Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
13
Capítulo II
MODELAGEM DE SISTEMAS DE POTÊNCIA
1. INTRODUÇÃO
Quando o objetivo é a análise do controle, elementos do sistema tais como: unidades
geradoras, máquinas motrizes, etc., são convenientemente representados por equações
diferenciais lineares que descrevam seu comportamento na operação com pequenas
perturbações (ou pequenos sinais).
As unidades geradoras são aproximadas por fontes de tensão alternada constante.
As velocidades ou freqüências destas fontes são determinadas por equações de quantidade
de movimento que ligam torques mecânicos (aceleradores) aos torques de inércia
desenvolvidos pelos rotores das máquinas e pelos torques desaceleradores produzidos pela
carga alimentada.
2. CONCEITOS BÁSICOS DA MECÂNICA DE ROTAÇÃO
A análise de qualquer sistema de potência, com o objetivo de estudar sua dinâmica,
envolve algumas propriedades mecânicas das máquinas que constituem o sistema. Isto se
deve ao fato que, após uma perturbação qualquer, as máquinas devem ajustar os ângulos
relativos de seus rotores, a fim de cumprir as condições impostas de transferência de
potência.
O problema é, portanto, tanto elétrico quanto mecânico, e, certos princípios e
equações da mecânica de rotação devem ser lembrados. As principais grandezas
mecânicas envolvidas estão relacionadas no quadro da tabela I.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
14
Tabela I – Grandezas mecânicas envolvidas em estudos dinâmicos
Nome da grandeza Símbolo e equação Unidade (S.I.)
Deslocamento angular mecânico mθ rad
Velocidade angular mecânica mm
d
dt
θω = rad/s
Aceleração angular mecânica mm
d
dt
ωα = rad/s2
Momento de inércia J kg m2 ou Js2/rad2
Conjugado ou torque mecânico m mT J= α N m ou J/rad
Quantidade de movimento angular (momentum) mM J= ω Js/rad
Trabalho mecânico m m mW T d= θ∫ J ou joules
Potência mecânica mm m m
dWP T
dt= = ω W ou watts
A energia cinética (G) de um corpo em rotação é expressa por:
2m
1G J [J]
2= ω (01)
Sendo ωm expresso em rad/s, a energia cinética em joules, a expressão (01) mostra
que o momento de inércia J pode ser dado também em joule × seg2/rad2 (ou Js2/rad2).
Note que a palavra radiano (rad) aparecer como unidade na tabela I, porém, esta não
é de fato uma unidade e poderia, portanto, ser eliminada caso desejado.
Aplicando os conceitos acima para uma unidade geradora, a energia armazenada nas
massas girantes, que compreenderá o rotor, a turbina, etc., será melhor expressa em
MegaJoule (ou MJ), e os ângulos em graus elétricos.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
15
Para o caso da máquina operando à velocidade angular mecânica constante ou
aproximadamente constante (suposição normalmente usada nos estudos de transitórios
eletromecânicos) tem-se que o produto J ωm (com ωm a velocidade angular mecânica obtida
na condição nominal de operação) será constante e representado pelo chamado
MOMENTUM (M):
mM J [Js / rad]= ω (02)
Nota: Na condição nominal tem-se ωm = ωms = velocidade mecânica nominal (síncrona).
A grandeza J do movimento de rotação é análoga a massa no movimento de
translação. Assim, a mesma varia enormemente com o porte do conjunto turbina-alternador.
Embora, conforme se verá oportunamente, M seja uma constante bastante utilizada, esta
sua grande dependência com as características físicas do conjunto gerador sugere a
definição de uma outra grandeza quase que invariável com a potência da máquina. Assim
surge a CONSTANTE DE INÉRCIA - H, definida como:
2m mEnergia cinética armazenada G (1/ 2)J (1/ 2)M
HPotência nominal da máquina S S S
ω ω= = = = (03)
Nota: Se a energia cinética for dada em MJ (MegaJoule) e a potência nominal em MVA,
então a unidade de H será MJ/MVA ou MW.s/MVA ou s.
De (03):
m1
SH M2
= ω (04)
Se M for expresso em MJ × s/graus elétricos, então, ωm deverá ser também dado em
graus elétricos/s, isto é:
om 360 f [graus elétricos/s]ω = (05)
e
o1SH M(360 f )
2=

