
1
Universidade Federal do Rio de Janeiro
Escola Politécnica
Engenharia Naval e Oceânica
POLI/UFRJ
Projeto de Graduação
AVALIAÇÃO DOS EFEITOS VISCOSOS E DE ONDAS NO
AMORTECIMENTO EM ROLL DE PLATAFORMAS FLUTUANTES
OFFSHORE
Ian Estephá Pereira
DRE: 108042293
PROJETO SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE
ENGENHARIA NAVAL E OCEÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS
PARA A OBTENÇÃO DO GRAU DE ENGENHEIRA NAVAL E OCEÂNICA.
Orientador: Claudio Alexis Rodríguez Castillo, D.Sc.
Rio de Janeiro
Fevereiro, 2014

2
Universidade Federal do Rio de Janeiro
Avaliação dos Efeitos Viscosos e de Ondas no Amortecimento em Plataformas Flutuantes Offshore
Ian Estephá Pereira
DRE: 108042293
Habilitação:
Engenharia Naval e Oceânica
Banca Examinadora:
Claudio Alexis Rodríguez Castillo, D.Sc., (Orientador)
Marcelo de Almeida Santos Neves, Ph.D.
Miguel Angel Celis Carbajal, M.Sc.
Rio de Janeiro
Fevereiro, 2014

3
Avaliação dos Efeitos Viscosos e de Ondas no Amortecimento em Plataformas Flutuantes Offshore
Ian Estephá Pereira
DRE: 108042293
PROJETO SUBMETIDO AO CORPO DOCENTE DO DEPARTAMENTO DE
ENGENHARIA NAVAL E OCEÂNICA DA ESCOLA POLITÉCNICA DA UNIVERSIDADE
FEDERAL DO RIO DE JANEIRO COMO PARTE DOS REQUISITOS NECESSÁRIOS
PARA A OBTENÇÃO DO GRAU DE ENGENHEIRA NAVAL E OCEÂNICA.
Aprovado por:
____________________________________________
Claudio Alexis Rodríguez Castillo, D.Sc.
(ORIENTADOR)
____________________________________________
Marcelo de Almeida Santos Neves, Ph.D.
____________________________________________
Miguel Angel Celis Carbajal, M.Sc.
Rio de janeiro
Fevereiro, 2014

4
Pereira, Ian Estephá
Avaliação dos Efeitos Viscosos e de Ondas no Amortecimento em
Plataformas Flutuantes Offshore / Ian Estephá Pereira – 2014
Projeto de Graduação – Universidade Federal do Rio de Janeiro, Escola
Politécnica e Escola de Química, Departamento de Engenharia Naval e
Oceânica, Rio de Janeiro, 2014.
Orientador: Claudio Alexis Rodríguez Castillo

5
Dedicatória
Dedico este trabalho a meus pais, Marcio
Claudio Lutterbach e Dilara Estephá,
pessoas queridas e presentes cujo apoio
fora indispensável para que eu chegasse
neste ponto.

6
Agradecimentos
Agradeço ao meu orientador, Claudio Alexis, pelo apoio e disponibilidade durante a
pesquisa, e aos demais Professores da Engenharia Naval e Oceânica, pelos conhecimentos
transmitidos durante o curso. Agradeço também a todos meus verdadeiros amigos, de dentro e
fora da UFRJ, os quais me ajudaram durante minha formação profissional.

7
Resumo
O escopo do presente projeto de graduação consiste em investigar, numérica e
experimentalmente, o amortecimento em Roll de estruturas flutuantes offshore, identificando os
efeitos viscosos e de onda.
A metodologia a ser aplicada consiste em fazer um levantamento dos principais tipos de
plataformas offshore flutuantes ensaiadas no LabOceano. Os modelos em escala serão
modelados numericamente para realizar simulações dos testes de decaimento em águas calmas
no software AQWA.
Em um primeiro momento, o relatório focará em toda a teoria envolvida na análise e
cálculo dos movimentos de uma estrutura flutuante, para então adentrar naquela utilizada para o
cálculo do amortecimento e coeficientes envolvidos.
Por fim, será apresentado o modelo numérico desenvolvido para estimar parte do
amortecimento sofrido pelo modelo Semi Submersível ITTC SR192, cujo teste de decaimento
em Roll foi previamente ensaiado no laboratório LabOceano, o qual se encontra nas
dependências do Campus da UFRJ. Tal resultado será utilizado, em conjunto com a teoria
apresentada, para estimar a parcela do amortecimento total do modelo em Roll advinda dos
efeitos viscosos e de onda.

8
Palavras - Chave
Hidrodinâmica, decaimento, amortecimento, Roll, efeitos viscosos, efeitos de onda,
modelos em escala, LabOceano, séries temporais.

9
Conteúdo
Resumo ......................................................................................................................................................... 7
Palavras - Chave ........................................................................................................................................... 8
Lista de Figuras ........................................................................................................................................... 10
Capítulo 1 .................................................................................................................................................... 12
1.1 Introdução ............................................................................................................................................. 12
Capítulo 2 .................................................................................................................................................... 13
2.1 Teoria .................................................................................................................................................... 13
2.2 Equações do Movimento ....................................................................................................................... 16
2.2.1 Movimentos Não Restaurativos ..................................................................................................... 16
2.2.2 Movimentos Restaurativos ............................................................................................................ 17
2.3 Solução das Equações Normalizadas ................................................................................................... 18
2.4 Objetivo do Teste de Decaimento ........................................................................................................ 20
2.5 Modelos De Amortecimento ................................................................................................................ 21
2.5.1 Forma Quadrática .......................................................................................................................... 22
2.5.2 Forma Cúbica ................................................................................................................................ 22
2.6 Análise do Amortecimento .................................................................................................................. 23
2.6.1 Método do Decremento Logarítmico ............................................................................................. 23
2.6.2 Método da Energia ......................................................................................................................... 25
2.6.3 Método do Amortecimento Equivalente ........................................................................................ 27
Capítulo 3 .................................................................................................................................................... 27
3.1 Roll ....................................................................................................................................................... 27
3.2 Representação Dos Coeficientes De Roll ............................................................................................ 28
3.2.1 Coeficientes Não Lineares ............................................................................................................ 28
3.2.2 Coeficientes Equivalentes ............................................................................................................ 29
3.2.3 Coeficientes de Extinção ............................................................................................................... 31
3.3 Métodos de Previsão de Roll ........................................................................................................... 33
3.3.1 Decomposição do Amortecimento ...................................................................................... 33
3.3.2 Amortecimento por Fricção ................................................................................................ 34
3.3.3 Amortecimento Por Vórtices e Lift .................................................................................... 35
3.3.4 Amortecimento por Ondas .................................................................................................. 37
3.3.5 Amortecimento nas Bolinas ................................................................................................ 39
10
4 Simulação ............................................................................................................................................ 40
4.1 Modelo .............................................................................................................................................. 40
4.1.1 Amotecimento por Geração de Ondas .......................................................................................... 43
4.1.2 Ensaio em Ondas (AQWA) ........................................................................................................... 44
4.2.1 Teste de Decaimento ..................................................................................................................... 44
4.2.2 Teste em Ondas Regulares ...................................................................................................... 55
4.3 Tratamento dos Dados .................................................................................................................... 59
4.3.1 Cálculo do Amortecimento Friccional .................................................................................... 60
4.3.2 Comparação dos Amortecimentos .......................................................................................... 62
Conclusão .................................................................................................................................................... 63
Anexo I ....................................................................................................................................................... 64
Anexo II ...................................................................................................................................................... 65
Referências .................................................................................................................................................. 70
Lista de Figuras
Figura 1 – Movimentos de um corpo flutuante
Figura 2 – Momentos atuantes
Figura 3 – Decaimento
Figura 4 - Dimensões do Modelo (metros)
Figura 5 - Modelo ICEM CFD
Figura 6 - Modelo Rhinoceros
Figura 7 - Modelo AQWA com cortes no calado
Figura 8- Teste de decaimento com amortecimento potencial
Figura 9 - Gráfico do Decaimento em Roll - Série 1
Figura 10 - Gráfico do Decremento Logarítmico X Amplitude - Série 1
Figura 11 - Ajuste Linear - Série 1
Figura 12 - Gráfico Coeficiente de Amortecimento X Amplitude de Movimento – Série 1 – Método do Decremento

