VektorrechnungUnterrichtsinhalte und Beispiele
Olaf Schimmel
1 Grundlegende Vektoroperationen
1.1 Der (geometrische) Begriff des Vektors
Definitionen:
Def 1.1
Die Klasse aller gerichteten Strecken, die die gleiche Länge, die gleiche Richtung unddie gleiche Orientierung besitzen, heißt Vektor.
Schreibweisen sind: ~a,−→AB.
Def 1.2
Jede einzelne gerichtete Strecke, heißt Repräsentant des Vektors.
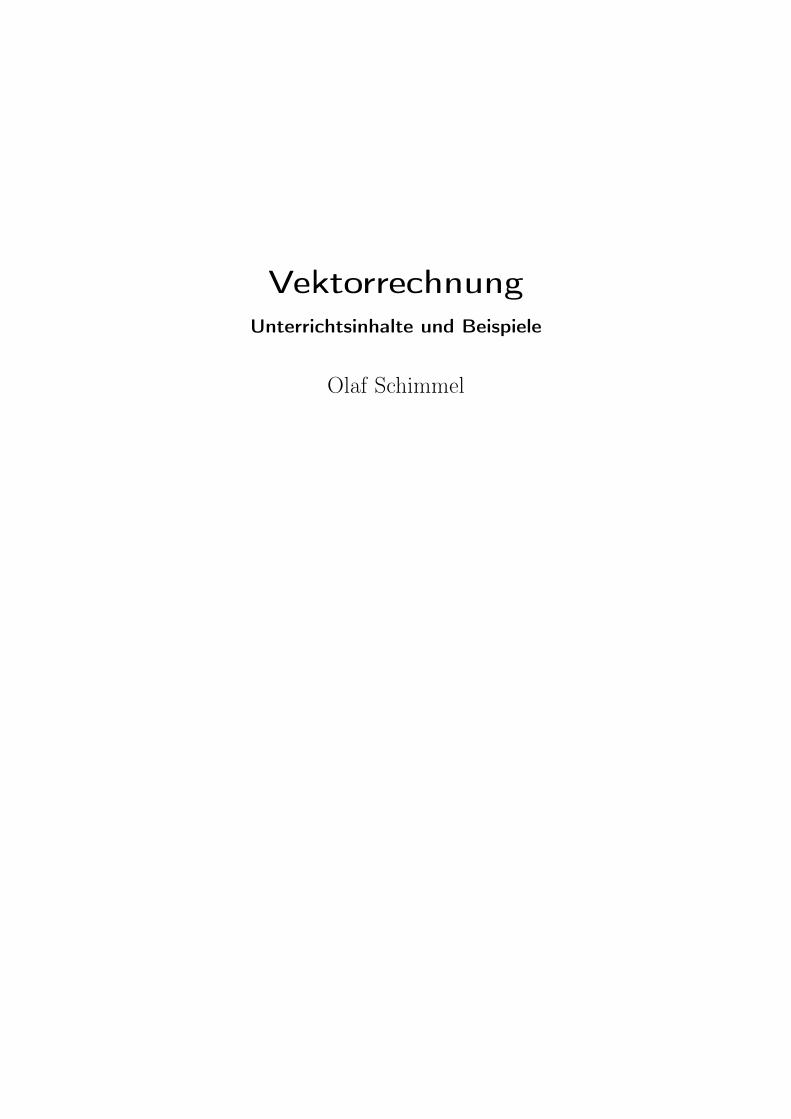
Abb. 1
Drei Repräsentanten desselben Vektors ~a
Def 1.3
Der Zahlenwert der Länge eines Repräsentanten eines Vektors heißt Betrag des Vek-tors.
Schreibweise: |~a|
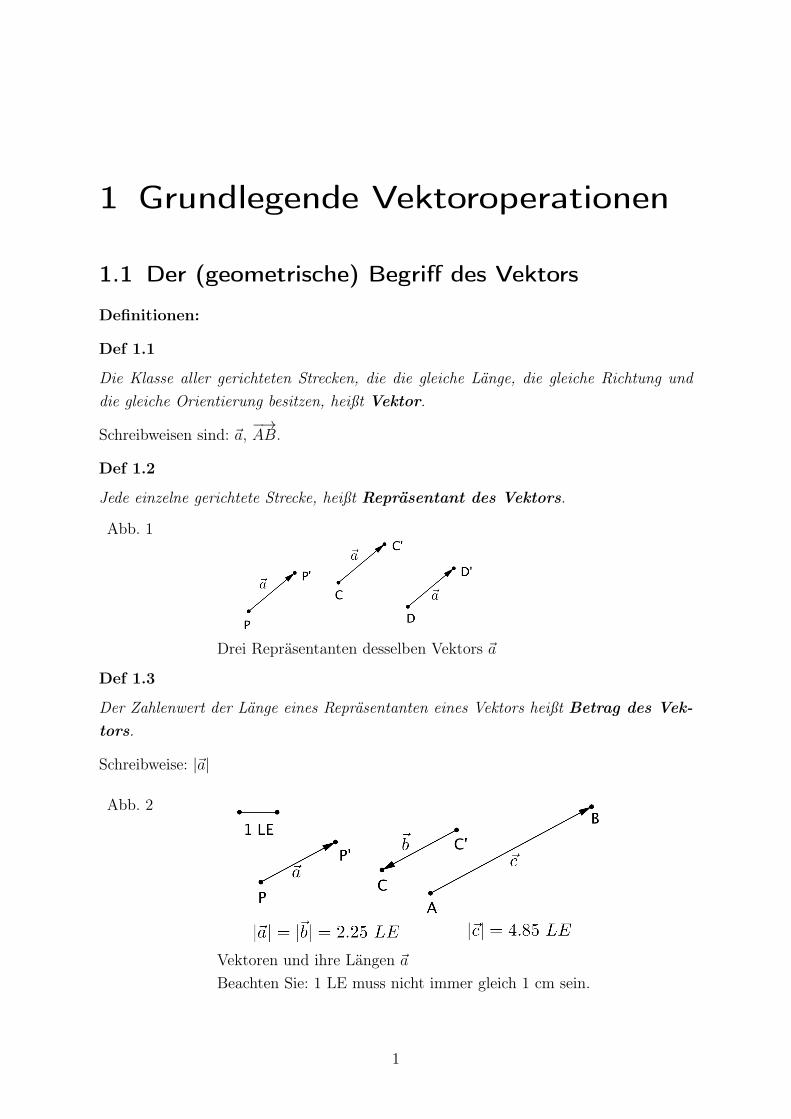
Abb. 2
Vektoren und ihre Längen ~aBeachten Sie: 1 LE muss nicht immer gleich 1 cm sein.
1
O. Schimmel UMG Greiz Vektorrechnung
Def 1.4
Der Vektor ~0 mit |~0| = 0 heißt Nullvektor.
Def 1.5
Jeder Vektor ~a mit |~a| = 1 heißt Einheitsvektor.
Def 1.6
Zwei Vektoren heißen parallel genau dann, wenn sie auf parallelen Geraden liegen.
Schreibweise: ~a||~b.
Def 1.7
Zwei parallele Vektoren können entweder gleichgerichtet ~a ↑↑ ~b oder entgegengesetztgerichtet (bzw. antiparallel) ~a ↑↓ ~b sein. (Auch richtig: gleich bzw. entgegengesetztorientiert.)
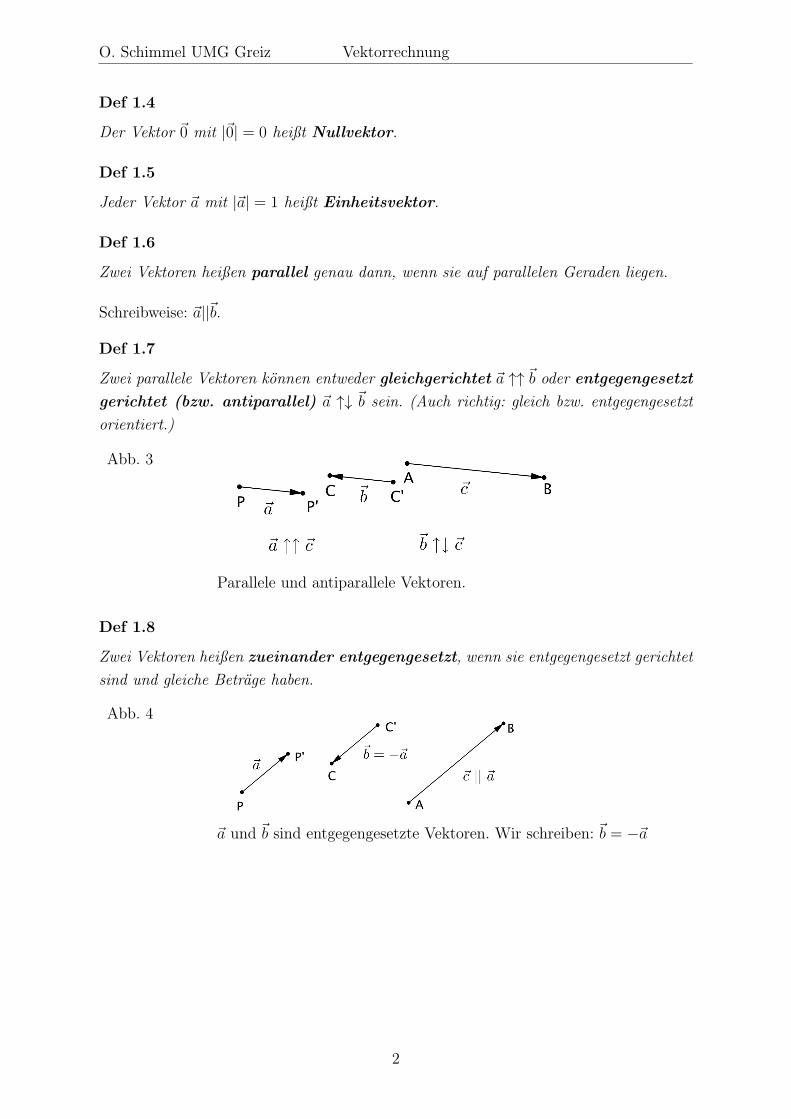
Abb. 3
Parallele und antiparallele Vektoren.
Def 1.8
Zwei Vektoren heißen zueinander entgegengesetzt, wenn sie entgegengesetzt gerichtetsind und gleiche Beträge haben.
Abb. 4
~a und ~b sind entgegengesetzte Vektoren. Wir schreiben: ~b = −~a
2
O. Schimmel UMG Greiz Vektorrechnung
1.2 Addition von Vektoren
Def 1.9
Gegeben seien zwei Vektoren ~a und ~b durch ihre Repräsentanten ~a =−−→PP ′ und ~b =
−−−→P ′P ′′.
Der dadurch eindeutig bestimmte Vektor ~a +~b =−−→PP ′′ heißt Summe der Vektoren ~a
und ~b .
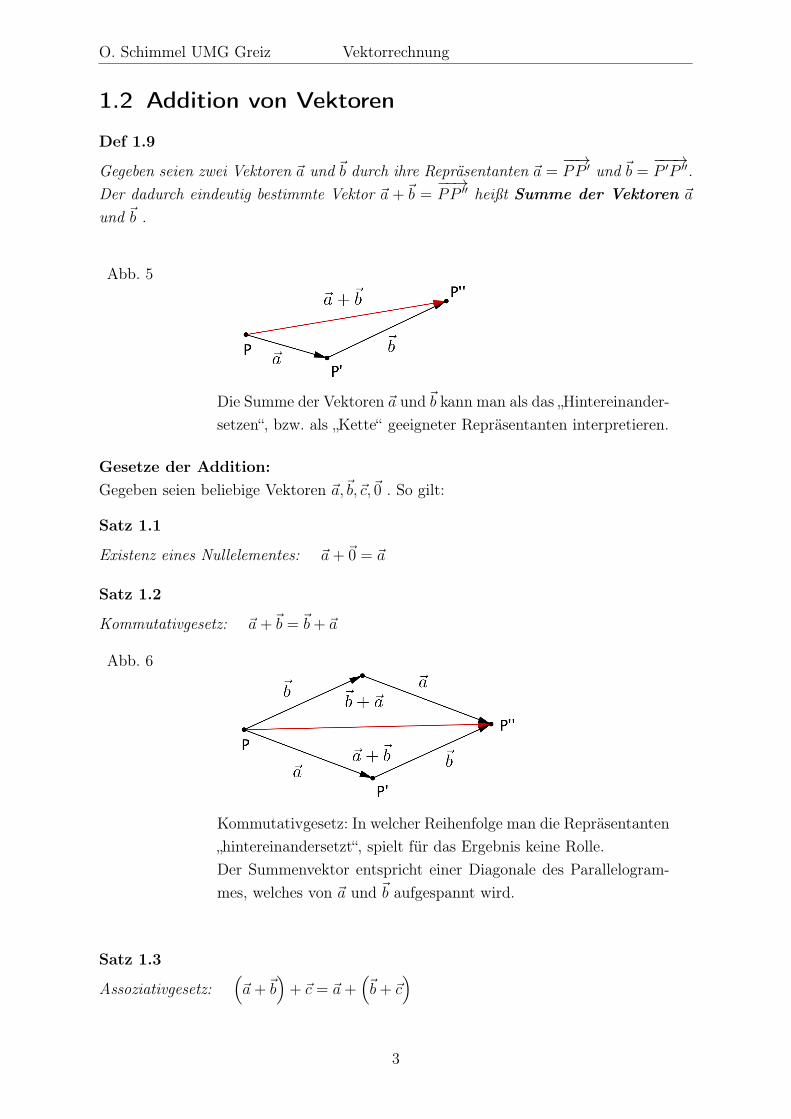
Abb. 5
Die Summe der Vektoren ~a und~b kann man als das „Hintereinander-setzen“, bzw. als „Kette“ geeigneter Repräsentanten interpretieren.
Gesetze der Addition:Gegeben seien beliebige Vektoren ~a,~b,~c,~0 . So gilt:
Satz 1.1
Existenz eines Nullelementes: ~a+~0 = ~a
Satz 1.2
Kommutativgesetz: ~a+~b = ~b+ ~a
Abb. 6
Kommutativgesetz: In welcher Reihenfolge man die Repräsentanten„hintereinandersetzt“, spielt für das Ergebnis keine Rolle.Der Summenvektor entspricht einer Diagonale des Parallelogram-mes, welches von ~a und ~b aufgespannt wird.
Satz 1.3
Assoziativgesetz:(~a+~b
)+ ~c = ~a+
(~b+ ~c
)
3

