PERANCANGAN MODEL MATERIAL HANDLING CRANE
SEBAGAI MEDIA PEMBELAJARAN OTOMASI INDUSTRI
DENGAN PENDEKATAN RAPID PROTOTYPING
Disusun sebagai salah satu syarat Memmenyelesaikan Program Studi Strata I pada
Jurusan Teknik Industri Fakultas Teknik
Oleh:
ARIF REZA BASIRUN
D 600 150 028
PROGRAM STUDI TEKNIK INDUSTRI
FAKULTAS TEKNIK
UNIVERSITAS MUHAMMADIYAH SURAKARTA
2019

1
PERANCANGAN MODEL MATERIAL HANDLING CRANE
SEBAGAI MEDIA PEMBELAJARAN OTOMASI INDUSTRI
DENGAN PENDEKATAN RAPID PROTOTYPING
Abstrak
Teknologi sistem kontrol telah sangat berkembang dimana metode konvensional
berganti kearah otomasi terutama pada suatu proses perpindahan material yang berulang-
ulang. Hal ini disebabkan terbatasnya kemampuan manusia untuk melakukan proses yang
berlangsung secara berulang-ulang. Crane merupakan salah satu jenis material handling
yang sangat sering digunakan untuk menggantikan fungsi manusia dalam proses
perpindahan barang yang berulang-ulang. Tujuan dari penelitian ini ialah merancang
konstruksi, sistem gerak dan sistem kontrol pada model material handling crane
otomatis, dimana dalam pembuatan menggunakan pendekatan rapid prototyping serta
membuat rancangan yang mampu memenuhi kriteria kelayakan sehingga alat dapat
dibuat. Pada penelitian ini proses perancangan diawali dengan proses benchmarking
untuk memperoleh gambaran rancangan serta pendekatan rapid prototyping agar
nantinya proses produksi lebih cepat. Hasil dari penelitian ini menghasilkan sebuah
rancangan trainer kit model material handling crane dengan sistem gerak menggunakan
motor stepper dan motor servo, serta sistem kontrol diatur oleh Arduino mega. Rancangan
dinyatakan layak untuk dilanjutkan pada proses pembuatan setelah memenuhi kriteria di
pengujian. Penelitian ini hanya sebatas sampai pada perancagan dan tidak seluruh part
dapat dibuat dengan teknik rapid prototyping.
Kata Kunci: Sistem Kontrol, Otomasi, Material handling crane, Perancangan,
Benchmarking, Rapid prototyping
Abstract
Control system technology has been highly developed where conventional methods
change towards automation, especially in a process of repetitive material transfer. This is
due to the limited ability of humans to carry out repetitive processes. Crane is one type
of material handling that is very often used to replace human functions in the process of
repetitive repetition of goods. The purpose of this study is to design a construction, motion
system and control system in an automatic material handling crane model, wherein the
manufacture uses a rapid prototyping approach and makes a design that is able to meet
the eligibility criteria so that tools can be made. In this study the design process begins
with a benchmarking process to obtain a description of the design and rapid prototyping
approach so that the production process will be faster. The results of this study produced
a material handling crane model trainer kit with a motion system using a stepper motor
and servo motor, and a control system regulated by Arduino Mega. The design is declared
feasible to continue in the manufacturing process after fulfilling the criteria tested. This
research is only limited to designation and not all parts can be made using rapid
prototyping techniques.
Keywords: Control Systems, Automation, Material handling cranes, Design,
Benchmarking, Rapid prototyping
1. PENDAHULUAN
Perkembangan teknologi pada sistem kontrol setiap tahunnya selalu berkembang secara pesat. Salah
satunya perkembangan mengambil alih metode konvensional untuk menyelesaikan suatu proses
terutama pada proses yang berulang, dimana kemampuan manusia untuk mampu menangani tugas
2
yang berulang-ulang pada perpindahan material sangatlah terbatas, sehingga memerlukan teknologi
kontrol yang komputerisasi untuk mampu menangani tugas yang berulang secara lebih cepat dan
efisien (Asnawi, 2008).
Material handling adalah satu jenis transportasi pengangkutan yang bersifat common use pada
sebuah perusahaan yang digunakan untuk proses memindahkan bahan baku, barang setengah jadi,
maupun barang jadi dari tempat asal ke tempat tujuan yang telah ditetapkan. Peralatan material
handling sendiri sangatlah banyak, salah satunya yaitu crane. Crane merupakan salah satu alat yang
digunakan untuk memindahkan material.
Potitioning pada perancangan dan pengembangan produk trainer kit model material handling
crane dilakukan berdasar 3 penelitian yang telah ada sebelumnya, diantaranya penelitian tentang
miniatur crane otomatis berbasis PLC OMRON CPM 1A, kemudian penelitian tentang
pengembangan teknologi rapid prototyping untuk pembuatan produk-produk multi material dan
yang terakhir tentang sistem kontrol motor stepper DC menggunakan PWM Arduin.
Berdasarkan penelitian-penelitian sebelumnya pada latar belakang diatas, peneliti ini
difokuskan pada perancangan model material handling crane berbasis kontrol arduino menggunakan
pendekatan rapid prototyping. Alai ini nantinya ingin digunakan sebagai media pembelajaran di
sistem otomasi industri lab teknik industri UMS.
1.1 Landasan Teori
1.1.1 Perancangan dan Pengembangan Produk
Perancangan merupakan proses untuk menghasilkan sebuah produk yang sesuai dengan kebutuhan
manusia (Ginting,2010). Proses pengembangan produk dalam suatu perusahaan umumnya melalui 6
tahapan proses, dimana Fase 0 : Perencanaan Produk, kemudian fase 1 : Pengembangan Konsep, Fase
2 : Perancangan Tingkat Sistem, Fase 3 : Perancangan Detail, Fase 4 : Pengujian dan
Perbaikan, yang terakhir Fase 5 : Produksi Awal (Ulrich dan Eppinger, 2001). Sedangkan
perancangan dan pengembangan produk merupakan keseluruhan proses yang saling terintegrasi
dengan keberadaan produk yang meliputi segala aktivitas mulai dari identifikasi konsumen sampai
pada pabrikasi, penjualan dan deliveri dari produk (Widodo, 2003).
