
1

DA
AP /
MH
L -
1/02
/201
0Succès du contrôle passif pour les applications
• Des générateurs de tourbillons sont utilisés dans de multiples applications
• Historiquement vu comme un palliatif• Peut être pris en compte dans la boucle de conception• Contribue à la trainée => système fluidique (actif) potentiellement pulsé
• A priori un paramètre amplitude du jet A(t)• Pour certains actionneurs « oscillants » (jets synthétiques) : A(t), f(t)
DA
AP /
MH
L -
1/02
/201
0Intérêt du contrôle en boucle fermé
• Historiquement application aux commandes de vol• Pilotage d’un drone.
• L’idée est de s’affranchir de la sensibilité aux rafales (maintien d’une trajectoire= maintien d’efforts aérodynamiques constants => disturbance rejection)
• Avec des surfaces de contrôle classiques ou des gouvernes fluidiques (rapides)
• Adaptation à un changement de géométrie• Braquage d’une gouverne (amélioration de l’efficacité de la gouverne de
direction qui n’est pas équipée de dispositifs hypersustentateurs (fente) => possibilité de dessiner une gouverne plus petite)
• Adaptation à un changement de régime de vol (robustesse)• Incidence, vitesse
• Minimisation du cout du contrôle• L’effort est inférieur pour maintenir un écoulement attaché que pour le recoller
(adaptation de l’amplitude du contrôle)

DA
AP /
MH
L -
1/02
/201
0Deux classes de contrôle en boucle fermée
• Optimisation du contrôle sur un temps court (plus faible que les constantes de temps du pilotage)
• On contrôle des quantités (pression, frottement) filtrés en moyenne glissante
• Les techniques d’optimisation de type gradient peuvent suffire (voir un exemple d’application à suivre). Pour que la mise en œuvre de ces algorithmes ait un sens il faut bien sur qu’un optimum existe (bien choisir la fonction objectif et souvent introduire le cout du contrôle).
• Doit suffire pour la plupart des applications
• Contrôle temps réel • Doit s’adapter aux échelles de temps de l’écoulement• L’idée est que grâce aux non linéarités du système une petite
perturbation peut avoir des effets à grandes échelles. • Ordre de grandeur sur un volet (fluctuations de couche de mélange au
point de décollement St=0.012 = f /Uinf. f=0.012*100/0.005=240 Hz)