O. Schimmel UMG Greiz Vektorrechnung
Abb. 7
Assoziativgesetz: Auch bei drei Vektoren, spielt es keine Rolle, obman zuerst die Summe der ersten beiden bildet und dazu den drit-ten addiert (roter Weg) oder ob man zum ersten Vektor die Summeaus dem zweiten und den dritten addiert. (blauer Weg)Man könnte die Vektoren auch einzeln nacheinander addieren.
Satz 1.4
Zu jedem Vektor ~a existiert ein eindeutig bestimmter Vektor ~b, so dass gilt: ~a+~b = ~0
Beweis: Existenz:Sei ~a =
−−→PP ′, dann wählen wir ~b =
−−→P ′P .
Für die Summe gilt somit: ~a+~b =−−→PP ′ +
−−→P ′P =
−→PP = ~0
Eindeutigkeit:Annahme: Es gibt ~b1 6= ~b2 mit ~a+~b1 = ~0 ∧ ~a+~b2 = ~0
Folgerung:
~b2 = ~b2 +~0
= ~b2 + (~a+~b1)
= (~b2 + ~a) +~b1
= ~0 +~b1
= ~b1
Bemerkung: Wir nennen den Vektor ~b auch den zu ~a inversen Vektor undschreiben ~b = −~a
Satz 1.5
Die Vektorgleichung ~a+ ~x = ~b hat die eindeutige Lösung ~x = −~a+~b = ~b− ~a.
4
O. Schimmel UMG Greiz Vektorrechnung
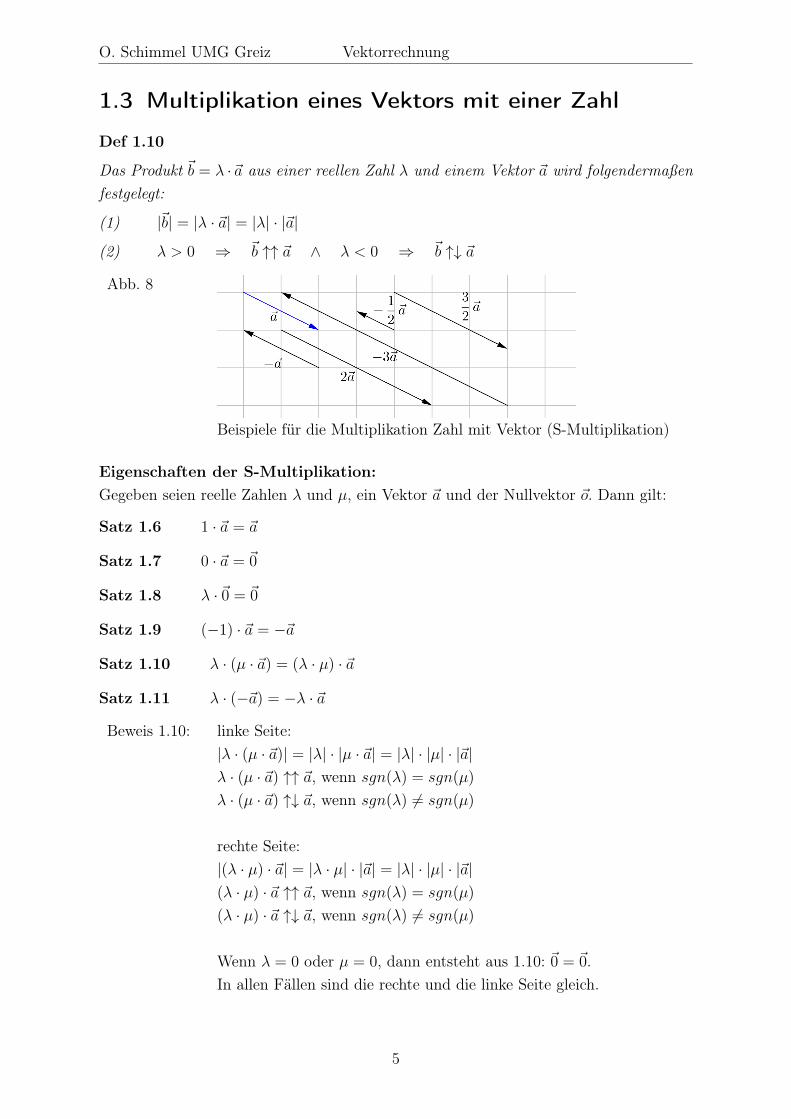
1.3 Multiplikation eines Vektors mit einer Zahl
Def 1.10
Das Produkt ~b = λ ·~a aus einer reellen Zahl λ und einem Vektor ~a wird folgendermaßenfestgelegt:
(1) |~b| = |λ · ~a| = |λ| · |~a|
(2) λ > 0 ⇒ ~b ↑↑ ~a ∧ λ < 0 ⇒ ~b ↑↓ ~a
Abb. 8
Beispiele für die Multiplikation Zahl mit Vektor (S-Multiplikation)
Eigenschaften der S-Multiplikation:Gegeben seien reelle Zahlen λ und µ, ein Vektor ~a und der Nullvektor ~o. Dann gilt:
Satz 1.6 1 · ~a = ~a
Satz 1.7 0 · ~a = ~0
Satz 1.8 λ ·~0 = ~0
Satz 1.9 (−1) · ~a = −~a
Satz 1.10 λ · (µ · ~a) = (λ · µ) · ~a
Satz 1.11 λ · (−~a) = −λ · ~a
Beweis 1.10: linke Seite:|λ · (µ · ~a)| = |λ| · |µ · ~a| = |λ| · |µ| · |~a|λ · (µ · ~a) ↑↑ ~a, wenn sgn(λ) = sgn(µ)
λ · (µ · ~a) ↑↓ ~a, wenn sgn(λ) 6= sgn(µ)
rechte Seite:|(λ · µ) · ~a| = |λ · µ| · |~a| = |λ| · |µ| · |~a|(λ · µ) · ~a ↑↑ ~a, wenn sgn(λ) = sgn(µ)
(λ · µ) · ~a ↑↓ ~a, wenn sgn(λ) 6= sgn(µ)
Wenn λ = 0 oder µ = 0, dann entsteht aus 1.10: ~0 = ~0.In allen Fällen sind die rechte und die linke Seite gleich.
5
2 Linearkombination von Vektoren
2.1 Begriff der Linearkombination
Def 2.1
Seien {~a1;~a2;~a3; ...;~an} eine Menge von Vektoren und λ1;λ2;λ3; ...;λn beliebige reelleZahlen, dann heißt jede Darstellung der Form
λ1~a1 + λ2~a2 + λ3~a3 + ...+ λn~an
Linearkombination der Vektoren ~a1 bis ~an.
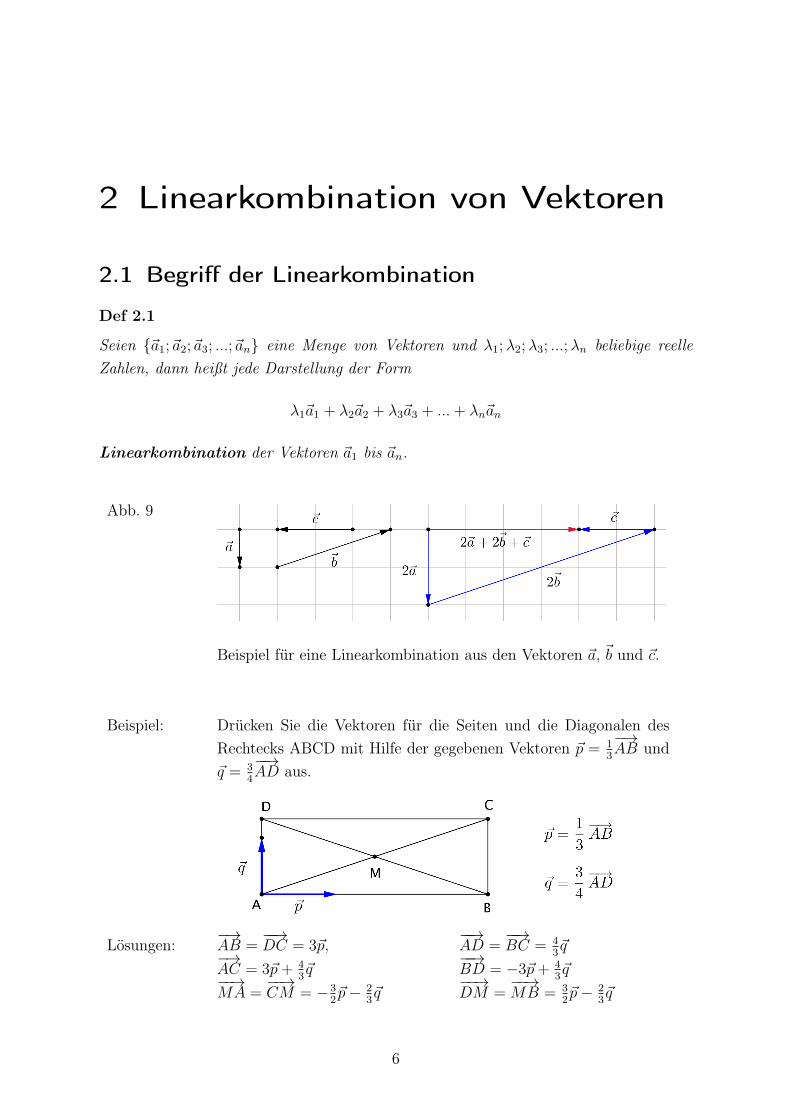
Abb. 9
Beispiel für eine Linearkombination aus den Vektoren ~a, ~b und ~c.
Beispiel: Drücken Sie die Vektoren für die Seiten und die Diagonalen desRechtecks ABCD mit Hilfe der gegebenen Vektoren ~p = 1
3
−→AB und
~q = 34
−−→AD aus.
Lösungen:−→AB =
−−→DC = 3~p,
−−→AD =
−−→BC = 4
3~q
−→AC = 3~p+ 4
3~q
−−→BD = −3~p+ 4
3~q
−−→MA =
−−→CM = −3
2~p− 2
3~q
−−→DM =
−−→MB = 3
2~p− 2
3~q
6
O. Schimmel UMG Greiz Vektorrechnung
Durch Linearkombinationen kann man Untersuchungen an geometrischen Figuren füh-ren. Dabei reichen wenige Ausgangsvektoren aus, um alle anderen Vektoren darzustellen.In der Ebene benötigt man zwei und im Raum drei geeignete Ausgangsvektoren.Zu Vereinfachungen der rechnerischen Ansätze benötigen wir noch zwei Gesetzmäßigkei-ten.
Distributivgesetze:
Satz 2.1
Seien λ, µ ∈ R und ~a ~b Vektoren. Dann gilt:
(1) (λ+ µ) · ~a = λ · ~a+ µ · ~a
(2) λ · (~a+~b) = λ · ~a+ λ ·~b
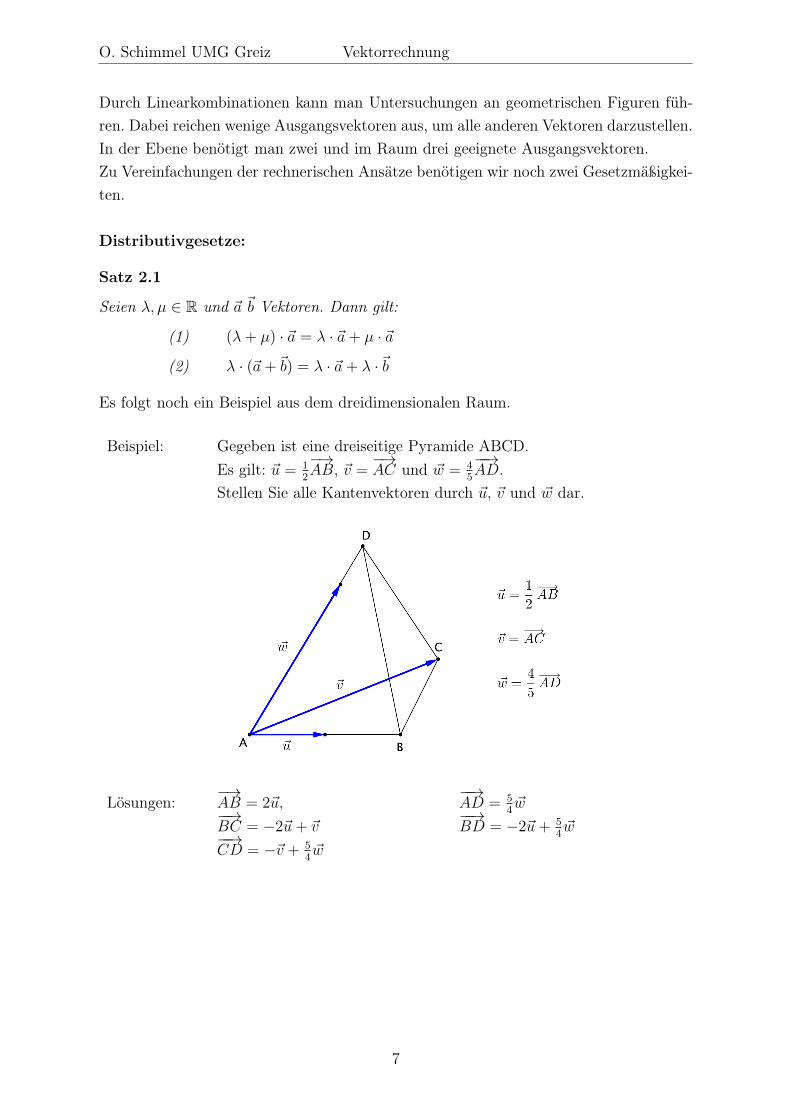
Es folgt noch ein Beispiel aus dem dreidimensionalen Raum.
Beispiel: Gegeben ist eine dreiseitige Pyramide ABCD.Es gilt: ~u = 1
2
−→AB, ~v =
−→AC und ~w = 4
5
−−→AD.
Stellen Sie alle Kantenvektoren durch ~u, ~v und ~w dar.
Lösungen:−→AB = 2~u,
−−→AD = 5
4~w
−−→BC = −2~u+ ~v
−−→BD = −2~u+ 5
4~w
−−→CD = −~v + 5
4~w
7