11
Figura 13 - Método da Energia com Ajuste Quadrático - Série 1
Figura 14 - Método da Energia com Ajuste Cúbico - Série 1
Figura 15- Amortecimento Total - Série 1 - Método da Energia - Ajuste Quadrático
Figura 16 - Amortecimento Total - Série 1 - Método da Energia – Ajuste Cúbico
Figura 17- Comparativo entre métodos - Amortecimento Total – Série 1
Figura 18 - Gráfico do Decaimento em Roll - Série 2
Figura 19 - Gráfico do Decremento Logarítmico - Série 2
Figura 20 - Ajuste Linear - Série 2
Figura 21 - Gráfico Coeficiente de Amortecimento X Amplitude de Movimento - Série 2 – Método do Decremento
Figura 22 - Método da Energia com Ajuste Quadrático - Série 2
Figura 23 - Método da Energia com Ajuste Cúbico - Série 2
Figura 24 - Amortecimento Total - Série 1 - Método da Energia – Ajuste Quadrático
Figura 25 - Amortecimento Total - Série 1 - Método da Energia – Ajuste Cúbico
Figura 26 - Comparativo entre métodos - Amortecimento Total – Série 2
Figura 27 - Gráfico de ondas medidas no modelo em função do tempo – Ensaio 1
Figura 28 - Gráfico das Amplitudes medidas no modelo em função do tempo – Ensaio 1
Figura 29 - Resposta da Estrutura ao excitamento pelas ondas - Ensaio 1
Figura 30- Amplitudes de Resposta - Ensaio 1
Figura 31 - Gráfico de ondas medidas no modelo em função do tempo - Ensaio 2
Figura 32 - Gráfico das Amplitudes medidas no modelo em função do tempo – Ensaio 2
Figura 33 - Resposta da Estrutura ao excitamento pelas ondas - Ensaio 2
Figura 34 - Gráfico das Amplitudes medidas no modelo em função do tempo – Ensaio 2
Figura 15 - Gráfico Coeficiente de Amortecimento Friccional X Amplitude para ambos os Pontoons - Série 1
Figura 26 - Gráfico Coeficiente de Amortecimento Friccional X Amplitude para ambos os Pontoons- Série 2
Figura 37 - Gráfico Comparativo dos Coeficientes de Amortecimento Friccional para ambos os Pontoons
Figura 48 - Gráfico Comparativo entre Amortecimento Friccional e Amortecimento Total – Ensaio 1
Figura 59 - Gráfico Comparativo entre Amortecimento Friccional e Amortecimento Total – Ensaio 2

12
Capítulo 1
1.1 Introdução
Testes de decaimento realizados em tanques de prova são métodos muito difundidos para
a análise do comportamento de estruturas flutuantes. Os objetivos de tais ensaios geralmente
englobam dois pontos principais: Determinar o período natural da estrutura em todos os
movimentos e estimar os coeficientes de amortecimento relacionados a cada um deles.
Os possíveis movimentos de uma estrutura flutuante são: Heave (Afundamento), Sway
(Deriva), Surge (Avanço), Yaw (Guinada), Pitch (Arfagem), Roll (Jogo). Este último é de
especial importância no projeto de uma embarcação, pois não somente influi na operação, mas
também na segurança da mesma e dos tripulantes.
As dificuldades na previsão do movimento de Roll advém de suas características não
lineares, devido à influência da viscosidade do fluído, bem como de sua dependência da
velocidade de avanço da estrutura em relação ao fluido.
Somado ao complicador acima citado, o amortecimento em Roll pode ser subdividido em
diversas componentes, cada uma variando de modo diferente com fatores como forma do casco,
velocidade de avanço, calado, dentre outros.

13
Capítulo 2
2.1 Teoria
Qualquer corpo flutuante possui seis graus de liberdade, ou seja, pode se movimentar
livremente em seis diferentes direções, a menos que seu movimento seja restringido.
Figura 1 - Movimentos de um Corpo Flutuantes
A análise de movimentos de corpos flutuantes utiliza teoria análoga àquela utilizadas na
análise de vibração de corpos rígidos ligados por molas e amortecedores. Considera-se que o
corpo encontra-se oscilando livremente (tanto linear quanto angularmente) sobre a ação de forças
restauradoras e dissipativas de energia em contraposição às forças externas de excitação
(momentos no caso de movimentos angulares). Como o escopo do relatório é a análise de um
movimento angular específico (Roll), a teoria a seguir será apresentada levando em conta
momentos, deslocamentos, velocidades e acelerações angulares, porém, equações análogas
podem ser obtidas para os movimentos lineares de corpos flutuantes (Heave, Surge e Sway)

14
Figura 2 - Momentos Atuantes
Tais momentos restauradores possuem 3 diferentes componentes. A primeira se deve à
variação do volume submerso (em movimentos restauradores), proporcional ao deslocamento do
corpo:
(1)
Onde:
Deslocamento horizontal do centro de gravidade durante o movimento;
Altura Metacêntrica;
Deslocamento do corpo .
Para pequenos ângulos:
(2)
Onde C é o coeficiente de restauração. Já as demais componentes do momento
restaurador são proporcionais à aceleração e velocidade do corpo:
(3)
A componente proporcional à velocidade angular é chamada de amortecimento, e faz
parte do escopo do relatório analisá-la.

15
A equação regente do movimento pode ser obtida à partir do somatórios de forças atuante
no corpos, pela Segunda Lei de Newton:
(4)
Ou, para um corpo que sofre deslocamento angular:
(5)
(6)
(7)
(8)
Na equação acima, representa a aceleração angular do corpo, a velocidade angular
e o deslocamento e a Inércia Rotacional.
Em testes de decaimento em águas tranquilas, a parcela da direita será considerada
nula, ou seja, não existem forças externas atuando na estrutura. Na presença de ondas, o mesmo
não poderá ser afirmado.

16
2.2 Equações do Movimento
Uma vez que o movimento de um corpo flutuante é composto por seis graus de liberdade,
seu movimento completo resulta em um sistema de equações, totalizando seis equações do
movimento distintas. Três destas são translacionais (Heave, Surge e Sway), e as demais
rotacionais (Roll, Yaw e Pitch).
2.2.1 Movimentos Não Restaurativos
São chamados assim aqueles movimentos do corpo cuja força de restauração não depende
do mesmo, ou seja, terceira componente na equação do movimento independe da forma do
corpo, mas sim de fatores externos à ele, como sistemas de ancoragem, amarração ou
posicionamento dinâmico.
Nesta classe encontram-se os movimentos de Surge, Sway e Yaw. Nas equações
apresentadas, será considerado o caso do teste de decaimento em águas tranquilas, ou seja, sem
forças de excitação externas. As equações apresentadas a seguir levam em conta o
desacoplamento dos movimentos, ou seja, um movimento não influencia os demais e vice versa.
Tal aproximação é aplicável para o caso de decaimento em águas tranquilas.
(9)
(10)
(11)
Nas equações acima, representa a Massa Adicional, a massa do corpo, a Inércia
Adicional e o momento de inércia rotacional do corpo. Como anteriormente citado, é a
componente responsável pelo efeito de amortecimento experimentado pelo corpo enquanto
a componente responsável pela restauração.
Costumeiramente, quando analisando o efeito do amortecimento em estruturas flutuantes,
é utilizada a forma normalizada das equações anteriormente citadas. Esta forma pode ser obtida
dividindo-se os termos das equações do movimento pelos termos de massa ou inércia
:

17
(12)
(13)
(14)
Onde representa a relação entre o Coeficiente de Amortecimento e o Coeficiente de
Amortecimento Crítico , e a Frequência Natural de movimento do corpo.
2.2.2 Movimentos Restaurativos
São aqueles cujas componentes restaurativas das forças dependem da forma do corpo, ou
seja, aqueles nos quais há variação do volume submerso durante o movimento. Encontram-se
neste grupo os movimentos de Heave, Roll e Pitch:
(15)
(16)
(17)
Devido à dependência da forma, coeficientes de restauração podem ser definidos como
segue:
(18)
(19)
(20)

18
Onde é a Área de Linha D’água do corpo, e
as Alturas Metacêntricas
Transversal e Longitudinal respectivamente.
A Forma Normalizada das equações anteriores é análoga àquela dos Movimentos Não
Restaurativos.
2.3 Solução das Equações Normalizadas
A solução das Equações de Movimento Normalizadas passa por suas equações
características. Dos itens anteriores, a Equação do movimento será:
(21)
Suponde que:
(22)
Da derivação em função do tempo obtêm-se:
(23)
(24)
Substituindo na Equação do Movimento:
(25)
(26)

