TEMA I. ECUAŢII DIFERENŢIALE DE ORDINUL I SUBIECTUL I.
Noţiune de ecuaţie diferenţială. Metoda izoclinelor
1. Noţiuni generale despre ecuaţii diferenţiale
2. Metoda izoclinelor
Obiective:
– Să cunoască noţiunile de ecuaţie diferenţială, ecuaţie diferenţială
ordinară, ordinul ecuaţiei, soluţie a ecuaţiei diferenţiale, curbă
integrală a ecuaţiei diferenţiale, domeniu de definiţie, integrală a
ecuaţiei diferenţiale.
– Să poată determina ordinul, soluţia, curbele integrale, domeniul de
definiţie, integrala, izoclinele ecuaţiei diferenţiale.
– Să cunoască metoda izoclinelor.
– Să poată găsi soluţia ecuaţiei diferenţiale prin metoda izoclinelor.
1. Noţiuni generale despre ecuaţii diferenţiale
Definiţia 1: Ecuaţia funcţională, care conţine o funcţie necunoscută,
derivatele acesteia şi variabilele independente, se
numeşte ecuaţie diferenţială.
Dacă funcţia necunoscută din ecuaţia diferenţială este de o singură
variabilă, atunci ecuaţia se numeşte
ecuaţie diferenţială ordinară.
Dacă notăm prin x variabila independentă, iar prin y(x) – funcţia
necunoscută, atunci ecuaţia diferenţială ordinară poate fi scrisă sub
forma
.0))(),...,('),(,( )( xyxyxyxF n (1)
Definiţia 2: Ordinul cel mai mare al derivatei funcţiei necunoscute ce
intervine în ecuaţia diferenţială se numeşte ordinul
ecuaţiei.
Definiţia 3: Funcţia )(xy se numeşte soluţie a ecuaţiei
diferenţiale (1) pe intervalul ,I dacă este definită pe
acest interval împreună cu toate derivatele sale până la
ordinul n şi pentru Ix verifică ecuaţia (1). Graficul
2
soluţiei se numeşte curba integrală a ecuaţiei diferenţiale
(1).
Vom spune că ecuaţia diferenţială se integrează în
cuadraturi, dacă soluţiile ei pot fi exprimate cu ajutorul unor
combinaţii de funcţii elementare şi algebrice, şi a unui număr finit
de operaţii de integrare. J. Liouville a demonstrat că există multe
ecuaţii diferenţiale, care nu se integrează în cuadraturi. În cele ce
urmează vom studia cîteva tipuri de ecuaţii diferenţiale, ce pot fi,
totuşi, întegrate în cuadraturi. Astfel de ecuaţii se întîlnesc
frecvent în aplicaţii, ceea ce justifică într-o măsură oarecare
studierea lor. Vor fi expuse şi unele metode ale teoriei calitative a
ecuaţiilor diferenţiale, ce permit studierea soluţiilor ecuaţiei
diferenţiale fără a integra efectiv ecuaţia. Vom începe studiul teoriei calitative a ecuaţiilor diferenţiale cu
ecuaţii diferenţiale ordinare de ordinul întâi:
.0)',,( yyxF
Definiţia 4: Ecuaţia diferenţială rezolvată în raport cu derivata
),(' yxfy (2)
se mai numeşte ecuaţie diferenţială de formă normală.
Domeniul de definiţie al funcţiei ),( yxf se numeşte domeniu de
definiţie al ecuaţiei (2).
Vom nota cu nk RDRDC , mulţimea funcţiilor definite şi
continue pe domeniul D împreună cu derivatele lor parţiale până la
ordinul k inclusiv.
Definiţia 5: Funcţia ),,( yxU continuă pe domeniul ,2RD se
numeşte integrală a ecuaţiei diferenţiale (2) pe domeniul
D, dacă ea capătă valori constante de-a lungul fiecărei curbe
integrale din domeniul D.
Astfel, curbele integrale din domeniul D sunt situate pe liniile de
nivel cyxU ),( ale funcţiei U.
Teoremă: Funcţia 21 , RDCU este o integrală a ecuaţiei (2) pe
domeniul D dacă şi numai dacă
.,0),(),(),(
Dyxyxfy
yxU
x
yxU
Exemplul 1. Fie dată ecuaţia diferenţială

3
),(' yfy unde
02
,03)(
21
32
ypentruy
ypentruyyf
şi funcţiile:
a) ;)1()( 2 xxy
b)
.11
,10)(
2xpentrux
xpentruxy
Să se determine intervalele pe care aceste funcţii sunt soluţii ale
ecuaţiei date.
Rezolvare:
a) Deoarece 0xy pentru orice ,Rx avem
.12)1(22))(( 21
221
xxxyxyf
La rândul său ).1(2 xy Din ecuaţia dată egalitatea
,12)1(2 xx care este justă numai pentru .1x
Deci, funcţia 2)1()( xxy este soluţie doar pe semiintervalul .,1
b) Calculăm derivata funcţiei:
.112
,10
xpentrux
xpentruy (3)
Deoarece 0)( xy pentru orice ,Rx avem
21
2))(( xyxyf .
Substituind expresia pentru y(x), obţinem
.112
,10
xpentrux
xpentruxyf (4)
Comparând (3) şi (4), observăm, că y(x) este o soluţie pe R.
2. Metoda izoclinelor
Fiecărei ecuaţii diferenţiale (2) i se asociază un obiect geometric:
un câmp de direcţii.
4
Definiţia 6: Câmp de direcţii pe domeniul 2RD se numeşte orice
aplicaţie ce pune în corespondenţă fiecărui
punct din D o dreaptă, care trece prin acest punct.
Definiţia 7: Curba se numeşte curbă integrală a câmpului de
direcţii, dacă în orice punct al ei există tangentă, care
coincide cu dreapta câmpului de direcţii în acest punct.
Ecuaţia (2) determină pe domeniul său de definiţie un câmp de
direcţii în felul următor: punctului ),( yx i se pune în corespondenţă
dreapta, care trece prin acest punct şi are coeficientul unghiular
).,( yxfk În cazul când câmpul de direcţii este definit de o ecuaţie
diferenţială (2 curbele integrale ale acestui câmp de direcţii şi curbele
integrale ale ecuaţiei diferenţiale respective coincid.
Observaţia 1: Nu orice câmp de direcţii poate fi definit cu ajutorul
unei ecuaţii diferenţiale (2).
Această interpretare geometrică a ecuaţiei diferenţiale (2) ne
permite să construim graficele soluţiilor ei aproximativ. O metodă
efectivă de trasare a câmpului de direcţii şi a curbelor integrale ale
acestei ecuaţii este metoda izoclinelor.
Definiţia 8: Vom numi izoclină a ecuaţiei diferenţiale (2) mulţimea
punctelor din plan, în care dreptele câmpului
corespunzător de direcţii sînt paralele.
Izoclina k a acestei ecuaţii diferenţiale este definită de relaţia
.),( kyxf Atribuind parametrului k diferite valori, obţinem mai multe
izocline, cu ajutorul cărora construim aproximativ curbele integrale.
Observaţiile:
2) Izoclina „zero” 0),( yxf cuprinde mulţimea punctelor critice ale
soluţiilor şi, deci, conţine punctele de extrem ale lor.
3) Mulţimea punctelor de inflexiune ale graficelor soluţiilor poate fi
găsită din egalitatea ,0)( xy care ia forma
.0),(
yxf
y
f
x
f
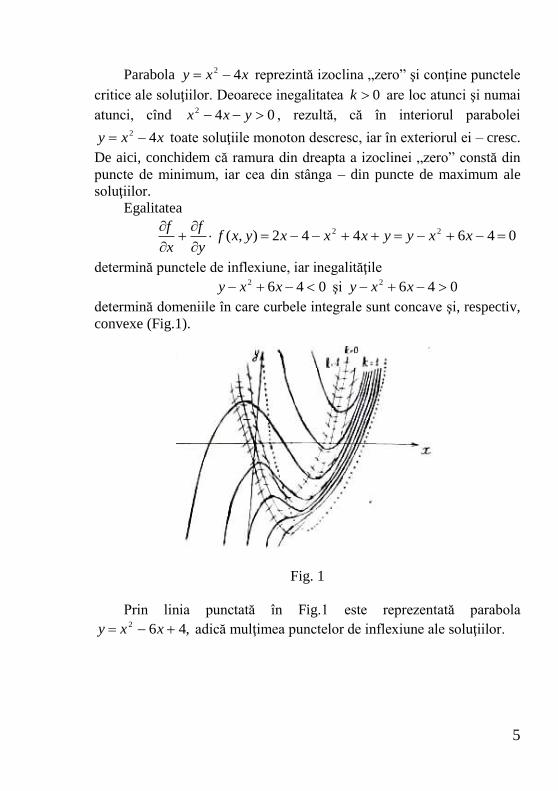
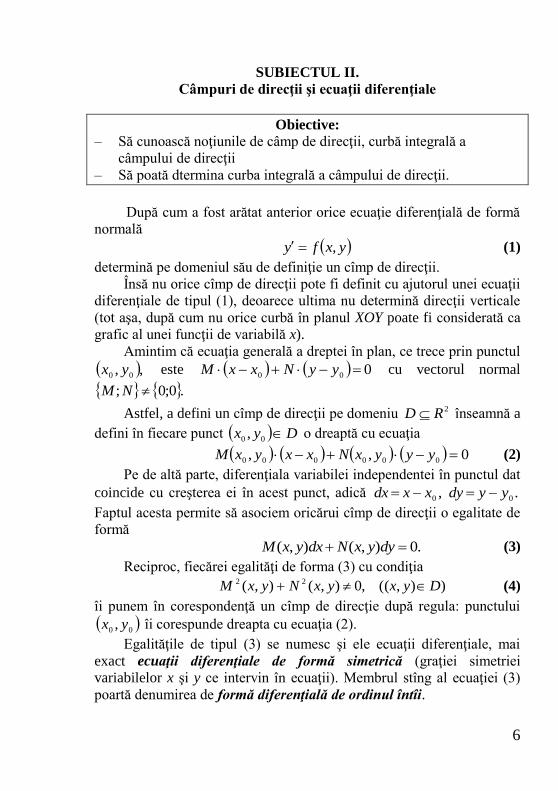
Exemplul 2. Să se construiască aproximativ curbele integrale ale
ecuaţiei diferenţiale
.42 yxxy
Rezolvare: Izoclina k satisface relaţia kyxx 42 şi reprezintă o
parabolă cu axa de simetrie .2x
5
Parabola xxy 42 reprezintă izoclina „zero” şi conţine punctele
critice ale soluţiilor. Deoarece inegalitatea 0k are loc atunci şi numai
atunci, cînd 042 yxx , rezultă, că în interiorul parabolei
xxy 42 toate soluţiile monoton descresc, iar în exteriorul ei – cresc.
De aici, conchidem că ramura din dreapta a izoclinei „zero” constă din
puncte de minimum, iar cea din stânga – din puncte de maximum ale
soluţiilor.
Egalitatea
046442),( 22
xxyyxxxyxf
y
f
x
f
determină punctele de inflexiune, iar inegalităţile
0462 xxy şi 0462 xxy
determină domeniile în care curbele integrale sunt concave şi, respectiv,
convexe (Fig.1).
Fig. 1
Prin linia punctată în Fig.1 este reprezentată parabola
,462 xxy adică mulţimea punctelor de inflexiune ale soluţiilor.
6
SUBIECTUL II.
Câmpuri de direcţii şi ecuaţii diferenţiale
Obiective:
– Să cunoască noţiunile de câmp de direcţii, curbă integrală a
câmpului de direcţii
– Să poată dtermina curba integrală a câmpului de direcţii.
După cum a fost arătat anterior orice ecuaţie diferenţială de formă
normală
yxfy , (1)
determină pe domeniul său de definiţie un cîmp de direcţii.
Însă nu orice cîmp de direcţii pote fi definit cu ajutorul unei ecuaţii
diferenţiale de tipul (1), deoarece ultima nu determină direcţii verticale
(tot aşa, după cum nu orice curbă în planul XOY poate fi considerată ca
grafic al unei funcţii de variabilă x).
Amintim că ecuaţia generală a dreptei în plan, ce trece prin punctul
,, 00 yx este 000 yyNxxM cu vectorul normal
.0;0; NM
Astfel, a defini un cîmp de direcţii pe domeniu 2RD înseamnă a
defini în fiecare punct Dyx 00
, o dreaptă cu ecuaţia
0,,000000 yyyxNxxyxM (2)
Pe de altă parte, diferenţiala variabilei independentei în punctul dat
coincide cu creşterea ei în acest punct, adică .,00
yydyxxdx
Faptul acesta permite să asociem oricărui cîmp de direcţii o egalitate de
formă
.0),(),( dyyxNdxyxM (3)
Reciproc, fiecărei egalităţi de forma (3) cu condiţia
)),((,0),(),( 22 DyxyxNyxM (4)
îi punem în corespondenţă un cîmp de direcţie după regula: punctului
00
, yx îi corespunde dreapta cu ecuaţia (2).
Egalităţile de tipul (3) se numesc şi ele ecuaţii diferenţiale, mai
exact ecuaţii diferenţiale de formă simetrică (graţiei simetriei
variabilelor x şi y ce intervin în ecuaţii). Membrul stîng al ecuaţiei (3)
poartă denumirea de formă diferenţială de ordinul întîi.

7
În calitate de necunoscute ale ecuaţiei diferenţiale (3) pe domeniul
unde are loc condiţia (4) vom considera curbele integrale ale cîmpului
de direcţii respectiv.
Domeniul comun de definiţie ale funcţiilor M şi N este numit
domeniu de definiţie a ecuaţiei diferenţiale (3).
Teoremă: Curba diferenţială din domeniul
0,,:, 22 yxNyxMyxD este o curbă integrală a
cîmpului de direcţii, definit de ecuaţia diferenţială (3), dacă
şi numai dacă pentru orice parametrizare a ei
;,0),(
),(22
tyx
tyy
txx (5)
are loc identitatea
.;0,)(, ttdytytxNtdxtytxM (6)
Observaţie: Menţionăm că ecuaţia (3) nu defineşte un cîmp de direcţii
pe locul geometric al punctelor, definit de ecuaţiile
.0,, yxNyxM Însă, dacă aceste ecuaţii determină
o curbă diferenţiabilă, atunci orice parametrizare (5) a ei
verifică identitatea (6).
Ţinînd seama de cele expuse mai sus, vom numi curbă integrală a
ecuaţiei (3) orice curbă diferenţiabilă , o parametrizare (5) a căreia
verifică identitatea (6). E lesne de arătat că definiţia de mai sus nu
depinde de parametrizarea aleasă.
Astfel, a rezolva o ecuaţie diferenţială de forma simetrică înseamnă
a găsi mulţimea tuturor curbelor integrale ale ei.
Definiţia 1: Vom spune că funcţia U, definită şi continuă pe domeniul
,2RD este o integrală a ecuaţiei diferenţiale (3) pe
domeniul D, dacă ea capătă valori constante de-a lungul
fiecărei curbe integrale a acestei ecuaţii din domeniul D.
Între ecuaţiile diferenţiale de formă normală (1) şi ecuaţiile
diferenţiale de formă simetrică (3) există următoarea relaţie.
Deoarece ,dx
dyy ecuaţia diferenţială (1) poate fi scrisă sub
forma (3)
.0, dydxyxf (7)
Conform definiţiei din subiectul precedent, fiecare curbă integrală
a ecuaţiei (1) reprezintă graficul unei soluţii ,, Ixxy şi,

8
deci, are forma .:, Ixxx Considerînd parametrizarea
,,, Ittytx cochidem că este o curbă integrală a
ecuaţiei diferenţiale (7). Reciproc, orice curbă integrală a ecuaţiei (7)
este graficul unei soluţii a ecuaţiei (1).
Astfel, curbele integrale ale ecuaţiilor (1) şi (7) coincid.
În acelaşi timp, orice ecuaţie de formă simetrică (3) cu condiţia (4)
poate fi redusă la forma normală
),(
),(
yxN
yxM
dx
dy
pe acel domeniu unde .0, yxN
9
SUBIECTUL III.
Problema Cauchy. Existenţa şi unicitatea soluţiei
1. Problema Cauchy
2. Dependenţa soluţiei de parametru şi date iniţiale
Obiective:
– Să cunoască forma generală a problemei Cauchy pentru ecuaţia
diferenţială de formă normală.
– Să cunoască noţiunea de soluţie a problemei Cauchy.
– Să cunoască Teorema Peano de existenţă a soluţiei şi Teorema
Cauchy de unicitate a soluţiei.
– Să poată aplica Teorema Peano de existenţă a soluţiei şi Teorema
Cauchy de unicitate a soluţiei.
– Să poată demonstra unicitatea şi existenţa soluţiei problemei
Cauchy.
– Să poată determina soluţia problemei Cauchy.
– Să cunoască noţiunile de prelungire a soluţiei, soluţie
neprelungibilă, curbă integrală neprelungibilă, punct de existenţă al
ecuaţiei diferenţiale, punct de unicitate al ecuaţiei diferenţiale, punct
singular al ecuaţiei diferenţiale, curbă integrală singulară, soluţie
singulară, integrală generală a ecuaţiei diferenţiale, soluţie generală
a ecuaţiei diferenţiale.
– Să poată determina natura punctelor unei ecuaţii diferenţiale, curba
integrală singulară, soluţiile singulare, integralele generale a ecuaţiei
diferenţiale, soluţiile generale a ecuaţiei diferenţiale.
1. Problema Cauchy
Fie mulţimea RD dreptunghiul (mulţime compactă) de forma
bxxattxtD 00
,,
şi funcţia .: RDf
Definiţia 1: Problema Cauchy ataşată unei ecuaţii diferenţiale de ordin
întâi constă în găsirea unei funcţii de clasă ),(,1 txxC
definită pe un interval atatI 00
, satisfăcând
,,)),(,()(0
ItIttxtftx şi .)(00
xtx Vom nota
o astfel de problemă prin

10
.)(
),,(
00xtx
xtfx (1)
Definiţia 2: O funcţie RIx : cu proprietăţile de mai sus se numeşte
soluţie pentru problema (1).
Distingem mai multe tipuri de soluţii pentru problema (1). Astfel,
dacă ,,00
ttI soluţia x se numeşte soluţie globală, în caz
contrar locală. Dacă ,0
tI sau ,,0tI atunci x se numeşte
soluţie la dreapta. Analog, dacă 0
, tI sau ,,0
tI atunci x se
numeşte soluţie la stânga, în timp ce dacă xItI ,supinf0 se
numeşte soluţie bilaterală.
Definiţia 3: Funcţia ),( xtff definită pe D, satisface condiţia
Lipschitz locală în raport cu variabila x, dacă pentru orice
punct Dxt 00
, există o vecinătate ,,00
DxtV astfel
încât oricare ar fi xt, şi xt, din 00 ,xtV are loc
inegalitatea
xxLxtfxtf ),(),( (2)
constanta 0L depinzând, în general, de punctul .,00
xt
În acest caz vom spune că f este local lipschitziană în raport cu
variabila x. Dacă inegalitatea (2) este satisfăcută cu aceeaşi constantă
pentru orice pereche de puncte xt, şi xt, din D, vom spune că f
satisface pe D condiţia Lipschitz globală în raport cu variabila x.
Observaţia 1: Dacă x
f
există şi este local mărginită în D, condiţia
Lipschitz amintită este satisfăcută.
Teoremă: (Teorema de existenţă şi unicitate a soluţiei problemei
Cauchy pentru ecuaţiile diferenţiale de ordinul întâi)
Fie
xtfx , (3)
o ecuaţie diferenţială. Vom presupune că funcţia xtf , este
definită pe o mulţime deschisă Г din planul P de variabile
t şi x . Referitor la funcţia f vom presupune că ea
împreună cu derivata sa parţială x
f
sunt funcţii continui
pe toată mulţimea deschisă .Г Teorema afirmă, că:

11
1. pentru orice punct 00 , xt din mulţimea Г există o
soluţie tx a ecuaţiei (3) ce verifică condiţia
00
xt (4)
2. dacă două soluţii tx şi tx a ecuaţiei (3)
coincid măcar pentru o valoare ,0
tt adică dacă
,00
tt atunci aceste două soluţii sunt identic
egale pentru toate valorile variabilei ,t pentru care ele
sunt definite.
Numerele 00 , xt se numesc valori iniţiale pentru soluţia ,tx
iar relaţia (4) - condiţia iniţială pentru această soluţie. Soluţia tx
satisface condiţia iniţială (4) sau se mai spune că ea are valorile
iniţiale ., 00 xt Afirmaţia, că soluţia tx satisface condiţia iniţială
(4) (sau că are valorile iniţiale 00 , xt ) presupune, că intervalul
21rtr
de definiţie a soluţiei tx conţine punctul .0t
Teorema dată afirmă, că coordonatele oricărui punct 00
, xt din
mulţimea Г are valori iniţiale pentru o soluţie a ecuaţiei (3) şi că două
soluţii ale acestei ecuaţii coincid, dacă au aceleaşi valori iniţiale.
Sensul geometric al acestei teoreme constă în faptul că prin fiecare
punct 00 , xt a mulţimii Г trece una şi numai una singură curbă
integrală a ecuaţiei (3).
Demonstraţie:
Ideile de bază Primul pas în demonstrarea teoremei prin metoda aproximaţiilor
successive este trecerea de la ecuaţia diferenţială la ecuaţia integrală,
care se formulează în felul următor:
A. Fie tx - o soluţie a ecuaţiei (3), definită pe intervalul
21
rtr astfel încât se satisface identitatea
ttft , (5)
şi fie 00
xt - condiţia iniţială (4) pe care o satisface soluţia.
Atunci pentru funcţia ,t pe tot intervalul 21
rtr are loc
identitatea integrală
t
t
dfxt
0
,0
(6)
12
Reciproc: dacă pentru o oarecare funcţie continuă t pe
intervalul 21
rtr se satisface identitatea (6), atunci funcţia
t - diferenţiabilă, este soluţie a ecuaţiei (3) şi satisface
condiţia iniţială (4). Deci, ecuaţia integrală (6) este echivalentă
cu ecuaţia diferenţială (5) cu condiţia iniţială (4).
Vom demonstra aceasta: Vom presupune, pentru început, că se satisface relaţia (6).
Substituind în ea variabila t prin valoarea sa ,0
t obţinem
.00
xt Deci din (6) rezultă (4). Partea dreaptă a identităţii
(6) evident este diferenţiabilă după ,t şi respectiv este
diferenţiabilă după t şi partea ei stîngă.
Vom presupune acum, că se satisfac relaţiile (4) şi (5).
Integrînd relaţia (5) în limitele de la 0t pînă la ,t obţinem
.,
0
0
t
t
dftt
Pe baza relaţiei (4), obţinem astfel relaţia (6).
Vom introduce acum unele notaţii folosite în demonstraţia teoremei.
B. Fie tx o astfel de funcţie continuă, definită pe un interval
oarecare ,21
rtr încît graficul ei este totalmente amplasat în
mulţimea deschisă Г, şi 0t un punct oarecare din segmentul
.21
rtr Atunci, folosind partea dreaptă a identităţii (6),
funcţiei t îi poate fi pusă în corespondenţă funcţia ,t
definită pe tot pe segmentul ,21
rtr cu ajutorul egalităţii
t
t
dfxt
0
,0
* (7)
(graficul funcţiei t* poate să nu treacă prin mulţimea Г ).
Aşadar, partea dreaptă a identităţii (6) poate fi privită ca un
operator, ce pune în corespondenţă funcţiei funcţia .*
Notând acest operator prin A, vom scrie relaţia (7) sub forma:
A* (8)
Folosind operatorul A, ecuaţia (6) poate fi scrisă sub forma
A (9)
13
C. Fie t - o funcţie continuă, definită pe segmentul .21
rtr
Vom numi norma a acestei funcţii, maximul modulului
ei
trtr
21
max
Dacă t şi t sunt două funcţii continui, definite pe
segmentul ,21
rtr atunci norma diferenţei lor
tt este un număr nenegativ, ce determină, cît de mult
se deosebesc aceste funcţii. Dacă numărul este mic,
atunci funcţiile şi sunt asemenea. Egalitatea
0 are loc atunci şi numai atunci cînd funcţiile şi
identic coincid. Folosind noţiunea de normă, poate fi
formulată condiţia de convergenţă uniformă a unui şir de
funcţii continui. Fie
,...,...,,10
ttti
(10)
un şir de funcţii continui, definite pe segmentul .21
rtr
Şirul (10) converge uniform la funcţia , definită pe acelaşi
segment ,21
rtr dacă
.0lim
ii
Pentru ca şirul (10) să conveargă uniform, este suficient
să se satisfacă inegalităţile
,1 iii
a
unde numerele ,...,...,,10 i
aaa formează o serie convergentă.
Înainte de a trece la demonstraţia detaliată a teoremei, vom expune
pe scurt conceptul metodei aproximaţiilor succesive, ce se foloseşte la
soluţionarea ecuaţiei (9).
Se construieşte şirul
,...,...,,10
ttti
(11)
funcţiilor continue definite pe un segment ,21
rtr care conţine
punctul .0t Fiecare funcţie din şirul (11) se defineşte prin precedenta cu
ajutorul egalităţii
,...2,1,0,1
iAii
, (12)

14
Dacă graficul funcţiei i trece prin mulţimea Г, atunci funcţia
1i
este definită prin egalitatea (12), iar pentru a determina următoarea
funcţie ,2i trebuie ca şi graficul 1i
să treacă prin mulţimea Г. Acest
lucru se obţine, dacă vom alege segmentul 21
rtr destul de scurt.
În continuare, prin micşorarea segmentului 21
rtr se poate
obţine ca pentru şirul (11) să se satisfacă inegalităţile
,...,3,2,1,11
ikiiii
(13)
unde .10 k Din egalităţile (13) rezultă inegalităţile
,...3,2,1,011
ik i
ii
şi în aşa mod şirul (11) converge uniform (vezi C.). Iar apoi, uşor se
determină că limita a şirului (11) satisface condiţia (9).
Demonstraţia teoremei:
Existenţa. Valorile iniţiale 0t şi
0x a soluţiei căutate a ecuaţiei (3) sunt
coordonatele punctului 00
, xt din mulţimea Г. Vom alege un
dreptunghi oarecare D cu centrul în punctul 00
, xt care se conţine în
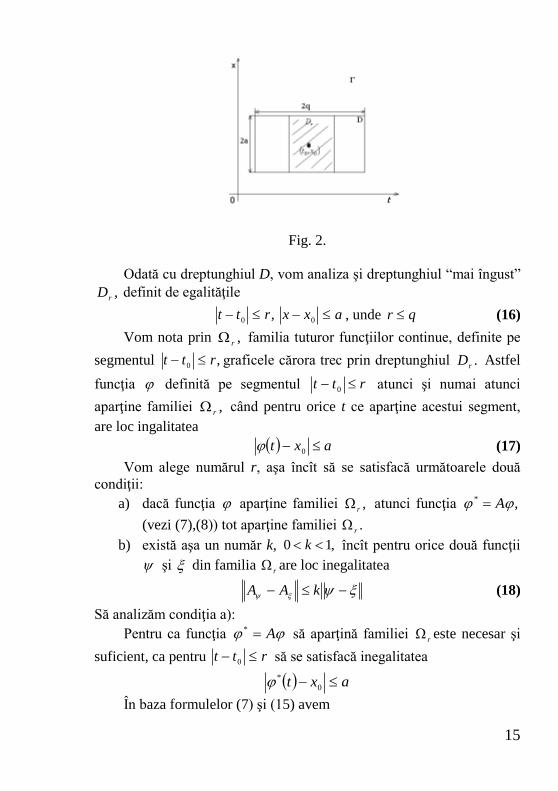
mulţimea Г (Fig. 2.).
Lungimea laturii orizontale (paralele axei t) a dreptunghiului D, o
vom nota prin ,2q iar lungimea laturii verticale prin .2a Astfel, punctul
xt, va aparţine dreptunghiului D dacă şi numai dacă se vor satisface
inegalităţile:
qtt 0 , axx 0 . (14)
Deoarece dreptunghiul D este o mulţime închisă din Г, atunci
funcţiile continue în el xtf , şi x
xtf
, sunt mărginite, şi există aşa
numere pozitive M şi K, a.î. pentru t şi ,x care satisfac condiţiile (14),
au loc inegalităţile
,, Mxtf
kx
xtf
,. (15)
15
Fig. 2.
Odată cu dreptunghiul D, vom analiza şi dreptunghiul “mai îngust”
,r
D definit de egalităţile
,0
rtt axx 0 , unde qr (16)
Vom nota prin ,r familia tuturor funcţiilor continue, definite pe
segmentul ,0
rtt graficele cărora trec prin dreptunghiul .r
D Astfel
funcţia definită pe segmentul rtt 0 atunci şi numai atunci
aparţine familiei ,r când pentru orice t ce aparţine acestui segment,
are loc ingalitatea
axt 0
(17)
Vom alege numărul r, aşa încît să se satisfacă următoarele două
condiţii:
a) dacă funcţia aparţine familiei ,r atunci funcţia ,* A
(vezi (7),(8)) tot aparţine familiei .r
b) există aşa un număr k, ,10 k încît pentru orice două funcţii
şi din familia r are loc inegalitatea
kAA (18)
Să analizăm condiţia a):
Pentru ca funcţia A* să aparţină familiei r este necesar şi
suficient, ca pentru rtt 0 să se satisfacă inegalitatea
axt 0
*
În baza formulelor (7) şi (15) avem

