Gustavo Henrique Miron Batista - Engenharia Civil
Vetores
CURSO INTRODUTÓRIO DE MATEMÁTICA PARA ENGENHARIA 2016.2
2
O que é um vetor?
Um vetor é um segmento de reta orientado, que representa uma grandeza vetorial e contém três
informações : Módulo, direção e sentido.
• Módulo: Valor numérico mais unidade de medida,representada pelo comprimento do segmento;
• Direção: Dada pela inclinação da reta do segmentoem referência a uma reta vertical ou horizontal.
• Sentido: É a orientação, numa mesma direçãopodemos ter dois sentidos possíveis. Por exemplo,numa direção horizontal temos os sentidos: daesquerda para a direita e da direita para a esquerda.
Definição
Grandezas
• Grandeza Escalar: É aquela que para sua perfeitadeterminação necessitamos de um número e de umaunidade de medida. Ex: Área, Tempo, Massa,Temperatura, etc...
• Grandeza Vetorial: É aquela que só ficacompletamente determinada por um número, umaunidade de medida, uma direção e um sentido. Ex:Força, Velocidade, Deslocamento, etc...
3

Situação Problema
Considere a seguinte situação: o piloto de um barco a motoratravessa um rio com correnteza mantendo a proa do barcona direção vertical no sentido de baixo para cima. Saindo doponto P ele atinge o ponto X na margem oposta, por que issoacontece ?
4
Operações Vetoriais
Para descrever esse tipo de movimento, necessita-se deoperações vetoriais, que serão desenvolvidas com base nadefinição matemática de um vetor.
Operações Vetoriais :• Adição de vetores;• Subtração de vetores;• Decomposição de vetores;• Multiplicação de um vetor por um escalar.
5

Adição Vetorial
6
• Regra do polígono
Consiste em transportamos “a” e “b” de modo que a origemde um coincide com a extremidade do outro, sem modificarseus módulos, direção e sentidos. Ligamos a origem de “a”com a extremidade de “b”. O vetor “a + b” assim obtido é ovetor soma de “a” + “b”.

Adição Vetorial
• Regra do Paralelogramo
Nesse método transportamos “a” e “b” de modo que suasorigens coincidem, sem modificar seus módulos, direções esentidos. Pela extremidade de cada vetor traça-se uma retaparalela ao outro, obtendo-se um paralelogramo. O vetorsoma “S” corresponde à diagonal desse paralelogramo, comorigem na origem comum de “a” e “b” .
7

Adição Vetorial
• Nessa regra, sendo α o ângulo formado entre asdireções de “a” e “b”, o módulo do vetor soma “S” édado por:
S² = a² + b² + 2. a. b. cosα
8
Subtração Vetorial
9
Para efetuar a diferença entre dois vetores “a” e“b”, pode-se usar qualquer uma das regrasdescristas anteriormente, levando-se em conta que:
S = a – b = a + (-b)
Ou seja, a diferença entre dois vetores é operada coma a soma do primeiro com o vetor oposto do segundo.
Obs: “-b” é o oposto de “b” (vetor com o mesmo módulo, mesma direção e sentido oposto ao de “b”).
Multiplicação de um vetor por um escalar
Consideramos um número real K ≠ 0 e um vetor “a” ≠0. O produto de K por “a” é um vetor “w” cujascaracterísticas são :
• I m I = I K I x I a I• A direção de “w” é a mesma de “a”.• Se K > 0, “w” tem o mesmo sentido de “a”; se K < 0, “w”tem sentido oposto ao de “a”.
Observações:
Se K = 0 ou “a” = 0, o produto deles é o vetor nulo.Se K = -1, o produto deles será o oposto de “a”.
10
Vamos praticar...