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
16
De onde:
o
SHM [MJ×s/graus elétricos]
180 f= (06)
A última expressão fornece, pois, a relação entre M e H.
O valor de H tem, conforme já citado, a grande vantagem de não variar muito com
tamanho da máquina. Por outro lado, o conhecimento de M é que mais interessa aos
estudos de estabilidade transitória.
Existem duas expressões para o cálculo de H, uma em função de WR2 e outra em
função de GD2. Estas são dadas em (07) e (08) abaixo:
2 2102,31WR n
H 10 [s]S
−= × (07)
ou
221,37GD nH [s]
S 1000
= ×
(08)
Sendo:
WR2 = peso de todas as partes rotativas no eixo, multiplicado pelo raio de giração ao
quadrado [libra × pés2 = lb × ft2];
GD2 = peso de todas as partes rotativas no eixo, multiplicado pelo diâmetro ao
quadrado [toneladas × metro2 = ton× m2];
n = número de rotações por minuto (velocidade nominal) [rpm];
S = potência nominal da máquina [MVA].
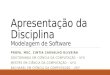
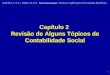
Na ausência de maiores informações sobre as máquinas, têm-se as recomendações
práticas da tabela II e figuras 2.1 e 2.2, mostradas a seguir.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
17
Tabela II – Valores típicos da constante de inércia H de máquinas síncronas
Tipo de máquina síncrona Constante de inércia H [MJ/MVA ou s]
Turbo-alternador 3 < H < 7 (ver figura 2.1)
Alternador hidráulico 2 < H < 4 (ver figura 2.2)
Compensador síncrono 1 < H < 2
Motor síncrono 0,5 < H < 2
Figura 2.1 – Valores de H para turbo-alternadores de grande porte (turbina incluso) (A) 1800 rpm - com condensação (B) 3600 rpm - com condensação (C) 3600 rpm - sem condensação
Figura 2.2 – Valores de H para alternadores hidráulicos do tipo vertical (A) 450 a 514 rpm, (B) 200 a 400 rpm, (C) 138 a 180 rpm, (D) 80 a 120 rpm.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
18
Se várias máquinas síncronas estiverem operando em paralelo, com suas constantes
de inércia dadas por:
1 2 n1 2 n
1 2 n
G G GH ; H ; H
S S S= = =L (09)
então, a constante de inércia de uma máquina equivalente será dada por:
eq 1 2 neq
eq 1 2 n
G G G GH
S S S S
+ + += =
+ + +
L
L
ou,
1 2 neq 1 2 n
eq eq eq
S S SH H H H
S S S
= + + +
L (10)
De (10) se conclui que a constante de inércia total equivalente é a soma das
constantes de inércias individuais, referidas à potência nominal da máquina equivalente.
Exemplo 1: Um alternador tem as seguintes especificações: 6,8 MVA, 300 rpm, 60 ciclos/s,
GD2 = 180 ton×m2. Calcular a constante de inércia e o momentum M.
Solução 1:
De (08): 2
180 300H 1,37 3,26 [MJ / MVA]
6,8 1000
= × =
De (06): 3
o
6,8 3,26M 2,05 10 [MJ×s/graus elétricos]
180 60
−×= = ×
×
Exemplo 2: Um alternador A tem como características nominais: 50 Hz, 60 MW, 75 MVA,
1500 rpm e H = 7,5 MJ/MVA. Os correspondentes dados para um outro
alternndor B são: 50 Hz, 120 MW, 133,3 MVA, 3000 rpm e H = 4,5 MJ/MVA. Se
os dois alternadores operam em paralelo em uma central de geração, calcular
os parâmetros de um alternador equivalente.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
19
Solução 2:
Seq = 75 + 133,3 = 208,3 MVA
De (10): eq
75 133,5H 7,5 4,5 2,7 2,88 5,58 [MJ / MVA]
208,3 208,3
= + = + =
3. EQUAÇÃO DE OSCILAÇÃO
Nos desenvolvimentos que se seguem, procurar-se-á obter a variação do ângulo δ
em função do desequilíbrio entre as potências elétrica e mecânica. Inicialmente, seja a
expressão do torque desenvolvido em um corpo em rotação:
a mT J= α (11)
Para a máquina síncrona tem-se que:
a m eT T T= − (12)
onde:
Ta = torque acelerante
Tm = torque mecânico
Te = torque elétrico
No regime permanente Tm = Te e Ta = 0. Porém, sob condições transitórias pode-se
ter Ta ≠ 0. A figura a seguir ilustra Tm e Te.
Figura 2.3 – Interpretação física dos torques: mecânico e elétrico