16
.))(,()(
0
0
* Mrdfxt
t
t
De unde rezultă că pentru
M
ar (19)
ecuaţia a) se satisface.
Vom analiza acum condiţia b). Avem:
,))(,()(
0
0
*
t
t
dfxt
.))(,()(
0
0
*
t
t
dfxt
Dacă scădem din prima egalitate a doua, atunci obţinem:
dff
dfftt
t
t
t
t
0
0
)(,()(,(
)(,()(,()()( **
(20)
Vom studia acum ultima expresie de sub semnul integralei folosind
formula lui Lagrange şi a doua din inegalităţile (15):
))()((
))()((),(
)(,()(,(
K
x
fff
(21)
Unde este un număr cuprins între )( şi )( şi deci care
satisface inegalitatea ax 0
.
Din (20) şi (21) rezultă că:
KrAA**
Deci condiţia b) se satisface, dacă numărul Krk este mai mic
decît 1, adică dacă:
kr
1 (22)
Aşadar, dacă numărul r satisface inegalităţile (16), (19) şi (22),
atunci pentru familia r se satisfac condiţiile a) şi b).
17
În continuare vom considera că numărul r este ales astfel încât
pentru el au loc inegalităţile (16), (19) şi (22).
Vom construi acum şirul
,...,,...,,10 i
(23)
de funcţii, definite pe segmentul ,0
rtt cu
,00
xt (24)
,...2,1,0,1
iAii
(25)
Conform condiţiei a), deoarece funcţia (24) aparţine familiei ,r
atunci şi toate funcţiile şirului (23) aparţin acestei familii.
În continuare, conform (17) avem:
.max0101
0
axrtt
În baza formulei (18) obţinem:
,111
iiiiii
kAA
de unde rezultă că
,...2,1,0,1
iak i
ii
Astfel, conform punctului C., şirul (23) converge uniform pe
segmentul rtt 0 la o funcţie continuă . Deoarece toate funcţiile
şirului (23) aparţin familiei ,r atunci comform (17) şi funcţia
aparţine acestei familii. Vom arăta, că funcţia satisface ecuaţia (9).
Pentru aceasta vom observa că şirul ,...,...,,10 i
AAA converge
uniform la funcţia .A Într-adevăr, avem:
.ii
kAA
Trecînd în relaţia (25), la limită cu ,i obţinem: . A
Deci, existenţa soluţiei tx a ecuaţiei (3), ce satisface condiţia
iniţială (4), este demonstrată şi în acelaşi timp s-a stabilit că soluţia
tx este definită pe intervalul rtt 0 , unde r este un număr
arbitrar, ce satisface inegalităţile (16), (19) şi (22).
Unicitatea. Fie tx şi tx două soluţii ale ecuaţiei (3), ce au
valorile iniţiale comune 00
, xt şi 21 rtr intervalul ce este intersecţia
intervalelor de existentă a soluţiilor şi , evident că .201
rtr
18
Vom arăta, că dacă soluţiile t şi t coincid într-un punct
oarecare 1t din intervalul
21 rtr , atunci ele coincid şi pe un interval
oarecare ,1
rtt unde r este un număr pozitiv mic. Fie
,111ttx atunci mărimile
11 , xt pot fi considerate valori
iniţiale pentru ambele soluţii tx şi .tx În acest sens, punctul
11
, xt nu se deosebeşte de punctul ,,00
xt şi de aceea vom păstra
pentru punctul 11
, xt notaţia ,,00
xt ceea ce ne va permite să păstrăm
şi celelalte notaţii. Trecînd de la ecuaţia diferenţială (3) la ecuaţia
integrală (6), obţinem pentru ambele funcţii t şi t egalităţi
integrale, care în formă operatorială se scriu
., AA (26)
Vom alege, ca şi mai sus, în mulţimea deschisă Г dreptunghiul D
cu centrul în punctul ,,00
xt iar apoi şi dreptunghiul r
D astfel încât
numărul r în afară de inegalităţile (16), (19), şi (22) să satisfacă şi
condiţia că pentru rtt 0 funcţiile t şi t sunt definite şi
satisfac inegalităţile:
.,00
axtaxt
Acest lucru este posibil, deoarece funcţiile t şi t sunt
contunui. Atunci aceste funcţii, examinate pe segmentul ,0
rtt
aparţin familiei r şi deci, conform inegalităţii (18) şi relaţia (26)
obţinem:
, kAA
ceea ce este posibil atunci şi numai atunci când ,0 adică când
funcţiile t şi t coincid pe segmentul .0
rtt
Vom demonstra acum, că funcţiile t şi t coincid întreg
intervalul .21
rtr Vom presupune contrariul, şi anume că există un
punct *t din intervalul 21
rtr pentru care .** tt Evident, că
.0
* tt Vom considera că .0
* tt
Vom nota prin N, mulţimea tuturor punctelor t a segmentului
,*
0ttt pentru care tt şi vom demonstra, că mulţimea N
este închisă. Într-adevăr: fie ,...,...,21
un şir de puncte din mulţimea N,

19
ce converge la un punct oarecare . Atunci ii
şi de aceea, pe
baza continuităţii funcţiilor t şi t obţinem:
,limlim
ii
ii
adică punctul de asemenea aparţine mulţimii N.
Vom nota prin 1t marginea superioară a mulţimii N. Deoarece N
este o mulţime închisă, atunci 1t aparţine acestei mulţimi, adică
,11tt deci .*
1tt Însă, în acest caz, conform celor demonstrate
deja, funcţiile t şi t trebuie să coincidă pe un interval oarecare
,1
rtt şi punctul 1t nu poate fi marginea superioară exactă a
mulţimii N.
Astfel, am ajuns la contradicţie.
Deci, teorema este demonstrată.
Observăm, că fără restricţii suplimentare impuse funcţiei yxf ,
(de exemplu condiţia lui Lipshitz) nu se poate determina unicitatea
soluţiei obţinute.
Condiţia lui Lipshitz: Există un număr pozitiv N, astfel încât pentru
orice valoare x pentru care axx 0 şi orice
pereche de valori 'y şi ,"y ale variabilei y,
pentru care byy 0
' şi ,"0
byy este
satisfacută inegalitatea
."'",', yyNyxfyxf
Această inegalitate este întotdeauna satisfăcută dacă funcţia
yxf , are în fiacare punct al domeniului, derivată parţială ,,' yxfy
mărginită în întregul domeniu R, adică dacă .' Nfy
Exemplu. Ecuaţia 22 yx
dx
dy .
Valoarea iniţială 0,0 yx . Domeniul ,11 x 11 y . În
acest domeniu 2, yxf , adică N>2. Vom alege cel mai mic dintre

20
numerele 2
1;1 N
ba , adică
2
1h . Aproximaţiile succesive vor fi
convergente pentru 2
1x . Adică
00 y ,
xx
dxyxy0
32
0
2
13
,
xxx
dxyxy0
7
32
1
2
2633
,
595352079
2
6333969189
2
9
15117
0
3
0
1410622
2
2
3
xxxxdx
xxxxdxyxy
x x
Deci, pentru 2
1x , avem 04179.02 y şi în limitele a unei cifre, 3y
nu ne dă o precizie mai mare.
Teorema lui Peano asigură existenţa soluţiei numai pe segmentul
hxhx 00 ; , însă adeseori soluţia există şi pe un interval mai mare.
Soluţia )(1 xy , definită pe intervalul hxhxI 00 ;1
şi care
coincide cu )(x pe segmentul hxhx 00 ; , se numeşte prelungire
a soluţiei )(x . Soluţia )(xy , Ix , ce nu admite prelungire
diferită de ea însăşi, se numeşte soluţie neprelungibilă, iar graficul ei -
curbă integrală neprelungibilă.
Ca exemplu de soluţie neprelungibilă serveşte soluţia, care posedă
asimptotă verticală.
Dacă funcţia ),( yxf este continuă pe fâşia
yx , şi satisface inegalitatea
)()(),( xbyxayxf cu funcţiile )(xa şi )(xb continue, atunci
orice soluţie a ecuaţiei (1) poate fi prelungită pe întreg intervalul
x .
Punctul );(00
yx se numeşte punct de existenţă al ecuaţiei (1), dacă
există cel puţin o soluţie )(xy , ce satisface condiţia iniţială (2).
Punctul );( 00 yx se numeşte punct de unicitate al ecuaţiei(1), dacă orice
două soluţii ale problemei Coşi (1)-(2) coincid într-o vecinătate
];[ 00 hxhx . În caz contrar el este numit punct singular al ecuaţiei
(1).

21
Dacă mulţimea punctelor singulare conţine o curbă integrală, ultima este
numită curbă integrală singulară, iar soluţia respectivă - soluţie
singulară.
Vom spune, că egalitatea 0),,( cyxU este integrală generală a
ecuaţiei diferenţiale pe domeniul D, dacă pentru orice punct de unicitate
Dyx );( 00 există o constantă 0c , încât egalitatea 0),,( 0 cyxU
determină în mod implicit într-o vecinătate destul de mică a punctului
);( 00 yx o soluţie a problemei Cauchy (1)-(2).
Funcţia ),( cxy , care conţine o constantă arbitrară, se numeşte
soluţie generală a ecuaţiei diferenţiale (1) pe domeniul D, dacă pentru
orice punct de unicitate Dyx );( 00 există o astfel de valoare 0c a
constantei arbitrare, încât funcţia ),( 0cxy este o soluţie a
problemei Cauchy (1)-(2).
Exemplu. Cu ajutorul aproximaţiilor succesive să se găsească soluţia
problemei Cauchy:
1)0(, yyxy . (3)
Rezolvare.
Definim aproximaţiile succesive conform formulei recurente
x
nn ndttytxyxy0
10 ,...).2,1,0(,))((1)(,1)(
(4)
Din (4) obţinem
,2
1)(,1)(2
10
xxxyxy ,
!31)(
32
2
xxxxy
,....,!4
)!32
(21!4!3
1)(43243
2
3
xxxx
xxxxxy
)!1(
)!
...!32
(21)(132
n
x
n
xxxxxy
nn
n
Observăm că )(xyn poate fi reprezentată sub forma
n
k
nk
n xn
x
k
xxy
0
1
1)!1(!
2)(

22
De aceea, trecând la limită când n , căpătăm soluţia problemei
Cauchy (3):
121)!1(!
2)(lim)(0
1
xexn
x
k
xxyxy x
k
nk
nn
(Şirul funcţional )(xyn converge uniform pe orice segment finit
; ).
§ 4. Formarea ecuaţiilor diferenţiale
Formarea ecuaţiei diferenţiale a unei familii de curbe.
Fie dată ecuaţia unei familii de curbe
0),,( cyx (1)
unde reprezintă o funcţie continuă, ce posedă derivate parţiale în
raport cu c. Atunci putem forma ecuaţia diferenţială, pentru care familia
(1) reprezintă o familie de curbe integrale.
Considerăm variabila y funcţie de variabila x şi derivăm ambele părţi ale
ecuaţiei (1) în raport cu x:
0)),(,(
y
yxcxyx
Din sistemul
0
0),,(
yyx
cyx
eliminăm constanta c şi obţinem ecuaţia diferenţială respectivă.
Exemplu.
Să se formeze ecuaţia diferenţială a familiei de curbe cxyx 22
Rezolvare.
Derivăm ambele părţi ale ecuaţiei date în raport cu x şi alcătuim
sistemul
cyyx
cxyx
22
22
Eliminând constanta c, obţinem ecuaţia diferenţială de ordinul întâi
23
);( 00 yx
y
0
x
xyyxyx )22(22.
3. Probleme din geometrie, care conduc la ecuaţii diferenţiale.
Pentru rezolvarea problemelor din geometrie procedăm în felul
următor:
1. p
resupunem, că în sistemul cartezian de coordonate curba căutată
reprezintă graficul funcţiei )(xyy ;
2. p
entru a găsi mai uşor relaţiile dintre mărimile respective schiţăm
desenul corespunzător condiţiilor problemei;
3. g
ăsim relaţia dintre valoarea variabilei independente x, valoarea
funcţiei necunoscute )(xy şi a derivatei sale )(xy în punctul
x. Această relaţie şi este ecuaţia diferenţială, ce determină
curbele căutate.
Notă. În cazul coordonatelor polare );( , aplicăm formula:
cossin
cossin
d
d
d
d
dx
dy
, unde sin,cos yx
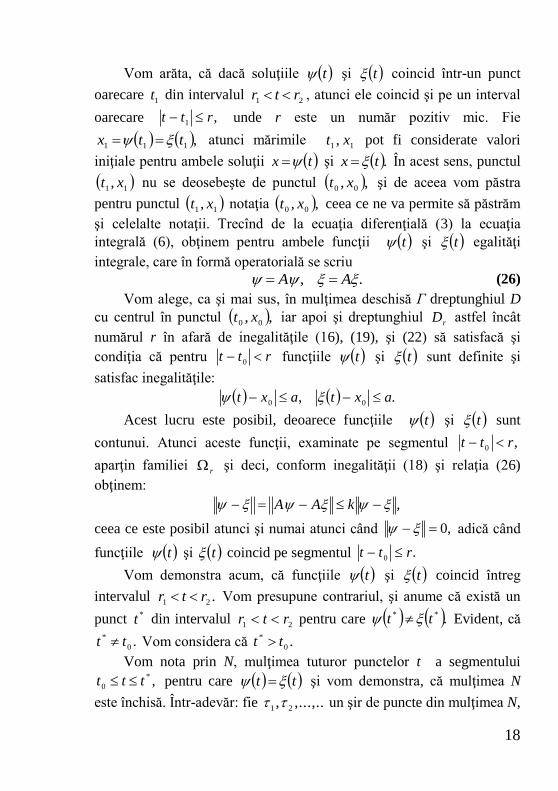
Exemplu. Să se
determine curbele
din plan, normalele
cărora în fiecare
punct trec prin
originea sistemului de coordonate .
Rezolvare. Fie );( 00 yx coordonatele unui punct de pe curba căutată
)(xyy .
Dacă 0)(' 0 xy , atunci coeficientul unghiular al tangentei în acest
punct este )(' 0xy , iar al normalei
)('
1
0xy. Rezultă, că ecuaţia
normalei este

24
)()('
10
0
0 xxxy
yy .
Deoarece normala trece prin origine, avem )(' 0
0
0xy
xy . Astfel,
pentru orice punct ))(,( xyx de pe curbă obţinem relaţia 0' xyy sau
y
xy ' . Integrala generală cyx 22
a ecuaţiei diferenţiale
obţinută determină familia de circumferinţe concentrice cu centrul în
origine.
§ 5. Ecuaţii diferenţiale cu variabile separabile
1. Ecuaţiile diferenţiale în formă normală de tipul:
ygxfdx
dy (1)
se numesc ecuaţii diferenţiale cu variabile separabile.
Aplicând criteriul respectiv, se poate constata uşor, că
cdxxf
yg
dy (2)
este integrarea generală a ecuaţiei (1) pe domeniul ei de definiţie, cu
excepţia punctelor, unde 0yg
În practică ecuaţiile diferenţiale de tipul (1) se rezolvă prin separarea
variabilelor
dxxf
yg
dy (3)
şi integrarea ambelor părţi ale egalităţii (3).
Notă. Menţionăm, că egalitatea 00 yg determină soluţiile
0yxy ale ecuaţiei diferenţiale (1), pierdute în procesul separării
variabilelor.
Exemplu. Să se integreze ecuaţia diferenţială
x
yky .
Des.2

25
Rezolvare. Vom considera ecuaţia pe intervalele 0x sau 0x şi o
vom scrie sub forma x
yk
dx
dy
Dacă 0y , împărţim ambele părţi la y şi înmulţim cu x , separând
astfel variabilele:
Rcxeycxkyx
dxk
y
dy
x
yk
dx
dy kc
11,lnln 1
Luăm în consideraţie că 0y , obţinem
kcxey 1 sau 0, 22 cxcy
k
La această mulţime adăugăm soluţiile 0y omise în procesul separării
variabilelor.
Observăm că mulţimea tuturor soluţiilor poate fi exprimată printr-o
singură formulă:
)0(,, xRcxcyk
.
2. Ecuaţiile diferenţiale de tipul
)(' byaxfy
se reduc uşor la ecuaţii cu variabilele separabile prin introducerea
unei funcţii noi
)()( xbyaxxz
Atunci '' byaz şi ecuaţia iniţială se reduce la ecuaţia
)(' zfbaz
care admite separarea variabilelor.
Găsim integrala generală a ultimei ecuaţii diferenţiale şi,
folosind (5), obţinem integrala generală a ecuaţiei iniţiale.
§ 6. Ecuaţii diferenţiale omogene şi ecuaţii reductibile la ele
Vom spune, că ecuaţia diferenţială yxfy , este omogenă, dacă
ea este invariantă la omotetii cu centru în origine: yxyx ;; ,
0 , adică, adică dacă funcţia f este omogenă de gradul zero de
omogenitate, ceea ce înseamnă, că yxfyxf ,, pentru orice
0 .
(4)
(5)

26
Efectuând substituţia x
yxz pentru 0x , obţinem o ecuaţie
diferenţială cu variabilele separabile zx, .
Exemplu. Să se integreze ecuaţia diferenţială
x
y
x
yy
2
.
Rezolvare. Observăm că
yxfx
y
x
yyxf ,,
2
,
adică ecuaţia dată este o ecuaţie diferenţială omogenă. Notăm x
yz ,
de unde xzy şi zxzy . În variabilele noi zx, ecuaţia
dată obţine forma unei ecuaţii cu variabilele separabile
zzxzzzzxz 222 .
integrala generală a căreia este
ycxz 22 , 0y
2. Orice ecuaţie diferenţială omogenă poate fi scrisă sub forma
x
ygy .
Ecuaţia
x
ygy poate fi redusă la o ecuaţie diferenţială
omogenă cu ajutorul substituţiei x , y , adică
translând originea sistemului de coordonate în punctul de intersecţie al
dreptelor 0x , 0 y . Aceiaşi procedură, aplicată la ecuaţia
diferenţială de forma
222
111
cybxa
cybxafy , 02
2
2
1 cc ,
ne conduce la ecuaţia omogenă
ybxa
ybxafy
22
11. (1)
Acest lucru se efectuează în felul următor:

27
a) Dacă dreptele 0111 cybxa şi
0222 cybxa se intersectează într-un singur
punct ; , iar pentru aceasta este necesar şi
suficient să nu se anuleze determinantul
22
11
ba
ba ,
atunci efectuăm translaţia x , y . În
rezultat căpătăm o ecuaţie de tipul (1).
b) Dacă 0 , atunci ybxakybxa 2211
pentru un oarecare k şi substituţia
ybxaz 22 reduce ecuaţia iniţială la o ecuaţie cu
variabile separabile zx,
Exemplu. Să se integreze ecuaţia diferenţială:
2
2
1
22
yx
yy .
Rezolvare. Considerăm sistemul
,01
,02
yx
y
de unde găsim coordonatele punctului de intersecţie al
dreptelor respective: 2,3 . În variabile noi
);( , legate cu cele vechi prin intermediul formulelor
2,3 yx , avem
2
2
2
2
)(
2
)123(
2
d
d
dx
dy
Ecuaţia obţinută 2
2
)(
2
d
deste o ecuaţie diferenţială
omogenă, care, la rândul său, cu ajutorul substituţiei
)()( u se reduce la o ecuaţie cu variabilele separabile.
Ecuaţia obţinută

28
0
2
2
)1(
)1(
u
uu
d
du
are următoarea integrală generală
)2exp( arctgucu
care în variabilele iniţiale ),( yx capătă forma:
)3
22exp(2
x
yarctgcy .
Exemplu.
Să se integreze ecuaţia diferenţială
263
12'
yx
xyy
Rezolvare.
Observăm că şi . Substituim
yxz 2 , de unde obţinem
23
5
z
z
dx
dz
Ecuaţia obţinută are soluţiile
cxzz
z
5ln23
0
Revenind la variabilele iniţiale, căpătăm integrala generală
)3exp(2 yxcyx .
3. Ecuaţii diferenţiale cuaziomogene.
Ecuaţia diferenţială, invariantă la omotetii generalizate
);();( yxyx m pentru un oarecare număr real m şi orice
0 , se numeşte ecuaţie diferenţială omogenă generalizată, ori,
cu alte cuvinte, cuaziomogenă.
Aceste ecuaţii pot fi reduse la ecuaţii cu variabilele separabile prin
intermediul substituţiei mxzy . Menţionăm că pentru m
iraţional, ori m-p/q, unde q este par, substituţia de mai sus este
valabilă doar în semiplanul 0x , iar în semiplanul 0x rămâne
să aplicăm substituţia mxzy )( .
)2(363 xyyx

29
Exemplu.
Să se integreze ecuaţia diferenţială
2
2 2
xy
dx
dy
Rezolvare.
Verificăm dacă ecuaţia dată este cuaziomogenă. Pentru aceasta căutăm
un astfel de număr real m, pentru care substituţia );();( yxyx m nu
schimbă ecuaţia.
Deoarece dxxd )( şi dyyd mm )( , avem
22
22 2
yy
dx
dy mm
Această ecuaţie nu va depinde de , dacă şi numai dacă m-
1=2m=-2, de unde m=-1.
efectuând substituţia 1 xzy , reducem ecuaţia iniţială la
ecuaţia cu variabile separabile:
x
zz
dx
dz 22
soluţia generală este
3
32
xc
xcz
Astfel soluţia generală a ecuaţiei iniţiale este
4
32
xcx
xcy
.
§ 7. Ecuaţii liniare şi reductibile la ele.
1. Ecuaţii diferenţiale liniare. Ecuaţia diferenţială
normală de forma
)()(' xbyxay se numeşte ecuaţie diferenţială liniară.
Dacă termenul liber 0)( xb ecuaţia se numeşte ecuaţie diferenţială
omogenă, în caz contrar – ecuaţie liniară neomogenă.
Soluţia generală a ecuaţiei diferenţiale neomogene are forma:
)()( xxcy

30
unde )(xc este soluţia generală a ecuaţiei liniare omogene asociate,
iar
)(x este o soluţie particulară a ecuaţiei neomogene.
Ecuaţia diferenţială liniară se rezolvă în două etape (metoda „variaţiei
constantei”):
1. rezolvăm ecuaţia diferenţială liniară omogenă asociată
yxay )(' , soluţia generală a căreia va fi:
))(exp()( dxxacxy (2)
2. Căutăm soluţia particulară a ecuaţiei liniare noemogene sub
forma:
))(exp()( dxxaxcy (3)
unde )(xc este o nouă funcţie necunoscută (variem constanta).
Înlocuind (3) în egalitatea (1) căpătăm o ecuaţie diferenţială
cu variabilele
separabile pentru funcţia c(x), care se rezolvă uşor.
Exemplu
Să se integreze ecuaţia diferenţială
xxyy '
Rezolvare.
Rezolvăm ecuaţia liniară omogenă asociată
)2
exp('2x
cyxyy
„Variem constanta”, adică căutăm soluţia particulară a ecuaţiei
diferenţiale neomogene sub forma
)2
exp()()(2x
xcxy
Derivând şi înlocuind în ecuaţia iniţială, obţinem
cx
xcxx
xc 2
exp)()2
exp()('22
Deci o soluţie particulară a ecuaţiei neomogene este 1y ,
iar soluţia
generală a ei este

31
Rcx
cy ),2
exp(12
Notă. Soluţia generală a ecuaţiei diferenţiale (1) poate fi
exprimată prin
formula
]))(exp()([))(exp( dxdxxaxbcdxxay
(4).
Notă. 1) Soluţiile problemelor Coşi pentru ecuaţiile
diferenţiale liniare
omogene sau neomogene pot fi scrise sub forma
))(exp()()(
)('
9
0
00
x
x
dttayxyyxy
yxay
(5)
şi respectiv
]))(exp()([))(exp()(
)(),()('
0 00
0
00
x
x
t
x
x
x
dtdssatbydttaxy
yxyxbyxay
(6)
2) Unele ecuaţii diferenţiale capătă forma ecuaţiei liniare,
dacă în relaţia
căutată dintre x şi y, vom considera y- variabila independentă , iar x(y) –
funcţie necunoscută. Deci, de la variabilele (x,y(x)) trecem la variabilele
(x(y),y).
2. Ecuaţia lui Bernoulli. Ecuaţia diferenţială de forma
)1,0,(,)()(' Ryxbyxay
(7)
se numeşte ecuaţia lui Bernoulli.
Ea se reduce la o ecuaţie liniară prin împărţirea ambelor părţi ale
ecuaţiei la y
)()('1
xby
xa
y
y
şi substituţia