1.1.2 Benchmarking
Benchmarking biasanya digunakan untuk mengevaluasi proses ataupun produk yang ada sehingga
menemukan cara atau proses terbaik dengan harapan mampu memperbaiki serta meningkatkan proses
maupun kualitas suatu produk. Benchmarking juga dapat dilakukan baik pada proses produksi,
produk, jasa maupun sistem dalam suatu organisasi (Budi Kho, 2016).
1.1.3 Rapid Prototyping
3
Rapid prototyping merupakan teknik membentuk dan merakit sebuah produk dengan cara
yang cepat serta terintegrasi antara sistem CAD (Computer Aided Design) dan mesin dengan sistem
Rapid prototyping baik 3D Printing maupun CNC (Rinanto and Sutopo, 2018). Terdapat beberapa
metode pada Rapid prototyping yang ada saat ini. Metode yang digunakan pada penelitian ini adalah
Fused Depotition Modelling, dimana 3D printing menjadi media dalam mewujudkan objek yang akan
dibuat.
1.1.4 3D Printing
3D Printing merupakan alat untuk membuat objek pada 3 dimensi berdasarkan dari model
digital yang telah dirancang. Cara kerja dari alat ini hampir sama dengan printer laser, namun objek
dibentuk dari sejumlah layer atau lapisan yang masing-masing dicetak di atas setiap lapisan lainnya
(Excell, Jon 2013).
1.1.5 SolidWorks
SolidWorks merupakan alikasi berbasis CAD (Computer Aided Design), kelebihan dari
solidworks salah satunya cepat dan sangat mudah digunakan, kemudian aplikasi ini memiliki 3 area
kerja yang saling terintegrasi, yaitu Parts, Assembly dan Drawing. Perubahan pada juga mudah
dimana yang lain akan ikut menyesuaikan sehingga tidak diperlukan editing pada desain yang lain
(Applicad, 2014).
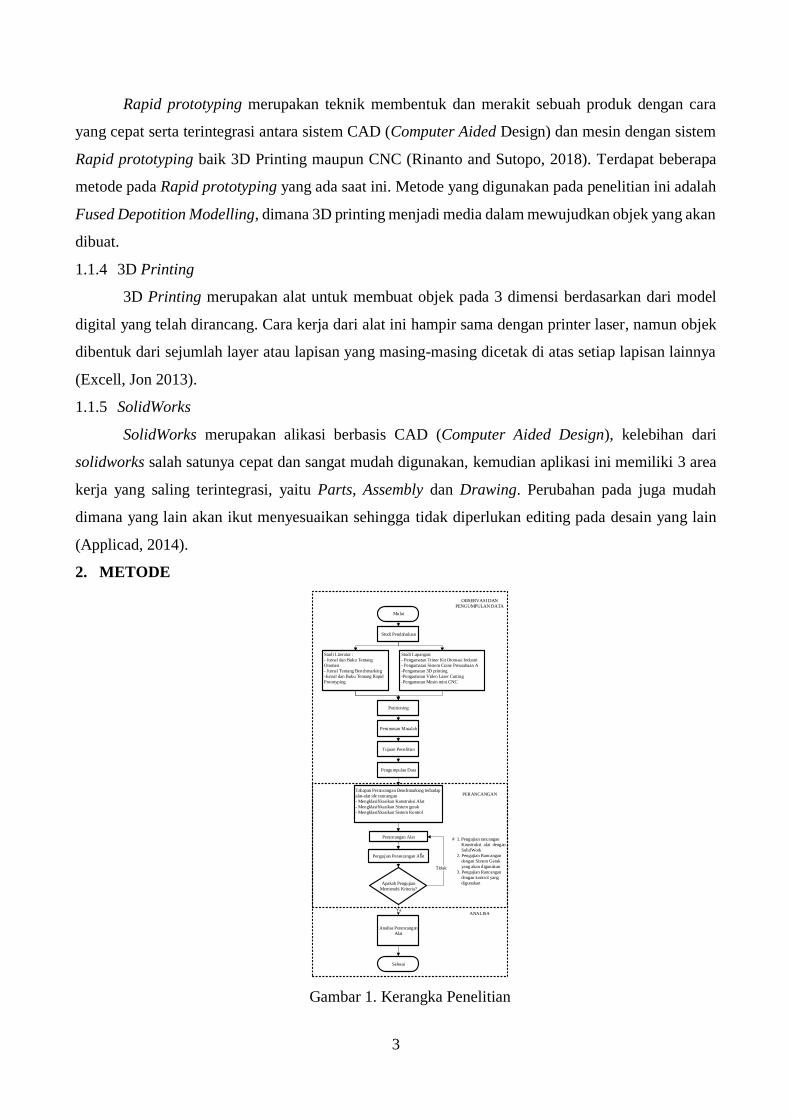
2. METODE
Mulai
Studi Pendahuluan
Studi Literatur :
- Jurnal dan Buku Tentang
Otomasi
- Jurnal Tentang Benchmarking
-Jurnal dan Buku Tentang Rapid
Prototyping
Studi Lapangan:
- Pengamatan Triner Kit Otomasi Industri
- Pengamatan Sistem Crane Perusahaan A
-Pengamatan 3D printing
-Pengamatan Video Laser Cutting
-Pengamatan Mesin mini CNC
Perancangan Alat
Tahapan Perancangan Benchmarking terhadap
alat-alat ide rancangan
- Mengklasifikasikan Konstruksi Alat
- Mengklasifikasikan Sistem gerak
- Mengklasifikasikan Sistem Kontrol
Pengujian Perancangan Alat
Analisa Perancangan
Alat
Selesai
Ya
Tidak
#
# 1. Pengujian rancangan
Konstruksi alat dengan
SolidWork
2. Pengujian Rancangan
dengan Sistem Gerak
yang akan digunakan
3. Pengujian Rancangan
dengan kontrol yang
digunakan
OBSERVASI DAN
PENGUMPULAN DATA
PERANCANGAN
ANALISA
Apakah Pengujian
Memenuhi Kriteria?
