Regimuri speciale ale maşiniide inducţie
Regimul de dublă alimentare
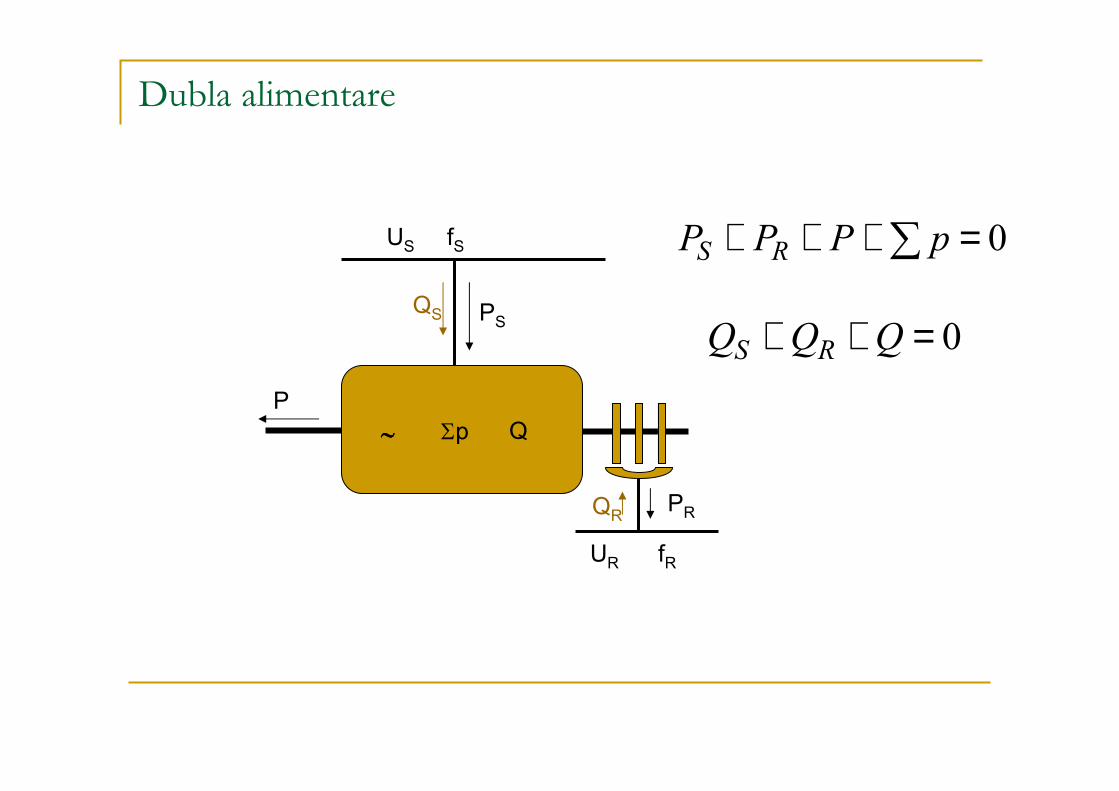
Dubla alimentare
∑ =+++ 0pPPP RSUS fS
UR fR
PS
PR
P
QS
QR
∼∼∼∼ QΣp
0=++ QQQ RS

Conditii de dublă alimentare
RS nnn ±=
Snn <
Snn >
R S T
R S T
M
fS
US
fRUR
nS
nnR
nS
n
nR
Aceeasi succesiune
Succesiune diferită
Cazuri limită
RS ff =Aceeasi succesiune
Succesiune diferită
0=n
Snn ⋅= 2
0=Rf
Snn =Maşina sincronă
Studiul analitic
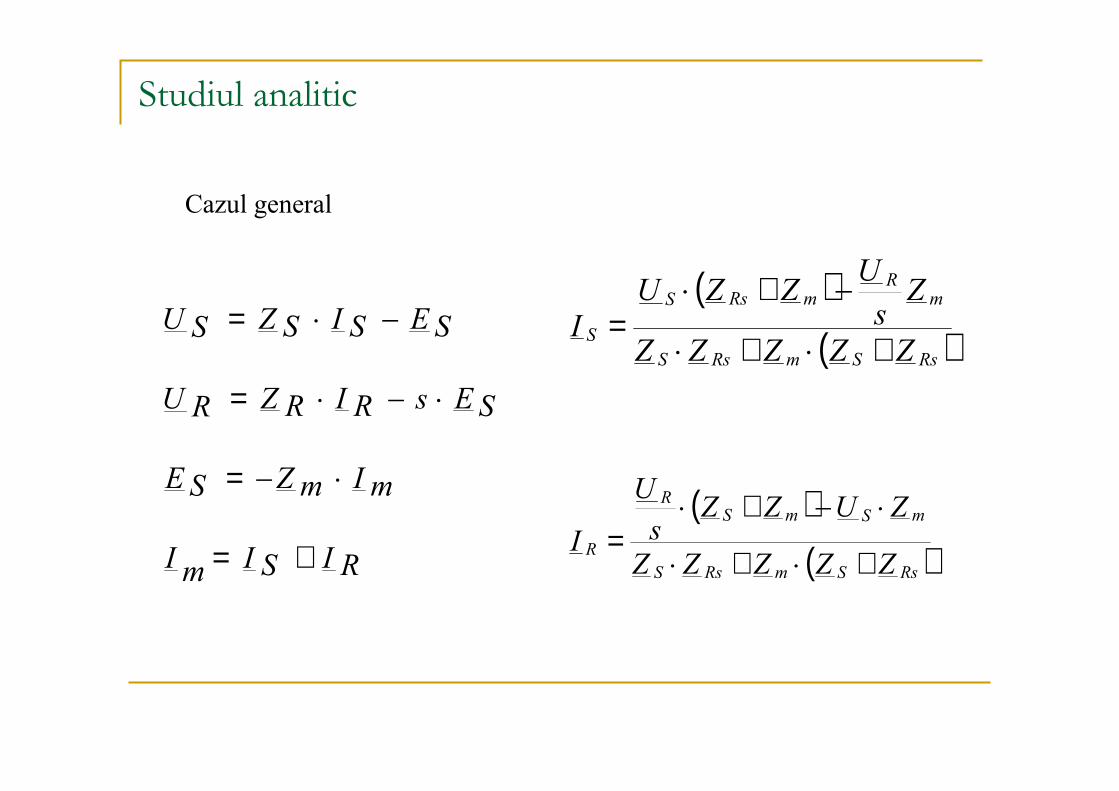
RISImI
mImZSE
SEsRIRZRU
SESISZSU
+=
⋅−=
⋅−⋅=
−⋅=( )
( )RsSmRsS
mR
mRsS
S ZZZZZ
ZsUZZU
I+⋅+⋅
−+⋅=
Cazul general
( )( )RsSmRsS
mSmSR
R ZZZZZ
ZUZZsU
I+⋅+⋅
⋅−+⋅=
Studiul analitic
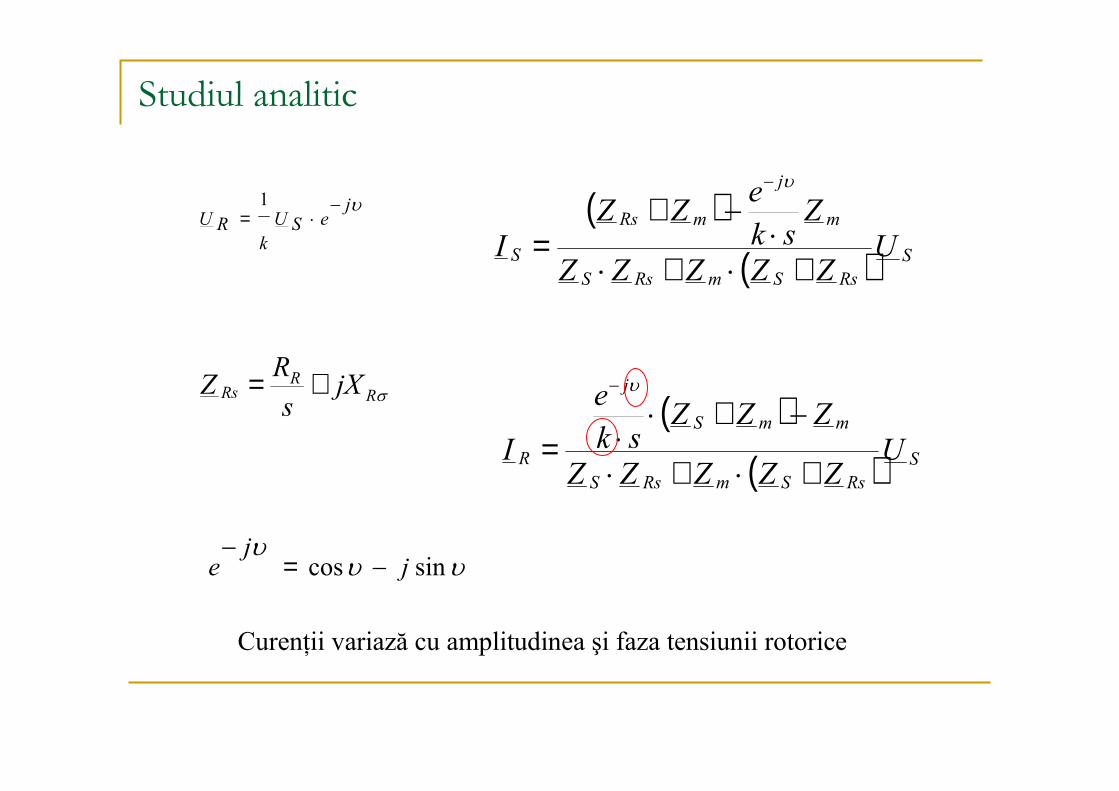
( )( ) S
RsSmRsS
m
j
mRs
S UZZZZZ
Zsk
eZZI
+⋅+⋅⋅
−+=
− υ
( )( ) S
RsSmRsS
mmS
j
R UZZZZZ
ZZZsk
e
I+⋅+⋅
−+⋅⋅=
− υ
υjeSU
kRU
−⋅=
1
υυυ
sincos jj
e −=−
σRR
Rs jXsRZ +=
Curenţii variază cu amplitudinea şi faza tensiunii rotorice
Studiul analitic
( )( ) S
mSRsmS
mmS
j
R UZZZsZZs
ZsZZke
I+⋅⋅+⋅⋅
⋅−+⋅=
− υ
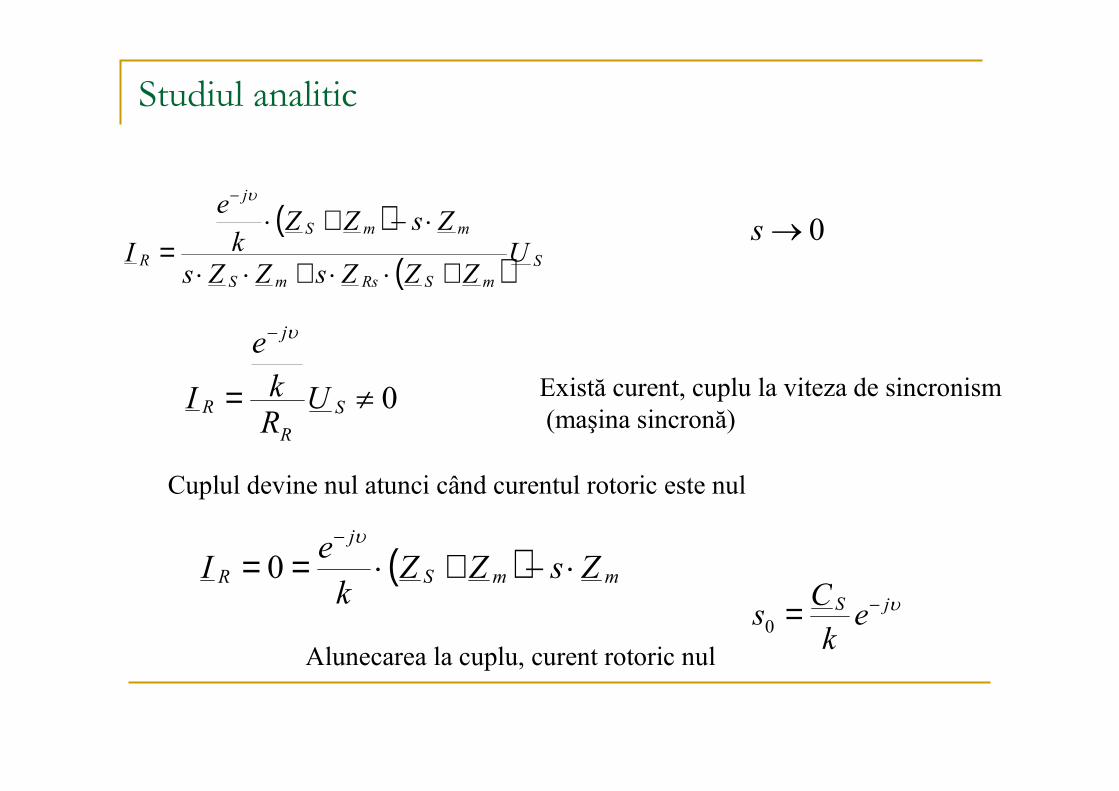
0→s
0≠=
−
SR
j
R URke
I
υ
Există curent, cuplu la viteza de sincronism(maşina sincronă)
Cuplul devine nul atunci când curentul rotoric este nul
( ) mmS
j
R ZsZZkeI ⋅−+⋅==
− υ
0υjS e
kCs −=0
Alunecarea la cuplu, curent rotoric nul
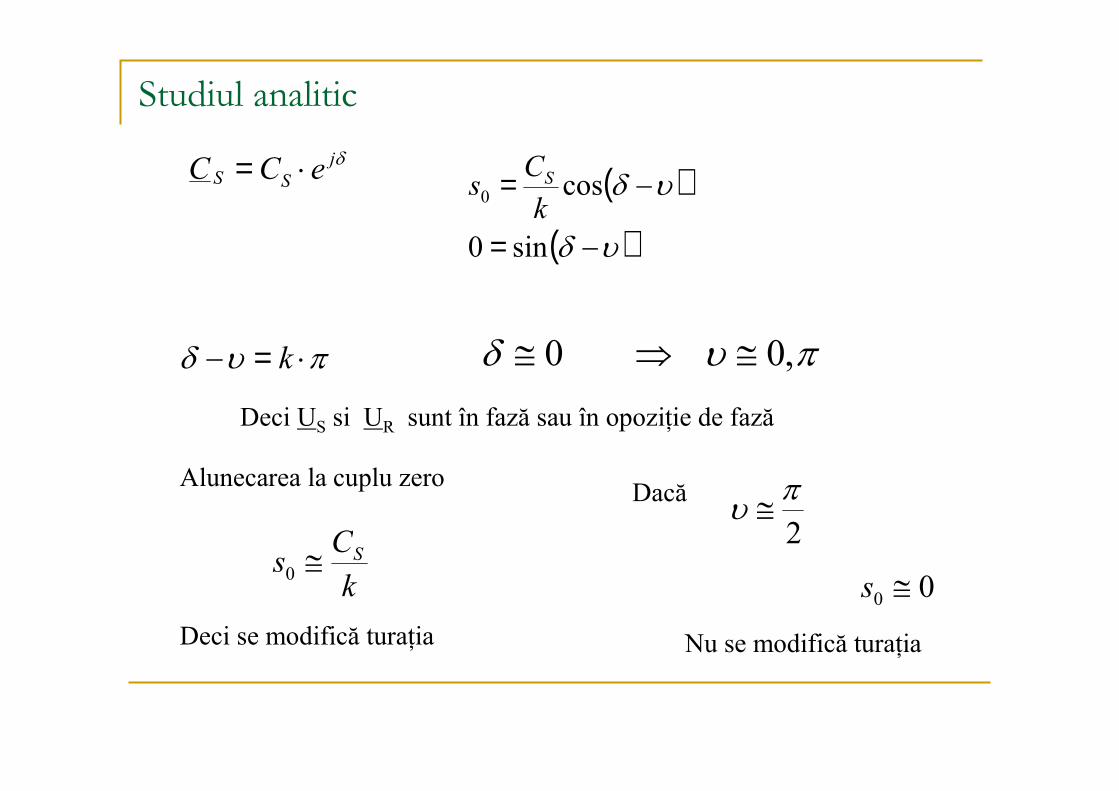
Studiul analiticδj