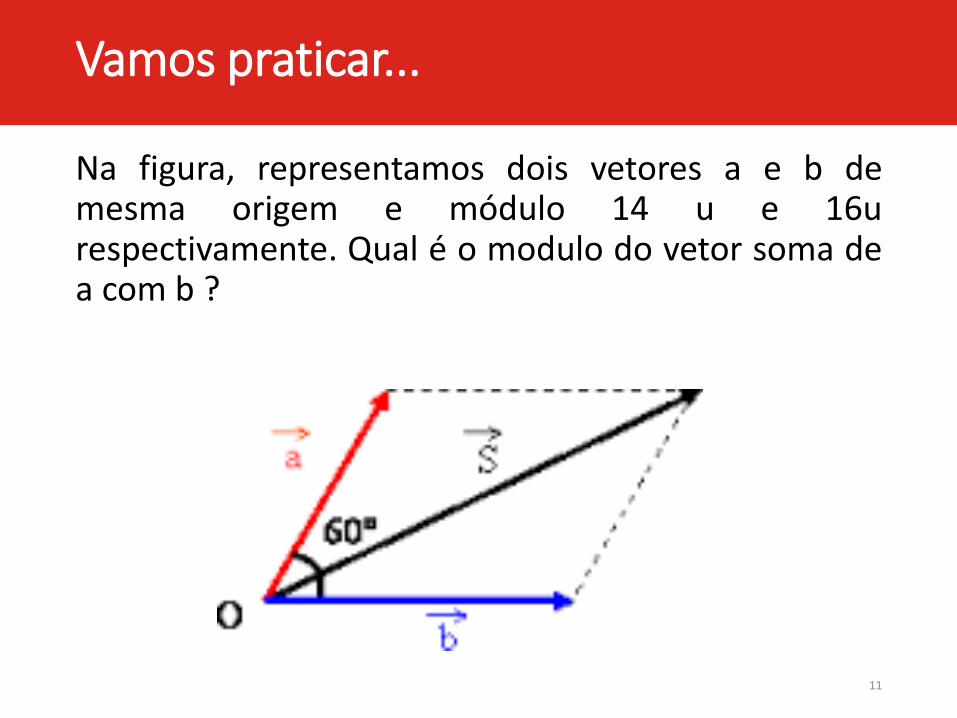
Na figura, representamos dois vetores a e b demesma origem e módulo 14 u e 16urespectivamente. Qual é o modulo do vetor soma dea com b ?
11
S
Decomposição Vetorial
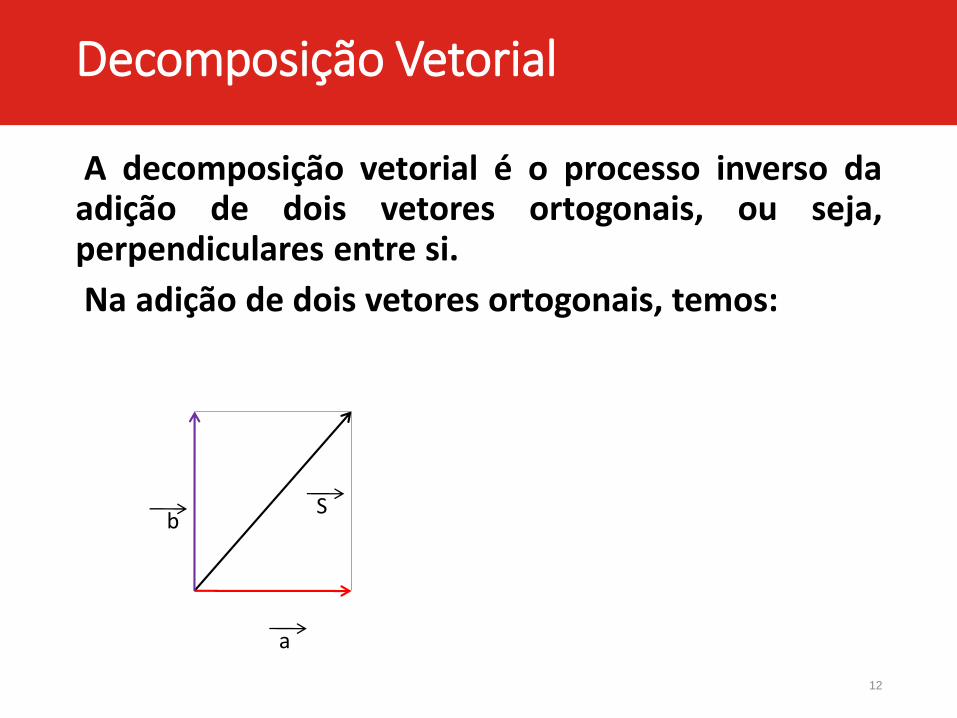
A decomposição vetorial é o processo inverso daadição de dois vetores ortogonais, ou seja,perpendiculares entre si.