Potitioning
Perumusan Masalah
Tujuan Penelitian
Pengumpulan Data
Gambar 1. Kerangka Penelitian
4
Metode dan desain penelitian pada penelitian ini dibuat dalam 3 tahapan besar, yaitu tahapan
observasi dan pengumpulan data, kemudian tahapan perancangan dan yang terakhir tahapan analisa
dari rancangan yang telah dibuat. Penelitian ini dilakukan dari awal semester ganjil 2018 hingga
semester genap 2019. Tempat penelitian ini dilakukan di Ruang Otomasi Industri gedung F lantai 1
Universitas Muhammadiyah Surakarta. Gambar 1. merupakan flowchart tahapan dalam penelitian.
2.1 Observasi dan Pengumpulan Data
a. Studi pendahuluan
Studi Pendahuluan digunakan sebagai acuan menjalankan penelitian. Studi pendahuluan
dibagi menjadi dua bentuk yaitu studi literatur dan studi lapangan. Pada studi literatur dilakukan
dengan cara melakukan review jurnal dan buku yang terkait tentang sistem otomasi, metode
benchmarking dan teknik rapid prototyping. Studi kedua yaitu studi lapangan, dimana studi
lapangan pertama terkait dengan sistem crane yang ada diperusahaan A, terkait trainer kit model
material handling dengan sistem PLC di lab Otomasi Industri, mesin3D printing, mini CNC dan
video laser cutting DIY.
b. Potitioning
Potitioning merupakan upaya untuk menentukan arah dan posisi dari penelitian
berdasarkan penelitian sebelumnya dan menjadi salah satu alasan mengapa penelitian ini layak
dilakukan.
c. Perumusan Masalah
Merupakan tahap di antara sejumlah tahap penelitian yang memiliki kedudukan yang
sangat penting dalam kegiatan penelitian.
d. Tujuan Penelitian
Penentuan tujuan dari penelitian yang dilakukan, dimana tujuan penelitian didasarkan
dari perumusan masalah yang ada sebelumnya.
e. Pengumpulan Data
Teknik pengumpulan data dilakukan melalui beberapa hasil pengamatan, sehingga dapat
dibuat sebuah rancangan material handling crane sebagai media pembelajaran sistem otomasi.
2.2 Perancangan
Proses ini mengklasifikasikan data-data berdasarkan hasil benchmarking dimana perancangan
diklasifikasikan dalam 3 bagian, yaitu konstruksi, sistem gerak dan sistem kontrol. perancangan
material handling crane otomatis menggunakan aplikasi SolidWork.
5
2.3 Pengujian Rancangan
Proses pengujian di bagi dalam tiga hal, yaitu pengujian pada konstruksi rancangan
menggunakan aplikasi SolidWork, kemudian pengujian rancangan dengan sistem gerak yang
digunakan dan yang terakhir pengujian rancangan dengan sistem kontrol yang digunakan.
2.4 Analisia
Analisis dilakukan untuk menguji kesesuaian rancangan alat crane otomatis sebagai trainer
kit untuk media pembelajaran dalam mata kuliah otomasi industri. Sehingga nantinya trainer kit layak
dilanjutkan pada tahap pembuatan.
3. HASIL DAN PEMBAHASAN
3.1 Pengumpulan Data
Untuk melakukan benchmarking, peneliti terlebih dahulu menggumpulkan data terkait benda yang
akan dibenchmark nantinya. Pengumpulan data terkait macam-macam crane yang ada, kemudian
data macam-macam sistem penggerak dan yang terakhir data macam-macam sistem kontrol.
3.2 Proses Benchmarking
Berdasarkan penentuan alat yang pilih, proses benchmarking dilakukan terhadap 5 alat, dimana alat
tersebut memiliki kemiripan dengan data-data yang telah dipilih sebelumnya, kemudian mencari
kelebihan dan kelemahan dari alat-alat tersebut sehingga diperoleh hasil sebagai berikut:
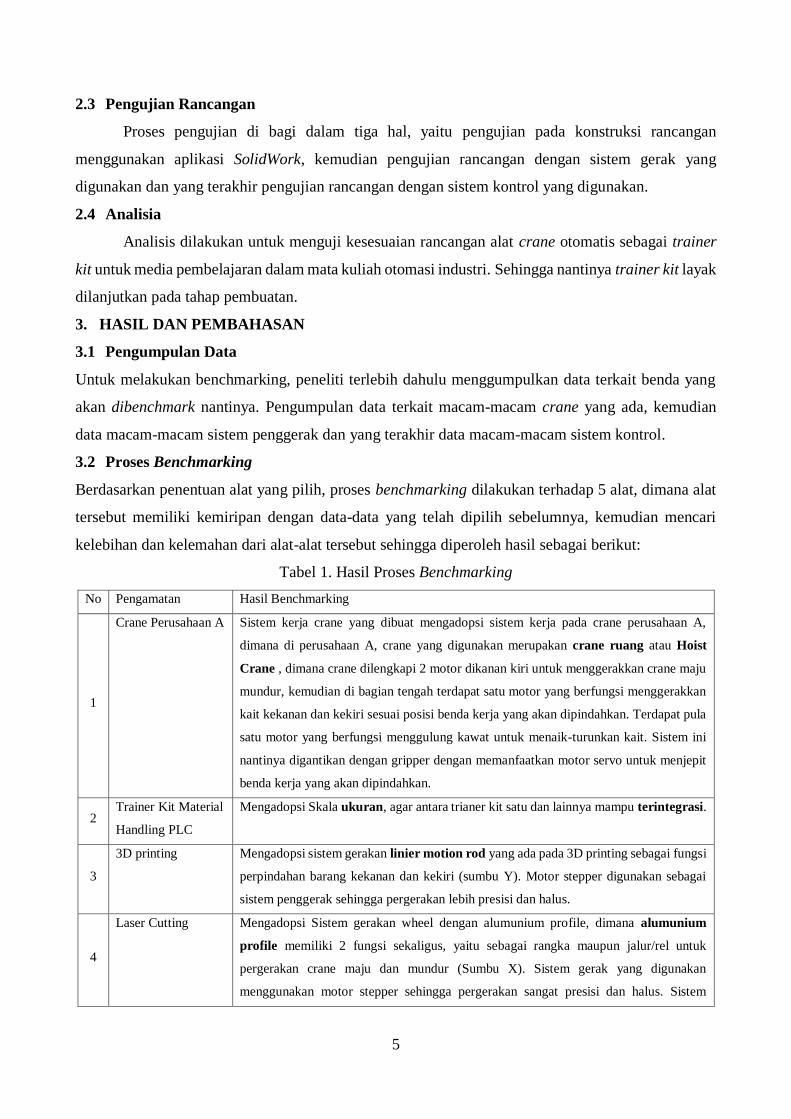
Tabel 1. Hasil Proses Benchmarking
No Pengamatan Hasil Benchmarking
1
Crane Perusahaan A Sistem kerja crane yang dibuat mengadopsi sistem kerja pada crane perusahaan A,
dimana di perusahaan A, crane yang digunakan merupakan crane ruang atau Hoist
Crane , dimana crane dilengkapi 2 motor dikanan kiri untuk menggerakkan crane maju
mundur, kemudian di bagian tengah terdapat satu motor yang berfungsi menggerakkan
kait kekanan dan kekiri sesuai posisi benda kerja yang akan dipindahkan. Terdapat pula
satu motor yang berfungsi menggulung kawat untuk menaik-turunkan kait. Sistem ini
nantinya digantikan dengan gripper dengan memanfaatkan motor servo untuk menjepit
benda kerja yang akan dipindahkan.
