Embed Size (px)
Citation preview

ロボットさんの
ロボット家電と制御ぐんぐん
ホームエレクトロニクス開発学科山崎研究室 yamalab.com
制御の基本は
モデルを知ること!

ホームエレクトロニクス開発学科山崎研究室 yamalab.com
各標準形の単位ステップ応答(1)
主なラプラス変換
○ラプラス変換の定義
𝑡 ≥ 0で定義される時間関数 𝑓 𝑡 があるとき
𝐹 𝑠 = ℒ 𝑓 𝑡 = 0
∞
𝑓 𝑡 𝑒−𝑠𝑡𝑑𝑡
を 𝑓 𝑡 のラプラス変換とよぶ。
Point!ラプラス変換を用いて時間 t の関数を s 関数に変換することによ
り,時間t 領域の微分方程式を, s 領域の代数方程式として解くこ
とができます。以下に主なラプラス変換を示します。
関数の種類 応答波形時間t 領域の表現
𝒇 𝒕 = 𝓛−𝟏 𝑭 𝒔
s 領域の表現
𝑭 𝒔 = 𝓛 𝒇 𝒕
単位ステップ関数 11
𝑠
べき関数 𝑡𝑛𝑛!
𝑠𝑛+1
指数関数 𝑒−𝑎𝑡1
𝑠 + 𝑎
正弦関数 sin𝜔𝑡𝜔
𝑠2 + 𝜔2
余弦関数 cos𝜔𝑡𝑠
𝑠2 +𝜔2
𝑡
𝑦(𝑡)1
0
𝑡
𝑦(𝑡)
0
𝑡
𝑦(𝑡)𝑎 > 01
0
𝑡
𝑦(𝑡)
0
𝑡
𝑦(𝑡)
0

ホームエレクトロニクス開発学科山崎研究室 yamalab.com
各標準形の単位ステップ応答(2)
主なラプラス変換の性質
Point!上にラプラス変換の主な性質を示します。これらの性質と,前の
ページで示した主なラプラス変換の式を用いて,ラプラス変換,ラ
プラス逆変換を行います。主なラプラス変換,および各法則はラプ
ラス変換の定義式から導くことができますので,一度導出してみる
とよいでしょう。
時間t 領域の表現
𝒇 𝒕 = 𝓛−𝟏 𝑭 𝒔
s 領域の表現
𝑭 𝒔 = 𝓛 𝒇 𝒕
線形則 𝑎𝑓 𝑡 + 𝑏𝑔(𝑡) 𝑎𝐹 𝑠 + 𝑏𝐺(𝑠)
相似則 𝑓 𝑎𝑡1
𝑎𝐹𝑠
𝑎
s 推移則 𝑒−𝑎𝑡𝑓 𝑡 𝐹 𝑠 + 𝑎
t 推移則 𝑓 𝑡 − 𝑎 𝑒−𝑎𝑠𝐹 𝑠
微分則𝑑
𝑑𝑡𝑓 𝑡 𝑠𝐹 𝑠 − 𝑓 0
積分則 0
𝑡
𝑓 𝜏 𝑑𝜏1
𝑠𝐹 𝑠 −
1
𝑠𝑓′ 0

ホームエレクトロニクス開発学科山崎研究室 yamalab.com
各標準形の単位ステップ応答
(1)1次遅れ要素の単位ステップ応答
○ブロック線図
○ s 関数での出力:𝑦 s
出力 𝑦 𝑠 = 𝐺 𝑠 ∙ 𝑢(𝑠) =𝐾
𝑇𝑠+1∙1
𝑠
○時刻 t の関数形式での出力:𝑦 𝑡
出力 𝑦 𝑡 = ℒ−1 𝑦 𝑠 = ℒ−1𝐾
𝑇𝑠+1∙1
𝑠= 𝐾(1 − 𝑒−
𝑡
𝑇)
単位ステップ入力
𝑢 𝑠 =1
𝑠
○パラメタ同定 ex.1) アクセルの応答
Point!