32
)(
1)(
1 xyxz
Observăm că derivata )(
)(')1()('
xy
xyxz
este aproape egală cu
termenul din partea stângă a ecuaţiei de mai sus, fapt ce înlesneşte
efectuarea substituţiei.
Exemplu. Să se rezolve ecuaţia diferenţială
x
yyy 22' 2
Rezolvare. Avem o ecuaţie Bernoulli. Împărţim la 2y ambele părţi ale
ecuaţiei, dar nu înainte de a verifica, că condiţia 02 y ne determină o
soluţie a ecuaţiei, şi anume: 0y ,
xyy
y 22
'2
Substituim y
z1
, şi deci, 2
''
y
yz , ne conduce la ecuaţia liniară
22' x
zz
care are soluţia generală
)(,22 Rcxcxz .
2. Ecuaţia lui Riccati. Acest nume îl poartă
ecuaţia diferenţială de forma
)()()(' 2 xcyxbyxay
pentru 0)x(c,0)x(a
În caz general ecuaţia Ricati nu poate fi integrată în cuadraturi, adică nu
admite o prezentare a soluţiei generale cu ajutorul unui număr finit de
integrale nedefinite de la funcţii elementare.
Ştiind, însă, o soluţie particulară )x(y0
a ecuaţiei Ricati, o putem
reduce pe aceasta la o ecuaţie Bernuli prin substituţia
).x(y)x(y)x(z0
§ 8. Ecuaţii cu diferenţiala totală. Factor integrant
33
1. Vom spune, că ecuaţia
0),(),( dyyxNdxyxM
este o ecuaţie cu diferenţială totală, dacă partea stângă a ei reprezintă
diferenţiala totală a unei funcţii de două variabile ),( yxU , cu alte
cuvinte, dacă există o astfel de funcţie diferenţiabilă ),( yxU , încât
0),(),( dyyxNdxyxMdU
Pe de altă parte
dyy
Udx
x
UdU
şi de aceea
y
UyxN
x
UyxM
),(,),(
Dacă funcţiile 1, CNM , atunci derivatele parţiale mixte de ordinul
doi ale funcţiei ),( yxU coincid. Astfel obţinem condiţia lui Eiler,
necesară pentru ca (1) să fie o ecuaţie în diferenţiale totală:
x
N
y
M
.
Dacă domeniul de definiţie al ecuaţiei este un domeniu monoconex
(domeniu, care împreună cu orice curbă închisă fără autointersecţii
conţine şi mulţimea din interiorul acestei curbe), atunci condiţia (2) este
şi suficientă pentru ca ecuaţia (1) să fie o ecuaţie cu diferenţială totală.
Aşadar, dacă (1) este o ecuaţie cu diferenţială totală, atunci există o
astfel e funcţie ),( yxU , încât
),(
),(
yxNy
U
yxMx
U
A afla integrala ecuaţiei (1) înseamnă a restabili funcţia ),( yxU după
derivatele ei parţiale (3).
În caz general, într-un domeniu monoconex D funcţia ),( yxU poate fi
exprimată prin integrala curbilinie de speţa a doua:
(1)
(3)
34
L
NdyMdxyxU ),(
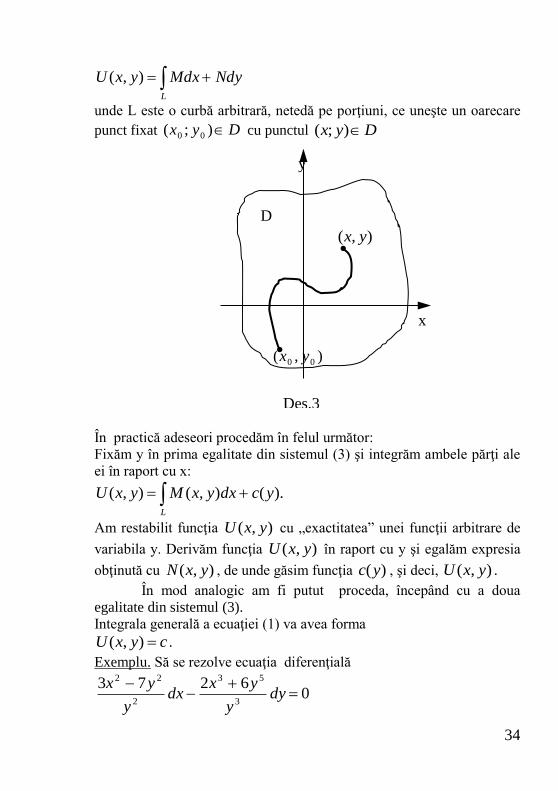
unde L este o curbă arbitrară, netedă pe porţiuni, ce uneşte un oarecare
punct fixat Dyx );( 00 cu punctul Dyx );(
În practică adeseori procedăm în felul următor:
Fixăm y în prima egalitate din sistemul (3) şi integrăm ambele părţi ale
ei în raport cu x:
L
ycdxyxMyxU ).(),(),(
Am restabilit funcţia ),( yxU cu „exactitatea” unei funcţii arbitrare de
variabila y. Derivăm funcţia ),( yxU în raport cu y şi egalăm expresia
obţinută cu ),( yxN , de unde găsim funcţia )(yc , şi deci, ),( yxU .
În mod analogic am fi putut proceda, începând cu a doua
egalitate din sistemul (3).
Integrala generală a ecuaţiei (1) va avea forma
cyxU ),( .
Exemplu. Să se rezolve ecuaţia diferenţială
06273
3
53
2
22
dyy
yxdx
y
yx
(4)
y
x
D
),( 00 yx
),( yx
Des.3

35
Rezolvare. Observăm, că domeniul de definiţie al ecuaţiei este
reuniunea a două semiplane: 0y şi 0y , şi deci, e monoconex (dar
nu conex).
Verificăm condiţia lui Euler (2):
x
y
yx
y
x
y
y
yx
3
53
3
22
22 62
6
73
.
Aceasta înseamnă, că există o astfel de funcţie ),( yxU , încât
.62
)('2
)(7
)(73
),(62
73
3
53
3
3
2
23
2
22
3
53
2
22
y
yxyc
y
x
y
Uyc
y
xyx
ycy
yxyxU
y
yx
y
U
y
yx
x
U
Din ultima egalitate căpătăm 26)(' yyc , de unde
1
32)( cyyc
Deci, funcţia ),( yxU , despre care este vorba în definiţia ecuaţiei cu
diferenţiala totală, are forma
2
2
23
67
),( yy
xyxyxU
(pentru simplitate considerăm 01 c ).
Liniile ei de nivel cyxU ),( conţin curbele integrale ale ecuaţiei date.
Deci, integrala generală a ecuaţiei iniţiale are forma:
.67 2
2
23
cyy
xyx
2. Factor integrant Dacă ecuaţia diferenţială (1) nu este o ecuaţie cu
diferenţială totală, atunci, în unele cazuri, ea poate fi adusă la o astfel de
formă, înmulţind ambele părţi ale ecuaţiei cu o funcţie )y,x( ,
numită factor integrant.

36
Aplicînd condiţia lui Eiler pentru ecuaţia nouă
0dy)y,x(N)y,x(dx)y,x(M)y,x(
obţinem următoarea ecuaţie diferenţială cu derivate parţiale:
x
N
y
M
yM
xN
În cîteva cazuri particulare factorul integrant poate fi determinat mai
uşor şi anume, dacă se ştie că:
a) ecuaţia (1) admite factor integrant , ce depinde numai de x. Pentru
aceasta este necesar şi suficient ca să depindă numai de x expresia
).x(dx
)(lnd)x(
N
x
N
y
M
(5)
Din ultima ecuaţie găsim .
b) ecuaţia (1) admite factor integrant , ce depinde numai de y. În mod
analogic, pentru aceasta este necesar şi suficient ca să depindă numai de
y expresia ).x(dy
)(lnd)x(
M
x
N
y
M
(6)
c) ecuaţia (1) admite factor integrant de forma )( , unde
)y,x( este o funcţie de două variabile date. Aceasta va avea loc
atunci şi numai atunci, când
)()(ln
)(
d
d
yM
xN
x
N
y
M
(7)
Notă. Formula (8) cuprinde formulele (5) şi (6) pentru x)y,x(
şi, respectiv, y)y,x( .
(8)

37
Exemplu. Să se rezolve ecuaţia diferenţială
0)()1( 22 dyxyxdxyx
(9)
Rezolvare. Ne putem convinge uşor că ecuaţia dată nu este o ecuaţie cu
diferenţiala totală, deoarece ea nu satisface condiţia lui Eiler (2).
Verificăm dacă există factor integrant, ce ar depinde numai de o singură
variabilă. Pentru aceasta calculăm:
)(232 22 yxxxxyxx
N
y
M
şi observăm că, împărţind la ),( yxN , căpătăm o expresie ce depinde
doar de x:
xxyx
yxx
N
x
N
y
M
2
)(
)(22
Aplicînd (5) obţinem
2
12)(ln
xxdx
d
Dacă înmulţim ambele părţi ale ecuaţiei (9) cu 1/x2 obţinem ecuaţia cu
diferenţiala totală
0)()1
(2
dyxydxyx
Integrala generală a căreia are forma
.2
12
cy
xyx
rămâne să alăturăm curba integrală 0x .
Exemplu. Să se rezolve ecuaţia diferenţială
022 dydxxyx , (10)

38
dacă, se ştie, că ea posedă factor integrant de forma , unde
yx 2 .
Rezolvare. Înlocuind în (7.) yx 2 , obţinem
2
1
2
12
yx
yM
xN
x
N
y
M
,
Deci,
dd2
1ln .
De aici ln2
1ln sau 2
122
1 yx .
Înmulţind ambele părţi ale ecuaţiei (10.) cu factorul integrant ,
căpătăm o ecuaţie cu diferenţială totală.
Rezolvând-o, găsim integrala generală a ecuaţiei (10.):
.
,2
2
2
xy
cyxx
9. Ecuaţii nerezolvate în raport cu derivata. Soluţii singulare
1. Ecuaţiile diferenţiale nerezolvate în raport cu
derivata
0)',,( yyxF
uneori pot fi reduse la cîteva ecuaţii de forma normală, şi anume, dacă
funcţia F admite descompunerea
)].,('[...)],('[)',,(1
yxfyyxfyyyxFk
Rezolvînd fiecare ecuaţie în formă normală
),...,1();,(' kiyxfyi
şi reunind soluţiile lor, obţinem soluţiile
ecuaţiei diferenţiale (1).
Exemplu. Ecuaţia 1)( 2 y posedă două familii de soluţii:
cxy , cxy şi prin fiecare punct al planului trec două
curbe integrale. Aceasta se datoreşte faptului că, dacă este dată valoarea
iniţială 00
)( yxy , atunci valoarea derivatei )('0
xy o putem găsi
39
din egalitatea 0))('),(,(000
xyxyxF , iar ultima, la rîndul său,
determină una sau mai multe valori )('0
xy .
Din această cauză problema Coşi pentru ecuaţii diferenţiale de ordinul
întîi implicită se defineşte cu ajutorul sistemului
00
00
)('
)(
0)',,(
pxy
yxy
yyxF
format din ecuaţia diferenţială (2) şi din ecuaţiile iniţiale (3)- (4), unde
0,0,0 pyx satisfac egalitatea 0)( 0,0,0 pyxF
Teorema 1. Dacă funcţia ),,( pyxF este continuă împreună cu
derivatele sale parţiale pe un domeniu 3RD şi pentru
Dpyx );;( 0,0,0 avem 0)( 0,0,0 pyxF şi
0)( 0,0,0 pyxdp
dF (5)
atunci pe un interval oarecare există o singură soluţie a problemei Coşi
(2)-(4).
Notă. Teorema de existenţă şi unicitate 1 uneşte în sine două teoreme de
existenţă: prima – teorema de existenţă a funcţiei implicite ),( yxfp
cu funcţia diferenţiabilă, fapt garantat de condiţia (5); a doua – teorema
Coşi de existenţă şi unicitate a soluţiei ecuaţiei diferenţiale (explicite)
),(' yxfy cu condiţia iniţială 00 )( yxy .
În cele ce urmează vom presupune, că funcţia F din ecuaţia (1) este
continuă împreună cu derivatele sale parţiale.
Mulţimea punctelor );;( 0,0,0 pyx , în care nu este respectată condiţia
(5) a teoremei Coşi, adică mulţimea valorilor iniţiale );;( 0,0,0 pyx ,
pentru care nu sunt garantate existenţa sau unicitatea soluţiei problemei
Coşi (2)-(4), este definită de ecuaţiile
0),,(
0),,(
pyxdp
dF
pyxF
(6)
2
3
4
40
Examinând p din sistemul (6) obţinem o ecuaţie 0),( yx ce
defineşte o curbă în planul XOY, numită curbă discriminantă. Ramurile
ei pot fi şi curbe integrale ale ecuaţiei (1).
Prin analogie cu § 2 vom spune, că punctul );;(0,0,0
pyx este un punct
de existenţă al ecuaţiei diferenţiale implicite (1). Dacă problema Coşi
(2)-(4) posedă cel puţin o soluţie. Punctul de existenţă );;( 0,0,0 pyx
este numit punct de unicitate al ecuaţiei (1), dacă orice două soluţii ale
problemei Coşi (2)-(4) coincid într-o vecinătate [;] 00 xx . În caz
contrar acest punct este numit punct singular al ecuaţiei (1), adică în
cazul, când există cel puţin două soluţii ale problemei Coşi (2)-(4), ce
diferă în orice vecinătate a punctului 0x , pe care ambele sunt definite.
Soluţia Ixxy ),( a ecuaţiei diferenţiale implicite (1) este numită
soluţie singulară a ecuaţiei (1), dacă pentru orice Ix 0 punctul
))(');(;( 000 xxx este un punct singular al acestei ecuaţii.
Din teorema (1) rezultă, că toate punctele singulare se proiectează pe
curba discriminantă şi că la rolul de soluţie singulară pot pretinde doar
ramurile acestei curbe.
Soluţiile singulare au o mare importanţă la studierea ecuaţiilor
diferenţiale implicite, determinând în cea mai mare măsură tabloul
calitativ al curbelor integrale.
Exemplu. Să se rezolve ecuaţia diferenţială yy 2)'( şi să se
evidenţieze soluţiile singulare; să se construiască curbele integrale.
Rezolvare.
Considerăm sistemul (6), ce determină curba discriminantă a acestei
ecuaţii:
02),,(
0),,( 2
ppyxp
F
yppyxF
Eliminând variabila p, obţinem curba discriminantă 0y . Rezolvăm
ecuaţia iniţială:
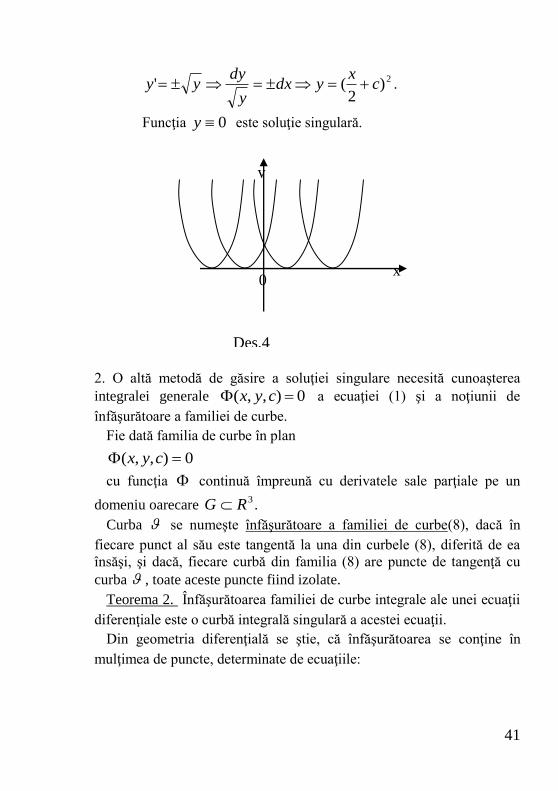
41
2)
2(' cx
ydxy
dyyy .
Funcţia 0y este soluţie singulară.
2. O altă metodă de găsire a soluţiei singulare necesită cunoaşterea
integralei generale 0),,( cyx a ecuaţiei (1) şi a noţiunii de
înfăşurătoare a familiei de curbe.
Fie dată familia de curbe în plan
0),,( cyx
cu funcţia continuă împreună cu derivatele sale parţiale pe un
domeniu oarecare 3RG .
Curba se numeşte înfăşurătoare a familiei de curbe(8), dacă în
fiecare punct al său este tangentă la una din curbele (8), diferită de ea
însăşi, şi dacă, fiecare curbă din familia (8) are puncte de tangenţă cu
curba , toate aceste puncte fiind izolate.
Teorema 2. Înfăşurătoarea familiei de curbe integrale ale unei ecuaţii
diferenţiale este o curbă integrală singulară a acestei ecuaţii.
Din geometria diferenţială se ştie, că înfăşurătoarea se conţine în
mulţimea de puncte, determinate de ecuaţiile:
0
y
x
Des.4
42
0),,(
0),,(
pyxdp
dF
pyxF
(9)
Deci, pentru a găsi ecuaţia înfăşurătoarei, trebuie să excludem
parametrul c din (9). Curba obţinută 0),( yxg conţine înfăşurătoarea
(însă poate să nu coincidă cu ea).
§ 10. Metoda introducerii parametrului.
Ecuaţia lui Lagrange.
Ecuaţia lui Clairaut.
1.Ecuaţiile diferenţiale nerezolvate în raport cu derivata de tipul:
y = (x,y’) (1)
sau
x’ = g(y,y’) (2)
se rezolvă prin metoda introducerii parametrului.
Această metodă constă în următoarele:
Notăm y’= p , unde p este un parametru. Mai jos vom considera
ecuaţia diferenţială (1) (ecuaţia (2)se studiază în mod analogic ).
Introducerea parametrului p readuce ecuaţia (1) la forma
y = f (x,p) (3)
Calculând diferenţialele totale ale ambelor părţi ale ecuaţiei (3), obţinem
.dpp
fdx
x
fdy
(4)
Pe de altă parte, p = y’ = dx
dy , de unde
dy = p· dx. (5)
Din (4) şi (5) avem relaţia:
p dx = ,dpp
fdx
x
f
(6)
care este o ecuaţie diferenţială de formă simetrică cu variabilele x şi p.
Dacă integrala generală a ecuaţiei (6) are forma p = α (x,c),
atunci, în virtutea egalităţii (3) y = (x,α(x,c)) va fi soluţia generală a
ecuaţiei (1). Dacă, însă, ecuaţia (6) admite integrala generală de forma x

43
= ψ (p,c), atunci mulţimea soluţiilor ecuaţiei (1) este determinată cu
ajutorul următoarei parametrizări:
).),,(f( y
c),(p, ø x
pcp (7)
Remarcă. Accentuăm, că în formula (7) p este un parametru !
Integrarea ecuaţiilor diferenţiale implicite se simplifică mult în cazurile
particulare
y = f(y’)
şi, respectiv,
x = g(y’).
Exemplu. Să se rezolve ecuaţia diferenţială:
y'. cosy'- x
Rezolvare Introducem parametrul p = dx
dy şi atunci x = cosp – p.
Trecem la diferenţiale totale în partea stângă şi cea dreaptă a ecuaţiei:
dx = - sinp · dp –dp
Înlocuind dx = p
dy, obţinem ecuaţia iniţială în forma parametrică
.sincos
cos
cpppy
ppx
Exemplu. Să se integreze ecuaţia diferenţială:
(y’)2 + y2 = 1.
Să se găsească trei soluţii distincte, definite pe întreaga axă numerică,
care satisfac condiţia y(0)= 1. Cîţi termeni în punctul x = 0 ( vezi
problema 2.8 şi nota ce o urmează ) formează soluţiile ecuaţiei, ce
satisfac această condiţie iniţială ?
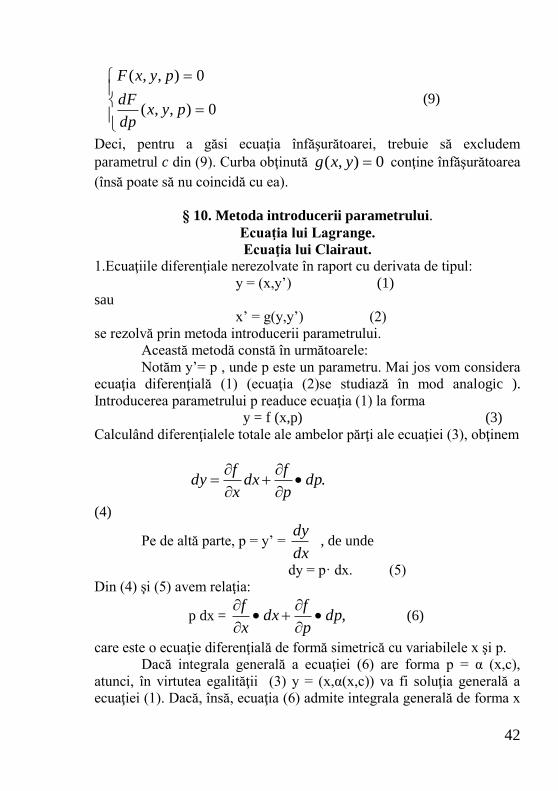
Rezolvare Aplicăm metoda parametrizării, notând
p. cos y Din egalităţile p·dx sin dy şi
p·dp-sin dy primim 0 dp) ·(dx p·sin . De aici
c.-xp -dx,dysau 0 psin Aşa dar, funcţiile definite
parametric cu ajutorul ecuaţiilor
44
py
p
cos
,0sin şi
py
pcx
cos
reprezintă soluţia ecuaţiei iniţiale. Eliminînd parametrul p, obţinem y = -
1, y = 1 şi y = cos(x – c).
Dreptele 1y servesc
drept înfăşurători ale familiei
de curbe.
2. Ecuaţia lui Lagrange . Dacă în ecuaţia
0)',,( yyxF funcţia F este liniară faţă de x şi z,
atunci această ecuaţie poate fi redusă la forma
)'()'( yyxy
În acest caz ea poartă denumirea de ecuaţia lui Lagrange.
Introducem parametrul py ' şi calculăm diferenţiala totală
a funcţiei
)()( xy
Deoarece dxdy , obţinem
dxdxdx )](')('[)(
sau
dxdx )](')('[)]([
(13)
Fie 0d . Atunci c . Ecuaţia (13) admite soluţiile i
,
unde i
sunt rădăcinile ecuaţiei
0)(
(14)
Des.5
45
În acest caz funcţiile
)()(ii
xy
(15)
sunt soluţii ale ecuaţiei lui Lagrange (11).
Fie 0d . Împărţim ambele părţi ale ecuaţiei (13) la d şi obţinem
o ecuaţie liniară neomogenă
)(')(')]([
xd
dx
Fie ),( cpxx soluţia ei generală. În virtutea relaţiei (12), obţinem
reprezentarea parametrică a soluţiilor ecuaţiei diferenţiale (11):
)(')(),(
),(
ppcpxy
cpxx
care împreună cu soluţiile (15) formează mulţimea tuturor soluţiilor
acestei ecuaţii.
Exemplu. Să se integreze ecuaţia diferenţială 2)'('2 yxyy (16)
Rezolvare. Notăm py ' şi obţinem
2)(2 pxpy (17)
Trecînd la diferenţialele totale în ambele părţi, avem
pxdp
dxp 22
Soluţia generală a acestei ecuaţii liniare este
.3
22
pp
cx (18)
Înlocuind x în egalitatea (17) obţinem
.2
3
3
p
ppy (19)
Ultimile două egalităţi reprezintă integrala generală în formă
parametrică a ecuaţiei iniţiale.
3. Ecuaţia lui Clero reprezintă un caz particular al ecuaţiei lui Lagranj
şi are forma

46
yyxy . (20.)
această ecuaţie se rezolvă prin aceiaşi metodă ca şi ecuaţia lui Lagrange.
Ca rezultat căpătăm soluţia ei în forma:
ccxy . (21.)
Curbele integrale reprezintă o familie de drepte. Înfăşurătoarea lor este o
curbă integrală singulară, care admite parametrizarea ( în cazul, când
c există, este continuă şi 0c ):
cccy
cx
, ( c - parametru.) (22.)
Formulele (21.)-(22.) descriu toate soluţiile ecuaţiei iniţiale.
Exemplu. Să se integreze ecuaţia diferenţială
2
1
yyxy
.
Rezolvare soluţia generală a acestei ecuaţii Clero este 2
1
ccxy .
Soluţia singulară se determină prin eliminarea constantei c din
următoarele ecuaţii:
.032
,01
,032
,01,, 32
2
32
cxy
xcyc
xccyc
xcyccyx
Deci, 0427 32 yx .
47
Noţiuni generale despre ecuaţie direferenţiale de ordin superior.
Micşorarea ordinului ecuaţiei diferenţiale.
1. Noţiuni generale.
Ecuaţia
0),...,,,,( ||| nyyyyxF
(1)
Unde X este variabilă independenta, )(xy - funcţie necunoscută, iar
funcţia F este definită pe domeniul 2 nRG , se numeşte ecuaţie
direferenţială de ordinul n .
Ecuaţia
),...,,,,( )1(|||)( nn yyyyxfF
(2)
Unde funcţia f este definita pe domeniul 2 nRD , se numeşte
ecuaţie direferenţială de ordinul n de forma normală.
Funcţia )(xy se numeşte soluţie a ecuaţiei direferenţiale (1)
pe intervalul )(I dacă este definit pe acest interval împreuna cu
toate derivatele sale pînă la ordinul n si pentru orice Ix au loc
Gx n
xxx ),...,,,( )(
)(
|
)()( şi 0),...,,( )(
)()( n
xxx .
Problema lui Cosi pentru ecuaţia diferenţială de formă normală (2)
ce formulează in felul următor: sa se afle soluţia y(x) a ecuaţiei
diferenţiale (2) , care satisface condiţiile iniţiale:
00 )( yxy ,10
| )( yxy , . . . , 1
)1( )(
n
n yxy
(3)
Pentru numerele date 1100 ,...,,, nyyyx numite valori iniţiale ale
soluţiei y(x).
Punctul Dyyyx n 1100 ,. . . ,,, se numeşte punct de existentă a
ecuaţiei diferenţiale (2) , dacă există cel puţin o soluţie
Ixxy ),( , care satisface condiţiile iniţiale (3). Acest punct se
numeşte punct de unicitate al ecuaţiei diferenţiale (2), daca orice doua
soluţii ale problemei lui Coşi (2)-(3) coincid într-o vecinătate a
punctului , în caz contrar el este numit punct singular al ecuaţiei (2).

48
Funcţia Ixxy ),( se numeşte soluţie singulară a ecuaţiei
diferenţiale (2), dac pentru orice Ix punctul
))(),...,(),(,( 0
1
0
|
00 xxxx n este un punct singular al ecuaţiei (2).
Vom spune că funcţia
),...,,,(),...,,,(: 2121 nn zzzxfzzzxf satisface condiţia lui Lipsit in
raport cu variabilele nzzz ,...,, 21 pe domeniul 2 nRG dacă există
un număr L>0 astfel în cît pentru orice două puncte ( nzzzx ,...,,, 21 ) ,
Gwwwx n ),...,,,( 21 are
|)|...|(||),...,,,(|),...,,,( 112121 nnnn wzwzLwwwxzzzxf
Teorema Coşi-Picare ( teorema de existentă si unicitate ) ,dacă funcţia
f este definită, continuă şi satisface condiţia lui Lipsit în raport cu
variabilele ),...,,,,( )1(||| nyyyyx pe o vecinătate a punctului
Dyyyx n 1100 ,...,,, , atunci acest punct va fi un punct de unicitate al
ecuaţiei diferenţiale (2).
Funcţia , ),...,,,( 21 ncccxy unde nccc ,...,, 21 sunt constante
arbitrare , se numeşte soluţie generală a ecuaţiei diferenţiale (2) pe
domeniul D, dacă pentru orice punct de unicitate
Dyyyx n 1100 ,...,,, exista n valori 00
2
0
1 ,...,, nccc ale constantelor
arbitrare astfel, în cît funcţia ),...,,,( 00
2
0
1 ncccxy este soluţie a
problemei Cosi (2)-(3).
Funcţia de (n+1) variabile ),...,,...,,( 121 nn xxxx se numeşte
integrala prima a ecuaţiei diferenţiala (1). Dacă pentru orice soluţie
y= (x), Ix există o constantă C astfel în cît
Cxxxx n ))(),...,(),(,( 1
0
|
01 pentru orice Ix .
Ordinul ecuaţiei (1) poate fi redus cu o unitate , dacă cunoaştem o
integrală primă a ei, şi cu două unităţi, dacă cunoaştem două integrale
prime funcţional independente şi ale ei . pentru aceasta scriem
relaţiile:
1
2|
1 ),...,,,( Cyyyx n

49
Şi respectiv
2
1|
2 ),...,,,( Cyyyx n
Iar din ultimul sistem eliminăm 1ny , căpătăm
0),,,...,,,( 21
2| CCyyyx n
(4)
Vom spune că expresia (4) determină o integrală intermediară a ecuaţiei
intermediare (1).
Prin analogie ştiind k, (k<n) integrale prime funcţional
independente, putem micşora ordinul ecuaţiei cu k unităţi.
Dacă sunt cunoscute n integrale prime funcţional independente,
atunci eliminînd din ele )1(||| ,...,, nyyy vom căpăta
0),...,,,,( 21 ncccyx
(5)
Egalitatea (5) se numeşte integrală generală a ecuaţiei diferenţiala (1) pe
domeniul 2 nRD dacă pentru orice punct de unicitate
există n constante 00
2
0
1 ,...,, nccc astfel în cît
egalitatea
0),...,,,,( 00
2
0
1 ncccyx
Determină în mod implicit soluţia problemei lui Coşi (2)-(3) într-o
vecinătate a punctului .
2.) Cazuri particulare de micşorare a ordinului ecuaţiei diferenţiale.
A) Ecuaţia nu conţine in mod explicit funcţia necunoscută şi derivatele
ei pînă la ordinul k .
Fie dată ecuaţia
0),...,,,( )1()( nkx yyyxF
(6)
Substituţia )()( )( xyxz k reduce ecuaţia (6) la o ecuaţie de ordinul (n-
k).
0),...,,,( )(| knzzzxF
(7)
Fie ),...,,,,( 21 kncccyxz soluţia generală a ecuaţiei (7) . atunci în
virtutea substituţiei
),...,,,,( 21
)(
kn
k cccyxy