2 Trainer Kit Material
Handling PLC
Mengadopsi Skala ukuran, agar antara trianer kit satu dan lainnya mampu terintegrasi.
3
3D printing Mengadopsi sistem gerakan linier motion rod yang ada pada 3D printing sebagai fungsi
perpindahan barang kekanan dan kekiri (sumbu Y). Motor stepper digunakan sebagai
sistem penggerak sehingga pergerakan lebih presisi dan halus.
4
Laser Cutting Mengadopsi Sistem gerakan wheel dengan alumunium profile, dimana alumunium
profile memiliki 2 fungsi sekaligus, yaitu sebagai rangka maupun jalur/rel untuk
pergerakan crane maju dan mundur (Sumbu X). Sistem gerak yang digunakan
menggunakan motor stepper sehingga pergerakan sangat presisi dan halus. Sistem
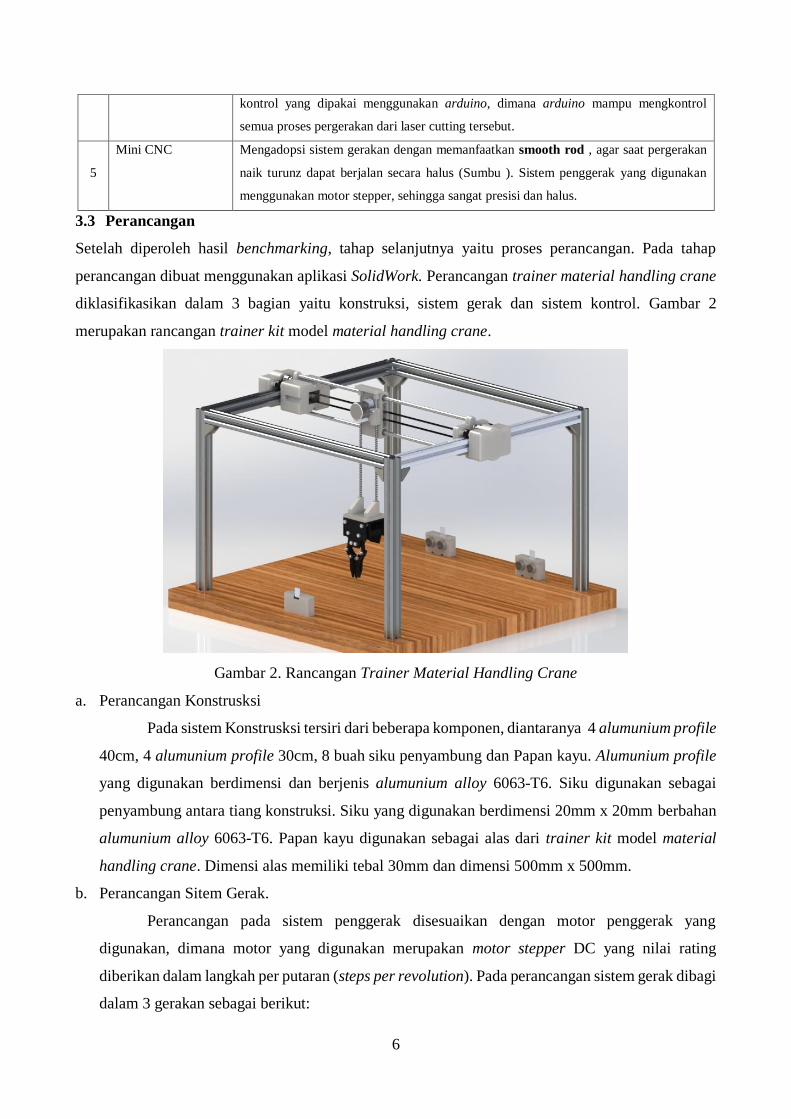
6
kontrol yang dipakai menggunakan arduino, dimana arduino mampu mengkontrol
semua proses pergerakan dari laser cutting tersebut.
5
Mini CNC Mengadopsi sistem gerakan dengan memanfaatkan smooth rod , agar saat pergerakan
naik turunz dapat berjalan secara halus (Sumbu ). Sistem penggerak yang digunakan
menggunakan motor stepper, sehingga sangat presisi dan halus.