𝑦 𝑠
𝐺 𝑠 =𝐾
𝑇𝑠 + 1
応答は右図のようになります。最終値の定理より
lim𝑡→∞
𝑦 𝑡 = lim𝑠→0𝑠𝑦 𝑠 = lim
𝑠→0𝑠 ∙
𝐾
𝑇𝑠+1∙1
𝑠= 𝐾
となり,𝑦(𝑡)はゲイン𝑲に収束します。
一方,時定数𝑇に関しては,𝑡 = 𝑇のとき
𝑦 𝑇 = 𝐾 1 − 𝑒−𝑇
𝑇 = 𝐾 1 −1
𝑒= 0.632𝐾
なので,定常状態の63.2%に達するまでの時間が時定数 𝑻となります。
𝑡 [sec]
𝑣 𝑡 [𝑘𝑚/ℎ]
60.0
0.632 × 60.0
5.0
𝑡
𝑦(𝑡)
𝐾
0.632𝐾
𝑇
自動車のアクセルの踏み込み量と速度の関係を求め
る。右図で示すようにアクセルの踏み込み量を大きさ
1でステップ状に与えたとき,速度はグラフのように
ほぼ一次遅れ要素の特性を示した。
このときの伝達関数を求めよ。
解)グラフより𝐾 = 60.0 [km/h],T = 5.0 [sec] なので
𝐺 𝑠 =60.0
5.0𝑠+1
図1-1.1次遅れ要素の単位ステップ応答
𝑦 𝑡 = 𝐾(1 − 𝑒−𝑡𝑇)
図1-2 .自動車の速度応答
0
アクセル
1
2
ホームエレクトロニクス開発学科山崎研究室 yamalab.com
各標準形の単位ステップ応答
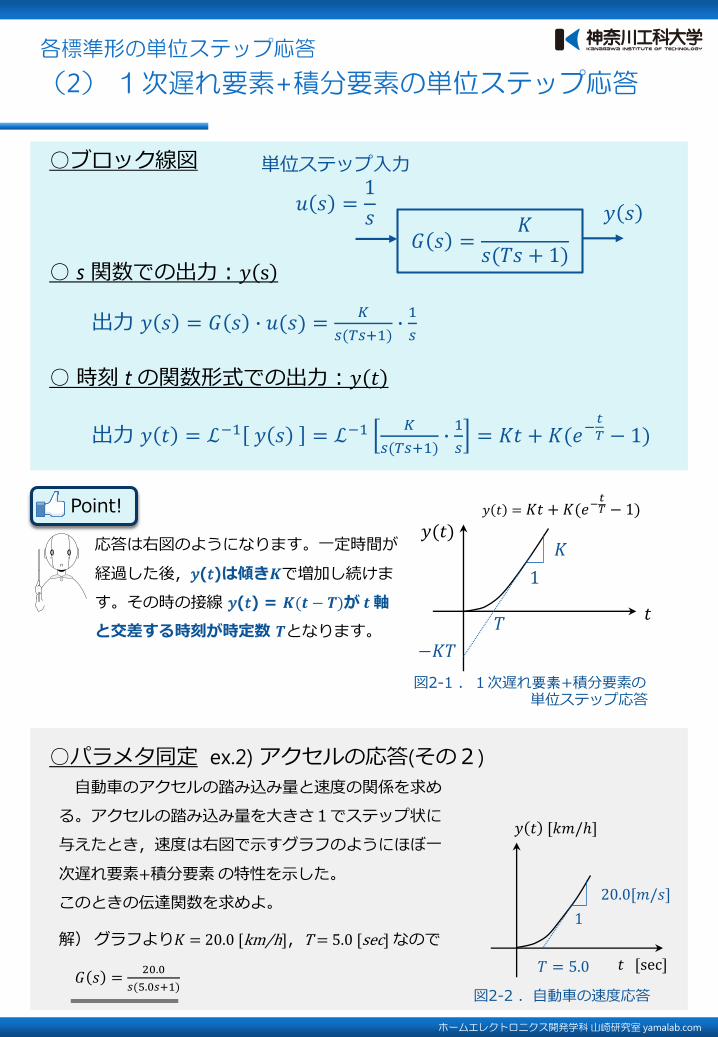
(2)1次遅れ要素+積分要素の単位ステップ応答
○ブロック線図
○ s 関数での出力:𝑦 s
出力 𝑦 𝑠 = 𝐺 𝑠 ∙ 𝑢(𝑠) =𝐾
𝑠(𝑇𝑠+1)∙1
𝑠
○時刻 t の関数形式での出力:𝑦 𝑡
出力 𝑦 𝑡 = ℒ−1 𝑦 𝑠 = ℒ−1𝐾
𝑠(𝑇𝑠+1)∙1
𝑠= 𝐾𝑡 + 𝐾(𝑒−
𝑡
𝑇 − 1)
単位ステップ入力
𝑢 𝑠 =1
𝑠
○パラメタ同定 ex.2) アクセルの応答(その2)
Point!