SS eCC ⋅= ( )
( )υδ
υδ
−=
−=
sin0
cos0 kCs S
πυδ ⋅=− k πυδ ,00 ≅⇒≅
Deci US si UR sunt în fază sau în opoziţie de fază
kCs S≅0
Alunecarea la cuplu zero Dacă2πυ ≅
Deci se modifică turaţia
00 ≅s
Nu se modifică turaţia
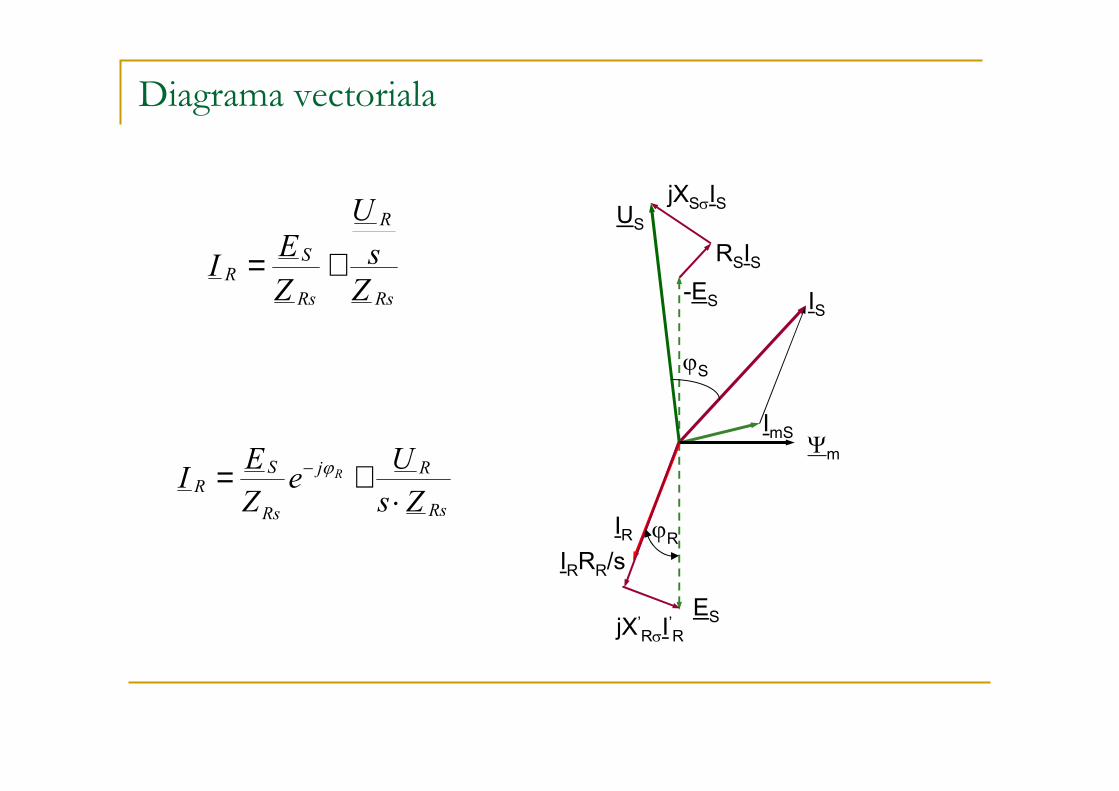
Diagrama vectoriala
Rs
R
Rs
SR Z
sU
ZEI +=
jX’RσI’R
US
ϕS
IR
ES
ImS
IS
RSIS
jXSσIS
-ES
Ψm
ϕRIRRR/s
Rs
Rj
Rs
SR Zs
UeZEI R
⋅+= − ϕ

Studiul analitic.Tensiune în fază cu cea statorică
Rj
Rs
RSR e
ZUEI ϕ−+=
∑−+= pPPP RS
ES
IRUR/s
US
ϕS
Im
IS
jXSσIS
-ES
RSIS
Ψm
UR/s
IR
PR < 0
QR < 0
RS QQQ +=
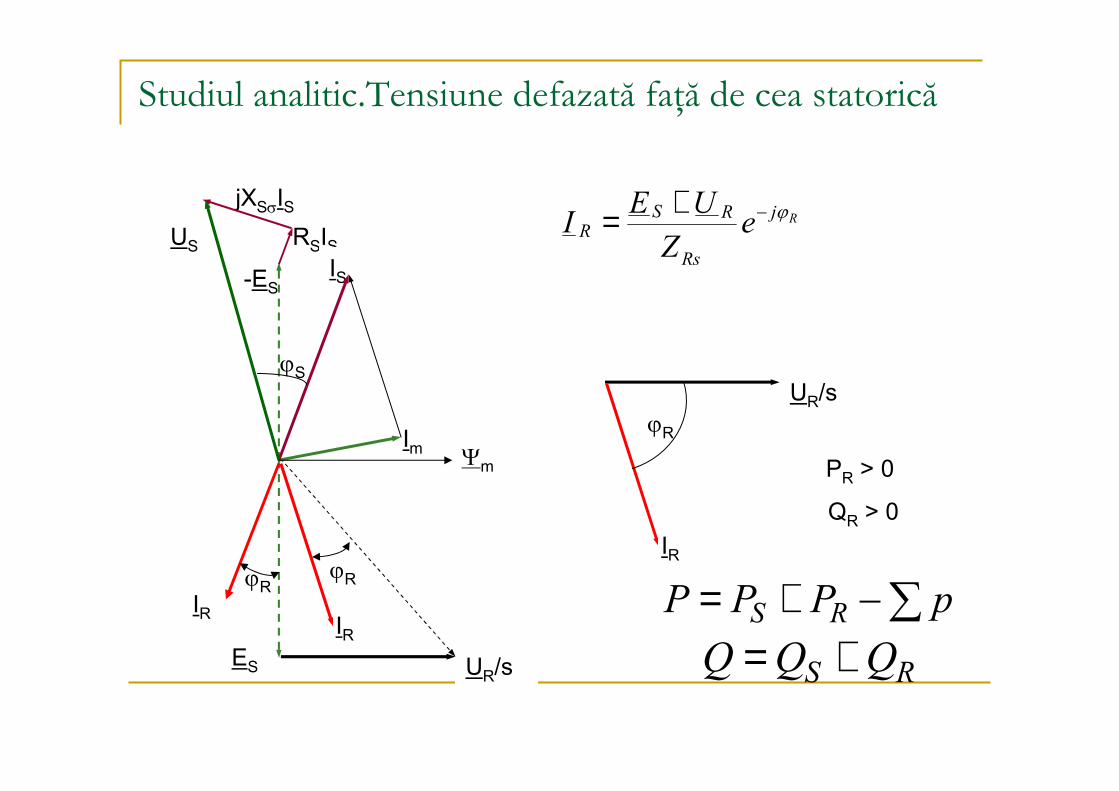
Studiul analitic.Tensiune defazată faţă de cea statorică
ES UR/s
Im
RSIS-ES
jXSσIS
ϕS
ISUS
IR
ϕR
IRϕR
Ψm
Rj
Rs
RSR e
ZUEI ϕ−+=
UR/s
IR
ϕR
∑−+= pPPP RS
PR > 0
QR > 0
RS QQQ +=
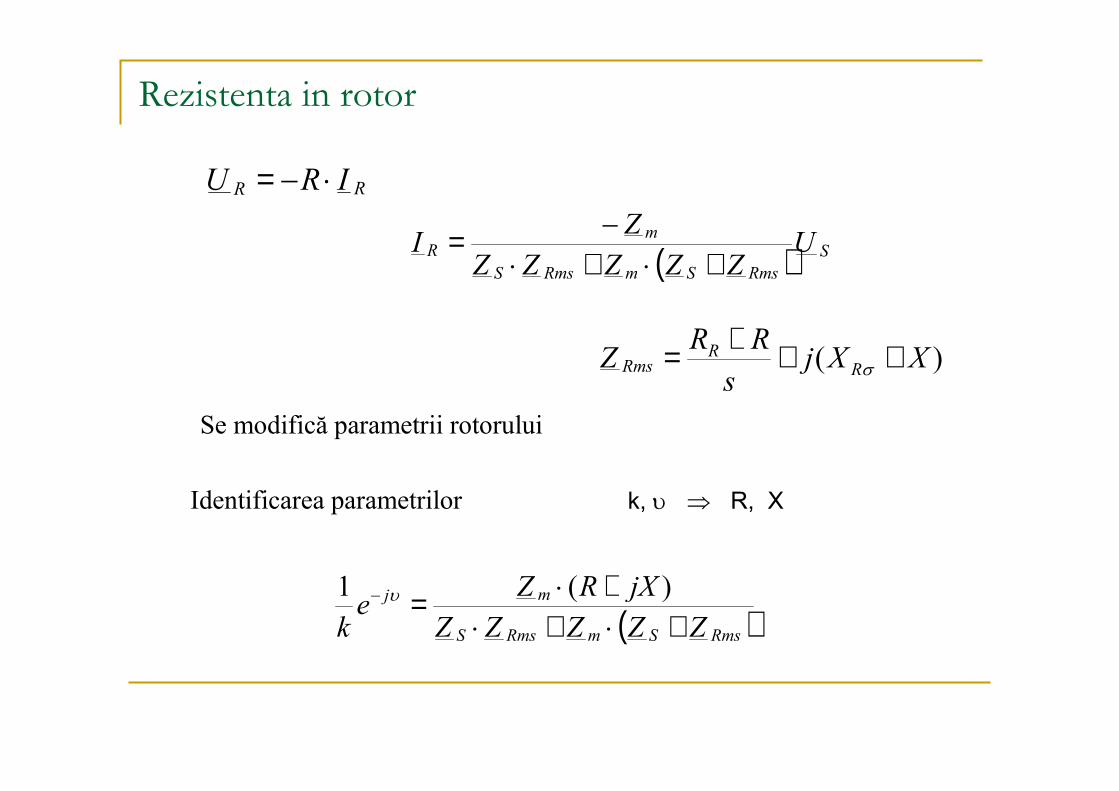
Rezistenta in rotor
RR IRU ⋅−=
( ) SRmsSmRmsS
mR U
ZZZZZZI
+⋅+⋅−=
)( XXjsRRZ R
RRms +++= σ
Se modifică parametrii rotorului
Identificarea parametrilor
( )RmsSmRmsS
mj
ZZZZZjXRZe
k +⋅+⋅+⋅=− )(1 υ
k, υ ⇒ R, X
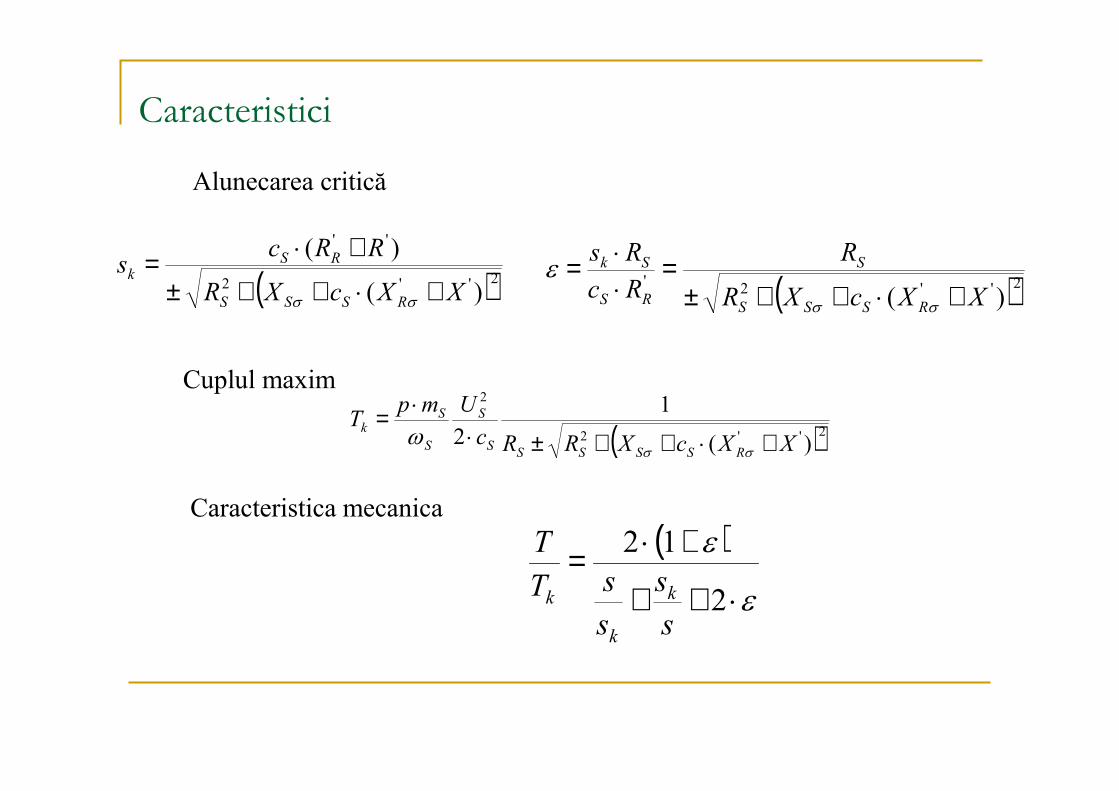
Caracteristici
( )2''2
''
)(
)(
XXcXR
RRcsRSSS
RSk
+⋅++±
+⋅=σσ
( )2''2
2
)(
12 XXcXRRcUmpT
RSSSSS
S
S
Sk
+⋅++±⋅⋅=
σσω
( )2''2')( XXcXR
RRcRs
RSSS
S
RS
Sk
+⋅++±=
⋅⋅=
σσ
ε
Alunecarea critică
Cuplul maxim
Caracteristica mecanica( )
ε
ε
⋅++
+⋅=2
12
ss
ssT
Tk
k
k
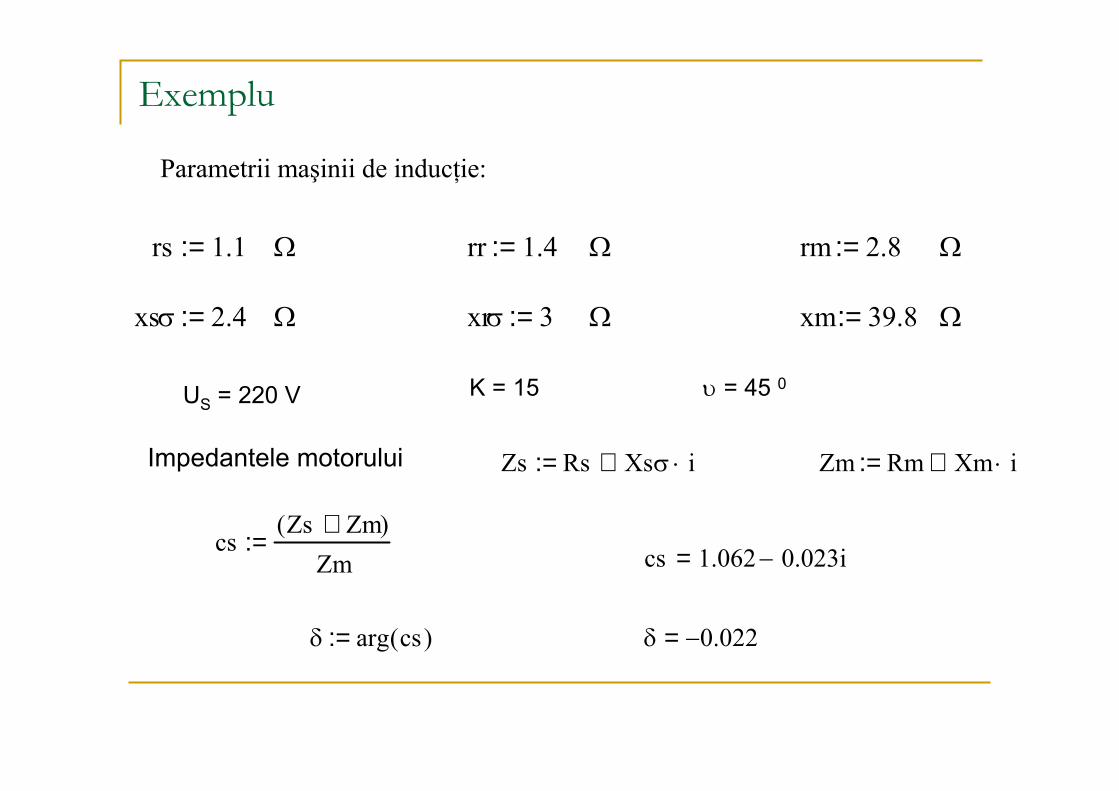