O. Schimmel UMG Greiz Vektorrechnung
2.2 Lineare Unabhängigkeit von Vektoren
Definitionen
Def 2.2
Die Vektoren ~a1;~a2;~a3; ...;~an heißen linear abhängig genau dann, wenn es reelle Zahlenλ1;λ2;λ3; ...;λn nicht alle gleich Null so gibt, dass gilt:
~0 = λ1~a1 + λ2~a2 + λ3~a3 + ...+ λn~an =n∑
i=1
λi · ~ai.
Def 2.3
Wenn sich der Nullvektor nur auf die triviale Weise erzeugen lässt, dass gilt: λ1 = λ2 =
... = λn = 0, heißen die Vektoren linear unabhängig.
Satz 2.2
Die Vektoren ~a1;~a2;~a3; ...;~an sind linear abhängig genau dann, wenn es mindestens einenunter ihnen gibt, der sich als Linearkombination der anderen darstellen lässt.
Beweis: Richtung ⇒:Der Vektor ~ak lässt sich durch die anderen darstellen:~ak = λ1~a1 + λ2~a2 + λ3~a3 + ...+ λn~an | − ~ak ohne ~ak~0 = λ1~a1 + λ2~a2 + λ3~a3 + ...− ak + ...+ λn~an
Wegen λk 6= 0 wird der Nullvektor nichtrivial erzeugt, d.h. dieVektoren sind linear abhängig.
Richtung ⇐:Die Vektoren sind linear anhängig.Nach Def 2.2 gibt es dann in ~0 = λ1~a1 + λ2~a2 + λ3~a3 + ... + λn~an
ein λk 6= 0.Wir rechnen: −λk~ak:−λk~ak = λ1~a1 + λ2~a2 + λ3~a3 + ...+ λn~an | : (−λk)
~ak = −λ1λk~a1 −
λ2λk~a2 −
λ3λk~a3 − ...−
λnλk~an
Der Vektor ~ak lässt sich also aus den anderen linear kombinieren.
Schlussfolgerung:Lässt sich kein Vektor ~ai aus den anderen Vektoren {~a1,~a2, ...,~an} durch Linearkombi-nation erzeugen, so sind die Vektoren linear unabhängig.
8

O. Schimmel UMG Greiz Vektorrechnung
Spezialfälle für zwei und drei Vektoren:
Satz 2.3
Seien ~a und ~b zwei Vektoren mit |~a| 6= 0 und |~b| 6= 0. Dann gilt:
1. Wenn ~a und ~b abhängig sind, dann gilt: ~a||~b und umgekehrt.
2. Wenn ~a und ~b unabhängig sind, also eine Ebene aufspannen, dann kann man jedenVektor ~x dieser Ebene in eindeutiger Weise als Linearkombination aus ~a und ~bdarstellen.
Beweis: Teil 1:Seien ~a und ~b abhängig. Dann gib es eine Zahl λ mit ~b = λ · ~aDaraus folgt aber sofort ~b||~aUmkehrung analog.
Teil 2:Wir betrachten den Vektor ~x =
−−→OX
Wir zeichnen eine zu ~a parallele Trägergerade a durch O und einezu ~b parallele Trägergerade b durch X. Da a und b nicht parallelsein können, sei a ∩ b = P . Dann gilt:−→OP = λ1 · ~a und
−−→PX = λ2 ·~b.
Mit−−→OX =
−→OP +
−−→PX = λ1 · ~a+ λ2 ·~b gibt es also eine Linearkom-
bination.Eindeutigkeit:Annahme: Es gibt zwei verschiedene Linearkombinationen für ~x.Also: λ1 · ~a+ λ2 ·~b = r · ~a+ s ·~b mit λ1 6= r und λ2 6= s
Daraus folgt: (λ1 − r) · ~a+ (λ2 − s) ·~b = ~0
Da aber ~a und ~b unabhängig sind, folgt λ1 = r und λ2 = s, also einWiderspruch.Die Darstellung ist also eindeutig.
Satz 2.4
Wenn drei Vektoren linear unabhängig sind, spannen sie den dreidimensionalen Raumauf und umgekehrt.
Begründung: Aus Satz 2.3 wissen wir, dass sich jeder Vektor der Ebene aus zweilinear unabhängigen Vektoren kombinieren lässt.Damit sind drei komplanare Vektoren (d.h. Vektoren in einer Ebe-ne) stets linear abhängig und umgekehrt.Wenn sie also unabhängig sind, dann spannen sie den Raum aufund umgekehrt.
9

O. Schimmel UMG Greiz Vektorrechnung
2.3 Geometrische Beweise mit Linearkombinationen
Jeder elementargeometrische Satz lässt sich vektoriell beweisen. Eine Gruppe dieser Be-weise führt über Linearkombinationen. Einige Beispiele sollen dies zeigen.
Beispiel 1: Wenn sich in einem Viereck die Diagonalen halbieren, dann ist esein Parallelogramm.
Voraussetzung (vektoriell):−−→AM =
−−→MC =
1
2
−−→MC und
−−→BM =
−−→MD =
1
2
−−→BD
Behauptung (vektoriell):−→AB||
−−→DC und
−−→AD||
−−→BC
Nachweis:
−−→AD =
−−→AM +
−−→MD
=−−→MC +
−−→BM
=−−→BM +
−−→MC
=−−→BC
⇒−−→AD||
−−→BC
Analog zeigt man−→AB||
−−→DC
Beispiel 2: Wenn ein Viereck ein Parallelogramm ist, dann halbieren sich dieDiagonalen.
Voraussetzung (vektoriell):−→AB =
−−→DC = ~a und
−−→AD =
−−→BC = vecb
Behauptung (vektoriell):−−→AM =
−−→MC =
1
2
−−→MC und
−−→BM =
−−→MD =
1
2
−−→BD
Nachweis:Sei−−→AM = λ
−→AC = λ(~a+~b) und
−−→BM = µ
−−→BD = µ(−~a+~b)
Dann ist:−−→MC = (1− λ)(~a+~b) und
−−→BM = (1− µ)(−~a+~b)
Wir erhalten:
10
O. Schimmel UMG Greiz Vektorrechnung
−−→DC = ~a
~a =−−→DM +
−−→MC
~a = −(1− µ)(−~a+~b) + (1− λ)(~a+~b)~0 = (1− λ− µ)~a+ (µ− λ)~b⇒ 0 = 1− λ− µ ∧ 0 = µ− λ
⇒ λ = µ =1
2
11