4
Introduction - Le décollement
jeudi 29 septembre 2011

5
Introduction - Contrôle des écoulements
contrôle actif des écoulements
1 perturbation générée par un actionneur peut avoir une action à grande échelle sur lʼécoulement
jeudi 29 septembre 2011
6
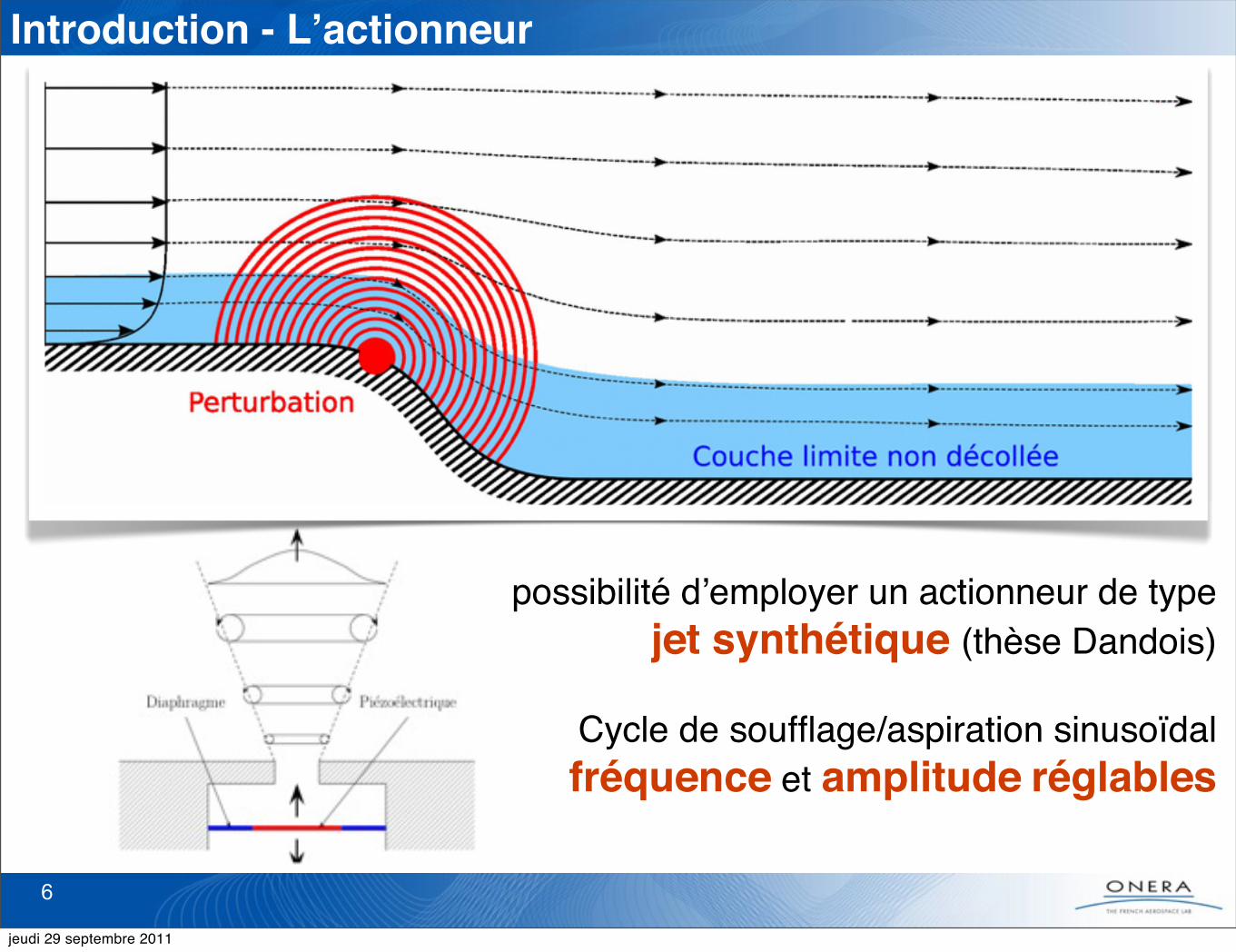
Introduction - Lʼactionneur
possibilité dʼemployer un actionneur de type jet synthétique (thèse Dandois)
Cycle de soufflage/aspiration sinusoïdalfréquence et amplitude réglables
jeudi 29 septembre 2011