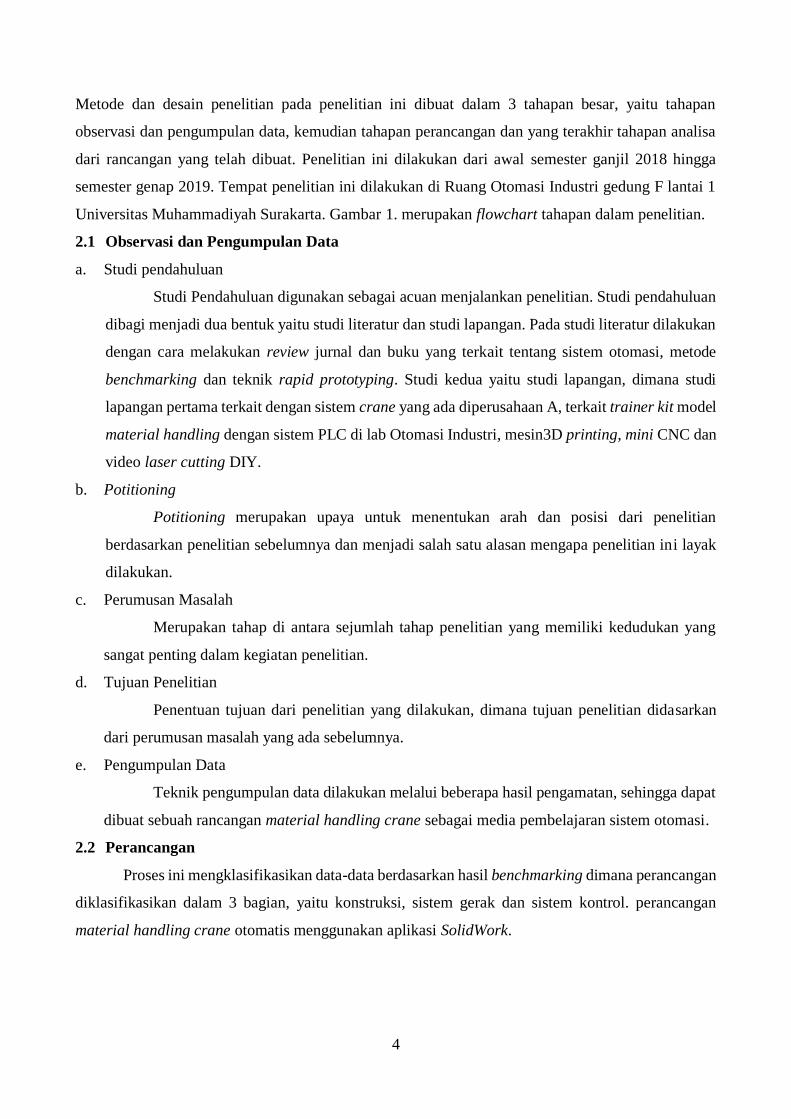
3.3 Perancangan
Setelah diperoleh hasil benchmarking, tahap selanjutnya yaitu proses perancangan. Pada tahap
perancangan dibuat menggunakan aplikasi SolidWork. Perancangan trainer material handling crane
diklasifikasikan dalam 3 bagian yaitu konstruksi, sistem gerak dan sistem kontrol. Gambar 2
merupakan rancangan trainer kit model material handling crane.
Gambar 2. Rancangan Trainer Material Handling Crane
a. Perancangan Konstrusksi
Pada sistem Konstrusksi tersiri dari beberapa komponen, diantaranya 4 alumunium profile
40cm, 4 alumunium profile 30cm, 8 buah siku penyambung dan Papan kayu. Alumunium profile
yang digunakan berdimensi dan berjenis alumunium alloy 6063-T6. Siku digunakan sebagai
penyambung antara tiang konstruksi. Siku yang digunakan berdimensi 20mm x 20mm berbahan
alumunium alloy 6063-T6. Papan kayu digunakan sebagai alas dari trainer kit model material
handling crane. Dimensi alas memiliki tebal 30mm dan dimensi 500mm x 500mm.
b. Perancangan Sitem Gerak.
Perancangan pada sistem penggerak disesuaikan dengan motor penggerak yang
digunakan, dimana motor yang digunakan merupakan motor stepper DC yang nilai rating
diberikan dalam langkah per putaran (steps per revolution). Pada perancangan sistem gerak dibagi
dalam 3 gerakan sebagai berikut:
7
1) Rancangan Penggerak Arah Maju-Mundur
Pada perancangan ini terdapat 38 part. Untuk part yang dibeli diantaranya 6 baut L 36mm,
6 wheel, 12 ring, 2 pulley, 2 motor stepper dc, 4 baut pengunci cover. Sedangkan part yang dapat
dibuat menggunakan teknik rapid prototyping diantaranya 2 Part A Back and Forth, 2 Part B
Back and Forth dan 2 Cover Motor.
2) Rancangan Penggerak Arah Kanan-Kiri
Pada perancangan ini terdapat 15 part. Untuk part yang dibeli diantaranya 1 motor
stepper DC, 1 pulley, 2 baut pengunci, 1 gulung belt, 1 fix pulley, 2 linier motion rod dan 2
smooth rod 6mm sepanjang 400mm. Sedangkan part yang dapat dibuat dengan teknik rapid
prototyping diantaranya 1 stand cover motor, 1 middle motion, 2 gripper belt, dan 1 stand pulley
fix.
3) Rancangan Penggerak Arah Naik-Turun.
Pada perancangan ini terdapat 12 part. Untuk part yang dibeli diantaranya 2 smooth rod
3mm, 2 baut pengunci, 1 motor stepper DC, 2 spacer, 1 gulung rope dan 1 buah gripper.
Sedangkan part yang dapat dibuat dengan teknik rapid prototyping diantaranya 1 holder up, 1
Rope Pulley, dan 1 holder down.
c. Perancangan Sistem Kontrol
Pada perancangan ini terdapat 12 part. Untuk part yang dibeli diantaranya 1 unit Arduino
mega, 3 sensor ultrasonic, dan kabel male female sesuai kebutuhan. Sedangkan part yang dapat
dibuat dengan teknik rapid prototyping 3 case sensor A dan 3 case sensor B
3.4 Pengujian
Untuk mengetahui apakah rancangan memenuhi kriteria kelayakan, dilakukan 3 pengujian
yang berbeda, yaitu pengujian pada konstruksi rancangan menggunakan aplikasi SolidWork,
kemudian pengujian rancangan dengan sistem gerak yang digunakan dan yang terakhir pengujian
rancangan dengan sistem kontrol yang digunakan.