50
Şi dacă integrăm de k ori ambele părţi ale ultimei egalităţi, atunci
obţinem soluţia generală a ecuaţiei iniţiale.
B) Ecuaţia nu conţine in mod explicit variabila independentă x
0),...,,,,( )(||| nyyyyxF
(8)
În cazul acesta considerăm în calitate de variabilă independentă y , iar
în calitate de funcţie necunoscută |)( yyz derivăm ambele părţi ale
identităţii )())(( | xyxyz şi găsim
zdy
dz
dx
dy
dy
dzxyz
dx
d
dx
ydy **
2
2||
2
2
2||||| ****)(
dy
dzz
dy
zd
dx
dyx
dy
dz
dy
dxyz
dx
xydz
dx
dy
dx
dy
Deoarece derivata de ordinul k a funcţiei
k
k
dx
ydxy )( se exprimă
prin derivate de ordin mai mic ale funcţiei z(y) , atunci in variabilele noi
(y,z) căpătăm o ecuaţie de ordinul n-1 .
Remarcă . Dacă considerăm y variabilă independentă, neglijăm
soluţiile y=const., de aceea vom anexa la răspuns soluţiile constante
iby , unde sunt rădăcinile ecuaţiei algebrice
0)0,...,0,0,( yF
Exemplul 1.1
Să se integreze ecuaţia diferenţiala 2||2||2 )13()1( yyyyy
Rezolvare:
Notăm zy | dacă considerăm y variabilă independentă , atunci
obţinem
222 )13()1( zydy
dzyy
Separăm variabilele
dyyy
y
z
dz
)1(
132
2

51
Prin integrare căpătăm
cy
zy
22 )1(
Revenim la variabilele iniţiale si obţinem integrala intermediara
122
||
)1(c
y
yy
De unde
2122
1
1cxc
y
În procesul împărţirii la z am neglijat soluţiile de forma y=const .
Înlocuim în ecuaţia iniţiala y=b şi obţinem
( 0*)13(0**)1( 22 bbb
Adică y=c reprezintă o familie de soluţii, pierdute în procesul separării
variabilelor. Astfel, ecuaţia iniţială are soluţiile:
2122
1
1cxc
y
y=c
c). Funcţia F este o funcţie omogenă în raport cu variabilele nyyy ,...,, |, adică are loc relaţia
),...,,,(*),...,,,( || nmn yyyxFyyyxF
În acest caz introducem o nouă funcţie necunoscută 0,|
yy
yz .
Deoarece ),...,3(),(, |||3||||2||| zzzzyyzzyyyxy în
variabilele noi (x,z) ecuaţia (1) reprezintă o ecuaţie diferenţială de
ordinul (n-1).
Exemplul 1.2
Să se integreze ecuaţia diferenţiala 2||| 2yyy
Rezolvare
Împărţim ambele parţi ale ecuaţiei la |yy dar preventiv aflăm soluţiile ei
determinate de egalitatea y=0 si 0| y din ultimele două relaţii găsim
soluţiile y=const.
Aducem ecuaţia iniţială la forma

52
y
y
y
y |
|
||
2
Observăm că ||ln2||ln2 ||
|
||
yydx
d
y
y
y
y şi deci ecuaţia
admite o integrală primă 2
1
| ycy , de unde 21
1
cxcy
.
Astfel ecuaţia considerată are soluţiile
cy şi 21
1
cxcy
2. Dependenţa liniară a funcţiilor.
Vom spune că funcţia )(),...,(),( 21 xxx n sunt liniar dependente pe
mulţimea RI dacă există n constante ),...,,,( 321 ncccc dintre care
cel puţin una dintre ele este diferită de zero astfel în cît are loc
identitatea
0)(...)()( 2221 xcxcxc nn Ix
(1)
În caz contrar, adică atunci cînd identitatea (1) are loc numai pentru
0...21 nccc vom spune că funcţia )(),...,(),( 21 xxx n
este liniar independentă pe mulţimea .
Exemplu
Funcţiile nxxx ,...,, 2
, sunt liniar independente pe R
Rezolvare
Fie că 0... 1
2
321
n
n xcxcxcc Rx
(2)
Dacă cel puţin un coeficient este diferit de zero atunci reiese că avem un
polinom cu o infinitate de soluţii, ceea ce contrazice teoremei
fundamentale a algebrei.
Vom spune că n funcţii-vectori

53
, ,
)(
)(
)(
)(
1
21
11
1
x
x
x
x
n
, ,
)(
)(
)(
)(
2
22
12
2
x
x
x
x
n
…. ,
,
)(
)(
)(
)(2
1
x
x
x
x
nn
n
n
n
Sunt liniar dependente de mulţimea RI dacă există n constante
),...,,,( 321 ncccc (nu toate egale cu zero), astfel în cît are loc identitatea
0)(...)()( 2221
xcxcxc nn Ix (3)
În caz contrar vom spune că aceste funcţii-vectori sunt liniar
independente pe mulţimea .
Remarcă.
În caz particular cînd )(),...,(),( 22 xxx n
sunt funcţii vectori
constante obţinem noţiunea de dependenţă liniară a vectorilor.
3. Ecuaţii diferenţiale liniare. Proprietăţi generale.
1). Noţiuni generale.
Ecuaţia diferenţială de forma
)()(...)()( 1
10 xFyxayxayxa n
nn
(1)
Unde funcţia 0)(0 xa se numeşte ecuaţie diferenţiala liniară de
ordinul n .
Vom presupune că funcţia Faaa n .,...,, 10 sunt definite şi continui pe
intervalul RI .
Dacă funcţia Ixxa ,0)(0 atunci pe acest interval ecuaţia (1) este
echivalentă, evident, cu ecuaţia de forma
)()(...)( 1
1 xfyxpyxpy n
nn (2)
Mai jos vom considera doar ecuaţii diferenţiale liniare de forma (2).
54
În virtutea teoremei de existenţă şi unicitate pentru ecuaţia (2) este
adevărată teorema de mai jos:
Teorema1. Dacă funcţiile )(),(),...,(1 xfxpxp n sunt continue pe
intervalul RI atunci pentru orice Ix şi pentru orice n numere
reale 110 ,...,, nyyy există o singură soluţie a ecuaţiei diferenţiale liniare
(2) definită pe întreg intervalul I şi care verifică condiţiile iniţiale
10
1
10
|
00 )(,)(,)(
n
n yxyyxyyxy
Problema 1.3
Să se demonstreze teorema 1
Dacă in ecuaţia diferenţiala (2) funcţia f nu este identică egală cu zero,
atunci ecuaţia (2) se numeşte ecuaţie diferenţiala liniară neomogena, iar
în caz contrar ecuaţia diferenţiala liniară omogenă.
Vom spune că ecuaţia diferenţială liniară omogenă
0)(...)( 1
1 yxpyxpy n
nn (3)
Este asociată ecuaţiei diferenţiale liniare neomogene (2)
Au loc următoarele proprietăţi ale soluţiilor ecuaţiilor diferenţiale
liniare:
1. Dacă )(x si )(x sunt soluţii ale ecuaţiei diferenţiale liniare
omogene (3), atunci funcţiile )()( xx sunt de asemenea
soluţii ale aceleiaşi ecuaţii;
3. Dacă )(x este soluţie a ecuaţiei diferenţiale liniare omogene
(3), si Rx atunci funcţia )(x este şi ia o soluţie a
aceleiaşi ecuaţie;
4. Dacă )(x este soluţie a ecuaţiei diferenţiale liniare
neomogene (2), iar )(x - soluţie a ecuaţiei liniare omogene
asociate (3) atunci funcţia )()( xx este o soluţie a ecuaţiei
liniare neomogene (2);
5. Dacă )(x şi )(x sunt două soluţii ale ecuaţiei diferenţiale
liniare neomogene (2), atunci funcţia )()( xx este soluţie
a ecuaţiei liniare omogene asociate (3).

55
2). Restabilirea ecuaţiei diferenţiale după sistemul fundamental de
soluţii.
Fie date n funcţii )(),...,(),( 21 xyxyxy n , despre care se ştie că ele
formează un sistem fundamental de soluţii ale unei ecuaţii diferenţiale
oarecare liniare omogene. Se pune problema de a respecta această
ecuaţie. Dat fiind faptul că funcţiile )(),...,(),( 21 xyxyxy n formează o
baza în spaţiul liniar al soluţiilor ecuaţiei, căutate pentru orice altă
soluţie y(x) a aceleiaşi ecuaţii funcţionale
)(),(),...,(),( 21 xyxyxyxy n vor fi liniar dependente şi, deci
Vronschianul lor va fi identic egal cu zero, adică
0
21
|||
2
|
1
21
nn
n
nn
n
n
yyyy
yyyy
yyyy
Ultima egalitate reprezintă o ecuaţie diferenţială în raport cu y(x) care
poate fi adusă la forma (3)
3. Micşorarea ordinului ecuaţiilor diferenţiale liniare omogene.
Dacă se ştie o soluţie Ixxy ,0)( a ecuaţiei diferenţiale (3) , atunci
ordinul acestei ecuaţii poate fi micşorat cu o unitate prin substituţia
)(*)()( 1 xyxyxz .
Problema 1.4
Să se formuleze şi să se demonstreze afirmaţia respectivă pentru cazul
cînd sunt cunoscute cîteva soluţii liniar independente ale ecuaţiei (3).
În cazul ecuaţiei diferenţiale liniare omogene de ordinul doi
0)()( 2
|
1
|| yxpyxpy (4)
Cunoaşterea unei soluţii ne nule conduce la integrarea ecuaţiei
diferenţiale (4).
În acest caz este mai preferabil aplicarea formulei Ostrogradschii-
Liuvil.
dxxpcyy
yyyyW )(exp, 1|
2
|
1
21
21 (5)
Unde 21, yy sunt soluţii arbitrare ale ecuaţiei diferenţiale (4).

56
Astfel dacă se ştie o soluţie 0)(1 xy a ecuaţiei diferenţiale (4) atunci
conform formulei (5) orice soluţie a acestei ecuaţii verifică ecuaţia
diferenţială de ordinul întîi pentru o oarecare constantă Rc 1
dxxpcyyyy )(exp 11
|
1
|
1
Dacă considerăm 11 c şi împărţim ambele părţi ale egalităţii la
)(2
1 xy ,ţinem relaţia
dxxp
yy
y
dx
d)(exp
112
11
De aici găsim o altă soluţie
,)(exp)(
1*)()( 12
1
12 dxdxxpxy
xyxy
Care împreună cu 1y formează un sistem fundamental de soluţii al
ecuaţiei diferenţiale (4).
4. Metoda variaţiei constantelor (metoda lui L’agranche).
Fie )(),...,(),( 21 xxx n un sistem fundamental de soluţii a ecuaţiei
diferenţiale liniare omogene (3). Pentru a scrie soluţia generală a
ecuaţiei neomogene (2) este suficient să găsim o soluţie particulară a ei.
Această soluţie poate fi găsită prin metoda variaţiei constantelor.
Ideea acestei metode constă în urmatoarele: soluţia particulară a ecuaţiei
neomogene (2) o căutăm în forma
)()(...)()()()()( 2211 xxcxxcxxcxy nn (6)
Unde )(),...,(1 xcxc n sunt funcţii necunoscute (’’ variem constantele’’)
. pentru a găsi aceste funcţii necunoscute formăm sistemul:
0)()(...)()()()(
0)()(...)()()()(
0)()(...)()()()(
1|1
2
|
2
1
1
|
1
|||
2
|
2
|
1
|
1
|
2
|
21
|
1
xxcxxcxxc
xxcxxcxxc
xxcxxcxxc
n
nn
nn
nn
nn
Sistemul obţinut în raport cu funcţiile )(),...,( ||
1 xcxc n are o singură
soluţie. Acest fapt permite să găsim soluţia particulară a ecuaţiei
diferenţiale liniare neomogene (2) în forma (6)

57
4.Ecuatii diferenţiale liniare cu coeficienţi constanţi.
1.) Vom studia mai jos ecuaţia diferenţială liniară omogenă
0... |
1
)1(
1
)(
0
yayayaya nn
nn
Coeficienţii căreia sunt numere reale.
Conform celor expuse în paragraful 3 ecuaţia dată posedă sistem
funcţional de n soluţii.
Mai jos vom studia problema algoritmică de găsire a acestor soluţii.
Operatorul nn
nn ayaDaDaDL
|
1
1
10 ...)(
Se numeşte operator diferenţial cu coeficienţi constanţi.
Exemplul 1.5
Considerăm ecuaţia diferenţiala 0|| yy . Conform celor expuse mai
sus găsim rădăcinile polinomului respectiv )(L şi anumite 12,1
deci funcţiile xx eyey 21 , sunt soluţii ale ecuaţiilor diferenţiale
considerate şi astfel formează un sistem fundamental de soluţii al acestei
ecuaţii.
Cele expuse mai sus reduc problema integrării ecuaţiei diferenţiale (1) la
problema găsirii rădăcinilor polinomului )(L , numit polinom
caracteristic. Menţionăm ca ecuaţia 0)( L se numeşte ecuaţie
caracteristică.
Exemplul 1.6
Considerăm ecuaţia diferenţială 04|| yy (2) rădăcinile
polinomului i22,1 . Sa examinăm funcţiile complexe de variabilă
reală
xixey ix 2sin2cos2
1 si xixey ix 2sin2cos2
2
înlocuim aceste funcţii în ecuaţia (2) ,ţinînd cont de faptul că derivata
funcţiei complexe
)()()( xiVxUxZ se defineşte cu ajutorul formulei
)()()( ||| xiVxUxZ putem să ne convingem că funcţiile 21, yy
transformă ecuaţia (2) într-o identitate.
Exemplul 1.7
Ne impune să lărgim noţiunea de soluţie a ecuaţiei diferenţiale (1) ,
luînd în consideraţie şi funcţiile complexe de variabilă reală, care
verifică această ecuaţie.
58
2). Sistemul fundamental de soluţii al ecuaţiei diferenţiale liniare
omogene cu coeficienţi complecşi.
Considerăm pentru început ecuaţia diferenţială liniară neomogenă cu
coeficienţi complecşi
)(... |
1
)1(
1
)(
0 xfzazazaza nn
nn
(3)
unde . CRfCaaa n :,,...,, 21 .
Remarcă: Toate proprietăţile soluţiilor ecuaţiei diferenţiale liniare cu
coeficienţi reali sunt adevărate şi pentru soluţiile ecuaţiei (3) , inclusiv
faptul că mulţimea soluţiilor ecuaţiei liniar omogene
0... |
1
)1(
1
)(
0
zazazaza nn
nn (4)
Formează un spaţiu vectorial de dimensiunea n asupra cîmpului C. Mai
jos prezentăm algoritmul construirii sistemului fundamental de soluţii al
ecuaţiei (4).
Problema 1.8
Să se demonstreze că funţiile complexe xx nee
...1 de variabilă reală x
unde Cn ,...,, 21 , sunt liniar independente asupra cîmpului C
atunci şi numai atunci , cînd ji pentru ji .
Doi operatori diferenţiali )(),( DMDL se numesc egali dacă ei au
acelaş domeniu de definiţie şi pentru orice funcţie CRy : din acest
domeniu are loc egalitatea yDMyDL )()( .
Vom defini suma şi produsul a doi operatori prin formulele:
yDMyDLyDMDL )()()()( ,
YDMDLDMDL )(*)()(*)( .
Problema 1.9
Se consideră doi operatori diferenţiali
pp
pp aDaDaDaDM
1
1
10 ...)(
qq bDbDbDbDN
1
1
10 ...)(
Să se demonstreze că produsul operatorilor )(*)( DNDM este un
operator diferenţial , coeficienţii căruia coincid cu coeficienţii
polinomului algebric )(*)()( NMK .
Remarcă Afirmaţia din problema de mai sus reduce operaţiile
elementare cu operatori diferenţiali cu coeficienţi constanţi la operaţiile

59
respective cu polinoame algebrice , aceşti operatori se mai numesc şi
operatori diferenţiali polinomiali.
Consecinţa 1. După cum orice polinom complex poate fi descompus în
factori liniari
))...()(()( 210 paM
Tot aşa şi polinomul operatorial )(DM poate fi descompus în factori
))...()(()( 210 pDDDaDM
Teorema 1 Fie m ....,, 21 rădăcini de multiplicităţile respective
mkkk ....,, 21 ale polinomului caracteristic )(L pentru ecuaţia (4)
atunci funcţiile xkxxxkxx mmmm exxeeekxee
11,...,,,...,,...,, 1111
Formează un sistem fundamental de soluţii al ecuaţiei diferenţiale (4).
Exemplul 2.0
Se consideră ecuaţia diferenţiala 043 |||| VV yy polinomul ei
caracteristic 345 43)( L rădăcinile
4,0,0 54321 conform teoremei 1 funcţiile
xx eexx 42 ,,,,1 formează un sistem fundamental de soluţii al ecuaţiei
considerate , astfel, soluţia generala a ecuaţiei poate fi scrisă în forma xx ececxcxccy 4
54
2
321
.
3). Ecuaţii diferenţiale liniare neomogene cu coeficienţi constanţi
complecşi şi partea dreapta in forma de kuazipolinom.
Vom studia mai jos ecuaţia diferenţiala
)()( xpeyxL m
x (6)
unde )(, xpC m polinom de gradul m cu coeficienţi complecşi.
Funcţia )(xpe m
xse numeşte kuazipolinom cu exponentul . Pentru a
găsi soluţia generală a acestei ecuaţii este suficient să găsim o soluţie
particulară a ei,Are loc teorema 2.
Teorema 2:
60
1) Dacă nu este rădăcina a polinomului caracteristic )(L
adică 0)( L atunci ecuaţia diferenţiala (6) posedă o soluţie
particulară de forma parţii drepte, adică de forma )(xQe m
x
unde )(xQm este un polinom de gradul m cu coeficienţi
complecşi;
2) Dacă este rădăcină de multiplicitatea k a polinomului
caracteristic )(L , atunci ecuaţia diferenţiala (6) posedă o
soluţie particulară de forma )(xQxe m
kx unde )(xQm este un
polinom de gradul m cu coeficienţi complecşi;
Demonstrare. Efectuăm substituţia zey x care reduce ecuaţia (6)la
forma
)()( xpzDL m (7)
Operatorul )( DL este un operator diferenţial polinomial in raport
cu D şi deci poate fi scris în forma
,nn
nn bDbDbDbDLDM
1
1
10 ...)()(
Iar ecuaţia (7) respectiv:
)()( xpzDM m (8)
Considerăm cazul nerezonant, adică 0)( L
Deoarece 0)()0( LM rezultă că 0nb să demonstrăm că
ecuaţia (8) admite o soluţie unica polinomială de gradul m.
Considerăm spaţiul mA de dimensiunea 1m ,format din polinoame
complexe de argument real de gardul n nu mai mare de cît m. Să
arătăm că operatorul mm AADM :)( este un izomorfism.
Se ştie că orice operator liniar în spaţiul finit dimensional cu baza dată
poate fi reprezentat printr-o matrice. Fixăm în spaţiul mA baza
m
m xexee ,...,,1 10 , evident că
112010 ,...,2,,1 mm meDeeDeeDeDe şi deci matricea
operatorului D în această bază are forma

61
0000
000
0002
0010
m
Observăm că pentru orice număr complex 0 operatorul D în
baza menţionată este reprezentat de o matrice triunghiulara cu elemente
din diagonala şi deci
De 0)( D
Astfel operatorul mm AAD : pentru orice 0 este un
izomorfism.
Deoarece 0)0( M reiese că rădăcinile polinomului )(M sunt
diferite de zero. Astfel conform consecinţei 1 si celor expuse mai sus
operatorul )(DM poate fi descompus în produsul a n izomorfisme şi
anume
)(*...*)()( 10 nDDbDM
Unde 0i de aici rezultă că si operatorul mm AAD : este un
izomorfism. Astfel pentru orice polinom mm Axp )( ecuaţia
diferenţiala (8) are o singură soluţie polinomială mm AxQz )( iar
ecuaţia iniţială (6), are respectiv soluţia
)(xQey m
x
Considerăm cazul rezonant. În acest caz operatorul )(DM are forma
k
kn
knk
kn
n DbDbDbDbDM *)......()( 00
Unde 0knb în ecuaţia
)()...()( 0 xpzDbDbzDM m
k
kn
kn
Efectuăm substituţia zDw k , care conduce la ecuaţia
)()...( 0 xpwbDb mkn
kn
(9)
Deoarece 0knb avem cazul nerezonant şi deci în virtutea celor
expuse mai sus ecuaţia (9) are o singură soluţie )(xQw m de unde

62
)(xQzD m
k . integrăm ultima egalitate de n ori, considerînd de
fiecare dată constanta de integrale egala cu zero, şi obţinem soluţia
ecuaţiei diferenţiale (8) de forma )(~
xQxz m
k revenind la variabila
iniţiala y , primim soluţia x
m
k exQxy )(~
a ecuaţiei iniţiale (6). Teorema este demonstrata.
Remarcă Soluţia particulară a ecuaţiei diferenţiale liniare neomogenă
poate fi găsită şi prin metoda coeficienţilor nedeterminaţi.
Exemplul 2.1
Să se integreze ecuaţia diferenţiala
)132(65 22||| xxeyyy x
Rezolvare
Ecuaţia caracteristică 0652 are rădăcinile 3,2 21
cărora le corespund următoarele soluţii xx eyey 3
2
2
1 , . Astfel
soluţia generală a ecuaţiei diferenţiale liniare omogene respective are
forma xx
m ececy 3
2
2
1.0. . Deoarece exponentul 2 a kuazipolinomului
din partea dreaptă a ecuaţiei date nu este rădăcină a polinomului
caracteristic, avem cazul nerezonant şi deci ecuaţia admite o soluţie de
forma părţii drepte, adică de forma )( 22
.. cbxaxey x
kn
Înlocuind această expresie în ecuaţie, găsim coeficienţii
048.0,24.0,1.0 cba astfel soluţia generală a ecuaţiei iniţiale
are forma
)048.024.01.0( 223
2
2
1.. xxeececy xxx
nm
4). Evidenţierea soluţiilor reale ale ecuaţiei diferenţiale liniare
omogene cu coeficienţi reali.
Considerăm ecuaţia diferenţială liniară omogenă cu coeficienţi reali
0...)( 1
10 yayayayDL n
nn 00 a (10)
Problema 2.2
Să se demonstreze că dacă )(xz este o soluţie complexă a ecuaţiei cu
coeficienţi reali (10) atunci funcţia )(Im),(Re xzxz sunt doua soluţii
reale ale acestei ecuaţii. Se ştie că dacă i~
este rădăcină de
multiplicitatea k a unui polinom cu coeficienţi reali, atunci şi

63
i~
va fi o rădăcină de aceiaşi multiplicitate. În virtutea
teoremei 2 rădăcinilor i şi i de multiplicitatea k le
corespund 2k soluţii complexe ale ecuaţiei diferenţiale (10) şi anume xikxixi exxee )(1)()( ,...,,
(11)
şi xikxixi exxee )(1)()( ,...,, (12)
Fiecare din ele generînd cîte două soluţii reale. Dintre toate soluţiile
reale obţinute doar 2k funcţii sunt liniar-independente asupra cîmpului
numerelor reale (de obicei cele generate de formulele (11) sau (12).
Exemplul 2.3
Să se integreze ecuaţia diferenţială 04|| yy
Ecuaţia caracteristică 042 are rădăcinile i22,1 , cărora le
corespund următoarele soluţii complexe şi, respectiv, soluţii reale
xzI
xzezi
m
ix
2sin,y
2cosRe,y2
22
112
11
22
Astfel soluţia generală a ecuaţiei diferenţiale iniţiale are forma
xcxcy 2sin2cos 21
2). Principiul superpoziţiei si evidenţierea soluţiilor reale ale ecuaţiei
diferenţiale liniare neomogenă cu coeficienţi reali (metoda amplitudei
complexe)
Principiul superpoziţiei: dacă )(1 xy este o soluţie a ecuaţiei diferenţiale
)()( 1 xFydL iar )(2 xy - o soluţie a ecuaţiei )()( 2 xFydL , atunci
)()( 21 xyxy este o soluţie a ecuaţiei diferenţiale
)()()( 21 xyxyydL .
Consecinţa 2. fie )(DL polinom diferenţial cu coeficienţi reali, iar
F(x) funcţie completă de variabilă reală. Dacă y(x) este o soluţie
completă a ecuaţiei )()( xFzdL , atunci Re z(x) va fi o soluţie reală
a ecuaţiei FydL Re)( , iar )(xzI m o soluţie reală a ecuaţiei
FIydL m)(

64
Exemplul 2,2
Să se integreze ecuaţia diferenţială xeyyy x cos5065 |||
(13)
Rezolvare . Soluţia generală a ecuaţiei diferenţiale liniare omogene
respective are forma xx ececy 2
6
1 . Deoarece
][cos )1( xix erexe , vom considera ecuaţia diferenţială cu
neomogenitatea complexă xiezzz )1(||| 5065
(14)
Daca z(x) va fi o soluţie particulară a ecuaţiei diferenţiale (14) , atunci
conform consecinţei 2 funcţia )(Re xz va fi o soluţie particulară a
ecuaţiei (13).
Găsim o soluţie particulară a ecuaţiei (14).
Observăm că exponentul cuazipolinomului din partea dreaptă nu este
rădăcină a ecuaţiei caracteristice 1,6,065 21
2 ,
aşadar avem cazul nerezonant şi deci există o soluţie particulară de
forma xiAez )1( , unde A este un număr complex.
Prin substituţie obţinem 506)1(4)1( 2 AAiAi deci
)71( iA . Astfel ,
)cos7sin()cossin7()sin(cos)71()71( )1( xxiexxexixexeiz xxxxi
este o soluţie particulară a ecuaţiei (14) şi deci
)cossin7(Re xxezy x va fi o soluţie particulară a ecuaţiei
(13).
Soluţia generală a ecuaţiei diferenţiale (13) are forma
)cossin7(2
6
1 xxeececy xxx .
Remarcă . deşi neomogenitatea ecuaţiei diferenţiale liniare cu
coeficienţi reali are forma specială xxPe m
x cos)( , sau
xxPe m
x sin)( , soluţia particulară reală a ecuaţiei poate să conţină
termeni de ambele forme.
6). Metoda integrării ecuaţiilor diferenţiale prin derivare
O metodă efectivă de găsire a soluţiei polinomiale a ecuaţiei liniare
cu neomogenitatea în formă de polinom ( numită metoda integrării
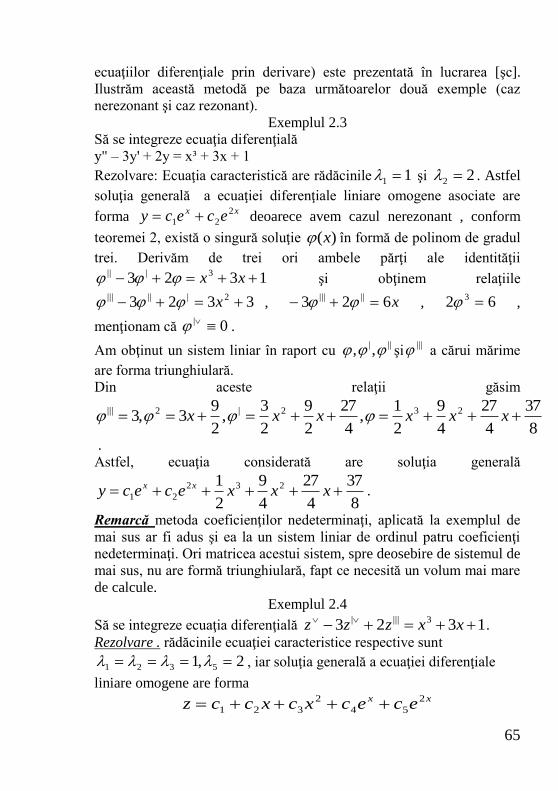
65
ecuaţiilor diferenţiale prin derivare) este prezentată în lucrarea [şc].
Ilustrăm această metodă pe baza următoarelor două exemple (caz
nerezonant şi caz rezonant).
Exemplul 2.3
Să se integreze ecuaţia diferenţială
y" – 3y' + 2y = x³ + 3x + 1
Rezolvare: Ecuaţia caracteristică are rădăcinile 11 şi 22 . Astfel
soluţia generală a ecuaţiei diferenţiale liniare omogene asociate are
forma xx ececy 2
21 deoarece avem cazul nerezonant , conform
teoremei 2, există o singură soluţie )(x în formă de polinom de gradul
trei. Derivăm de trei ori ambele părţi ale identităţii
1323 3||| xx şi obţinem relaţiile
3323 2|||||| x , x623 ||||| , 62 3 ,
menţionam că 0| .
Am obţinut un sistem liniar în raport cu ||| ,, şi
||| a cărui mărime
are forma triunghiulară.
Din aceste relaţii găsim
8
37
4
27
4
9
2
1,
4
27
2
9
2
3,
2
93,3 232|2||| xxxxxx
.
Astfel, ecuaţia considerată are soluţia generală
8
37
4
27
4
9
2
1 232
21 xxxececy xx.
Remarcă metoda coeficienţilor nedeterminaţi, aplicată la exemplul de
mai sus ar fi adus şi ea la un sistem liniar de ordinul patru coeficienţi
nedeterminaţi. Ori matricea acestui sistem, spre deosebire de sistemul de
mai sus, nu are formă triunghiulară, fapt ce necesită un volum mai mare
de calcule.
Exemplul 2.4
Să se integreze ecuaţia diferenţială 1323 3|||| xxzzz .
Rezolvare . rădăcinile ecuaţiei caracteristice respective sunt
2,1 5321 , iar soluţia generală a ecuaţiei diferenţiale
liniare omogene are forma xx ececxcxccz 2
54
2
321