8
Introduction - Contrôle en boucle fermée
jeudi 29 septembre 2011

52
III - 3 - Identification et validation dʼun modèleobjectif du modèle :se substituer aux simulations URANS
modèle non-linéaire
structure NARX retenue
jeudi 29 septembre 2011
53
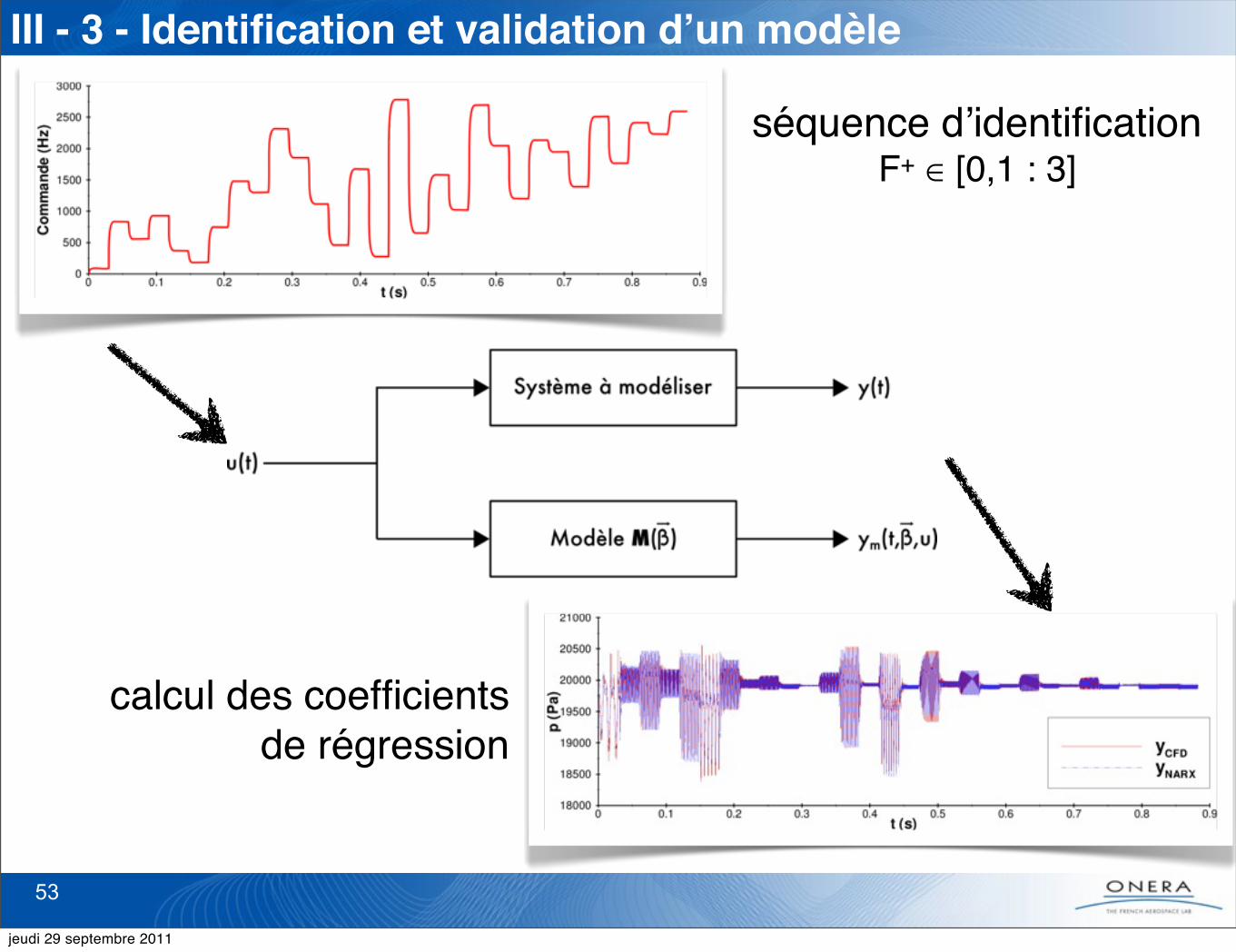
séquence dʼidentificationF+ ∈ [0,1 : 3]
calcul des coefficients de régression
III - 3 - Identification et validation dʼun modèle
jeudi 29 septembre 2011

54
performances du modèle NARX dépendent de son paramétragedt, p, lagu, lagy, nu, ny, nuu, nuy, α
compromis entre stabilité et précision
paramétres obtenus par une étude paramétrique
calcul des régresseurs faits par la méthode de régularisation de Tikhonov
III - 3 - Identification et validation dʼun modèle
jeudi 29 septembre 2011

