EUROPA
bis 80 kg Nutzlast
R-SERIE

3
Kawasaki Robotics erfindet sich neu. Die R-SERIE erfüllt alsinnovative Robotergeneration die steigenden Ansprüche ihrer Kunden.
DIE R-SERIE
1. GeschwindigkeitMaximale Beschleunigung und Geschwindigkeit werden durch konsequente Nutzung von Hoch-leistungsmotoren in einem innovativen und leichten Design erreicht. Die Beschleunigung wird auto-matisch an die Traglast und Position des Roboters angepasst. Die best mögliche Leistung und Taktzeit werden somit gewährleistet.
2. DrehmomentRaumgreifende Greiferkonstruktionen und aus-ladende Werkstückgeometrien sind kein Problem. Dadurch entsteht mehr Raum für kreative Lösungen.
3. ArbeitsbereichGroße Reichweite in den einzelnen Gewichtsklas-sen ermöglicht eine hohe Flexibilität in der Praxis.
»40 Jahre Erfahrung und ausgereifte Robotertechnik«Ein extrem kompaktes und leichtes Design bildet die Basis für hohe Geschwindigkeit und Steifig-keit sowie enorme Reichweite.
»Ihr Ziel ist unsere Aufgabe«Mit Intelligenz und Flexibilität hat Kawasaki die leistungsstärksten Roboter ihrer Klasse ge-schaffen. Kombiniert mit einer hoch entwickelten Steuerung erfüllen sie zukunftssicher die Anforderungen für verschiedenste Aufgabenfelder.
4. SchutzDoppelte Dichtungen an den Handachsen 4 – 6 ermöglichen Schutzklasse IP67. Die Achsen 1 – 3 verfügen über Schutzklasse IP65 (IP67 optional).
5. FunktionenIn den Arm integrierte Signalleitungen und Luft-schläuche ermöglichen die direkte Anbindung von z. B. Greifern ohne zusätzliche Verkabe-lung durch oder an dem Roboterarm. Weitere benötigte Leitungen oder Schläuche können natürlich „Simple and friendly“ an den vorhan-denen Fixierungspunkten montiert werden.
