Robótica Industrial
MORFOLOGIA
La base de estas transparencias han sido preparadas por A. Barrientos como complemento didáctico al libro Fundamentos de Robótica 2ª edición (McGraw-Hill 2007). Algunas diapositivas han sido editadas para el curso de Robótica I de Ingeniería Mecatrónica.
1
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 2
Índice
1. Estructura mecánica. Configuraciones2. Transmisiones y reductores 3. Actuadores 4. Sensores5. Elementos terminales6. Sistema de control
2
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 3
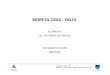
Partes de un robot industrial
Estructura mecánica
Unidad de control
Efectorfinal
3
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 4
Estructura mecánica de un robot manipulador (I)
Inser Robótica
4

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 5
Estructura mecánica de un robot manipulador (II)
• La estructura mecánica de un robot manipulador se constituye por una cadena cinemática ! Robot = elementos o eslabones unidos por articulaciones
5
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 5
Estructura mecánica de un robot manipulador (II)
• La estructura mecánica de un robot manipulador se constituye por una cadena cinemática ! Robot = elementos o eslabones unidos por articulaciones
• Articulaciones permiten el movimiento relativo entre 2 elementos en contacto.
5

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 5
Estructura mecánica de un robot manipulador (II)
• La estructura mecánica de un robot manipulador se constituye por una cadena cinemática ! Robot = elementos o eslabones unidos por articulaciones
• Articulaciones permiten el movimiento relativo entre 2 elementos en contacto.
• Grados de libertad de la articulación: cada uno de los movimientos independientes que, en una articulación, puede realizar un elemento con respecto al otro.
5
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 5
Estructura mecánica de un robot manipulador (II)
• La estructura mecánica de un robot manipulador se constituye por una cadena cinemática ! Robot = elementos o eslabones unidos por articulaciones
• Articulaciones permiten el movimiento relativo entre 2 elementos en contacto.
• Grados de libertad de la articulación: cada uno de los movimientos independientes que, en una articulación, puede realizar un elemento con respecto al otro.
• Tipos de movimiento en articulaciones:– Desplazamiento– Giro– Combinación
5

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 6
Pares Bajos de ReuleauxEn 1876 Franz Reuleaux identifico los posibles movimientos entre dos elementos en contacto
Denomino pares inferiores a aquellos en los que el contacto se realiza entre superficies.
Pares superiores son cuando el contacto es puntual o lineal
De los pares inferiores sólo 3 tienen 1 gdl
6
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 7
Articulaciones de robots
• En la práctica, en robótica sólo se emplean las articulaciones de solo 1 gdl (rotación y prismática).
• En caso de que un robot tuviera alguna articulación con más de un grado de libertad, se podría asumir que se trata de varias articulaciones diferentes, unidas por eslabones de longitud nula.
7

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 8
Cadena cinemática abierta y cerradaCuando en una cadena cinemática, se puede llegar desde cualquier eslabón a cualquier otro, mediante al menos 2 caminos, se dice que se trata de una cadena cinemática cerrada. En caso de que solo haya un camino posible se dirá que se trata de una cadena cinemática abierta.
8
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 9
Grados de libertadE l n ú m e r o d e p a r á m e t r o s independientes necesarios para especificar completamente la localización espacial de su extremo
Nota: De acuerdo a UNE EN ISO 8373:1998:
Grado de libertad: Cada una de las variables (de un máximo de 6) n e c e s a r i a s p a r a d e f i n i r l o s movimientos de un cuerpo en el espacio
EJE: cada uno de los movimientos independientes de la totalidad de las las articulaciones del robot
9

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 10
Obtención de los GDL de una cadena cinemática
!= GDL del espacio de trabajo
n: Número de barras, incluida la base
j: número de articulaciones (binarias)
fi: Grados de libertad relativos permitidos a la articulación i
10
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 10
Obtención de los GDL de una cadena cinemática
!= GDL del espacio de trabajo
n: Número de barras, incluida la base
j: número de articulaciones (binarias)
fi: Grados de libertad relativos permitidos a la articulación i
10