Na adição de dois vetores ortogonais, temos:
12
a
b
Decomposição Vetorial
13
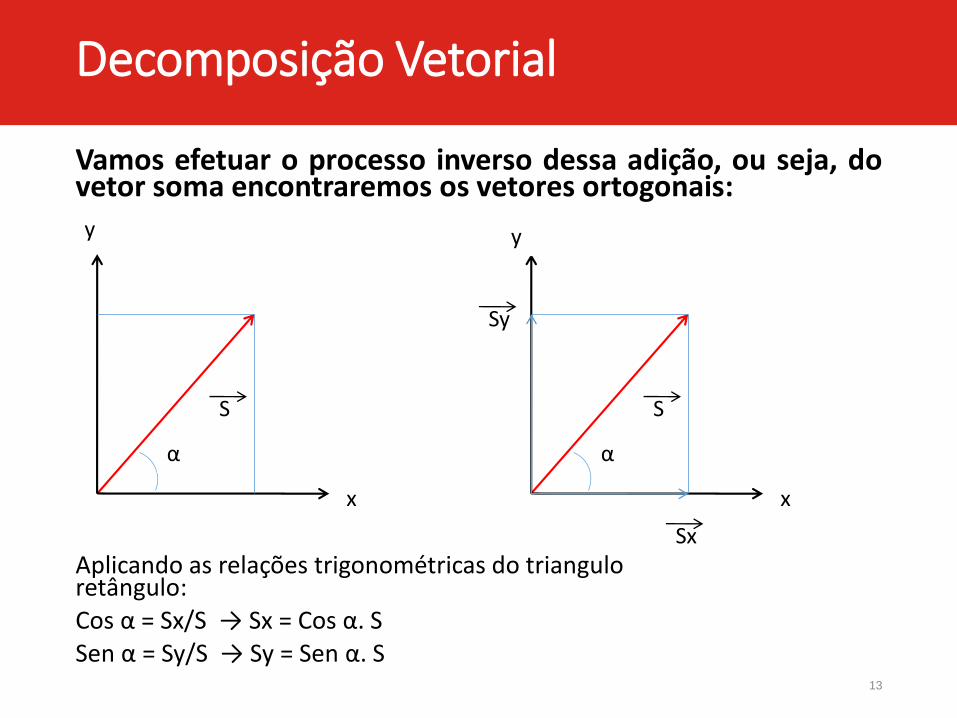
Vamos efetuar o processo inverso dessa adição, ou seja, dovetor soma encontraremos os vetores ortogonais:
Aplicando as relações trigonométricas do triangulo retângulo:Cos α = Sx/S → Sx = Cos α. SSen α = Sy/S → Sy = Sen α. S
S
x
y
S
x
y
α α
Sx
Sy

Decomponha a força P :
14
Vamos praticar...
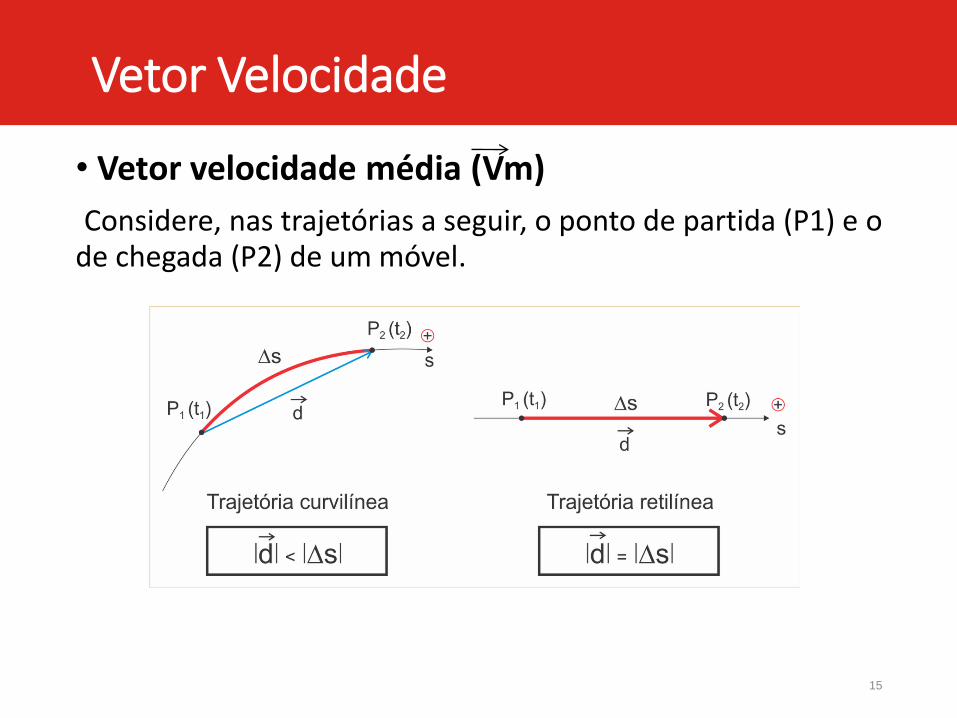
• Vetor velocidade média (Vm)
Considere, nas trajetórias a seguir, o ponto de partida (P1) e ode chegada (P2) de um móvel.