19
Logo:
(27)
A expressão acima é uma equação do segundo grau em relação a . Resolvendo para suas
raízes:
(28)
(29)
Como:
(30)
Assim, a Equação do Movimento assumirá a seguinte forma:
(31)
Três casos em especial merecem menção. O primeiro consiste naquele onde não há
amortecimento (B = 0), e o corpo oscilará indefinidamente.
(32)
O segundo é aquele no qual , ou seja, o amortecimento experimentado pelo corpo é
maior do que o Amortecimento Crítico. Neste caso a oscilação cessará pouco após seu início. O
terceiro e último caso é aquele no qual , nomeado movimento amortecido, cuja análise
encontra-se no escopo do presente trabalho. A Frequência de Decaimento do movimento será
função da Frequência Natural de excitação do corpo:
(33)

20
2.4 Objetivo do Teste de Decaimento
O teste consiste na oscilação livre do modelo até que este pare seu movimento por
completo. A seguir um gráfico característico do movimento de um corpo, com , em
decaimento livre:
Figura 3 - Decaimento
O objetivo do teste é estimar através do gráfico do movimento. Tal pode ser feito
usando-se o Logaritmo Natural da razão entre duas amplitudes consecutivas do movimento.
Serão considerados os seguintes valores para a posição e velocidade do corpo no instante zero
(início do teste):
(34)
(35)
Duas amplitudes consecutivas são separadas por um tempo igual ao período do
movimento, assim:
-6.00E+00
-4.00E+00
-2.00E+00
0.00E+00
2.00E+00
4.00E+00
6.00E+00
8.00E+00
00
:00
.0
00
:05
.0
00
:10
.0
00
:15
.0
00
:20
.0
00
:25
.0
00
:30
.0
00
:35
.0
00
:40
.0
00
:45
.0
00
:50
.0
00
:55
.0
01
:00
.0
01
:05
.0
01
:10
.0
01
:15
.0
01
:20
.0
01
:25
.0
01
:30
.0
01
:35
.0
01
:40
.0
01
:45
.0
01
:50
.0
01
:55
.0
Ân
gulo
de
Ro
ll
Tempo
Decaimento_Roll
Y[5]

21
(36)
Desta forma, a razão entre as amplitudes será:
(37)
Sabe-se que:
(38)
Assim:
(39)
(40)
Onde é o Decremento Logarítmico da função. Desta maneira, pode-se obter
expressões para o período entre picos e :
(41)
(42)
2.5 Modelos De Amortecimento
Anteriormente na dedução das Equações de Movimento, foi assumido que o
amortecimento é uma função linear da velocidade, o que não representa fielmente os efeitos
viscosos atuantes em corpos flutuantes.

22
Corpos com regiões de grande variação de forma, como bolinas ou curvas acentuadas na
superfície dos flutuadores de uma plataforma, podem sofrer com regiões de alta pressão e com
consequentes áreas de baixa pressão, onde possivelmente o escoamento irá separar da superfície
formando vórtices. A diferença de pressão também gerará um Momento de Amortecimento que
irá se opor ao movimento. Devido à origem viscosa, tal momento terá comportamento não linear.
2.5.1 Forma Quadrática
Forma mais comumente utilizada, considera que o amortecimento é composto de dois
termos dependentes da velocidade de movimento. O termo quadrático possui um módulo, de
forma que o sentido da velocidade não altere o valor encontrado para o amortecimento:
(43)
Equação do Movimento:
(44)
2.5.2 Forma Cúbica
Consiste em modelar o Amortecimento como dependente cubicamente da velocidade:
(45)
Equação do Movimento:
(46)

23
2.6 Análise do Amortecimento
Os métodos apresentados a seguir têm por objetivo obter os coeficientes e
anteriormente explicitados.
2.6.1 Método do Decremento Logarítmico
O decremento logarítmico foi previamente apresentado na seção 2.4, e com ajustes pode
ser utilizado na determinação dos coeficientes do amortecimento. Considere a equação
normalizada de um movimento arbitrário a seguir, com força ou momento de excitação na forma
senoidal:
(47)
Temos então que o movimento apresentará forma senoidal, e pode ser representado na
forma que segue:
(48)
(49)
(50)
(51)
A equação anterior pode ser resolvida através de uma Série de Fourier, como segue:
(52)
Quando :
(53)

24
Logo:
(54)
Assim, a equação do movimento assumirá a seguinte forma:
(55)
Para o caso do decaimento em estudo ,assim, igualando a equação anterior e
a forma normalizada da Equação do Movimento:
(56)
(57)
Seja
a amplitude do movimento em seu n-ésimo ciclo:
(58)
representa o Coeficiente de Amortecimento a cada ciclo, assim:
(59)
Reescrevendo em função do Período entre as amplitudes e do movimento:
(60)
(61)

25
Desta forma, e poderão ser estimados plotando-se o gráfico
, e ajustando os dados linearmente pelo Método dos Mínimos
Quadrados.
2.6.2 Método da Energia
O método consiste em analisar o Balanço Energético entre ciclos do movimento, de
forma a determinar a energia dissipada e o trabalho das Forças Restauradoras.
De maneira diferente do método anterior, o presente utilizará ajustes quadráticos ou
cúbicos na análise dos dados.
A energia dissipada a cada ciclo do movimento pelo amortecimento pode ser escrita
como:
(62)
Integrando no tempo (t):
(63)
Se assumirmos o movimento como harmônico, e substituindo
na equação anterior:
3 1+ 22 3 (64)
Substituindo
na equação anterior, onde representa a média entre as
amplitudes consecutivas do movimento e :

26
Utilizando Séries de Fourier de maneira análoga àquela do item 2.6.1 para solucionar o
termo , e resolvendo a integral:
(65)
Os dois primeiros termos da equação acima representam o ajuste quadrático na análise
dos dados, enquanto que a inclusão do terceiro termo caracteriza o ajuste cúbico. Foi assumido
que a frequência amortecida é muito próxima da frequência natural do movimento, resultando na
substituição entre e .
O trabalho realizado pelas forças restauradoras pode ser escrito como:
(66)
Utilizando a identidade , e substituindo na
equação acima, temos:
(67)
Onde .
Igualando e :
(68)
(69)

27
Os valores dos coeficientes e podem então ser determinados pela plotagem do
gráfico x , com o ajuste dos dados através do método escolhido (quadrático ou
cúbico).
Os valores fornecidos com ambos os ajustes pelo Método da Energia são muito próximos,
ou seja, com pequena dispersão. Assim, tais valores são mais confiáveis quando comparados
àqueles fornecidos pelos demais métodos.
2.6.3 Método do Amortecimento Equivalente
Consiste na modelação do amortecimento como função da Amplitude Média de
Decaimento ( ) :
(70)
Considera-se então que a energia dissipada pelo amortecimento equivalente é igual
àquela dissipada pelo amortecimento através do Método da Energia, com ajuste não linear.
Assim, para o ajuste quadrático:
(71)
O valor acima foi obtido através do uso dos primeiros termos da Série de Fourier para o
ajuste quadrático.
Os valores de e serão então obtidos através da plotagem do gráfico e
conseguinte ajuste da reta cujos coeficientes Linear e Angular serão e .
Capítulo 3
3.1 Roll
Fornecida uma pequena quantidade de informações sobre a embarcação, é possível prever
e analisar movimentos de Heave, Pitch, Yaw e Sway com grande grau de precisão. Porém o
mesmo não pode ser dito sobre o movimento de Roll, o qual é altamente sensível aos efeitos
viscosos.

28
O Roll é uma das mais importantes respostas de uma embarcação em ondas, podendo ser
determinado com base na análise dos momentos atuantes, inércias de massas (tanto real quanto
adicional), momentos de amortecimento e restauradores, excitação das ondas e etc. Dentre todos
os citados, o Momento de Amortecimento em Roll (Roll Damping Moment) é o de maior
importância, e aquele que deve ser corretamente previsto. Seu valor é importante não somente
nos estágios iniciais de um projeto, mas também para assegurar a estabilidade e segurança de
uma embarcação.
As dificuldades em prever o movimento de Roll advém de suas características não
lineares, devidas à viscosidade do fluído da qual depende, bem como de sua dependência da
velocidade de avanço da embarcação.
3.2 Representação Dos Coeficientes De Roll
Diversos meios de representar tais coeficientes são usados na literatura sobre o assunto,
dependendo de fatores tais como: Linearidade ou não do amortecimento em Roll, qual forma das
expressões não lineares é utilizada para representar o movimento e através de qual método
experimental tais coeficientes foram obtidos, como por exemplo, testes de Roll forçado ou de
decaimento livre.
A seguir são apresentados alguns métodos de representação dos coeficientes.
3.2.1 Coeficientes Não Lineares
Se levado em conta o acoplamento entre movimentos de rotação da embarcação (Yaw,
Sway e Roll), a equação do movimento possuirá 3 graus de liberdade. Com o intuito de
simplificar a discussão, tal acoplamento será negligenciado, o que resultad na equação a seguir,
análoga àquelas já apresentadas no item 2.2 deste relatório:
(72)
Onde:
Ângulo de Roll
Coeficiente de Massa Virtual em Roll (Inércia Rotacional + Inércia Adicional)?