Pengujian konstruksi dilakukan dengan menggunakan aplikasi solidwork, pengujian
dilakukan dengan memanfaatkan menu simulation yang disediakan solidwork. Langkah yang
dilakukan pada proses ini yaitu 1) mempersiapkan assembly rancangan yang akan diuji, kemudian 2)
menentukan tipe material dari rancangan konstruksi yaitu alumunium alloy 6063-T6. Setelah
rancangan siap, 3) dilakukan penentuan titik tumpu dari keseluruhan konstruksi, dimana titik tumpu
dipusatkan pada bagian bawah tiang konstrusi. Langkah selanjutnya 4) mengatur contact sets pada
rancangan konstruksi, dengan tujuan memberikan perintah bahwa rancangan yang dibuat merupakan
hasil assembly. Untuk menguji bebanyang akan diberikan 5) dilakukan dengan cara mengatur total
berat yang akan dibebankan seberat 49N. Untuk mengetahui hasil pengujian dilakukan dengan cara
8
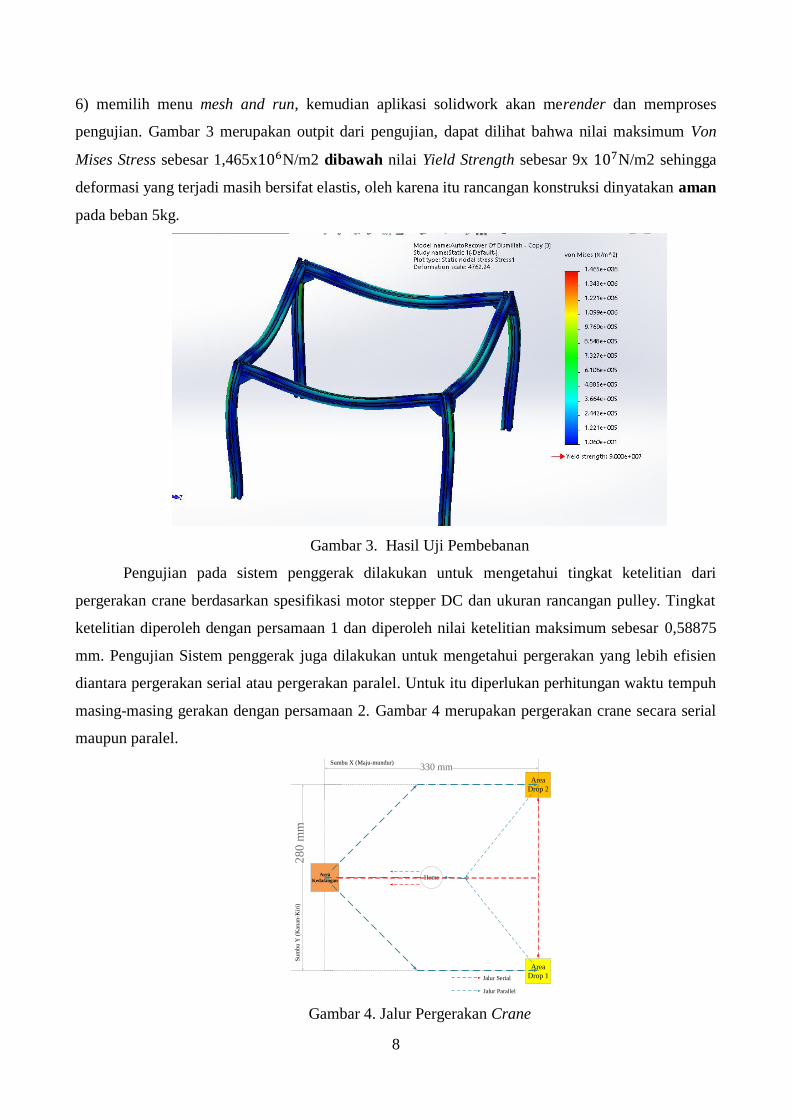
6) memilih menu mesh and run, kemudian aplikasi solidwork akan merender dan memproses
pengujian. Gambar 3 merupakan outpit dari pengujian, dapat dilihat bahwa nilai maksimum Von
Mises Stress sebesar 1,465x106N/m2 dibawah nilai Yield Strength sebesar 9x 107N/m2 sehingga
deformasi yang terjadi masih bersifat elastis, oleh karena itu rancangan konstruksi dinyatakan aman
pada beban 5kg.