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
20
Quando da existência de um torque (Ta), acelerante ou desacelerante, é importante
considerar o movimento mecânico do rotor. Este movimento, porém, deve ser estabelecido
com base em uma referência, que normalmente corresponde a um eixo que gira à
velocidade síncrona. Assim, a oscilação mecânica, medida em termos de um ângulo
deslocamento do rotor (θm), com relação a um eixo de referência fixo é:
m 0 m s 0 m( )tθ = θ + ω − ω = θ + δ (13)
De onde:
m mm s
d d'
dt dt
θ δ= = ω − ω = ω (14)
Sendo ω’ = velocidade angular relativa. Derivando novamente (14):
2 2m m m
2 2
d d d d '
dt dtdt dt
θ δ ω ω= = = (15)
Sendo δm a medida do deslocamento angular mecânico entre o eixo do rotor (que gira
a velocidade ωm) e um eixo que gira a velocidade síncrona ωs, pode-se interpretar δm
conforme indicado na figura 2.4.
Figura 2.4 – Eixos mecânico e síncrono para um tempo t genérico

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
21
Neste ponto é importante definir o ângulo que mais interessa aos estudos.
Realmente, enquanto que δm está associado a um fenômeno mecânico, existe o seu
correspondente ângulo elétrico δ. A relação entre estes ângulos é:
[graus elétricos] = (P/2)×[graus mecânicos]
De onde:
m(P / 2)δ = × δ (16)
onde: P = número de pólos (P/2 = número de pares de pólos)
Este último resultado mostra que sendo constante a relação entre os dois ângulos,
pode-se analisar todo o transitório eletromecânico em termos da variação de δ, e,
posteriormente, o transformar em δm, se houver interesse.
Com base nestas considerações, é usual substituir o termo d2θm/dt2 ou d2δm/dt2 por
d2δ/dt2. Na verdade, a substituição direta δm = δ só ocorrerá se P = 2. Nos demais casos é
necessário a introdução do número de pares de pólos (P/2).
Assim, de (11) e (12):
2m
a m e m 2
dT T T J J
dt
δ= − = α = (17)
Dividindo tudo pelo torque base para obter os torques em p.u., sendo TB=Sn/ωms
(sendo Sn a potência nominal e ωms a velocidade mecânica nominal da máquina), tem-se:
2ms m
a m e 2n
J dT T T
S dt
ω δ= − = (18)
Da definição de H em (03), tem-se para a condição nominal:
2m
a m e 2ms
2H dT T T
dt
δ= − =
ω (19)

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
22
De (16) e sabendo que ωms = (2/P) ωs (sendo ωs = 2πf), tem-se:
2
a m e 2s
2H dT T T
dt
δ= − =
ω (20)
Manipulando esta equação:
a m es
d d / dtT T T 2H
dt
δ= − =
ω (21)
ou
a m e
d dT T T 2H (p ) M (p )
dt dt= − = δ = δ (22)
Sendo: pδ = desvio (variação) da velocidade elétrica em p.u.
M = 2H = momentum expresso em segundos (s)
Nota: O desvio ou variação da velocidade elétrica em p.u. (pδ) pode ser obtido por:
0 sp 1 [p.u.]δ = ω − ω = ω − ω = ω − (23)
Em p.u. as potências e torques são praticamente iguais. Assim, pode-se escrever a
equação (22) em termos de potência (em p.u.), em função de H ou M (em s), como:
a m e
dP P P 2H (p )
dt= − = δ (24)
a m e
dP P P M (p )
dt= − = δ (25)
Nota: Como os torques ou potências que aparecem nas expressões a seguir são
normalmente expressos em p.u., a barra, que é colocada acima destas grandezas
para indicar esta condição, será omitida a partir da próxima seção.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
23
4. CONJUNTO ISOLADO GERADOR – CARGA
Inicialmente será útil examinar o caso de um gerador isolado suprindo uma carga
elétrica com potência P0, como mostrado na figura 2.5.
Figura 2.5 – Esquema de um conjunto isolado gerador-carga
Sob condições de regime permanente, o gerador da figura 2.5 alimenta a carga com
potência P0, com freqüência constante ω0. Pela definição de “regime permanente”, o torque
mecânico de acionamento é igual ao torque elétrico de frenagem.
Serão examinadas agora as equações do estado de equilíbrio, usando o subscrito “0”
para indicar este estado. A figura 2.6. é uma descrição, através de diagrama de blocos da
função de transferência da velocidade de um gerador em função dos torques. Ela define as
relações entre as variações da velocidade (pδ) e as variações nos torques (∆Tm e ∆Te).
Figura 2.6 – Diagrama de blocos do conjunto isolado gerador-carga