15
Vetor Velocidade
Vetor Velocidade
Nos esquemas anteriores :
• ∆s representa o deslocamento escalar, medido com base natrajetória do móvel desde o espaço de partida até o dechegada. Assim, a velocidade escalar média é dada por:
Vm = ∆s/ ∆t
• d representa o deslocamento vetorial, medido pelo vetor que “une” o ponto de partida ao ponto de chegada. Dessa maneira:
Intensidade : Vm = IdI/ ∆t
Velocidade vetorial média Direção : a mesma de d
Sentido : o mesmo de d
16
Vetor Velocidade
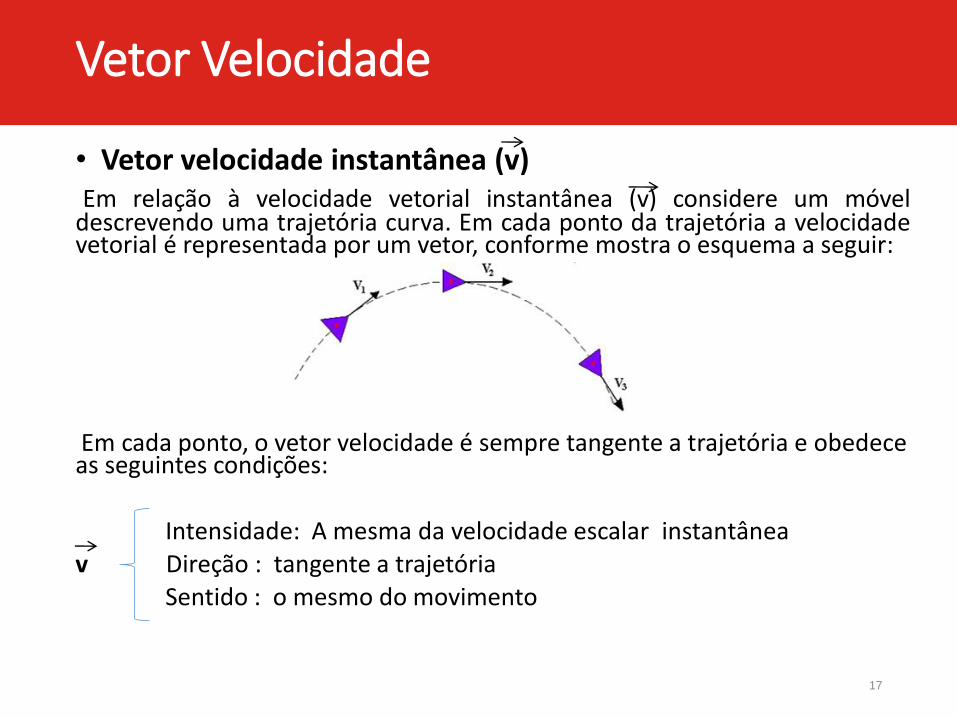
• Vetor velocidade instantânea (v)Em relação à velocidade vetorial instantânea (v) considere um móvel
descrevendo uma trajetória curva. Em cada ponto da trajetória a velocidadevetorial é representada por um vetor, conforme mostra o esquema a seguir:
Em cada ponto, o vetor velocidade é sempre tangente a trajetória e obedece as seguintes condições:
Intensidade: A mesma da velocidade escalar instantâneav Direção : tangente a trajetória
Sentido : o mesmo do movimento
17

Vetor Acaleração
A aceleração vetorial instantânea (a), que é aaceleração vetorial em cada ponto da trajetória, érepresentada por um vetor que pode formar umângulo qualquer entre 0º e 180º com o vetorvelocidade.