29
Coeficiente de Amortecimento em Roll
Coeficiente de Restauração em Roll
Momento de Excitação
O coeficiente de restauração normalmente é igual a , onde representa o
deslocamento do navio e sua Altura Metacêntrica. Considerando o amortecimento como não
linear:
(74)
Embora os valores dos coeficientes possam depender de da amplitude do
movimento e da frequência de excitação , estes serão considerados constantes.
Analogamente ao item 2.2, a Forma Normalizada da equação do movimento é obtida
dividindo-se os termo pela Massa Virtual (Inércia Rotacional + Inércia Adicional):
(75)
Onde:
Um termo pode ser incluído no lado direito da equação dos coeficientes , de
modo a representar o efeito da tensão superficial da água, porém tal efeito somente é importante
em testes de modelos em escala durante a fase de pequenas oscilações do movimento, e depende
fortemente da pintura utilizada.
3.2.2 Coeficientes Equivalentes
Devido à dificuldade de análise de equações não lineares, o coeficiente de amortecimento
é substituído por um coeficiente de amortecimento equivalente linearizado:
(76)

30
O método usual de obtenção de consiste em assumir que a energia perdida a cada
meio ciclo do movimento é a mesma para o caso do amortecimento linear e não linear. Assim,
considerando o movimento como harmônico e utilizando a teoria desenvolvida no Item 2.6.2
(Método da Energia):
(77)
Igualando as perdas de energia:
(78)
Para conveniência de análise, seguem os coeficientes adimensionais:
(79)
(80)
(81)
Onde representa a densidade do fluído, a boca da embarcação e seu deslocamento.
Assim, a equação do Coeficiente Equivalente de Amortecimento em Roll assume a
seguinte forma:
(82)
Analogamente ao coeficiente de amortecimento, pode-se representar a equação do
movimento em termos do Momento de Inércia de Massa equivalente (Equivalent Linear
Damping Coefficient Per Unit Mass Moment of Inertia), dividindo-se por :
(83)

31
Como tais coeficientes apresentam forma dimensional (com exceção de ), seguem os
adimensionais:
(84)
(85)
Para o caso de mares irregulares, com consequente Roll irregular, outra aproximação
torna-se necessária. Negligenciando o termo por simplicidade, define-se uma discrepância
entre na forma:
(86)
Pode-se então minimizar a expectância deste termo assumindo que a variação da
velocidade angular de Roll é sujeita a um processo Gaussiano, e que os coeficientes
permanecem constantes:
(87)
(88)
Onde representa a variância da velocidade angular de Roll.
O método mais usual de obter os coeficientes não lineares de Roll em testes de oscilação
forçada é, primeiramente, obter o coeficiente linear equivalente através da equação
assumindo que o sistema encontra-se sujeito a forças lineares e, então, igualar o
resultado à equação
para múltiplos valores de
amplitude do movimento.
3.2.3 Coeficientes de Extinção
Em um teste de decaimento em Roll, o modelo é inclinado até um ângulo inicial
escolhido e então solto para oscilar livremente. O valor da amplitude de movimento é então

32
denotado por e medido a cada oscilação. A então chamada Curva de Extinção expressa o
decaimento de como função do ângulo médio de Roll em graus.
Através de Froude e Baker, tal curva é aproximada por um polinômio do terceiro grau,
como segue:
(89)
Onde:
A relação entre os coeficiente de extinção pode ser determinada pela derivação
da equação do movimento em Roll, sem o termo de excitação externa, durante meio período de
oscilação e, então, equacionar a perda de energia durante este meio ciclo. O resultado destes
cálculos pode ser visto a seguir, em radianos:
(90)
Comparando as equações anteriores, pode-se chegar ao seguinte resultado:
(91)
Vale resaltar que a condição de validação das equações acima é a independência dos
coeficientes de amortecimento de movimento da amplitude de movimento.
É razoável definir um coeficiente de extinção equivalente, e compará-lo com o
coeficiente equivalente de amortecimento:
(92)

33
3.3 Métodos de Previsão de Roll
Quando as dimensões da embarcação são conhecidas, o método mais confiável de
obtenção dos coeficientes de Roll é através de testes com modelos em escala, com posterior
aplicação dos resultados. Quando tais dados não estão disponíveis, torna-se necessária a
aplicação de outros métodos.
O primeiro consiste no uso de modelos semelhantes à embarcação pretendida, de modo a
obter fórmulas empíricas. O segundo consiste na quebra do amortecimento em Roll em diversos
componentes e, então, estimar o valor real através da soma destas partes.
Os métodos desenvolvidos a partir de modelos de embarcações, como o de Watanabi-
Inoue-Takashi e a Tabela de Tasai-Takaki não serão apresentados, uma vez que o escopo do
presente relatório é a análise de movimentos de plataformas, e resultados advindos de
experimentos com modelos de navios não serão aplicáveis.
3.3.1 Decomposição do Amortecimento
O fenômeno do amortecimento se deve a diversos fatores, tais como a fricção entre fluído
e superfície exposta, descolamento do fluído em áreas de maior variação de forma, ondas de
superfície geradas e etc.
É notável também o fato de que o amortecimento é fortemente influenciado pela presença
de apêndices no casco, como leme e bolinas (bilge Keels).
Pode-se assumir que o amortecimento é composto de 7 componentes independentes:
Fricção, Vórtices, Lift, ondas e outras 3 componentes devidas às forças normais presentes nas
bolinas, pressão no casco devida às quilhas de bojo e ondas geradas por elas.
(93)
Tais componentes são definidas como segue, negligenciando ou não suas mútuas
interações.

34
3.3.2 Amortecimento por Fricção
Causado pela fricção na superfície em contato com o fluído, quanto este se desloca
paralelamente à ela, podendo ser influenciado pela presença de ondas e quilhas de bojo.
Na previsão de seu valor, o corpo é suposto simétrico e, então, são aplicadas as fórmulas
para o escoamento sobre uma placa plana para um fluxo totalmente desenvolvido (Fórmula de
Blausius para fluxo laminar e de Hughes para escoamento turbulento):
(94)
Onde:
= Amplitude do movimento [Rad];
= Densidade do fluido;
= Viscosidade cinemática;
= Superfície molhada do casco;
Raio médio de Roll;
Altura do centro de gravidade.
O primeiro termo entre parêntesis na equação anterior fornece o resultado para o caso de
escoamento laminar, o qual é usado para o modelo sem apêndices, enquanto o segundo termo
fornece a variação para o caso turbulento de acordo com a formulação de Hughes, aplicável ao
modelo com apêndices e ao casco real.
Mais recentemente, experimentos envolvendo cilindros em movimento de Roll com
analise mais rigorosa das camadas limites tridimensionais forneceram a seguinte fórmula para o
coeficiente de amortecimento na presença de velocidade de avanço:
(95)
Onde pode ser determinado pela primeira equação.
É digno de nota que a razão de escala entre modelo e protótipo afeta o resultado
encontrado para o amortecimento por fricção. Os valores encontrados para o protótipo são
inversamente proporcionais a , ou seja, tais valores serão entre 1/20 e 1/30 menores do que
aqueles medidos nos modelos, e podem ser ignorados.