»Simple and friendly«
IN DIE ZUKUNFT
4 5
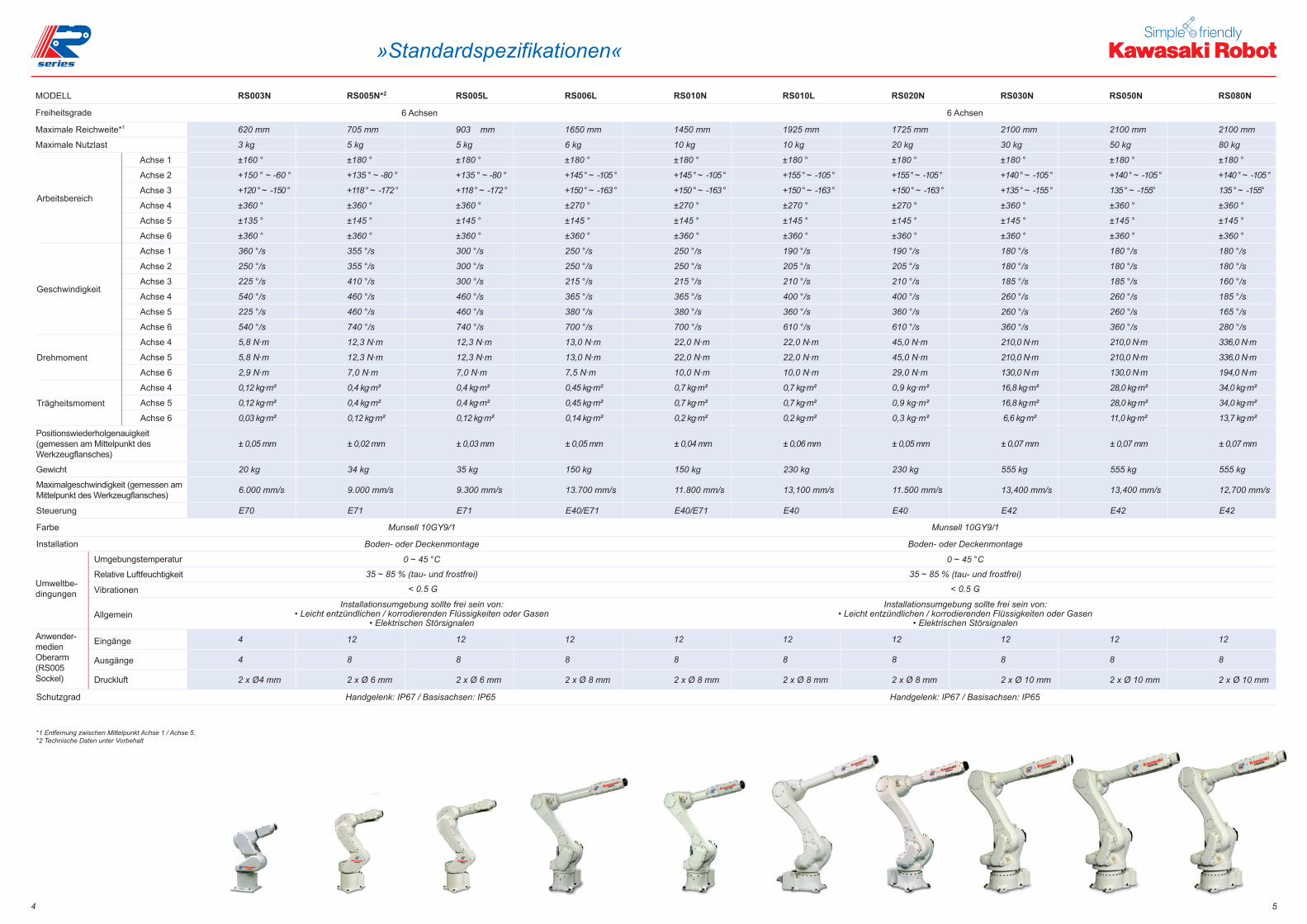
»Standardspezifikationen«
*1 Entfernung zwischen Mittelpunkt Achse 1 / Achse 5.*2 Technische Daten unter Vorbehalt
MODELL RS003N RS005N*2 RS005L RS006L RS010N RS010L RS020N RS030N RS050N RS080N
Freiheitsgrade
Maximale Reichweite*1 620 mm 705 mm 903 mm 1650 mm 1450 mm 1925 mm 1725 mm 2100 mm 2100 mm 2100 mm
Maximale Nutzlast 3 kg 5 kg 5 kg 6 kg 10 kg 10 kg 20 kg 30 kg 50 kg 80 kg
Achse 1 ±160 ° ±180 ° ±180 ° ±180 ° ±180 ° ±180 ° ±180 ° ±180 ° ±180 ° ±180 °
Achse 2 +150 ° ~ -60 ° +135 ° ~ -80 ° +135 ° ~ -80 ° +145 ° ~ -105 ° +145 ° ~ -105 ° +155 ° ~ -105 ° +155 ° ~ -105 ° +140 ° ~ -105 ° +140 ° ~ -105 ° +140 ° ~ -105 °
Achse 3 +120 ° ~ -150 ° +118 ° ~ -172 ° +118 ° ~ -172 ° +150 ° ~ -163 ° +150 ° ~ -163 ° +150 ° ~ -163 ° +150 ° ~ -163 ° +135 ° ~ -155 ° 135 ° ~ -155° 135 ° ~ -155°
Achse 4 ±360 ° ±360 ° ±360 ° ±270 ° ±270 ° ±270 ° ±270 ° ±360 ° ±360 ° ±360 °
Achse 5 ±135 ° ±145 ° ±145 ° ±145 ° ±145 ° ±145 ° ±145 ° ±145 ° ±145 ° ±145 °
Achse 6 ±360 ° ±360 ° ±360 ° ±360 ° ±360 ° ±360 ° ±360 ° ±360 ° ±360 ° ±360 °
Achse 1 360 °/s 355 °/s 300 °/s 250 °/s 250 °/s 190 °/s 190 °/s 180 °/s 180 °/s 180 °/s
Achse 2 250 °/s 355 °/s 300 °/s 250 °/s 250 °/s 205 °/s 205 °/s 180 °/s 180 °/s 180 °/s
Achse 3 225 °/s 410 °/s 300 °/s 215 °/s 215 °/s 210 °/s 210 °/s 185 °/s 185 °/s 160 °/s
Achse 4 540 °/s 460 °/s 460 °/s 365 °/s 365 °/s 400 °/s 400 °/s 260 °/s 260 °/s 185 °/s