66
să găsim o soluţie particulară polinomială a ecuaţiei neomogene.
Substituţia Wz ||| ne conduce la ecuaţia
1323 3||| xxWWW ,
Soluţia particulară a căreia are forma
8
37
4
27
4
9
2
1 23 xxxW
Vezi exemplul 2,3 de aici integrînd relaţia Wz |||, găsim o soluţie
particulară a ecuaţiei iniţiale
3456
48
37
32
9
80
3
240
1xxxxz
Şi deci soluţia generală a ei
.48
37
32
9
80
3
240
1 34562
54
2
321 xxxxececxcxccy xx
Remarcă după cum sa menţionat deja, ecuaţia (6) prin intermediul
substituţiei zey x* se reduce la ecuaţia (7) ceea ce permite aplicarea
metodei prezentate mai sus şi la ecuaţia de tipul (6).
7). Ecuaţia lui Euler.
Una din ecuaţiile diferenţiale reductibile la ecuaţiile liniare cu
coeficienţi constanţi este ecuaţia lui Euler
)(... |
1
)1(1
1
)(
0 xfyaxyayxayxa nn
nnnn
(15)
Teorema 3. Substituţia tex pentru 0x , sau
tex , reduce
ecuaţia lui Euler la o ecuaţie diferenţiala liniară cu coeficienţi constanţi
cu polinomul caracteristic
nnn aaanaL 110 )1(...)1)...(2)(1()(
.
Consecinţa 3. Polinomul )(L (numit polinom caracteristic al ecuaţiei
lui Euler) poate fi obţinut, dacă în forma părţii stângi a ecuaţiei lui Euler
(15) vom înlocui
).1)...(2)(1(),...,1(,,1 )(2| nyxyxxyy nnu

67
Găsind soluţia generală ( de variabila t) a ecuaţiei diferenţiale
liniare cu coeficienţi constanţi, menţionate mai sus, putem obţine soluţia
generală a ecuaţiei lui Euler (15) cu ajutorul substituţiei .||ln xt
Exemplul 2,5
Să se integreze ecuaţia lui Euler 02 |||2|||3 yxyyxyx .
Rezolvare. Substituţia tex ( pentru 0x ) şi
tex (pentru
0x ) reduce ecuaţia considerată la o ecuaţie diferenţială liniară
omogenă cu coeficienţi constanţi, al cărei polinom caracteristic,
conform, consecinţei 3, are forma
1)1(2)2)(1()( L
Polinomul )(L are rădăcinile .1,1 321 Astfel, ecuaţia
diferenţială liniară cu coeficienţi constanţi are soluţia generală tt etccecy )( 321 .
Aplicăm substituţia ||ln xt şi găsim soluţia generală a ecuaţiei
iniţiale
.|)|ln( 321 xxccx
cy
8. Şiruri recurente
Şir recurent de gradul P se numeşte şirul { nx }, definit prin formula
fxaxaxax nppnpnpn ...2211 (19)
(numit omogen, dacă 0nf pentru orice n natura, şi neomogen în caz
contrar).
Problema găsirii şirurilor recurente poate fi soluţionată prin analogie, cu
integrarea ecuaţiilor diferenţiale liniare coeficienţi constanţi.
5. Integrarea ecuaţiilor diferenţiale cu ajutorul seriilor
1. Noţiuni generale
O metodă efectivă de integrare a ecuaţiilor diferenţiale ( în special a
celor liniare) este metoda integrării ecuaţiilor diferenţiale cu ajutorul
seriilor.
Amintim, că funcţia RRy : se numeşte analitică în punctul 0x ,
dacă într-o vecinătate a acestui punct funcţia poate fi dezvoltată într-o
serie de puteri

68
...)(...)()()( 0
2
02010 n
n xxaxxaxxaaxy
(1)
Iar în cazul particular 00 x
......)( 2
210 n
nxaxaxaaxy
(2)
Funcţia )(xy se numeşte funcţie analitică pe intervalul I, dacă ea este
analitică în orice punct din acest interval.
Considerăm ecuaţia diferenţială liniară neomogenă
)()(...)( )1(
1
)( xfyxPyxPy n
nn
(3)
Cu condiţiile iniţiale
.)(,...,)(,)(1
00
)1(0
|
0
|
00
nn yxyyxyyxy
(4)
Teorema 1. Daca funcţia )(),...,(1 xpxp n sunt analitice pe intervalul
0,|| 0 xx , atunci ecuaţie diferenţială (3) pentru orice condiţii
iniţiale (4) posedă o singură soluţie analitică pe acest interval.
Consecinţă . daca )().(),...,(1 xfxpxp n sunt funcţii analitice pe R,
atunci şi soluţia problemei Coşi (3)-(4) poate fi scrisă în forma seriei
(1), ce converge pe R.
Coeficienţii Tailor ai soluţiei (1) pot fi calculaţi prin metoda
coeficienţilor nedeterminaţi.
Vom ilustra această teoremă, aplicînd-o la ecuaţii diferenţiale liniare
omogene de ordinul doi.
Exemplul 2,6
Să se integreze ecuaţia diferenţiala
0||| yxyy
Rezolvare . vom căuta soluţia ecuaţiei date în forma (2) prin metoda
coeficienţilor nedeterminaţi. Pentru început calculăm derivatele ei
......32 12
321
| n
n xnaxaxaay
...)1(...2*32 2
32
|| n
n xannxaay
Şi înlocuim expresiile obţinute în ecuaţia iniţială. Grupăm termenii de
pe lîngă aceleaşi puteri ale lui x şi obţinem relaţiile

69
0)1)(2(
...................................
023*4
02*3
02
2
224
113
02
nnn anaann
aaa
aaa
aa
De unde avem ...)2.1(,)2)(1(
12
na
nn
na nn .
Pentru a evidenţia două soluţii liniar independente putem considera
1,0 10 aa şi 1,1 10 aa
Astfel obţinem funcţiile xxy )(1 şi
...)!2(
32...
!8
5
!6
3
!4
1
!2
11)( 28642
2
nxn
nxxxxxy
Menţionăm că seria )(2 xy converge pentru orice Rx soluţia generală
a ecuaţiei date are forma
).()( 2211 xycxycy
2). Serii generalizate
Presupunem că funcţiile )().(),...,(1 xfxpxp n sunt fracţii raţionale
ireductibile, adică au forma )(
)(
xQ
xP unde P şi Q sunt polinoame de
variabila x. punctul 0x se numeşte punct singular al ecuaţiei diferenţiale
(3), dacă el reprezintă o rădăcină cel puţin a unuia din numitorii
fracţiilor menţionate.
Dacă 0x nu este punct singular al ecuaţiei diferenţiale (3), atunci soluţia
problemei Coşi (3)-(4) poate fi reprezentată în formă de serie (1), care
converge cel puţin pe domeniul || 0x unde este distanţa de la
punctul 0x pînă la cel mai apropiat punct singular al ecuaţiei
considerate.
Dacă 0x este un punct singular al ecuaţiei diferenţiale (3), atunci nici
într-o vecinătate a acestui punct nu există soluţii analitice de forma (1)
nx
x
x
x
.
2
1
0

70
ale ecuaţiei diferenţiale (3). În acest caz pentru unele condiţii
suplimentare soluţia ecuaţiei diferenţiale considerată în vecinătatea
punctului singular 0x poate fi căutata în formă de serie generală.
...])x-(xa)x-(xa[a)()( 2
020100 xxxy (5)
Unde R şi 00 a . Formula (5) poate fi aplicată şi pentru
,0xx dacă vom defini în acest caz ( iexxxx ||)( 00 ).
Considerăm de exemplul pe domeniul 0x ecuaţia diferenţială liniară
omogenă de ordinul doi
0)()(
2
||| yx
xqy
x
xpy
(6)
Unde p şi q sunt funcţii analitice , adică
0
)(k
k
k xpxp şi
0
)(k
k
k xqxq şi cel puţin unul dintre coeficienţii 110 ,, qpp este
diferit de zero .
Vom căuta soluţia ecuaţiei diferenţiale (6) în forma
)0(...),()( 0
2
210 axaxaxaxxy
(7)
Înlocuim funcţia y(x) în ecuaţia considerată şi prin metoda coeficienţilor
nedeterminaţi găsim relaţia pentru :
0)1( 00 qp
(8)
Teorema 2 . fie 21 , rădăcinile ecuaţiei (8).
1) Dacă 21 nu este un număr întreg, atunci ecuaţia
diferenţială (6) are un sistem fundamental de soluţii de forma
(7);
2) Dacă 021 m este un număr întreg atunci ecuaţia
diferenţială (6) are cel puţin o soluţie )(1 xy de forma (7);

71
3) Dacă 21 , atunci există doar o singură soluţie particulară
)(1 xy a ecuaţiei diferenţiale (6) de forma (7);
4) Dacă )0(,2,1 bbia , atunci există soluţii de forma (7)
pentru ambele rădăcini 21 , , în acest caz prin biax
vom
subînţelege ])lnsin()ln[cos( xbixbxx abia . separînd din
soluţie complexă (7) pentru bia partea reală şi cea
imaginară, obţinem doua soluţii reale independente ale ecuaţiei
(6).
Exemplul 2.7
Să se integreze ecuaţia diferenţială
0412)1(9 ||| yyyxx
(9)
Rezolvare . scriem ecuaţia considerată sub forma
0)1(9
4
)1(3
4 |||
yxx
yxx
y
Deoarece x=0 este un punct singular al ecuaţiei, vom căuta soluţiile
ecuaţiei sub forma (7). Menţionăm că
...)1(3
4
)1(3
4)( 2
xx
xxp
...)(9
4
)1(9
4)( 32
xxx
x
xxq
Şi deci .0,3
400 qp
Ecuaţia (8) în cazul acesta capătă forma 03
4)1( , de unde
0,3
721 . Conform teoremei 2 ecuaţia diferenţială (9) are două
soluţii liniar independente de forma:
...)( 2
2101 xaxaaxy
Şi

72
...)()( 2
2103
7
2 xbxbbxxy
Înlocuind în ecuaţia dată şi aplicînd metoda coeficienţilor nedeterminaţi,
găsim
...9*6*3
7*4*1
6*3
4*1
31)( 32
1 xxx
xy
...)16*13*10
14*11*8
3*10
11*8
10
81()( 323
7
2 xxxxxy
Seriile obţinute sunt convergente pentru 1|| x , soluţia generală a
ecuaţiei diferenţiale (9) are forma
)()( 2211 xycxycy .
3). Ecuaţia lui Besel
Astfel se numeşte ecuaţia diferenţială de tipul
0)( 22|||2 yxxyyx (10)
Unde .0
Menţionăm că ecuaţia lui Besel are o aplicaţie largă la diverse probleme
din fizică, tehnică.
Ecuaţia lui Besel reprezintă un caz particular al ecuaţiei (6).
Ecuaţia (8) pentru acest caz are forma
0)1( 2
De aici găsim .2,, 2121 conform teoremei 2
avem:
Dacă 2 nu este un număr întreg, atunci ecuaţia lui Besel are două
soluţii liniar independente de forma (7);
Dacă 02 este un număr întreg, atunci ecuaţia lui Besel posedă o
soluţie de forma (7);
Dacă 0 atunci există doar o soluţie a ecuaţiei (10) de forma seriei de
puteri (2).
4). Aplicarea seriilor Fourie la determinarea soluţiilor periodice
Fie dată o ecuaţie diferenţială liniară de ordinul doi cu coeficienţi
constanţi
)(||| xfqypyy (15)

73
Unde f(x) este o funcţie periodică cu perioada 2 şi definită cu ajutorul
seriei Fourie
1
0 )sincos(2
)(n
nn nxbnxaa
xf (16)
Soluţia periodică a ecuaţiei (15) poate fi căutată în formă de serie Fourie
1
0 )sincos(2
)(n
nn nxBnxAA
xy (17)
5). Metoda parametrului mic
Vom ilustra această metodă, elaborată de A.Puancare şi A.M.Liapunov,
cu ajutorul următoarei probe.
Considerăm ecuaţia diferenţială
),,,,()( |2|| yyxFxfyay
Unde este un parametru , iar partea dreaptă a ecuaţiei este o funcţie
periodică cu perioada 2 în raport cu x , fie )(0 xy - soluţia periodică a
ecuaţiei
)(2|| xfyay (19)
Se pune problema de a găsi soluţia periodică a ecuaţiei (18) pentru
valorile mici ale parametrului .
Vom cere ca funcţiile f şi F să fie continue în raport cu x, iar F –
analitică în raport cu celelalte variabile pe domeniul perspectiv. Atunci
după cum se ştie , soluţiile ecuaţiei (18) vor fi funcţii analitice în raport
cu , de aceea vom căuta soluţia periodică ),( xy a ecuaţiei (18) sub
formă de serie de puteri în raport cu
...)(...)()()(),( 2
2
10 xyxyxyxyxy n
n (20)
Dezvoltăm funcţia F în seria Tailor în raport cu ,, |yy în vecinătatea
punctului )0,,,( |
00 yyx :
...|)(|)(|)0,,(),,,()0,,,(
|
0)0,,(|0)0,,,(
|
02
||00
|00
|00
yyxyyxyyx
Fyy
y
Fyy
y
FyyxFyyxF
Înlocuim F şi funcţia ),( xy din (20) în ecuaţia (18), egalăm
coeficienţii de pe lîngă aceleaş puteri ale lui şi obţinem un sistem cu
un număr infinit de ecuaţii

74
)0,,,(
|
1)0,,,(|1)0,,,(2
2||
2
|
001
2||
1
0
2||
0
|00
|00
|00
|*|*|
)0,,,(
)(
yyxyyxyyx
Fy
y
Fy
x
Fyay
yyxFyay
xfyay
(21)
Exemplul 2,8
Să se determine aproximativ soluţia periodică a ecuaţiei diferenţiale 2|| sin2 yxyy
Unde este un parametru mic.
Rezolvare Vom căuta soluţia periodică în forma (20). Din sistemul (21)
pentru acest caz vom scrie doar două ecuaţii
xxyxyy sin)(sin2 00
||
0
şi
)2cos1(4
1)(sin2 1
2
1
||
1 xxyxyy
Astfel găsim aproximativ soluţia periodică a ecuaţiei iniţiale
)2cos1(4
1sin),( xxxy
6). Soluţii oscilatorii ale ecuaţiilor diferenţiale liniare de ordinul doi
Fie dată ecuaţia diferenţială liniară de ordinul doi
0)()( ||| yxqyxpy (1)
Coeficienţii căreia p(x) şi q(x) sunt funcţii definite şi continui pe
intervalul RI . Problema lui Coşi pentru această ecuaţie posedă o
singură soluţie pe I . În particular dacă soluţia se anulează împreună cu
derivata sa într-un punct oarecare I . Pentru soluţia netriviană z(x) ,
atunci 0)(| y ceea ce înseamnă că soluţia îşi schimbă semnul la
trecere prin zeroul .
Vom spune că o soluţie netrivială a ecuaţiei diferenţiale este oscilatorie
pe segmentul II 1 , dacă ea posedă cel puţin două zerouri pe acest
segment în caz contrar vom numi această soluţie neoscilatorie pe 1I
Teorema lui Şturm. Fie date ecuaţiile diferenţiale
75
0)(|| yxqy , şi 0)(|| zxQz , Ix , presupunem că
IxxQxq ),()( . Atunci între orice două zerouri consecutive 21 , xx
ale oricărei soluţii y(x) a primei ecuaţii există cel puţin un zerou al
oricărei soluţii y(x) a ecuaţiei a doua, care de altfel poate să coincidă cu
21 :_, xcusaux .
Consecinţa 1. dacă 0)( xQ pe segmentul I , atunci orice soluţie a
ecuaţiei (2) este neoscilatorie pe acest segment.
Consecinţa 2. zerourile oricăror două soluţii liniar independente ale
ecuaţiei (2) alternează, adică între orice două zerouri consecutive ale
unei soluţii se află un singur zerou al celeilalte soluţii.
7). Probleme la limite
1). Noţiuni generale
Soluţia generală a ecuaţiei diferenţiale liniare de ordinul doi
)),((),()()()( 2
|
1
||
0 baxxfyxayxayxay
(1)
Conţine două constante arbitrare 1c şi 2c . Pentru a evidenţia o soluţie
particulară punem condiţiile iniţiale 00 )( yxy şi 11
| )( yxy ,
formulînd în acest fel problema lui Coşi. Însă în multe probleme
practice pentru a evidenţia soluţii particulare se pun alte două condiţii.
De exemplu ca cele din următoarea problemă: să se găsească soluţia
ecuaţiei (1), care capătă valorile date la extremităţile segmentului [a,b],
sau în caz general care satisface condiţiile la limite
BbybyAayay )()(,)()( |
21
|
21
(2)
În cazul acesta vom spune, că este dată problema la limite (1)-(2). Dacă
0)( xf , atunci vom spune că este dată problema omogenă la limite.
Spre deosebire de problema lui Coşi pentru ecuaţia (1), care posedă o
singură soluţie, dacă )(),(),(),( 210 xfxaxaxa sunt funcţii continue,
problema la limite (1)-(2) cu două necunoscute poate să posede o
singură soluţie, o infinitate de soluţii sau să nu posede nici una.
Exemplul 2,9
Pentru ecuaţia diferenţială 0|| yy cu condiţiile la limite

76
0)(,0)0(
1)(.0)0(
1)1(,0)0(
||
||
||
yy
yy
yy
)6(
)5(
)4(
Problema la limite (3)-(4) posedă o singură soluţie, problema (3)-(5) nu
posedă nici o soluţie, iar problema (3)-(6) posedă o infinitate de soluţii.
Rezolvare
Întradevăr soluţia generală a ecuaţiei (3) are forma
xcxcy sincos 21 . Prin substituţie în (4), găsim 0,1sin
121 cc
şi deci 1sin
cos xy , în caz dacă înlocuim în (5), avem
0sin1 1 c , ceea ce nu poate fi în sfîrşit, în cazul condiţiilor (6)
obţinem xcy cos1 , unde 1c este o constantă arbitrară.
2), Valori proprii ale problemei la limite.
Să se demonstreze că problema la limite
0|| yy (7)
0)()0( yy (8)
Posedă o soluţie netrivială atunci şi numai atunci, cînd 2n
( Zn ). Să se găsească această soluţie.
Valoarea parametrului , pentru care problema la limite
yy (9)
0)()(,0)()( |
21
|
21 bybyayay (10)
Posedă cel puţin o soluţie netrivială, se numeşte valoare proprie a
acestei probleme la limite, iar soluţia respectivă se numeşte funcţie
proprie.
Exemplul 3,0
Să se găsească valorile proprii şi funcţiile proprii ale problemei la limite
)0(,0)()0(, ||| llyyyy
Rezolvare

77
Pentru 0 avem 21 cxcy şi condiţiile la limite sunt satisfăcute
numai de soluţia trivială şi, deci, 0 nu este o valoare proprie. Fie
0 , atunci soluţia generală a ecuaţiei 0|| yy are forma:
xx ececy 21
Dintre aceste funcţii doar soluţia trivială 0y satisface condiţiile la
limite. Dacă 0 atunci soluţia generală are forma
xcxcy cossin 21
Dacă aplicăm condiţiile la limite, căpătăm 02 c şi
0)cos(1 lc . Aşadar problema la limite posedă soluţie
netrivială, dacă
nl 2
, adică
22
2
1
ln
,
...3.2.1.0n . Acestor valori proprii le corespund funcţiile proprii
...3.2.1.0,2
1sin)(
n
l
xnxyn
3), Probleme neomogene la limite. Funcţia lui Grin pentru problema
la limite
Considerăm ecuaţia diferenţială
)()()( 2
|
1
|| xfyxpyxpy
(11)
Cu condiţiile la limite omogene (10). Presupunem, că această problemă
la limite posedă o singură soluţie.
Fie )(1 xy - o soluţie netrivială a ecuaţiei diferenţiale omogene
0)()( 2
|
1
|| yxpyxpy
(12)
Care satisface prima condiţie la limită din (10), )(2 xy - o soluţie
netrivială, care satisface condiţia a doua la limită, iar W(x) vroncsianul
lor.
Soluţia )(1 xy nu satisface simultan şi cea de-a doua condiţie la limită,
căci, în caz contrar, am obţine o infinitate de soluţii ale problemei la
limite (11)-(10) ceea ce este în contradicţie cu presupunerea, că această

78
problemă posedă o singură soluţie. Acelaşi lucru are loc şi pentru
)(2 xy şi de aceia avem
0)()(,0)()( |
2211
|
2221 bybyayay
(13)
Vom căuta soluţia ecuaţiei diferenţiale neomogene (11) cu ajutorul
metodei variaţiei constantelor. Prin urmare găsim soluţia generală a
ecuaţiei (11)
)()()(
)()()(
)(
)()()()( 2211
12
21 xyxydt
tW
tftyxydt
tW
tftyxyxy
x
a
b
x
(14)
Folosind inegalităţile (13) şi condiţiile la limite (10), evidenţiem din
formula (14) unica soluţie a problemei la limite (11)-(10), şi anume acea
soluţie, care corespunde valorilor 0,0 21 .
Astfel putem prezenta soluţia problemei la limite (11)-(10) sub forma
b
a
dttftxGxy )(),()(
(15)
unde
btxaxytytW
bxtaxytytW
txG
),()()(
1
,),()()(
1
),(
21
21
(16)
Funcţia G(x,t) se numeşte funcţia lui Grin a problemei la limite (11)-
(10). Dacă se ştie această funcţie, atunci putem scrie soluţia problemei
neomogene la limite pentru orice neomogenitete f(x).
Funcţia G(x,t), pentru orice valoare fixată a variabilei t, posedă
următoarele proprietăţi:
Pentru tx funcţia G(x,t) satisface ecuaţia diferenţială
omogenă (12);
Pentru ax şi bx funcţia G(x,t) satisface prima şi
respectiv a doua condiţie la limită (10):
79
Pentru tx funcţia G(x,t) este continuă, iar derivata ei în
raport cu x suferă un salt de mărimea 1:
1||);,0(),0( 0
|
0
| txxtxx GGttGttG
(17)
Întradevăr, să demonstrăm ultima relaţie, celelalte fiind evidente. Avem
De unde găsim
1)(
)()()()(|| 2
|
1210
|
0
|
tW
tytytytyGG txxtxx
Se poate arăta că proprietăţile 1)-3) definesc în mod univoc funcţia lui
Grin, adică orice funcţie ),( txG cu proprietăţile 1)-3) are forma (16).
Aceste proprietăţi şi sunt puse la baza definiţiei funcţiei lui Grin a
problemei la limite (11)-(10).
Funcţiei lui Grin a problemei la limite (11)-(10) se defineşte în mod
analog, cu excepţie egalităţii a doua din (17), care este înlocuită cu
egalitatea
)(
1||
0
0
|
0
|
taGG txxtxx
Aşadar, pentru a găsi funcţia lui Grin a problemei la limite (11)-(10) ,
trebuie să găsim două soluţii )(1 xy şi )(2 xy ale ecuaţiei omogene,
care satisfac prima şi respectiv a doua condiţie la limită din (10). Dacă
)(1 xy nu satisface simultan ambele condiţii (10), atunci funcţia lui
Grin există şi poate fi căutată sub forma
bxtaxyt
btxaxyttxG
),()(
),()(),(
2
1
Funcţiile )(t şi )(t sunt determinate de condiţiile 1)-3). Adică
btxaxytytW
bxtaxytytW
Gx
),()()(
1
,),()()(
1
21
21

80
.)(
1),()()()(),()()()(
0
|
2
|
212ta
tyttyttyttyt
Ştiind funcţia lui Grin ),( txG scriem soluţia problemei la limite cu
neomogenitatea f(x) cu ajutorul formulei
b
a
dttftxGxy )(),()(
Exemplul 3,1
Să se construiască funcţia lui Grin pentru problema la limite
0)(,0)0(),( ||| yyxfyy
Rezolvare
Soluţia generală a ecuaţiei diferenţiale 0|| yy are forma
xcxcy sincos 21 .observăm că soluţia xxy cos)(1 satisface
condiţia 0)0(| y ,iar soluţia xxy sin)(2 - a doua condiţie
0)( y , de aceea vom căuta funcţia lui Grin sub forma
xtaxt
txaxttxG
,sin)(
,cos)(),(
Unde funcţiile )(t şi )(t vor fi determinate din condiţiile (18), care
în cazul acesta capătă forma
1cos)(sin)(
0sin)(cos)(
xtxt
xtxt
Rezolvînd acest sistem găsim tttt cos)(,sin)( , şi, deci,
funcţia lui Grin
xtxt
txxttxG
0,sin*cos
0,cos*sin),(

81
III.NOŢIUNI GENERALE DESPRE SISTEME DE
ECUAŢII DIFERENŢIALE
III.1.1.Definiţii.
Vom numi sistem de ecuaţii diferenţiale de formă normală
sistemul:
,,...,,,
,,...,,,
211
2111
n
n
n
xxxtfdt
dx
xxxtfdt
dx
(1)
unde t ЄR este variabila independentă,Domeniul comun de
definiţie al funcţiilor nif i ,...,1 se numeşte domeniul de
definiţie al acestui sistem,iar numărul n este ordinul sistemului.
Dacă notăm cu x şi f vectorii cu
coordinatele nxxxx ,...,, 21 şi respectiv nffff ,...,, 21 ,
atunci sistemul (1) poate fi scris sub forma unei ecuaţii vectoriale
xtfdt
dx, ., 1 nRGxt (2)
Vector-funcţia RIRI n : se numeşte soluţie a ecuaţiei
(2) pe intervalul I ,dacă este definită şi derivabilă pe acest
interval, ItGtt şi are loc identitatea
ttf
dt
td
, ( It )
Graficul funcţiei se numeşte curbă integrală a ecuaţiei.
Dacă partea dreaptă a ecuaţiei (2) nu conţine în mod explicit
variabila independentă t , atunci ecuaţia
xfdt
dx nRDx (3)
Se numeşte ecuaţie autonomă ,iar sistemul respectiv se numeşte
sistem autonom de ecuaţii diferenţiale.
III.1.2.Cîmpuri de direcţii şi sisteme de ecuaţii diferenţiale.