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
24
Observando a figura 2.6 tem-se a equação em forma operacional da seguinte
maneira:
[ ]m e
1p (s) T (s) T (s)
Msδ = ∆ − ∆ (26)
onde: M = momento de inércia efetiva do rotor da máquina (em segundos);
∆Tm = variação do torque da máquina motriz (em p.u.);
∆Te = variação do torque elétrico (em p.u.);
pδ = desvio da freqüência ou da velocidade ω0 (em p.u.);
ω0 = freqüência ou velocidade de regime permanente (em p.u.);
ω = ω0 + pδ = 1 + pδ = freqüência ou velocidade real do rotor (em p.u.);
A equação (26) pode também ser expressa no domínio do tempo por:
[ ]m e1
p (t) T (t) T (t) dtM
δ = ∆ − ∆∫ (27)
Com relação a constante de inércia (H) em s, ou kWs/kVA, ou MWs/MVA, tem-se que
M = 2H nas equações (26) ou (27), M = 2H desde que T e pδ estejam em p.u. Estas
equações podem ser obtidas a partir da expressão (22).
A representação da figura 2.6 pode ser usada para simular uma única máquina ou um
grupo de máquinas rigidamente acopladas em um sistema de potência. Neste último caso, a
constante de inércia M á a soma composta das inércias de todas as máquinas, a variável
∆Tm representa a variação total no torque das máquinas motrizes do sistema e ∆Te
representa a variação total no torque elétrico sistema.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
25
5. AMORTECIMENTO DO SISTEMA
A relação expressa pela figura 2.6 é entre torque e velocidade, porém, é mais
significativo deduzir uma relação que envolva as variações básicas de potência elétrica e
mecânica. A relação entre potência e torque é dada por:
P T= ω (28)
Desenvolvendo a equação (28) para pequenas oscilações fazendo:
0P P P= + ∆
0T T T= + ∆
0 pω = ω + δ
e desprezando os termos de segunda ordem, obtém-se:
0 0P T T p∆ ≈ ω ∆ + δ (29)
Da equação (29):
0
0 0
T pPT
δ∆∆ = −
ω ω (30)
Usando a equação (30) na figura 2.6 e lembrando que ω0 = 1 p.u., chega-se ao
diagrama de blocos da figura 2.7, onde os desvios de velocidade por unidade pδ são
expressos em função das variações das potências elétrica e mecânica.
A potência mecânica no eixo da turbina é essencialmente uma função da posição da
válvula e independente da freqüência (em alguns tipos de turbinas hidráulicas isto nem
sempre é válido visto que as variações de velocidade podem afetar a potência desenvolvida
a despeito da posição da válvula)

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
26
(a) Diagrama completo com aplicação da equação (30)
(b) Agrupando os somadores do diagrama (a) (c) Considerando Tm0=Te0 no diagrama (b)
Figura 2.7 – Diagramas de blocos do conjunto gerador-carga com os desvios de velocidade (pδ) expressos em por unidade em função das variações das potências elétrica e mecânica
Já a potência elétrica depende das características da carga e pode, portanto, ser
afetada pela freqüência. Esta dependência pode ser expressa por:
e LP P (1 D p )′= + δ (31)
onde: PL = carga conectada na freqüência normal;
D’ = característica de freqüência da carga.
Nota: No caso de uma carga puramente resistiva a potência elétrica seria independente
da freqüência, isto é, D’ da equação (31) seria nulo.
Em geral, as cargas de um sistema de potência são uma composição de cargas de
motores com várias características de velocidade-torque, cargas de iluminação e de
aquecimento. Alterações de freqüência causam alterações de carga devido a mudanças nas