Achse 5 225 °/s 460 °/s 460 °/s 380 °/s 380 °/s 360 °/s 360 °/s 260 °/s 260 °/s 165 °/s
Achse 6 540 °/s 740 °/s 740 °/s 700 °/s 700 °/s 610 °/s 610 °/s 360 °/s 360 °/s 280 °/s
Achse 4 5,8 N∙m 12,3 N∙m 12,3 N∙m 13,0 N∙m 22,0 N∙m 22,0 N∙m 45,0 N∙m 210,0 N∙m 210,0 N∙m 336,0 N∙m
Achse 5 5,8 N∙m 12,3 N∙m 12,3 N∙m 13,0 N∙m 22,0 N∙m 22,0 N∙m 45,0 N∙m 210,0 N∙m 210,0 N∙m 336,0 N∙m
Achse 6 2,9 N∙m 7,0 N∙m 7,0 N∙m 7,5 N∙m 10,0 N∙m 10,0 N∙m 29,0 N∙m 130,0 N∙m 130,0 N∙m 194,0 N∙m
Achse 4 0,12 kg∙m² 0,4 kg∙m² 0,4 kg∙m² 0,45 kg∙m² 0,7 kg∙m² 0,7 kg∙m² 0,9 kg∙m² 16,8 kg∙m² 28,0 kg∙m² 34,0 kg∙m²
Achse 5 0,12 kg∙m² 0,4 kg∙m² 0,4 kg∙m² 0,45 kg∙m² 0,7 kg∙m² 0,7 kg∙m² 0,9 kg∙m² 16,8 kg∙m² 28,0 kg∙m² 34,0 kg∙m²
Achse 6 0,03 kg∙m² 0,12 kg∙m² 0,12 kg∙m² 0,14 kg∙m² 0,2 kg∙m² 0,2 kg∙m² 0,3 kg∙m² 6,6 kg∙m² 11,0 kg∙m² 13,7 kg∙m²
Positionswiederholgenauigkeit (gemessen am Mittelpunkt des Werkzeugflansches)
± 0,05 mm ± 0,02 mm ± 0,03 mm ± 0,05 mm ± 0,04 mm ± 0,06 mm ± 0,05 mm ± 0,07 mm ± 0,07 mm ± 0,07 mm
Gewicht 20 kg 34 kg 35 kg 150 kg 150 kg 230 kg 230 kg 555 kg 555 kg 555 kg
Maximalgeschwindigkeit (gemessen am Mittelpunkt des Werkzeugflansches)
6.000 mm/s 9.000 mm/s 9.300 mm/s 13.700 mm/s 11.800 mm/s 13,100 mm/s 11.500 mm/s 13,400 mm/s 13,400 mm/s 12,700 mm/s
Steuerung E70 E71 E71 E40/E71 E40/E71 E40 E40 E42 E42 E42
Farbe
Installation
Umgebungstemperatur
Relative Luftfeuchtigkeit
Vibrationen
Allgemein
Eingänge
Ausgänge
Druckluft
Schutzgrad
6 Achsen 6 Achsen
Arbeitsbereich
Geschwindigkeit
Drehmoment
Trägheitsmoment
Umweltbe-dingungen
