esto
significa que la porción del ala afectada por las pérdidas de las puntas será menor. Es por esto que
las aeronaves que despegan y aterrizan sobre agua tienen A de hasta 15 [9]. Hay que tener
precaución de incrementar demasiado A pues esto también genera un aumento en el peso, por lo
tanto también se incrementaría la sustentación necesaria.
La relación de aspecto también tiene gran influencia en el ángulo de entrada en pérdidas. Si se
comparan de nuevo dos alas con igual área pero diferente A, la que tenga menor A entrará en
pérdidas a ángulos de ataque mayores [9].
22
9.2 Posición del Ala
El posicionamiento vertical del ala en el fuselaje depende en mayor medida del ambiente de
operación de la aeronave. Existen varias ventajas de ubicarlas en una posición alta. El fuselaje
puede estar más cerca al suelo, lo cual se vuelve una ventaja para la carga y descarga. Esto es de
gran utilidad en este proyecto pues es de vital importancia que sea lo más fácil posible para un
tripulante ubicar a su compañero dentro de la aeronave, en caso de que haya sufrido algún accidente
el en proceso de desminado. Además de esto, la posición alta da mayor espacio para flaps más
grandes [9].
Otra gran ventaja es que las alas están menos expuestas a posibles impactos contra el suelo u
objetos sobre él, si hay momentos que desestabilizan la nave y provocan que rotación durante el
aterrizaje.
Desde el punto de vista estructural, es más conveniente que alas que atraviesan el fuselaje, pues en
este último caso se debe reforzar el área que penetran (lo cual conlleva a un incremento de peso).
Para la posición alta se “recuesta” sobre el fuselaje, y se refuerza con hombros.
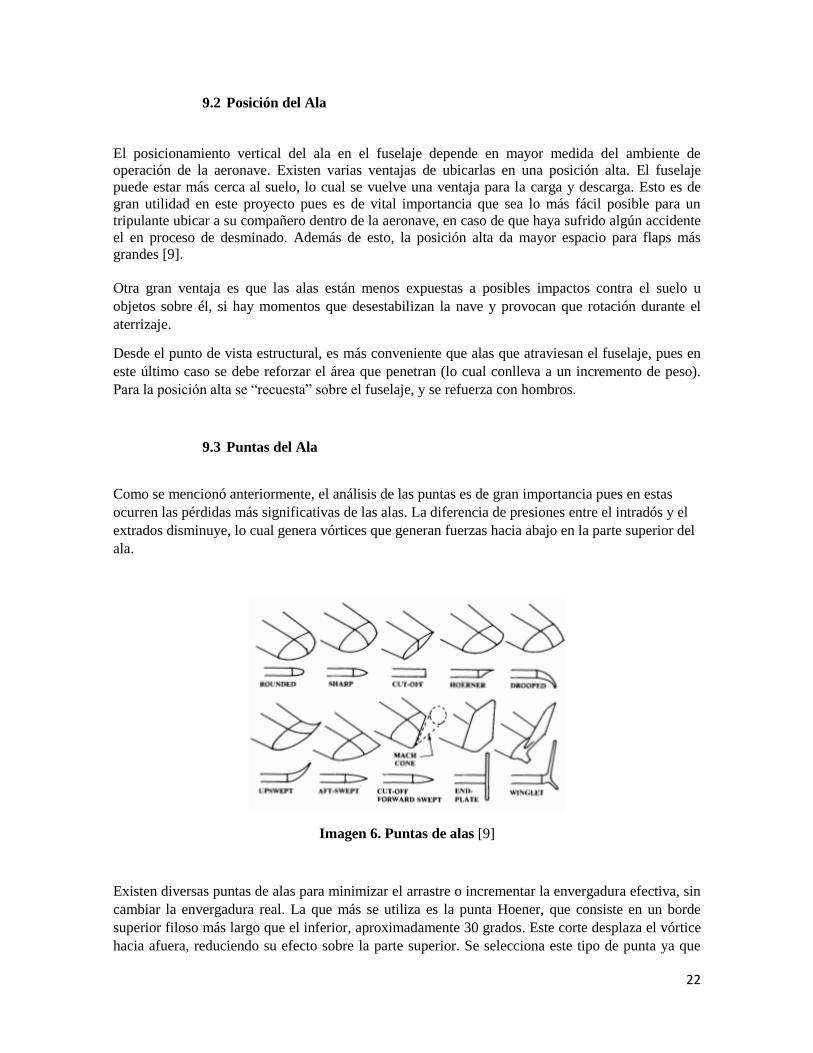
9.3 Puntas del Ala
Como se mencionó anteriormente, el análisis de las puntas es de gran importancia pues en estas
ocurren las pérdidas más significativas de las alas. La diferencia de presiones entre el intradós y el
extrados disminuye, lo cual genera vórtices que generan fuerzas hacia abajo en la parte superior del
ala.
Imagen 6. Puntas de alas [9]
Existen diversas puntas de alas para minimizar el arrastre o incrementar la envergadura efectiva, sin
cambiar la envergadura real. La que más se utiliza es la punta Hoener, que consiste en un borde
superior filoso más largo que el inferior, aproximadamente 30 grados. Este corte desplaza el vórtice
hacia afuera, reduciendo su efecto sobre la parte superior. Se selecciona este tipo de punta ya que

23
reduce la masa (en pequeña medida) a diferencia de otras que pueden ser mas efectivas, pero
aumentan la masa.
9.4 Dispositivos de alta sustentación
La selección de los dispositivos de alta sustentación debería ir acorde con mantener una buena
eficiencia. Para las etapas de despegue y aterrizaje, las alas deben tener elevada sustentación (alta
combadura y baja carga alar), mientras que en crucero se busca disminuir lo más que se pueda el
arrastre (baja combadura y poder operar a altas cargas alares).