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
27
velocidades dos motores, bem como devido a alterações na tensão, nos pontos de
utilização, causadas por alterações de freqüência.
Valores representativos de amortecimento de sistemas são D’ = 1 ou D’ = 2 p.u. Um
valor de D’ = 2 significa que uma variação de 1% na freqüência causaria uma variação de
2% na carga, na base da carga conectada.
Desenvolvendo a equação (31) na forma de pequenas perturbações, e desprezando
termos de segunda ordem, obtém-se:
e L L0P P D P p′∆ = ∆ + δ (32)
A figura 2.8 mostra o diagrama de blocos do sistema de potência contendo uma
máquina isolada equivalente e uma carga PL0 conectada com uma característica de
amortecimento D’PL0 = D.
Figura 2.8 – Diagrama de blocos do conjunto gerador-carga (carga conectada com característica de amortecimento D’)
O termo de amortecimento D’PL0 = D é proporcional à carga PL0 conectada e à
característica sensitiva de freqüência da carga D’. Assim, D tende a zero para um sistema
levemente carregado.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
28
6. UNIDADES E SISTEMA P.U.
Desde que o sistema por unidade é largamente utilizado na análise de sistemas de
potência, é conveniente selecionar uma base para as potências ∆PM e ∆PL, etc. Poderia ser
uma base arbitrária, embora seja freqüentemente selecionada uma base que esteja próxima
da potência nominal do sistema que está sendo representado.
O valor da base (em MVA ou kVA) escolhido deve ser usado na determinação do
valor de M (como na equação (25)) e do parâmetro D. A variável pδ é usualmente expressa
em por unidade na base da freqüência nominal.
Exemplo 3: Um sistema de potência isolado compreendendo duas unidades de 500 MVA
suprindo uma carga conectada de 750 MW. A constante de inércia de cada
unidade é H = 3,5 s na base da máquina. A carga varia de 1% para 1% de
variação da freqüência. Expresse as constantes M e D do diagrama de blocos
da figura 2.8, na base de 1000 MVA.
Solução 3:
Cálculo da inércia equivalente para as 2 unidades na base de 1000 MVA
H 2 3,5 (500 /1000) 3,5 s= × × =
Cálculo da constante M na base de 1000 MVA
M 2H 2 3,5 7 s= = × =
Cálculo do amortecimento na base de 1000 MVA
D 1 (750 /1000) 0,75 pu= × =
A figura 2.9 mostra o diagrama de blocos deste sistema com estes valores
numéricos na base de 1000 MVA. Note que este mesmo sistema na base de
500 MVA teria as seguintes constantes (em pu):
M = 7 (1000/500) = 14 s
e
D = 0,75 (1000/500) = 1,5 p.u.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
29
Figura 2.9 – Diagrama de blocos do sistema do exemplo 3
(M = 7 p.u. e D = 0,75 p.u. na base de 1000 MVA)
A resposta da freqüência do sistema para uma variação em degrau na carga ∆PL,
seria:
L LP 1 P / Dp (s)
s Ms D s[1 s(M / D)]
∆ ∆δ = − = −
+ + (33)
Nota: No domínio do tempo a equação (33) resultaria em:
( )t /(M / D)LPp (t) 1 e
D
−∆δ = − − (34)
A figura 2.10 mostra o gráfico da variação da freqüência em função do tempo para a
entrada degrau na carga. A taxa de variação inicial da freqüência no tempo t 0+= é ∆PL/M
p.u./s. O valor final é -∆PL/D e a constante de tempo (ou o tempo para variação de 63%) é
M/D segundo.
Figura 2.10 – Resposta da freqüência (pδ) do sistema gerador-carga para uma variação degrau na carga (∆PL)

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
30
7. ACOPLAMENTO ELÉTRICO ENTRE MÁQUINAS
Passando do caso de uma máquina isolada para o de máquinas operando em
paralelo ou sistemas de potência operando interligados, é útil examinar o caso de duas
máquinas síncronas operando em paralelo, conectadas através de uma reatância X12, como
na figura 2.11.
O fluxo de potência entre as duas máquinas da figura 2.11 é dado pela expressão
familiar potência-ângulo. Assim, P12 é a potência transferida da fonte de tensão E1 para a
fonte E2, sendo expresso por:
1 212 12
12
E EP sen
X= δ (35)
Figura 2.11 – Sistema com duas máquinas síncronas interligadas
A solução da equação do ângulo de potência em sua forma não linear é tratada em
análises de estabilidade transitória, onde são consideradas grandes sobrecargas e grandes
desvios angulares. Objetivando a análise do controle, o interesse reside em pequenas
variações em torno de um ponto de operação, e a equação (35) pode ser expressa, em
forma de pequenas oscilações, pela equação linear:
1 212 12 12 s 12
12
E EP cos T
X
∆ = δ ∆δ = ∆δ
onde
1 2s 12
12
E ET cos
X= δ = coeficiente de torque sincronizante [p.u.]