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 10
Obtención de los GDL de una cadena cinemática
!= GDL del espacio de trabajo
n: Número de barras, incluida la base
j: número de articulaciones (binarias)
fi: Grados de libertad relativos permitidos a la articulación i
10
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 11
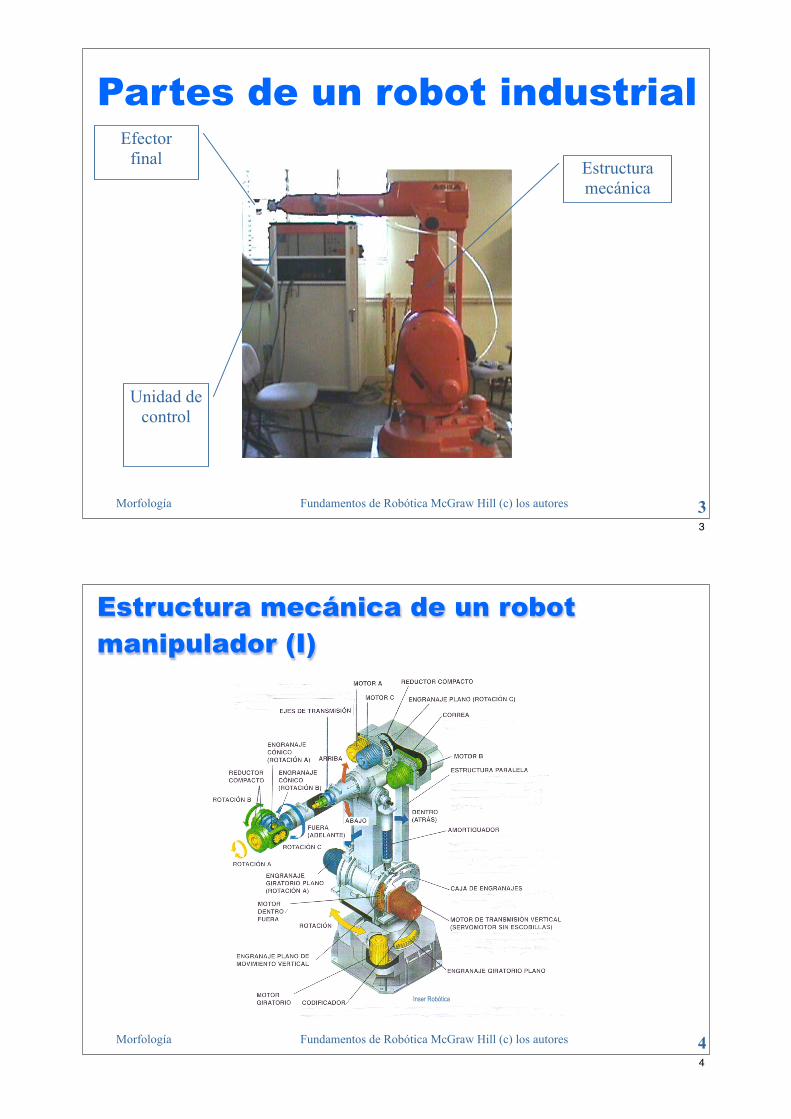
Ejemplos fórmula de Grubler
!: 3
n: 4
j: 4
fi: 1 (para todas)
NGDL=3x(4-4-1)+4x1=1
11
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 11
Ejemplos fórmula de Grubler
!: 3
n: 5
j: 5
fi: 1 (para todas)
NGDL=5x(5-5-1)+5x1=2
!: 3
n: 4
j: 4
fi: 1 (para todas)
NGDL=3x(4-4-1)+4x1=1
11
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 12
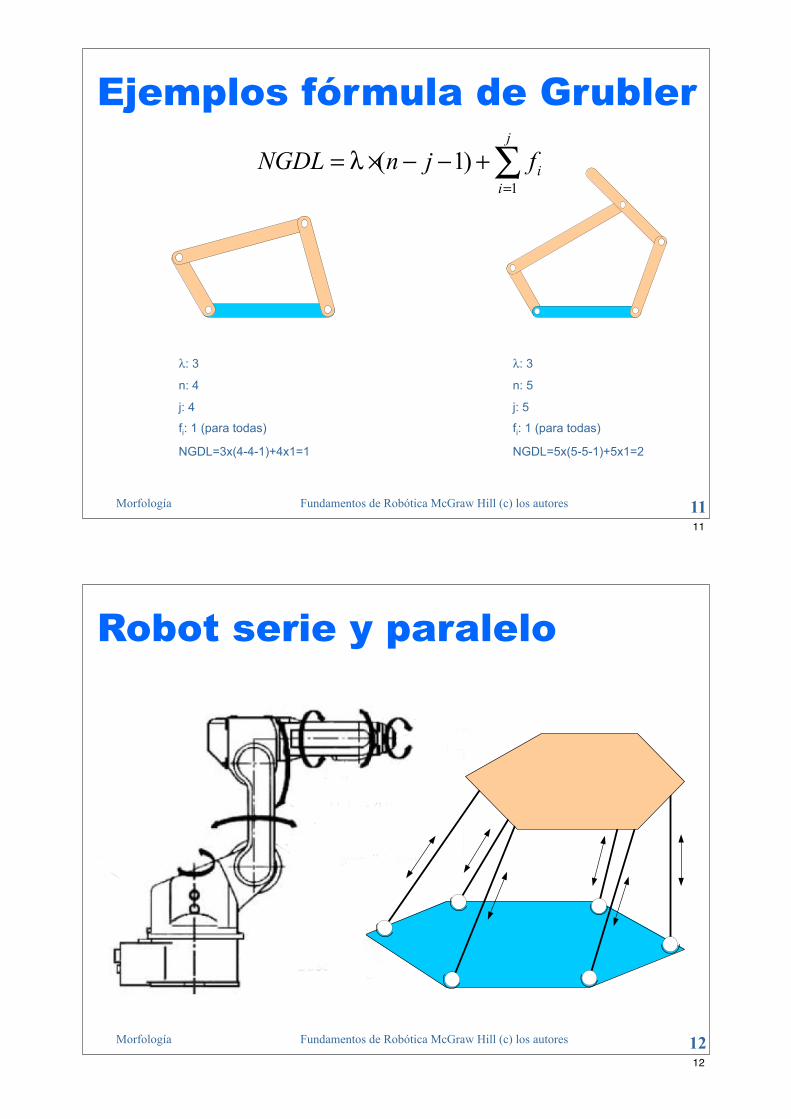
Robot serie y paralelo
12