En la figura 8 se muestran diferentes tipos de dispositivos para el borde de fuga del ala. Los flaps
planos y Split son casi iguales, aumentando la sustentación dándole una mayor combadura, con la
diferencia que en el segundo solo la parte inferior se gira (genera mayor arrastre y menos momento
de cabeceo, deseado en aplicaciones específicas). Los flaps más complejos incluyen un slot y
mecanismos con superficies adicionales que aumentan la combadura y área. Estos últimos producen
un incremento mayor a la sustentación, pero con la desventaja que son más complejos, caros y
pesados.
Figura 8. Tipos de flaps [9]
Los flaps por si solos no incrementan el ángulo de entrada en pérdidas. Para conseguir esto es
necesario adicionar un dispositivo en el borde de ataque ala. Los slots son esencialmente orificios
que permiten el paso de aire de alta presión en la parte inferior hacia la parte superior, retrasando la
separación y la entrada en pérdidas. Estos pueden ser fijos o con mecanismos para cerrarlos, para
disminuir el arrastre a altas velocidades. Un flap en el borde de ataque combinado con un slot es
conocido como slat.
24
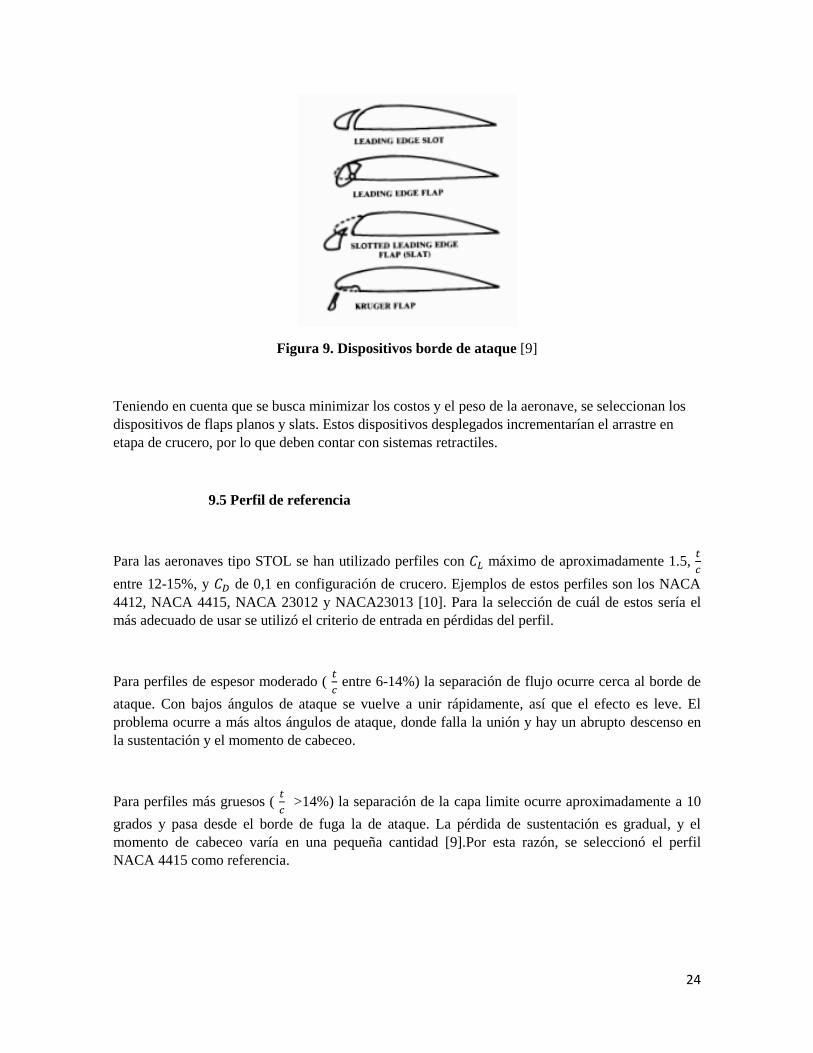
Figura 9. Dispositivos borde de ataque [9]
Teniendo en cuenta que se busca minimizar los costos y el peso de la aeronave, se seleccionan los
dispositivos de flaps planos y slats. Estos dispositivos desplegados incrementarían el arrastre en
etapa de crucero, por lo que deben contar con sistemas retractiles.
9.5 Perfil de referencia
Para las aeronaves tipo STOL se han utilizado perfiles con 𝐶𝐿 máximo de aproximadamente 1.5, 𝑡
𝑐
entre 12-15%, y 𝐶𝐷 de 0,1 en configuración de crucero. Ejemplos de estos perfiles son los NACA
4412, NACA 4415, NACA 23012 y NACA23013 [10]. Para la selección de cuál de estos sería el
más adecuado de usar se utilizó el criterio de entrada en pérdidas del perfil.
Para perfiles de espesor moderado ( 𝑡
𝑐 entre 6-14%) la separación de flujo ocurre cerca al borde de
ataque. Con bajos ángulos de ataque se vuelve a unir rápidamente, así que el efecto es leve. El
problema ocurre a más altos ángulos de ataque, donde falla la unión y hay un abrupto descenso en
la sustentación y el momento de cabeceo.
Para perfiles más gruesos ( 𝑡
𝑐 >14%) la separación de la capa limite ocurre aproximadamente a 10
grados y pasa desde el borde de fuga la de ataque. La pérdida de sustentación es gradual, y el
momento de cabeceo varía en una pequeña cantidad [9].Por esta razón, se seleccionó el perfil
NACA 4415 como referencia.

25
9.6 Construcción del perfil
Se utiliza el método descrito en el libro Theory of wing sections including a summary of airfoil data
[11]. En este se explican las ecuaciones para obtener las curvas del intradós, extrados y la CAM.
Para esto se utiliza la cuerda, el espesor máximo y la combadura máxima y su posición. Se utiliza
una aproximación porcentual para la ubicación de todos los puntos que conforman las rectas. En la
gráfica #2 se puede ver el perfil finalizado.