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
31
O coeficiente Ts representa a inclinação ∆P12/∆δ12 da curva potência-ângulo da figura
2.11 em torno do ponto de operação. A variação do ângulo ∆δ12 é obtida pela integração da
variação da freqüência entre as máquinas 1 e 2, pδ1 - pδ2.
Figura 2.12 – Curva potência-ângulo para o sistema com duas máquinas síncronas interligadas
Nas representações anteriores, com diagramas de blocos, a variável pδ foi expressa
em por unidade (p.u.) da freqüência nominal. Para converter este termo para
radianos/segundo, deve-se multiplicá-lo por ω0 ou 377 rad/s. Assim, quando este termo é
integrado fornecerá δ12 em radianos para uso na equação (35).
O diagrama de blocos que descreve duas máquinas, ou grupos de máquinas
acopladas, é mostrado na figura 2.13, onde o coeficiente de torque sincronizante (Ts) foi
multiplicado por 377 rad/s, ou seja:
1 2s 12
12
E ET 377 T 377 cos
X= × = × δ
Note que o intercâmbio de potência entre as máquinas TL12 1 2T
P (p p )s
∆ = δ − δ age
como uma carga para o grupo de máquinas 1 e como geração para o grupo de máquinas 2.
Este fato é indicado por sinais apropriados nos somadores do diagrama de blocos da figura
2.13.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
32
Figura 2.13 – Diagrama de blocos para o sistema com duas máquinas síncronas interligadas
Portanto, foi deduzido um modelo de um sistema de duas máquinas, ou de dois
sistemas de potência interligados através de uma linha de interligação (“tie line”,
representando somente a parte que fornece a freqüência do sistema e o intercâmbio na linha
de interligação, a partir das potências da máquina motriz e da carga.
Resumindo, as variáveis e as constantes básicas que entram no modelo são:
∆Pm = variação da potência da máquina motriz (em p.u.);
∆PL = variação da carga na freqüência nominal (em p.u.);
∆PTL = variação da potência elétrica entre as máquinas (em p.u.);
pδ = variação da freqüência em torno da síncrona (em p.u. da freqüência base,
onde 1 p.u. = 377 rad/s para sistemas de 60 Hz);
M = constante de inércia = 2H (em segundos) na mesma base da máquina motriz
ou potência da carga;
D = amortecimento do sistema (p.u. potência / p.u. pδ);
T = coeficiente de torque sincronizante (p.u. potência × 377 rad/s).

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
33
Será examinada agora a natureza desse modelo de sistema de potência. Usando a
fórmula G/(1+GH) para redução de diagrama de blocos, determina-se a função de
transferência total relacionando pδ1 a ∆PL1. Isto é, faz-se todas as outras entradas ∆Pm1,
∆Pm2 e ∆PL2 iguais a zero e determina-se pδ1 para um degrau em ∆PL1 = ∆PL.
Partindo do diagrama de blocos da figura 2.13, a figura 2.14 mostra uma série de
reduções que são evidentes por si mesmas.
(a) Primeira redução
(b) Segunda redução
(c) Terceira redução
Figura 2.14 – Reduções do diagrama de blocos da figura 2.13