𝑦 𝑠
𝐺 𝑠 =𝐾
𝑠(𝑇𝑠 + 1)
応答は右図のようになります。一定時間が
経過した後,𝑦(𝑡)は傾き𝑲で増加し続けま
す。その時の接線 𝑦(𝑡) = 𝑲(𝒕 − 𝑻)が 𝒕軸
と交差する時刻が時定数 𝑻となります。
𝑡 [sec]
𝑦 𝑡 [𝑘𝑚/ℎ]
𝑇 = 5.0
自動車のアクセルの踏み込み量と速度の関係を求め
る。アクセルの踏み込み量を大きさ1でステップ状に
与えたとき,速度は右図で示すグラフのようにほぼ一
次遅れ要素+積分要素の特性を示した。
このときの伝達関数を求めよ。
解)グラフより𝐾 = 20.0 [km/h],T = 5.0 [sec] なので
𝐺 𝑠 =20.0
𝑠(5.0𝑠+1)
図2-1 .1次遅れ要素+積分要素の単位ステップ応答
図2-2 .自動車の速度応答
𝑦 𝑡 = 𝐾𝑡 + 𝐾(𝑒−𝑡𝑇 − 1)
𝑡
𝑦(𝑡)𝐾
𝑇
1
−𝐾𝑇
20.0[𝑚/𝑠]
1

ホームエレクトロニクス開発学科山崎研究室 yamalab.com
各標準形の単位ステップ応答
(3)2次遅れ要素の単位ステップ応答(その1)
○ブロック線図
○ s 関数での出力:𝑦 s
出力 𝑦 𝑠 = 𝐺 𝑠 ∙ 𝑢(𝑠) =𝐾𝜔𝑛
2
𝑠2+2𝜁𝜔𝑛𝑠+𝜔𝑛2 ∙1
𝑠
単位ステップ入力
𝑢 𝑠 =1
𝑠
Point!
𝑦 𝑠
𝐺 𝑠 =𝐾𝜔𝑛
2
𝑠2 + 2𝜁𝜔𝑛𝑠 + 𝜔𝑛2
2次遅れ要素の単位ステップ応答は減衰係数
比 𝜁 の大きさに応じて4種類の形になります。
(1) 𝜁 = 0 のとき 持続振動(減衰しない)
(2) 0 < 𝜁 < 1のとき 減衰振動
(3) 𝜁 = 1のとき 臨界減衰
(4) 1< 𝜁のとき 加減衰(振動しない)
右図で各形状を確認してください。 図3-1 .2次遅れ要素の単位ステップ応答
○時刻 t の関数形式での出力:𝑦 𝑡
(1) 𝜁 = 0 のとき [持続振動(減衰しない)]
(2) 0 < 𝜁 < 1のとき [減衰振動]
𝑦 𝑡 = 𝐾 1 −𝑒−𝜁𝜔𝑛𝑡
1−𝜁2sin 𝑞𝑡 + ∅
𝑞 = 1 − 𝜁2𝜔𝑛 (減衰自由各周波数), ∅ = tan−11−𝜁2
𝜁
𝑡
𝑦(𝑡)
𝐾
𝜁 = 0
𝜁 = 0.4
𝜁 = 3
𝜁 = 1

ホームエレクトロニクス開発学科山崎研究室 yamalab.com
各標準形の単位ステップ応答
(3)2次遅れ要素の単位ステップ応答(その2)
Point!