Grafica 2. Perfil NACA 4415
b/2 (m) 5
λ 1
Croot (m) 1,35
CAM (m)
�̅� (m)
A
S (m^2)
Cam (m)
Incidencia (°)
Area flaps y alerones (m^2)
1,35
2,5
7,4
13,5
1,35
2
2,88
Tabla 9. Parámetros geométricos de las alas.
9.7 Análisis despegue
Para asegurar que la aeronave va a elevarse se debe revisar que la fuerza de sustentación es al
menos igual al peso total de despegue. Para esto en primera medida se utiliza la ecuación (11), para
conocer (con los parámetros seleccionados) el 𝐶𝐿 necesario.
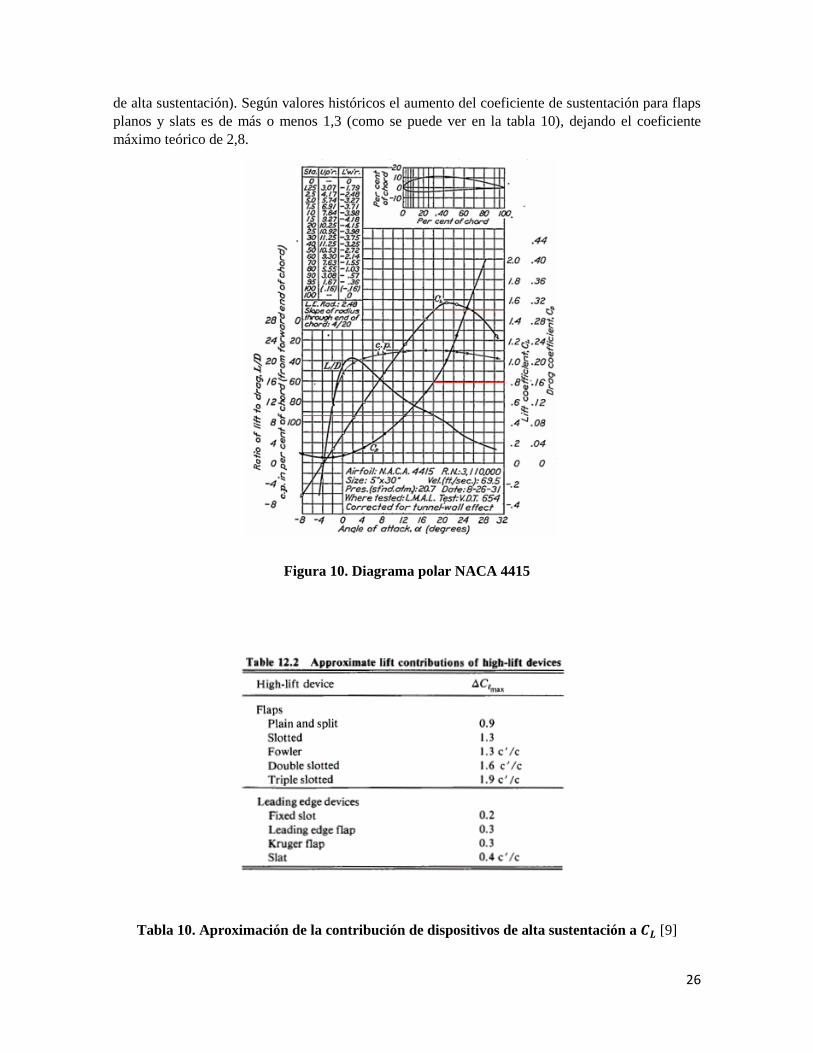
También es necesario definir el ángulo de ataque α para el despegue, pues es el parámetro de
entrada para el diagrama polar del perfil NACA 4415. Teniendo en cuenta que para este perfil el
ángulo de entrada en pérdidas es alrededor de 20-21 grados, se seleccionó α=18 grados. Según el
diagrama polar de la figura 10 el 𝐶𝐿 a este ángulo es de 1,5 para el perfil solo, sin los dispositivos
26
de alta sustentación). Según valores históricos el aumento del coeficiente de sustentación para flaps
planos y slats es de más o menos 1,3 (como se puede ver en la tabla 10), dejando el coeficiente
máximo teórico de 2,8.
Figura 10. Diagrama polar NACA 4415
Tabla 10. Aproximación de la contribución de dispositivos de alta sustentación a 𝑪𝑳 [9]

27
La tabla 11 presenta los coeficientes de sustentación requeridos a diferentes alturas. Por encima de
2500 m el coeficiente es mayor que el máximo teórico encontrado. Ya que este incremento depende
en gran medida del área de los dispositivos, se utilizara el software ADS light para verificar estos
valores.
Alturas
(m)
Rho
(kg/m^3) 𝐶𝐿 (-)
0 1,225 2,143
500 1,13 2,324
1000 1,053 2,494
1500 1 2,626
2000 0,941 2,791
2500 0,885 2,967
3000 0,829 3,168
Tabla 11. Coeficientes e sustentación requeridos a diferentes alturas
Utilizando las ecuaciones 11, 12, 13 y el diagrama polar del perfil NACA 4415 se pueden calcular
las fuerzas de sustentación y arrastre, y el momento de cabeceo a diferentes alturas. Para calcular el
empuje necesario por el sistema de propulsión se utilizó la ecuación 14 resultado del diagrama de
cuerpo libre. Se asumió un tiempo de despegue de 12s, lo cual es típico en aeronaves similares
(como el Zenith 801) [10]. Con la velocidad de despegue se calculó finalmente la potencia
requerida por el motor. Estos resultados se pueden ver en la tabla 12.