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 13
Robot Cartesiano
• 3 articulaciones prismáticas
• Espacio de trabajo amplio.
• Precisión elevada• Velocidad baja.
13
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 13
Robot Cartesiano
• 3 articulaciones prismáticas
• Espacio de trabajo amplio.
• Precisión elevada• Velocidad baja.
13

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 13
Robot Cartesiano
• 3 articulaciones prismáticas
• Espacio de trabajo amplio.
• Precisión elevada• Velocidad baja.
13
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 13
Robot Cartesiano
• 3 articulaciones prismáticas
• Espacio de trabajo amplio.
• Precisión elevada• Velocidad baja.
13

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 14
Robot Cilíndrico
• Una articulación de Rotación en el eje vertical y dos prismáticas en z y en el radio.
• Se adapta bien a espacios de trabajo en círculo (robot en el centro de la célula)
14
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 14
Robot Cilíndrico
• Una articulación de Rotación en el eje vertical y dos prismáticas en z y en el radio.
• Se adapta bien a espacios de trabajo en círculo (robot en el centro de la célula)
14

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 15
Robot Esférico
• Dos articulaciones rotativas y una prismática
• Se adapta bien a espacios de trabajo en círculo (robot en el centro de la célula)
15
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 15
Robot Esférico
• Dos articulaciones rotativas y una prismática
• Se adapta bien a espacios de trabajo en círculo (robot en el centro de la célula)
15

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 16
Robot Scara• Scara (Selective
Compliance Assembly Robotic Arm)
• Dos articulaciones rotativas en el mismo plano y una prismática en el eje vertical.
• Especialmente diseñado para tareas en la dirección del eje vertical (p.e: ensamblado, pick&place)
16
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 16
Robot Scara
16