Gambar 3. Hasil Uji Pembebanan
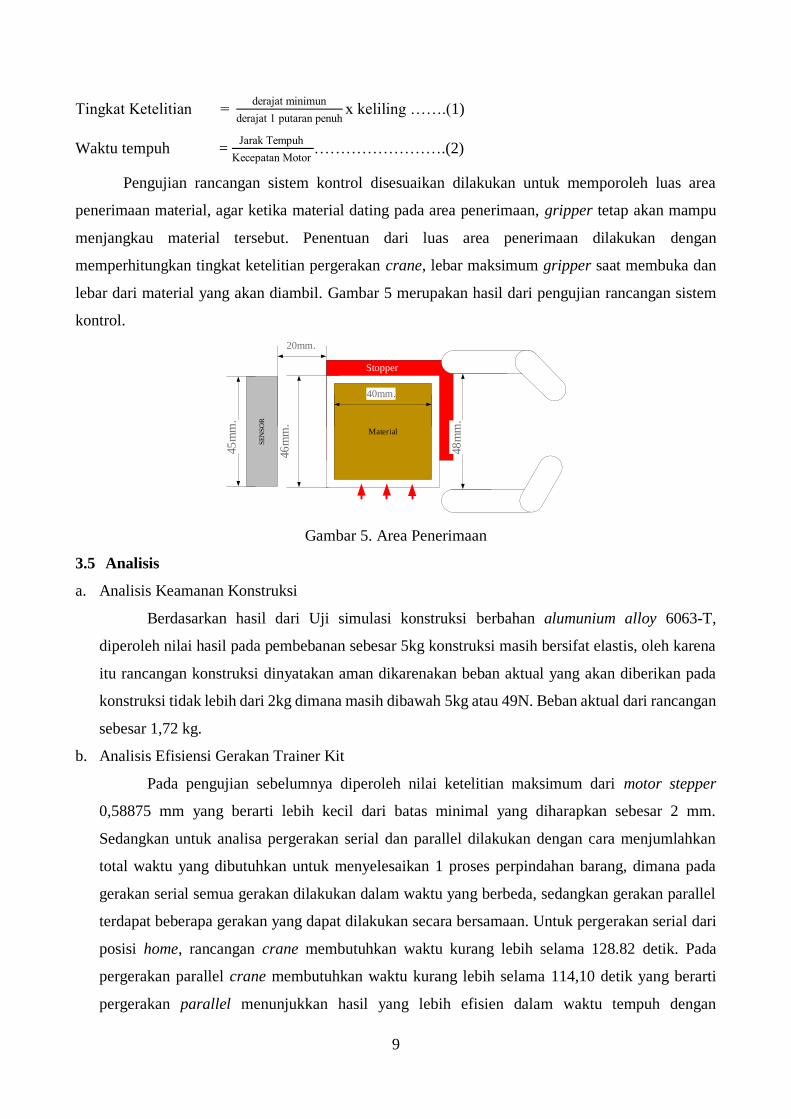
Pengujian pada sistem penggerak dilakukan untuk mengetahui tingkat ketelitian dari
pergerakan crane berdasarkan spesifikasi motor stepper DC dan ukuran rancangan pulley. Tingkat
ketelitian diperoleh dengan persamaan 1 dan diperoleh nilai ketelitian maksimum sebesar 0,58875
mm. Pengujian Sistem penggerak juga dilakukan untuk mengetahui pergerakan yang lebih efisien
diantara pergerakan serial atau pergerakan paralel. Untuk itu diperlukan perhitungan waktu tempuh
masing-masing gerakan dengan persamaan 2. Gambar 4 merupakan pergerakan crane secara serial
maupun paralel.
Area
Kedatangan
Area
Drop 1
Area
Drop 2
Home
330 mm
280 m
m
Jalur Serial
Jalur Parallel
Sumbu X (Maju-mundur)
Su
mb
u Y
(K
anan
-Kir
i)
Gambar 4. Jalur Pergerakan Crane
9
Tingkat Ketelitian = derajat minimun
derajat 1 putaran penuhx keliling …….(1)
Waktu tempuh = Jarak Tempuh
Kecepatan Motor …………………….(2)
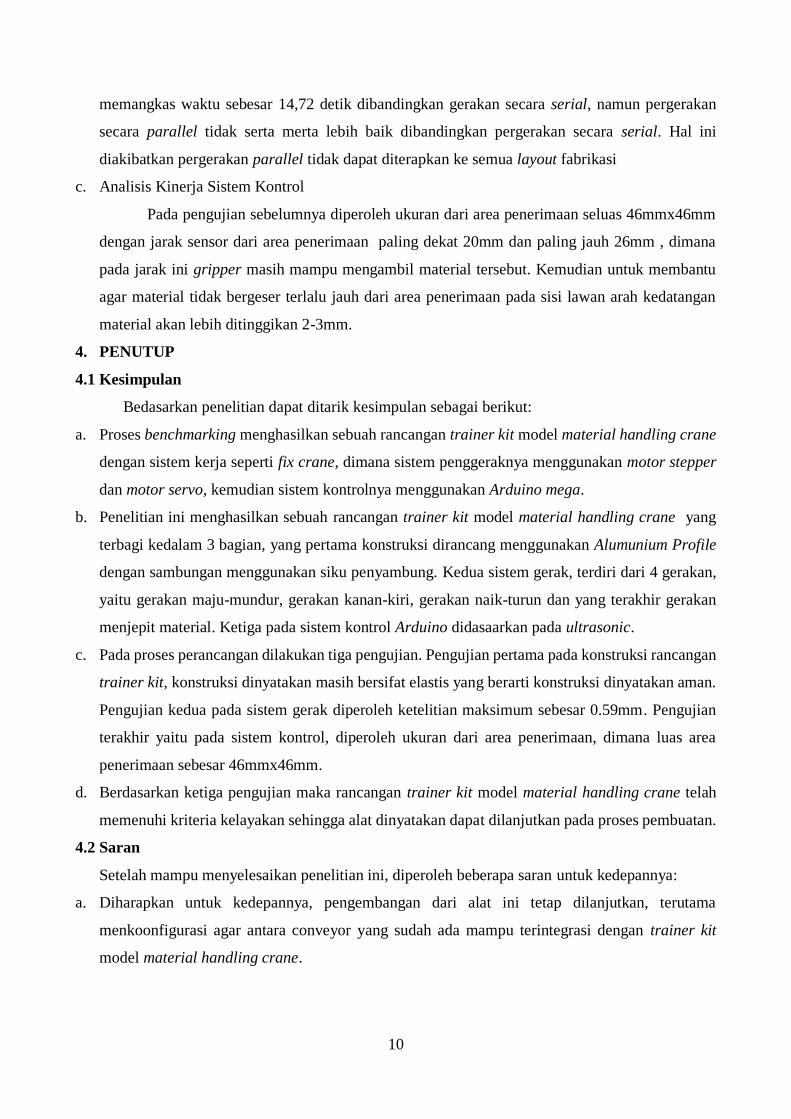
Pengujian rancangan sistem kontrol disesuaikan dilakukan untuk memporoleh luas area
penerimaan material, agar ketika material dating pada area penerimaan, gripper tetap akan mampu
menjangkau material tersebut. Penentuan dari luas area penerimaan dilakukan dengan
memperhitungkan tingkat ketelitian pergerakan crane, lebar maksimum gripper saat membuka dan
lebar dari material yang akan diambil. Gambar 5 merupakan hasil dari pengujian rancangan sistem
kontrol.
46
mm
.
Material
40mm.
48
mm
.
SE
NS
OR
45
mm
.
20mm.