Alturas
(m) ρ
(kg/m^3) L(N) D(N) M(Nm) Femp (N) Potencia
(HP) 0 1,225 16656,86 951,82 -722,79 5397,04 194,13
500 1,13 15365,10 878,01 -666,74 5323,23 191,47 1000 1,053 14318,10 818,17 -621,30 5263,39 189,32 1500 1 13597,43 776,99 -590,03 5222,21 187,83 2000 0,941 12795,18 731,15 -555,22 5176,37 186,19 2500 0,885 12033,73 687,64 -522,18 5132,86 184,62
Tabla12. Fuerzas y momentos aerodinámicos a diferentes alturas de despegue solo alas
Ya que la tabla anterior solo contemplaba el arrastre generado por las alas, es importante agregar la
otra gran fuente generadora que es el fuselaje. Una simplificación que da como resultado una buena
aproximación utilizada para las primeras etapas de diseño es asumir el doble de arrastre. Los
resultados contemplando el arrastre de las alas y fuselaje se pueden ver en la tabla 13.
28
Alturas (m) D(N) Femp (N) Potencia (HP) 0 1903,64 6348,86 228,36
500 1756,01 6201,23 223,05 1000 1636,35 6081,57 218,75 1500 1553,99 5999,21 215,79 2000 1462,31 5907,53 212,49 2500 1375,28 5820,50 209,36
Tabla13. Fuerzas y momentos aerodinámicos a diferentes alturas de despegue alas y fuselaje
10. SISTEMA DE FUSELAJE
10.1 Dimensiones cabina
Ya que el fuselaje es el componente de mayor tamaño es de vital importancia minimizar el área
perpendicular al flujo frontal del mismo para disminuir el arrastre y por tanto consumo de
combustible. Esto se debe hacer sin perjudicar la comodidad de los pasajeros y el espacio necesario
para el equipo de desminado.
Para un diseño acorde a este caso específico sería ideal tener una muestra significativa de medidas
antropométricas (hombro-muñeca, hombro-cintura, cintura-rodilla, rodilla-talón, etc.). Ya que este
tipo de estudios no se realiza en Colombia desde la década de los noventas, se utilizó el siguiente
esquema estandarizado tomado de J. Roskam [2].
Ya que se busca reducir los costos de manufactura lo máximo posible, se utilizará un área
transversal cuadrada y se trabajará con el diámetro equivalente. Las medidas se muestran en las
figuras 11 y 12.
Figura 11. Dimensiones cabina [2]
29
10.2 Dimensiones área transversal
Figura 12. Dimensiones área transversal [2]
Una vez definido el peso total de la aeronave, y basados en históricos se puede calcular la longitud
total con la ecuación 15 y la tabla 15. Con esto se pueden determinar otros factores dimensionales
como longitud total sobre diámetro y longitud empenaje sobre diámetro, que se encuentran dentro
de los rangos históricos. Es importante resaltar que el valor de la relación lf/df que minimiza el
arrastre es de 6, por lo que el valor para esta aeronave es muy bueno [12].
Tabla 15. Constantes para hallar longitud fuselaje [2]

30
Tabla 16. Históricos de dimensiones de fuselaje por tipo de aeronave [2]
El ángulo del empenaje no se encuentra dentro de los rangos históricos para aeronaves de un motor,
pues estos son bajos. El problema con esto es que el ángulo de ataque final seleccionado para las
alas que brinda el suficiente coeficiente de sustentación para vencer el peso y elevarse es de 18
grados, por lo que el empenaje golpearía el suelo antes que el avión se elevara.
En el rango histórico de transporte y patrullas militares (clasificación que también aplicaría para
este proyecto) si entraría este ángulo. Se selecciona un ángulo de 20° para tener una diferencia de 4°
(contando el ángulo de incidencia de las alas).
10.3 Dimensiones generales
Los valores finales de estos parámetros dimensionales se pueden ver en la tabla 14.
𝑑𝑓 (m) 1,35
𝑙𝑓 (m) 8,31
𝑙𝑓/ 𝑑𝑓 (-) 6,15
𝑙𝑓𝑐 𝑚𝑖𝑛(m)
𝑙𝑓𝑐 𝑚𝑎𝑥(m)
𝑙𝑓𝑐 (-)
𝜃𝑓𝑐 (°)
3,375
8
3,709
20
Tabla 14. Dimensiones generales fuselaje.

31
Figura 13. Dimensiones generales fuselaje [2]
11. SISTEMA DE EMPENAJE
La función principal del sistema de empenaje es brindar estabilidad y control a la aeronave. Se
compone de estabilizador horizontal y vertical, cada una con dispositivos adicionales.
11.1 Tipo de cola
Figura 14. Tipos de cola [9]
En la figura 14 se pueden ver diferentes tipos de cola. Aproximadamente el 70% de las aeronaves
tienen la cola convencional. Esta cumple con los requerimientos generales de estabilidad y control
necesarios, con un peso ligero. Otro tipo bastante utilizado es la cola tipo T, que comparada con la
convencional permite una reducción de envergadura de la cola vertical. La cola vertical sostiene la
horizontal, así que esta debe ser más robusta, por lo que hay un aumento substancial en el peso.
32
Se selecciona para el diseño la cola convencional, ya que con la tipo T habría que analizar la
posición de la aeronave durante el ascenso y confirmar que el estabilizador horizontal no quedara en
la estela de las alas, pues esto reduciría la sustentación generada y causaría desestabilidad. Con la
cola convencional no hay que preocuparse por esto.
11.2 Dimensionamiento y geometría general
11.2.1 Estabilizador horizontal
La función principal del estabilizador horizontal es balancear el momento creado por las alas
(momento de cabeceo). Típicamente tiene un ángulo negativo de incidencia de 2-3 grados para
balancear el momento de cabeceo (con un rango de variación de 3 grados para diferentes fases de
vuelo). Ya que el centro de gravedad de la aeronave varia con respecto al eje x mediante avanza la
misión de vuelo (por consumo del combustible), los estabilizadores horizontales cuentan con
elevadores para tener control y estabilidad longitudinal [3].
Por facilidad de sistemas y reducción de pesos se utiliza un estabilizador horizontal rectangular, de
ángulo de diedro y flecha de cero grados, y de paso fijo. Aunque el estabilizador de paso variable
permite un rango mayor de ángulos, este involucra un sistema con más actuadores (mayor peso),
además de que si el sistema llegase a fallar representaría peligro inminente por perdida de
estabilización y control longitudinal.