Exemplu
rs 1.1:= Ω rr 1.4:= Ω rm 2.8:= Ω
xsσ 2.4:= Ω xrσ 3:= Ω xm 39.8:= Ω
Parametrii maşinii de inducţie:
US = 220 V K = 15 υ = 45 0
Impedantele motorului Zs Rs Xsσ i⋅+:= Zm Rm Xm i⋅+:=
csZs Zm+( )
Zm:= cs 1.062 0.023i−=
δ arg cs( ):= δ 0.022−=
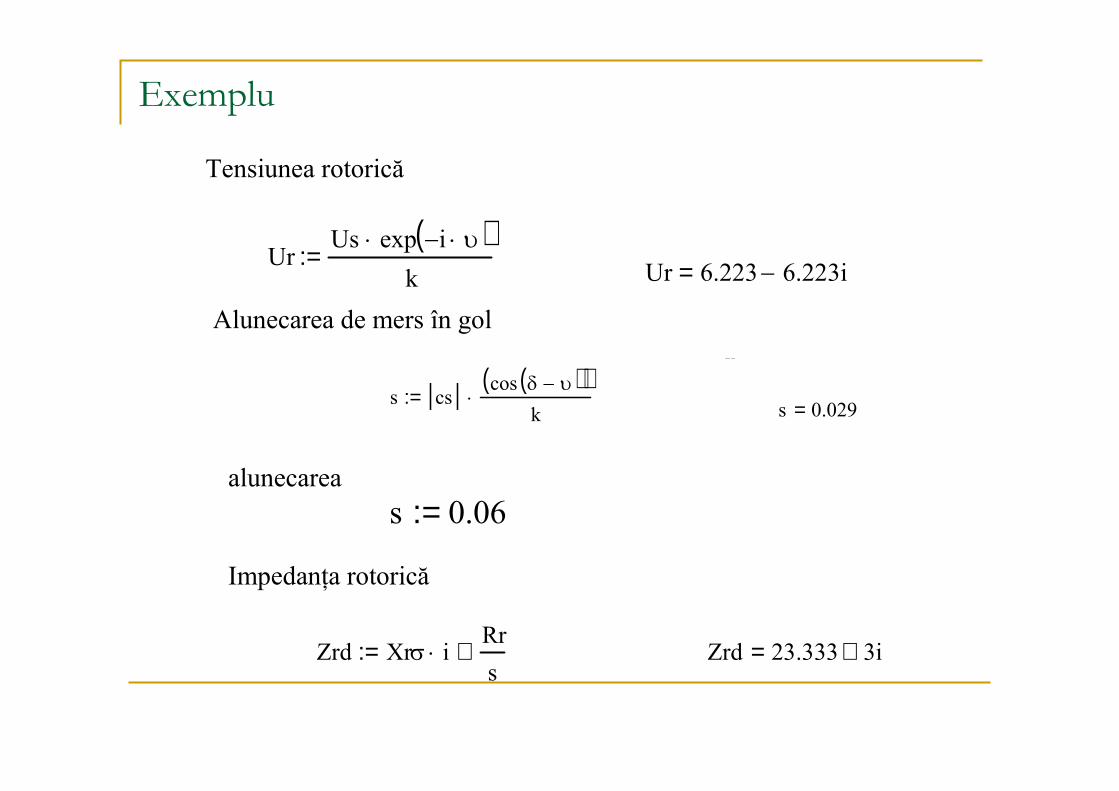
Exemplu
UrUs exp i− υ⋅( )⋅
k:= Ur 6.223 6.223i−=
k
s cscos δ υ−( )( )
k⋅:= s 0.029=
s 0.06:=
Tensiunea rotorică
Alunecarea de mers în gol
alunecarea
Zrd Xrσ i⋅Rrs
+:= Zrd 23.333 3i+=
Impedanţa rotorică
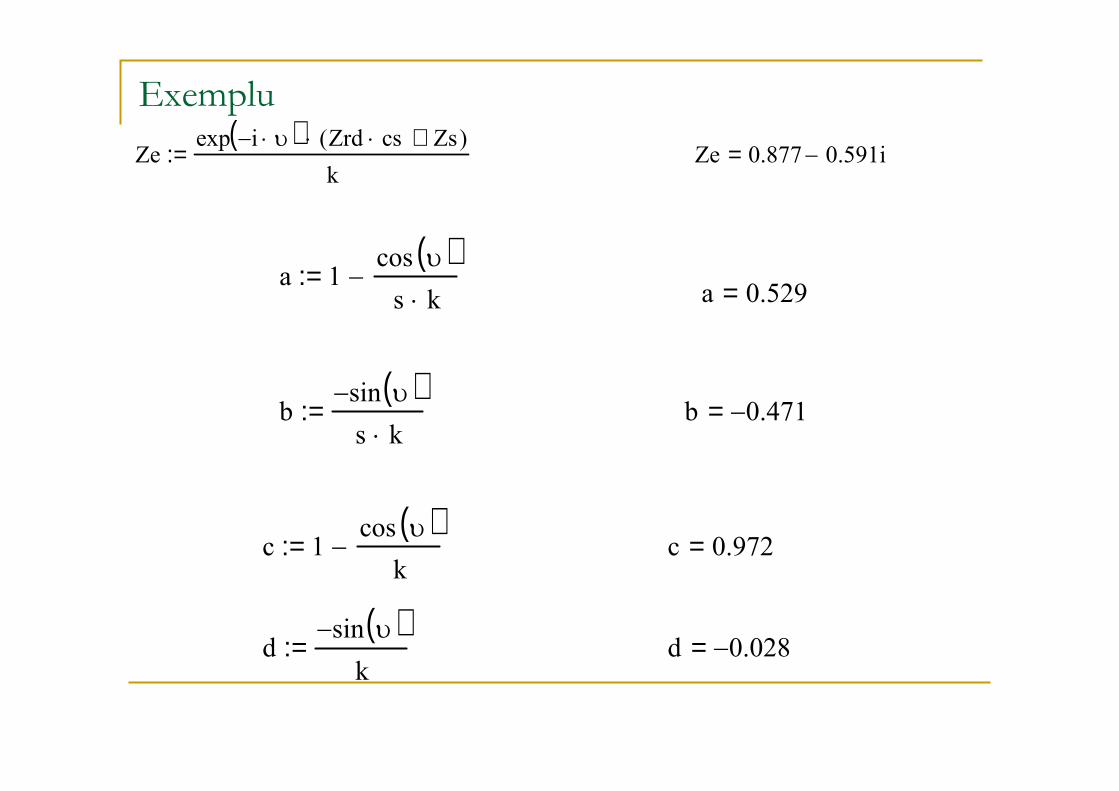
ExempluZe
exp i− υ⋅( ) Zrd cs⋅ Zs+( )⋅
k:= Ze 0.877 0.591i−=
a 1cos υ( )
s k⋅−:= a 0.529=
bsin υ( )−
s k⋅:= b 0.471−=
c 1cos υ( )
k−:= c 0.972=
dsin υ( )−
k:= d 0.028−=
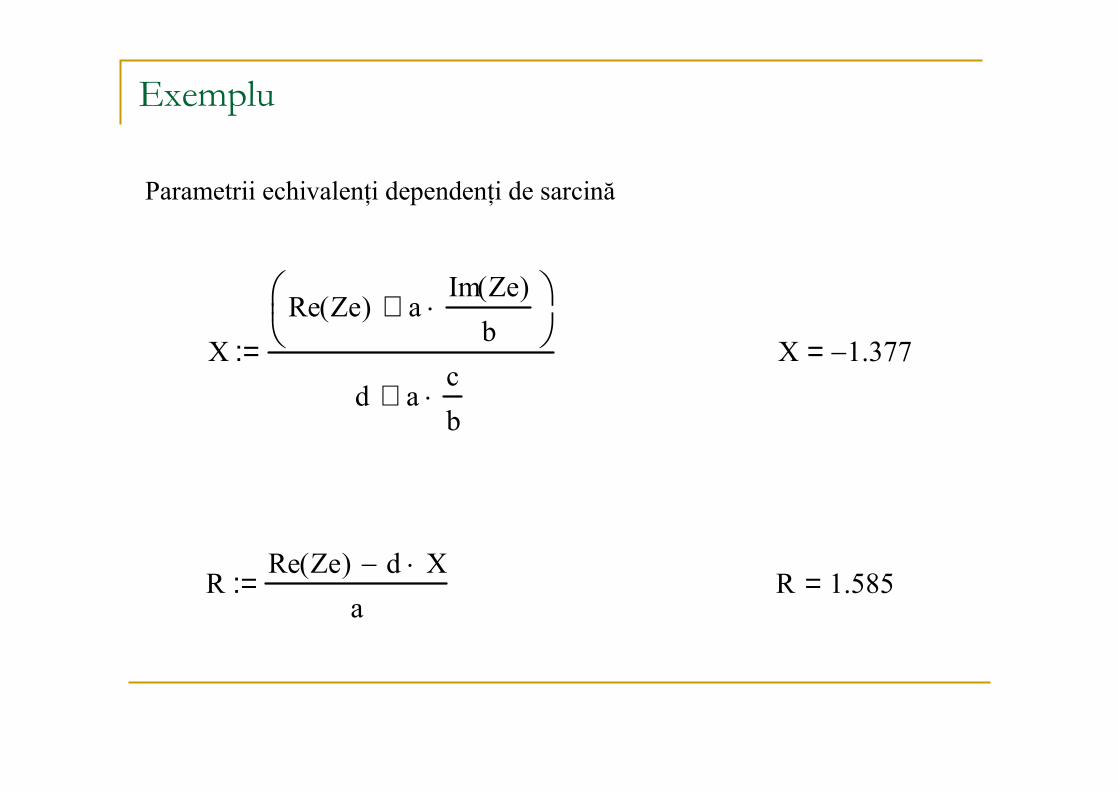
Exemplu
XRe Ze( ) a
Im Ze( )b
⋅+
d acb
⋅+:= X 1.377−=
RRe Ze( ) d X⋅−
a:= R 1.585=
Parametrii echivalenţi dependenţi de sarcină
Exemplu
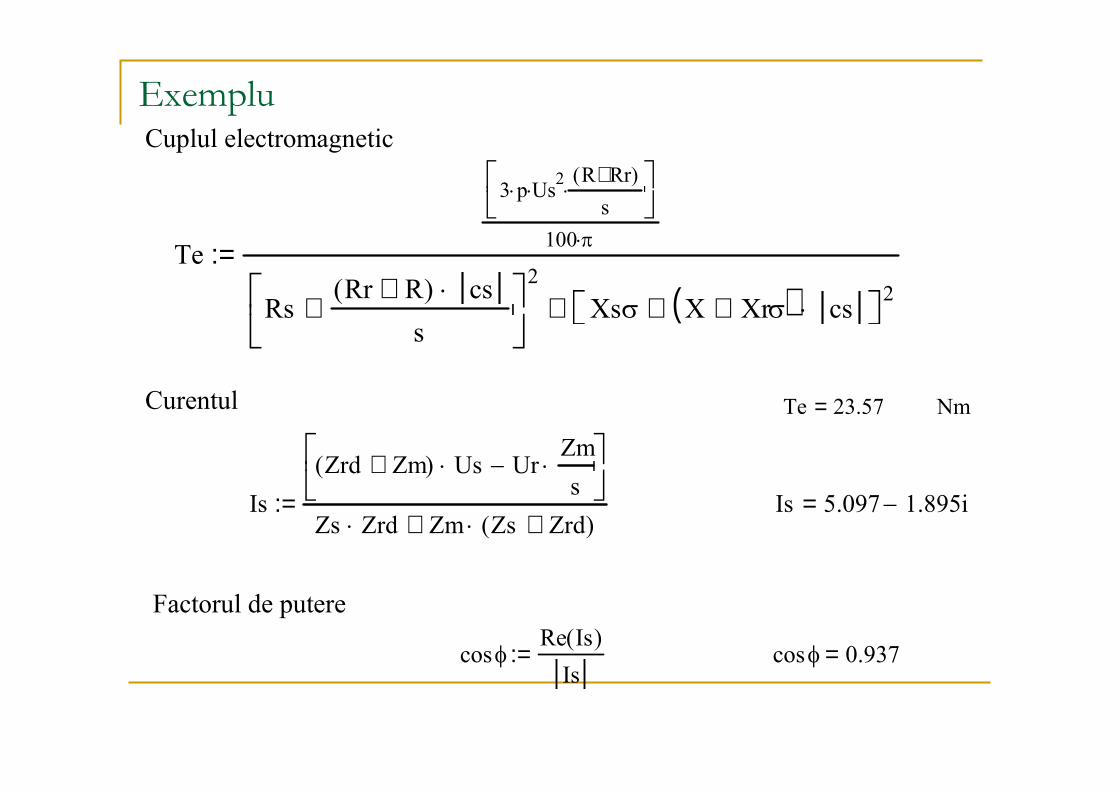
Te
3 p⋅ Us2⋅R Rr+( )
s⋅
100 π⋅
RsRr R+( ) cs⋅
s+
2Xsσ X Xrσ+( ) cs⋅+
2+
:=
Te 23.57= Nm
IsZrd Zm+( ) Us⋅ Ur
Zms
⋅−
Zs Zrd⋅ Zm Zs Zrd+( )⋅+:= Is 5.097 1.895i−=
Cuplul electromagnetic
Curentul
Factorul de putere
cosφRe Is( )
Is:= cosφ 0.937=
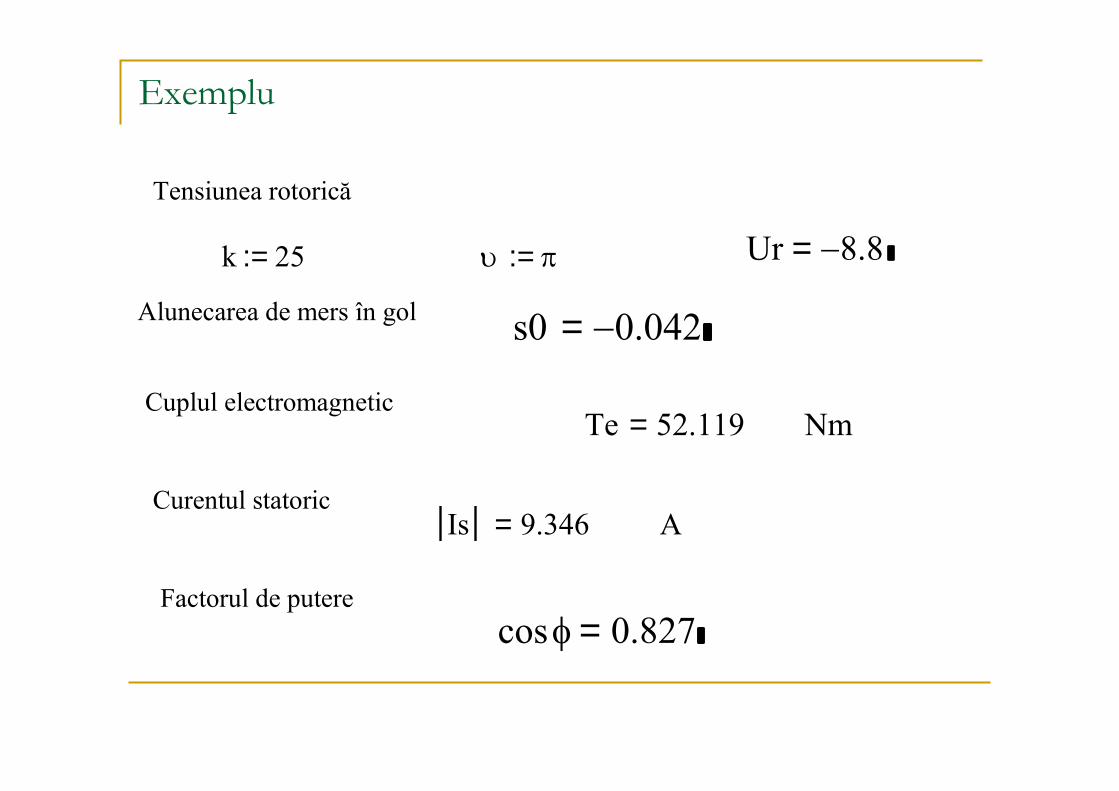
Exemplu
k 25:= υ π:= Ur 8.8−=
s0 0.042−=
Tensiunea rotorică
Alunecarea de mers în gol
Cuplul electromagnetic