55
Validation du modèle avec une séquence de commande stationnaire pour laquelle le modèle nʼa pas été identifié
commande constante 464 Hz
III - 3 - Identification et validation dʼun modèle
jeudi 29 septembre 2011
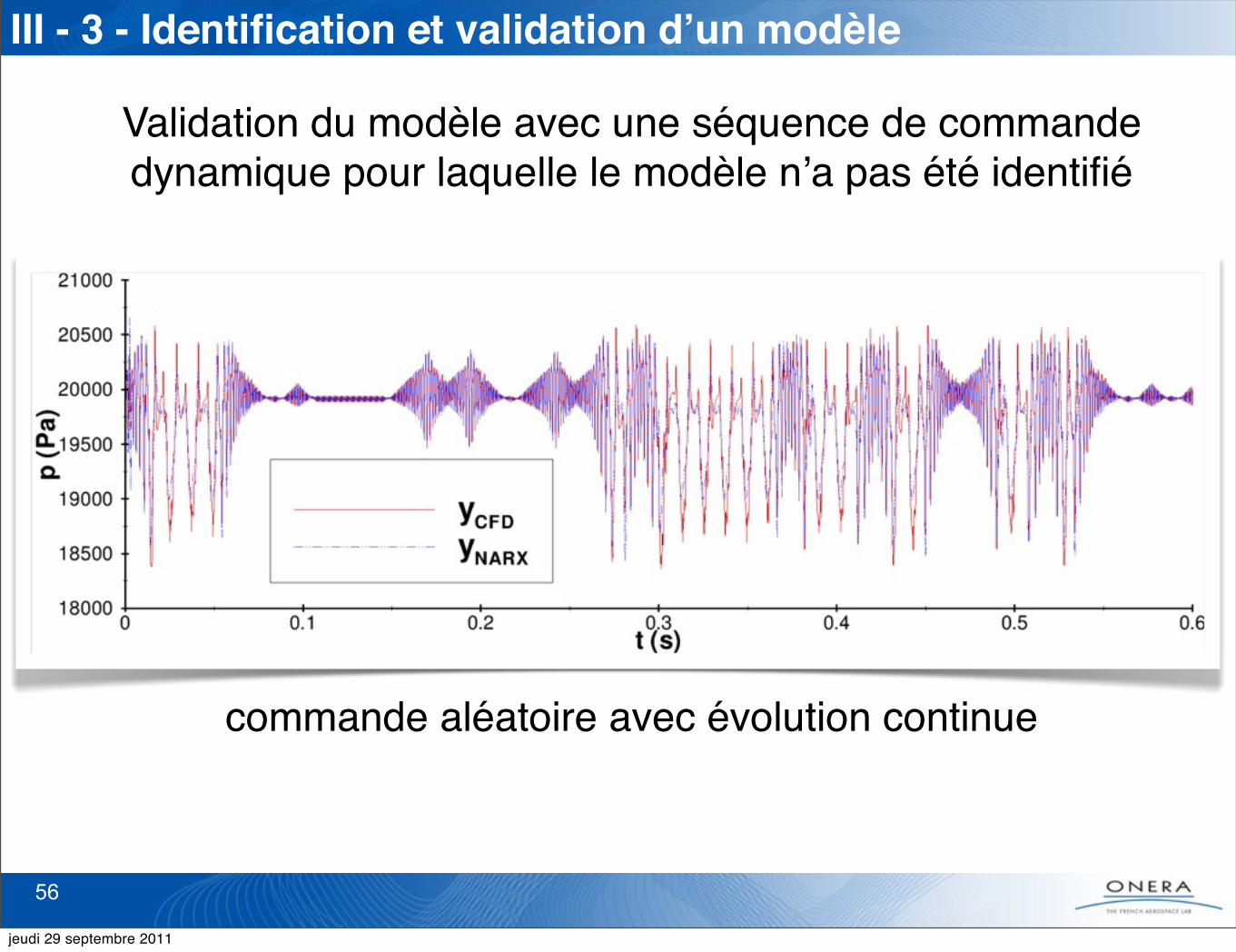
Validation du modèle avec une séquence de commande dynamique pour laquelle le modèle nʼa pas été identifié
commande aléatoire avec évolution continue
56
III - 3 - Identification et validation dʼun modèle
jeudi 29 septembre 2011

57
Pression moyenneIII - 3 - Identification et validation dʼun modèle
jeudi 29 septembre 2011

60
IV - 1 - Démarche et choix de lʼalgorithme de régulation
objectif de contrôlemaximiser la pression pariétale moyenne en x/h=2,7
asservissement dʼoptimisation en temps réelmaximiser la pression pariétale en moyenne glissante
obtenue par filtrage passe-bas (Bessel ordre 4)régulation sur un état quasi-statique du système
jeudi 29 septembre 2011

61
optimisation par méthode de descente par gradient .en temps réel sur
un état quasi-statique du système
régulateur PI surgradient local en temps réel
?modulation dʼune
perturbation
filtre de Kalman étendu
identification en ligne dʼun modèle
logique floue
IV - 1 - Démarche et choix de lʼalgorithme de régulation
jeudi 29 septembre 2011