Se iteraron relaciones de aspecto dentro del estado del arte (tabla 15) para encontrar cuerdas en la
raíz y en las puntas dimensionalmente congruentes para ambos estabilizadores.
El procedimiento de dimensionamiento se explica en la siguiente sección.
11.2.2 Estabilizador VERTICAL
El estabilizador vertical es el encargado de la dirección (momento de guiada) de la aeronave. Esta
direccionalidad es llevada a cabo con el rudder, dispositivo presente en el borde de fuga.
Para el estabilizador vertical es necesario tener en cuenta que la aeronave propuesta es de un motor,
por lo que hay un momento unidireccional causado por la rotación de la propela. Es necesario
entonces generar un momento que permita un balanceo.
Se seleccionó una relación de taperado de 0,45 (que entra en los rangos históricos según la tabla 15)
ya que esta asemeja un ala elíptica, la cual es la más eficiente de todas [9].
Geometría de la cola
Para hallar las áreas de los estabilizadores verticales y horizontales se utiliza el método propuesto
por Anderson [3]. Se utilizan los coeficientes de volumen basados en históricos de la tabla 17 para

33
calcular el área de cada estabilizador y las ecuaciones 16 y 17. Es importante también encontrar la
distancia entre el centro aerodinámico medio y el centro aerodinámico total del avión. Esta distancia
se puede encontrar a través de la ecuación 18.
Tabla 15. Rangos históricos relación de aspecto y taperado [9]
Tabla 16. Relación l/L Histórica para diferentes tipos de aeronaves [4]
Tabla 17. Coeficientes de volumen estabilizadores [4]
Los valores finales se pueden ver en las tablas 18 y 19.

34
A 3,5
λ 1
Croot (m) 1
Ctip (m)
S (m^2)
A elevador (m^2)
Perfil referencia
Lh (m)
1
3,508
0,702
NACA0009
4,16
Tabla 18. Dimensiones y geometría estabilizador horizontal
A 1,5
λ 0,45
Croot (m) 1,267
Ctip (m)
Cam (m)
S (m^2)
A rudder (m^2)
Perfil de referencia
Lv (m)
0,570
0,962
1,251
0,702
0,35
NACA0009
4,36
Tabla 19.Dimensiones y geometría estabilizador vertical
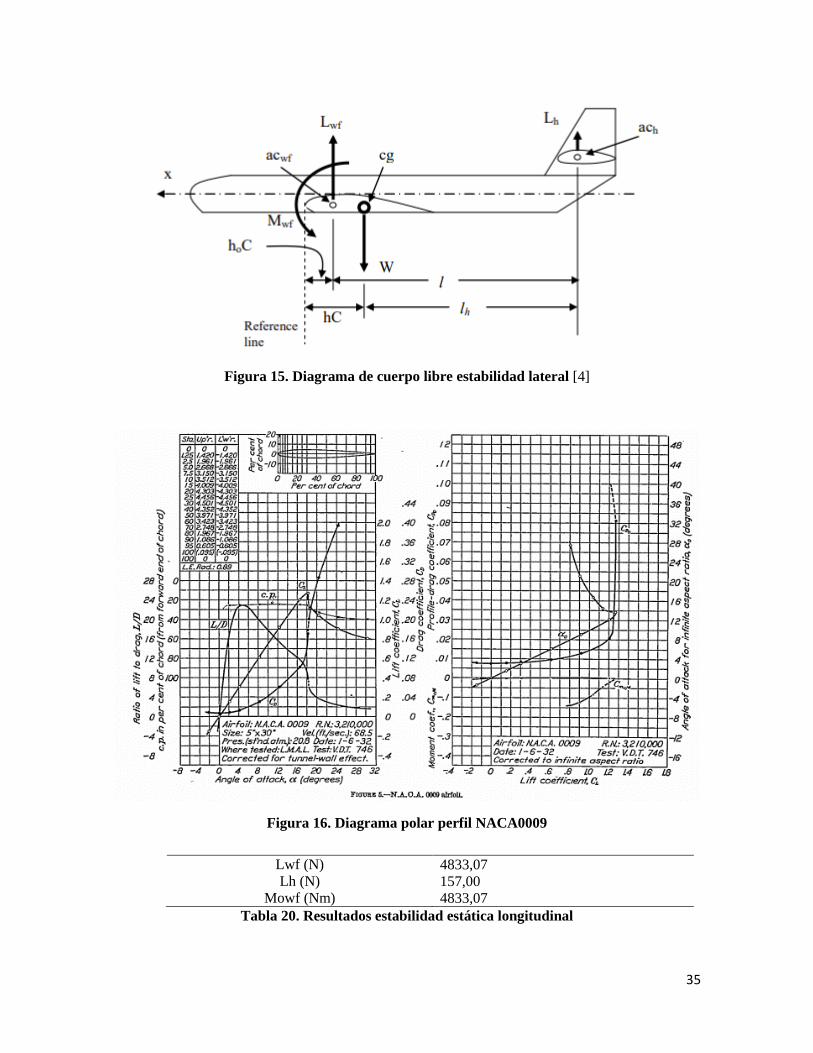
11.3 Estabilidad estática longitudinal en fase crucero
Es la condición en la que hay equilibrio de fuerzas en el eje x, en cuanto a momentos de cabeceo.
En la siguiente figura se presenta el diagrama de cuerpo libre en el que se da esta condición. Se
simplifican otros momentos alrededor del centro de masa como lo son el empuje del motor y
arrastre del tren de aterrizaje (ya que este es fijo). La sustentación de la cola horizontal debe
balancear los momentos generados por la sustentación del ala Lwf y el momento de cabeceo
aerodinámico del ala-fuselaje Mowf (esto asumiendo también que el empuje generado por el motor
se encuentra en la misma línea horizontal que el centro de masa).
Se utilizan los diagramas polares para encontrar los coeficientes de sustentación (utilizando la
figura 16 y las ecuaciones 19-21).