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 17
Robot Articular
• Tres articulaciones rotativas
• Trabaja bien en Areas esféricas pero se adpata en general a cualquier área.
• Es el más versatil
17
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 17
Robot Articular
17

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 18
Robot Paralelo
• Reparte por igual las cargas entre todos los actuadores
• Compensa los errores en transmisiones y actuadores.
• Volumen de trabajo reducido
18
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 18
Robot Paralelo
18

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 19
Configuraciones más frecuentes
•La mayor parte de los robots instalados son de configuración articular
•Las configuraciones cilíndrica y esférica están en desuso
19
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 20
Redundancia
Permite mejorar la accesibilidad-maniobrabilidadNúmero de ejes > Número de GDL
20

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 20
Redundancia
y aumentar el campo de trabajo
Número de ejes > Número de GDL
20
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 21
Transmisiones y reductores
21

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 21
Transmisiones y reductores
• Justificación– Reducción del momento de inercia (acercamiento de los
actuadores a la base)– Adaptar velocidades y pares de los actuadores– Conversión lineal-circular y viceversa
21
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 21
Transmisiones y reductores
• Justificación– Reducción del momento de inercia (acercamiento de los
actuadores a la base)– Adaptar velocidades y pares de los actuadores– Conversión lineal-circular y viceversa
• Características necesarias– Tamaño y peso reducido– Mínimos juegos u holguras– Gran rendimiento– Capaz de soportar funcionamiento continuo a un par
elevado
21

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 22
Sistemas de transmisión para robots
22
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 23
Reductores
23

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 23
Reductores
• Adaptación de velocidades– Relación de reducción elevada (100)– Par de salida nominal alto (punta muy alto)– Compactos (vajo volumen)– Ligeros– Bajo momento de inercia– Alto rendimiento (>80%)– Velocidad de entrada alta ( > 3000 rpm)
23
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 23
Reductores
• Adaptación de velocidades– Relación de reducción elevada (100)– Par de salida nominal alto (punta muy alto)– Compactos (vajo volumen)– Ligeros– Bajo momento de inercia– Alto rendimiento (>80%)– Velocidad de entrada alta ( > 3000 rpm)
• Precisión– Bajo juego angular (backslash)– Alta rigidez torsional
23

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 24
Reductores específicos
• Tendencia a ejes coaxiales frente a los paralelos o perpendiculares– Menor espacio– Mejor rendimiento
• Harmonic Driver (http://www.harmonicdrive.net/)
• Cyclo
24
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 25
Reductor Harmonic Drive• Concebido en 1955 por C.
Walton Musser– Patent Number 2,906,143
• 1962: Se usa en equipos espaciales
• 1971: Se usa para el Rover lunar (cada rueda estaba equipada con un motor DC de 186 w - 10,000 rpm y un harmonic drive 80:1)
25

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 26
Reductor Harmonic Drive
26
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 26
Reductor Harmonic Drive
26

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 26
Reductor Harmonic Drive
26
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 27
Reductor CYCLO
27

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 27
Reductor CYCLO
27
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 27
Reductor CYCLO
27

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 28
Robots de accionamiento directo (DD)
Robots de accionamiento eléctrico sin reductores
• Ventajas:– Disminuye fricción, elasticidad, histéresis – Posicionamiento rápido y preciso – Mayor controlabilidad (aunque más
compleja)– Simplificación del sistema mecánico
• Desventajas:– Necesidad de motores especiales (par
elevado a bajas revoluciones con alta rigidez)
– Reducción de la resolución del codificador de posición
– Las perturbaciones inciden directamente sobre el par del motor (sin verse divididas por el cuadrado de la reducción)
• Típicos en robots SCARA
28
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 29
Actuadores
• Tipos empleados en robótica:– Neumáticos (cilindros y motores)– Hidráulicos (cilindros y motores)– Eléctricos (DC , AC y Motores paso a paso)
• Características:– Potencia– Controlabilidad y buena respuesta dinámica– Peso y volumen (baja relación peso-potencia)– Precisión– Velocidad– Mantenimiento– Coste
• En la actualidad los robots comercializados usan mayoritariamente el accionamiento eléctrico
29