18
a
α
Vetor Aceleração
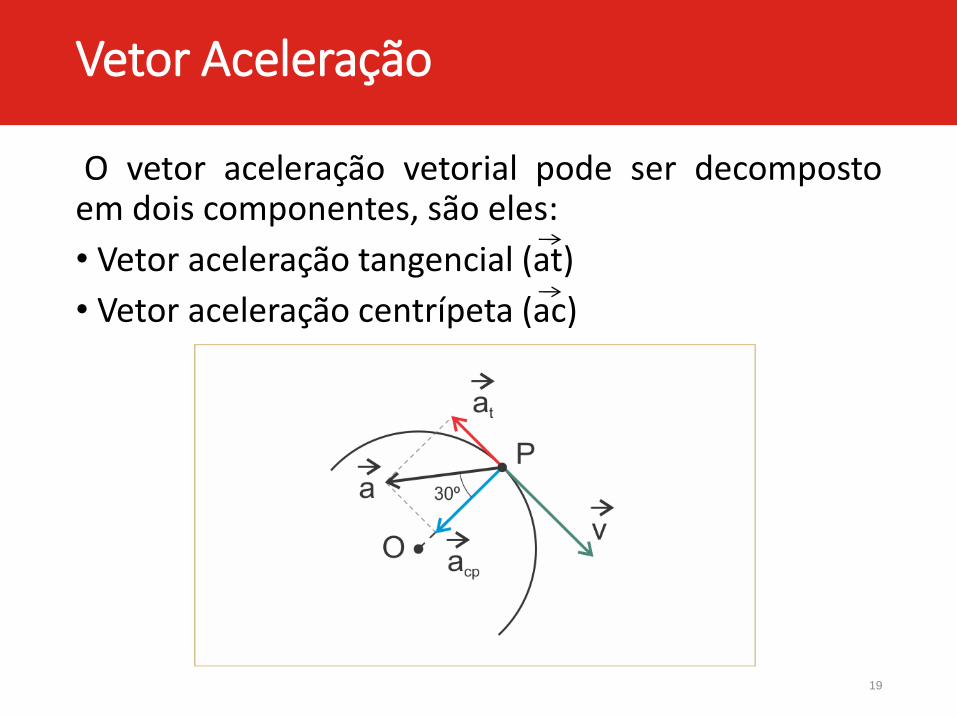
O vetor aceleração vetorial pode ser decompostoem dois componentes, são eles:
• Vetor aceleração tangencial (at)
• Vetor aceleração centrípeta (ac)
19
Vetor Aceleração
• Aceleração Tangencial : A existência dessaaceleração significa que o módulo do vetorvelocidade é variável. Portanto, a aceleraçãotangencial existe nos movimentos variados, mas nãonos movimentos uniformes.
O vetor aceleração tangencial obedece as seguintescondições:
Intensidade : coincide com o módulo da velocidade escalar
at Direção : a mesma do vetor velocidade