Curentul statoric
Factorul de putere
Te 52.119= Nm
Is 9.346= A
cosφ 0.827=
Exemplu
s0 9.312 10 4−×=
Te 20.405= Nm
Is 11.441= A
Tensiunea rotorică
Alunecarea de mers în gol
Cuplul electromagnetic
Curentul statoric
Factorul de putere
Ur 8.8i= V
cosφ 0.254=
k 25:=υ
π−
2:=
υπ
2:= Ur 8.8i−= V
s0 9.312− 10 4−×=
Te 16.633= Nm
Is 3.564= A
cosφ 0.988=
Regimuri speciale ale maşiniide inducţie
Arbore electric
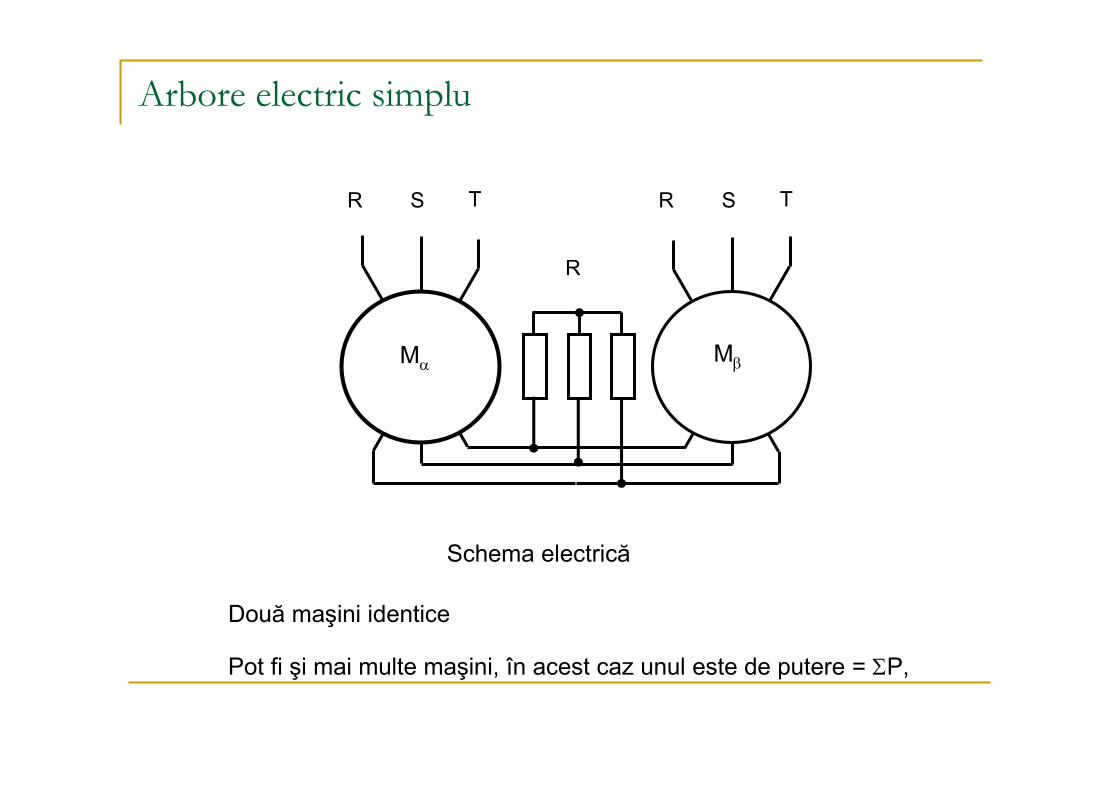
Arbore electric simplu
R
R S T R S T
Mα Mβ
Schema electrică
Două maşini identice
Pot fi şi mai multe maşini, în acest caz unul este de putere = ΣP,
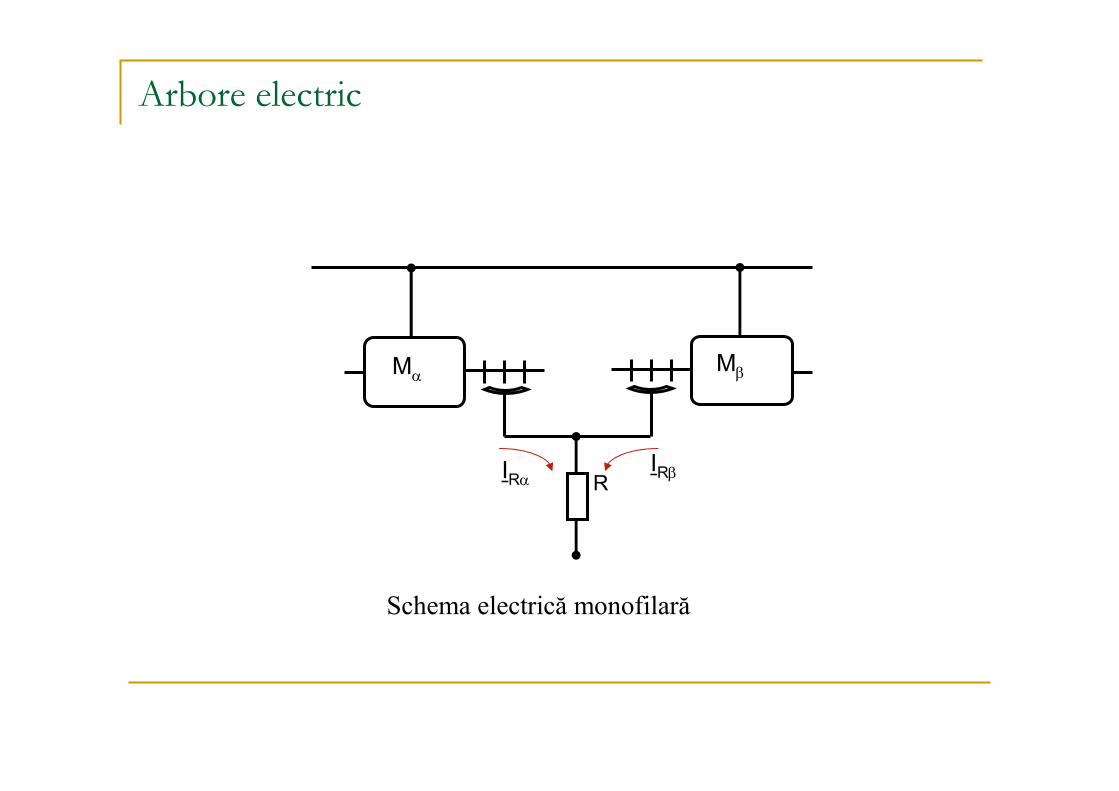
Arbore electric
R
Mα Mβ
Schema electrică monofilară
IRαIRβ
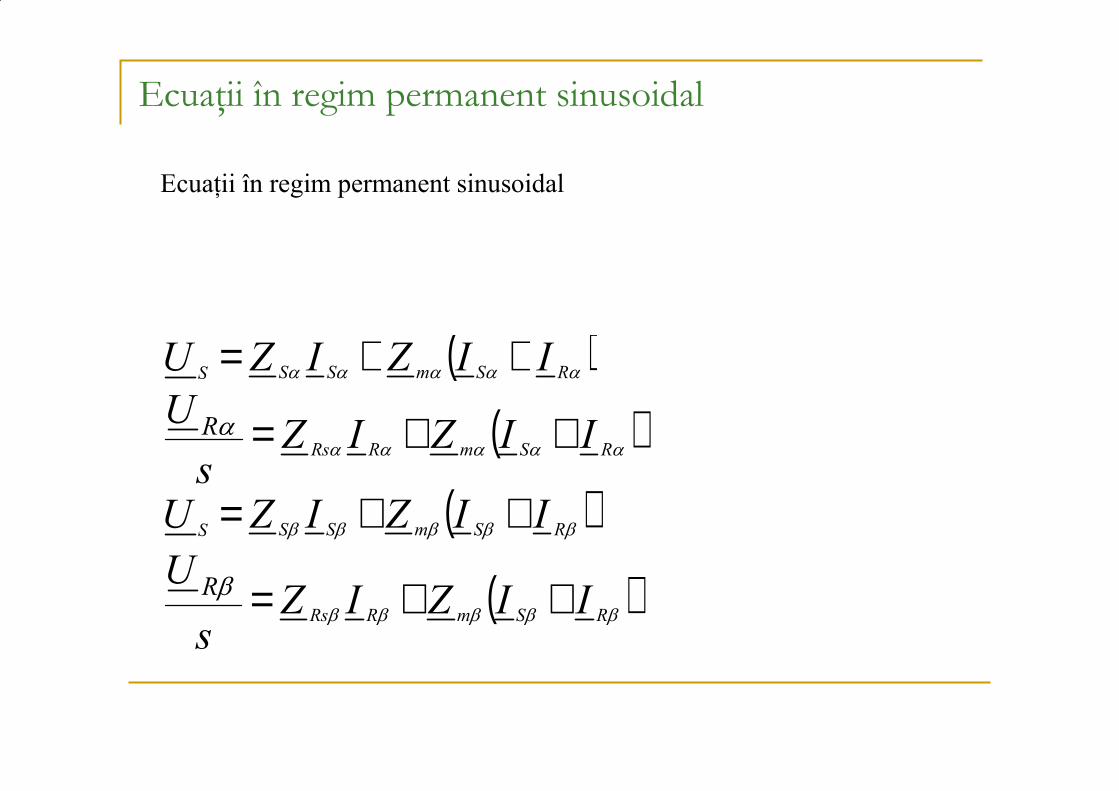
Ecuaţii în regim permanent sinusoidal
( )( )
( )
( )βββββ
βββββ
ααααα
ααααα
β
α
RSmRRs
RSmSSS
RSmRRs
RSmSSS
IIZIZsU
IIZIZU
IIZIZs
UIIZIZU
R
R
++=
++=
++=
++=
Ecuaţii în regim permanent sinusoidal
EZ
E
σXRZ
EZ−=Ecuaţiilearboreluielectric:
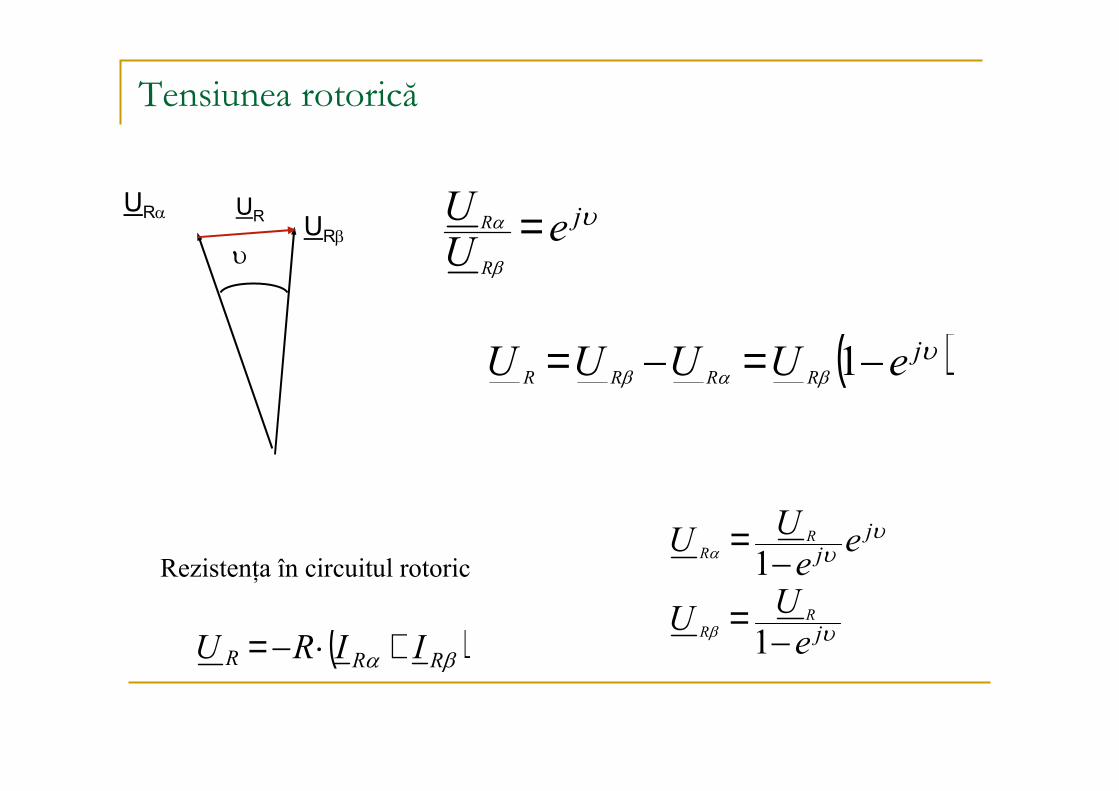
Tensiunea rotorică
( )βα RRR IIRU +⋅−=
URα
υURβ
υ
β
α jeUU
R
R =
υ
υυ
β
α
j
jj
eUU
eeUU
RR
RR
−=
−=
1
1
UR
( )υβαβ
jeUUUU RRRR −=−= 1
Rezistenţa în circuitul rotoric
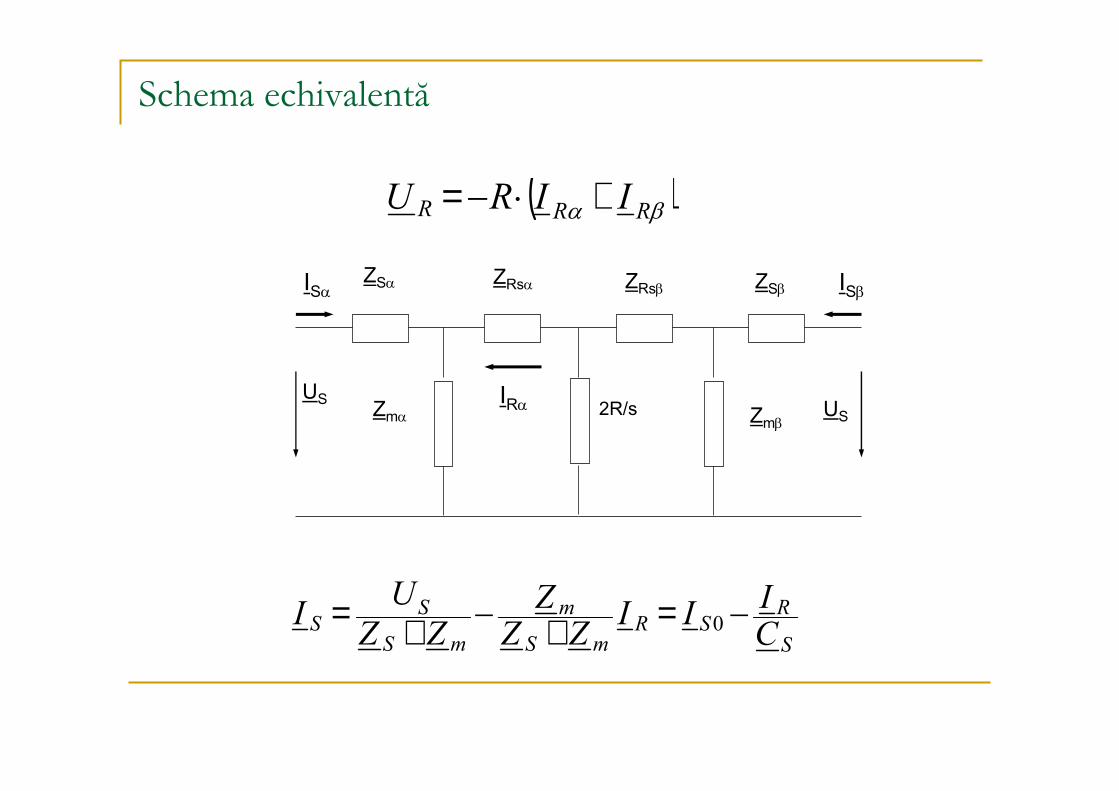
Schema echivalentă
( )βα RRR IIRU +⋅−=
S
RSR
mS
m
mS
SS C
IIIZZZ
ZZUI −=+−+= 0
US US2R/s
ZSα ZRsα ZRsβ ZSβ
Zmα Zmβ