2次遅れ要素では,とくに
(2) 0 < 𝜁 < 1のとき 減衰振動
を扱う場合が多いので,次にその指標を示します。
●パラメータ同定に必要な指標
ゲイン定数𝑲 (単位ステップ応答では定常値)
最大行き過ぎ時間 𝑻𝒎𝒂𝒙 (最初のピークまでの時間)
最大ピーク値 𝒚𝒎𝒂𝒙 (最大行き過ぎ時間での出力値)
●即応性に関する指標
立ち上がり時間 𝑻𝒓 (応答の定常値の10%から90%に至るまでの時間)
遅れ時間 𝑻𝒅 (応答の定常値の50%に達するまでの時間)
●減衰性に関する指標
オーバーシュート量 𝐴𝑚𝑎𝑥 (= 𝒚𝒎𝒂𝒙 −𝑲)
整定時間 𝑻𝒔 (応答が定常値の±5%または±2%に留まるのに要する時間)
○時刻 t の関数形式での出力:𝑦 𝑡 (つづき)
(3) 𝜁 = 1 のとき [臨界減衰]
𝑦 𝑡 = 𝐾 1 − 𝑒−𝜔𝑛𝑡(1 + 𝜔𝑛𝑡)
(4) 1 < 𝜁のとき [加減衰(振動しない)]
𝑦 𝑡 = 𝐾 1 − 𝑒−𝜁𝜔𝑛𝑡𝜁+ 𝜁2−1
2 𝜁2−1𝑒𝑞
′𝑡 −𝜁− 𝜁2−1
2 𝜁2−1𝑒−𝑞
′𝑡
𝑞′ = 𝜁2 − 1𝜔𝑛
図3-2 .減衰振動の各指標
𝑡
𝑦(𝑡)
𝐾
𝑻𝒎𝒂𝒙
𝒚𝒎𝒂𝒙
0.9𝐾
0.1𝐾
𝑇𝑟
𝐴𝑚𝑎𝑥
0.5𝐾
𝑇𝑑 𝑇𝑠
減衰振動の指標

各標準形の単位ステップ応答
(3)2次遅れ要素の単位ステップ応答(その3)
○パラメタ同定 ex.3) RLC回路の応答
右図で示すRLC回路に単位ステップ電圧を印加し
たとき,グラフのような時間応答を示した。このと
きの伝達関数を求めよ。
解)グラフより𝐾 = 5.0 [V],𝑇𝑚𝑎𝑥=0.2[sec],
𝑦𝑚𝑎𝑥 = 5.5[V]なので