3 Vektorraum (Extra)
Wir wollen nun jede Menge von Oblekten, die die bisher behandelten Eigenschaftenbesitzt zu einem neuen Begriff Vektorraum zusammenfassen. Damit erhalten wir diefolgende Definition.
Def 3.1
Sei V eine beliebige Menge für die eine Addition und die Multiplikation mit reellen Zahlen(S-Multiplikation) definiert ist. V heißt zusammen mit diesen Operationen Vektorraum(V,+, ·), genau dann, wenn für beliebige ~a, ~b, ~c aus V und beliebige reelle Zahlen λ; µgilt:
1. Es gilt stets: ~a+ (~b+ ~c) = (~a+~b) + ~c
2. Es gibt ein Element ~0 mit ~a+~0 = ~a
3. Zu jedem Element ~a gibt es genau ein Element −~a, so dass gilt: ~a+ (−~a) = ~0
4. Es gilt stets: ~a+~b = ~b+ ~a
5. Für die Zahl 1 gilt: 1 · ~a = ~a
6. Es gilt stets: λ · (µ · ~a) = (λ · µ) · ~a
7. Es gilt stets: (λ+ µ) · ~a = λ · ~a+ µ · ~a
8. Es gilt stets: λ · (~a+~b) = λ · ~a+ λ ·~b
Bemerkungen:
1. Der Begriff ist viel allgemeiner als nur geometrisch zu inter-pretieren, denn V kann eine beliebige Menge sein.
2. In der Definition kommen zwei verschiedene Multiplikationenvor, die man streng genommen getrennt betrachten müsste.Die Multiplikation zwischen reellen Zahlen und die einer Zahlmit einem Vektor (S-Multiplikation).
3. Um zu zeigen, dass eine Menge ein Vektorraum ist, muss manalle diese Eigenschaften einzeln nachweisen.
12
4 Vektoren in Komponenten- undKoordinatenform
4.1 Basen und Koordinatensysteme
Def 4.1
Seien ~a1;~a2; ...;~an linear unabhängige Vektoren. Dann heißt {~a1;~a2; ...;~an} Basis desvon den Vektoren aufgespannten Vektorraumes.
Def 4.2
Eine Basis heißt orthonormiert, wenn für die Basisvektoren folgendes gilt:
1. Die Basisvektoren stehen paarweise senkrecht aufeinander: i 6= j ⇒ ~ai⊥~aj
2. Alle Basisvektoren sind Einheitsvektoren: |~a1| = |~a2| = ... = |~an| = 1
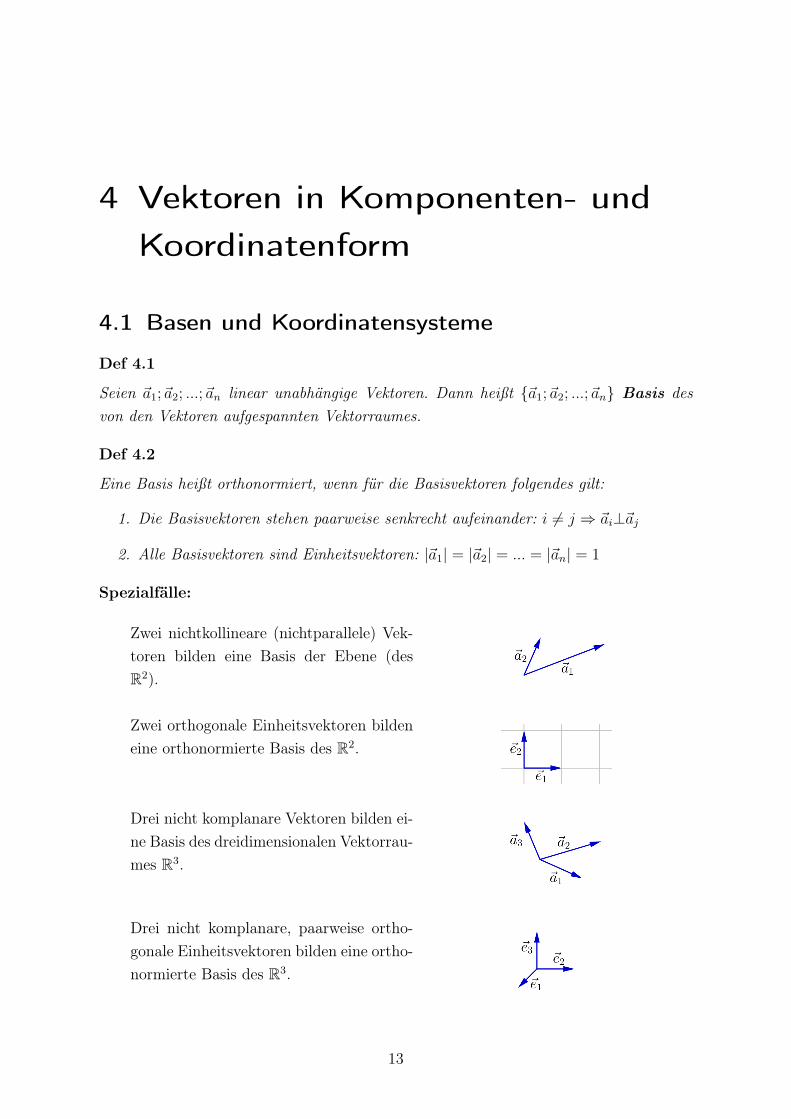
Spezialfälle:
Zwei nichtkollineare (nichtparallele) Vek-toren bilden eine Basis der Ebene (desR2).
Zwei orthogonale Einheitsvektoren bildeneine orthonormierte Basis des R2.
Drei nicht komplanare Vektoren bilden ei-ne Basis des dreidimensionalen Vektorrau-mes R3.
Drei nicht komplanare, paarweise ortho-gonale Einheitsvektoren bilden eine ortho-normierte Basis des R3.
13
O. Schimmel UMG Greiz Vektorrechnung
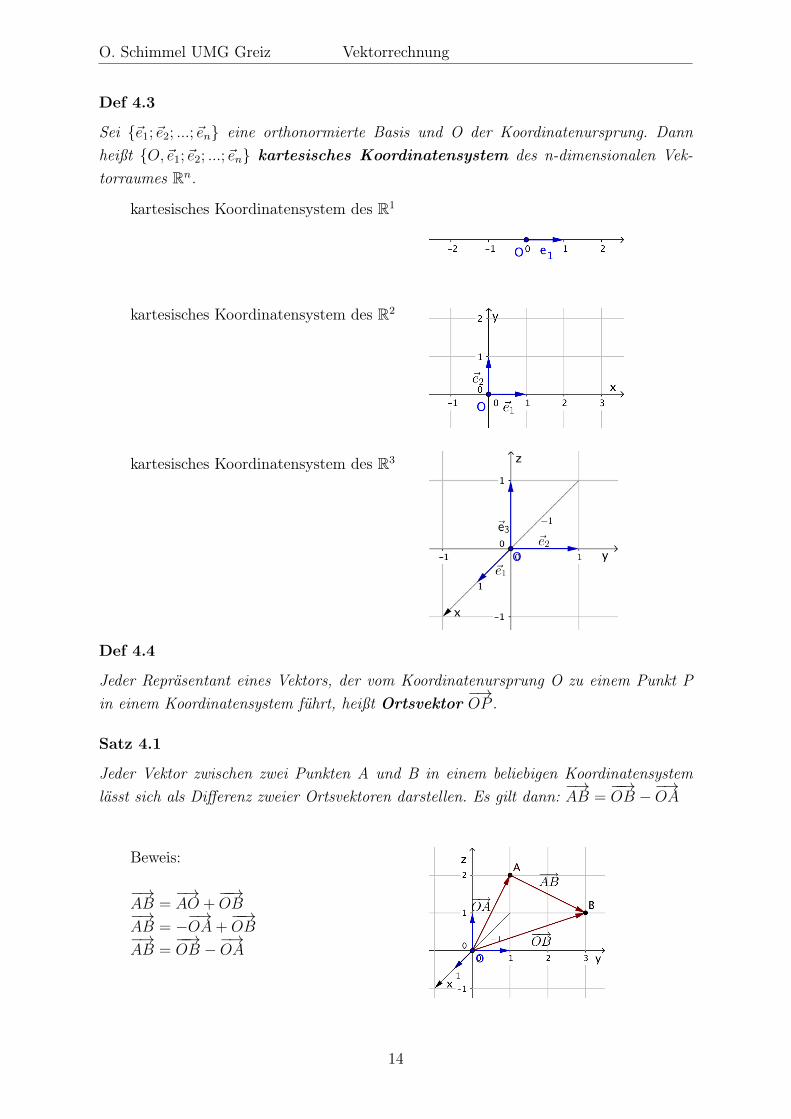
Def 4.3
Sei {~e1;~e2; ...;~en} eine orthonormierte Basis und O der Koordinatenursprung. Dannheißt {O,~e1;~e2; ...;~en} kartesisches Koordinatensystem des n-dimensionalen Vek-torraumes Rn.
kartesisches Koordinatensystem des R1
kartesisches Koordinatensystem des R2
kartesisches Koordinatensystem des R3
Def 4.4
Jeder Repräsentant eines Vektors, der vom Koordinatenursprung O zu einem Punkt Pin einem Koordinatensystem führt, heißt Ortsvektor
−→OP .
Satz 4.1
Jeder Vektor zwischen zwei Punkten A und B in einem beliebigen Koordinatensystemlässt sich als Differenz zweier Ortsvektoren darstellen. Es gilt dann:
−→AB =
−−→OB −
−→OA
Beweis:
−→AB =
−→AO +
−−→OB
−→AB = −
−→OA+
−−→OB
−→AB =
−−→OB −
−→OA
14

O. Schimmel UMG Greiz Vektorrechnung
4.2 Komponenten und Koordinaten von Vektoren
Def 4.5
Sei {O,~e1, ~e2, ..., ~en} ein Koordinatensystem des Vektorraumes Rn. Dann gibt es reelleZahlen x1, x2, ..., xn, für die jeder Vektor ~x eindeutig durch Linearkombination in derForm
~x = x1~e1 + x2~e2 + ...+ xn~en =
x1
x2...xn
darstellbar ist. Dabei heißen:
x1~e1, x2~e2, ..., xn~en Komponenten von ~x und
x1, x2, ..., xn Koordinaten von ~x.
Beispiel:−→AB = 3~e1 − 2~e2 =
(3
−2
)
−→AC = ~e1 + 2~e2 =
(1
2
)
−−→BC = −2~e1 + 4~e2 =
(−24
)
Bemerkungen:
1. Obige Definition gilt für beliebigdimensionale Vektorräume. Die Anzahl der Koor-dinaten der Vektoren entspricht der Dimension.
2. Man beachte die unterschiedlichen Schreibweisen für Punkte und Vektoren. EinPunkt im Rn wird stets in der Form eines geordneten Tupels geschrieben. JederVektor dagegen in Spaltenschreibweise.
P (x1;x2; ...;xn) ⇒−→OP =
x1
x2...xn
3. Ein Ortsvektor hat dieselben Koordinaten wie sein Endpunkt.
15
O. Schimmel UMG Greiz Vektorrechnung
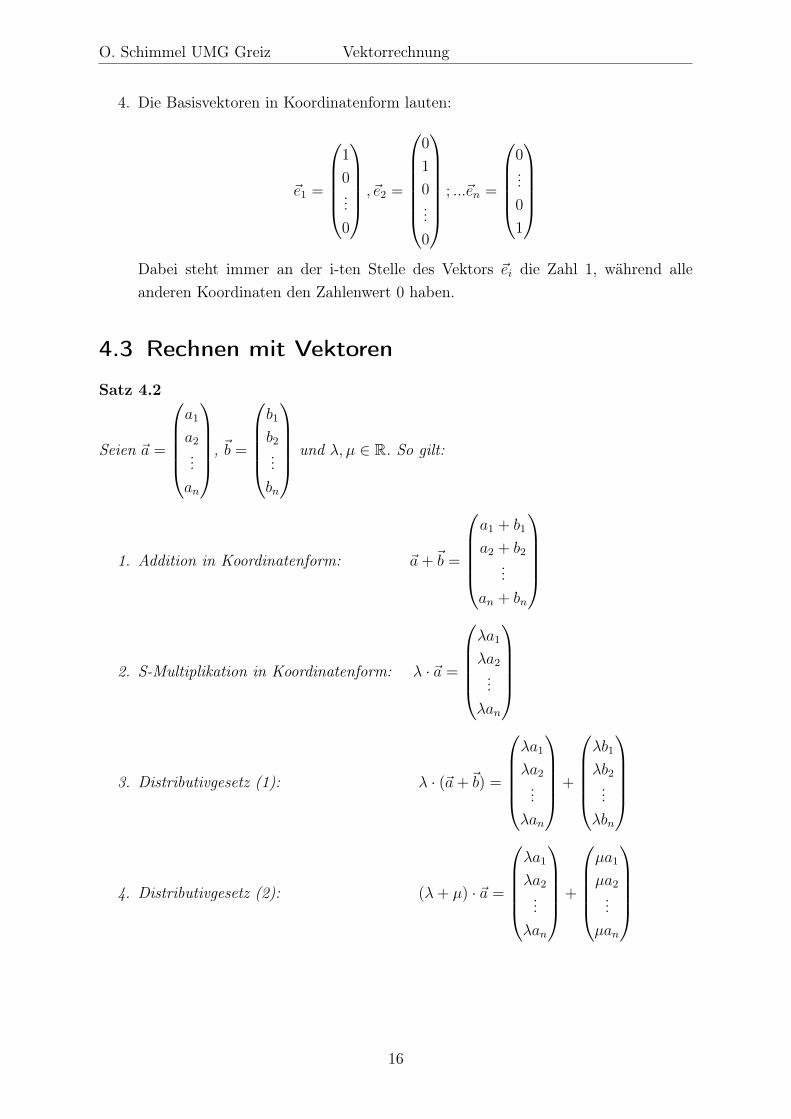
4. Die Basisvektoren in Koordinatenform lauten:
~e1 =
1
0...0
, ~e2 =
0
1
0...0
; ...~en =
0...0
1
Dabei steht immer an der i-ten Stelle des Vektors ~ei die Zahl 1, während alleanderen Koordinaten den Zahlenwert 0 haben.
4.3 Rechnen mit Vektoren
Satz 4.2
Seien ~a =
a1
a2...an
, ~b =
b1
b2...bn
und λ, µ ∈ R. So gilt:
1. Addition in Koordinatenform: ~a+~b =
a1 + b1
a2 + b2...
an + bn
2. S-Multiplikation in Koordinatenform: λ · ~a =
λa1
λa2...λan
3. Distributivgesetz (1): λ · (~a+~b) =
λa1
λa2...λan
+
λb1
λb2...λbn
4. Distributivgesetz (2): (λ+ µ) · ~a =
λa1
λa2...λan
+
µa1
µa2...
µan
16