Anwender-medienOberarm (RS005 Sockel)
Munsell 10GY9/1 Munsell 10GY9/1
Boden- oder Deckenmontage Boden- oder Deckenmontage
0 ~ 45 °C 0 ~ 45 °C
35 ~ 85 % (tau- und frostfrei) 35 ~ 85 % (tau- und frostfrei)
< 0.5 G < 0.5 G
Installationsumgebung sollte frei sein von:• Leicht entzündlichen / korrodierenden Flüssigkeiten oder Gasen
• Elektrischen Störsignalen
Installationsumgebung sollte frei sein von:• Leicht entzündlichen / korrodierenden Flüssigkeiten oder Gasen
• Elektrischen Störsignalen
4 12 12 12 12 12 12 12 12 12
4 8 8 8 8 8 8 8 8 8
2 x Ø4 mm 2 x Ø 6 mm 2 x Ø 6 mm 2 x Ø 8 mm 2 x Ø 8 mm 2 x Ø 8 mm 2 x Ø 8 mm 2 x Ø 10 mm 2 x Ø 10 mm 2 x Ø 10 mm
Handgelenk: IP67 / Basisachsen: IP65 Handgelenk: IP67 / Basisachsen: IP65
JT3 JT3
JT2
A
JT4±360°
JT6±360°
JT5±135°
JT1
JT1
JT2 600
1200
15001500
9790
108
573
106
250
250
120 250 80
347 620
249.4
84
217
750
125
1600
1600 R216
104
X
Xø0.04
900
450
ø20H7 Dp4
ø5H7 Dp8
ø40
ø31.5±0.2
4-M5 Dp8
15.7
5
ø14
ø9
8
88±0
.1
152
170
130
4-ø9
152
170
88±0.1130
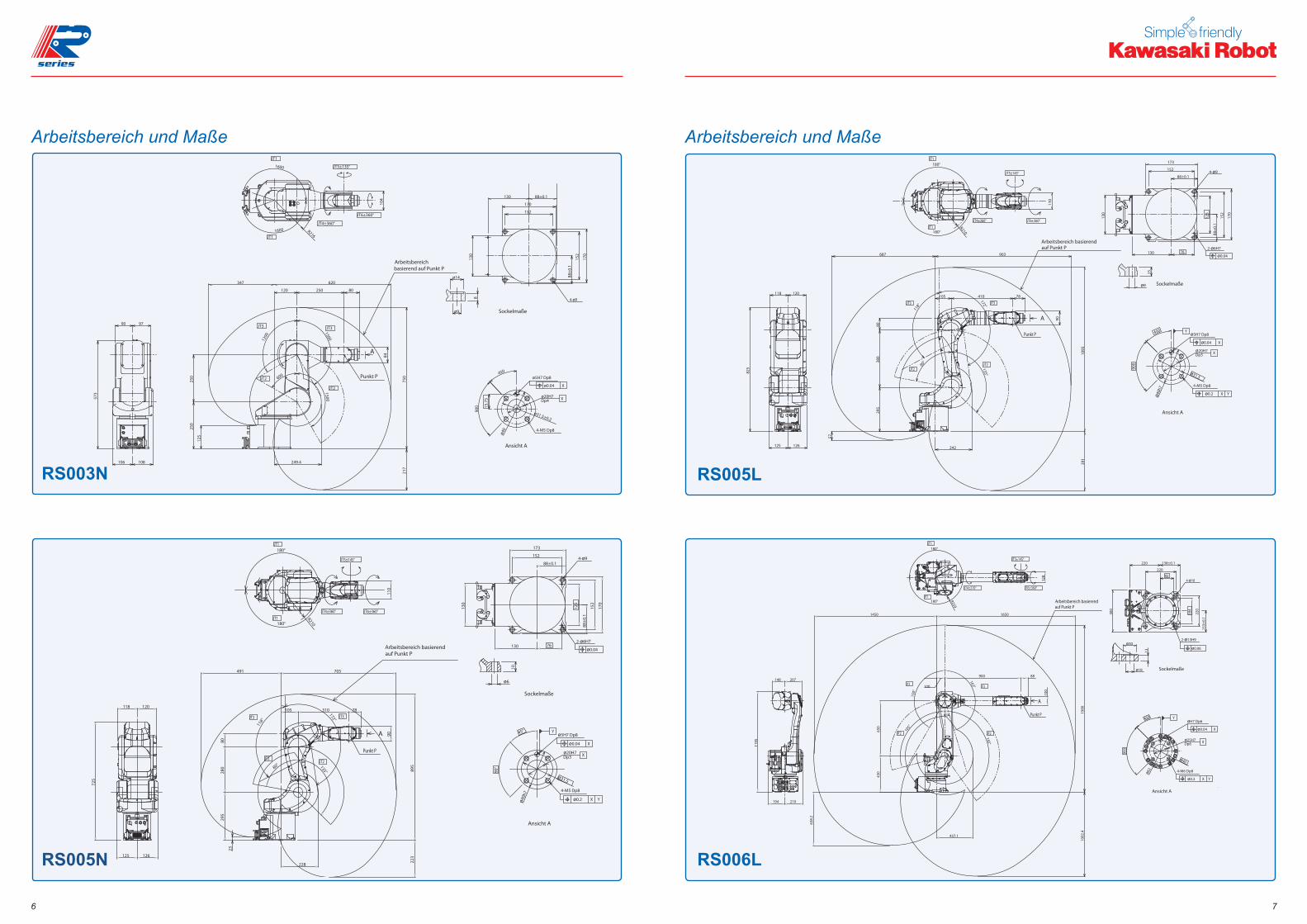
Arbeitsbereichbasierend auf Punkt P
Punkt P
Ansicht A
Sockelmaße
6 7
JT6±360°JT4±360°
JT5±145°
JT1180°
180°JT1
JT2JT2
JT3
A
118°
172° JT3
687 903
1093
391
242
295
380
80
105 410 78
825
110
R210
80°
135°
Punkt P
Arbeitsbereich basierendauf Punkt P
57
120118
126125
90
ø0.04
X
Y
X
ø0.2 X Y
ø5H7 Dp8
4-M5 Dp8
ø40h
7
ø31.5
450
ø20H7Dp3
900
ø0.04
ø9
15
88±0.1
170
88±0
.1
173
152
152
125
76
130
130
4-ø9
2-ø6H7
Ansicht A
Sockelmaße
JT2 JT2
JT3 JT3
A
JT1
JT1
180°
180°
JT4±270°
JT5±145°
JT6±360°
Punkt P
Arbeitsbereich basierendauf Punkt P