𝜔𝑛 =1
0.2ln
5.0
5.5−5.0
2+
𝜋
0.2
2= 19.48 [rad/sec]
𝜁 =1
19.48×0.2ln
2
2.2−2.0= 0.5912
よって 𝐺 𝑠 =5.0×19.482
𝑠2+2×0.5912×19.48+19.482=
1900
𝑠2+23.0𝑠+379
Point!減衰振動の応答波形を示す2次遅れ要素に関して,その答波形から伝達関数
のパラメータ(ゲイン𝐾,固有角周波数𝜔𝑛,減衰係数比 𝜁)を同定できます。
0 < 𝜁 < 1の減衰振動では,最大行き過ぎ時間 𝑇𝑚𝑎𝑥は 𝑦(𝑡) を時間微分して0
になる時刻なので, 𝑇𝑚𝑎𝑥 = 𝜋
1−𝜁2𝜔𝑛
となります。この時の最大ピーク値は次のとおりです。
𝑦𝑚𝑎𝑥 = 𝑦(𝑇𝑚𝑎𝑥) = 𝐾(1 + 𝑒−𝜁𝜔𝑛𝑇𝑚𝑎𝑥) 。
この2式より上記の固有角周波数𝜔𝑛,減衰係数比 𝜁を得ることができます。
○減衰振動のパラメタ同定
ゲイン定数𝐾 : 応答波形から得る
固有角周波数 𝜔𝑛 =1
𝑇𝑚𝑎𝑥ln
𝐾
𝑦𝑚𝑎𝑥−𝐾
2+
𝜋
𝑇𝑚𝑎𝑥
2
減衰係数比 𝜁 =1
𝜔𝑛𝑇𝑚𝑎𝑥ln
𝐾
𝑦𝑚𝑎𝑥−𝐾
図3-3 .RLC回路のステップ応答
𝑡[sec]
𝑦 𝑡 [V]
0.2
5.05.5
L [H]
C [F]u(t) [V]
R [Ω]
y(t) [V]
ホームエレクトロニクス開発学科山崎研究室 yamalab.com
ホームエレクトロニクス開発学科山崎研究室 yamalab.com
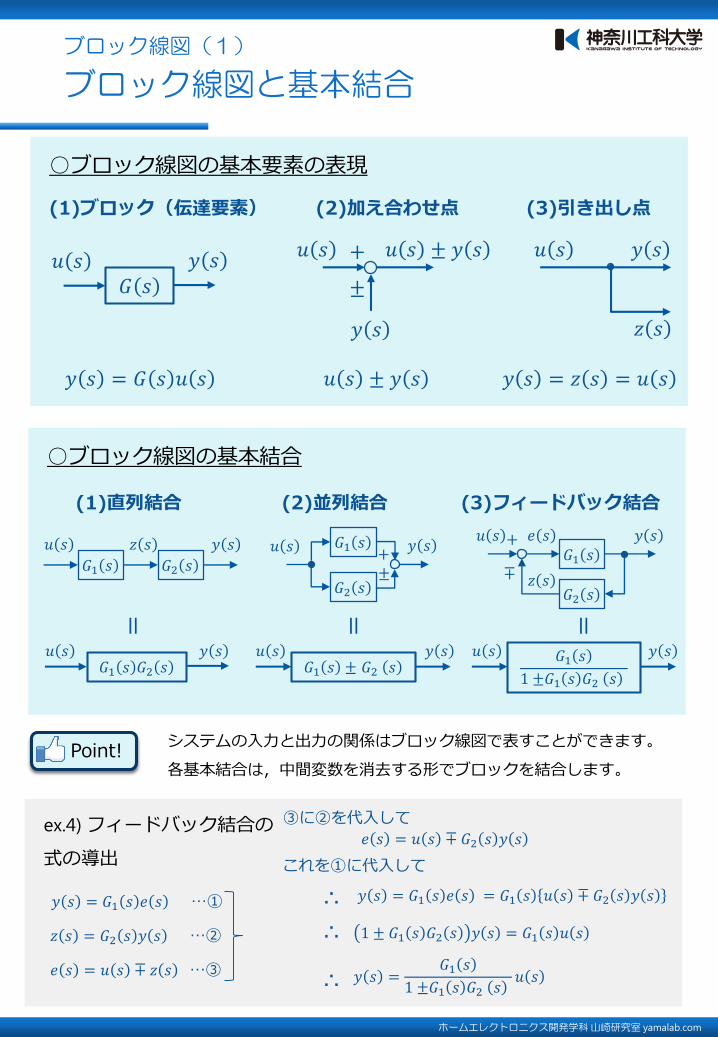
ブロック線図(1)
ブロック線図と基本結合
Point!