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
34
A expressão final da função de transferência pode ser simplificada ainda mais se as
unidades forem supostas iguais, ou áreas com M1 = M2 = M e D1 = D2 = D, chegando-se a:
21
2L1
p (Ms Ds T)
P (Ms D)(Ms Ds 2T)
∆ δ − + +=
∆ + + + (36)
Para este caso, o teorema do valor final (t → ∞ ou s → 0) mostra que, para uma
variação em degrau unitário em ∆PL1 (isto é ∆PL1 = ∆PL.= 1), o resultado é:
T 1
2DT 2D
− −=
A resposta no tempo de ∆pδ1, para um degrau unitário em ∆PL, é obtida tomando a
Transformada Inversa de Laplace de:
2
12 2
(Ms Ds T)p (s)
D D 2TsM (s )(s s )
M M M
− + +∆ δ =
+ + +
(37)
Quando (D/2M)2 é pequeno relativamente a (2T/M), esta expressão é
aproximadamente igual a:
2
12 2
(Ms Ds T)p (s)
D D 2TsM (s ) (s ) )
M 2M M
− + +∆ δ =
+ + +
e a inversa é:
D Dt t
M 2M1 1 2 3
2Tp (t) k k e k e sen t
M
− − ∆ δ = + + + ψ
(38)
onde k1, k2 e k3 podem ser obtidas pelas regras das frações parciais e transformação inversa
de Laplace.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
35
A figura 2.15 mostra o comportamento dos dois sistemas interligados diante de uma
súbita alteração de carga na área 1, admitindo que não haja variação nas potências das
máquinas motrizes.
Nota-se o desvio final em regime permanente da freqüência em ambas as áreas, que
se estabiliza em ∆L/2D.
Observa-se também as oscilações de pδ e ∆PTL, com uma freqüência igual a 2T / M
que tipicamente se situa entre 0,2 e 2 Hz, dependendo dos valores de T e de M. Quanto
maior T, isto é, quanto menor for a reatância entre as máquinas ou entre os sistemas, maior
será a freqüência de oscilação.
O amortecimento do sistema, anteriormente discutido, contribui para a taxa de
decréscimo dessas oscilações. Os enrolamentos amortecedores e os enrolamentos de
campos das máquinas são também uma fonte de amortecimento, especialmente para altas
freqüências.
Figura 2.15 – Resposta da freqüência para dois sistemas interligados diante de uma súbita alteração de carga na área 1

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
36
Salienta-se que foi observado o comportamento do sistema de potência não incluindo
os efeitos do regulador de velocidade da máquina motriz. Isto seria equivalente à operação
com o regulador bloqueado.
Freqüentemente aparecem situações onde é preciso considerar um sistema finito
interligado a um grande sistema que, para efeitos práticos, pode ser tomado como infinito
(pδ2 = 0). Para este caso, o diagrama de blocos do sistema é mostrado na figura 2.16.
A função de transferência entre pδ1 e ∆PL1 está indicada na figura 2.17, mostrando
que o desvio de freqüência em regime permanente é zero, como era de se esperar do
sistema interligado com o sistema infinito, cuja freqüência não pode variar.
A função de transferência entre ∆PTL e ∆PL1 está indicada na figura 2.18, com um
ganho em regime permanente de -1, isto é, toda a variação de carga na área 1 é
compensada pelo suprimento através da linha de interligação, proveniente da área infinita
vizinha.
Observe que a freqüência de oscilação é T / M em radianos/segundos, onde M é a
inércia da área finita e T é o coeficiente de torque sincronizante entre as áreas.
Figura 2.16 – Diagrama de blocos para um sistema finito conectado a um sistema infinito