100
88
210194
148 207
128
650
430
145°
105°
150°
163°
100
900
R259
1002
.4
16501450
638.
2
1980
437.1
1195
ø0.04
Y
YXø0.3
X
X
900
450
ø40
øH7 Dp6
4-M6 Dp8
ø25H7 Dp6
ø62
ø0.06
4-ø18
2-ø13H9
92
220
138±0.1220
184
220
153±
0.1
300
ø18
13
ø30
Ansicht A
Sockelmaße
RS003N RS005L
RS005N RS006L
JT6±360°JT4±360°
JT5±145°
JT1180°
180°
JT2JT2
A
JT3
118°
JT3
172°
ø0.04
X
Y
X
ø0.2 X Y
ø0.04
2-ø6H7
4-ø9
130
130
76
125
152
152
173
88±0
.1
170
88±0.1
10
ø6
Dp3ø20H7
90°
45°ø5H7 Dp8
4-M5 Dp8
ø40h
7
ø31.5
120118
126125
90
23
135°
80°
R210
110
725
78310105
8028
029
5
228 223
895
705491
JT1
Arbeitsbereich basierendauf Punkt P
Punkt P
Ansicht A
Sockelmaße
Arbeitsbereich und Maße Arbeitsbereich und Maße
8 9
JT2
JT2
JT3 JT3
A
JT1
JT1
180°
180°
JT4±270°
JT5±145°
JT6±360°
100
700 88
210194
148 207
128
650
430
145°
105°
163°
150°
802.
417
80
438.
2
1250 1450
305.6
100
R259
1195
Xø0.04
Y
YXø0.3
X
90°
45°
ø40
ø6H7 Dp6
4-M6 Dp8
ø25H7Dp6
ø62
ø0.06
4-ø18
2-ø13H9
92
220
138±0.1220
184
220
153±
0.1
300
13
ø18
ø30
Ansicht A
Sockelmaße
Arbeitsbereich basierendauf Punkt P
Punkt PJT2
JT2
JT3 JT3
JT6±360°
JT5±145°
JT4±270°
180°
180°
JT1
JT1
A
1037
.920
40
17251425
539.
3
465
770
150 805 95
383.9260220
260170
1360
146
120
155°
105°
150°
163°
R328Y
Ø0.04 X
X
Ø0.3 X Y
Ø75
45°
90°
Ø63
Ø40H7Dp6
Ø6H7 Dp6
4-M6 Dp9
ø0.06
ø15
ø9
7
276
276
163±0.1
330
250
168±
0.1
240
120 4-ø18
2-Ø13H9
Ansicht A
Sockelmaße
Arbeitsbereich basierendauf Punkt P
Punkt P
JT2
JT2
JT3JT3
JT1
JT1
180°
180°
JT4±270°
JT5±145°
JT6±360°
A
Arbeitsbereichbasierend auf Punkt P
Punkt P
770
465
19251625
1237
.9
146
739.