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 30
Comparación de actuadores
30
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 31
Problemas de los accionamientos por CC• Corriente por el rotor ! Dificultad de disipación
térmica ! limitación de potencia• Chispas "! Riesgo de explosión • Calentamientos a bajas velocidades con par alto • Desgaste escobillas (mantenimiento)• Dificultades de fabricación (bobinados…)
31

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 32
Ventajas de los Motores sin escobillas• Menor mantenimiento• Menor momento de inercia• Alto par a velocidad nula• Mejor rendimiento (No hay pérdidas en rotor)• Mejor disipación térmica (devanado en contacto
con carcasa)• Mejor relación potencia – peso o volumen• No riesgo de explosión• Menor ruido
32
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 33
Motores paso a paso imanes permanentes
33

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 34
Sensores internos
34
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 35
Encoder incremental• Disco rotativo con 2 series de bandas concéntricas (A-B) translúcida/opaca
que interceptan el paso de la luz en parejas fotodiodo-fotoreceptor.• Dan un número de impulsos proporcional al ángulo girado.• Precisan de un contador de impulsos y de una posición de puesta a cero
(Banda C).• La resolución depende del número de franjas de las bandas (100.000 pulso/
vuelta)• Utilizando los flancos de subida y bajada de los 2 canales se multiplica por 4
la resolución.
35

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 36
Encoder. Detección del sentido de giroBiestable D: Copia la entrada (A) en la salida (Q), cuando el reloj (B) tiene flanco positivo
36
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 37
Encoder absoluto• Disco rotativo con n series de bandas concéntricas
translúcida/opaca que interceptan el paso de la luz en parejas fotodiodo-fotoreceptor.
• Dan un valor binario asociado a la posición (código binario o Gray)
• La resolución depende del número de bandas n (12 a 16 bits -> 65536 =0.00054º)
37

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 38
Resolver
• Bobinados móviles (con el ángulo a medir) situados en planos perpendiculares se excitan con corriente senoidal (400 Hz)
• Dos bobinados estáticos situados en planos perpendiculares, y concéntricos al rotor, recogen corrientes inducidas, actuando como el secundario de un transformador.
• Al excitar las bobinas del rotor con V sen wten el estator se induce: E1= V sen wt cos θ E2= V sen wt sen θ
38
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 39
Sensores externos
Otros sensores internos de robots
• Velocidad: Tacogeneratriz
• Fuerza:Galgas o piezoelectricos
39

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 40
Elementos terminales
Los elementos terminales, también llamados efectores finales (end effector) son los encargados de interaccionar directamente con el entorno del robot. Pueden ser tanto elementos de aprehensión como herramientas.
Son independientes del robot
40
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 41
Elementos de sujección
41

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 42
Pinzas neumáticas
42
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 43
Pinzas neumáticas
43

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 44
Ventosa de vacío
44
Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Ventosa de vacío
4545

Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Otros Elementos de Sujeción
4646
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 47
Herramientas terminales
47

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 48
Robot con Pinza soldadura puntos
IRB 6600ID (ABB)
• Cableado interno
• Alcance 2.75 m
• Carga 170 Kg
48
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 49
Robot con Pinza soldadura puntos
49

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 50
Antorcha de soldadura al arco
50
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 51
Robot de soldadura al arco
51

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 52
Pistolas de pintura
52
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 53
Pistolas de pintura
53

Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Corte por chorro de agua
5454
Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Corte por Plasma
5555

Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Corte por laser
5656
Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Soldadura por laser
5757

Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Maquinado
5858
Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Pulido
5959

Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Toma de Medidas
6060
Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Suministro de Material Adhesivo
6161

Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Robot Atornillador
6262
Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Desbarbado
6363

Morfología Fundamentos de Robótica McGraw Hill (c) los autores
Pinza Universal
6464
Morfología Fundamentos de Robótica McGraw Hill (c) los autores 65
Controlador
• Multiprocesador• Bus PCI• Memoria masiva por
HD o Flash• 2040 I/O 24vt o relé• 2x0-10v, 3x ±10v
1x4-20 mA• 3xRS232 ó RS422• Ethernet,Devicenet,
Interbus, Profibus DP
65

Morfología Fundamentos de Robótica McGraw Hill (c) los autores 66
Armario de control
66
Recommended