82
Vom numi cîmp de direcţii pe domeniul nRD ,aplicaţia ce pune
în corespondenţă fiecărui punct din D o dreaptă care trece prin
acest punct.
Curba diferenţială este numită curbă integrală a cîmpului de
direcţii,dacă tangenta în orice punct al ei coincide cu dreapta
cîmpului de direcţii în acest punct.
Amintim, că o dreapta, ce trece prin punctul
....1
11
n
nn
a
xx
a
xx
Prin urmare, a defini un cîmp de direcţii pe un domeniu nRD
înseamnă a defini în fiecare punct Dxxx n ,...,1 o dreaptă
cu ajutorul relaţiilor
xa
xx
xa
xx
n
nn
...1
11 (4)
Pe de altă parte, diferenţiala variabilei independente în acest
punct dat coincide cu creşterea ei în acest punct şi,deci,
.,...,111
nnn xxdxxxdx
Faptul acesta ne permite să asociem fiecărui cîm de direcţii un
sistem de forma
....
1
1
xa
dx
xa
dx
n
n (5)
Invers,fiecărui sistem de forma (5),caracterizat de condiţia
,0...22
1 xaxa n
îi punem în coincidenţă un cîmp de direcţii comform următoarei
reguli:punctul nxxx ,...,1 îi corespunde dreapta (4),ce trece
prin acest punct cu vectorul director .,...,1
xaxa n
Sistemele de forma (5), care satisface condiţia (6), se
numescsisteme de ecuaţii diferenţiale de forma simetrică.
Ecuaţia (2) determină pe domeniul său de definiţie un cîmp de
direcţii în felul următor: punctului

83
nRRGxt , , i pune în corespondenţă dreapta, ce trece prin
acest punct cu vectorul director 1,,1 nRxtf .Prin acest cîmp
de direţii sistemul (5) ia forma
xtf
dx
xtf
dxdt
n
n
,...
,1 1
1 . (7)
Teorema 1.Graficul oricărei soluţii a ecuaţiei (2) este o curbă
integrală a cîmpului de direcţii (7), definit de această ecuaţie şi
invers:orice curbă integrală a acestui cîmp de direcţii reprezintă
graficul unei soluţii a ecuaţiei. (2).
III.1.3.Cîmpuri vectoriale şi ecuaţii diferenţiale.
Vom numi cîmp vectorial de direcţii pe domeniul nRD ,aplicaţia ce pune în corespondenţă fiecărui punct din D
un vector cu originea în acest punct.
Orice ecuaţie diferenţială autonomă (3) defineşte pe domeniul său
de definiţie nRD un cîmp vectorial în felul următor: punctului
Dx i se pune în corespondenţă vectorul xf cu originea in
acest punct.
Mulţimea D se numeşte spaţiu fazic,iar mulţimea 1 nRDR
respectiv spaţiu fazic extins al ecuaţiei (3).Imaginea oricărei
soluţii a ecuaţiei se numeşte curbă fazică (traiectorie fazică) a
cîmpului vectorial,definit de această ecuaţie.
Considerăm sistemul bidimensional autonom de ecuaţii
yxfdt
dy
yxgdt
dx
,
,, (8)
şi respectiv ecuaţia
yxg
yxf
dx
dy
,
, , (9)
cu DCgf 1, 2RD .
Teorema 2. Pe domeniul unde ,0g curbele fazice ale sistemului
(8) coincid cu curbele integrale ale ecuaţiei (9).
84
Observaţie.Orice ecuaţie diferenţiala de ordinul n de formă
normală 11 ,,, nn yyyxfy
poate fi redusă cu ajutorul substituţiilor
xyxy
xyxy
xyxy
n
n
1
2
1
.........
'
la un sistem de ecuaţii diferenţiale
.,...,,,
................
21
1
32
21
n
n
n
n
yyyxfdx
dy
ydx
dy
ydx
dy
ydx
dy
III.1.4.Problema Cauchy.
Sistemul
,
,,
xtx
xtfdt
dx
(11)
Format din ecuaţia diferenţială (2) şi condiţia iniţială xtx
,, nRRGxt se numeşte problemă Cauchy.Soluţii ale
problemei Cauchy (11) sunt numite soluţiile ecuaţiei diferenţiale
(2), care verifică condiţia iniţială respectivă.Din punct de vedere
geometric soluţionarea problemei Cauchy (11) înseamnă găsirea
curbelor integrale a acuaţiei (2), care trec prinpunctul Gxt , .
Vom spune că funcţia xtfu , 1,: nn RGRGf
satisface condiţia lui Lipschitz în raport cu variabila nRx pe
domeniul G, dacă existăun număr L>0 astfel încît pentru orice
două puncte 1, xt şi 2, xt din g are loc inegalitatea
85
2121 ,, xxLxtfxtf
Vom nota cu z una din normele vectorilor nzzz ,...,1 în
spaţiul nR , de exemplu , ....22
1 nzzz
Observaţie. Pentru ca funcţia-vector xtfu , Gxt , să
verifice condiţia lui Lipschitz în raport cu variabila nRx pe
domeniul G este suficient ca orice componentă if a ei să posede
derivate parţiale ,,...,1 njx
f
i
i
mărginite pe G .(Demonstraţii)
Vom spune că Gxt , este un punct de existenţă al ecuaţiei
diferenţiale (2), dacă existăcel puţin o soluţie a problemei Cauchy
(11), El se numeşte punct de unicitate al ecuaţiei diferenţiale (2) ,
dacă orice două soluţii ale problemei Cauchy (11) coincid intr-o
vecinătate a punctului t ,in caz contrar el este numit punct
singular al ecuaţiei (2).
Teorema lui Cauchy.(teorema de existenţă şi unicitate).Dacă
funcţia nn RRGRGf : este definită, continuă şi verifică
condiţia lui Lipschitz în raport cu variabila nRx
Pe o vecinătate a punctului Gxt , , atunci acest punct este
unpunct de unicitate al ecuaţiei diferenţiale (2).
Observaţie.Notăm soluţia problemei Cauchy (11) cu
.,, xtty Dacă funcţia GCf r , atunci şi funcţia
xrtx ,, va fi derivabilă de r ori într-o vecinătate a punctului
ttt ,, .
Curba integrală a ecuaţiei (2),formată doar din puncte
singulare ale ecuaţiei ,se numeşte curbă integrală singulară ,iar
soluţia respectivă soluţie singulară.
Funcţia ctx , cu nRc se numeşte soluţie generală a
ecuaţiei diferenţiale (2) pe domeniul 1 nRG , dacă pentru orice
punct de unicitate Gxt , este un vector nRc astfel încît
funcţia ctx , este soluţie a problemei Cauchy (11).
86
Vom spune că soluţia a ecuaţiei (2) , definită pe intervalul
I , se numeşte prelungire a soluţiei , a aceleiaşi ecuaţii cu
intervalul de definiţie I , dacă II , şi ambele funcţii pe
intervalul I .Soluţia ce nu admite prelungiri, se numeşte soluţie
neprelungibilă.
III.1.5.Ecuaţii diferenţiale şi sisteme dinamice.
Teorema 4.Dacă tx It este o soluţie a ecuaţiei
autonome (3) cu condiţia iniţială xtx , atunci pentru oricare
Rr funcţia rty rIt ete ţi ea soluţie a aceeaşi
ecuaţii cu condiţia iniţială xrty .
Corolar. Mulţimea punctelor integrale ale ecuaţiei autonome (3)
este invariantă la translări paralele de-a lungul axei Ot.
Din considerentele de mai sus condiţia iniţiala pentru ecuaţia
autonomă se ia în momentul 0t .Vom nota cu xo, ,soluţia
ecuaţiei autonome (3) care verfică condiţia iniţială .,0 xx
Familia de aplicaţii ,: nn
t RRg definită prin xtxg t , ,
este o familie monoparametrică de difeomorfisme, munită flux
bazic,care posedă următoarele proprietăţi:
1. g este transformare identică.
2. stst ggg Rst ,
3. xgxtgRRRg t
nn ,,: , este o aplicaţie
diferenţiabilă.
În matematica contemporană a căpătat o largă aplicaţie teoria
sistemelor dinamice,definite în mod axiomatic ca grupuri
monoparametrice de homemorfizme ale unui spaţiu fazic,care
posedă proprietătile 1-3 cu o singură schimbare şi anume:aplicaţia
g se consideră doar continuă.
Se poate arăta că orice ecuaţie diferenţială (3) generează local un
sistem dinamic.
Exemplul 1.1 Să se afle fluxul fazic al sistemului
87
,1
,
y
xx
Rezolvare.Soluţia generală a sistemului are forma
21 , ctyecx t .Astfel soluţia sistemului, care verifică
condiţiile iniţiale yyxx 0,0 , este
ytyexx t , .Prin urmare,fluxul fazic al sistemului dat se
determină cu ajutorul formulei tyxeyxg t
t ,, . Să
verificăm proprietăţile 1-3. Familia tg este o familie de
dimorfizme(demonstraţii). Aplicaţia
tyxeyxtgRRRg t ,,,,: 22 este de clasă
C .Evident, g este transformarea identică. Afară de aceasta,
tsyexesyxegyxggyxgg tss
tstst ,,,,
.,, yxgtsyxe st
ts
Prin urmare are loc şi proprietatea 2.
III.2.DERIVATA FUNCŢIEI ÎN RAPORT CU CÎMPUL
VECTORIAL.INTEGRALE PRIME.
III.2.1.Derivata funcţiei în raport cu cîmpul vectorial.
Fie dată funcţia RDU : , nRD şi vectorul
Rvvv n ,......,1 cu originea în punctul Dx .Derivata
funcţiei U în raport cu vectorul v se numeşte derivata funcţiei
tvxU în punctul 0t (în caz dacă acesta există).Ea se
notează cu
n
i
i
i
tv vx
xUtvxU
dt
dxUL
1
0
0 .
Observaţie.Ultima sumă nu este altceva decît produsul scalar
,,vxU unde
nx
U
x
UU ,.......,
1
este gradientul
funcţiei U.

88
Fie dat cîmpul vectorial V pe domeniul nRD .Derivata funcţiei
U în raport cu cîmpul vectorial V se numeşte funcţia
RDULv : ,valoarea căreia în punctul Dx este egală cu
derivata funcţiei U în raport cu vectorul V(x) , adică
xULxUL xVv .Funcţia ULv se mai numeşte derivata Lie a
funcţiei U (în raport cu cîmpul vectorial V).
III.2.2.Integrale prime ale ecuaţiilor diferenţiale. Fie dată ecuaţia diferenţială autonomă
xfdt
dx ,nRDx (1)
Funcţia continuă RDU 1: DD 1 ,care ia valoare constantă
de-a lungul oricărei curbe fazice a ecuaţiei (1) ,se numeşte
integrală primă a acestei ecuaţii pe domeniul 1D .Prin urmare,
dacă U este o integrală primă a ecuaţiei (1) , atunci curbele fazice
ale acestei ecuaţii se află pe suprafeţele de nivel ale funcţiei U.În
cele ce urmează vom exclude cazul banal .. 1DxconstxU
Observaţie. Dacă RDU 1: este o integrală primă a ecuaţiei
(1) şi RR : este o funcţie continuă, atunci funcţia
RDU 1: este de asemenea o integrală primă acestei
ecuaţii.
Exemplul 2.1. Să se arate că funcţia 2xyU sete o funcţie
integrală primă a sistemului aotonom.
ydt
dy
xdt
dx2
Rezolvare.Orice soluţie a sistemului dat are
forma: ., 2
2
1
tt ecyecx Prin urmare ,
..,2
21
22
2
2
1 RtconstccecectytxU tt
Prin derivata funcţiei RDU : în virtutea ecuaţiei autonome (1)
vom întelege derivata Lie a acestei funcţii în raport cu cîmpul
vectorial respectiv.
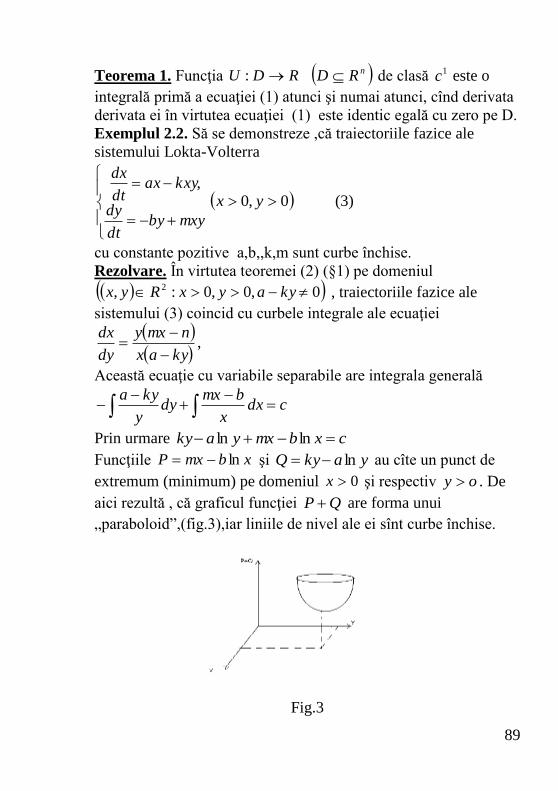
89
Teorema 1. Funcţia RDU : nRD de clasă 1c este o
integrală primă a ecuaţiei (1) atunci şi numai atunci, cînd derivata
derivata ei în virtutea ecuaţiei (1) este identic egală cu zero pe D.
Exemplul 2.2. Să se demonstreze ,că traiectoriile fazice ale
sistemului Lokta-Volterra
mxybydt
dy
kxyaxdt
dx, 0,0 yx (3)
cu constante pozitive a,b,,k,m sunt curbe închise.
Rezolvare. În virtutea teoremei (2) (§1) pe domeniul
0,0,0:, 2 kyayxRyx , traiectoriile fazice ale
sistemului (3) coincid cu curbele integrale ale ecuaţiei
,kyax
nmxy
dy
dx
Această ecuaţie cu variabile separabile are integrala generală
cdxx
bmxdy
y
kya
Prin urmare cxbmxyaky lnln
Funcţiile xbmxP ln şi yakyQ ln au cîte un punct de
extremum (minimum) pe domeniul 0x şi respectiv oy . De
aici rezultă , că graficul funcţiei QP are forma unui
„paraboloid”,(fig.3),iar liniile de nivel ale ei sînt curbe închise.
Fig.3
90
Aceste linii de nivel sînt exact traiectoriile fazice ale sistemului
(3).
Observaţie.Nu orice ecuaţie diferenţială autonomă posedă
integrale prime pe tot domeniul de definiţie.
Exemplul 2.3.Sistemul autonom
yy
xx 2 (4)
nu posedă integrale prime pe 2R diferite de o constantă.Într-
adevăr , dacă există o integrală primă RRU 2: a sistemului dat,
atunci U ia valoare constantă de-a lungul fiecărei curbe fazice .
2
2 , tt
i ecyecx Din continuitatea funcţiei U rezultă că
0,0,, 0
2
000 UeyexUyxU tt pentru t şi orice punct
2
00 , Ryx .Prin urmare, 0,0, 00 UyxU .Astfel funcţia U
este constantă pe 2R .În acelaşi timp funcţiile txeU 2
1
şi tyeU 2 iau valori constante de-a lungul curbelor integrale ale
sistemului considerat.
Exemplu.2.4 Să se arate că sistemul (4) posedă integrale prime pe
domeniul 0:, 2 xRyx .
Vom numi integrală primă a ecuaţiei diferenţiale
xtfdt
dx, 1, nRGxt (5)
orice integrală primă a sistemului autonom
.1
,,
dx
dt
xtfdt
dx
Observaţie. Orice ecuaţie diferenţială autonomă (1) , privită ca
un cay particular al ecuaţiei de formă generală (5), posedă cel
puţin o integrală primă pe spaţiu fazic extins. Aceste funcţii se
mai numesc integrale prime ale ecuaţiei autonome (1) ce depind
de timp.

91
III.2.2. Integrale prime ale cîmpului de direcţii.
Orice ecuaţie diferenţială autonomă defineşte un cîmp vectorial,
care, la rîndul său ,defineşte uncîmp de direcţii pe spaţiu fazic.
Observaţie. Dacă funcţia RDU : nRD este o integrală
primă a unui cîmp de direcţii, atunci suprafeţele ei de nivel sunt
formate din curbele integrale ale acestui cîmp de direcţii.
Se consideră cîmpul de direcţii, determinat de sistemul
xa
dx
xa
dx
n
n ...1
1 nRDx (6)
cu condiţia
0...22
1 xaxa n Dx (7)
Teorema 2. Funcţia derivabilă RDU : este o integrală primă
acîmpului de direcţii (6) pe domeniul DD 1 , atunci ţi numai
atunci,cînd se anulează produsul scalar
n
i
i
i
xx
UxaxU
1
0, 1Dx
Unde .,.....,1 xaxaxa n
Demonstraţie. Fixăm un punct arbitrar Dx . Vectorul 0xU
este perpendicular pe suprafaţa de nivel 0xUxU , ce trece
prin punctul 0x , adică este perpendicular pe planul tangent la
această suprafaţă în punctul dat. Pe de altă parte, curba integrală a
cîmpului de direcţii (6) ce trece prin punctul 0x , aparţine
suprafeţei de nivel considerate şi, prin urmare vectorul tangent la
ea aparţine planului tangent la această suprafaţă în punctul dat.
Astfel, vectorii 0xU şi 0xa sunt perpendiculari şi, deci ,
0, 00 xaxU .
Din cele expuse urmează , că noţiunea de integrală primă pentru
cîmpuri de direcţii generalizează noţiunea analogică pentru
ecuaţii diferenţiale şi anume , integralele prime ale ecuaţiei
diferenţiale autonome coincid cu integralele prime ale cîmpului de
direcţii, definit de această ecuaţie pe spaţiu fazic.
92
Observaţie. Dacă cîmpul de direcţii întrun sistem de coordonate
pe domeniul D are forma
,,...,,0,,..., 111 xaxaxaxa nxx adică este perpendicular pe
axa de coordonate iOx , atunci, evident n funcţia ixU este o
integrală primă a acestui cîmp de direcţii şi fracţia respectivă 0
idx
din sistemul (5) poate fi omisă, reducînd astfel ordinul
sistemului.
Vom căuta curbele integrale ale cîmpului de direcţii (6) ca
intersecţie a hipersuprafeţelor de nivel a n-1 integrale prime
11 ,...., nUU .Pentru aceasta este suficient ca în orice punct din D
vectorii normali la hipersuprafeţele de nivel ale acestor integrale
prime, să fie liniar independenţi. În calitate de vectori normali la
hipersuprafeţele menţionate putem lua vectorii
.,...,,...,,..., 1
1
11
1
1
11
n
nnn
n x
U
x
UU
x
U
x
UU Astfel,
condiţia suficientă expusă mai sus este echivalentă cu condiţia ca
matricea, linia căreia sunt formate din coordonatele acestor
vectori, să fie de rang maximal în orice punct. Ultima condiţie
asigură independenţa funcţională a integralelor prime
11 ,......, nUU pe domeniul D, ceea ce înseamnă că nici una din ele
nu poate fi exprimată ca o funcţie de celelalte.
Vom spune că orice sistem de n-1 integrale prime funcţionale
independente pe domeniulnRD formează un sistem
fundamental de integrale prime ale cîmpului de direcţii (6) pe
domeniul D.
Observaţie. Orice ecuaţie diferenţială (1) admite nu mai mult
decît n-1 integrale prime funcţional independente pe domeniul nRD .
Teorema 3. Orice cîmp de direcţii (6), caracterizat de condiţia (7)
în vecinătatea oricărui punct din domeniul D posedă un sistem
fundamental de integrale prime.
Exemplu.2.5. Să se integreza sistemul

93
xy
dz
yz
dy
xz
dx
Rezolvare. Din egalitetea
yz
dy
xz
dx
găsim o integrală primă y
xU 1 .Formulăm relaţia
.xy
dz
xyzxyz
xdyydx
de unde găsim o integrală primă 2
2 2 zxyU .
Aceste integrale prime sunt funcţional independente. Prin urmare,
curbele integrale ale sistemului dat se determină cu ajutorul
relaţiilor 2
2
1 2, czxycy
x .
III.3.SISTEME LINIARE DE ECUAŢII DIFERENŢIALE
III.3.1.Noţiuni generale Vom numi sistem de ecuaţii diferenţiale sistemul de forma
tfxtaxtaxtadt
dx
tfxtaxtaxtadt
dx
nnnnnn
n
nn
...
..............
...
2211
112221111
(1)
unde RIRIfa iij :, sunt funcţii continue nji ,........1, .
Să considerăm matricea
n
jiji tatA1,,
, vectorii
tftftfxxx nn ,......,,,......, 11 . În aceste notări, sistemul
(1) obţine forma ecuaţiei
tfxtAdt
dx (2)
Dacă inecuaţia (2) vector-funcţia f nu este identic egală cu zero,
atunci vom spune căecuaţia (2) este liniară neomogenă., în caz
contrar liniară omogenă. Ecuaţia liniară omogenă

94
xtAdt
dx (3)
se numeşte ecuaţie liniară omogenă asociată ecuaţiei liniare
neomogene (2).
Teorema lui Cauchy. Pentru orice It 0 şi nRx 0 problema
Cauchy
,
,
00 xtx
tfxtAdt
dx
posedă o singură soluţie, definită pe ăntreg intervalul I.
Corolar. Dacă soluţia ecuaţiei liniare omogene (3) se anulează
într-un punct , atunci ea este identic egală cu zero.
III.3.2.Ecuaţii liniare omogene
Soluţiile ecuaţiei liniare omogene (3) posedă următoarele
proprietăti:
1. dacă 1 şi 2 sunt soluţii ale ecuaţieiliniare omogene,
atunci 21 sunt de asemenea soluţii ale aceleiaşi
ecuaţii;
2. dacă este o soluţie a ecuaţiei liniare omogene şi
R atunci este o soluţie a aceleiaşi ecuaţii.
După cum se ştie, fiecare spaţiu liniar finit dimensional posedă cel
puţin o bază, adică un sistem maximal de elemente liniar
independente în acest spaţiu.Astfel, ajungem la necesitatea
studierii noţiunii de dependenţă liniară a vector-funcţiilor.
Vector-funcţiile n
m RI :,.....,1 se numesc liniar-dependente
pe I, dacă există m constante reale mcc ,....,1 ,cel puţin una fiind
diferită de zero,astfel încît are loc identitatea
0..., 11 tctc mm ,It
In caz contrar ele se numesc liniar independente pe I.
Determinantul lui Wronski (wronskianul) a sistemului de n
vector-funcţii

95
It
t
t
t
t
nn
n
n
n
,.......,......,.......
1
1
11
1
se numeşte W, definit prin
tt
tt
tW
nnn
n
...
.........
...
1
111
.
Din punct de vedere geometric,valoarea wronskianului în punctul
0t reprezintă volumul generalizat al paralelipipedului, construit pe
vectorii 001 ,...., tt n .
Teorema 3.Soluţiile n ,.....,1 ale ecuaţiei liniare omogene (3)
sunt liniar independente
pe I atunci şi numai atunci, cînd wronskianul lor se anulează cel
puţin într-un punct.
Exemplu.3.1. Fie date m vector-funcţii n
m RI :,....,1 , nm de clasă 1c . Demonstraţi, că acest
sistem de funcţii poate fi completat pînă la un sistem fundamental
de soluţii al unei ecuaţii liniare omogene (3) atunci şi numai
atunci, cînd pentru orice It rangul matricei de dimensiune
mn ,coloanele căreia sînt formate din vector-funcţiile
m ,,.........1 , este maximal (egal cu m) pe I.
Din cele mai sus urmează, că dacă n
n RI :,....,1 formează
un sistem fundamental de soluţii al ecuaţiei liniare omogene (3),
atunci pentru orice soluţie x al acestei ecuaţii există în mod univoc
n constante Rcc n ,...,1 astfel încît
tctcx nn ....11 It (4)
(descompunerea funcţiei x în baza n ,...,1 ).
Egalitea (4) cu constantele arbitrare ncc ,...,1 reprezintă soluţia
generală a ecuaţiei (3). Ea are forma

96
....
...
.........
...
...
.........
... 1
1
111
11
1111
nnnn
n
nnnn
nn
c
c
tt
tt
tctc
tctc
x
sau
tUx c (5)
tt
tt
tU
nnn
n
...
.........
...
1
111
, ....
1
nc
c
c
Observăm că coloanele matricei tU reprezintă vectorii
sistemului fundamental de soluţii. Această matrice se numeşte
matrice fundamentală a ecuaţiei liniare omogene (3). Ea posedă
proprietăţile:
1. det IttWtU 0 , prin urmare, există matricea
inversă tU 1, pentru orice It ;
2. egalitatea (5) reprezintă soluţia generală a ecuaţiei (3);
3. matricea tU verifică ecuaţia matriceală tAtU
tU It (6)
4. dacă tVtU , sunt două matrici fundamentale, atunci
există o matrice constantă nedegenerată H astfel încît are
loc egalitatea tVtU H It (7)
5. egalitatea (7) cu matricea constantă arbitrară H reprezintă
soluţia generală a ecuaţiei matriceale (6).
Exemplu 3.2. Să se demonstreze, că dacă matricea tU este o
soluţie a ecuaţiei matriceale (6) şi pentru un It 0 matricea
0tU este nedegenerată, atunci tU este o matrice fundamentală
a ecuaţiei liniare omogene (3).
Cu ajutorul matricei fundamentale tU putem exprima soluţia
problemei Cauchy
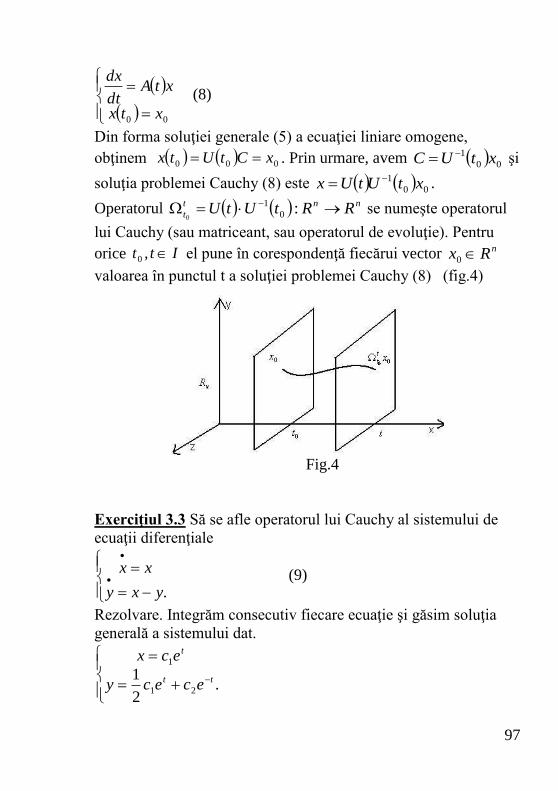
97
00 xtx
xtAdt
dx
(8)
Din forma soluţiei generale (5) a ecuaţiei liniare omogene,
obţinem 000 xCtUtx . Prin urmare, avem 00
1 xtUC şi
soluţia problemei Cauchy (8) este 00
1 xtUtUx .
Operatorul nnt
t RRtUtU :0
1
0 se numeşte operatorul
lui Cauchy (sau matriceant, sau operatorul de evoluţie). Pentru
orice Itt ,0 el pune în corespondenţă fiecărui vector nRx 0
valoarea în punctul t a soluţiei problemei Cauchy (8) (fig.4)
Fig.4
Exerciţiul 3.3 Să se afle operatorul lui Cauchy al sistemului de
ecuaţii diferenţiale
.yxy
xx (9)
Rezolvare. Integrăm consecutiv fiecare ecuaţie şi găsim soluţia
generală a sistemului dat.
.2
121
1
tt
t
ececy
ecx
98
Soluţia sistemului (9), care verifică condiţiile iniţiale
0000 , ytyxtx este
.2
1
,
00
0
000
0
yexeey
xex
tttttt
tt
Ultemele relaţii determină operatorul lui Cauchy
,,,, 0000yxyxt
t
t
t a cărui matrice este
tttttt
tt
eee
e
000
0
2
10
.
Teorema 4. Wronskianul W al oricărui sistem fundamental de
soluţii al ecuaţiei liniare omogene (3) verifică ecuaţia
tTrAdt
dW .W
Exemplu 3.4 Demonstraţi formula lui Liouville pentru
wronskianul W(t) al unui sistem de n soluţii ale ecuaţiei liniare
omogene (3).
.exp
0
0
t
t
dttTrAtWtW (11)
Din formula lui Leuville (11) urmează că pentru operatorul
Cauchy t
t0 , avem
.expdet
0
0
t
t
t
t dttTrA
După cum se ştie, determinantul operatorului liniar din nR în nR
(determinantul matricei operatorului) exprimă coeficientul de
dilatare al volumului oricărui paralelipiped în rezultatul acţiunii
acestui operator. Astfel, dacă Tr 0tA It , atunci
operatorul lui Cauchy al ecuaţiei (3) păstrează volumul.
III.3.3. Sisteme liniare omogene. Soluţiile ecuaţiei liniare omogene (2) posedă următoarele
proprietăţi:
99
1. dacă 1 şi 2 sunt soluţiile ecuaţiei liniare omogene (2),
atunci 21 este o soluţie a ecuaţiei liniare omogene
asociate (3);
2. dacă şi sunt soluţii ale ecuaţiei liniare omogene (2) şi
respectiv ecuaţiei liniare asociate (3), atunci este o
soluţie a ecuaţiei liniare omogene (2).
3. Teorema fundamentală pentru ecuaţia liniară
omogenă. Mulţimea nx a soluţiilor ecuaţiei liniare
omogene (2) este egală cu suma mulţimii 0x a soluţiilor
ecuaţiei liniare omogene (3) şi a unei soluţii particulare
a ecuaţiei liniare omogene (2)
0xxn
Problema 3.5 Demonstraţi teorema fundamentală.
O metodă de integrare a ecuaţiei liniare neomogene este
metoda lui Lagrange (metoda “variaţieiconstantelor”). Ea
constă în următoarele:
1. Fie cunoscută soluţia generală a ecuaţiei liniare
omogene (3) de forma CtUx , unde U(t) este o
matrice fundamentală a ecuaţiei (3), nRC este un
vector constant arbitrar.
2. Căutăm soluţia particulară a ecuaţiei liniare
neomogene (2) de forma tUtx tC , (13)
unde C(t) este un vector-funcţie necunoscută („variem
constantele ”). Prin înlocuire în ecuaţia (2) obţinem
tftCtUtAtCtUtCtU
.
În virtutea formulei (6) avem
tftCtU
(14)
sau
tftUtC 1
(15)
De aici găsim