Finalmente se llega a las fuerzas y momentos de la tabla 20, que se deben cumplir para cumplir la
estabilidad estática longitudinal. Esta tiene en cuenta las áreas de las alas y estabilizador horizontal.
35
Figura 15. Diagrama de cuerpo libre estabilidad lateral [4]
Figura 16. Diagrama polar perfil NACA0009
Lwf (N) 4833,07 Lh (N) 157,00
Mowf (Nm) 4833,07
Tabla 20. Resultados estabilidad estática longitudinal

36
12 SIMULACIÓN SOFTWARE ADS LIGHT
Como fue mencionado anteriormente, era necesario buscar una alternativa que respaldara los
cálculos basados en ecuaciones encontradas en la bibliografía. Puntualmente hablando, los
incrementos teóricos al coeficiente de sustentación por los dispositivos de alta sustentación.
El software ADS light permite hacer simulaciones para obtener parámetros de interés en diferentes
fases de vuelo como ascenso, crucero y descenso. Se selecciona una aeronave de características
similares (en este caso, se seleccionó el Zenith 801) y se agregan como input parámetros
geométricos y pesos tentativos para correr la simulación.
En la imagen 7 se puede ver el resultado de la simulación de la parte de aerodinámica. Como se
puede ver, el máximo coeficiente de sustentación fue mayor al encontrado con los incrementos
teóricos por dispositivos en los bordes de fuga y ataque. Esto comprueba que la aeronave no tendrá
ningún problema para elevarse a ninguna de las alturas analizadas.
Imagen 7. Resultados aerodinámica software ADS light
13 CAD CONCEPTUAL AIR-H1
Imagen 8. CAD conceptual Air-H1.

37
14 ESPECIFICACIONES AIR-H1
Vto(mph Vlan(mph Vc(mph) Vs(mph W/S
(lb/ft^2)
Lf Altura Envergadura
(m)
60 60 120 50 19,27 8,31 3,78 10
We/Wto (Kg) Wto (Kg) Combustible
(Kg)
Rango (mi) Potencia (HP)
0,583 1300 222 (sin
reserve)
528 250
15 TRABAJO FUTURO
Los puntos principales a trabajar para complementar y alcanzar un diseño conceptual a un nivel
considerable para pasar a una etapa de diseño preliminar son:
• Sistema de propulsión: El alcance de este proyecto se limitó en el sistema de propulsión a
calcular cuál debería ser la potencia del sistema de propulsión para elevar la aeronave
satisfaciendo el requerimiento de distancia de despegue. Es necesario hacer el análisis
completo del motor turboprop y consultar en la industria motores con características
adecuadas. Esto con el fin de replantear o justificar las dimensiones y pesos propuestos.
• Tren de aterrizaje: Es necesario realizar el análisis completo del tren de aterrizaje más allá
de especificar si es fijo o replegable. Esto complementaria la estabilidad estática, los pesos
propuestos y tendría en cuenta el incremento de arrastre en las diferentes etapas de vuelo
• Viabilidad desactivación aérea: Seria interesante investigar la viabilidad de un sistema que
eliminara por completo el peligro de los tripulantes al realizar la labor de desminado. Esta
se haría sin aterrizar, descendiendo a una altura considerable donde sea posible la
desactivación una vez identificada la zona potencialmente contaminada.
16 CONCLUSIONES
• Se realizó el diseño conceptual del sistema aerodinámico de una aeronave STOL para
transportar personal y equipo de desminado en Colombia que optimiza el peso y
complejidad de los sistemas, y es de manufactura simple.
• Se realizó el diseño del sistema de alta sustentación de la aeronave, que es capaz de generar
la sustentación necesaria para elevar la aeronave a casi cualquier altura del territorio
nacional.
• Se realizó el diseño del sistema del fuselaje que minimiza el arrastre sin comprometer la
comodidad de los pasajeros y con el suficiente espacio para llevar el equipo. También, tiene

38
espacio suficiente para reclinar una silla en caso de que un miembro del equipo resulte
herido.
• Se realizó el diseño del sistema de empenaje que permite la estabilidad y control de la
aeronave. Se analizó el caso básico de estabilidad estática longitudinal en fase de crucero.
17. BIBLIOGRAFÍA
[1] J. Roskam, Part I: Preliminary sizing of airplanes, Lawrence, Kansas: DAR corporation, 1997.
[2] J. Roskam, Part III: Layout design of cockpit, fuselage, wing and empennage: Cutaways and inboard
profiles, Lawrence, Kansas: DAR corporation, 1997.
[3] J. D. Anderson, Fundamentals of aerodynamics, Maryland: McGraw-Hill, 2001.
[4] M. Sadraey, Aircaft design: a systems engineering approach, New Hapmshire: Wiley, 2013.
[5] R. Salazar, «Descontamina Colombia,» Alto comisionado para la paz, [En línea]. Available:
http://www.accioncontraminas.gov.co/estadisticas/Paginas/victimas-minas-antipersonal.aspx. [Último
acceso: 21 04 2018].
[6] P. Republica, «Normatividad de la acción integral contra minas antipersonal en Colombia,» Programa
Presidencial para la Acción contra Minas Antipersonal (PAICMA), Bogotá, 2014.
[7] N. A. T. Organization, The aerodynamics of V/STOL aircraft, Berkley, California: AGARD, 2011.
[8] C. Heintz, «Anatomy of a STOL aircraft: Designing a Modern Short Take-Off and Landing Aircraft,»
Mexico, 2009.
[9] D. Raymer, Aircraft design: a conceptual approach, Second ed., Washington D.C: American institute of
aeronautics and astronautics, Inc., 1992.
[10] C. Heintz, «Zenith air,» [En línea]. Available: http://www.zenithair.net/airfoils/. [Último acceso: 15 11
2018].
[11] I. H. Abbot y A. Von Doenhoff, Theory of wing sections including a summary of airfoil data, New York:
Dover publications, Inc, 1959.