63
optimisation en temps réel par régulation PI sur une estimation de gradient obtenu par
modulation dʼune perturbation
= extremum seeking
ʻclassiqueʼ
IV - 2 - Extremum seeking classique et améliorations
2 principaux paramètres de réglages :
1. amplitude de la perturbation2. gain du régulateur PI
jeudi 29 septembre 2011
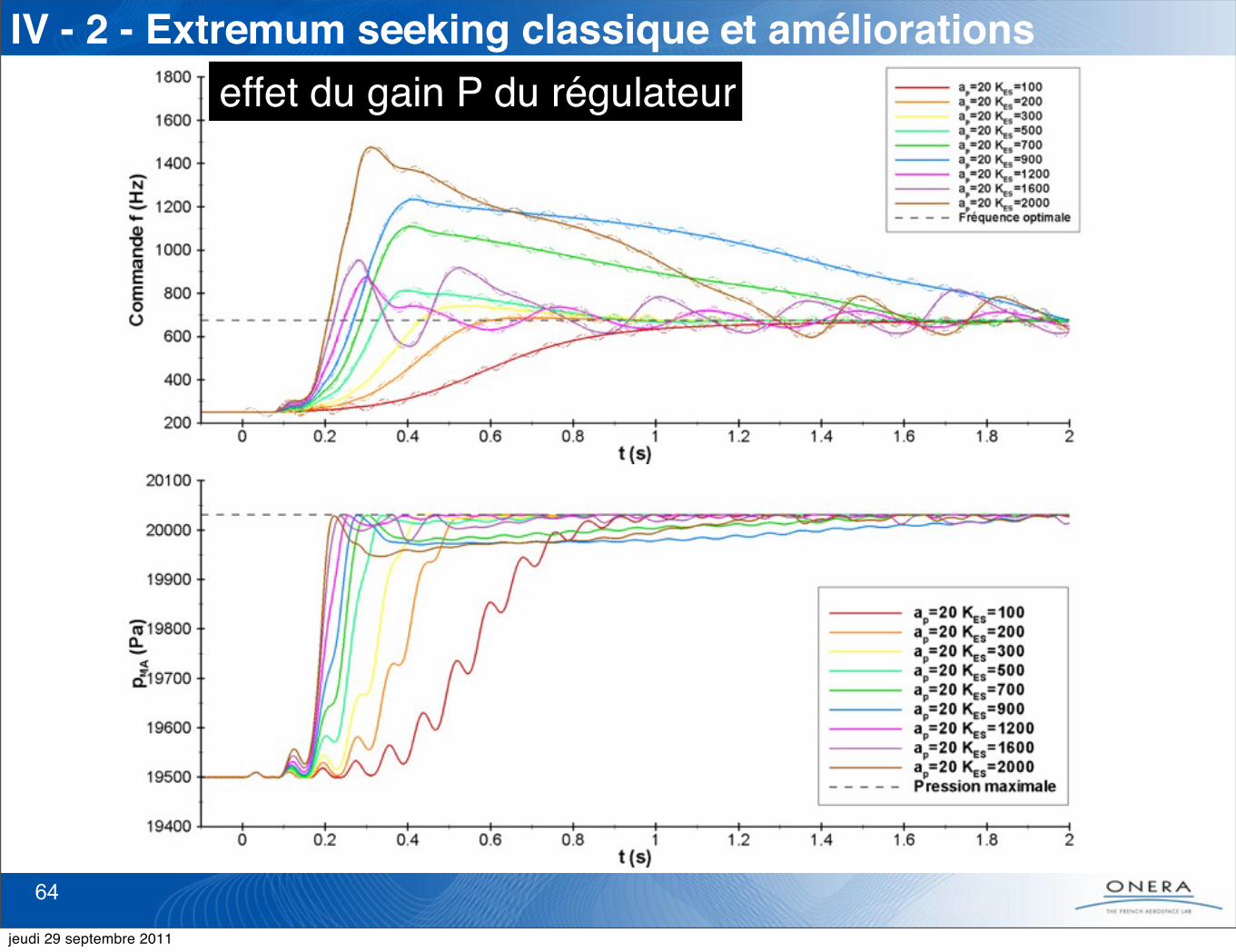
64
IV - 2 - Extremum seeking classique et améliorationseffet du gain P du régulateur
jeudi 29 septembre 2011