3
2240
163°
95150
260220
260
1360
170
150°
105°
155°
120
R328
1005
500.5
Y
ø0.04 X
X
ø0.3 X Y
ø75
45°
90°
ø63
ø40H7Dp6
ø6H7 Dp6
4-M6 Dp9
ø0.06
Sockelmaße
ø15
ø9
7
276
276
163±0.1
330
250
168±
0.1
240
120 4-ø18
2-ø13H9
Ansicht A
JT2 JT2
JT3
JT3
JT6±360°
JT5±145°
JT4±360°
JT1
JT1
A
180°
180°
206
150 1080 165
680
870
105°
140°
1800 2100
625.
2
158
2630
1066
.5
135°
R397
277
298
307
1696
.5
244
619.2
155°
X
X
Y
X
Ø0.3
YØ0.06
Ø80
Ø50H7Dp6.5
Ø94
30°
6-M8 Dp13
60°
Ø8H7 Dp8
Ø0.06
210±0.1
380
300
170
320
400
340
300
380
210±
0.1
2-Ø13H9
8-Ø18
Ø26
Ø18
17
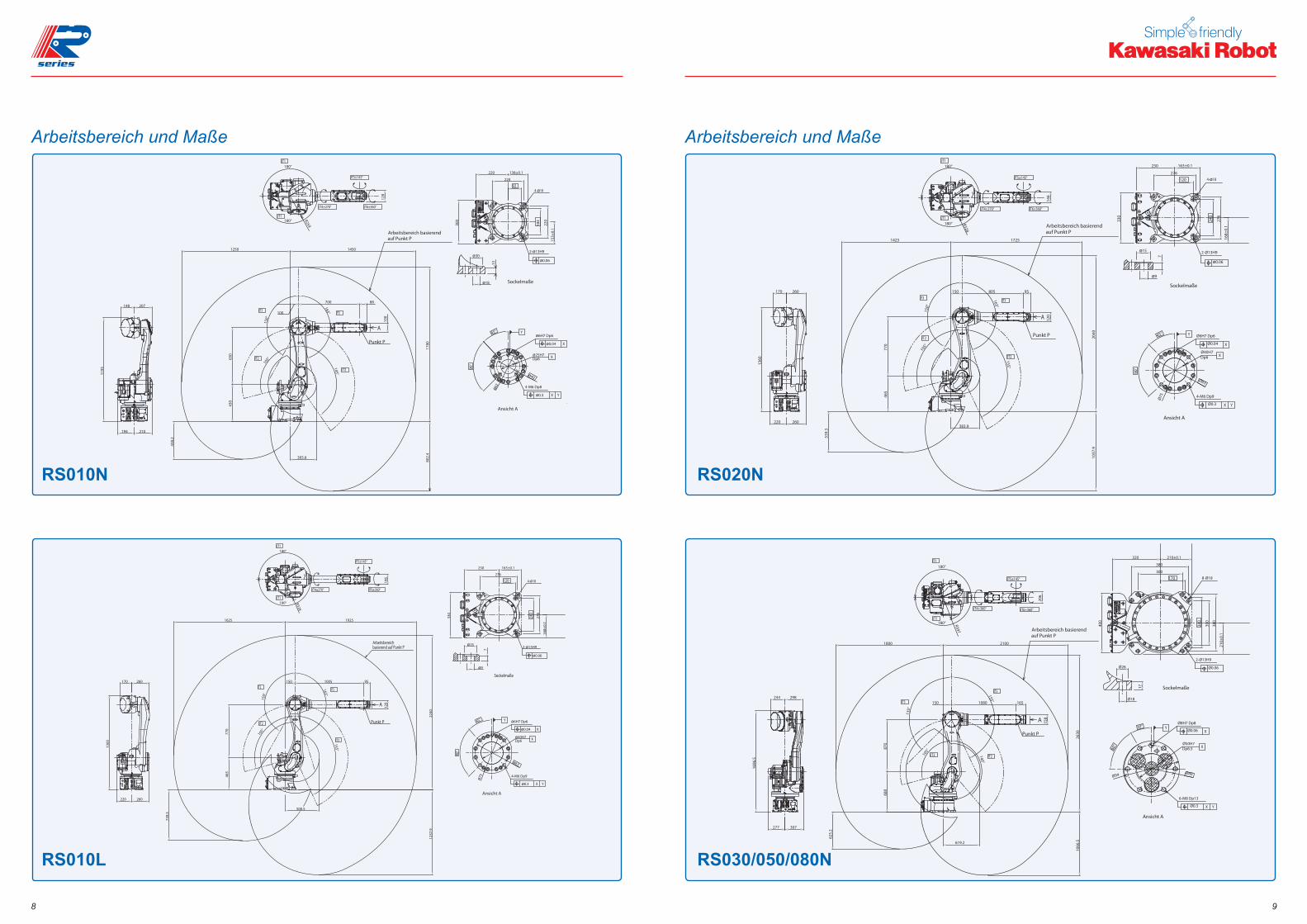
Punkt P
Arbeitsbereich basierendauf Punkt P
Sockelmaße
Ansicht A
RS010L
RS020N
RS030/050/080N
RS010N
Arbeitsbereich und Maße Arbeitsbereich und Maße
10 11
TOP VIEW
420 500
250
550 550
1200
E70/E71 E40/E42
1. SteuerungDer E-Controller als konsequente Weiterent- wicklung des bestehenden Steuerungskonzepts wurde in enger Zusammenarbeit mit Kawasaki Kunden entwickelt. So entstand ein technisch ausgereiftes Produkt, gewohnt einfach zu bedienen und leistungsstark.
2. Kompakt und erweiterbarMaximal 10 externe Achsen können integriert wer-den, davon bis zu drei im Controllergehäuse (E4x). Alle gängigen Bus Systeme (Interbus, Profibus,ProfiNet…) werden unterstützt. Die integrierte Soft SPS ist via Teach Pendant oder komfortabel am PC (Option) editierbar. Kundenspezifische Benutzer-oberflächen können zur einfachen Steuerung des Roboters und auch der Peripherie programmiert und genutzt werden.