ISα ISβ
IRα
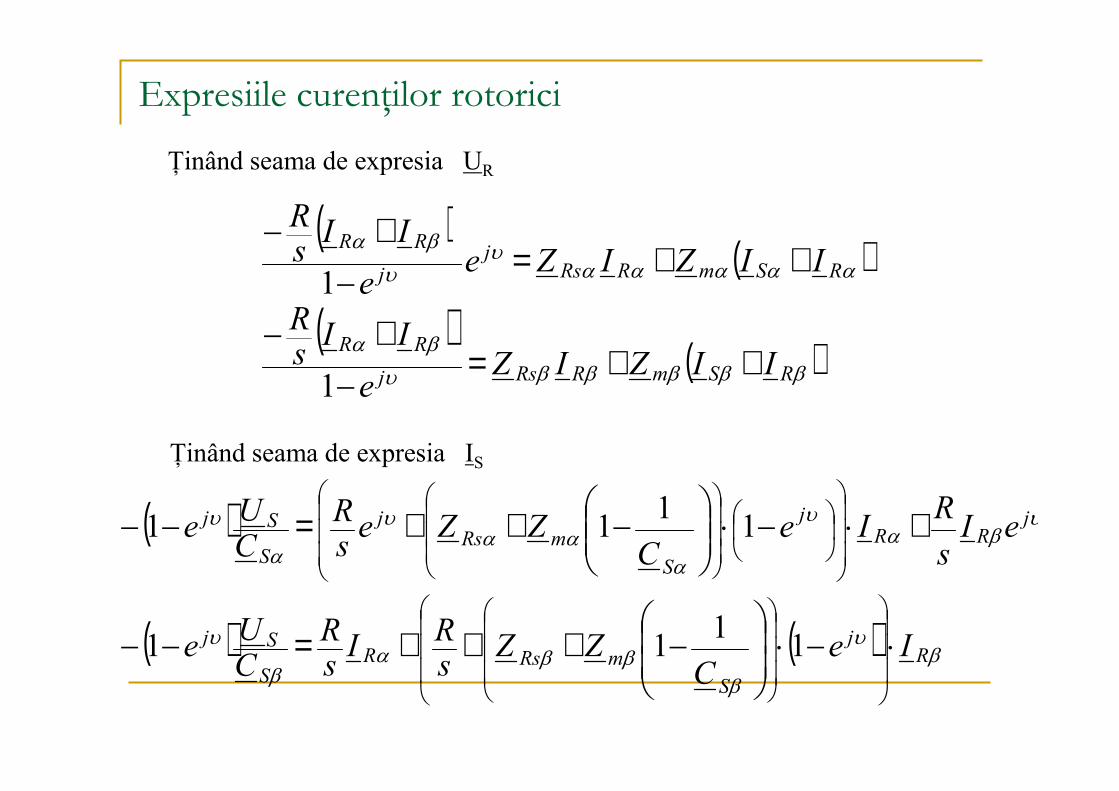
Expresiile curenţilor rotorici
( )( )
( )( )βββββυ
βα
αααααυ
υβα
RSmRRsjRR
RSmRRsj
jRR
IIZIZeIIs
R
IIZIZeeIIs
R
++=−
+−
++=−
+−
1
1
( )
( ) ( ) βυ
βββα
β
υ
υβα
υ
ααα
υ
α
υ
Rj
SmRsR
S
Sj
jRR
j
SmRs
j
S
Sj
IeC
ZZsRIs
RCUe
eIsRIe
CZZes
RCUe
⋅−⋅
−+++=−−
+⋅−⋅
−++=−−
1111
1111
Ţinând seama de expresia UR
Ţinând seama de expresia IS
Expresia curentului rotoric
mS
mSR
RscR
SmRs ZZ
ZZjXsRZ
CZZ
+⋅++==
−+ σα
ααα
11
( )
( ) ( ) βυ
αυ
υβα
υυυ
Rj
scRRS
Sj
jRR
jscR
j
S
Sj
IeZsRIs
RCUe
eIsRIeZes
RCUe
⋅−⋅++=−−
+⋅−⋅+=−−
11
11
( ) υυυυ jjscR
jscR
j eeZsReZes
RsR
⋅
−−⋅+⋅−⋅+=2
11∆∆∆∆
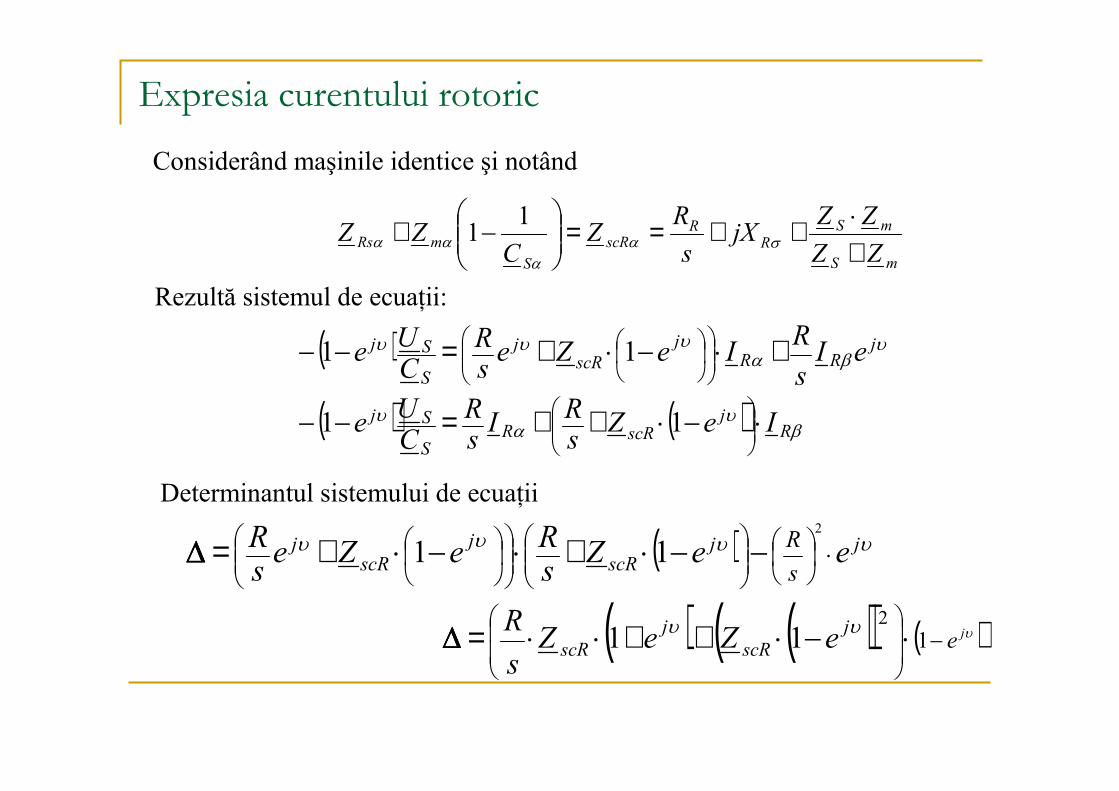
Considerând maşinile identice şi notând
Rezultă sistemul de ecuaţii:
( ) ( )( ) ( )υυυ jejscR
jscR eZeZ
sR
−
⋅−⋅++⋅⋅= 1
211∆∆∆∆
Determinantul sistemului de ecuaţii

Cuplul electromagnetic
( ) ( )
−
−⋅+⋅−−= υυυ jj
scRS
Sj
RI
esReZ
sR
CUe 11∆∆∆∆
scR
scR
S
S
scRj
j
scR
scR
S
SR
ZsRj
ZsR
CU
ZeeZ
sR
ZsR
CUI
+−
+⋅=
+−+
+=
υυ
υ
υα
cos1sin
1
11 2
0** 33
SRmmSRmm IIXpIIXpT ⋅ℑ⋅⋅=⋅ℑ⋅
⋅=ωωα
Curentul din rotor
Cuplul electromagnetic
( )2
2
22
cos1sin
cos1sin1
S
S
scRescRm
scRmscR
escRescR
m
CU
ZsRZ
sRZ
ZsRZ
ZsR
Tℜ+
−+ℑ
−+ℑ⋅
⋅ℜ+−ℜ⋅
⋅ℑ
=
υυ
υυ
α
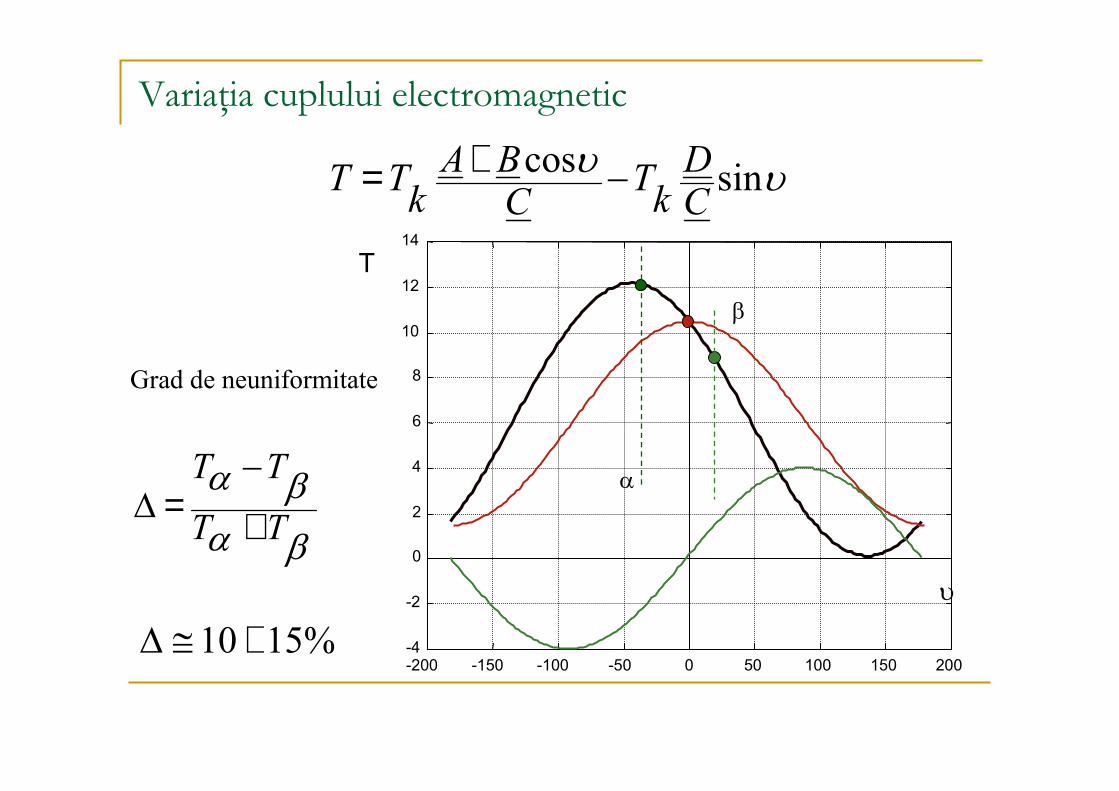
Variaţia cuplului electromagnetic
υυ sincosCD
kTCBA
kTT −+=
υ
T
-200 -150 -100 -50 0 50 100 150 200-4