[12] J. Roskam, Part VI: Preliminary calculation of aerodynamic thrust and power Characteristics, Lawrence,
Kansas: DAR corporation, 1997.
[13] J. Franklin, «V/STOL Dynamics, Control, and Flying Qualities,» NASA, Moffet Field, 2000.

39
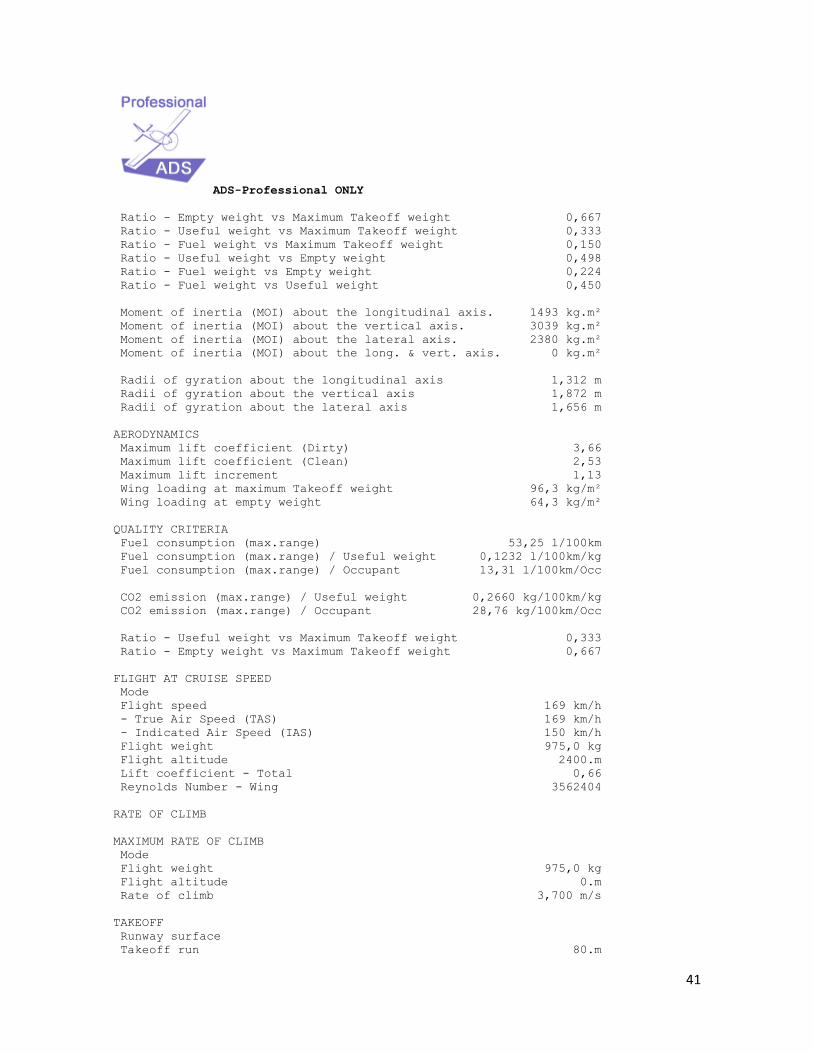
18. ANEXOS
1. Resultados completos simulación software ADS light
GENERAL (ADS V327)
Model Zenith STOL CH 801
Manufacturer
Sources Manufacturer website, 3-Vieuw drawing
Classification Light Airplane
General Layout Conventional
Flight Controls Dual central stick control
Accommodations 4 seats
Airworthiness Requirements FAR Part 23 (N)
Aircraft Type Touring
Airframe Fabric, Light alloy, Tube
Wing Configuration Braced, Rectangular, Unswept, High
Tail Configuration T-Tail, Fuselage mounted
Power Plant Configuration Single-engine, Turboprop, Tractor,
... Fuselage mounted
Landing Gear Configuration Fixed, Nose, Fuselage mounted
Length Overall 8,310 m
Height Overall 3,780 m
Maximum Positive Load Factor 3,8
Maximum Negative Load Factor -1,9
WING
Area 13,500 m²
Span 10,000 m
Aspect ratio (geometric) 7,41
Aspect ratio (aerodynamic) 7,41
Dihedral 0,0°
Incidence at root position 2,0°
Standard mean chord 1,350 m
AIRFOIL CHARACTERISTICS
WING LEADING EDGE DEVICE
Type
FLAPERONS
Type
Area (both) 3,460 m²
AIRFOIL OPTIMISATION
AIRFOIL GENERATING LOWER DRAG AT DESIGN SPEED
ADS-Professional ONLY
TAILS
Tails area 4,750 m²
Tails area / Wing area 0,352
HORIZONTAL TAIL
Type Stabiliser and elevator

40
Area 3,510 m²
AIRFOIL CHARACTERISTICS
ELEVATOR
Area 0,877 m²
Ratio - Elevator area vs Horizontal tail area 0,250
AIRFOIL OPTIMISATION
AIRFOIL GENERATING LOWER DRAG AT DESIGN SPEED
ADS-Professional ONLY
VERTICAL TAIL
Type Fin and rudder
Area 1,240 m²
AIRFOIL CHARACTERISTICS
RUDDER
Area 0,434 m²
Ratio - Rudder area vs Vertical tail area 0,350
FUSELAGE
Maximum Width 1,120 m
LANDING GEAR
Base 1,700 m
Track 1,600 m ( 16,0%)
ENGINE
Engine number 1
Engine model
Engine type
Weight-to-power ratio (Power loading) 9,69 kg/kW
PROPELLER
Number of propeller 1
Type
Number of blades 3
Propeller diameter 0,500 m
Disc area 0,196 m²
FUEL SYSTEM
Fuel system - Maximum fuel capacity 270.l
Fuel system - Fuel unusable 54.l
WEIGHT AND LOADING
Maximum Takeoff weight 1300,0 kg
Empty weight 867,6 kg
Useful weight 432,4 kg
Weight of fuel 194,4 kg