O. Schimmel UMG Greiz Vektorrechnung
Bemerkungen:
1. Die Beweise erfolgen über Nachrechnen unter Anwendung der Definitionen undder Rechenregeln zu den Rechenoperationen. Sämtliche dort angegebenen Gesetzelassen sich in die Koordinatenform der Vektoren übertragen und somit auf dasRechnen mit reellen Zahlen zurückführen.
2. Wie wir in den Beispielen noch sehen werden, entstehen beim Rechnen mit Para-metern oft lineare Gleichungssysteme.
Beispiel: Gegeben sind im R3 die Vektoren ~a =
3
−24
,~b =
−120
.
1. Berechnen Sie 3 · ~a+ 4 · (2~b− ~a)
2. Untersuchen Sie ~a und ~b auf Parallelität.
Lösung:
3 · ~a+ 4 · (2~b− ~a) = 3 · ~a+ 8 ·~b− 4 · ~a= −~a+ 8 ·~b
=
−32−4
+
−8160
=
−1118
−4
Ansatz: Es müsste eine Zahl t geben mit:
⇒ ~b = t · ~a
⇒
−120
= t ·
3
−24
⇒ −1 = t · 3 ⇒ t = −1
3⇒ 2 = t · −2 ⇒ t = −1⇒ 0 = t · −4 ⇒ t = 0
Widerspruch, da kein einheitlicher Wert für t. Also gilt: ~a ∦ ~b
17

O. Schimmel UMG Greiz Vektorrechnung
4.4 Untersuchung auf lineare Unabhängigkeit
Um eine Gruppe von Vektoren auf lineare Unabhängigkeit zu untersuchen, kann man dieDefinition benutzen und versuchen, den Nullvektor durch Linearkombination zu erzeu-gen. Ist er nur auf triviale Weise erzeugbar, sind die Vektoren linear unabhängig. Gibtes eine nichttriviale Möglichkeit, so sind sie linear abhängig.Eine bessere Methode ist es jedoch häufig, den Satz 2.2 anzuwenden und einen derVektoren mit Hilfe der anderen darzustellen. Gibt es eine solche Darstellung, sind dieVektoren linear abhängig. Gibt es sie nicht, dann sind sie unabhängig.
Unabhängigkeit bei zwei VektorenFolgende Aussagen sind zueinander äquivalent:
1. Zwei Vektoren sind linear unabhängig.
2. Die beiden Vektoren sind nichtkollinear (d.h. nicht parallel).
3. Es gibt keine reelle Zahl (ungleich Null) mit der man einen der beiden Vektorenmultiplizieren könnte, so dass der andere entsteht.
Beispiel: Untersuchen Sie, für welche Parameterwerte t die Vektoren
~a =
(1
−2
),~b =
(t+ 4
2t
)linear unabhängig sind.
Lösung: Wir stellen ~b als Vielfaches von ~a dar:
~b = λ~a(t+ 4
2t
)= λ ·
(1
−2
)
t+ 4 = λ ∧ 2t = −2λ⇒ 2t = −2(t+ 4)
4t = −8t = −2λ = 2
(2
−4
)= 2 ·
(1
−2
)
Nur für t = −2 sind die Vektoren linear abhängig. Für alle anderenWerte von t sind sie unabhängig.
18

O. Schimmel UMG Greiz Vektorrechnung
Unabhängigkeit bei drei VektorenFolgende Aussagen sind zueinander äquivalent:
1. Drei Vektoren sind linear unabhängig.
2. Die drei Vektoren sind nicht komplanar (d.h. liegen nicht in einer Ebene)
3. Es gibt keinen der drei Vektoren, der sich als Linearkombination aus den anderenbeiden darstellen lässt.
Beispiel: Untersuchen Sie die Vektoren
~a =
1
−25
,~b =
4
−3−2
und ~c =
−1−839
auf lineare Abhängigkeit.
Lösung: Wir stellen ~c als Vielfaches von ~a und ~b dar:
~c = λ~a+ µ~b
−1−839
= λ ·
1
−25
+ µ ·
4
−3−2
−1 = λ+ 4µ
−8 = −2λ− 3µ
39 = 5λ− 2µ
(1) ∧ (2)⇒ λ = 7 ∧ µ = −2
in (3)⇒ 39 = 5 · 7− 2 · (−2)39 = 39 w.A.
⇒
−1−839
= 7 ·
1
−25
− 2 ·
4
−3−2
Die Vektoren sind linear abhängig, denn es gibt eine Linearkombi-nation, mit der sich ~c aus ~a und ~b darstellen lässt.Man hätte übrigens jeden der drei Vektoren durch die anderen bei-den darstellen können.
19

O. Schimmel UMG Greiz Vektorrechnung
4.5 Unabhängigkeit mit Determinanten (Extra)
Hat man genau n Vektoren des Rn, so kann man eine Determinante nutzen, um dieVektoren auf lineare Unabhängigkeit zu untersuchen. Besonders bei zwei Vektoren imR2 und drei Vektoren im R3 eignet sich dieses Verfahren.
Vorgehensweise:
1. Trage die Spaltenvektoren nebeneinander in die Determinante ein.
2. Berechne den Wert der Determinante.
3. Entscheide über die Unabhängigkeit.
Entscheidungsregel:Ist die Determinante ungleich Null, so sind die Vektoren unabhängig.
Berechnung von Determinanten:Eine Determinante ist eine Zahl, die aus einem quadratischen Zahlenschema nach ei-ner wohldefinierten Rechenvorschrift entsteht. (Hier nur für zweireihige und dreireihigeDeterminanten beschrieben.)
1. Eine zweireihige Determinante wird berechnet, indem man das Produkt aus denElementen Nebendiagonalen vom Produkt der Elemente der Hauptdiagonalen sub-trahiert. ∣∣∣∣∣a11 a12
a21 a22
∣∣∣∣∣ = a11 · a22 − a21 · a12
2. Eine dreireihige Determinante wird berechnet, indem man die Produkte aller er-gänzten Nebendiagonalen von den Produkten der ergänzten Hauptdiagonalen sub-trahiert. (Regel von Sarrus)∣∣∣∣∣∣∣a11 a12 a13
a21 a22 a23
a31 a32 a33
∣∣∣∣∣∣∣ = a11a22a33+a12a23a31+a13a21a32−a31a22a13−a32a23a11−a33a21a12
Beispiel: Berechnung einer dreireihigen Determinante∣∣∣∣∣∣∣2 5 −23 2 7
−3 6 2
∣∣∣∣∣∣∣ = 8− 105− 36− 12− 84− 30
= −259
20

O. Schimmel UMG Greiz Vektorrechnung
Beispiel: Untersuchen Sie die Unabhängigkeit der Vektoren ~a =
(t− 1
t+ 3
)
und ~b =
(t+ 2
t− 2
)in Abhängigkeit von t.
∣∣∣∣∣t− 1 t+ 2
t+ 3 t− 2
∣∣∣∣∣ = (t+ 1)(t− 2)− ((t+ 3)(t+ 2))
= t2 − t− 2− (t2 + 5t+ 6)
= −6t− 8
−6t− 8 = 0
t = −4
3
Ergebnis:
Nur für t = −4
3sind die Vektoren linear abhängig. Für alle anderen
Werte sind sie linear unabhängig.
Beispiel: Untersuchen Sie die Vektoren
~a =
1
−25
,~b =
4
−3−2
und ~c =
−1−839
auf lineare Abhängigkeit.
Lösung:∣∣∣∣∣∣∣1 4 −1−2 −3 −85 −2 39
∣∣∣∣∣∣∣ = −117− 160− 4− (15 + 16− 312)
= −281 + 281
= 0
Ergebnis: Die Vektoren sind linear abhängig.
21