100
.
0
1 cdfUtC
t
t
pentru c=0 obţinem ecuaţia particulară
.0
1 dfUtUtx
t
t
comform (12) soluţia generală a ecuaţiei liniare neomogene
(2) are forma
.0
1
t
t
dfUtUCtUx
sau
,0
dfCtUx
t
t
t
unde t
este operatorul lui Cauchy al ecuaţiei liniare
omogene (3).
Observaţie. Din cele expuse mai sus urmează, că substituţia
(13) reduce ecuaţia liniară neomogenă (2) în coordonate (t,x)
la o ecuaţie liniară neomogenă elementară (15) în
coordonatele (t,0).
Exemplul 3.6. Să se integreze sistemul de ecuaţii diferenţiale
22
,
txdt
dy
ydt
dx
. (16)
Rezolvare. Să integrăm sistemul liniar omogen asociat
,
,
xdt
dy
ydt
dx
(17)

101
din care urmează xdt
xd
2
2
cu soluţia generală
tt ececx 21 . Din (17) rezultă, că tt ececdt
dxy 21
.
Astfel soluţia generală a sistemului (17) este
.2
1
c
c
ee
ee
y
xtt
tt
Să căutăm soluţia particulară a sistemului liniar neomogen
(16) de forma
.2
1
tc
tc
ee
ee
y
xtt
tt
În acest caz ecuaţia (14) va căpăta forma
.
2
02
2
1
ttc
tc
ee
eett
tt
De aici găsim 2
1 22
1tec t
şi .22
1 2
2
tec t
Deci 1
2
12
1cttetc t
şi .
2
1 2
2
ttetc t
Astfel, obţinem soluţia particulară a sistemului (16)
t
t
y
x
2
2
şi soluţia lui generală
.221
2
21
tececy
tececxtt
tt
III.4.SISTEME LINIARE DE ECUAŢII DIFERENŢIALE
CU COEFICIENŢI CONSTANŢI.
III.4.1.Sisteme liniare omogene.
Considerăm sistemul liniar omogen de ecuaţii diferenţiale

102
.,.......1,,1
n
j
ijjij
i niRaxadt
dx
Fie njiijaA
1, , matricea coeficienţilor sistemului dat. Atunci
acest sistem poate fi scris sub forma unei ecuaţii vectoriale
Axdt
dx . (1)
Vom studia mai jos ecuaţia diferenţială omogenă (1). În virtutea
celor expuse în paragraful 3, ecuaţia (1) posedă sisteme
fundamentale de soluţii.
După cum se ştie, vectorul nenul h se numeşte vector propriu al
matricei A,dacă există un număr astfel încît hAh . Numărul
se numeşte valoare proprie a valoarei A. Valorile proprii ale
matricei A se găsesc din ecuaţia caracteristică 0det EA cu
E, matricea unitate. La rîndul său,vectorul propriu h,
corespunzător valorii proprii se găseşte din ecuaţia
0 EA cu 0 vectorul nul.
Teorema 1. Fie nRhR , . Vector-funcţia hex t verifică
ecuaţia liniară omogenă (1) atunci şi numai atunci, cînd este o
valoare proprie a matricei A, iar h este un vector propriu al ei,
corespunzător valorii .
Exemplu 4.1 Să se integreze sistemul
.
2
4
yxy
yxx
Rezolvare. Să gasim valorile proprii ale matricei
12
14A . Ecuaţia caracteristică
06512
142
EA , are rădăcinile 21 şi
32 . Găsim vectorul propriu, corespunzător valorii proprii
21 , din relaţia
103
.02
02
0
0
12
12011
hEA
Vom lua
1
11h . În mod analog se află vectorul propriu
1
12h ,corespunzător valorii proprii 33 . În virtutea
teoremei 1 vector-funcţiile
2
12
1
te şi
1
13
2
te sunt
soluţii ale sistemului considerat. Ele formează un sistem
fundamental de soluţii. Prin urmare, soluţia generală este
212
211
2
2
xxx
xxx sau
tt
tt
ececy
ececx3
2
2
1
3
2
2
1
2
Teorema 2. Dacă mhh ,....1 sunt vectorii proprii ai matricei A,
corespunzători valorilor proprii distincte m ,...1 ji , atunci
aceşti vectori sunt liniar independenţi (asupra cîmpului R şi asupra
cîmpului numerelor complexe C).
Teorema 3. Dacă mhh ,....1 sunt vectorii proprii ai matricei A,
corespunzător valorilor proprii distincte m ,...1 ji , atunci
vector-funcţiile m
t
m
thehe m ,....,11
1 sunt liniar
independente pe R (asupra cîmpului R şi asupra cîmpului C).
Teorema 4. Dacă toate valorile proprii n ,....,1 ale matricei A
sunt reale şi distincte j 1 iar nhh ,....1 sunt vectorii proprii
respectivi, atunci soluţia generală a ecuaţiei (1) este
n
t
n
thechecx n
....111 . (2)
Cele expuse mai sus reduc problema integrării ecuaţiei (1) la
problema găsirii rădăcinilor polinomului caracteristic EA det .
Însă nu orice matrice cu elemente complexe posedă cel puţin un
vector propriu complex.
104
Observaţie. În teoremele 2 şi 3 valorile şi vectorii proprii pot fi
consideraţi şi complecşi. În acest caz în condiţiile teoremei 3
vector-funcţiile mm IMREIMRE ,,...,, 11 sunt şi ele liniar
independente pe R (asupra cîmpului R).
După cum se ştie, derivata funcţiei complexe
tivtuzCRz ,: zvzu Im,Re ,se defineşte cu
ajutorul formulei
viuz .
Teorema 5. Dacă vector-funcţia complexă tivtuu verifică
ecuaţia (1), atunci funcţiile zvzu Im,Re sunt soluţiia ale
ecuaţiei (1).
Exemplu 4.2. Să se integreze ecuaţia (1) cu matricea
12
51A .
Rezolvare.
Rădăcinile ecuaţiei caracteristice 92 EA sunt
i32,1 . Valorile proprii i3 îi corespunde vectorul propriu
i31
1. Funcţia complexă
iehe itt
31
53
11 . În virtutea
teoremei 5 şi observaţiei, ce o procedează, generează 2 soluţii
reale liniar independente
tt
t
3cos3sin3
3cos5 şi
tt
t
3cos33sin
3sin5.
Menţionăm că pentru valoarea proprie i32 obţinem aceleaşi
2 soluţii reale (cu exactitate de un factor constant). Prin urmare,
sistemul considerat are soluţia generală
tcctccy
tctcx
3cos33sin3
3sin53cos5
2121
21
Considerăm cazul, cînd matricea A are valori proprii multiple.

105
Teorema 6. Pentru orice matrice complexă A există o matrice
nedegenerată S, astfel încît are loc relaţia S A JS 1 cu
matricea Jordan de forma
mJ
J
J
J
......0
............
0...0
0...0
2
1
(3)
Unde miJ i ,...,1 sunt blocuri Jordan de înălţime ik pe
diagonala principală a cărora se află cîte o valoare proprie i a
matricei A, adică
i
i
i
i
iJ
0...0
1...0
...
0...10
0...01
.
Matricea J se numeşte forma normală Jordan a matricei A. Unei
valori proprii a matricei A îi corespunde cîteva blocuri Jordan,
suma înălţimilor cărora este egală cu multiplicitatea valorii ca
rădăcină a polinomului caracteristic EA . În particular, dacă
toate valorile proprii ale matricei A sunt reale şi distincte, atunci
matricea Jordan respectivă este diagonală, avînd doar blocuri
Jordan de înălţimea 1.
Vom considera cîteva cazuri:a) matricea A este un bloc Jordan;b)
matricea A este o matrice Jordan;c) matricea A este o matrice de
formă generală.
a) Considerăm o ecuaţie de forma
Jydt
dy (4)
Cu nRy şi blocul Jordan

106
0...0
1...0
...
0...10
0...01
J (5)
Menţionăm că versorii
1,0,...,0,...,0,...,0,1,0,0,...,0,1 21 neee verifică
următoarele relaţii
.,...,, 112211 nnn eeJeeeJeeJe (6)
În acest caz vom spune că vectorii neee ,...,, 21 formează o serie de
lungime n, în care 1e este vector propriu al matricei J, iar ceilalţi
se numesc vectori asociaţi vectorului propriu 1e .
Ecuaţia (4) se reduce la sistemul de ecuaţii
nn
nnn
yy
yyy
yyy
yyy
11
322
211
... (7)
Fără mari greutăţi, se poate de verificat, că vector-funcţiile
t
t
tn
n
t
t
t
t
tt
e
te
en
t
e
te
et
e
tee
...
!1
,....,
0
...
0
!2
,
0
...
...
0,
0
...
0
0
0
12
321 .
sunt soluţii liniar independente ale sistemului (7). Într-adevăr,
integrăm sistemul (7) consecutiv de jos în sus: din ultima ecuaţie

107
putem lua t
n ey , din penultima t
n tey 1,etc.(astfel obţinem
n ), sau putem lua 0ny şi sistemul (7) se reduce la un sistem
de aceeaşi formă, însă de n-1 ecuaţii şi repetăm raţionamentele de
mai sus (astfel obţinem 121 .,........, n ).
Copiem aceste soluţii sub forma
nn
nnt
n
ttt
eet
en
te
n
te
eet
et
eeet
eee
12
2
1
1
32
12
321211
!1...
!2!1
,!1!2
,!1
,
Prin urmare, soluţia generală a ecuaţiei (4)are forma
nncccy ...2211 .
b) fie că matricea A este o matrice Jordan de tipul (3).
Dinteorema (6) urmează că în acest caz numărul blocurilor
Jordan ale matricei A=J este egal cu numărul maximal de vectori
proprii liniari independenţi ai ei. Afară de aceasta, fiecărui bloc
Jordan îi corespunde o serie de vectori ini
i ee ,...,1 cu vectorul
propriu ie1 şi ceilalţi vectori asociaţi lui(lungimea seriei este
egală cu înălţimea in ) a blocului Jordan respectiv.
Teorema 7. Vector-funcţiile de forma (8) scrise pentru toate
blocurile Jordan ale matricei A, formează un sistem fundamental
de soluţii al ecuaţiei (1).
Teorema 8. Dacă matricea A are o valoare proprie de
multiplicitatea k, atunci ecuaţia (1) posedă k soluţii liniar
independente de forma
kk
kkt
n
ttt
hht
hk
th
k
te
hht
ht
ehht
ehe
12
2
1
1
321
2
321211
!1...
!2!1
,!1!2
,!1
,
(10)
108
formate în baza seriilor de vectori, care corespund acestei valori
proprii (k este lungimea seriei respective).
Remarca mnenotehnică. Regula pentru memorarea formulelor
(10) constă în următoarele: fiacare soluţie reprezintă un produs
dintre te şi un vector-funcţie, care pentru prima soluţie coincide
cu vectorul propriu respectiv, iar pentru celelalte poate fi obţinută
din cea precedentă în rezultatul integrării în raport cu t şi în
calitate de constantă de integrare se ia următorul vector asociat.
Observaţie. Dacă numărul maximal de vectori proprii liniar
independenţi, corespunzători unei valori proprii, este egal cu
multiplicitatea k a acestei valori, atunci ei îi corespund k serii de
vectori de lungime 1, formate doar din vectorii proprii liniar
independenţi.
În caz, dacă numărul de vectori proprii este mai mare decît
multiplicitatea valorii proprii respective, şi mai ales în cazul cînd
acest număr este mai mare decît 1, problema găsirii seriilor de
vectori, lungimii lor, vectorilor proprii, care generează aceste
serii, este o problemă mai dificilă.
În tot cazul noi putem găsi seriile de vectori din formulele (9), pe
care le copiem sub forma
.,....,,0 1121 nn hhEAhhEAhEA (11)
Exemplul 4.3. Să se integreze sistemul
xyy
yx
2
.
Rezolvare. Ecuaţia caracteristică 0122 EA are
rădăcina 1 de multiplicitatea 2. Rangul matricei EA este
egal cu 1, deci matricea A are un vector propriu. Astfel valorii
1 îi corespunde o serie dintr-un vector 1h şi altul asociat 2h .
În calitate de vector asociat luăm
0
12h . Atunci în virtutea
formulelor (11)
1
1, 21 hEAh . Vectorii 1h şi 2h

109
formează serie căutată. Comform teoremei 8 sistemul considerat
are soluţia generală
12
2122
21
2
21
2
1ctc
cctcehthechec
y
xttt
În unele cazuri, putem folosi următoarele considerente la
integrarea ecuaţiei (1).
Notăm cu ig vectorul, componentele căruia sunt
complementele algebrice ale elementelor din prima i a matricei
EA , se consideră parametru.
Exemplul 4.4. Să se integreze sistemul
zyxz
zyxy
zyxx
938
66
524
.
Rezolvare. Ecuaţia caracteristică 0 EA are rădăcinile 2 ,
132 . Găsim vectorul 1g ,componentele căruia sunt
complementele algebrice ale elementelor din prima linie a
matricei
.
938
616
524
EA
108
66
982
1
x
g ,
8
6
82'
1
g .

110
Vectorul
6
6
3
21g este vectorul propriu al matricei A,
corespunzător valorii proprii 2 . Vectorii
2
0
2
11g şi
4
3
3
12
1 '
1g formează o serie, corespunzătoare valorii proprii
1 .
În virtutea teoremei 8 sistemul considerat are soluţia generală
.
6
0
6
2
0
2
2
0
2
6
6
3
32
2
1
tececec
z
y
xttt
sau
tt
tt
tt
ecctcecz
ececy
ecctcecx
323
2
1
3
2
1
323
2
1
42
32
3
.
Observaţie. În virtutea teoremei 8 soluţia generală a ecuaţiei (1)
poate fi scrisă sub forma
,...21 tRetQetPexttt m
unde P,Q,...,R sunt vector-
polinoame de un grad mai mic cel puţin cu o unitate decît
multiplicitatea valorii proprii respective (aceste vector-
polinoame sunt cu un grad mai mic cu o unitate decît înălţimea
blocului Jordan de dimensiune maximală, corespunzător valorii
proprii respective). Astfel, termenii soluţiei generale, care
corespund valorii proprii multiple i , pot fi găsiţi cu ajutorul
metodei coeficienţilor nedeterminaţi.
III.4.2.Exponenta matricei.

111
Fie A o matrice pătrată constantă. Exponenta acestei matrice este
o matrice, care se definaşte prin
â ...!
...!2!1
exp2
n
AAAEA
n
cu E-matricea unitate.
Teorema 9. Soluţia ecuaţiei (1), care verifică condiţia iniţială
00 xtx este 00exp xAttx .
Observaţie. Matricea exp(tA) este o soluţie a ecuaţiei
matriceale AXdt
dx , care verifică condiţia iniţială EX 0 . De
aici rezultă că exp(tA) este o matrice fundamentală a ecuaţiei (1) ,
coloanele căreia în punctul 0t sunt versorii respectivi. Aceste
raţionamente pot fi puse la baza găsirii exponentei matricei.
Exemplul 4.5. Să se afle exponenta matricei
12
14A .
Rezolvare. Din exemplul 4.2 urmează că soluţia generală a
ecuaţiei respective (1) cu matricei dată A este
tt
tt
ececy
ececx3
2
2
1
3
2
2
1
2.
Găsim soluţiile particulare, care verifică condiţiile iniţiale
,00,10 yx şi 10,00 yx (versorii spaţiului 2R ).
Aceste soluţii sunt
tt
tt
ee
ee
y
x32
32
22
2 şi respectiv
tt
tt
ee
ee
y
x32
32
2.
Din cele expuse mai sus rezultă, că matricea fundamentală,
formată din aceste soluţii, coincide cu matricea exp(tA), adică
tttt
tttt
eeee
eeeetA
3232
3232
222
2exp ,
deci,
3232
2323
222
2exp
eeee
eeeeA .

112
Cololar. Fluxul fazic al ecuaţiei (1) pe un interval de timp de
durată t dilată volumele în spaţiu fazic de TrAt exp ori şi, în
particular,păstrează volumele dacă Tr A=0.
III.4.3. Sisteme liniare neomogene. După cum se ştie, metoda generală de integrare a ecuaţiei liniare
neomogene
tfAxdt
dx (12)
constă în integrarea ecuaţiei liniare omogene asociate (1) şi
determinarea unei soluţii particulare a ecuaţiei liniare neomogene
(12).
Teorema 10. 1) Dacă nu este o valoare proprie am matricei A,
atunci ecuaţia (13) posedă o soluţie particulară de forma
neomogenităţii, adică de forma ,tQe r
t unde tQr este un
vector-polinom de un grad ksr .
Observaţie. În cazul rezonant gradul polinomului Q este egal cu
ms , unde m este înălţimea blocului Jordan de dimensiune
maximală,corespunzător valorii proprii . Polinomul Q poate fi
găsit cu ajutorul metoddei coeficienţilor nederminanţi.
Exemplul 4.6. Să se integreze sistemul
1
1
31
112
te
y
x
y
x t (14)
Rezolvare. Matricea
31
11A are valorile proprii
221 . Soluţia liniară a sistemului liniar omogen asociat este
0
1
1
1
1
12
2
2
1 tececy
xtt
.
În virtutea teoremei (10) vom căuta soluţia generală a sistemului
(14) sub forma
.23
23
2
3
2
lhtgtft
dctbtatetQe
y
xtt

113
Înlocuim această vector-funcţie în sistemul (14) şi găsim
coeficienţii a,b,c,d,f,g,h,l.
Obţine soluţia particulară a sistemului (14)
3
23
2
6
1
12
1
6
1
t
tte
y
xt
.
Soluţia generală a sistemului dat este
3
12
23
2122
6
1
12
1
6
1
tctc
ttcctce
y
xt
.
Teorema 11. Fie date o matrice a cu elementele reale şi o vector-
funcţie complexă F de variabilă reală. Dacă funcţia complexă z
verifică ecuaţia
tFAzdt
dz , atunci zu Re şi zv Im sunt două soluţii ale
ecuaţiilor tFAudt
duRe
şi respectiv
tFAvdt
duIm .
III.4.4.Sisteme recurente.
Fie dat un sistem autonom pe nR , toate soluţiile căruia sunt
prelungibile pe R. Dupa cum se ţtie, un astfel de sistem defineşte
un flux fazic nn
t RRg : ,adică un grup monoparametric
continuu pe nR . Acest flux descrie evoluţia spaţiului fazic în tmp.
Dacă considerămstarea spaţiului nR în momente discrete de timp
...,,....,2,1,0 i atunci obţinem un grup discret nn
i RRg :
Zi , numit cascadă (un analog discret al sistemului dinamic).
În cazul ecuaţiei liniare omogene (1) cascada respectivă este
determinată de difeomorfizmele ii
ig 1
00 .
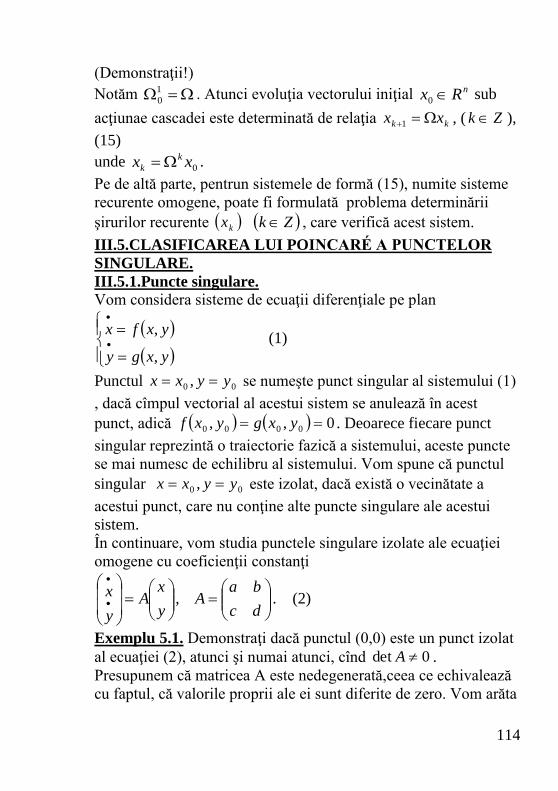
114
(Demonstraţii!)
Notăm 1
0. Atunci evoluţia vectorului iniţial nRx 0
sub
acţiunae cascadei este determinată de relaţia kk xx 1 , ( Zk ),
(15)
unde 0xx k
k .
Pe de altă parte, pentrun sistemele de formă (15), numite sisteme
recurente omogene, poate fi formulată problema determinării
şirurilor recurente kx Zk , care verifică acest sistem.
III.5.CLASIFICAREA LUI POINCARÉ A PUNCTELOR
SINGULARE.
III.5.1.Puncte singulare.
Vom considera sisteme de ecuaţii diferenţiale pe plan
yxgy
yxfx
,
, (1)
Punctul 00 , yyxx se numeşte punct singular al sistemului (1)
, dacă cîmpul vectorial al acestui sistem se anulează în acest
punct, adică 0,, 0000 yxgyxf . Deoarece fiecare punct
singular reprezintă o traiectorie fazică a sistemului, aceste puncte
se mai numesc de echilibru al sistemului. Vom spune că punctul
singular 00 , yyxx este izolat, dacă există o vecinătate a
acestui punct, care nu conţine alte puncte singulare ale acestui
sistem.
În continuare, vom studia punctele singulare izolate ale ecuaţiei
omogene cu coeficienţii constanţi
y
xA
y
x ,
dc
baA . (2)
Exemplu 5.1. Demonstraţi dacă punctul (0,0) este un punct izolat
al ecuaţiei (2), atunci şi numai atunci, cînd 0det A .
Presupunem că matricea A este nedegenerată,ceea ce echivalează
cu faptul, că valorile proprii ale ei sunt diferite de zero. Vom arăta
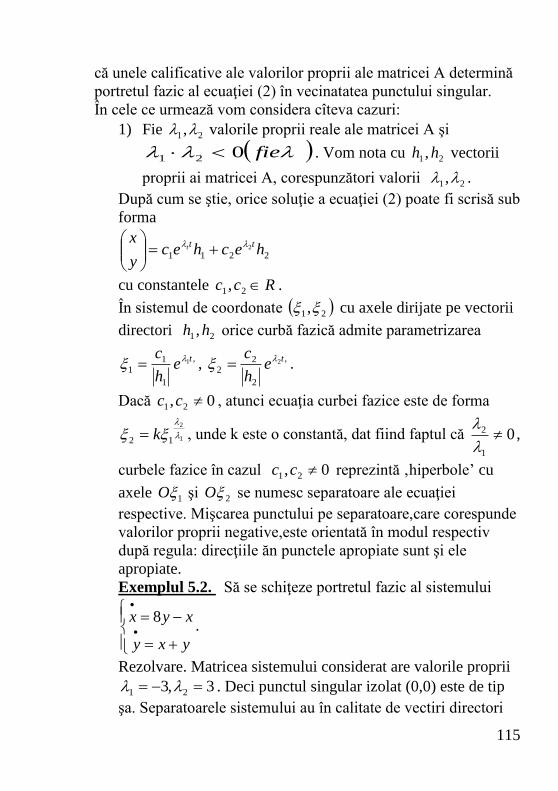
115
că unele calificative ale valorilor proprii ale matricei A determină
portretul fazic al ecuaţiei (2) în vecinatatea punctului singular.
În cele ce urmează vom considera cîteva cazuri:
1) Fie 21 , valorile proprii reale ale matricei A şi
fie021 . Vom nota cu 21 ,hh vectorii
proprii ai matricei A, corespunzători valorii 21 , .
După cum se ştie, orice soluţie a ecuaţiei (2) poate fi scrisă sub
forma
22112 hechec
y
xttt
cu constantele Rcc 21 , .
În sistemul de coordonate 21 , cu axele dirijate pe vectorii
directori 21 ,hh orice curbă fazică admite parametrizarea
,
1
11
1teh
c , ,
2
22
2teh
c .
Dacă 0, 21 cc , atunci ecuaţia curbei fazice este de forma
1
2
12
k , unde k este o constantă, dat fiind faptul că 01
2
,
curbele fazice în cazul 0, 21 cc reprezintă ‚hiperbole’ cu
axele 1O şi 2O se numesc separatoare ale ecuaţiei
respective. Mişcarea punctului pe separatoare,care corespunde
valorilor proprii negative,este orientată în modul respectiv
după regula: direcţiile ăn punctele apropiate sunt şi ele
apropiate.
Exemplul 5.2. Să se schiţeze portretul fazic al sistemului
yxy
xyx 8.
Rezolvare. Matricea sistemului considerat are valorile proprii
3,3 21 . Deci punctul singular izolat (0,0) este de tip
şa. Separatoarele sistemului au în calitate de vectiri directori

116
vectorii proprii
1
41h , (pentru 31 ) şi
1
22h ,(pentru 32 ). Mişcarea pe o separatoare 31
este orientată spre origine, iar pe alta- de la origine (fig.5)
Fig.5
Fie 21 , valori proprii reale distincte de acelaşi semn 021
ale matricei A.
Exemplul 5.3. Să se schiţeze portretul fazic al sistemului
xyy
yxx
24
.
Rezolvare. Valorile proprii ale matricei acestui sistem sunt
3,2 21 . Prin urmare, punctul singular este de tip nod
instabil. Separatoarele au în calitate de valori directori vaetorii
proprii
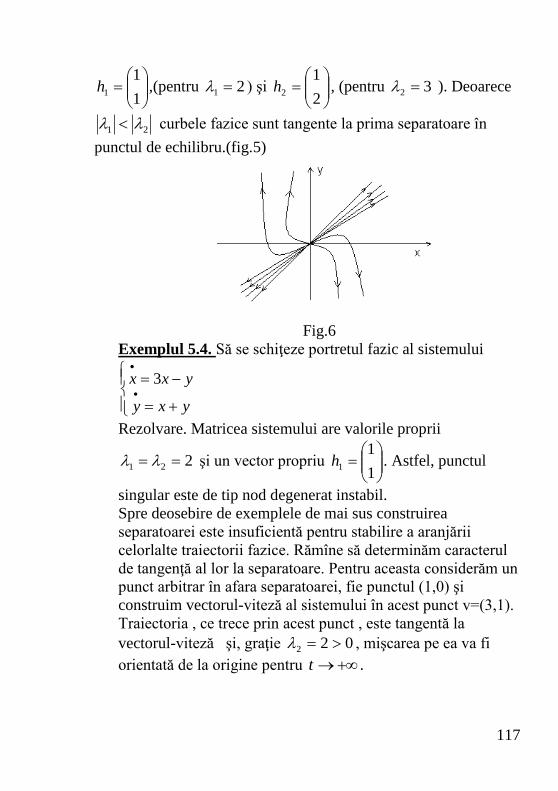
117
1
11h ,(pentru 21 ) şi
2
12h , (pentru 32 ). Deoarece
21 curbele fazice sunt tangente la prima separatoare în
punctul de echilibru.(fig.5)
Fig.6
Exemplul 5.4. Să se schiţeze portretul fazic al sistemului
yxy
yxx 3
Rezolvare. Matricea sistemului are valorile proprii
221 şi un vector propriu
1
11h . Astfel, punctul
singular este de tip nod degenerat instabil.
Spre deosebire de exemplele de mai sus construirea
separatoarei este insuficientă pentru stabilire a aranjării
celorlalte traiectorii fazice. Rămîne să determinăm caracterul
de tangenţă al lor la separatoare. Pentru aceasta considerăm un
punct arbitrar în afara separatoarei, fie punctul (1,0) şi
construim vectorul-viteză al sistemului în acest punct v=(3,1).
Traiectoria , ce trece prin acest punct , este tangentă la
vectorul-viteză şi, graţie 022 , mişcarea pe ea va fi
orientată de la origine pentru t .
118
Fig.8
Exemplul 5.5. Să se schiţeze portretul fazic al sistemului
xyy
yx
52
2
Rezolvare. Valorile proprii ale matricei sistemului sunt complexe
i312,1 . Deci, punctul singular este de tip focar instabil
01Re . Rămîne să determinăm cum sunt înfăşurate
spiralele pe punctul singular.
Ca şi în cazul punctului singular de tip nod degenerat considerăm
un punct arbitrar , cu excepţia originii, fie punctul –(1;0), în care
construim vectorul-viteză al sistemului v=(0;-5). Traiectoria-
spirală, ce trece prin acest punct, este tangentă la vectorul-viteză,
iar micşorarea pe ea este orientată de la origine pentru t .
Cele expuse mai sus permit construirea traiectorilor fazice ale
sistemului dat (fig 9).