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
37
Figura 2.17 – Função de transferência entre pδ1 e ∆PL1 do diagrama da figura 2.16
Figura 2.18 – Função de transferência entre ∆PTL e ∆PL1 do diagrama da figura 2.16
8. EQUIVALÊNCIA
Pode-se tirar algumas conclusões, a partir das expressões da figura 2.14, para se
chegar a maneiras lógicas pelas quais os sistemas de múltiplas máquinas possam ser
aproximados por um reduzido número de máquinas.
Um caso que se justifica a concentração das máquinas é aquele em que distúrbios
atingem com simetria várias máquinas, não dando lugar, desta maneira, a oscilações entre
as mesmas.
No exemplo da figura 2.15, se a alteração de carga atingisse ambas as áreas com
igual peso, isto é, se ∆PL1 = ∆PL2 = ∆PL/2, então a freqüência natural das oscilações entre as
máquinas não seria excitada, não haveria alteração no fluxo de potência de interligação e
ambas as freqüências seguiriam o decréscimo monótono da figura 2.15, sem oscilações.
Obviamente, para tal caso, o comportamento das máquinas poderia ser representado
pelo comportamento de uma única máquina equivalente.
Um outro caso em que se justifica a concentração das máquinas é aquele em que
elas estão rigidamente acopladas, isto é, quando o valor do coeficiente de torque
sincronizante for grande.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
38
Seja a expressão da parte inferior da figura 2.14 que relaciona a variação de
freqüência pδ1 à variação de carga do sistema ∆PL1, dada por:
21 2 2
3 2L1 1 2 1 2 2 1 1 2 1 2 1 2
p (s) (M s D s T)
P (s) M M s (D M D M )s [D D T(M M )]s T(D D )
δ − + +=
∆ + + + + + + +
(39)
Tomando o limite desta expressão, quando T → ∞, tem-se:
1
L1 1 2 1 2
p (s) 1
P (s) (M M )s (D D )
δ −=
∆ + + + (40)
Pode-se notar que a expressão (40) tem a mesma forma daquela da área simples
isolada, deduzida no exemplo 3 (equação (34)).
A máquina simples equivalente tem uma inércia igual à soma das inércias e o
amortecimento equivalente do sistema é, da mesma forma, igual à soma dos termos de
amortecimento dos sistemas individuais.
9. POTÊNCIA ELÉTRICA DA MÁQUINA
Na análise de controle de carga-freqüência, é necessário algumas vezes representar
a potência elétrica medida de uma máquina ou de um grupo de máquinas. Um modo simples
de deduzir esta potência, a partir dos diagramas de blocos até agora desenvolvidos, será
mostrado aqui.
Voltando ao diagrama de blocos da figura 2.8 e acrescentando a potência da linha de
interligação ∆PTL, tem-se a representação da figura 2.19, onde se preserva a identidade de
∆Pe que é a potência elétrica da unidade, ou da unidade equivalente.
Na figura 2.19 pode-se identificar a saída do somador x como sendo:
m eP P x∆ − ∆ = (41)
portanto, ∆Pe = ∆Pm – x , onde x é a potência de aceleração.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
39
Figura 2.19 – Diagrama de blocos do conjunto gerador-carga incluindo a potência da linha de interligação ∆PTL
No diagrama de blocos mais comum, onde a identidade de ∆Pe não é preservada,
pode-se deduzir o valor de ∆Pe da equação (41), conforme mostrado no diagrama de blocos
da figura 2.20.
Figura 2.19 – Diagrama de blocos modificado da figura 2.19

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
40
Em muitos estudos pode ser necessário preservar a identidade das máquinas
motrizes, ao passo que o comportamento elétrico das unidades pode ser simulado
adequadamente considerando as unidades como um gerador equivalente. Para tal caso, o
modelo seria como mostrado na figura 2.21.
Observa-se, na figura 2.21, a formação das potências elétricas pelas potências
mecânicas menos as correspondentes potências de aceleração. Note que MA é a soma das
inércias das unidades individuais em uma área, isto é, MA = M1 + M2 + ... .
Figura 2.20 – Diagrama de blocos modificado da figura 2.20

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
41
10. COMENTÁRIOS SOBRE OS MODELOS DESENVOLVIDOS
Os modelos até agora desenvolvidos se prestam para mostrar o comportamento
dinâmico das unidades de geração ou dos sistemas de potência como um todo. Deve-se
ressaltar que estes modelos, embora adequados para o estudo dos controles de regulação e
de carga-freqüência, são apenas aproximados.
Em particular, o amortecimento envolve efeitos que foram desprezados,
especialmente os torques de amortecimento desenvolvidos nos enrolamentos de campo e
amortecedores das unidades de geração. Estes são funções do deslizamento ou das
velocidades relativas entre as unidades e, para um sistema de múltiplas máquinas, exigiriam
uma representação muito minuciosa de geradores e sistemas de excitação.
Tais torques de amortecimento são algumas vezes referidos como “torques de
indução”, em contraste com os torques síncronos.
Visto que os torques de indução são intensamente afetados pela impedância externa,
estes não são significativos para o caso de representação de geração em uma área, como
uma máquina única equivalente, interligada a outra área através de uma impedância por
unidade, razoavelmente alta, na base da máquina equivalente.
Concluindo, deve-se ressaltar que os modelos vistos até aqui (representados por
diagramas de blocos e funções de transferência) são válidos apenas para pequenas
variações de velocidade (pδ), ângulo do rotor (∆δ) e torques (∆Tm, ∆Te). Para o caso da
análise de estabilidade transitória, quando ocorrem geralmente grandes oscilações do
ângulo δ, tais modelos não se aplicam.

Capítulo II – Modelagem de Sistemas de Potência FEELT/UFU
42
ANOTAÇÕES
Recommended