○ブロック線図の基本要素の表現
(1)ブロック(伝達要素) (2)加え合わせ点 (3)引き出し点
システムの入力と出力の関係はブロック線図で表すことができます。
各基本結合は,中間変数を消去する形でブロックを結合します。
𝑢 𝑠 𝑦 𝑠𝐺 𝑠
𝑢 𝑠 𝑢 𝑠 ± 𝑦 𝑠
𝑦 𝑠
±
+
𝑢 𝑠 ± 𝑦 𝑠𝑦 𝑠 = 𝐺 𝑠 𝑢 𝑠
𝑢 𝑠 𝑦 𝑠
𝑧 𝑠
𝑦 𝑠 = 𝑧 𝑠 = 𝑢 𝑠
○ブロック線図の基本結合
(1)直列結合 (2)並列結合 (3)フィードバック結合
𝑢 𝑠 𝑧 𝑠
𝐺1 𝑠 𝐺2 𝑠
𝑦 𝑠
𝐺2 𝑠
𝐺1 𝑠𝑢 𝑠 𝑦 𝑠
𝑧 𝑠
𝑒 𝑠
±
+
𝑢 𝑠 𝑦 𝑠𝐺1 𝑠 𝐺2 𝑠
𝑢 𝑠 𝑦 𝑠𝐺1 𝑠 ± 𝐺2 𝑠
𝑦 𝑠
𝐺2 𝑠
𝐺1 𝑠𝑢 𝑠
±+
𝑢 𝑠 𝑦 𝑠𝐺1 𝑠
1 ±𝐺1 𝑠 𝐺2 𝑠
= ==
ex.4) フィードバック結合の
式の導出
𝑦 𝑠 = 𝐺1 𝑠 𝑒 𝑠 …①
𝑧 𝑠 = 𝐺2 𝑠 𝑦 𝑠 …②
𝑒 𝑠 = 𝑢 𝑠 ∓ 𝑧 𝑠 …③
𝑒 𝑠 = 𝑢 𝑠 ∓ 𝐺2 𝑠 𝑦 𝑠
𝑦 𝑠 = 𝐺1 𝑠 𝑒 𝑠 = 𝐺1 𝑠 𝑢 𝑠 ∓ 𝐺2 𝑠 𝑦 𝑠
1 ± 𝐺1 𝑠 𝐺2 𝑠 𝑦 𝑠 = 𝐺1 𝑠 𝑢 𝑠
𝑦 𝑠 =𝐺1 𝑠
1 ±𝐺1 𝑠 𝐺2 𝑠𝑢 𝑠
③に②を代入して
これを①に代入して
∴
∴
∴

ブロック線図(2)
PID制御と伝達関数
Point!
○PID制御の伝達関数表現
伝達関数𝐺 𝑠 を持つ制御対象にたいしてPIDコントローラ(PID制御
器)を用いるときを考えてみましょう。PIDコントローラの伝達関数
は,比例項,積分項,微分項を並列結合したものなので
𝐶 𝑠 = 𝐾𝑝 + 𝐾𝑖1
𝑠+ 𝐾𝑑𝑠
となります。これを制御対象に伝達関数に直列に結合し,フィード
バック結合を考えればよいでしょう。
ex.5) PI制御
右図のように制御対象が一次遅れ
要素であるときに右図の伝達関数を
持つPI制御器を用いる。
このステップ応答は𝐾によって
どのように変わるか。
解) PI制御器の入力点から出力点までの伝達関数をもとめると,
𝐺 𝑠 = 𝐾 + 𝐾1
𝑠
1
𝑠+1= 𝐾
𝑆+1
𝑠
1
𝑠+1=𝐾
𝑠
よって閉回路の伝達関数𝑊 𝑠 は
𝑊 s =𝐺 𝑠
1+𝐺 𝑠=
𝐾
𝑠+𝐾よって 𝑦 s = 𝑊 s 𝑢 𝑠 =
𝐾
𝑠+𝐾∙1
𝑠
∴ 𝑦 𝑡 = 1 − 𝑒−𝐾𝑡 となり, 𝑲が大きくなるにしたがって収束が速くなることがわかる。
𝐺 𝑠+ 𝑦 𝑠
𝐾𝑖1
𝑠
𝐾𝑝
𝑢 𝑠 ++
𝐾𝑑𝑠
+-
PIDコントローラ
𝑒 𝑠 𝑧 𝑠
𝐶 𝑠 = 𝐾𝑝 + 𝐾𝑖1
𝑠+ 𝐾𝑑𝑠
1
𝑠 + 1
+ 𝑦 𝑠𝐾
𝑢 𝑠 +
𝐾1
𝑠
+-
𝑡
𝑦(𝑡)
1
𝐾小
𝐾大

ホームエレクトロニクス開発学科山崎研究室 yamalab.com
インバータとコンバータ(0)
PWM制御 (Pulse Width Modulation:パルス幅変調)
Point!