O. Schimmel UMG Greiz Vektorrechnung
Beispiel: Für welche Parameterwerte sind die folgenden Vektoren kompla-nar?
~a =
a
2a
1
,~b =
a+ 1
1
0
und ~c =
−211
Lösung:∣∣∣∣∣∣∣
a a+ 1 −22a 1 1
1 0 1
∣∣∣∣∣∣∣ = a+ a+ 1 + 0− (−2 + 0 + 2a2 + 2a)
= −2a2 + 3
−2a2 + 3 = 0
a2 =3
2
a1 =3
2
√2
a2 = −3
2
√2
Ergebnis:Nur für die beiden berechneten Werte von a sind die Vektoren kom-planar.
22
5 Skalarprodukt von Vektoren
5.1 Definition und geometrische Deutung
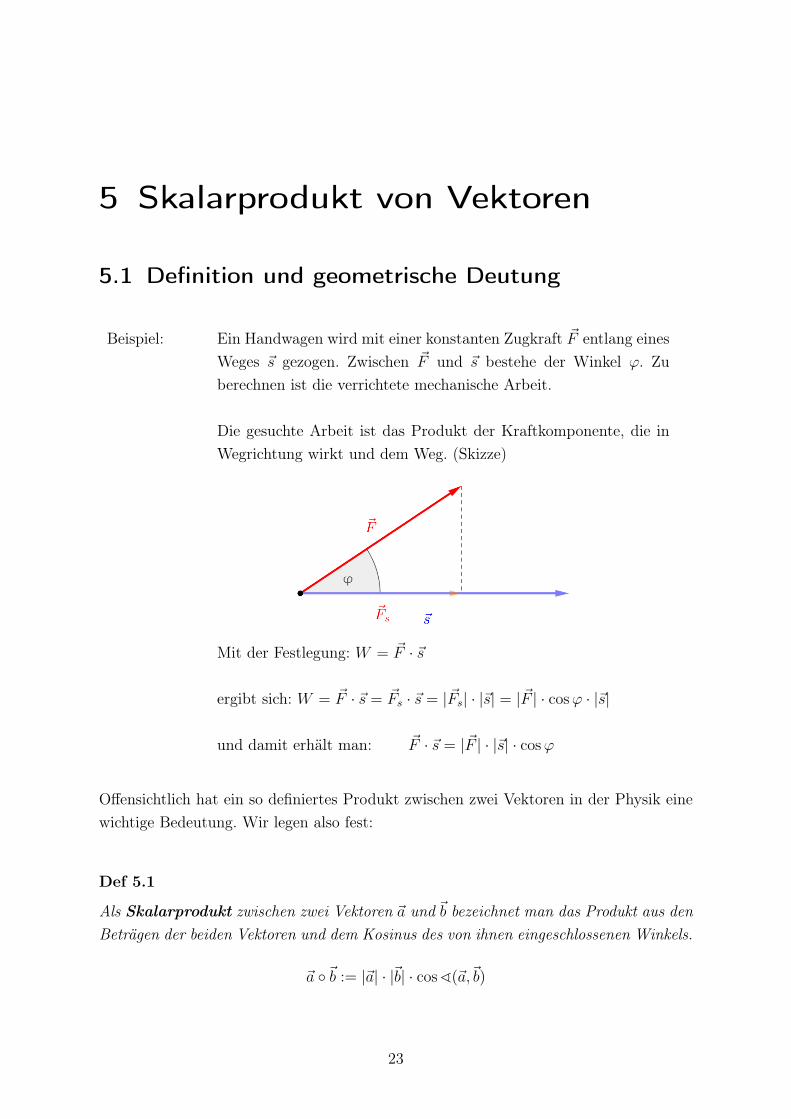
Beispiel: Ein Handwagen wird mit einer konstanten Zugkraft ~F entlang einesWeges ~s gezogen. Zwischen ~F und ~s bestehe der Winkel ϕ. Zuberechnen ist die verrichtete mechanische Arbeit.
Die gesuchte Arbeit ist das Produkt der Kraftkomponente, die inWegrichtung wirkt und dem Weg. (Skizze)
Mit der Festlegung: W = ~F · ~s
ergibt sich: W = ~F · ~s = ~Fs · ~s = |~Fs| · |~s| = |~F | · cosϕ · |~s|
und damit erhält man: ~F · ~s = |~F | · |~s| · cosϕ
Offensichtlich hat ein so definiertes Produkt zwischen zwei Vektoren in der Physik einewichtige Bedeutung. Wir legen also fest:
Def 5.1
Als Skalarprodukt zwischen zwei Vektoren ~a und ~b bezeichnet man das Produkt aus denBeträgen der beiden Vektoren und dem Kosinus des von ihnen eingeschlossenen Winkels.
~a ◦~b := |~a| · |~b| · cos^(~a,~b)
23
O. Schimmel UMG Greiz Vektorrechnung
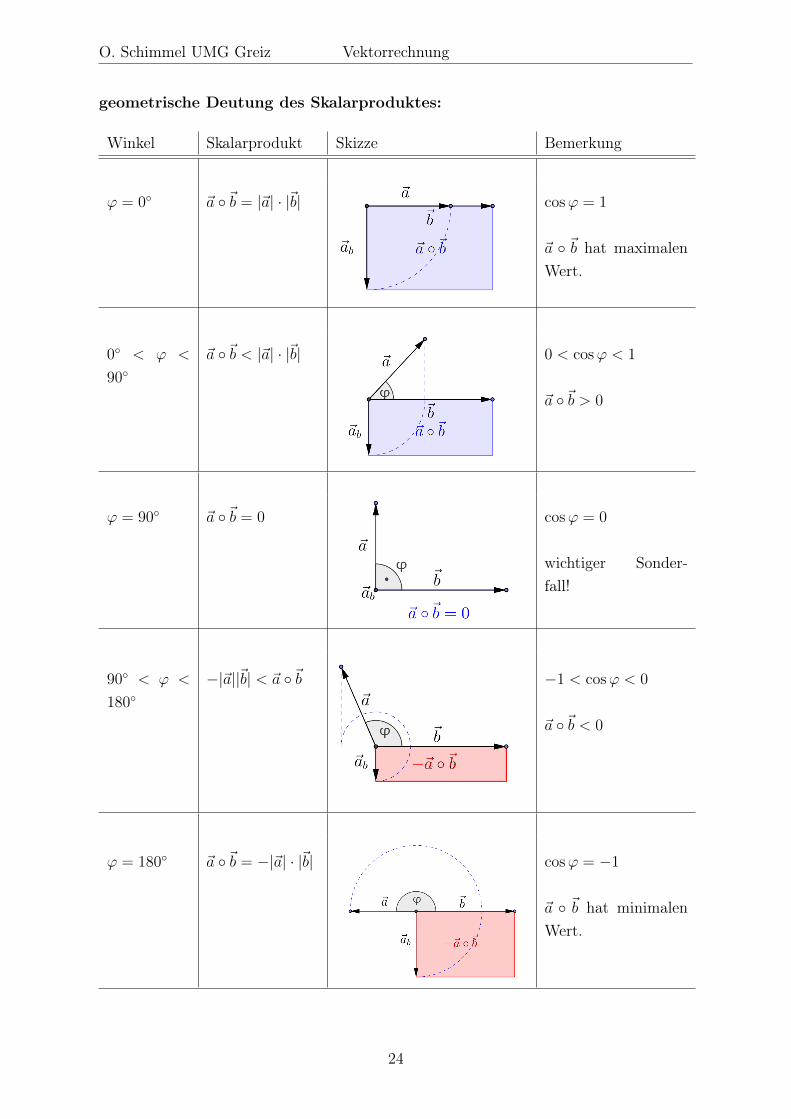
geometrische Deutung des Skalarproduktes:
Winkel Skalarprodukt Skizze Bemerkung
ϕ = 0◦ ~a ◦~b = |~a| · |~b| cosϕ = 1
~a ◦ ~b hat maximalenWert.
0◦ < ϕ <
90◦~a ◦~b < |~a| · |~b| 0 < cosϕ < 1
~a ◦~b > 0
ϕ = 90◦ ~a ◦~b = 0 cosϕ = 0
wichtiger Sonder-fall!
90◦ < ϕ <
180◦−|~a||~b| < ~a ◦~b −1 < cosϕ < 0
~a ◦~b < 0
ϕ = 180◦ ~a ◦~b = −|~a| · |~b| cosϕ = −1
~a ◦ ~b hat minimalenWert.
24

O. Schimmel UMG Greiz Vektorrechnung
Satz 5.1
Das Skalarprodukt zweier Vektoren, die nicht Nullvektor sind, wird genau dann gleichNull, wenn die Vektoren senkrecht zueinander stehen.
Beweis:
~a ◦~b = 0 ⇔ |~a| · |~b| · cos^(~a,~b) = 0
⇔ cos^(~a,~b) = 0
⇔ ^(~a,~b) = 90◦
Satz 5.2
Der Betrag eines Vektors ist die Wurzel aus dem Skalarprodukt des Vektors mit sichselbst.
|~a| =√~a ◦ ~a
Beweis:
~a ◦ ~a = |~a| · |~a| · cos^(~a,~a)
= |~a| · |~a|
= |~a|2
⇒ |~a| =√~a ◦ ~a
Bemerkungen:
1. Offensichtlich ist das Skalarprodukt zweier Vektoren eine Zahl, deren Betrag manals Fläche des von dem einem Vektor und der senkrechten Projektion des zweitenVektors auf den ersten begrenzten Rechtecks deuten kann.
2. Aus den bisherigen Überlegungen entnehmen wir weiterhin, dass man mit Hilfedes Skalarproduktes Beträge von Vektoren und Winkel berechnen kann. Außerdemkann man es nutzen, um Vektoren auf Orthogonalität zu prüfen.
3. Offen ist noch, wie man das Skalarprodukt zweier Vektoren aus deren Koordina-tenform berechnen kann.
25

O. Schimmel UMG Greiz Vektorrechnung
5.2 Das Skalarprodukt in Koordinatenform
.
Satz 5.3
Gegeben seien zwei Vektoren ~a =
a1
a2...an
und ~b =
b1
b2...bn
. Dann berechnen wir das Ska-
larprodukt in der folgenden Weise:
~a ◦~b := a1 · b1 + a2 · b2 + ...+ an · bn =n∑
i=1
aibi
Beweis für den R3:
~a ◦~b =
a1a2a3
◦b1b2b3
= (a1 · ~e1 + a2 · ~e2 + a3 · ~e3) ◦ (b1 · ~e1 + b2 · ~e2 + b3 · ~e3)
= a1~e1 ◦ (b1 · ~e1 + b2 · ~e2 + b3 · ~e3) + a2~e2 ◦ (b1 · ~e1 + b2 · ~e2 + b3 · ~e3)+a3~e3 ◦ (b1 · ~e1 + b2 · ~e2 + b3 · ~e3)
= a1~e1 ◦ b1~e1 + a2~e2 ◦ b2~e2 + a3~e3 ◦ b3~e3
= a1b1~e1 ◦ ~e1 + a2b2~e2 ◦ ~e2 + a3b3~e3 ◦ ~e3
= a1b1|~e1|2 + a2b2|~e2|2 + a3b3|~e3|2
= a1b1 + a2b2 + a3b3
Bemerkungen:
1. Wegen ~ei⊥~ej für i 6= j gilt für diese ~ei ◦ ~ej = 0. Daher bleiben nur die Produktemit denselben Einheitsvektoren erhalten.
2. Der Beweis funktioniert für beliebige Dimensionen analog, wenn ~ei die Vektoreneiner orthonormierten Basis sind.
26

O. Schimmel UMG Greiz Vektorrechnung
Beispiele: Berechnung einiger Skalarprodukte
(2
3
)◦
(3
−7
)= 2 · 3 + 3 · (−7) = −15
−211
◦−43
2
= (−2)(−4) + 1 · 3 + 1 · 2 = 13
2
0
2
4
◦−103
0
5
= 2 · (−10) + 0 + 0 + 4 · 5 = 0
5.3 Eigenschaften und Rechenregeln
Satz 5.4
Gegeben seien die Vektoren ~a, ~b und ~c eines beliebigen Vektorraumes. Dann gilt:
1. Einfluss des Nullvektors: ~0 ◦ ~a = 0
2. Kommutativgesetz: ~a ◦~b = ~b ◦ ~a
3. Distributivgesetz: (~a+~b) ◦ ~c = ~a ◦ ~c+~b ◦ ~c
Beweis:1. Teil:
~0 ◦ ~a =n∑
i=1
0 · ai = 0
2. Teil:
~a ◦~b =n∑
i=1
ai · bi =n∑
i=1
bi · ai = ~b ◦ ~a
3. Teil:
(~a+~b) ◦ ~c =n∑
i=1
(ai + bi) · ci =n∑
i=1
(aici + bici) =n∑
i=1
aibi +n∑
i=1
aici = ~a ◦ ~c+~b ◦ ~c
Eine Multiplikation der Form (~a ◦ ~b) ◦ ~c macht keinen Sinn, da das Produkt aus zweiVektoren eine Zahl ist und diese nicht als Faktor für ein Skalarprodukt in Frage kommt.
27

O. Schimmel UMG Greiz Vektorrechnung
5.4 Anwendungen des Skalarproduktes
5.4.1 Berechnung des Betrages von Vektoren
Mit Satz 5.2 können wir nun den Betrag bzw. die Norm des Vektors berechnen.
|~x| =√~x ◦ ~x =
√x21 + x22 + ...+ x2n
Spezialfälle:Wir bezeichnen die Koordinaten im Folgenden im R2 mit x und y und im R3 mit x, yund z und so folgt:
Im R2 gilt: |~a| =√x2a + y2a
und im R3 gilt: |~a| =√x2a + y2a + z2a
Beispiele: Berechnung einiger Vektorbeträge
∣∣∣∣∣(4
3
)∣∣∣∣∣ = √42 + 32 = 5
∣∣∣∣∣(a− 1√
2a
)∣∣∣∣∣ = √a2 − 2a+ 1 + 2a = a2 + 1
∣∣∣∣∣∣∣−26
11
∣∣∣∣∣∣∣ =
√(−2)2 + 62 + 112 =
√161
Für welche Zahl x entsteht ein Vektor mit dem Betrag 13 LE?∣∣∣∣∣∣∣ x
x+ 8
3
∣∣∣∣∣∣∣ = 13
2x2 + 16x+ 73 = 169
x2 + 8x− 48 = 0 ⇒ x1 = −12;x2 = 4
28

O. Schimmel UMG Greiz Vektorrechnung
5.4.2 Untersuchung auf Orthogonalität
Das Skalarprodukt kann genutzt werden, um Vektoren paarweise auf Orthogonalitätzu untersuchen, beziehungsweise diese Eigenschaft nachzuweisen. Dies ist besonders beigeometrischen Anwendungen wichtig. Wir nutzen dabei die Eigenschafft, dass das Ska-larprodukt den Wert Null annimmt, wenn die Vektoren zueinander orthogonal sind.
Beispiel 1: Sind die angegebenen Vektoren paarweise orthogonal?
2
−34
⊥−36
6
?
2
−34
◦−36
6
= −6− 18 + 24 = 0 ⇒ Vektoren senkrecht.
Beispiel 2: Für welche Werte von a sind die Vektoren zueinander orthogonal?
a
a− 3
2
⊥−21
6
?
a
a− 3
2
◦−21
6
= −2a+ a− 3 + 12 = 0 ⇒ a = 9
Für a = 9 sind die Vektoren orthogonal.
Beispiel 3: Ist das Dreieck ABC mit A(2; 3);B(5; 7);C(1; 10) rechtwinklig?
−→AB =
(3
4
);−→AC =
(−17
);−−→BC =
(−43
)
−→AB ◦
−→AC = −3 + 28 = 25 6= 0
−→AB ◦
−−→BC = −12 + 12 = 0
Das Dreieck ABC ist rechtwinklig beim Punkt B.
29