-2
0
2
4
6
8
10
12
14
βαβαTT
TT
+
−=∆
Grad de neuniformitate
β
α
%1510 ÷≅∆
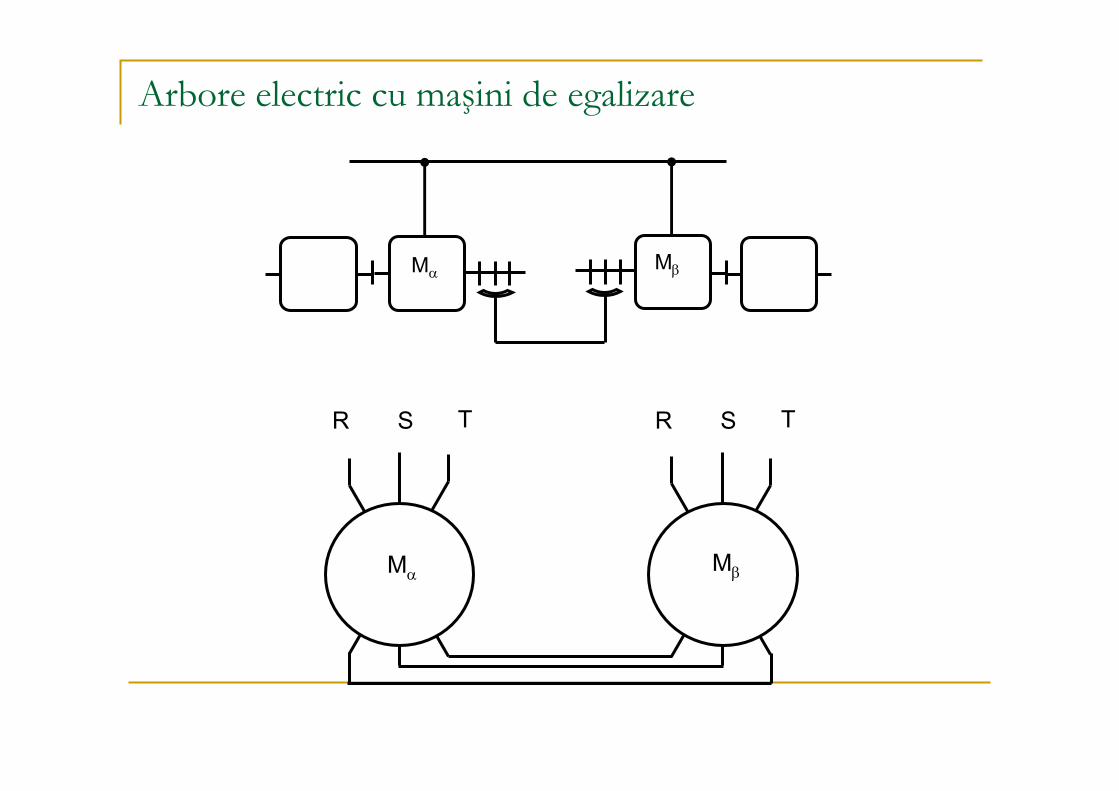
Arbore electric cu maşini de egalizare
Mα Mβ
R S T R S T
Mα Mβ
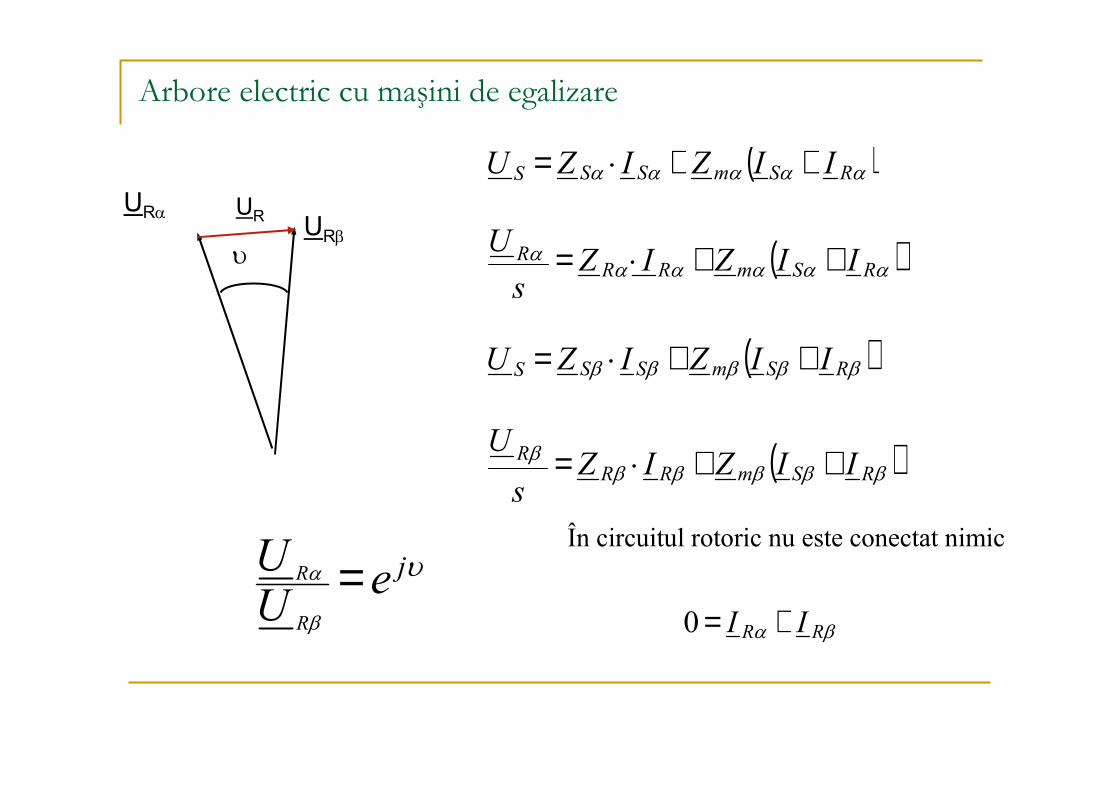
Arbore electric cu maşini de egalizare
( )
( )
( )
( )ββββββ
βββββ
αααααα
ααααα
RSmRRR
RSmSSS
RSmRRR
RSmSSS
IIZIZsU
IIZIZU
IIZIZs
U
IIZIZU
++⋅=
++⋅=
++⋅=
++⋅=
βα RR II +=0
URα
υURβ
UR
În circuitul rotoric nu este conectat nimicυ
β
α jeUU
R
R =
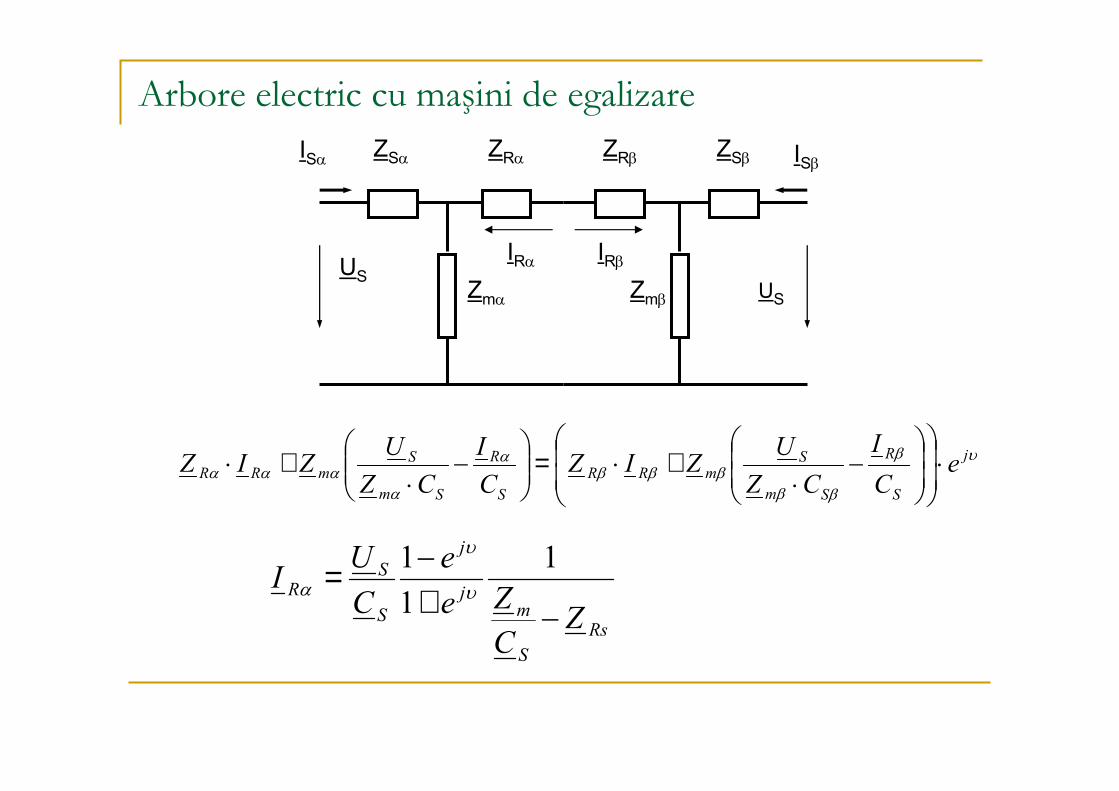
Arbore electric cu maşini de egalizare
υβ
βββββ
α
αααα
j
S
R
Sm
SmRR
S
R
Sm
SmRR e
CI
CZUZIZ
CI
CZUZIZ ⋅
−
⋅+⋅=
−
⋅+⋅
RsS
mj
j
S
SR
ZCZe
eCUI
−+−= 1
11
υ
υ
α
ZmβZmα
USUS
ZSα ZRα ZRβ ZSβISα ISβ
IRα IRβ
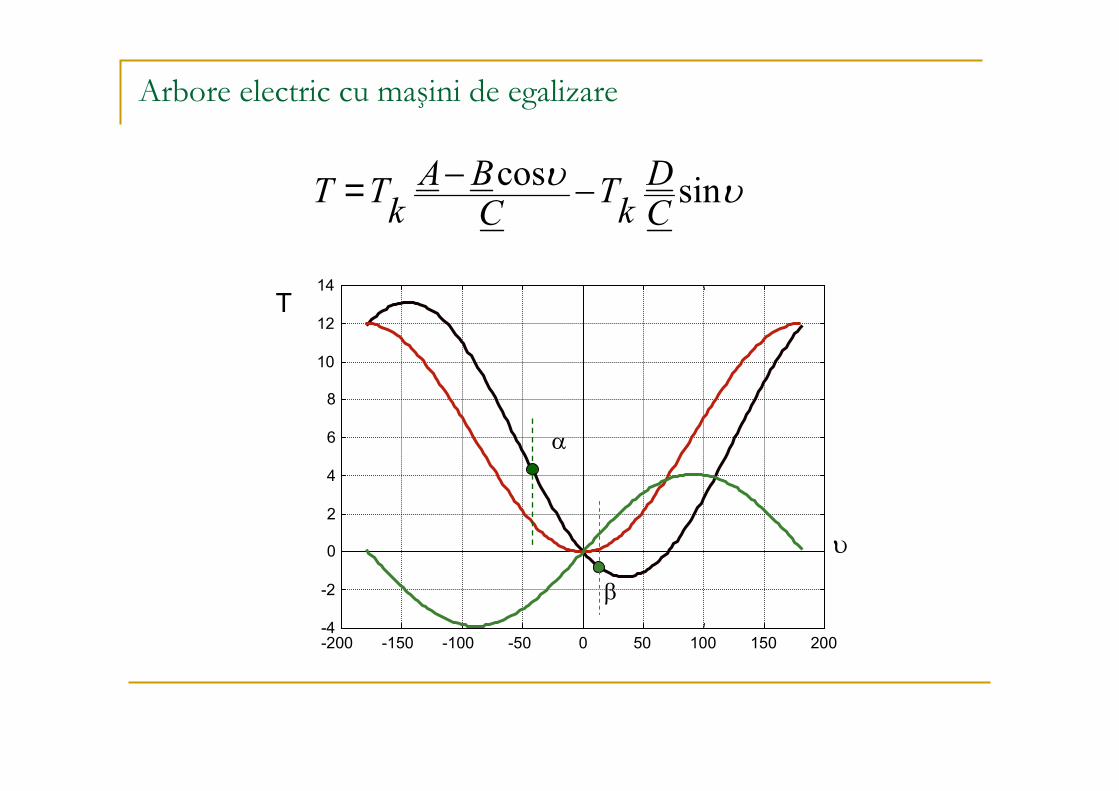
Arbore electric cu maşini de egalizare
υ
T
-200 -150 -100 -50 0 50 100 150 200-4
-2
0
2
4
6
8
10
12
14
υυ sincosCD
kTCBA
kTT −−=
α
β
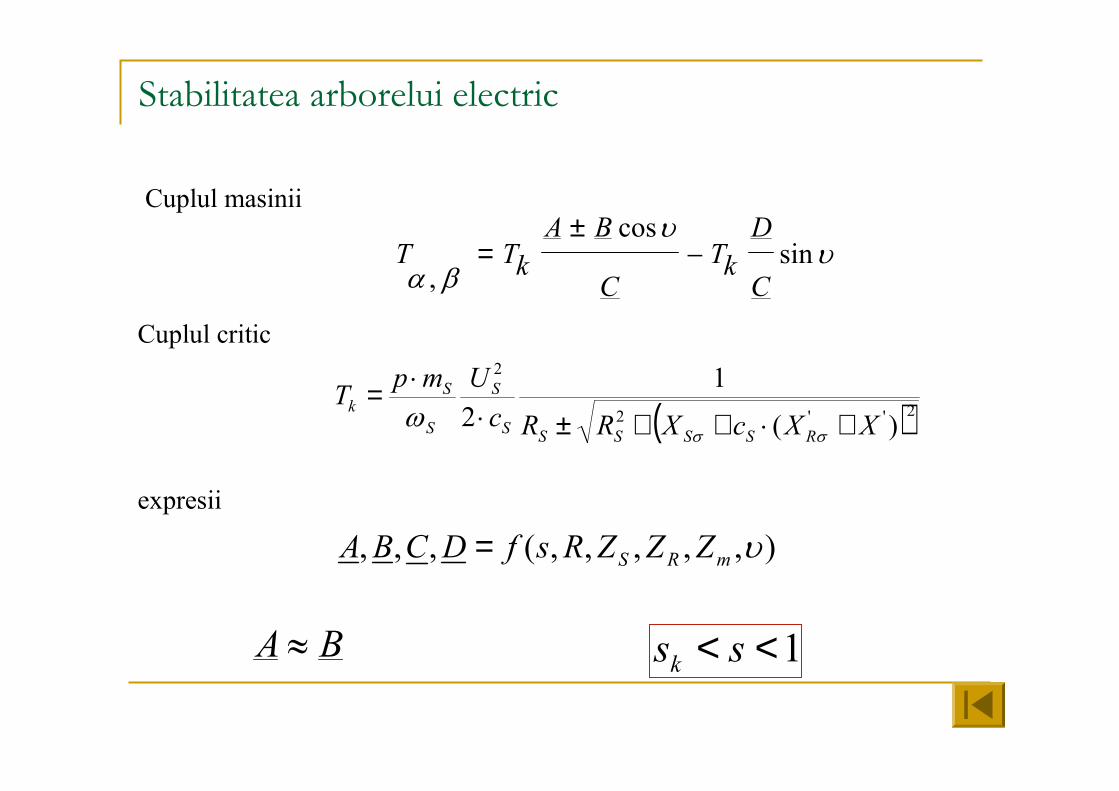
Stabilitatea arborelui electric
υυ
βαsin
cos
, C
DkT
C
BAkTT −
±=
( )2''2
2
)(
12 XXcXRRcUmpT
RSSSSS
S
S
Sk
+⋅++±⋅⋅=
σσω
),,,,,(,,, υmRS ZZZRsfDCBA =
BA ≈ 1<< ssk
Cuplul masinii
Cuplul critic
expresii
Regimuri speciale ale maşiniide inducţie
Regulator de inducţie.Bobină variabilăSchimbător de frecvenţă
Definirea regimului special
bRR
bSS
kwkwk⋅⋅=
pπ±
Maşina de inducţie cu rotor bobinat