35
3.3.3 Amortecimento Por Vórtices e Lift
Na ausência de velocidade de avanço, o amortecimento por vórtices representa a
componente não linear causada pela variação de pressão no casco devida ao descolamento do
fluído e aparecimento de vórtices. Na presença de velocidade de avanço, representará a parte não
linear do amortecimento Lift do casco em Roll.
Através de experimentos em cilindros 2D em Roll, a seguinte fórmula foi proposta:
(96)
Onde:
Calado da embarcação;
Distância máxima do ponto de origem (o) até a superfície do casco;
Raio do Bojo;
Metade da relação entre Boca e Pontal;
Coeficiente de área da seção;
Altura do centro de gravidade da seção;
; (97)
Onde:
; (98)
; (99)
; (100)
Onde:
Razão de Incremento de
Velocidade; (101)
Onde:

36
; (102)
; (103)
(104)
(105)
(106)
(107)
Com isso, obtêm-se o valor do coeficiente de amortecimento por vórtices para a dada
seção, e através da integração ao longo do casco, o coeficiente total.
Na presença de velocidade de avanço, é percebida uma diminuição no valor do presente
amortecimento, dependente da forma do corpo. Para formas arbitrárias de casco, a seguinte
fórmula é utilizada:
(108)
Desta forma, o amortecimento por vórtices prevalece somente na ausência de velocidade
de avanço.
Uma vez em movimento, um novo tipo de amortecimento se faz presente: o
amortecimento por Lift. O momento de amortecimento por Lift pode ser expresso como segue:
(109)
Onde:
; (110)

37
(111)
denota o coeficiente de seção mestra da embarcação. A alavanca é definida de
modo que corresponda ao ângulo de incidência entre o fluído e o corpo sobre o qual o
lift atua, e a alavanca corresponde à distância da origem do sistema até o ponto de ação da
força de Lift.
De modo a cobrir os casos onde o eixo de ação do Lift não passa pela origem do sistema,
a seguinte modificação foi proposta:
(112)
Onde:
d = Calado da embarcação
Para se obter tais valores empiricamente, deve-se excluir os efeitos de onda através da
instalação de placas planas na linha d’água do modelo, ou realizando o experimento em baixas
frequências, de modo que o amortecimento pela geração de ondas possa ser ignorado.
Através de experimentos deste tipo, pode-se concluir que o amortecimento por Lift é
independente de , e proporcional à velocidade de avanço da embarcação, podendo se tornar a
componente mais significativa para navios com formas semelhantes à porta contêineres e
petroleiros com velocidade de avanço. Finalmente deve-se notar que as formulações
apresentadas para o amortecimento por Lift não abrangem todas as formas de casco, falhando em
casos de pequena relação , tendo em vista que foi considerado que o Lift sofrido
pelas embarcações será aproximadamente igual àquele sofrido por uma placa plana com os
mesmos valores de comprimento e calado.
3.3.4 Amortecimento por Ondas
O cálculo do amortecimento por ondas é feito para cada seção do navio através de um
problema de ondas 2D sem velocidade de avanço, e o valor calculado deve ser integrado ao
longo do comprimento do casco.

38
(113)
Onde:
Coeficiente de amortecimento em Sway;
Braço de alavanca entre a origem do sistema e o ponto de aplicação da Força de
Sway.
O tratamento teórico do Amortecimento por Ondas em Roll na presença de velocidade de
avanço é consideravelmente difícil de ser realizado, porém, um valor aproximado pode ser
obtido com a subtração de todos os valores de amortecimentos previsíveis do valor medido para
o amortecimento em testes de Roll forçado.
Dentre os modelos de tratamento teórico propostos para o amortecimento por ondas com
velocidade de anvanço, os seguintes sobressaem:
Ikeda: Medição da perda de energia e comparação com experimentos de placas planas
combinadas:
(114)
Onde:
(115)
(116)
(117)
(118)
Os dados obtidos através deste método mostram um aumento considerável no
amortecimento por ondas perto de .
Hanaoka: O corpo em Roll é considerado como um corpo em Lift, e o sistema de ondas
gerado é resolvido. A equação para uma placa plana de baixa razão de aspecto em Roll é
mostrada a seguir, como a soma das componentes de Lift e Ondas:
(119)

39
Esta teoria mostra resultado semelhante ao redor de e aumento do
amortecimento com o aumento de .
Embora ambas as teorias sejam aplicáveis, ambas apresentam problemas: A de Hanaoki é
calculada para uma placa plana, e não um corpo em formato de casco, e a de Ikeda apresenta
menor precisão para cascos com menores razões calado/boca.
3.3.5 Amortecimento nas Bolinas
As bolinas, assim como o restante do casco, geram três diferentes tipos de
amortecimentos. O primeiro advém da geração de ondas que estas causam, o segundo da geração
de vórtices devida à diferença de pressão entre as faces superior e inferior das bolinas, e a
terceira à fricção em suas faces.
Tais componentes não serão levadas em conta na análise, uma vez que não há bolinas na
plataforma em questão.

40
4 Simulação
4.1 Modelo
O modelo a ser analisado será a Semi Submersível ITTC SR192, com as dimensões
mostradas abaixo. Foi optado por projetar o modelo numérico nas dimensões do modelo
ensaiado no LabOceano, uma vez que a extrapolação dos resultados para o tamanho real de uma
plataforma offshore somente multiplicaria os possíveis erros.
Figura 4 - Dimensões do Modelo (metros)
Dados:
Centro de Gravidade: ;
Altura Metacêntrica Longitudinal: ;
Altura Metacêntrica Transversal: ;
Deslocamento na água doce:
Raios de Giração:
Pitch = 0.556 m

41
Yaw = 0.634 m
Roll = 0.536 m
As inércias rotacionais foram obtidas à partir da seguinte fórmula:
(120)
O sistema de coordenadas utilizado é o que segue:
Eixo X: da ré para vante;
Eixo Y: de Estibordo para Bombordo;
Eixo Z: vertical;
Origem do sistema: Seção mestra da embarcação, na Linha de Centro.
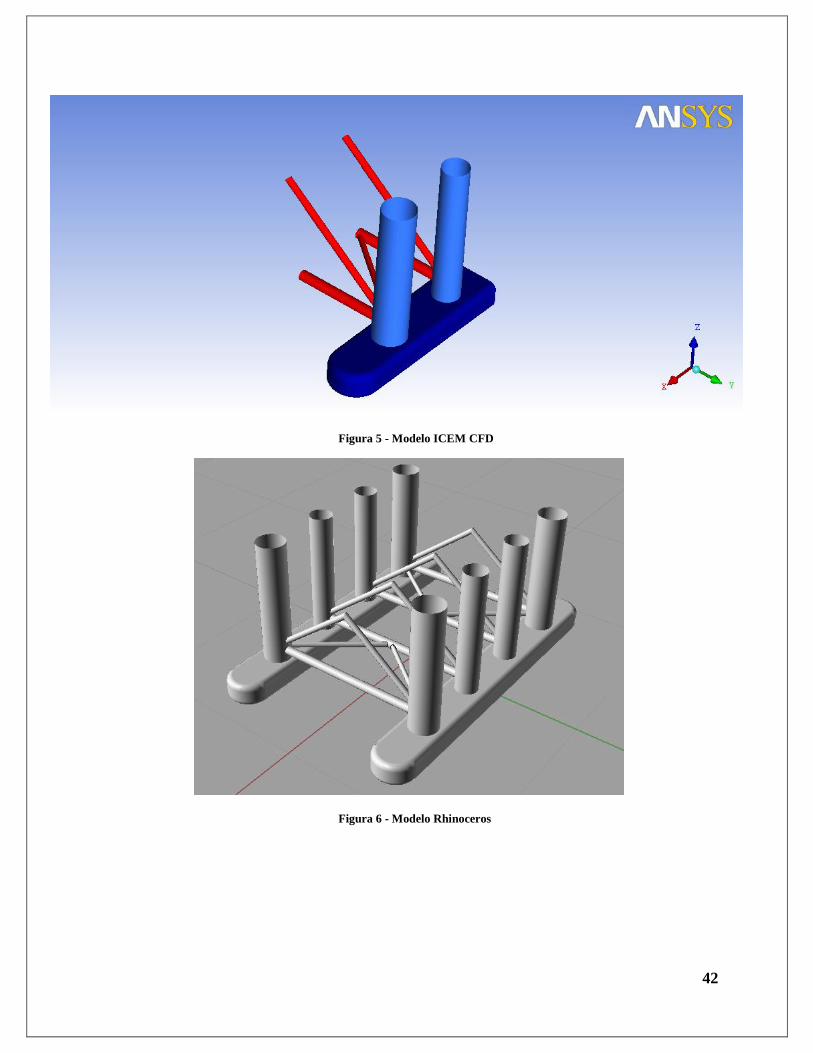
A modelação inicial ocorreu no software ICEM CFD, onde um quarto da plataforma foi
modelada. O modelo foi, então, exportado no formato IGES para o software Rhinoceros, onde os
cortes e demais partes da plataforma foram gerados. Com os dados exportados no mesmo
formato para o Ansys Workbench, a malha foi feita com as seguintes características:
Máximo desvio da superfície: 0.02m
Máximo tamanho de elemento: 0.05m
Número de Elementos: 8516
Número de Nós: 8324
42
Figura 5 - Modelo ICEM CFD
Figura 6 - Modelo Rhinoceros

43
Figura 7 - Modelo AQWA com cortes no calado
O LabOceano tem capacidade de gerar ondas entre 0.5 e 5 segundo de período. De modo
a obter um maior número de dados para os coeficientes, o modelo AQWA foi ensaiado para uma
faixa mais ampla (0.5 a 20 segundos).
Os gráficos gerados podem ser vistos no Anexo II deste relatório.
4.1.1 Amotecimento por Geração de Ondas
O modelo foi ensaiado para decaimento (sem ondas incidentes) em um tempo máximo de
1200 segundos. O gráfico gerado pode ser visto a seguir:

44
Figura 8- Teste de decaimento com amortecimento potencial
Como pode ser visto, durante o teste não é visto nenhum decaimento expressivo do
movimento, levando à conclusão de que o amortecimento potencial (geração de ondas) para a
estrutura analisada não é relevante.
4.1.2 Ensaio em Ondas (AQWA)
As ondas analisadas são as mesma às quais o modelo do LabOceano foi submetido:
Onda 1 (través)
Período = 2.69 s
Amplitude = 7.58 cm = 0.078 m
Onda 2 (través)
Período = 3.21 s
Amplitude = 7.69 cm = 0.079 m
Os gráficos gerados podem ser visto ao final do relatório, Anexo II.
4.2.1 Teste de Decaimento No LabOceano são realizados apenas testes de decaimento com oscilação livre, com o
modelo posicionado no centro do tanque principal. As dimensões do tanque permitem que vários

45
ciclos de decaimento sejam realizados antes que ondas geradas pelo modelo reflitam nas paredes,
retornando em direção ao mesmo, interferindo nas medições. Os testes são realizados em baterias
de três repetições para cada condição de equilíbrio analisada. Os dados de cada bateria são então
condensados em um único bloco, de forma a determinar o amortecimento do modelo em questão,
ou podem ser analisados separadamente de forma a comparar as baterias.
Foram analisadas duas séries de dados de decaimento em roll do modelo ensaiado no
LabOceano.
Série 1
Amplitude Inicial: 5.59 graus
Período Médio: 7.131 segundos
Figura 9 - Gráfico do Decaimento em Roll - Série 1
Os dados anteriores foram utilizados para realizar o ajuste linear da reta do Decremento
Logarítmico, de acordo com o item 2.6.1 deste relatório.
-6.00E+00
-4.00E+00
-2.00E+00
0.00E+00
2.00E+00
4.00E+00
6.00E+00
8.00E+00
00
:00
.0
00
:04
.5
00
:09
.0
00
:13
.4
00
:17
.9
00
:22
.4
00
:26
.9
00
:31
.4
00
:35
.8
00
:40
.3
00
:44
.8
00
:49
.3
00
:53
.8
00
:58
.2
01
:02
.7
01
:07
.2
01
:11
.7
01
:16
.2
01
:20
.6
01
:25
.1
01
:29
.6
01
:34
.1
01
:38
.6
01
:43
.0
01
:47
.5
01
:52
.0
01
:56
.5
Y[5]

46
Figura 10 - Gráfico do Decremento Logarítmico X Amplitude - Série 1
Figura 11 - Ajuste Linear - Série 1
Assim, os coeficientes do amortecimento possuem os seguintes valores para o decaimento
analisado de acordo com o ajuste linear do decremento logarítmico:
0.1732
0.0648
0 0.05
0.1 0.15
0.2 0.25
0.3 0.35
0.4
3.9
2
3.3
5
2.9
1
2.4
9
2.1
7
1.8
9
1.6
9
1.4
8
1.3
1
1.1
4
1.0
1
0.8
87
0.7
72
0.6
84
Amplitude
Série1
y = 0.1732x + 0.0648
0
0.5
1
1.5
2
2.5
3
3.5
0.0
36
5
0.0
33
7
0.0
38
7
0.0
36
2
0.0
33
7
0.0
38
7
0.0
34
0
0.0
37
0
0.0
31
2
0.0
38
5
0.0
38
3
0.0
43
4
0.0
39
2
0.0
43
8
(2/Tm)*LN(Xn/Xn+1)
Série1
Ajuste Linear

47
À partir da equação (59):
Coeficiente de Amortecimento por Ciclo
Figura 12 - Gráfico Coeficiente de Amortecimento X Amplitude de Movimento – Série 1 – Método do Decremento
Pelo Método da Energia:
Ajuste Quadrático
Figura 13 - Método da Energia com Ajuste Quadrático - Série 1
0.0031
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
4.8
5
3.9
2
3.3
5
2.9
1
2.4
9
2.1
7
1.8
9
1.6
9
1.4
8
1.3
1
1.1
4
1.0
1
0.8
87
0.7
72
0.6
84
0.6
Amplitudes
B0 Série 1
y = 0.0031x2 + 0.0019x
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.6
4
0.7
3
0.8
3
0.9
5
1.0
8
1.2
3
1.4
1.5
9
1.7
9
2.0
3
2.3
3
2.7
3.1
3
3.6
4
4.3
9
Xn
- X
n+1
Amplitude Média
Série1
Ajuste Quadrático

48
0.0019
Ajuste Cúbico
Figura 14 - Método da Energia com Ajuste Cúbico - Série 1
0.0734
-0.0124
0.0007
y = 0.0007x3 - 0.0124x2 + 0.0734x
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
1
0.6
4
0.7
3
0.8
3
0.9
5
1.0
8
1.2
3
1.4
1.5
9
1.7
9
2.0
3
2.3
3
2.7
3.1
3
3.6
4
4.3
9
Xn
- X
n+1
Amplitude Média
Série1
Ajuste Cúbico

49
À partir dos ajustes cúbico e quadrático, os seguintes gráficos foram gerados para o
amortecimento total:
Figura 15- Amortecimento Total - Série 1 - Método da Energia - Ajuste Quadrático
Figura 16 - Amortecimento Total - Série 1 - Método da Energia – Ajuste Cúbico
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
5.5
9
4.8
5
3.9
2
3.3
5
2.9
1
2.4
9
2.1
7
1.8
9
1.6
9
1.4
8
1.3
1
1.1
4
1.0
1
0.8
87
0.7
72
Amplitudes
B0_quad
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
5.5
9
4.8
5
3.9
2
3.3
5
2.9
1
2.4
9
2.1
7
1.8
9
1.6
9
1.4
8
1.3
1
1.1
4
1.0
1
0.8
87
0.7
72
Amplitudes
B0_cúbico

50
Figura 17- Comparativo entre métodos - Amortecimento Total – Série 1
Série 2
Amplitude Inicial: 5.13 graus
Período Médio: 7.18 segundos
Figura 18 - Gráfico do Decaimento em Roll - Série 2
0.0000
0.0500
0.1000
0.1500
0.2000
0.2500
0.3000
0.3500
0.4000
0.4500
0.5000
5.5
9
4.8
5
3.9
2
3.3
5
2.9
1
2.4
9
2.1
7
1.8
9
1.6
9
1.4
8
1.3
1
1.1
4
1.0
1
0.8
87
0.7
72
Amplitudes
Método da Energia (Ajuste Cúbico)
Método do Decremento Logarítmico
Método da Energia Ajuste Quadrático
-8.00E+00
-6.00E+00
-4.00E+00
-2.00E+00
0.00E+00
2.00E+00
4.00E+00
6.00E+00
00
:00
.0
00
:04
.3
00
:08
.6
00
:13
.0
00
:17
.3
00
:21
.6
00
:25
.9
00
:30
.2
00
:34
.6
00
:38
.9
00
:43
.2
00
:47
.5
00
:51
.8
00
:56
.2
01
:00
.5
01
:04
.8
01
:09
.1
01
:13
.4
01
:17
.8
01
:22
.1
01
:26
.4
01
:30
.7
01
:35
.0
01
:39
.4
01
:43
.7
01
:48
.0
01
:52
.3
01
:56
.6
Y[5]

51
t (s) Amplitudes
(graus) Decremento Logrítmico
6.2 5.13 13.3 4.09 0.385203923
20.5 3.49 0.299982351 27.7 3.03 0.275342096 35 2.65 0.262694352
42.2 2.33 0.256719847 49.4 2.05 0.247031766 56.6 1.82 0.247836164 63.6 1.6 0.255246797 71 1.41 0.246860078
77 1.25 0.239229689 85.4 1.11 0.249487527 92.3 0.974 0.247076318 99.6 0.867 0.296619911
106.9 0.724 0.283461848 113.9 0.653
Figura 19 - Gráfico do Decremento Logarítmico - Série 2
0
0.05
0.1
0.15
0.2
0.25
0.3
0.35
0.4
0.45
Amplitude
Série1

52
Figura 20 - Ajuste Linear - Série 2
Assim:
0.1786
0.1137
À partir da equação (59):
Coeficiente de Amortecimento por Ciclo
Figura 21 - Gráfico Coeficiente de Amortecimento X Amplitude de Movimento - Série 2 – Método do Decremento
y = 0.1786x + 0.1137
0
0.5
1
1.5
2
2.5
3
3.5
0.0
79
0.0
83
0.0
69
0.0
70
0.0
67
0.0
69
0.0
71
0.0
69
0.0
69
0.0
72
0.0
73
0.0
77
0.0
84
0.1
07
Série1
Ajuste Linear
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
5.1
3
4.0
9
3.4
9
3.0
3
2.6
5
2.3
3
2.0
5
1.8
2
1.6
1.4
1
1.2
5
1.1
1
0.9
74
0.8
67
0.7
24
0.6
53
0.6
Amplitudes
B0 Série 2