3. Anwenderfreundliches SystemProgrammstart und das Einschalten der Motor-spannung sind direkt vom Handbediengerät aus möglich. Die parallele Darstellung von zwei Infor-mationsbildschirmen (z.B. Positions- und Signaldaten) vereinfacht die Prozesskontrolle.
4. FunktionenIntegrierte Softwarefunktionen dienen zur Unter-stützung verschiedenster Applikationen. Individuell kombiniert und programmiert können so höchst komplexe Systeme konzipiert werden (z. B. Soft Absorber, Collision Detection, Conveyor Tracking, und viele mehr).
5. SystemSchnellste Ausführung von Programmen, Lade- und Speichervorgängen sowie eine exakte Bahn-kontrolle und vieles mehr sind durch modernes Rechnerdesign und leistungsstarke Komponenten möglich. Der Arbeitsspeicher von 8 MB (ca. 80.000 Schritte) und die USB Schnittstelle gehören zum Standard.
6. Wartung»Simple and friendly« – Durch den optimierten modularen Aufbau der Kawasaki Steuerung wird höchste Wartungsfreundlichkeit erreicht. Weiterhin sorgen integrierte Service- und Diagnosetools für eine erhöhte Sicherheit im Betrieb. Ferndiagnosevia Ethernet ist ebenfalls im Standard enthalten.
CONTROLLER
Hinweis: Nicht alle Optionen kombinierbar.
Anzahl der gesteuerten Achsen
Servomotor Bürstenloser Drehstrom-Servomotor
Positionserfassung Absolutwert-Encoder
Antriebssystem Voll digital gesteuertes Servosystem
Programmierung Block- oder AS-Sprache
Koordinatensysteme Einzelachsen, Basis, Werkzeug, externes Werkzeug (optional)
Arten der Bewegungssteuerung Achs-, Linear- und Kreisinterpolation
Externe Externes Signal Motorspannung, externes Signal HOLD, etc.