Viteza de rotaţie n = 0
Rotorul este blocat cu ajutorul unui dispozitiv,care permite rotirea rotorului cu
Raportul de transformare apropiat de unitate
RS ff =
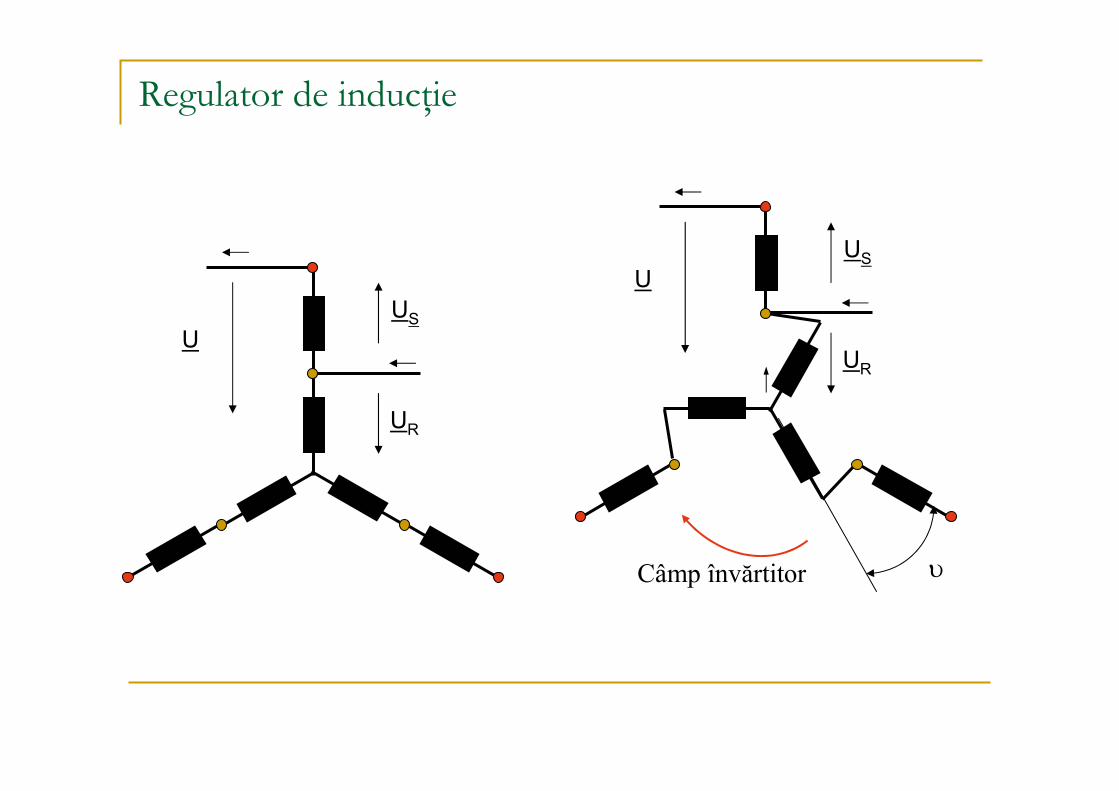
Regulator de inducţie
UR
UUS
UR
UUS
υCâmp învărtitor
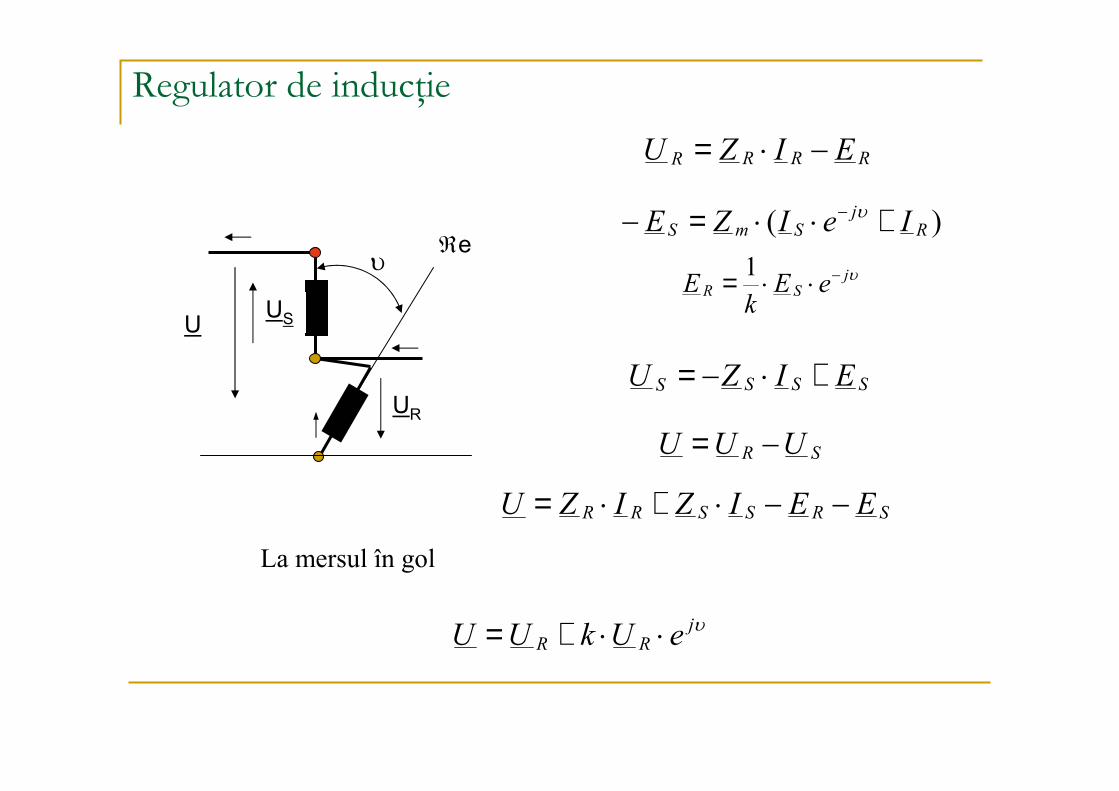
Regulator de inducţie
)( Rj
SmS IeIZE +⋅⋅=− − υ
RRRR EIZU −⋅=
SR UUU −=UR
U US
υ υjSR eE
kE −⋅⋅= 1
La mersul în gol
ℜe
SSSS EIZU +⋅−=
υjRR eUkUU ⋅⋅+=
SRSSRR EEIZIZU −−⋅+⋅=
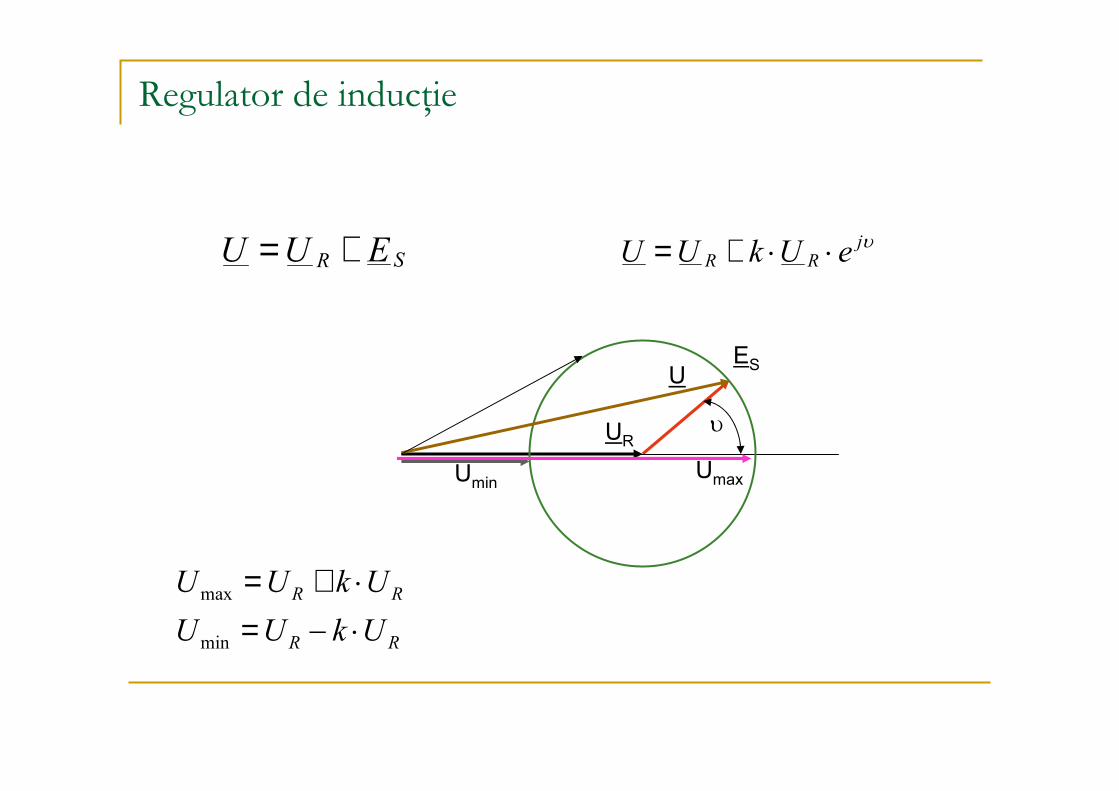
Regulator de inducţie
υjRR eUkUU ⋅⋅+=
υUR
ESU
Umin Umax
SR EUU +=
RR
RR
UkUUUkUU
⋅−=⋅+=
min
max

Regulator de inducţie
UR U
ES
ν
Regulator de inducţie dublu
Tensiunea nu-şi schimbă faza
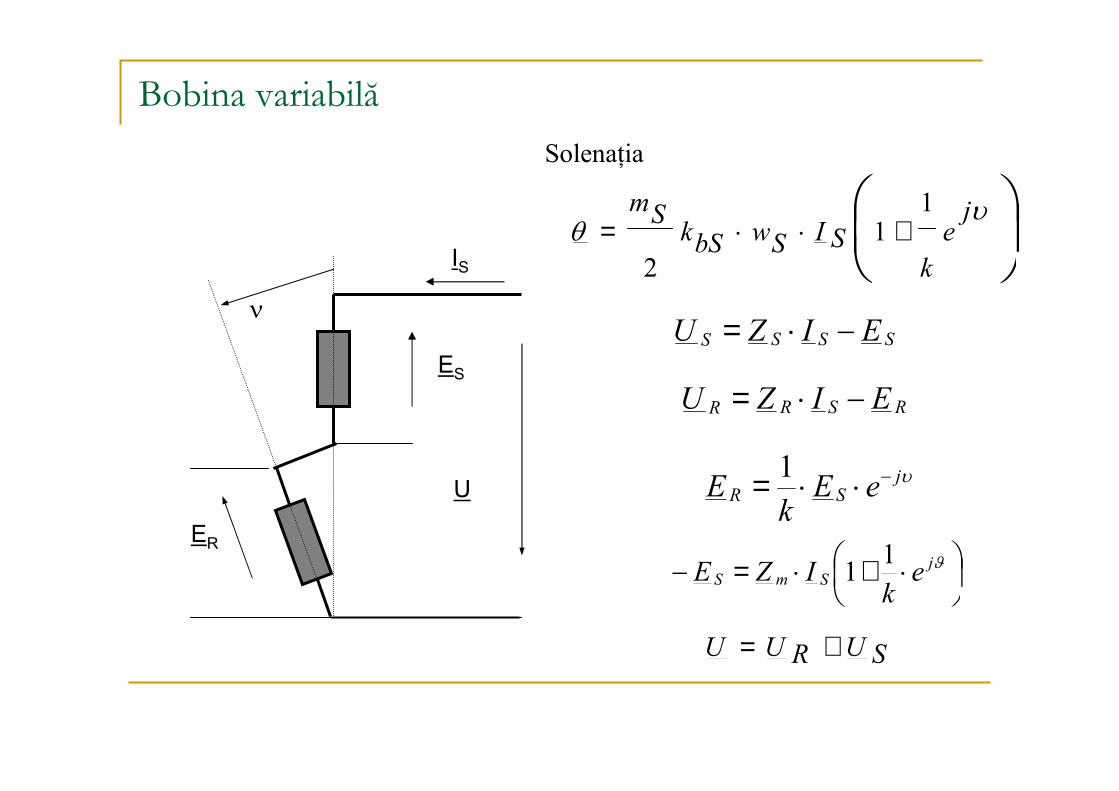
Bobina variabilă
RSRR EIZU −⋅=
SSSS EIZU −⋅=
υjSR eE
kE −⋅⋅= 1
IS
ER
ν
ES
U
+⋅⋅=υ
θje
kSISwbSk
Sm 11
2
SURUU +=
Solenaţia
⋅+⋅=− ϑjSmS e
kIZE 11
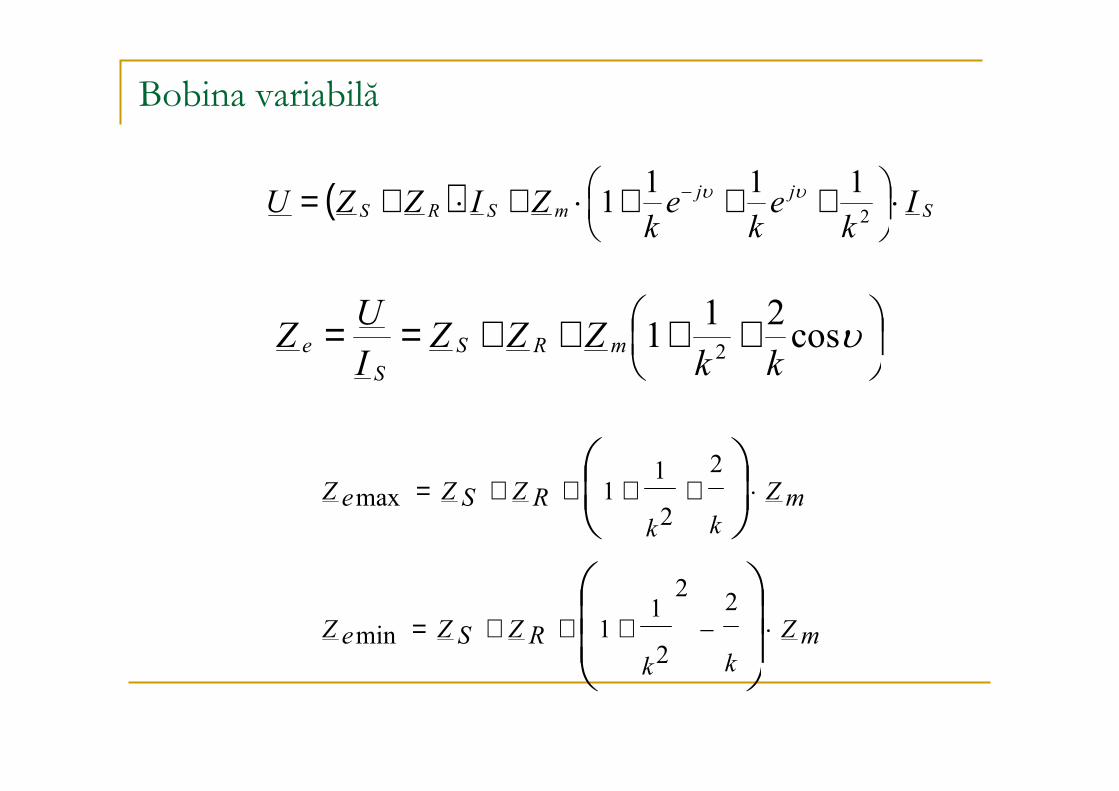
Bobina variabilă
( ) Sjj
mSRS Ik
ek
ek
ZIZZU ⋅
+++⋅+⋅+= −
21111 υυ
mZkk
RZSZeZ
mZkk
RZSZeZ
⋅−+++=
⋅++++=
22
2
11min
2
2
11max
++++== υcos211 2 kk
ZZZIUZ mRSS
e
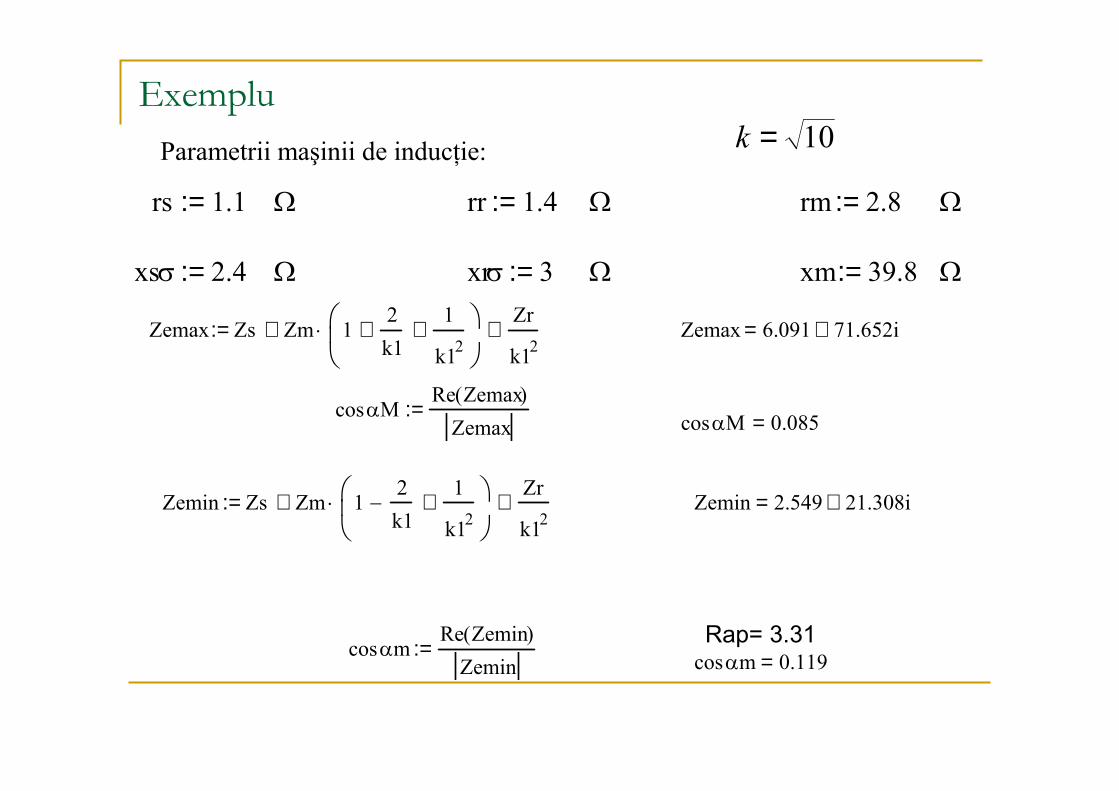
Exemplu10=k
rs 1.1:= Ω rr 1.4:= Ω rm 2.8:= Ω
xsσ 2.4:= Ω xrσ 3:= Ω xm 39.8:= Ω
Parametrii maşinii de inducţie:
Zemax Zs Zm 12k1
+1
k12+
⋅+Zr
k12+:= Zemax 6.091 71.652i+=
cosαMRe Zemax( )
Zemax:= cosαM 0.085=