53
Pelo Método da Energia:
Ajuste Quadrático
Figura 22 - Método da Energia com Ajuste Quadrático - Série 2
Ajuste Cúbico
Figura 23 - Método da Energia com Ajuste Cúbico - Série 2
y = 0.0038x2 + 0.0027x
0.000
0.200
0.400
0.600
0.800
1.000
1.200
0.6
89
0.7
96
0.9
21
1.0
42
1.1
80
1.3
30
1.5
05
1.7
10
1.9
35
2.1
90
2.4
90
2.8
40
3.2
60
3.7
90
Xn
- X
n+1
Amplitude Média
Série1
Ajuste Quadrático
y = 0.0012x3 - 0.0191x2 + 0.1019x
0.000
0.200
0.400
0.600
0.800
1.000
1.200
0.6
89
0.7
96
0.9
21
1.0
42
1.1
80
1.3
30
1.5
05
1.7
10
1.9
35
2.1
90
2.4
90
2.8
40
3.2
60
3.7
90
Xn
- X
n+1
Ampltude Média
Série1
Ajuste Cúbico
54
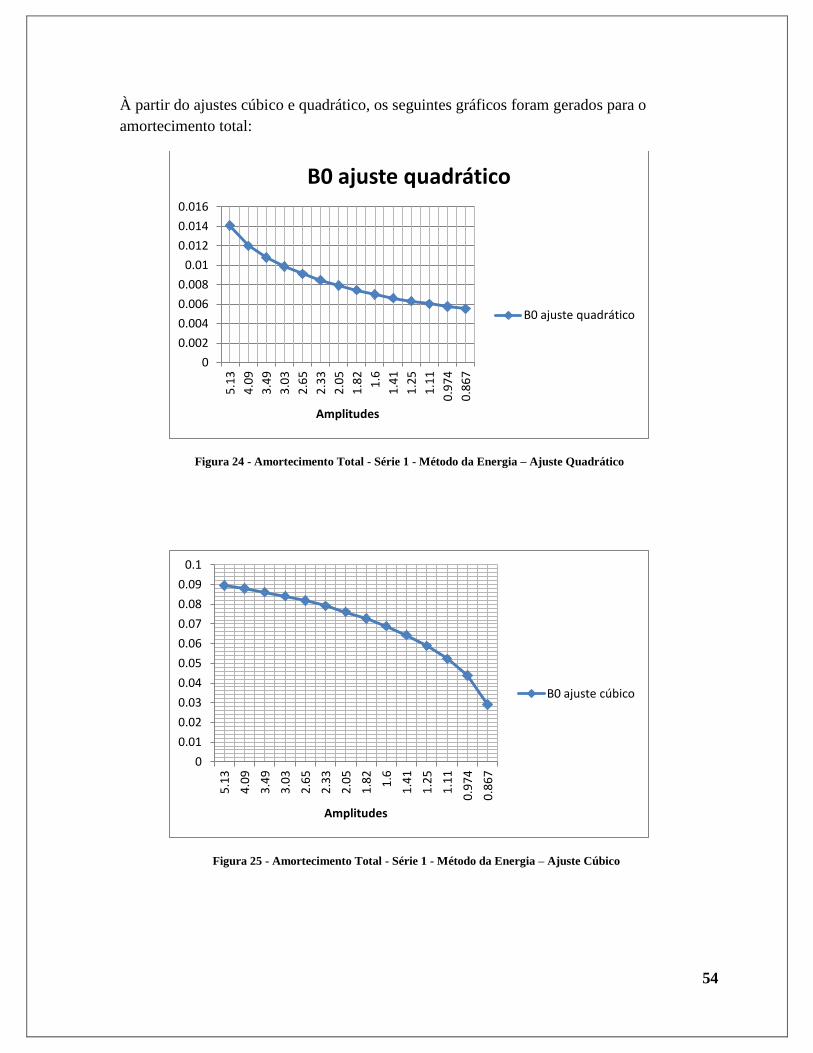
À partir do ajustes cúbico e quadrático, os seguintes gráficos foram gerados para o
amortecimento total:
Figura 24 - Amortecimento Total - Série 1 - Método da Energia – Ajuste Quadrático
Figura 25 - Amortecimento Total - Série 1 - Método da Energia – Ajuste Cúbico
0
0.002
0.004
0.006
0.008
0.01
0.012
0.014
0.016
5.1
3
4.0
9
3.4
9
3.0
3
2.6
5
2.3
3
2.0
5
1.8
2
1.6
1.4
1
1.2
5
1.1
1
0.9
74
0.8
67
Amplitudes
B0 ajuste quadrático
B0 ajuste quadrático
0
0.01
0.02
0.03
0.04
0.05
0.06
0.07
0.08
0.09
0.1
5.1
3
4.0
9
3.4
9
3.0
3
2.6
5
2.3
3
2.0
5
1.8
2
1.6
1.4
1
1.2
5
1.1
1
0.9
74
0.8
67
Amplitudes
B0 ajuste cúbico

55
Figura 26 - Comparativo entre métodos - Amortecimento Total – Série 2
4.2.2 Teste em Ondas Regulares
Um total de dois testes em onda do modelo ensaiado no tanque do LabOceano foram
analisados. Todas as ondas a seguir analisadas são de través (90 graus).
Ensaio em Ondas 1
Figura 27 - Gráfico de ondas medidas no modelo em função do tempo – Ensaio 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
5.1
3
4.0
9
3.4
9
3.0
3
2.6
5
2.3
3
2.0
5
1.8
2
1.6
1.4
1
1.2
5
1.1
1
0.9
74
0.8
67
Amplitudes
Método da Energia (Ajuste Cúbico)
Método do Decremento Logarítmico
Método da Energia (Ajuste Quadrático)
-1.00E+01
-5.00E+00
0.00E+00
5.00E+00
1.00E+01
00
:00
.0
00
:02
.8
00
:05
.5
00
:08
.3
00
:11
.0
00
:13
.8
00
:16
.6
00
:19
.3
00
:22
.1
00
:24
.8
00
:27
.6
00
:30
.4
00
:33
.1
00
:35
.9
00
:38
.6
00
:41
.4
00
:44
.2
00
:46
.9
00
:49
.7
00
:52
.4
00
:55
.2
00
:58
.0
Ele
vaçã
o (
Gra
us)
Tempo (s)
Elevação de Ondas no modelo
Y[2]

56
Figura 28 - Gráfico das Amplitudes medidas no modelo em função do tempo – Ensaio 1
Período Médio: 2.69s
Amplitude Média: 7.58 cm
Figura 29 - Resposta da Estrutura ao excitamento pelas ondas - Ensaio 1
Deve-se resaltar que a parte linear do gráfico corresponde ao tempo necessário, desde o
início do teste, para que as ondas atingissem o modelo, e o mesmo não será avaliado nos cálculos
do período médio e amplitude do modelo.
0
2
4
6
8
10
10.4 15.7 21.2 26.6 32 37.4 42.8 48.1 53.4 58.9
Tempo
Amplitudes Ensaio 1
Amplitudes Ensaio 1
-9.0000E-01
-8.0000E-01
-7.0000E-01
-6.0000E-01
-5.0000E-01
-4.0000E-01
-3.0000E-01
-2.0000E-01
-1.0000E-01
0.0000E+00
00
:00
.0
00
:03
.0
00
:06
.0
00
:09
.0
00
:12
.0
00
:15
.0
00
:18
.0
00
:21
.0
00
:24
.0
00
:27
.0
00
:30
.0
00
:33
.0
00
:36
.0
00
:39
.0
00
:42
.0
00
:45
.0
00
:48
.0
00
:51
.0
00
:54
.0
00
:57
.0
Ân
gulo
de
Ro
ll (g
rau
s)
Tempo (s)
Resposta da Estrutura
Roll