MISSION SEGMENT WEIGHT FRACTION
41
ADS-Professional ONLY
Ratio - Empty weight vs Maximum Takeoff weight 0,667
Ratio - Useful weight vs Maximum Takeoff weight 0,333
Ratio - Fuel weight vs Maximum Takeoff weight 0,150
Ratio - Useful weight vs Empty weight 0,498
Ratio - Fuel weight vs Empty weight 0,224
Ratio - Fuel weight vs Useful weight 0,450
Moment of inertia (MOI) about the longitudinal axis. 1493 kg.m²
Moment of inertia (MOI) about the vertical axis. 3039 kg.m²
Moment of inertia (MOI) about the lateral axis. 2380 kg.m²
Moment of inertia (MOI) about the long. & vert. axis. 0 kg.m²
Radii of gyration about the longitudinal axis 1,312 m
Radii of gyration about the vertical axis 1,872 m
Radii of gyration about the lateral axis 1,656 m
AERODYNAMICS
Maximum lift coefficient (Dirty) 3,66
Maximum lift coefficient (Clean) 2,53
Maximum lift increment 1,13
Wing loading at maximum Takeoff weight 96,3 kg/m²
Wing loading at empty weight 64,3 kg/m²
QUALITY CRITERIA
Fuel consumption (max.range) 53,25 l/100km
Fuel consumption (max.range) / Useful weight 0,1232 l/100km/kg
Fuel consumption (max.range) / Occupant 13,31 l/100km/Occ
CO2 emission (max.range) / Useful weight 0,2660 kg/100km/kg
CO2 emission (max.range) / Occupant 28,76 kg/100km/Occ
Ratio - Useful weight vs Maximum Takeoff weight 0,333
Ratio - Empty weight vs Maximum Takeoff weight 0,667
FLIGHT AT CRUISE SPEED
Mode
Flight speed 169 km/h
- True Air Speed (TAS) 169 km/h
- Indicated Air Speed (IAS) 150 km/h
Flight weight 975,0 kg
Flight altitude 2400.m
Lift coefficient - Total 0,66
Reynolds Number - Wing 3562404
RATE OF CLIMB
MAXIMUM RATE OF CLIMB
Mode
Flight weight 975,0 kg
Flight altitude 0.m
Rate of climb 3,700 m/s
TAKEOFF
Runway surface
Takeoff run 80.m

42
Takeoff distance to 15m 133.m
Takeoff weight 1300,0 kg
Flight altitude 1500.m
At rotation speed ...
BEST ENDURANCE
Endurance 3 h 0 min
BEST RANGE
Range 507 km
STALL
Stall speed (clean)
Mode
Stall speed 77 km/h
Flight weight 975,0 kg
Flight Altitude 0.m
Lift 9561 N
Lift coefficient 2,53
Stall speed (dirty)
Mode
Stall speed 64 km/h
Flight weight 975,0 kg
Flight Altitude 0.m
Lift 9561 N
Lift coefficient 3,66
MAXIMUM SPEED
Maximum speed 240 km/h
CEILING
Ceiling 4267.m
43
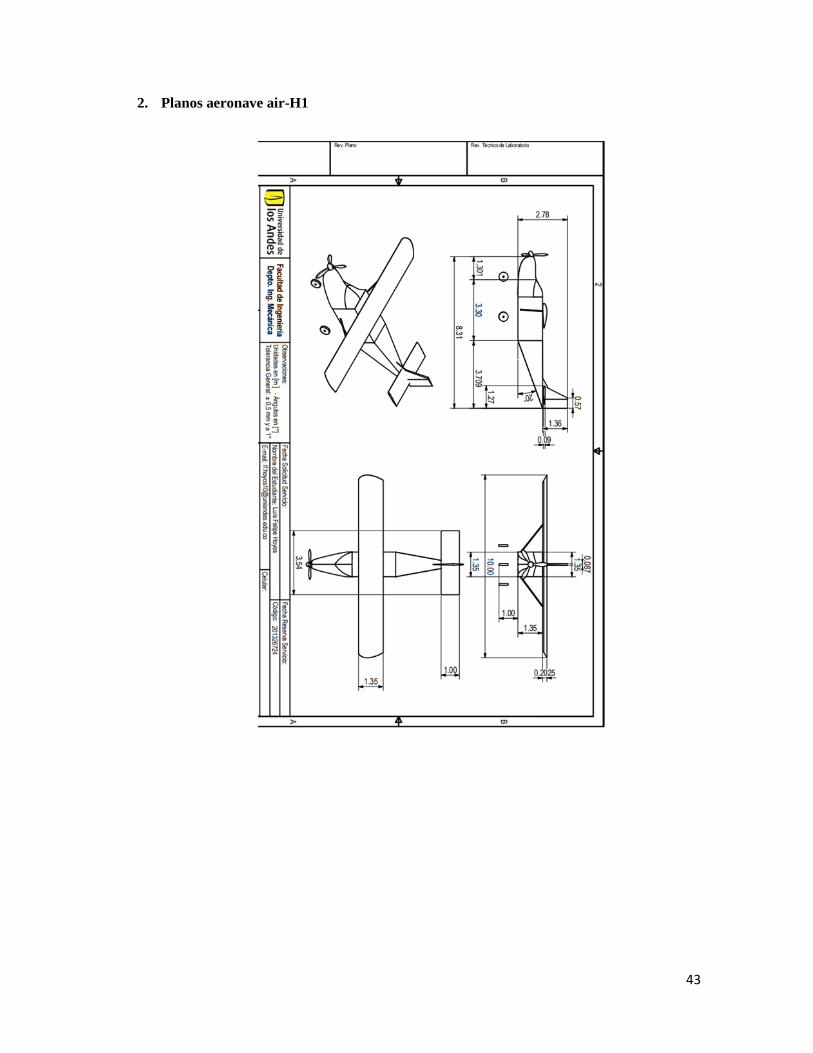
2. Planos aeronave air-H1
Recommended

