Sentido : o mesmo de v nos movimentos acelerados e contrário ao de v nos movimentos retardados
20
Vetor Aceleração
• Aceleração Centrípeta : A existência dessaaceleração significa que a direção do vetorvelocidade é variável. Portanto a aceleraçãocentrípeta existe nos movimentos curvilíneos, masnão existe nos movimentos retilíneos.
O vetor aceleração centrípeta obedece as seguintescondições :
Intensidade : ac = v²/r (em que r é o raio da trajetória curvilínea)
ac Direção : radial (coincide com o raio da trajetória)
Sentido : dirigida para o centro da curva
21
Características dos Movimentos
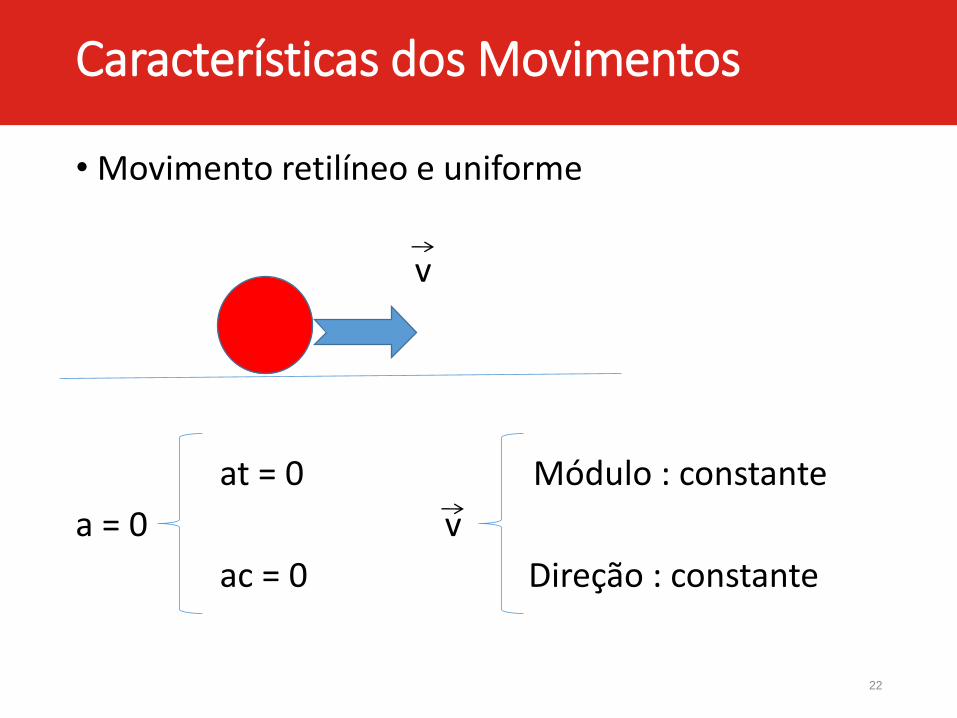
• Movimento retilíneo e uniforme
v
at = 0 Módulo : constante
a = 0 v
ac = 0 Direção : constante
22
Características dos Movimentos
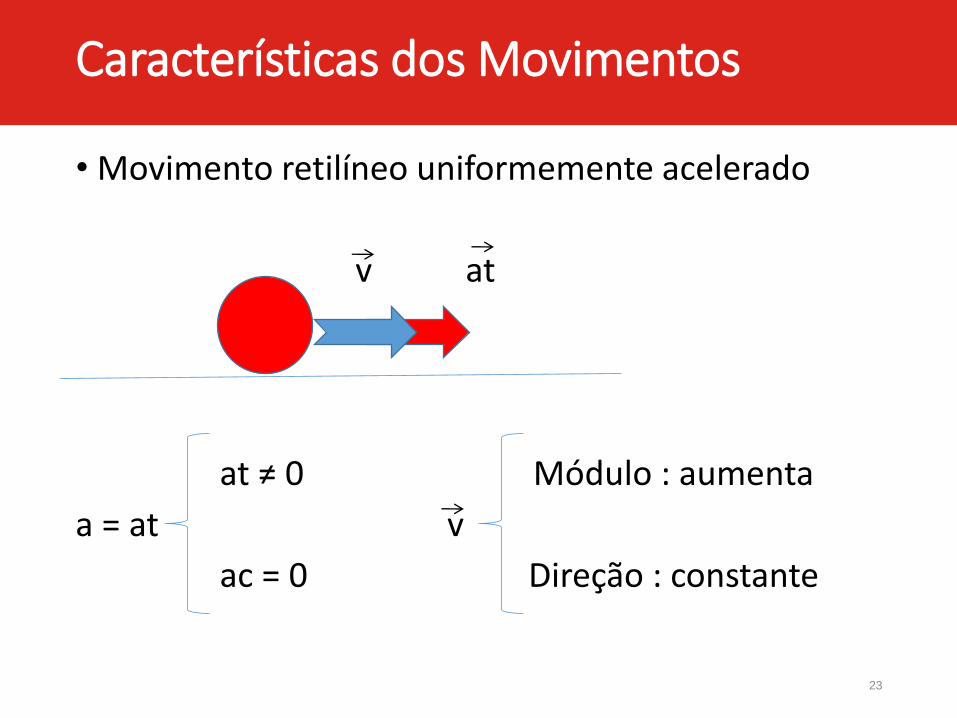
• Movimento retilíneo uniformemente acelerado
v at
at ≠ 0 Módulo : aumenta
a = at v
ac = 0 Direção : constante
23
Características dos Movimentos
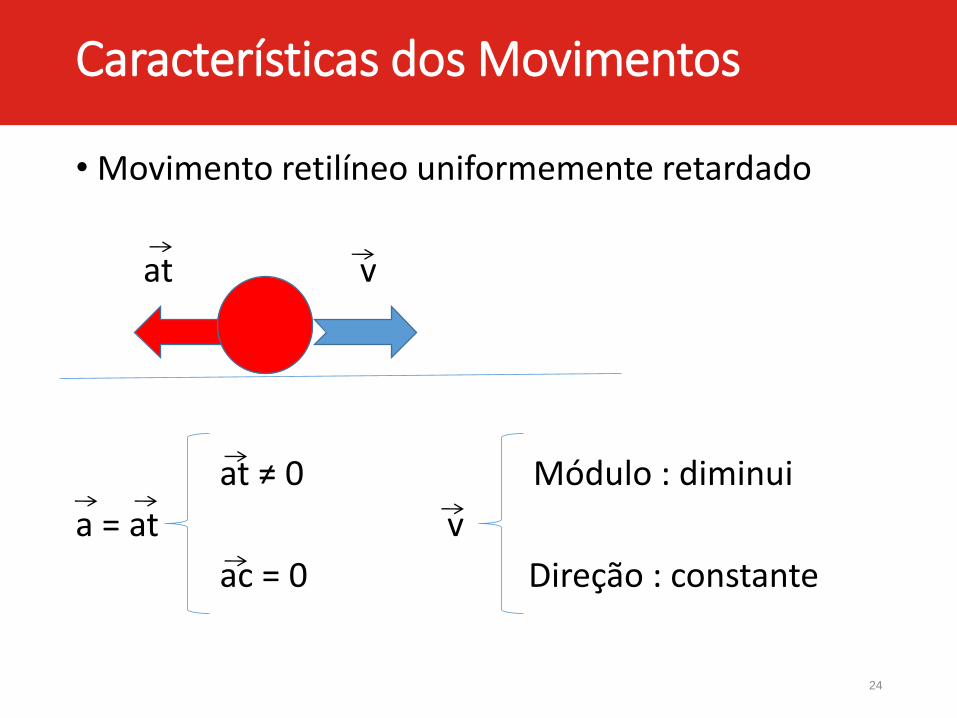
• Movimento retilíneo uniformemente retardado
at v
at ≠ 0 Módulo : diminui
a = at v
ac = 0 Direção : constante
24
Características dos Movimentos
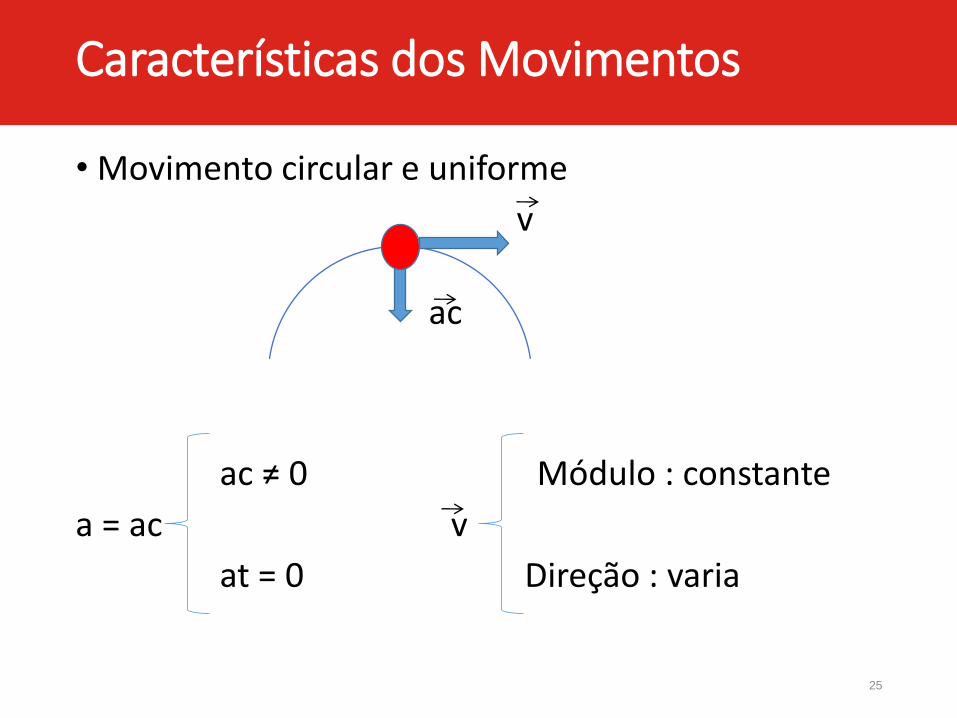
• Movimento circular e uniforme