Stopper
Gambar 5. Area Penerimaan
3.5 Analisis
a. Analisis Keamanan Konstruksi
Berdasarkan hasil dari Uji simulasi konstruksi berbahan alumunium alloy 6063-T,
diperoleh nilai hasil pada pembebanan sebesar 5kg konstruksi masih bersifat elastis, oleh karena
itu rancangan konstruksi dinyatakan aman dikarenakan beban aktual yang akan diberikan pada
konstruksi tidak lebih dari 2kg dimana masih dibawah 5kg atau 49N. Beban aktual dari rancangan
sebesar 1,72 kg.
b. Analisis Efisiensi Gerakan Trainer Kit
Pada pengujian sebelumnya diperoleh nilai ketelitian maksimum dari motor stepper
0,58875 mm yang berarti lebih kecil dari batas minimal yang diharapkan sebesar 2 mm.
Sedangkan untuk analisa pergerakan serial dan parallel dilakukan dengan cara menjumlahkan
total waktu yang dibutuhkan untuk menyelesaikan 1 proses perpindahan barang, dimana pada
gerakan serial semua gerakan dilakukan dalam waktu yang berbeda, sedangkan gerakan parallel
terdapat beberapa gerakan yang dapat dilakukan secara bersamaan. Untuk pergerakan serial dari
posisi home, rancangan crane membutuhkan waktu kurang lebih selama 128.82 detik. Pada
pergerakan parallel crane membutuhkan waktu kurang lebih selama 114,10 detik yang berarti
pergerakan parallel menunjukkan hasil yang lebih efisien dalam waktu tempuh dengan
10
memangkas waktu sebesar 14,72 detik dibandingkan gerakan secara serial, namun pergerakan
secara parallel tidak serta merta lebih baik dibandingkan pergerakan secara serial. Hal ini
diakibatkan pergerakan parallel tidak dapat diterapkan ke semua layout fabrikasi
c. Analisis Kinerja Sistem Kontrol
Pada pengujian sebelumnya diperoleh ukuran dari area penerimaan seluas 46mmx46mm
dengan jarak sensor dari area penerimaan paling dekat 20mm dan paling jauh 26mm , dimana
pada jarak ini gripper masih mampu mengambil material tersebut. Kemudian untuk membantu
agar material tidak bergeser terlalu jauh dari area penerimaan pada sisi lawan arah kedatangan
material akan lebih ditinggikan 2-3mm.
4. PENUTUP
4.1 Kesimpulan
Bedasarkan penelitian dapat ditarik kesimpulan sebagai berikut:
a. Proses benchmarking menghasilkan sebuah rancangan trainer kit model material handling crane
dengan sistem kerja seperti fix crane, dimana sistem penggeraknya menggunakan motor stepper
dan motor servo, kemudian sistem kontrolnya menggunakan Arduino mega.
b. Penelitian ini menghasilkan sebuah rancangan trainer kit model material handling crane yang
terbagi kedalam 3 bagian, yang pertama konstruksi dirancang menggunakan Alumunium Profile
dengan sambungan menggunakan siku penyambung. Kedua sistem gerak, terdiri dari 4 gerakan,
yaitu gerakan maju-mundur, gerakan kanan-kiri, gerakan naik-turun dan yang terakhir gerakan
menjepit material. Ketiga pada sistem kontrol Arduino didasaarkan pada ultrasonic.
c. Pada proses perancangan dilakukan tiga pengujian. Pengujian pertama pada konstruksi rancangan
trainer kit, konstruksi dinyatakan masih bersifat elastis yang berarti konstruksi dinyatakan aman.
Pengujian kedua pada sistem gerak diperoleh ketelitian maksimum sebesar 0.59mm. Pengujian
terakhir yaitu pada sistem kontrol, diperoleh ukuran dari area penerimaan, dimana luas area
penerimaan sebesar 46mmx46mm.
d. Berdasarkan ketiga pengujian maka rancangan trainer kit model material handling crane telah
memenuhi kriteria kelayakan sehingga alat dinyatakan dapat dilanjutkan pada proses pembuatan.
4.2 Saran
Setelah mampu menyelesaikan penelitian ini, diperoleh beberapa saran untuk kedepannya:
a. Diharapkan untuk kedepannya, pengembangan dari alat ini tetap dilanjutkan, terutama
menkoonfigurasi agar antara conveyor yang sudah ada mampu terintegrasi dengan trainer kit
model material handling crane.
11
b. Penambahan limit switch pada bagian area kedatangan apabila telah terintegrasi dengan conveyor
yang ada. Limit switch digunakan untuk menggantikan fungsi peninggian pada tepi area
kedatangan.
c. Perlunya buku panduan pada alat trainer, sehingga memudahkan mahasiswa memahami trainer
kit tersebut.
d. Perlunya pengadaan alat rapid prototyping 3D Printing yang lebih modern maupun alat rapid
prototyping jenis lain yang memiliki fungsi lebih baik dari alat yang sudah ada di lab otomasi.
e. Perlunya adanya buku panduan pada alat rapid prototyping, sehingga penggunaan alat lebih
efisien.
f. Perlunya mahasiswa untuk mempelajari serta memahami cara kerja sistem kendali arduino,
karena saat ini materi pembelajaran coding sudah sangat berkembang pesat.
DAFTAR PUSTAKA
Applicad. 2014. Mengenal Solidworks. Http://Applicadindonesia.com. Diakses pada 2 Desember
2018 (15:33).
Asnawi dan Wijaya. 2008. Metodologi Penelitian Keuangan, Prosedur, Ide, dan Kontrol. Edisi
Pertama. Yogyakarta: Graha Ilmu.
Budi Kho. 2018. Pengertian Benchmarking (Tolok Ukur) dan Jenis-Jenisnya.
Https://Ilmumanajemenindustri.com. (2016). Diakses pada 2 Desember 2018 (20:06).
Excell, Jon. 2013.The rise of additive manufacturing. The Engineer.
Karl T Ulrich, Steve D Eppinger. 2001. Perancangan Pengembangan Produk. Jakarta: Salemba
Teknika.
Rinanto, A. And Sutopo, W. 2018. Perkembangan Teknologi Rapid Prototyping : Study Literatur
Perkembangan Teknologi Rapid Prototyping. Jurnal Metris 18: 105–112.
Recommended