Zemin Zs Zm 12k1
−1
k12+
⋅+Zr
k12+:= Zemin 2.549 21.308i+=
cosαmRe Zemin( )
Zemin:= cosαm 0.119=
Rap= 3.31
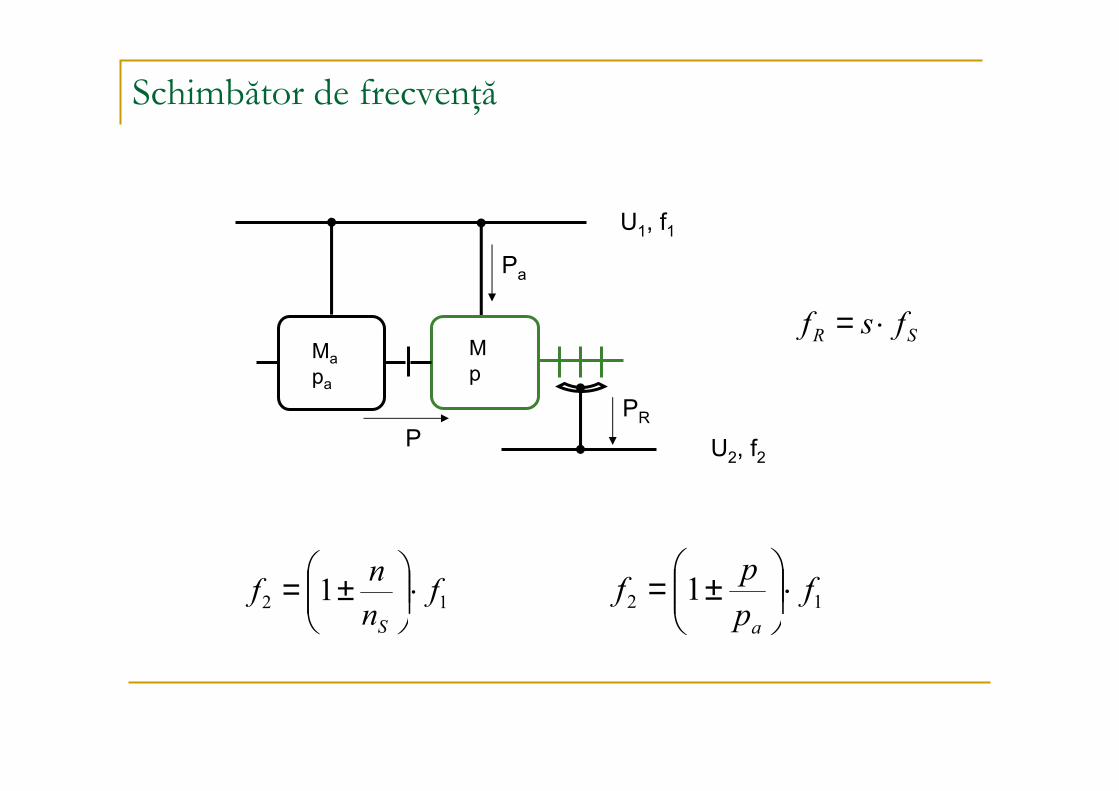
Schimbător de frecvenţă
SR fsf ⋅=
12 1 fnnfS
⋅
±=
Pa
PRP
Mp
Mapa
U1, f1
U2, f2
12 1 fppfa
⋅
±=
Schimbător de frecvenţă
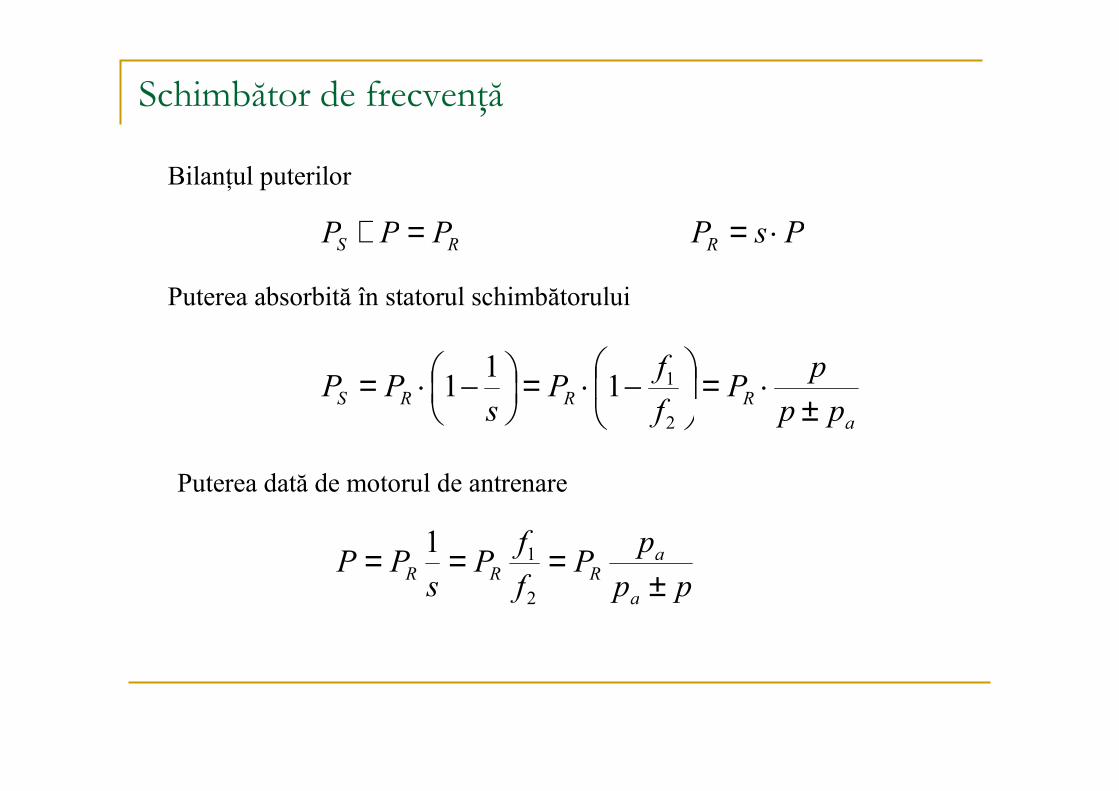
RS PPP =+ PsPR ⋅=
aRRRS pp
pPffP
sPP
±⋅=
−⋅=
−⋅=
2
1111
Bilanţul puterilor
Puterea absorbită în statorul schimbătorului
Puterea dată de motorul de antrenare
pppP
ffP
sPP
a
aRRR ±
===2
11

Exemplu
21000
30001000−≅
−≅s Hzfsf 10012 ≈⋅=
RRRRS PPPs
PP23
133
21111 =
−⋅=
−−⋅=
−⋅=
Motor de antrenare Pa = 1.5 kW pa =1
Masina de inductie cu rotor bobinat P=3 kW p=3
Neglijand alunecarea motorului de antrenare n≅3000 rot/min
-rotorul se roteste in sensul campului invirtitor statoric
RRRR PPPs
PP21
311
211
−=−
=−
==
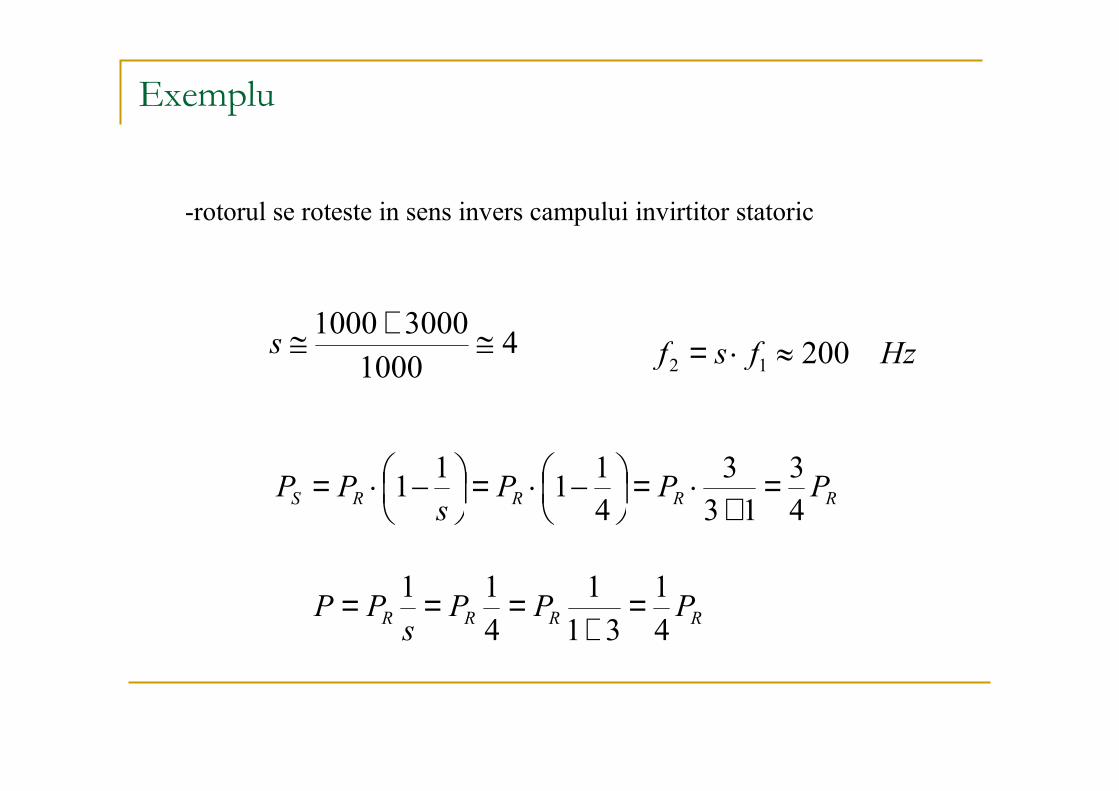
Exemplu
41000
30001000≅
+≅s Hzfsf 20012 ≈⋅=
RRRRS PPPs
PP43
133
41111 =
+⋅=
−⋅=
−⋅=
-rotorul se roteste in sens invers campului invirtitor statoric
RRRR PPPs
PP41
311
411 =
+===
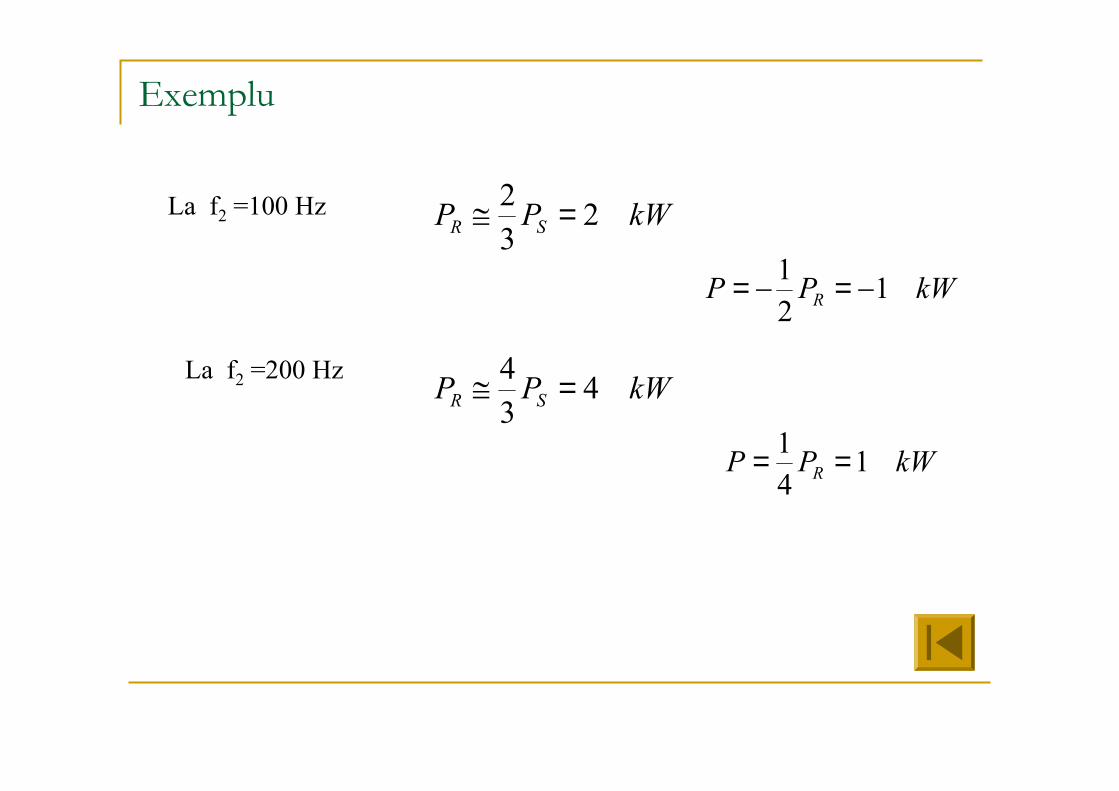
Exemplu
kWPP SR 232 =≅La f2 =100 Hz
La f2 =200 Hz
kWPP R 121
−=−=
kWPP SR 434 =≅
kWPP R 141 ==
Recommended







![Slide Nr[1]. 9 Regimuri Speciale](https://img.pdfslide.tips/doc/110x75/577d22821a28ab4e1e978fbe/slide-nr1-9-regimuri-speciale.jpg)