O. Schimmel UMG Greiz Vektorrechnung
Beispiel 4: Bestimmen Sie einen Vektor, der zu den beiden gegebenen Vektorenorthogonal ist.
−3−15
∧−21
2
.
xyz
◦−3−1
5
= −3x−y+5z = 0 ∧
xyz
◦−21
2
= −2x+y+2z = 0
Wir eliminieren y: −5x+ 7z = 0 ⇒ x =7
5z
Wir setzen ein: −2 · 75z + y + 2z = 0 ⇒ y =
4
5z
z = 5 ⇒ y = 4 ∧ x = 7 ⇒
7
4
5
Beispiel 5 Zeigen Sie, dass das Viereck ABCD mit A(0; 1; 2); B(-4; 5; 5); C(2;8; 9) und D(6; 4; 6) ein Rechteck ist.
Vektoren:−→AB =
−443
;−−→BC =
6
3
4
;−−→AD =
6
3
4
;−−→DC =
−443
Die Vektoren gegenüberliegender Seiten sind gleich, die Seiten selbstalso gleichlang und parallel. Damit ist das Viereck ein Parallelo-gramm.
−→AB ◦
−−→AD = −24 + 12 + 12 = 0
Der Winkel bei A ist ein rechter Winkel. Wegen der Parallelität dergegenüberliegenden Seiten sind alle Innenwinkel recht Winkel. Damitist das Viereck ein Rechteck.
30

O. Schimmel UMG Greiz Vektorrechnung
5.4.3 Berechnung von Winkeln
Wir leiten zunächst die Formel zur Berechnung eines Winkels aus zwei gegebenen Vek-toren her. Wir gehen von der Definiton des Skalarproduktes aus und stellen diese nachdem Kosinus des Winkels um.
~a ◦~b = |~a| · |~b| · cos^(~a,~b) | : ~a | : ~b
cos^(~a,~b) =~a ◦~b|~a| · |~b|
cos^(~a,~b) =a1b1 + a2b2 + ...+ anbn√
a21 + a22 + ...+ a2n ·√b21 + b22 + ...+ b2n
Damit können wir über den Kosinus beliebige Winkel berechnen.
Beispiel 1: Berechnen Sie den Winkel zwischen: ~a =
−325
∧ ~b =
−472
.
cos^(~a,~b) =12 + 14 + 10√
38√69
= ⇒ ^(−→AB,−→AC) = 48, 3◦
Beispiel 2: Berechnen Sie die Seitenlängen und Winkel im Dreieck ABC mitA(1; 2; 4); B(3; -2; 2) und C(4; 6; 5).
−→AB =
2
−4−2
−→AC =
3
4
1
;−−→BC =
1
8
3
.
Seitenlängen:|−→AB| =
√4 + 16 + 4 = 2
√6
|−→AC| =
√9 + 16 + 1 =
√26
|−−→BC| =
√1 + 64 + 9 =
√74
Winkel:
cos^(−→AB,−→AC) =
6− 16− 2
2√6√26
= −√6√26⇒ ^(
−→AB,−→AC) = 118, 7◦
cos^(−→BA,−−→BC) =
−2 + 32 + 6
2√6√74
=3√6√74⇒ ^(
−→BA,−−→BC) = 31, 3◦
^(−→CA,−−→CB) = 180◦ − 118, 7◦ − 31, 3◦ = 30◦
31

O. Schimmel UMG Greiz Vektorrechnung
5.4.4 Weitere Anwendungen
Das Skalarprodukt eignet sich auch zur Beweisführung. Hier wird besonders die Eigen-schaft genutzt, dass es verschwindet, wenn Orthogonalität besteht. Die Sätze sollte manvorher in vektorieller Form aufschreiben.
Beispiel 1: Satz des ThalesJeder Peripheriewinkel über dem Durchmesser eines Kreises ist einrechter Winkel.
Voraussetzung: ~r1 = −~r2, |~r1| = |~r2| = |~r3| = r
Behauptung: ~a⊥~bBeweis:
~a ◦~b = (−~r2 + ~r3) ◦ (−~r1 + ~r3)
= ~r1 ◦ ~r2 − ~r2 ◦ ~r3 − ~r1 ◦ ~r3 + ~r23
= −~r21 − (~r1 + ~r2) ◦ ~r3 + ~r23
= −r2 −~0 ◦ ~r3 + r2
= 0
Beispiel 2: Satz des Pythagoras (bezogen auf obige Figur)Voraussetzung: ~a⊥~bBehauptung: c2 = a2 + b2
Beweis:
c2 = ~c2
= (~a−~b)2
= ~a2 − 2~a ◦~b+~b2
= ~a2 +~b2
= a2 + b2
32
6 Vektorprodukt (Kreuzprodukt)von Vektoren
6.1 Definition des Vektorproduktes
Def 6.1
Gegeben seien zwei Vektoren ~a und ~b des R3. Dann heißt der Vektor mit den folgendenEigenschaften Vektorprodukt ~a×~b:
1. |~a×~b| = |~a| · |~b| · sin^(~a,~b)
2. (~a×~b)⊥~a ∧ (~a×~b)⊥~b
3. ~a, ~b und ~a×~b bilden ein Rechtssystem.
Bemerkungen:
1. Das Vektorprodukt ist ein Vektor und keine reelle Zahl.
2. Dieses Produkt gibt es nur im dreidimensionalen Raum.
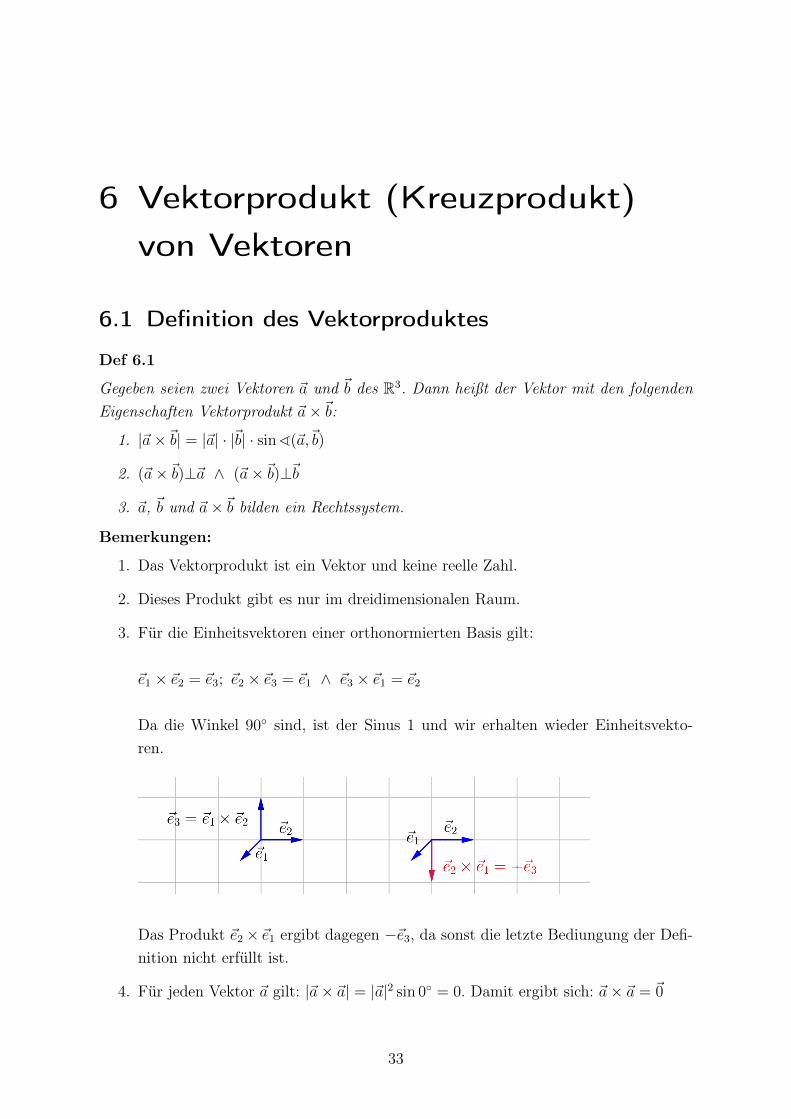
3. Für die Einheitsvektoren einer orthonormierten Basis gilt:
~e1 × ~e2 = ~e3; ~e2 × ~e3 = ~e1 ∧ ~e3 × ~e1 = ~e2
Da die Winkel 90◦ sind, ist der Sinus 1 und wir erhalten wieder Einheitsvekto-ren.
Das Produkt ~e2× ~e1 ergibt dagegen −~e3, da sonst die letzte Bediungung der Defi-nition nicht erfüllt ist.
4. Für jeden Vektor ~a gilt: |~a× ~a| = |~a|2 sin 0◦ = 0. Damit ergibt sich: ~a× ~a = ~0
33

O. Schimmel UMG Greiz Vektorrechnung
6.2 Eigenschaften des Kreuzproduktes
Satz 6.1
Gegeben seien die Vektoren ~a, ~b und ~c sowie λ ∈ R. Dann gilt:
1. Das Vektorprodukt ist antikommutativ:
~a×~b = −~b× ~a
2. Das Vektorprodukt erfüllt mit der Addition ein Distributivgesetz:
(~a+~b)× ~c = ~a× ~c+~b× ~c
3. Das Vektorprodukt ist bilinear:
λ(~a×~b) = (λ~a)×~b = ~a× (λ~b)
4. Wenn das Vektorprodukt den Nullvektor ergibt, ist einer der Faktoren der Nullvek-tor oder beide Vektoren sind kollinear.
~a×~b = ~0 ⇔ ~a = ~0 ∨ ~b = ~0 ∨ ~a||~b
Bemerkungen:
1. Die Eigenschaften 1., 3. und 4. ergeben sich direkt aus der Definition, lediglich dasDistributivgesetz ist etwas schwieriger nachzuweisen..
2. Das Kommutativgesetz gilt nicht, weil die Bedingung 3. aus der Definition nichterfüllt wäre.
3. Die Bilinearität lässt sich leicht aus der Formel der Definition herleiten, wenn mandazu ausnutzt, dass gilt ~a || λ~a.
Satz 6.2
Für die Einheitsvektoren der orthonormierten Basis gilt:
~e1 × ~e2 = ~e3 ~e2 × ~e3 = ~e1 ~e3 × ~e1 = ~e2
~e2 × ~e1 = −~e3 ~e2 × ~e3 = −~e1 ~e1 × ~e3 = −~e2
34

O. Schimmel UMG Greiz Vektorrechnung
6.3 Koordinatenform des Vektorproduktes
Satz 6.3
Gegeben seien die Vektoren ~a =
a1a2a3
und ~b =
b1b2b3
. Dann gilt:
~a×~b =
a2b3 − a3b2a3b1 − a1b3a1b2 − a2b1
Beweis: Wir benutzen die Rechengesetze und den Satz über die Produkte der
Einheitsvektoren.
~a×~b = (a1~e1 + a2~e2 + a3~e3)× (b1~e1 + b2~e2 + b3~e3)
= a1b1(~e1 × ~e1) + a1b2(~e1 × ~e2) + a1b3(~e1 × ~e3)+a2b1(~e2 × ~e1) + a2b2(~e2 × ~e2) + a2b3(~e2 × ~e3)+a3b1(~e3 × ~e1) + a3b2(~e3 × ~e2) + a3b3(~e3 × ~e3)
= ~0 + a1b2~e3 − a1b3~e2 − a2b1~e3 +~0 + a2b3~e1 + a3b1~e2 − a3b2~e1 +~0
= (a2b3 − a3b2)~e1 + (a3b1 − a1b3)~e2 + (a1b2 − a2b1)~e3
=
a2b3 − a3b2a3b1 − a1b3a1b2 − a2b1
Beispiele: Berechnung einiger Vektorprodukte
2
3
1
× 3
−75
=
3 · 5− 1 · (−7)1 · 3− 2 · 5
2 · (−7)− 3 · 3
=
22
−7−23
2
3
0
×4
5
0
=
3 · 0− 5 · 00 · 4− 2 · 02 · 5− 3 · 4
=
0
0
−2
35