○2値の電圧から連続値をつくる
HighとLowを高速で切り替えると,平均電圧が出力されているように見えます。パルス幅を変えることによる出力電圧を調整できます。
時刻t
電圧V
Low
High
時刻t
電圧V
Low
High平均電圧
1周期
High
時刻t
電圧V
Low
High t
電圧
Low
High
t
電圧
Low
High
電圧
Low
High
t
電圧
Low
High
t
2値制御(ON/OFF制御) PWM制御
LEDの明るさ制御
サーボモータの位置制御
DCモータの速度制御
LEDの点灯・消灯
DCモータのON・OFF
ホームエレクトロニクス開発学科山崎研究室 yamalab.com
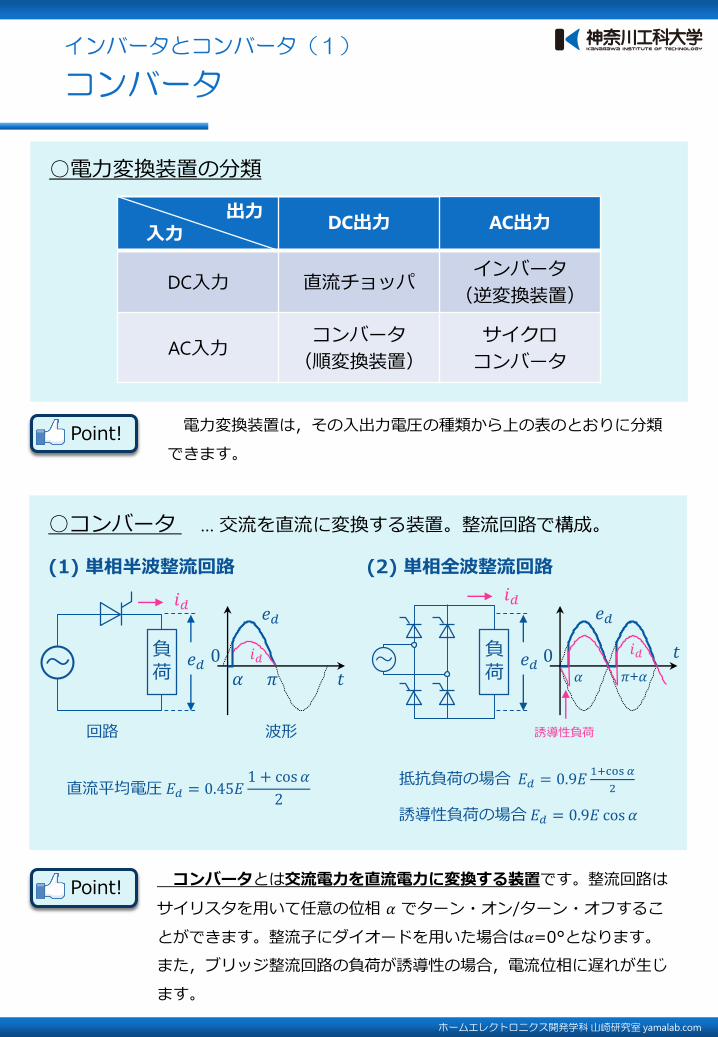
インバータとコンバータ(1)
コンバータ
Point!