57
Figura 30- Amplitudes de Resposta - Ensaio 1
Amplitude Média do Movimento: -0.7689 graus
Período médio do movimento do modelo: 2.69 s
Ensaio em Ondas 2
Figura 31 - Gráfico de ondas medidas no modelo em função do tempo - Ensaio 2
-0.8
-0.79
-0.78
-0.77
-0.76
-0.75
-0.74
-0.73
16.2 21.6 26.9 32.3 37.7 43 48.5 53.9 59.3 A
mp
litu
de
(gr
aus)
Tempo (s)
Amplitudes da Estrututra
Resposta da Estrututra
-1.00E+01
-8.00E+00
-6.00E+00
-4.00E+00
-2.00E+00
0.00E+00
2.00E+00
4.00E+00
6.00E+00
8.00E+00
1.00E+01
00
:00
.0
00
:02
.9
00
:05
.8
00
:08
.6
00
:11
.5
00
:14
.4
00
:17
.3
00
:20
.2
00
:23
.0
00
:25
.9
00
:28
.8
00
:31
.7
00
:34
.6
00
:37
.4
00
:40
.3
00
:43
.2
00
:46
.1
00
:49
.0
00
:51
.8
00
:54
.7
00
:57
.6
Ele
vaçã
o (
grau
s)
Tempo (s)
Elevação de Ondas no Modelo
Y[2]

58
Figura 32 - Gráfico das Amplitudes medidas no modelo em função do tempo – Ensaio 2
Período Médio: 3.21 s
Amplitude Média: 7.69 cm
Figura 33 - Resposta da Estrutura ao excitamento pelas ondas - Ensaio 2
6.6 6.8
7 7.2 7.4 7.6 7.8
8 8.2 8.4
8.8
12
15
.2
18
.4
21
.5
24
.7
27
.9
31
.2
34
.4
37
.6
40
.8
44
.1
47
.3
50
.5
53
.7
56
.9
Tempo (s)
Amplitudes Ensaio 2
Amplitudes Ensaio 2
-1.0000E+00
-9.0000E-01
-8.0000E-01
-7.0000E-01
-6.0000E-01
-5.0000E-01
-4.0000E-01
-3.0000E-01
-2.0000E-01
-1.0000E-01
0.0000E+00
00
:00
.0
00
:03
.4
00
:06
.7
00
:10
.1
00
:13
.4
00
:16
.8
00
:20
.2
00
:23
.5
00
:26
.9
00
:30
.2
00
:33
.6
00
:37
.0
00
:40
.3
00
:43
.7
00
:47
.0
00
:50
.4
00
:53
.8
00
:57
.1
Ân
gulo
de
Ro
ll (g
rau
s)
Tempo (s)
Resposta da Estrutura
Roll

59
Figura 34 - Gráfico das Amplitudes medidas no modelo em função do tempo – Ensaio 2
Amplitude Média do Movimento: -0.859 graus
Período médio do movimento do modelo: 3.19 s
4.3 Tratamento dos Dados
O software AQWA fornece como dado de saída o amortecimento referente à Teoria
Potencial, ou seja, o amortecimento por geração de ondas de gravidade . Assim, em posse
destes dados, dos dados do modelo em escala e a equação apresentada na seção 3.3.2 para o
amortecimento friccional, é possível obter a parcela advinda do amortecimento por vórtices:
-0.9
-0.89
-0.88
-0.87
-0.86
-0.85
-0.84
-0.83
-0.82
-0.81
-0.8
20
.8
24
.1
27
.3
30
.4
33
.7
36
.8
40
43
.2
46
.4
49
.6
52
.8
56
59
.1
Am
plit
ud
es
Tempo (s)
Amplitudes da Estrutura
Resposta da Estrutura

60
Onde é o valor obtido à partir do teste com modelo em escala.
4.3.1 Cálculo do Amortecimento Friccional
A seguir será calculada a parcela friccional do amortecimento.
Da teoria explicada no item 3.3.2:
Onde:
= Amplitude do movimento [Rad];
= Densidade do fluido;
= Viscosidade cinemática;
= Superfície molhada do casco;
= Raio médio de Roll;
Altura do centro de gravidade.
Uma vez que o modelo é formado por dois pontoons, os cálculos serão realizados para um
deles e o resultado dobrado, de forma a simular o Roll de ambos os bordos da plataforma.
Dados do modelo:
= 0.988 kg/m³
m²/s
1.797 m
0.273 m
Série 1

61
Figura 65 - Gráfico Coeficiente de Amortecimento Friccional X Amplitude para ambos os Pontoons - Série 1
Série 2
Figura 76 - Gráfico Coeficiente de Amortecimento Friccional X Amplitude para ambos os Pontoons- Série 2
0.000000
0.000010
0.000020
0.000030
0.000040
0.000050
0.000060
5.5
9
4.8
5
3.9
2
3.3
5
2.9
1
2.4
9
2.1
7
1.8
9
1.6
9
1.4
8
1.3
1
1.1
4
1.0
1
0.8
87
0.7
72
0.6
84
0.6
Amplitudes
BF0
0
0.00001
0.00002
0.00003
0.00004
0.00005
0.00006
5.1
3
4.0
9
3.4
9
3.0
3
2.6
5
2.3
3
2.0
5
1.8
2
1.6
1.4
1
1.2
5
1.1
1
0.9
74
0.8
67
0.7
24
0.6
53
Amplitudes
BF0

62
Figura 87 - Gráfico Comparativo dos Coeficientes de Amortecimento Friccional para ambos os Pontoons
4.3.2 Comparação dos Amortecimentos
O gráfico a seguir foi obtido dividindo-se o Amortecimento Friccional encontrado no
item anterior para cada ensaio de decaimento pelo Amortecimento Total obtido à partir dos
ensaios de decaimento realizados no LabOceano.
Figura 98 - Gráfico Comparativo entre Amortecimento Friccional e Amortecimento Total – Ensaio 1
0
0.00001
0.00002
0.00003
0.00004
0.00005
0.00006
5.1
3
4.0
9
3.4
9
3.0
3
2.6
5
2.3
3
2.0
5
1.8
2
1.6
1.4
1
1.2
5
1.1
1
0.9
74
0.8
67
0.7
24
0.6
53
Amplitudes
BF0 serie 2
BF0 serie 1
0
0.1
0.2
0.3
0.4
0.5
0.6
0.7
0.8
0.9
B_f
ric
/ B
_0 (
%)
Amplitudes
Friccional/Método do Decremento Logarítmico
Friccional/Energia Quadrático
Friccional/ Energia Cúbico

63
Figura 109 - Gráfico Comparativo entre Amortecimento Friccional e Amortecimento Total – Ensaio 2
Como pode ser visto, o amortecimento friccional somente representa uma parcela
expressiva do amortecimento total quando utilizado o método da Energia com ajuste quadrático
dos dados experimentais.
Conclusão
Uma vez que foi definido que o Amortecimento Potencial (geração de ondas) compõe
uma parcela inexpressiva do Amortecimento Total em Roll, os únicos coeficientes que serão
levados em conta são o do Amortecimento Friccional e Total.
Como calculado no item anterior, o Amortecimento Friccional compõe, no máximo, 1%
do amortecimento total experimentado pela estrutura, assim, 99% do mesmo se deve à parcela
viscosa.
0
0.1
0.2
0.3
0.4
0.5
0.6
B_F
ric
/ B
_0 (
%)
Amplitude
Friccional/ Método do Decremento Logarítmico
Friccional/ Energia Cúbico
Friccional/ Energia Quadrático

64
Anexo I
Dados gerados pelo modelo AQWA:
Hidrostáticas

65
Anexo II
Gráficos gerados pelo modelo AQWA
Radiation Damping, Global X (Force/Moment x Frequency)
Added Mass, Global X (Force/Moment x Frequency)

66
Added Mass, Global RX (Force/Moment x Frequency)
Difraction + Froude Krylov (Force/Moment x Direction)

67
RAO (RX), 90 degrees (Distance/Rotation x Period)
RAO (RX), 45 degrees (Distance/Rotation x Period)

68
Ensaio em Ondas 1
Período = 2.69 s
Amplitude = 0.0758 m
Structure Position, Actual Response RX (Force/Moment vs Time)
Structure Position, RAO Based Response RX (Force/Moment vs Time)

69
Structure Velocity, Actual Response RX (Velocity vs Time)
Ensaio em Ondas 2
Período = 3.19 s
Amplitude = 0.086 m
Structure Position, Actual Response RX (Force/Moment vs Time)

70
Structure Position, RAO Based Response RX (Force/Moment vs Time)
Structure Velocity, Actual Response RX (Velocity vs Time)
Referências
(1) A Comparison Of Methods For Calculating The Motions Of a Semisubmersible,
Matao Takagi, Shin-Ichi Arai , Seiji Takezawa, Kunio Tanaka, Naonosuke Takarada;
(2) Prediction Of Ship Roll Damping – State Of The Art, Yoji Himeno;
(3) Offshore Hydromechanics, J.M.J. Journée and W.W. Massie
Recommended

