Eingänge
Ausgänge
Analoge Eingänge (optional) 8/16
Analoge Ausgänge (optional)
Speicherkapazität 8 MB (ca. 80.000 Programmschritte)
Externer Speicher 2 x USB
PC, Netzwerk, etc. 2 x RS-232C, 2 x Ethernet
Feldbus (optional)DeviceNet ©, PROFIBUS ©, PROFINET ©, INTERBUS-S ©, Ethernet/IP ©, CC-Link ©, CANopen ©,
Modbus TCP ©, Control Net ©
Teach Pendant6,4 Zoll TFT LCD-Bildschirm mit Touch Panel, Not-Aus-Schalter, Teach-Lock, Zustimmschalter, Motor-
spannung, Programmstart, Hold/Run
Bedienfeld Not-Aus-Schalter, Meldeleuchte Steuerspannung, TEACH/REPEAT
Kabellänge (Controller – Arm, Controller – Teach Pendant)
10 Meter (Arm: optional bis 40 Meter), (TP: optional bis 30 Meter)
Abmessungen (BxTxH in mm)
Gewicht (kg)
Spannungsversorgung
Erdung
Sicherheitskategorie 3, Performance Level d (EN ISO13849-1:2008)
MODELL E70 E71 E40 E42
Signale
Datenübertragungs-schnittstelle
Dreiphasen Wechselstrom 380-415V ± 10%, 50/60Hz, 3 Phasen, 4,9kVA
(E40) / 9,9kVA (E42)
550x550x1200
180
Umgebungstemperatur / Luftfeuchtigkeit
Oberfläche
145
<100Ω, Ableitstrom ≤ 30mA <100Ω, Ableitstrom max. 10mA
500x420x250
30
4/8/12 4/8/12/16
32 (optional 96) 32 (optional 128)
32 (optional 128)32 (optional 96)
Wechselstrom 200-240V ± 10%, 50/60Hz, 1 Phase, 1,5kVA (E70) /
3kVA (E71)
0-45°C (horizontal) / 0-40°C (vertikal), 35-85% (tau- und frostfrei)
0-45°C, 35-85% (tau- und frostfrei)
verzinkt / verchromt Lackierung: Munsell 10GY9/1
6 (optional 8) 6 (optional 16)
Sicherheits- und Vorsichtsmaßnahmen
Das mit dem Betrieb und der Wartung Ihres Systems befasste Personal – einschließlich des Personals von Kawasaki – ist gehalten, jederzeit sämtliche Sicherheitsvorschriften streng zu befolgen und die Handbücher und alle sich auf die Anlage beziehenden Sicherheitsdokumente sorgfältig durchzulesen.
Bei den in diesem Katalog beschriebenen Produkten handelt es sich um Standart-Industrieroboter. Bei spezi-fischen Anwendungen oder bei auftretenden Problemen beraten wir gerne hinsichtlich Installation und Sicher-heit. Wir helfen Ihnen gerne.
VORSICHT: Die zur Illustration in der vorliegenden Broschüre verwendeten Fotos wurden teilweise aufge-nommen, nachdem die Sicherheitsumzäunungen und andere, in den Sicherheitsvorschriften vorgeschriebene Sicherheitsvorrichtungen, vom Roboter und seinem Bedienungssystem entfernt wurden.
Anfragen
Kawasaki Robotics GmbH Hauptsitz NeussSperberweg 29 ∙ 41468 NeussE-Mail: [email protected] ∙ www.kawasakirobot.de
Kawasaki Robotics (UK) Ltd.Units 6&7 Easter Court, Europa Boulevard, WestbrookWarrington WA5 5ZB ∙ United KingdomE-Mail: [email protected] ∙ www.kawasakirobot.uk.com
Vertreter
Gedruckt in Deutschland April 2010 Katalog Nr. GD117 Materialien und Spezifikationen können ohne vorherige Ankündigung geändert werden. Irrtümer vorbehalten.
Tel. +49-(0)2131 342 60Fax +49-(0)2131 34 26 22
Tel. +44-(0)1925 71 30 00Fax +44-(0)1925 71 30 01
Recommended





![[Standard] X-Achse Kreuzrolle [Hohe Präzision] X-Achse ...1 -1917 1 -1918 [Standard] X-Achse Kreuzrolle [Hohe Präzision] X-Achse Kreuzrolle Mikrometerschraube QMerkmale: Hochpräzise](https://img.pdfslide.tips/doc/110x75/60c3f5103f38cf550e29a3d4/standard-x-achse-kreuzrolle-hohe-przision-x-achse-1-1917-1-1918-standard.jpg)






![[Vereinfachte Justierung] X-Achse, Schubspindel](https://img.pdfslide.tips/doc/110x75/61bd030a61276e740b0e7380/vereinfachte-justierung-x-achse-schubspindel-.jpg)