119
Fig.9
Exemplul 5.6. Să se schiţeze portretul fazic al sistemului
yxy
yxx 5 (4)
Matricea sistemului de valori proprii i22,1 . Deci, punctul
singular este de tip centru şi traiectoriile lui sunt elipse. Pentru a
găsi axele elipselor alcătuim ecuaţia de forma
04
05
22
yxyx
yxyyxx
Am obţinut ecuaţia a două drepte, coeficienţii unghiulari 21 ,kk ai
cărora se determină cu ajutorul substituţiei kxy .
Astfel avem
014
04
2
2222
kk
xkkxx
Prin urmare, 52,52 21 kk sunt coeficienţii
unghiulari ai axelor elipselor.
Pentru a găsi axa mare şi cea mică considerăm pentru kxy
expresia
22
,
41 kkxy
xA
y
x
, (5)
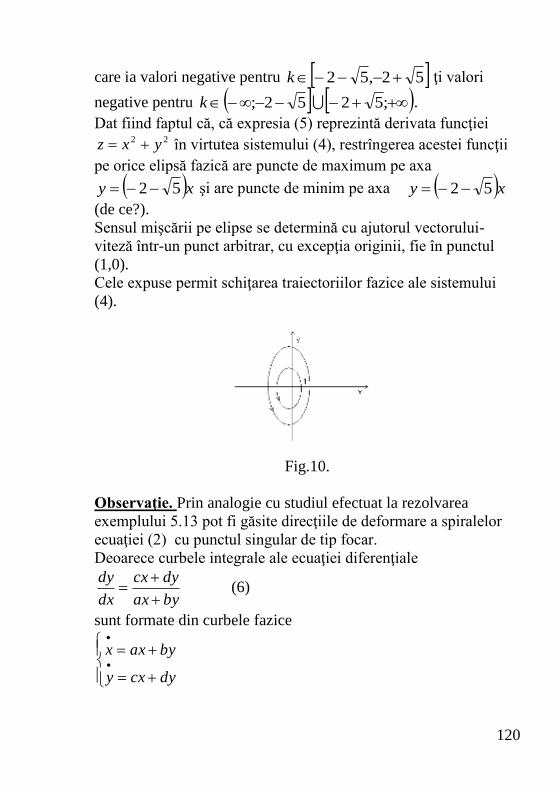
120
care ia valori negative pentru 52,52 k ţi valori
negative pentru ;5252; k .
Dat fiind faptul că, că expresia (5) reprezintă derivata funcţiei 22 yxz în virtutea sistemului (4), restrîngerea acestei funcţii
pe orice elipsă fazică are puncte de maximum pe axa
xy 52 şi are puncte de minim pe axa xy 52
(de ce?).
Sensul mişcării pe elipse se determină cu ajutorul vectorului-
viteză într-un punct arbitrar, cu excepţia originii, fie în punctul
(1,0).
Cele expuse permit schiţarea traiectoriilor fazice ale sistemului
(4).
Fig.10.
Observaţie. Prin analogie cu studiul efectuat la rezolvarea
exemplului 5.13 pot fi găsite direcţiile de deformare a spiralelor
ecuaţiei (2) cu punctul singular de tip focar.
Deoarece curbele integrale ale ecuaţiei diferenţiale
byax
dycx
dx
dy
(6)
sunt formate din curbele fazice
dycxy
byaxx

121
metodele expuse mai sus pot fi utilizate la problema construirii
curbelor integrale ale ecuaţiei (6).
III.5.2. Cicluri limită.
Curba fazică închisă a sistemului (1) se numeşte ciclu-limită, dacă
există o vecinătate a ei, care este complet acoperită cu curbele
fazice, care se aproprie nelimitat cu curba închisă pentru t
şi t . Ciclul-limită s4 numeşte stabil dacă traiectoriile fazice
se apropie de el numai pentru t , instabil pentru t ,
semistabil atunci, cînd unele traiectorii se apropie pentru t ,
iar celelalte respectiv pentru t .
III.6. STABILITATEA DUPĂ LIAPUNOV A SOLUŢIILOR
SISTEMELOR DE ACUAŢII DIFERENŢIALE.
III.6.1. Stabilitatea şi stabilitatea asimptotică după Liapunov.
De exemplu clasic de stabilitate reprezintă pendulul matematic.
Acest pendul posedă două poziţii de echilibru: poziţia verticală de
sus şi cea verticală de jos. Intuitiv este clar că poziţia verticală de
jos este stabilă la (la mici devieri ale pendulului de la poziţia de
echilibru el oscilează cu amplitude mici în jurul acestei poziţii de
echilibru). Pe de altă parte, la cea mai mică deviere de la poziţia
verticală de sus , pendulul se îndepărtează considerabil de la
poziţia iniţială, ceea ce înseamnă că această poziţie este instabilă.
În cele ce urmează, vom studia unele elemente ale teoriei
matematice a stabilităţii, bazele căreia au fost puse pe ilustru
matematician rus A.M.Liapunov.
Se consideră ecuaţia diferenţială autonomă
xfdt
dx (1)
cu funcţia nn RDRDf ,: de clasă 1c .
Fie ,atx o soluţie a ecuaţiei (1), ceea ce implică 0af
şi ax este punct de echilibru al ecuaţiei (1). Vom nota cu
0, xx soluţia ecuaţiei (1), care verifică condiţia iniţială
00,0 xxx . Presupunem, că toate soluţiile 0, xx cu

122
valoarea iniţială 0x dintr-o vecinătate suficient mică a punctului
de echilibru ax sunt prelungirile pe semiaxa ;0 .
Vom spune că poziţia de echilibru ax (soluţia ,atx ) a
ecuaţiei (1) este stabilă după Liapunov, dacă pentru orice 0
există un număr 0 astfel încît pentru orice soluţie
0, xx a ecuaţiei date cu proprietatea ca axx 0,0 are
loc inegalitatea 0, 0 axtx pentru orice 0t .
Exemplul 6.1. Soluţia nulă a sistemului liniar
12
21
xx
xx
este stabilă după Liapunov. Într-adevăr, soluţia acestui sistem cu
condiţia iniţială 21021 ,0,0 xxxxx are forma
2
1
02
01
0cossin
sincos
,
,,
x
x
tt
tt
xtx
xtxxtx .
Fie 0 arbitrar. Vom arăta că numărul verifică
condiţia din definiţia stabilităţii lui Liapunov a soluţiei nule.
Fie 2
2
2
10
xxx . Estimăm soluţia 0, xtx ,
0
2
2
2
1
2
21
2
210 cossinsincos, xxxtxtxtxtxxtx .
Prin urmare, soluţia nulă este stabilă după Liapunov, dar nu şi
asimtotic stabilă.
Exemplu 6.2. Soluţia generală a sistemului liniar
212
211
2
2
xxx
xxx
este asimtotic stabilă. Pentru a demonstra aceasta scriem soluţia
sistemului, care satisface condiţia iniţială 2100 , xxxtx ,
2
12
02
01
0cossin
sincos
,
,,
x
x
tt
tte
xtx
xtxxtx t
.
123
Prin analogie cu exemplul 6.2 arătăm că această soluţie este
stabilă. Mai mult de atît, 0, 0
2
0 xextx t pentru t .
Astfel soluţia nulă este asimtotic stabilă.
Stabilitatea asimtotică a soluţiei nule din exemplul 6.4 este o
urmare a faptului, că pentru valorile proprii ale matricei sistemului
considerat i2 avem 0Re2 . Această implicaţie este
valabilă pentru toate ecuaţiile liniare omogene
Axdt
dx (3)
cu matricea A.
Teorema 1. Soluţia nulă a ecuaţiri liniare omogene (3) este
stabilă după Liapunov atunci ţi numai atunci, cînd 0Re
pentru orice valoare proprie a matricei A şi forma normală a
matricei A nu posedă blocuri Jordon de înălţime mai mare decît 1,
corespunzătoare valorilor proprii cu 0Re .
Teorema 2. Soluţia nulă a ecuaţiei liniare omogene (3) este
asimtotic stabilă atunci şi numai atunci cînd, cînd 0Re
pentru orice valoare proprie a matricei A.
Condiţia 0Re pentru valorile proprii a matricei A implică
stabilitatea asimtotică nu numai a soluţiei nule a ecuaţiei liniare
(3), dar şi a celei cvasiliniare, adică a ecuaţiei de forma
xbAxdt
dx (4)
definite în vecinătatea punctului 0x , cu 00 f şi xb 0
(pentru 0x ).
Orice ecuaţie neliniare (1), definită în vecinătatea punctului 0x
cu DCf 2 şi 00 f , poate fi redusă la forma (4) în felul
următor: devoltăm în serie Taylor vector-funcţia f în vecinătatea
originii de coordinate, şi anume ,xpAxxf f unde
0
x
fx
fA este matricea Jacobi a matricei a aplicaţiei
xfy .
124
În acest caz, trecerea de la ecuaţia (1) la ecuaţia liniară omogenă
xAdt
dxf (5)
se numeşte liniarizare, iar ecuaţia (5) se numeşte aproximaţie
liniară (ecuaţie liniarizată la ecuaţia de primă aproximaţie) a
ecuaţiei liniare (1) în vecinătatea punctului 0x .
Teorema lui Liapunov despre stabilitatea după prima
aproximaţie. Fie dată ecuaţia (1), definită în vecinătatea D a punctului de
echilibru 0x , cu DCf 2 . Deci părţile reale ale tuturor
valorilor proprii ale matricei ecuaţiei de primă aproximaţie (5) a
ecuaţiei neliniare (1) sunt negative, atunci poziţia de echilibru
0x este asimtotic stabilă. Dacă însă cel puţin o valoare proprie
are partea reală pozitivă, atunci poziţia de echilibru 0x este
stabilă după Liapunov.
Afirmaţia inversă nu are loc.
Observaţie. Ecuaţia de primă aproximaţie a ecuaţiei (1) în
vecinătatea punctului de echilibru 0 ax are forma
fAdt
d unde ax , iar
ax
fx
fA
.
Exemplul 6.3. Să se cerceteze la stabilitatea asimtotică soluţia
nulă a sistemului
22
21
sin xxx
xx.
Rezolvare. În virtutea celor expuse mai sus considerăm matricea
11
10
1cos
10
010 xx
fxx
fA .
care are valori proprii i2
3
2
12,1 . Deoarece 0
2
1Re
urmează că soluţia nulă 0x este asimtotic stabilă.

125
Menţionăm că soluţiile de staabilitate după Liapunov şi stabilitate
asimtotică pot fi definite nu numai pentru soluţiile triviale, ci şi
pentru orice soluţie arbitrară a ecuaţiei (1). Pentru aceasta este
suficient să efectuăm substituţia ttxz şi în coordonatele
noi i corespunde soluţia nulă 0z .
III.6.2. Funcţii Liapunov. O metodă efectivă de cercetare la stabilitate a punctelor de
echilibru o constituie metoda funcţiilor Liapunov.
Vom spune că funcţia V este o funcţie pozitiv definită pe o
vecinătate D a punctului ax , dacă 0aV şi 0xV pe D.
Dacă 0aV şi 0aV ( ax ) pe vecinătatea D, atunci vom
spune că V este o funcţie negativ definită pe D.
Funcţia diferenţială V se numeşte funcţie Liapunov pentru ecuaţia
(1) cu 0af , dacă ea este pozitiv definită pe o vecinătate a
punctului de echilibru ax şi derivata ei în virtutea ecuaţiei (1)
pe această vecinatate satisface inegalitatea
n
i
i
i
f xfx
xV
dt
dVxVL
1
0 .
Teorema 4. dacă ecuaţia (1) admite o funcţie Liapunov pe o
vecinătate a punctului de echilibru ax , atunci acest punct de
echilibru este stabil după Liapunov.
Teorema 5. dacă ecuaţia (1) admite o funcţie Liapunov pe o
vecinătate a punctului ax , derivata căreia în virtutea ecuaţiei
este negativ definită pe această vecinătate, atunci punctul de
echilibru ax este asimtotic stabil.
Exemplul 6.4. să se cerceteze la stabilitate poziţia de echilibru a
sistemului
7
5
yxy
yxx
Rezolvare. Observăm, că matricea sistemului liniar respectiv are
valorile

126
i22,1 ,fapt, ce nu garantează stabilitatea soluţiei nule a
sistemului neliniar.
Să arătăm că funcţia pozitivă 22 yxV este o funcţie Liapunov
a sistemului dat. Într-adevăr, derivata ei în virtutea sistemului dat
8675 222 yxyxyyxxxVL f
este o funcţie negativ definită. În virtutea teoremei 5 punctul de
echilibru 0,0 yx este asimtotic stabil.
Notă. Problema determinării existenţei şi construirii funcţiilor
Liapunov este una din problemele fundamentale ale teoriei
calificative ale ecuaţiei diferenţiale.
III.7. Sisteme conservative Se consideră un punct material de masa 1, situat pe axa numerică.
Presupunem, că asupra punctului acţionează o forţă F(x), unde x
este coordonata punctului de bază. În virtutea legii a doua a lui
Newton ( Fma ) avem ecuaţia diferenţială a mişcării
xFx
. (1)
Această ecuaţie, cît şi sistemul echivalent ei
xFy
yx (2)
sunt numite sisteme dinamice conservative (cu un singur grad de
libertate).
Dacă notăm
x
x
xUdssF
0
, atunci sistemul (2) poate fi scris
sub forma
x
Uy
yx.
Exemplul 7.1. considerăm ecuaţia diferenţială a căderii libere a
corpului de masă m comform legii lui Galilei
gxm
,
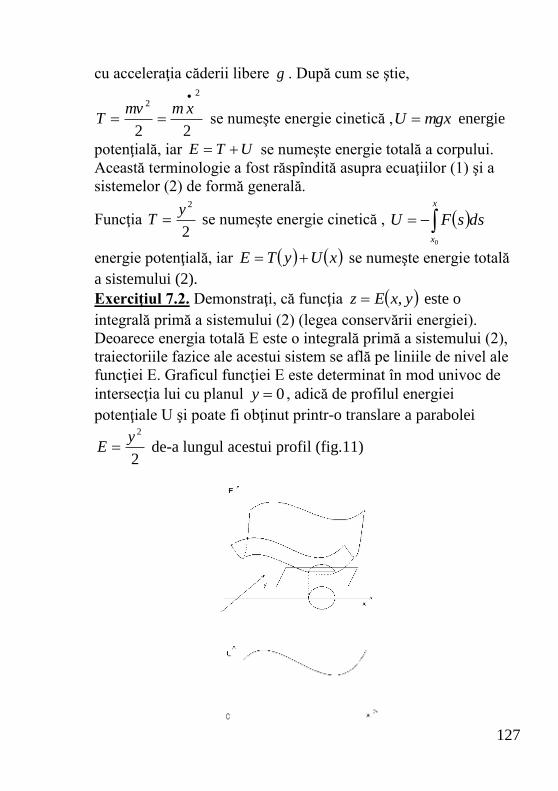
127
cu acceleraţia căderii libere g . După cum se ştie,
22
2
2
xmmv
T se numeşte energie cinetică , mgxU energie
potenţială, iar UTE se numeşte energie totală a corpului.
Această terminologie a fost răspîndită asupra ecuaţiilor (1) şi a
sistemelor (2) de formă generală.
Funcţia 2
2yT se numeşte energie cinetică ,
x
x
dssFU
0
energie potenţială, iar xUyTE se numeşte energie totală
a sistemului (2).
Exerciţiul 7.2. Demonstraţi, că funcţia yxEz , este o
integrală primă a sistemului (2) (legea conservării energiei).
Deoarece energia totală E este o integrală primă a sistemului (2),
traiectoriile fazice ale acestui sistem se află pe liniile de nivel ale
funcţiei E. Graficul funcţiei E este determinat în mod univoc de
intersecţia lui cu planul 0y , adică de profilul energiei
potenţiale U şi poate fi obţinut printr-o translare a parabolei
2
2yE de-a lungul acestui profil (fig.11)
128
Fig.11
III.8. Ecuaţii cu derivate parţiale de ordinul întîi
III.8.1. Noţiuni generale Spre deosebire de paragrafele precedente vom studia în continuare
ecuaţii în raport cu o funcţie de mai multe variabile nxx ,...,1
de forma
0,....,,,....,1
1
n
nx
u
x
uxxF (1)
care se numesc ecuaţii cu derivate parţiale de ordinul întîi.
Exemplul 8.1. (ecuaţia suprafeţei de rotaţie). Orice suprafaţă de
rotaţie poate fi reprezentată printr-o ecuaţie de forma
22 yxfz .
Prin urmare, 22'2 yxfxx
z
şi 22'2 yxfy
y
z
,
de unde avem
0
y
zx
y
zy .
Exemplul 8.2. (ecuaţia unei călătoare). Fia dată funcţia xfy
(profilul iniţial al undei) şi Rc . Funcţia ctxfu reprezintă
profilul în momentul de timp t al undei, care se deplasează cu
viteza c de-a lungul axei OX. Această funcţie verifică ecuaţia
0
x
uc
t
u.
Din exemplele 8.1 şi 8.2 urmează că ecuaţiile obţinute posedă
atîtea soluţii, cîte funcţii diferenţiale de o singură variabilă există.
129
Funcţia derivabilă nRDRDu : se numeşte soluţie a
ecuaţiei (1), dacă ea transformă această ecuaaţie într-o identitate
pe D. Graficul soluţiei se numeşte suprafaţă integrală a ecuaţiei.
În cele ce urmează vom studia unele cazuri perticulare ale ecuaţiei
(1), care se reduc la sisteme de ecuaţii diferenţiale ordinare.
Dacă funcţia necunoscută şi derivatele ei parţiale intervin liniar în
ecuaţie, atunci ecuaţia se numeşte liniară. Dacă însă condiţia de
liniaritate se referă numai la derivatele parţiale ale funcţiei
necunoscute, dar nu şi la ea însăşi, atunci ecuaţia se numeşte
cvasiliniară.
III.8.2. ecuaţii liniare omogene cu derivate parţiale Considerăm ecuaţia liniară omogenă de forma
0....1
1
n
nx
uxf
x
uxf (2)
Transcriem această ecuaţie sub forma
nffffu ,.....,,0, 1 . Observăm, că ecuaţia în această
formă reprezintă tocmai criteriul ca funcţia u să fie o integrală
primă a sistemului de ecuaţii ordinare
xfx
xfx
nn
11 (3)
Aşadar, a integra ecuaţia (2) în seamnă a integra toate integralele
prime ale sistemului (3), numit sistem caracteristic al acestei
ecuaţii, iar traiectoriile fazice ale lui se numesc caracteristice ale
ecuaţiei considerate.
Exemplul 8.3. Să se integreze ecuaţia
0
z
uy
y
uxz
x
uz .
Rezolvare.
Transcriem sistemul caracteristic sub formă simetrică
y
dz
xz
dy
z
dx .
130
Acest sistem are integralele prime funcţional independente 2
2
2
1 36,2 zxyVyxV . Soluţiile ecuaţiei sunt de forma
232 326,2 zxxyyxzu , unde RR 2: este o funcţie
diferenţială arbitrară.
III.8.3. Ecuaţii cvasiliniare cu derivate parţiale. Ecuaţii cvasiliniare cu derivate parţiale de ordinul întîi au forma
uxbx
uuxf
x
uuxf
n
n ,,.....,1
1
(4)
În particular, de forma aceasta sunt ecuţiile liniare neomogene cu
derivate parţiale.
Vom căuta soluţia acesteiu funcţii ca o funcţie implicită din relaţia
0,....,,,,....,, 2121 nn xxxuxxxW
cu funcţia diferenţială W de 1n variabile, ce satisface condiţia
0
u
W.
Avem
u
W
x
W
x
u
i
/
1
.
Înlocuind în ecuaţia (4), obţinem o ecuaţie liniară omogenă în
raport cu funcţia W
0,,....,1
1
u
Wuxb
x
Wuxf
x
Wuxf
n
n (5)
Caracteristicile ecuaţiei liniare omogene (5) se mai numesc şi
caracteristice ale ecuaţiei cvasiliniare (4).
Exemplul 8.4. Să se integreze ecuaţia
x
y
y
zz
x
zy
.
Rezolvare. Ecuaţia (5) în acest caz ia forma
0
z
W
x
y
y
Wz
x
Wy .
avînd sistemul caracteristic

131
y
xdz
z
dy
y
dx .
Funcţiile zxV ln1 şi 2
2 12 yzxV formează un sistem
fundamental de integrale prime. Soluţia ecuaţiei iniţiale se obţine
în formă de funcţie implicită din relaţia
012;ln 2 yzxzxF , unde F este o funcţie diferenţială
arbitrară.
III.8.4. Problema Cauchy. E lesne de arătat, că ecuaţia obţinută din exemplul 8.1 are soluţia
generală 22 yxfz , care reprezintă mulţimea tuturor
suprafeţelor de rotaţie în jurul axei OZ. Pentru a evidenţia o
soluţie particulară, adică o suprafaţă de rotaţie, este suficient să
fixăm o curbă de intersecţie a suprafeţei căutate cu un plan
vertical, ce conţine axa OZ, de exemplu, cu planul 0y . Astfel,
condiţia iniţială în acest caz poate fi scrisă sub forma
xxz 0, cu o funcţie dată . De aici rezultă că xxf 2
şi 0, tttf . Astfel, ecuaţia suprafeţei căutate este
22 yxz .
Sistemul
u
uxbx
uuxf
x
uuxf
n
n ,,...,1
1
format din ecuaţia (4) şi condiţia iniţială, u se numeşte
problema Cauchy ( nR este o hipersuprafaţă de dimensiune
1n , iar R: este o funcţie dată).
Într-o formă mai generală problema Cauchy este un sistem
compus din ecuaţia (4) şi o suprafaţă 1 nR de dimensiune
1n , prin care trece suprafaţa integrală căutată a ecuaţiei (4).
Dupăcum s-a arătat mai sus, ecuaţia cvasiliniară poate fi redusă la
o ecuaţie liniară omogenă cu derivate parţiale, pentru care vom
formula teorema lui Cauchy.

132
Punctul 0x de pe suprafaţa iniţială nR (din 1 n ) se
numeşte punct necaracteristic al ecuaţiei (2), dacă caracteristica
ecuaţiei (2), ce trece prin acest punct nu este tangentă la
hipersuprafaţa în acest punct.
Teorema lui Cauchy. Fie 0x un punct necaracteristic al ecuţiei
(2) de pe hipersuprafaţa iniţială nR şi funcţia R: este
diferenţială. Atunci există o astfel de vecinătate a punctului 0x ,
încît problema Cauchy, formată din ecuaţia (2) şi condiţia iniţială
u , posedă o singură soluţie pe această vecinătate.
Exemplul 8.5. Să se rezolve problema Cauchy
1:,,,sin
02
3 xRzyxzyu
z
uz
y
uy
x
ux
Rezolvare. Sistemul caracteristic respectiv
z
dz
y
dy
x
dx
2
are integrale prime funcţional independente zxVxyV 2
21 , .
Deci soluţia generală a ecuaţiei cu derivate parţiale are forma
zxxyFu 2, . Aplicăm condiţia iniţială şi obţinem
zyzyFzyu sin,,,1 , de unde obţinem soluţia căutată
zxxyu 2sin .
Exemplul 8.6. Să se rezolve problema Cauchy
3
2
4, yyxz
zy
zxy
x
zx
2:, 2 xRyx .
Rezolvare.Sistemul caracteristic respectiv
z
dz
xy
dy
x
dx
2
are integrale prime funcţional independente
133
x
xyzyxV
x
zzyxV
2
21 ,,,,,
.
Deci, soluţia generală a ecuaţiei considerate poate fi scrisă sub
forma implicită
0,2
x
xy
x
zF .
Dat fiind faptul, că numai o integrală primă conţine variabile z,
din ultima relaţie avem
x
xyfxz
2
.
Din condiţia iniţială obţinem
342
42
y
yf ,
de unde reyultă că 34ttf . Astfel, obţinem soluţia căutată
2
32
4x
xyz
.
Considerăm problema Cauchy, formată din ecuaţia cvasiliniară
zyxby
zzyxf
x
zzyxf ,,,,,, 21
(6)
şi curba
tztytxRzyx ,,:,, 3 (7)
Soluţia problemei Cauchy (6)-(7) va fi suprafaţa integrală S a
ecuaţiei (6), care trece prin curba dată (7).
Vom presupune, că funcţiile bff ,, 21 sunt de clasă 1c într-un
domeniu 3RD , în care se consideră ecuaţia, şi
2
2
2
1 ff .
Fie RDVV :, 21 in sistem fundamental de integrale prime ale
ecuaţiei (6). Suprafaţa integrală căutată S este “ţesută „ din
caracteristicile ecuaţiei cvasiliniare (6), care trec prin punctele de
pe curba E.
Fiecare caracteristică este curbă de intersecţie a două suprafeţe de
nivel
134
2211 ,,,,, czyxVczyxV .
Considerăm aplicaţia 2: RD ,
zyxVzyxVzyx ,,,,,,, 21 . În fond, aplicaţia este o
proiecţie a domeniului D de-a lungul caracteristicilor ecuaţiei (6)
pe o suprafaţă P, transversală (care nu este tangentă)
caracteristicilor. Pe suprafaţa P vom considera un sistem de
coordonate 21 ,cc .
Dacă curba E nu este o caracteristică a sistemului (6), atunci
imaginile curbei E şi a suprafeţei S la aplicaţia coincid:
SE . Ecuaţia curbei (imaginea curbei ) poate
fi scrisă în formă parametrică, ţinînd cont de parametrizarea (7) a
curbei , şi anume
tttVctttVC ,,,,,: 2211 . (9)
Prin excluderea parametrului t reducem ecuaţia curbei la forma
: 0, 21 CCF ,
Astfel, suprafaţa căutată
zyxRzyxS ,,:,, 31 are ecuaţia
0,,,,, 21 zyxVzyxVF .
Dacă curba este o caracteristică a ecuaţiei (6), atunci imaginea
este un punct şi nu coincide cu imaginea S , ceea ce nu
permite soluţionarea problemei Cauchy.

135
Exemplul 8.7. Să se găsească suprafaţa integrală a ecuaţiei
0
y
zz
x
zx ce trece prin curba 32 ,: xzxy .
Rezolvare. Ecuaţia considerată este cvasiliniară şi are sistemul
caracteristic
0
dz
z
dy
x
dx
.
Acest sistem are integrale prime funcţional independente
z
yxVzV ln, 21
.
Introducem pe curba parametrizarea 32 ,, tztytx .
Înlocuim aceste expresii în relaţiile
21 ln, cx
yxcz (10)
şi obţinem
21
3 1ln, c
ttct .
Eliminînd t, avem
23
1
11ln3
1ccc
.
Înlocuim expresiile pentru 21 ,cc în ultima egalitate şi obţinem
egalitatea (în formă implicită) a suprafeţei căutate
z
yxzz
lnln3
13
1
.
Recommended

