v
ac ≠ 0 Módulo : constante
a = ac v
at = 0 Direção : varia
25
ac
Características dos Movimentos
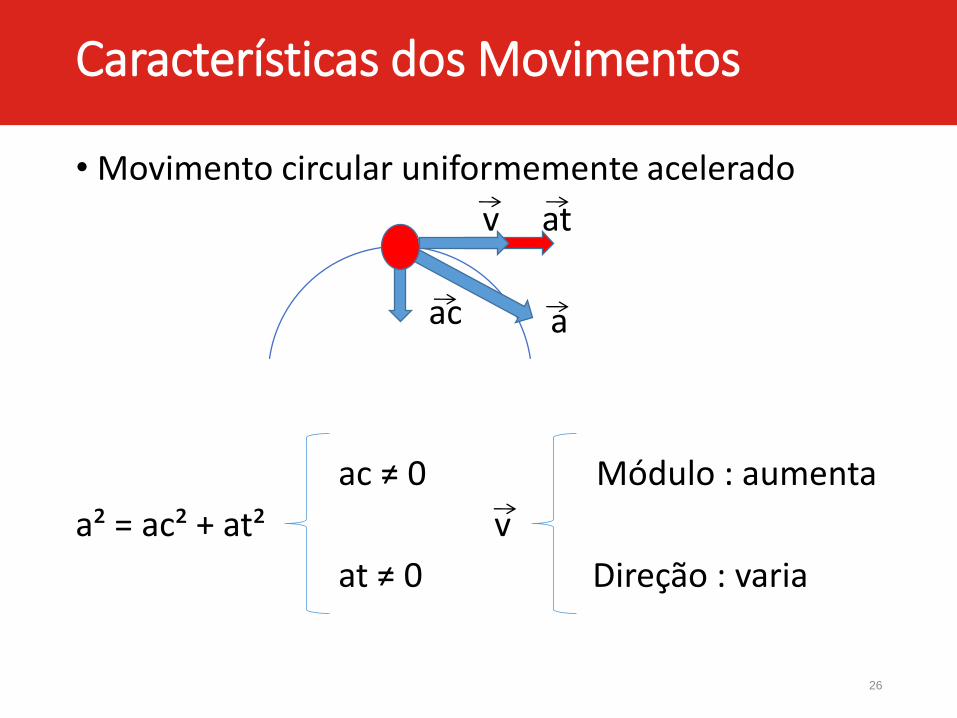
• Movimento circular uniformemente acelerado
v at
a
ac ≠ 0 Módulo : aumenta
a² = ac² + at² v
at ≠ 0 Direção : varia
26
ac

Características dos Movimentos
• Movimento circular uniformemente retardado
at v
a
ac ≠ 0 Módulo : diminui
a² = ac² + at² v
at ≠ 0 Direção : varia
27
ac

Vamos praticar...
28
Vamos praticar...
29
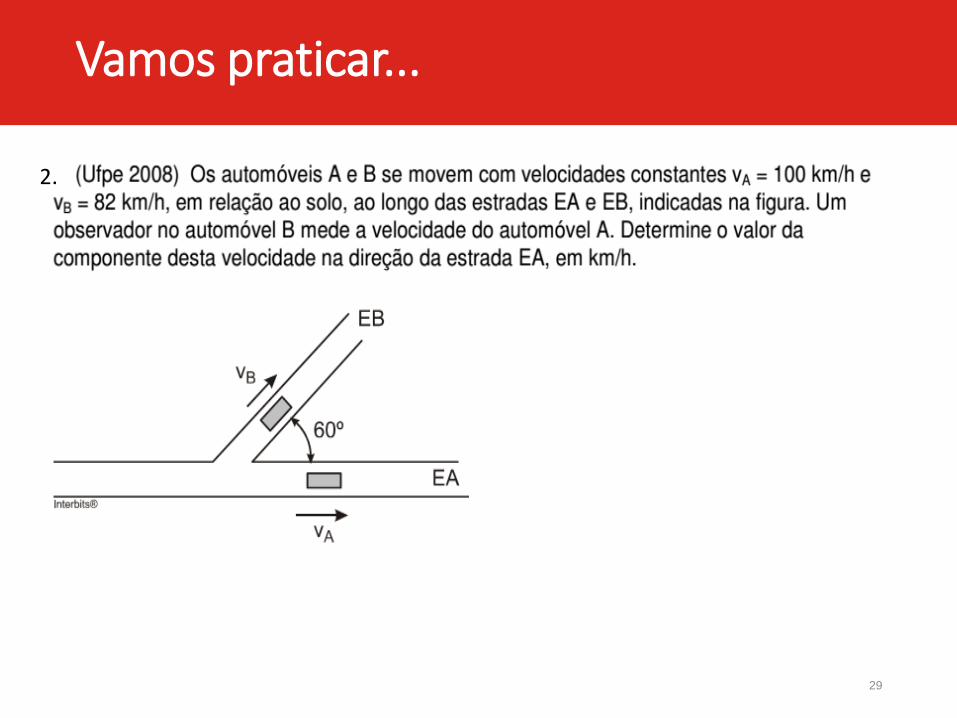
2.

30
Obrigado pela atenção!
www.facebook.com/PETEngenharias
www.ufal.edu.br
Recommended