O. Schimmel UMG Greiz Vektorrechnung
6.4 Anwendungen des Vektorproduktes
6.4.1 Berechnung von Flächen
Die Gleichung in der Definition: |~a ×~b| = |~a| · |~b| · sin^(~a,~b) kann man als Fläche desvon den Vektoren ~a und ~b aufgespannten Parallelogramms ABCD deuten. (Abbildung)Damit eignet sich das Vektorprodukt zur Flächenberechnung.
Auch
der Flächeninhalt des allgemeinen Dreiecks (hier ABD) lässt sich so leicht berechnen. Erist genau halb so groß, wie der des Parallelogramms und damit gilt:
Satz 6.4
Der Flächeninhalt des von zwei Vektoren−→AB und
−→AC aufgespannten Dreiecks ABC
beträgt:
A =1
2
∣∣∣−→AB ×−→AC∣∣∣Beispiel 1: Berechnen Sie den Flächeninhalt des Dreiecks ABC mit A(2; 0; 4),
B(5; -2; 3) und C(6; 2; 7).
−→AB ×
−→AC =
3
−2−1
×4
2
3
=
−4−1314
A =
1
2
√16 + 169 + 196 =
1
2
√381 FE
Bemerkung:Die Dreiecksberechnung auf diese Weise hat gleich mehrere Vorteile. Die Fläche lässtsich exakt berechnen, man kommt ohne Winkelfunktionen aus und sie funktioniert imR3 und R2 gleichermaßen, wie das folgende Beispiel zeigt. Es ist dabei egal, welche Seitendes Dreiecks man für das Vektorprodukt auswählt.
36
O. Schimmel UMG Greiz Vektorrechnung
Beispiel 2: Berechnen Sie den Flächeninhalt des Vierecks ABCD mit A(-2; -3),B(5; -2), C(4; 3) und D(-1; 5).Trick: z = 0 setzen:
−→AB ×
−→AC =
7
1
0
×6
6
0
=
0
0
36
−→AC ×
−−→AD =
6
6
0
×1
8
0
=
0
0
42
A =
1
2· 36 + 1
2· 42 = 39
Beispiel 3: Berechnen Sie den Oberflächeninhalt der Pyramide ABCD mitA(0; -1; -2); B(4; 4; 0); C(-2; -1; 1) und D(2; 2; 7)
−→AB ×
−→AC =
4
5
2
×−20
3
=
15
−1610
−→AB ×
−−→AD =
4
5
2
×2
3
9
=
39
−252
−→AC ×
−−→AD =
−203
×2
3
9
=
−924−6
−−→BC ×
−−→BD =
−6−51
×4
3
6
=
−3340
2
A =
1
2(√581 +
√2150 +
√693 +
√2693) ≈ 74, 35FE
37
O. Schimmel UMG Greiz Vektorrechnung
6.4.2 Berechnung von Normalenvektoren
In der analytischen Geometrie besteht häufig die Problematik, dass man einen zu einerebenen Fläche senkrechten Vektor sucht. Einen solchen Vektor nennt man Normalen-vektor. Sein Betrag kann dann beispielsweise in seiner Länge entsprechend angepasstals Höhe eines Körpers interpretiert werden. Er selbst könnte zur Bestimmung von Eck-punkten verwendet werden.Um orthogonale Vektoren zu bestimmen, nutzt man aus, dass das Vektorprodukt einen-Vektor liefert, der orthogonal zu den beiden Ausgangsvektoren ist.
Beispiel 1: Bestimmen Sie einen Vektor ~n mit möglichst kleinen ganzzahligenKoordinaten, der orthogonal auf der Ebene des Dreiecks ABC mitA(2; 3; 0), B(5; -2; -1) und C(-4; 1; 2) ist. Bestimmen Sie den Betragdes Vektors.
−→AB ×
−→AC =
3
−5−1
×−6−2
2
=
−120−36
Wir dividieren diesen Vektor noch durch (-3) und erhalten:
~n =
1
0
3
⇒ |~n| =√10
Eine Probe mit den Skalarprodukten zeigt, dass ~n diese Bedingungenerfüllt.
Beispiel 2: Gesucht ist ein Normaleneinheitsvektor zu ~a =
−103
; ~b =
2
2
−3
~a×~b =
−103
× 2
2
−3
=
−63−2
⇒ |~a×~b| = 7
Der gesuchte Einheitsvektor ist dann: ~ne =1
7
−63−2
38

O. Schimmel UMG Greiz Vektorrechnung
6.4.3 Weitere Anwendungen
Zwei Vektoren des R2 oder des R3 kann man auch mit Hilfe des Vektorproduktes aufParallelität untersuchen. Es gilt:
Wenn das Vektorprodukt ungleich dem Nullvektor ist, sind die Vektoren nicht paral-lel.
Beispiel: Untersuchen Sie ~a =
−12−1
; ~b =
4
−84
auf Parallelität.
~a×~b =
−12−1
× 4
−84
=
0
0
0
⇒ ~a||~b
Winkelberechnung mit dem Vektorprodukt ist zwar auch möglich, ist aber nicht unbe-dingt eine geeignete Variante, das es stets zwei mögliche Winkel gibt. Wenn man dieFormel der Definition umstellt erhält man:
sin^(~a~b) =|~a×~b||~a| · |~b|
Ein Beispiel verdeutlicht das Problem.
Beispiel: Berechnen Sie den Winkel zwischen ~a =
−12−1
und ~b =
3
1
2
.
sin^(~a,~b) =
∣∣∣∣∣∣∣−12−1
×3
1
2
∣∣∣∣∣∣∣∣∣∣∣∣∣∣
−12−1
∣∣∣∣∣∣∣∣∣∣∣∣∣∣3
1
2
∣∣∣∣∣∣∣=
√25 + 1 + 49√
6√14
= 0.9449
^(~a,~b) = 70, 89◦ ∨ ^(~a,~b) = 109, 11◦
39

O. Schimmel UMG Greiz Vektorrechnung
6.5 Mehrfache Produkte (extra)
6.5.1 Das Spatprodukt
Def 6.2
Gegeben seien drei Vektoren ~a, ~b und ~c des R3. Dann heißt das Produkt der Form:
(~a×~b) ◦ ~c)
Spatprodukt dieser drei Vektoren.
Bemerkungen:
1. Der Betrag des Spatproduktes entspricht dem Volumen des von den drei Vektorenaufgespannten Spats.
2. Das Volumen der von denselben Vektoren aufgespannten dreiseitigen PyramideABDE entspricht dann genau einem Sechstel des Betrages des Spatproduktes,womit sich das Produkt zur Berechnung von Rauminhalten gut eignet.
3. Wenn das Spatprodukt positiv ist, bilden die Vektoren ein Rechtssystem, wenn esnegativ ist ein Linkssystem.
4. Wenn das Spatprodukt der Vektoren gleich Null ist, sind die Vektoren linear ab-hängig, ist es ungleich Null sind sie unabhängig.
40
O. Schimmel UMG Greiz Vektorrechnung
Beispiel 1: Berechnen Sie (~a×~b) ◦ ~c): ~a =
−12−1
; ~b =
2
3
4
; ~c =
1
−12
(~a×~b) ◦ ~c =
−12−1
×2
3
4
◦
1
−12
=
11
2
−7
◦ 1
−12
= −5
Beispiel 2: Gegeben sind die Punkte A(-1; -2; -1), B(3; 2; 1), C(-2; 0; -1) undE(1; -1; 5).Berechnen Sie die Koordinaten der Punkte D, F, G und H, so dassein Spat ABCDEFGH entsteht. Ermitteln Sie Volumen und Ober-flächeninhalt des Spats.
−−→OD =
−→OA+
−−→BC =
−6−4−3
;−→OF =
−−→OB +
−→AE =
5
3
7
−→OG =
−→OC +
−→AE =
0
1
5
;−−→OH =
−−→OD +
−→AE =
−4−33
V =
∣∣∣(−→AB ×−−→AD) ◦−→AE∣∣∣
=
∣∣∣∣∣∣∣4
4
2
×−5−2−2
◦
2
−16
∣∣∣∣∣∣∣
=
∣∣∣∣∣∣∣−4−2
12
◦ 1
−12
∣∣∣∣∣∣∣
= 22 V E
AO =1
2
(∣∣∣−→AB ×−→AC∣∣∣+ ∣∣∣−→AB ×−−→AD∣∣∣+ ∣∣∣−→AC ×−−→AD∣∣∣+ ∣∣∣−−→BC ×−−→BD∣∣∣)=
1
2
∣∣∣∣∣∣∣4
4
2
×−5−2−2
∣∣∣∣∣∣∣+ 2
∣∣∣∣∣∣∣−5−2−2
× 2
−16
∣∣∣∣∣∣∣+ 2
∣∣∣∣∣∣∣4
4
2
× 2
−16
∣∣∣∣∣∣∣
= 2√164 + 2
√953 + 2
√1220
≈ 157, 2 FE
41

O. Schimmel UMG Greiz Vektorrechnung
Beispiel 3: Gegeben sind die Punkte A(-1; 2; -2), B(3; 4; 0), C(1; 3; 1) und D(3;1; 4).Zeigen Sie, dass die Punkte ein Tetraeder ABCD bilden und berech-nen Sie das Volumen und den Oberflächeninhalt.
V =1
6
∣∣∣(−→AB ×−→AC) ◦ −−→AD∣∣∣=
∣∣∣∣∣∣∣4
2
2
×2
1
3
◦
4
−16
∣∣∣∣∣∣∣
=1
6
∣∣∣∣∣∣∣ 4
−80
◦ 4
−16
∣∣∣∣∣∣∣
= 4 V E
AO =1
2
(∣∣∣−→AB ×−→AC∣∣∣+ ∣∣∣−→AB ×−−→AD∣∣∣+ ∣∣∣−→AC ×−−→AD∣∣∣+ ∣∣∣−−→BC ×−−→BD∣∣∣)=
1
2(√80 +
√596 +
√117 +
√101)
≈ 27, 1 FE
42

O. Schimmel UMG Greiz Vektorrechnung
6.5.2 Die bac-cab-Regel
Das Kreuzprodukt aus drei Vektoren kann man auf zwei Skalarprodukte verbunden mitder S-Multiplikation zurückführen. Eine Regel, die besonders in der Physik Anwendungfindet, ist die sogenannte bac-cab-Regel.
Satz 6.5
Gegeben seien drei Vektoren ~a, ~b und ~c des R3. Dann gilt:
~a× (~b× ~c) = ~b · (~a ◦ ~c)− ~c · (~a ◦~b)
Beweis:
~a× (~b× ~c) =
a1a2a3
×b2c3 − b3c2b3c1 − b1c3b1c2 − b2c1
=
a2(b1c2 − b2c1)− a3(b3c1 − b1c3)a3(b2c3 − b3c2)− a1(b1c2 − b2c1)a1(b1c3 − b3c1)− a2(b2c3 − b3c2)
~b · (~a ◦ ~c)− ~c · (~a ◦~b) =
b1b2b3
· (a1c1 + a2c2 + a3c3)−
c1c2c3
· (a1b1 + a2b2 + a3b3)
=
b1a1c1 + b1a2c2 + b1a3c3 − c1a1b1 − c1a2b2 − c1a3b3b2a1c1 + b2a2c2 + b2a3c3 − c2a1b1 − c2a2b2 − c2a3b3b3a1c1 + b3a2c2 + b3a3c3 − c3a1b1 − c3a2b2 − c3a3b3
=
b1a2c2 + b1a3c3 − c1a2b2 − c1a3b3b2a1c1 + b2a3c3 − c2a1b1 − c2a3b3b3a1c1 + b3a2c2 − c3a1b1 − c3a2b2
=
a2(b1c2 − b2c1)− a3(b3c1 − b1c3)a3(b2c3 − b3c2)− a1(b1c2 − b2c1)a1(b1c3 − b3c1)− a2(b2c3 − b3c2)
Die Übereinstimmung der Terme bestätigt die Gleichheit beider Ausdrücke.
43

O. Schimmel UMG Greiz Vektorrechnung
6.5.3 Die Jacobi-Identität
Für das Rechnen mit mehrfachen Produkten kann man manchmal die folgende Beziehungnutzen, die auch Jacobi-Identität genannt wird.
Satz 6.6
Gegeben seien drei Vektoren ~a, ~b und ~c des R3. Dann gilt:
~a× (~b× ~c) +~b× (~c× ~a) + ~c× (~a×~b) = ~0
Beweis:
Wir verwenden die bac-cab-Regel und das Kommutativgesetz des Skalarproduktes underhalten:
~a× (~b× ~c) +~b× (~c× ~a) + ~c× (~a×~b)= ~b(~a ◦ ~c)− ~c(~a ◦~b) + ~c(~b ◦ ~a)− ~a(~b ◦ ~c) + ~a(~c ◦~b)−~b(~c ◦ ~a)= ~a(~b ◦ ~c−~b ◦ ~c) +~b(~a ◦ ~c− ~a ◦ ~c) + ~c(~a ◦~b− ~a ◦~b)= ~a · 0 +~b · 0 + ~c · 0= ~0
44
Recommended

