65
IV - 2 - Extremum seeking classique et améliorationseffet de lʼamplitude de la perturbation
jeudi 29 septembre 2011
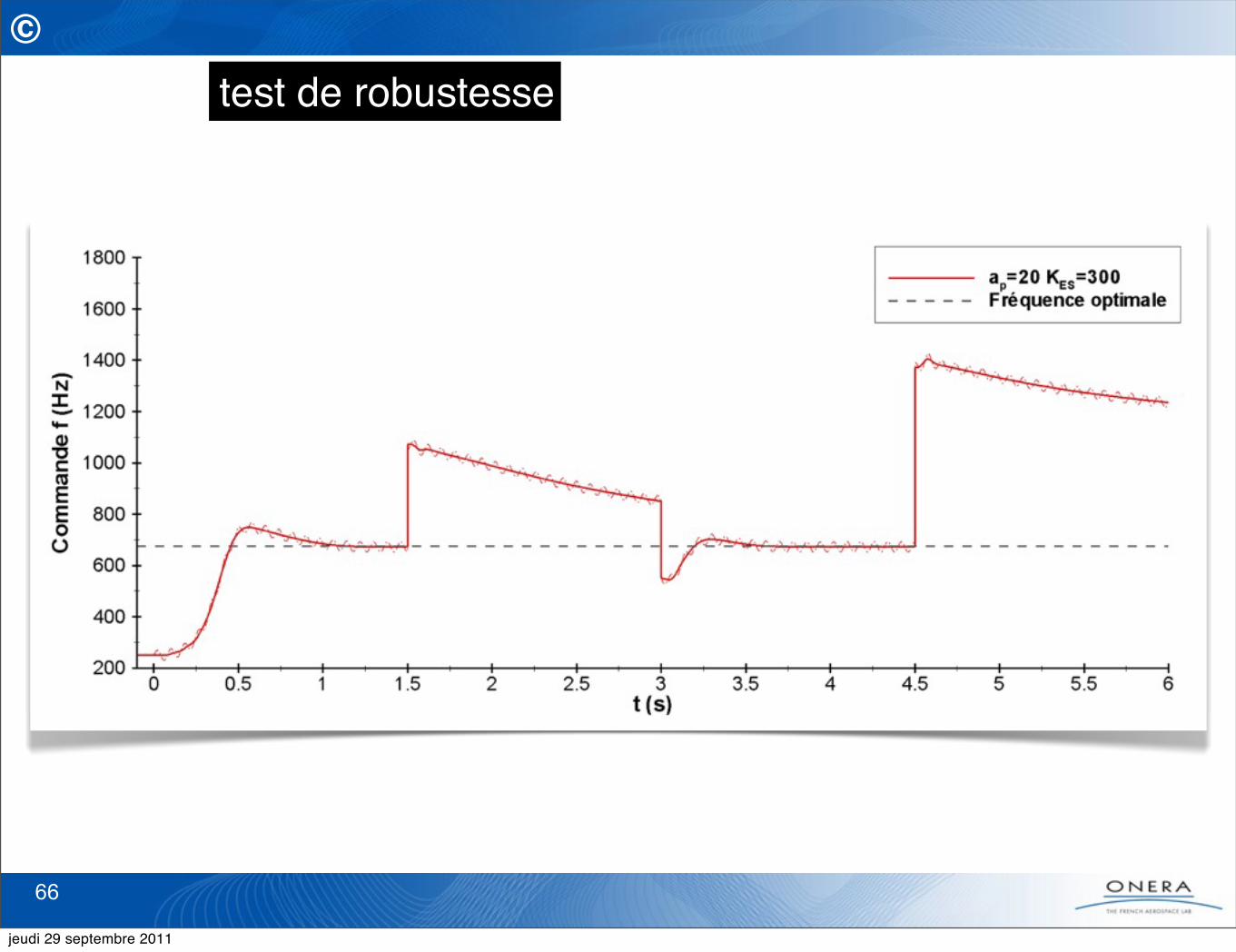
66
©test de robustesse
jeudi 29 septembre 2011

67
atouts de lʼextremum seeking classique➡ Convergence vers la commande qui maximise la pression➡ Algorithme robuste
limites de lʼalgorithme➡ Temps de convergence 1 à 2 s➡ Inertie de lʼestimation du gradient➡ Oscillation autour de la commande optimale possible➡ Estimation du gradient peut ne plus être rigoureuse➡ Le système est toujours soumis à la perturbation
solutions envisagées➡ Gain adaptatif➡ Amplitude de perturbation adaptative
IV - 2 - Extremum seeking classique et améliorations
jeudi 29 septembre 2011
Recommended

