○電力変換装置の分類
電力変換装置は,その入出力電圧の種類から上の表のとおりに分類
できます。
出力入力
DC出力 AC出力
DC入力 直流チョッパインバータ
(逆変換装置)
AC入力コンバータ
(順変換装置)
サイクロ
コンバータ
○コンバータ … 交流を直流に変換する装置。整流回路で構成。
(1) 単相半波整流回路 (2) 単相全波整流回路
~負荷 𝑡
𝑒𝑑
0
𝜋𝛼
𝑖𝑑
回路 波形
~負荷
𝑡
𝑒𝑑
0𝜋+𝛼𝛼
𝑖𝑑𝑒𝑑 𝑒𝑑
𝑖𝑑𝑖𝑑
誘導性負荷
直流平均電圧 𝐸𝑑 = 0.45𝐸1 + cos𝛼
2
抵抗負荷の場合 𝐸𝑑 = 0.9𝐸1+cos 𝛼
2
誘導性負荷の場合 𝐸𝑑 = 0.9𝐸 cos 𝛼
Point! コンバータとは交流電力を直流電力に変換する装置です。整流回路は
サイリスタを用いて任意の位相 𝛼 でターン・オン/ターン・オフするこ
とができます。整流子にダイオードを用いた場合は𝛼=0°となります。
また,ブリッジ整流回路の負荷が誘導性の場合,電流位相に遅れが生じ
ます。

ホームエレクトロニクス開発学科山崎研究室 yamalab.com
インバータとコンバータ(2)
Hブリッジ回路とインバータ
○Hブリッジ回路 スイッチのON/OFFの組み合わせで電流方向が反転
ex.6) 誘導性負荷とトランジスタインバータ
誘導性負荷が接続されたトランジスタインバータの基本回路を右図に示す。この回
路が方形波インバータとして定常動作しているときの電圧 𝑣,および電流 𝑖はグラフ
波形のようになる。このとき𝑡0,𝑡1,𝑡2,𝑡3の各期間におけるベース電流を与えられた
トランジスタと,バブルデバイスの通電状態は下表のとおりになる。
+-負荷
-+負荷
①
③
④
②
①
③
④
②
Point! インバータとは直流電力を交流電力に変換する装置です。Hブリッジ回路
ではスイッチ①③を閉じた時と②④を閉じた時で,電流方向が反転します。
これを交互に繰り返すと,負荷にたいして交流波形(方形波/矩形波)が得
られます。このスイッチを,サイリスタまたはトランジスタなどの半導体ス
イッチに置き換えたものが電圧型インバータです。電圧型インバータでは,
誘導負荷の遅れ電流成分を直流電源に帰還させるため,サイリスタと並列に
帰還ダイーオードを接続します(ex.6を参照)。
得られる交流波形(方形波)
𝑡
𝑉
0
①③をON ②④をON
交互に
繰り返し
𝐷3
𝐷4
𝐷1
𝐷2
𝑇𝑟1
𝑇𝑟2
𝑇𝑟3
𝑇𝑟4
𝑖𝑉
𝑣
負荷
図 トランジスタインバータの基本回路 図 定常動作時の電圧 𝑣 および電流 𝑖
𝑡
𝑣
0
𝑖
𝑖
𝑣
𝑡0 𝑡1 𝑡2 𝑡3
𝑡0 𝑡1 𝑡2 𝑡3べース電流が与えられているトランジスタ 𝑇𝑟1 と 𝑇𝑟4 𝑇𝑟2 と 𝑇𝑟3
通電状態にあるトランジスタ 𝐷1 と 𝐷4 𝑇𝑟1 と 𝑇𝑟4 𝐷2 と 𝐷3 𝑇𝑟2 と 𝑇𝑟3





























